Embed Size (px)
Citation preview

EAR: An Energy and Activity AwareRouting Protocol for Wireless SensorNetworks in Smart Environments
Debraj De†1, Wen-Zhan Song‡1, Shaojie Tang[2 and DianeCook∗3
1Sensorweb Research Laboratory, Department of Computer Science, Georgia State University,Atlanta, GA, USA.
2Department of Computer Science, Illinois Institute of Technology3Artificial Intelligence Laboratory, School of Electrical Engineering and Computer Science,
Washington State University
Email: †[email protected], ‡[email protected], [[email protected] ∗[email protected]
Sensor network, unlike traditional communication network, is deeply embeddedin physical environments and its operation is mainly driven by the event activitiesin the environment. In long-term operations, the event activities usually showcertain patterns which can be learned and exploited to optimize network design.However, this has been underexplored in the literature. One work related tothis is using ATPG for radio duty cycling ([1]). In this paper we present a novelEnergy and Activity aware Routing (EAR) protocol for sensor networks. As a casestudy, we have evaluated EAR with the data trace of real Smart Environments.In EAR an Activity Transition Probability Graph (ATPG) is learned and built fromthe event activity patterns. EAR is an online routing protocol, which chooses thenext-hop relay node by utilizing: activity pattern information in the ATPG graphand a novel index of energy balance in the network. EAR extends network lifetimeby maintaining an energy balance across the nodes in the network, while meetingapplication performance with desired throughput and low data delivery latency.We theoretically prove that: (a) the network throughput with EAR achievesa competitive ratio (i.e., the ratio of the performance of any offline algorithmthat has knowledge of all past and future packet arrivals to the performance ofour online algorithm) which is asymptotically optimal, and (b) EAR achieves alower bound in network lifetime. Extensive experimental results from: (a) 82node Motelab sensor network testbed [2] and (b) varying size network (20-100) insensor network simulator TOSSIM, validate that EAR outperforms the existingmethods both in terms of network performance (network lifetime, network energyconsumption) and application performance (low latency, desired throughput) for
an energy-constrained sensor network.
Keywords: Routing; activity-aware; energy balance; Atkinson Index; competitive ratio;wireless sensor networks; smart environments
1. INTRODUCTION
Unlike traditional communication networks, sensornetworks are deeply embedded in physical environmentsto provide high degree of visibility into environmentalphysical processes. Its data generation operation ismainly driven by the physical event activities in theenvironments. Here, by activity we mean the eventsthose are sensed and reported by the sensor nodes tobase station (sink) node. For example, in a smarthome environment, the detected motion events of theresidents constitute activities.
Figure 1 shows the event activities detected and
reported by a node (in a 30 node smart workplace sensornetwork deployed across a floor) with motion sensorand corresponding node energy consumption. Throughobservation, it is clear that node energy consumption(thus node operations) is strongly correlated to theevent activities. In long-term operations, theseactivities usually show certain periodic patterns (e.g.Figure 2), which can be learned and exploited tooptimize network design. However, this has beenunderexplored in the literature. In this paper wepresent a novel Energy and Activity aware onlineRouting (EAR) protocol for sensor networks. EAR canadapt its network operations based on learned activity
The Computer Journal, Vol. ??, No. ??, ????

2 Debraj De et al.
FIGURE 1. Event activity detected and reported by nodewith motion sensor in smart workplace, and correspondingenergy consumption pattern of sensor node
patterns and an index of balance in node remainingenergy in the network.
Triggering rate of a motion sensor in bedroom
Triggering rate of a motion sensor in dining room
Time of Day (00:00 - 23:59)
FIGURE 2. 24-hour activity pattern in bedroom anddining room of CASAS Smart Home testbed [3]
In this paper, we use Smart Environments (such asSmart Home [4] [3], Smart Workplace etc.) as anapplication case study. Figure 2 shows the daylongaverage triggering rate of two motion sensors (indifferent rooms) in CASAS Smart Home testbed [3].The triggering rates for two motion sensors, one inbedroom and another in dining room, are calculatedusing 24 hour data of 57 days. It can be observedthat the amount of sensing data generated in thenetwork is driven by event activities and their patternsof occurrence. There are distinct activity patterns thatvary in time (say, throughout a day) and space (say,bedroom vs. living room). This means at different time,the activity patterns in the same space are different,and at the same time the activity patterns at differentspace are also different. With such pattern the set ofactive data sources in the network changes in context oftime and space. This leads to significantly non-uniformenergy consumption of nodes across the network,resulting in severe imbalance in remaining energy ofthe nodes across the network. But if the activity
patterns are utilized in form of activity-awareness, thenit is possible to optimize network operations and thussignificantly improving performance.
Motivated by this observation, we design aninnovative activity-aware and energy-balanced onlinerouting protocol. EAR protocol aims to maximizethe network lifetime (defined as the time till firstnode depletes its energy), while meeting applicationdata throughput requirement with low data deliverylatency, without making any assumptions on futuremessage arrivals. EAR tends to route packets throughnodes with: larger remaining energy, neighborhoodwith larger balance in remaining energy, and relativelyless sensing and data processing.
We theoretically prove that EAR achieves a lowerbound in network lifetime. Also, the networkthroughput with EAR achieves a competitive ratio (i.e.,the ratio of the performance of any offline algorithmthat has knowledge of all past and future packet arrivalsto the performance of our online algorithm), whichis asymptotically optimal. Extensive experimentalresults on large scale 82 node Motelab real testbedand sensor network simulator TOSSIM (with CASASsmart home [3] event activity data trace) validate thatEAR outperforms the existing methods both in termsof network performance (network lifetime, networkenergy consumption) and application performance (lowlatency, desired throughput) for an energy-constrainedsensor network.
The rest of the paper is organized as follows. Insection 2 we have discussed the related works. Insection 3 we have presented our EAR routing protocolin details. In section 4 we have presented theoreticalanalysis of EAR performance. Then in section 5 wehave evaluated the system performance of EAR on thebasis of experimental results. Finally we conclude insection 6 with discussion on possible future work.
2. RELATED WORK
To best of our knowledge, activity-aware routingis almost an unexplored area in the literature.Some relevant works on energy-balanced or lifetime-maximized routing design issues include [5], [6], [7]. Thework in [5] has formulated the lifetime maximizationproblem as a linear program and has solved it usingdistributed heuristics technique. But this work assumesthat the message generation rate at nodes are fixedand known. In [6] the observation has been made thatthe linear program is equivalent to that of a maximumconcurrent flow problem. The algorithms proposedin [5] and [6] are able to determine how the traffic(generated at a constant rate) should be split amongthe different routes in order to maximize the networklifetime. Since the traffic generation rates are assumedto be constant and known in these works, the networkcan solve the energy aware routing problem off-line.The work in [8] converts the maximum network lifetime
The Computer Journal, Vol. ??, No. ??, ????

