Embed Size (px)
Citation preview

3 Unit Course, Spring 2002EECS Department, UC Berkeley
Embedded Software Engineering
www.eecs.berkeley.edu/~fresco/giotto/course-2002
Christoph Kirsch
© 2002 C. Kirsch -2-
It’s significant
$4 billion development effort> 50% system integration & validation cost

© 2002 C. Kirsch -3-
It’s tricky
Mars, July 4, 1997Lost contact due to embedded software failure

© 2002 C. Kirsch -4-
It’s risky
French Guyana, June 4, 1996$800 million embedded software failure

© 2002 C. Kirsch -5-
It’s fun
© 2002 C. Kirsch -6-
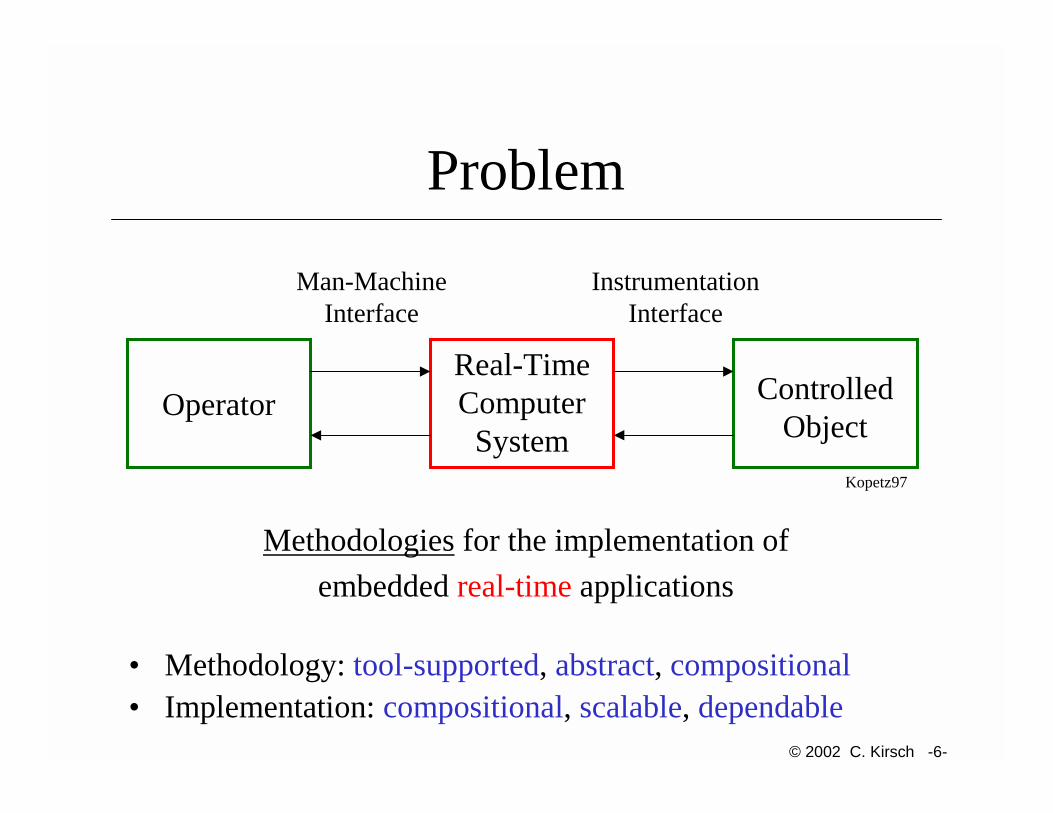
Problem
Real-TimeComputer
System
ControlledObject
Operator
Man-MachineInterface
InstrumentationInterface
Kopetz97
Methodologies for the implementation ofembedded real-time applications
• Methodology: tool-supported, abstract, compositional• Implementation: compositional, scalable, dependable

© 2002 C. Kirsch -7-
Engine Controller
• Temporal accuracy of 3µsec• Up to 100 concurrent software tasks• Hard real-time: no missed deadlines
@ 6000rpm,10ms for 360º
0.1°

© 2002 C. Kirsch -8-
Video Streaming
• 25 frames/sec• Dynamic resource allocation• Soft real-time: degraded QoS
© 2002 C. Kirsch -9-
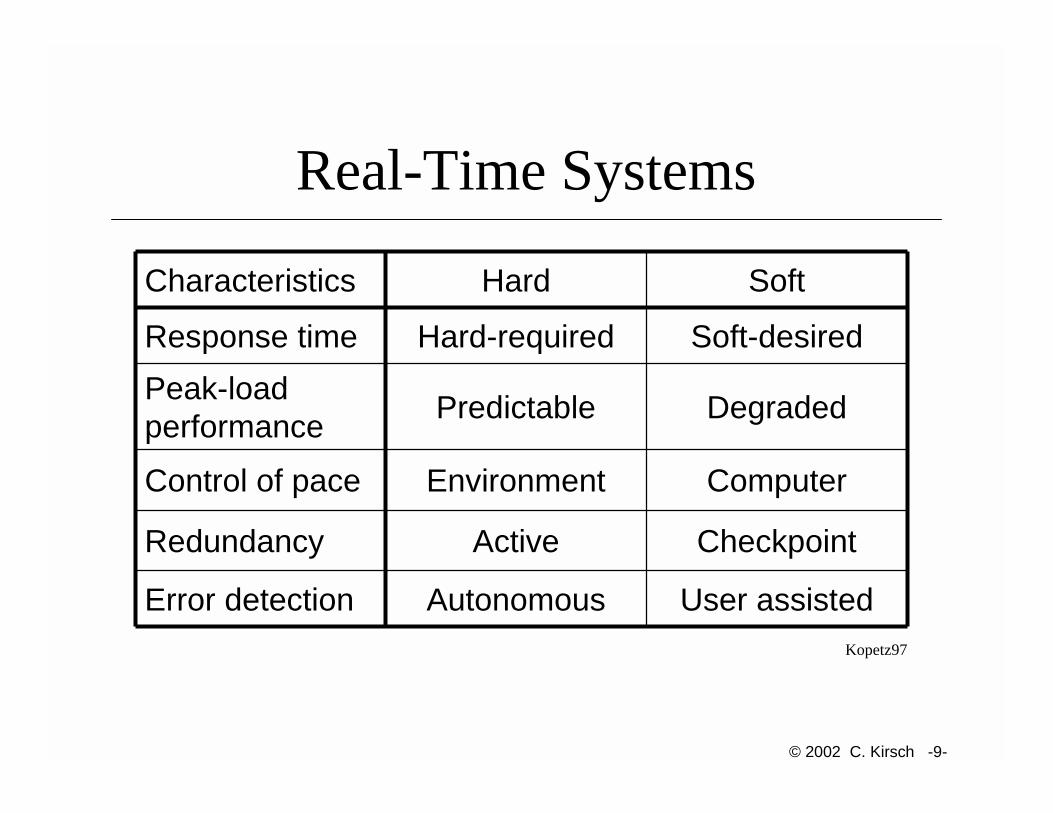
Real-Time Systems
DegradedPredictablePeak-load performance
Soft-desiredHard-requiredResponse time
CheckpointActiveRedundancy
Error detection
Control of pace
Characteristics
User assistedAutonomous
ComputerEnvironment
SoftHard
Kopetz97
© 2002 C. Kirsch -10-
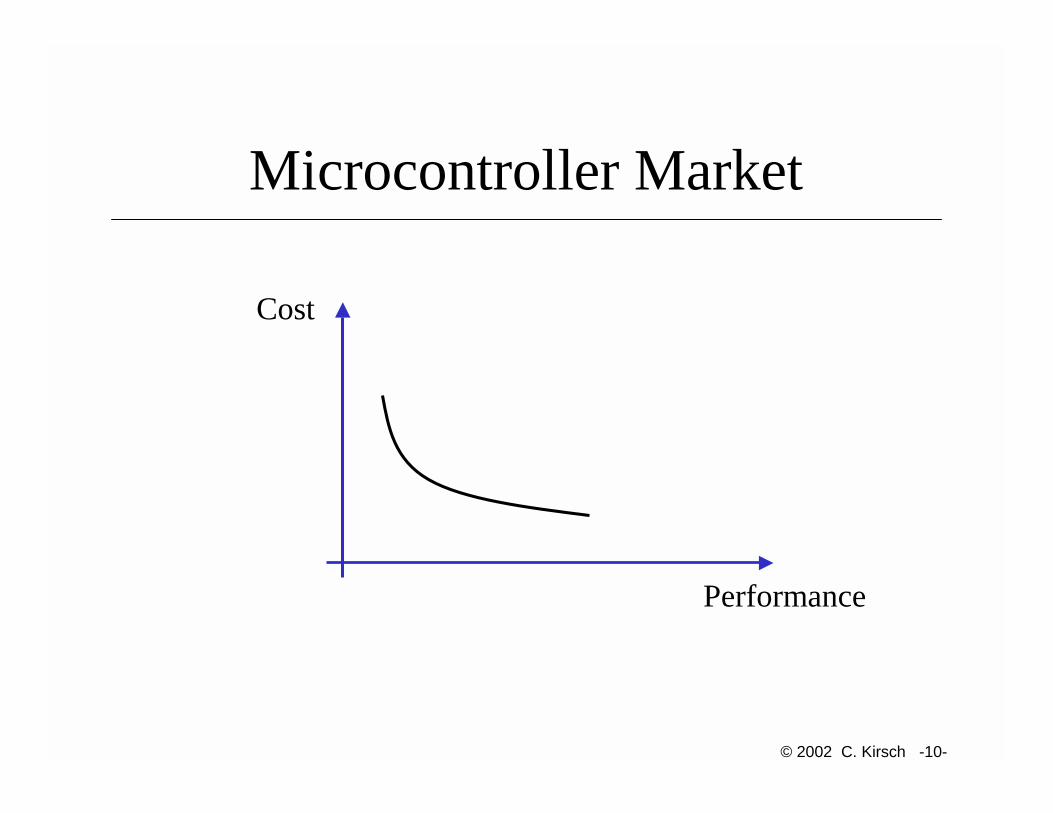
Microcontroller Market
Cost
Performance
© 2002 C. Kirsch -11-
Mechatronics
Fly-by-wire
Drive-by-wire

