Embed Size (px)
Citation preview
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
ECEN 5737: Adjustable Speed Drives
Lecture 8
• Lecturers: Dr. Nikola Milivojevic Dr. Yusuf Gurkaynak • Teaching Assistant: Joshua Traube
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
Lecture Outline:
• Principle of Operation • 1 quadrant operation • CCM vs. DCM • 2 quadrant operation • 4 quadrant operation • Chopper types
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
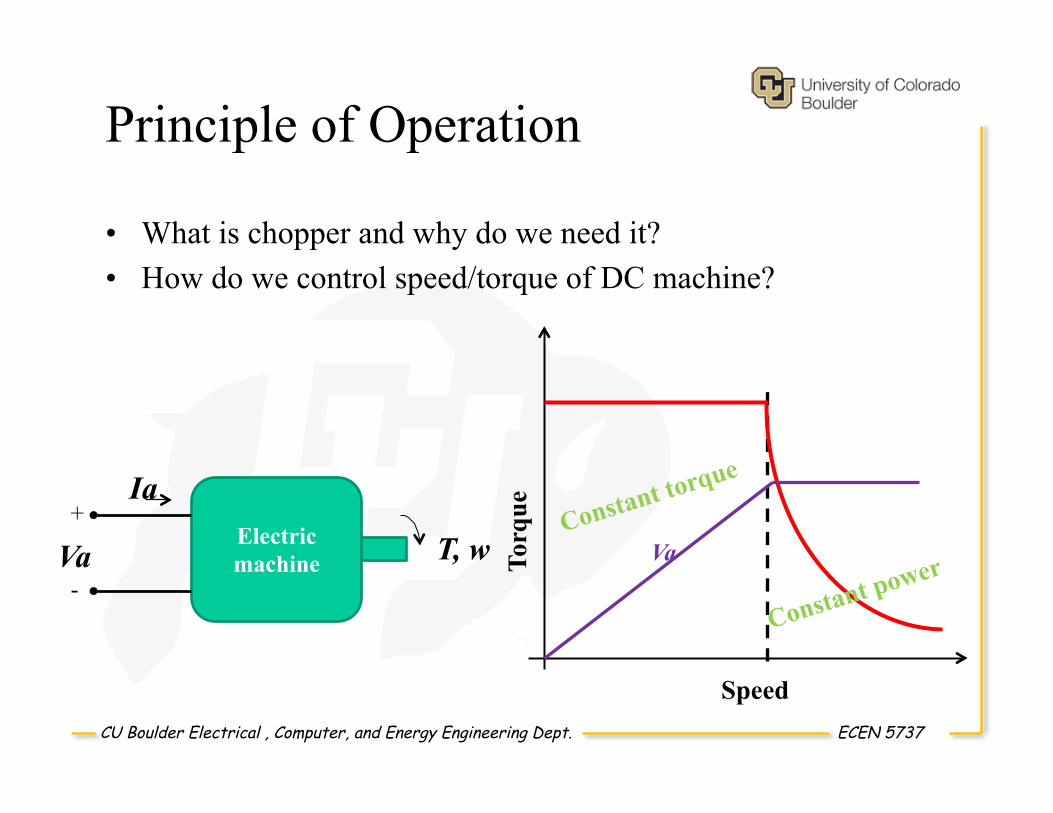
Principle of Operation
• What is chopper and why do we need it? • How do we control speed/torque of DC machine?
Electric machine
+
- Va
Ia
T, w Torq
ue
Speed
Va Constant torque
Constant power
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
