Embed Size (px)
Citation preview

Nakagawa, K., Matsumura, R., and Shiomi, M.
Paper:
Effect of Robot’s Play-Biting in Non-Verbal CommunicationKayako Nakagawa∗,∗∗, Reo Matsumura∗,∗∗, and Masahiro Shiomi∗∗
∗Karakuri Products Inc.2-1-1 Nihonbashi-hongokucho, Chuo-ku, Tokyo 103-0021, Japan
E-mail: {nakagawa, reo}@krkrpro.com∗∗Advanced Telecommunications Research Institute International (ATR)
2-2-2 Hikaridai, Keihanna Science City, Kyoto 619-0288, JapanE-mail: [email protected]
[Received August 20, 2019; accepted November 29, 2019]
This paper focuses on “play-biting” as a touch com-munication method used by robots. We investigatedan appropriate play-biting behavior and its effect oninteraction. The touching action has positive effectsin human-robot interactions. However, as biting is adefenseless act, it may cause a negative effect as well.Therefore, we first examine biting manner and the ap-pearance of the robot using a virtual play-biting sys-tem in Experiment 1. Next, based on the result of ex-periment, the play-biting system is implemented in astuffed animal robot. We verified the impressions cre-ated by the robot and its effect on mitigating stress inExperiment 2. Consequently, the play-biting commu-nication gave positive and lively impression, and effectof reducing the physiological index of stress, in com-parison to only touching the robot.
Keywords: human-robot interaction, play-biting, touch,therapy, stress
1. Introduction
Physical touch is sometimes more powerful than words.It is imaginable that, when feeling tired or disgusted atwork or feeling depressed by an uncomfortable situation,the presence and physical snuggling of a partner or petwithout any words has a healing effect. It is known thatin communication between people, touching psychologi-cally or physiologically has a positive effect [1–3]. Also,in human-robot interaction, it is reported that touching therobot increases motivation [4, 5], and reduces stress [6].Further, in the real environment, it is proved that thetouching of a robot has effects on treating depression andproblematic behavior [7].
Therefore, in this paper, we focus on “play-biting” as aclose touching behavior that is expected to have a thera-peutic effect. Play-biting is often seen in animal pets thatdo not have language and infants who have not yet mas-tered verbal communication. A bite displays various emo-tions, such as spoiling, trust, and irritation by the action,and builds up an intimate relationship. Such high-intimate
Fig. 1. Play-biting communication with the robot.
touching can be considered to have a stronger influence onthe state of mind and relationships.
On the other hand, such touch interactions with infantsand pets are limited in environment and position. It ishard to provide such communication in an arbitrary sceneand in hygienic and ethical viewpoints. Also, as bitingis a fairly intimate act, there is high possibility that anunpleasant impression can be given or the attributes of thesubject being bitten can be influenced.
Therefore, this research aims at developing a “play-biting” robot as a medium for touch communication(Fig. 1). First, in order to examine proper biting mannerand appearance, we conducted an experiment using vir-tual agents and a biting device. It is not easy to change theappearance of the real robot, that is, there are high coststo assessing whether the appearance is proper through ex-periments that use actual equipment. Therefore, in thisstudy, using a virtual agent, we attempted an examinationbefore actual hardware production. Then, based on the re-sults, we developed a play-biting robot, and investigatedthe effect of the play-biting on the impression of the robotand on the stress reduction.
86 Journal of Robotics and Mechatronics Vol.32 No.1, 2020
https://doi.org/10.20965/jrm.2020.p0086
© Fuji Technology Press Ltd. Creative Commons CC BY-ND: This is an Open Access article distributed under the terms of the Creative Commons Attribution-NoDerivatives 4.0 International License (http://creativecommons.org/licenses/by-nd/4.0/).
Effect of Robot’s Play-Biting in Non-Verbal Communication
2. Related Research
There are many studies on the effects of human touch-ing. If light touching is made in request behavior, therequest can be easily accepted [1, 2]. Even in the fieldof nursing, it is obvious that touching improves patients’emotions, behaviors, and physiological responses [3]. Inaddition, the relationship between feelings and how to betouched, such as touching speed and touched part of body,is reported [8].
For touching between human and a machine, touch-ing between hands, such as in a handshake, has beenfeatured in many studies that use such modes of touchas a model [9, 10]. There is research on the trajectoryand speed at which a robot arm approaches the hand inhandshake research on motion models [11], and researchof emotional expression through tactile interface, suchas joystick [12]. The act of shaking hands is a premisethat there is non-hostile communication with an unfamil-iar partner, and the touching parts are equal to each other.The behavior of biting can also be interpreted as hostile,and hence a bitten side endangers him/herself. Therefore,biting method requires careful consideration when we usebiting behavior as a communication method.
Recently, lots of research regarding touch in human-robot interaction are being conducted. Depending on arobot’s touch sensation, it has been reported that there arechanges in the impressions of personality [13]. By be-ing touched by the robot, motivation is increased [4, 5]and unfairness is alleviated [14]. It is reported that, hug-ging or the experience of being hugged by robots reducestress [15, 16]. However, negative impressions are also re-ported; a robot’s touch can impact its reliability [17, 18].Therefore, negative impressions may occur depending onthe situation.
Further, as a therapy robot, many soft robots wherebytouching is emphasized have been developed [7, 19]. Itis reported that a real robot has higher effect in reducingstress than a virtual robot [20]. It is also reported, despitethe same appearance, that a soft exterior has a higher ef-fect in reducing stress than a hard exterior [21].
As mentioned above, much research on human-robottouching has been conducted. However, there is also thevery intimate act of play-biting. At the same time, in or-der to incorporate an act that can potentially give negativeimpressions, such as danger and disgust, to the robot, it isnecessary to examine the impressions given by biting asa touching method, and to assess the influence on impres-sions by the biting manner and appearance.
3. Virtual Play-Biting System
In this study, we developed a play-biting system usingvirtual agents and a biting device, to collect data and in-vestigate an appropriate play-biting behavior in the exper-iment.
