Embed Size (px)
Citation preview

ANALYST, JUNE 1993. VOL. 118 695
Extended Kalman Filter for Multiwavelength, Multicomponent Kinetic Determinations*
Brett M. Quencer and Stanley R. Crouch Department of Chemistry, Michigan State University, East Lansing, MI 48824, USA
A n extended Kalman filter has been applied to extract concentration data from mult icomponent kinetic data obtained at several wavelengths with varying amounts of spectral overlap of the products. Simulations are used to show the effect of different variables on the results obtained by the filter. The effects of random noise and initial rate constant estimates on the results are discussed. If spectral differences are sufficient, accurate estimates of concentration are obtained even i f the two rate constants i n a two-component system are identical. Other factors affecting the estimates of the filter are discussed. The extended Kalman filter is shown to be an excellent data analysis method for mult icomponent kinetic determinations. Keywords: Extended Kalman filter; multicomponent; kinetic method; computer simulation
The introduction of scientific instruments that collect large amounts of data in short time periods has necessitated the development of new data analysis methods. One of the methods that has found increasing popularity for this task in recent years is the Kalman filter.1 This filter has been applied in many areas of analytical chemistry2J and has also been utilized by several research groups for kinetic determina- tions.61" Most of these studies have used a linear Kalman filter for estimating concentrations. The use of a linear estimator to estimate a non-linear function requires that the rate constant be known and be invariant from run to run, which can be difficult to achieve as rate constants are usually functions of temperature, pH, ionic strength and other factors.
Multicomponent kinetic determinations, also known as differential kinetic methods, have been used for a number of years in analytical chemistry. 11-16 These methods take advan- tage of differences in the rate constants of parallel reactions and allow the simultaneous determination of two or more analytes. With the advent of multiwavelength detection systems for absorption or fluorescence spectrometry, it is now possible to obtain complete spectra as a function of time and to use data from multiple wavelengths for kinetic determina- tions.
This paper discusses how the non-linear or extended Kalman filter can be used for multicomponent kinetic determinations. By using the non-linear form of the filter, the rate constant need not be known precisely and is no longer required to be constant from run to run, thereby allowing for improved precision and accuracy in the determinations. Information from two or more wavelengths is used, which allows spectral as well as kinetic differences to be used. Rutan and Brown4 used a variation of this by scanning spectral peaks as a function of time, and then used the extended Kalman filter to fit the data. However, at each point in time, only one wavelength was used in the analysis. More recently, Pefia et a1.17 developed an alternative approach, known as the kinetic wavelength-pair method that takes advantage of the greater amount of information made available with a diode- array detector. However, this technique is not applicable to systems where there is a common product; no studies were carried out to determine the effects of noise.
We discuss here the advantages of using an extended Kalman filter for multicomponent kinetic determinations. Simulations are used to show the effect of modifying parameters such as reagent concentrations and rate constants
* Presented at the 4th International Symposium on Kinetics in Analytical Chemistry, Erlangen, Gcrmany, September 27-30, 1992.
of the reacting components. It is shown that as long as sufficient spectral differences are present, accurate results can be obtained regardless of rate constant ratio. The effcct of random noise is investigated, and the influence of initial filter inputs on accuracy studied. The utility of this approach to multicomponent kinetic determinations is discussed, and conclusions about the future of the method are made.
Theory Extended Kalman Filter
Because the Kalman filter and extended Kalman filter algorithms have been described in detail elscwhcre,2~4~~ only a brief description is given here. The Kalman filter requires two equations. The first describes the system dynamics, or how the measurements vary with one or more independent variables. The second equation describes the measurement process, and how the measured values relate to the parameters dcsired. The adjustable parameters of the model are known as the state vector. Estimates of each of the parameters in the state vector (e.g., the state parameters) are adjusted after each measure- ment. State variables can be either static or dynamic. Most applications in chemistry have used static models. By using a static model, the algorithm is simplified, because the identity matrix describes how the state vector propagates between measurements. The algorithm defines how estimates of the state vector evolve with each measurement. The filter uses differences between observed and predicted measurcrnents to adjust the values of the state vector and the estimated errors in the parameters, which are described in a co-variance matrix. At the beginning of the filtering process, no prior knowledge of species concentration is available and therefore the filter is not able to provide an accurate estimate of the absorbance (or of the concentration). As more data points are obtained, more knowledge of the system is gleaned, and the estimates for the absorbance (and concentration) become more accurate. The final estimate of the filter can be used to regenerate the complete reaction progress curve with a high degree of accuracy. The filter assumes Gaussian white noise is present at a level that is user defined. A sample model for a two- component kinetic system is described below.