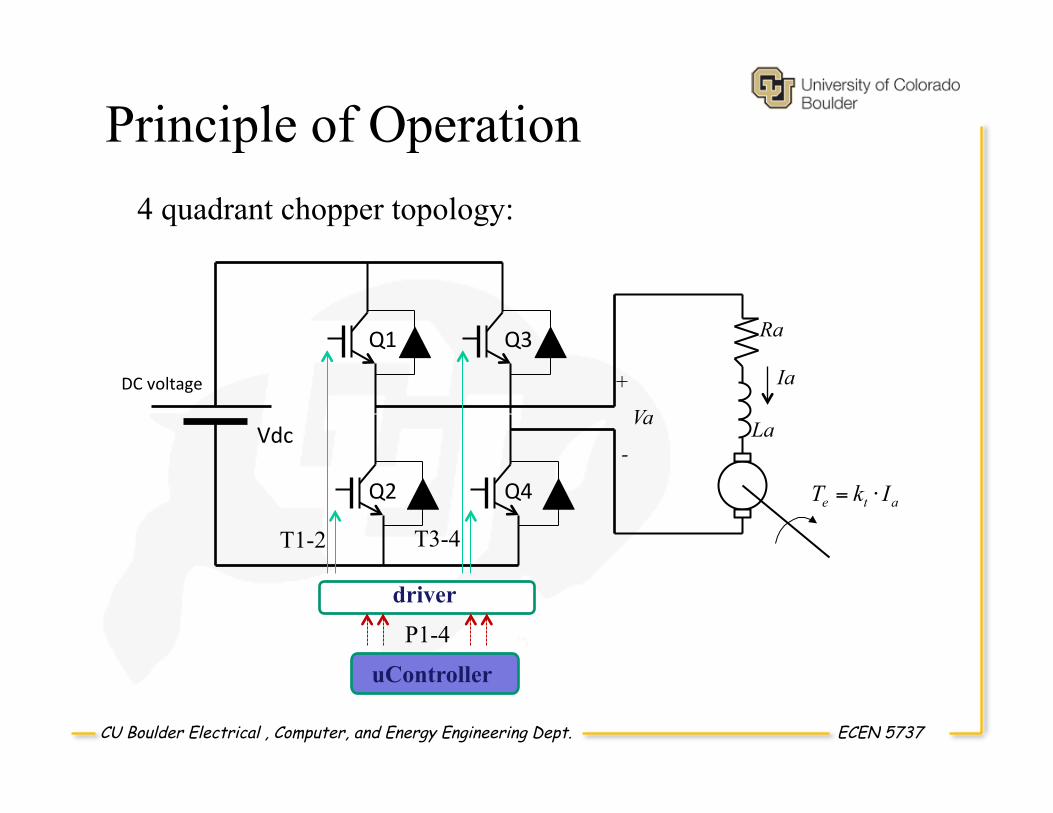
Principle of Operation
Q1 Q3
Q2 Q4
Vdc
DC voltage
ate IkT ⋅=
Ia
Ra
La
4 quadrant chopper topology:
uController
driver
P1-4
T1-2 T3-4
Va
+
-
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
Principle of Operation
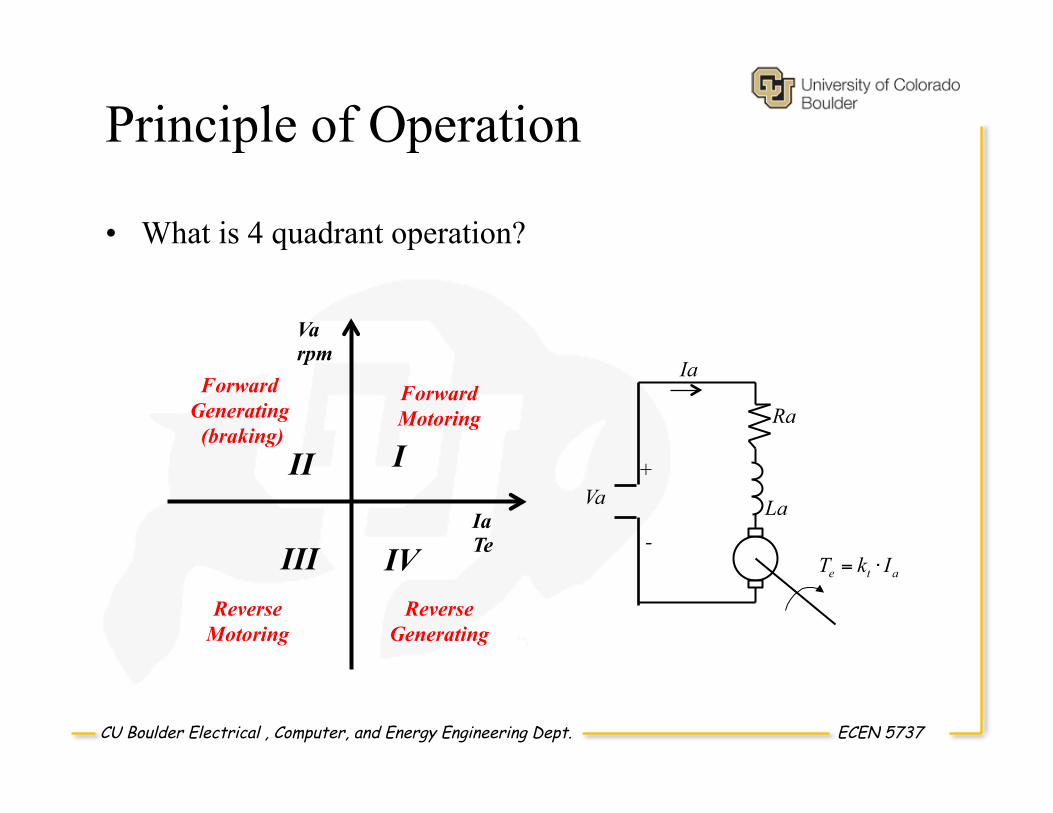
• What is 4 quadrant operation?
ate IkT ⋅=
Ia
Ra
La Va +
-
Va
Ia
rpm
Te
I
IV III
II
Forward Motoring
Reverse Generating
Forward Generating (braking)
Reverse Motoring
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
Principle of Operation
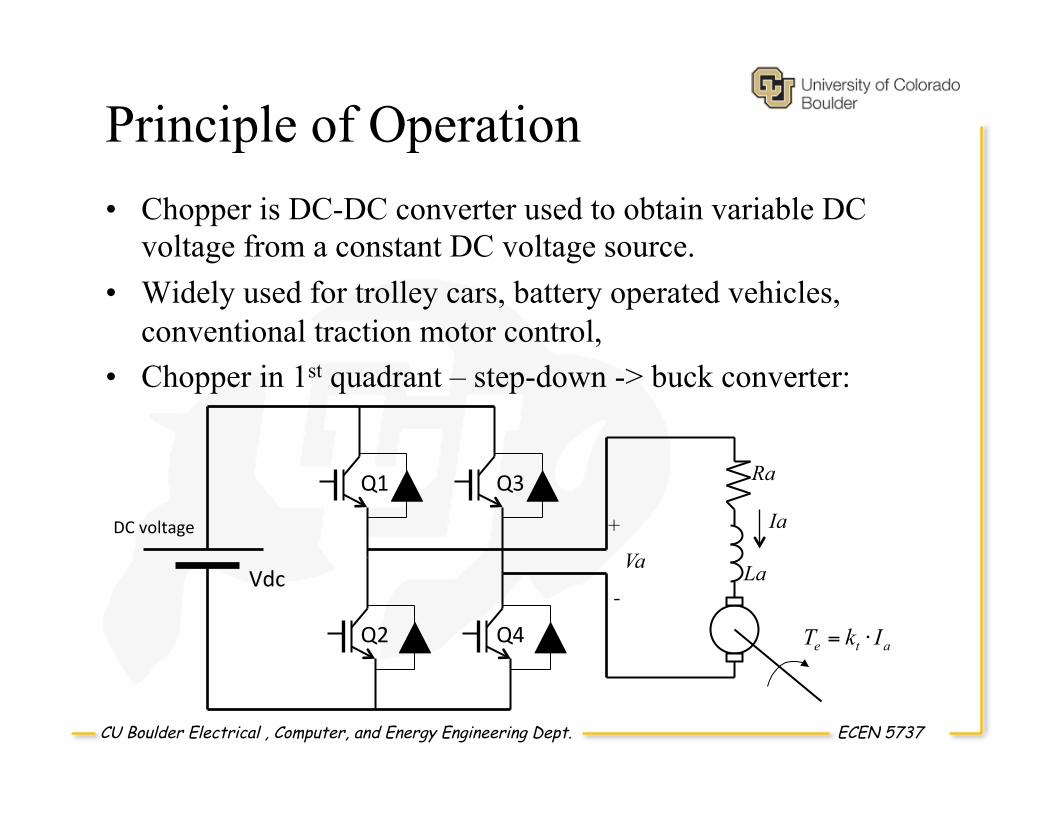
• Chopper in 1st quadrant – step-down -> buck converter:
Q1 Q3
Q2 Q4
Vdc
DC voltage
ate IkT ⋅=
Ia
Ra
La Va
+
-
• Chopper is DC-DC converter used to obtain variable DC voltage from a constant DC voltage source.