© 2002 C. Kirsch -12-
Embedded Software Engineering
You
Solver/Checker
Compiler
Real-Time Operating System
Functionality
Models
Programs Execution
Simulation/Verification
Design
Tasks Scheduling

© 2002 C. Kirsch -13-
Real-Time
Not later than
TimeTime-instant DeadlineDuration
@
for

© 2002 C. Kirsch -14-
Concurrency
Task1 Task2
HostNetwork
Message1
Message2
In addition:• Other resource constraints• Time constraints

© 2002 C. Kirsch -15-
Time
Sequential Programming
1 2
Sequential Programming
© 2002 C. Kirsch -16-
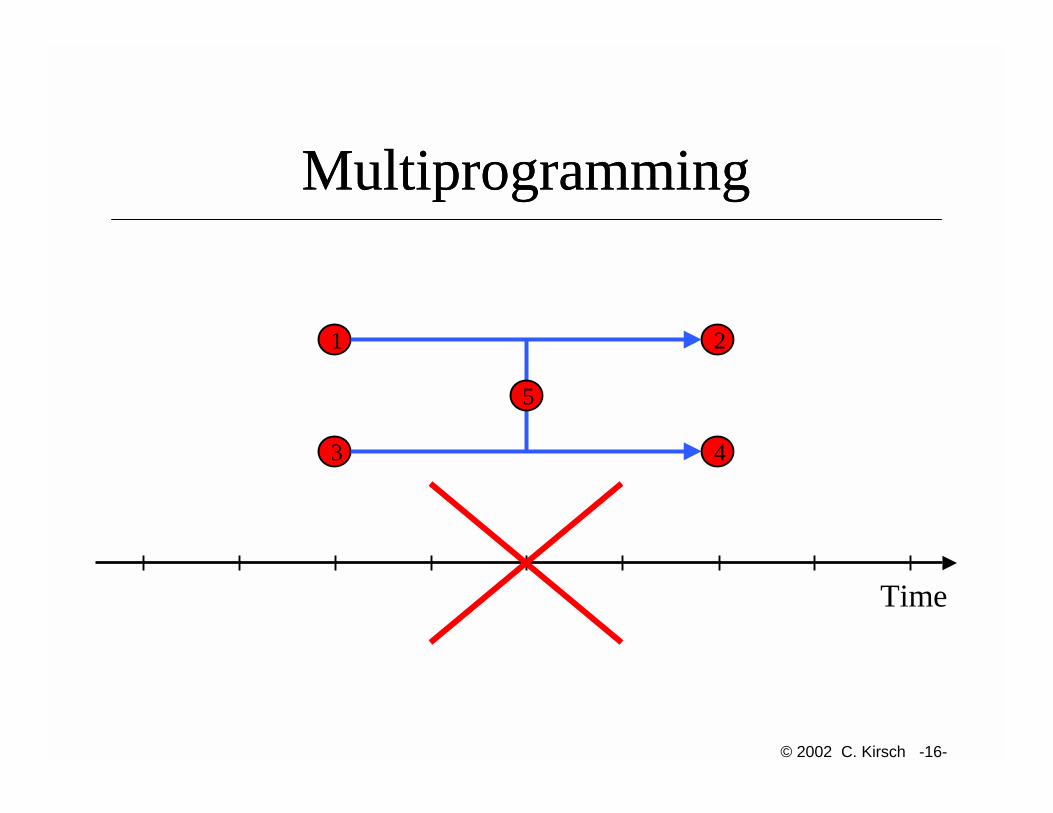
Time
Multiprogramming
1 2
3 4
5
Multiprogramming

© 2002 C. Kirsch -17-
Time
Real-Time Programming
1 2
3 4
5
Real-Time Programming

© 2002 C. Kirsch -18-
Environment
Software
Software Processes
Environment Processes
Embedded Software

© 2002 C. Kirsch -19-
Environment
Software
Environment Time
Platform Time
Environment vs. Platform Time

© 2002 C. Kirsch -20-
Environment
Software
Embedded Programming
The Art of Embedded Programming

© 2002 C. Kirsch -21-
Embedded Programming
…requires the integration of:
1. Real-time operating system concepts2. Embedded programming languages3. Embedded compilers4. SE, modeling, and simulation techniques5. Formal methods

© 2002 C. Kirsch -22-
Real-Time Task
fInput Output
Worst case execution time

© 2002 C. Kirsch -23-
Real-Time Scheduling
terminateactivate
PassiveActivation
Active

© 2002 C. Kirsch -24-
Off-Line Scheduling
terminateactivate
PassiveTable
Active
Static System
© 2002 C. Kirsch -25-
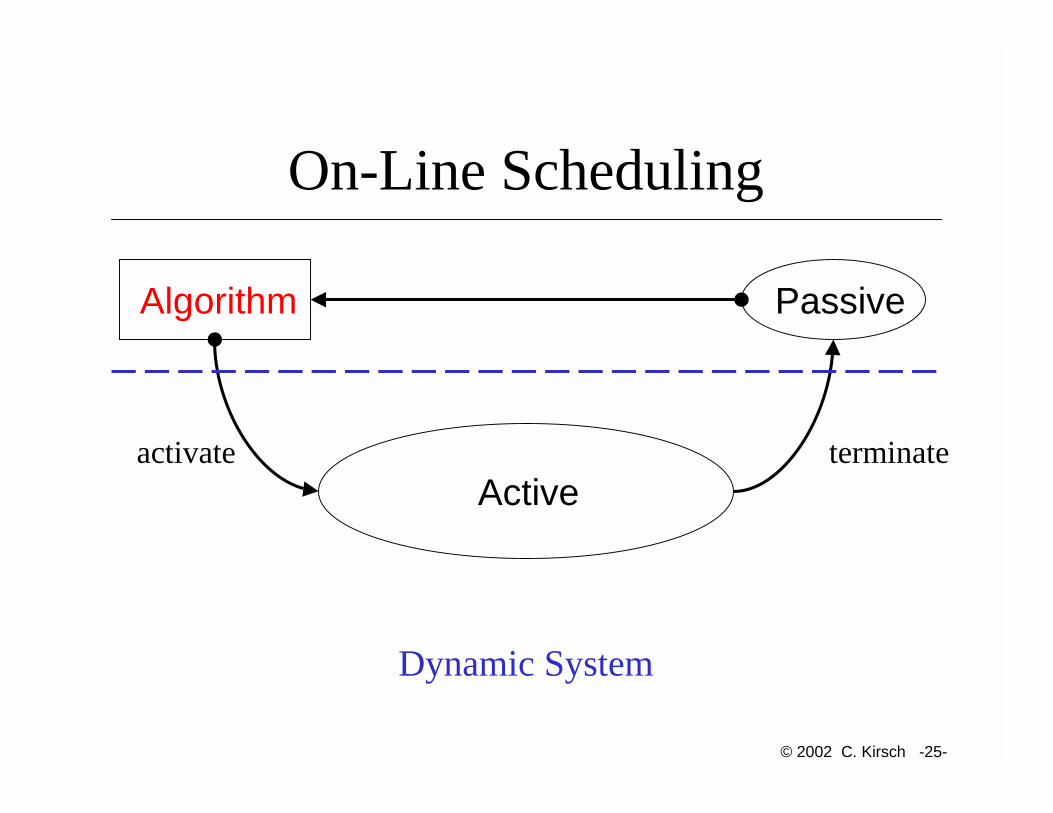
On-Line Scheduling
terminateactivate
PassiveAlgorithm
Active
Dynamic System

© 2002 C. Kirsch -26-
Non-Preemptive Scheduling
Ready Run
scheduleterminateactivate
PassiveActivation