Multicomponent Kinetic Model
Consider a system of two components, C1 and C2, reacting with a common reagent, R, to form two similar, but not identical products, PI and P2, where k l and k2 are the first- order or pseudo-first-order rate constants. Such a system can be described as follows:
Publ
ishe
d on
01
Janu
ary
1993
. Dow
nloa
ded
by U
nive
rsity
of
Cal
ifor
nia
- Sa
nta
Cru
z on
30/
10/2
014
10:0
7:46
. View Article Online / Journal Homepage / Table of Contents for this issue

696 ANALYST, JUNE 1993, VOL. 118
In a pseudo-first-order system, the kl and k2 values are equal to the products of the second-order rate constants and the concentration of R at any time. If conditions exist such that the concentration of R decreases to a significant extent (more than 1-2%) throughout the course of the reaction, the change in the rate constant can be significant. This deviation from pseudo-first-order conditions is accounted for in the Kalman filter programs used in this study.
The absorbance of the system described in eqn. (1) at any time, t , and any wavelength, j , is given by:
where the E values are the products of molar absorptivity and cell pathlength from Beer's law. Ideally, each product would absorb at a unique wavelength, there would be no spectral overlap, and the reactants would not absorb. More realistically, however, most species absorb to some extent, and there is at least some spectral overlap.
Under pseudo-first-order conditions, the concentrations of C1 and C2 are given by:
[C,], = [Cll0e-k1'; [C,], = [C2]oe-kzt (3) If [PI10 = [P2]0 = 0, the concentrations of the products at time t are given by eqn. (4):
and [R], can be obtained by subtracting the concentration of products from the initial reagent concentration as shown in eqn. ( 5 ) :
P I , = "0 - ([CllO - [CllJ - ([C210 - [C,],) (5) If eqns. (3)-(5) are substituted into eqn. (2), the measurement function for this system is obtained:
Air = ( E j c , + E ~ R - E ~ P , ) [ C I I O ~ - ~ ' ~ + (&jC, + EjR - E~'P~)[C210e-k2' -k (EjP, - EjR)[cl]O + (&jPz - EjR)[C210 + E,R[R]O (6)
The measurement function described in eqn. (6) is now expressed as a function of five parameters, [C,],, [C2]o, [RIo, k l , and k2 . By using eqn. (6) as a model for a first-order or pseudo-first-order chemical reaction, information about the unknown concentrations can be obtained, even if the spectra of the reactants and products are severely overlapped. Also, because measurements are taken at several wavelengths, a greater amount of information is available to the filter so that the reaction need not be monitored to completion. Eqn. (6) is used as the model for the extended Kalman filter. As each new data point is obtained, the estimates for [C,],, [C2I0, [RIo, k l , and kz are updated and used as the initial concentrations for the next loop of the filter. The kinetic model used to derive eqn. (6) assumes that the reactions behave independently and there are no synergistic effects.
Experimental Data Processing
All computations described in this paper were carried out on an IBM-compatible 286-type microcomputer equipped with a mathematical co-processor. All programs were written in Microsoft QuickBASIC (version 4.0) using double precision arithmetic. The functional form of the extended Kalman filter used for these studies was identical with that described- elsewhere,4 with changes made in the system dynamics and measurement equations as necessary.
