Embed Size (px)
Citation preview

Department of Mechanical EngineeringEDC2002
A Graphical User Interface for Computer-aided Robust Control System Design
J.F. Whidborne, S.J. King P. Pangalos, Y.H. Zweiri
Department of Mechanical EngineeringEDC2002
Introduction
• Graphical classical control design tools (Bode, Nyquist etc) developed before advent of efficient numerical computation - good qualitative information
• Early quantitative methods (linear-quadratic optimal control) developed in 1950’s before availability of graphical input and output devices
• Multivariable computer-based graphical methods (inverse Nyquist array, characteristic locus array) do not exploit numerical capabilities of modern digital computer & suffer from curse of dimensionality
• Modern frequency-based approaches, (H, ) exploit graphical &
numerical potential of modern computers - suffer curse of dimensionality less - but lack of supporting GUI-based tools.
Department of Mechanical EngineeringEDC2002
McFarlane & Glover’s Loop Shaping Design Procedure (LSDP)
• modern H-optimization approach (H-norm is max magnitude of frequency response)
• multivariable (many inputs and outputs)• robust (stability guaranteed in the face of plant
perturbations & uncertainty)• based on concepts from classical Bode plot methods
- graphical frequency domain method• number of graphical plots required is max(n,m)+n+m
(Inverse Nyquist Array requires nxm)

Department of Mechanical EngineeringEDC2002
LSDP - Step 1
• augment plant G with weighting functions W1 and W2
G(s) W2(s)W1(s)
Augmented Plant Gs(s)
Department of Mechanical EngineeringEDC2002
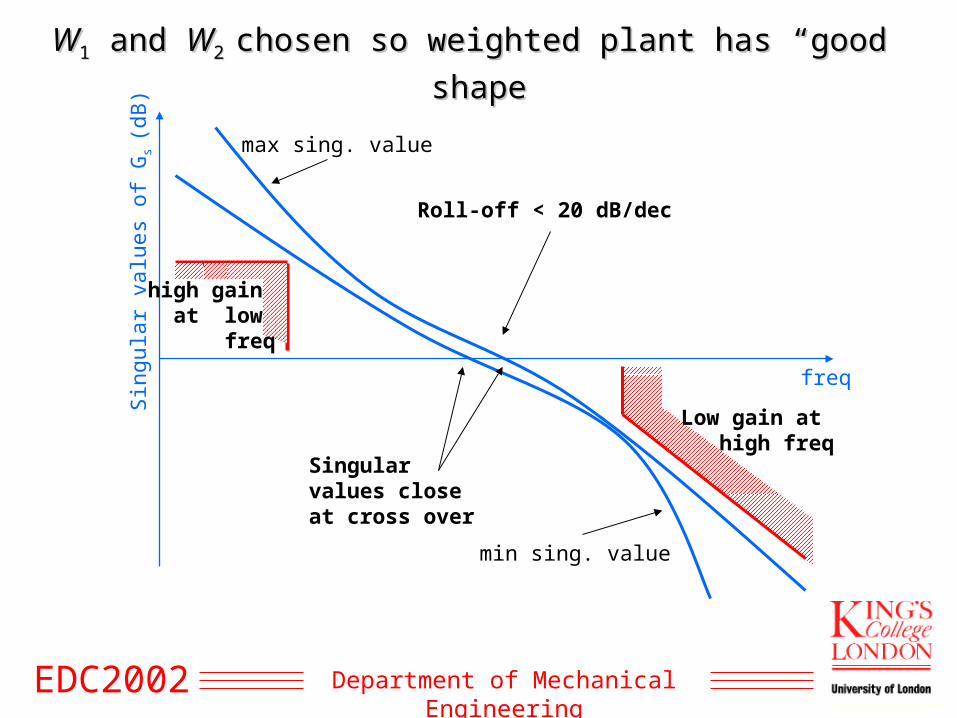
WW11 and and WW2 2 chosen so weighted plant has “good” shapechosen so weighted plant has “good” shape
high gain at low
freq
Low gain at high freq
Singular values close at cross over
Roll-off < 20 dB/dec
