Embed Size (px)
DESCRIPTION
The fundamentals and applications of power electronics are thoroughly discussed with mathematical derivations, a lot of numerical examples and clarifying images. This enables both students and professionals to study power electronics in depth.
Citation preview

ELECTRONIC POWER CONTROL
The textbook Electronic Power Control consists of two volumes: Power Electronics and ElectronicMotor Control. The fundamentals and applications of power electronics are thoroughly discussed withmathematical derivations, a lot of numerical examples and clarifying images. This enables bothstudents and professionals to study power electronics in depth. The author has more than 40 years ofexperience in teaching on the subject. Thousands of students (engineering, electronics) found a usefulcompanion in this book. The seventh edition of the Dutch textbook, which is the result of continualupdating, is now also available in English. The book is in full colour and includes a glossary containingmore than 660 technical terms translated in Dutch, German and Spanish.
An indispensable companion for engineers and other specialists in the field of power electronics
Volume 1 - Power Electronics
ISBN 9789038217918 504 pages ! 33.00 (VAT incl., shipping and handling excl.)
! Click here to order

Volume 2 - Electronic Motor Control
ISBN 9789038219110 404 pages ! 30.00 (VAT incl., shipping and handling excl.)
! Click here to order
TABLE OF CONTENTS
Volume 1 - Power Electronics
PART 1 - SEMICONDUCTOR SWITCHES
1. PHILOSOPHY OF POWER CONTROL1. Controlling of electrical energy using switches2. Switching matrix3. Controllable semiconductors4. Properties of switches5. Commutation6. Power converters7. Power frequency domain8. Evaluation
2. POWER DIODES1. Semiconductors2. I-V characteristic of a junction diode3. Power diodes4. Data of a power diode5. Excerpts from data books6. Evaluation
3. TRANSISTOR POWER SWITCHES1. Bipolar junction transistor (BJT)2. Power MOSFET3. IGBT4. Evaluation
4. THYRISTORS1. Shockley diode2. Silicon controlled rectifier (SCR)3. Diac4. Triac5. Gate turn off thyristor (GTO)6. Mos controlled thyristor (MCT)7. Integrated gate commutated thyristor (IGCT)8. Evaluation
5. NOTES1. Electrical and mathematical notation2. Opto-electronics3. Hall effect sensors4. Heat dissipation from semiconductors5. Colour code for resistors / Non-inductive resistors6. Normalisation of resistor and capacitor values7. Colour code for capacitors8. Type indication of semiconductors and integrated circuits

9. The skin effect10. EMC-EMI11. Si-surface area of power switches12. Size winding wire (AWG = American wire gauge)
6. COMPUTER SIMULATIONS1. Introduction2. History: analogous simulations3. SIMULINK: simulation with block diagrams4. SPICE: simulation of an electric network5. CASPOC: the multilevel model
PART 2 - POWER CONVERTERS
7. UNCONTROLLED RECTIFIERS WITH INDUCTIVE LOAD1. Current flow of an inductive circuit with a sinusoidal supply2. Current and voltage waveforms of an inductively loaded single-phase rectifier3. Approximations in the study of rectifiers4. Half-wave three-phase rectifier. Resistive load5. Three-phase bridge circuit6. Table 7-3: single-phase rectifiers7. Table 7-4: three-phase rectifiers8. Evaluation
8. LINE-FREQUENCY PHASE-CONTROLLED RECTIFIERS1. Half-wave single-phase controlled rectifier (E 1 ). Resistive load2. Resistive and inductive loaded E 1 -controller3. Table 8-1: Single-phase power control4. Harmonics in the case of phase-controlled sine wave5. Distortion power6. Full wave B2-controlled rectifier . Resistive inductive load7. Fully controlled B6-rectifier. Resistive load8. Fully controlled B6-rectifier. Resistive and inductive load9. Full controlled B6-rectifier: dead time, harmonics
10. Twelve-pulse controllers11. Evaluation
9. AC-CONTROLLERS1. AC-controller with phase-control2. AC-controller with integral cycle control3. Turn-off snubber for thyristors4. Solid state relays5. Radio interference suppression (RFI) of thyristors6. Evaluation
10. CYCLOCONVERTERS1. Continuous cycloconverter2. Trapezium cycloconverter
11. CONTROL OF THYRISTORS1. Firing pulses2. Pulse transformers3. IC for phase control of thyristors and triacs4. Triac control with a diac5. Evaluation
12. CHOPPERS1. Operating principle of a chopper2. Control modes3. Resistive and resistive-inductive loaded choppers4. Chopped resistor5. Chopper control IC’s6. Evaluation
13. SWITCH-MODE POWER SUPPLIES1. Basic principles of switch-mode power supplies2. Basic converter configurations3. Isolated switch-mode power supplies4. Flyback converter5. Forward converter6. Converter control strategies7. Two-transistor SMPS of the forward type8. Forward with multiple outputs9. Full-bridge of the buck type
10. Synchronous SMPS11. SMPS components12. Overview of SMPS up to 2500 W13. Non ideal waveform14. Digital control of an SMPS15. Evaluation16. The design of switch-mode power supplies
14. INVERTERSA. THREE-PHASE INVERTERS
1. Voltage source and current source inverter2. Switching matrix of a voltage source inverter3. 180°-type inverter4. Pulse frequency inverter with a constant DC-voltage5. Pulse width modulation (PWM)6. PWM-strategies

7. Harmonics in a PWM-wave8. 120°-type inverter9. Common switches used in inverters
10. Control circuit for three-phase inverter bridge of the 180°-typeB. SINGLE-PHASE INVERTER
1. Basic circuit of full bridge inverter2. Unipolar and bipolar PWM3. Full bridge with unipolar PWM4. Harmonics with unipolar PWM5. Evaluation
15. APPLICATIONS OF POWER ELECTRONICS1. Uninterruptible power supplies2. High-frequency inductive heating3. Power factor correction (PFC)4. Lighting5. Renewable energy
A. Wind turbinesB. Photo voltaic solar panels
6. Drive technology7. Motion control8. High frequency induction cooking plate
Volume 2 - Electronic Motor Control
16. ELECTRIC MACHINES1. Static transformers2. DC commutator machines3. Three-phase asynchronous motors4. Synchronous machines5. Small appliance motors
17. DRIVE SYSTEMS1. History2. Control theory3. Types of drive systems4. Electronic drive technology5. Useful mechanical formulas6. Moment (of torque) and power of a motor7. Run out test to determine moment of inertia of a load8. Numeric examples
18. CURRENT-, ANGULAR POSITION-, SPEED TRANSDUCERS1. Current sensors2. Angular position sensors3. Speed sensors
19. SPEED and (or) TORQUE CONTROL of a DC-MOTORA. DC-MOTOR supplied from an AC POWER GRID
1. Control of an independently excited motor2. M-n curves3. Regulated single quadrant drive4. Two quadrant and four quadrant operation5. Functional control diagram of a single quadrant drive6. Optimising controllers7. Numeric example
B. DC-MOTOR supplied from a DC SOURCE1. Chopper controlled drive2. Chopper control of a series motor
Traction serviceLine filter
20. SPEED- and (or) TORQUE-control of THREE-PHASE ASYNCHRONOUS MOTOR1. Three-phase asynchronous motor2. Electronic control of an induction motor3. Scalar regulation of induction motor speed4. Slip control5. Scalar frequency converters6. Indirect frequency converter of the VSI-type7. Vector control8. Microelectronics with power electronics9. Softstarters
10. Indirect frequency converters with a current DC link (CSI)21. ELECTRONIC CONTROL of appliance motors, switched reluctance motor, synchronous three-phase motor, induction
servo motor1. Appliance motors
Universal motorSingle phase induction motor
2. Switched reluctance motor3. Synchronous AC motor4. Three-phase induction servo motor
22. ELECTRICAL POSITIONING SYSTEMS1. Servomechanisms2. Electrical positioning systems. Definitions3. Position control with DC servomotor4. Position control with brushless DC motor

5. Position control with stepper motor6. Position control with AC servomotor7. Position control with linear motor8. Computer guided motion control9. An integrated system (SIMOTION from Siemens)
23. e-MOBILITY1. Renewable energy2. Electrical traction3. Electrical automobiles4. Electrical boats5. Electrical bicycles

THE PHILOSOPHY OF POWER CONTROL 1.77. POWER FREQUENCY DOMAIN
Fig.1.1illustratesthestateoftheartinpowerswitches.CurrentlyweseethatwiththeexceptionofanSCRof8.5kVthatthyristorsarelimitedto4kV-4kA.Thisisamaximumof16MWperswitch.Thisisconsideredthemidpowerdomain. These days an SCR is also known as Phase Controlled Thyristor (PCT). ThereareforexamplesingleIGBT’sof1200V-3600A,1700V-2400Aand3300V-1500A. InahalfbridgeusingIGBT’satypicalratingwouldbe1700V-1000A. Stateoftheartcomponentsuse125mmSiwafers.
Fig 1-11: Propertiesofpowerswitches
SCR
IGCT
IGBT - module
4 kA
3 kA
2 kA
1 kA
2 kV 4 kV 6 kV 8 kV
MOS-FET
100 Hz
1 kHz
10 kHz
100 kHz
1 MHz
10 MHz
GTO
Intensity kA
VoltagekV
Frequency
Hz
TransportofelectricalenergyoverlongdistancescanbemoreeconomicalusingDCtransmission.Forexamplewhen the distance is greater than 250 km then transmission of 400kV-1200MW is more economical using HVDC (highvoltagedirectcurrent).Withsubmarinecablesthedistanceisevenshorter.InChinaandBrazilwherelargehydroelectricpowerstationsaremorethana1000kmfromthebigcitiesHVDCisused. Example:theUltraHighVoltageDC(UHVDC)of800kVbetweenXiangjialaandShanghai.ThefirmABBdevelopeda6-inch8.5kVthyristorforthisapplication. AnotherapplicationofHVDCistheconnectionbetweenAC-gridsofdifferentfrequencies.AnexampleistheGarabibacktobackstationwhichconnectsthe60HzgridofBrazilandthe50HzgridofArgentina.

3.14 TRANSISTOR POWER SWITCHES
0 10 20 30 40 50 0
ID
(A)
10
8
6
4
2
10
8
6
4
2
9V
8V
7V
6V
5V
4V
(a) (b)
VDS
VGS
(V) (V)
VGS
ID
(A)
VDS
= 30V
1 2 3 4 5 6 7 8 9
a
Vthreshold
DID
DVGS
7,754,75
VGS
(a)
G
D
S
RD
VDD
N+
N+ P
depletion layer
ID
induced N-channel
– +– +– +– +– +– +– +– +
D
S
G
RD
ID
VDDV
GS
(b)
2.3 Operation
IfapositivevoltageV GS isapplied(fig.3-15a)thenasaresultofelectrostaticinductionanN-zoneiscreatedinthePstructurebetweenthetwoexistingN+-zones.SincetheN-zoneconsistsofminoritychargecarriers(fromthePsubstrate)werefertothisasaninversionlayer.Source(S)anddrain(D)arenowconnectedviatheN-channelandwithapositivevoltageV DS a current I D will flowfromDtoS.ThelargerV GS , the wider the N-channel and the larger the current I Dwillbe.Infig.3-15baschematicrepresentationoftheconfigurationoffig.3-15aisshown.
Fig. 3-15: OperationandprincipalconfigurationofaN-channelenhancementtypeMOSFET
2.4 Mosfet characteristics
Thecharacteristicinfig.3-16aisanalogoustotheI C - V CE-characteristicofabipolartransistor.InthecaseofaBJTwecontrolthetransistorwiththebasecurrent,whilewithaMOSFETweworkwithvoltagecontrol.Thedraincurrentconsistsofonetypeofchargecarrierthereforewerefer to a MOSFET as a unipolar transistor in contrast to the BJT.
Fig.3-16(aandb):Characteristics of an N-channel enhancement MOSFET

TRANSISTOR POWER SWITCHES 3.15
g fs =( ∆I D
_____ ∆V GS
)with V DS = C te ; g fs =tgα
Fromtheoutputcharacteristicwecanderivethetransfercharacteristic(fig.3-16b).Thistransferprovidesuswithaveryimportantspecification,namelythetransconductance:
(3-6)
Infig.3-16bweseethatthegatevoltagemustexceedacertainminimum V GS(th) beforethe MOSFET conducts.The SiO 2layerbetweenthegateandsourceisresponsiblefortheveryhighinputresistanceofthe MOSFET ( 10 10 to 10 15Ω).Asingleelementaryunitasshowninfig.3-14isonlycapableofhandlingadraincurrentof100µA.Theparallelcombinationofforexample100,000 similar elementary units results in a MOSFETwithadraincurrentofseveralampsasshowninfig.3-16a.
Fig.3-16cshowsthecompleteI - V characteristic with the three distinct regions: 1. Cut-off:Withthegatevoltagebelowtheturn-offvoltageV GS(th.)thereisnocurrentflowand the MOSFETandfunctionsasanopenswitch.Inthecharacteristicthebreakdownvoltage BV DSS of the MOSFETisshown.Thismeansthattheapplieddrainsourcevoltagemustbeless than this BV DSS BV=Breakdownvoltage;DSS=Drain-Sourceinthecommonsourceconfiguration. 2. Active region:Inthisregionwehaveanalmostlinearrelationshipbetweendraincurrentand gate source voltage ( i D = g fs . u GS ) 3. Ohmic area: WithaBJTtheborderbetweentheactiveareaandsaturationisgiven byV CE = V BE or V CB=0,seefig.3-5.InsimilarfashionforaMOSFETtheborderbetweenthe activeareaandsaturationisgivenby:V DG =0 or V GS − V GS(th.) = V DS . When V DS is low, every value of V GS endsupontheborderlineintheI D − V DS characteristic. Theseborderlines(fig.3-16c)allhavethesamerampirrespectiveofthevalueV GS . On the borderlinetherelationshipbetweenI D and V DS ispracticallyconstant,theMOSFETbehaves as a resistor R DS . We refer to an OhMicoperatingarea.InthisareaorregiontheMOSFET functionsasaclosedswitch.Werefertotheresistanceofthis“closed”(MOSFET) switch as R DS(ON) . The value of R DS(ON)followsfromtherampoftheborderlinein fig.3-16c,butthisisalsotobefoundinthedatasheetoftheMOSFET.
Fig. 3-16c : OperatingregionsofanN-channelMOSFET
0
10
8
6
4
2VDS
(V)
VGS
10 20 30 40 50 60 70 80 90 100
limit curves
Ohmic
CUT - OFF
9V
8V
7V
6V
5V
4V
ID
(A) [ vGS
- VGS(th)
= vDS ]
VGS(th)
Acitve
area
BVDSS(c)

3.36 TRANSISTOR POWER SWITCHES
N+N+
N-
collector C
emitter E
AlSiO2
gate G
P
P P
N+N+
N-
collector C
emitter E
Al
CGE
CGC
T2
T1
RD
R1
SiO2
RBE
CCE
gate G
P
PP
3 IGBT
AsweknowabipolartransistorhasalowV CEsat even with a large current (also with high voltage transistors).ApowerMOSFETincontrastrequiresonlylowgatepowerandcanoperateathighfrequency.IntheconstructionofanIGBT(InsulatedGateBipolarTransistor)themanufacturerssoughttocombinethebenefitsofthebipolartransistorandtheMOSFET.ThefirstdesignofanIGBT dates from 1980.
3.1 ConstructionFig 3.35a shows the construction of a single IGBT cell. Here in the N +−substratefromtheMOSFEToffig.3-20hasbeenreplacedwithaP-substrate.AnIGBTismadeupofthousands ofsuchcellswhichareallconnectedinparallel.Forfurtherstudyadiagramofasinglecell
isshownandthisisconsideredasbeingrepresenta-tiveofthecompleteIGBT.Analogoustofig.3-20theinternalparasiticcomponents(T1 , T 2 , etc) are representedinfig.3-35b. Infig.3-35band3-36notethatanN-channelMOS-FETispresentandaPNPtransistorT1.TheparasiticNPNtransistorfromfig.3-20isalsopresent. If T 2anditscorrespondingR BE are neglected then fig.3-37aandbarearudimentaryequivalentdiagramoffig.3-36.
(a) Construction
(b)IGBTwithinternalparasiticelements
Fig. 3-35: Construction of an IGBT

TRANSISTOR POWER SWITCHES 3.37
N-
T2
T1
RBE
CCE
RD
collector C
R1
CGC
CGE
gate G
emitter E
T1
collector C
CCE
CGE
CCG T1
G
emitter E
gate G
C
(b) (c)(a)E
C
C
E
E
G
G
C
E
G
I
ID
R1
R
Theequivalentcircuitasdrawninfig.3-37bconsistsofaPNPtransistorcontrolledbyanN-channelMOSFETinapseudo-Darlingtonconfiguration. SincethereisaMOSFETintheinputandatransistorintheoutputthesymbolsusedinfig.3-37careeasilyunderstood. Inthetextthebottomsymbolofthethreewillbeused. AttheinputtheIGBTbehavesasaMOSFETandattheoutputapproximatelythebehaviourofaBJT.
3.2 Operation
Fig. 3-36: Equivalentdiagramforfig.3-35b
Fig. 3-37: ReducedequivalentdiagramofanIGBTandsymbols
ThephysicaloperationofanIGBTmorecloselyresemblesthatofaBJTthanapowerMOSFET.ThereasonisthattheP-substrateoftheIGBTisresponsibleforinjectingtheminoritycharge carriers in the N −-layersothatconductionismuchbetterthanwithaMOSFETthatworkswithmajoritychargecarriers.SincenohighvoltageexistsacrosstheMOSFETpartwecanforcon-structionpurposesusealowvoltagetype.LowvoltagetypeshavealowR DS(ON) asimportantchar-acteristic.ThebaseofthePNPhasnoexternalconnectionwhichisexpressedintheuppersymboloftheIGBTinfig.3-37c.Intheequivalentdiagramoffig.3-37aitisclearthatthevoltagedropiscomposedoftwoparts:ononesidethediodevoltagedropacrosstheemitter-basejunctionofT1 andontheothersidethevoltagedropacrossR D and the gating MOSFET. Since it is a low voltage MOSFETthevoltagedropacrossthisFETisdependentonthegatecontrolvoltage(thisisnotthecase with high voltage MOSFETS !). We write: (3-8) with I D =
I C
___ h FE V CEsat = V BE(T1) + I D .( R D + R DS(ON) )