© 2002 C. Kirsch -27-
Preemptive Scheduling
Ready Run
scheduleterminateactivate
PassiveActivation
preempt
© 2002 C. Kirsch -28-
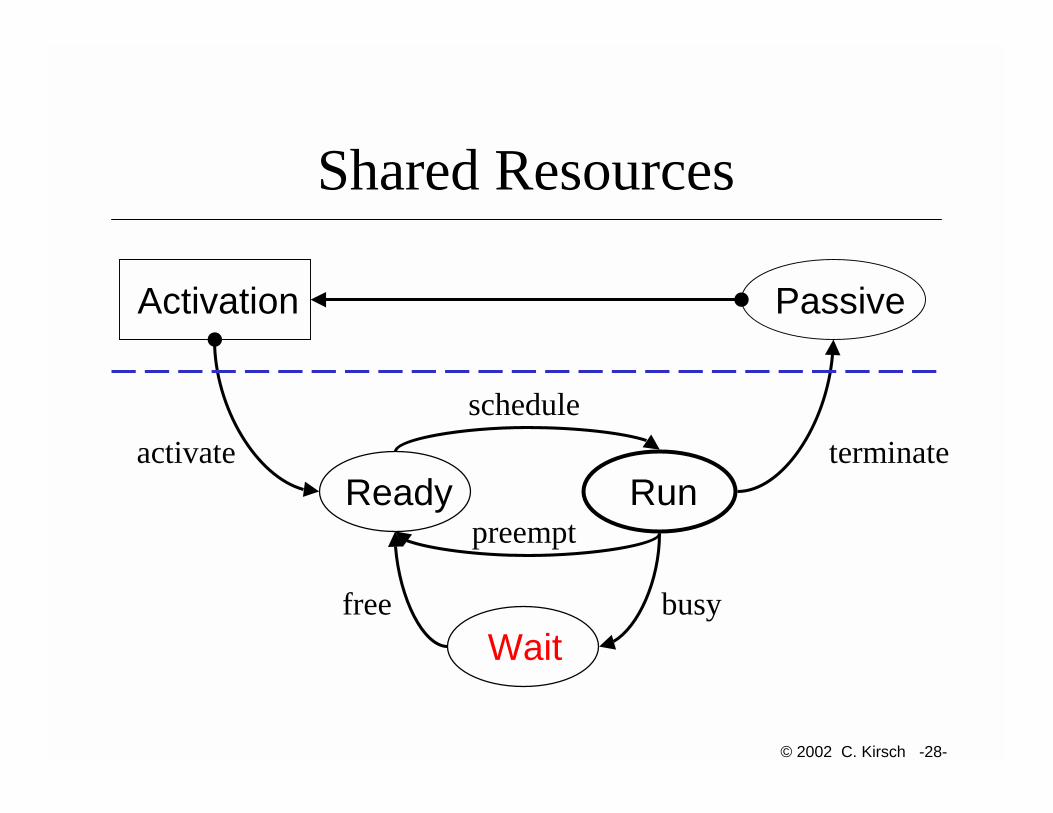
Shared Resources
Ready Run
Wait
schedule
preempt
terminate
busyfree
activate
PassiveActivation

© 2002 C. Kirsch -29-
Scheduling Problem
Real-Time Scheduling
Soft Hard
Off-line On-line
Preemptive Non-preemptive Non-preemptivePreemptive

© 2002 C. Kirsch -30-
Earliest Due Date
Time
Processors
P1 T1 T5
10
587103di
23111Ci
T5T4T3T2T1
T3 T4 T2
d1 d5 d3 d4 d2
Buttazzo97

© 2002 C. Kirsch -31-
Earliest Deadline First
Time
TasksT1
T5
10
63200ai
910452di
22221Ci
T5T4T3T2T1
T3
T4
T2 T2
T4
Buttazzo97

© 2002 C. Kirsch -32-
Real-Time Periodic Task
fInput Output
Worst case execution timeFrequency

© 2002 C. Kirsch -33-
Rate Monotonic Analysis
Time
Tasks
T1
10
105pi
12Ci
T2T1
T2 T2
T1 T1 T1

© 2002 C. Kirsch -34-
Scheduling Anomalies
T1 T9 T4
T8
T7
T6
T5
Time
Processors
P1
P2
P3
T1
T2
T3
T4
T6
T7
T9
12
T5
T8

© 2002 C. Kirsch -35-
Shorter Computation Times
T1 T9 T4
T8
T7
T6
T5
Time
Processors
P1
P2
P3
T1
T2
T3
T4 T6
T7
T9
13
T5 T8

© 2002 C. Kirsch -36-
More Processors
T1 T9 T4
T8
T7
T6
T5
Time
Processors
P1
P2
P3
P4
T1
T2
T3
T4
T5
T6
T7
T8
T9
15

© 2002 C. Kirsch -37-
Weaker Precedence
T1 T9 T4T6
T5
Time
Processors
P1
P2
P3
T1
T2
T3
T4
T7
T8 T9
16
T5
T6
© 2002 C. Kirsch -38-
Real-Time Communication
Network
Message1
Message2

© 2002 C. Kirsch -39-
Real-Time Message
mSource Target
Latency
© 2002 C. Kirsch -40-
Explicit Flow Control
Network
Message1
Message2
• Send time not known a priori• Sender can detect errors

© 2002 C. Kirsch -41-
Implicit Flow Control
Network
Message1
Message2
• Send time is known a priori• Receiver can detect errors
© 2002 C. Kirsch -42-
Explicit Flow Control: Priority
Network
Message1
Message2
Medium-Access Protocols:• CSMA/CD - LON, Echelon 1990• CSMA/CA - CAN, Bosch 1990• FTDMA - Byteflight, BMW 2000• TDMA - TTP, Kopetz 1993

© 2002 C. Kirsch -43-
Control Area Network
M1 M2
Time
Messages
M2
M1
0
0 0
0
11
0
0
0
0
0
0
0
0
0
1
1
0
0
1
1
1
0
1

© 2002 C. Kirsch -44-
Implicit Flow Control: Time
Network
Message1
Message2
Medium-Access Protocols:• FTDMA - Byteflight, BMW 2000• TDMA - TTP, Kopetz 1993

© 2002 C. Kirsch -45-
Time-Triggered Protocol
M1 M2
Time
Network
N1 M1 M2
Slot1 Slot2

© 2002 C. Kirsch -46-
Literature
• RT scheduling:– Hard Real-Time Computing Systems: Predictable
Scheduling Algorithms and Applications. G. Buttazzo. Kluwer, 1997.
• RT communication:– Real-Time Systems – Design Principles for
Distributed Embedded Applications. H. Kopetz. Kluwer, 1997.
– Byteflight, CAN papers.

© 2002 C. Kirsch -47-
Embedded Programming
…requires the integration of:
1. Real-time operating system concepts2. Embedded programming languages3. Embedded compilers4. SE, modeling, and simulation techniques5. Formal methods

© 2002 C. Kirsch -48-
Concurrency
Control Data
Task1 Task2 Task1 Task2
Parallel Composition I/O Decomposition

© 2002 C. Kirsch -49-
Control Operators
Parallel ChoiceSequential Loop
© 2002 C. Kirsch -50-
Real-Time
State
TimeEvent FrequencyTime
Change of state
Function
© 2002 C. Kirsch -51-
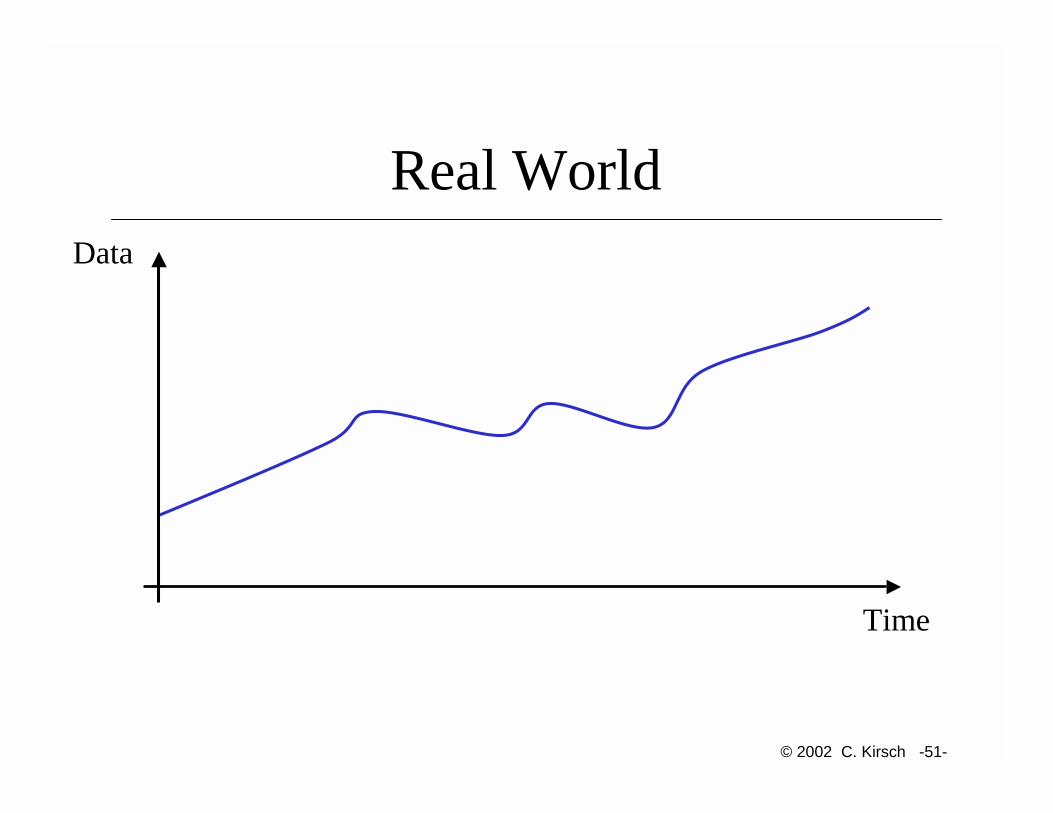
Real World
Time
Data