max sing. value
min sing. value
freq
Sin
gula
r va
lues
of G
s (d
B)
Department of Mechanical EngineeringEDC2002
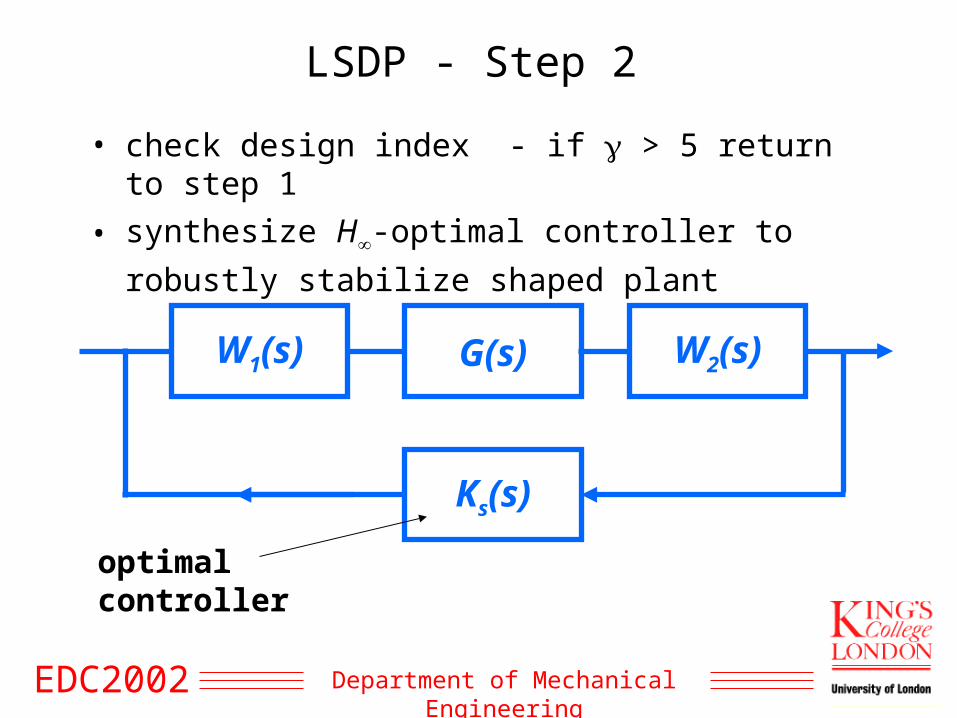
LSDP - Step 2
G(s) W2(s)W1(s)
Ks(s)
optimalcontroller
• check design index - if > 5 return to step 1
• synthesize H-optimal controller to robustly stabilize
shaped plant
Department of Mechanical EngineeringEDC2002
G(s)
W1(s) Ks(s) W2(s)
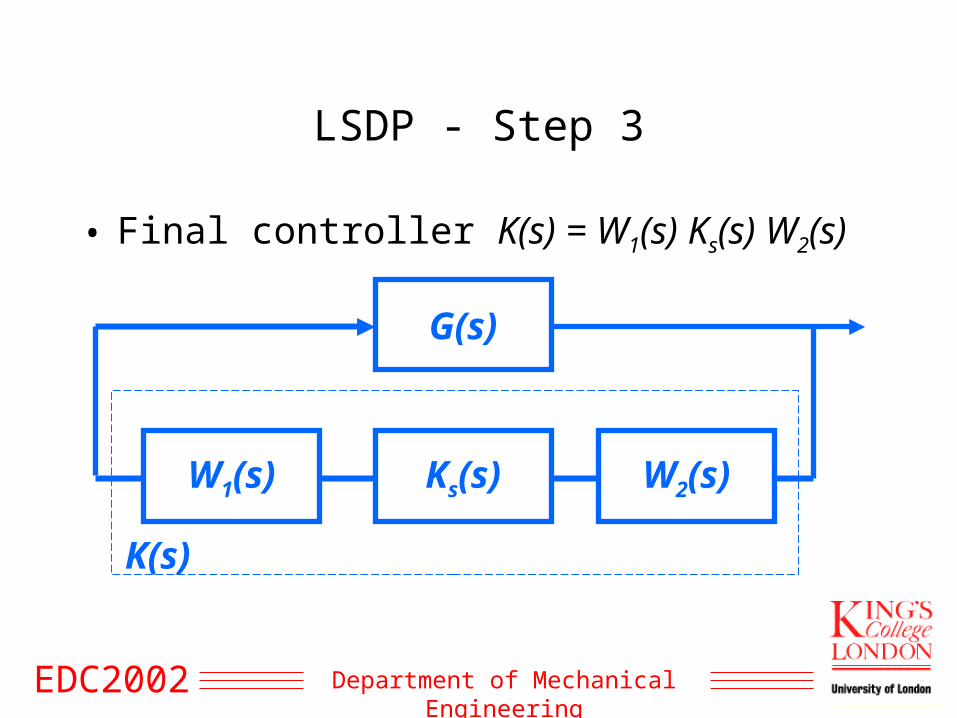
LSDP - Step 3
• Final controller K(s) = W1(s) Ks(s) W2(s)
K(s)
Department of Mechanical EngineeringEDC2002
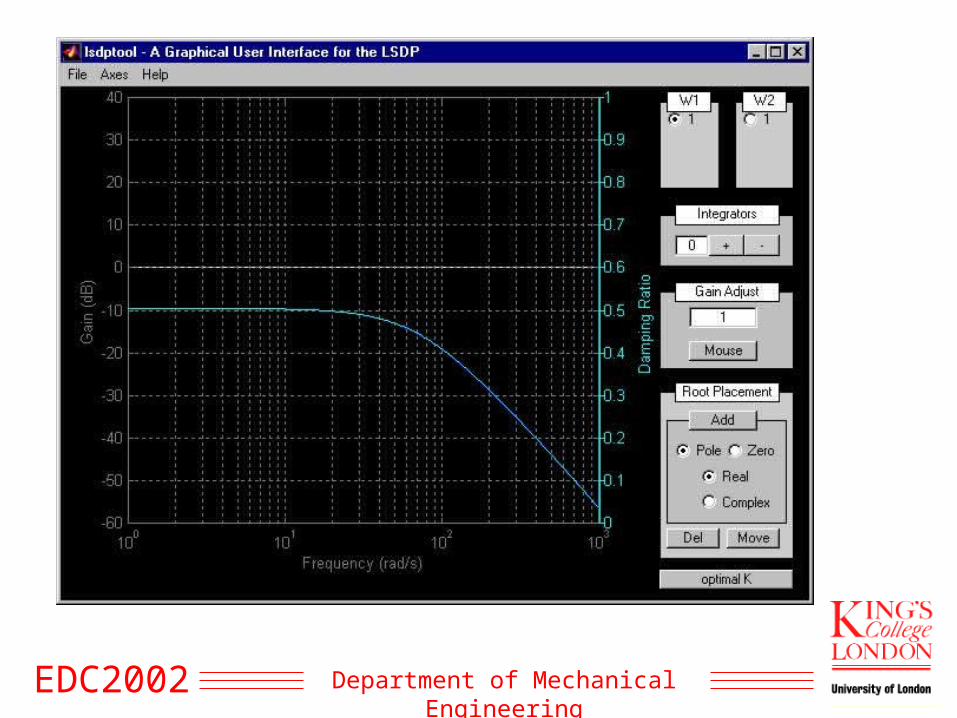
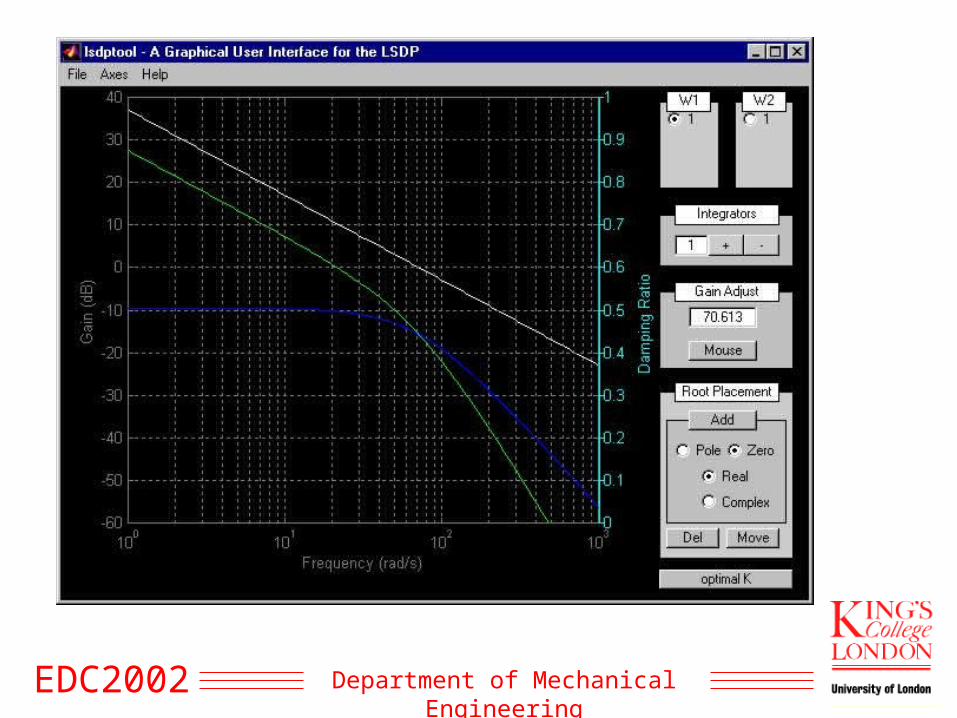