• Widely used for trolley cars, battery operated vehicles, conventional traction motor control,
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
Principle of Operation
Q1
Q4 Vdc
ate IkT ⋅=
Ia Ra
La Va +
-
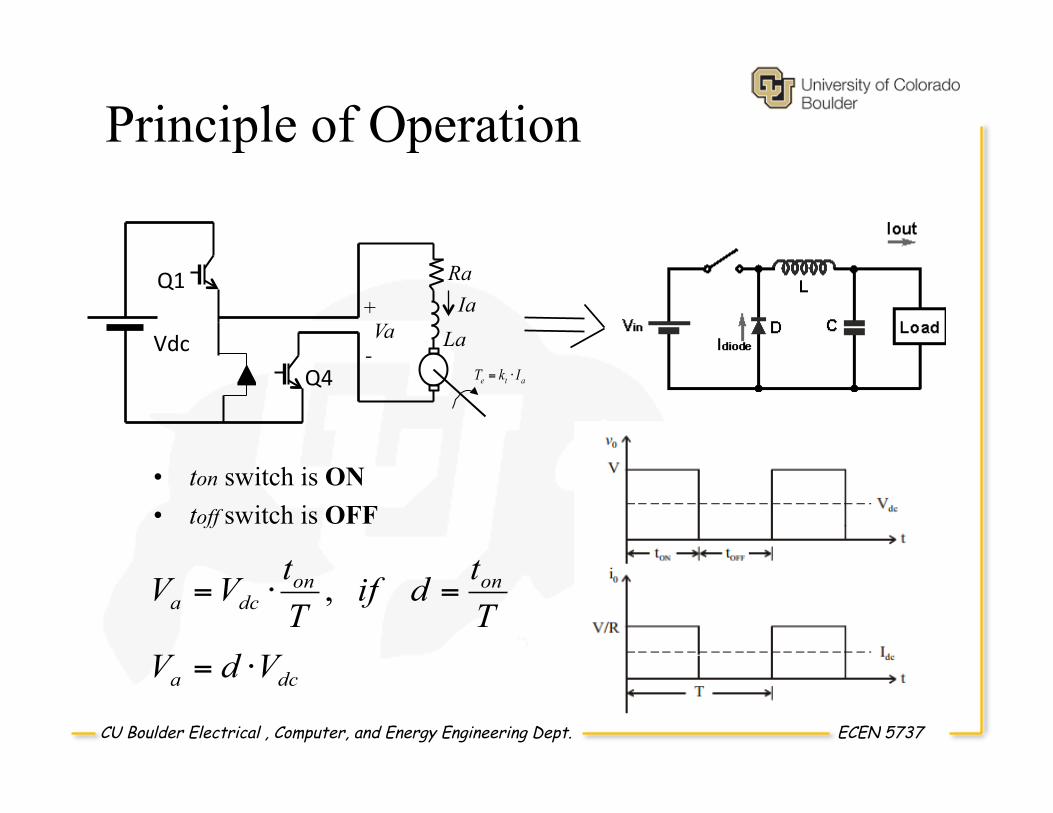
• ton switch is ON • toff switch is OFF
dca
onondca
VdVTtdif
TtVV
⋅=
=⋅= ,
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
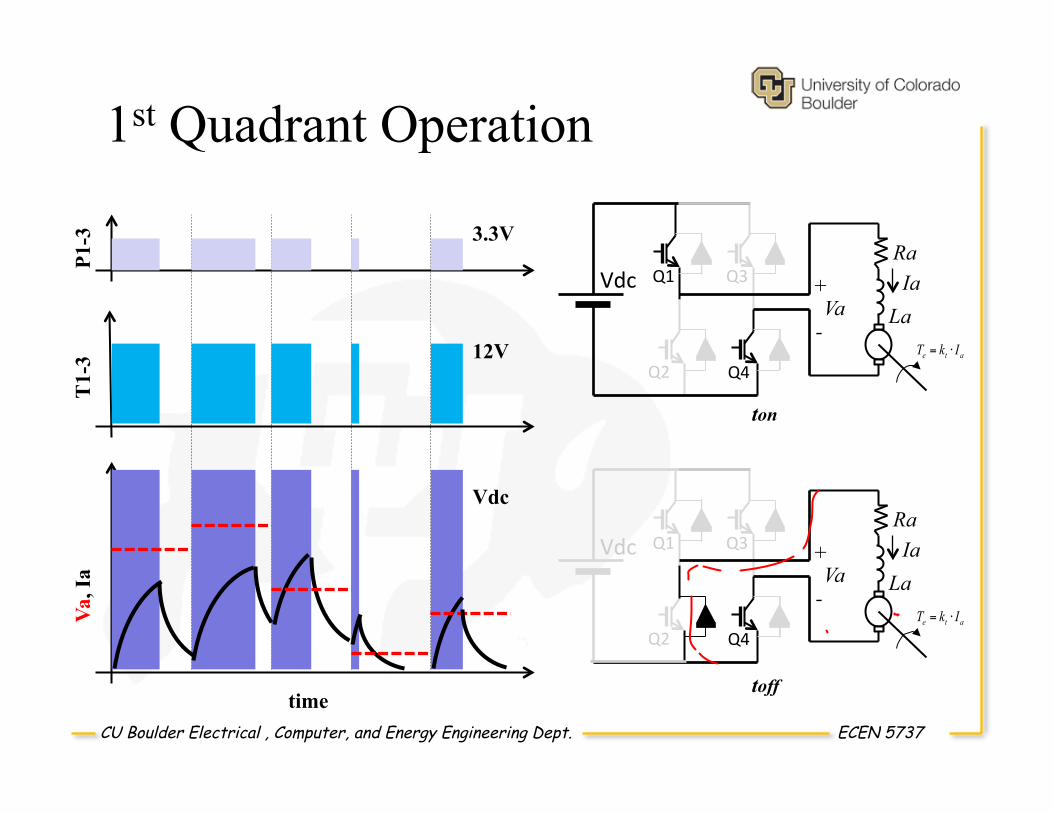
1st Quadrant Operation P1
-3
T1-
3 Va
, Ia
time
3.3V
12V
Vdc
Q1 Q3
Q2 Q4
Vdc
ate IkT ⋅=
Ia Ra
La Va +
-
Q1 Q3
Q2 Q4
Vdc
ate IkT ⋅=
Ia Ra
La Va +
-
ton
toff
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
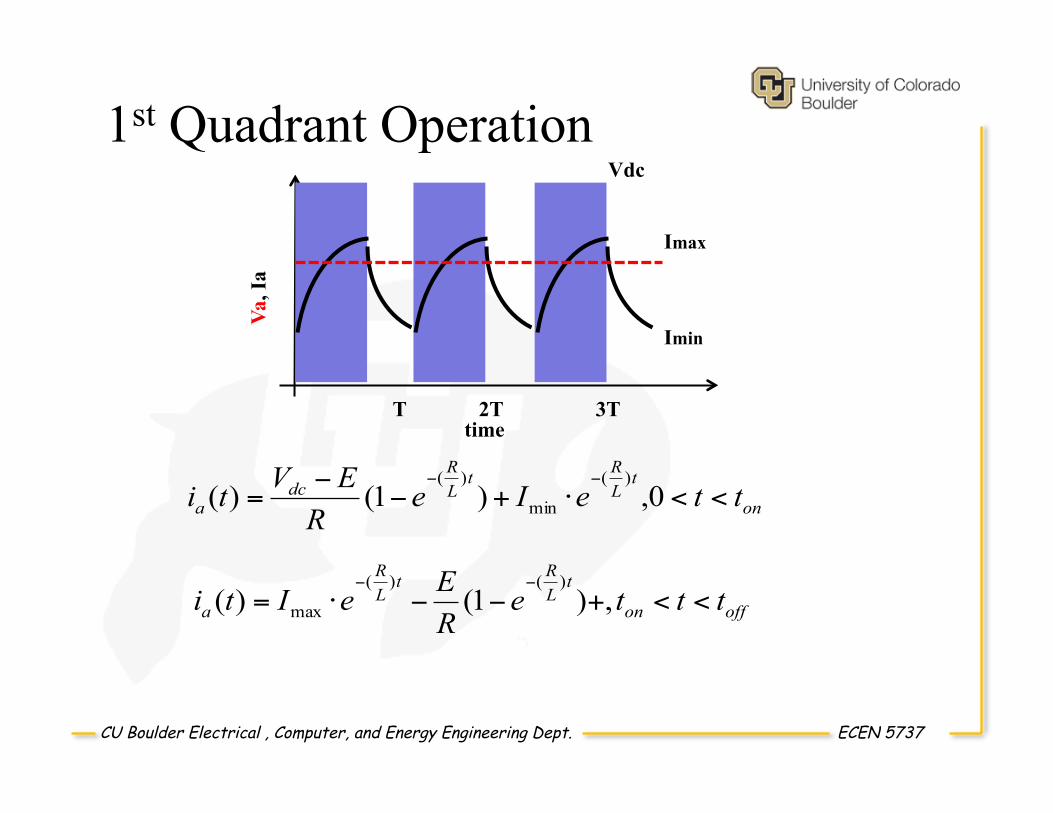
1st Quadrant Operation
Va, I
a
time
Vdc
on
tLRt
LR
dca tteIe
REVti <<⋅+−
−=
−−0,)1()(
)(
min
)(
offon
tLRt
LR
a ttteREeIti <<+−−⋅=
−−,)1()(
)()(
max
Imin
Imax
T 2T 3T
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
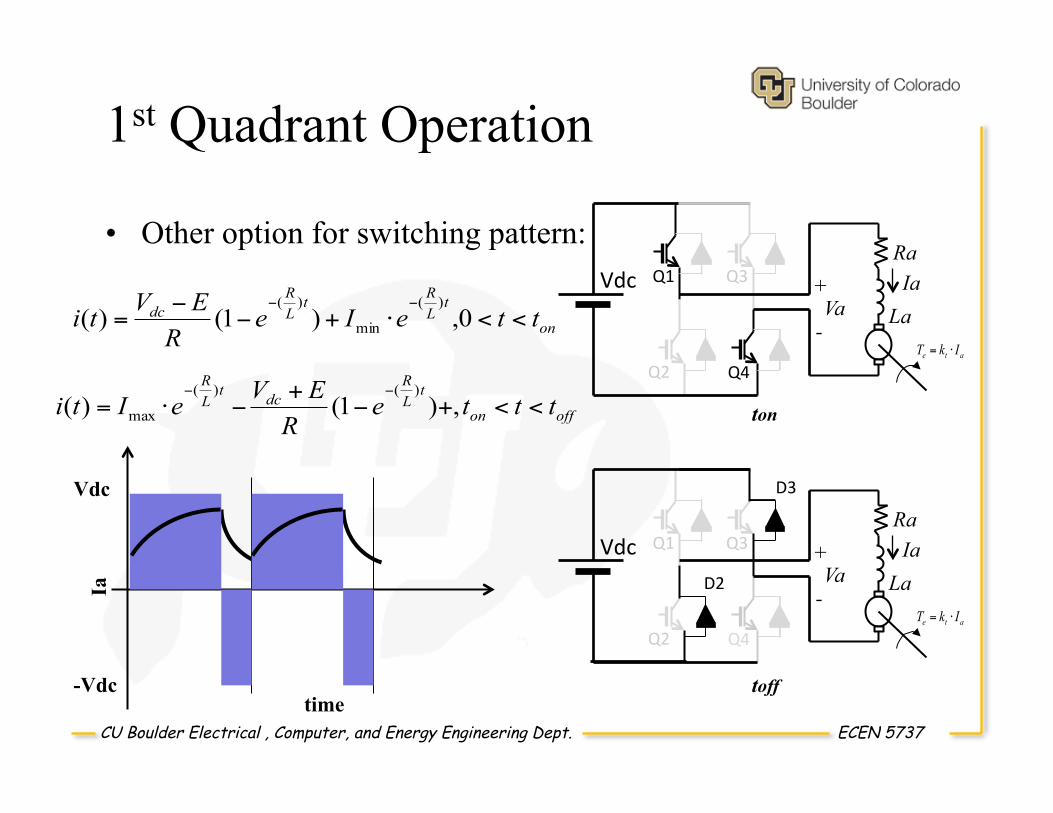