Simulations
Simulated kinetics data were used to test the filter under a variety of conditions, which would be difficult to obtain
experimentally. Exact knowledge of the reaction conditions also allows the user to change one or many parameters at a time to determine their influence on the filter, and thereby provide a better understanding of its advantages and limita- tions. Data were generated using a full second-order kinetic model with the common reagent R in excess. The filter assumes that the data follow a first-order or a pseudo-first- order model. The second-order system was used for the data to avoid biasing the filter by using the same model for data analysis as for data generation. Because the filter also estimates the concentration of [Rlo, small variations in its concentration are tolerated. Random noise was added to all synthetic data. The added noise was Gaussian in nature, with a zero mean to simulate white noise. The standard deviations of the added noise, snoise, is user specified.18 All studies listed contained 100 data points unless otherwise specified. It was also possible to vary the number of wavelengths used for the simulations. In the present study, the number varied from one to six wavelengths. Studies were performed on one-, two- and three-component systems. The equations for the two-com- ponent model are described above in eqns. (1)-(6). Deriva- tions for fewer or additional components are similar.
As the extended Kalman filter is a recursive algorithm, it is necessary to provide initial estimates of the state parameters. Some knowledge of the rate constant is presumed, and an approximate value is provided to the filter as an initial estimate. The initial values of the rate constants input to the filter were varied by as much as 50% in the simulations; the results are presented later. Also, the initial concentration of the common reagent should be known, so this value was provided to the algorithm with no error. The concentrations of the reactants are assumed to be unknown as are the quantities desired from the filter. In order to avoid bias the initial estimates provided to the filter for reactant concentrations - were zero.
Although providing the expected values of the rate con- stants and the common reagent concentration to the filter is not strictly necessary, it does help to speed up the filtering process. Acceptable values for all parameters can usually be determined without prior knowledge of any of the parameters, but multiple passes through the algorithm are necessary.
Results and Discussion Most simulations were carried out on the two-component system. The use of this system is a compromise because the filter is capable of accurate results on more complex systems. However, the smaller number of variables makes it more amenable to rigorous study.
The concentrations, rate constants and molar absorptivities used are given in Table 1. These values were held constant throughout all the simulations unless otherwise noted. In cases where the concentrations were varied, the starting values were those given in Table 1.
For all studies discussed in this paper, 100 data points were collected over a constant total elapsed time period. Different numbers of wavelengths were used, but data were always generated for each wavelength at each point in time. This procedure was followed because the diode array spectrometer system being used for experimental verification of the simulation studies is capable of storing only 100 scans. Therefore, in order to match experimental capabilities, the simulated data were limited to only 100 points. However, the effect of changing the data interval, and the total number of points was investigated, and it was found that the most important factor affecting the accuracy of the filter estimates was not number of data points or data interval (although at extremely short intervals oversampling became problematic), but was the percentage completion to which all reactions were sampled.
Publ
ishe
d on
01
Janu
ary
1993
. Dow
nloa
ded
by U
nive
rsity
of
Cal
ifor
nia
- Sa
nta
Cru
z on
30/
10/2
014
10:0
7:46
. View Article Online

ANALYST, JUNE 1993, VOL. 118 697
Table 1 Values of molar absorptivity x pathlength (1 mol-I) used for simulations unless otherwise noted. [Cll0 = 0.0001 mol 1-l , [C2l0 = 0.0001 mol I - ' , [RIo = 0.01 mol I - ' , k l = S O s-I, k2 = 10-50 s r l
h ec, EC.2 ER + L EF2
1 0 0 10 so00 2500 2 0 0 S 2500 SO00
L
E 0.9 a, c 8 0.8 W c !? 0.7
t l
.E 0 20 40 60 80 100 W Percentage completion c
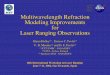
Fig. 1 completion of the reaction. [C,], = 1 X
Error in estimated concentration of [Cll0 versus percentage mol 1-l; k = 100 s-l
Error Versus Percentage Completion
Throughout the course of the simulations, it became apparent that one of the factors affecting the accuracy of the estimates was the extent of the reaction that was monitored. The error in estimated concentration versus percentage completion of the reaction is shown in Fig. 1. Although these results were obtained with only one component, the same trend holds true for each component in a multicomponent mixture. As can be seen, the estimates become more accurate as the extent of reaction increases. This increased accuracy is primarily a result of the time required for the Kalman filter to converge (as can be seen in Fig. 1). For analytical purposes it would be desirable to obtain results as rapidly as possible and thus to use a small extent of reaction. In order to obtain accurate results (<5% error), it was generally necessary to follow each reaction to approximately 50--60% of completion. This is in agreement with results reported by Mieling and Pardue19 for the predictive kinetic approach. These workers found that it was necessary to follow a reaction for 1-2 half-lives (50-75% complete) in order to predict the final equilibrium position accurately. However, in competing parallel reactions, if the faster reacting species is greater than 50% reacted, while the slower species is not, the estimates from the first reaction can be accurate, while those from the slower reaction are not. (The estimates from the faster reaction are not, of course, as accurate as they would be in the absence of the slower reaction.) The accuracy of the estimated concentrations is almost independent of other species in the mixture, as long as there are sufficient spectral differences.