An Energy and Activity Aware Routing Protocol for Wireless Sensor Networks 3
problem into a utility-based nonlinear optimizationproblem and proposes a distributed routing algorithmto solve the problem. But this work also assumes thatthe data generation rate at each node is fixed and knownin advance. But sensor networks are majorly drivenby activities. Therefore the data generation rates atnodes are usually non-uniform and not known exactlyin advance. Our proposed protocol EAR uses this morerealistic view.
For many practical applications (for example smartenvironment activity detection sensor networks) themessage generation rate at different nodes are non-uniform and also dynamic. Therefore there isno complete advance knowledge of future messagegeneration process. This problem needs to be solvedwith online routing protocol which does not need toknow the message generation rates. Our proposedEAR is an online routing protocol. An online routingalgorithm max-min zPmin is proposed in [7] for networklifetime maximization and it provides a competitiveanalysis. CMAX [9] proposes an algorithm thattries to maximize the network capacity using shortestpath computation with routing metric based on noderemaining energy. The work in [10] proposes E−WMEonline routing algorithm for the scenario of energyharvesting sensor nodes. Most of these energy awareonline routing algorithms are based on remaining energyof relaying nodes. Unlike our proposed online routingprotocol EAR, these works don’t try to maintain energybalance in the network as a whole, and don’t learn fromactivity patterns. In this paper we have consideredthe issue of energy balance across the network. Anenergy-welfare index (using Atkinson Inequality Index)is utilized in [11] to keep energy balance in network.But the forwarder selection procedure is complex andexpensive (computing the index for each forwarder foreach packet). Also there is no theoretical analysis of itsproposed routing. The energy balance index in EAR islocalized and simple to compute. We have also providedtheoretical performance analysis of EAR. Also to notethat, for the goal of maximizing network lifetime onepossible solution may be to route the messages along thepath with the maximal minimal fraction of remainingenergy (the max-min routing). The performance ofmax-min path can degrade in situations (as describedwith some example in [7]). Another issue with the max-min routing is that following route with max-min energynode may be expensive compared to other possiblepaths. For large number of data streams there can besignificant energy consumption for common nodes onmax-min routing paths. This creates bottleneck nodeswith high energy consumption and thus degrades thenetwork lifetime quickly.
There are some works on activity-aware or context-aware networking. The work of ActSee ([1]) proposesan activity-aware radio duty cycling protocol thatutilizes the learned event activity pattern informationto intelligently adjust radio duty cycles in wireless
TABLE 1. List of symbols usedEi Initial energy of node i
Ei(k) residual energy of node i before routing message k
sk, dk, lk Source, destination and size of message k
cij energy required by node i to send unit size data to j
ptr(x, y) probability of activity transition from node x to y
ttr(x, y) predicted activity transition delay from node x to y
CL(i) activity cluster of node i
sensor networks. The work in [12] presents a proactivecommunication algorithm for context aware sensornetwork. A framework for integrated unicast andmulticast routing in context-aware ordered meshes ispresented in [13]. But utilizing activity awareness forenergy efficient and resource optimizing networking isnot explored in these works, while EAR attempts theseissues in depth.
3. ENERGY AND ACTIVITY AWAREROUTING
We first introduce system models and formal problemdefinitions, then we describe EAR protocol in details.
3.1. Preliminaries
The symbols used in EAR are listed in Table 1.
event
eventActive Cluster
Active Cluster
Predicted Cluster
Predicted Cluster
Predicted ClusterPredicted
Cluster
routing pathactivity transition
Sink
Inactive Cluster
FIGURE 3. Illustration of activity patterns and datageneration in network.
Learning Activity Patterns: Figure 3 illustratesthe event activity patterns and data generation in asensor network in smart environments. Based on thecontext of event activities, the nodes in the networkat any moment belong to one of the three types ofclusters (set of sensor nodes): Active Cluster (where theevent activities are occurring in current time period),Predicted Cluster (predicted to be in active cluster innext time period), Inactive Cluster (with no activity incurrent period and no predicted activity in next timeperiod). The membership of nodes being in clusterschanges with time according to an Activity TransitionProbability Graph (ATPG). In such a graph, theedge from node x to node y denotes the transition
The Computer Journal, Vol. ??, No. ??, ????

4 Debraj De et al.
tuple < ptr(x, y), ttr(x, y) >, where ptr(x, y) is thepredicted activity transition probability and ttr(x, y)is the predicted activity transition delay, for transitionof activity from x-th cluster to y-th cluster. To notethat the nodes in Active Clusters will be involved inactivity detection and computation, followed by sendingthe data to base station node. Therefore it will be betterto avoid involving nodes in Active or Predicted clustersas data forwarder. The nodes with higher probability ofbeing in inactive clusters can be more involved in dataforwarding task. This will save some energy (of dataforwarding) for active nodes, and will also save someMCU computation resource for the node’s own tasks(such as activity detection, processing, communicationetc.).
System Model: The energy cost of sleep stateis much lower than that of transmitting/receivingstate. The energy consumption is considered only fortransmitting/receiving state in our system model. Thenode overhear energy consumption model is used invarious earlier works (e.g. in [14]). The sensor networkis considered as a graph G=(V,E), where V is the setof nodes and E is the set of edges. Let n=|V | be thenumber of nodes. Each node i starts with initial energyEi. The source and destination of message k (of size lk)are denoted as sk and dk respectively. In data collectionscenario, dk is always the base station. Now suppose inmulti-hop routing, node i decides to forward message kto node j through link ij. Then node i consumes cijenergy per unit length of data, therefore consuming atotal lk.cij amount of energy for transmitting messagek.
Objective: The design objective of EAR is to meetapplication performance requirement (e.g., throughputand delay) while maximizing network lifetime, byutilizing the activity pattern information in ATPGgraph.
3.2. Algorithm and Protocol Design
Activity Detection and Analysis
Application
activity dataActivity
Awareness
sensor networks
FIGURE 4. Activity-awareness for sensor network.
Distribution of Computation in EAR: The activity-awareness in sensor network is used in EAR as shownin Figure 4. The event detection data in network iscollected at base station node for application purpose,and also used for constructing activity patterns in formof ATPG. Then the ATPG information is disseminatedback into the network once. Now until a node dies, ora new node is added, or the activity pattern changes(that can happen only in long time period, typicallyat least several days, in smart environments), theATPG information stored in the nodes is not changed.Therefore, the networkwide dissemination of ATPGinformation is performed rarely. Thus there is minimumcommunication overhead. The activity pattern analysisis only done in base station. All other calculationsinvolved in EAR are distributed and localized. Soall computations, except activity pattern analysis aredistributed and localized in the network.
FIGURE 5. Activity Transition Probability Graph (in-cluding both significant and negligible transition probabili-ties) generated from the CASAS Smart Home testbed withlayout shown in Figure 6.