1st Quadrant Operation
• Other option for switching pattern: Q1 Q3
Q2 Q4
Vdc
ate IkT ⋅=
Ia Ra
La Va +
-
Q1 Q3
Q2 Q4
Vdc
ate IkT ⋅=
Ia Ra
La Va +
-
ton
toff
D2
D3
on
tLRt
LR
dc tteIeREVti <<⋅+−
−=
−−0,)1()(
)(
min
)(
time
offon
tLR
dctLR
ttteREVeIti <<+−
+−⋅=
−−,)1()(
)()(
max
Ia
Vdc
-Vdc
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
1st Quadrant Operation
• Drawbacks of the other option for switching pattern: – Switching losses double – 2 power devices are turned off,
not only one – Higher DC voltage deteriorates the machine – Higher rate of change of current - vibrations – Switching harmonic current is higher
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
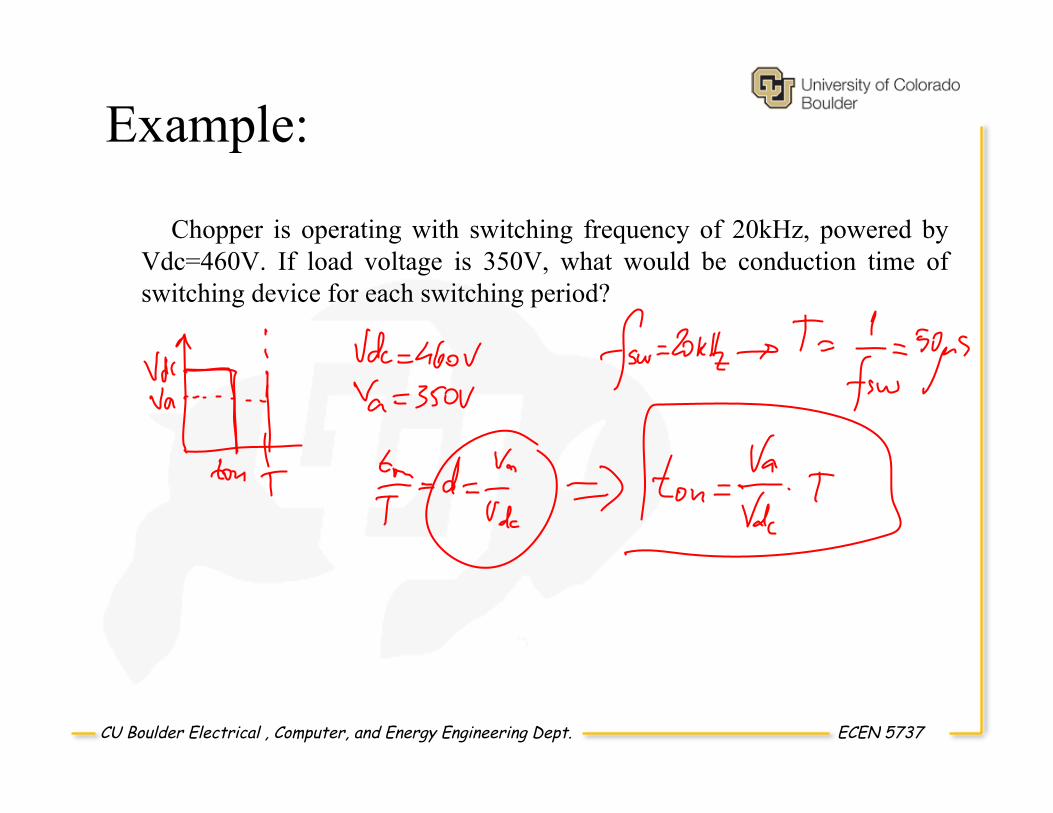
Example:
Chopper is operating with switching frequency of 20kHz, powered by Vdc=460V. If load voltage is 350V, what would be conduction time of switching device for each switching period?

ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
CCM vs. DCM
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
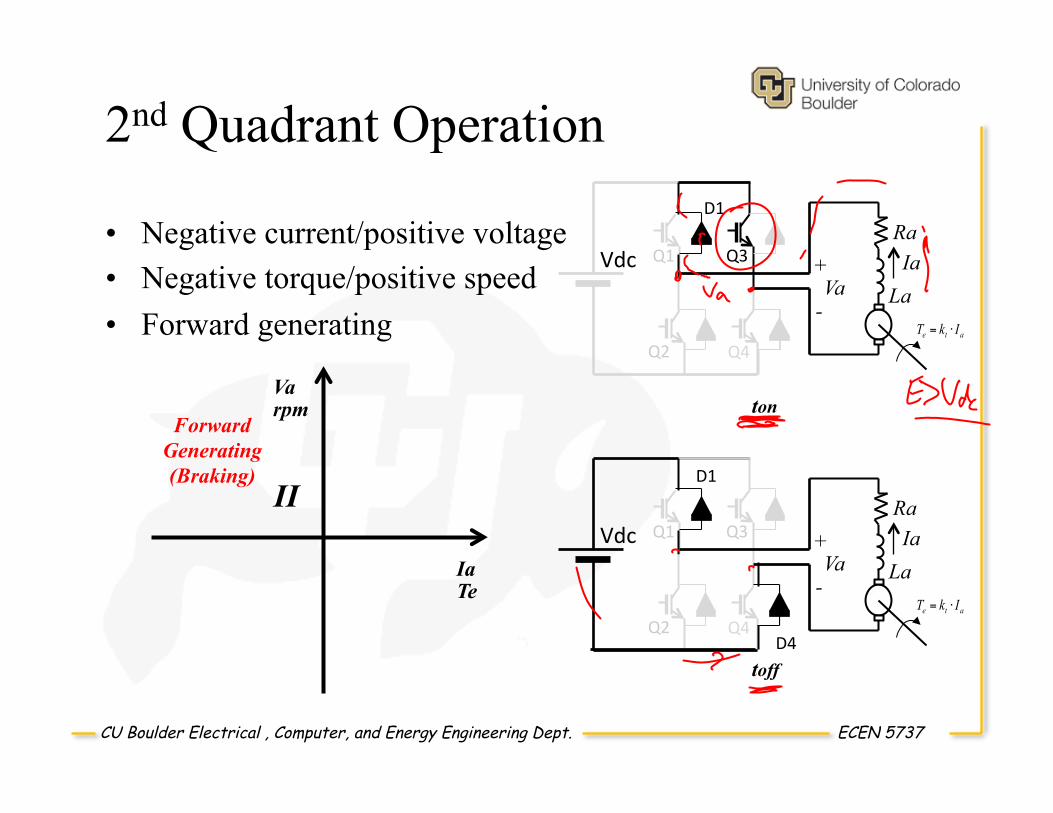
2nd Quadrant Operation
• Negative current/positive voltage • Negative torque/positive speed • Forward generating
Va
Ia
rpm
Te
II
Forward Generating (Braking)
ton
Q1 Q3
Q2 Q4
Vdc
ate IkT ⋅=
Ia Ra
La Va +
-
D1
Q1 Q3
Q2 Q4
Vdc
ate IkT ⋅=
Ia Ra
La Va +
-
toff
D1
D4
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
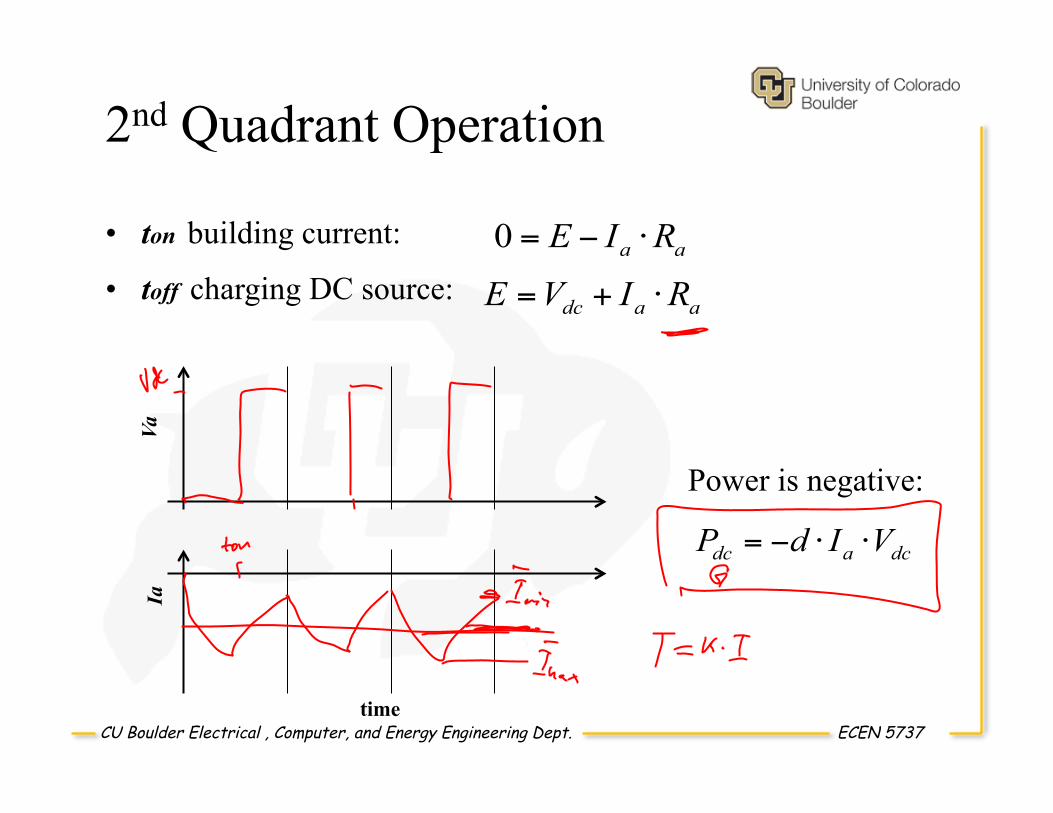
2nd Quadrant Operation
aadc RIVE ⋅+=
• ton building current: aa RIE ⋅−=0• toff charging DC source:
Ia
time
Va
dcadc VIdP ⋅⋅−=
Power is negative:
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
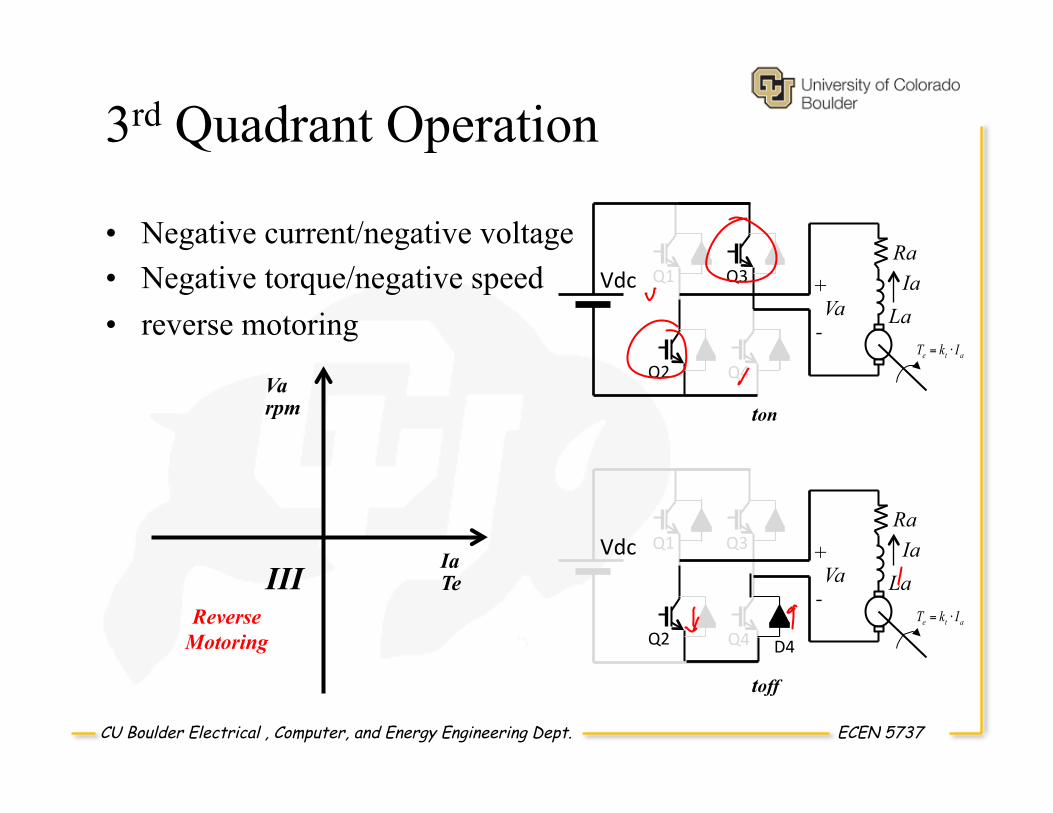
3rd Quadrant Operation
• Negative current/negative voltage • Negative torque/negative speed • reverse motoring
