Embed Size (px)
Citation preview
UNIVERSITE KASDI MERBAH OUARGLA Faculté des Sciences Appliquées Département de Génie Electrique
Mémoire MASTER ACADEMIQUE
Domaine : Sciences et technologies Filière : Electrotechnique
Spécialité : Machines électriques et électronique de puissance Présenté par :
MESSAID Mohamed Laid BENLAHRACH Mohamed Ali Thème:
Soutenu publiquement Le :02 /06/2016 Devant le jury :
Année universitaire 2015/2016
Mr BENBOUZA Naima MA (A) Président UKM Ouargla
Mr REZOUG Mohamed Reda MA (A) Encadreur/rapporteur UKM Ouargla
Mr DJAFOUR Ahmed MC (A) Examinateur UKM Ouargla
Etude et réalisation d'un dispositif de poursuite
Pour panneau photovoltaïque
Remerciements
Nous remercions Dieu tout puissant de nous avoir accordée la force et le courage afin
de pouvoir accomplir ce travail.
Nous remercions spécialement Mr Rezoug Mohamed Reda pour sa disponibilité à
toute épreuve, pour sa gentillesse et sa patience, pour ses orientations et ses remarques
fructueuse, Tous nos respects et notre gratitude, merci.
Merci à l’ensemble de nos enseignants.
Merci à tous qui on contribué de prés ou de loin à la réalisation de ce travail.
Sommaire
Sommaire Introduction générale
1 Généralités 01 2 Position du problème 01 3 Objectif du projet 02 4 Présentation du mémoire 02
Chapitre I L’effet photovoltaïque
I.1 Introduction 03 I.2 Histoire de l’effet photovoltaïque 03 I.3 Energie photovoltaïque 03 I.3.1 Effet photovoltaïque 04 I.3.2 Les semi-conducteurs 05 I.4 Les Modules photovoltaïques 05 I.4.1 Le module cristallin 06 I.4.2 Le module couche mince 06 I.5 Principe de fonctionnement d’une cellule photovoltaïque 06 I.6 Rendement d'une cellule solaire 07 I.7 Modèle électrique 08 I.7.1 Caractéristique I= f (V) d'une cellule photovoltaïque 10 I.7.2 Modules photovoltaïques 10 I.7.2.1 Module et groupement de cellules en série 11 I.7.2.2 Groupement de cellules ou modules en parallèle 12 I.7.3 Caractéristiques énergétiques d’une cellule PV 13 I.7.4 Les caractéristiques électriques d’une cellule PV 13 I.7.4.1 La courbe courant tension d’une cellule PV 13 I.7.4.2 La tension de circuit ouvert Vco (pour Ico = 0) 14 I.7.4.3 Le courant de court- circuit Icc (pour Vcc = 0) 14 I.7.4.4 La puissance électrique d’une cellule PV 15 I.8 Les paramètres qui influent sur la caractéristique courant-tension 16 I.8.1 Influence de l'éclairement 16 I.8.2 Effet de la température sur la cellule photovoltaïque 16 I.8.3 Influence de la résistance série 17 I.8.4 Influence de la résistance shunt 18 I.8.5 Influence des mouvements terrestres sur la production photovoltaïque 18 I.9 Conclusion 19
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
II.1 Introduction 20 II.2 Les différentes méthodes d’amélioration du rendement d’un panneau photovoltaïque 20 II.2.1 Les régulateurs à recherche du point de puissance maximale 20 II.2.2 Techniques d’optimisation par orientations 21 II.3 Les techniques de poursuite 22 II.4 Rayonnement dans le plan capteur 22 II.4.1 Orientation – Inclinaison 23 II.4.2 Rayonnement sur un plan incliné 23 II.5 Influence énergétique de la déviation solaire 24
Sommaire
II.6 Schéma de principe 24 II.6.1 Capteur LDR 25 II.6.1.1 Principe de fonctionnement 25 II.6.2 Circuit de commande par Le microcontrôleur ATMEL 26 II.6.2.1 Le choix de la carte Arduino 26 II.6.2.2 Pourquoi Arduino Mega 28 II.6.2.3 La constitution de la carte Arduino Mega 28 II.6.2.4 Architecture interne 28 II.6.2.5 La réalisation virtuelle « PORTEUS » 30 II.7 Structure générale de la conception 34 II.8 Système mécanique d’orientation 35 II.9 Conclusion 36
Chapitre III Développement software et essais expérimentaux
III.1 Introduction 37 III.2 Les types de programmation 37 III.2.1 Présentation de l’organigramme IDE 37 III.2.1.1 Organigramme Arduino Mega 37 III.2.1.2 Présentation du programme IDE 42 III.2.1.3 Explication du programme 45 III.2.2 l'interface LABVIEW 47 III.3 Essai expérimental 48 III.4 Conclusion 49
Conclusion générale 1 Généralités 50 2 Problèmes rencontrés 50 3 Perspectives du projet 50 Bibliographie 51
Liste des figures
Chapitre I L’effet photovoltaïque
Figure I.1 Vue interne d’une cellule solaire éclairée 04 Figure I.2 Cellule photovoltaïque 07 Figure 1.4 Circuit équivalent d'une cellule photovoltaïque 09 Figure I.5 Caractéristique I= f (V) d'une cellule photovoltaïque 10 Figure I.6 Mise en série des cellules 11 Figure I.7 Mise en parallèle des cellules 12 Figure I.8 Caractéristiques I = f (V) d’une cellule PV au silicium 14 Figure I.9 Courant généré par une cellule PV en fonction de la tension aux bornes de
la cellule PV
15
Figure I.10 Effet de la température sur la cellule photovoltaïque 17 Figure 1.11 Les deux angles localisant le soleil 18
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
Figure II.01 Suiveur mécanique du soleil 22 Figure II.02 Orientation standard Figure II.03 Principe de poursuite globale Figure II.04 Capteur LDR Figure II.05 Constitution de la carte Arduino Mega Figure II.06 Architecture interne de la carte Arduino Mega
23 25 25 28 29
Figure II.07 le dispositif réalisé sous ISIS-PORTEUS 30 Figure II.08 Les capteurs de position Figure II.09 Arduino Mega sous ISIS PORTEUS Figure II.10 Circuit driver Figure II.11 Les actions externes manuelles Figure II.12 Les différent capteurs Figure II.13 Le chemin du fichier de code HEX de notre programme
31 31 32 32 33 33
Figure II.14 Photo de notre réalisation « module fixe et orienté » Figure II.15 Le système mécanique réalisé Figure II.16 La conception mécanique de notre système de poursuite sous SOLIDWORKS
34 35 35
Chapitre III Développement software et essais expérimentaux
Figure III.01 Organigramme principal Figure III.02 L'organigramme A « lever de soleil »
38 39
Figure III.03 Organigramme B l'axe horizontal X 40 Figure III.04 Organigramme C l'axe verticale Y FigureIII.05 Organigramme D coucher du soleil Figure III.06 Présentation graphique du programme Figure III.07 L’interface graphique LABVIEW de notre application Figure III.08 Courbes courant-temps pour un module fixe et un module orienté Figure III.09 Courbes tension-temps pour un module fixe et un module orienté Figure III.10 Courbes puissance-temps pour un module fixe et un module orienté
41 42 45 47 48 49 49
Liste des figures
48
20 20 20 21 22 22 23 23 24 24 25 25 26 26 28 28 28 30 34 35 36
III.1 Introduction 37 III.2 Les types de programmation 37 III.2.1 Présentation de l’organigramme IDE 37 III.2.1.1 Organigramme Arduino Mega 37 III.2.1.2 Présentation du programme IDE 42 III.2.1.3 Explication du programme 45 III.2.2 l'interface LABVIEW 47 III.3 Essai expérimental 48 III.4 Conclusion 49
Conclusion générale 1 Généralités 50 2 Problèmes rencontrés 50 3 Perspectives du projet 50 Bibliographie 51

Liste des figures
Liste des symboles
Voc : tension à vide (V)
Isc : courant de court circuit (A)
Vop : tension optimaux
Iop : courant optimaux
I : Courant débité par le panneau (A)
Iph : Photo courant (A)
IS, IS’ : Courants de saturation des diodes en inverse (A)
K : Constante de Boltzmann
RPc : Résistance en parallèle de la cellule photovoltaïque (Ω)
T : Température d’une cellule (°K)
KT : coefficient de température (°C)
q : Charge de l'électron
RSc : Résistance en série de la cellule photovoltaïque (Ω)
Rsh : Résistance shunt (Ω)
α : Facteur d'idéalité de la diode D
ns : Nombre de modules dans le panneau en série
np : Nombre de modules dans le panneau en paralléle
Vco : tension ouvert (V)
Ico : courant ouvert (A)
Icc : le courant de court-circuit (A)
G : L'éclairement de référence (1000 W/m2)
E : Eclairement ( W/m2)
Pmax : la puissance maximale PV (W)
Imax : Courant qui correspond à la puissance maximale (A)
Vmax : Tension qui correspond à la puissance maximale (V)
δ : Angle de déclinaison (Hauteur ou altitude) ( Degré )
α : Angle horaire (azimut) ( Degré )
Introduction Générale
1 Généralités Les énergies renouvelables sont des énergies qui se renouvèlent assez rapidement pour être
considérées comme inépuisable à l’échelle humaine du temps : face aux prévisions d’épuisement
inévitable des ressources mondiales en énergie fossile (pétrole, gaz, charbon...), en énergie
d’origine thermonucléaire (uranium, plutonium...), face aux multiples crises pétrolières,
économiques, aux changements climatiques dus à l’effet de serre. La science s’est tout
naturellement intéressée aux ressources dites " renouvelables " et notamment vers la plus
ancienne, le soleil, qui déverse chaque jour l’équivalent de 100 000 milliards de TEP (tonnes
équivalent pétrole). Cette valeur est à comparer aux 9,58 milliards de TEP que représente la
consommation annuelle mondiale en énergie primaire (1998).
Considérée dans l’Antiquité comme un dieu, le soleil est aujourd’hui réduit au statut
d’énergie, une énergie qu’il faut capter, la transformer, la stocker.... Capter cette énergie et la
transformer directement en électricité par effet photovoltaïque, provient de la conversion de la
lumière du soleil en électricité au sein de matériaux semi-conducteurs comme le silicium ou ceux
qui sont recouverts d’une mince couche métallique. Ces matériaux photosensibles ont la propriété
de libérer leurs électrons sous l’influence d’une énergie extérieure. C’est l’effet photovoltaïque.
L’énergie est apportée par les photons, (composants de la lumière) qui heurtent les
électrons et les libèrent, induisant un courant électrique. Ce courant continu de micro puissance
calculé en watt crête (Wc) peut être transformé en courant alternatif.
2 Position du problème
Malgré la propreté et la durabilité de cette ressource naturelle d’énergie, elle présente
toujours l’inconvénient du mauvais rendement (moins de 20% dans les meilleures conditions).
Pour cette raison, des systèmes d’optimisation énergétiques ont été conçus autour du monde. En
outre, la présence quantitative de cette énergie est fortement liée à la position du soleil pendant
journée et pendant la même l’année aussi. Cela est lié à l’abondance du rayonnement solaire reçu
par le générateur photovoltaïque.
Pour essayer de soulever ce problème, nous avons engagé à ce projet expérimental destiné à
réaliser un système de poursuite mécanique des angles solaires pour l’optimisation énergétique.
La plateforme numérique responsable à l’exécution de l’algorithme de poursuite est partagée
entre l’ordinateur et une carte ARDUINO.
- 1 -
Introduction Générale
3 Objectif du projet Dans ce projet trois objectifs ont été visés :
• Le premier est de regrouper suffisamment d’informations sur les énergies renouvelables
spécialement l’énergie solaire : construction interne, principe de fonctionnement,
influences sur le rendement du panneau solaire....
• Le deuxième consiste à réaliser un dispositif basé sur une carte nommée ARDUINO
capable d’exécuter une action de correction vers des actionnaires afin de corriger l’écart
du mouvement en expliquant les différents étages liés à la construction du dispositif.
• Le troisième est de réaliser et programmer sous l’environnement du C de ARDUINO et
réaliser une application sous LABVIEW afin de tracer les valeurs de mesure pour valider
les résultas pratiques.
4 Présentation du mémoire
Pour le développement de ce projet, nous avons réparti le travail sur trois chapitres.
Le premier présente une étude descriptive sur l’énergie photovoltaïque ainsi que sa
modélisation mathématique et le dimensionnement de ses composants.
Le deuxième chapitre est destiné à faire une synthèse des techniques d’optimisation
énergétiques existantes et de les classer entre-elles selon des critères d’application et selon les
manières d’exploitation puis on mettra la lumière sur l’étude et la réalisation du dispositif
expérimental ainsi que la description de chaque bloc du circuit, Ce chapitre terminera avec le
module de base qui est (ARDUINO MEGA) ; sa construction, son environnement de
programmation et son principe de fonctionnement afin de simplifier son utilisation.
Dans le troisième chapitre, nous allons procéder à la phase logarithmique en expliquant le
fonctionnement de notre programme, son déclenchement après le chargement du code simulé
dans la carte ARDUINO et de réaliser une application capable de tracer les différentes variables
tel que (I, V, T, E).
Enfin, on terminera avec une conclusion générale qui résumera l’intérêt de notre étude : les
différents résultats obtenus expérimentalement seront donnés sur annexe ( ) sous forme de photos
donnant ainsi un aperçu sur les performances des cartes d’interfaçage, et une idée sur les
problèmes à résoudre ultérieurement.
- 2 -
Chapitre I
L’effet photovoltaïque
Chapitre I L’effet photovoltaïque
I.1 Introduction
Le développement de l’exploitation des énergies renouvelables a connu une forte
croissance cette dernière décennie. La production d’électricité par des sources d’énergie globale
renouvelables offre une plus grande durabilité d’approvisionnement des consommateurs tout en
respectant les normes écologiques de l’énergie. Cependant, la renouvelabilité de ces ressources
dépend de la forme d’énergie elle-même (éolienne, solaire, …etc) dont les périodes de
disponibilité varie selon certaines conditions environnementales. En outre, leur rendement est
souvent très limité (cas du photovoltaïque).
Dans ce chapitre, nous allons présenter une synthèse sur l’énergie photovoltaïque, son
principe et ses procédés d’exploitation.
I.2 Histoire de l’effet photovoltaïque
La conversion de la lumière en électricité appelée effet photovoltaïque, a été découverte par
le physicien français A. BECQUEREL en 1839, mais il faudra attendre près d'un siècle pour que
les scientifiques approfondissent et exploitent ce phénomène de la physique. L'utilisation des
cellules solaires débute dans les années quarante dans le domaine spatial, les recherches d'après
guerre ont permis d'améliorer leurs performances et leur taille, mais il faudra attendre la crise
énergétique des années soixante-dix pour que les gouvernements et les industriels investissent
dans la technologie photovoltaïque et ses applications terrestres.
La technologie photovoltaïque est en plein essor aux quatre coins du monde ; de
nombreuses possibilités d'exploitation sont étudiées puis expérimentées dans l'espoir d'une
commercialisation future. Toutefois, les prévisions de baisse des prix des modules
photovoltaïques ont été trop optimistes et l'industrie photovoltaïque se trouve dans une situation
difficile. En effet, la complexité des procédés de fabrication des modules photovoltaïques et les
rendements de production trop faibles, entraînent des coûts élevés qui freinent le volume des
ventes. On peut espérer que dans les années à venir, la technologie photovoltaïque arrive à
« maturité » (procédés simplifiés, meilleurs rendements de production), et qu'alors l'augmentation
du volume de production réduise le coût des modules. [2]
I.3 Energie photovoltaïque
Un système photovoltaïque (PV) est destiné à satisfaire un besoin d’énergie électrique selon
des conditions spécifiques d’exploitation. Il est généralement constitué d’un générateur
photovoltaïque, d’un système de stockage, de source auxiliaire d’appoint (groupe diesel,
- 3 -
Chapitre I L’effet photovoltaïque
aérogénérateur, réseau, etc.….), des systèmes d’interface (convertisseurs, réseau, etc..) et d’un
système de contrôle-commande (système de surveillance, armoires électriques, cartes
électroniques...etc). Son usage en éclairage, réfrigération, pompage et communication est exploité
dans divers secteurs tels que la santé, l’éducation, l’agriculture, énergie de secours.
La topologie d’un système PV est déterminée selon la nature de l’utilisation (nombre de
récepteurs, contrainte d’exploitation, sécurité énergétique,..) et des considérations technico-
économiques prenant en compte aussi bien le rendement énergétique que la taille de
l’investissement.
La partie principale dans ces installations est le générateur photovoltaïque. Il est composé
de divers modules formés par une association série/ parallèles de cellules élémentaires
convertissant l’énergie solaire sous forme de rayonnement en une énergie électrique. Une cellule
peut produire 1.5w pour un ensoleillement de 100W/m2 avec une tension de 0.6V à vide. Un
module de 36 cellules produit une puissance moyenne de 40 à 50W et occupe une surface de
0.5m2 environ. Le rendement énergétique moyen est de l’ordre de 12 à 15% dans les enceintes de
recherche. La durée de vie d’un tel générateur est estimée à plus de 20 ans. [ER2009]
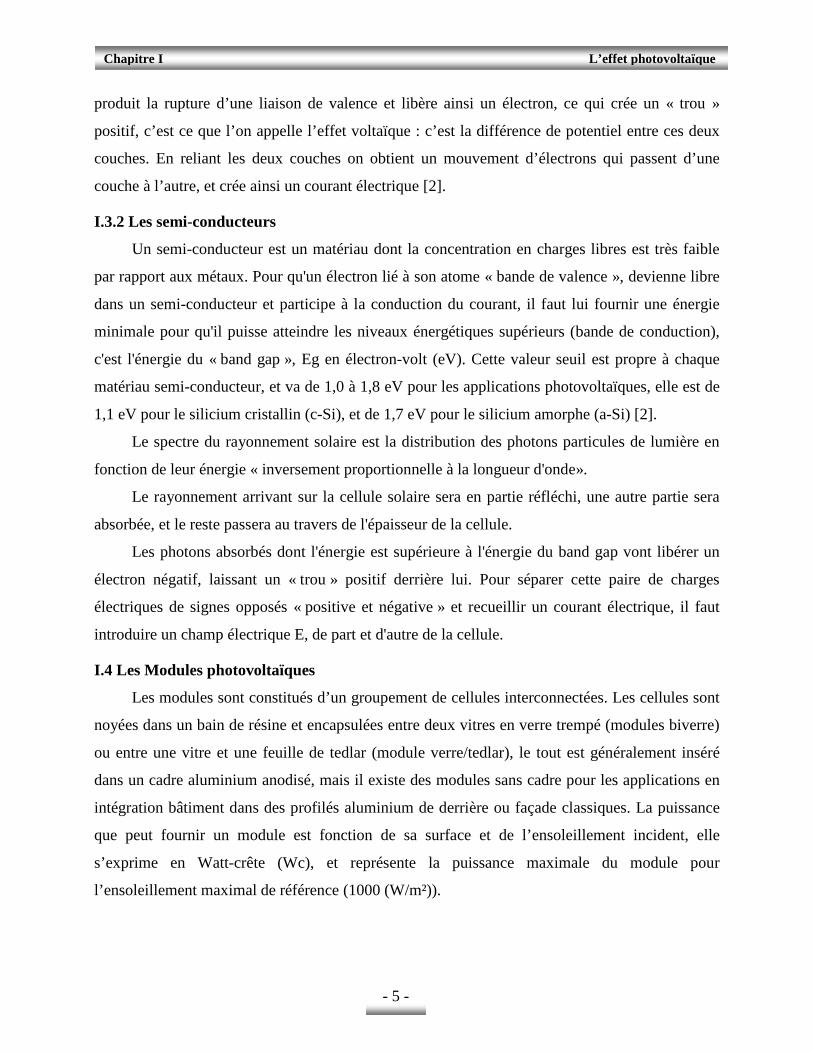
I.3.1 Effet photovoltaïque
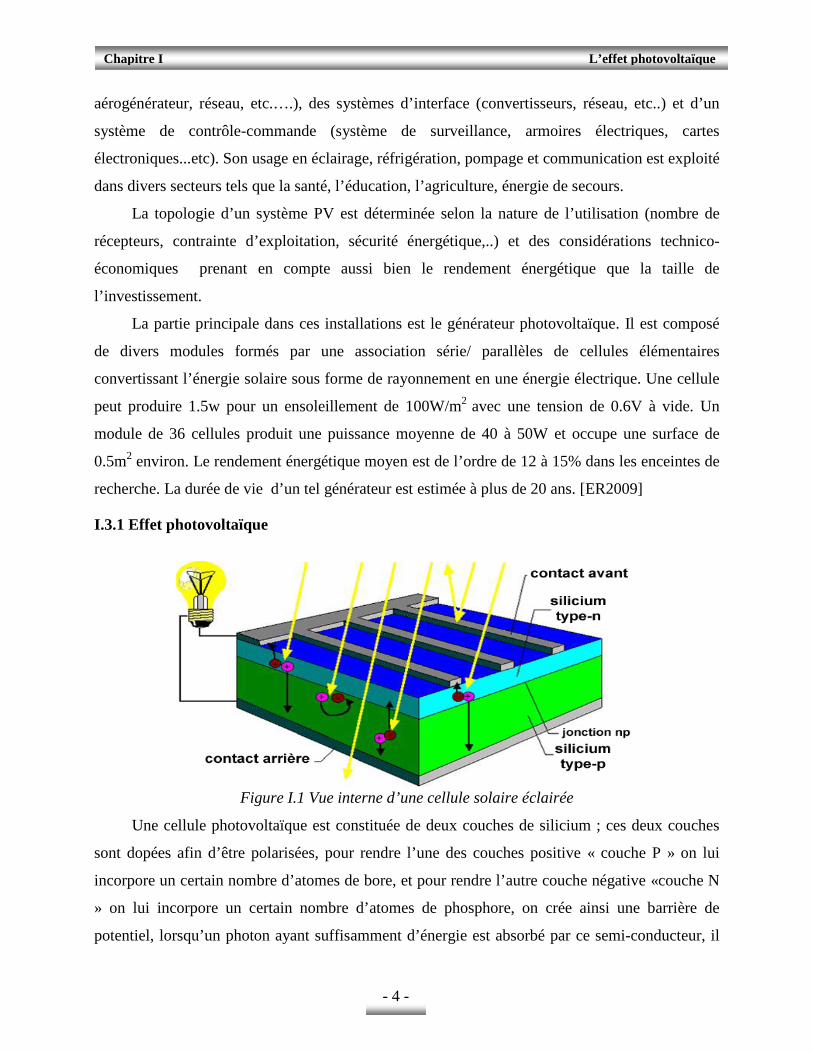
Figure I.1 Vue interne d’une cellule solaire éclairée
Une cellule photovoltaïque est constituée de deux couches de silicium ; ces deux couches
sont dopées afin d’être polarisées, pour rendre l’une des couches positive « couche P » on lui
incorpore un certain nombre d’atomes de bore, et pour rendre l’autre couche négative «couche N
» on lui incorpore un certain nombre d’atomes de phosphore, on crée ainsi une barrière de
potentiel, lorsqu’un photon ayant suffisamment d’énergie est absorbé par ce semi-conducteur, il
- 4 -
Chapitre I L’effet photovoltaïque
produit la rupture d’une liaison de valence et libère ainsi un électron, ce qui crée un « trou »
positif, c’est ce que l’on appelle l’effet voltaïque : c’est la différence de potentiel entre ces deux
couches. En reliant les deux couches on obtient un mouvement d’électrons qui passent d’une
couche à l’autre, et crée ainsi un courant électrique [2].