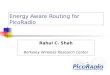
Building and Maintaining ATPG: As a casestudy, we calculated an ATPG graph based on sensedevents in CASAS [3] smart home testbed. Theprobability of transition between two sensor nodes xand y is based on the relative frequency of events atsensor node x followed by events at sensor node y. InATPG, a node is generated for each sensor node thatexists in the environment. The probability associatedwith edge x, y is estimated using the formula in equation1. The example ATPG with both significant andnegligible transition probabilities is shown in Figure 5.The revised ATPG with only significant activitytransitions is shown in Figure 6.
p(x, y) =| events for sensor x followed by sensor y |
| events for sensor x |(1)
Activity-Aware Routing Metric: Now wedescribe the notion of activity-awareness in EAR.
The Computer Journal, Vol. ??, No. ??, ????

An Energy and Activity Aware Routing Protocol for Wireless Sensor Networks 5
7
6
32
1 4
58
9
10
11
12
1314
1516
1718
19
20 2122
23
24
25
26 27
Activity Transition Probability Graph (ATPG)
n motion sensor
activity transition
Dining Room
Kitchen
Bedroom
FIGURE 6. Activity Transition Probability Graph(pruned for significant activity transition) learnt from theCASAS Smart Home testbed. The significant transitionprobability for example from node 27 to nodes 14, 25 and26 are 12%, 45% and 40% respectively.
Suppose a node i is trying to forward message k whosesource is node sk, which is in activity cluster CL(sk).Then node i tries to forward the data to some nodej with (a) less computed probability p(CL(sk), CL(j))of being active (given CL(sk) is active) and (b) lessduration of being active (tactive(j))·p(CL(sk), CL(j))can be calculated by summing up the computedprobability along all the paths from node CL(sk) tonode CL(j) in the ATPG. tactive(j) can be calculatedfrom weighted (based on transition probability) activitytransition delay from CL(j) to the next clusters. Letthe period of activity pattern be TP (which is 24hours for smart home environments). Then activity-awareness metric for node j when routing of message kis a(j, k) = p(CL(sk), CL(j))·tactive(j).
p(CL(sk), CL(j)) =∑
P∈CL(sk);CL(j)
∏(xy)∈path P
ptr(x, y) (2)
tactive(j) =
∑q∈N(CL(j)) ptr(CL(j), q).ttr(CL(j), q)
TP(3)
Low computation overhead for activity metric: In realapplication scenario, the nodes don’t need to computethe parameters p(CL(sk), CL(j)) and tactive(j) eachtime. The transition graph information (transitionprobability and duration) can be stored (and updatedif necessary in long time duration) in the nodes inan MxM vector, where M is the number of clustersin the network. This will indicate the values ofp(CL(sk), CL(j)). Based on that matrix, the nodescan save calculated tactive(j) in an 1xM matrix. Sothe nodes can directly access the routing metric a(j, k).This indicates that Activity Awareness metric doesn’t
incur much computation overhead.
FIGURE 7. Distribution of Energy Balance index (B)
Energy-Aware Routing Metric: Now we describethe notion of energy balance in EAR. In order toreach a balance in energy consumption rate across thenetwork we use Atkinson’s Inequality Index [15]. It isa measure of economic income inequality in a society.The index can be turned into a normative measure byimposing a coefficient ε to weight incomes. Greaterweight can be placed on changes in a given portionof the income distribution by choosing ε, the level ofInequality Aversion. The Atkinson index becomes moresensitive to changes at the lower end of the incomedistribution as ε approaches 1. Conversely, as thelevel of inequality aversion falls (ε approaching 0) theAtkinson Index becomes more sensitive to changes inthe upper end of the income distribution. Atkinsonindex A is defined as in equation 4.
A = 1− 1
µ[
1
N
N∑i=1
y(1−ε)i ]1/(1−ε) (4)
Where 0 ≤ ε < 1, yi is the individual income of i-th entity (i = 1, 2, ..., N) and µ is the mean incomeof total N entities. We calculate B=(1 − A) as theenergy balance index which is computed locally in 1-hop neighborhood. So the index of energy balanceBi(k) computed by each node i (before routing of somemessage k) is shown in equation 5. The term ei(k)= Ei(k)/Ei denotes the normalized remaining energybefore routing message k. Ei(k) is the residual energyof node i before routing message k. The neighbor set ofnode i is denotes as N(i). ∆ (={N(i)∪i}) is the set of 1-hop neighbors of node i and the node itself. So the indexBi is calculated using remaining energy information ofthe neighbors and the node i itself. In Figure 7 theeffectiveness of B metric is shown. In a simulatedenvironment in MATLAB with 100x100 sensor networkgrid, each node has maximum 8 neighbors. Only threenodes in the network have energy value of 100. Butother nodes have energy between 500 to 1000. Then thedistribution of locally computed B (with ε=0.8) acrossthe network is shown in Figure 7. It can be observed
The Computer Journal, Vol. ??, No. ??, ????

6 Debraj De et al.
that B is high enough (close to 1) everywhere, exceptin the neighboring region of the nodes with low energy.Therefore in a distributed network B is a meaningfulindicator of region with significant energy imbalance.Lower B indicates higher degree of energy imbalance.
Bi(k) =|∆|∑
j∈∆ ej(k)[
1
|∆|∑j∈∆
ej(k)(1−ε)]1/(1−ε) (5)
The nodes in network maintain the hopcount frombase station based on the default transmission powerlevel. Now for purpose of routing convergence withdelay control, (i) data is forwarded to node with sameor less hopcount, (ii) if data is carried by at most Hforwarders with same hopcount, it has to be forwardednext to a node with strictly lesser hopcount.
Routing Policy: Let messages are indexed inthe order they are generated. Let sk, dk and lkbe the source, destination and length of message k.Suppose Ei(k) is the residual energy of node i whenthe message k is generated but not routed. So Ei(1)is the starting energy Ei for node i. Let the variableαi(k) = 1-(Ei(k)/Ei). Variable Bi(k) is the computedenergy balance index of node i as described before.Bi(k) denotes the degree of energy balance around theneighborhood of node i before message k is routed. Foractivity awareness, the previously introduced parametera(j, k) (= p(CL(sk), CL(j))·tactive(j)) is used wherej ∈ N(i). In the description of the protocol there aretwo constant parameters λ and σ.
Algorithm 1 EAR algorithm
1. Set the weight or routing metric wij for the link ijaswij=cij .a(j, k).(λαi(k) − 1)/Bi(k).2. Find the best path from sk to dk in thegraph with the forwarder node selection methoddescribed. If node i has data packet to for-ward, select node j as its forwarder node as fol-lows:
if hop travel < H thenj = arg min{wiq, q : q ∈ N(i) AND hopcnt(q) ≤hopcnt(i) AND ciq < Ei(k)/lk} ; if hopcnt(j) =hopcnt(i) then hop travel+ = 1 ;
elsej = arg min{wiq, q : q ∈ N(i) AND hopcnt(q) <hopcnt(i) AND ciq < Ei(k)/lk} ; hop travel = 0;
end if
3. Let γk be the cost of the best path found for messagek. Now if γk ≤ σ, then route the message k along thecomputed path, otherwise reject it. To note that γk=∞if no such path is found.
