CHAPTER 1
INTRODUCTION
Intelligent control is a control theory tehnique that uses
artificial intelligence in process of controlling dynamical
systems. Some types of intelligent control are neural networks,
fuzzy logic, machine learning, ant colony and genetic algorithm. In
this research, it will be discuss about use of genetic algorithm
for tuning cascade PID controller.
Since PID controllers perform in real-time, external
disturbances are always present. Cascade connection of PID
controllers will be used to avoid those disturbances and to keep
controlling process optimal.
Genetic algorithm is a simulation of a process of genetic
inheritance in nature. It is effective way for transferring the
best properties from generation to the next one. The best fitting
genes from both parents are selected and incorporated into new
generation.
Control theory is an interdisciplinary branch of engineering.
and its essential part. There is a controlling process as a part of
every dynamical system. Effective control makes the difference
between feasible system and unfeasible one. PID control has been
used in many applications and its tuning process can be a major
challenge. The best fitting PID coefficients are needed for a
system to have an optimal performance. This analogy can be used for
development of genetic algorithm, which as a result, will have
coefficients of PID controller. For these purposes, MATLAB tools
will be used.After PID coefficient calculation, results will be
analyzed and statistically processed, pattern in result changes
according to system requirement changes will be found, so process
of control will be kept optimal in situation of different input
values.
At the end, practical implementation of cascade PID controlling
process will be performed using FPGA integrated circuit. FPGA will
be programmed using Verilog Hardware Description Language. System
will be ready for practical application in industrial control
processes (motor drive cascade PID controller).
CHAPTER 2
CASCADE PID CONTROL
2.1 PID Controller
PID controller is feedback loop controller used in industrial
control systems. It was first introduced in 1939 and has remained
the most widely used controller in process control until today. An
investigation performed in 1989 in Japan indicated that more than
90 % of the controllers used in industries are PID controllers and
its advanced versions (Araki, 2005).
A PID controller calculates an error value as the difference
between a measured process variable and a set point. The controller
minimizes the error by adjusting the process variable.
Figure 2.1 Block Diagram of a PID Controlled ProcessPID
controller consists of three constant parameters: P - proportional
to error function, represents present error; I - integral of error
function, represents past errors; D derivative of error function,
represents future errors. Manipulation of these parameters shapes
the response of the controller to an error; the degree controller
overshoots the set point, and the degree of system oscillation.
Two basic requirements are regulation (reaching given set point,
disturbance rejection) and command tracking (implementing set point
changes). Specific criteria for command tracking include settling
time and rise time. An overshoot of the process variable beyond the
set point must not be allowed if it would be unsafe. Otherwise, it
must have an optimal value. Other processes must reduce the energy
consumption in reaching a new set point.
PID controller tuning is the adjustment of its parameters, P, I
and D, to the optimum values for the desired control response.
Stability is a basic requirement, but various systems have
different behavior, so different requirements need to be met and
requirements may conflict with one another. If PID parameters are
chosen incorrectly, the controlled process output can be unstable.
Stabilization of response is required and the process must not
oscillate for any combination of process set points and
conditions.
PID tuning is a major engineering challenge, even though there
are up to three parameters, because it must fulfill complex
criteria of PID control. Various methods exist and more
sophisticated techniques are the subject of patents. PID controller
designing and tuning can be hard in practice, if conflicting
targets such as high stability and short transient are to be
achieved. PID controller performance can be improved by careful
tuning. Initial designs need to be adjusted repeatedly until the
system performs as requiredSome applications require only one or
two actions to provide the appropriate system control. This is
achieved by setting unnecessary parameters to zero. PI controllers
are common, since derivative gain is sensitive to disturbances and
noise and absence of an integral gain may prevent the system from
reaching its target value.
2.2 Cascade Control
Major advantage of PID controllers is usage of two PID
controllers together to improve better dynamic performance. This is
called cascade PID control. In cascade control there is a
connection of two controllers with one controlling the set point of
another. First acts as outer loop controller, which controls the
primary physical parameters. Second acts as inner loop controller,
which reads the output of outer loop controller as set point,
usually controlling a more rapid changing parameter. Cascade
control is used to achieve fast rejection of disturbances. The main
purpose of using cascade control as a strategy is to allow the
secondary loop to control disturbances before they can affect the
primary loop.