TRANSISTOR POWER SWITCHES 3.51
N
P
N
P
Emitter
Collector
Emitter
Gate
N-
P
E
x
0
N
P
N
P
Emitter
Collector
Emitter
Gate
N-
P
E
x
N - buffer FS
0
3.5.2 Trench NPT-IGBT The NPT-trench structure was designed to reduce V CEsat and the switch-off losses E off (fig.3-48).IncontrastwithaplanarNPT-IGBTthetrenchtypehasalowerV CEsat , lower switching losses( E off ) and a lower thermal resistance R th . As a result of the trench structure the R DS(ON) iseliminatedfromtheparasiticMOSFEToffig.3-37asothat(3-8)becomes: (3-12) The trench has therefore a lower V CEsat thantheNPTshowninfig.3-46.
3.5.3 Trench-fieldstop (FS) structure Fig.3-49showstheimplementation.Incomparisontothetrenchimplementationoffig.3-48thethickness of the N −-baseismuchreducedandthereisalightlydopedN-bufferadded.Fromthegraphofthefieldstrengthwecanseewherethenamefieldstopcomesfrom.SincetheN−-baseof a trench FS is much thinner than a trench the drift resistance R D islowerandexpression(3-12)shows that V CEsat isreducedincomparisontoatrenchIGBT.
V CEsat = V BE(T1) + I D . R D
Fig. 3-48: Trench structure of an IGBT Fig. 3-49: TrenchfieldstopIGBT

5.16 NOTES
2. OPTO-ELECTRONICS
2.1 LED (Light Emitting Diode) Thelightemittingdiode(LED)hasbeenusedforyearsasasignallamp,asnumberindicatorandasalightemittingtransmitterinanopto-coupler.InrecentyearstheLEDisbecomingevermorepopularasalightsource.Thisaspectisdealtwithinchapter15intheapplicationsofpowerelectronics.TheoperatingprincipleoftheLEDrestsonthereleaseofenergybydirectrecombina-tion of electrons and holes in a PN-semiconductor. This energy is released in the form of electro-magnetic radiation. In general this is: (5-29) with: W =energy(eV) h =Planckconstant=4.133x.10−15 eVs f =frequencyofelectromagneticwavesinHz.Inthespecificcaseofasemiconductorwefind:W= W g =energygaporbandgapbetweenthevalenceandconductionband.Thisenergygapisalsotemperaturedependent.SihasaW=1.12eVat0K(=−273°C)andthisbecomes1.1eVat300K(roomtemperature).Thewavelengthofthereleasedradiationisgivenby: λ= c __
f = 300 . 10 6
__________
f = 300 . 10 6
__________ W g .h= 300. 10
6 x 4.133 x 10 −15
_________________________
W g = 1239 ______ W g
(nm) Herein c=300,000km/s=speedoflight.Tohavecontinuousradiationwerequirecontinuousrecombinationtooccurbetweenelectronsfromtheconductionbandandholesfromthevalenceband.Thiscontinuousprocesscanbeob-tainedbyaforwardpolarisedPN-junction(e.g.withI F =20mA).Toobtainvisiblelight(λ=400to700nm,seefig.5-36)W g mustliebetween1.77and3.1eV.ThesemiconductormaterialmostoftenusedfortheconstructionofLED’sis3-5crystalswiththefollowingconfiguration:.group3:Ga,Al. group5:As,P,N. Thedifferentcombinationsandimpuritiesleadtodifferentwavelengthsoftheradiatedlight.Thespectrumofagalliumphosphide-LED(GaP)canbeyellow(λ=575nm)togreen(λ=560nm).Gallium-arsenidephoshide(GaAsP)emitsyellow(λ=590nm)toredlight(λ=650nm).GaAshasanenergygapofabout1.43eVsothatλ=900nmandGaAscanoperateasaninfraredtransmitter(IRED=infraredemitter).Fig5-35showsthecurvesthataccompanyaGaAsP-LED.
Remarks 1. WithnominalcurrenttheforwardvoltagedropofaLEDisbetween1.3to3Vdepending onthethetypeofsemiconductorandtheimpurities. 2. WiththepassingoftimeLED’sstarttoage:theradiatedpowerdecreases.Highcurrentsand highambienttemperatureshaveadisastrouseffectontheagingprocess.Aloadoperates classically with I F =20mA,butifalowerlightintensityisrequiredanI F =5or10mAisused.3. Fig. 5-35d shows a LED as indicator. With V=12V;I F =10mAandV F =1.6Vthevalueof thecurrentlimitingresistorbecomes:R V =
V− V F ______ I F = 12 − 1.6 ________ 10 ≈1kΩ
W=h.f
!

NOTES 5.17
intensity
100
590(a) Spectral curve
(%)
l (nm)
mW
100
10(b) Radiated power
IF (mA) VF (V)VF
IF (mA)
10
1,6(c) forward
characteristic (d) LED-indicator
circuit
IF RV
V
700680600
500
400
300
200
100
0
VIOLET
CIE CURVE
RED
human eye (receiver)(Lm/W)
BLUE
GREE
N
YELL
OW
AMBE
R
Ga As (transmitter)100%
75
50
25
300 400 500 600 700 800 900 1000 1100 1200
λ (nm)
% re
lativ
e se
nsiti
vity
ultraviolet infrared400
420 460 525 595 650 725
500 600 700 800 nm
violet green orange
blue yellow red
infrared
Ga As Zn
Ga As P6
Ga As P4Ga P:NLED-materials
Lum
ens
/ Wat
t tra
nsfo
rmat
ion
Ga AsP82:N
silicon
Fig. 5-35: Curves of a GaAsP-LED
2.2 Spectral sensitivity
Infig.5-36wedraw: 1. ThestandardhumaneyecurvepreparedbytheCommissionInternationaledel'Eclair (theCIE-curve).Thiscurvenotonlyprovidesthesensitivityoftheeyeatdifferentwavelengths butalsothelumens/wattconversionofthelightsourceatthatparticularfrequency. 2. ThespectralcurveofaGa-Astransmitter(LED). 3. The wavelength of maximum sensitivity of other LED-materials. 4. Thesensitivityofasilicondetector(diode,transistor).ItisclearwhyGa-ASLED’sareused withan(Si-)transistorordiodeasopto-coupleelements.
Fig. 5-36: HumaneyecurvesandspectralsensitivityofLEDsandSi-detectors

NOTES 5.19
Fig. 5-38: Si-photo-voltaiccell
Fromfig.5-36itfollowsthatSi-photo-voltaiccellsaresensitiveforlightwithawavelengthofbe-tween400and1100nm.Thiscellsareespeciallysensitiveforredandinfraredlight.Alogarithmicscalelinksphoto-emf(V ) and illuminance (lux). If we connect a resistor R b acrossaphoto-voltaiccellthenwecandeterminetheoperatingpointofthiscircuit(fig.5-39).Fromtheproductofthephoto-emfandthecurrentproducedwefindthepowerthatthecellgives.Intheexampleoffig.5-39wefindamaximumpowerof27.8mWwithaloadresistorof2.52kΩ.WealwaysattempttoloadaPV-cellwithanoptimalresistorsothatmaximumpowerisobtainedattheexistingillumination.ThisoperatingpointisindicatedastheMPP(maximumpowerpoint).
NotethePV-cellcanbeshortcircuitedandthenhasacurrentofI SC . Infig.5-29thisshortcircuitcurrent I SC =0.15mAandtheopencircuitphotovoltaicemfisabout0.45V.Toincreasethevoltageandrequiredcurrentweformbatteriesofphotovoltaiccells.Thesearecalledsolarbatteriesorsunpanels.Thesedaystheyarebeingmoreandmorepromotedasacleanenergysource.Thiswillbedealtwithinchapter15.Photovoltaiccellsareusedincontrolcircuits,lightmeasurementof visibleandalmostinfraredlight,topowercalculatorsandphoto-electricrelays,etc.
Fig. 5-39: Optimumoperatingpointofaloadedcell
P PN Nm
etal
met
al
VV
dd
I Rb
E
(lux)
( a ) ( b )
V F
Rb= 2,52 kΩ
Rb= 4 kΩ
Rb= 10 kΩ
Rb=1kΩ
E=5000lux
16mW
26mW
27,8mW
19mW
I F
(mA)
0,05
0,10
0,10 0,2 0,3 0,4 0,5
0,15
(V)
MPP

5.20 NOTES
Photo Ixys (KWx): SolarBIT'saremonocrytallinePV-cellswithahighdegreeofefficiency(17%). Spectralsensitivity300to1100nm.Thesolarbitexistsindifferentvoltage-currentconfigurations(see www.ixys.com).Examples:XOB17-12x1:0.69V-39mAwithanMPPof0.51V-39mA. XOB17-04x3:MPPof1.51V-11.7mA.
3. HALL-EFFECT SENSORS
3.1 Hall-effect
IfweplaceacurrentcarryingconductororsemiconductorinaperpendicularmagneticfieldB (fig.5-40a)thenanelectricfieldarisesperpendiculartotheI-B surface. This effect is known astheHall-effect.Thiseffectwasdiscoveredin1879bytheAmericanphysicistEdwinHerbertHall.
Fig 5-40: Hall-effect
y
Ib
d
1
2
I(A)
X
ZB(Wb/m2)
bI I
IB
+
-
VH
VHX

5.40 NOTES
A second method involves a metal enclosurewhichincludesabridgingcapacitor(linebypasscapacitor) C y asshowninfig.5–55.Thedistur-banceflowsviathesignallinesandvia C y backtothecasingandviathestraycapacitancetothesourceofthedisturbance.
Fig. 5-55: Applicationofametalenclosure
Fig.5–56showsanexampleofanEMI-filtercommonlyusedinthesupplycableontheAC-inputsideofequipment(forexampleacomputer).
Remarks 1. Inthecaseofasinglephasemainsthedifferentialmodecurrentconsistsofthe50Hz-current togetherwiththedisturbance.Thecommonmodedisturbancesnormallyhavehigher frequencies(10kHzto10MHz).Theyflowviaparasiticcapacitancesbacktothesourceof noise. 2. A C y isplacedbetweeneverylineandthemetalenclosure.This"linebypasscapacitor"is usually only a few nF, and this is to limit the leakage current V.ω. C y .3. Practicalvaluesforthecommonmodechokeareforexample500µHupto2mH. 4. C x (across-the-linecapacitor)suppressesthedifferentialmodedisturbance.Apracticalvalue isforexample0.015µF. 5. Inthecaseofafrequencyconverter,dependingonwhetheritisasinglephaseorthree-phase supplyanappropriatefilterisincludedintheinput.
Fig. 5-56:EMI-filteratthesupply-sideofequipment
!
SMPSx xC
C
C
C
y
y
load0.015µF 0.015µF
2mH
2mH
2200pF
2200pF
mains
N
ZL
reference ground
noise
signal source
metal package
C Cy y(line bypass capacitor)(stray-
capacitance)

COMPUTER SIMULATIONS 6.5
Fig. 6-5: Classificationofanaloguesimulators
K=compliance;K=rotationcompliance;M a=acousticinertia;C a =acousticcapacitance;f=translationfriction;f=rotationalfriction;R H=hydraulicallyresistance;r a =acousticresis-tance; J=momentofinertia;M =momentum(oftorque);v=speed;v=voltage
ANALOGUE SIMULATORS
INDIRECT
MECHANICAL HYDRAULICALLY ELECTRIC MECHANICAL HYDRAULICALLY ELECTRIC
DIRECT
planimeternomograph
...
unusual opamp(dierentialamplier)
(analogue computer)...
wind tunnel...
hydraulical labs
river beddam model
...
equivalentecircuits
networkanalyser
...
scale models
ParameterMechanical
Electric Hydraulically AcousticTranslation Rotation
Appliedforce F M i p P
Speed v ω= dϴ ___ dt v Q(massflow) c= dx __ dt
Displacement s= ∫ 0
t
v.dt ϴ ∫ 0
t
v.dt Q(mass) x
Acceleration a= dv __ dt dω ___ dt dv __ dt dc __ dt
Pulse ∫ 0
t
F.dt ∫ 0
t
M.dt ∫ 0
t
i.dt ∫ 0
t
p.dt ∫ 0
t
P.dt
Power F . v M.ω v . i q.p P.c
Inertia m . dv __ dt J. dω ___ dt C. dv __ dt M a . dc __ dt
Elasticity K K L C H C a Coefficientoffriction f f R R H r a
Momentum (of torque) J. dω ___ dt ; f. dϴ ___ dt ;K.ϴ
Kinetic energy 1 _ 2 . m. v 2 1 _ 2 . J. ω 2 1 _ 2 . C. v 2 1 _ 2 . M a . c 2
Potential energy 1 _ 2 . K. s 2 1 _ 2 . K. ϴ 2 1 _ 2 . L. i 2 1 _ 2 C H . p 2 M a .xDissipatedenergy 1 _ 2 . f . v 2 1 _ 2 . f. ω 2 1 _ 2 . R. i 2 1 _ 2 . R H . p 2 1 _ 2 . r a . P 2
2.2 Analogies between physical systems
2.2.1 Table 6-1: Similarities between different physical quantities

LINE-FREQUENCY PHASE-CONTROLLED RECTIFIERS 8.34. Disadvantagesofphasecontrol: .poorpowerfactor; . thyristor has to deal with a large di/dt ; .resultsinharmonicscausingradioandTVdisturbance.1.5 Voltage form across the thyristor
0
0
0
180 360 540 720
ωt°
ωt
ωt
ωt
ωt
vs (v)
5
(b)
(a)
(c)
i0
0
0
vRb
vT
α
α
α α
α
(d)
(e)
IH IH
≈ 1,6V
v0
vT
i0
vs Rbv
SCR
v0
^
v
v
^
^
β
v
2
2
2
2
4
+
Aslongasthethyristorisnotfired(between0°and α)wecancompareitsbehaviourtoanopenswitch. The voltage across its terminals follows faithfullythesupplyvoltage.Seefig.8-1e. TheforwardvoltagedropacrossaconductingSCRisapproximately1.6V.Afterthethyristorswitchesoff(isextinguished)becausethei o has fallenbelowI H , the voltage again follows the supplyvoltage.
Fig. 8-1: Circuit and waveforms of a resistive loaded E 1 - controller.

LINE-FREQUENCY PHASE-CONTROLLED RECTIFIERS 8.17 Numeric example 8-4: Given:Fig. 8-1 with R b =10Ω ; V line =230V-50Hz;α=90°;V T=0. Required:Determine P, S,displacementfactor,distortionfactor,powerfactor,Q 1 , D . Solution:. Fundamental harmonic of current p.8-11:A 1 =81.32 V ; B 1=− 51.77 V ; X 1=96.4V;V 1=68.16V I 1 =6.816A;φ 1=bgtg
B 1 __ A 1 =−32°48’;I 1P = I 1 . cos φ 1=5.75A
. RMS value of current Table8-1:V RMS=0.5x230=115V;I RMS=
115 ___ R b =11.5A . Activepower: P=V RMS . I RMS=115x11.5=1322.5W
or: P= V line . I 1P=230x5.75=1322.5W . Totalapparentpower S=V.I=230x11.5=2645VA . Apparentpoweroffundamentalharmonic S 1 =V. I 1=230x6.816=1567.68VA . Displacementfactor cos φ 1 = P __ S 1 =
1322.5 ________ 1567.68 =0.8436 . Distortion factor
cos δ= S 1 ___ S =1567.68 _______ 2645 =0.5926
. Power factor
λ=P __ S =1322.5 ______ 2645 =0.5 . Reactivepoweroffundamentalharmonic
Q 1 = √__________
S 1 2 − P 2 =841.8var . Distortionpower
D= √__________
S 2 − S 1 2 = 2130.35 var

LINE-FREQUENCY PHASE-CONTROLLED RECTIFIERS 8.57
11. EVALUATION
8.1 InwhichspecificsituationdoesanSCRrequireadoublepulse?Why? 8.2 Whatarethedisadvantagesofusingphasecontrolwiththyristors? 8.3 ForanSKT600(Semikron)weassumethatthemaximumambienttemperatureis50°C and that R thj-a =0.11°C/W.WhatisthemaximumpermissibleI T(AV) ? What is then thepowerdissipationinthethyristor?TheSKT600datacanbefoundonp.4.15and p.4.24/25. 8.4 Whyaresomepowerelectroniccircuitscallednaturalcommutatingcircuits? 8.5 WhatisthemaximumRMSanodevoltagethatisallowablewithanSKT10/08Dconfigured asacontrolledrectifier(E1 -controller)?8.6 Intheconfigurationshowninfig.8-10V line =400V.Whatistheaveragerectifiedoutput voltage when α=135°andforα=100°.8.7 Whatismeantby“miss-firing”ofaninverter?Howcanthisbeprevented? 8.8 Whatdoestheexpression“distortionpower"means? 8.9 Whatisthemaximumpowerfactorofafullcontrolledbridge? 8.10 Infig.8-20thefollowinginformationisprovided:R b =10Ω,L b =150mH,transformer andthyristorareideal,linevoltage230V-50Hz.Determinewithafiringangleofα =0° and60°:theoutputDCvoltage;outputcurrent,powerfactor,displacementfactor,distortion factorandreactivepower. 8.11 Whichspecificationsshouldthethyristorsinfig.8-20havegiventheinformationinthe previousquestion. 8.12 Determine the maximum inverse voltage of the semiconductors in the situations shown in fig.8-19and8-21. 8.13 DeterminetheDCoutputvoltageforthecircuitshowninfig.8-9ifthesupplyvoltageis 230V-50Hzandthefiringangleisrespectively60°and105°. 8.14 Infig.8-3thesupplyvoltageis230V-50Hzandtheloadiscomprisedof7.255Ωand 40mH.Determinetheaverageoutputvoltageifthefiringangleis60°.Inadditiondetermine thespecificationsthethyristorneedstocomplywith. 8.15 The full controlled B 2 -controlleroffig.8-9isconnectedtoa230V-50Hzsupply.Theload iscomprisedof7.255Ωand40mH.Calculatetheaverageoutputvoltageifthefiringangle isrespectively30°,60°,90°. 8.16 Determinethelargestinversevoltageacrossthethyristorinfig.8-1.Whatisthelargest possibleblockingvoltageacrosstheSCR?Forwhichvalueofαdoes this occur? 8.17 Set α=120°intheconfigurationoffig.8-20.Canthebridgebebroughtintoconduction? Confirmthiswithagraphicsuchasfig.8-21or8-23. 8.18 Considerthespeedcontrolofanindependentlyexcited100kWmotor. Thecurrentprotectionissetat1.5xdenominalarmaturecurrent.Howmuchreactivepower (kvars)doesthismotordrawfromthenetatstart-up? 8.19 Weconsiderahalfwaveandfullwavecontrolledrectifier,bothwithresistiveload.Let α=30°and150°respectively.Determinefortherectifierstheoutputpowerwithrespectto themaximumpossibleoutputpower(whenα=0°).Usetable8-1.

