Embed Size (px)
Citation preview

1 of 12
Dante is a tethered walking robot capable of climb-ing steep slopes. In 1992 it was created at CarnegieMellon University and deployed in Antarctica toexplore an active volcano, Mount Erebus. TheDante project’s robot science objectives were todemonstrate a real exploration mission, rough ter-rain locomotion, environmental survival, and self-sustained operation in the harsh Antarctic climate.The volcano science objective was to study theunique convecting magma lake inside Mount Ere-bus’ inner crater. The expedition demonstrated theadvancing state-of-art in mobile robotics and thefuture potential of robotic explorers. This paperdetails our objectives, describes the Dante robot,overviews what happened on the expedition anddiscusses what did and didn’t work.
We would like to acknowledge the people whosecontributions made Dante and the expedition toMount Erebus possible. The mechanism wasdesigned and assembled by Eric Hoffman of K2TInc., Matt Arnold, Tad Dockstader, and DimitriosApostolopoulous. The electronics were fabricatedby Bryon Smith, Dan Christian and Scott Boehmke.Paul Keller, Jay West, Chris Fedor, Bill Ross, DanChristian, and Henning Pangels implemented soft-ware so that Dante could sense, plan, communicate,and walk. Leslie Thorpe sewed weatherproof cov-ers. Chuck Whittaker of RedZone Robotics Inc.,Rob McWilliams, and Jim Osborn managed theproject. Jim Martin, Gary Baun, Brian Albrecht,Jim Frazier, Bob Smith and others at Carnegie Mel-lon provided critical assistance whenever it wasneeded. The Erebus expedition group included RedWhittaker, David Wettergreen and Dan Christianfrom Carnegie Mellon, Eric Hoffman from K2TInc., Phil Kyle, Bill McIntosh, Nelia Dunbar andKen Sims from New Mexico Institute of Miningand Technology, and David Lavery, and SteveThompson from NASA.
IntroductionIn 1992 a walking robot named Dante1 wasdesigned and built at Carnegie Mellon University.Using a tensioned tether, Dante can ascend anddescend steep slopes. It is designed to rappel intoand explore active volcanic craters. The Dante
project was an ambitious attempt to proceed, in 10months, from idea to implementation. The culmina-tion was an expedition to an active volcano, MountErebus, in Antarctica.
In terms of robot science, the objectives were todemonstrate a real exploration mission, rough ter-rain locomotion, environmental survival, and self-sustained operation in the cold, windy, bright, rug-ged Antarctic environment. The expedition toMount Erebus was indeed a real mission. Danteclimbed into the steep sided crater, surviving theenvironment and operating in a self-sustaining man-ner until the failure of a critical component, thecommunications tether, necessitated rescue and thepremature termination of the crater exploration.
The volcano science objectives were also real andinvolved the study of Mount Erebus’ unique con-vecting magma lake. Dante was equipped withinstruments to determine the chemical and isotopiccomposition of gas generated by the volcano’smagma lake, to measure the radioactivity of materi-als near the lake and to measure the temperature ofthe magma itself.
Dante can rappel up and down steep slopes and sur-mount obstacles as large as 1 meter in height. It canperceive and model the terrain around it using ascanning laser rangefinder and a trinocular camerasystem. Its planning software determines safe pathsand adjusts the gait to avoid obstacles. While someof its computers reside off-board at a base stationand are linked via a fiber optic cable, Dante is com-putationally self-sufficient, able to chart its owncourse, react to perceived terrain, and acquire datafrom science payload sensors. Dante’s eight panto-graphic legs are organized in frames of four—aninner frame and an outer frame—with each coupledthrough a drivetrain that provides an intrinsic walk-ing motion. To walk, four legs simultaneously lift
1. The robot is named Dante in reference to the poem,The DivineComedy by Dante Alegheri, in which Dante travels to the underworld.Erebus is a cloud of mist that obscures the entry to hell. Early mis-sion scenarios also had a transport robot named Virgil for the Romanpoet who guides Dante during his quest. In keeping with the theme,the cart used to carry Dante around is called Geryon after a flying dae-mon who gave Dante a lift.
Exploring Mount Erebus by Walking Robot
David Wettergreen, Chuck Thorpe, and Red Whittaker
The Robotics Institute, Carnegie Mellon University
In Robotics and Autonomous Systems andin the The Robotics Institute 1992 AnuualResearch Review as “Dante’s Expeditonto Mount Erebus”

2 of 12
and reach forward while the other four supportinglegs propel the body. Each of the legs can individu-ally adjust its height to avoid obstacles in the ter-rain. On steep slopes the tensioned tether provides areactive force to gravity, assists in maintaining equi-librium, and allows Dante to rappel like a mountainclimber
This paper briefly introduces our objectives andMount Erebus, describes the Dante robot, over-views the software system that enabled Dante towalk, and then describes what happened on Erebusand what we learned.
Robot ScienceObjectivesThere are a number of technical challenges indesigning a robot that can rappel into the extremeterrain and environment of a volcanic crater andsurvive. These challenges aligned with our objec-tive to show that a robot explorer could perform anactual exploration mission, that it could handle theterrain and the environment and that it could sustainitself. We wished to demonstrate that a walkingrobot could traverse the rough terrain and steepslopes typified by volcanic craters, somethingbeyond what had been or could be shown in thecontrolled setting of a laboratory. The terrain of avolcanic crater requires that all we have learnedabout legged locomotion be put into practice. Inaddition, the steepness of the slope requires theaddition of a tensioned tether for support. The coor-dination of this element adds complexity but furtherenhances capability of the explorer.
