Embed Size (px)
Citation preview

(c)2017 van Putten 1
Elements of classical mechanics
🍎

(c)2017 van Putten 2
Contents
I. Trajectories
Cartesian and polar coordinates
Rotations
Energy and forces
II. Hyperbolic and elliptic trajectories
III. Three classical mechanics problems
Hooke’s spring
Newton’s apple
The jumper

Particle trajectories
Cartesian and polar coordinates
Trajectories: bound and unbound
Energy and forces
(c)2016 van Putten 3

4
🍎
Cartesian coordinate system
(c)2017 van Putten

5
— Cartesian coordinates (x,y)
🍎abscissa
ordi
nate
x-axis
y-axis A(x,y)
(c)2017 van Putten

6
🍎
— polar coordinates
(c)2017 van Putten

7
🍎
— polar coordinates (r,phi)
r = le
ngth
penc
il
ϕpolar angle
(c)2017 van Putten

Basis vectors
A=(a,b)
x-axis
y-axis
b
a
i
j
{i,j} = orthonormal basis:
i,j have unit length
i,j are orthogonala = projection of A onto the x-axis
b = projection of A onto the y-axis
(c)2017 van Putten8

Representations of a vector
A = a i + b j = a 10
⎛
⎝⎜⎞
⎠⎟+ b 0
1⎛
⎝⎜⎞
⎠⎟
= a0
⎛
⎝⎜⎞
⎠⎟+ 0
b⎛
⎝⎜⎞
⎠⎟= a
b⎛
⎝⎜⎞
⎠⎟
i = 10
⎛
⎝⎜⎞
⎠⎟, j = 0
1⎛
⎝⎜⎞
⎠⎟
(c)2017 van Putten9
choice of basis vectors

Rotation of a coordinate system
x-axis
y-axis
b’ a’
Ay’-axis
x’-axis
{i,j} {i’,j’}
ϕ
Rotation of an ONB
In rotating a coordinate system, vectors A remain unchanged
a’ = projection of A onto the x’-axis
b’ = projection of A onto the y’-axis
(c)2017 van Putten10
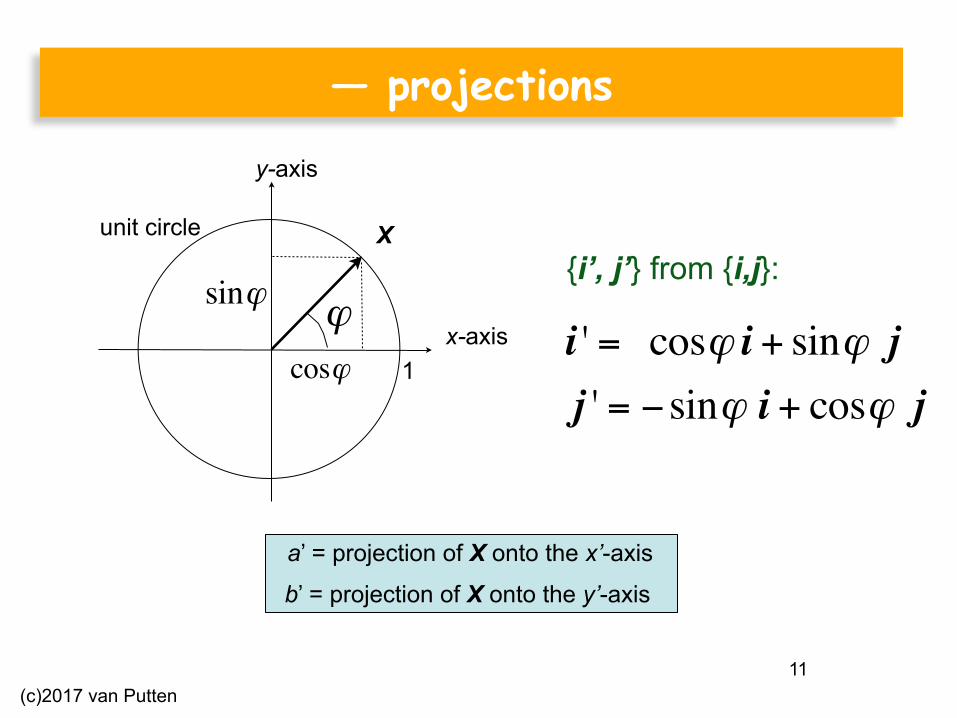
— projections
{i’, j’} from {i,j}:
a’ = projection of X onto the x’-axis
b’ = projection of X onto the y’-axis
x-axis
y-axis
Xunit circle
1
sinϕ
cosϕ
ϕi ' = cosϕ i + sinϕ jj ' = −sinϕ i + cosϕ j
(c)2017 van Putten11