Rationale behind routing policy : Here we explain therationale behind the routing metric chosen. (a) Forthe link ij the weight wij increases with increase in
cij (energy spent by node i for routing message k overlink ij). So routing avoids the links with high messagetransmission cost. (b) wij increases with increasein both p(CL(sk), CL(j)) (i.e. for nodes with moreprobability of being active) and tactive(j) (i.e. for nodeswith more expected active duration). Thus routingtries to select node (as forwarder) with less probabilityof being active and with less activity duration. Thisproperty makes it activity-aware. (c) wij increaseswith increase in the energy utilization αi(k) of nodei. So routing avoids nodes with low normalized residualenergy. (d) Then wij increases with decrease in theenergy balance Bi(k) of node i. So routing avoidsnodes whose neighborhood is relatively out of balance inresidual energy. In addition, to note that in admissioncontrol, setting the value of σ to infinity (then the onlyreasons for rejecting a message is insufficient energy forrouting) has shown results with good performance.
Competitive Ratio in Data Delivery: We nowdescribe the calculated competitive bound for EAR.Let cmax = maxij∈Ecij , cmin = minij∈Ecij , amin =minij∈Ea(j, k) and ρ= cmax
cminamin. Let L(k) be the total
size of messages that is successfully routed by EARtill the arrival of message k. Let Lopt(k) be the totalsize of messages that is successfully routed by optimaloffline algorithm till the arrival of message k. Then theobtained competitive ratio result for EAR is as shownbelow. The detailed proof is provided in section 4.
Theorem 3.1. Suppose λ=2(nρ + 1), ρ= cmaxcminamin
,σ = ncmax and Q is a positive constant. For all mes-sage k, let
lk ≤mini∈V Eicmaxlg(λ)
(6)
then, L(k)Lopt(k)≥
11+Qlg(λ) ∀k
Delivery latency: It can be proved that EAR is a H-hop spanner. TheH factor assures that the routed data,carried through less active nodes and energy balancedneighborhood, is converged to the base station. Itis important to note that EAR actually reduces thedata delivery latency to base station, by routing themthrough less active nodes (nodes less busy with sensing,data processing and forwarding). This is also supportedfrom the experimental results (described later).
Network Lifetime: EAR is also proved in followingtheorem to provide sub-optimal network lifetime.
Theorem 3.2. Let Tear and TML are networklifetime (time till first node dies) for EAR and optimalnetwork lifetime algorithm (algorithm for maximumlifetime) respectively. Then
Tear >TML
∑Sk=1 PMin(smk )∑S
k=1 Patp(smk )+
δ(∑ni=1 E
MLi −
∑ni=1 E
eari )∑s
k=1 Patp(smk )
S is the number of message generated in the periodTP .
∑Sk=1 PMin(smk) is the total energy consumption
for routing S message in TP , when minimum energypath routing scheme is used.
∑Sk=1 Patp(smk) is
The Computer Journal, Vol. ??, No. ??, ????

An Energy and Activity Aware Routing Protocol for Wireless Sensor Networks 7
the total energy consumption for routing S messagein TP , when purely activity-aware routing scheme isused. (
∑ni=1E
MLi −
∑ni=1E
eari ) denotes the difference
between total remaining energy in network after timeTML and Tear. The detailed proof is provided in section4.
Reliable Data Delivery: EAR follows routing metricbased on energy and activity index. But EAR is notaffected by link failure rate in lossy wireless medium.It has been observed through a number of experimentalworks (e.g. in [16]) that for any link, Packet ReceptionRate (PRR) saturates to sufficiently high (almost100%) when the link RSSI is at least -90 dBm, orwhen the Link Quality Indicator LQI is 100. In systemimplementation of EAR, a node eliminates its neighbornode from routing table, to whom it’s RSSI is < -90dBm or it’s LQI is < 100. So EAR can achieve gainsin overall energy and resource usage, while not sufferingdata delivery guarantee because of failure rate of thelinks. This makes it practically applicable in any kindof harsh application environment.
Network Energy Balance: Through localized energybalance, EAR tries to keep a balance in remaining en-ergy of nodes across network. This is crucial both fornetworks with uniform and non-uniform (e.g. hetero-geneous network) starting energy. This is also usefulfor energy harvesting sensor networks. Maintenance ofenergy balance across network inherently increases life-time, also gives the opportunity to intelligently utilizedynamically available energy sources. According to [17],Atkinson index measurement of inequality remains un-changed if there is an equi-proportionate change of alllevels of income. Now EAR ensures messages are notforwarded by nodes with low energy, or not overheardby nodes with very low energy. Thus from the prop-erty mentioned, EAR tries to thwart the degradationin energy balance in local neighborhood due to routingof messages generating from nodes in non-uniform rate.In this way EAR tries to keep better energy balance inthe network.
4. THEORETICAL ANALYSIS
We now present the theoretical proof of Theorem 1 andTheorem 2 described in earlier section.n Proof of Theorem 1: We associate a cost fi foreach node i ∈ V . Now the cost fi(k) for node i beforethe arrival of message k is as described in equation 7.
fi(k) = Ei(λαi(k) − 1)/Bi(k) (7)
Let S(k) be the set of messages those are successfullyrouted by EAR until the arrival of message k. Nowto prove the competitive ratio, we first find the lowerbound of total message length successfully routed byEAR, in terms of node cost fi.
Lemma 4.1.∑i∈V fi(k) ≤ 2qMP.lg(λ).σL(k)
Proof. Considering any message k′ ∈ S(k), fromequation 7, for any node i ∈ V :
fi(k′ + 1)− fi(k′)
≤ Ei.(λαi(k
′+1) − 1)
Bi(k′ + 1)− Ei.(λ
αi(k′) − 1)
Bi(k′)
=Ei.λ
αi(k′)
Bi(k′).(
Bi(k′)
Bi(k′ + 1).λαi(k
′+1)−αi(k′) − 1)
− EiBi(k′)
.(Bi(k
′)
Bi(k′ + 1)− 1)
≤ Ei.λαi(k
′)
Bi(k′).(
Bi(k′)
Bi(k′ + 1).λlk′eij/Ei − 1)
− EiBi(k′)
.(Bi(k
′)
Bi(k′ + 1)− 1)
∆ (={N(i) ∪ i}) is the set of node i and itsneighbors. We define two terms X(k′)=
∑p∈∆Ep(k
′)
and Y (k′)=∑p∈∆−iEp(k
′)(1−ε). Then due to cost ofrouting message k′ for node i and cost of overhearingmessage k′ by awake neighbors of i:∑
p∈∆
Ep(k′ + 1) = X(k′ + 1) = X(k′)− lk′eij − β1 (8)
∑p∈∆
Ep(k′)1−ε = Y (k′) + Ei(k
′)1−ε (9)
∑p∈∆
Ep(k′ + 1)1−ε = Y (k′) + (Ei(k
′)− lk′eij)1−ε − β2 (10)
β1 and β2 are energy cost due to message overhearing,and they vary with every message k′. Now we compute
the expression Bi(k′)
Bi(k′+1) .