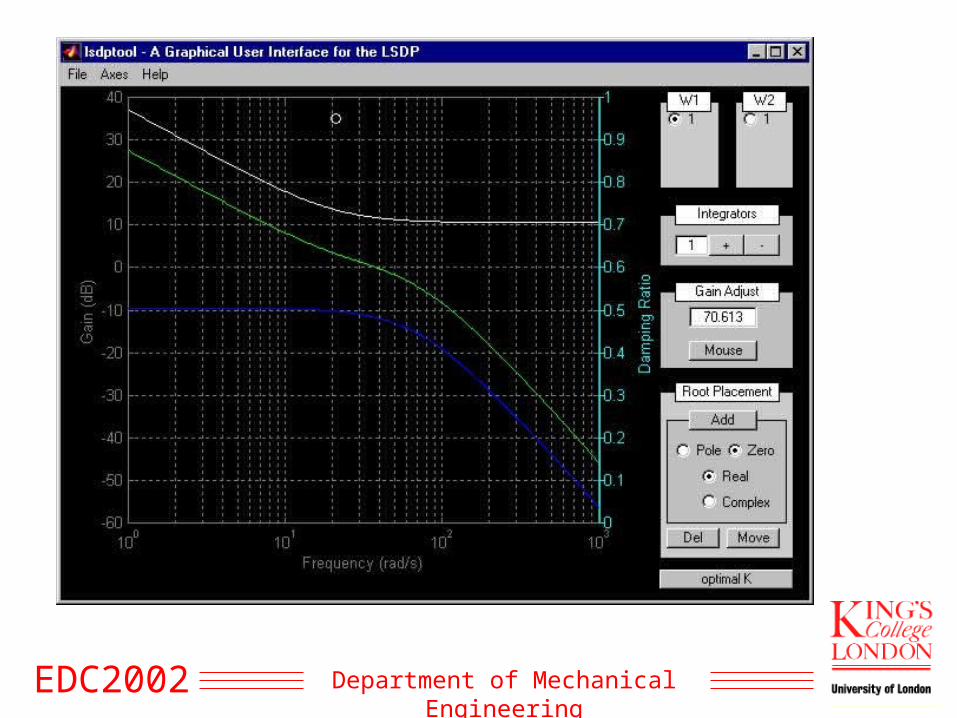
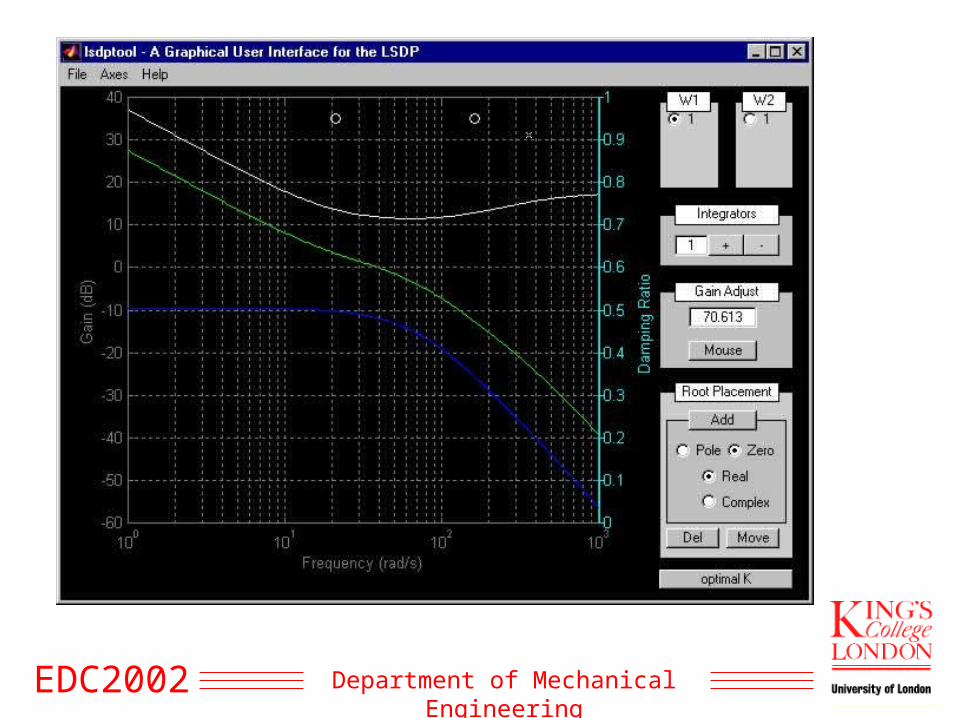
LSDPTOOL - A Graphical User Interface MATLAB© Toolbox
• Features– main GUI for designing weighting functions
W1 and W2
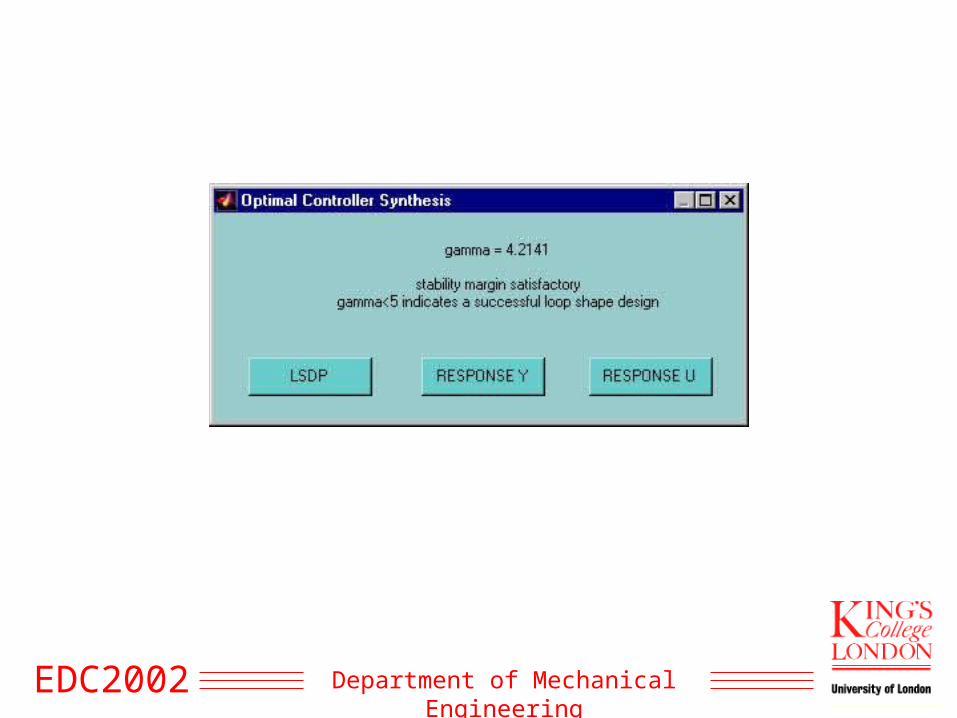
– GUI for input and editing model G(s)– window for displaying design index and
step responses– full MATLAB© help system– load, save, print options
Department of Mechanical EngineeringEDC2002
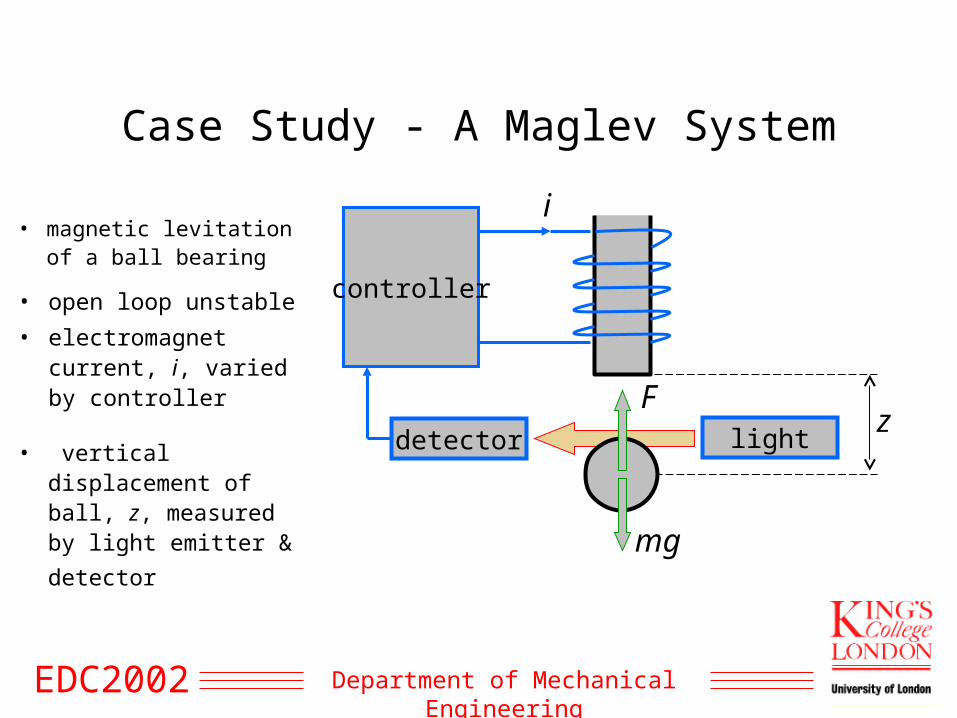
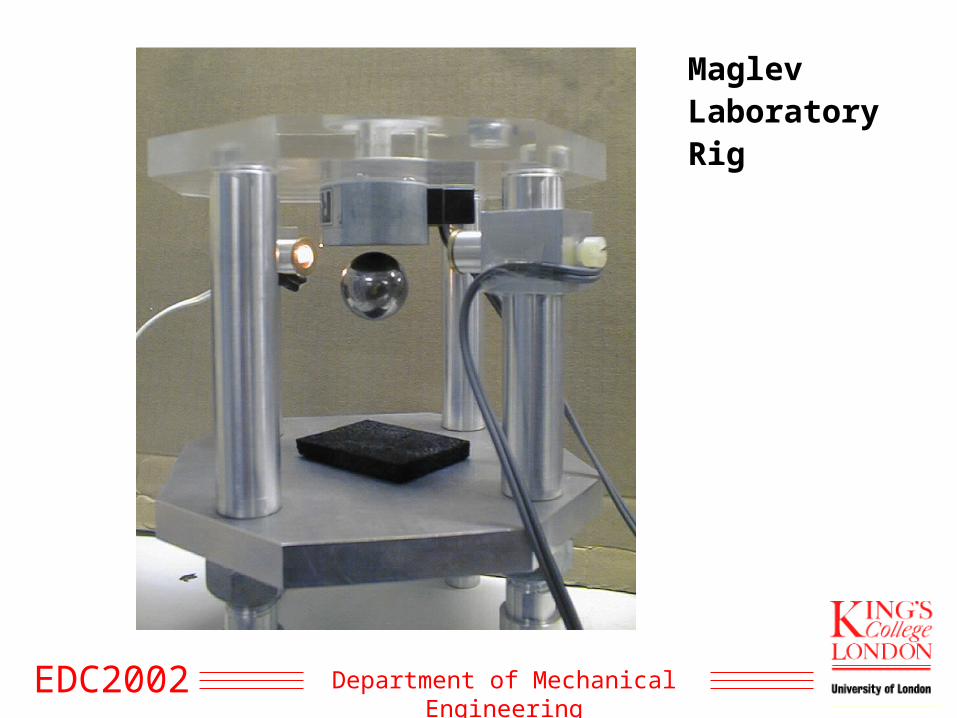
Case Study - A Maglev System
• magnetic levitation of a ball bearing
controller
detector lightz
• open loop unstable