Figure 2.2 Cascade PID Control Block Diagram
As shown in figure 2.2, controller C1 in the outer loop is the
primary controller that regulates the primary controlled variable
y1 by setting the set-point of the inner loop. Controller C2 in the
inner loop is the secondary controller that rejects disturbance d2
locally before it propagates to P1. (Mathworks, 2014)
2.3 Motor as an Object of Control
Induction motors are the most important parts of every industry
branch and they are produced in large number. About half of the
electrical energy generated in a developed country is ultimately
consumed by electric motors, of which over 90 % are induction
motors (Tze_Fun Chan, 2011). Induction motors have mainly been
deployed in constant-speed motor drives. The development of power
electronics devices and converter technologies has made possible
efficient speed control by varying the supply frequency, giving
rise to various forms of adjustable-speed induction motor drives
(Tze_Fun Chan, 2011). There are advances in artificial intelligence
techniques and control methods, including genetic algorithm, neural
networks and fuzzy logics. Performance of induction motor can be
improved with these techniques. Since the 1990s, AI-based induction
motor drives have received greater attention and numerous technical
papers have been published (Tze_Fun Chan, 2011). Speed-sensorless
induction motors have become as an important branch of induction
motor research. Some electric drive producers began to incorporate
AI-control in commercial products.
CHAPTER 3
GENETIC ALGORITHM
Genetic algorithm is part of the class of evolutionary
algorithms used in field of artificial intelligence. Evolutionary
algorithms are search and optimization methods, based on the
principle of natural selection in genetics. In general, any
iterative, population based approach that uses selection and random
variation to generate new solutions can be regarded as an EA.
Genetic algorithms became known through the work of John Holland in
the early 1970s and was popularized by Goldberg in 1989 and, as a
result, the majority of control applications in the literature
adopt this approach (Muhammet nal, 2013). Their applications
include several types of problems such as designing the
communication networks, optimizing the database query and
controlling the physical systems. Thus, GA has become a robust
optimization tool for solving the problems related to different
field of the technical and social sciences (Muhammet nal,
2013).
3.1 Theoretical Foundations
GA scans the most suitable of the chromosomes that built the
population in the potential solutions space. It tries to balance
two opposite objectives: searching the best solutions and expanding
the search space. During execution of GA, evolution of a population
of solutions (phenotype) leads toward set of better solutions of an
optimization problem. Each solution candidate has properties
(genotype) which can be mutated and altered. Solutions are usually
represented as strings of bits in binary code, but other encodings
are possible. Coding method has a decisive effect on the
performance of the GA. (Whitley, 1994).The selection usually starts
from a population of randomly generated individuals which
represents first generation, and is an iterative process, with the
population in each iteration representing a new generation. In each
generation, fitness of every individual has been evaluated. The
fitness is usually the value of the objective function in the
optimization problem being solved. Fit individuals are
stochastically selected from the current population and each
individual's genome is modified, recombined and possibly randomly
mutated to form a new generation. The new generation of candidate
solutions is then used in the next iteration of the algorithm.
Usually, the algorithm terminates when either a maximum number of
generations has been produced, or a satisfactory fitness level has
been reached for the population (Michalewicz, 1996).
A typical genetic algorithm requires a genetic representation of
a solution domain and fitness function to evaluate the solution
domain. When genetic representation and fitness function are
defined, GA proceeds to initialize a population of solutions and
then to improve it through repetitive application of the mutation,
crossover, inversion and selection operators.
Initially, many individual solutions are randomly generated to
form a population. The population size depends on the nature of the
problem, containing several hundreds or thousands of possible
solutions. The population is generated randomly, allowing the
entire range of possible solutions. During each successive
generation, a proportion of the existing population is selected to
breed a new generation. Individual solutions are selected through a
fitness-based process, where fitter solutions, according to a
fitness function, are typically more likely to be selected. The
fitness function is defined over the genetic representation and
measures the quality of the represented solution and it is problem
dependent.
Next step is to generate a second generation population of
solutions from those selected through a combination of genetic
operators, crossover and mutation. The crossover operator can be
described as exchanging two chromosomes chosen as the parents.
Crossover point number is one. The other important crossover method
is uniform crossover. In this method, each parents genes crossed
over with different probabilities (Syswerda, 1989). Mutation
operator changes one or more genes in the chromosome.
Traditionally, mutation operator is used rarely. Usually, the
crossover probability (Pc) is chosen between 0.25 and 1, and
mutation probability (Pm) is chosen between 0.01 and 0.001 (Bck,
1993).