Bi(k′)
Bi(k′ + 1)
=
|∆|∑p∈∆ Ep(k′) .(
1|∆|
∑p∈∆Ep(k
′)(1−ε))1/(1−ε)
|∆|∑p∈∆ Ep(k′+1) .(
1|∆|
∑p∈∆Ep(k′ + 1)(1−ε))1/(1−ε)
=(X(k′)− lk′eij − β1).( 1
|∆| (Y (k′) + Ei(k′)(1−ε)))1/(1−ε)
X(k′).( 1|∆| (Y (k′) + (Ei(k′)− lk′eij)(1−ε) − β2))1/(1−ε)
=(X(k′)− lk′eij − β1).21/(1−ε).(lg(Y (k′)+Ei(k
′)(1−ε))−lg(|∆|))
X(k′).21/(1−ε).(lg(Y (k′)+(Ei(k′)−lk′eij)(1−ε)−β2)−lg(|∆|))
=(X(k′)− lk′eij − β1)
X(k′).2
1/(1−ε).lg( Y (k′)+Ei(k′)(1−ε)
Y (k′)+(Ei(k′)−l
k′eij)(1−ε)−β2)
=(X(k′)− lk′eij − β1)
X(k′)
.(Y (k′) + Ei(k
′)(1−ε)
Y (k′) + (Ei(k′)− lk′eij)(1−ε) − β2)1/(1−ε)
Now, the term T1=(X(k′)−lk′eij−β1)
X(k′) is
slightly lower than 1, the term T2=
( Y (k′)+Ei(k′)(1−ε)
Y (k′)+(Ei(k′)−lk′eij)(1−ε)−β2)1/(1−ε) is slightly higher
The Computer Journal, Vol. ??, No. ??, ????

8 Debraj De et al.
than 1. This is due to relatively small amount of en-ergy consumption in each routing step (with respect tothe remaining energy of nodes). Then it can be provedthat T1.T2 ≤ M , where M is a relatively high positive
constant. Then, Bi(k′)
Bi(k′+1) ≤ M .
Now from expression of fi(k′ + 1) − fi(k′): fi(k
′ +
1) − fi(k′) ≤ 2Ei.λ
αi(k′)
Bi(k′).( Bi(k
′)Bi(k′+1) .λ
lk′eij/Ei − 1), and
since value of λ is high. Therefore:
fi(k′ + 1)− fi(k′)
≤ 2Ei.λ
αi(k′)
Bi(k′).(
Bi(k′)
Bi(k′ + 1).λlk′eij/Ei − 1)
≤ 2Ei.λ
αi(k′)
Bi(k′).(Mλlk′eij/Ei − 1)
= 2Ei.λ
αi(k′)
Bi(k′).(M2lk′eij lg(λ)/Ei − 1)
Since lk≤mini∈V Eicmaxlgλ, therefore lk′cij lg(λ)/Ei≤1. For
0 ≤ x ≤ 1, 2x ≤ (x+ 1). Therefore:
fi(k′ + 1)− fi(k′)
≤ 2Ei.λ
αi(k′)
Bi(k′).(Mlk′cij lg(λ)/Ei +M − 1)
≤ 2qM.lk′cij lg(λ)λαi(k′)
Bi(k′)
This is because λ is very high and q is a relativelylarge positive constant. Now let P (k′) be the path overwhich the message k′ was successfully routed. Therefore∑ij∈P (k′) cija(j, k′)(λαi(k
′) − 1)/Bi(k′) ≤ σ.
∑i∈V
(fi(k′ + 1)− fi(k′))
=∑
ij∈P (k′)
(fi(k′ + 1)− fi(k′))
≤∑
ij∈P (k′)
2qM.lk′cij lg(λ)λαi(k′)
Bi(k′)
= 2qM.lg(λ)lk′∑
ij∈P (k′)
cij(λαi(k
′) − 1)
Bi(k′)
+2qM.lg(λ)lk′∑
ij∈P (k′)
cijBi(k′)
≤ 4qM.lg(λ)lk′σ
To note that |P (k′)|<n. For k′ /∈ S(k), fi(k′ + 1) −
fi(k′) = 0, fi(1) = 0 ∀i ∈ V . Then:∑
i∈Vfi(k)
=∑
k′∈S(k)
∑i∈V
(fi(k′ + 1)− fi(k′))
≤∑
k′∈S(k)
4qM.lg(λ)lk′σ
= 4qM.lg(λ)σL(k)
Let NS(k) be the set of messages successfully routedby the optimal off-line algorithm but rejected by EAR,until arrival of message k. Now we show that: ∀k′ ∈NS(k),
∑ij∈P (k′) cija(j, k′)(λαi(k
′) − 1)/Bi(k′) > σ.
A message k′ ∈ NS(k) is rejected by EAR if: (i) thereis not sufficient energy on some node to forward themessage, or (ii) γ′k > σ. Now the lemma holds true forsituation (ii). We have to prove the lemma for situation(i). Let message k′ is rejected due to situation (i) inthe protocol. That message k′ is successfully routedby optimal offline algorithm through path say Popt(k
′).But for EAR, there is at least a link i′j′ ∈ Popt(k′), forwhich Ei′(k
′)<l′kci′j′ . Therefore αi′(k′)=1−Ei′(k′)/Ei′
≥ 1− (1/lgλ) (using equation 6). Therefore:∑ij∈Popt(k′)
cija(j, k′)(λαi(k′) − 1)/Bi(k
′)
≥ ci′j′a(j′, k′)(λαi′ (k′) − 1)/Bi′(k
′)
> ci′j′a(j′, k′)(λ1−(1/lgλ) − 1)/Bi′(k′)
= ci′j′a(j′, k′)(λ/2− 1)/Bi′(k′)
≥ cminamin(λ/2− 1) = ncmax = σ
Finally we show that:
ncmax(Lopt(k)− L(k)) ≤∑i∈V
fi(k) (11)
ncmax(Lopt(k)− L(k))
≤∑
k′∈NS(k)
ncmaxlk′
<∑
k′∈NS(k)
∑ij∈P (k′)
lk′cija(j, k′)(λαi(k′) − 1)/Bi(k
′)
≤∑
k′∈NS(k)
∑ij∈P (k′)
lk′cijfi(k′)/Ei
≤∑i∈V
fi(k)∑
k′∈NS(k),ij∈P (k′)
lk′cij/Ei
≤∑i∈V
fi(k)
The Computer Journal, Vol. ??, No. ??, ????

An Energy and Activity Aware Routing Protocol for Wireless Sensor Networks 9
The second last step uses the fact that the node costfi is non-decreasing. Last step uses the fact that thetotal energy spent for routing the messages at a nodecannot exceed its initial energy. Finally from Lemma 1and equation 11, we can prove the following expression,thus proving Theorem 1. (Q = 4qM is a positive value.)
