-
7/29/2019 Elasticity Edited
1/30
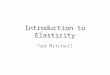
Stress at a Point
P1Fn F Pn
S2
Fs2P2
An
Fs1F
S1
P1 A
P2F is the internal force acting on the elemental area A at the
point p(n)
We assume LIM F/ AA 0
Exists and unique.
S1 and S2 arbitrary directions but orthogonal
n: Normal stress component at the point P(n) In the direction
n
n = LIM Fn/ AA 0
Similarly s1 = LIM Fs1/ A
A 0 s1 = LIM Fs2/ A
A 0Implied in the notation is
a) Stress varies with location of Pb) Stress varies with
orientation of n
Stress on any three independent planes at apoint define the
state of stress at pointuniquely.
In Matrix notation : At
t =
T
zyx
-
7/29/2019 Elasticity Edited
2/30
Tkji ,,
zzyzx
yzyyx
xzxyx
A
The matrix A obeys the mathematical properties which are typical
of the entities called tensors.Hence A is called stress tensor.
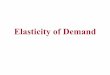
Stress vector on an inclined plane
n : Normal to the inclined plane = l i +m j +n k
Y j h : Altitude of tetrahedron
dAn : Area of inclined face
P : Body force vector /unit massn
P )( z dAz dv : Volume of tetrahedron
n )( x : Stress vector on negative x-plane )( x
dAx x i
)( y dAy
z k
Consider equilibrium of the tetrahedron
amF )( x dAx+ )( y dAy + )( z dAz+ n dAn + dvp = adv
---------------(1)
a = Acceleration vectorWe can show thatdAx = ldAn, dAy = mdAn,
dAz = ndAnEquation (1) becomes
)( x ldAn + )( y mdAn + )( z ndAn + n dAn+ 1/3h ndAp =1/3h
adAn
As h 0 Stress vector over inclined plane becomes stress vector
at the origin in the directionof n .
As h 0 0)()()( zyxn nml -----------------------(2)
Let : n = xn (Along X-Axis)Then : l =1, m = n =0
xn
-
7/29/2019 Elasticity Edited
3/30
From Equation (2) : 0)( xx
)( xx
Similarly yy )( ,
zz )(
Equation (2) becomes zyxn nml ---------------(3)This equation is
the basis for analysis of stress at a point.
Analysis of Stress at a Point
Let kTjTiT zyxn --------------------------------------(4)
Tx, Ty, Tz :Components of n along (x,y,z)
Substituting for x , y & z in Eq.(3) in terms of xzxyx ,,
etc and equating components we
obtain
nmlT xzxyxx
nmlT yzyxyy
nmlTzyzxzz
or in Matrix Notation
uAt
-------------------------------------------------------------(5)
Tzyx TTTt ,, A :Stress TensorSymmetric A = TA
T
nmlu ,,
1222 nmluu T
n can also be resolved into components in its own plane : Normal
and Shear Components
Normal Component of n
utn Tn . uAu T
ln222222xzyzxyzyx
mnlmnml -------------(6)
is a quadratic in (l,m,n) Since l2+m
2+n
2=1 n n
Only two of (l,m,n) are independent n
To obtain shear component we use triangle law. n
n n
nnn
-
7/29/2019 Elasticity Edited
4/30
222
n
22 n
)(1
nn n
To find the extreme values of the normal stress on a plane
ln222),,( 222xzyzxyzyx
mnlmnmlnmlF
Where 01222 nml
i.e f (l, m, n) = 0
Problem : Find the extrememum value of F(l, m, n) subject to
constraint f(l, m, n) = 0
This is the problem of Constrained Extremisation
Lagrange Multiplier Method.
The solution of problem of extremizing 0),,( 321 F
Subject to: 0),( 3,21 f
Coincides with the problem of extremizing fFG ),,( ,321
With respect to and321 ,,
Present case ),,(),,( nmlfnmlFG to be extremised :
G
n
G
m
G
l
G;0;0;0
nmlll
Gxzxyx
20 --------------------------(a)
nmlm
Gyzyxy
)(20 -------------------------(b)
nmln
Gzyzxz
)(20
-------------------------(c)
0
G 1222 nml
Rearranging equations (a) to (c)
0)( uIA
----------------------------------------------------------------------(7)
Equation (7) uAu
Recall uATTTt Tzyx ,, i.e lTx , mTy , nTz
or n
T
m
T
l
T zyx
-
7/29/2019 Elasticity Edited
5/30
Also kTjTiT zyxn and nknjmiln )( --------(8)
For direction which maximizes n
Equation (8) shows that the extremum value of n has component in
the normal directions only.That is the shear component is zero.