Antarctica presents environmental challengesunmet by robotic explorers. The low temperature,high wind force, intense brightness, and extremeterrain are daunting. This severe setting forcesissues of environmental survival as well as self-sus-tained operation. To be viable, an explorer must beto be rugged and reliable. We wished to take on thedifficulties of ruggedizing the robot to environmen-tal in order to further the reliability of robots in thefield. The survival and success of an extendedrobotic exploration in Antarctica lends credibility tothe use of robotic explorers and advances the state-of-art for terrestrial, lunar and planetary missions.
Although it is a prototype, Dante is not a laboratorydevice—it is a field-worthy robot. Its componentsare selected to withstand the harsh environmentinside a volcano. Its enclosures are sealed andheated. Its lenses are coated against the acidicplume. The metallic surfaces are anodized to hardenthem. The computing is specially rated for extreme
cold. In terms of survival, Dante’s weakness may bethat building it fast and cheap came at the expenseof redundancy. The design approach was to choosesingle solutions, do the best design possible, makeit reliable, and have very few redundant compo-nents. Such a strategy is also dictated when systemweight is a guiding concern as the logistics of anexpedition made it this time. It is a weaknessbecause it means that single points of system failurewill exist.
An essential feature of an explorer is its ability tosustain itself for extended periods of time. Our goalwas to embody Dante with sufficient perceptive andplaning ability to sustain operation. Dante isequipped with perceptive sensors so that it cansense its and environment and proprioceptive sen-sors so that it can sense itself. It has on-board com-puting to provide it with basic capabilities formotion. It has sufficient sensing in its feet alone toallow it to grope through the terrain blindly. Usingits perception and planning abilities Dante can walkautonomously. Without much direction from opera-tors, it should be able to keep going in all but themost difficult of situations.
ScenarioAn untethered robotic device that can climb sheercliff walls is well beyond the state-of-art. We deter-mined the safest and most robust method for explor-ing a crater would be to rappel down the rock faceas a human climber would. Early in the project, weenvisioned the following scenario.
At the beginning of the deployment, Dante wouldbe transported to the crater rim. In order to descendthe steep walls, Dante’s tether, anchored at the rim,would remain under tension to support much or allof the robot’s weight just like a climbing rope. Theterrain outside the crater, between the mountainsidecontrol station and the summit, might consist ofpatches of snow, large boulders and much rockdebris comparable to a plowed field. A fiber opticline would be strung between the summit and thestation across this terrain. In order to reduce weightand to allow for long-duration operation, power andhigh level computing would remain off the robotand be transmitted to the robot via the tether.
The robot would descend the crater wall unreelingtether as it proceeded. The crater walls may haveslopes between 50°-90° and be composed of bothice and rock. These walls would have embeddedlava bombs and possibly fumarole fed ice towersthat must be negotiated. We hoped to find a descentroute of approximately 75° that would drop from

3 of 12
the rim all the way to the bottom of the crater with-out any major obstructions or overhangs. For muchof the mission Dante would be teleoperated byresearchers giving it short commands to walk, or toroll, pitch, yaw, or lift (or lower) while standing inplace. The researchers would use on-board camerasincluding an overview pan-tilt camera to view thesurrounding terrain. Dante would carry terrain sen-sors including a trinocular stereo system and a laserrange-finder which it can use to automatically per-ceive and model the terrain. For some portion ofthe mission we hoped to turn Dante loose, to auton-omously negotiate the crater wall by sensing thelocal terrain and planning its own actions.
As it descended into the crater Dante would per-form remote sensing operations, collect samples,and make photographic records. Although the statedobjective was to reach the bottom, much of the sci-entific agenda would be accomplished during theascent/decent.
The robot may have to cross substantial transitionsin slope during its descent. These transitions mightinvolve coming off the wall of the crater and cross-ing level terrain to the edge of another drop. Atthese edges walls may drop steeply, 80°-90°, downinto the crater. Near the bottom of the inner craterthe robot must transition to rough but level terrainwhere volcanologists would direct it to areas ofinterest. On the crater floor the robot would study ofthe unique convecting magma lake and acquiresamples of gases and particulates.
This descent process would be reversed to return tothe summit—the ascent path is dictated by the posi-tion of the tether during the descent. The robotwould transition from the crater floor to the steepwalls of the crater. It must climb up these, transitionto the changes in slope, and finally pick its wayback to the rim.
Volcano ScienceMount ErebusMount Erebus, situated at 77.53° south latitude and167.15° east longitude, is the only active surfacevolcano in Antarctica. In Figure 1, an ancient sidevent is in the front, the main crater is behind, andthe robot control station which was established forDante is 2km away in the direction of Fang ridgewhich is in the left rear. Erebus rises from the RossIce Shelf on the East Antarctic coast, forming themain peak of Ross Island.
The summit of Mount Erebus is 3794m (12447ft) inheight, although the apparent altitude is higher ofbecause atmospheric pressure decreases near the
Earth’s poles. The summit of Erebus opens into amain crater, a 500m by 600m ovoid, approximately150m deep. This outer main crater contains an innercrater (approximately 200m in diameter and anadditional 100m deep) and an area of active gassingfumaroles. In Figure 1, the inner crater is visiblewithin the outer main crater. The inner crater con-tains more fumaroles and a convecting magma lake.A magma lake is a rare example of volcanic equilib-rium. Fresh magma from deep inside the earth risesto the surface of the lake, releases gases and, havingcooled, sinks down without violently erupting.
The crater walls (interior) have a 75°-90° slope and
Figure 1: Aerial view of Mount Erebus
Figure 2: Top view of Erebus’ crater showing the inner crater

4 of 12
are primarily exposed, solidified, igneous rock withsome areas of ice and snow. Some areas near therim are composed of looser material at a 50° slope.Fumaroles in the crater walls create shelves and for-mations of ice that grow outward from the walls. Toreach the crater floor it is necessary to navigate overor around these obstacles.