Va
Ia
rpm
Te III Reverse
Motoring
Q1 Q3
Q2 Q4
Vdc
ate IkT ⋅=
Ia Ra
La Va +
-
ton
toff
Q1 Q3
Q2 Q4
Vdc
ate IkT ⋅=
Ia Ra
La Va +
-
D4
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
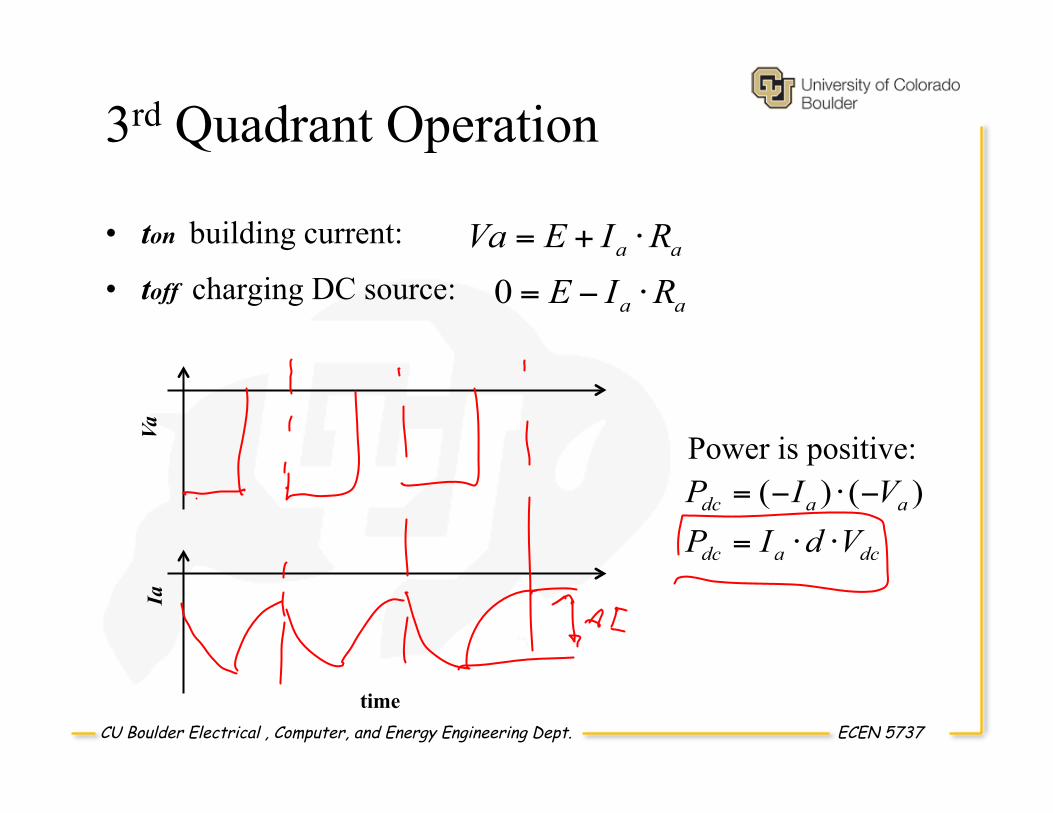
3rd Quadrant Operation
aa RIEVa ⋅+=• ton building current:
aa RIE ⋅−=0• toff charging DC source:
Ia
time
Va
dcadc
aadc
VdIPVIP
⋅⋅=
−⋅−= )()(Power is positive:
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
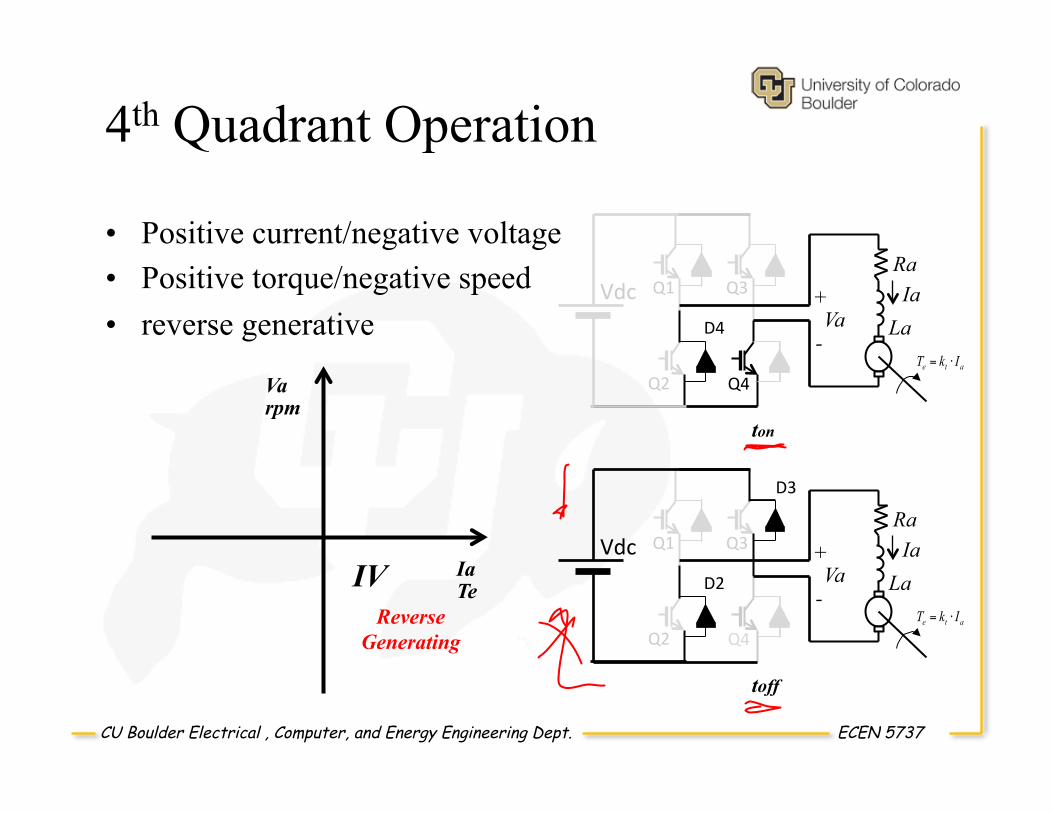
4th Quadrant Operation
• Positive current/negative voltage • Positive torque/negative speed • reverse generative
Q1 Q3
Q2 Q4
Vdc
ate IkT ⋅=
Ia Ra
La Va +
-
ton
Va
Ia
rpm
Te IV Reverse
Generating
Q1 Q3
Q2 Q4
Vdc
ate IkT ⋅=
Ia Ra
La Va +
-
toff
D4
D2
D3
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
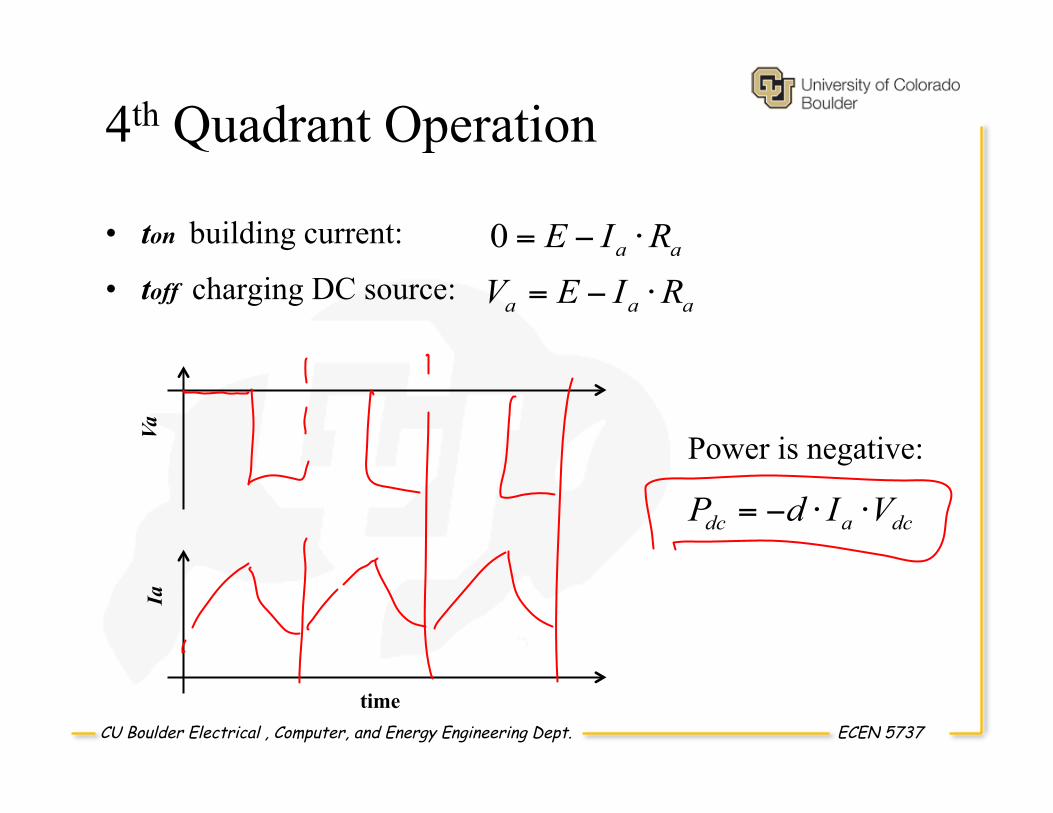