© 2002 C. Kirsch -52-
Discrete Data
Time
d0
d1
d2
Datad3
© 2002 C. Kirsch -53-
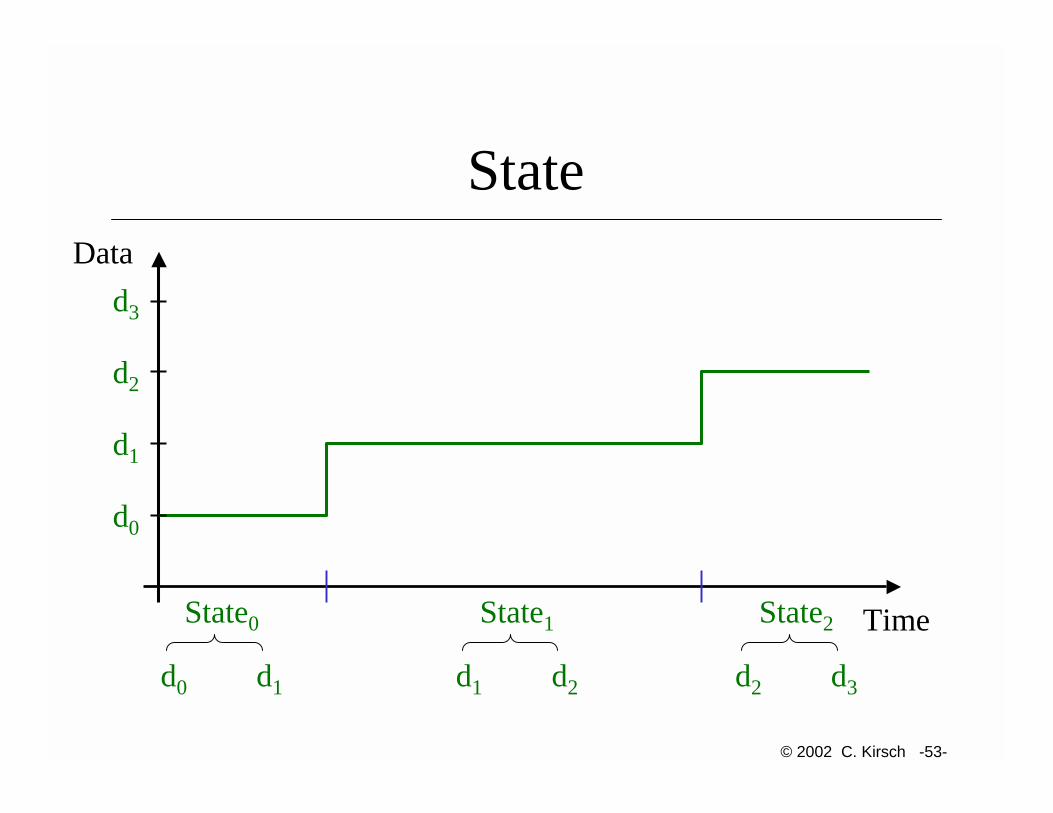
State
TimeState1
d0
State2
Data
State0
d1
d2
d0 d1 d1 d2 d2 d3
d3
© 2002 C. Kirsch -54-
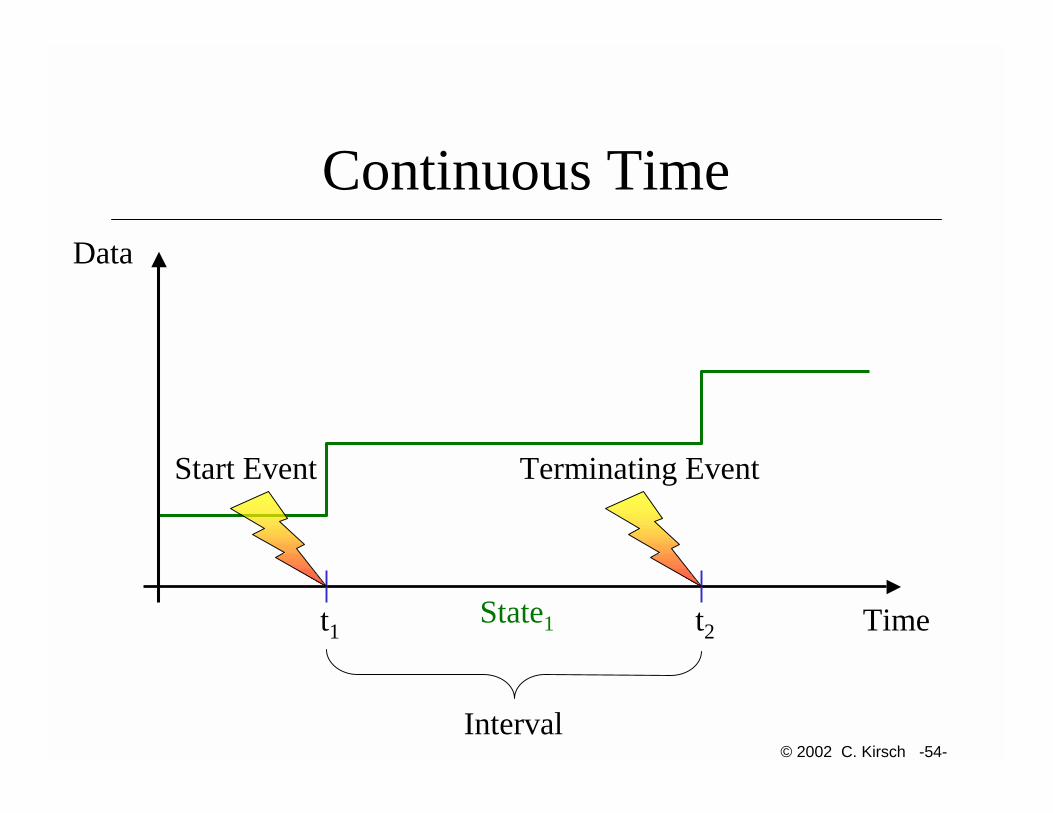
Continuous Time
Time
Interval
Start Event Terminating Event
t1 t2State1
Data
© 2002 C. Kirsch -55-
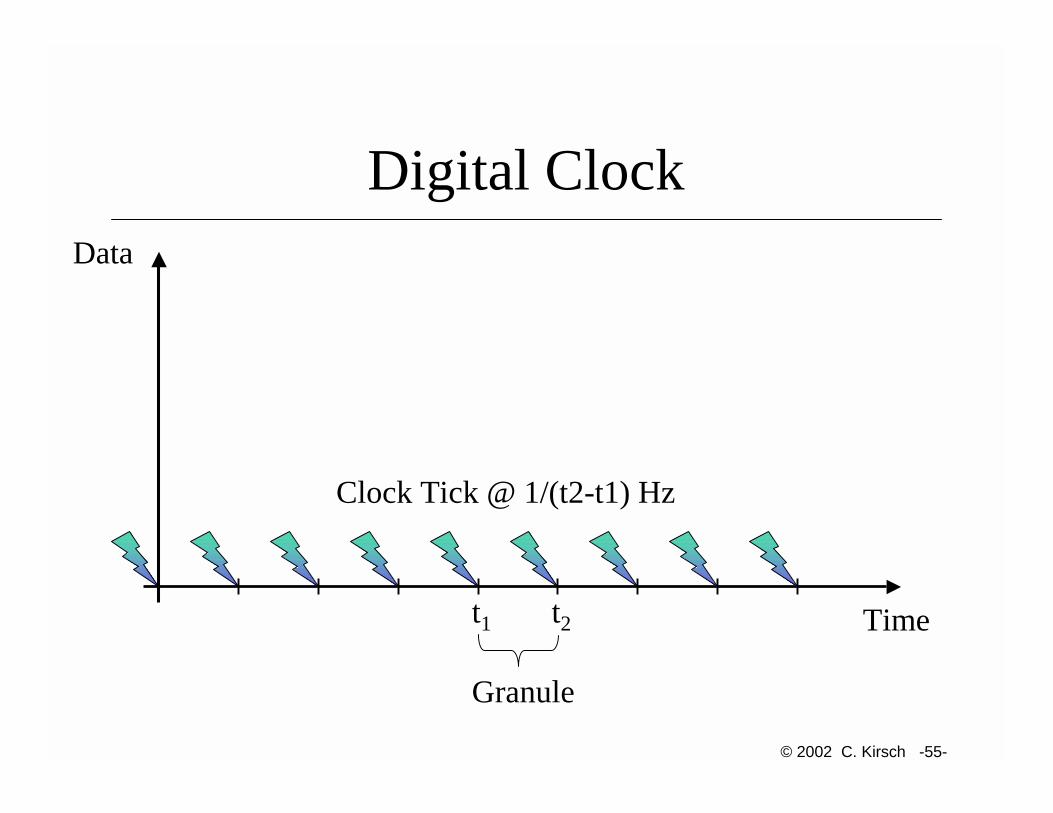
Digital Clock
Time
Data
Granule
t1 t2
Clock Tick @ 1/(t2-t1) Hz