Even during the Austral summer, clear skies seldomlast more than a day. There is good visibility on therim about 50% of the time, but the inner crater flooris obscured at least 90% of the time because windsacross the summit hold the plume down in the cratermaking visibility from the rim to the floor a rareevent.
Although it is the most arid continent on earth—some areas may not have had precipitation for thou-sands of years—the humidity inside the crater canbe very high, so the possibility of condensation onequipment exists. Perhaps more critical to a wellsealed system, is the presence of acids, HF, HCl,and H2S, in the plume.
The typical summer wind on Erebus is 10-20 kilo-meters per hour. It does not snow in great quantitiesbut the wind can create white-outs by suspendinghighly-specular ice particles in the air. Such awhite-out can intensify brightness, reduce visibility,make shadows disappear and cause features tobecome indistinguishable.
The summer temperature on Erebus ranges from-50°C to -10°C. The median seems to be around-20°C. The temperature increases when close tothermal sources—the magma lake and high-pres-sure fumaroles are believed to be hotter than600°C—but the temperature gradient is such thatapproach to within a few meters is possible.
ObjectivesThe scientific importance of exploring Mount Ere-bus lies in its uniqueness. Erebus, in addition tobeing a rare Antarctic volcano, contains one of onlythree known convecting magma lakes, in whichfresh magma from deep inside the earth rises,degases, cools and sinks in a continuous convectioncycle. The lake releases Chlorine, Fluorine and Sul-fur into the Antarctic atmosphere in significantquantities.[1] The composition and concentration ofthe gases and the information they provide aboutthe composition of magma is of great interest togeophysical, geochemical and atmospheric scien-tists. Information about gases and particles releasedby any active volcano is extremely rare because ofthe dangers to humans involved in collecting sam-ples.
The principle objective in entering the volcano is toobtain pristine gas samples from the area of the con-vecting magma lake. It is essential that the gas besampled from the magma before it cools and under-goes chemical changes. The convection currentsinside Erebus insure fresh magma arrives at the sur-face. Such pristine gas samples, taken at high tem-perature so that no materials sublimate, areimportant because they reveal much about the pro-cesses deep inside the magma chamber. For exam-ple, a sample may contain isotopes of hydrogen andoxygen that are in a ratio of H2 (deuterium) to O16
and O18 that is different from what is predicted bygeochemical models. Insights into the compositionand nature of magma within the Earth’s mantle arepossible by studying this magma lake.
Gas and filter samples have been taken from Ere-bus’ rim but no gas or aerosol samples have beenacquired close to the source. By identifying thecomposition of gases released from the magma lakeand nearby vents, the effect of venting and eruptingvolcanos on the atmosphere can be better under-stood. Atmospheric scientists are specifically inter-ested in the types and quantities of gases releasedinto the Antarctic environment. The plume dis-perses across the East Antarctic ice sheet spreadingCl and F. The amount of these elements releasedmay be directly correlated to the amount depositedin the ice revealing a historic record of volcanicactivity.
Dante HardwareIn comparison to wheeled mechanisms, leggedmechanisms require complex design, move slowly,and are difficult to control. However, for locomo-tion over rough or discontinuous terrain such as thecrater of a volcano, legged mechanisms are poten-tially superior to wheeled mechanisms. Leggedmechanisms make discrete terrain contacts andavoid undesirable footholds and large discontinui-ties while wheeled mechanisms have rollers in con-tinuous contact with the ground. The posture ofmost wheeled mechanisms is dependent upon theterrain, but a legged mechanism can isolate its bodyfrom the terrain.[2] By adjusting its legs and thetension on the tether, a rappelling walker canachieve a stable stance and smooth motion even onnearly vertical inclines. We believe that a leggedrobot is well suited to the task of carefully rappel-ling down into a volcanic crater.
Mechanism, Electronics, and SensorsDante is an eight-legged robot designed for rappel-ling down the crater wall and carrying a payload of

5 of 12
scientific instruments into the volcano. In Figure 3,Dante is shown on level ground. The legs of theouter frame are raised. The eight lightly shadedboxes are the actuators for the vertical motion of thelegs. It is approximately 3m in length, 2m in width,
and 400kg in mass. It is composed of two frames,eight legs, two enclosures (one for electronics andone for the science payload) a tether reeling mecha-nism and a sensor mast.
The eight pantographic legs are arranged in twogroups of four on an inner and an outer frame. Asingle drive motor and drivetrain on each framedrives all four legs on that frame. Unique four-barlinkages on each leg mechanically convert a rota-tional motion into a stepping motion. (See Figure4.)The motion of the four-bar linkage and themotion of the foot, amplified in magnitude by thepantograph is shown in Figure 5. This mechanicalcoupling resulting from driving all four legs of aframe together reduces external force loops and
enables an intrinsic gait with only one motion. Towalk, four legs simultaneously lift and reach for-ward while the four supporting legs propel the body.To attain an overlap in the support phase duringwhich all legs are on the ground and to allowsmooth transition at the beginning and end of eachframe recovery, the motion control software drivesthe four-bar three times faster while the legs areunloaded and recovering forward through the air.
Dante’s frames can rotate with respect to each otherto change the walker’s heading. The maximum rota-tion per step is very small (about 3°) but can berepeated as needed. The approach is to avoid largeobstacles well in advance to minimize turing andthe lateral forces imposed by the tether.