• electromagnet current, i, varied by controller
• vertical displacement of ball, z, measured by light
emitter & detector
F
mg
i

Department of Mechanical EngineeringEDC2002
Maglev Controller Design
• Small deviations of system from equilibrium gives linearised system state description
where
• LSDPTOOL used to design controller

Department of Mechanical EngineeringEDC2002
Department of Mechanical EngineeringEDC2002
Department of Mechanical EngineeringEDC2002
Department of Mechanical EngineeringEDC2002
Department of Mechanical EngineeringEDC2002
Department of Mechanical EngineeringEDC2002

Department of Mechanical EngineeringEDC2002
• Design index value = 4.23 indicates a good design
• Weighting functions:
• System simulated in SIMULINK©
Controller Design

Department of Mechanical EngineeringEDC2002
Step Responses (Non-linear Model)
Department of Mechanical EngineeringEDC2002
Maglev Laboratory Rig

Department of Mechanical EngineeringEDC2002
Toolbox Availability
• Available on WWW at
http://www.eee.kcl.ac.uk/mecheng/jfw/lsdptool.html
• or through MATLAB CENTRAL on Mathworks
WWW site at
http://www.mathworks.com/














![««[ƒfirêlïgh† / S.J.]»»](https://img.dokumen.tips/doc/110x75/579053f41a28ab900c8e73fe/freligh-sj.jpg)