© 2002 C. Kirsch -56-
Discrete Time
Time
Data
t1 t2
State1

© 2002 C. Kirsch -57-
Event-Triggered (ET) System
Time
Data
Change of state
© 2002 C. Kirsch -58-
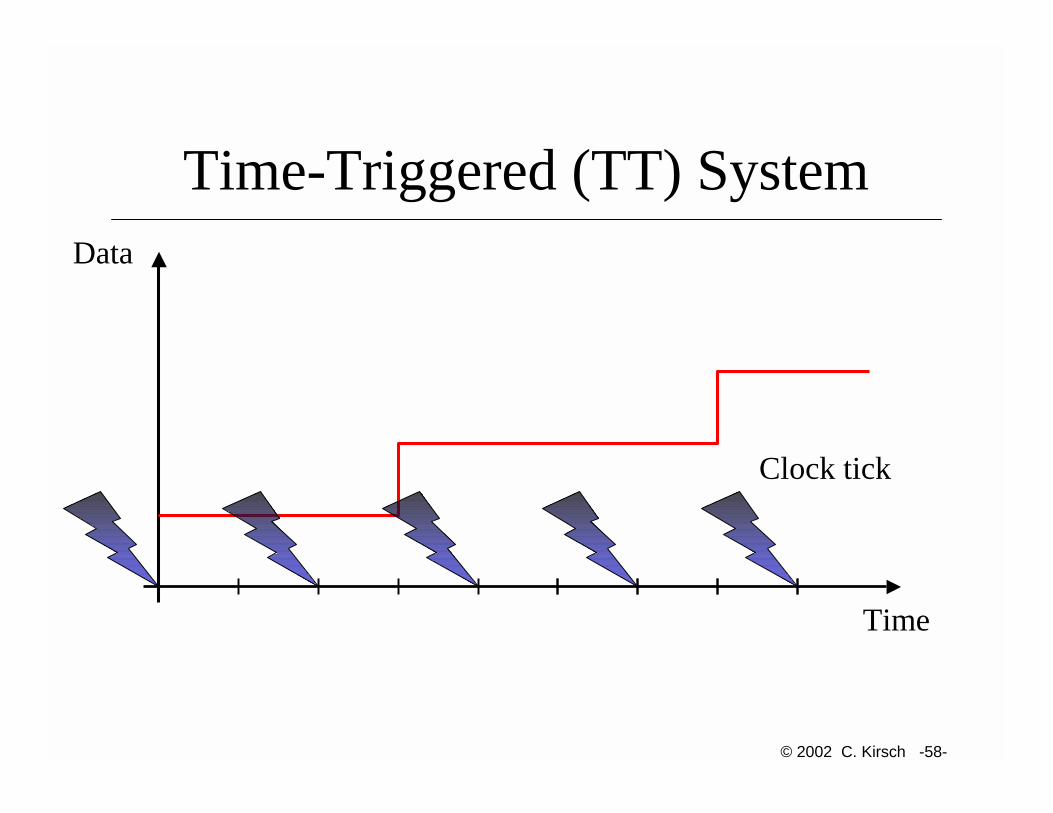
Time-Triggered (TT) System
Time
Data
Clock tick

© 2002 C. Kirsch -59-
Esterel - Giotto
• Esterel:– Synchronous reactive language– Event-triggered semantics
• Giotto:– Time-triggered semantics– Distributed platforms
© 2002 C. Kirsch -60-
Event - Reaction
fEvent Reaction

© 2002 C. Kirsch -61-
Esterel: Event
Event:
Time
emit S
Loop: loop P each SP
await S

© 2002 C. Kirsch -62-
Esterel: Operators
Choice:Parallel:
P || Q present S then P else Q
Sequential: P ; QP Q
P
Q
P
Q

© 2002 C. Kirsch -63-
Esterel: Controller
module normal:
input A, B, R;
output O;
loop
[ await A || await B ];
emit O
each R
end module
R?
R? R?
A?.~R?.O!
A?.~R? B?.~R?
B?.~R?.O!
A?.B?.~R?.O!

© 2002 C. Kirsch -64-
Sensor - Control Law - Actuator
fSensors Actuators
© 2002 C. Kirsch -65-
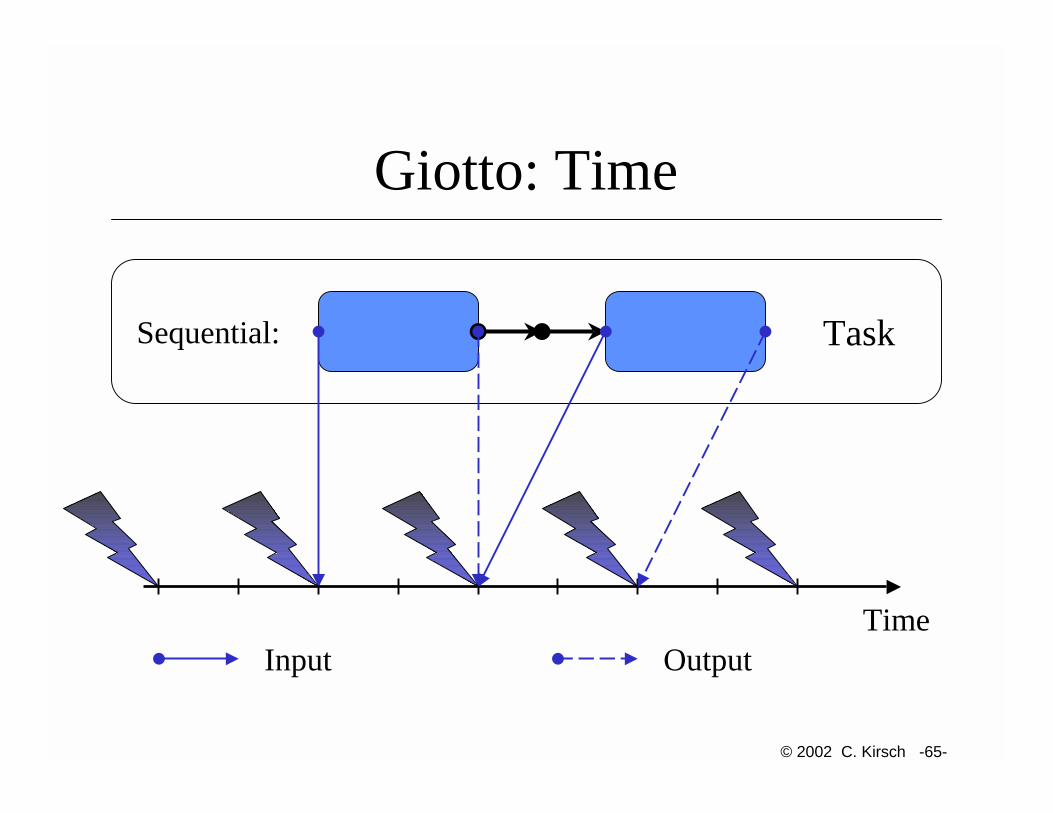
Giotto: Time
Sequential: Task
TimeInput Output