In addition to the basic stepping motion enabled bythe four-bar, each of the legs can individually adjustits height, compounding the stepping motion, inorder to avoid obstacles in the terrain and adapt todiscontinuities. This is accomplished by a dedicatedlinear actuators on each leg. Each foot is fitted withcapaciflector proximity sensors, which use the dis-tortions in a flexible capacitive film to measure thedistance to nearby obstacles. In the sole are a con-tact switch and a load cell that are used to determinewhen the foot makes or breaks contact with theground and to measure the distribution of forceamong the feet. This group of sensors is sufficientto blindly grope for footfalls with no foreknowledge
Figure 3: Dante
-0.15 -0.1 -0.05 0.05 0.1 0.15
0.35
0.36
0.37
0.38
0.39
Lift
Advance
Figure 5: Motion of the foot mechanically generated by the four-bar linkage
Vertical
Circular MotionFour-bar
Pantograph
Foot
Lifting Motion
SteppingMotion
Linkage
Figure 4: Dante’s pantographic leg coupled to a vertical actuator tolift the feet and to a four-bar linkage for an intrinsicstepping motion.
Motion

6 of 12
of the terrain.
Dante has two perception sensors: a trinocular ste-reo jig and a scanning laser rangefinder. Refer toFigure 3 to see, at the top of Dante’s mast, the tele-operation camera on a pan-tilt platform, beneathwhich are the laser rangefinder and the transverse-mounted trinocular stereo jig. The scanning laserrangefinder senses terrain depth in a full circlearound Dante. In Figure 6 Dante’s front and rearlegs are visible and the dark region in the upper leftindicates there is nothing in front of Dante—it isstanding on the crater rim. The trinocular stereosystem has two triplets of cameras for looking for-ward and looking backward. Each set can capture atriplet of images. Data from these perception sen-sors can be processed to map the terrain aroundDante.
On steep slopes, Dante’s tensioned tether provides areactive force to gravity. The tether reel, mounted inDante’s midsection, has an integral tension measur-ing system and angle sensors to measure the direc-tion that the tether exits the robot. This knowledgeallows characterization of the forces and momentsbeing applied to Dante. The tensioned tether, inaddition to providing support with its Kevlar outerweave, delivers power through six thin conductorsin its inner weave. Communication to Dante isthrough a single fiber optic line located at the coreof the tether, over which seven video, one ethernetand two serial channels are multiplexed. Radiotelemetry, although expensive, is possible but thenecessity of a tether provided an available route forcommunication.
The fiber optic line in Dante’s tether is attached to a2km (nonload-bearing) extension to run from thevolcano’s rim directly to the mountainside controlstation. In the control station video, ethernet, and
Figure 6: Full 350° view of laser rangefinder data from Erebus crater rim
Crater Rim
Front Legs Rear Legs
Rock
serial signals are demultiplexed and sent to controlcomputers and monitors. Two Sun Sparcstations runthe perception, planning, simulation and user inter-face processes. From these workstations Dante’sactions are determined and sent to the on-boardphysical controller. These workstations and com-pressed video signals can be connected to a NASATDRSS ground station and sent live to GoddardSpace Flight Center (GSFC). Operators at GSFCare able to watch through Dante’s cameras and, byconnecting to the mountainside computers, cancommand the robot.
On either side of its midsection Dante has twoenclosures. Both are powered, sealed, heated andinternally ventilated. One enclosure contains elec-tronics and computing. In it a VME backplane (withdual CPU, motion control, and DAADIO boards),motor amplifiers and telemetry hardware, arehoused. The science payload is carried in the otherenclosure.
ScienceDante carries a science payload including a numberof physical sampling devices, some of which arepaired with on-board real-time devices that can col-lect continuous data while inside the volcano,something unavailable to date. Pristine gases areobtained by using a long hollow titanium probe thatis mounted on the front of the robot and can bepositioned with two degrees-of-freedom. The probeis plumbed to a variety of devices in the scienceenclosure. If close enough, the titanium probe candraw gas directly from an active fumarole or themagma lake. Gases drawn through the probe caneither be collected in evacuated bottles, analyzedwith a gas chromatograph, drawn through filters, oranalyzed with a quartz crystal microbalance.
The gas chromatograph (GC) can perform real-time

7 of 12
analysis of gas composition. Researchers receiveimmediate information about gas chemistry. By col-lecting samples at different locations, the GC canmap the change in chemistry over time and positionin the crater. The physical samples are redundantwith the GC but can also be analyzed in greaterdetail in the laboratory.
The filters are used to sample fine particulates(aerosols) suspended in the volcanic plume. At vari-ous points during the exploration of the crater, a fil-ter sample can be taken. In parallel with the filtersystem, the quartz crystal microbalance (QCM)measures total mass of airborne particulates. It con-sists of paired quartz plates, exposed to the atmo-sphere, that both resonate at the same frequencyuntil mass is collected; then the frequency of the topplate changes and the frequency difference is pro-portional to the collected mass. The QCM can mea-sure the change in aerosol content over time andposition during the course of the exploration.
A gamma ray spectrometer (GRS) is also includedin Dante’s science package. A GRS measures theradioactivity of materials. By recording and analyz-ing the gamma ray spectrum of a material, the quan-tity and type of the isotopes can be identified. TheGRS can measure the increasingly younger lavasthat would be encountered as the magma lake isapproached. On the crater floor, the GRS can beused to analyze sublimates that quickly drop out ofthe gases as they exit vents and hit the cold air.
On the pan-tilt platform atop its sensor mast, Dantecarries an infrared thermocouple, a device that canmeasure the temperature of bodies from a distanceby measuring the emitted infrared radiation. Theinfrared thermocouple can be pointed at the magmalake whenever possible in hopes of observing alarge gas bubble breaking the surface of the lakeand revealing the liquid magma just beneath.
Dante SoftwareThe design of the legged mechanism, complex ornot, can clearly be achieved. The slow, smoothmotion of legged devices is advantageous in roughterrain where caution (and, sometimes, sensing)limits the speed of wheeled and legged mechanismsalike. The significant remaining drawback to legshas been the difficulty in developing software tocontrol walking. For a slow-moving walker, thischallenge is not in moving the individual legs, asthis is directly analogous to well-understood manip-ulator control, but in the coordination of leg andbody motions. The legged robot, either with a real-time controller, low-level planner, or as an artifact
of its architecture, must generate a sequence of legand body motions, a gait, that will propel it alongsome path. We chose to control the gait with delib-erative planners and to enable Dante to sense itsenvironment so that the planners can autonomouslycontrol the robot’s action.