L(k)
Lopt(k)≥ 1
1 +Q.lg(λ)(12)
n Proof of Theorem 2: Competitive ratio analysisimplicitly proves the sub-optimality of EAR in lifetimew.r.t application point of view. To note that thecompetitive ratio analysis for EAR used no previousknowledge of message arrival. Now for analysis ofanother definition of network lifetime (time till the firstnode dies), we have utilized a property that is commonto Smart Environment applications. The nodes insensor networks in such scenario generate same amountof data in each time period, although in each period thedata generation sequence may be different. The timeperiod can be short or long. This is actually commonto a lots of sensor network applications, for exampleSmart Home sensor networks, where the daily activitypatterns are same, thus message generation is roughlyperiodic. This is validated through collected motiondetection sensor network data in real experiments. Sowe have assumed here that in each time period [t, t+δ),the message distributions on the nodes in the networkare the same. Then its possible to schedule the messagerouting with the same policy in each time period of δ.
Now let the network starts at time t = 0, networklifetime on optimal routing algorithm (for maximumlifetime) is say TML, network lifetime on EAR routingalgorithm is Tear. The initial energy content of eachnode i ∈ V is Ei, remaining energy of each node i ∈ Vafter time TML is Ei(TML), remaining energy of eachnode i ∈ V after time Tear is Ei(Tear). Let the messagesequence in any time period is m1, m2, ...., mS−1, mS .
n∑i=1
Ei =
n∑i=1
Ei(TML) +
M(TML)∑k=1
PMLmk
(13)
n∑i=1
Ei =
n∑i=1
Ei(Tear) +
M(Tear)∑k=1
P earmk(14)
Where M(TML) and M(Tear) are the number ofmessages routed from time 0 to TML and from time0 to Tear respectively. PML
mkand P earmk
are the powerconsumption of the k-th message mk by runningoptimal algorithm for maximum lifetime and EARalgorithm respectively. The messages are same inany two periods, without considering the sequence.Therefore it is possible to schedule the messages so thatthe message rates along the same route are the same inany two periods. Therefore:
M(TML)∑k=1
PMLmk
=M(TML)
S
S∑k=1
PMLmk
=TML
δ
S∑k=1
PMLmk
(15)
M(Tear)∑k=1
P earmk=Tearδ
S∑k=1
P earmk(16)
P earmkis the energy consumption of the message
mk in a period by running algorithm EAR. NowEAR considers remaining energy, energy balance andactivity-awareness. Thus the total energy consumption∑Sk=1 P
earmk
will be less than that of (∑Sk=1 P
actmk
) apurely activity-aware routing algorithm (say act) thatuses routing metric a(j,mk) for each node j. So,∑Sk=1 P
earmk
<∑Sk=1 P
act′
mk. Now, for each message mk, it
is possible to construct the Network Activity TransitionProbability graph for the sensor network G. ATP (smk)is the constructed ATPG graph where the data sourceis smk , the weight for each node j is a(j,mk), andPatp(smk) is the computed energy consumption ofgreedily selected path from smk to base station using
the node weight a(j,mk). So∑Sk=1 Patp(smk) can
be computed from G and ATP . Now,∑Sk=1 P
earmk
<∑Sk=1 P
actmk
=∑Sk=1 Patp(smk). On the other hand∑S
k=1 PMLmk
>∑Sk=1 PMin(smk), where PMin(smk) is
that of the the minimum energy consumption path in Gfrom smk to base station. PMin(smk) can be computedfrom G. Therefore:
n∑i=1
Eeari +
Tear
δ
S∑k=1
Patp(smk ) >
n∑i=1
EMLi +
TML
δ
S∑k=1
PMin(smk )
(17)
Tear >TML
∑Sk=1 PMin(smk)∑S
k=1 Patp(smk)+δ(∑ni=1E
MLi −
∑ni=1E
eari )∑s
k=1 Patp(smk)
(18)
5. IMPLEMENTATION AND PERFOR-MANCE EVALUATION
In this section we have described the implementation,experiments and the analysis of results in detail.
5.1. Implementation of EAR
In EAR protocol with admission control, the datasource node needs to have some knowledge about thenetwork topology and the current energy of nodes.However, in practical network the topology and energylevel of the nodes change frequently. It may work forsmall networks using information dissemination, butwill be difficult to maintain for large networks. In thisaspect, in our implementation, EAR is locally appliedto each one hop neighborhood in the network. Wehave implemented EAR and other comparing routing
The Computer Journal, Vol. ??, No. ??, ????

10 Debraj De et al.
Sensor Mote Hardware
Link layer Sensor Driver
Network Sensing
Middleware Activity-Awareness
Application
activity detection
activity detection
EAR
activity awareness factor
neighbor information
(hop, energy balance, activity awareness)
neighbor information
data message,beacon message
FIGURE 8. TinyOS node software stack included withactivity-awareness and energy-balance design for EAR.
protocols in TinyOS-2.x, one of the most popularevent based operating system environment for wirelesssensor networks. The TinyOS node software stack withactivity-awareness and energy-balance design supportfor EAR is shown in Figure 8. Regarding activityawareness in the experiments, the set of paths ofactivity in network is used for probabilistic pathselection, and the network nodes are injected withintelligence of corresponding probabilistic transitioninformation (ATPG graph).
5.2. Evaluation in Motelab Tested
Evaluation environment : We have evaluated our pro-posed EAR protocol in large scale 82 node network ofTelosB motes (physically distributed in three floors, asshown in Figure 9(a), 9(b) and 9(c)) in Harvard Mote-lab sensor network testbed [2]. The experiments areconducted in 82 node network physically distributedacross three floors.
Activity transition and data generation: From aseparately deployed motion sensor network testbed wehave learned the activity transition patterns and havevalidated the construction of activity transition graphATPG (presented in section 3). The activity transitionpatterns are modified to be scalable for a 82 nodeMotelab testbed, and is injected in the testbed foractivity event generation and activity transition. Theactivity transition decides the order with which nodeswill be active.
The activity event generation makes node(s) active,letting it send data to sink node (base station)at a high rate (we used data sending rate of 480Bytes/second). We have emulated the activity eventsby generating three independent sequences of activenodes (indicating motion trails) each in one of thethree floors. From a remote server, periodic serial
Floor 1
(a)
Sink Node
Floor 2
(b)
Floor 3
(c)
FIGURE 9. Most frequent activity sequences (order ofactive nodes) occurred in each floor of Motelab testbedduring experiment
message (containing new active node numbers) is sentto the sensor motes in the testbed to generate theactivity sequences. The sensor nodes receiving theserial message with it’s ID start generating sensor data.Other nodes act as relay only. This periodic activationof nodes through serial message follow the activitytransitions defined in the corresponding ATPG. In thisway the activity transition experiments are performedwith networkwide data collection. In addition eachnode periodically sends one local status data packet(containing information of remaining energy, hop countetc.) to sink every 30 seconds.