© 2002 C. Kirsch -66-
Giotto: Operators
Choice:Parallel:
Mode Program
Sequential: Task
© 2002 C. Kirsch -67-
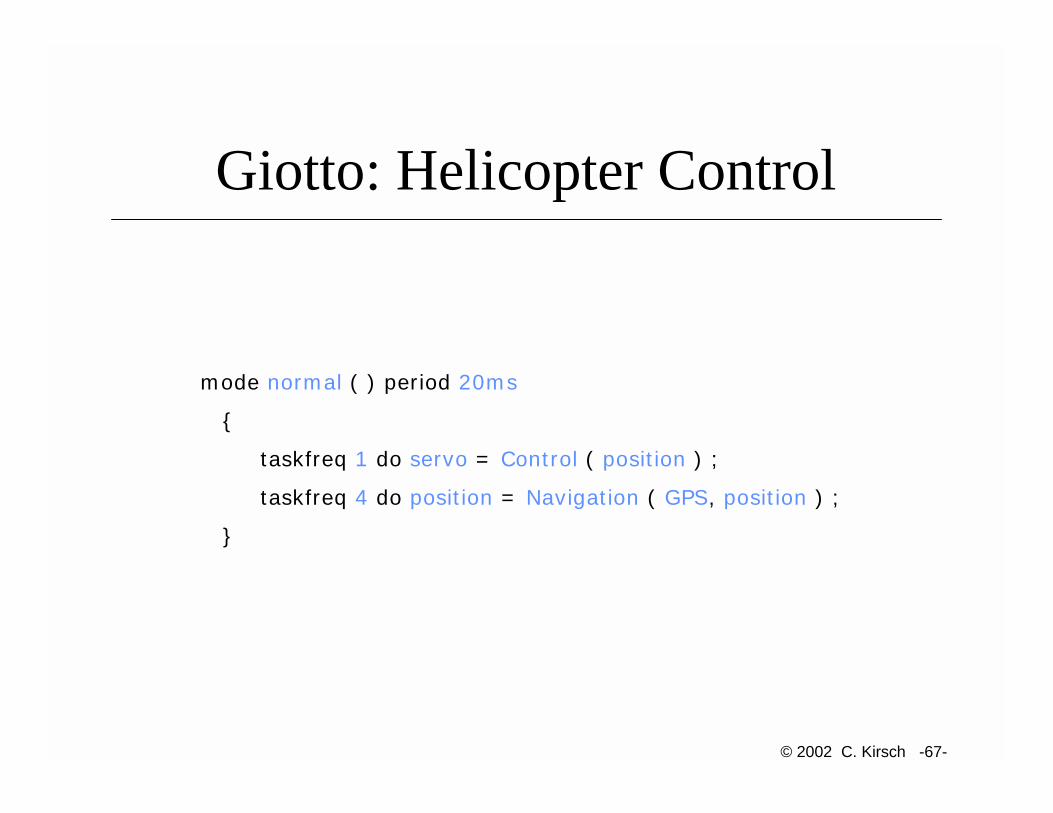
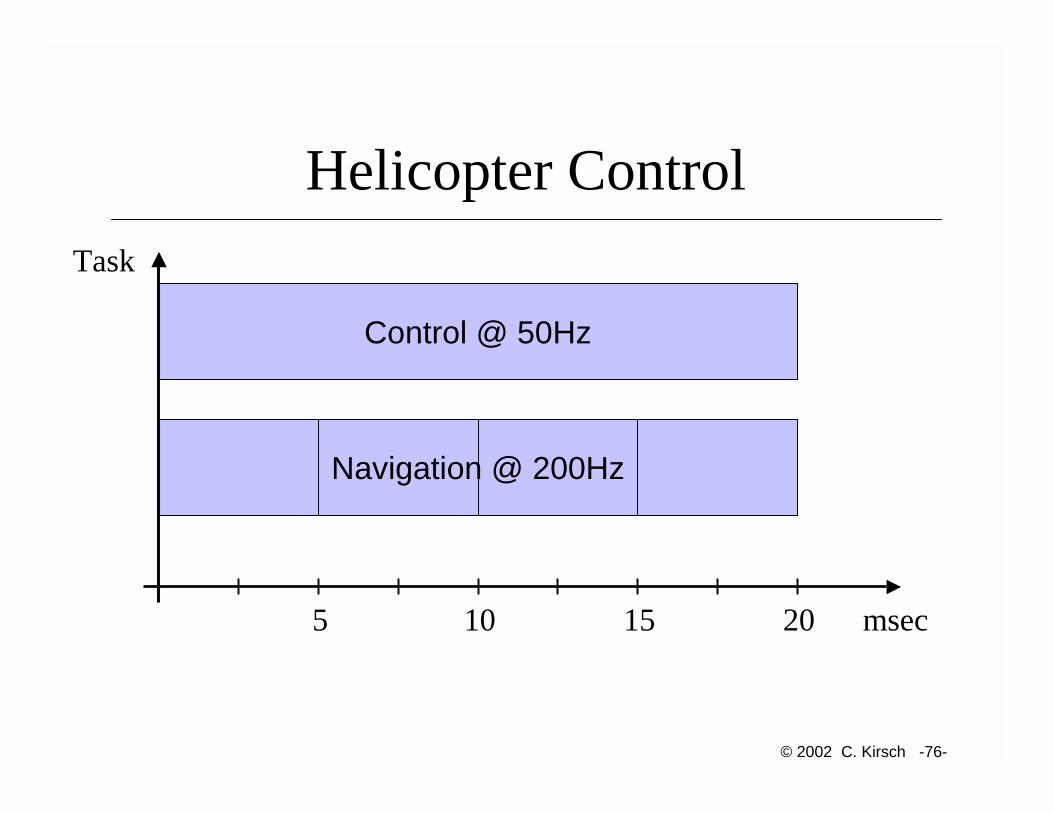
Giotto: Helicopter Control
mode normal ( ) period 20ms
{
taskfreq 1 do servo = Control ( position ) ;
taskfreq 4 do position = Navigation ( GPS, position ) ;
}

© 2002 C. Kirsch -68-
Control @ 50Hz
SemanticsTask
Navigation @ 200Hz
msec5 10 15 20

© 2002 C. Kirsch -69-
InputTask
msec5 10 15 20

© 2002 C. Kirsch -70-
ComputationTask
msec5 10 15 20
Control Law Navigation Integrator

© 2002 C. Kirsch -71-
OutputTask
msec5 10 15 20

© 2002 C. Kirsch -72-
Literature
• Esterel:– The Foundations of Esterel. G. Berry. In Proof, Language
and Interaction: Essays in Honour of Robin Milner. G. Plotkin, C. Stirling and M. Tofte, editors. MIT Press, 2000.
– Synchronous programming of reactive systems. N. Halbwachs. Kluwer, 1993.
• Giotto:– Embedded Control Systems Development with Giotto. B.
Horowitz, T. Henzinger, C. Kirsch. 2001.– Giotto: A Time-Triggered Language for Embedded
Programming. B. Horowitz, T. Henzinger, C. Kirsch. 2001.

© 2002 C. Kirsch -73-
Embedded Programming
…requires the integration of:
1. Real-time operating system concepts2. Embedded programming languages3. Embedded compilers4. SE, modeling, and simulation techniques5. Formal methods

© 2002 C. Kirsch -74-
Concurrency
Task1 Task2 Task1 Task2
Parallel Composition I/O Decomposition
Task1 Task2;Task2 Task1;
Task1 Task2Task2 Task1

© 2002 C. Kirsch -75-
Real-Time
Task1 Task2; ; Task1Task3 Task2 Task1;
TimeEvent
DeadlineTimeFrequency
© 2002 C. Kirsch -76-
Control @ 50Hz
Helicopter ControlTask
Navigation @ 200Hz
msec5 10 15 20
© 2002 C. Kirsch -77-
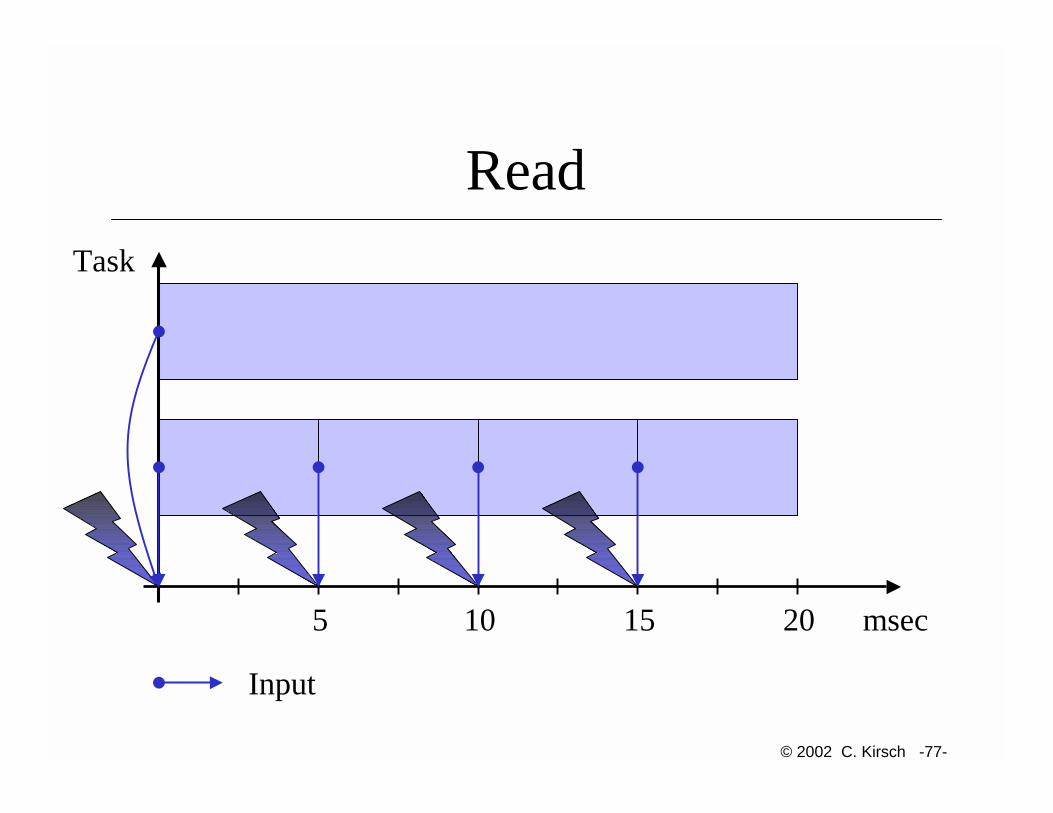
ReadTask
msec5 10 15 20
Input

© 2002 C. Kirsch -78-
WriteTask
msec5 10 15 20
Output

© 2002 C. Kirsch -79-
Worst Case Execution TimeTask
msec5 10 15 20
Control Law Navigation Integrator

© 2002 C. Kirsch -80-
DeadlineTask
msec5 10 15 20

© 2002 C. Kirsch -81-
CodeTask
msec5 10 15 20

© 2002 C. Kirsch -82-
Literature
• Some compiler books:– Compiler Construction, N. Wirth, Addison-Wesley,
1996.– Compilers, Principles, Techniques, and Tools.
A.V. Aho, R. Sethi, J.D. Ullman. Addison-Wesley, 1985.
– Compiler Design. R. Wilhelm, D. Maurer. Addison-Wesley, 1995.