I.3.2 Les semi-conducteurs
Un semi-conducteur est un matériau dont la concentration en charges libres est très faible
par rapport aux métaux. Pour qu'un électron lié à son atome « bande de valence », devienne libre
dans un semi-conducteur et participe à la conduction du courant, il faut lui fournir une énergie
minimale pour qu'il puisse atteindre les niveaux énergétiques supérieurs (bande de conduction),
c'est l'énergie du « band gap », Eg en électron-volt (eV). Cette valeur seuil est propre à chaque
matériau semi-conducteur, et va de 1,0 à 1,8 eV pour les applications photovoltaïques, elle est de
1,1 eV pour le silicium cristallin (c-Si), et de 1,7 eV pour le silicium amorphe (a-Si) [2].
Le spectre du rayonnement solaire est la distribution des photons particules de lumière en
fonction de leur énergie « inversement proportionnelle à la longueur d'onde».
Le rayonnement arrivant sur la cellule solaire sera en partie réfléchi, une autre partie sera
absorbée, et le reste passera au travers de l'épaisseur de la cellule.
Les photons absorbés dont l'énergie est supérieure à l'énergie du band gap vont libérer un
électron négatif, laissant un « trou » positif derrière lui. Pour séparer cette paire de charges
électriques de signes opposés « positive et négative » et recueillir un courant électrique, il faut
introduire un champ électrique E, de part et d'autre de la cellule.
I.4 Les Modules photovoltaïques
Les modules sont constitués d’un groupement de cellules interconnectées. Les cellules sont
noyées dans un bain de résine et encapsulées entre deux vitres en verre trempé (modules biverre)
ou entre une vitre et une feuille de tedlar (module verre/tedlar), le tout est généralement inséré
dans un cadre aluminium anodisé, mais il existe des modules sans cadre pour les applications en
intégration bâtiment dans des profilés aluminium de derrière ou façade classiques. La puissance
que peut fournir un module est fonction de sa surface et de l’ensoleillement incident, elle
s’exprime en Watt-crête (Wc), et représente la puissance maximale du module pour
l’ensoleillement maximal de référence (1000 (W/m²)).
- 5 -
Chapitre I L’effet photovoltaïque
La tension délivrée par un module dépend du nombre de cellules connectées en séries. Pour
les modules de petite puissance (< 75 Wc), la tension d’usage est généralement comprise entre 12
et 15 Volts, des modules de puissance plus importante sont obtenus par une augmentation du
nombre de cellules en série « augmentation de la tension », et augmentation du nombre de
branches de cellules en parallèle « augmentation de la valeur du courant ». La tension d’usage
peut alors être de 24 Volts ou plus selon la configuration du système à alimenter, la surface des
modules est variable selon les fabricants, et est généralement comprise entre 0,5 et 1 m ; elle peut
atteindre 3 m pour des fabrications spéciales et si l’importance de la commande le permet.
Plusieurs modules interconnectés constitueront un panneau, plusieurs panneaux interconnectés
constitueront un champ photovoltaïque, l’assemblage des modules en série et/ou en parallèle
permettra de fixer différentes tensions et puissances [2].
I.4.1 Le module cristallin
Un module de 12 Volts nominal est composé par la mise en série de 36 cellules cristallines;
ces cellules sont protégées par une enveloppe supérieure et inférieure. Il existe différents types
d'encapsulation :
• Verre / verre (ou bi-verre) ;
• Verre / matériau composite (tedlar / milar).
L'ensemble cellule + encapsulant forme un laminât. Le rajout d'un cadre métallique (aluminium)
procure au laminât sa rigidité et permet sa fixation [2].
I.4.2 Le module couche mince
Dans le cas de la technologie couche mince, le module est constitué d'un assemblage de 4
cellules élémentaires, chacune délivrant une tension nominale de 12V. En fonction du câblage
série ou parallèle de ces 4 sous-ensembles, on obtient des modules couche mince en 12 et 48
Volts nominal [2]. La caractéristique Courant Tension d'un module couche mince est plus
infléchie. L'influence de la température sur les performances est moindre que pour la technologie
cristalline.
I.5 Principe de fonctionnement d’une cellule photovoltaïque
L’absorption d’un photon par un semi-conducteur donne naissance à une paire d’électron-
trou lorsque son énergie est supérieure à celle de la largeur de la bande énergétique atomique
interdite du matériau. Le champ électrique interne à la jonction, entraîne alors le trou vers la
- 6 -
Chapitre I L’effet photovoltaïque
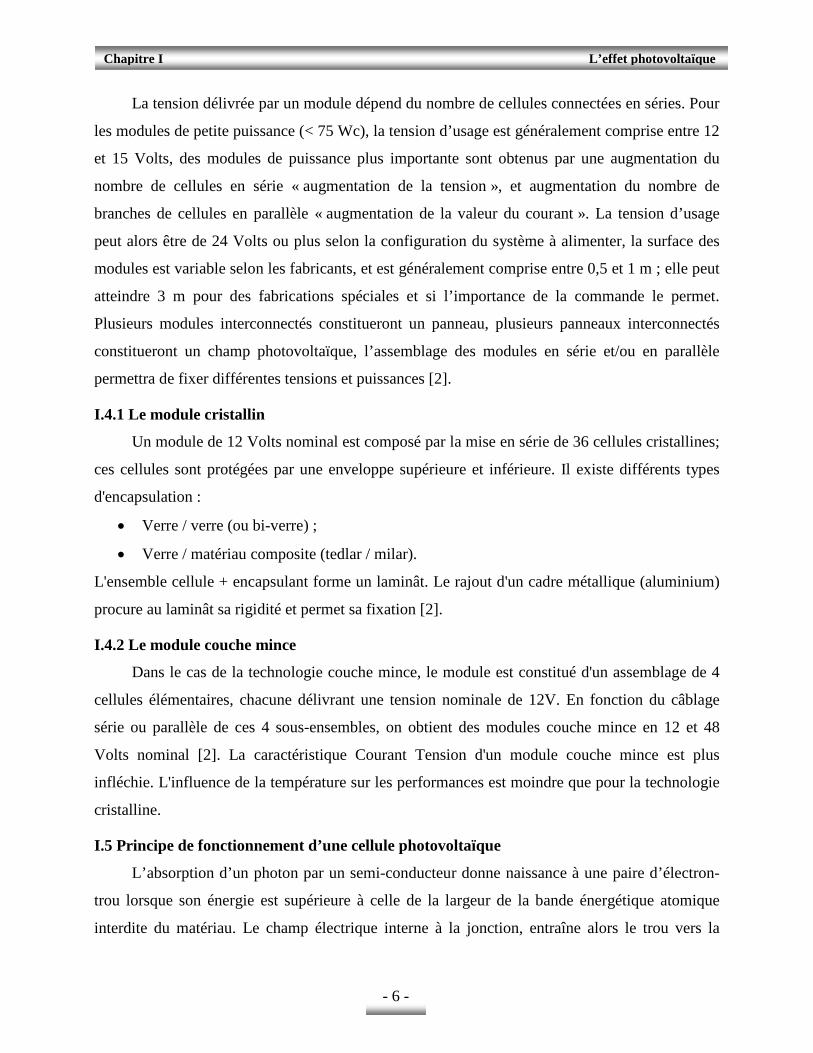
région P et l’électron vers la région N. Par liaison du semi-conducteur de type P et de type N, la
cellule solaire est donc une jonction P-N avec des diverses parties représentées sur les schémas
des figures A et B.
Figure I.2 Cellule photovoltaïque
A. Principe de fonctionnement.
B. Photographie d’une cellule.
Lorsque la cellule est exposée au rayonnement solaire, les photons d'énergie (Eph = h.v )
pénétrant dans la cellule solaire transmettent leur énergie aux atomes de la jonction. Si cette
énergie est suffisamment élevée, elle peut faire passer les électrons de la bande de valence à la
bande de conduction du matériau semi-conducteur et créer ainsi les paires «électron- trou». Les
électrons (charges N) et les trous (charges P), sont alors maintenus séparés par un champ
électrique qui constitue une barrière de potentiel.
Si une charge est placée aux bornes de la cellule, les électrons de la zone N rejoignent les
trous de la zone P via la connexion extérieure donnant naissance à une différence de potentiel et
un courant électrique circule.
I.6 Rendement d'une cellule solaire
Le rendement,η des cellules PV désigne le rendement de conversion en puissance.Il est
défini comme étant le rapport entre la puissance maximale délivrée par la cellule et la puissance
lumineuse incidente,Pin .
(I.0)
A B
- 7 -
Chapitre I L’effet photovoltaïque
Ce rendement peut être amélioré en augmentant le facteur de forme, le courant de court
circuit et la tension à circuit ouvert . le rendement de conversion est un paramétre essentiel.En
effet,la seule connaissance de sa valeur permet d’évaluer les performances de la cellule .
I.7 Modèle électrique
Le comportement d'un panneau photovoltaïque peut être représenté par une courbe
caractéristique du courant en fonction de la tension pour certaines conditions environnementales
(flux de radiation et température). Un modèle de représentation du comportement électrique doit
permettre d'aboutir à une approximation de la caractéristique courant-tension à partir des
variables : tension à vide (VOC), courant de court circuit (ISC), et tension et courant optimaux
(VOP et IOP). Le comportement électrique d’une cellule photovoltaïque est décrit le plus souvent
soit par :
• Un modèle en diode (en une seule exponentielle),
• Soit par un modèle en deux diodes (en double exponentielle).
Chacune de ces formulations établit des relations pour évaluer le courant et la tension en fonction
de la température et de l'ensoleillement, ce modèle d’une diode est représenté par l’équation
suivante :
(I.1)
I : Courant débité par le panneau (A) ;
Iph : Photo courant (A) ;
IS, IS’ : Courants de saturation des diodes en inverse (A) ;
k : Constante de Boltzmann ;
RPc : Résistance en parallèle de la cellule photovoltaïque (Ω) ;
T : Température d’une cellule (°K) ;
q : Charge de l'électron ;
RSc : Résistance en série de la cellule photovoltaïque (Ω) ;
α : Facteur d'idéalité de la diode D ;
- 8 -
Chapitre I L’effet photovoltaïque
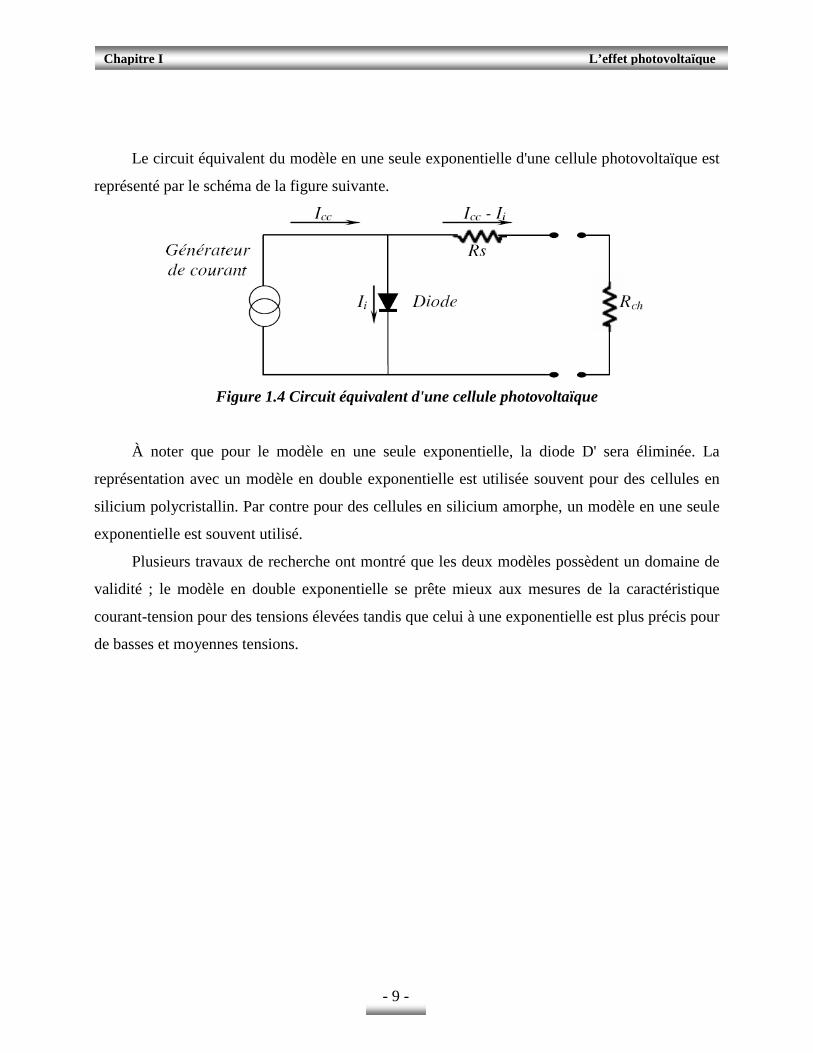
Le circuit équivalent du modèle en une seule exponentielle d'une cellule photovoltaïque est
représenté par le schéma de la figure suivante.
Figure 1.4 Circuit équivalent d'une cellule photovoltaïque
À noter que pour le modèle en une seule exponentielle, la diode D' sera éliminée. La
représentation avec un modèle en double exponentielle est utilisée souvent pour des cellules en
silicium polycristallin. Par contre pour des cellules en silicium amorphe, un modèle en une seule
exponentielle est souvent utilisé.
Plusieurs travaux de recherche ont montré que les deux modèles possèdent un domaine de
validité ; le modèle en double exponentielle se prête mieux aux mesures de la caractéristique
courant-tension pour des tensions élevées tandis que celui à une exponentielle est plus précis pour
de basses et moyennes tensions.
- 9 -
Chapitre I L’effet photovoltaïque
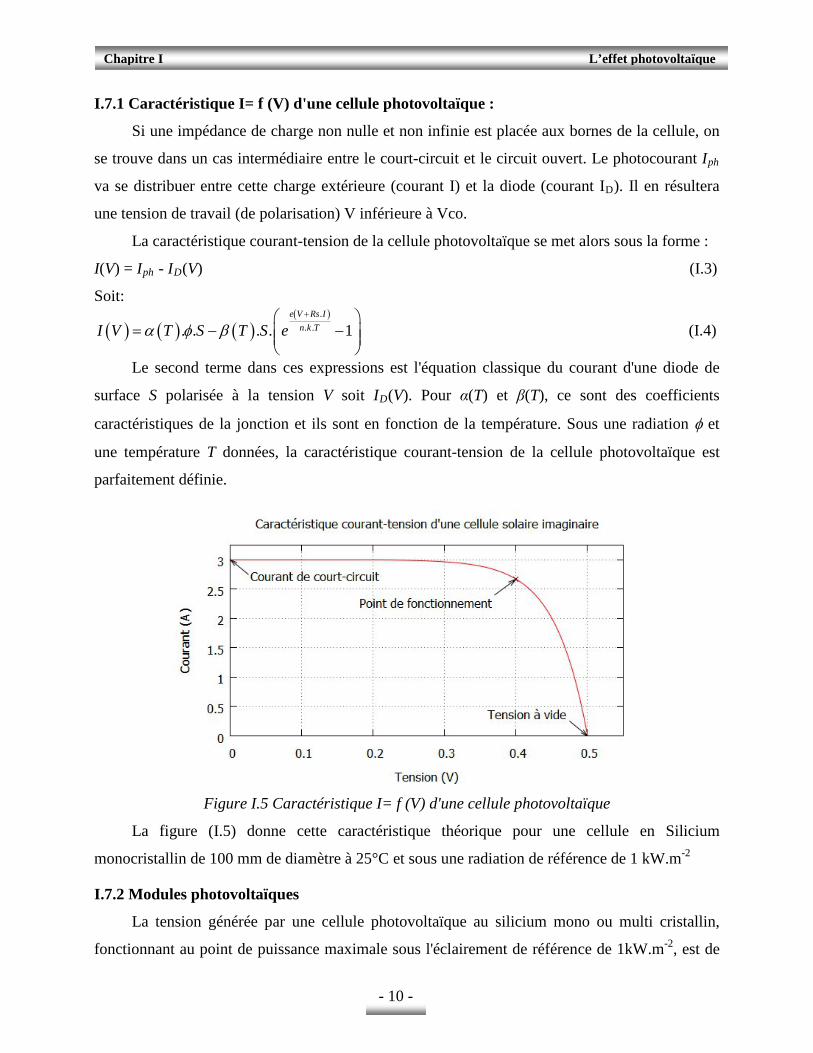
I.7.1 Caractéristique I= f (V) d'une cellule photovoltaïque :
Si une impédance de charge non nulle et non infinie est placée aux bornes de la cellule, on
se trouve dans un cas intermédiaire entre le court-circuit et le circuit ouvert. Le photocourant Iph
va se distribuer entre cette charge extérieure (courant I) et la diode (courant ID). Il en résultera
une tension de travail (de polarisation) V inférieure à Vco.
La caractéristique courant-tension de la cellule photovoltaïque se met alors sous la forme :
I(V) = Iph - ID(V) (I.3)
Soit:
( ) ( ) ( )( ).
. .. . . . 1e V Rs I
n k TI V T S T S eα φ β+
= − −
(I.4)
Le second terme dans ces expressions est l'équation classique du courant d'une diode de
surface S polarisée à la tension V soit ID(V). Pour α(T) et β(T), ce sont des coefficients
caractéristiques de la jonction et ils sont en fonction de la température. Sous une radiation φ et
une température T données, la caractéristique courant-tension de la cellule photovoltaïque est
parfaitement définie.
Figure I.5 Caractéristique I= f (V) d'une cellule photovoltaïque
La figure (I.5) donne cette caractéristique théorique pour une cellule en Silicium
monocristallin de 100 mm de diamètre à 25°C et sous une radiation de référence de 1 kW.m-2
I.7.2 Modules photovoltaïques
La tension générée par une cellule photovoltaïque au silicium mono ou multi cristallin,
fonctionnant au point de puissance maximale sous l'éclairement de référence de 1kW.m-2, est de
- 10 -

Chapitre I L’effet photovoltaïque
l'ordre de 0,55 V et le courant est fonction de la surface de la cellule. Il convient donc de grouper
en série et en parallèle des cellules élémentaires pour adapter tension et courant en fonction des
contraintes de la charge à alimenter.
Il est important de noter dès à présent que la caractéristique courant-tension d'un
groupement de cellules photovoltaïques sera directement homothétique de la courbe I (V) d'une
cellule de base. Il en sera de même pour tout le réseau de caractéristiques. En conséquence, tout
ce qui a été dit pour une cellule individuelle restera valable pour un groupement.
I.7.2.1 Regroupement en série
Une association de (Ns) cellule en série figure (I.6) permet d’augmenter la tension du
générateur photovoltaїque. Les cellule sont alors traversées par le méme courant et la
caractéristique résultant du groupement série est obtenues par addition des tensions élémentaires
de chaque cellule. l’équation résume les caractéristique électrique d’une association série de (Ns)
cellules [10].