8.58 LINE-FREQUENCY PHASE-CONTROLLED RECTIFIERS
+- v0
RbLb
i3v3
i2v2
L1
L2
L3
(v1 = v.cosωt)
i1v1
Th3
Th2
Th1
i0
Fig. 8-40: M 3 -controller(halfwavefullcontrolledthreephasebridge)
8.20 Determine for the data used in question 8.10 with α=60°:theRMSvalueofthefundamen- talharmonicoftheinputlinecurrentofthebridge,RMSvaluesofthefifthandseventh harmoniccurrentcomponentsofthelinecurrent,RMSvaluesofthe300Hz-and600Hz- voltagecomponentsoftheoutput. 8.21 An E 1-controllerconnectedtoa230V-50HzhasaresistiveloadofR b =100Ω. Calculatetheamplitudeofthe150Hzcurrentintheloadwhenthefiringangleis60°and 90°respectively. 8.22 A full controlled B 6-controllerisconnectedtoathreephasesupplyof3x400V-50Hzwitha highlyinductiveloadof5Ω-280mH.CalculatetheRMSvalueofthe350Hzcurrentinthe supplylinewhenthefiringangleis30°.
8.23 Sketchtheoutputvoltagewaveformwithafiringangleαfor a highly inductive load in the following situations: a) fullwavefullcontrolledsinglephasebridge b)halfwavefullcontrolledthreephasebridge(M3,seefig.8-40lowerdown). Sketchinasimilarfashiontofig.8-34,aperiodicvoltagev o = f(x)and derive an expressionforωt=f(x).8-24 DeterminethemaximumoutputvoltagesforaB2 - controller, M 3 - and B 6 -controller. Thestartingpointisexpression(8-25). 8.25 Given a full control highly inductive loaded B 6 -controller. Calculate the ratio of the RMS valuesoftheharmonicsintheoutputwhenα=90°inrelationtoα=0°.Checkyouranswer withthevaluesfromtable8-4.

CONTROL OF THYRISTORS 11.7
3. CONTROL IC FOR SCR AND TRIAC
AnumberofcompaniesselllinearIC’sthatcanformpartofacontrolmoduleforthyristors.Itispossibletobuildatemperaturecontrollerforanoven,aspeedcontrollerforamotor,etc...withaminimumnumberofcomponents. WeconsiderjustsuchacontrolIC,theindustrystandardTCA785fromInfineon.
3.1 AC controller using a TCA785
TheoperationoftheTCA785isexplainedunderheading3.2. TheIChas16pins.TheICissuppliedwith15VDCviapin16andpin1. Infig.11-5theDCsupplyiscreatedwithrectification(1N4005),filtering(470µF)andzenerstabi-lisation (BZY97-C15). Todetectzerocrossoverofthesupply,pin5isconnectedtothesupplyvoltageviaaresistorR sync =220kΩ.The value of R 9(resistorconnectedbetweenpin9andground!)determinesthechargingcurrentI 10 thatlinearlychargescapacitorC 10 .Atpin10wehavearampvoltageinwhichtheslopeisdeterminedbyR 9 and C 10 . Thevoltageatpin11isregulatedwithapotmeterof10kΩandasaresultthefiringangleα can varybetween0°and180°. Pin15deliversafiringpulseduringthepositivehalfperiodofthesupplyvoltageandpin14doesthesameduringthenegativehalfperiod. Bypasscapacitorsareconnectedtopins1,11and13.InthiscircuitanACcurrentisphasecon-trolledasshowninfig.9-1.
230V
TCA 785
0,22µF
250V
4,7k
220k9W
1N4005
470µF
16V
15V
10k
0,47µF
RSYNC
BAY61
BAY61
1
2
3
4
5
6
7
8
16
15
14
13
12
11
10
9
BAY 61
BAY 61
22k
100k
4.7k
(bulb als a load)
0,1µF47nF
150pF
C10R9C12
2.2k
2.2µF (MKH)
150
L
triac
10k
R
Mp
BZY
97-C
15
inhibit
Fig. 11-5: PhasecontrolwithaTCA785fortriacswithagatecurrentupto50mA

12.12 CHOPPERS
5.CHOPPERCONTROLIC’S
5.1 Description of block diagram
470
470k
1k
150
150
100µF+-
Compensation
shutdown
oscillator (out)t
tv7
voltage regulator
Oscillator
Vref.
1
2
3
-+5V
8
10
2
1
7
6
3
16
15
9
5
4
14
13
11
12
faultamplifier
+-
comparator
+5V
7+-
+5V
6
5
-+
+5V
0,1µ 1k
10k
NORFLIP-FLOP
8
NOR9
4 Q
Q
270
470
470
2N2904
BC140
68-5W
Rb
RbD1
D2
Lb9,1V 3W
S
IRFN530
M
+24V
T1
T2
Fig. 12-14: Adidacticmodelofachopperwitha“1524”controlIC.ThisICworkswithasupplybetween8and40V(max), hasanoscillatorfrequencybetween100Hzand500kHzandhastwooutputtransistors(100mA)thatcanhandle a maximum collector voltage of 60V
The“1524”anditsderivativesisamuchusedIC-controller.Itfirstappearedin1976asthe“SG1524”(SG=SiliconGeneral)andquicklybecametheindustrystandardandtothisdayisof-feredbymanychipproducers(CA1524,LM1524,UC1524,XR1524,…). Fig.12-14showsadidacticmodelwhichallowsustostudyachoppercircuitwhenPWMisused.WithswitchSwecanchoosebetweenaresistiveload,aninductiveloadoramotorasload. TheinterfacebetweenICandswitchSwerecogniseasacontrolcircuitfromthestudyofthepowerMOSFET. The“1524”isapulsewidthmodulatedcontrollerforvoltagecontrollers.Thefrequencyisdeter-minedfromthefollowingexpression: (12-10) Here in is f inkHzwithR 6 inkΩandC 7 in µF. With R 6 and C 7 wemeanthediscretecomponentsthatareconnectedbetweenpin6and7oftheIC.Practicalvaluesare: 1.8kΩ< R 6 <500kΩ 0.001µF < C 7 < 0.1µF The value of R 6 determines the constant current which linearly charges C 7 . The sawtooth of +1V to+3.5Visappliedtothe(+)terminalofcomparator3. AflipflopmakessurethatonlyoneoftheNORgates8or9receivesalowinput.TheNORgatewhichhasallinputslowwillsaturateitsrespectiveoutputtransistorsT1 or T 2 . For this to occur thefollowingmustbethecase:V 3 =0Vandtheoutputofcomparator3shouldalsobe0V.
f= 1.18 _____ R 6 . C 7

CHOPPERS 12.13
v3
t (ms)
t (ms)
t (ms)
t (ms)
t (ms)
t (ms)
t (ms)
3
0 8 18
v7
1
0 8 1810 20
3.5
1.5
v9
0
1.5
vGS
0
8
8 10 18 20
v11/14
v11
0
22
8 10 18 20
v14
v11/14
v11
0
22
8 10 18 20
v14
vRb
22
80 10 18 20
vDS
0
24
1
8 10 18 20
(V)
(V)
(V)
(V)
(V)
(V)
(V)
An internal voltage controller 1 regulates the 5V(±1%)supplyoftheICandwhichcanbeex-ternally loaded to 20mA. TheoutputpulseV 3 ofoscillator2isa“blank-ing”pulsewho’sfunctionistopreventT1 and T 2 conducting at the same time. This is neces-saryifthetransistorsarenotinparallelasshowninfig.12-14,butwhereforexampletheyoperateseparatelytocontrolabalancecircuit.Inthiscasethefrequencyoftheoutputvoltageishalfofthesawtooth frequency.
5.2 Operation of comparator 3
C 7 providesasawtoothvoltageof+1to3.5Vtothenoninvertingterminal(+)ofcomparator3.Ontheinvertinginput(−)ofthecomparatoravoltageisappliedwithfourpossibilities: A. Theinvertinginputissmallerthan+1Vso thattheoutputofthecomparatorishigh (+5V)andbothoutputtransistorsare blocking. Thiscanbeachievedby: 1) saturatingtransistor5viapin10sothat V CE < 1VandtheICblockswithin 200ns(shutdownprotection). 2) usingopamp7asacurrentlimiter. B. Avoltageofbetween+1Vand+3.5Vis addedtotheinvertinginputofthecompara- tor.AsaresultthepulsewidthattheIC outputiscontrolled. Wecanachievethisby: 3) linearly controlling the duty cycle via thefaultamplifier(6). 4) adding a voltage V 9 as shown in fig.12-14whichalsoregulatestheduty cycle. Inthismannerweseeinfig.12-15that with V 9 =+1.5Vthereisconduction between8and10ms(V 11 ) and between18and20ms(V 14 )
Fig. 12-15: Waveformassociatedwithfig.12-14

SWITCH-MODE POWER SUPPLIES 13.11
2.3 Buck-boost converter
2.3.1 Operation of buck-boost converter
Fig.13-9showsthebasicconfiguration.ClosingScausesacurrenti L toflowandmagneticenergyis stored in the coil ( 1 __ 2 . L . i L 2 ). Whentheswitchopens,themagneticenergycanonlybedischargedintheloadandthisresultsinareversepolarityoftheoutputvoltageV o withrespecttoV i .Thecapacitoronceagainfunctionsasafiltercapacitor. Aswithaboostconverterwefirststoreenergyinthecoilandpump this energy to the load when the switch is open.Thisexplainswhybothconvertersareclassifiedasflyback converters.
vi
is
iL vL RbC
D+
-
L
S
vi
vs
iD
iDvD
iL Rb VoIo
C
D+
-
L
S
+
-vL
Onceagainwedistinguishbetweentwooperatingmodes,namelycontinuousanddiscontinuouscurrent mode in the coil. 2.3.2 Continuous current in the coil
Fig. 13-10a shows the associated waveforms. When the switch closes a voltage results across the
coil: v L = V i =L. ∆i __ ∆t =L.
(I 1 − I 2 ) _______ δ.T or:L.( I 1 − I 2 )=δ.T. V i (13-14).
Whentheswitchopensafterneglectingv D : v L = V o =L ∆i ___ ∆t =L. ( I 2 − I 1 )
_________ (1−δ).T or:
L.( I 2 − I 1 )= V o .(1−δ).T (13-15)
From (13-14) and (13-15) it follows: (13-16)
Fig. 13-9: Basicprincipleofbuck-boostconverter
V o = − V i . δ ____ 1 − δ

13.12 SWITCH-MODE POWER SUPPLIES
2.3.3 Discontinuous current in the coil
Inthiscasetheenergyinthecoiliscompletelydischargedbeforethetransistorswitchrecloses.Once again there is a dead time t d (discontinuouscurrent).Fig.13-10bshowstheassociatedwave-forms.ClosingtheswitchSresultsinavoltageacrossthecoil,whereby V i = v L =L. ∆i __ ∆t =L.
I 1 ___ δ.T or: L . I 1 =δ.T. V i (13-17)
Aftertheswitchopensduringthetimeinterval(1−δ).T− t d almost all the energy in the coil is gone. The voltage across the coil is now V i and the current changes from I 1 tozero,sothat: V i = v L =L.
(0− I 1 ) _______________ [ (1−δ).T− t d ]
→→ L . I 1 =− V o . [ (1−δ).T− t d ] (13-18) From (13-17) and (13-18) it follows that: δ.T. V i =− V o . [ (1−δ).T− t d ] from which: (13-19) 2.3.4 Remarks
1. From(13-16)and(13-19)itfollowsthatthebuck-boostconverterresultsinvoltage inversion. 2. Dependingonthevalueofδwe have | V o |≤or ≥| V i | .Thisisthereforeastep-up/step- down converter. 3. The maximum voltage across the (transistor) switch is V i + V o ascanbeseenin fig.13-10atthebottom. 4. The maximum reverse voltage across the diode is V i + V o . 2.3.5 Numeric example 13-3: Forabuckboostconverterwithcontinuouscurrentmodewearegiven: .inputvoltage:V i =3to15V .max.outputcurrent:I o =3A.outputvoltage:V o =9V± 0.1% .chopperfrequency:f=100kHz Required: determine the values of L and C Solution:
From (13-16) →→ V o = V imax . δ min _________ (1− δ min ) →→ δ min =
V o _________ V imax + V o =
9 ______ 15 + 9 =0.375.
Assumption∆ i Lmax =0.2x I o =0.6A
From (13-15) →→ L max = V o . (1− δ min ).T
____________ ∆ i L =9 . (1 − 0.375) . 10 − 5
__________________ 0.6 =93.75µH
From (13-7) →→ C min = ∆ i L ___________ 8.f.∆ v Cmax
= 0.6 ______________ 8 . 10 5 . 9 . 10 − 3
=83.4µF
and: ESR max = ∆ v omax _______ ∆ i L =0.1% . 9 _______ 0.6 =0.015Ω
V o =− V i . δ _________ 1−δ− t d /T
!

SWITCH-MODE POWER SUPPLIES 13.13
Fig. 13-10: Waveformsoffig.13-9
t
iS
I1I2
t
iLI1I2
t
vL
-Vo
I2
I1
iD
Vi
∆ iL
t
Vi + Vo
vS
t
Vi
T
(a) Continuous current
t
iS
I1
t
iL
I1
t
vL
iDI1
Vi
-Vo
tvS
t
Vi
T
(b) Discontinuous current
td
Vi + Vo
δ.Tδ.T(1 - δ).T
(1 - δ).T

13.32 SWITCH-MODE POWER SUPPLIES
13. NON IDEAL WAVEFORM
Infig.13-26weredrawtheflybackconverter,butnowanumberofparasiticelementsareinclud-ed.Thesehavebeendrawningreen. Where: L cb : parasiticselfinductionoftheprintedcircuitboard; L 0 : magnetizinginductanceofthetransformer; L lk : leakage inductance of transformer; C prim: capacitanceoftheprimarywindings; C sec : capacitanceofthesecondarywindings; C tr : feedbackcapacitancebetweensecondaryandprimarytransformer; C D : diodecapacitance; C o : outputcapacitanceoftransistor. Fig.13-26isanapproximateddrawingsincetheseparasiticelementsdonothaveaconstantvalueandareoftenvoltageandfrequencydependent. Fig.13-27ashowsforexamplethevoltageacrosstheMOSFET.ItisclearthattheoscillationscausethevoltageacrosstheMOSFETtoincrease.AsnubberacrosstheMOSFETcanpreventitbeingdestroyed. Ifwetakealookatthefirsttwoperiodsofoscillation(fig.13-27b),thenweseeinthisexampleaperiodof100ns.Thiscorrespondsto10MHz. Aruleofthumbindicatesthattheoscillationfrequencyisapproximately100timestheswitchingfrequency. Fig.13-27bistheresultofresonancebetweentheleakageinductanceofthetransformerontheonehandandtheselfinductanceofthecurrentloopontheprintedcircuitandontheotherhandtheoutputcapacitanceoftheFETandthetransformercapacitances.ThedistortionofthesinusoidsistheresultofthevoltagedependentoutputcapacitanceoftheMOSFET.
cb
0
lk
0
prim.
sec.
tr. D
C
C
L
L
LC C
C
Fig. 13-26: Flybackconverterwithparasiticelements

SWITCH-MODE POWER SUPPLIES 13.33
0
V
2 4 6 8 10 12t (µs)
t (ns)
DS (V)
140
120
100
80
60
40
20
v (V)
40 80 120 140
80
60
40
20
20
40
60
0
(a) (b)
Fig.13-27a: WaveformontheFETinfig.13.26 Fig.13-27b:Firstperiodoftheoscillationsinfig.13-27a
14. DIGITAL CONTROL OF AN SMPS
Withanewtypeofdigitalsignalcontroller(DSC)thereisnowenoughcalculationpoweronboardtoexecutethesoftwarequicklyenoughtohandleclosedloopcontrol.ThisDSChasin additionbuilt-inintelligentmodulesforPWM,andananaloguetodigitalconverter(ADC).
IN OUT
T
T
1
2
L
C RPWM
PWM
1
2
IN OUTPID PBM
T
T
1
2
S&H
S&HADC
+
DSCFig. 13-29: Digitallycontrolledbuckconverter
Welookattheexampleofthesynchronousbuckconverterfromfig.13-24andapplyavoltagebetweenthepointsAandB.Thisbringsustofig.13-28.Theanaloguecontrolcircuitfromfig.13-24hasnowbeenreplacedwith a digital control system with a DSC (fig.13-29).
Fig. 13-28: Basicconfigurationofasynchronousbuckconverter