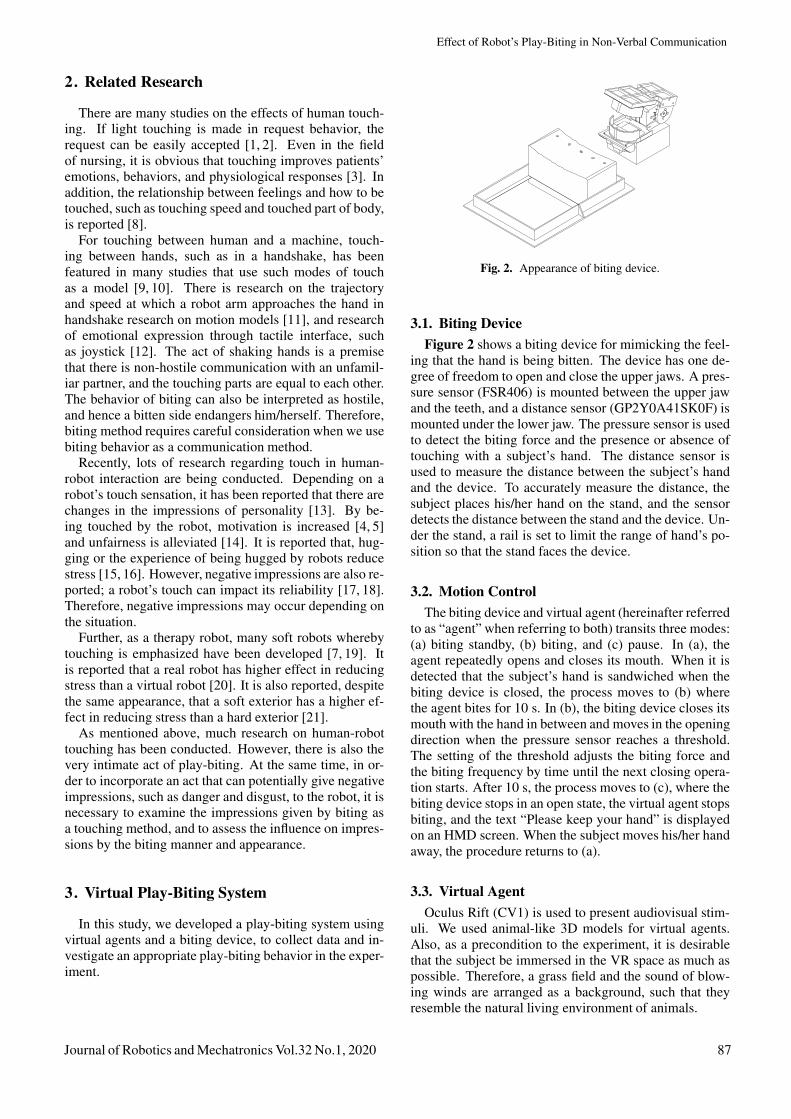
Fig. 2. Appearance of biting device.
3.1. Biting DeviceFigure 2 shows a biting device for mimicking the feel-
ing that the hand is being bitten. The device has one de-gree of freedom to open and close the upper jaws. A pres-sure sensor (FSR406) is mounted between the upper jawand the teeth, and a distance sensor (GP2Y0A41SK0F) ismounted under the lower jaw. The pressure sensor is usedto detect the biting force and the presence or absence oftouching with a subject’s hand. The distance sensor isused to measure the distance between the subject’s handand the device. To accurately measure the distance, thesubject places his/her hand on the stand, and the sensordetects the distance between the stand and the device. Un-der the stand, a rail is set to limit the range of hand’s po-sition so that the stand faces the device.
3.2. Motion ControlThe biting device and virtual agent (hereinafter referred
to as “agent” when referring to both) transits three modes:(a) biting standby, (b) biting, and (c) pause. In (a), theagent repeatedly opens and closes its mouth. When it isdetected that the subject’s hand is sandwiched when thebiting device is closed, the process moves to (b) wherethe agent bites for 10 s. In (b), the biting device closes itsmouth with the hand in between and moves in the openingdirection when the pressure sensor reaches a threshold.The setting of the threshold adjusts the biting force andthe biting frequency by time until the next closing opera-tion starts. After 10 s, the process moves to (c), where thebiting device stops in an open state, the virtual agent stopsbiting, and the text “Please keep your hand” is displayedon an HMD screen. When the subject moves his/her handaway, the procedure returns to (a).
3.3. Virtual AgentOculus Rift (CV1) is used to present audiovisual stim-
uli. We used animal-like 3D models for virtual agents.Also, as a precondition to the experiment, it is desirablethat the subject be immersed in the VR space as much aspossible. Therefore, a grass field and the sound of blow-ing winds are arranged as a background, such that theyresemble the natural living environment of animals.
Journal of Robotics and Mechatronics Vol.32 No.1, 2020 87

Nakagawa, K., Matsumura, R., and Shiomi, M.
(a) Tiger (b) Cat
Fig. 3. Biting agent.
Two types of animals (cats and tigers) are prepared asagents. Fig. 3 shows their appearances. The reason forthe selection will be described later. From the Unity As-set Store, TS-TIME “Cu Cat” and ROBIN SCHMIDT“Animals-Tiger” are used as 3D models for the cat andtiger, respectively. For each agent, there are three patternsof animation: (a) in the biting standby mode, the mouth isopened and closed wide, facing forward, (b) in the bitingmode, the biting faces forward and down, and (c) in thepause mode, a standby animation is used.
4. Experiment 1
In order to achieve proper play-biting by the robot usingthe biting device in the previous section in Experiment 1,we examine proper biting manners and appearance usingthe virtual agent. The act of biting can give positive im-pressions, such as a favor and desire to play, e.g., play-biting. On the other hand, there is a high possibility thatthe act of biting may cause negative impressions, such asan intimidating or threatening action. In addition, it is ob-served that the appearance and the way of biting influencethese impressions. Therefore, in this experiment, in or-der to determine the appearance and biting manner of theplay-biting robot, we search for a combination of bitingmanner and appearance that can be regarded as a positiveemotional state.
4.1. Experiment ConditionIn this experiment, the following conditions are set.
• Appearance of biting agent: Cat/Tiger
• Biting frequency: High/Low
• Biting force: Weak/Strong
As a case where the biting act is not play-biting, it maybe regarded as an attack that gives a negative impression.
Fig. 4. Experiment state.
For example, there may be a reason that the bite is per-ceived hard, although it seems gentle. On the contrary,there may be a reason that “it bit gently though it seemedto bite violently” as a case in which a positive impressionis captured. Therefore, in order to express intense andgentle biting, biting force and frequency are set as the twobiting parameters.
The time interval for the “high” and “low” bitingfrequencies are set as 0.1 and 1.1 s, respectively. In“weak” and “strong” settings of the biting force, mini-mum/maximum sensor thresholds are set within a rangethat can be controlled by the experimental hardware. Re-garding the biting force, the load calculated from a sensorvalue attached to the biting device does not necessarilymatch the load on the bitten hand. Therefore, we mea-sured the load under each condition using another pres-sure sensor (13 mm in diameter) attached to the finger-tip. For the peak load value under each condition, themeasurement is performed 40 times. The average valuefor “weak” is 89.8 gf (SD: 11.9), while for “strong” is195.1 gf (SD: 15.3).
The reason for selecting the appearance of the agent in-volves the fact that play-biting can be used as a means ofcommunication. That is, the agent that cannot speak lan-guage and does not use facial expression is appropriate.Therefore, animals with no facial muscles are selected.In addition, to create the perception that the animals thatseemed to “bite gently” or “bite hard,” the former is set asa cat and the latter as a tiger.