ArchitectureThe architecture of Dante’s software system reflectsa sense-plan-act cycle that enables Dante to walkand to operate autonomously. (See Figure 7.) Ter-
rain is sensed by both trinocular stereo and laserrangefinder perception. However, Dante can be tele-operated without its perception sensors and walkblindly by relying on human operators to direct itsactions. Each perception module transforms rawsensor data into a depth map. The terrain mapperthen transforms depth maps acquired in the coordi-nate system of a particular sensor into a commonelevation map. Extensive map merging is not per-formed because the gait planner periodicallyrequests maps in the current local coordinate systemand there will likely be a single most recent map.
The gait operator gives instructions to walk, roll,pitch, yaw and lift (and lower) the robot. Theseinstructions are in the form of desired trajectories tofollow. The gait planner takes these trajectories andbreaks them down: first it plans all the bodymotions required to follow the trajectory. Then, ifDante is operating autonomously, the body motionis adjusted to avoid collision with the terrain whilestill remaining as low as practical for stability. Next,the basic leg motions required to propel the bodyalong the trajectory are generated. If Dante is notwalking blindly, the leg motions are adjusted toclear obstacles during the recovery phase and toensure contact with the terrain during support
Trinocular
Laser
Terrain
StereoPerception
Perception
Mapper
Figure 7: Dante’s software architecture showing information flow
Gait
Gait
Gait Dante
Erebus
Planner Executor
Operator
ControlSystem
GraphicalSimulator
UserInterfaceDisplay
8 of 12
phase. This planning process, termed gait genera-tion, results in a plan to make Dante walk along thecommanded trajectory.
The gait plan is then passed to the gait executor. Theexecutor monitors current robot state and feeds thecommands to execute the gait plan to the Dantecontrol system. The gait executor monitors progresslooking for errors in the execution of the plan.When a substantial error occurs, the executor stopsexecution of the gait plan, determines the currentrobot state, and sends a message to the gait plannerto initiate generation of a new plan beginning fromthe current location.
The Dante control system, or controller, is a real-time process that runs on-board the robot. It coordi-nates the actuators and reads status from encodersand other sensors. The Erebus graphical simulatoracts as a virtual robot simulating all sensors includ-ing the laser rangefinder and all actuators. Its mes-sage interface is identical to that of the actualcontroller so plans generated by the gait planner canbe previewed on the simulator to observe their out-come. The simulator is invaluable to the develop-ment of other modules because they can be testedwithout needing, and before the completion, of theactual sensors or actuators.
The user interface display periodically polls thecontroller for status information about the robot. Itdisplays a 3D kinematic view of the robot withreadouts of all the actuators and sensors. The usercontrols Dante’s actions by giving commands thatgo to the gait operator.
In future implementations of the system, the gaitexecutor could be more capable of correcting minorproblems with the execution of gait plans ratherthan just detecting errors. Future development ofthis system would eliminate the gait operator pro-cess replacing it with a trajectory planner whichcould automatically perform the task of identifyingthe best route for the robot and breaking it into tra-jectories for the gait planner.
PerceptionTrinocular stereo perception uses a new sum of sumof squared differences (SSSD) algorithm that canquickly generate depth maps of the visible ter-rain.[3][4] Any stereo vision system operates on theprinciple that the known baseline between camerasand the relative position of a feature in each cameraimage can be used to calculate the distance to thefeature. Three cameras (trinocular) are usedbecause depth triangulation is more accurate withlonger baselines but feature correspondence is less
difficult with shorter baselines. The trinocular jigcombines both long and short baselines.
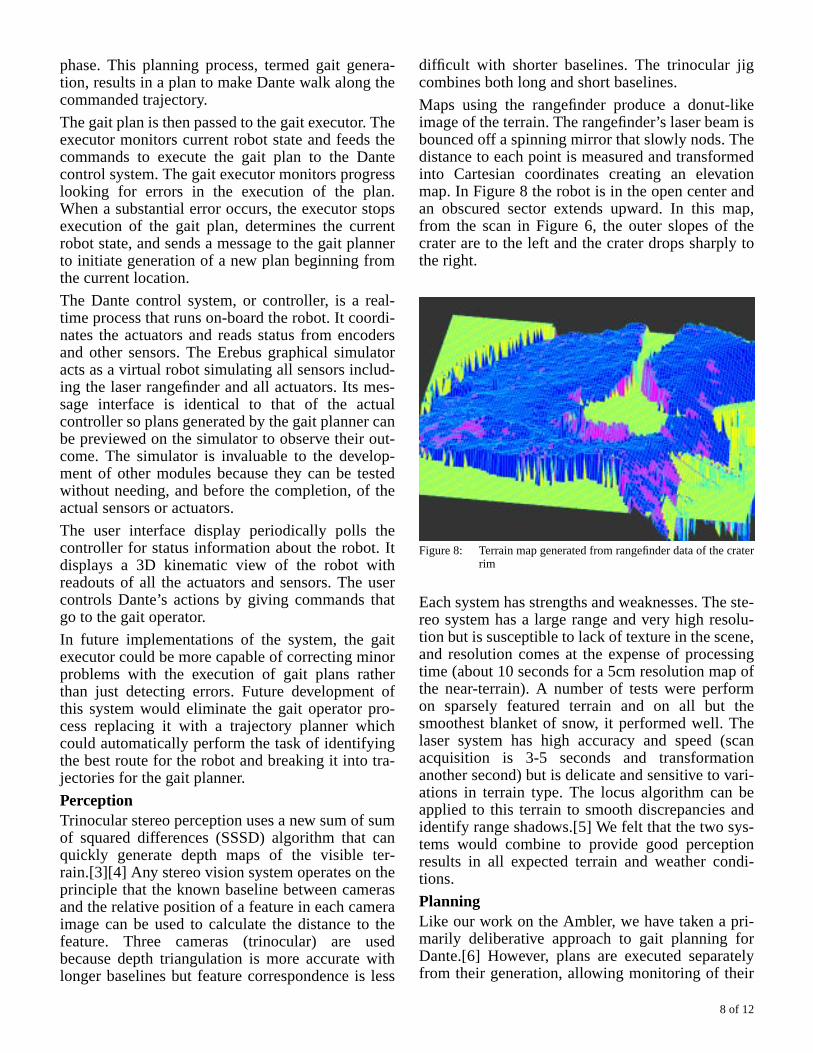
Maps using the rangefinder produce a donut-likeimage of the terrain. The rangefinder’s laser beam isbounced off a spinning mirror that slowly nods. Thedistance to each point is measured and transformedinto Cartesian coordinates creating an elevationmap. In Figure 8 the robot is in the open center andan obscured sector extends upward. In this map,from the scan in Figure 6, the outer slopes of thecrater are to the left and the crater drops sharply tothe right.