The effect of varying the concentrations of the reactants was investigated for a two-component mixture. This study was carried out in tandem with another in which the ratio of the two rate constants was varied. For each rate constant ratio and concentration ratio, the simulation was repeated 9 times, and the average error is presented. The results of these studies appear in Figs. 2 and 3. The average error in the estimated concentrations of C1 and C2 when C2 is held constant is shown in Fig. 2, whereas the average error when C1 is held constant is shown in Fig. 3. Note in Fig. 2(a) for all values tested, the largest error in estimated concentration was still less than 5 % . Fig. 2(b) and 3(b) show that even though the errors in the estimated concentration of C2 are greater, the largest errors
4/ 3.5 4
3 - l I 1 1 II 1
- g 2.5
0 ' 2 L
1.5
1
0.5
W
0 1
20
s Y , 15 0 L g 10 w
5
0 . I
1
Fig. 2 ( a ) Error in the average estimated concentration of Cl as a function of concentration ratio and rate constant ratio (concentration of C2 constant for all experiments). (b) Error in the average estimated concentration of C2 as a function of concentration ratio and rate constant ratio (concentration of C1 constant for all experiments)
are found at rate constant ratios corresponding to a small percentage completion of the reaction of C2 and at concentra- tion ratios where C2 is a much smaller value than C1. Also, in the majority of experiments, the error was less than 5 % . It seems likely that if the reaction were followed for a longer time where errors were highest, accuracy would be improved. For example, under the conditions used for these simulations, at the end of data collection when the rate constant ratio is 5.0, the second reaction is only 39% complete, whereas the first reaction is 92% complete at the end of the analysis. Following the second reaction to 5 M 0 % of completion would improve the results for both components, as can be seen in Fig. 1; however, the improved estimates would be greater for the second reaction. These experiments follow the general trend of improving accuracy as the responses of the components become approximately equal, and the reaction is sampled for at least 1-1.5 half-lives.
Spectral Overlap
Simulation studies were performed for the kinetic determina- tions of mixtures in which the products absorb with varying amounts of spectral overlap. The same kinetic behaviour was assumed for these studies as that shown in Table 1. Three cases were tested: none, medium and severe spectral overlap. Molar absorptivities for the three cases are given in Table 2. The estimated concentration of component C2 for no, medium and severe overlap is shown in Figs. 4-6, respectively. The
Publ
ishe
d on
01
Janu
ary
1993
. Dow
nloa
ded
by U
nive
rsity
of
Cal
ifor
nia
- Sa
nta
Cru
z on
30/
10/2
014
10:0
7:46
. View Article Online

698 ANALYST, JUNE 1993, VOL. 118
e* 8 I 4:r 3.5 A
I . .A
Fig. 3 ( a ) Error in the average estimated CI as a function of concentration ratio and rate constant ratio (C, constant for all experiments). ( h ) Error in the average estimated C2 as a function of concentration ratio and rate constant ratio (C , constant for all experiments)
Table 2 Molar absorptivities for spectral overlap study. Concentra- tions and rate constants appear in Table 1
No overlap Medium overlap Total overlap
A, A2 A1 1 2 1 1 A2
EC., 0 0 0 0 0 0 EC2 0 0 0 0 0 0 ER 10 5 10 5 10 5 Ep, 5000 0 5000 2500 5000 5000 EP.? 0 5000 2500 5000 5000 5000
0.9 I ' I I I l l I J 1 - 1.5 2 2.5 3 3.5 4 4.5 5
Fig. 4 Estimated concentration of C2 as function of kllk? with no spectral overlap. Solid line = true concentration; broken line = 5% error bars
kdk2
r
I
0
- -
0 r . 0"
2
1.6
r
I - 5 1.2 E d I
0.8 k
0" 0.4
0
I : :
1 1.5 2 2.5 3 3.5 4 4.5 5 kllk2
Fig. 5 Estimated concentration of C2 as a function of kllk2 with medium spectral overlap. Solid line = true concentration; broken line = 5% error bars. ( a ) Two wavelengths and (b) one wavelength
0
0 0
0 0
-4
0 -5 I I * I I I I
1 l*.5 2 2.5 3 3.5 4 4.5 5 kdk2
Fig. 6 Estimated concentration of C2 as a function of kllk2 with total spectral overlap. Solid line = true concentration; broken line = 5% error bars