The directions in which the stress vector reaches extreme value
are called principal directions.The corresponding stress vector has
normal component only. These normal stresses are referredto as
principal stresses.
The principal stress values and the corresponding principal
directions are contained in thesolution of equation (9)
0)( uIA
Solution exists only if
Det 0 IA
Expanding 0322
1
3 III
zyxI 1
zyz
yzy
zxz
xzx
yxy
xyxI
2
zyzxz
yzyxy
xzxyx
AI
3
I1, I2 and I3 are stress invariants 3,2,1 are principal
stresses
From theory of equations
1321 I
2133221 I
3321 I
Corresponding to 1
0)( 11 uIA
11111 ,, nnmlu TT
1n , The Eigen vectors, is the principal stress direction
corresponding to 1 .Similarly
0)( 22 uIA
22222 ,, nnmlu T
0)( 33 uIA
-
7/29/2019 Elasticity Edited
6/30
33333 ,, nnmlu T Properties of Eigen Vectors
1 Since Det 0)( IA , Eigen Vectors are determined as direction
ratos. i.e.
magnitude is indeterminate.
2 Eigen Vectors are orthogonal
031
23
1
12
1
1 uuuuuu
Example Problem
529
2162
925
zyzxz
yzyxy
xzxyx
A
I1= 5+ 16+ 5 = 26
52
216
59
95
162
25
2
I
= 76+ (-56)+ (76) = 96
864
529
2162
925
3
I
Characteristic Equation
08649626 23
0)4)(18)(12(
121 ; 182 ; 43 Check:
1321 26 I
2133221 96 I
3321 864 I
And 0
729
242
927
)(
1
1
1
11
n
m
l
uIA
111 nml and 12
1
2
1
2
1 nml
111 nml =3
1 take +ve sign
T
u
3
1
3
1
3
1
-
7/29/2019 Elasticity Edited
7/30
kjin3
1
3
1
3
11
Similarly 0
1329
222
9213
)(
2
2
2
22
n
m
l
uIA
2222 2, lmml
12
2
2
2
2
2 nml
6
1,
6
2,
6
12u take +ve sign
kjin3
1
6
2
6
12
0
929
2202929
)(
3
3
3
33
n
ml
uIA
0, 333 mnl and
12
3
2
3
2
3 nml
kjin2
10
2
13
6
1
6
2
6
13
1
3
1
3
1* 21
kji
nn = kji18
30
18
3
= 32
10
2
1nkji
We verified 321 * nnn
-
7/29/2019 Elasticity Edited
8/30
Stress Transformation
Y
(x,y,z) : Original Coordinate System
(x1,y
1,z
1) : Rotated System
yI
( ),,
111kji
are the corresponding
x1
Unit vectors
1
j 1
i x
z1
1
k
z
We have
T
uknjmili 11111
Tuknjmilj 22221
Tuknjmilk 33331
Where )3,2,1,,,( inimili are the direction cosines defining the
rotation of the ),,( 111 zyxsystem from (x,y,z) system.
Using the Eqn (5) t=Au, The stress vector in the directions
),,(111
zyx can be expressed as
zyxx nml 1111
zyxy nml 2221
zyxz nml 3331
Now consider1
.1 ixx
tunml T
z
y
x
x 11111
AuT
1 -------------(a)
Tkji
Also knjmili 1111
= 11
1
1
u
n
m
l
kjiT
-------------------------(b)
Using (a) and (b)
-
7/29/2019 Elasticity Edited
9/30
11
1
.11 uAuiTT
xx
111 AuuT
x
Similarly
12
1
21
1
.
.