4.2. Experiment ProcedureBefore the experiment, the experimenter explains to the
subjects the content of the experiment, and the subjectssigned the consent form for participating in the experi-ment. The subject is also explained that there is no risk ofinjury due to weak motor power and that the experimentcan be easily cancelled if the subject requests. The ethicscommittee at the Advanced Telecommunication ResearchInstitute approved the methodology of the paper.
Figure 4 shows a state of the experiment. The subjectfixes his/her left hand, wearing a work glove, to the stand
88 Journal of Robotics and Mechatronics Vol.32 No.1, 2020
Effect of Robot’s Play-Biting in Non-Verbal Communication
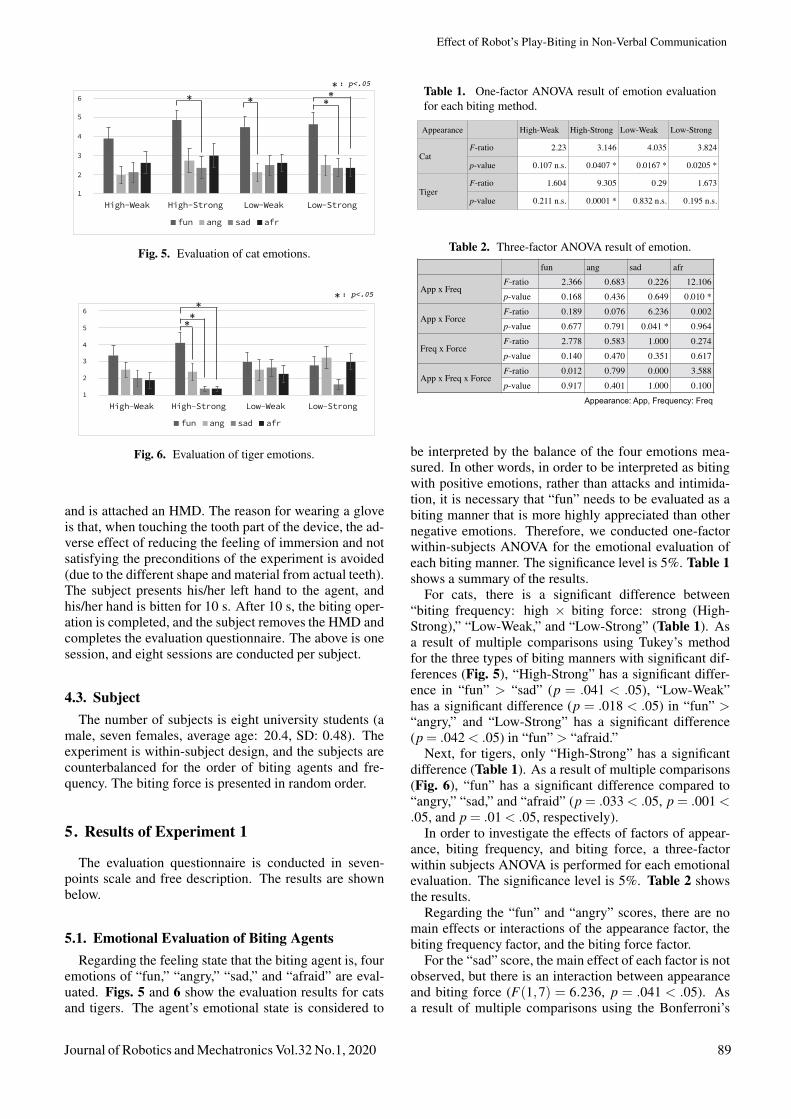
Fig. 5. Evaluation of cat emotions.
Fig. 6. Evaluation of tiger emotions.
and is attached an HMD. The reason for wearing a gloveis that, when touching the tooth part of the device, the ad-verse effect of reducing the feeling of immersion and notsatisfying the preconditions of the experiment is avoided(due to the different shape and material from actual teeth).The subject presents his/her left hand to the agent, andhis/her hand is bitten for 10 s. After 10 s, the biting oper-ation is completed, and the subject removes the HMD andcompletes the evaluation questionnaire. The above is onesession, and eight sessions are conducted per subject.
4.3. SubjectThe number of subjects is eight university students (a
male, seven females, average age: 20.4, SD: 0.48). Theexperiment is within-subject design, and the subjects arecounterbalanced for the order of biting agents and fre-quency. The biting force is presented in random order.
5. Results of Experiment 1
The evaluation questionnaire is conducted in seven-points scale and free description. The results are shownbelow.
5.1. Emotional Evaluation of Biting AgentsRegarding the feeling state that the biting agent is, four
emotions of “fun,” “angry,” “sad,” and “afraid” are eval-uated. Figs. 5 and 6 show the evaluation results for catsand tigers. The agent’s emotional state is considered to
Table 1. One-factor ANOVA result of emotion evaluationfor each biting method.
Table 2. Three-factor ANOVA result of emotion.
be interpreted by the balance of the four emotions mea-sured. In other words, in order to be interpreted as bitingwith positive emotions, rather than attacks and intimida-tion, it is necessary that “fun” needs to be evaluated as abiting manner that is more highly appreciated than othernegative emotions. Therefore, we conducted one-factorwithin-subjects ANOVA for the emotional evaluation ofeach biting manner. The significance level is 5%. Table 1shows a summary of the results.
For cats, there is a significant difference between“biting frequency: high × biting force: strong (High-Strong),” “Low-Weak,” and “Low-Strong” (Table 1). Asa result of multiple comparisons using Tukey’s methodfor the three types of biting manners with significant dif-ferences (Fig. 5), “High-Strong” has a significant differ-ence in “fun” > “sad” (p = .041 < .05), “Low-Weak”has a significant difference (p = .018 < .05) in “fun” >“angry,” and “Low-Strong” has a significant difference(p = .042 < .05) in “fun” > “afraid.”
Next, for tigers, only “High-Strong” has a significantdifference (Table 1). As a result of multiple comparisons(Fig. 6), “fun” has a significant difference compared to“angry,” “sad,” and “afraid” (p = .033 < .05, p = .001 <.05, and p = .01 < .05, respectively).
In order to investigate the effects of factors of appear-ance, biting frequency, and biting force, a three-factorwithin subjects ANOVA is performed for each emotionalevaluation. The significance level is 5%. Table 2 showsthe results.
Regarding the “fun” and “angry” scores, there are nomain effects or interactions of the appearance factor, thebiting frequency factor, and the biting force factor.
For the “sad” score, the main effect of each factor is notobserved, but there is an interaction between appearanceand biting force (F(1,7) = 6.236, p = .041 < .05). Asa result of multiple comparisons using the Bonferroni’s
Journal of Robotics and Mechatronics Vol.32 No.1, 2020 89

Nakagawa, K., Matsumura, R., and Shiomi, M.