© 2002 C. Kirsch -83-
Embedded Programming
…requires the integration of:
1. Real-time operating system concepts2. Embedded programming languages3. Embedded compilers4. SE, modeling, and simulation techniques5. Formal methods
© 2002 C. Kirsch -84-
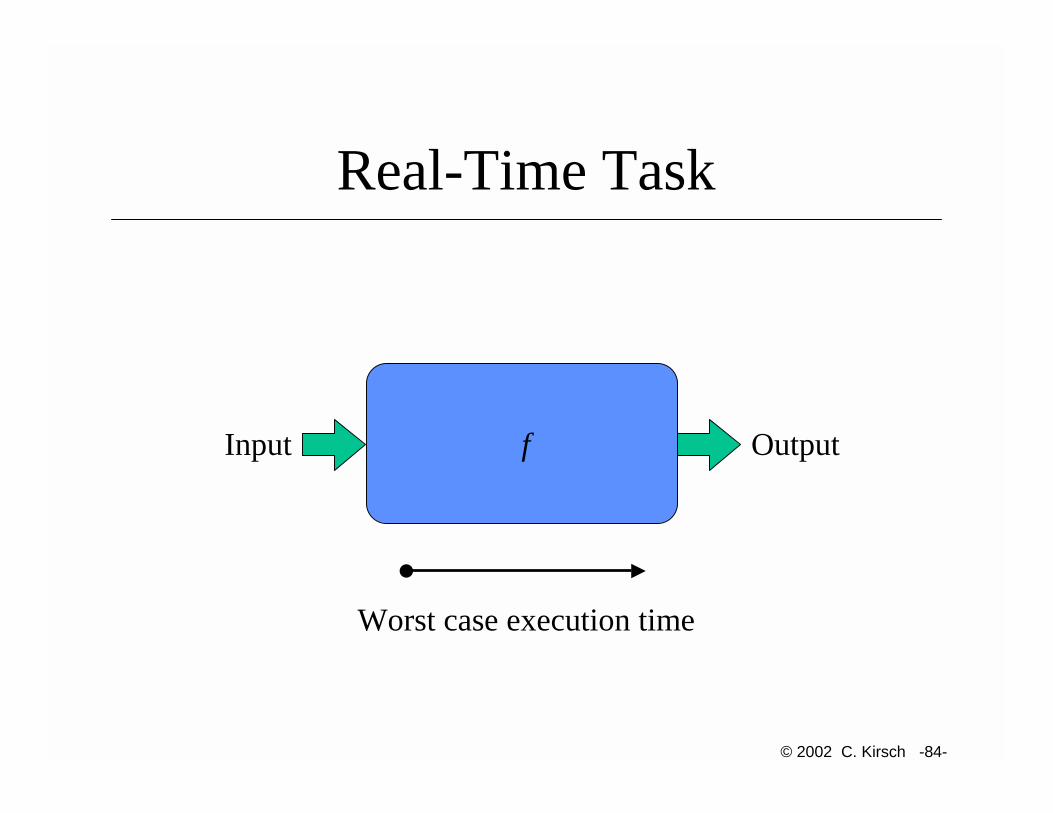
Real-Time Task
fInput Output
Worst case execution time
© 2002 C. Kirsch -85-
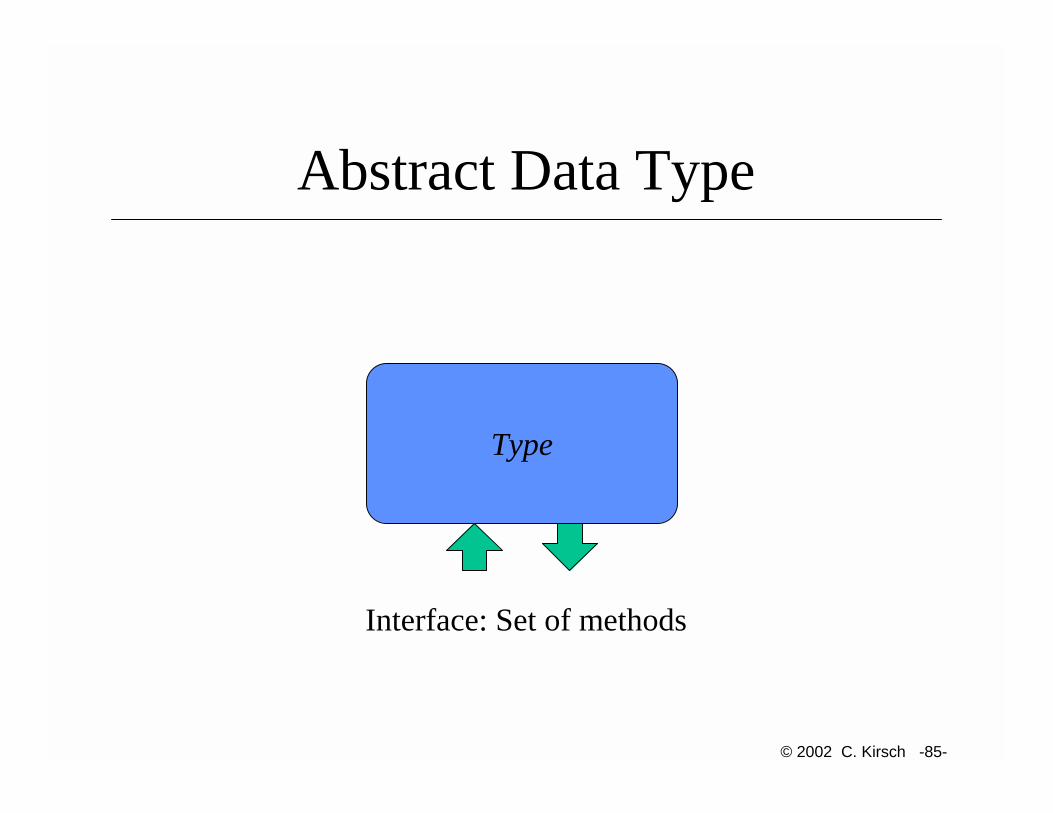
Type
Abstract Data Type
Interface: Set of methods

© 2002 C. Kirsch -86-
Empty
Abstract Interface
Interface: Set of methods

© 2002 C. Kirsch -87-
Application-dependent
Framework
Application-dependent
Application-independent
© 2002 C. Kirsch -88-
?
Type vs. Task
Interface: Set of methods
Input Output

© 2002 C. Kirsch -89-
Literature
• Patterns & Frameworks:– Design Patterns: Elements of Reusable Object
Oriented Software. E. Gamma, J. Vlissides, R. Johnson, R. Helm. Addison Wesley, 1994.
– Design Patterns for Object-Oriented Software Development. W. Pree, E. Gamma. Addison Wesley, 1995.

© 2002 C. Kirsch -90-
Embedded Programming
…requires the integration of:
1. Real-time operating system concepts2. Embedded programming languages3. Embedded compilers4. SE, modeling, and simulation techniques5. Formal methods
© 2002 C. Kirsch -91-
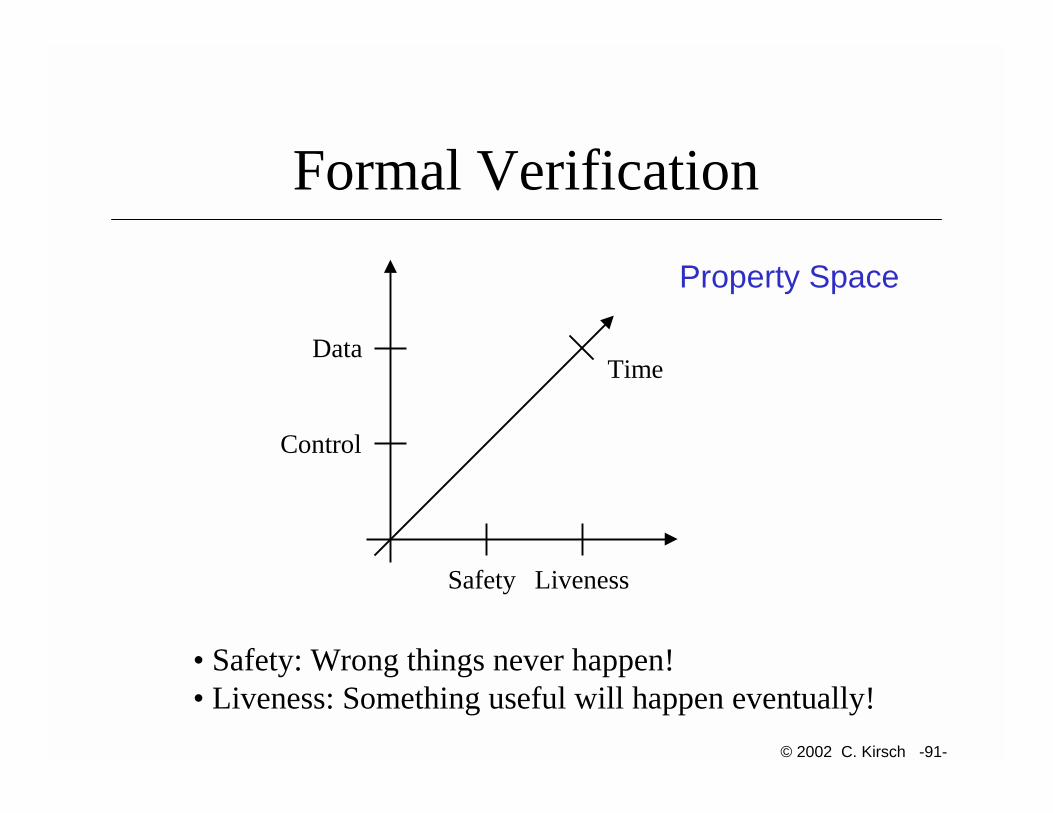
Formal Verification
Time
Safety Liveness
Control
Data
• Safety: Wrong things never happen!• Liveness: Something useful will happen eventually!
Property Space