11
111
Auui
Auuj
yxy
T
xyx
etc
Let 1A Stress matrix referred ),,( 111 zyx - Axes
11111
11111
11111
1
zyx
yyx
zxyxx
zz
zyA
332313
32212
3121111
AuuAuuAuu
AuuAuuAuu
AuuAuuAuu
ATTT
TTT
TTT
Let
321
31
321
321 ;;
nnn
mmm
lll
uuuU
Then UAUA T1
--------------------------------------------------(10)The
transformation represented in equation (10) is so-called
second-order Tensor Transformation
Some Properties
1) 1UUT TUU 1
Transpose of U is its inverse i.e U is Orthogonal Matrix2) Det 1
IUUT
i.e 1UUT
12U
1U For ),,( 111 zyx Right Handed System veU
If we transform (x,y,z) to the principal directions with
3
1
2
1
1
1
;; nknjni
Then stress tensor becomes diagonal
-
7/29/2019 Elasticity Edited
10/30
3
2
1
1
00
00
00
A
To show that I1, I2, I3 are Invariants
IUUAUUDetIADet TT 1
LHS = - )(1
3
1
2
21
1
3III -----------------------------(a)
RHS= UIAUT )(
IA
UIAUT
)(
)( 322
1
3III ---------------------------------------(b)
LHS and RHS should be equal for all values of
3
1
3
2
1
2
1
1
1
II
II
II
Invariant under coordinate transformation
Invariant quantities are characteristics of second-order tensor
quantities
Extreme Values of Shear Stress
Normal stress vector : nn n n
Total stress vector Tzyxn TTTt ,, n
Shear vector nn n n
From vector triangle nnn
nnn
Problem : To find direction n for which n is an extremum
We have
222
n
22
2 n ---------------------------------------(1)
tt Tn 2
Where t = Au
)()(2
AuAu Tn
-
7/29/2019 Elasticity Edited
11/30
And AuuutTT
We transform the problem in terms of principal stresses and
principal directions
Let A* Principal Stress Tensor
n * Orientation of the plane on which is sought with respect to
principal directions.
Then
3
2
1
*
00
00
00
A
A*U* = Tnml 3.21 ,,
And )()(2
UAUA Tn
22
3
2
2
22
1
2 nmln -----------------------------------(2)
2
3
2
2
2
1
nml ------------------------------------(3)Using equation (2)
and (3) in (1)
)(),,( 232
2
2
1
22
3
22
2
22
1
2 nmlnmlnmlF -------------(4)
Problem : Extremise F(l*,m*,n*)
Subject to 01222 nml
i.e 0),,( nmlf
Using Lagrange multiplier. The above problem is identical
to:
Extremise : 0),,,( fFnmlG
W r t ,,, nml
02)2(22 12322212
1
llnmlll
G --------------------------------(5)
02)2(22 22322212
2
mmnmlmm
G --------------------------(6)
02)2(22 32322212
3
nnnmlnn
G -------------------------------(7)
10 222
nmlf
G
Equations (5)(7) are simultaneous equations for ),,( nml leading
to directions of maximum
Shear Stress.
These are Non-Linear equations. We can solve by considering
particular cases of
nml ,, -
method of exhaustion.
1.
nml ,, cannot be zero simultaneously
-
7/29/2019 Elasticity Edited
12/30
2. Two of
nml ,, are zero
Then n* = 1, This corresponds to principal plane 0
3. one of
nml ,, zero
Let n*=0 122 ml
Eliminate from (5) and (6)
0)(2)( 22212
21 l
Two cases :
(3a) :2
121
l
2
1m
This defines four planes and2
21
Normal stress on this plane 2/)( 21 2
Max Shear occurs on planes 45 deg. To 1 and 2 directions
Similarly m* = 02
1 nl
2
1313
and 1
l* = 02
1 nm
232
23
For the case n* = 0. If 21 all planes such that
122* ml are planes of maximum shear
then 0)()(22
1
2
1
222
1
mlml
Lastly we note that if 321 equations (5) to (7) are satisfied
for all values of
i.e All planes are planes of extreme shear. ( )0(
Such a state of stress is referred to as hydrostatic state of
stress. Here all planes are principal
planes.Decomposition of stress tensor into Hydrostatic and
Deviatoric components
Hydrostatic or Spherical component: All the principal stresses
are equal and all planes areprincipal planes
Pure Shear Component or Deviatoric Component: A state of pure
shear exists. If there exists
directions such that 321 = 0 in those directions. i.e only shear
stress components exist.