Fig. 7. Multiple comparison results of tiger emotions.
Fig. 8. Multiple comparison results of evaluating biting comfort.
method, there is a significant difference in biting forcebetween “strong” and “weak” (p = .041 < .05) (left inFig. 7). In other words, tigers have higher scores for “sad”when the biting force is weak.
Also, for the “afraid” score, the main effect of each fac-tor is not seen, but there is an interaction between appear-ance and biting frequency (F(1,7) = 12.106, p = .010 <.05). As a result of multiple comparisons, when the ap-pearance is a tiger, there is a significant difference in bit-ing frequency “high” < “low” (p = .046 < .05) (rightin Fig. 7). In other words, tigers have a higher score of“afraid” when the biting frequency is lower.
5.2. Evaluation of Bitten SensationWith respect to the senses of being bitten, items “com-
fort,” “fear,” “pain,” “force,” and “consistency betweenbiting manner and appearance” are evaluated. For eachitem, a three-factor within-subjects ANOVA is performed.
Figure 8 shows the results of “comfort.” There isan interaction between appearance and biting frequency(F(1,7) = 5.895, p = .046 < .05). As a result of mul-tiple comparisons, when biting frequency is low, there isa significant difference in tigers < cats (p = .040 < .05),and when appearance is tiger, there is a significant dif-ference in low biting frequency < high biting frequency(p = .008 < .05).
As for “force,” the main effect is seen as weak < strong(F(1,7) = 9.88, p = .016 < .05). This means that the dif-ference of force setting is reflected in the senses. In addi-tion, Fig. 9 shows the results of whether the biting man-ner is appropriate for the appearance. The main effect ofthe appearance is seen in tigers < cats (F(1,7) = 21.966,
Fig. 9. Consistency evaluation between biting method andappearance.
p = .002 < .05). In other words, it is considered that thereis a deviation in the presented biting method from the tigerbiting method imagined by the subject.
5.3. Evaluation of Play-Biting ExperienceA subject evaluates whether he/she wants to experience
a cat or tiger bite for the second time and freely describesthe reason. Of eight subjects, three subjects provided ahigh evaluation for the tiger and five a high evaluation forthe cat.
Reasons for highly evaluating the tiger;
• The tiger seems to kindly bite me, which is differ-ent from its appearance. On the other hand, the catseems to strongly bite me, which is different from itsappearance.
Reasons for highly evaluating the cat;
• There is a slight gap between vision and experiencebecause the biting force of the tiger seems to be muchstronger. The cat has a pretty appearance and actu-ally bites the subject with a force that corresponds toits appearance.
• There is an inconsistency between the image of thetiger and the biting manner of the tiger. Therefore,the tiger cannot be understood, but the cat can beunderstood.
In an oral interview, the subjects who actually has a catas a pet said, “I remember this behavior because I actuallyplay in this way with my cat,” and “Since my cat is notdomestic, I hope that I can play like this.”
6. Design of the Stuffed-Toy Type Play-BitingRobot
6.1. Observation of AppearanceThe results of Experiment 1 show that when the bit-
ing agent is a tiger, there are effects of having less fun,and negative emotional expressions are captured depend-ing on the biting manner. In addition, the tiger is given alow evaluation with respect to the consistency between the
90 Journal of Robotics and Mechatronics Vol.32 No.1, 2020

Effect of Robot’s Play-Biting in Non-Verbal Communication
biting manner and appearance. Therefore, the gap that astrong animal performs play-biting differently comparedto its appearance is considered a negative impression.However, the cat has a small gap between appearance andplay-biting action, and it is highly possible that the cat’sbiting is accepted as play-biting. From the comments ofthe subjects, it is suggested that play-biting agent is betterto have the appearance which leads the impression thathe/she likely to play-bite, or which reminds memory ofpast play-biting users have experienced.
The experiment is conducted for the purpose of refer-ring to the design of the real robot. However, the resultsobtained with the virtual agent are not always applicableto the robot as they are. There are lots of research com-paring robots with virtual agents [22]. It has been clar-ified that robots are more acceptable than virtual agentsfor advice on real environments [23]. There is a reportthat the robot gives a more reliable and acceptable impres-sion than the virtual agent [24]. On the other hand, thereis a report that virtual agents receive higher acclaim forpersuasive conversations [25]. Since play-biting behaviorinvolves not only vision but also physical stimulation, arobot with physical presence is more likely to present acomfortable sensation.
As for the details of the appearance, the biting agentused in Experiment 1 has a realistic appearance that issimilar to that of a real animal. However, costs are highto create a cat with an appearance similar to the currentlyused virtual agent as for the real play-biting robot. Even ifpossible, the appearance probably cause the uncanny val-ley problem [26]. Therefore, the results of Experiment 1inform guidelines, in that a negative effect of the bitingbehavior can be suppressed by reducing the gap betweenthe biting manner, and selecting an agent that likely toact play-biting. In order to provide a “play-biting” expe-rience that builds a positive relationship, it is consideredthat a design based on these guidelines is necessary.
6.2. Discussions on “How to Bite”With respect to biting manner, the results of Experi-
ment 1 show that for both cats and tigers, in the combina-tion of “biting frequency: high” × “biting force: strong”(High-Strong), the average evaluation of “fun” is higherthan that of other emotions, and there are significant dif-ferences between several emotions. As for the bitingforce, it is suggested that when the appearance is a tiger,a negative impression exists where “weak” is “sad,” and“low” is “afraid” and “uncomfortable.” Based on theseresults, regarding the biting method, the combination of“biting frequency: high” × “biting force: strong” (High-Strong) is considered to be the least likely to produce anegative impression.
In the experiment, in terms of safety and ethical consid-erations with adopting a biting device with motor torquethat does not cause the subject to feel danger, it is appar-ent that the biting force must be weaker than the bitingforce assumed from the appearance of the tiger. In thecase where a subject feels that he/she is “bitten gently but
Fig. 10. Appearance of the play-biting robot using cat-typepuppet.
seemed to be bitten violently,” the impression can be im-proved, but the experiment results indicate that this caseworks as a negative effect. If the biting force is stronger,there is a possibility that it will be evaluated as a good im-pression, even if it has the appearance of the tiger. How-ever, when the biting action is implemented in a therapeu-tic robot, it is unrealistic to set the biting force to a levelthat makes the user feel in danger. Therefore, the appear-ance of animals that have a large gap in the biting forceexpected versus adopted is considered to be inappropriatefor play-biting intended for therapeutic purposes.