13.34 SWITCH-MODE POWER SUPPLIES
Theprocessinginthedigitalcontrolloopresultsindelays.APIDcontrollerthatrunsintheDSChasatypicalcalculationtimeof1µs.ThePIDcontrolitselftakesabout2µs.Theanalogue-digitalconverter(ADC)takessamplesandconvertsinabout500ns.Considerinadditionatransistorswitching time of 100ns, then we arrive at a total delay of 3.6µs. From this we can determine an optimumsamplingrateof277kHz.Inordernottolooseanyinformation,theShannontheoremtellsusthesamplingfrequencyhastobeatleasttwicethehighestfrequencythatFourieranalysisrevealsintheanaloguesignal.Withthis“twice”samplingratethephasedisplacementis180°.Due to the associated delay in the system we exceed the maximum allowed 180° required for a stablesystem.Forthisreasonindigitalcontrolsystemstheanaloguesignalisoversampledwithafactor ten.
15. EVALUATION
13.1 Withwhichisolatedconverteristhesupplyvoltageacrossthetransistorandforwhich converteristhedoublesupplyvoltageacrossthetransistor. 13.2 What does discontinuous current mean for a converter? 13.3 Whichtypesofflybackconverterareyoufamiliarwith? 13.4 Whatisthedifferencebetweenaflybackandaforwardtype? 13.5 Whatdoes“feedforward”controlofanSMPSinvolve? 13.6 WhattypeofoutputdiodeisusedforanSMPSwithahighoutputvoltage? 13.7 Whatisthebigadvantageofferritecoretransformerscomparedtostandardironcore transformers? 13.8 What does off-the-line mean? 13.9 Whyshouldflybackconvertersneverhaveanopenoutput,orbewithoutacontrolloop? 13.10 Uptowhichpowerlevelarelinearpowerregulatorsused?Whatistheefficiencyofsuch a regulator? 13.11 a) What does EMI stands for? b)Whatforthemostpartdeterminestheweightandvolumeofalinearstabilisedpower supply? 13.12 Provethatexpression(13-21)isequivalenttoexpression(13-19).
16. THE DESIGN OF SWITCH-MODE POWER SUPPLIES
ThiscanbefoundonthewebsiteofCASPOC.www.caspoc.com/educationundertheheadingbooks“Pollefliet”.

14.16 INVERTERS
Fig. 14-14: Outputlinevoltageasafunctionofmodulationdepthm(forN=15)
6. PWM STRATEGIES
Upuntil1980thepulsepatternsforPWMwereproducedusinganalogtechniques.Between1980and1990digitaltechnologystartedtobeusedtoproducethePWMwaveformsinthree-phaseinvertersformotorcontrol.Intheearlyyears8bitmicroprocessorswereused.AfterthatDSP’s(digitalsignalprocessors)appearedonthescene.
6.1 Analog technology ( system with modulated output voltage)
Thissystemwithamodulatedoutputvoltagewascommoninearlyanalogtechnology.Areferencevoltagewascomparedwithacarrierwaveofhigherfrequency.Thisiscomparabletothedidacticexampleoffig.14-11.
6.2. Digital technology (system with calculated voltage pattern)
The desired condition of the inverter switches is calculated using a DSP. For the three voltages thereisavaryingsinglestepshapedreference,thiscanforexamplebederivedfroma“look-up”table.This(hypothetical)sinusoidalvariablereferenceiscorrectedduringeverypulsewitha“zerosequence”value.Thiszerosequencevalueisdeterminedperpulsebydividingbytwothesumofthemostpositivevalueandthemostnegativevalueandaddingthiszerosequencevaluetothethreebasicreferences. Inthiswaythezeropausesatthestartandendofeverypulsearesynchronised. 6.3 Value of the output voltage of a PWM inverter
Fig.14-5showstheoutputvoltageofaninverterwithaquasisquarewaveintheoutput.
From(8-28)theamplitudeofsuchawaveformcanbefound:
v 1 = 2 . √
__ 3 . V t _________ π ,
so that the RMS value is: V 1 eff. = √
__ 6 ____ π . V t . Here in : V t ≈ ^
v = √
__ 2 . V net .
v LL 2 Vt1
m0
0,612
0,78
1 3,2
over-modulationsquare wave
linear area

APPLICATIONS OF POWER ELECTRONICS 15.7
. softwarecontrol:viaRS232andalocalnetwork.ViathebuiltinwebservertheUPScanbe remotely monitored and controlled.
1.3 Static UPS without auxiliary network
1.3.1 Passive stand-by topology
Whenthereisnoauxiliarynetworkavailablewhenfaultsoccurthebatterieshavetosupplytheenergy.Thesebatteriesarereferredtoastheback-uporredundantcurrentsource.Forcomputerpowersuppliesextrarequirementsmaybemade. Inthesupplynetworkanumberofdisturbancesmaybepresentduetoatmosphericinfluences(lightning,…)faultsinthesupplynetwork(shortcircuits,…)industrialdisturbance(weldingmachines,motors,lifts,fluorescentlamps,…).Overvoltageandundervoltagecanoccuraswellasmicrointerruptionsorlonginterruptions.Thesevarietyofdisturbancesarenotcompatiblewithgoodoperationof(micro)computers. Thesupplynetworkofacomputershouldbefreefromthefollowing: . frequency and voltage variation. voltagedrop. shortpowerinterruptions. electromagnetic faults.Inadditionthereshouldbesuitableautonomytoenablesavingofdataandthecompletionofcal-culationsintheeventofapowerfailure.Anautonomyofbetween10to15minutesisusuallythemaximum.Ittakesseveralmsfortheautonomytokickin.Fig.15-5showsthebasicschematic. Afilterneutralizesthehighfrequencypeaks.Sometimesanultraisolatorisincluded,Thisisatransformerwithoneormorescreenssothatshortdurationhighfrequencyfaultsmaybefiltered.
Fig. 15-5: UPSofthepassivestand-bytype
Innormalservicetheconsumerissuppliedviaafilterandultra-isolator.Whenavoltagedistur-bancebecomestooextremetheUPSswitchestoaninverteroutput.Thisinverteroutputisincontinuousservicetogetherwiththerectifierandbattery. ThepositionsoftheswitchareindicatedwithS.B.(stand-by)andO.L.(online). Under2kWUPSareusedalmostexclusivelytosupplycomputers.
RECTIFIER INVERTER
24V+
-
230V
GRID
FILTERULTRA-ISOLATORSWITCH OVER
CONSUMER
O.L.
S.B.

APPLICATIONS OF POWER ELECTRONICS 15.21
Asalightsource,LEDshaveanumberofinterestingproperties: 1. Incontrasttootherlightsources,LEDsdonotsuddenlyfailorburnout.Theluminous intensity of LEDs reduces gradually. They still emit 70% of their initial luminous intensity after50,000hours(onfor12hoursperdayfor11years!).ThelifetimeofLEDsisbetween 50,000and100,000hours.Bycontrast,anincandescentlamphasalifetimeofabout3000 hoursandaCFL(compactfluorescentlamp)lastsforupto10,000hours.Thereistherefore nonecessitytoreplaceaLEDlamp,whichisimportantforcriticalapplicationssuchas beacons,buoys,lighthouses,emergencyexits,etc. 2. Highefficiency.WithcurrenttechnologywehaveUHB-LEDs(ultrahighbrightnessLED) whichhave10timesthelumen/wattratioofahalogenlamp.ALEDheadlightof50Wina caristhereforeequivalenttoa500Whalogenlamp.AUHB-LEDcurrentlyprovidesupto 100lm/W(whitelight),andprototypesexistwhichprovide200lm/W.TheoriginalLED- indicator in the early 70s delivered 0.1 lm/W. 3. LEDs emit little heat. 4. Theyareflatelementswithsmalldimensions. 5. Canwithstandshocksandvibrations,whichisimportantincars. 6. Theyaresemiconductors,whichmeansthereisnogas,mercuryorfilamentpresent.The LED therefore has an environmental advantage. 7. OftenmultipleLEDsareconnectedinseries,withaconstantcurrent.IfoneLEDgets short-circuitedtherestcontinuetooperatesincetheyaresuppliedwithaconstantcurrentsource. 8. ByusingacontrolIC,itispossibletocontroltheluminousintensityusingPWM. Inpractice,itispossibletocontrolfrom0tothefullluminousintensity.UsingPWMitis possibletocontroltheluminousintensity,whilemaintainingfullcolourintegrity. 9. Operationisatlowvoltagelevelsandhighvoltageconnectionsarethereforeavoided. ALEDrequiresabout3V(between2.5and4.47Vdependingonthetype)sothataseries connectionoftensofLEDscaneasilybecontrolledfromanICthatissuppliedwithan inputvoltageof40to50V.TheLT3595(LinearTechnology)isa16channelLED-driver capableofhandling160LEDsfromaDCsourceof45V.ThisICcanhaveadutycycle (dimming) of 5000:1.
Remarks 1. AnotherinterestingapplicationofLEDsisthatanRGB-colouredlightsourcecanbebuilt. ToachievethisoftentwogreenLEDswithoneblueandoneredLEDareused.Thiscom- binationtakesthesensitivityofthehumaneyetocolourintoaccount.ALEDhasanomi- nalwavelengthandcolourwithaspecificcurrent.That’swhyweuseacurrentsourcewith theLEDs.UsingcolourmixingLEDscancreateacontinuouscolourspectrum.Toachieve this,theluminousintensityofeachLEDiscontrolled.Thisisnotachievedbylinearly controlling the current of each LED since this would change the colour. The solution is PWM of the current. FourchannelLED-driversexistinICformtorealizethisRGB-luminousflux(forexample theSTP04CM596fromthefirmST,seewww.st.comunder“lighting”).
!

15.22 APPLICATIONS OF POWER ELECTRONICS
2. AnotherexampleoflightingcontrolusingLEDsistheapplicationofthecontrolIC IRS2540fromInternationalRectifier.ThisICcanoperatewithasupplyof200V.APWM- controlsignalusesburstmodecontrolat175kHz.ThedutycycleofthePWMcontrolis100%. 3. AnimportantnicheforLEDsisthecarindustry.Europeancarswerethefirsttouseblue/ green/white/ambercolouredLEDsintheinstrumentpanel.AmericanandJapaneseluxury carbrandsfollowedthistrend.AbrandsuchasLexususes50WUHB-LEDSforthehead- lights.LEDshavestartedtoreplacehalogenandXenonlamps.Advantagesincludethe streamlineddesignsandthelongerlifetimeofthelamp.LEDtechnologyisnolongerjust usedintheluxurycarmarketbutisalsousedinthemiddleclasssegment.Applications vary from head lights to interior lighting. The LT3755 from Linear Technology is a control-ICintendedfor50Wheadlights.ThisICcanboostthe12Vbatteryvoltageto60V to control a series circuit of 14 LEDS drawing 1A. 4. AnotherimportantterrainforLEDSis“backlighting”ofHDTVLCDscreens.Forback- lightinga46”LCDTVrequiresabouttenLT3595’sperHDTV. 5. IC-manufacturersproducefamiliesofLED-driversthatcomplywithspecificrequirements forspecificapplications.InfineonforexamplehasalowcostLED-driver(BCR450)for controlofhighpowerLEDs.IncombinationwithanexternaltransistorthisBCR450is capableofprecisecontrolofthecurrent.Inadditionthereisovercurrentandovervoltage protection,etc. 6. ALEDcannotbedimmedusingatriacdimmer.NationalhasdevelopedanIC(LM3445) thatmakesitpossibletodimaLEDincombinationwithatriacdimmer.(www.national. com/powerwise) 7. MoreandmorepublicauthoritiesareconsideringinstallingLEDstreetlighting.Astreet- lightisroutinelyrequiredtodeliver10,000lumens.CurrentLEDstreetlightsusebetween 50 and 200 LEDs with a current of 350mA. A solution for street lighting is to connect a numberofseriesLEDcircuitsinparallel.AccordingtoIECspecificationsatransformer needstobeplacedbetweentheLEDsandthesupplynetandthesecondaryvoltagemay notbegreaterthan120V.Often48Visused.Inthismanner12InGaN-LEDscanbecon- nectedinseries(12x3.3V=39.6V).Abuckconverterisrecommendedforthesupply. Itisthecheapest,simplestandmostefficientoftheclassicconverters.Ifaconverteris usedforeveryseriescircuitofLEDsthentheycanbedimmedindependently.Adisadvan- tageofthissetupthoughisthecostprice.Whenthebuckconvertersareconnectedin parallelthenEMCproblemsresult.Tocombatthis,filterscontainingatleastacoilanda capacitorarerequiredintheinputofeachconverter.Thisincreasesthecostpriceeven further.Topreservethequalityofthesupply,networkpowerfactorcorrectionisalso implemented.StreetlightingisusuallyclassifiedasHPWA(highpowerwidearealight- ing).Inadditiontoenergyefficientsolutionsforinteriorlighting,streetsandtouristattrac- tionsattheWorldExpo2010inShanghai,OSRAMtogetherwithitsmothercompany Siemens,installed150,000LEDsinthepavilionsandstreetsaroundtheExpo.

APPLICATIONS OF POWER ELECTRONICS 15.23
12
7
9
54
3
6 8
5. RENEWABLE ENERGY
A. WIND TURBINES 5.1 History CharlesBrush(1849-1929)wasoneofthepioneersoftheAmericanelectricalindustry.Inthewinterof1887-1888Brushbuiltthefirstautomaticwindturbinetoproduceelectricity.Arotorof17mdiameterwith144rotorbladesmadeofcedarwooddroveaDCgeneratorof12kW.Theturbineworkedfor20years. PoulLaCour(1846-1908)wasthepioneerofmodernaerodynamicsandbuilthisownwindtun-neltouseforexperiments.In1897LaCourhadexperimentalwindturbinesintheAskovFolkHighschool(Denmark).In1918therewereabout120localwindturbinesofbetween20and35kWinDenmark.AllthegeneratorswereDCmachines.In1951aDCgeneratorwasreplacedwitha35kWasynchronousmachine.In1980-81a55kWgeneratorwasdevelopedthatultimate-lywasresponsibleforthebreakthroughofthemodernindustrialwindturbine. Inspecialcaseswindturbinesupto6MWarepossible.Ontheotherextremeofthepowerrangethereisalsoamarketforsmallwindturbines(100kW)forprivateuseonfarmsetc. Themajorityofthewindturbineshaveapowercapabilitybetween500kWand1MW. The6MWturbinefromREpowerinstalledin2009ontheGermanDanishborderhasarotor- diameterof126m,rotorbladeswithalengthof61.5mandahubheightof100m. Currently1%ofalltheworldselectricityisproducedfromwindenergy,16%fromnuclearenergy and 16% from hydro-electricity. 5.2 Construction of a wind turbine
Fig. 15-22: Crosssectionofa2MWwindturbine.CourtesyofVestasWindTechnologyA/S
Thepartsare: 1:rotor 4:alternator 7:measurementofwindspeedanddirection 2: main shaft 5: radiator 8: tower 3:gearbox 6:mechanicalbrake 9:gondola

16.6 ELECTRIC MACHINES
1.4 Impedance transformation
1.4.1 Transformation formula Fig.16-7ashowsanidealtransformer,loadedwithaseriesR-L-C circuit. An ideal transformer is a transformer without losses.
Fig.16-7:Ideal transformer, loaded with a series R-L-Ccircuit:impedancetransformation
Secondary: v s = R s . i s + L s . dis __ dt + 1 __ C s
∫ 0
t
i p.dt Applicationof(16-8)gives: v p=k
2 . R s . i p+k2 . L s .
dip ___ dt +k
2 . 1 ___ C s ∫
0
t
i p.dt Foranidealtransformer,thesecondaryloadcanberepresentedasanequivalentcircuitseenfromtheprimaryside(fig.16-7b),aslongas:R’=k2 . R s;L’=k
2 . L s ; C’ = C S/k2 .
Moregenerally:anidealtransformerwithsecondaryimpedanceZ sec . maybeseenasa primaryimpedance: (16-11) From(16-11)itfollowsthatwecantransformaprimaryimpedancetoanequivalentsecondary impedance: (16-12)
1.4.2 Numeric example 16-1:
1. Anelectricalovenissuppliedwith46voltandhasapowerof4kW.Thesupplynetworkis 230V-50Hz.Ifwehadanidealtransformeravailable,whatisthen: a) the transformation ratio b)theprimaryandsecondarycurrent c)impedanceseenfromthe230V-50Hznet?
Z’ prim. = ( N p
______ N s ) 2 . Z sec. (Ω)
Z’ sec. = ( N s _______
N p ) 2 . Z prim. (Ω)
Vp
IpIp
Vp Vs
Is
NP NS
RS R’ = k2 . RS
L’ = k2 . LS
C’ = CS / k2
LS
CS
(a) (b)