Figure I.6 Mise en série des cellules
- 11 -
Chapitre I L’effet photovoltaïque
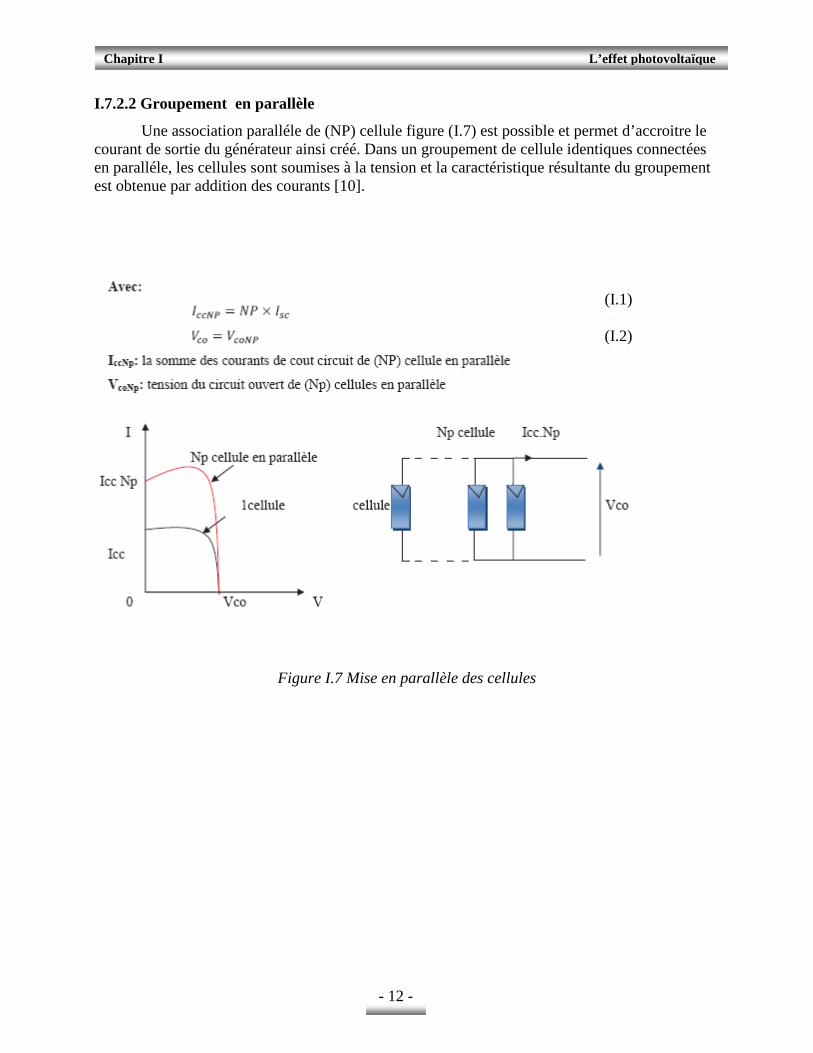
I.7.2.2 Groupement en parallèle
Une association paralléle de (NP) cellule figure (I.7) est possible et permet d’accroitre le courant de sortie du générateur ainsi créé. Dans un groupement de cellule identiques connectées en paralléle, les cellules sont soumises à la tension et la caractéristique résultante du groupement est obtenue par addition des courants [10].
Figure I.7 Mise en parallèle des cellules
(I.1)
(I.2)
- 12 -
Chapitre I L’effet photovoltaïque
I.7.3 Caractéristiques énergétiques d’une cellule PV
Comme dans tous les systèmes énergétiques, l’énergie disponible aux bornes d’une cellule
PV est fonction de l’énergie entrante et des pertes, ceci peut être représenté par l’expression
suivante:
E électrique = E lumineuse - P thermique
Avec :
E électrique : L’énergie disponible aux bornes de la cellule PV (tension courant).
E lumineuse : L’énergie incidente (flux lumineux).
P thermique : les pertes thermiques (par convection, rayonnement et conduction).
I.7.4 Les caractéristiques électriques d’une cellule PV
On peut définir électriquement une cellule PV d’après ses caractéristiques, et sont comme
suit ;
I.7.4.1 La courbe courant tension d’une cellule PV
La courbe caractéristique d'une cellule PV représente la variation du courant qu'elle produit
en fonction de la tension aux bornes de la cellule PV, depuis le court-circuit (tension nulle
correspondant au courant maximum produit) jusqu'au circuit ouvert (courant nul pour une tension
maximale aux bornes de la cellule). Cette courbe est établie dans des conditions ambiantes de
fonctionnement (rayonnement donné, répartition de ce rayonnement, cellule PV à une
température donnée, air ambiant circulant à une vitesse donnée). En effet, le fonctionnement des
cellules photovoltaïques dépend des conditions d’ensoleillement et de température à la surface de
la cellule. Ainsi, chaque courbe courant/tension correspond à des conditions spécifiques de
fonctionnement ; si par exemple la température de la surface évolue, la courbe n’est plus la même
[3].
- 13 -
Chapitre I L’effet photovoltaïque
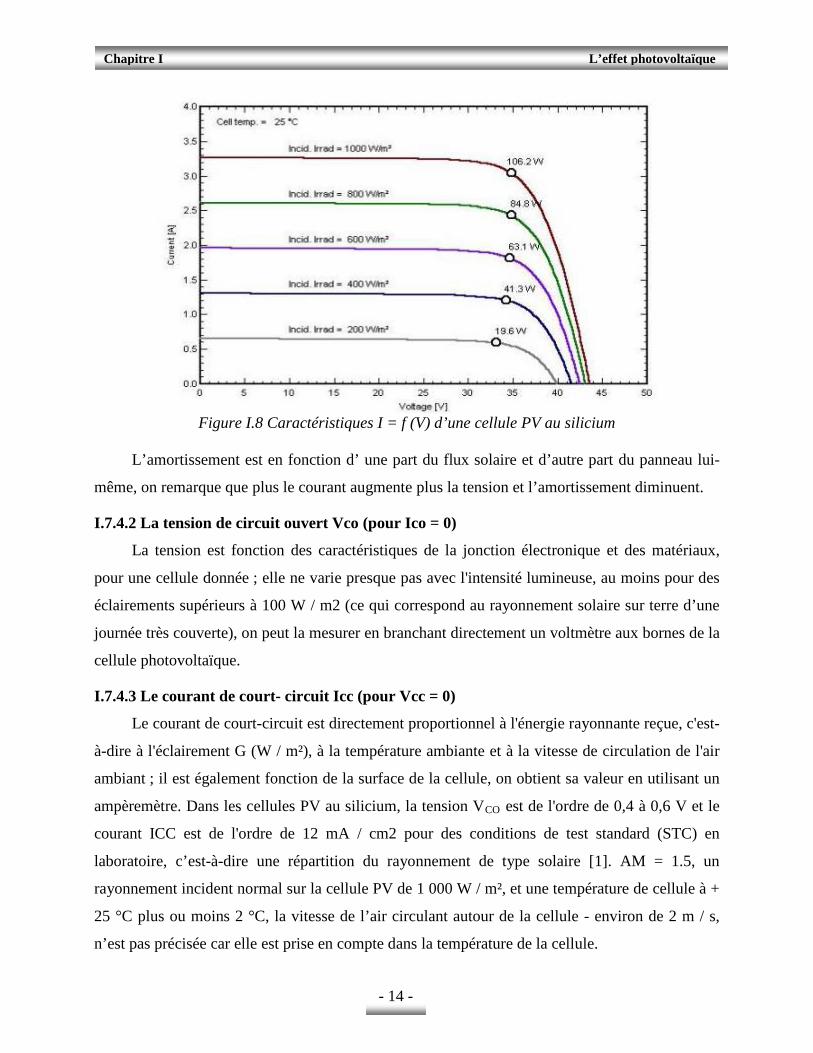
Figure I.8 Caractéristiques I = f (V) d’une cellule PV au silicium
L’amortissement est en fonction d’ une part du flux solaire et d’autre part du panneau lui-
même, on remarque que plus le courant augmente plus la tension et l’amortissement diminuent.
I.7.4.2 La tension de circuit ouvert Vco (pour Ico = 0)
La tension est fonction des caractéristiques de la jonction électronique et des matériaux,
pour une cellule donnée ; elle ne varie presque pas avec l'intensité lumineuse, au moins pour des
éclairements supérieurs à 100 W / m2 (ce qui correspond au rayonnement solaire sur terre d’une
journée très couverte), on peut la mesurer en branchant directement un voltmètre aux bornes de la
cellule photovoltaïque.
I.7.4.3 Le courant de court- circuit Icc (pour Vcc = 0)
Le courant de court-circuit est directement proportionnel à l'énergie rayonnante reçue, c'est-
à-dire à l'éclairement G (W / m²), à la température ambiante et à la vitesse de circulation de l'air
ambiant ; il est également fonction de la surface de la cellule, on obtient sa valeur en utilisant un
ampèremètre. Dans les cellules PV au silicium, la tension VCO est de l'ordre de 0,4 à 0,6 V et le
courant ICC est de l'ordre de 12 mA / cm2 pour des conditions de test standard (STC) en
laboratoire, c’est-à-dire une répartition du rayonnement de type solaire [1]. AM = 1.5, un
rayonnement incident normal sur la cellule PV de 1 000 W / m², et une température de cellule à +
25 °C plus ou moins 2 °C, la vitesse de l’air circulant autour de la cellule - environ de 2 m / s,
n’est pas précisée car elle est prise en compte dans la température de la cellule.
- 14 -
Chapitre I L’effet photovoltaïque
I.7.4.4 La puissance électrique d’une cellule PV
Dans des conditions ambiantes de fonctionnement fixes (éclairement, température, vitesse
de circulation de l'air ambiant,… etc.), la puissance électrique P (W) disponible aux bornes d'une
cellule PV est égale au produit du courant continu fourni I par une tension continue donnée V :
P = V × I (I.1)
P (W), Watt : Puissance mesurée aux bornes de la cellule PV ;
U (V), Volt : Tension mesurée aux bornes de la cellule PV ;
I (A), Ampère : Intensité mesurée aux bornes de la cellule PV.
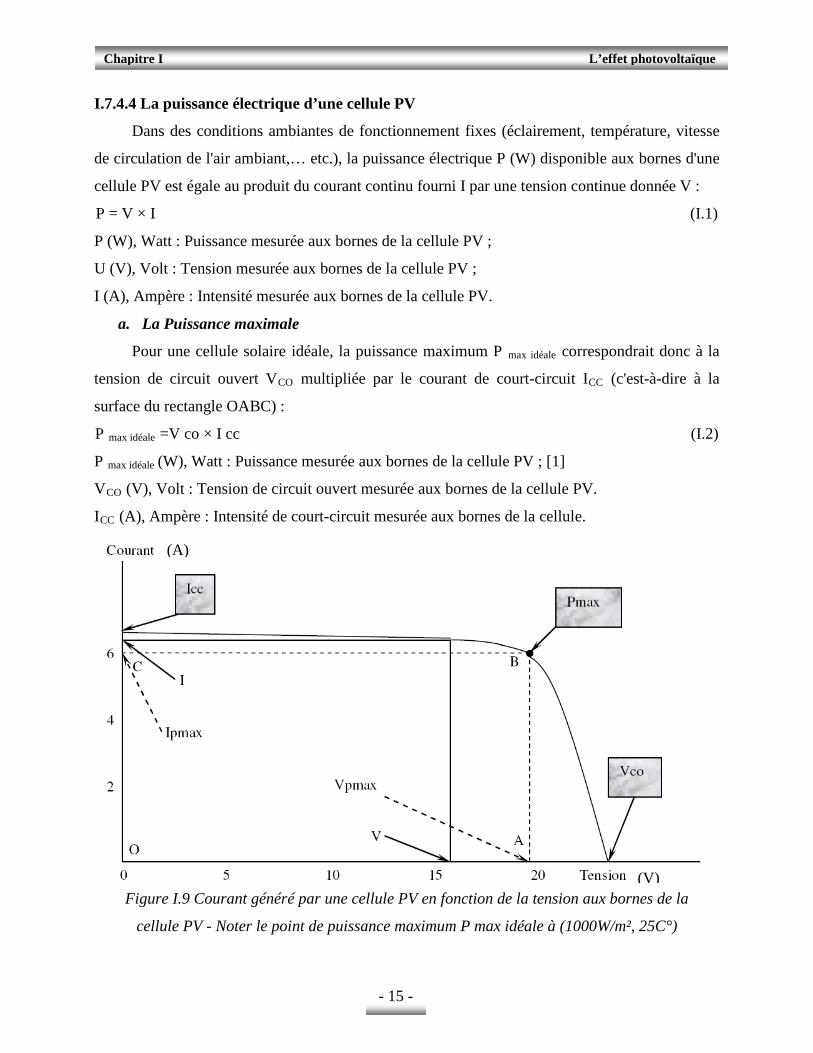
a. La Puissance maximale
Pour une cellule solaire idéale, la puissance maximum P max idéale correspondrait donc à la
tension de circuit ouvert VCO multipliée par le courant de court-circuit ICC (c'est-à-dire à la
surface du rectangle OABC) :
P max idéale =V co × I cc (I.2)
P max idéale (W), Watt : Puissance mesurée aux bornes de la cellule PV ; [1]
VCO (V), Volt : Tension de circuit ouvert mesurée aux bornes de la cellule PV.
ICC (A), Ampère : Intensité de court-circuit mesurée aux bornes de la cellule.
Figure I.9 Courant généré par une cellule PV en fonction de la tension aux bornes de la
cellule PV - Noter le point de puissance maximum P max idéale à (1000W/m², 25C°)
(A)
(V)
- 15 -
Chapitre I L’effet photovoltaïque
b. La puissance crête d’une cellule PV
Dans le cas d’utilisation de photopiles avec le rayonnement solaire, la puissance crête d'une
photopile, aussi nommée puissance "catalogue", notée Wc (Watt crête) ou Wp (Watt peak),
représente la puissance électrique maximum délivrée dans les conditions suivantes dites
conditions standards :
• Éclairement solaire de 1 kW / m2 (correspondant à peu près à une exposition
perpendiculaire aux rayons du soleil à midi par temps clair d'été) ;
• Température de la cellule PV égale à + 25 °C ;
• Répartition spectrale du rayonnement dit AM=1.5.
I.8 Les paramètres qui influent sur la caractéristique courant-tension
Les caractéristiques électriques d'une cellule PV dépendent de plusieurs paramètres parmi
lesquels on trouve, l'éclairement, la température de la jonction au niveau de la surface exposée, la
résistance série et la résistance shunt.
I.8.1 Influence de l'éclairement
Le photo-courant Iph crée dans une cellule photovoltaïque est pratiquement proportionnelle
aux flux lumineux Φ, et la surface S de la jonction soumise au rayonnement solaire, par contre la
tension e circuit ouvert est indépendante de la surface S.
I.8.2 Effet de la température sur la cellule photovoltaïque
Les cellules photovoltaïques étant destinées à fonctionner à l’extérieur, elles seront
soumises à la fois au froid intense du petit matin d’hiver et aux fortes chaleurs d’été. Il est ainsi
indispensable de connaître leurs propriétés électriques sur une large gamme de température.
On obtient de la caractéristique courant-tension ainsi qu’illustrée ci-dessous : [9]
- 16 -
Chapitre I L’effet photovoltaïque
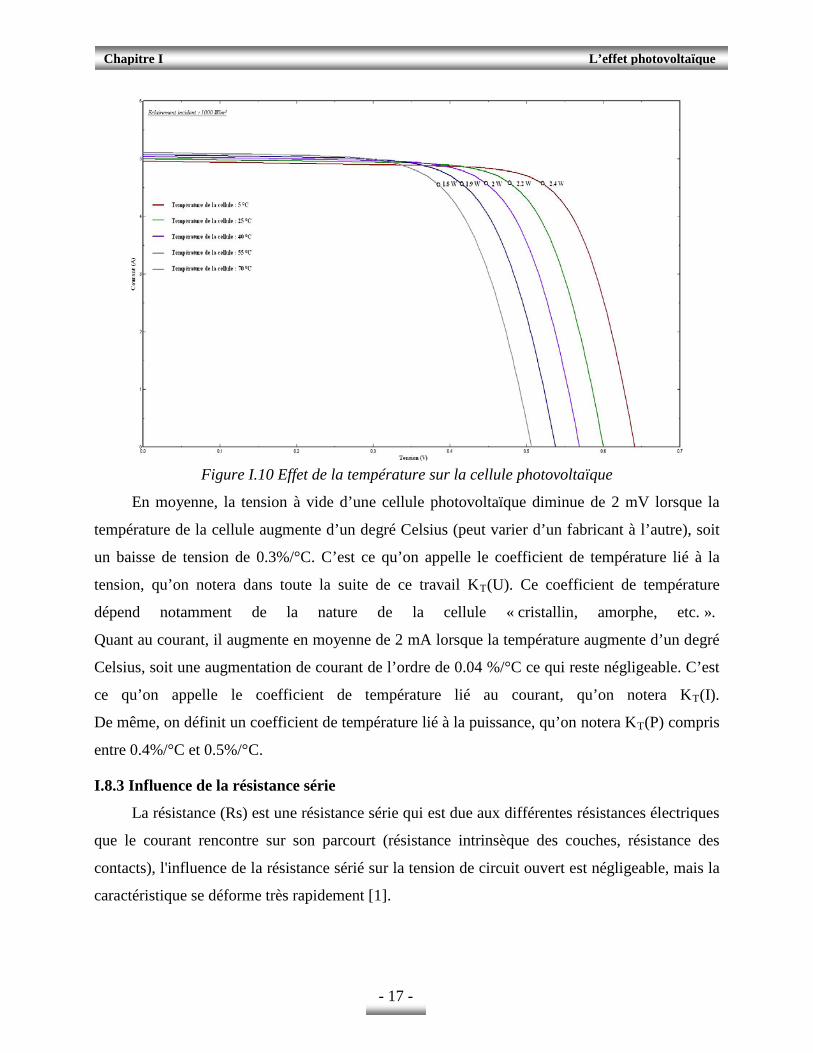
Figure I.10 Effet de la température sur la cellule photovoltaïque
En moyenne, la tension à vide d’une cellule photovoltaïque diminue de 2 mV lorsque la
température de la cellule augmente d’un degré Celsius (peut varier d’un fabricant à l’autre), soit
un baisse de tension de 0.3%/°C. C’est ce qu’on appelle le coefficient de température lié à la
tension, qu’on notera dans toute la suite de ce travail KT(U). Ce coefficient de température
dépend notamment de la nature de la cellule « cristallin, amorphe, etc. ».
Quant au courant, il augmente en moyenne de 2 mA lorsque la température augmente d’un degré
Celsius, soit une augmentation de courant de l’ordre de 0.04 %/°C ce qui reste négligeable. C’est
ce qu’on appelle le coefficient de température lié au courant, qu’on notera KT(I).
De même, on définit un coefficient de température lié à la puissance, qu’on notera KT(P) compris
entre 0.4%/°C et 0.5%/°C.
I.8.3 Influence de la résistance série
La résistance (Rs) est une résistance série qui est due aux différentes résistances électriques
que le courant rencontre sur son parcourt (résistance intrinsèque des couches, résistance des
contacts), l'influence de la résistance sérié sur la tension de circuit ouvert est négligeable, mais la
caractéristique se déforme très rapidement [1].
- 17 -
Chapitre I L’effet photovoltaïque
I.8.4 Influence de la résistance shunt
La résistance shunt (Rsh) est une résistance qui prend en compte les fuites inévitables du
courant qui interviennent entre les bornes opposées positives d'une photopile (micro court-circuit
dans le silicium en particulier) .[1]
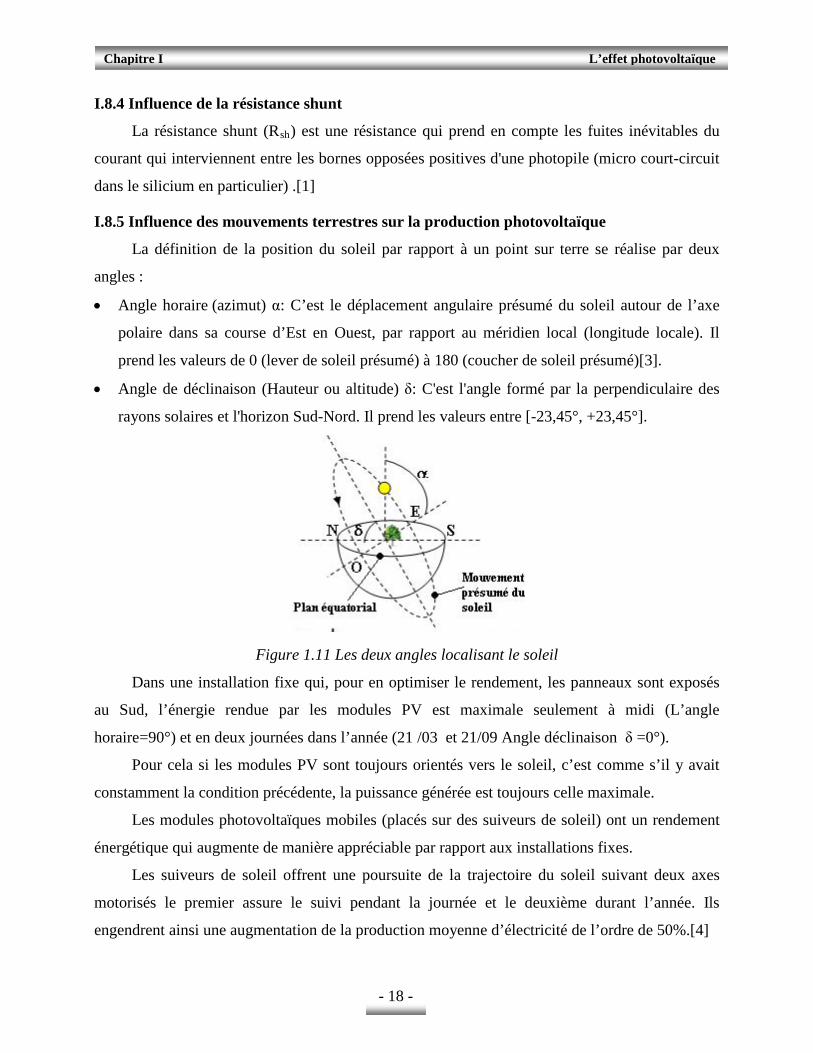
I.8.5 Influence des mouvements terrestres sur la production photovoltaïque
La définition de la position du soleil par rapport à un point sur terre se réalise par deux
angles :
• Angle horaire (azimut) α: C’est le déplacement angulaire présumé du soleil autour de l’axe
polaire dans sa course d’Est en Ouest, par rapport au méridien local (longitude locale). Il
prend les valeurs de 0 (lever de soleil présumé) à 180 (coucher de soleil présumé)[3].
• Angle de déclinaison (Hauteur ou altitude) δ: C'est l'angle formé par la perpendiculaire des
rayons solaires et l'horizon Sud-Nord. Il prend les valeurs entre [-23,45°, +23,45°].
Figure 1.11 Les deux angles localisant le soleil
Dans une installation fixe qui, pour en optimiser le rendement, les panneaux sont exposés
au Sud, l’énergie rendue par les modules PV est maximale seulement à midi (L’angle
horaire=90°) et en deux journées dans l’année (21 /03 et 21/09 Angle déclinaison δ =0°).