GA process is repeated until a termination condition has been
reached. Terminating conditions are:- solution is found that
satisfies minimum criteria- fixed number of generations reached-
computation time reached- the highest ranking solution's fitness is
reached or has reached a point that successive iterations no longer
produce better results- manual inspection
3.2 MATLAB Implementation
Genetic algorithm can be simulated and implemented with MATLAB
tool. In the toolbox, the ga function may be used as GAs fitness
function to optimize a MATLAB function (Mathworks, 2014). The basic
steps of genetic algorithm are as follows. generate a random
population of n chromosomes which have a proper form for the
problem run fitness function; evaluate the fitness function using
each chromosome in the population. evaluate results, if conditions
are satisfied, then GA stops and outputs the best chromosome of
current population. select two or more parent chromosomes from a
population according to their fitness (the better the fitness of a
chromosome, the greater is its chance of being selected). with a
crossover probability cross over the parents to form a new
offspring, if no crossover was performed, the offspring is an exact
copy of the parents. with a mutation probability mutate new
offspring at each locus (position in chromosome). place new
offspring in the old population to create a new population and use
a new generated population for a further run of the algorithm
(Tze_Fun Chan, 2011).
CHAPTER 4
FPGA
4.1 General Notions
A field-programmable gate array is an integrated circuit
designed to be field-programmable by a designer. The FPGA
configuration is generally specified using a hardware description
language. FPGA has large resources of logic gates and RAM blocks to
implement complex digital computations. FPGA contains programmable
logic components called logic blocks and a hierarchy of
reconfigurable interconnections that allow the blocks to be wired
together. Logic blocks can be configured to perform complex
combinational, or simple logic functions like AND and XOR.
Some FPGAs have analog features in addition to digital
functions. A few FPGA have integrated peripheral analog-to-digital
converter and digital-to-analog converter.Application of FPGA
includes digital signal processing, software-defined radio, medical
imaging, computer vision, speech recognition, cryptography,
bioinformatics, computer hardware emulation, radio astronomy, metal
detection and other areas.
4.2 DE2-115 Development and Education Board
The Altera DE2-115 Development and Education board was designed
by professors. It is an ideal vehicle for learning about digital
logic, computer organization, and FPGA. Featuring an Altera Cyclone
IV 4CE115 FPGA, the DE2-115 board is designed for university
laboratory use. It is suitable for a wide range of exercises in
courses on digital logic and computer organization, from simple
tasks that illustrate fundamental concepts to advanced designs
(Altera, 2014).
Figure 4.1 Altera Cyclone IV 4CE115 FPGA, the DE2-115
4.3 Verilog Hardware Description Language
Verilog is a hardware description language used to model
electronic systems. It is most commonly used in the design and
verification of digital, analog and mixed-signal circuits.
Hardware description languages are different from software
programming languages because they include ways of describing
signal propagation time and sensitivity.Verilog's concept of wire
consists of both signal values and strengths. This system allows
abstract modeling of shared signal lines, where multiple sources
drive a common net. When a wire has multiple drivers, the wire's
value is resolved by a function of the source drivers and their
strengths.A subset of statements in the Verilog language is
synthesizable. Verilog modules that conform to a synthesizable
coding style can be physically realized by synthesis software.
Synthesis software algorithmically transforms the abstract Verilog
source into a net list, a logically equivalent description
consisting only of elementary logic primitives (AND, OR, NOT,
flip-flops, etc.) that are available in a specific FPGA or
technology. Further manipulations to the net list ultimately lead
to a circuit fabrication blueprint (such as a bit stream file for
an FPGA).
CHAPTER 5
EXPERIMENTAL RESULTS (GA FOR CASCADE PID)
5.1 The Model
Next demonstration shows a PID controller optimized by MATLAB GA
function ga when the control system is a Simulink model. To call
Simulink model from MATLAB, the model must be built, and then a
MATLAB programming function is used to call the Simulink model.
A Simulink model of a cascade PID control system is built, as
shown in Figure 5.1. Cascade PID control system will be optimized
by GA. It has been simulated by a Transfer function blocks. A Step
block has been used to create a control reference. An Out1 block
has been used to export calculation results of the Simulink model.
The model has been saved with the filename PID_controller.mdl.
Parameters of cascade PID controller consist of three variables,
P1, I1, D1=0 for inner PID and P2, I2; D2=0 for outer PID.
Parameters D1 and D2 are set to 0 to avoid noise disturbances.