6.3. Play-Biting RobotBased on the results and considerations in Experi-
ment 1, we implemented play-biting motions in an actualrobot. Fig. 10 shows the appearance. Results of Exper-iment 1 offered guidelines of the biting manner and ap-pearance, that it is better to reduce the gap between the bit-ing manner and appearance, and to select an agent whichis likely to play-bite. Therefore, to match the biting deviceused in Experiment 1, we used a cat puppet of which play-biting can be easily imagined, and which is commerciallyavailable in the same size as the cat in Experiment 1. Onthe other hand, the reality and shape of the appearance aredifferent from those used in Experiment 1. Therefore, itis necessary to consider that the experimental results areaccordingly reflected. In Experiment 2, a questionnaireis used to evaluate the appropriateness of the appearance.The questionnaire items will be described later.
The robot transits two modes: (a) biting standby and(b) biting. In (a), the robot repeatedly opens and closes itsmouth. When the pressure sensor detects that the user’shand is sandwiched when the bite device is closed, theprocess moves to (b) where the robot performs the bitingmotion for 3 s. The setting of the biting force and thebiting frequency is the same as that of the virtual play-biting system. Based on the results of Experiment 1, thebiting force is strong and the biting frequency is high. If3 s have passed and a user keeps his/her hand in the mouthof the robot, (b) is repeated. If the user releases the hand,the process shifts to (a).
Journal of Robotics and Mechatronics Vol.32 No.1, 2020 91

Nakagawa, K., Matsumura, R., and Shiomi, M.
7. Experiment 2
The purpose of this paper is to develop a robot that per-forms proper play-biting. In Experiment 1, which is thepreparation for producing a play-biting robot, we investi-gated appropriate biting and appearance. For this specificpurpose, an impression evaluation experiment was con-ducted using a virtual agent. In Experiment 2, based onthe results of Experiment 1, we implemented real bitingbehaviors in a real robot, and investigated effects on theimpression of the robot and the stress state of the user.
7.1. HypothesisIn Experiment 2, the following hypotheses are verified.
Hypothesis 1: play-biting with the robot has higherpreference and higher lifelikeness than in the case ofonly touching the robot.
Hypothesis 2: play-biting with the robot reducesstress more than only touch with the robot.
7.2. Experimental ConditionsIn the experiment, stress is measured before and after
the interaction in order to investigate the effect that theinteraction with the robot has on the stress. Therefore, theexperiment consists of the following two factors:
• Biting motion factor
- N (No-bite) condition: the robot opens and closesits mouth, but does not complete the biting action.
- B (Bite) condition: the robot opens and closes itsmouth and performs the biting action when thesubject puts his/her hand into its mouth.
• Before/after factors
- Before condition: before interaction with the robot
- After condition: after interaction with the robot
However, the evaluation items other than stress aremeasured only after the interaction, and therefore thereis only a biting action factor.
Under the N condition, the subject is instructed tofreely touch any part, except for the mouth of the robot.Under the B condition, the robot is instructed to bite thehand when the hand is placed in the mouth, and an in-struction is given to subjects to freely touch the robot.
7.3. Evaluation of the Impression of the RobotTo evaluate an impression of the robot, the “GodSpeed
Questionnaire” [27] proposed by Bartneck et al. is used.The method has indexes of “anthropomorphism,” “ani-macy,” “likeability,” “perceived intelligence,” and “per-ceived safety,” and evaluates the questions that composeeach index by a five-point scale. In the experiment, therobot appears to be an animal that does not perform in-telligent behavior, such as utterance. Therefore, the three
indexes “animacy,” “likeability,” and “perceived safety”are measured, excluding “anthropomorphism” and “per-ceived intelligence.”
The appearance and biting manner of the robot used inthe experiment are designed based on the results of Exper-iment 1. However, the appearance is not the same, and therobot is changed from the virtual agent to the real body.Therefore, there is the possibility of it becoming a nega-tive impression. Therefore, in order to confirm whetherplay-biting does not give a negative impression, “com-fort” and “afraid” are evaluated by a five-point scale.
7.4. Evaluation of Stress7.4.1. Subjective Evaluation by the Questionnaire
The Temporary Mood Scale (TMS) [28] is used to com-pose a subjective assessment of the stress state. As apsychological test to measure mood and emotion, thereis POMS (Profile of Mood States) for measuring moodand emotion from six scales of “tension,” “depression,”“anger,” “confusion,” “fatigue,” and “vigor.” Based on thePOMS, the TMS is created to measure short-term changesin moods. The TMS has six scales same as the POMS andevaluates three items for each state by a five-point scale.
7.4.2. Evaluation by Physiological IndexHeart rate variability (HRV) is a physiological index
that measures stress. HRV is the fluctuations of the heartrate waveform peak intervals (RR interval: RRI). A low-frequency component (LF: 0.05–0.15 Hz) reflects sym-pathetic and parasympathetic nerve activity, and a high-frequency component (HF: 0.15–0.4 Hz) reflects sympa-thetic nerve activity [29]. For this reason, the LF/HF ob-tained by the frequency analysis of RRI and the calcula-tions of the power spectral density of LF and HF are usedas the stress index. As the RRI obtained from the electro-cardiogram and pulse interval have almost the same value,in the experiment, RRI is calculated from the pulse, asit is easier to measure, and analyzed. The sensor usedfor the measurement is a light reflection-type pulse sensor(SparkFun SEN-11574), which is worn on the fingertip ofthe subject.
7.5. Experimental ProcedureFigure 11 shows the experimental state. From the start
to the end of the experiment, the subject performs the ex-periment with the pulse sensor on their fingertips. Whenrecording the pulse, the subject is instructed to place thehand lightly on a desk while sitting on a chair. Be-fore the interaction of each condition, a calculation taskof 2 min (30 s × 4 questions) is performed to load thestress. The calculation task is to add a one-digit numberas much as possible within the time limit. After the calcu-lation task, the subject fills out a TMS questionnaire pa-per and records his/her pulse for 3 min. After which, thesubject interacts with the robot under each condition for2 min. The interaction is performed in a state where thesubject places the robot on the knee and holds the robot
92 Journal of Robotics and Mechatronics Vol.32 No.1, 2020

Effect of Robot’s Play-Biting in Non-Verbal Communication
Fig. 11. State of Experiment 2.
lightly with his/her hand. After the interaction, the TMSquestionnaire paper is filled out again and the pulses arerecorded for 3 min. With the above-mentioned procedure,the interaction is performed to the subject under the N andB conditions. After completing both conditions, the sub-ject completes the final questionnaire.
7.6. SubjectTwenty students are selected as subjects for the exper-
iment (ten males, ten females, average age: 20.2, SD:1.5). The experiment is within-subject design and the or-der of the N and B conditions and gender distribution wascounterbalanced.
