Embed Size (px)
DESCRIPTION
controlk
Citation preview

EE 431 Exam#1 Oct. 22, 2013
75 minutes
Copyright c© 2013 by L. Acar. All rights reserved. No parts of this document may be reproduced, stored in a retrieval system, ortransmitted in any form or by any means without the written permission of the copyright holder(s).
1. Determine
A = cos
λ a 0 00 λ 0 00 0 2λ 00 0 0 3λ
,
where a 6= 0. Show your work and simplify the expressions as much as possible. (20pts)
2. The block diagram of a control system is given below.
1
s + 1
1
1
s + 1
u y
Obtain a state-space representation of the system without any block-diagram reduction. (20pts)
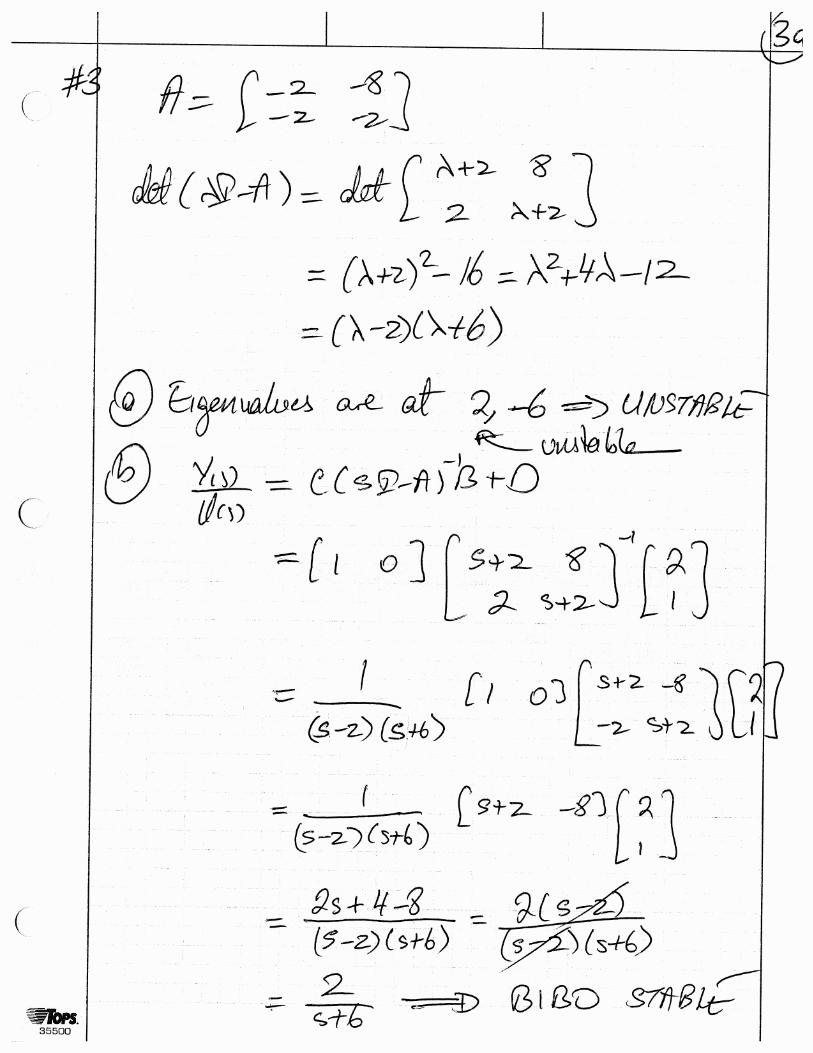
3. A control system is described by
x(t) =
[
−2 −8−2 −2
]
x(t) +
[
21
]
u(t),
andy(t) =
[
1 0]
x(t),
where u, x, and y are the input, the state, and the output variables, respectively.
(a) Determine whether or not the sytem is stable in the state-sense. Show your work clearly. (10pts)
(b) Determine whether or not the sytem is bounded-input bounded-output (BIBO) stable. Showyour work clearly. (10pts)
(c) Determine x(t) for t ≥ 0, when x(0) =[
1 −1]
T, and u(t) = 0 for t ≥ 0. Show all your work
clearly. (15pts)
1

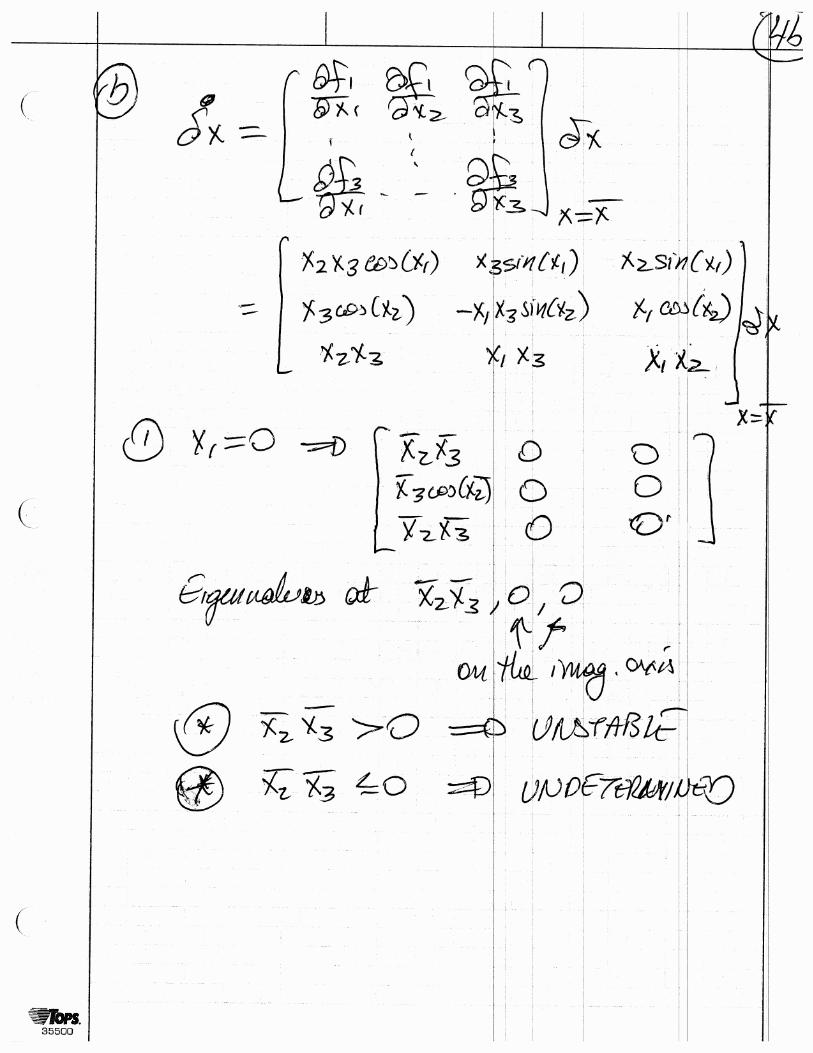
4. The dynamical equations of a nonlinear control system are given by
x1(t) = x2(t) x3(t) sin(
x1(t))
,
x2(t) = x1(t) x3(t) cos(
x2(t))
,
x3(t) = x1(t) x2(t) x3(t),
where x1, x2, and x3 are the state variables.
(a) Determine all the equilibrium states of the system. (10pts)
(b) Check the local stability of the system using Lyapunov’s First Stability Theorem for all theequilibrium states. (15pts)
2