ELECTRIC MACHINES 16.7 Solution:
a) k= N P
___ N S = 230 ___ 46 =5
b) secondarycurrent:I S = P S
___ V S = 4000 ____ 46 =86.95A
primarycurrent:I P = I S
__ k = 86.95 _____ 5 =17.39A
c) load impedance:Z S = V S
__ I S = 46 _____ 86.95 =0.529+j.0Ω
Transformedimpedanceseenfromthesource:Z prim.=k2 . Z sec. = 52x0.529=13.23Ω
Proof: Z prim.xIP = 13.23x17.39=230V!! 2. Ifmaximumpowertransferisrequiredfromthegeneratortotheconsumer,thentheconsumers impedanceshouldbethecomplexconjugatevalueofthegeneratorimpedance. Wehaveapoweramplifierwithanoutputresistanceof48Ωandwishtoconnectaloudspeaker withthefollowingcharacteristics:30W-4Ω. Maximumpowertransferispossiblebyplacinganimpedancetransformerbetweenamplifier
andloudspeaker.Theturnsratioshouldbek= N P
___ N S = √_____
Z prim.
____ Z sec. = √
___
48 ___ 4 = 3.46.
1.5 Magnetizing inductance
Withamagnetisingcurrent I µ themagneticfieldstrengthinthecoreisH = N P . I µ
_____ l k and the
magnetic induction is B = µ 0 . µ r . H sothatthefluxinthecoreofthetransformeris: Φ 0 = B . A k =
µ 0 . µ r . A k ________ l k . N p . I µ
Whereby: . Φ0 (Wb): no-loadflux≈resultingflux(Φ 1 − Φ 2)with load . B(Wb/m²): magneticinductioninthecore . µ r : relativepermeabilityofcorematerial . µ 0 : = 4 . π . 10 −7H/m . l k (m): averagelengthoffieldlineinthecore . A k (m²): cross-sectionalareaofcore . I µ (A): magnetising current of the transformer. If we call L 0 theselfinductanceoftheprimarywithrespecttothefluxΦ 0 in the core, then we may
write: N p.Φ0 = L 0 . I µ so that: N p.Φ0 = µ r . µ 0 . A k ________ l k
. N p 2 . I µ = L 0 . I µ
from which follows: (H) (16-13) L 0 = N p
2 . µ r . µ 0 . A k ________ l k

16.8 ELECTRIC MACHINES
Numeric example 16-2:
1.Aringcoretransformer(fig.16-8)consistsof:
Core: averageradius60mm;cross-sectionoftorus45mm; µ r =1600.
Insulation layer: 1 mm thick
Primary: 3layers:respectively201,189and140windingsAWG18.
Eachlayerisseparatedby1mmthickinsulation.
Insulation layer: 4 mm thick
Secondary: twolayers:50and22windingsAWG10,separatedby1mmofinsulation
2. Extractfromwindingwiretable(AWG=Americanwiregauge)
Fig. 16-8:Ringcoretransformer(a)cross-section(b)coreandwindings
Question:
1. Resistanceofprimaryandsecondarycoil
2. Magnetising inductance
Solution:
1.1 Primary resistance
LAYER1: lengthofonewinding:πx0.04811=0.15114m
totallength: 201x0.15114=30.38m
AWGdiameter (with insulation) in mm
min. max.
resistance (per 100 m)
Ω
admitted current(on base of 2A/mm²)
A
10 2.64 2.69 0.3276 10.38
18 1.08 1.11 2.095 1.624
seco
ndar
y
60 mmprimary
ø 45 mm
ø 45 mm
core
insulation
1mm1,11
1,11
1,111
1mm
4mm1
2,69
2,69
(a) (b)

ELECTRIC MACHINES 16.9 LAYER2: lengthofonewinding: πx0.05233=0.1644m totallength: 189x0.1644=31.07m LAYER3: lengthofonewinding: πx0.05655=0.1776m totallength: 140x0.1776=24.87m Totallengthprimarywinding:86.32m Resistance: R p = 86.32 _____ 100 x2.095=1.8Ω 1.2 Secondary resistance LAYER1: lengthofonewinding: πx0.06835=0.2147m totallength: 50x0.2147=10.73m LAYER2: lengthofonewinding: πx0.07537=0.238m totallength: 22x0.238=5.234m Totallengthofsecondarywinding:15.96m
Resistance: R s = 15.96 _____ 100 x0.3276=0.0523Ω 2.Magnetizinginductance
L 0 = N p 2 .
µ 0 . µ r . A k ________ l k = 5302 . 4xπx10
−7x1600xπx0.02252 __________________________ 2xπx0.06 = 2.38 H
1.6 Leakage inductance
Fromtheviewpointofvoltagelossleakageinductanceisundesirable.Transformersarethereforeconstructedtominimisetheleakagefluxes.Fig.16-9shows,forexample,howacoaxialimple-mentationofprimaryandsecondarycoilsminimisestheleakagereactancebyminimisingthedistancebetweenconsecutivecoils.Ontheotherhand,possibleshortcircuitcurrentsarelimitedbytheleakagereactance,whichcanformaprotectionforthetransformer.Inpracticedistribu-tiontransformersareconstructedwithsufficientleakagereactance,sothatshort-circuitcurrentislimited to 8 or 10 times the full load current. Inelectronicpowersuppliesringcoretransformersarefrequentlyused.Duetotheconstructionmethodtheyhaveaminimumleakagereactance.Electronictechnicianstalkabout“hard”trans-formerssincelargevariationsintheloadcoupledwithlowleakageinductancecanproducelargecurrentspikes.Thesevaryingloadconditionsoccurforexampleduringcommutationofone rectifierelementtoanotheronthesecondarysideofthree-phasetransformers.

16.10 ELECTRIC MACHINES
Fig. 16-9:Leakagefluxesbyacoaxiallywoundtransformer
Todeterminetheleakageinductance,weconsidertheprimaryleakageflux(thesamereasoningisvalidforthesecondaryside).Wecannotmakeanaccuratecalculationsincethecross-sectionalareathroughwhichthefluxflowscannotbeaccuratelydetermined.Itispossibletomakeanapproximatecalculation.Ifthecross-sectionalareawhereintheleakagefluxflowsisA lp and the averagelengthofthefieldlineisl lp thensimilartoexpression(16-13),itmaybewrittenas: (16-14) Thefieldlinesoftheleakagefluxcompletetheircircuitthroughtheair(µ r = 1) instead of through the ferromagnetic core ( µ r ),whichexplainsthedifferencewithexpression(16-13).
Numeric example 16-3: Wereusethedataofnumericexample16-2ensurethepossiblepartsoftheleakagefluxesinfig.16-10aandfig.16-10b.
llp
lls
Alp
Als
ls
0
0
0
lp lp ls
primary
secondary
core
Ø
Ø ØØØ
Ø
Ø
lp
ls lp
ls
Als
Alp
23,5
23,5
22,5
22,5
CORE
ø 45primary
28,83
32,83
50 x
2,6
9
ø 4 mm
Ø
Ø
Ø Ø
L lp = sP = N P 2 . µ 0 . A lp
___ l lp
Fig. 16-10a:Primaryleakagefluxoftransformerinfig.16-8a Fig.16-10b:Secondaryleakagefluxfig.16-8b

ELECTRIC MACHINES 16.11
Primary leakage inductance
sp = N p 2 .
µ 0 . A lp ______ l lp
=5302 . 4.π.10−7 . π.(23.52−22.52 ) . 10 −6
_____________________________ 201 x 1.11 x 10 −3
= 228 µH
Secondary leakage inductance
ss = N s 2
. µ 0 . A ls _______ l ls =722 .
4.π.10−7.π.(32.832−28.832 ) . 10 −6 _______________________________
50x2.69x10−3 =37.42µH
If we realise that the magnetising inductance for this transformer is 2.38 H then we see that the leakage inductance is indeed minimal. Itisclearthatthepathoftheleakagefluxesdependsuponthepracticalimplementationofthetransformerwindings.Thepresentnumericexamplegivesusaroughideaoftherelativemagni-tude of the leakage inductance.
1.7 Energy losses 1.7.1. Copper lossesIntheprimaryandsecondarywindingsenergylossesoccur.If R P and R S aretherespectiveresis-tancesofthewindingsthenthelossesmaybewrittenas R P . I P 2 and R S . I S
2 .Thesumofbothisthetotalenergyloss.Thisisreferredtoasthecopperlossesofthetransformer.
1.7.2 Iron lossesInferromagneticmaterials,subjectedtoavaryingmagneticfield,hysteresislossesoccur:
W/kg (16-15)
whereby: kh = material constant of the ferromagnetic material used in relation to hysteresis losses. f = frequency(Hz) ^
B = amplitudeofthemagneticinduction(T=Wb/m²)
n = empiricalconstantforthemagneticmaterial(1<n<3).Sincethemagneticcircuitofatransformerisconstructedfrommetalplates,hysteresislosses occur.Tolimittheselosses,itisdesirablethatthematerialconstantbeassmallaspossible. Apossibilityinthiscaseisanironalloyusingsilicon(e.g.3%silicon).Ifthecorewasmadefromsolidiron,thenconsiderableeddycurrentswouldoccur.Thesecanbedramaticallylimitedbymakingthemagneticcircuitfromplateswhichareinsulatedfromeachotherandthesurfaceofwhich is in thedirectionoftheflux.Asresultofthisthepathoftheeddycurrentsislimited.The eddy current losses P w canbedeterminedwithaformulainthefollowingform: W/kg (16-16)
Here in : kw = materialconstantwithrespecttotheeddycurrentlosses δ = platethicknessinmm.By adding silicon the electrical resistance is also increased as a result of which the eddy current lossesarereduced.Accordingtothelastformula,itisadvantageoustohavetheplatesasthinaspossible.Typicalplatethicknessliesbetween0.3and1mmfor50Hzoperation.Theplatescanbe0.02mmforhighfrequencies.Forbandwoundcoresthicknessesof0.003to0.3mmarepossible.
P h=kh . f . ^
B n
P w =kw.δ2 . f 2 . ^
B 2

16.42 ELECTRIC MACHINES
Numeric example 16-8:
Wereconsiderastatorwith12slots(fig.16-49).ThecoilsN1 to N 6 are in series and form one phase.Assumethatonesuchcompletephasewindinghas1200windings.Wewishtodistributethesewindingsassinusoidalaspossible.Determinethenumberofwindingsforthesesixcoils, aswellasthemmfintheairgapifthecurrentis1A.
Fig.16-49: StatorironwoundwithonephasecoilS1 ( = U 1 U 2 )
Solution:Inastatorwithmslotsweareabletodeterminethenumberofwindingsinslotnbytakingtheidealsinusoidaldistributionoveranangle2.π ___ m around slot n: N k = ∫
2π(n−1)/m
2πn/m
n S1 .dα = N S
___ 2 ∫ 2π(n−1)/m
2πn/m
sin α.dα with n = 1 , 2 , ..., 6 (16-43) Withm=12andNS=1200wefind: N 3 = N 6 = 1200 _____ 2 ∫
0
π/6
sin α.dα = 80 ; N 2 = N 5 = 1200 _____ 2 ∫ π/6
π/3
sin α.dα = 220 ; N 1 = N 4 = 1200 _____ 2 ∫
π/3
π/2
sin α.dα = 300 Withi S1 =1AwefindasaresultofN1 and N 4ineachairgapanmmfof300Awacrossawidthof5.π/6.ThecoilsN2 and N 5produceafieldof220Awacrossπ/2radians.N6 and N 3arerespon-sibleforanextra800Awacrossπ/6radians.Thishasbeendrawninfig.16-50.
N6
N4
N5
N1
N2
N3α

ELECTRIC MACHINES 16.43
Fig.16-50:Magnetomotiveforceintheairgapoftheconfigurationoffig.16-49
ApplicationoftheFourierseriesshowsthatonlyoddcosinetermscanexist. WecalculatetheseFouriercomponents: F S1,α = 4 __ π ∫
0
π/2
F . coskα.dα with k=1,3,5,... Thefundamentalharmonic(k=1)hasanamplitude: F 1 (S1) = 4 __ π . [ 300.sinα| 0
5.π/12
+220.sinα| 0 π/4
+80.sinα| 0 π/12
]=593.39Aw Theamplitudeofthethirdharmonic(k=3)isgivenby: F 3 (S1) = 4 ____ 3 . π . [ 300.sinα| o
15.π/12
+220.sinα| o
3.π/4
+80.sinα| o π/4
] = 0 Aw Fifth,seventhandninthharmonicsprovetobezero. F 11 (S1) = 4 _____ 11 . π . [ 300.sinα| 0
55.π/12
+220.sinα| 0
11.π/4
+80.sinα| 0
11.π/12
]=53.94Aw F 13 (S1) =35.84Aw The eleventh harmonic is 1 __ 11 ≈9%ofthefundamental. Accordingtofig.16-50themaximummmfis600Aw.Theamplitudeofthefundamental accordingtoourcalculationis593.39Aw.
Usuallywedefineanequivalentsinusoidalwindingas: N Se = 1200 . 593.39 ______ 600 =1184.78Aw
100200
400500
600
02 2 2
3 α
F

ELECTRIC MACHINES 16.45
F µ,α =
N Se .
i µ _______ 2 . [ 3 __ 2 . cos( ω S . t + φ µ − α)]
(16-44) Expression16-44indicatesthatthemagnetomotiveforceissinusoidallydistributedinspaceandrotates with an angular velocity of ω S .TheamplitudeisdeterminedbyNSe .
i µ .
Themaximumofthemagneticfieldateachinstantoccursatanangleα,givenby: α=ωS.t+φµ (fig.16-52).
Fig.16-52:Spacevectorofthemmfintheairgapofanasynchronousmotor
The angle φµ isthedisplacementanglebetweentheappliedphasevoltagev S1 =
v S.cosωS .t and themagnetizingcurrenti µ .WiththechoiceofphaseorderU-V-Wweobtainacounterclockwiserotatingstatorfield.Iftheconnectiontoanytwowindingsarereversed(e.g.U-W-V)thenthestatorfieldrotatesclockwise. 3.1.4 Magnetising inductance Theinductionintheairgapiscalculatedwith:
→
B ag =
µ 0 . →
F µ,α _________ l ag
From (16-44) we can calculate the effective value of F µ,α so that we can write for B ag : (Tesla) (16-45) Weconsiderfig.16-51. Wearelookingfortheinstantatwhich i S1 =
i µ . cos ( ωS.t+φµ ), this occurs at ωS . t = −φµ .
At that instant the magnetic induction (vector) is directed according to the reference shaft of the stator (this is coil U 1 U 2 ). The value of the mmf follows from (16-44): F µ,α =
3 . N Se . ^
i µ __________ 4 . cos α so that: B ag,α =
µ 0 . F µ,α ________ l ag
= 3 . N Se . µ 0
__________ 4. l ag .
i µ .cosα= ^
B ag .cosα
Themagneticinductionissinusoidallydistributedinspacejustlikethewinding.
F µ,α = 3 . N Se .
i µ _________ 4 . cos( ωS.t+φµ−α )
→
B ag = 3 . N Se . µ 0
________ 4.lag .
→
I µ
(t = 0)
Fµ,α
Iµ
φµ
ωs
α
reference axis stator

16.46 ELECTRIC MACHINES
WewillnowdeterminethefluxinthecoilS1andthatleadsustothemagnetizinginductance.AssumeinthefirstcaseawindingofcoilU1 - U 2atanangleα(andα+π) to the stator. For a stator with internal radius r and axial length lthefluxofonewindingis:
Φ winding = 2 . ^
B ag . l . r . sinα TofindthemaximumofallthelinkedfluxofawindingU1 - U 2 we have to integrate Φwinding across thewindingdistribution: ^
Φ S1 = ∫ −π/2
+π/2
n S1 . Φ winding .dα Applying(16-39):^
Φ S1 = ∫
−π/2
+π/2
N Se
___ 2 . sin α.( 2 . ^
B ag . l . r . sin α).dα (Wb) (16-46) Ifwereplace(16-45)inexpression(16-46),thenwefindtheeffectivevalueofthestatorflux,generated in one coil ( S 1 ): (16-47) Thelinkedflux
→
Φ S1 isproportionaltothemagnetizingcurrent.Fluxandcurrentareinphase.We
refer to →
Φ S1 ____
→
I µ = L 0 asthemagnetizinginductance:
(16-48) Fig.16-53showsthemagnetizinginductance.Theinducedemfinonephasewindingisgivenby: (16-49)
Fig.16-53:Magnetising curve of an asynchronous machine
^
ΦS1 = π __ 2 . N Se . ^
B ag . l . r
→
ΦS1 = 3.π ____ 8 . N Se 2 .
µ 0 . l . r ______ l ag
. →
I µ
L 0 = 3.π ____ 8 . N Se 2 .
µ 0 . l . r ______ l ag
→
E S1=j.ωS . →
ΦS1=j.ωS . L 0 . →
I µ
0
tg β = L0β
Øs1
Iµ

ELECTRIC MACHINES 16.47
Numeric example 16-9:
Atwopolethree-phasemachinehasarotorwithalengthof100mm.Theradiusoftherotoris50mmwhiletheairgaphasaneffectivelengthof0.6mm.Theeffectivenumberofsinusoidallydistributedwindingsis160.Themotorisconnectedinstartoa400V-50Hzpowergrid.
Question:
1. Thenominalinductionintheairgap2. The magnetising inductance and the magnetising current.
Solution:If we neglect the resistance R S of the stator coil, then: E S1 = V S1 = 400 ___
√__
3 = 230V
(16-49): Φ S1 = V S1
___ ωS = 230 _______ 2 . π.50 =0.732Wb
(16-46): ^
B l = 2 . √
__ 2 . Φ S1 _________ π. N Se . l . r = 2 . √
__ 2 .0.732 _________________ πx160x0.1x0.05 = 0.824Tesla
A value of 0.8 to 1 T is normal. The maximum inductance in the stator teeth is usually 1.6 to 1.8T. If the stator teeth are as wide as the slots, then the average inductance is 0.8 to 0.9T. Magnetising inductance (16-48): L 0 = 3.π ____ 8 . 160 2 . 4xπx 10 −7 x0.1x0.05 ____________________ 0.0006 =315mH
Magnetising current (16-49): I µ = V S1 _____ ωS . L 0 = 230 _________________ 2 . π.50.315. 10 −3 = 2.324A
Photo Siemens: Cross section of a 1LE1 asynchronous motor
1LE1 Standard induction motor 0.55to200kW 9.9to1546Nm 50/60Hz 2-4-6poles USA(also8poles) Generalpurposeinaluminiumand "Severe Duty" in cast iron for more demanding industry. Rotorincastcopperforhigherefficiency(IE1toIE3) Modulardesign:anumberofoptionsareeaslytoadd(seep.20.15).