8. Results of Experiment 2
8.1. Impressions of BitingAt the end of the experiment, the subjects evaluate the
“comfort” and “afraid” feelings of the bite with a five-point scale (score range: 1–5). The average for “comfort”is 4.40 (SD: 0.86), and the average for “afraid” is 1.55(SD: 0.87). Therefore, it is considered that play-bitingbehavior gives a positive impression, which is appropri-ately presented by the biting force and biting frequencyselected from the results of Experiment 1.
8.2. Impressions to RobotsRegarding impressions of the robot, three indexes of
“animacy,” “likeability,” and “perceived safety” are eval-uated with a questionnaire. Fig. 12 shows the results. Inall indexes, the average value is higher in the B conditionthan in the N condition. As a result of paired t-tests foreach item, there is a significant difference in “animacy”and “likeability” (“animacy”: t(19) = 2.36, p = .030 <.05, r = .72, “likeability”: t(19) = 4.55, p = .001 < .05,r = .48). There is no significant difference in “perceived
Fig. 12. Evaluation of impression to the robot.
Fig. 13. Stress index (LF/HF).
safety” (t(19) = 1.23, p = .23, n.s., r = .27). From theabove results, Hypothesis 1 is supported.
8.3. Physiological Effects on StressA stress index LF/HF is calculated from the pulse data
measured for 3 min at each timing. The sampling fre-quency of the pulse data is 100 Hz. RRI is re-sampledafter linear interpolation at 1 Hz, and the power spectraldensity is calculated using an autoregressive (AR) model.The necessary amount of data is at least 128 s. Amongsubjects, the pulse data for three subjects is missing (dueto equipment failure), and the sufficient amount of datafor three subjects could not be extracted. Therefore, thedata for 14 subjects are used in the analysis of the results.
Figure 13 shows the results. An increase in LF/HFcorresponds to an increase in stress, and a decrease inLF/HF corresponds to a decrease in stress. For LF/HF,a two-factor analysis of variance (N condition / B con-dition and before/after interaction) is performed. Resultsshow that there is a significant difference in the interaction(F(1,13) = 5.067, p = .042 < .05, η2
p = .280). As a re-sult of a simple main-effect test, for the “After” condition,a marginally significant difference (p = .061) is observedin the N condition > B condition. For the B condition,a marginally significant difference (p = .083) is observedin the before > after condition.
Since LF/HF is an index with large individual differ-ences, the difference between subjects before and afterinteraction may more accurately reflect the stress change.Therefore, we analyze the value obtained by subtractingthe value before the interaction from the value after theinteraction. Fig. 14 shows the results. The result of the
Journal of Robotics and Mechatronics Vol.32 No.1, 2020 93

Nakagawa, K., Matsumura, R., and Shiomi, M.
Fig. 14. Amount of change of stress index (LF/HF).
Fig. 15. Temporary mood scale (TMS).
paired t-test showed a significant difference in the N con-dition > B condition (t(13) = 2.252, p = .004 < .05,r = .530).
8.4. Subjective Assessment of StressFigure 15 shows the results of the questionnaire on
the Temporary Mood Scale (TMS) obtained in the experi-ment. A two-factor analysis of variance (ANOVA) is per-formed using the biting factor and the before/after factors.
In the “tension,” there is a significant difference in thebefore/after factors (F = 43.599, p = .001 < .05, η2
p =.696). In the biting factor (F = 1.120, p = .303, η2
p =.056) and interaction (F = 1.141, p = .299, η2
p = .057),there are not significant differences.
In the “depression,” there is a marginally significantdifference in the before/after factors (F = 3.247, p = .087,η2
p = .146). There is no significant difference in the bit-ing factor (F = .763, p = .393, η2
p = .039) and interaction(F = 0.697, p = .414, η2
p = .035).In the “anger,” there is a significant difference in the be-
fore/after factors (F = 7.122, p = .015 < .05, η2p = .273).
There is no significant difference in the biting factor (F =0.106, p = .748, η2
p = .006) and interactions (F = 0.211,p = .651, η2
p = .011).In the “confusion,” there are no significant differences
in the before/after factors (F = 2.505, p = .130, η2p =
.116), the biting factor (F = 2.845, p = .108, η2p = .130),
and interaction (F = 1.162, p = .295, η2p = .058).
In the “fatigue,” there is a significant difference in thebefore/after factors (F = 7.766, p = .012, η2
p = .290).
There is no significant differences in the biting factors(F = 0.012, p = .914, η2
p = .001), and interaction (F =0.040, p = .844, η2
p = .002).In “vigor,” in the before/after factors (F = 1.797, p =
.196, η2p = .086), the biting factor (F = 0.093, p = .764,
η2p = .005), and interactions (F = 1.613, p = .219, η2
p =.078), there are no significant differences.
From the above results, in the physiological index,stress is more significantly reduced under the B conditioncompared with the N condition, while subjective evalua-tion shows no difference between conditions. Therefore,Hypothesis 2 is partially supported.
9. Discussion
9.1. Effects of Play-Biting on an Impression of theRobot
In evaluating the impressions of the robot, the play-biting interaction gives the robot livelier and more fa-vorable feelings compared with just a touch interaction.From a written questionnaire, opinions such as “I felt asif the robot’s eyes were laughing” (under the B condition)and “I felt a little relaxed by being bitten” were obtained.As for safety, there is a higher possibility of having a senseof danger under the B condition; however, there is no dif-ference between these conditions. Therefore, the safetyperceived by the user cannot be impaired by the play-biting behavior.
9.2. Effects of Play-Biting on StressIn the subjective evaluation of stress using the ques-
tionnaire, there is a decrease in “tension,” “anger,” and“fatigue” as the effects of the before/after factors. The de-crease in stress by touching the robot is consistent with theresults of previous research. On the other hand, there is nosignificant difference between the results of before/afterthe interaction in the factor of biting motion.
Regarding physiological indices related to stress, thevalue under the B condition is significantly lower than thatunder the N condition in terms of the values of changebefore/after interaction with the robot. The decrease inLF/HF reflects the decrease in stress. Therefore, the in-teraction with the robot under the B condition, comparedto under the N condition, can lead the subject to a morerelaxed state.
The difference between the N condition and the B con-dition is the presence or absence of the play-biting ac-tion, but the difference may be due to the presence or ab-sence of an interactive reaction that seems to be a livingorganism, e.g., the robot bites the hand when the handtouches it. Therefore, a Pearson’s correlation analysis isperformed on the before/after difference of LF/HF and the“animacy” score measured by the impression evaluationfor robots. As a result, there is no correlation betweenthem (r = −0.149, t(26) = −0.771, p = 0.447). Fromthis result, it is highly possible that the act of biting is themain factor.
94 Journal of Robotics and Mechatronics Vol.32 No.1, 2020

Effect of Robot’s Play-Biting in Non-Verbal Communication
9.3. Applicability and Limitations
In terms of the effect of play-biting to reduce stress,an introduction to a robot for therapeutic purposes is con-sidered effective. On the other hand, similar effects havebeen clarified for active touching of robots, such as hug-ging, etc. Therefore, more effective human-robot interac-tions designed to reduce stress can be realized by usingdifferent types of touches corresponding to context.