-
7/29/2019 Elasticity Edited
13/30
The necessary and sufficient condition for a stress tensor to
represent pure shear is :
0zzyyxx
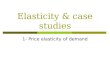
Octahedral shear Stresses
Planes equally inclined to the principle planes are called
3n
Octahedral planes )3
1,3
1,3
1(0 n )3
1,3
1,3
1(0 n
The direction cosines are measured wrt principal directions
2n
),,( 321
nnn
1n
These are eight such planes representing different sign
combination. They together form faces of
A Octahedral.
We have the following relations for octahedral planes
2) Normal stresses on octahedral planes
)(3
1332211 oct SPR
ii .
2) Shear stress component on OHP :
2
13
2
32
2
21 )()()(3
1 oct
)(3
1 23
2
2
2
1 SSSoct
(S1, S2, S3) : Principal Deviatoric Streesses
Any stress tensor can be decomposed into hydrostatic and pure
shear stress tensors
Spherical part :
S
A
)(3
1zzyyxx
S
zz
S
yy
S
xx
S
zz
S
yy
S
xx
SA
00
00
00
Deviatoric part :DA
S
ijij
D
ij AAA
)(
)(
)(
S
zzzzyzxz
yz
S
yyyyxy
xzxy
S
xxxx
DA
DS AAA SA Hydrostatic state
-
7/29/2019 Elasticity Edited
14/30
DA Pure shear state
oct is also called as vonmises stress used in Mises- Hencky
failure criterion
oct Plays important role in plasticity theory.
Equilibrium Equations
Derived from equations of motion applied to an infinitesimal
element of the body under (Dynamic)equilibrium
Let ZYX ,, : Body forces /unit mass
dydxdAdzdxdAdzdydA zyx .;.;.
Law of Motion:
1. xx maF
2. zzpzp IM
xF = Total force along X-direction
zpM = Moment of all the forces about z-axis
m = Mass of the body
ax= Acceleration in x-direction
Izp = Mass M.I about z-axis
z = Angular acceleration about z-axis
-
7/29/2019 Elasticity Edited
15/30
Applying second equation
dvdkrtermsHigherordedy
dAdy
dAyddx
dAdx
dAd zpyyxyxyxxxyxxyxy 2)(
22)(
22)(
Dividing by Dv =DxDydz and taking limit as dv 0
Lim dv 0 dvdkddzpyxxyyxxy
2)(
yxxy
yxxy
0
Stress tensor is symmetric
Applying xx maF
xzzxzzxzxyyxyyxyxxxxxx advdAdAddAdAddAdAddvX )()()()(
Using Ax =dydz etc and dividing by dv
xzxyxx a
dz
d
dy
d
dx
dx
As the elemental volume shrinks to a point in the limit we
have
x
xzxyx axzyx
y
yzyyxay
zyx
z
zyzxz azzyx
Where we have used yxxy etc
RECAP2
22 n
22
3
2
2
2
1
22
3
22
2
22
1 )( nmlnml
nml ,, : Direction cosines wrt principal directions
We showed that maximum shear stress as on
n* = 02
)( 21
m* = 02
)( 13
l* = 02
)( 32
If ,321
-
7/29/2019 Elasticity Edited
16/30
Then, greatest shear stress =2
)( 31
Normal stress on maximum shear stress plane
0n
2
)( 21 0l 2
)( 32 and 0m
2
)( 13
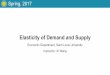
Extreme values of shear stress occur on planes each of which is
perpendicular to one of theprincipal planes (i.e one DC = 0) and
lies at 45 deg to other two.
Planes of maximum
stress
ABCD, EBFD and AFCEThese planes intersect at G which is onthe
cross diagonal OP
Maximum shear stress planes arediagonal planes of the cube.