© 2002 C. Kirsch -92-
Language Hierarchy
Design
Model
Program
Executable
Non-Deterministic
synthesize analyze
compile
expand
Deterministic
Sequential
Universal Macros
Automata
Code
Machine

© 2002 C. Kirsch -93-
Non-Determinism
Parallel ChoiceSequential Non-DeterminismA E
Programming Operators Modeling Operator

© 2002 C. Kirsch -94-
Esterel: Verification
EsterelProperty
AutomataAutomata
Automata
Esterel Abstraction “Bisimulation”
Model Checking

© 2002 C. Kirsch -95-
Esterel: Hierarchy
Design
Model
Esterel
Executable
Bisimulation
compile
Non-Det. Automata
Deterministic Code
Sequential Circuit
Model Checking

© 2002 C. Kirsch -96-
Giotto: Verification
GiottoProperty
MasaccioAutomata
MasaccioModel Checking
Abstraction “Refinement”
© 2002 C. Kirsch -97-
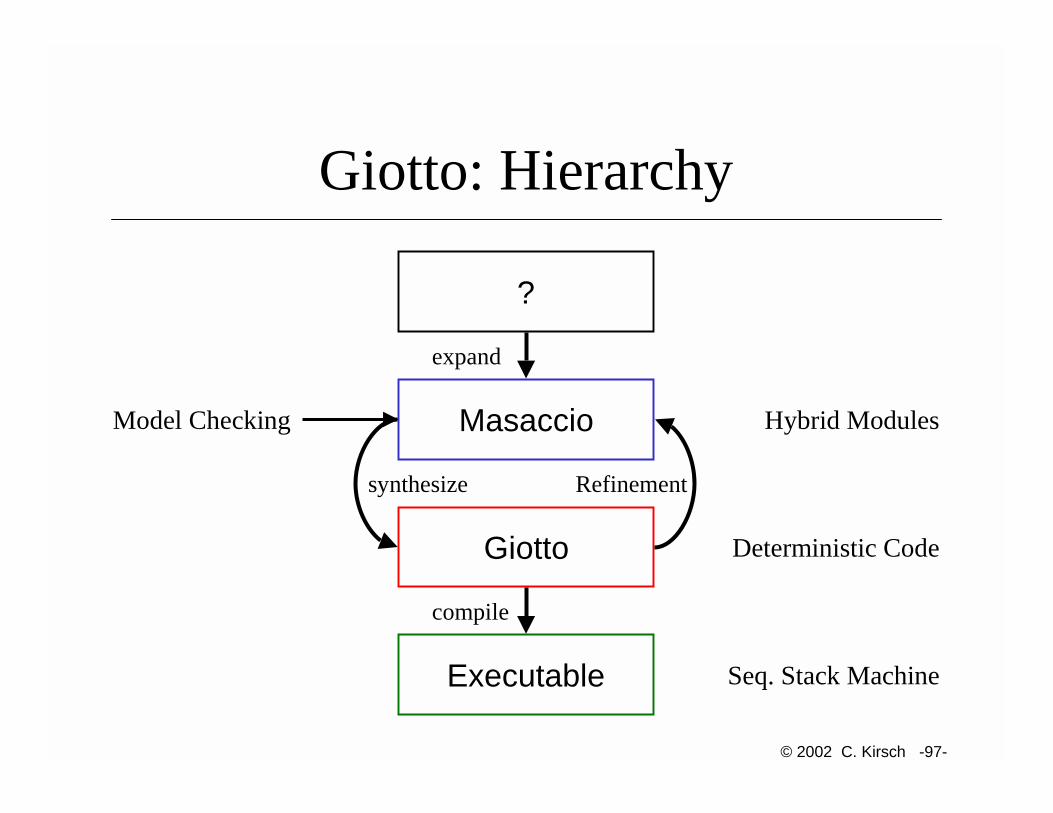
Giotto: Hierarchy
?
Masaccio
Giotto
Executable
synthesize Refinement
compile
expand
Hybrid Modules
Deterministic Code
Seq. Stack Machine
Model Checking
© 2002 C. Kirsch -98-
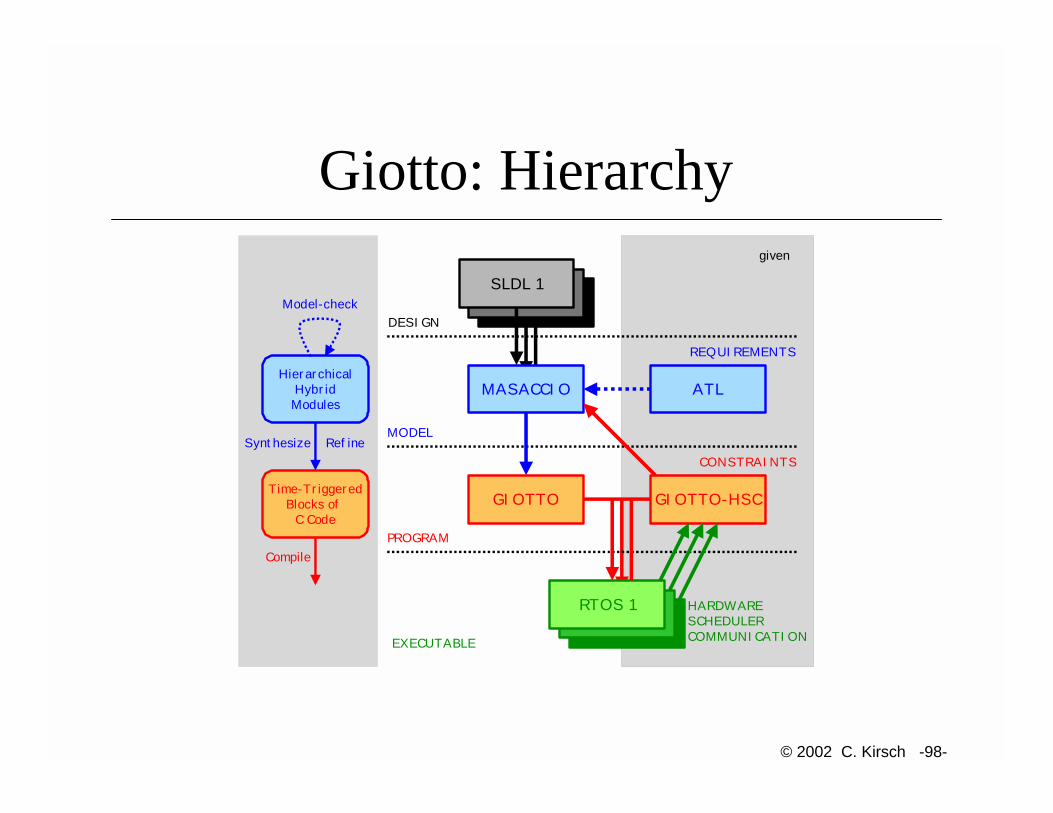
Giotto: Hierarchy
SLDLSLDL
SLDLSLDL
MASACCIO ATL
GIOTTO GIOTTO-HSC
SLDL 1
RTOS 1
DESIGN
MODEL
PROGRAM
EXECUTABLE
HARDWARESCHEDULERCOMMUNICATION
HierarchicalHybridModules
Time-TriggeredBlocks of
C Code
Model-check
Compile
given
Synthesize Refine
REQUIREMENTS
CONSTRAINTS

© 2002 C. Kirsch -99-
Literature
• Esterel:– Papers @ www.esterel.org
• Giotto:– T.A. Henzinger. Masaccio: A Formal Model for
Embedded Components. LNCS 1872, Springer, 2000, pp. 549-563.

© 2002 C. Kirsch -100-
End





























