Embed Size (px)
Citation preview
ECE 4524 Artificial Intelligence and EngineeringApplications
Lecture 22: Introduction to LearningReading: AIAMA 18.1-18.3
Today’s Schedule:
I Motivation for Learning
I Types of Learning
I Supervised Learning and Hypothesis spaces
I Example: Decision Trees
Why learning?
I not all information is known at design time
I it might be impractical to program all possibilities directly
I some agents need to be able to adapt over time
I we might not know how to solve a problem directly by design
This area in general is referred to as Machine Learning.
Learning is a very general concept.
It can be applied to all elements of an agents design, e.g. we might
I learn functions mapping percepts to internal states
I learn functions mapping states to actions
I learn the agent model itself
I learn probabilities
I learn utilities of internal states or actions
Any agent component with a representation, prior knowledge ofthe representation, and a way to update the representation usingfeedback can use learning methods.
Categorization of Learning
The most basic distinction in learning is the difference between
I Deductive Learning
I Inductive Learning
Within inductive learning there is
I unsupervised learning
I reinforcement learning
I supervised learning
Supervised Learning
Supervised learning is conceptually very simple, but has manypractical and subtle issues.
I Given a training set consisting of examplesD = {(x1, y1), (x2, y2), · · · , (xn, yn)} where each exampleobeys
yi = f (xi )
for some unknown function f (·).I Find a function, the hypothesis h(·)
y = h(x)
that approximates the true f .

The quality of the approximation is measured using theTest Set.
T = {(x1, y1), (x2, y2), · · · , (xm, ym)}
where m < n and T ∩ D = ∅I Collecting training and testing sets is often hard and expensive
I a h that performs well on the test set is said to generalize well.
I an h that performs well on the training set (said to beconsistent) but poorly on the test set is said to beover-trained.
Note the test set is independent of the training set!
Some Nomenclature
I When y is finite with a categorical interpretation, this is aclassification problem
I If y is binary it is a binary classification problem
I If y is continuous then it is a regression problem.
Hypothesis Space
In y = h(x), h is a hypothesis in some space of functions H.
I Goal is to find a consistent h with smallest testing error andthe simplest representation (Ockham’s Razor)
I If we restrict the space H then it may be that no h can befound which approximates f sufficiently (unrealizable).
I The complexity/expressiveness of H and the generalization ofh ∈ H is related through the bias-variance dilemma.

Bayesian analysis gives us a useful framework forsupervised learning
I Let h ∈ H be parameterized by θ, and the training data givenby D, then the posterior of the parameters is
p(θ|D, h) =p(D|θ, h)p(θ|h)
P(D|h)
I The posterior of the model is the evidence for h
p(h|D) =p(D|h)p(h)
P(D)
where the denominator integrates over all models in H
Bayesian analysis gives us a useful framework forsupervised learning
I The maximum likelihood model ignores the prior over models
argmaxh
P(D|h)
and is the model with the most evidence.
I The maximum a-posteriori (MAP) model includes the priorover models
argmaxh
p(h|D) = argmaxh
p(D|h)p(h)()
where the denominator P(D) is common to all models and soirrelevant to the model selection.
We can also average models by choosing the top models ratherthan a single model. This is particularly useful in binaryclassification, where the models can simply vote on the finalclassifier output.
Utility of models
I We assume the true f(x) is stationary and samples are IID.
I The error rate is the proportion of incorrect classifications.
I Note the error rate may be misleading since it makes nodistinction about utility differences. Example: Binary classifierhas 4 cases: TP, FP, TN, FN
I The cost of a FP or TN may not be the same.
I This is accounted for via a utility/loss function.
Sources of Model Error
I The estimated h may differ from the true f because
1. the space H is overly restrictive (unrealizable)2. the variance is large (high degrees of freedom)3. f itself may be non-deterministic (noisy)4. f is ”too complex”
I Most of Machine Learning has been focused on 1 and 2.
I A large open area in machine learning now is 4, ”learning inthe large” (e.g. neuroscience, bioinformatics, sociology,networks)
An example learning method: Decision Trees
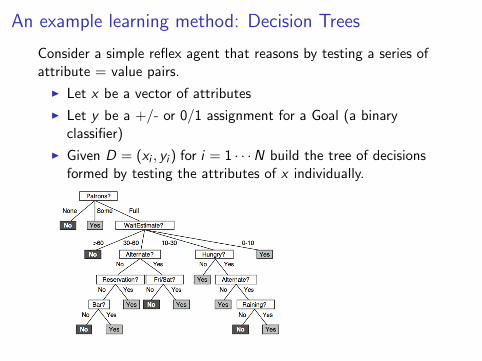
Consider a simple reflex agent that reasons by testing a series ofattribute = value pairs.
I Let x be a vector of attributes
I Let y be a +/- or 0/1 assignment for a Goal (a binaryclassifier)
I Given D = (xi , yi ) for i = 1 · · ·N build the tree of decisionsformed by testing the attributes of x individually.

Implementing the importance function
The idea is that we want to select the attribute that maximizes our”surprise”
I The entropy of a R.V. V with values vk measures it’suncertainty
H(V ) = −∑k
p(vk) log2(p(vk)) in bits
I For a Boolean R.V. with probability of true = q the Entropy is
B(q) = −(q log2 q + (1− q) log2(1− q))
where q ≈ p/(p + n) for p positive and n negative samples.

Implementing the importance function
Now suppose we choose attribute A from x
I For each possible value of A we divide the training set into ksubsets with pk positive and nk negative examples
I After testing A, the remaining entropy is
remainder(A) =d∑
k=1
pk + nkp + n
B
(pk
pk + nk
)I The information gain associated with selecting A is then
gain(A) = B
(p
p + n
)− remainder(A)
We choose the attribute with the highest gain in information.

Next Actions
I Reading on Learning Theory (AIAMA 18.4-18.5)
I No warmup.
Reminders:
I Quiz 3 will be Thurday 4/12.
I PS 3 is due tonight.





















![4524 Task 3796 Presentation Innovation[1]](https://img.dokumen.tips/doc/110x75/5447ae9eb1af9f0f098b4768/4524-task-3796-presentation-innovation1.jpg)