The experimental results of the present study show thatthe stress suppression effect exists by both touching andplay-biting, compared to only touching. Prior researchdoes show an effect of suppressing stress by touching;however, superiority of touching with play-biting have notyet been demonstrated in research. This time, the stressreduction effect is achieved by play-biting as a touchingmethod that seems to be a negative impression. Althoughthe control effect is clarified, it is necessary to comparethe level of the effect with other touching methods in thefuture. Although research uses humanoid robots, it hasalso been reported that the naturalness and strength ofemotions felt by the conversation partners are changeddepending on characteristics (length of time, number oftouches, etc.) when the robots touch a conversation part-ner and exhibit emotions [30]. When a stuffed-toy robotused for therapeutic purposes performs play-biting, it isnecessary to change the appropriate play-biting methodaccording to its own internal state.
The small stuffed-robot used in the experiment is suit-able for robot therapy, but physical interaction with therobot cannot be established without third-party instruc-tions. Therefore, it is also necessary to consider contextsand pull-in actions that naturally establish a play-bitingaction from the robot.
10. Conclusion
In the present study, our purpose is to develop a robotthat performs “play-biting” as one of several touch com-munication methods. So, we investigated the appearanceand biting manner required for an appropriate impression.Furthermore, we clarified the influence on impressions ofthe robot in terms of the play-biting communication, aswell as the effect of reducing stress.
While play-biting can be a communication method thatcan establish an intimate relationship, it can be an un-pleasant impression because it is a closer action than thatof physical touching. Therefore, in Experiment 1, we ex-amine biting manners and the appearances using a virtualplay-biting system in order to achieve proper play-biting.Results show that if the gap between the appearance andactual biting is large, biting behavior cannot be appropri-ately recognized as play-biting and that the appearance inwhich play-biting is easily imagined is more acceptable.
Next, in Experiment 2, based on the results of Exper-iment 1, play-biting is implemented in a stuffed robot,whereby we investigated whether the play-biting commu-nication improves the robot’s impression and contributes
to the reduction of stress. As a result of comparing thecondition of only touching the robot to the condition ofbeing play-bitten by the robot, the latter is highly eval-uated in terms of preference of the robot and appreci-ated animacy. In the comparison of the physiological in-dices before/after the communication, the stress value isreduced to a greater extent under the condition of play-biting.
From the above results, we clarify the effectivenessof play-biting as a method of touch interaction with therobot. We believe that play-biting behavior is useful todesigning a robot that uses touch as a communicationmedium, such as a pet-type and a therapy robot. In the fu-ture, we will study robot mechanisms and behaviors thatenable more natural and intimate body interactions, in-cluding play-biting.
AcknowledgementsThis work was partially supported by JST CREST Grant NumberJPMJCR18A1, Japan.
References:[1] J. D. Fisher, M. Rytting, and R. Heslin, “Hands Touching Hands:
Affective and Evaluative Effects of an Interpersonal Touch,” So-ciometry, Vol.39, pp. 416-421, 1976.
[2] N. Gueguen, C. Jacob, and G. Boulbry, “The effect of touch on com-pliance with a restaurant’s employee suggestion,” Int. J. of Hospi-tality Management, Vol.26, No.4, pp. 1019-1023, 2007.
[3] S. J. Whitcher and J. Fisher, “Multidimensional reaction to thera-peutic touch in a hospital setting,” J. of Personality and Social Psy-chology, Vol.37, No.1, pp. 87-96, 1979.
[4] K. Nakagawa, M. Shiomi, K. Shinozawa, R. Matsumura, H. Ishig-uro, and N. Hagita, “Effect of Robot’s active touch on people’s mo-tivation,” Proc. of the 6th ACM/IEEE Int. Conf. on Human-RobotInteraction (HRI 2011), pp. 465-472, 2011.
[5] M. Shiomi, K. Nakagawa, K. Shinozawa, R. Matsumura, H. Ishig-uro, and N. Hagita, “Does A Robot’s Touch Encourage Human Ef-fort?,” Int. J. of Social Robotics, Vol.9, No.1, pp. 5-15, 2017.
[6] M. Shiomi and N. Hagita, “Audio-Visual Stimuli Change not OnlyRobot’s Hug Impressions but Also Its Stress-Buffering Effects,” Int.J. of Social Robotics, February 8, 2019.
[7] T. Shibata and J. F. Coughlin, “Trends of Robot Therapy with Neu-rological Therapeutic Seal Robot, PARO,” J. Robot. Mechatron.,Vol.26, No.4, pp. 418-425, 2014.
[8] S. Hauser, S. McIntyre, A. Israr, H. Olausson, and G. Gerling,“Uncovering Human-to-Human Physical Interactions that Under-lie Emotional and Affective Touch Communication,” Proc. of IEEEWorld Haptics Conf., pp. 407-412, 2019.
[9] T. Kasuga and M. Hashimoto, “Human-Robot Handshaking usingNeural Oscillators,” Proc. of the 2005 IEEE Int. Conf. on Roboticsand Automation, pp. 3802-3807, 2005.
[10] Z. Wang, E. Giannopoulos, M. Slater, and A. Peer, “Handshake:Realistic Human-Robot Interaction in Haptic Enhanced Virtual Re-ality,” Presence, Vol.20, No.4, pp. 371-392, 2011.
[11] M. Jindai, T. Watanabe, S. Shibata, and T. Yamamoto, “Develop-ment of a Handshake Robot System Based on a Handshake Ap-proaching Motion Model,” J. Robot. Mechatron., Vol.20, No.4,pp. 650-659, 2008.
[12] J. N. Bailenson, N. Yee, S. Brave, D. Merget, and D. Koslow, “Vir-tual Interpersonal Touch: Expressing and Recognizing EmotionsThrough Haptic Devices,” Human-Computer Interaction, Vol.22,No.3, pp. 325-353, 2007.
[13] Y. Yamashita, H. Ishihara, T. Ikeda, and M. Asada, “Investigation ofCausal Relationship Between Touch Sensations of Robots and Per-sonality Impressions by Path Analysis,” Int. J. of Social Robotics,Vol.11, No.1, pp. 141-150, 2019.
[14] H. Fukuda, M. Shiomi, K. Nakagawa, and K. Ueda, “‘Midas touch’in human-robot interaction: Evidence from event-related potentialsduring the ultimatum game,” Proc. of the 7th Annual ACM/IEEEInt. Conf. on Human-Robot Interaction (HRI’12), pp. 131-132,2012.
Journal of Robotics and Mechatronics Vol.32 No.1, 2020 95

Nakagawa, K., Matsumura, R., and Shiomi, M.