Indeed G is the body center of the cube, the lines CG, EG and DG
being equal in length and allperpendicular to OG
Octahedral Shear Stress
With respect to principal directions
Octahedral planes equally inclined to all the principal planes
nml
-
7/29/2019 Elasticity Edited
17/30
1222 nml or 13 2 l ,3
1l
knjmilnOH
We have :
3321
oct (Mean Stress)
2
13
2
32
2
21 )()()(3
1 oct
We can also show [See Ford and Alexander,pp.44]
}666)()(){(3
1 222222zxyzxyyyzzzzyyyyxxoct
2
3
2
2
2
1 333
oct
i Principal Deviatoric Stress
11,
22 ,
33
3
)( 321
Mean stress
)(6 133221
oct
Deviatoric StressIt is some times convenient to measure the
stress wrt some False Zero and not their absolutevalues.The
reference stress is taken as hydrostatic stress or means stress
which produces only volumechange:
3)(
3
1)(
3
1 1321
Izzyyxx
Principal stress 1 :
-
7/29/2019 Elasticity Edited
18/30
1 = Mean stress +Deviation from mean
= Hydrostatic stress + Deviatoric stress
1 Prime represents D.5
)2(3
1)(
3
132132111
Similarly
)2(3
1)(
3
131232122
)2(3
1)(
3
121332133
For a general stress state:
)2(3
1zzyyxxxx
etc
zxzxyzyzxyxy ;;
Observe that :zzyyxx
0321
i are called principal Deviatoric components and represents a
state of pure shear on
octahedral planes:
octoctoct ;0
Also observe that : is the normal stress on the octahedral
plane
Mean Stress =3
)(3
1 1321
Ioct
Deviatoric stress = oct
-
7/29/2019 Elasticity Edited
19/30
2212132322212 39
2)()()(
9
1IIoct
The method of representing stresses in terms of and the
deviation from amounts to
considering the normal and shear stress on the octahedral
planes.
The Deviatoric stress satisfies the requirements of plasticity
theory:
(a) The volume of material must remain constant under plastic
deformation
(b) The hydrostatic stress component, , does not cause yielding
of the material.
(c) The hydrostatic stress component does not influence the
point at which yielding occurs.
From the above points it is clear that Deviatoric stress or
octahedral shear stress must govern theyield behavior of material
under plastic conditions.
The invariants of Deviatoric stress components are denoted
as
321 ,, JJJ
Note
zzyyxxJ 01
We can show that :
2
2
2 3 IJ
3
233
JIJ Also2
13
2
32
2
21 )()()(
2
3
2
2
2
1 333
2133221 6(6 J
Hence )3
2( 2
Joct
Failure Theories Based on Distortion Energy and OHS Stress
tU Total S.E. )(22
1133221
2
3
2
2
2
1 E
per unit volume
Volumetric S.E. = S.E. due to volume change
Governed by
)3/(2
3321
E
UV per unit volume
Now : SVt UUU
SU : S.E due to distortion
213232221 )()()(6
)1(
EUS per unit volume
In uniaxial state of stress
-
7/29/2019 Elasticity Edited
20/30
ySU 1
1(Yield stress)
032
)2(6
)1( 2y
E
D.E theory or Von-mises theory of failure postulates that
failure is deemed to have occurredwhen:
D.E. in general stress state = D.E. in uniaxial tension
From equations above
213232221 )()()(6
)1(
E= )2(
6
)1( 2y
E
213232221 )()()(2
1 y
= von : Von Mises Stress
D.E. theory is, therefore, also referred to as vonmises
theory
In a two-dimensional stress state
;03 2
21
2
2
2
1
2)( von
Octahedral Theory:
1
octoct
i.e OHS in general stress = OHS in uniaxial tension
213232221 )()()(3
1 oct
yoct 3
2
3
21
1
213232221 )()()(2
1 y
Same as von-mises theory
vonoct 3
2)1(
Deformation: Strain
We seek to express the deformation of a body under loads
Rigid body under motion No change in relative position between
particles or nochange of lengths of segments. This suggests that
change of distance between any two pointscan serve as a measure of
deformation- change of shape and size of the body.
-
7/29/2019 Elasticity Edited
21/30
Strain Deformation
1ds
dsdsE
)(
: Engineering Strain
2 2
22 )(
2
1
ds
dsds
: Lagrangian Strain
32
22 )(
2
1
ds
dsdse : Eulerean Strain
When 1E and 1e then eE
Also Ee
e
)21(2
1 2
Shearing Strain
Consider two directions initially at right angles to
eachother.
Shearing strain between two perpendicular directionsis the
change (Decrease) in the right angle.