18.8 CURRENT - , ANGULAR POSITION - , SPEED TRANSDUCERS
1.6.2 Closed loop sensor
Infacttheconstructionofaclosedloopsensorwithflux-gateiscomparablewiththemagneticcir-cuitinfig.18-4inwhichaHallsensorisnowreplacedbyaflux-gatesensor.Thisisshowninfig.18-9.ThecurrenttobemeasuredI 1 producesafluxΦ 1 and a current I 2 is sent through the second-arycoil(fluxΦ 2 ) in such a way that Φ 2=−Φ 1 . Here N 1 . I 1 = N 2 . I 2 . It follows that: I 1 =
N 2 __ N 1 . I 2 .
Wearecontinuallytryingtobringtheflux-gateoutofsaturationtothepointofsymmetryofthehysteresisloopsothattheresultingflux(Φ 1 + Φ 2 )iszero.Aswasthecasewiththezerofluxtransducer(fig.18-4),thevoltagedropofI 2 overaresistorproducestheoutputvoltageofthecurrentsensor.Sincethisisafloatingoutputitissometimesfedintoadifferentialamplifierwithopamps. ThesignalgeneratorwhichsuppliesthewindingN f iscomprisedofacomparatorcircuitwithhysteresis (Schmitt-trigger). The current change in I f producesnoiseintheprimaryofthecurrentsensorasaresultofthetransformeroperation.Afilterisrequiredtoremovethenoise.
Fig. 18-9: Adjustingtheclosedloop
ThefirmLEMsuppliesthemarketwiththefollowingflux-gatesensorsCAS/CASR,CFSRandCTSR(seephoto’sonp.20.13andp.20.82).Thephotoatthetopofp.18-9showsadidacticmodelofaflux-gatecurrentsensor.
I1
N1
N2 I2
flux-gate
Φ
Φ
ΦΦ1+
2
2 = 0
1
YES
NO
I2
NN
11 22 II = .
Nf
adjust

CURRENT - , ANGULAR POSITION - , SPEED TRANSDUCERS 18.11
1.6.3 Current measurement in a photovoltaic installation
Asdiscussedinchapter5and15wewantaPV-installationtooperateattheMPP(maximumpowerpoint).ThismeansforeveryPVtopologyweneedtomeasuretheDC-output(currentandvoltage)ofthesolarpanel.Inadditionacurrentmeasurementintheinputofthecontrolloopisnecessaryforprotectionagainstshortcircuitandovercurrent.IninstallationswithouttransformerthemaximumDC-currentthatthePVinstallationcansendintothepowergridisamaximumof10mA to 1A. Thevaluedependsonthestandardusedinthedifferentcountries.(IEC61727,…VDE0126-1).From all these requirements current sensors used need to have: an accuracy better than 1%, low offset, low drift in amplification, operate well with DC and low frequencies. Asensorwithclosedloopflux-gatetechnologymeetsthespecifiedrequirements.ThefirmLEMhasdevelopedtheirCTSR-seriesforthistypeofapplication. Inadditiontothementionedrequirements(accuracy,lowdrift,…)theCTSR-serieshasanumberofadditionalfunctionssuchas:referencepin(forselftesting),demagnetizingfunction(alsoviathereferencepin).TheCTSRcanbeusedforsingleandthree-phasevoltages.TheCTSRalsohasaversionwithfourindividualprimaryconductors.Threeconductorsareusedforthree-phasesystemsandthefourthconductorisusedfortestingtheoperationorasneutralconductorofthethree-phasenet. InadditionthemagneticcoreoftheCTSRhastwomagneticscreenstoprotecttheflux-gate fromexternalmagneticfields.Thereferencepinprovidesaccesstothe2.5Vreferencevoltage.This V ref. canbeusedasareferenceforanAD-converter.
Fig.18-10(photoLEM):Exampleofaleakagecurrent
Fig.18-10showsanexampleofhowaleakagecurrentcanflowinaPV-installationwithouttrans-former.Thecapacitancebetweensolarpanelandtheroofcanbethecauseoftheleakagecurrentwhichcanresultinthesolarpanelrisingtothenetpotential.Itisthereforenecessarythatany leakage currents are measured contact free and in a galvanically isolated manner.

CURRENT - , ANGULAR POSITION - , SPEED TRANSDUCERS 18.17
ThephotobelowfromthefirmHeidenhainshowsonceagainthetransparentprincipleofan opticalencoder.
Photo Heidenhain: Principleconfigurationopticalencoder
ThelightbeamemittedbyL(e.g.aLED)isconcentratedbyalensKandthereaftersplitbyade-tectionplateintofivefields.IfaglassrulerMwithanincrementalscaleC(e.g.20µm)comprisedofchromestrips(C/2wide)moveswithrespecttothedetectionplateAthelightwhichshinesthroughissinusoidallymodulated(duetothespecialconstructionofthedetectionplate).Fourofthefivefieldsproduceviaphoto-transistorssinusoidalsignalsdisplacedby90°withrespecttoeachother.Sincethefoursinusoidsarenotsymmetricalwithrespecttothezerolinetworesult-ingsymmetricalsinusoidsS1andS2areproducedviaapushpullcircuitwhichare90°outofphasewitheachother.ThisistheSIN/COSoutput.Atypicalamplitudeis1Vpeaktopeak.Thesinusoidscanalsobeconvertedinternallytoblockwaves(asinfig.18-15)whichthenappearontheoutputatTTLorHTLlevel.ThefifthfieldservesasareferenceR(oneperrevolutionoftheshaft).Encodersmaybesingleturnandmultiturntypes.Singleturnsystemsprovidetheactualpositionwithinonerevolution.Multi-turnpulsesensorsoperatewithmultiplerevolutions.

19.12 SPEED- AND (OR) TORQUE-CONTROL OF A DC-MOTOR
3. CONTROLLED SINGLE QUADRANT DRIVE
3.1 Operation
Agoodspeedcontrollermustmeettworequirements: 1. nshouldbeindependentoftheload2. I a shouldbelimitedtoanadjustablemaximum.Theblockdiagramofthecontrolcircuitforthespeedcontrolwitharmaturecontrolisshowninfig.19-11.
Fig. 19-11: Block diagram of a controlled single quadrant drive
Withapotmeterthedesiredspeedisset.Atachometerproducesavoltageproportionalwiththeactualspeedofthemotor.Set-pointandprocessvalueintheformofvoltagesarecomparedwitheachotherinacomparator.Attheoutputofthiscomparatorthedifferenceεappears.If ε≠ 0 thespeedofthemotorisnotequaltotheset-point,inotherwordsthereisanerror.The fault ε is referred to as the error signal. The error εistransferredtothefirstcontroller.Ifthiscontrollerisaproportionalamplifier,thentheoutputsignalwillbeproportionaltothedifferencebetweenset-pointandtheactualspeedofthemotor.Inotherwordstheoutputofthespeed controllerindicatesifthemotorshouldaccelerateordecelerate.Forapositiveε the motor should accelerate and for a negative ε the motor should decelerate. An acceleration or deceleration correspondswithanincreasedordecreasedmotortorque.Thisisachievedbyanincreasedordecreased current in the motor.
Ia referenceIa actual
nactual
speed reference
(set value)speed regulator
+
-
+
-
current regulator
control unit
PI (D) PI (D)
tachon M+
-
Im
controlledrectifier
GRID3
Φ
ε
currentlimiting circuit

SPEED- AND (OR) TORQUE-CONTROL OF A DC-MOTOR 19.13Theoutputofthespeedregulatoristhereforeameasureofthedesiredarmaturecurrentofthemo-tor.Wecomparethisdesiredarmaturecurrentwiththeactualarmaturecurrentinacurrentcom-parator. Theoutputofthiscomparatorisnowtheinputforasecondcontrollertoachieveanasexactaspossiblecurrentcontrol.Theoutputofthissecondcontrollersendsapulse(controlsignal),whichforitspartcontrolsthethyristorbridge.Theoutputvoltageofthebridgeiscontrolledasafunctionoftheinputvoltageofthepulsegenerator. AsweshallseelaterthecontrollersarenotjustproportionalcontrollersbutnormallyPI-control-lers.InexceptionalcasesPID-controllersmaybeencountered.
3.2 Advantages of internal current control
The current control circuitisespeciallyactivewithchanges in the motor load torque. The shortcontroltime(7or10ms)inthecurrentcircuitdonotallowtheloadvariationstoaffectthespeedcontrolsincethearmaturecurrentisquicklyadjustedtotherequiredvaluebythenewloadtorque. Withthisinternalcurrentcontrolthemaximummotorcurrentiseasilycontrolled.Ifwelimittheinputcurrentcontrollertoforexample120%ofthenominalvalueofthearmaturecurrent,thenthyristorbridgeandmotorareprotectedagainstoverloadandagainstahighstartcurrentsurge of the motor. Current limitationisespeciallyimportantwhenquick speed changes are required from themachine.Ifthemotorloadhasalargemomentofinertiathenlarge(required)speedchangescannotbefollowed.Ifthespeedset-pointissuddenlyraised,thenthecontrolleroutputwillwanta much higher armature current than the nominal armature current. The current limitation sees to itthatthenominalvalueisnotexceeded.Withconstantfluxandnominalarmaturecurrentduringacceleration the motor will maintain an almost constant torque M ≈ M em=k2 . I a . Φ.If the counter torque of the mechanical load is M t , then the difference M v = M − M t will cause the machine to accelerate according to M v = J m.(dω/dt). Here dω/dt = acceleration; J m = moment of inertia. If M v is constant then the machine will acceleratelinearlytothedesiredspeed. Ifthedesiredspeedislessthantheactualspeedthenwithsinglequadrantoperationthemotor willruntillthedesiredspeedisreachedandthiswithzeroarmaturecurrent.
Remark
Whyisthearmaturecurrentlimitsetto120%ofthenominalarmaturecurrent? Verysimplysinceafullyloadedmotor(I a = I a nominal ) could no longer accelerate if we should limitthecurrentto100%.
!

19.14 SPEED- AND (OR) TORQUE-CONTROL OF A DC-MOTOR
Numeric example 19-2: Given: . DC-motor:220V/10A/1.76kW/1000rpm/R i=1Ω. tachogenerator:constantis10V/1000rpm. B 6-controlledrectifierwithimpulsemodule:V control = 0 to 10V gives V diα = V a = 0 to 220V . controlcharacteristic:fig.19-12 Toenablemaximumuseofthisnumericexampleanumberofvaluesareindicatedinthis characteristic.
Fig. 19-12: Control characteristic of a B 6 - Bridge
Required: 1. Withn=250rpmandwith50%motorloaddeterminetheinputandoutputvaluesofthe different“blocks“infig.19-11.Theinternalcurrentcontrolandcurrentlimitationareinactive.
2. Thesamequestionbutnowwithn=500rpm,50%motorloadandactivecurrentcontrolasin fig.19-11.
Vdi = Va
220
162,5
110
57,5
180150120906030 42 74°50'0
01,6833,335,310
Vcontrol (V)
α
α

SPEED- AND (OR) TORQUE-CONTROL OF A DC-MOTOR 19.15
Solution:Tomakethesolutionasshortaspossiblewewillignorethetransientbehaviour,andonlyconcen-trateonthefinalsteadystatevalue.Thetransientbehaviourofasinglequadrantdriveisstudiedunderoptimisingthecontrollers(p.19.34). Fromthenameplateofthemotorweobtainthefollowing:
at full load, V a = 220V and n =1000rpm:
I a = 10 = V a − E
______ R i = 220−E _______ 1 or: E = 210Vat1000rpm
The normalised emf e N is: e N =0.21V/rpm The nominal torque is: M = 9550 . P _______ n = 9550x1.76 _________ 1000 = 16.8 Nm 1. n=250rpm-50%motorload . M t=50%.16.8=8.4Nm . I a=50%.10=5A . n=250rpm→→E=250.e N=250.0.21=52.5V . V a = E + I a . R i=52.5+5x1=57.5V . Fig. 19-12: V diα=57.5=220.cosα→→α=74°50’→→V control = 1.683V . Thesinglequadrantcontrollerwithoutinternalcurrentloopisdrawninfig.19-13.
Fig. 19-13: SpeedcontrolledDC-motorat250rpm
+ 10 V
(n*)
+
-
pulse unit
T
M
Im
GRID3
2,5V74°50'
2,5V
1,683V0V
(n)
Vcontrol
B6 - controlled rectifier
E = 52,5V
Va = 57,5V
Ia
F1
F2
5A
5A5V
2,5V
Ri1W
VI
8,4 Nm
8,4 Nm
250 tr/min
MMt
n
PI
0 - 10A0 - 10V
Φ
α
speedregulator
ε

19.16 SPEED- AND (OR) TORQUE-CONTROL OF A DC-MOTOR
2. n=500rpm-50%motorloadTosetthedesiredspeedn * = 500rpmweadjustthewiperofthepotmeterfrom2.5Vto5V.Inthefirstinstantthemotorremainsrotatingataspeedof250rpmandthetachometerproduces2.5V.Theerrorvoltage εbecomes5−2.5=2.5V.The n-controllerimmediatelymakesajumpatitsoutput(proportionalpartofthePIcontroller)andatthesametimethecontrollerbeginsto integrate(I-part)sothattheoutputvoltageofthe n-controllerreaches10Vinanumberofms.WithV control =10Vthenα=0°andV diα = V a = 220 V. Due to the inertia of the motor with its driveinthefirstinstantEremainspracticallyunchangedatE=52.5Vsothat: I a =
V a −E ______ R i
= 220−52.5 ________ 1 =167.5A! Toomuchforour10AmotorandalsofortheassociatedSCRbridge.Wearecompelledtolimitthearmaturecurrentandmaintainitwithinsafeoperatingvalues.Theonlywaytodothisistomeasure the current I a withacurrentsensorandtocontrolthiscurrenttobelowanadjustable(acceptable)maximum.Forthisreasontheinternalcurrentloopoffig.19-11isnowactive.Thisisshowninfig.19-14withthecurrentlimitedto9A,andspeedset-pointn*=500rpmwiththemotor50%loaded.ThecurrentsensorisfollowedbyanI/Vconverterthatforexampleconverts0-10 A to 0-10 V.
Fig. 19-14: Single quadrant DC-motor at n=500rpm,M t = 0.5xM=8.4 Nm and I amax = 9A
E = 500x e N =500x0.21=105V; V a = E + I a . R i = 105+5x1=110V V diα = 110 = 220 .cosα→→α= 60°→→ V control = 3.33V
+ 10 V
(n*)
speed regulator
+
-
+
-
1
currentregulator
control unit
T
M
Im
GRID3
5V 5V 5V 260°
5V 5V
0V 3,33V
(n)
Vcontrol
B6 - controlled rectifier
E = 105V
Va = 110V
Ia
F1
F2
5A
5A5V
5V
Ri1W
VI
Mt
8,4 Nm8,4 Nm
500 tr/minM
n
limited at 9V(Ia = 9A!)
α
Φ
ε ε

20.18 SPEED-ANDTORQUE-CONTROL:3-PHASEASYNCHRONOUSMOTOR6.3 Control range
Wedefinethecontrolrange= (20-11)
. Electromechanical torque
IntheassumptionthatthenominalmotorcurrentI n isflowing,itfollowsfrom(20-6)thatthetorque M em proportionallychangeswithΦ .
In thefieldweakeningareaΦ=k1 . V S / f S=k1 . constant _______ f S , so that the torque: M em ~ 1/ f S ~ 1/n. Thisisindicatedbythehyperboleinfig.20-17.
. Maximum torque
In thefieldweakeningareaV S is constant. From (20-8) it follows that in this area the maximum torque quadratically decreases with increasing frequency f S .AboveF 7 the motor cannot run with constantpower,seefig.20-17.Therangewhereinthemotorpowerremainsconstant(uptof 7 ) dependsuponM n / M po intheareawithnominalfluxΦ n . Often for a motor M n /M po = 0.5, so that : f 7 ≈ 2 . f 4 . From f 7 the motor can only deliver a certain percentageofitsmaximumtorquebecauseofthelosses.Inthisareaof“higherspeed”M em is inverselyproportionaltof S 2 .
Fig.20-17:M-ncurvesofathree-phaseasynchronousmotor
smallestspeedbynominalflux
_____________________________ largestspeed(infieldweakeningarea)
0 f1 f2 f3 f4 f5 f6 f7
M
Mpo
(In = constant)
Mn
Mmax.
nominal flux field weakening
1fs
fs
2
2
Mem1fs
Mem1
fs (Hz)
n (rpm)constant torque constant power higherspeed

20.46 SPEED-ANDTORQUE-CONTROL:3-PHASEASYNCHRONOUSMOTOR
7.5 Coordinate transformation
7.5.1 Transformation formulas
ThefluxcreatingandtorquecreatingcomponentsofthefictivecoilsDandQareinrealityob-tainedfromtwovariable(e.g.sinusoidal)currentsi α and i β intherealcoilsofourtwo-phasemotor.Thesecoilsarefixedinthestator.Wedrawtheα-β coordinate system that is related to the stator insuchawaythatthecoilαproducesafluxaccordingtotheα-axisandcoilβ according to the β-axis.(fig.20-42).
Fig. 20-42:Equivalenttwo-phasestatorcoordinatesystem
Weknowfromfig.20-31thattherotatingfieldinthestatorhasanangularvelocityωS . As with thethree-phasemotortherotorispulledalongwithaspeedn < n S . TherotorhasarotorfluxΦ R which also rotates at ωS rad/s,similartothethree-phasemotor.IfwenowallowthefictivecoilsDandQ(andthereforethed-qcoordinatesystem)torotatewiththerotorfluxΦ R asinfig.20-41,thenwecandrawfig.20-43.
β
α
α
β β
α
ΦR
ωS
λ(t)