Rotation: a linear transformation
A = a 'i '+ b ' j '= a '(cosϕ i + sinϕ j) + b'(−sinϕ i + cosϕ j)= (a 'cosϕ − b 'sinϕ )i +(a'sinϕ + b 'cosϕ ) j≡ ai +bj
ab
⎛
⎝⎜⎞
⎠⎟= R a '
b '⎛
⎝⎜⎞
⎠⎟=
cosϕ −sinϕsinϕ cosϕ
⎛
⎝⎜
⎞
⎠⎟
a 'b '
⎛
⎝⎜⎞
⎠⎟
R = rotation matrix
(c)2017 van Putten12

— example (I)
ϕ =ωt
ab
⎛
⎝⎜⎞
⎠⎟=
cosωt −sinωtsinωt cosωt
⎛
⎝⎜⎞
⎠⎟a 'b '
⎛
⎝⎜⎞
⎠⎟
In a co-rotating frame of the moon:
ω =2πP
angular velocity of circular motion with period P
Earth
Moon
a 'b '
⎛
⎝⎜⎞
⎠⎟= R
0⎛
⎝⎜⎞
⎠⎟
(c)2017 van Putten13
:

— example (II)ab
⎛
⎝⎜⎞
⎠⎟= R cosωt −sinωt
sinωt cosωt⎛
⎝⎜⎞
⎠⎟10
⎛
⎝⎜⎞
⎠⎟
= R cosωtsinωt
⎛
⎝⎜⎞
⎠⎟ Earth
Moon
A = ab
⎛
⎝⎜⎞
⎠⎟,
dAdt
= da / dtdb / dt
⎛
⎝⎜⎞
⎠⎟= Rω −sinωt
cosωt⎛
⎝⎜⎞
⎠⎟
Earth
Moon
A
dA/dtvelocity vector
position vector
dAdt
=dadt
⎛⎝⎜
⎞⎠⎟
2
+dbdt
⎛⎝⎜
⎞⎠⎟
2
= Rω
(c)2017 van Putten14
||A||=R d||A||/dt=0
:

15
ddti ' =ω j '
ddtj ' = −ω i '
⎧
⎨⎪⎪
⎩⎪⎪
— example (III)
{i '(t), j '(t)}Same applied to the rotating ONB
i’(t)
i’(t+dt) di’j’(t)
j’(t+dt)
dj’
(c)2017 van Putten
dϕdt
=ω

16
Trajectories in Newton’s gravitational field
Bound orbits
Unbound trajectories
(c)2017 van Putten

17
Trajectories in Newtonian gravity
Bound: elliptical orbits
Unbound: hyperbolic orbitsfocal points at ± p
ϕ
m
M
−ϕ0 <ϕ(t) <ϕ0
p-p
M
ml1 l2l1 + l2 = const.
(c)2017 van Putten
18
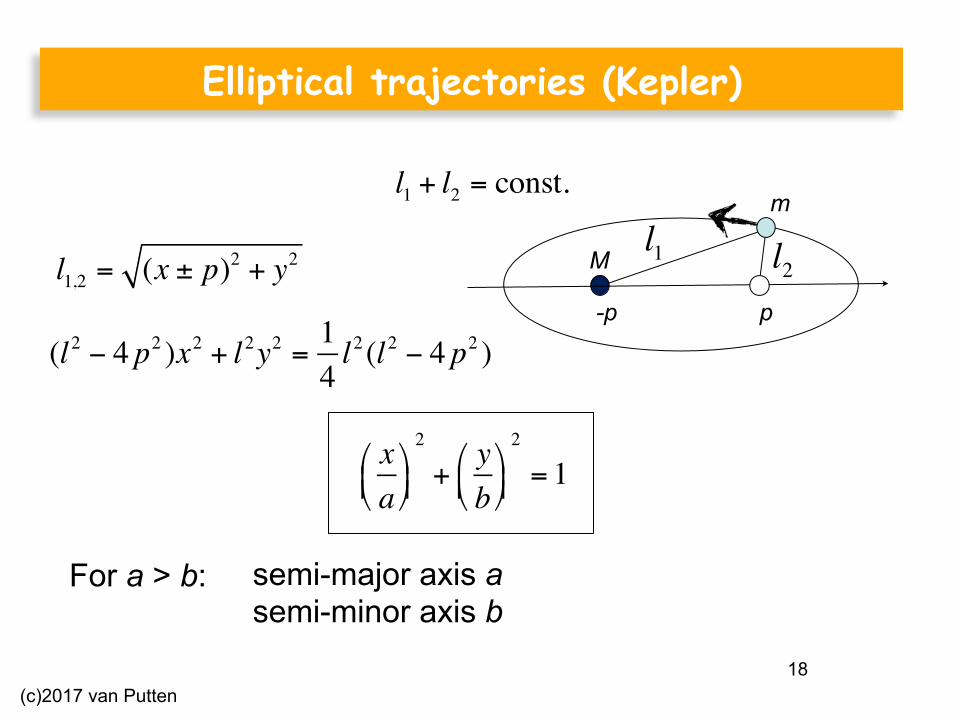
Elliptical trajectories (Kepler)
p-p
M
ml1 l2
l1 + l2 = const.
l1,2 = (x ± p)2 + y2
(l2 − 4 p2 )x2 + l2y2 = 14l2 (l2 − 4 p2 )
xa
⎛⎝⎜
⎞⎠⎟
2
+yb⎛⎝⎜
⎞⎠⎟
2
= 1
semi-major axis a semi-minor axis b
For a > b:
(c)2017 van Putten