response for component C1 was better, as it is the faster reacting species and therefore is sampled to a larger extent of the reaction. The solid line represents the actual concentration and the broken lines represent 5% errors in estimated concentration. Each rate constant ratio was repeated 9 times, and all points are included. In particular note that the error in the estimated concentration decreases with the rate constant ratio for the no and medium overlap cases. This result was unexpected and has not been observed previously. As a comparison, the medium spectral overlap case was repeated using data from only the first wavelength; the results are presented in Fig. 5(b). From this figure, it is apparent that the addition of the second wavelength causes a large increase in the accuracy of the results. Also, there is no improvement with decreasing rate constant ratio. For severe overlap (Fig. 6), the estimated concentrations became inaccurate with decreasing rate constant ratio. In several cases, at relatively large rate constant ratios, the estimated concentration was in error by a large amount (>loo%). The reason for this is not clear;
Publ
ishe
d on
01
Janu
ary
1993
. Dow
nloa
ded
by U
nive
rsity
of
Cal
ifor
nia
- Sa
nta
Cru
z on
30/
10/2
014
10:0
7:46
. View Article Online

ANALYST, JUNE 1993, VOL. 118
however, the statistics provided by the filter ( e . g . , co-variance matrix) let the user know that there is a problem with the fit, and another trial can be carried out. Many molar absorptivity values, for all components, were tested, although not as thoroughly as those described here. Examples were tested where one, some or all components exhibited absorbance at the wavelengths used. The only cases where the filter was not able to obtain accurate estimates were when there was no absorbance change thoughout the course of the reaction. Of course, other methods would also fail under these conditions.
Mixtures of species with rate constant ratios as low as unity were determined as long as there were sufficient spectral differences. In these cases, the rate constant ratio did not affect the ability of the filter to obtain accurate concentration estimates. As long as all the reactions were followed for a long period of time, accurate results were obtained. Severe spectral overlap still allowed determination of reactant concentrations in most cases. As the amount of spectral overlap increases, it becomes necessary to use more wavelengths in order to obtain accurate concentrations from the filter. The filter has been tested using up to six wavelengths, and it will accept as many as the user desires up to the memory limit of the computer used. The problem with using a greater number of wavelengths is the trade-off in the amount of time required to obtain the estimates. The increase in data analysis time is not linear with an increasing number of wavelengths. This is due to the necessity to invert an rn x rn matrix, where rn is the number of wavelengths used. In general, it is advisable to use the minimum number of wavelengths necessary in order to obtain
.9
1
Fig. 7 Error in ( a ) the average estimated concentration of C2 and ( b ) the standard deviation of the mean of C2, as a function of rate constant ratio and the standard deviation of the noise (absorbance units)
699
estimates with an acceptable amount of error to the user. In practice, this might require some initial experimentation, but once the number of wavelengths required for a given system is known, it should remain constant. Of course, as microproces- sors become faster, the number of wavelengths that can be analysed in a given time should increase, and this method should become even more powerful.
Effect of Random Noise
The effect of varying the amount of noise added to the simulated data was investigated. The noise added to the true absorbance was Gaussian in nature, and its standard deviation was user-controlled. The standard deviations(s) of the absorb- ances for this study varied from 0.001 to 0.9, and five replicate
".d
0 1 2 3 4 5 Tim e/s
Fig. 8 Absorbance and estimated absorbance for k l lk2 = 1.20 and standard deviation of the noise of 0.10. Solid line = true absorbancc; + = estimated absorbance.