Comparison: For performance comparison we havecompared EAR with standard existing routing schemesto show performance improvement. Following relevantrouting protocols are used: PMin (shortest pathrouting), CTP [18] (very commonly used data collectionprotocol for sensor networks, that uses link and pathquality), and CMAX (an energy aware protocol [9]where data is forwarded preferably to neighbor withhigher remaining energy in the neighborhood).
The 82 node network formed a 9 hop routing tree with-5 dBm transmission power of CC2420 radio of TelosBmotes. The sink node is in middle of the three floors. In
The Computer Journal, Vol. ??, No. ??, ????

An Energy and Activity Aware Routing Protocol for Wireless Sensor Networks 11
0
20
40
60
80
100
1 3 5 7 10 15 20 30
CD
F (
%)
Delivery Latency (second)
PMinCTP
CMAXEAR
FIGURE 10. Distribution of data delivery latency.
this network data collection scenario we have evaluatedfollowing parameters: (i) data delivery latency, (ii) datathroughput, (iii) minimum node energy in the networkthrough time (indicating network lifetime). Now wedescribe the performance analysis of our proposed EARprotocol compared to existing protocols.
Latency: Figure 10 represents the distribution ofdata delivery latency of packets in the 82 node network.It can be observed that EAR provides much lowerlatency than each of the comparing protocols PMin,CTP and CMAX. In PMin, CTP, CMAX, 80% of thepackets are delivered with latency between 22 secondsto 25 seconds. But in EAR the 80% of the packets aredelivered within latency around 18 seconds. ThereforeEAR provides much lower delivery latency, providingbetter performance to the application. EAR achievesthis improvement in latency by avoiding selection ofcurrently active nodes (which are busy with sensing andsending own data) as relays.
Data Throughput: Figure 11 shows the datathroughput for each node at sink. More throughputindicates more event data successfully delivered andreported at sink. It is observed that for each of the 82nodes, EAR provides much improved data throughputthan others. For all the 82 nodes EAR provides adata throughput improvement ranging from 6% to 13%.This advantage in EAR comes from avoiding selectionof currently active nodes (which are busy with sensingand sending own data) as relays.
Lifetime: Figure 12 represents the minimum energyof any node in the entire network through time. Thisproperty decides the network lifetime. The energyconsumption is configured in such a way that all nodesstart with energy 2200 mAh. For indicating the rateof drop in minimum remaining node energy in network,Figure 12 represents the energy drop with respect to achosen value of 0.05806 mAh. This value is chosen forpurpose of analysis because the minimum node energyin PMin reduces by an amount of nearly 0.05806 mAhenergy in experiment run time of 1800 seconds (i.e.30 minutes). This chosen value for analysis doesn’t
0.52.0
4.0
10
20
30
36
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081
0.52.0
4.0
10
20
30
36
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081
0.52.0
4.0
10
20
30
36
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081
1hop
3hop
5hop
6hop
7hop
8hop
9hop
4hop
2hop
CMAX
CTP
EAR
Throughtput (Bytes/second) vs Node Id
Throughtput (Bytes/second) vs Node Id
Throughtput (Bytes/second) vs Node Idtotal 82 nodes
total 82 nodes
total 82 nodes
FIGURE 11. Data throughput at Sink
0
20
40
60
80
100
200 500 800 1100 1400 1800
Min
imu
m N
od
e E
ner
gy
(%
)
Time (s)
% Remaining Energy is w.r.t 0.05806 mAhr
PMinCTP
CMAXEAR
CMAX
PMin
CTP
FIGURE 12. Minimum node energy in network.
The Computer Journal, Vol. ??, No. ??, ????

12 Debraj De et al.
affect the nature of energy consumption of network.Now it can be observed that the minimum energy ofany node in PMin, CTP and CMAX depletes fasterthan the one in EAR. Therefore in protocols otherthan EAR network node depletes almost all it’s energywithin time 1800 seconds, had the network start with0.05806 mAh for all nodes. But in same scenario insame time the minimum energy of any node in EARwould have still around 32% energy left. Thereforeit is clear that network lifetime for EAR will also bemuch higher than others. EAR achieves this advantagebecause of energy balanced relay node selection.
5.3. Evaluation in TOSSIM Simulator
To validate the scalability of EAR we have usednetwork size containing 20, 40, 60, 80 and 100 nodes(all with lossy wireless channel). The topology of 20node network closely follows the node distribution inkitchen, dining room and bedroom of CASAS testbed,as shown in Figure 6. The topology of nodes in theother networks also follow the layout in Figure 6, butmodified according to the network size. The activitiesare probabilistic and follow the activity transitionpatterns. We have generated ATPG with similaractivity patterns for larger networks containing 40, 60,80 and 100 nodes. When activities occur in a node, itperforms some processing and then sends out bunch ofdata packets containing activity detection data.
The energy consumption is calculated using therelevant model of: CC2420 radio parameters (19.7 mAcurrent consumption in receive mode, 17.4 mA currentconsumption in transmit mode, 250 kbps data rate with48 kByte data packet size), and the MSP430 MCUparameters (3 mA current consumption in active modedue to sensing and computation). To note that dueto timer and ADC read operations, sensor nodes canconsume as high as 3mA current (as observed in [19]).The remaining node energy is updated accordingly.EAR is compared with following relevant routing
protocols: PMin, CTP , MaxEn (data forwarded tonode with maximum remaining energy among the relaynodes) and CMAX. Each experiment with a networksize is conducted for 2 hours. This generates multiplepossibility paths of activity due to probabilistic activitytransition in ATPG.
Data delivery latency: Despite preferring activity-aware and energy-balanced path, EAR also providesbetter data delivery latency. This is because of theactivity aware property of EAR, which prefers lessactive nodes as forwarder (i.e. relay) node. This isvalidated from experimental results in Figure 13. Fordifferent network sizes, EAR provides from 6.8% to19.1% less data delivery latency over others. CMAXand MaxEn are only energy-aware, so in non-uniformdata generating network (leading to non-uniform energynodes) the routed data packets sometimes deviate andfollow a longer path. This leads to high data delivery
0.1
0.2
0.3
0.4
0.44
20 40 60 80 100
Aver
age
Del
iver
y L
aten
cy (
seco
nds)
Network Size
PMin CTP MaxEn CMAX EAR
FIGURE 13. Mean data delivery latency (seconds) withvarying network size.
latency. PMin has better data delivery latency byfollowing shorter path, but suffers from retransmissionsand from processing delay when being forwardedthrough active nodes (busy in sensing, processing andsending own data). CTP provides better deliverylatency, but still performs worse than EAR because itdoesn’t learn from activity patterns.
26
30
40
50
60
67
20 40 60 80 100
Thro
ughput
(Byte
s/se
cond)
Network Size
PMin CTP MaxEn CMAX EAR
FIGURE 14. Data throughput at base station (success-fully delivered message per unit time) in Bytes/second withvarying network size.