SPEED-ANDTORQUE-CONTROL:3-PHASEASYNCHRONOUSMOTOR20.47
Fig. 20-43: d-qcoordinatesystem,linkedtotherotorflux
The current i α producesthecomponentsin: . d-direction: i dα = i α .cosλ . q-direction: i qα = − i α .sinλ The current i β producesthecomponentsin: . d-direction: i dβ = i β.sinλ . q-direction: i qβ = i β .cosλ The currents i α and i β fromthestatorcoordinatesystem(α,β)providecurrentsi d and i q in a coordinatesystemthatrotateswiththerotorfluxΦ R : . i d = i dα + i dβ . i q = i qα + i qβ or: (20-20) (20-21) Conclusion:Theexpressions(20-13)and(20-14)giveforathree-phaseinductionmotorthecurrents i α and i β astransformedcomponentsofthethree-phaserotorcurrent(i S1 , i S2 , i S3 ). Thisequivalentsystemα-βisfixedtothestator.Wecallittheα-β stator coordinate system. The coordinatesystemd-qwithitscomponentsi d and i q arecalledthefieldcoordinatesystemsincetheyarefixedtothe(rotor)flux. Theexpressions(20-20)and(20-21)describethetransformationfromstatorcoordinatesystemto(rotor)fieldcoordinatesystem.ThisisknownastheParktransformation.
i d = i α.cosλ+iβ.sinλ i q = i β.cosλ− i α.sinλ
β
α
q
iqβiβ
iα
idβ
ia
iβ
idα
iqα
d
0
ΦR
λ
ωs
α
β

20.56 SPEED-ANDTORQUE-CONTROL:3-PHASEASYNCHRONOUSMOTOR
Fig.20-54showsfinallyablockdiagramwithassociatedPI-controllersforfieldorientatedspeedcontrolofaninductionmotorwithimposedstatorcurrents.
Fig.20-54:Speedcontrolofinductionmotorinfieldcoordinates(indirectmethod)
7.6.5 Applications with closed loop control
Frequency controllers with vector control are used in: cranes,elevators,liftingequipment,extruders,papermachines,rollingmillsintheproductionofsteel,CNC-machines,cablelayers(shipbased),drumsetc.
n - c
ontro
ller
field
wea
keni
ng
i - c
ontro
ller
limite
rn*
+ -
+ -
+ -
+ -
Mn
i q*
i α* i β*
Φ -
conr
olle
ri d*
i s3* i s2* i s1*
ΦR
L 0k 2
ΦR
M
*
M*
ejλ2/
3
cosλ
sinλ i q i µ
iµ
calc
ulat
ion
mod
ule
ωi s
i s1i s2
CR
-PW
Min
verte
r
M T3
GR
ID

20.66 SPEED-ANDTORQUE-CONTROL:3-PHASEASYNCHRONOUSMOTOR 7.8.3 Moment of work torque
Asshowninfig.20-65theworktorqueinfig.20-69isproportionaltotheareaofthetriangle
formedby→
i S , L R
__ L 0 . →
i R . e jδ and →
i µ .Thisareacanalsobedescribedinfig.20-69as:
1/2 . i q . i µ so that: M em=k2 . i µ . i q (20-39)
With Φr = L 0 . i µ is M em=k3 . i q.ΦR (20-40)
Another method is to assume that M em isproportionalwiththeproductoftherotorfluxwiththecomponentof
→
i S thatisperpendiculartothisrotorflux.Infig.20-69thisleadsto:
M em=k3 . i S.sinε . Φ R , so that: (20-40)
Calculation leads to : k3 = 3.p
____ 2 . L 0
___ L R with p=numberofpolepairspermachine.
7.8.4 Mathematical model in field coordinates With
→
i µ = i µ . e jλ (20-37) becomes:τ R . d __ dt (iµ . e jλ)+(1−jω.τ R).iµ . e jλ =
→
i S
τ R . e jλ . d→
i µ ____ dt +τR . i µ . j . dλ __ dt . e jλ+(1−jω.τ R).iµ . e jλ =
→
i S
τ R . d→
i µ ____ dt + τ R . i µ.j.ωS+(1−jω.τ R).iµ =
→
i S . e −jλ
From (20-24):
→
i S(t)=iS . e jθ it follows:
→
i S . e −jλ = i S . e j(θ−λ) = i S . e jε (20-41)
Thismaybeexpressedinthecomplexd-qcoordinatessystemas:
→
i S . e −jλ = i S . e jε = i d + j. i q
so that: τ R .
d→
i µ ____ dt + τ R . i µ.j.ωS+(1−jω.τ R).iµ = i d + j . i q
Takingtherealandimaginarypartsseparately:
. τ R . d→
i µ ____ dt + i µ = i d (20-42)
. (ωS −ω).iµ . τ R = i q (20-43) Multiplying(20-42)with L 0 : τ R .
d→
ΦR ____ dt +ΦR = L 0 . i d (20-44)
M em=k3 . i q.ΦR

SPEED-ANDTORQUE-CONTROL:3-PHASEASYNCHRONOUSMOTOR20.67
Rewritingof(20-44)usingLaplacenotations: τ R.s.ΦR = L 0 . I d
ΦR ___ I d = L 0 . 1 ________ 1+s.τ R
ThisisthetransferfunctionofafirstordersystemwithtimeconstantτR =
L R __ R R (fig.20-70)
ThefluxΦ R isdeterminedbyi d !
Fig.20-70:Transferfunctionofrotorflux
From(20-43)theslipfollows:g=ωS−ω ______ ωS =
i q ________ i µ . τ R.ωS
Withi µ =
ΦR ___ L 0 then g=
L 0 _____ ΦR . τ R .
i q ___ ωS
From (20.43) we can derive: (20-45) Themathematicalmodelofathree-phasesquirrelcageinductionmotorinfieldcoordinates (referencecoordinatesasfieldcoordinatesrotateswithrotorflux)isgivenby: (20-40) (20-44) (20-45) Ifwenowdeterminethestatorcurrentcomponentsateveryinstantinacoordinatessystemthatrotateswiththerotorfluxthenthetorqueoftheinductionmotormaybecontrolledexactlyas withaDC-motor.InfacttheexpressionM em=k3 . i q . Φ R iscomparablewiththeformulaforthemoment of work torque of a DC-machine: M em=k2 . I a . Φ (19-2). WithaninductionmotorΦ R canbekeptconstantorcontrolledviai d as (20-44) suggests. Thespeednoftheinductionmotorcanbecontrolledwith(20-45)byinfluencingωS and i q .Infactwithfieldorientationviamathematicaltransformationthewayisopentocontrolthetorqueof an induction motor in the same way as with a DC-motor.
ωS −ω= L 0 . i q
______ ΦR . τ R
M=k3 . i q.ΦR τ R .
dΦR ____ dt +ΦR = L 0 . i d
ωS −ω=
L 0 . i q ______ ΦR . τ R
Id ΦRL0 τR

21.12 CONTROLAPPLIANCE,SR,3-PHSYNCHR.,INDUCTIONSERVOMOTOR
Fig.21-17showsatypicalthree-phaseSR-converter.SincethestatorcoilsofanSRMaretotallyinsulatedfromeachotherafaultinonestatorcoilwillhavenoeffectonother“legs”ofthecon-verter.Themotorcanremainoperatingevenwithafaultycoil,althoughwithcopperlosses.Notealsothatthecurrentthroughaphasewindingalwaysflowsinthesamedirection.Opposingpolesareprovidedwithwindingswhichareinparallelorinseriesandeachformsastatorcoil. Thepolarityofthemotortorqueisindependentofthecurrentdirectionthroughthestatorcoil. Itisthepositionoftherotorteethwithrespecttothestatorthatdeterminesthedirectionof rotation. Infactthediodesoperateasfreewheeldiodes.Thetransistorsarealwaysinserieswithacoilinwhichthecurrentalwaysflowsinthesamedirection.Theproblemofprotectionisalotsimplercomparedtothethree-phaseinverterofaninductionmotor.TheseSRM-convertersaremorerobustthanclassicthree-phaseinverters.
Fig.21-17:Typicalthree-phaseinverterusedtosupplyanSRM
2.5 Speed-, position- and torque control
ThetopologyofaclosedcontrolloopiscomparabletothatofaDC-motor.WithanSRM inadditionfeedbackoftherotorpositionisrequiredforcommutationoftheinverter. Fig.21-18showstheclosedloopforapositioncontroller.
Fig. 21-18: Position control using an SR-motor
D2
D1
T1
T2
S1
D4
D3
T3
T4
S2
D6
D5
T5
T6
S3
+Vcc
positioncontroller
velocitycontroller
currentcontroller inverter
PG
SRMθ* n* i* i
i
+
-
θ θ θ
θ / n
rotor position

ELECTRICALPOSITIONINGSYSTEMS22.3
Remarks
Thename“servomechanism”isoftenreservedintheliteratureforapositioningsystem.
Forhigh-dynamicpositioningandtorquecontrolelectricalservo-systemsusedonlyDC-servomo-torsorpermanentmagnetsynchronousmotors. Duetothetechnologicaldevelopmentsinthepreviousyearsthefluxvectorcontrolofanasyn-chronousmotorhasdramaticallyimproved.Theresultisthatthisvectorcontrolisnowcapableinmanyapplicationsofcompetingwithtraditionalservo-systems.Theborderbetweendrivesystemandservo-systemisbecomingmorevague.Certaincompany’ssuchasYaskawausea“radar”cardonwhichthedifferencesinperformancebetweenservo-systemsandfluxvectorcontrol(VC)areindicated.Thisisshowninfig.22-1.
Fig. 22-1: Points of difference servo-system with VC-system Source : YaskawaandControlEngineering
10
110 10 0.1
110
1001,000
1
0.1
0.01
1001000
10
101
0.1
0.01
100
1,000
10,000
1
0.1
0.01
speed regulation range (X : 1)
acceleration time(s)
cycles/min
position accuracy (°)
frequency respons (Hz)
speed regulation (%)
SERVO
VECTOR
CONTROL
!

22.16 ELECTRICALPOSITIONINGSYSTEMS
Fig.22-12showstheprincipleconfigurationofaDC-servo-system.
Fig. 22-12: DC-servo-systemwiththethreecontrolloops
3.4.2 Controlled speed
Once the value ωSC isreachedthespeedcontrollercomesintoaction(SC=SpeedControl).Dependingonthesettingfor ωSC *
, the ωofthemotorwillbecontrolledsothatω = ωSC * .
3.4.3 Delay
Inordertostopatthedesiredpositionatime t 3 hastobedeterminedatwhichthemotorshouldstarttodecelerate.Inrealitywedeterminethenumber(k)ofpulsesthattheencoderstillneedstogiveuntilthemotorshaftisattheset-pointlocation. Expression(22-11)allowsforcalculationofthenegativevalue I a required to decelerate with a
value γ=−dω ___ dt Fig. 22-13a shows that ωSC=(t4−t3).γ.Fromfig.22-13bitfollowsthattheshaftofthemotoris
rotatedbyanangleθ = ( t 4−t3 ) . ωSC
___ 2 between t 3 and t 4 . Elimination of ( t 4 − t 3 )inbothofthepreviousformulasgives θ=(t4 − t 3).
ωSC ___ 2 =
ωSC ___ γ . ωSC
___ 2 = ωSC 2
____ 2.γ
Assumethatthespeediscontrolledat3000rpm,then: ωSC = 2 . π . n ______ 60 =314.1593rad/sIfforexample(accordingtothemicro-controllercountdown)wearestillk= 3800 encoderpulsesremovedfromtheset-pointpositionandtheencodergenerates2000pulses/rev,then: θ=11.938 rad.
µprocessor-board
µprocessor
D / A+
-
waveshaper
+
-
ωsc
ω
* Ia
Ia
*
MOTOR
servoamplifier
TAC
HO
ENC
OD
ER

ELECTRICALPOSITIONINGSYSTEMS22.17
The required delay is then: γ=
ωSC 2 ____ 2.θ = 4133.6925rad/s2
WithJ R + J eq = 3.9 x 10 −5 kg m 2 and K M = 5.4x10−2Nm/Abecomes: I a =
γ.(JR + J eq) __________ K M =−2.985A
Fig. 22-13: Decelerationoftheservomotortoastop
3.4.4 Stopping
Itisclearthatthecalculationaboveisdependentonthelinearoperationduringdeceleration.Thisisdifficulttoknowforamongstotherreasonsbecauseofthedigitalcontrolofthespeedwhichisalwaysin“steps”.Normallyapositioningsystemiscontrolledinsuchawaythattherotorwithonlyafewoscillationscanbebroughttoahalt.Thetimet S of these oscillations is known as the settlingtime.Mostlythespeedcontrollerisswitchedoffintheregionclosetotheangularpositionset-pointandonlythepositioncontrollerisoperatingsothatwhenthestoppositionisachievedagood holding torque is maintained.
realSTOP
ω
ωSCωSC
-
ω = ωSC
γ = dωdt
0 t3
t = t3
t = t4STOP
t4 ts
t
encoder pulsesk pulses
(a) (b)
θ
(motor shaft)

22.32 ELECTRICALPOSITIONINGSYSTEMS
B. M-n curves
1. Static torque
ThetorquethatisrequiredforastationarySM(zerostepsandnominalcurrentthroughonephase)tomoveonestepiscalledtheholdingtorque.
Fig.22-23: Statictorqueofastepper-motor
2. Dynamic torque
Fig. 22-24: Path of the dynamic torque of a SM
Withahigherstepfrequencytheaveragestatorcurrent(andflux)willdecrease.Thetorquede-creases as a result.
steps
0 1
M
Mh
2
- Mh
∆α
holding torque
pull-out torque
pull-in torque
30
25
20
15
10
5
100
pull - outrate
pull - inrate
maximumslew - rate
200 300 400 500
START-STOP RANGE
pulse rate (Hz)
steps/s
slew range
running
start without error
M (mNm)

22.40 ELECTRICALPOSITIONINGSYSTEMS
F. Micro-stepping
A typicalsmallstepangleofahybridstepperis1.8°(sometimes0.9°).Thiscorrespondsto200(or400)stepsperrevolution.Toobtainahigherprecisionareductionmechanismorgearboxcanbeused.Anelectronicsolutionforobtaininghigherprecisionconsistsof“micro-stepping”. AfullstepoftheSMisdividedintosmallersteps. Assume an SM with ppolepairsontherotor.Forthefullstepdrivewevarythephasecurrentbetween+I f andzeroorbetweenzeroand−I f .Ifwenowchangethephasecurrentinksmall stepsthenitispossibletoorientatethefluxinm=k.p different directions resulting in the rotor assumingmpossiblepositions.Thiscanbeappliedtoathree-phaseSM.Fig.22-38ashowsthebasiccrosssectionofsuchastepper.
Fig. 22-38: Three-phaseSMwiththestatorfluxvector
Infig.22-38bthethreestatorfluxcomponentsareshown.Thesecomponentsarecalledpositive ifforexampletheyinduceamagneticsouthpoleontherotorsideofastatortooth. WithmaximumpositiveandI f2 = I f3 = − 0.5xIf1 weobtainaresultingstatorfluxasshowninfig.22-38c. Apracticalapplicationistochangethestatorcurrentinsmallstepsandthereforethestatorflux,andsuperimposethisonasinusoidalsignalasshowninfig.22-39a. Witha(p=)50-polemachineandk=40wefindthatm=k.p=2000stepsperrevolution.Thisisshowninfig.22-39.Fig.22-39bshowsthefirst11statesofthestatorflux. Themarking1,2,...ofthestatorfluxcorrespondtotheindexes1,2...ofthestatorcurrentchangesinfig.22-39a.Position11infig.22-39bcorrespondswithfig.22-38c.Thismechanismisknownasmicro-stepping.Inthiswaypractically10,000to25,000stepsperrevolutionarepossible.
N
Z
1
2
3
32
1
(a) (b) (c)
1
23
ΦS

ELECTRICALPOSITIONINGSYSTEMS22.41
Fig. 22-39a: Statorcurrentsduringmicro-stepping
Fig.22-39b:Statorfluxduringmicro-stepping
If1
θ
If2
θ
0
If3
θ
0
1 2 3 4 5 6 7 8 9 10
11 109
87
6
5
4
3
2
1
ΦS

22.54 ELECTRICALPOSITIONINGSYSTEMS
9.INTEGRATEDSYSTEM(SIMOTIONFROMSIEMENS)
AsanexampleofanintegratedpositioningsystemweconsiderSimotion(Siemensmotioncontrolsystem).Integratedsystemshavemultipletools.Theuseofstandardmoduleseachwithitsownintelligenceresultsinnotonlytimesavingduringdevelopmentandimplementationofaproject butinadditionthereisamultitudeofapplicationpossibilities.ThecommunicationbetweenthedifferentmodulesoccursviaProfibusandProfinet. Intheupperpartoffig.22-46theSiemensphilosophybehindSimotionisshownandinthelowerfigurethepossibilitiesareshown(hardwareplatforms). Therearethreeplatforms(SimotionC,DandP).
Simotion Disaverycompactsolution.Hereclosedloopcontrol,PLC-functionsandmotioncontrolareintegratedintothemodule.Thisiscomparabletoacertainextenttothe“stand-alone”solutionoffig.22-45. ConnectionoftheSimotionD(fig.22-48)occursviatheET200.TheET200(ET=externalter-minal)isadecentralized(periphery)moduleforcommunication(ProfibusorProfinet)viaalocalnetworkcabletoavoidlongsignalcables.ConnectionoftheSimotionDwithProfibus,Profinet orEthernetresultsinvisualisationandoperatorcontrol. HMI(fig.22-48)means“humanmachineinterface”.
Fig.22-47: Photo of the Simotion D module, clicked ontoaSinamicsS120powermodule
Fig. 22-46: SiemensSimotionphilosophyandhardwareplatforms
PLC functionality
Motion control(positioning, ...)
Technological functions (cams, temperature control,..)
The system philosophy of
SIMOTIONMotion control, PLC andtechnological functions are merged
Engineering system. programming. parameterizing. graphic or textbased programming. testing and diagnostics
Runtime software. PLC. Positioning. Synchronous operation. Camming. Interpolation
Hardware platforms. Controller-based. PC-based. Drive-based