25
* 25 3
Fig. 9 Error in estimated concentration of ( a ) C, and (b) C2 as a function of the initial estimates for the rate constants when kllk2 = 5.00
Publ
ishe
d on
01
Janu
ary
1993
. Dow
nloa
ded
by U
nive
rsity
of
Cal
ifor
nia
- Sa
nta
Cru
z on
30/
10/2
014
10:0
7:46
. View Article Online

700 ANALYST. JUNE 1993. VOL. 118
20 18 16 -
&? l 4 'L 12
L 10 u g 8 w 6
4 2 0 1
25 .. 25
50 20 - g 40 x?
0" 30 0
: 20
Y, 15 1
I L
? 10
10 5
W w
0 25 0 25 1 2
Fig. 10 Error in estimated concentration of ( a ) C1 and (b) C2 as a function of the initial estimates for the rate constants when kl lk2 = 2.00
determinations were made with each set of conditions. The signal-to-noise ratio (S/N) was 848 when both reactions are complete and s = 0.001, and was 0.942 when both reactions are complete and s = 0.9. Fig. 7 shows the error in the average estimated concentration of C2 [Fig. 7 ( a ) ] , and the correspond- ing value for s of the mean estimated concentration of C2 [Fig. 7(b)] versus snOise and the rate constant ratio. Errors for component C, were generally less severe as this reaction is followed to a greater extent of completion in all cases except when the two rate constants are equal. In general, excellent accuracy (<5% error) was maintained as long as snOise was less than approximately 0.1, which corresponds to a S/N of 4 . 5 at the completion of both reactions. Fig. 8 shows the absorbance versus time curve for an example with an snOise of 0.1, and a rate constant ratio of 1.2. The estimated concentrations for this experiment were: C1 = 9.63 x mol 1-1 and C2 = 1.05 x 10-4 moll-1.
If an error of <20% is acceptable, the snOise value can be as high as 0.5, corresponding to a S/N of 1.7 at completion. Overall, the filter is highly tolerant of noise, and is able to yield accurate results at very poor S/N values.
Effect of Varying Estimated Rate Constant
As the Kalman filter is recursive in nature, it requires initial estimates for the parameters. As mentioned previously, to avoid biasing the filter the initial estimates provided to the filter for the unknown concentrations are 0. Also, as the
Fig. 11 Error in estimated Concentration of (u ) C1 and ( b ) Cz as a function of the initial estimates for the rate constants when kllk2 = 1.00
concentration of the common reagent is known, this value is provided to the filter. Some knowledge of the value of the rate constants is necessary in order for the filter to calculate accurate estimates of the concentrations. However, rate constants are dependent on temperature, pH, ionic strength, as well as other factors. Therefore, the value of the rate constant can change from sample to sample. With carefully controlled reaction conditions, this variation can be mini- mized, but not totally eliminated.
In order to determine the effect of inaccurate estimates of the rate constants on the results of the filter, a study was performed in which the values of the rate constants given to the filter were varied from 50 to 150% of the actual value. Three cases were studied. In all cases, the value of k l was kept constant at 50 s-l, while k2 was given values of 10, 25 and 50 s-1 in the three cases. This corresponds to rate constant ratios of 5 , 2 and 1. Plots of error in the estimated concentrations of both components versus the input values of the rate constants for the three cases are shown in Figs. 9-11. As is apparent from the charts, errors are at a minimum for values of kl and k2 closest to the true values, and generally become worse as estimates become further from the true values. As long as the estimate for the rate constants is within lo%, the error in the estimated value of C1 was less than 2.5% , and the error for C2 was less than 16% (this error decreases to 2.5% as k2 approaches k l ) . Also, in general, it seems to be preferable to overestimate the rate constants, rather than to underestimate them.
Publ
ishe
d on
01
Janu
ary
1993
. Dow
nloa
ded
by U
nive
rsity
of
Cal
ifor
nia
- Sa
nta
Cru
z on
30/
10/2
014
10:0
7:46
. View Article Online

ANALYST, JUNE 1993. VOL. 138 70 I
Other Considerations
The filter performed remarkably well over a large range of concentrations, as long as the change in absorbance was approximately 0.05-0. I , and as long as there is a reasonable S/N level. The filter was also tested at a variety of molar absorptivity values for all components. The only area where it failed was when the reactants and products had the same molar absorptivity such that there was no absorbance change observable. The filter was able to estimate concentrations from this level up to a level where the accuracy of the absorbance measurements would be instrument-dependent. Generally, this allows linearity over 2 4 orders of magnitude.