Each system has strengths and weaknesses. The ste-reo system has a large range and very high resolu-tion but is susceptible to lack of texture in the scene,and resolution comes at the expense of processingtime (about 10 seconds for a 5cm resolution map ofthe near-terrain). A number of tests were performon sparsely featured terrain and on all but thesmoothest blanket of snow, it performed well. Thelaser system has high accuracy and speed (scanacquisition is 3-5 seconds and transformationanother second) but is delicate and sensitive to vari-ations in terrain type. The locus algorithm can beapplied to this terrain to smooth discrepancies andidentify range shadows.[5] We felt that the two sys-tems would combine to provide good perceptionresults in all expected terrain and weather condi-tions.
PlanningLike our work on the Ambler, we have taken a pri-marily deliberative approach to gait planning forDante.[6] However, plans are executed separatelyfrom their generation, allowing monitoring of their
Figure 8: Terrain map generated from rangefinder data of the craterrim

9 of 12
progress. At this point, the monitor performs onlyerror detection not reactive error correction.
Dante’s gait generation software utilizes variousconstraints, such as kinematics, terrain, and stabil-ity, to constrain the range of possible moves. It thenorders the remaining moves so that search or opti-mization can be used to select the best gait toachieve the goal.
There are two basic problems with searching inconstraint space for an optimal gait. First, the spacegrows exponentially with the number of degrees-of-freedom in the robot and is more difficult to searchwith increasing numbers of constraints.[7] Thesearch space can be kept manageable by consider-ing only a small number of placements for each legand body move. Second, the horizon effect for lim-ited search implies that successfully finding a gaitto an intermediate goal is no guarantee of reachingthe ultimate goal. Unlike the Ambler, which canmove any leg at any time, Dante with two fixedframes of legs has a very limited set of possiblemoves. This greatly simplifies the planning problemreducing it primarily to one of optimizing stabilityand adaptation to the terrain.[8]
Terrain is used to constrain the motions of themechanism. As the body moves forward, lifting andlowering to maintain appropriate terrain stand-off,the leg extensions must adjust to avoid obstaclesand then to make contact with the ground at foot-fall. The gait planner interacts with the terrain map-per to learn about the terrain surrounding themechanism.
For stability, constraints of static stability, such theconservative support polygon, are not relevant sincethe mechanism is always statically stable.[9] Withrespect to dynamic stability measures, such as theenergy stability constraint, Dante is very stable onflat terrain.[10] In Figure 9 is a graph of Dante’snominal energy stability, the energy required to tip-over as a function of the position of center-of-grav-ity. On sloped terrain, proper control of tether ten-sion assures that Dante’s stability appears the sameto the gait planner. In fact, with proper tether con-trol increasing slope appears to the software systemas simply decreasing weight. The magnitude of theenergy required to tip over decreases linearly untilDante is on a vertical slope and the tipover energy iseverywhere zero. However, Dante remains stable,hanging on its tether.
ControlThe controller is divided between two real-timeprocessor boards on-board the robot. One processor
is for communication and the other is for servo con-trol. The communication processes receive motioncommands and send sensor information to othersoftware modules. The servo processes control themotions of the vertical actuators in feedback loopsand send signals to motion control board that con-trol the four-bar linkages.
The controller is designed to perform continuouswalking, so requests are received, processed andqueued concurrent with motion execution. The pro-cessing involves coordinating the transitionbetween support and recovery phases and settingspeeds so that legs arrive at the right place at theright time. As long as something is in the queueDante keeps walking. The controller also checks thehealth of all physical devices including itself. Itsends warning messages to the operator when prob-lems are detected and recovers from those errorsthat it can. The controller communicates with othersoftware modules using the TCX communicationssystem.[11]
CommunicationUsing TCX, a task communications package basedon experience with the Ambler’s Task ControlArchitecture (TCA), Dante has an integrated a soft-ware system that researchers can observe, instruct,and modify during operation.[12] Processes includ-ing perception, planning, and control communicatepoint-to-point via messages. TCX abstracts the cod-ing, transmission, and decoding of messages mak-ing inter-process communication look likeintraprocess procedure calls. TCX has greatlyreduced the time to integrate a software system and
-1
-0.5
0
0.5
1 -2
-1
0
1
2
0
0.2
0.4
0.6
-1
-0.5
0
0.5
1 -2
-1
0
1
2
0
0.2
.4
6
Figure 9: Dante’s energy stability as a function of center-of-forceposition; feet are at 1.75m from the longitudinal axis and1.5m from the lateral axis
Lateral Position (m)
Ene
rgy
(103 J
)
LongitudinalPosition (m)

10 of 12
allowed researchers to quickly add new moduleswhen necessary.