Figure 5.1 Cascade PID Simulink Model (modified) (Tze_Fun Chan,
2011)
5.2. Methodology
In order to call the Simulink model from MATLAB platform, a
MATLAB function Call_PID.m has been programmed (Appendix 1.). In
MATLAB/Simulink, there are two workspaces, one is named caller
which stores variable values of MATLAB function and other workspace
is named as base which stores variable values of Simulink model
input and output. Because the ga function is a MATLAB function, an
assignin function is employed to transfer data between two
workspaces. In this way, the variable values may be exchanged
between function Call_PID.m and model PID_controller.mdl.
Overshoot variable is changeable, in range from 1 to 1.5 of an
output signal amplitude with 0.05 difference.
For loop calculates mean square error of the plant output and
command reference R, then error function has been evaluated.
The GA simulation has been performed in PID.m file (Appendix
2.). After GA options and PID parameters boundaries have been set,
value of fitness function has been calculated and the plot has been
drawn, as shown in Figure 5.2.
Figure 5.2 Genetic Algorithm Simulation Plot
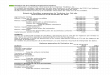
5.3. Results for Various Overshoot Values
GA has been simulated for different overshoot values of PID
controller output. It is performed for each value (1.0 to 1.5 of a
PID output signal amplitude, with 0.05 difference) ten times and
the best fitting five fitness function values and corresponding PID
parameters have been used, as shown in Table 5.1. For every
overshoot value, one group of data has been chosen for statistical
processing. For these purposes, MATLAB function cftool has been
used.
Table 5.1 Cascade PID GA simulation results
5.4. Curve Fitting Tool and Conclusions
After GA simulation has been performed, curve fitting function
has been used to find the pattern of cascade PID coefficients
dependence on different overshoot values and its mathematical
formulation. MATLAB cftool function executes this task. Graphical
and mathematical form will help in better projection of system
cascade PID control process.
Figure 5.3 P1 curve fitting
Coefficients:
a1 =0.6402 b1 =1.204 c1 =0.3399 a2 =0.128 b2 =1.474 c2
=0.08749
Figure 5.4 I1 curve fitting
Coefficients:
a1 =3.494 b1 =1.204 c1 =0.5045 a2 =0.5261 b2 =1.497 c2
=0.1026
Figure 5.5 P2 curve fitting
Coefficients:
a1 =3.514 b1 =2.531 c1 =4.549 a2 =0.5879 b2 =23.36 c2 =-11.1 a3
=0.3774 b3 =36.43 c3 =3.348
Figure 5.6 I2 curve fitting
Coefficients:
a1 =0.1462 b1 =3.622 c1 =3.015 a2 =0.01066 b2 =15.48 c2 =-3.88
a3 =0.02843 b3 =36.9 c3 =1.825
Cascade PID controller coefficients P1 and I1 can be represented
with Gaussian normal distribution function. On the other hand,
cascade PID controller coefficient P2 and I2 can be represented
with sinusoidal function. Their variation caused by overshoot
variation can be predicted and system can be controlled. GA results
can successfully be used for cascade PID controller tuning.
CHAPTER 6
PRACTICAL IMPLEMENTATION (FPGA & PID)
6.1. The Model
Digital computers are necessary part of a control system. It is
essential to convert real-world analog signals and its numerical
representation to digital ones, so they could be properly
processed.
FPGA integrated circuit uses 16-bit digital representation of an
analog signal received after process of cascade PID tuning GA was
performed. Digital display shows 4-digit number, with each digit
representing 4-bits. The number symbolizes amplitude of an analog
signal received from system response after PID controlling
process.
After starting value, representing overshoot amplitude of the
signal, each switching will change that value and it will represent
oscillation process and decreasing will represent settling
process(Appendix 3).
Figure 6.1 FPGA board performing PID control
6.2. The Final System
Final system for cascade PID controlling process is ready.
Results of GA simulation used for cascade PID controller tuning
will lead to required response of a system being controlled. On the
other hand, FPGA will perform digital conversion and computer
systems will be applicable in controlling process. The final system
is ready for practical implementation of an induction motor cascade
PID control.
CONCLUSION
Intelligent control advance in last few decades has improved
industrial process and products in various branches. Many
techniques have been used. As shown in this research, GA can be
used in process of cascade PID controller tuning with satisfactory
results in accordance with system requirements After GA simulation
has been performed, cascade PID controller coefficients have been
calculate and the controller have been tuned. Statistical
processing of results has showed that pattern exists and
controlling process can be predicted for different input values and
requirements. Since system is feasible, it can be practically
implemented using FPGA controlled by a computer system. Cascade PID
controller can be used in process of induction motor drive
control.