4th Quadrant Operation
aa RIE ⋅−=0• ton building current:
aaa RIEV ⋅−=• toff charging DC source:
Ia
time
Va
dcadc VIdP ⋅⋅−=
Power is negative:
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
Four Quadrant Operation
• Robotics/hybrid-electric vehicles (control start and stop) • Machine is operating at certain speed that need to be brought to zero:
a) Cut-off power supply and rotor will eventually stop b) Make machine work as generator, and decrease (control) the speed, save
energy – recuperative braking • In this case drive operates in I and II quadrant • Some machine tools require rotation in both directions - I and III quadrant
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
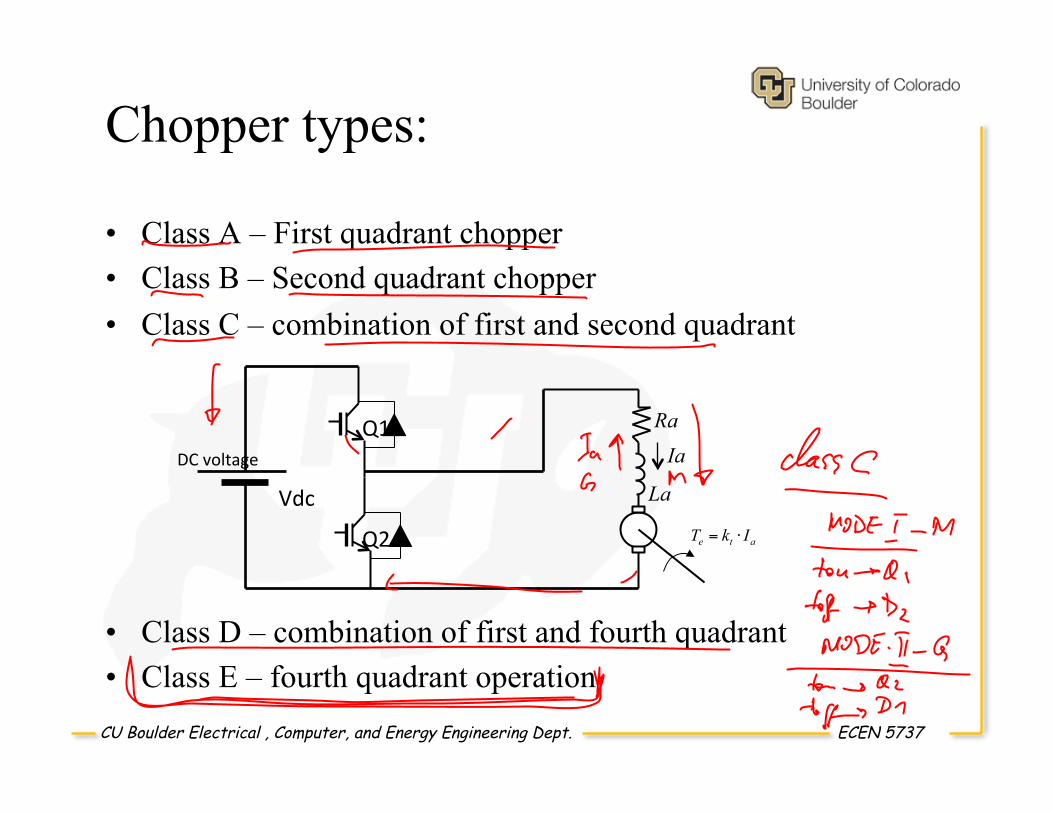
Chopper types:
• Class A – First quadrant chopper • Class B – Second quadrant chopper • Class C – combination of first and second quadrant