TestingDuring the last third of the project, after spendingthe first third designing and the second assembling,we began a testing program for Dante. First we per-formed a number of component tests including thelegs, feet, tether reel, electronics and fiber optictelemetry. In one tether test, we discovered whenthe tether was placed under tensile loads the internalfiber was so constricted that the signal was attenu-ated beyond reconstruction. This was unexpected asthe fiber was specified to function while supportingDante’s full weight. Time precluded manufacture ofa new tether so a second passively deployed com-munication fiber was added to the system.
Once fully assembled we undertook full systemtests. Indoor flat-terrain tests were performed toverify control software. Outdoors, at a local slagheap, we performed tests walking on rough ground.During one test, while attempting to transition ontoa slope, an extreme side-loading condition, fourlegs simultaneously broke. Ultrasonic inspectionrevealed that the welding in the legs, performed byan outside contractor, was substandard. The legswere subsequently repaired and reinforced.
We demonstrated fully-autonomous walking usingperception in natural terrain. Finally, we performeda number of teleoperated tests while walking undertether tension control, ascending and descendingartificial ramps and natural hillsides. The slopematerials included hard rock, soft sand, conglomer-ated gravel and loose blocks, which, in retrospect,are very good approximations of the terrain Danteencountered just beneath Erebus’ rim. Dante wasable to succeed in all these test environments. Hav-ing completed all the testing that our 10 monthtime-frame would allow and with a number of prob-lems revealed and corrected, the decision was madethat we proceed to Erebus.
Expedition to ErebusIn Pittsburgh, Dante was disassembled and packedalong with support equipment into crates and flownto New Zealand where we were waiting to travel onto Antarctica. On December 15, 1992 we arrived viaLC-130 airplane in McMurdo Station with allequipment intact.
The first week of the expedition was occupiedentirely by logistics. Upon arriving in McMurdo thegroup attended numerous orientations includingtopics of facilities, food, equipment, cargo, helicop-ters, safety. Everyone attended mandatory field
safety training to learn everything from glaciertravel to snow shelters and cooking stoves to Skidoodriving. During this period we repacked all ourcargo into loads suitable for helicopter transport toMount Erebus. This year McMurdo linked to theInternet via satellite so we were able to communi-cate directly, though intermittently, to CarnegieMellon. With the cargo and people ready to go weencountered our first weather delay—helicopterswere unable reach the acclimatization camp on theFang Glacier because of cloud cover.
Two days later, on December 21, everyone in theparty was flown into the Fang Glacier camp foracclimatization to altitude. No one in our party feltmore than mild headaches and nausea and after twonights, we helicoptered to the Erebus Camp. Thecargo began to arrive immediately. The first taskwas to assemble Geryon, Dante’s transport cart.Dante, which is dimensioned to just fit inside theUH-1N helicopter, was then unloaded onto Geryon.We set up the mountainside control station inside anexisting hut. Computer, video monitors, TDRSScommunications electronics, an INMARSAT sta-tion, and Dante were moved inside and assembledinto robot and control station. We tested individualcomponents again and then took Dante for a walkoutside the control station to see that the mecha-nism and electronics still worked. We collected datawith the stereo and rangefinder and with correct fil-tering both systems produced high quality maps.We performed a cold-boot test overnight, shuttingDante down and allowing it to reach the ambienttemperature before starting its automatic warm-upand boot cycle. After Dante had booted, we experi-enced our first Antarctic storm and hurried to putDante back inside to do the final sealing and sciencepayload preparations. We also discovered a newproblem with the tether level-wind mechanismwhich lays the tether uniformly on the reel. Itappeared that the cold temperature caused it to bindup. An additional heating unit was installed.
On December 28, we began transporting Dante tothe rim of the outer crater. We started by pullingGeryon, loaded with Dante and generators, by ateam of Skidoos across the first kilometer of snowfields and shallow valleys. When the grade becameso steep that we could no longer Skidoo, we setanchors to which we attached Geryon’s winchcable. On this day the first of many TDRSS eventsoccurred and we broadcast video about Erebus andthe progress to date. After two more days of winch-ing and another storm interruption Dante arrivedsafely at the rim. The 2km fiber optic line extension

11 of 12
was run back to the control station and Dante wasbooted and operational. December 31 brought twoexciting events. First a runaway Skidoo with frozenthrottle went careening off towards the TDRSSdish. Although it had driven across a fiber opticline, there was no damage. On the rim, Dantewalked off Geryon and into launch position. Butthen the volcano experienced a minor eruption.With a low roar, Erebus began tossing lava bombsfrom the magma lake into the outer crater. Althoughonly “Pele’s Hair”, fine glass strands, reached therim, a dense plume curtailed work for the rest of theday.
On January 1, the sensor mast was reinstalled andthe science payload activated. The level wind mech-anism which was still not functioning properly, wasremoved meaning that the tether would not be laidevenly into the reel. Although a risk, it was felt thatthe natural slewing of the body with the terrainwould be sufficient to distribute the tether and thatthe large reel could function without a uniformwrap. It is interesting to note that the problem withthe level wind was later identified as a loose acmescrew, not temperature as was believed at thetime—both could have caused it to “freeze”. Duringthe rim checkout Dante was teleoperated from God-dard. The on-board controller executed commandsfrom Goddard operators to point, focus and zoomDante’s teleoperation cameras. The launch platformwith Dante in place was then tipped over the edgeof the crater. A new problem, this one with the bal-ance of the teleoperation camera was discovered.Apparently the panning actuator could not swingthe heavy eccentric load of the sealed camera. Thiswas corrected by adding a counterbalancing weight,a carabiner. Dante was launched and the descentbegan with Dante rappelling 6.5m to about 10mbelow the rim. (See Figure 10.)