[15] M. Shiomi, A. Nakata, M. Kanbara, and N. Hagita, “A hug from arobot encourages prosocial behavior,” 2017 26th IEEE Int. Symp.on Robot and Human Interactive Communication (RO-MAN),pp. 418-423, 2017.
[16] H. Sumioka, A. Nakae, R. Kanai, and H. Ishiguro, “Huggable com-munication medium decreases cortisol levels,” Scientific Reports,Vol.3, 3034, 2013.
[17] H. Cramer, A. K. Amin, V. Evers, and N. Kemper, “Touched byrobots : Effects of physical contact and robot proactiveness,” Work-shop on the Reign of Catz and Dogz in CHI’09, 2009.
[18] C. J. A. M. Willemse, A. Toet, and J. B. F. van Erp, “Affective andBehavioral Responses to Robot-Initiated Social Touch: Toward Un-derstanding the Opportunities and Limitations of Physical Contactin Human-Robot Interaction,” Frontiers in ICT, Vol.4, 12, 2017.
[19] M. Kanoh, “Babyloid,” J. Robot. Mechatron., Vol.26, No.4,pp. 513-514, 2014.
[20] R. Hayashi and S. Kato, “Psychological effects of physical embod-iment in artificial pet therapy,” Artificial Life and Robotics, Vol.22,pp. 58-63, 2016.
[21] R. Hayashi and S. Kato, “Importance of Soft Tactility on Robot-Assisted Therapy,” J. of Japan Society of Kansei Engineering,Vol.18, No.1. pp. 23-29, 2019.
[22] W. A. Bainbridge, J. Hart, E. S. Kim, and B. Scassellati, “The effectof presence on human-robot interaction,” The 17th IEEE Int. Symp.on Robot and Human Interactive Communication (RO-MAN 2008),pp. 701-706, 2008.
[23] K. Shinozawa, F. Naya, J. Yamato, and K. Kogure, “Differencesin effect of robot and screen agent recommendations on humandecision-making,” Int. J. of Human-Computer Studies, Vol.62,No.2, pp. 267-279, 2005.
[24] A. Powers, S. Kiesler, S. Fussell, S. Fussell, and C. Torrey, “Com-paring a Computer Agent with a Humanoid Robot,” Proc. of theACM/IEEE Int. Conf. on Human-Robot Interaction (HRI ’07),pp. 145-152, 2007.
[25] L. Hoffmann and N. C. KraMer, “Investigating the Effects of Phys-ical and Virtual Embodiment in Task-oriented and ConversationalContexts,” Int. J. Hum.-Comput. Stud., Vol.71, Nos.7-8, pp. 763-774, 2013.
[26] M. B. Mathur and D. B. Reichling, “Navigating a social world withrobot partners: A quantitative cartography of the Uncanny Valley,”Cognition, Vol.146, pp. 22-32, 2016.
[27] C. Bartneck, D. Kulic, E. Croft, and S. Zoghbi, “Measurement In-struments for the Anthropomorphism, Animacy, Likeability, Per-ceived Intelligence, and Perceived Safety of Robots,” Int. J. of So-cial Robotics, Vol.1, No.1, pp. 71-81, 2009.
[28] K. Tokuda, “The Validity of Temporary Mood Scale,” RitsumeikanJ. of Human Sciences, No.22, pp. 1-6, 2011.
[29] M. Malik, J. T. Bigger, A. J. Camm, R. E. Kleiger, A. Malliani, A. J.Moss, and P. J. Schwartz, “Heart rate variability: Standards of mea-surement, physiological interpretation, and clinical use,” EuropeanHeart J., Vol.17, No.3, pp. 354-381, 1996.
[30] X. Zheng, M. Shiomi, T. Minato, and H. Ishiguro, “What kinds ofrobot’s touch will match expressed emotions?,” IEEE Robotics andAutomation Letters, Vol.5, No.1, pp. 127-134, 2020.
Name:Kayako Nakagawa
Affiliation:Researcher, Karakuri Products Inc.Cooperative Researcher, Advanced Telecommu-nications Research Institute International (ATR)
Address:2-1-1 Nihonbashi-hongokucho, Chuo-ku, Tokyo 103-0021, Japan2-2-2 Hikaridai, Keihanna Science City, Kyoto 619-0288, JapanBrief Biographical History:2012 Received Ph.D. in Engineering from Osaka University2016- Cooperative Researcher, ATR2018- Researcher, Karakuri Products Inc.Main Works:• K. Nakagawa, M. Shiomi, K. Shinozawa, R. Matsumura, H. Ishiguro,and N. Hagita, “Effect of Robot’s Whispering Behavior on People’sMotivation,” Int. J. of Social Robotics, Vol.5, No.1, pp. 5-16, 2013.
Name:Reo Matsumura
Affiliation:CEO/CTO, Co-Founder, Karakuri Products Inc.Cooperative Researcher, Advanced Telecommu-nications Research Institute International (ATR)Visiting Researcher, Research Center for Ad-vanced Science and Technology (RCAST), TheUniversity of Tokyo
Address:2-1-1 Nihonbashi-hongokucho, Chuo-ku, Tokyo 103-0021, Japan2-2-2 Hikaridai, Keihanna Science City, Kyoto 619-0288, Japan4-6-1 Komaba, Meguro-ku, Tokyo 153-8904 JapanBrief Biographical History:2012 Received Ph.D. in Engineering from Osaka University2013- Visiting Researcher, RCAST, The University of Tokyo2016- Cooperative Researcher, ATR2016 Founded Karakuri Products Inc.Main Works:• R. Matsumura, M. Shiomi, T. Miyashita, H. Ishiguro, and N. Hagita,“Who is interacting with me? Identification of an interacting personthrough playful interaction with a small robot,” IEEE Trans. onHuman-Machine Systems, Issue 99, pp. 1-11, 2014.
Name:Masahiro Shiomi
Affiliation:Advanced Telecommunications Research Insti-tute International (ATR)
Address:2-2-2 Hikaridai, Keihanna Science City, Kyoto 619-0288, JapanBrief Biographical History:2007- Researcher, ATR2013- Group Leader, Department of Agent Interaction Design Lab, ATRMain Works:• M, Shiomi, K. Shatani, T. Minato, and H. Ishiguro, “How should a RobotReact before People’s Touch?: Modeling a Pre-Touch Reaction Distancefor a Robot’s Face,” IEEE Robotics and Automation Letters, Vol.3, No.4,pp. 3773-3780, 2018.Membership in Academic Societies:• The Robotics Society of Japan (RSJ)
96 Journal of Robotics and Mechatronics Vol.32 No.1, 2020
Powered by TCPDF (www.tcpdf.org)





