Pour cela si les modules PV sont toujours orientés vers le soleil, c’est comme s’il y avait
constamment la condition précédente, la puissance générée est toujours celle maximale.
Les modules photovoltaïques mobiles (placés sur des suiveurs de soleil) ont un rendement
énergétique qui augmente de manière appréciable par rapport aux installations fixes.
Les suiveurs de soleil offrent une poursuite de la trajectoire du soleil suivant deux axes
motorisés le premier assure le suivi pendant la journée et le deuxième durant l’année. Ils
engendrent ainsi une augmentation de la production moyenne d’électricité de l’ordre de 50%.[4]
- 18 -
Chapitre I L’effet photovoltaïque
I.9 Conclusion
Dans ce chapitre, nous avons vu l’intérêt de l’énergie photovoltaïque dans différents
domaines ainsi que les différents procédés d’exploitation. Ainsi, nous avons présenté une
modélisation d’un module photovoltaïque et les allures I-V en fonction des paramètres internes et
externes. Le mouvement de la terre autour de lui-même et autour du soleil pose le problème de la
variation de l’éclairement solaire. D’où, mettre en oeuvre un système suiveur mécanique est
devenu une nécessité.
Dans le chapitre suivant, nous allons faire une brève synthèse sur quelques techniques
d’optimisation énergétiques basées sur la poursuite.
C'est en vue d'améliorer les techniques en la matière et les techniques d'orientation dans
lesquelles nous avons borné l’intervalle d’activité du panneau « la durée maximale quotidienne et
saisonnière » et que nous allons aborder au second chapitre.
- 19 -
Chapitre II
L’optimisation par orientations et
la logique de la carte Arduino
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
II.1 Introduction
Depuis très longtemps, l’homme a cherché à utiliser l’énergie émise par le soleil, étoile la
plus proche de la terre. La plupart des utilisations sont directes comme en agriculture, à travers la
photosynthèse ou dans diverses applications de séchage et chauffage, autant artisanale
qu’industrielle. Cette énergie est disponible en abondance sur toute la surface terrestre et malgré
une atténuation importante lors de la traversée de l’atmosphère, une quantité encore importante
arrive à la surface du sol. On peut ainsi compter sur 1000 W/m2 dans les zones tempérées et
jusqu’à 1400 W/m2 lorsque l’atmosphère est faiblement polluée en poussière ou en eau.
Le flux solaire reçu au niveau du sol terrestre dépend ainsi de plusieurs paramètres comme :
• L’orientation, la nature et l’inclinaison de la surface terrestre,
• La latitude du lieu de collecte, de son degré de pollution ainsi que de son altitude,
• La période de l’année,
• L’instant considéré dans la journée.
Les panneaux photovoltaïques présentent la qualité d’une ressource naturelle d’énergie
propre et durable, malheureusement leur mauvais rendement « moins de 20% dans les meilleures
conditions » dû à l’influence de plusieurs facteurs « alternance jour – nuit, vent, éclairement,
température… » nous oblige à amplifier la capacité de réception d’énergie rayonnante et mener
ainsi le générateur photovoltaïque à un point de fonctionnement maximal (V-I). Pour cela,
plusieurs systèmes de correction sont employés.
En effet, la plupart des techniques de correction et de contrôle concentrent leur intérêt sur la
poursuite du soleil.
II.2 Les différentes méthodes d’amélioration du rendement d’un panneau photovoltaïque
II.2.1 Les régulateurs à recherche du point de puissance maximale
MPPT ou Maximum Power Point Tracking. Les régulateurs à recherche de point de
puissance maximale qui utilisent un circuit électronique spécial permettent de soutirer en
permanence du champ de capteurs sa puissance maximale. Cela permet donc de récupérer un
maximum d'énergie quelque soit la température et l'ensoleillement. [1]
Les tensions et les courants sont mesurés en permanence de manière à déduire la puissance
extraite du panneau. La puissance ainsi obtenue est comparée avec la puissance de l'instant
précédent. La tension aux bornes des panneaux est ensuite augmentée ou réduite suivant le
résultat de la comparaison.
- 20 -
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
Citons quelques travaux concernant l’optimisation de la conversion.
• La méthode de poursuite du point de puissance maximale « Perturber et Observer » a
adapté son algorithme sur le microcontrôleur PIC 16F876, l’a ensuite réalisé sur une carte
électronique qui permet d'exploiter idéalement les systèmes d'alimentations
photovoltaïques : cette méthode à été étudiée par Melouka, Abdelhamid, Benarroudj,
Marouane et Larbes. [ 9]
• Hassaine, Linda, et Haddadi, M :ce travail a modélisé et simulé un système
photovoltaïque fonctionnant au point de puissance maximale du générateur pour délivrer
le maximum d'énergie produite à la charge, en tenant compte des variations du flux solaire
et de la température. Pour un tel système, il a été intercalé d’un convertisseur DC/DC type
« boost ». La simulation a été menée en utilisant le logiciel PSPICE avec la bibliothèque
ABM, qui a permis d'obtenir le modèle simulé du générateur PV couplé à ce convertisseur
[ 7]
II.2.2 Techniques d’optimisation par orientations
L'installation des modules peut se faire sur un toit si son orientation et son inclinaison sont
bonnes, ou sur le sol dans un endroit bien dégagé, aéré (10 cm d'espace sous les modules est
vivement conseillé) et protégé. On les place habituellement avec une pente vers l'équateur (vers le
sud dans l'hémisphère nord). L'inclinaison des panneaux fixe n'est pas critique, on la prend en
général égale à la latitude, avec une tolérance de 15°. On choisit une inclinaison supérieure ou
inférieure à la latitude, suivant les besoins. Toutefois l'inclinaison des modules devrait rester
supérieure à 10° pour assurer un auto-nettoyage lors des pluies. Il existe aussi des structures
beaucoup plus complexes, qui suivent le soleil dans son mouvement quotidien et d’autres qui
suivent le mouvement saisonnier. En plus, pour augmenter le rendement des panneaux
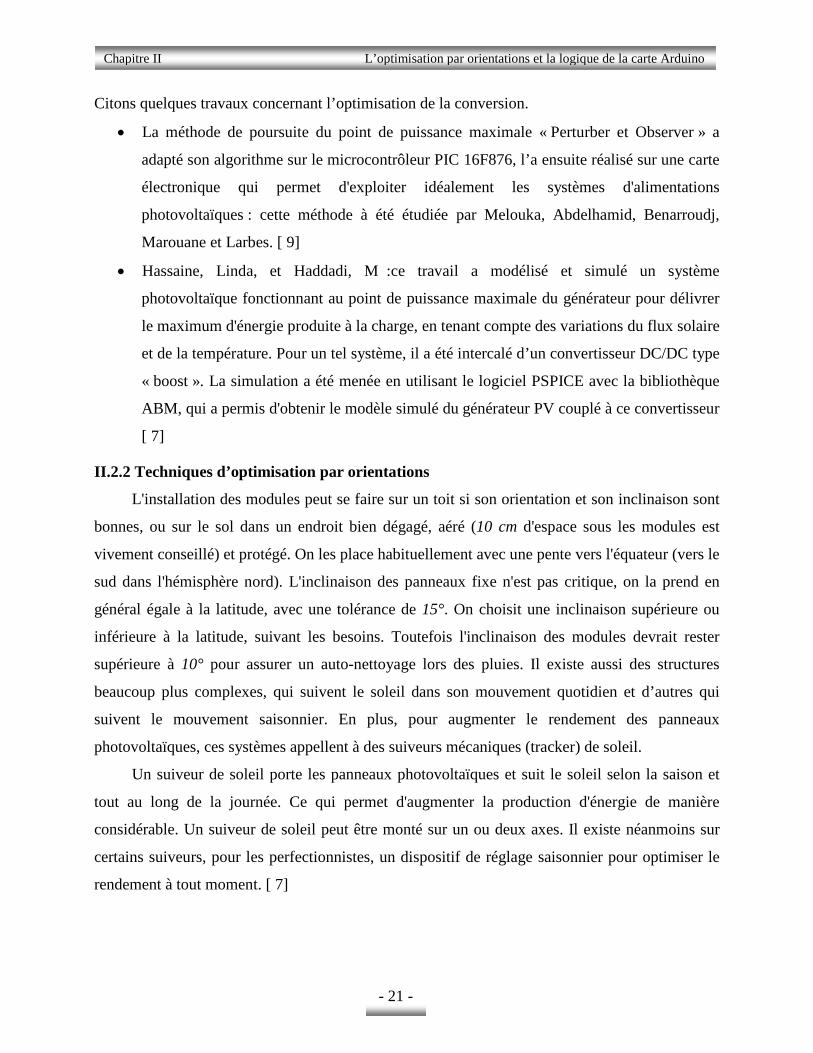
photovoltaïques, ces systèmes appellent à des suiveurs mécaniques (tracker) de soleil.
Un suiveur de soleil porte les panneaux photovoltaïques et suit le soleil selon la saison et
tout au long de la journée. Ce qui permet d'augmenter la production d'énergie de manière
considérable. Un suiveur de soleil peut être monté sur un ou deux axes. Il existe néanmoins sur
certains suiveurs, pour les perfectionnistes, un dispositif de réglage saisonnier pour optimiser le
rendement à tout moment. [ 7]
- 21 -
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
Figure II.1 Suiveur mécanique du soleil
Pour assurer le fonctionnement du suiveur, il existe deux techniques
II.3 Les techniques de poursuite
Pour un maximum d'ensoleillement, la surface active du panneau solaire devrait être
perpendiculaire aux radiations solaires, les techniques employées utilisent des moyens différents
et le rendement de ce fait varie d’une technique à une autre ; ce dernier est alors un paramètre
important pour le choix de la technique. Grossièrement, on peut subdiviser ces techniques en
deux catégories :
• La première catégorie s’est basée sur le fait que le soleil a un trajet périodiquement fixe
dans un endroit donné et l’a introduit dans des programmes aux langages différents. Le
rendement de ces techniques est élevé mais leur coût l’est également, car dans ce cas la
présence d’un microprocesseur est obligatoire « utilisation d’un PC ».
• La deuxième catégorie utilise des capteurs variés et la commande se fait grâce à des
composants divers, contrairement à la première, l’étude de la zone dans laquelle le
système sera implanté n’est pas nécessaire et le coût est moindre, cependant le rendement
est malheureusement bas.
II.4 Rayonnement dans le plan capteur
L’effet de l’inclinaison et l’orientation des capteurs peuvent être évalués par le facteur de
transposition, c’est-à-dire le rapport de l’énergie reçue sur le plan considéré par rapport à la
valeur horizontale.
- 22 -
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
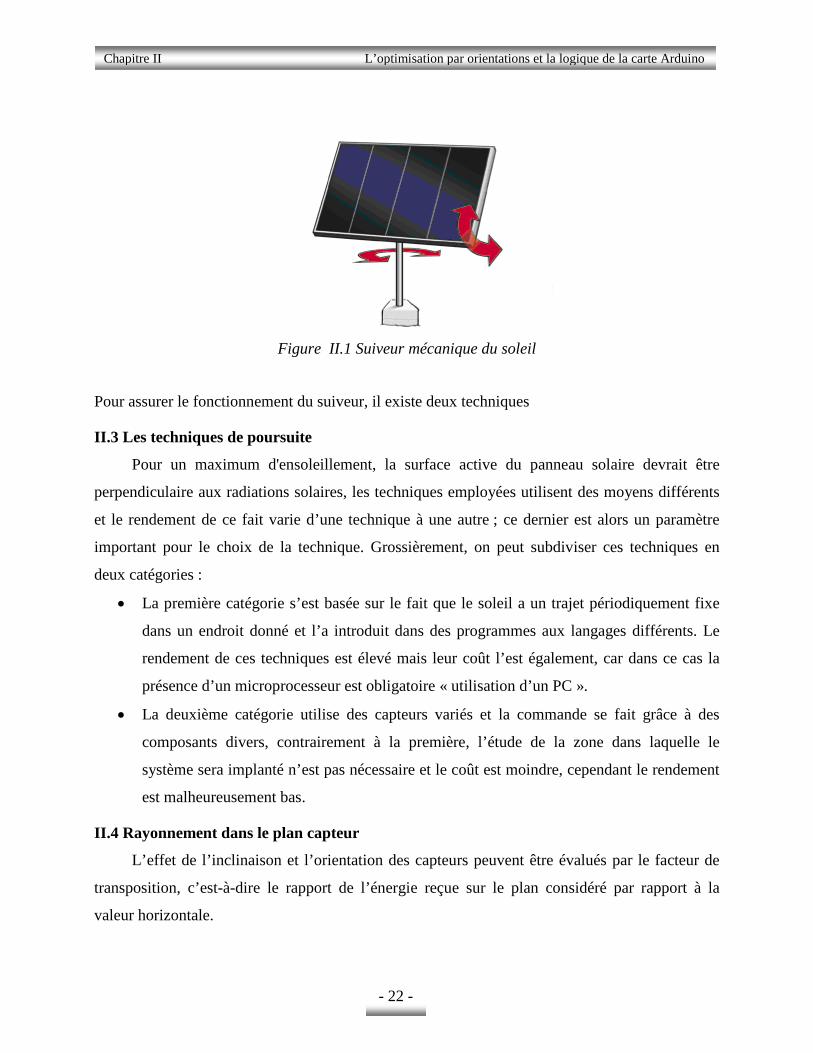
II.4.1 Orientation – Inclinaison
Vous devez également savoir quelle sera l’orientation de votre future installation : sud, sud-
est, nord… En Algérie, la meilleure orientation est évidemment plein sud.
Figure II.2 Orientation standard
L’inclinaison des capteurs est également un paramètre important : à Ouargla l’inclinaison
idéale est de 30° par rapport à l’horizontale, pour une production optimale à l’année. Pour que
l'orientation d'une installation photovoltaïque soit optimale, ses panneaux doivent être orientés
vers le Sud et inclinés à 30°.
II.4.2 Rayonnement sur un plan incliné
Un plan incliné est caractérisé par son inclinaison β (par rapport à l’horizontale), et son
orientation ou azimut γ par rapport au sud (négatif vers l’est, sens anti trigonométrique).
L’angle d’incidence α est l’angle formé entre la normale du plan et les rayons du soleil. On
parle souvent d’incidence normale lorsque α = 0, c’est-à-dire les rayons sont perpendiculaires au
capteur. L’angle d’incidence s’écrit en fonction de la position du soleil (HS, AZ):
cos α = cos β sin HS + sin β cos HS cos (AZ- γ) (II.1)
Pour un rayonnement dans le plan capteur, l’effet de l’inclinaison et l’orientation des
capteurs peuvent être évalués par le facteur de transposition, noté R (β, γ), c’est-à-dire le rapport
de l’énergie reçue sur le plan considéré, par rapport à la valeur horizontale.
Global plan (β, γ) = R (β, γ) × Global horiz (II.2)
La transposition du rayonnement du plan horizontal dans un plan quelconque dépend de la
géométrie solaire, c’est donc un processus à caractère instantané. Dans la pratique, pour des
valeurs horaires, on choisit la position du soleil au milieu de l’intervalle. Aux débuts et fins de
journées, l’intervalle est délimité par le lever / coucher du soleil.[4]
30°
- 23 -

Chapitre II L’optimisation par orientations et la logique de la carte Arduino
La transposition s’applique différemment pour chaque composante du rayonnement. Pour
la composante directe, il s’agit d’une projection dans un plan différent, donc d’une simple
opération géométrique (effet « cosinus »).
Direct tp = Direct th · cos α /sin HS (II.3)
II.5 Influence énergétique de la déviation solaire :
Dans le cas d'un panneau fixe (absence de poursuite) sur deux angles Ωo et βo, le
mouvement présumé du soleil affecte la quantité d'énergie rayonnante reçue par le GPV. Alors, la
puissance électrique produite sera diminuée avec les déviations sur les deux angles δ et α.
Alors, nous pouvons écrire la diminution de la puissance en fonction des angles Ω et β
comme suit:
maxcosp p
Ω= Ω (II.4)
( )max
sin 90p pβλ β= − + (II.5)
La variation de la puissance générée pour une déviation ΔΩ et Δβ à partir d'une position
initiale Ωo et βo sera:
( )0 0maxsin . cos 90 .
Totp p λ β β ∆ = − Ω ∆Ω− °− + ∆ (II.6)
La puissance maximale Pmax est associée à la puissance délivrée par le panneau dans les
meilleures conditions angulaires (perpendicularité parfaite du panneau avec les rayons solaires).
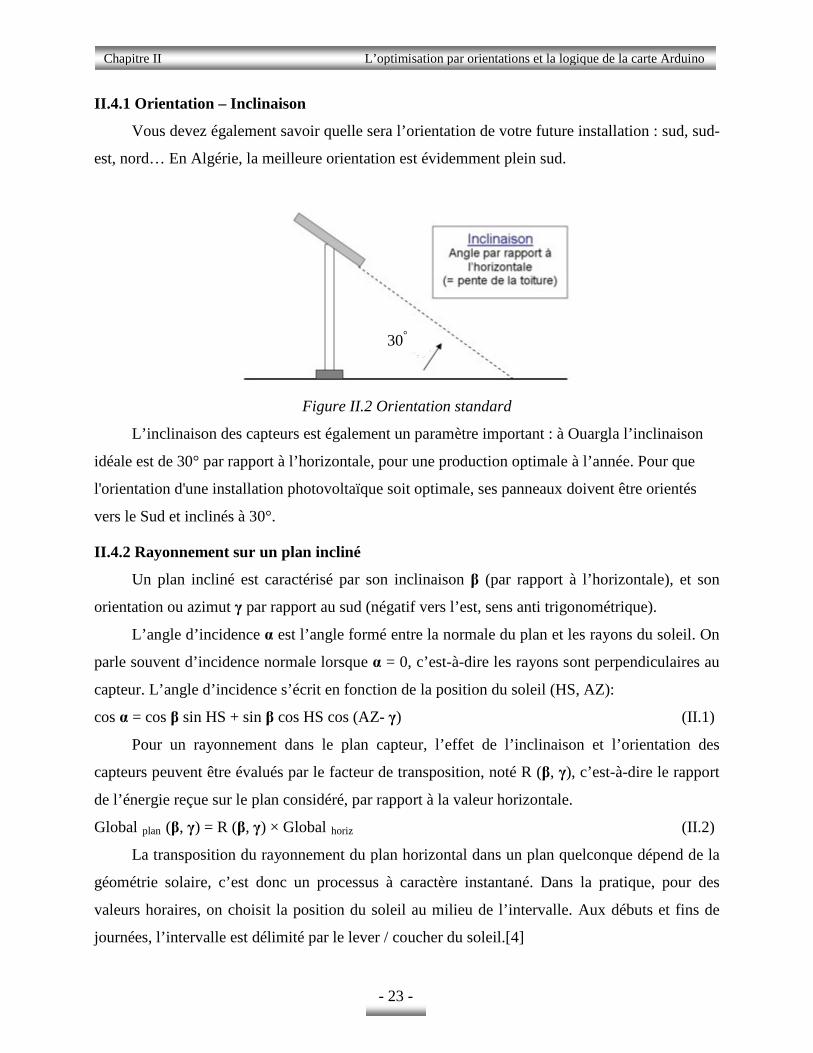
II.6 Schéma de principe
Le principe de poursuite de radiation basée sur les données astronomiques liées à la
position solaire (α, δ) est d’orienter le panneau sur deux angles (Ω, β) pour avoir angle
incident=90°. On utilise deux moteurs commandés en position angulaire. L’algorithme de calcul
des angles est implanté dans une plateforme numérique (Microcontrôleur, DSP, FPGA,…) ou
analogique (Calculateur à base d’Ampli Op). Le schéma ci-dessous montre une implémentation
numérique de cet algorithme à base de microcontrôleur commandé par une carte Arduino.
- 24 -
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
Figure II.3 Principe de poursuite globale
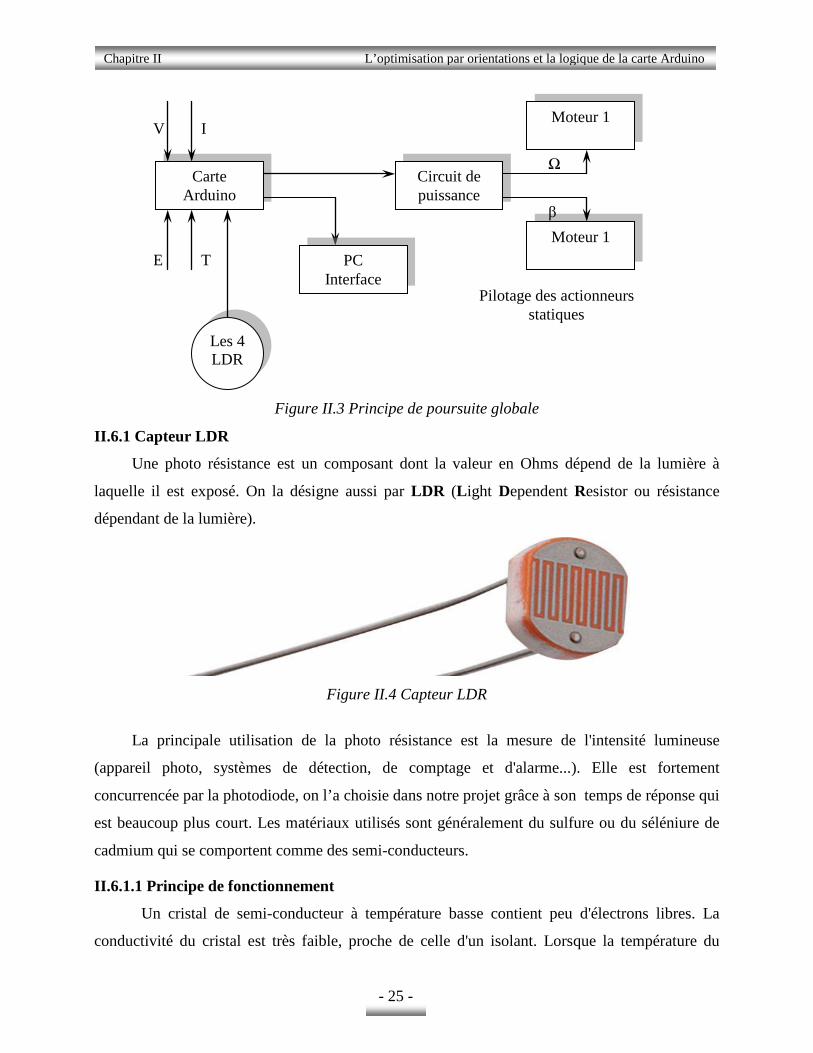
II.6.1 Capteur LDR
Une photo résistance est un composant dont la valeur en Ohms dépend de la lumière à
laquelle il est exposé. On la désigne aussi par LDR (Light Dependent Resistor ou résistance
dépendant de la lumière).