On January 2, digital communication to Dante waslost and the video signal greatly degraded. We dis-covered that the passively-deployed fiber optic line,which had stiffened in the cold, was tangling as itunspooled. We went to the rim and cleared the tan-gles, restoring the digital communication, but foundthat as the robot proceeded more tangles wouldoccur. The decision was made to try to unspool thefiber at the current position and feed it down fromthe rim rather than risk more problems once Dantewas out of reach. During this operation a number oftwists and bends were corrected. Eventually, a sharpbend unspooled, twisted and severed the fiber. Hopeof repairing a single-mode fiber under existing con-ditions was non-existent so the mission was stopped
at that point. We held a live news conference overthe TDRSS link and explained what had happened.We had great success but were stopped short of thecrater floor.
The next few days were spent dragging Dante backto the rim with Geryon’s winch, loading the cart andwinching everything back to the hut for disassem-bly and repacking. Equipment and people wereshipped back to McMurdo Station where we pre-pared equipment for sea transport and waited forplanes back home.
SummaryWhat went right:
• Created and partially demonstrated a crediblerobot and exploration mission
• Successfully tested remote-controlled robot inharsh climate
• Walked with intrinsic gait• The robot scale and capabilities were correct for
the terrain• The software architecture was flexible and
robust• Sealed computers, electronics and telemetry
worked• Satellite system and TCX enabled live remote
video and teleoperationWhat went wrong:
• Didn’t reach the bottom of the crater.• Moreover, didn’t descend far enough to collect
any gas samples.• Dante didn’t walk as fast or as rigidly as
Figure 10: Dante on Mount Erebus’ outer crater wall
12 of 12
intended• Sensors including the tension sensor and incli-
nometers required frequent recalibration• As many contingencies as were covered, we
didn’t test enough get everything right so somecomponents, like the level wind, caused prob-lems and others, like the fiber, just broke.
The Dante project demonstrated further develop-ment in mobile robotics, showed the potential ofexploratory robots in the future and, because of theclose analogy to the Antarctic environment, discov-ered important challenges in future planetary explo-ration.
Dante provides fundamental insights into thedesign, construction and control of environmentallysurvivable, capable systems. Novel designs sim-plify mechanical systems and provide viable solu-tions to exploration in extremely rugged terrain.The perception component of our research advancesthe state-of-art in mapping rugged terrain coveredwith difficult materials like ice and snow. Theapproaches used for modeling the sparsely-featuredterrain and objects encountered in the Mount Ere-bus mission are applicable to a wide range of navi-gation and manipulation tasks. The problems ofsystems integration, systems architecture, and coor-dination of multiple, interacting software compo-nents are faced by every robotics program. Inparticular, issues of extended autonomy, long-dis-tance and long-delay telemetry, and high-reliabilitysoftware must necessarily be addressed to deployrobots in Antarctica.
This program is applying advanced robotics tech-nologies, research robots and expertise developedand validated in the laboratory that are essential forfuture missions in space and on Earth.
AcknowledgmentThe development of Dante was supported by theNational Aeronautics and Space Administrationunder grant NAGW-1175. The expedition to MountErebus was supported in part by the National Sci-ence Foundation under grant DPP-9118056 forAntarctic science project S-081. We would like tothank the pilots and crew of the U.S. Navy VXE-6for helicopter support.
This paper will appear in a special issue of Roboticsand Autonomous Systems under the title “Explor-ing Mount Erebus by Walking Robot.”
References[1] G. Zreda-Gostynska, P. Kyle, D. Finnegan,
Chlorine, Fluorine, and Sulfur Emissions from
Mount Erebus, Antarctica and Estimated Con-tributions to the Antarctic Atmosphere, submit-ted to Geophysical Research Letters (1993).
[2] J. Bares, Configuration of Autonomous Walk-ers for Extreme Terrain, Ph.D. Dissertation inCivil Engineering, Carnegie Mellon University,May 1991.
[3] M. Okutomi, T. Kanade, A Multiple-BaselineStereo, Proceedings of IEEE Conference onComputer Vision and Pattern Recognition,1991.
[4] B. Ross, A Practical Stereo Vision System, Pro-ceedings of IEEE Conference on ComputerVision and Pattern Recognition, 1993.
[5] I. Kweon, T. Kanade, High Resolution TerrainMaps from Multiple Sensor Data, IEEE Inter-national Workshop on Intelligent Robots anSystems, July 1990.
[6] D. Wettergreen, C. Thorpe, Gait Generation forLegged Robots, IEEE International Conferenceon Intelligent Robots and Systems, July 1992.
[7] J-C. Latombe, Robot Motion Planning, KluwerAcademic,1991
[8] J. Bares, W. Whittaker, Walking Robot with aCirculating Gait, IEEE International Workshopon Intelligent Robots an Systems, July 1990.
[9] S. Mahalingam, W. Whittaker, Terrain Adap-tive Gaits For Walkers with Completely Over-lapping Work Spaces, Robots 13, May, 1989,pp.1-14.
[10] D. Mesurri, C. Klein, Automatic body Regula-tion for Maintaining Stability of a Legged Vehi-cle During Rough-Terrain Locomotion, IEEEJournal of Robotics and Automation, Vol. RA-1, No. 3, September, 1985, pp.132-141.
[11] D. Christian, Dante Controller, Robotics Insti-tute Technical Report, Carnegie Mellon Uni-versity, 1993.
[12] C. Fedor, TCX Reference Manual, RoboticsInstitute Technical Report, Carnegie MellonUniversity, 1993.





