ELECTRICALPOSITIONINGSYSTEMS22.55
Fig. 22-48: SimotionDtopology(drivebased)
Machineswithmultipleshaftsareachallengeforeverypositioncontrolsystem.Thereasonisthateveryshaftincreasestheloadonthesystemandonthebus.WithSimotionthemachinepartsaresplitintodifferentmodules,eachcontrolledbyit’sownSimotionsystem.Theindividualsystemsare then connected via PROFIBUS or PROFINET. The Simotion D version is highly suited for thistypeofapplications,ontheonehandbecauseofit’scompactdesignandontheotherhandbecauseofit’sfastcommunicationwithinamultipleshaftsystem.
Simotion Cisamodularsolutionandhasthelargestfieldofapplication.Therearefourinter-facesonboardforanalogueandstepperdriversandalsomultipledigitalinputandoutputs. Duetothesegregatedarchitecture,drivesandI-OportscanbeconnectedviaPROFIBUSor PROFINET.
Simotion Pisan(open)systemforapplicationswhereanopenPC-environmentisrequired.TobenefitfullyfromtheoptionsofSimotionthereisanengineeringsystem(SCOUT)thatallowsmotioncontrol,PLC,technicalfunctionsanddrivestodealtwithinonetool.Configuring,pro-gramming,testingandcommissioningcanallbegraphicallydealtwithfromone“work”space.Afterthedrivehasbeencommissionedalldatacanberequestedviathecentraladministration. InadditionviaLAD(ladderdiagram),FBD(functionblockdiagram)andtextbasedST(struc-turedtext)thepositioningsequencescanbeprogrammedviaMCC(motioncontrolchart).MoreextensivecontroltaskscanbeimplementedbyusingDCC(drivecontrolchart).
SIMATIC HMI
PROFINETIndustrial Ethernet
ET200 ET200
SIMOTION DSIMOTION D

E-MOBILITY23.1
23 e - MOBILITY CONTENTS
1.Renewableenergy 2. Electric traction 3.Electricautomobile 4.Electricboats 5.Electricbicycles
Atthestartofthetwentiethcenturytherewerealreadyelectriccarsinexistence.Duetothecheapavailabilityoffossilfuelstheelectriccarwasunabletocompetewiththebenzineengine.Inad-ditiontheactionradiusofelectriccarswassmallduetotheproblemoflimitedenergythatcouldbestoredinbatteries.Aproblemthatwestillhavetoday.Goodbatterytechnologyisprobablythemostimportantconditionforthemassbreakthroughofelectricauto-mobiles. Inadditiontoroadtransporttherehasalwaysbeenelectrictraction(train/tram/metro).Inaddi-tionelectricbicycles,scootersandsailingvesselsarecandidatesforelectricdrives.Thecompletepacketofelectricaltransportisreferredtoaselectro-mobilityorinshorte-mobility. E-mobilitydealswithspeedsfrom25km/h(bicycle)tomorethan200km/h(train)andthiswithpowersof250W(bicycle)tomorethan9MW(train).Electriccarsaresomewhereinbetweenwithpowersofbetween40and200kWwithmaximumspeedsbetween80and200km/h. Inthischapterwelookatanumberofexamplesoftraction,carsandboatsasapplicationsofelec-tronic motor control.

23.2 E-MOBILITY
1.RENEWABLEENERGY
Sincefossilfuels(oil,gas,coal)arequicklybecomingscarce,inthefuturee-mobilitywillbe suppliedbyrenewableenergy.Theenergyonearthcomesforalargepartfromthesun.There-maindercomesfromtheheatoftheearth,tidepowerandnuclearenergy.Thesunproduces3.89.10 26watt.Theearthisatadistanceof150millionkmfromthesunandabout174petawattreachestheearth.Rightnowhumanityconsumesabout15terawatt,thisislessthanonetenthousandthof174petawatt!Thefollowingtableisamemoryaidinconnectionwithmultiplesandsubdivisionsofunits.
Table 23.1
Canwesatisfyourenergyneedswithsolarpanelsandwindmills?Asmallcalculationshows: . 174petawattofsolarenergyreachestheearth . 25petawatthitsthegroundasradiationenergy.Ifwecouldconvertonethousandofonepercenttoelectricalenergythenwewouldhave25TW,morethanthecurrentconsumptionoftheentirepopulationoftheplanet . 0.5%ofthesunsenergyisconvertedtoaircurrents.Ifwecouldconvert2%ofthiswithwindmillsintoelectricalenergythenwewouldhave174x1015x0.5%x2%=17.4TW.Thisisstillmorethantherequired15TWoftheentireworld. Wewillgeneraterenewableenergyinthemostfavourablelocations(solarpanelsintheSaharaandwindmillsintheseaandoffthecoastofMexico!).Thentheproblempresentsitselfofanelectri-cal-networkcapableoftransportingtheenergyovervastdistances. Suchanetworkiscalledasuper-grid. AstransmissionsystemHVDC(highvoltagedirectcurrent)presentsitselfasacandidate. DC-cablesarecheaperthanAC-cablesandthelossesofHVDCarelessthan3%per1000m. Thedisadvantageisthehighinvestmentcostsoftheconvertersatthebeginningandendoftheline.Thisisonlyviableforlargedistancesandheavyloads.Asuper-gridrequiresinternationalcooperationandenormousinvestment.
SUBDIVISIONS MULTIPLES
yocto = 10 −24 kilo = 10 3
zepto 10−21 mega 10 6
atto 10 −18 giga 10 9
femto 10 −15 tera 10 12
pico 10−12 peta 1015
nano 10 −9 exa 10 18
micro 10 −6 zetta 1021
milli 10 −3 yotta 10 24

E-MOBILITY23.3 2. ELECTRICAL TRACTION
Electrical traction (tram, train, metro) occurs over a rail network (train) or over a local city net-work(tram,metro).Inadditionanumberoflocaltracksexistforexampleinfactories.
Therollingstockismostlycomprisedofamotorisedpart(locomotive),followedbypassengerorfreight carriages. Electriclocomotiveshavespeedsofupto230km/handpowersofmorethan9MW.
Thereareinternationaldifferencesinthesupplyviatheoverheadlinesandrail.Wefind1.5kVDC,3kVDC,15kV-162 __ 3 Hz,25kV-50Hz,mixed3kVDC/25kV-50Hz.Inadditionthereisasystem with a DC third rail. This is usually in metro systems. Anumberofexamplesofstandardvoltages:Germany(15kV-16.2 __ 3 Hz),France(25kV-50Hz),Belgium(3kVDCand25kV-50Hz),Netherlands(1.5kVDC). Turkey,IndiaandtheCongoalsoworkwith25kV-50Hz.ThenewelectrificationnetworksinWesternEurope90%ofmakeuseof25kV-50Hz.Foreaseoftransportoninternationallinesmultiplevoltagelocomotivesareused. UrbantransportoperateswithDC:400V/600V/650V/750V/900V. Mostcommonare600Vand750V.
Inadditiontothe“classic”train/tram/metroanothertermhasbecomepopularinrecentyearsnamely“lightrail”.Thereisnocleardefinitionforthistermsince“lightrail”ismoreacollectivetermforfasttrams(interlocal),railvehiclesthatoperateontramandtraintracksandlightweighttrains(lightandcheaptrains).ThereisforexampletheDocklandsLightRailwayinLondoninwhich you can connect from a metro and ride to the Docklands. SpecialmetrolinesareforexampletheThais“SpecialSkytrainBangkok”withamaximumspeedof80km/handoperatingon750VDC-thirdrail,ortheautomaticmetroinNuremberg-Germanywhichoperateswithoutdriver.
In additiontospeedthereisalsothefactoracceleration/deceleration.Itisacceptedthatthecom-fortvalueofaccelerationanddecelerationis1m/s2 .
Withregenerativebrakingthemotoroperatesasgenerator.Theenergyiseitherreturnedtothepowergridorstoredinbatteriesorsupercaps. Supercapsarecapacitorswhichcanstorealargeamountofenergy.Table23-2providesanidea oftheenergydensityandlifespanofbatteriesandsupercaps.
Table 23-2
COMPONENT ENERGY DENSITY LIFE SPAN
Leadacidbattery 30-50Wh/kg 3-5years
Li-ion 90-150Wh/kg 5-10years
Supercap 3-5Wh/kg unlimited

23.4 E-MOBILITY
2.1 The Flexity Outlook Tram (Brussels) by Bombardier Transportation
Fig.23-1showstheblockdiagramoftheprimaryelectronicsoftheBrusselstram.TheFlexityOutlooktrambyBombardierTransportationhastwomodels.The“long”tramhasalengthof43.2mandthe“short”modelis31.8mlong. Thetramisconstructedwithfour(six)asynchronousmotorsdependingonthemodel. Everymotor(photolowerrightonp.23.5)isdesignedfor3x430V-60Hzandhasanominal powerof112kW.ViapantographPT,powerswitchDJandinputfilterL 10 -C,the650Vsupplyisappliedtotheinverter.ThisinverterisconstructedwithIGBT’s,operatesaccordingtothePWMmethod,hasaswitchingfrequencyof2.5kHzandisdrivenbyacomputerboard(withmicropro-cessorMC68360,DSP56203andFPGAXC4013). Theoutputfrequencyoftheinverteris0to300Hz. At150Hzthetramspeedis70km/h. Duringbrakingenergyisregeneratedaslongasthecatenarywirevoltageislessthan920V. Above920Vitisswitchedovertodissipationbrakingviathebrakechoppertoresistorsof2.6Ω.
Onthelowerleftofp.23.5thereisaphotoofatractionconverter.
Fig. 23-1: BlockdiagramoftheprimaryelectronicsofaFlexityOutlooktram(BombardierTransportation)

E-MOBILITY23.5
Photo Flexity Outlook:TraminBrussels(Bombardiertransportation)
PhotoBombardiertransportation: PhotoBombardiertransportation: Tractionconverterofthetramshownabove Motorofthetramshownabove.Thegreyparthas (Dimensions:b=1600mm;h=450mm; dimensions850x385mm d=1255mm;Weight424kg)

EV.16 EVALUATION: SOLUTIONS
8.12 Fig. 8-19:
v ;fig.8-21:
v
8.13 Φ=72°20’; α=60°→→ (8-13): V diα =103.5V α=105°→→ (8-11): V diα =26.52V 8.14 Φ=60°;fig. 8-4 →→ δ=240°;(8-5)→→ V diα =51.76V (8-5) →→ V di =
v ___ 2 π .(1+0.438)=74.46V;I T(AV)max =10.26A and V RRM ≥325V
8.15 Φ=60°→→ α=30°→→ (8-13) →→ V diα = 179.29V α=60°→→ (8-13) →→ V diα = 103.5V α=90°→→ δ=233°→→ (8-11) →→ V diα =62.30V8.16 a)
v
b)
v with 90° ≤ α < 180° 8.17 No.ConsiderforexampleTh1 and Th 6 with there driving voltage v 12 . At ωt=120°,v 12 is negative so that Th 6cannotfire.Thesameconclusioncanbemadefortheothersemi- conductorpairs
8.18 Start-up:α= φ 1 =90°→→ Q 1α = V di . I d (x1.5)=150kvar
8.19 P= V RMS 2
_____ R b
HALF WAVE: α=0°:P max =0.5/ R b ; α=30° : P 1 =0.4855/ R b α =150°:P 2 =0.0144/R b for the ratios: P 1 / P max=97%and P 2 / P max =3% FULL WAVE: α=0°:P max =1/ R b ; α =30° : P 1 =0.97/ R b α =150°:P 2 =0.03/R b for the ratios: P 1 / P max=97%and P 2 / P max =3% 8.20 I 1 =
√___
6 . I dα _______ π =12.1A;I k =
I 1 __ k →→ I 5=2.42A; I 7 =1.73A
Table8-4→→ 300Hz:V kα =21 ___ 100 . V di = 65.22V;
600Hz:V kα =10.29 _____ 100 . V di = 31.96V; 8.21 Fig. 8-6: α=60° →→ X 3 =0.115x230x√
__ 2 →→
i 3=0.374A
α=90° →→ X 3 =0.153x230x√__
2 →→
i 3=0.497A 8.22 (8-29) and (8-30) →→ I 7 =
√___
6 . I d . cosα ____________ π.7 with I d =
V di ___ R (8-25) →→ V di =540V→→ I 7 =10.42A

EVALUATION: SOLUTIONS EV.17
8.23 Fig. 8-41
Fig. 8-41
The v o =f(x)axesisthesameaspreviouslyfoundinfig.8-34,sothattheexpressionforωt=f(x)in fig.8-34isalsovalidhere 8.24 B 2 -controller: p=2→→
v . p __ π sin π __ p =
v . 2 __ π . sin π __ 2 = 2 .
v ____ π
M 3 -controller: p=3→→
v . p __ π sin π __ p =
v . 3 __ π . sin π __ 3 = 3 √
__ 3 .
v _______ 2.π
B 6 –controller: p=6→→
v . p __ π sin π __ p =
v . 6 __ π . sin π __ 6 = 3 .
v ____ π
8.25 α =0°→→ cosα=1→→ V k0° ____ V di
= √__
2 _______ ( k 2 −1)
. √______________
k 2 −( k 2 −1) = √__
2 _______ ( k 2 −1)
α =90°→→ cosα=0→→
V k90° ____ V di = √
__ 2 _______
( k 2 −1) . √
____ k 2 = k . √
__ 2 _______
( k 2 −1)
V k90° ____ V k0° =k. Table8-4:examplek=2→→ α=0°→→
V kα ____ V di =47.14%
α=90°→→
V kα ____ V di =94.2%
0 0
0 0
v0 v0
v0v0
v1 v2 v1 v2 v3 v1
XX
(a) (b)
/p/p
2.2.
2./p2./pα α
α - /p α - /p
ωt ωt

VOCABULARY VO1
ENGLISH DUTCH GERMAN SPANISHabscissa abscis Abszisse abscisaAC controller wisselstroominsteller Wechselstromsteller Controlador ACaccelerationtorque versnellingskoppel Beschleunigungsmoment torquedeaceleraciónAC-controller AC controller AC-Kontroller Controlador ACactivecomponent actievecomponente aktiveKomponente componenteactivoactivepower aktiefvermogen Wirkleistung potenciaactivaaerodynamic aërodynamisch aerodynamisch aerodinámicoairgap luchtspleet Luftspalte entrehierroalgorithm algoritme Algorithmus algoritmoalternating current (AC) wisselstroom Wechselstrom corriente alternaambienttemperature omgevingstemperatuur Umgebungstemperatur temperaturaambienteamplifier versterker Verstärker amplificadoranalogons analogons analogesModell modeloanalógicoanaloguecomputer analogecomputer Analogrechner ordenadoranalógicoanalogue analoog analog análogoangulardisplacementsensor hoekstandopnemer Winkelencoder sensordeposición angularangularposition hoekpositie Winkelposition posiciónangularanode anode Anode ánodoanodizing geanodiseerd eloxiert anodizadoantistaticpackaging antistatischeverpakking antistatischeVerpackung Empaqueantiestaticoapparentpower schijnbaarvermogen Scheinleistung potenciaaparenteappliancemotor huishoudelijkemotor Haushaltmotor motordomésticoapplications toepassingen Anwendungen aplicacionesarcfurnace boogoven Lichtbogenofen hornodearcoarmaturereaction ankerreactie Ankerrückwirkung reaccióndearmaduraarmature anker Anker armaduraasynchronous motor asynchrone motor Asynchronmaschine motor asincronoauxiliarypole hulppool Hilfspol poloauxiliarauxiliary thyristor doofthyristor Löschthyristor tiristor auxiliarauxiliarywinding hulpwikkeling Hilfswicklung arrollamientoauxiliaravalanchediode zenerdiode Zenerdiode diodozeneraverageresistivity soortelijkeweerstand spezifischerWiderstand resistividadmediaaverage value gemiddelde waarde (arithmetischer) Mittelwert valor medioback-to-back(SCRs) antiparallel(SCRs) antiparalleleVentilen SCRsenantiparalelosballast ballast Vorschaltgerät balastbandgap(energygap) bandafstand Energielücke(Bandabstand) bandaprohibidabandwidth bandbreedte Bandbreite anchuradebandabankofaccumulators accubatterij Akkumulatorenbatterie bateriadeacumuladoresbarrierlayer sperlaag Sperrschicht capadebarrerabasevoltage basisspanning Basisspannung tensióndebasebase basis Basis basebatterycharger batterijlader Batterieladegerät cargadordebateríabiasing voormagnetisatie Vormagnetisierung polarizaciónmagnéticabidirectional bidirectioneel bidirektional bidireccionalbipolartransistor bipolairejunctietransistor bipolarerTransistor transistorbipolarbistable bistabiel bistabil biestableblockdiagram blokschema Blockschaltbild diagramaduncionalblockorientated blokgeoriënteerd blockorientiert bloqueorientación



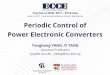
























![[123doc.vn] - Power Electronic Control](https://img.dokumen.tips/doc/110x75/577cc5681a28aba7119c48d6/123docvn-power-electronic-control.jpg)