Figure II.4 Capteur LDR
La principale utilisation de la photo résistance est la mesure de l'intensité lumineuse
(appareil photo, systèmes de détection, de comptage et d'alarme...). Elle est fortement
concurrencée par la photodiode, on l’a choisie dans notre projet grâce à son temps de réponse qui
est beaucoup plus court. Les matériaux utilisés sont généralement du sulfure ou du séléniure de
cadmium qui se comportent comme des semi-conducteurs.
II.6.1.1 Principe de fonctionnement
Un cristal de semi-conducteur à température basse contient peu d'électrons libres. La
conductivité du cristal est très faible, proche de celle d'un isolant. Lorsque la température du
Carte Arduino
Circuit de puissance
Moteur 1
Moteur 1 PC
Interface
I V
E T
Les 4 LDR
Pilotage des actionneurs statiques
Ω
β
- 25 -
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
cristal augmente de plus en plus d'électrons qui étaient immobilisés dans les liaisons covalentes
s'échappent et peuvent participer à la conduction.
A température constante si le même cristal semi-conducteur est soumis à une radiation
lumineuse, l'énergie apportée par les photons peut suffire à libérer certains électrons utilisés dans
les liaisons covalentes entre atomes du cristal. Plus le flux lumineux sera intense, plus le nombre
d'électrons disponibles pour assurer la conduction sera grand, ainsi la résistance de l’LDR est
inversement proportionnelle à la lumière reçue. La sensibilité dépend de la fréquence de la
radiation lumineuse.
II.6.2 Circuit de commande par Le microcontrôleur ATMEL
Aujourd’hui, l'électronique est de plus en plus remplacée par de l'électronique programmée.
On parle aussi de système embarqué ou d'informatique embarqué. Son but est de simplifier les
schémas électroniques et par conséquent réduire l’utilisation de composants électroniques,
réduisant ainsi le coût de fabrication d’un produit. Il en résulte des systèmes plus complexes et
performants pour un espace réduit.
Le module Arduino est un circuit imprimé en matériel libre (plateforme de contrôle) dont
les plans de la carte elle-même sont publiés en licence libre dont certains composants de la carte :
comme le microcontrôleur et les composants complémentaires qui ne sont pas en licence libre.
Un microcontrôleur programmé peut analyser et produire des signaux électriques de manière à
effectuer des tâches très diverses. Arduino est utilisé dans beaucoup d'applications comme
l'électrotechnique industrielle et embarquée ; le modélisme, la domotique mais aussi dans des
domaines différents comme l'art contemporain et le pilotage d'un robot, commande des moteurs
et faire des jeux de lumières, communiquer avec l'ordinateur, commander des appareils mobiles
(modélisme). Chaque module d’Arduino possède un régulateur de tension +5 V et un oscillateur
à quartez 16 MHz (ou un résonateur céramique dans certains modèles). Pour programmer cette
carte, on utilise l’logiciel IDE Arduino. [8]
II.6.2.1 Le choix de la carte Arduino
Actuellement, il existe plus de 20 versions de module Arduino, nous citons quelques un
afin d’éclaircir l’évaluation de ce produit scientifique et académique:
• Arduino NG, programmé avec un et employer un ATmega8.
• L'extrémité d'Arduino, avec une interface d'USB pour programmer et usage d'un
Microcontrôleur ATmega8.
- 26 -
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
• L'Arduino Mini, une version miniature de l'Arduino en utilisant un microcontrôleur
ATmega168.
• L'Arduino Nano, un petit carte programme a l’aide porte USB cette version utilisant un
microcontrôleur ATmega168 (ATmega328 pour une plus nouvelle version).
• Le LilyPad Arduino, une conception de minimaliste pour l'application wearable en
utilisant un microcontrôleur ATmega168.
• Le NG d'Arduino, avec une interface d'USB pour programmer et usage d'un ATmega8.
• Le NG d'Arduino plus, avec une interface d' USB pour programmer et usage d'un
ATmega168.
• L'Arduino Bluetooth, avec une interface de Bluetooth pour programmer en utilisant un
microcontrôleur ATmega168.
• L'Arduino Diecimila, avec une interface d' USB et utilise un microcontrôleur
ATmega168.
• L’Arduino Duemilanove ("2009"), en utilisant un microcontrôleur l'ATmega168
(ATmega328 pour une plus nouvelle version) et actionné par l'intermédiaire de la
puissance d'USB/DC.
• L'Arduino Mega, en utilisant un microcontrôleur ATmega1280 pour I/O additionnel et
mémoire.
• L'Arduino Uno, utilisations microcontrôleur ATmega328.
• 13. L'Arduino Mega2560, utilisations un microcontrôleur ATmega2560 , et possède toute
la mémoire à 256 KBS. Elle incorpore également le nouvel ATmega8U2 (ATmega16U2
dans le jeu de puces d' USB de révision 3).
• L'Arduino Leonardo, avec un morceau ATmega3Ù4 qui élimine le besoin de
raccordement d' USB et peut être employé comme clavier.
• L'Arduino Esplora : ressemblant à un contrôleur visuel de jeu, avec un manche et des
sondes intégrées pour le bruit, la lumière, la température, et l'accélération. [
Parmi ces types, nous avons choisi une carte Arduino Mega (l’amélioration de la carte
Basique). L'intérêt principal de cette carte est de faciliter la mise en œuvre d’une telle commande
qui sera détaillée par la suite. [8]
- 27 -
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
II.6.2.2 Pourquoi Arduino Mega
Il y a de nombreuses cartes électroniques qui possèdent des plateformes basées sur des
microcontrôleurs disponibles pour l'électronique programmée. Tous ces outils prennent en charge
les détails compliqués de la programmation et les intègrent dans une présentation facile à utiliser.
De la même façon, le système Arduino simplifie la façon de travailler avec les microcontrôleurs
tout en offrant aux personnes intéressées plusieurs avantages cités comme suit:
• Les prix (réduits)
• Multi plateforme
• Un environnement de programmation clair et simple
• Logiciel Open Source et extensible
• Matériel Open source et extensible
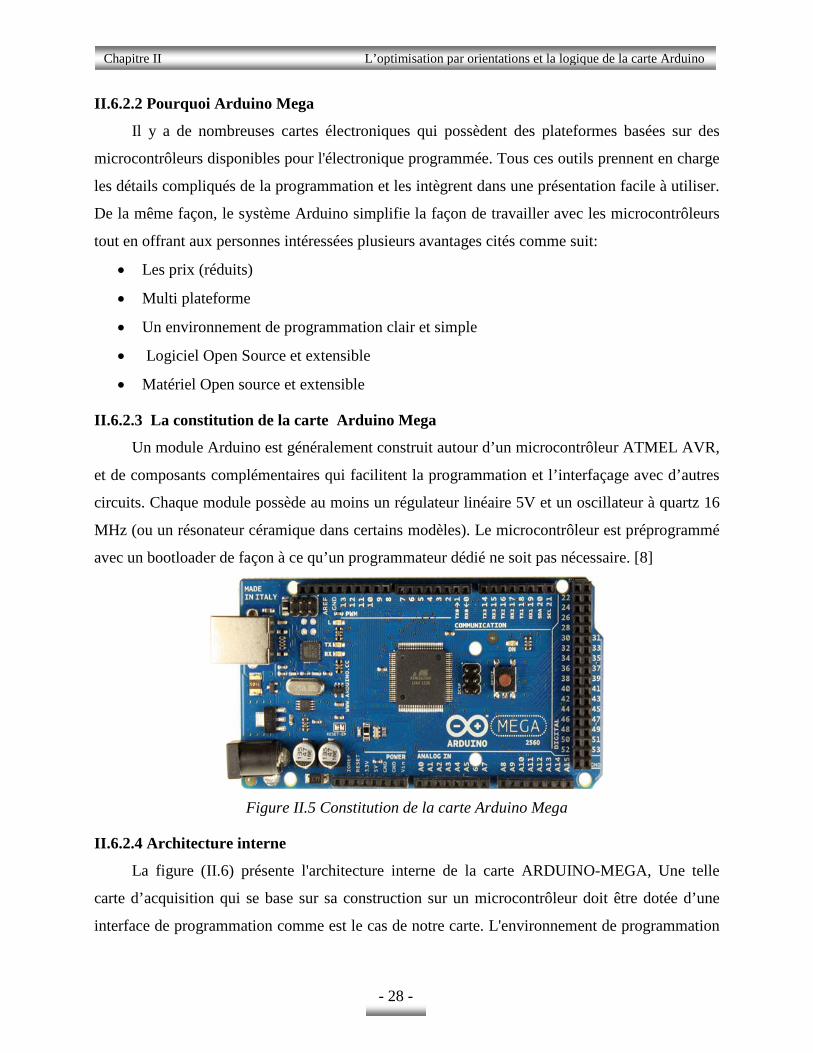
II.6.2.3 La constitution de la carte Arduino Mega
Un module Arduino est généralement construit autour d’un microcontrôleur ATMEL AVR,
et de composants complémentaires qui facilitent la programmation et l’interfaçage avec d’autres
circuits. Chaque module possède au moins un régulateur linéaire 5V et un oscillateur à quartz 16
MHz (ou un résonateur céramique dans certains modèles). Le microcontrôleur est préprogrammé
avec un bootloader de façon à ce qu’un programmateur dédié ne soit pas nécessaire. [8]
Figure II.5 Constitution de la carte Arduino Mega
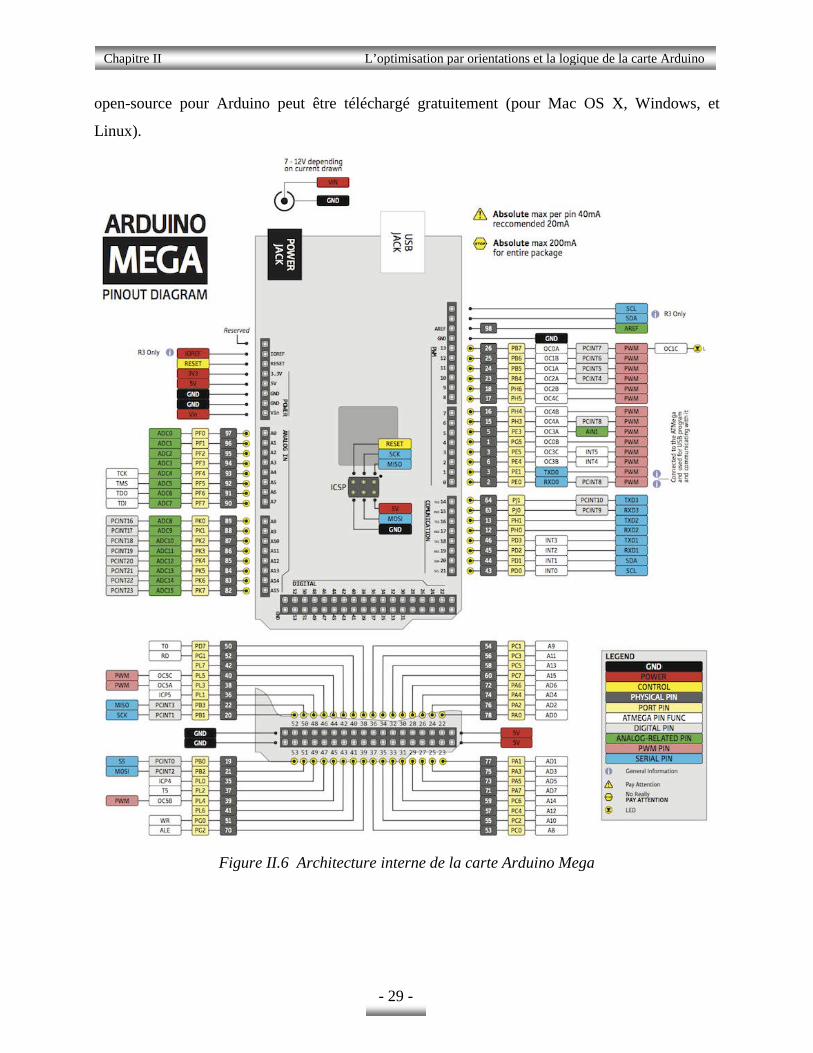
II.6.2.4 Architecture interne
La figure (II.6) présente l'architecture interne de la carte ARDUINO-MEGA, Une telle
carte d’acquisition qui se base sur sa construction sur un microcontrôleur doit être dotée d’une
interface de programmation comme est le cas de notre carte. L'environnement de programmation
- 28 -
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
open-source pour Arduino peut être téléchargé gratuitement (pour Mac OS X, Windows, et
Linux).
Figure II.6 Architecture interne de la carte Arduino Mega
- 29 -
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
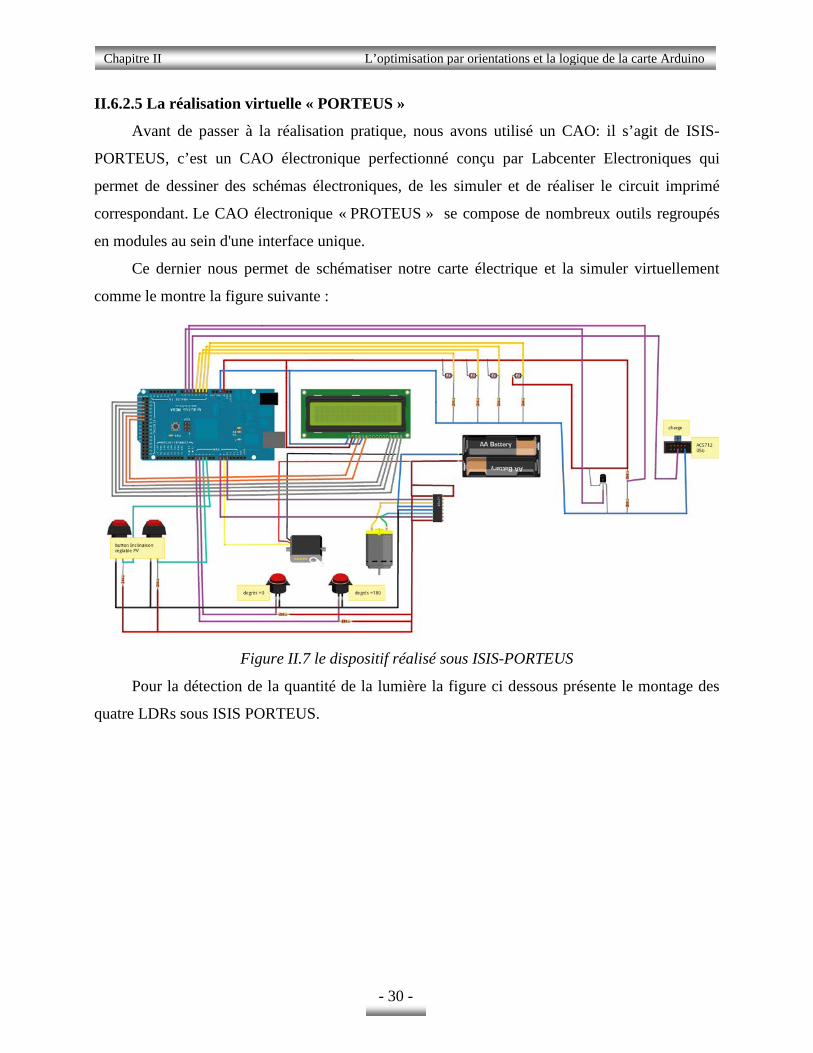
II.6.2.5 La réalisation virtuelle « PORTEUS »
Avant de passer à la réalisation pratique, nous avons utilisé un CAO: il s’agit de ISIS-
PORTEUS, c’est un CAO électronique perfectionné conçu par Labcenter Electroniques qui
permet de dessiner des schémas électroniques, de les simuler et de réaliser le circuit imprimé
correspondant. Le CAO électronique « PROTEUS » se compose de nombreux outils regroupés
en modules au sein d'une interface unique.
Ce dernier nous permet de schématiser notre carte électrique et la simuler virtuellement
comme le montre la figure suivante :
Figure II.7 le dispositif réalisé sous ISIS-PORTEUS
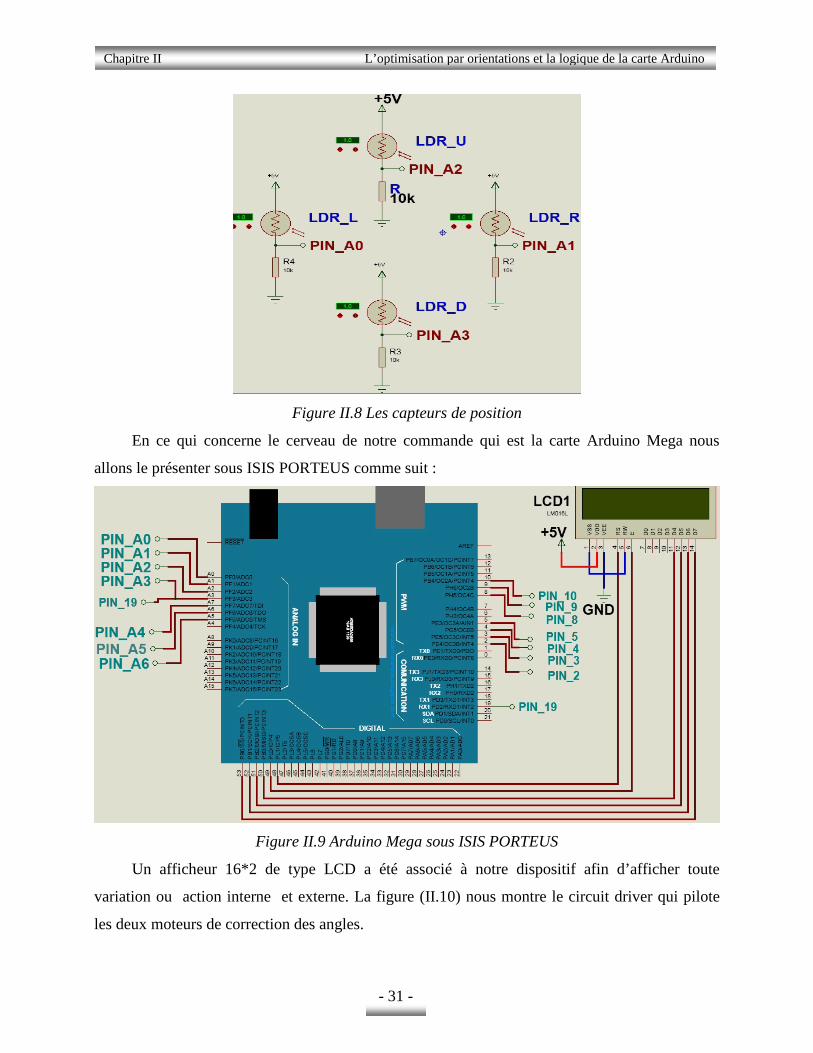
Pour la détection de la quantité de la lumière la figure ci dessous présente le montage des
quatre LDRs sous ISIS PORTEUS.
- 30 -
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
Figure II.8 Les capteurs de position
En ce qui concerne le cerveau de notre commande qui est la carte Arduino Mega nous
allons le présenter sous ISIS PORTEUS comme suit :
Figure II.9 Arduino Mega sous ISIS PORTEUS
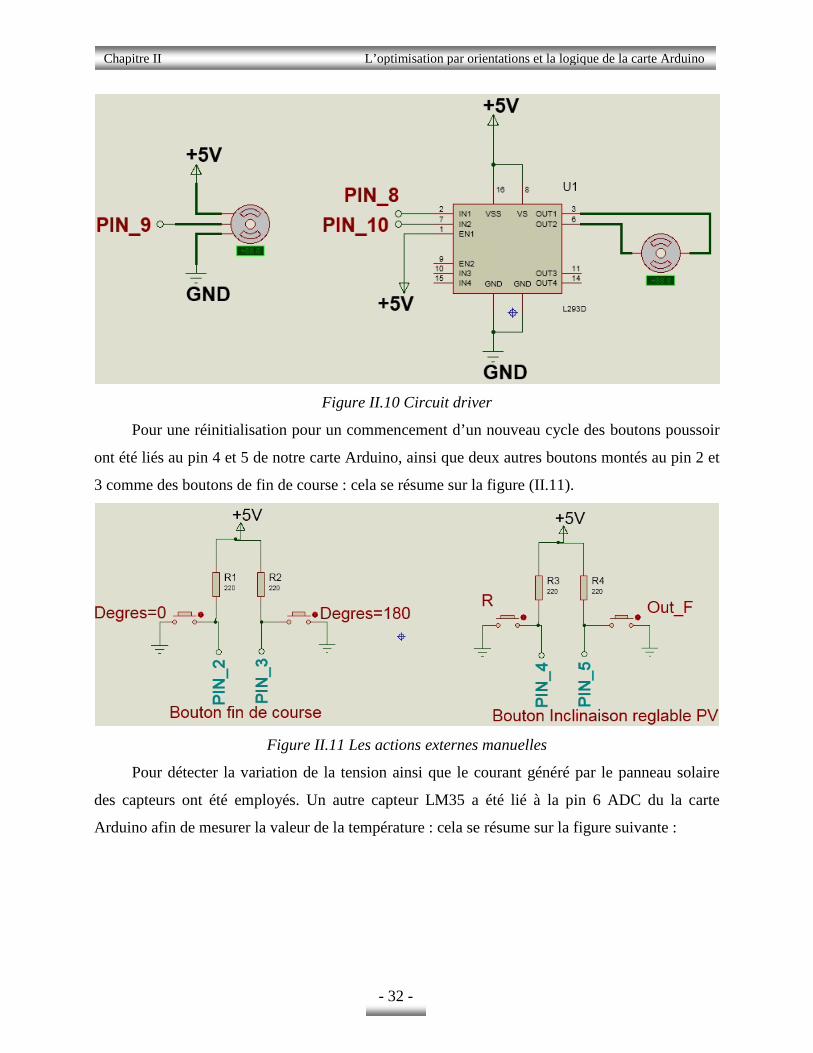
Un afficheur 16*2 de type LCD a été associé à notre dispositif afin d’afficher toute
variation ou action interne et externe. La figure (II.10) nous montre le circuit driver qui pilote
les deux moteurs de correction des angles.