Q1
Q2
Vdc
DC voltage
ate IkT ⋅=
Ia Ra
La
• Class D – combination of first and fourth quadrant • Class E – fourth quadrant operation
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
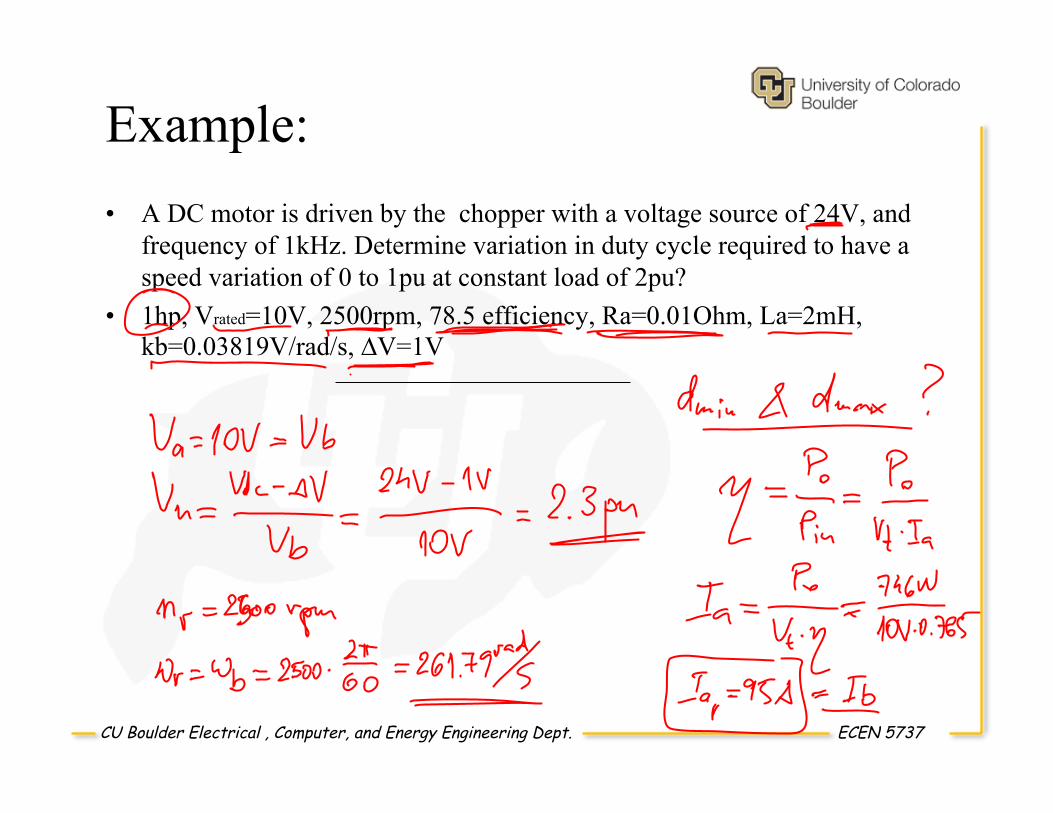
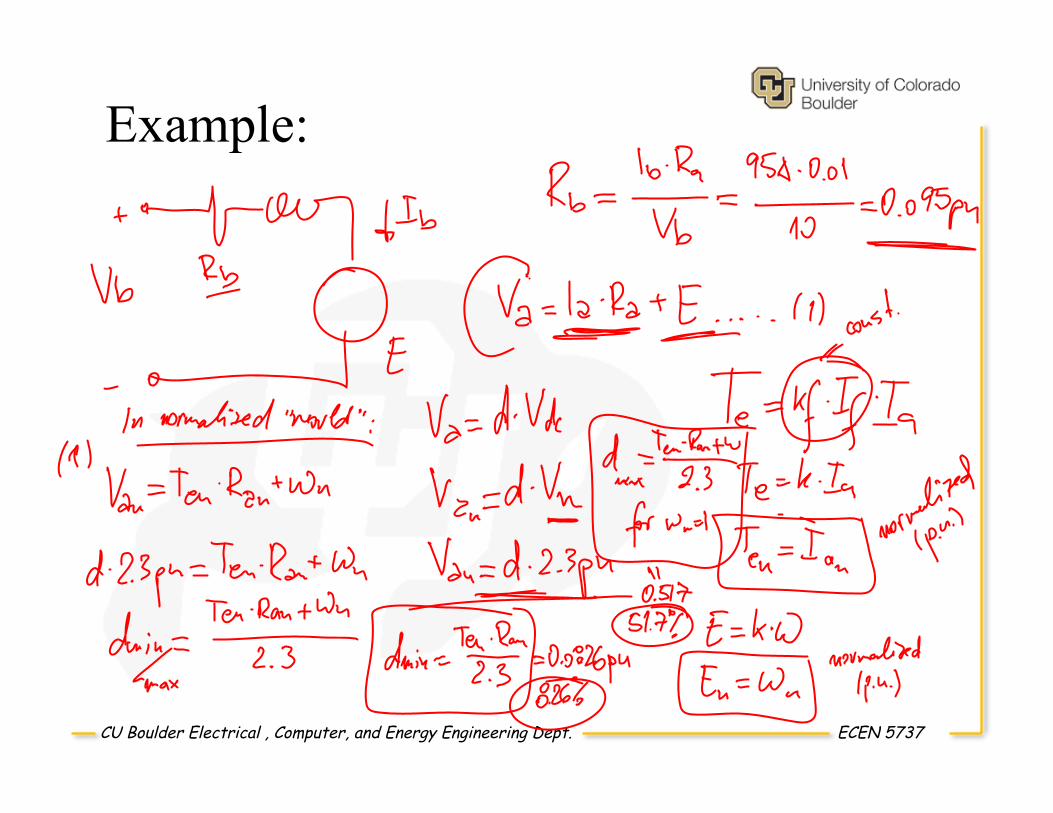
Example:
• A DC motor is driven by the chopper with a voltage source of 24V, and frequency of 1kHz. Determine variation in duty cycle required to have a speed variation of 0 to 1pu at constant load of 2pu?
• 1hp, Vrated=10V, 2500rpm, 78.5 efficiency, Ra=0.01Ohm, La=2mH, kb=0.03819V/rad/s, ∆V=1V
ECEN 5737 CU Boulder Electrical , Computer, and Energy Engineering Dept.
Example:























![El Destino de Diez [ECEN]](https://img.dokumen.tips/doc/110x75/563db877550346aa9a93f1f9/el-destino-de-diez-ecen.jpg)