Hyperbolic trajectories (“scattering”)
ϕ
m
M
−ϕ0 <ϕ(t) <ϕ0
r = rcosϕsinϕ
⎛
⎝⎜
⎞
⎠⎟ , r = r ϕ( )Polar coordinates:
Newton’s gravitational force F = −GMmr2
r̂, r̂ = rr,
Can show: r = const.sinϕ0 + sinϕ
(c)2017 van Putten19

20
Open and closed according to total energy H
Bound orbits:
Unbound trajectories:
closed
open (reach out to infinity)
H < 0
H > 0
(c)2017 van Putten

21
Kinetic and potential energy
Kinetic energy:
Potential energy (Newtonian gravitational binding energy):
Ek =12mv2
U = −GMmr
v
r
Ek ∝ v2 ≥ 0
U ∝−Mmr
≤ 0
(c)2017 van Putten

22
Total energy H
Total energy H: kinetic energy plus potential energy
H = Ek +U =12mv2 − GMm
r
(c)2017 van Putten

23
One-dimensional “orbits”
v = drdt
m dvdt= F = − d
drU = −
GMmr2
M m
linear motion in one dimension
dHdt
= mv dvdt+GMmr2
drdt= v m dv
dt+GMmr2
⎛⎝⎜
⎞⎠⎟= 0
Newton’s law of gravity
Total energy H is conserved
(c)2017 van Putten

24
Classification of orbits by H
H = Ek +U =12mv2 − GMm
r
Since Ek ≥ 0,U→ 0
H < 0H > 0
bound orbits: forbidden to reach infinity
upon approaching infinity
unbound orbits: allowed to reach infinity
(c)2017 van Putten

25
“Black objects”
1793: John Michell
1795: Pierre Laplace
1915: Karl Schwarzschild (exact solution)
1967: John Wheeler’s “black hole”
1974: Stephen Hawking: black holes are grey, emitting thermal radiation
(c)2017 van Putten

26
“Black objects”
H = 0 : 12mve
2 −GMmR
= 0
ve : initial velocity at the surface (“escape velocity”)
H<0: fall back
H>0: successful escapeH=0: “trapped surface” within which H < 0
(c)2017 van Putten
🙂

27
Black holes
12mc2 − GMm
RS= 0 :
ve = cConsider the limit (velocity of light)
RS =2GMc2
R = RS Radius of a
Schwarzschild black hole
(c)2017 van Putten

28
When does Newton’s law of gravity apply?
Newton’s law of gravitational attraction to a mass M applies, provided that
a) distances >> Schwarzschild radius of M
b) accelerations >> cosmological background acceleration (defined by the velocity of light and the Hubble parameter)
Newton’s law applies very well to the solar system, except for small deviations in the orbit of Mercury (small but important!)
(c)2017 van Putten

29
Force and energy
m
(c)2017 van Putten

30
Work and potential energy
ropespring
m pull
wall
a) Fs = −Fr
Fs Fr
Newton’s third law
b)Work performed stored in spring potential energyΔEs =W
W
(c)2017 van Putten

31
Work and potential energy
ΔEs = − Fs0
Δl
∫ ds
W = Fr0
Δl
∫ ds
Newton’s third law ΔEs =W
Δl
Changes are assumed to be slow and conservative, neglecting kinetic energy in m and dissipation by friction
(c)2017 van Putten

32
— example: linear spring
Fs = −kl
k is spring constant:
length of spring
force on the spring
linear range
over-stretched, nonlinear
[k]= [F][l]
=g cms−2
cm= g s−2
Hooke’s law (1660):
(c)2017 van Putten

33
— Aside: Young’s modulus
Formulation of Hooke’s law in dimensionless strain ΔL/L
(c)2017 van Putten

34
— strain-stress correlation
Young: linear relationship between stress and strain
solid material
(c)2017 van Putten
F = Aσ
σ = E Δll
E is Young’s modulus

35
— strain-stress correlation
dimensionless strain
stress linear range
over-stretched, nonlinear
[E]= [F / A][Δl / l]
= g cm−1s−2
solid material
E large: stiff material E small: soft material
(c)2017 van Putten
Dimensional analysis:

36
Hooke’s pendulum clock
u
Hooke: linear relationship between force and stretch
length l
(c)2017 van Putten
F = ku
u = l0 − l

37
Hooke’s pendulum clock
u
u(t)t
F0 = mg = kl0Gravitational force balanced by a stretch of the spring:
length l
l = l0 − uΔF = F − F0 = −k(l − l0 ) = −ku
ΔF = ma = −m&&uNewton’s third law
(c)2017 van Putten
Ü
m&&u = −kuÜ

38
Hooke’s pendulum clock
u
u(t)t
Time-harmonic deflection
length l
u = Acos ωt +ϕ0( ),
Equation of motion
is a 2nd order ordinary differential equation:
Two integration constants: amplitude A, initial phase ϕ0
ω =km,
P = 2πω
= 2π mk
(c)2017 van Putten
m&&u = −kuÜ

39
The free falling apple
(c)2017 van Putten

40
— trajectory in space and time
height u(t)
Free fall initial value problem
velocity du(t)/dt
time tT
fall (drop) =
area A(t)
area A(t)
(c)2017 van Putten
m&&u = −mgu(0) = H&u(0) = 0
⎧
⎨⎪
⎩⎪
Ü
ů(0)ů(0)
mů(t)=-mg

41
— free fall time
Integrate:
Integrate a second time:
u(t)− u(0) = − 12gt 2 : u(t) = H −
12gt 2
u(T ) = 0 : T =2HgFree fall time:
(A(t) = ½ g t2) u(t) = H – A
(c)2017 van Putten
&u(t)− &u(0) = −gt : &u(t) = −gtů(t) - ů(0) ů(t)
(“H - area”)
ů(t)

(c)2015 van Putten
http://www.wired.com/2014/04/basketball-physics/
The jumper
(c)2017 van Putten42

29
m&&u = −mgu(0) = 0&u(0) =V
⎧
⎨⎪
⎩⎪
43
— trajectory in space and time
The jumper “flies” according to the initial value problem
with prescribed initial height and velocity
velocity du(t)/dt
T
area A(t)
height u(t)
time tjump height area A(t)
(c)2017 van Putten
ů(0) ů(0) mů(t)=-mg

44
— total flight time
Integrate once
&u(t)− &u(0) = −gt : &u(t) =V − gtIntegrate a second time
u(t)− u(0) =Vt − 12gt 2 : u(t) =Vt − 1
2gt 2
u(T ) = 0 : T =2VgTotal flight time
&u(t*) = 0 : t* =
Vg
Time at maximal height
(c)2017 van Putten
ů(t) - ů(0) ů(t)
ů(t)
ů(t)

45
— jump height
u(t) =Vt − 12gt 2 =VT y τ( ), y τ( ) = τ 1−τ( )
Parabolic trajectory
τ =tT
expressed in dimensionless time
For parabolic curves: max y τ( ) = 14
τ =12
⎛⎝⎜
⎞⎠⎟
Maximal height reached:14VT =
V 2
2g
(c)2017 van Putten
=Ekmg

46
— duration of flying high
y(τ ) = 18 y = τ (1−τ ) = 1
4− τ −
12
⎛⎝⎜
⎞⎠⎟
2
18= τ −
12
⎛⎝⎜
⎞⎠⎟
2
: τ ± =12±
12 2
Solve
t+ − t−T
= τ + −τ− =12≅ 0.71
Relative time of flight above one-half the maximum height is
1/4
1/8
u(t)
t
H
H/2
y(τ )
τ
(c)2017 van Putten

47
Aside: Kepler orbits
(c)2017 van Putten

— polar coordinates
The trajectory of A is an ellipse: r + s = c (c is some constant)
-p px-axis
oϕ γ
A
r sr sinϕ = ssinγr cosϕ = 2p + l cosγ⎧⎨⎩
r2 = s2 + 4 pscosγ + 4 p2
scosγ = r cosϕ − 2ps = c − r
⎧
⎨⎪
⎩⎪
Write out
r(ϕ ) =
12c − 2p
2
c
1− 2p2
ccosϕ
(c)2017 van Putten48

r(ϕ ) = a 1− e2
1− ecosϕ
— ellipticity
-p px-axiso a
A1 : 2(a + p)− 2p = c
A2 : 2 p2 + b2 = c
A1
A2
p ≡ ea
b a = p2 + b2 , c = 2a
Ellipticity e:
p2 + b2
(c)2017 van Putten
In Newton’s theory, u=1/r is harmonic in phi, unifying elliptic and hyperbolic orbits.
49





























![[Kibble] - Classical Mechanics](https://img.dokumen.tips/doc/110x75/552056344a79596f718b4715/kibble-classical-mechanics.jpg)