- 31 -
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
Figure II.10 Circuit driver
Pour une réinitialisation pour un commencement d’un nouveau cycle des boutons poussoir
ont été liés au pin 4 et 5 de notre carte Arduino, ainsi que deux autres boutons montés au pin 2 et
3 comme des boutons de fin de course : cela se résume sur la figure (II.11).
Figure II.11 Les actions externes manuelles
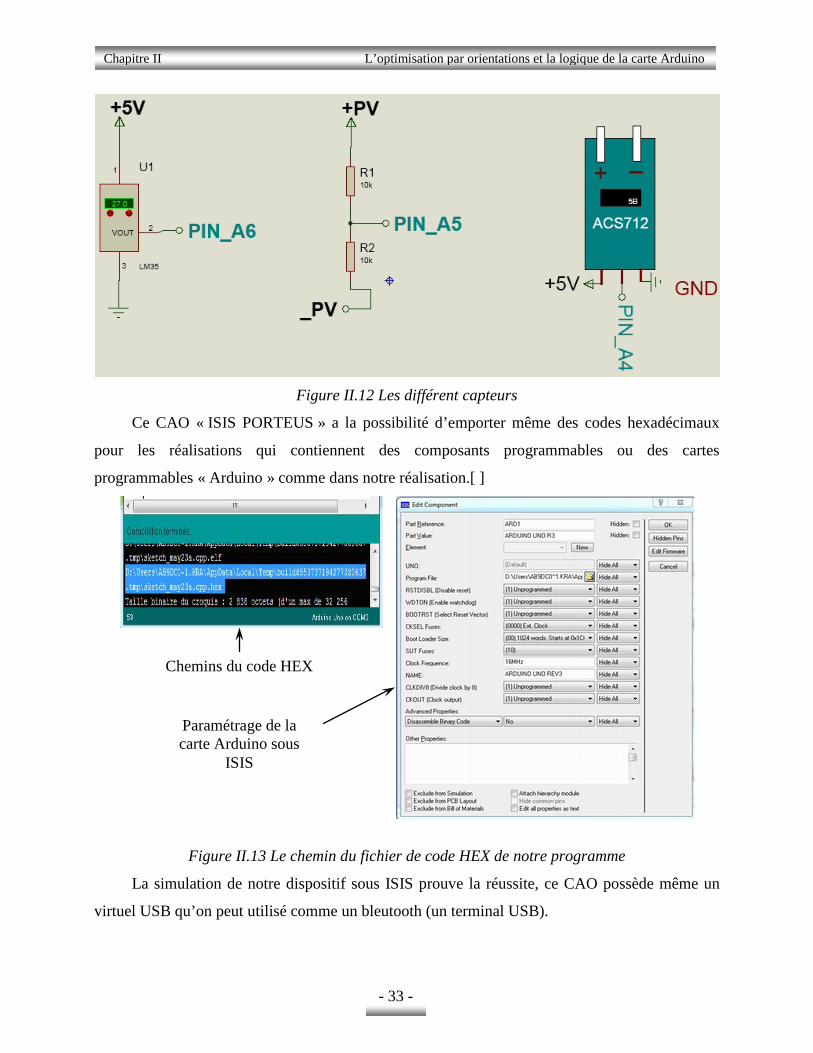
Pour détecter la variation de la tension ainsi que le courant généré par le panneau solaire
des capteurs ont été employés. Un autre capteur LM35 a été lié à la pin 6 ADC du la carte
Arduino afin de mesurer la valeur de la température : cela se résume sur la figure suivante :
- 32 -
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
Figure II.12 Les différent capteurs
Ce CAO « ISIS PORTEUS » a la possibilité d’emporter même des codes hexadécimaux
pour les réalisations qui contiennent des composants programmables ou des cartes
programmables « Arduino » comme dans notre réalisation.[ ]
Figure II.13 Le chemin du fichier de code HEX de notre programme
La simulation de notre dispositif sous ISIS prouve la réussite, ce CAO possède même un
virtuel USB qu’on peut utilisé comme un bleutooth (un terminal USB).
Chemins du code HEX
Paramétrage de la carte Arduino sous
ISIS
- 33 -
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
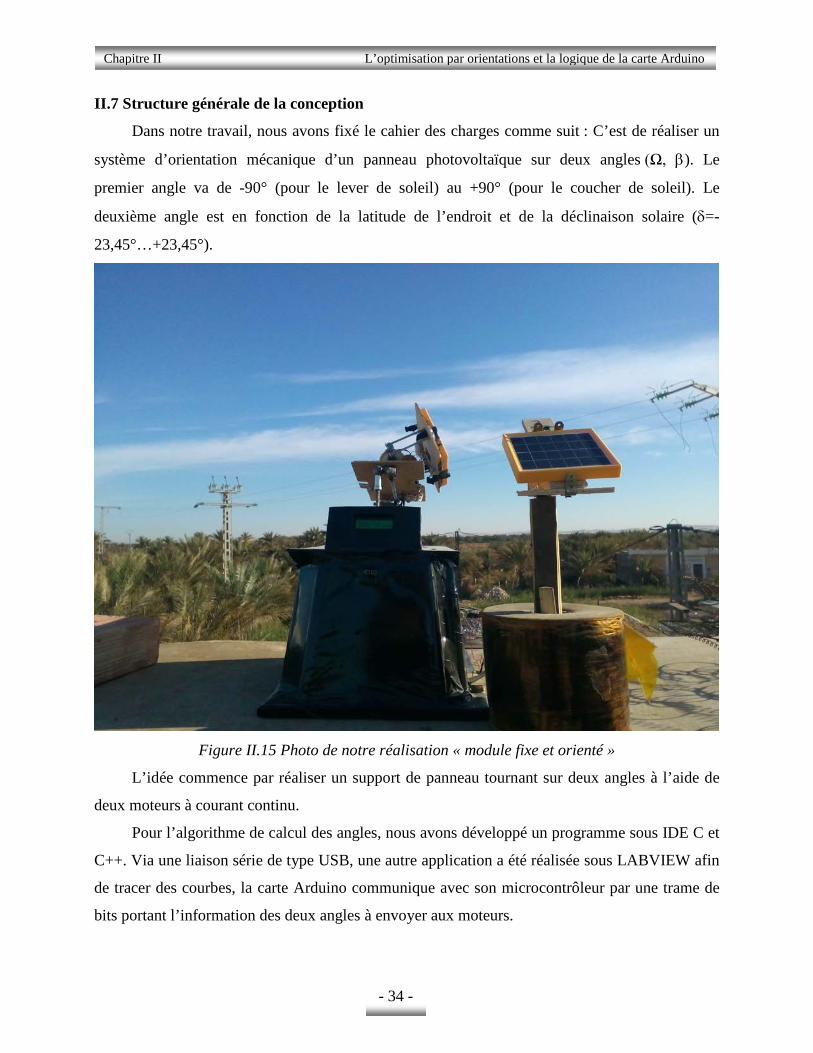
II.7 Structure générale de la conception
Dans notre travail, nous avons fixé le cahier des charges comme suit : C’est de réaliser un
système d’orientation mécanique d’un panneau photovoltaïque sur deux angles (Ω, β). Le
premier angle va de -90° (pour le lever de soleil) au +90° (pour le coucher de soleil). Le
deuxième angle est en fonction de la latitude de l’endroit et de la déclinaison solaire (δ=-
23,45°…+23,45°).
Figure II.15 Photo de notre réalisation « module fixe et orienté »
L’idée commence par réaliser un support de panneau tournant sur deux angles à l’aide de
deux moteurs à courant continu.
Pour l’algorithme de calcul des angles, nous avons développé un programme sous IDE C et
C++. Via une liaison série de type USB, une autre application a été réalisée sous LABVIEW afin
de tracer des courbes, la carte Arduino communique avec son microcontrôleur par une trame de
bits portant l’information des deux angles à envoyer aux moteurs.
- 34 -
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
A l’aide de quatre LDRs on détecte la direction à suivre, les deux moteurs peuvent prendre
n’importe quel angle pour n’importe quel sens de rotation.
L’application LABVIEW peut servir à l’affichage en temps réel des grandeurs mesurées
(courant, tension, éclairement température). La figure (III.7) représente la plateforme complète de
notre application réalisée sous LABVIEW.
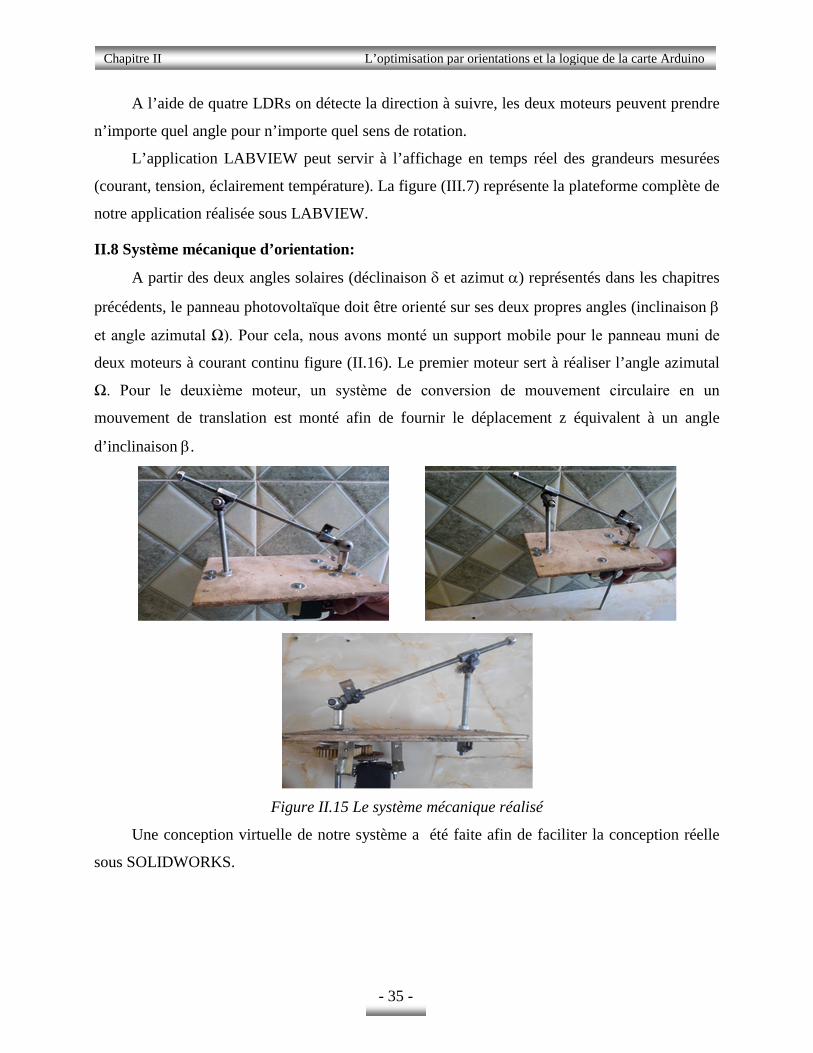
II.8 Système mécanique d’orientation:
A partir des deux angles solaires (déclinaison δ et azimut α) représentés dans les chapitres
précédents, le panneau photovoltaïque doit être orienté sur ses deux propres angles (inclinaison β
et angle azimutal Ω). Pour cela, nous avons monté un support mobile pour le panneau muni de
deux moteurs à courant continu figure (II.16). Le premier moteur sert à réaliser l’angle azimutal
Ω. Pour le deuxième moteur, un système de conversion de mouvement circulaire en un
mouvement de translation est monté afin de fournir le déplacement z équivalent à un angle
d’inclinaison β.
Figure II.15 Le système mécanique réalisé
Une conception virtuelle de notre système a été faite afin de faciliter la conception réelle
sous SOLIDWORKS.
- 35 -
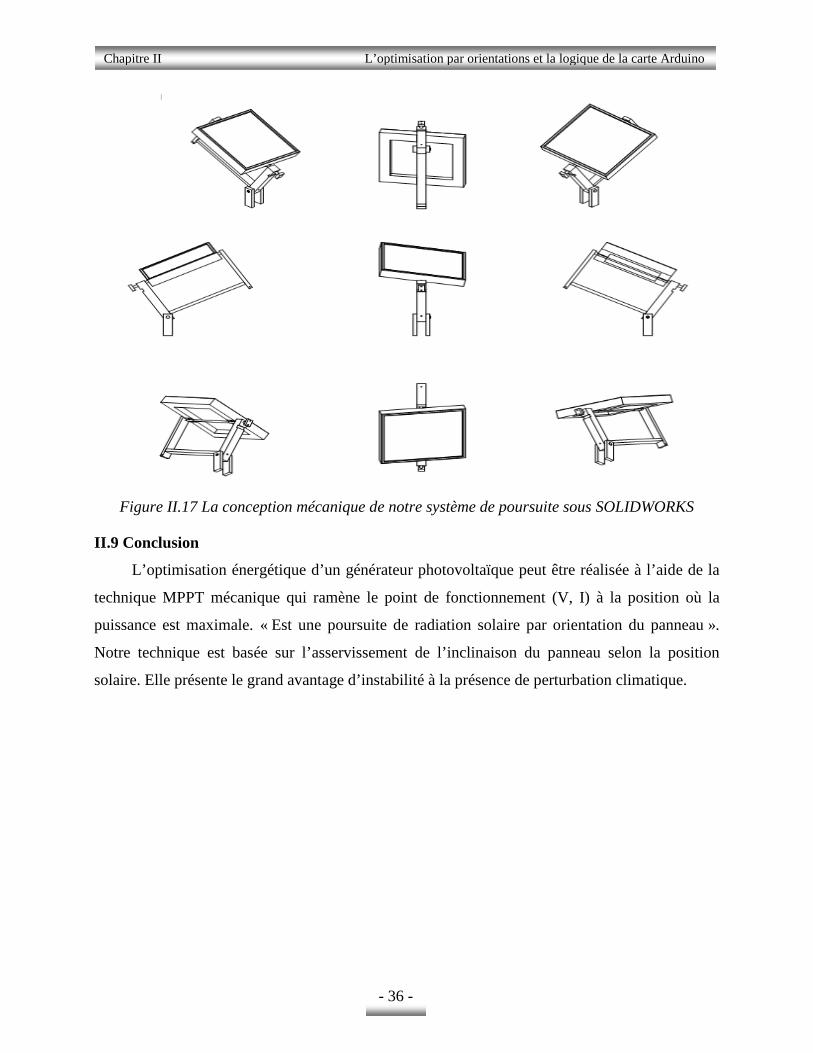
Chapitre II L’optimisation par orientations et la logique de la carte Arduino
Figure II.17 La conception mécanique de notre système de poursuite sous SOLIDWORKS
II.9 Conclusion
L’optimisation énergétique d’un générateur photovoltaïque peut être réalisée à l’aide de la
technique MPPT mécanique qui ramène le point de fonctionnement (V, I) à la position où la
puissance est maximale. « Est une poursuite de radiation solaire par orientation du panneau ».
Notre technique est basée sur l’asservissement de l’inclinaison du panneau selon la position
solaire. Elle présente le grand avantage d’instabilité à la présence de perturbation climatique.
- 36 -
Chapitre III
Développement software
et essais expérimentaux
Chapitre III Développement software et essais expérimentaux
III.1 Introduction
Notre choix pour l’optimisation énergétique d’un PV est un système électromécanique
d’orientation du panneau sur ses deux angles spatiaux. Ces derniers sont calculés à partir d’un
algorithme qui prend en considération les deux angles solaires (déclinaison et azimut). Dans ce
chapitre, nous allons procéder aux différentes phases de programmation, calcul et
dimensionnement.
La plate-forme Arduino apporte tout cela au consommateur, mais surtout, elle affranchit
aux développeurs de nombreuses contraintes. Par son ouverture; elle permet à n’importe quel
développeur de créer ses applications avec un ticket d’entrée quasi nul.
Cette partie de notre étude ne nous donnera pas de bons résultats si on néglige certains
paramètres ; donc le bon fonctionnement de notre système se base essentiellement sur une bonne
démarche et une bonne réflexion de notre programme.
III.2 Les types de programmation
Du premier et du second chapitre, on peut combiner que notre réalisation software a besoin
de deux étapes : la première consiste à un programme qui va s’injecter aux microcontrôleurs de la
carte Arduino après avoir été convertie par le IDE en code HEX et la deuxième à un programme
qui va se manipuler sous LABVIEW afin d’afficher et tracer les différentes valeurs mesurées par
les capteurs tel que (I, V, E, T).
III.2.1 Présentation de l’organigramme IDE
L'organigramme est une représentation schématique des liens fonctionnels, organisationnels
et hiérarchiques d'un organisme d'un programme. Il se doit de posséder une référence
documentaire.
III.2.1.1 Organigramme Arduino Mega
Avant de passer à la programmation, nous devons réaliser un organigramme qui explique le
déroulement des différentes séquences, tant intérieures qu’extérieures : il comportera plusieurs
boucles dont la fin d’exécution succède toujours à son commencement.
- 37 -
Chapitre III Développement software et essais expérimentaux
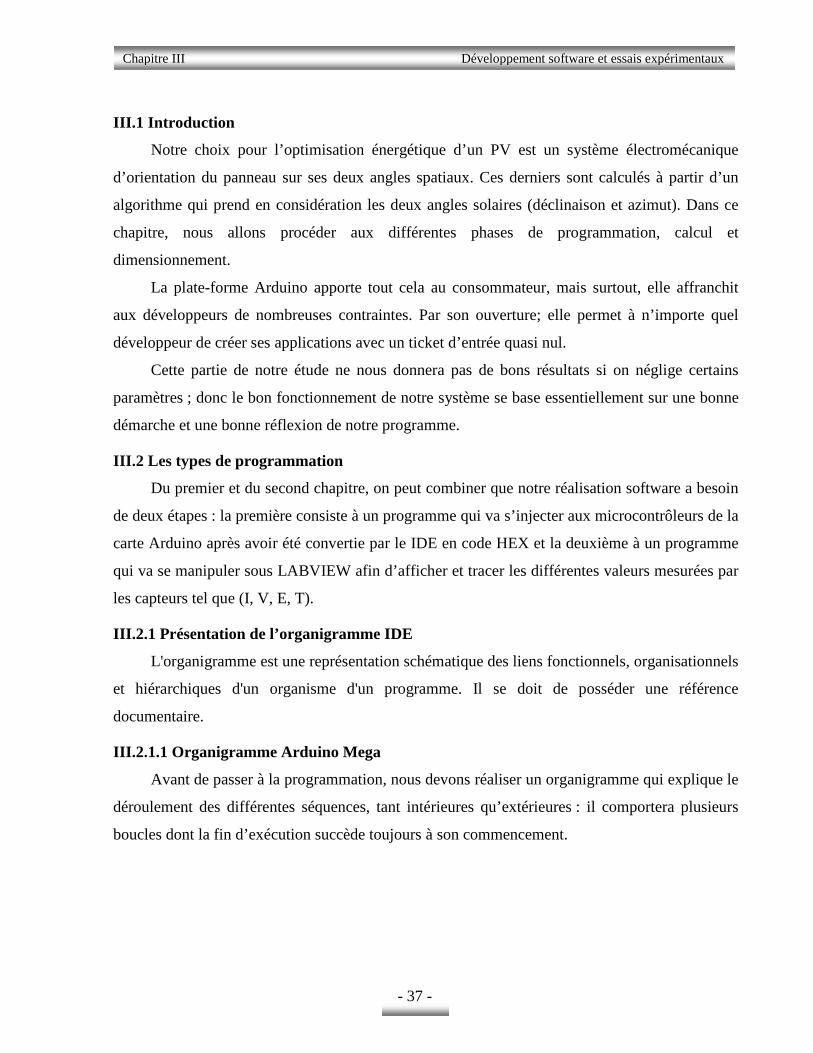
Le programme principal
Pour faciliter la présentation de notre Organigramme nous avons divisé en cinq parties
(organigramme principal, A, B, C et D) comme suit :
Figure III.1 Organigramme principal
Chaque action est symbolisée par un rectangle et chaque test est symbolisé par un losange.