The filter is also able to perform other functions. For example, using eqn. (6), the final absorbance for the reaction can be estimated at each point. The accuracy of this estimate is also dependent on the extent of the reactions, and the error becomes acceptable when 1-1.5 half-lives have been com- pleted. This provides a way of performing predictive kinetic determinations.19 As the absorbance of a system at equilib- rium is often less dependent on temperature, pH and ionic strength (as is a dynamic system), such a predictive approach would provide additional error compensation.
The use of the extended Kalman filter and multiple wavelengths to perform multicomponent kinetic determina- tions offers several advantages. First, the non-linear filter does not depend on knowing precisely the rate constants of the reacting components. Although some knowledge of rate constants is necessary, accurate results can be obtained as long as the value given to the filter initially is within 10% of the true value. By using multiple wavelengths, the kinetic constraints of previous approaches have been overcome. As long as spectral differences exist, accurate results are obtained even if the reactions occur at exactly the same rate. The filter is fast, often taking of the order of several data points per second (depending on the number of components and the number of wavelengths). This allows the possibility of data analysis in real-time as long as the reactions are sufficiently slow.
References Kalrnan, R. E., Trans. ASME, Ser. D. J . Basic Eng., 1960,82, 35. Brown, S. D., Anal. Chim. Acta, 1986, 181, 1. Brown, S. D., Barker, T. Q., Larivec, R. J . , Monfre, S. L., and Wilk, H. R., Anal. Chem.. 1988,60,252R. Rutan, S. C., and Brown, S. D., Anal. C'him. Actu, 1985, 167, 23. Corcoran, C. A. , and Rutan, S. C., Anal. Chem., 1988, 60, 1146. Corcoran, C. A. , and Rutan, S. C., Anal. Chem., 1988, 60, 2450. Rutan, S. C., Fitzpatrick, C. P., Skoug. J . W., Weiser, W. E., and Pardue, H. L., Anal. Chim. Acta, 1989, 224. 243. Wentzell, P. D., Karayannis, M. I . , and Crouch, S. R., Anal. Chim. Acta, 1989, 224, 263. Xiong, R., Velasco, A., Silva, M.. and Pkrez-Bcndito, D., Anal. Chim. Actu, 1991, 251, 313. Wentzell, P. D., and Vanslykc, S. J . , Anal. Chim. Actu, 1092, 257, 173. Mark, H. B . , Jr., and Rcchnitz, G. A., Kinetics in Analytical Chemistry, Wiley, New York, 1968, pp. 142-231. Mottola, H. A. , Kinetic Aspects of Analytical Chemistry, Wiley, New York, 1988, pp. 122-148. PCrcz-Bendito. D., and Silva, M., Kinetic Methods in Analytical Chemistry, Wiley, New York, 1988, pp. 149-189. Pardue, H. L.. Anal. Chim. Acta, 1989, 216, 69. Ridder, G. M., and Margerum, D. W., Anal. Chem., 1977,49, 2090. Willis, B. G., Woodruff, W. H . . Frysinger, J . R., Margerum, D. W., and Pardue, H. L., Anal. C'hem.. 1970,42, 1350. Pciia, J . M., Rubio, S . , and Percz-Bendito, D., Anal. Chim. Acta, 1991, 244, 81. Kaufman, L., TrAC, Trend5 Anal. Chem., 1983, 2, 244. Mieling, G. E. , and Pardue, H. L., Anal. Chem., 1978,50, 161 1.
1
2 3
4
5
6
7
8
9
10
11
12
13
14 15
16
17
18 19
Paper 2105655K Received October 23, 1992 Accepted January 25, 1993
Publ
ishe
d on
01
Janu
ary
1993
. Dow
nloa
ded
by U
nive
rsity
of
Cal
ifor
nia
- Sa
nta
Cru
z on
30/
10/2
014
10:0
7:46
. View Article Online