The research has shown that GA is advanced intelligent control
technique that improves process of design and development of
cascade PID controller and its tuning. As a consequence, process
being controlled will be more accurate and reliable.
REFERENCES
Altera. (2014). http://www.altera.com/.Araki. (2005). Control
System, Robotics and Automation - vol II - PID Control. Kyoto:
Kyoto University.Bck, T. (1993). Optimal Mutation Rates in Genetic
Search, Proceeding of the Fifth International Conference on Genetic
Algorithms. CL, USA.Control Solutions, I. M. (n.d.).
http://www.csimn.com/.Mathworks, I. (2014).
http://www.mathworks.com/.Michalewicz. ( 1996). Genetic algorithms
and data structures. Springer, USA.Mitchell, M. (1996). An
Introduction to Genetic Algorithms. Cambridge, MA: MIT
Press.Muhammet nal, A. A. (2013). Optimization of PID Controllers
Using Ant Colony and Genetic Algorithms. Springer-Verlag Berlin
Heidelberg.Syswerda, G. (1989). Uniform Crossover in Genetic
Algorithms. In: Proceeding of theThird International Conference on
Genetic Algorithms . NJ, USA.Tze_Fun Chan, K. S. (2011). Applied
Intelligent Control of Induction Motor Drives. John Wiley &
Sons (Asia) Pte Ltd.Whitley, D. (1994). A genetic algorithm
tutorial, Statistics and Computing 4 (2).
APPENDIX 1
Call_PID.m MATLAB CODE
function s=
Call_PID(x)assignin('base','P1',x(1));assignin('base','P2',x(2));assignin('base','I1',x(3));assignin('base','I2',x(4));[tout,xout,yout]=sim('PID_controller',200);z=yout;overshoot=0.1;%Overshoot
is expressed as a percentage of
amplitudes=0;[m,n]=size(z);%Evaluating the error functionif
max(z)>1+overshoot s=1/eps;elseV=0;R=1;for i=1:m
V=V+(R-z(i))^2;ends=V/m;endend
APPENDIX 2
PID.m MATLAB CODE
clc;%clear;options=gaoptimset(@ga);%Setting Genetic Algorithm
optionsoptions=gaoptimset(options,'PlotFcns',{@gaplotbestf},'Display','iter');options=gaoptimset(options,'PopulationSize',40);options=gaoptimset(options,'EliteCount',10);options=gaoptimset(options,'CrossoverFraction',0.6);options=gaoptimset(options,'Generations',140);options=gaoptimset(options,'MutationFcn',@mutationadaptfeasible);%Setting
bounds for P and I componentslb=[0 0 0 0];ub=[60 10 60 10];%calling
the
function[x,fval]=ga(@Call_PID,4,[],[],[],[],lb,ub,[],options);
APPENDIX 3
QUARTUS CODE FOR FPGA
module Edvin(SW, HEX0, HEX1, HEX2, HEX3);input [2:0] SW;output
[6:0] HEX0, HEX1, HEX2, HEX3;wire [15:0] x, e1, e2, y1, y2, r1,
r2;SI pravimoUlaz(SW[0], x);//Write PIPI vanjskiRegulator(r2, e2,
SW[1],SW[2]);defparam vanjskiRegulator.k1=6;defparam
vanjskiRegulator.k2=5;PI unutrasnjiRegulator(r1, e1,
SW[1],SW[2]);defparam unutrasnjiRegulator.k1=6;defparam
unutrasnjiRegulator.k2=5;PI prvaPolovina(y1, r1,
SW[1],SW[2]);defparam prvaPolovina.k1=1;defparam
prvaPolovina.k2=0;PI drugaPolovina(y2, y1, SW[1],SW[2]);defparam
drugaPolovina.k1=1;defparam drugaPolovina.k2=0;assign
e2=x-y2;assign e1=r2-y1;Disp7 Ispis(e2, HEX0, HEX1, HEX2,
HEX3);endmodule
module SI(prekidac, kabl);input prekidac;output [15:0]
kabl;assign kabl=150*prekidac;endmodule
module PI(output reg [15:0] u_out,input signed [15:0] e_in,
input clk, input reset);parameter k1;parameter k2;reg signed [15:0]
u_prev;reg signed [15:0] e_prev[1:2];//assign u_out = u_prev +
k1*e_in-k2*e_prev[1];always @ (posedge clk)if (reset == 1)
beginu_prev