START
Initialisation du programme
Contrôle de lever du soleil
Positionnement du système
Suiveur du soleil
Contrôle de l’action coucher du soleil
- 38 -
Chapitre III Développement software et essais expérimentaux
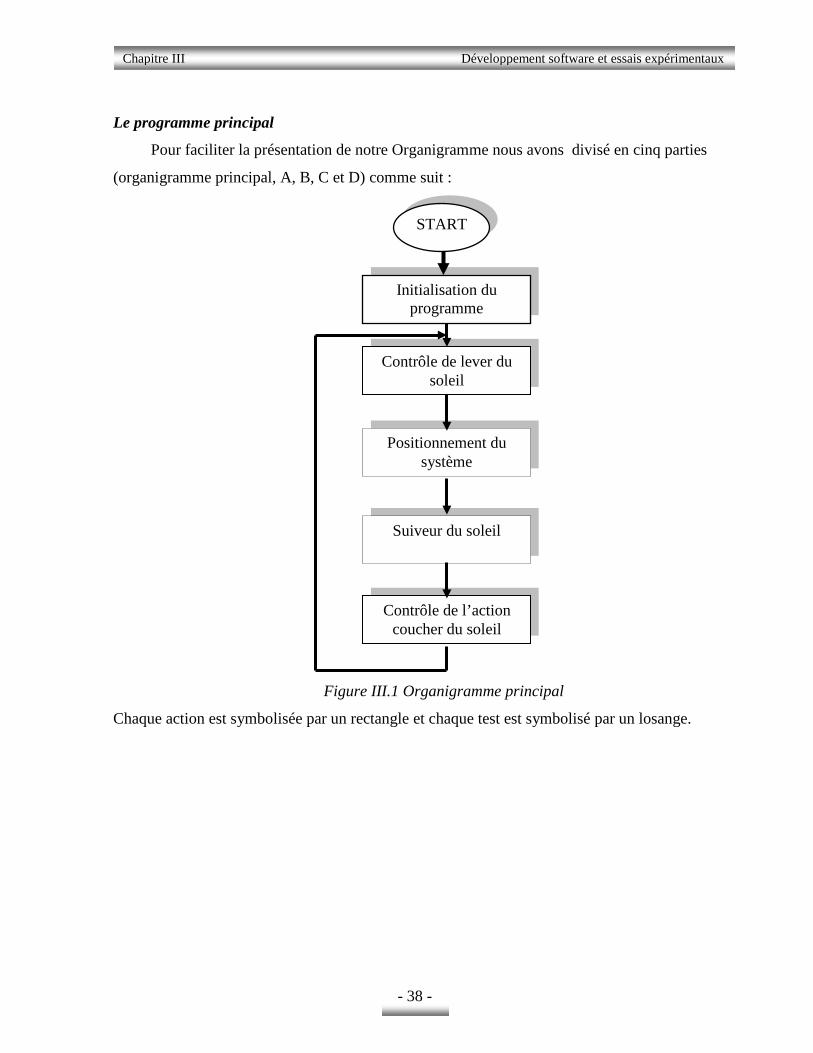
A) Contrôle du lever du soleil par la mesure des quatre LDRs:
Figure III.2 L'organigramme A « lever de soleil »
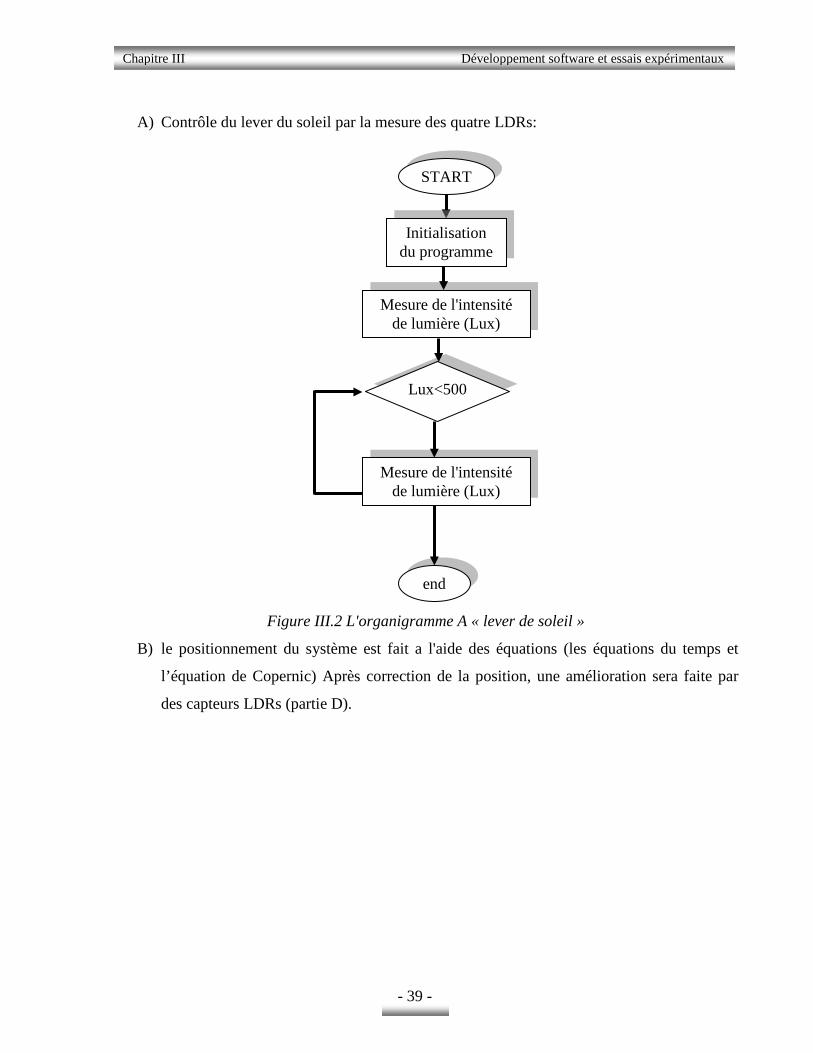
B) le positionnement du système est fait a l'aide des équations (les équations du temps et
l’équation de Copernic) Après correction de la position, une amélioration sera faite par
des capteurs LDRs (partie D).
START
Initialisation du programme
Mesure de l'intensité de lumière (Lux)
Lux<500
Mesure de l'intensité de lumière (Lux)
end
- 39 -
Chapitre III Développement software et essais expérimentaux
Figure III.3 Organigramme B l'axe horizontal X
Axe x ne bouge pas
START
Initialisation du programme
Angle=l'équation de Copernic
Position=-Min Angle-Angle Min Angle=Angle
Position =0
Position = 1
Axe x ++
Position = -1
Axe x --
LDRR>LDRL &Angle<23
Amélioration Axe ++
LDRL>LDRR &Angle>-23
Amélioration Axe --
OUI
NO
end
OUI
OUI
NO
NO
OUI NO
NO
OUI
- 40 -
Chapitre III Développement software et essais expérimentaux
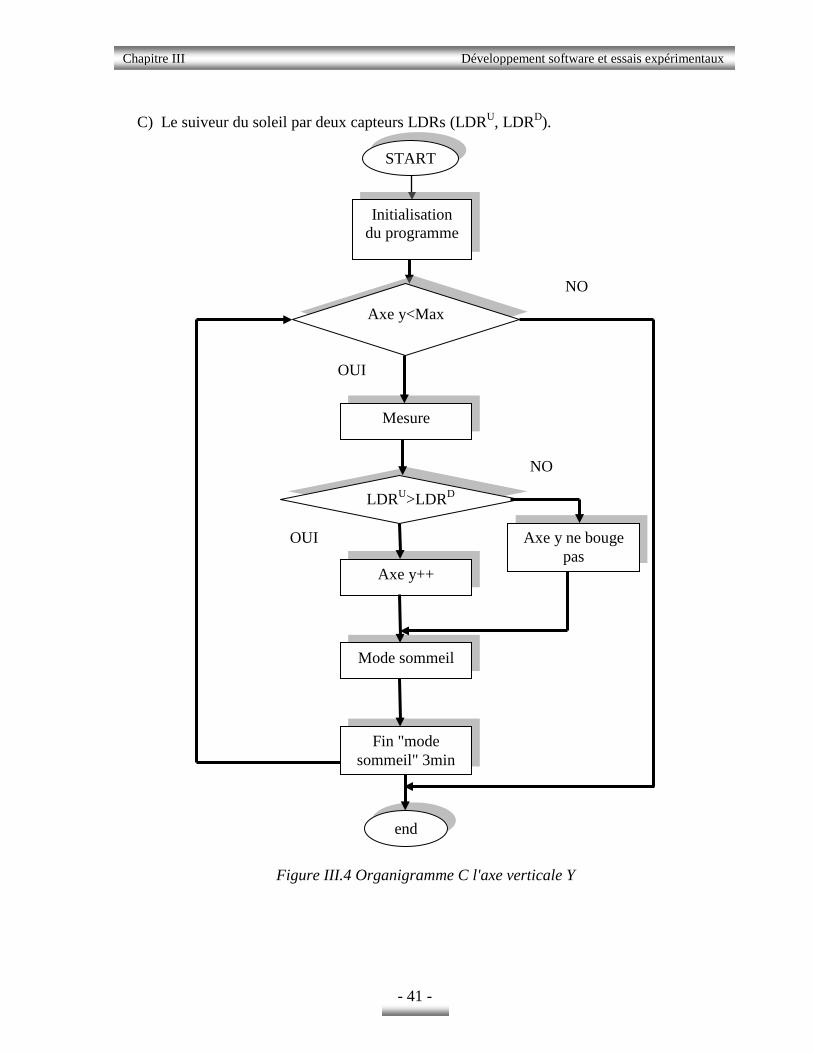
C) Le suiveur du soleil par deux capteurs LDRs (LDRU, LDRD).
Figure III.4 Organigramme C l'axe verticale Y
START
Initialisation du programme
Mesure
LDRU>LDRD
Axe y ne bouge pas
Axe y++
Mode sommeil
Fin "mode sommeil" 3min
Axe y<Max
NO
OUI
end
OUI
NO
- 41 -
Chapitre III Développement software et essais expérimentaux
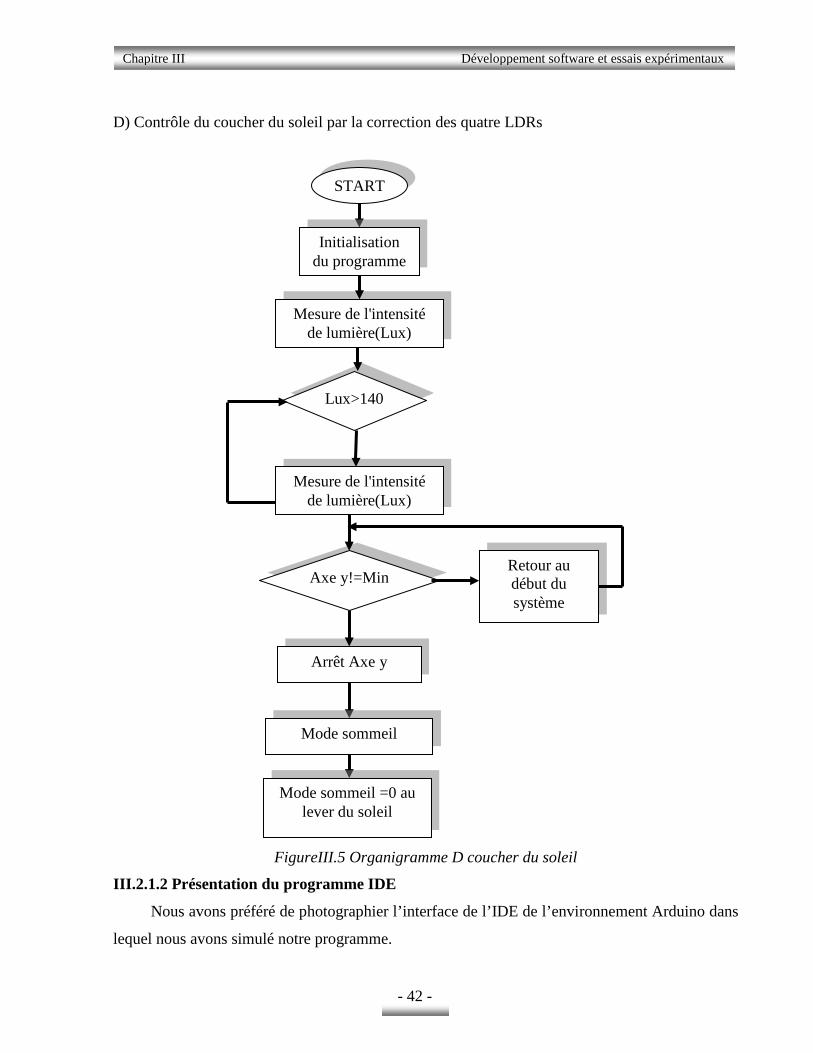
D) Contrôle du coucher du soleil par la correction des quatre LDRs
FigureIII.5 Organigramme D coucher du soleil
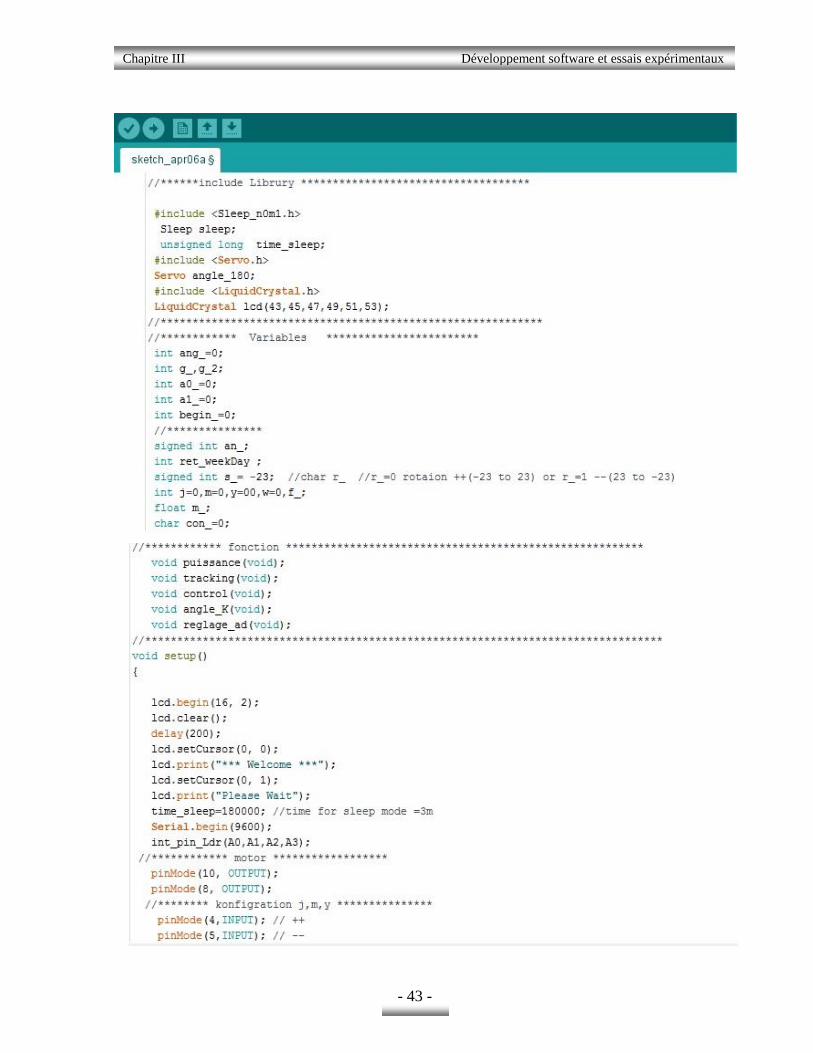
III.2.1.2 Présentation du programme IDE
Nous avons préféré de photographier l’interface de l’IDE de l’environnement Arduino dans
lequel nous avons simulé notre programme.
START
Initialisation du programme
Mesure de l'intensité de lumière(Lux)
Lux>140
Mesure de l'intensité de lumière(Lux)
Retour au début du système
Arrêt Axe y
Axe y!=Min
Mode sommeil
Mode sommeil =0 au lever du soleil
- 42 -
Chapitre III Développement software et essais expérimentaux
- 43 -
Chapitre III Développement software et essais expérimentaux
- 44 -
Chapitre III Développement software et essais expérimentaux
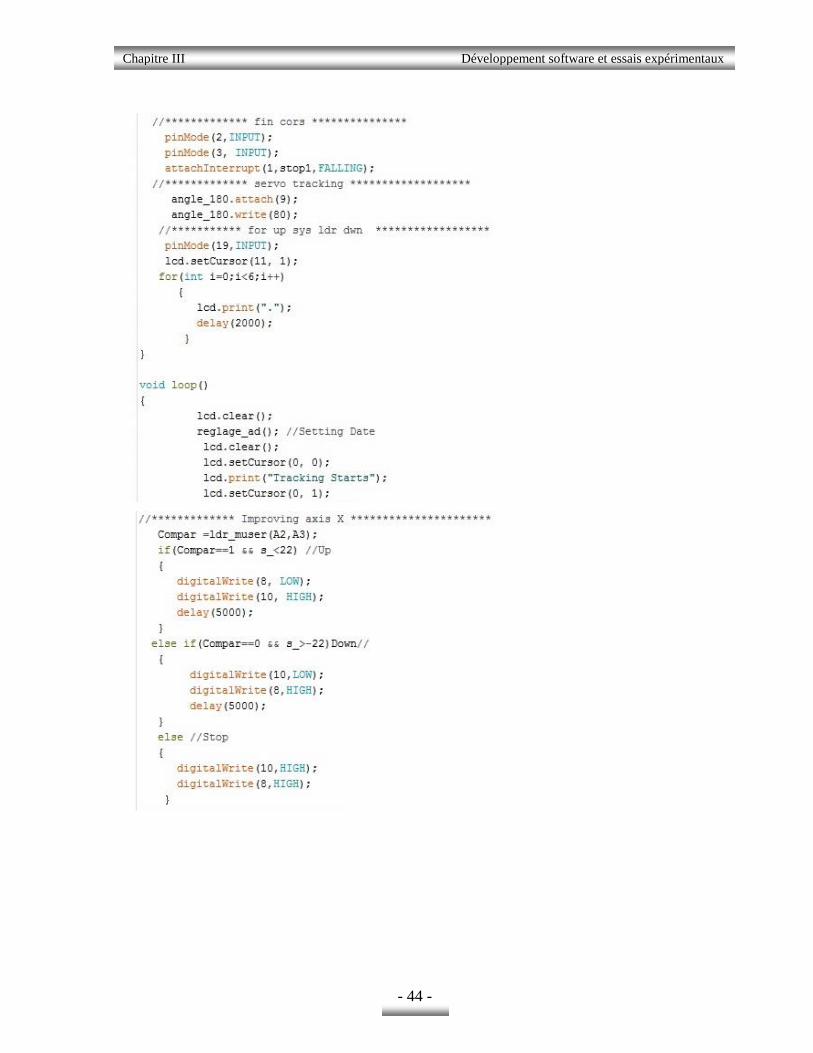
Figure III.6 Présentation graphique du programme
III.2.1.3 Explication du programme
La méthode de travail du projet est principalement dépendante du langage de machine qui
convient pour le travail du projet et d'accroître la connaissance et la profondeur des langages de
programmation.
On commence par la programmation du microcontrôleur situé sur l’Arduino ; au début, on
déclare toutes les variables utilisées ; après, on initialise les ports du l’Arduino comme des sorties
« OUTPUTS », ensuite ; on appelle le sous programme de temporisation déjà situé sous le
compilateur IDE.
A La première partie : traitement de l'angle d'inclinaison de PV
Cette section dépend principalement de la formule de Copernic qui détermine l'angle
d'inclinaison PV « angle du lever du soleil », après correction, la carte Arduino entre en mode
sommeil et elle ne retourne pas à cette équation jusqu’au prochain cycle « lever du soleil ».
B Partie deux : échappés pour le lever du soleil
- 45 -
Chapitre III Développement software et essais expérimentaux
Le but de cette partie est la fixation du PV au point de départ et ne peut pas se déplacer
vers d'autres parties mais après vérification des conditions :
• lever du soleil
• l'intensité de la lumière plus ou égale à 500
Partie trois : vise à améliorer l'angle d'inclinaison de PV
Cette partie dépend principalement de l’LDRs où nous mesurons l'intensité de la lumière
pour chacune des LDR droit et LDR gauche ; ensuite la correction se fait vers la tendance de
LDRs.
Partie quatre : fonctionnement du suivit du soleil
Cette partie dépend principalement de l’LDR où nous mesurons l'intensité de la lumière
pour chacune de LDR supérieur et LDR bas.
LDR supérieur > LDR bas : PV étape de déplacement de 1 degré de l'horloge ;
LDR supérieur <= LDR bas : PV aucun mouvement.
Remesurer le processus à nouveau après trois minutes et demie et insérér Arduino au mode
sommeil pendant ce temps avant de re-mesurer à nouveau.
Partie cinq : fonctionnement sur confirmation du coucher du soleil et renouvellement du
début du démarrage du PV
Après l'arrivée de PV à tout point de terminaison pour terminer le 180 degrés la
connaissance de la pièce par bouton fin de course PV reste dans le point final jusqu'à ce que la
valeur de l'intensité de la lumière devienne inférieure à 25 PV puis retour au point de départ Il
fait un mouvement continu dans le sens contraire de l'horloge, la connaissance du PV au point de
départ par le bouton fin de course.
Remarque: les rayons solaires prennent huit minutes durant chaque déplacement, nous avons
exploité trois minutes et demie, c'est un moyen arithmétique entre le jour le plus long et le plus
court de l'année.
Partie six : fonctionnement sur mesure
Ceci est en partie mesurée I, V, P, Rend de PV et Lux Cette partie a été utilisée dans chacun
des 2, 4 et 5 pin de notre carte.
La détermination de la valeur de l'intensité lumineuse au lever et au coucher du soleil est de
500 lux pratiquement.
- 46 -
Chapitre III Développement software et essais expérimentaux
III.2.2 l'interface LABVIEW
LABVIEW pour Laboratory Virtual Instrumentation Engineering Workbench est un
environnement de développement en langage G. Notons que l’on écrit LABVIEW et non pas
LABVIEW ou LABVIEW, etc. Il a été créé en 1986, initialement pour Apple Macintosh, qui
était à l’époque l’un des seuls ordinateurs proposant une interface graphique native. L’histoire de
LABVIEW explique un vocabulaire spécifique, et explique encore certaines actions. A l’origine,
LABVIEW s’exécute sur des écrans noirs et blancs, puis sur des écrans 16 couleurs, 256, etc.