12122
Shearing strain is measured in radians for smallstrains:
1212 sin
)2
sin( 12
1212 cos
Shearing strain between directions (-1 & 2) or (1,-2) is
12
Also 2,112
-
7/29/2019 Elasticity Edited
22/30
Strain Displacement Relations
Let
kzyxwjzyxvizyxuzyxu ),,(),,(),,(),,(
Be the deformation vector at any point (x, y, z). Then we can
show that:
ET
n where
DDDDETT
2
1)(
2
1
where: n Lagrangian strain measure on an element in the
direction ),,( nmln
Tnmln ,, E Finite Lagrangian strain tensor (Matrix) D
Displacement gradient matrix
z
w
y
w
x
w
z
v
y
v
x
v
zu
yu
xu
D
zyzxz
yzyxy
xzxyx
E
Note E is symmetric and non-linear in displacement gradientsIf
strains are small nn and we can use E
T
n
For small strain and small rotations displacement gradients are
small
Under these assumptions ETn where )(2
1DDE
T
We have set 02
1DDT (Non-Linear part) Or
z
w
y
w
z
v
x
w
z
u
y
w
z
v
y
v
x
v
y
ux
w
z
u
x
v
y
u
x
u
E
)(2
1)(
2
1
)(2
1)(
2
1
)(
2
1)(
2
1
E Trans forms as a second order tensor
-
7/29/2019 Elasticity Edited
23/30
Shearing strain between directions nn &
0. nn
2
0 T
cos
For small strains we can show that
ET
2
1
thus ET
n
ET
2
1
Interpretation of terms in E Let Tin 0,0,1
x
uE
E
xx
T
n
Similarly Tjn 0,1,0
y
vyn
Tkn 1,0,0
z
wEzzn
Diagonal terms of E are the direct strains of line elements
along x, y and z directionsConsider
Tin 0,0,1; Tjn 0,1,0;
-
7/29/2019 Elasticity Edited
24/30
Then xyxyxy EE 2
1
)(2
1
x
v
y
u
Similarly
)(2
1
2
1
)(21
21
x
w
z
u
yw
zv
xzxz
yzyz
xzyzxy ,, are tensorial shearing strain components
xzyzxy ,, are engineering shearing strain components
zyzxz
yzyxy
xzxyx
E
2
1
2
12
1
2
12
1
2
1
Strain-Displacement Relations
z
w
y
v
x
uzyx
,,
)(2
1),(),(
x
w
z
u
z
v
y
w
x
v
y
uxzyzxy
Strains are derived from pure geometricconsiderations.
Compatability Equations
Deriving strains from displacement components is simple and
straightforward. Whereas,
Obtaining displacements from integrating strains (The reverse
problem) is not simple
We have six strains and three displacement components
We need to put restrictions on xy .
i.e we cannot arbitrarily specify xy and expect to derive them
from a single-valued continuous
displacement function.
Physically deformations are single-valued and continuousNo gaps
in the deformed body.
-
7/29/2019 Elasticity Edited
25/30
The restrictions that make the strain field derivable from a
single-valued continuous displacementfield are called compatability
conditions.
There are six independent compatability equations:
yxxy
xyyyxx
2
2
2
2
2
----------------------------------------------(a)
zyyz
yzzzyy
2
2
2
2
2
----------------------------------------------(b)
zxzx
xzxxzz
2
2
2
2
2
----------------------------------------------(c)
)(22
zyxxzy
xyxzyzxx
---------------------------(d)
)(2
2
xzyyxz
yzyxzxyy
----------------------------(e)
)(22
yxzzyx
zxzyxyzz
----------------------------(f)
Compatability equations are both necessary and sufficient
conditions for existence of single-valued continuous displacement
field from which the subject strain field can be derived.
Constitutive Relations or Stress-Strain Relations
Isotropic-Elastic material
Hooks law- Stress StrainFor an elastic material
Youngs Modulus,
E
Shear Stress:G
xy
xy
Rigidity Modulus, G
ExtensionalLongitudin
nContractioLateral =Poissons ratio
)1(2
EG
-
7/29/2019 Elasticity Edited
26/30
In three-dimensions
)(EEE
zzyyxx
xx
G
xy
xy
)(EEE
zzxxyy
yy
G
zy
yz
)(EEE
yyxxzzzz
G
zxzx
xz
yz
xy
zz
yy
xx
zx
yz
xy
zz
yy
xx
E
E
E
EEE
EEE
EEE
)1(200000
)1(20000
00)1(
2000
0001
0001
0001
C C : Compliance MatrixThree elastic constants two are
independent
-
7/29/2019 Elasticity Edited
27/30
Boundary value problem in linear elasticity.