LABVIEW est un environnement de développement propriétaire (par opposition à un
environnement ouvert, permettant à plusieurs personnes de développer des compilateurs
compatibles, comme pour C/C++, Ada, Java, Fortran, etc.) développé et vendu par la société
National Instruments (NI). Le premier métier de NI est de fabriquer du matériel d’acquisition
(notamment sur le protocole GPIB au début des années 80) rapidement destiné au marché des
micro-ordinateurs (IBM PC, Apple Macintosh). Ainsi, la première version de LABVIEW
s’attache à offrir un environnement de développement dont le rôle est de permettre simplement à
l’utilisateur de créer des instruments virtuels (virtual instrument, ou vi) utilisant le matériel
d’acquisition NI pour reproduire sur un micro-ordinateur le comportement d’un instrument
personnalisé et personnalisable à volonté. [6]
Figure III.7 L’interface graphique LABVIEW de notre application
- 47 -
Chapitre III Développement software et essais expérimentaux
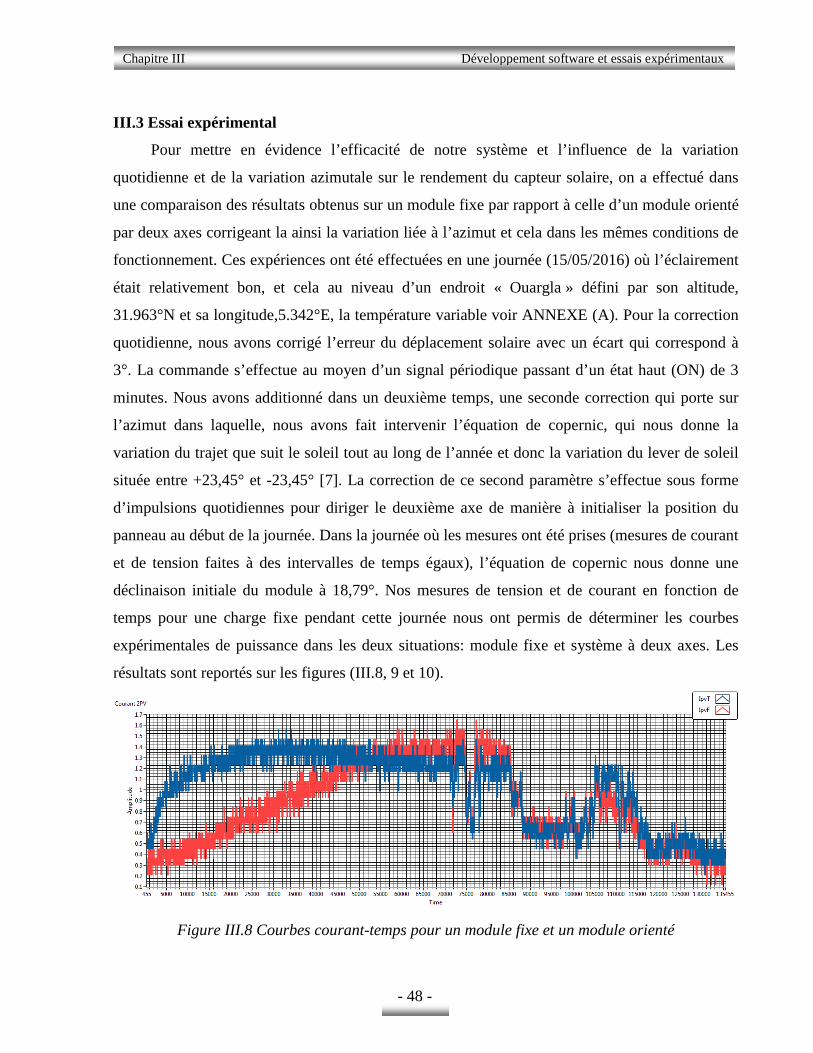
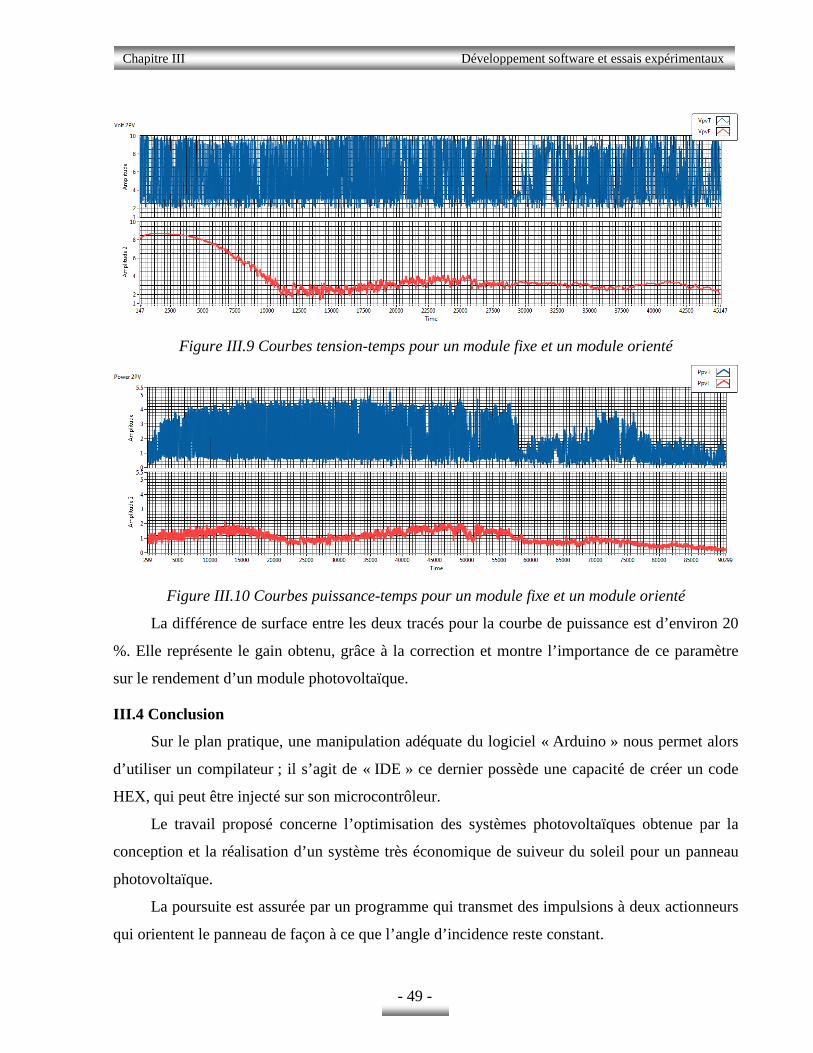
III.3 Essai expérimental
Pour mettre en évidence l’efficacité de notre système et l’influence de la variation
quotidienne et de la variation azimutale sur le rendement du capteur solaire, on a effectué dans
une comparaison des résultats obtenus sur un module fixe par rapport à celle d’un module orienté
par deux axes corrigeant la ainsi la variation liée à l’azimut et cela dans les mêmes conditions de
fonctionnement. Ces expériences ont été effectuées en une journée (15/05/2016) où l’éclairement
était relativement bon, et cela au niveau d’un endroit « Ouargla » défini par son altitude,
31.963°N et sa longitude,5.342°E, la température variable voir ANNEXE (A). Pour la correction
quotidienne, nous avons corrigé l’erreur du déplacement solaire avec un écart qui correspond à
3°. La commande s’effectue au moyen d’un signal périodique passant d’un état haut (ON) de 3
minutes. Nous avons additionné dans un deuxième temps, une seconde correction qui porte sur
l’azimut dans laquelle, nous avons fait intervenir l’équation de copernic, qui nous donne la
variation du trajet que suit le soleil tout au long de l’année et donc la variation du lever de soleil
située entre +23,45° et -23,45° [7]. La correction de ce second paramètre s’effectue sous forme
d’impulsions quotidiennes pour diriger le deuxième axe de manière à initialiser la position du
panneau au début de la journée. Dans la journée où les mesures ont été prises (mesures de courant
et de tension faites à des intervalles de temps égaux), l’équation de copernic nous donne une
déclinaison initiale du module à 18,79°. Nos mesures de tension et de courant en fonction de
temps pour une charge fixe pendant cette journée nous ont permis de déterminer les courbes
expérimentales de puissance dans les deux situations: module fixe et système à deux axes. Les
résultats sont reportés sur les figures (III.8, 9 et 10).
Figure III.8 Courbes courant-temps pour un module fixe et un module orienté
- 48 -
Chapitre III Développement software et essais expérimentaux
Figure III.9 Courbes tension-temps pour un module fixe et un module orienté
Figure III.10 Courbes puissance-temps pour un module fixe et un module orienté
La différence de surface entre les deux tracés pour la courbe de puissance est d’environ 20
%. Elle représente le gain obtenu, grâce à la correction et montre l’importance de ce paramètre
sur le rendement d’un module photovoltaïque.
III.4 Conclusion
Sur le plan pratique, une manipulation adéquate du logiciel « Arduino » nous permet alors
d’utiliser un compilateur ; il s’agit de « IDE » ce dernier possède une capacité de créer un code
HEX, qui peut être injecté sur son microcontrôleur.
Le travail proposé concerne l’optimisation des systèmes photovoltaïques obtenue par la
conception et la réalisation d’un système très économique de suiveur du soleil pour un panneau
photovoltaïque.
La poursuite est assurée par un programme qui transmet des impulsions à deux actionneurs
qui orientent le panneau de façon à ce que l’angle d’incidence reste constant.
- 49 -
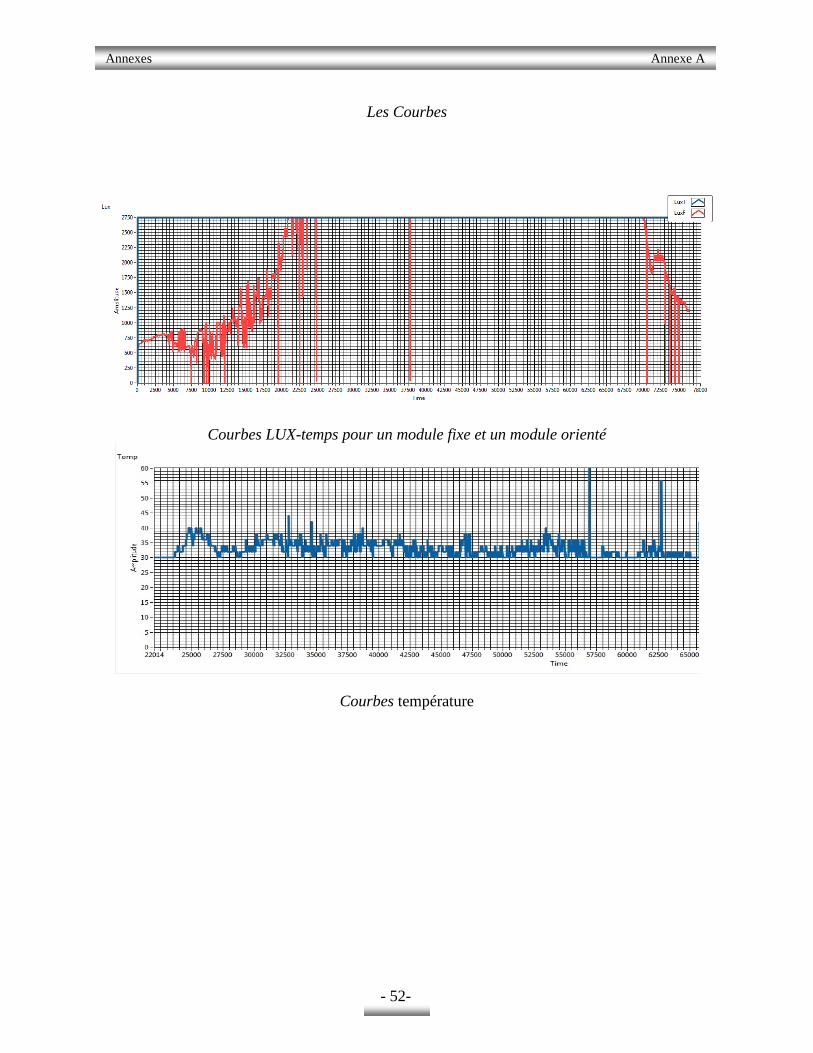
Annexes Annexe A
Les Courbes
Courbes LUX-temps pour un module fixe et un module orienté
Courbes température
- 52-

Annexes Annexe B
Photo de la réalisation pratique
Début travail
Midi
Fin travail
- 53 -
Annexes Annexe C
Les Logiciels Utilisés
Pour programmer arduino
Pour la simulation virtuelle de notre carte
Pour la l’affichage en temps réel des grandeurs mesurées (courant, tension, éclairement température).
Pour La conception en trois dimensions
- 54 -
Annexes Annexe D
:02000004EEE0FA :10000000B2017728A70089100910091083168910FA :10001011091009100F30880583122708B2182D28FF :10001453A30A100FC305E203330A6004120103071 :10003000A1056353088000FF330A100FBCCC0102 :100050002C20B21427082D283214A600321C3B286D :100060000910033C031C402840200730A100D03079 :100070005E20031408003214FE3C03197228091490 :10008000321C321089140F3088052608F039880494 :100090008910A60E3218412832305D200314080062 :1000A000A301A200FF30A207031CA307031C7228B0 :1000B0000330A100DF305E205228A101E83EA000FD :1000C000A109FCC569EEC6728A00703186428A007B7 :1000D0006400A10F642820186D28A01C712800005E :1000E0007128080083130313831264000800831629 :1000F00007309F0083120911831609118312013002 :10010000A3002C308A01512083168101F030860033 :100110008701831286018701FE308A0102208F3019 :100120008A01022034308A01022096308A01502050 :10013000FE308A0102208E308A01022034308A018A :10014000022058308A01022096308A015020FE3069 :100150008A0102208D308A01022034308A01022077 :1001600058308A01022034308A01022096308A01F8 :100170005020FE308A0102208C308A010220343067 :100180008A01022058308A01022034308A0102207C :1001900020308A01022096308A015020FE308A01E8 :1001A00002208B308A01022034308A01022058302C :1001B0008A01022034308A01022020308A01022084 :100200005020FE308A01022089308A0102203430D9 :100210008A01022058308A01022034308A010220EB :1002200020308A01022043308A0102204C308A01AA :10023000022041308A01022096308A015020FE308F :100240008A01022088308A01022034308A0102208B :1002500058308A01022034308A01022020308A017D :101C500033308A01022020308A01022033308A0189 :101C70008A01022044308A01022020308A01022099 :0A1C8000080063008A150A12412EC5 :02400E007D3FF4 :00000001FF
Le code hexadécimal de notre programme
- 55 -
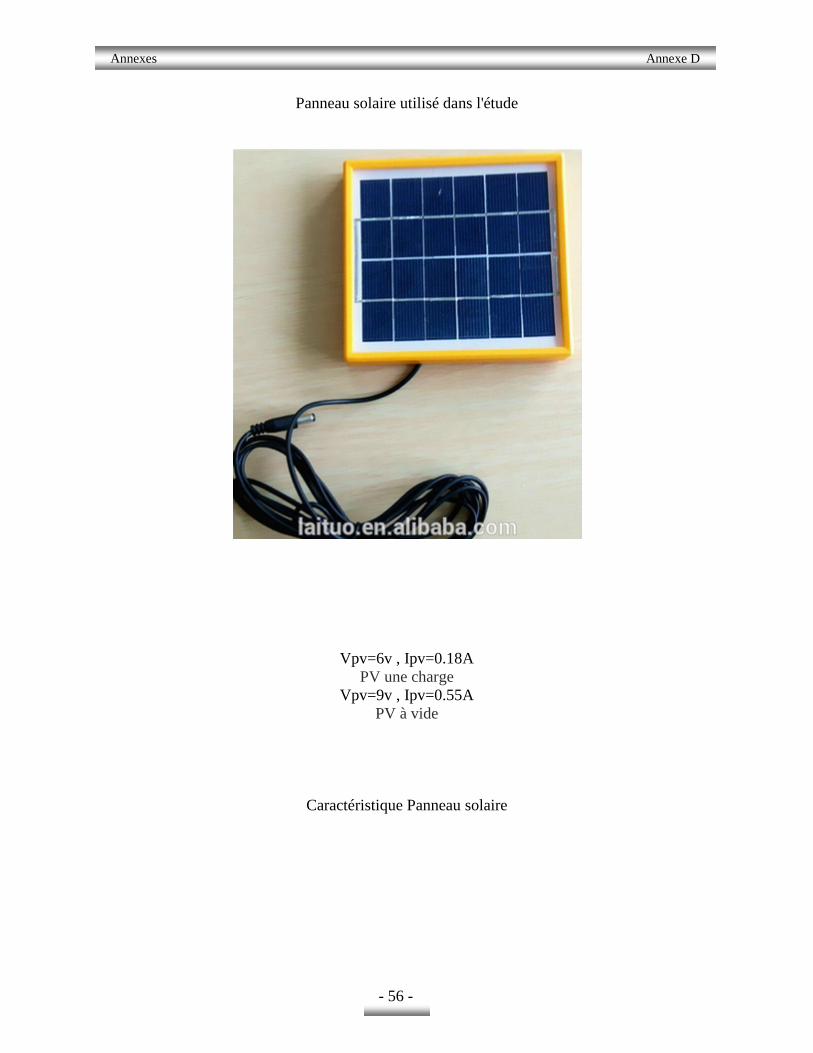
Annexes Annexe D
Panneau solaire utilisé dans l'étude
Vpv=6v , Ipv=0.18A PV une charge
Vpv=9v , Ipv=0.55A PV à vide
Caractéristique Panneau solaire
- 56 -
Bibliographie
Bibliographie
[1] S. Chin, J. Gadson and K. Nordstrom, ‘Nerd Girls, Maximum Power Point Tracker’,
Nerd Girls Solar/MPPT Group May 12, 2003.
[2] M. Haddadi, ‘Elaboration d’une Commande pour Héliostat’, Revue des Energies
Renouvelables, Numéro Spécial, pp. 153 – 157, 2003.
[3] Rezoug.M.R , Zaatri.A , Calcul de la durée optimale d’activité, d’un module
photovoltaïque en fonction de l’endroit Revue des Energies Renouvelables Vol. 14 N°1
(2011) 163 – 169.
[4] A. Vial, ‘Quelques Idées Reçues sur la Position du Soleil’, Bulletin de l’Union des
Physiciens, N° 897, pp. 959 – 980, 2007.
[5] Abdallah ali Abdallah livre 'Simply arduino' .
[6] livre Labview - Basics fr
[7] Rezoug.M.R , Zaatri.A ,Optimisation du rendement d’un système photovoltaïque par
poursuite du soleil Vol. 12 < N° 2, Juin 2009 >.
[8] site officiel de Arduino www.arduino.cc
[9] R. D’Hollander, ‘L’Astrolabe - Histoire, Théorie et Pratique’, Institut Océanographique
Ed, 1999.
[10] otmane benseddik , fathi djaloud,<<etude et optimization du fonctionnement d’un systéme photovltaїque >> mémoire de master ouargla (2011/2012)
- 51 -
Conclusion Générale
1. Généralités
Par la programmation des microcontrôleur spécialement la carte Arduino, nous avons
implanté un mode de contrôle qui permet d’assurer un suivi très précis du soleil d’un panneau
photovoltaïque ; cependant, la précision des capteurs varie en fonction du temps atmosphérique.
Nous avons trouvé que le rendement de l’énergie réelle par rapport à l’énergie en
fonctionnement optimal est de 20% pour un panneau solaire fixe dans la région de ouargla.
Le système Arduino est une plateforme open-source d'électronique programmée qui est
basée sur une simple carte à microcontrôleur (de la famille AVR), et un logiciel véritable
environnement de développement intégré, pour écrire, compiler et transférer le programme vers
la carte à microcontrôleur.
L’utilisation la programmation du microcontrôleur AVR exige une connaissance en langage
« C » comme soft et la maîtrise des outils « IDE», afin d’arriver à l’objectif souhaité.
Dans ce travail, un assemblage de plusieurs logiciels est fait afin de réaliser un tel résultat
voir annexe (c ).
2. Problèmes rencontrés
Une telle réalisation n’est pas dénuée de difficultés. Il est à noter que nous nous sommes
confrontés à plusieurs problèmes.
La taille du panneau est réduite d’où, une puissance faible. Si on utilise un panneau de
puissance égale à 100Wp, on obtient une énergie réelle égale à 120W.h ce qui suffit à faire
tourner notre système (mais ne permet pas de récupérer beaucoup d’énergie électrique).
Cependant, on peut dire que malgré ces difficultés, les résultats obtenus à travers cette
étude qu’ils soient pratiques ou théoriques, permettent d’ouvrir la porte à d’autres études.
3. Perspectives du projet
Nous souhaitons vivement que ce projet puisse servir comme élément de base pour d’autres
études plus approfondies pour le faire intégrer sous des systèmes plus complexes.
- 50 -
Résumé
:ملخص في ھذا العمل قمنا بإنجاز نظام مالحقة الشمس للوح شمسي على محورین وذلك باالستعانة بمتحكم من نوع أردوینو
(ATMega 2560) قمنا في ھذا العمل باستعمال المعادالت الوقتیة ألنظمة المالحقة مثل معادلة كوبرنیك باإلضافة إلى ،لواقط ضوئیة وذلك لزیادة الدقة في عمل النظام
،لواقط ضوئیة (ATMega 2560) لوح شمسي ،متحكم أردوینو :الكلمات المفتاحیة Résumé: Dans ce travail, nous avons étudiés et réalisés un système de poursuite pour un panneau solaire à deux axes à l'aide d’un microcontrôleur type Arduino (ATMega 2560), on utilise des équation temporelles pour les systèmes de poursuit telles que l'équation de Copernic, en plus des capteurs
LDR de manière à accroître la précision des travaux du système Mots-clés: panneau solaire, un microcontrôleur Arduino (ATMega 2560), capteurs LDR Abstract: In this work, we have studied and realized a tracking system for a solar panel in two axes using a microcontroller Arduino (ATMega 2560), temporal equation is used for tracking systems such as that equation of Copernic, in addition to LDR sensors to increase the accuracy of the system works Keywords: solar panel, an Arduino microcontroller (ATMega 2560), LDR sensors
- 57 -





