We have:
1. 6 Stress Variables/Components
2. 6 Strain Variables/Components
3. 6 Displacement Components
4. 6 Equilibrium Equations
5. 6 Strain-Stress Equations
6. 6 Strain- Displacement Equations
15 Variables
15 Equations
Well-posed problem
Auxiliary Equations
7. 6 Compatability Equations
The solutions must satisfy boundary conditions:
Stresses: Stress or Force boundary conditions
Displacements: Displacement or Kinematic B.C
It is also under stood that of explicit use of displacements are
not made, the strain distributionsspecified must also satisfy the
compatability equations.
The body forces and surface tractions must be statically
compatible.
There are three classes of Boundary Value Problems: (BVP)
1 (Determine the distribution of stresses and displacements in
the interior of the body)under a surface traction over the
boundary: BVP- First kind
2 (Determine the distribution of stresses and displacements in
the interior of the body)under a prescribed displacement
distribution over the entire boundary: BVP- Second kind
3 (Determine the distribution of stresses and displacements in
the interior of the body)under the action of a given body force
distribution with a given traction distribution overthe part of the
boundary S1 and a prescribed displacement distribution over the
remainingpart of the boundary S2. Mixed BVP.
It should be noted that where tractions)(r
T are specified, it must satisfy the equilibrium equation
Or Cauchys formula on the boundary.
332211
)(vvvT iii
v
i
kvjvivv 321
yx TTT
jTiT yx
xyxxmlT
xyyy lmT
-
7/29/2019 Elasticity Edited
28/30
Solution Approaches
BVP First kind
Consider 2-D case (Plane stress 0 yzxzz )
Equilibrium equations.
0
Xyxxyx -------------------------(1a)
0
Y
yx
yxy ---------------------------(1b)
Strain-Stress
xy
xy
xy
xy
y
yx
x
EG
EE
EE
)1(2
---------------------(2)
Compatability Equations
yxxy
xyyx
2
2
2
2
2
--------------------------(3)
Using (2) in (3)
yxxy
xy
xyyx
2
2
2
2
2 )1(2)()( ---------------------(4)
Compatability equations in terms of stress Components:
Let
yx
x
y
xy
y
x
2
2
2
2
2
--------------------------------------------------------------------------(5)
),( yx
is called Airys Stress Function
The stress components assumed in this form satisfy the
equilibrium equations permanently.
We must choose to satisfy the compatability equation (4)
above
Using equations (5) in (4)
-
7/29/2019 Elasticity Edited
29/30
22
4
22
4
22
4
2
2
2
2
2
2
2
2 )1(2)()()(
yxyxyxxxyy
or
0222
4
4
4
4
4
yxyx
--------------------------------------------------------------(6)
0;0 224
)(2
2
2
22
yx
Laplacian or Harmonic operator
04 Bi-Harmonic Equation
We have reduced number of differential equations. But, the order
of differential equations hasincreased.
BVP of Second kind
Express equilibrium in terms of displacements.
C Strain in terms of stress
------------------------------------------(7)Or
D Stress in terms of
strains------------------------------------------(8) 1 CD C =
Compliance Matrix
D = Stiffness Matrix
2)1(00
01
01
)1(2
ED ---------------------------------------------------(9)
xyxyxy
yxy
yxx
EE
E
E
2
)1(
)1()1(2
)1(
)1(
2
2
2
-------------------------(10)
Substitute Strain- Displacement Relations
)()1(2
)()1(
)()1(
2
2
x
v
y
uE
y
v
x
uE
y
v
x
uE
xy
y
x
---------------------------------------------------------(11)
-
7/29/2019 Elasticity Edited
30/30
Substituting in equilibrium equations
0
)1(22
)1(
)1(
0
2
2
2
2
2
2
X
yx
vE
y
u
x
uE
Xyx
xyx
-------------------(12)
Similarly:
0)1(22
)1(
)1(
0
2
2
2
2
2
2
Yyx
uE
y
v
x
vE
Yxy
xyy
--------------------(13)
If single valued displacements field satisfying kinematics
boundary conditions can be foundsatisfying equations (12) and (13),
then exact solution would have been found. The stress fieldderived
from such a field should also satisfy the stress B.C.
Uniqueness Theorem
If, an addition to the body forces, either the surface
displacements or surface tractions arespecified, there exists only
one from of stress and strain distributions in the body.
Applies to:
*Linear Elasticity Equations.
*Small displacements and small displacement gradients.