Data throughput: EAR tries to minimize thenetwork lifetime, with maintenance of network energybalance. Despite providing these advantages, EARdoesn’t degrade the throughput (successful messagereceived at sink per unit time) much. This is validatedthrough results in Figure 14. PMin and CTP providebetter throughput. But throughput performance ofEAR closely follow (within upto 2% lesser) thatof PMin and CTP . Energy-aware only protocolsCMAX and MaxEn suffer worse throughput for lackof activity-awareness and lack of faster convergence innon-uniform activity generation network. To note thatdespite following activity and energy awareness, EARmake sure faster convergence by using hop spannerproperty discussed earlier.
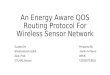
Network lifetime: From experimental results inFigure 15 it can be observed that EAR achieves themaximum network lifetime for all the network sizes. Fordifferent network sizes, EAR achieves an improvement
The Computer Journal, Vol. ??, No. ??, ????

An Energy and Activity Aware Routing Protocol for Wireless Sensor Networks 13
18
25
30
35
40
45
50
55
20 40 60 80 100
Pro
ject
ed N
etw
ork
Lif
etim
e (D
ays)
Network Size
PMin CTP MaxEn CMAX EAR
FIGURE 15. Projected network lifetime (days) withvarying network size.
in lifetime over others from 9.31% to 23.77%. Figure 15CMAX and MaxEn have better network lifetimethan CTP and PMin, because CMAX and MaxEnare energy aware protocols. But their performanceis worse than EAR due to inability to keep energybalance and to be activity-aware, CTP and PMinsuffer because they are not activity-aware or energybalancing. This is interesting observation for networkswhere data generation is a non-uniform and dynamicprocess, but have some patterns.
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.2
20 40 60 80 100
Ener
gy C
onsu
mpti
on (
uJ/
node/
pac
ket
)
Network Size
PMin CTP MaxEn CMAX EAR
FIGURE 16. Energy consumption per successfullydelivered message per node (uJ/packet/node) with varyingnetwork size
Network energy consumption: EAR also hasminimum network energy consumption for all networksizes. In Figure 16 we have used the parameter forindicating effective network energy consumption. Thisis represented by the parameter: the total energyconsumption per delivered packet per node. Thisindicates the average amount of energy spent by anode to enable one successful routing and collectionof a data packet from network to sink. It can beobserved that EAR has the minimum observed networkenergy consumption. For different network sizes, EARprovides from 3.4% to 17.2% improvement in networkenergy consumption over others. This proves theeffectiveness of activity-awareness and energy balanceof EAR. Due to energy balance property and avoidingactive nodes for forwarding, the network as a wholespends less amount of energy for delivering data
packets.Scalability: All the advantages of EAR are achieved
for network size varying from 20 to 100. This proves thescalability, thus its real-world applicability for pervasiveenvironments.
6. CONCLUSION
Unlike traditional networks, the operation of sensornetworks is driven by activities in the embeddedenvironment. These activities show certain patterns inlong-term operation. But the existing sensor networkdesign seldom learns and exploits the activity patternsto optimize network operations. In this paper we haveproposed EAR for activity-aware and energy-balancedrouting. As a case study EAR is evaluated with SmartEnvironment data trace. The experimental resultshave demonstrated its efficiency both with respect toapplication and network performance, as well as itsscalability. The possible future work includes adaptivejoint radio scheduling and routing, with delay control.
REFERENCES
[1] Tang, S., De, D., Song, W.-Z., Cook, D., and Das,S. (2011) ActSee: Activity-Aware Radio Duty-Cyclingfor Sensor Networks in Smart Environments. EighthIEEE International Conference on Networked SensingSystems (IEEE INSS).
[2] Werner-Allen, G., Swieskowski, P., and Welsh, M.(2005) MoteLab: a wireless sensor network testbed.Fourth International Symposium on Information Pro-cessing in Sensor Networks (IPSN).
[3] CASAS Smart Home Project.http://ailab.wsu.edu/casas/.
[4] Smart Home-based Health Platform for BehavioralMonitoring and Alteration for Diabetic and Obese In-dividuals. http://www.icta.ufl.edu/projects nih.htm.
[5] Chang, J. H. and Tassiulas, L. (2000) EnergyConserving Routing in Wireless Ad-hoc Networks.INFOCOM, pp. 22–31.
[6] Chang, J. H. and Tassiulas, L. (2000) Fast ApproximateAlgorithms for Maximum Lifetime Routing in WirelessAd-hoc Networks. Networking.
[7] Li, Q., Aslam, J., and Rus, D. (2001) Online power-aware routing in wireless Ad-hoc networks. Mobicom.
[8] Xue, Y., Cui, Y., and Nahrstedt, K. (2005) AUtility-based Distributed Maximum Lifetime RoutingAlgorithm forWirelessNetworks. QShine.
[9] Kar, K., Kodialam, M., Lakshman, T. V., Tassiulas, L.,and Tassiulas, R. (2003) Routing for Network CapacityMaximization in Energy-constrained Ad-hoc Networks.INFOCOM.
[10] Lin, L., Shroff, N. B., and Srikant, R. (2007)Asymptotically Optimal Energy-Aware Routing forMultihop Wireless Networks With Renewable EnergySources. IEEE/ACM Transactions on Networking, 15.
[11] Ok, C., Mitra, P., Lee, S., and Kumara, S. (2007)Maximum Energy Welfare Routing in Wireless SensorNetworks. NETWORKING 2007.
The Computer Journal, Vol. ??, No. ??, ????

14 Debraj De et al.
[12] Ahn, S. and Kim, D. (2006) Proactive Context-AwareSensor Networks. EWSN.
[13] Menchaca-Mendez, R. and Garcia-Luna-Aceves, J. J.(2010) Robust and Scalable Integrated RoutinginMANETs Using Context-Aware Ordered Meshes.INFOCOM.
[14] Basu, P. and Redi, J. (2004) Effect of OverhearingTransmissions on Energy Efficiency in Dense SensorNetworks. IPSN.
[15] Atkinson, A. B. (1970) On the measurement ofinequality. Journal of Economics Theory , ?
[16] Lin, S., Zhang, J., Zhou, G., Gu, L., Stankovic,J. A., and He, T. (2006) ATPC: adaptive transmissionpower control for wireless sensor networks. SenSys’06: Proceedings of the 4th international conference onEmbedded networked sensor systems, New York, NY,USA, pp. 223–236. ACM Press.
[17] Das, T. and Parikh, A. (1982) Statistical interpretation,decomposition and properties of Atkinson’s inequalityindex. Decisions in Economics and Finance , ?
[18] Gnawali, O., Fonseca, R., Jamieson, K., Moss, D., andLevis, P. (2009) Collection Tree Protocol. Proc. of the7th ACM Conference on Embedded Networked SensorSystems (SenSys).
[19] Lu, G., De, D., Xu, M., Song, W.-Z., and Shirazi, B.(2010) TelosW: Enabling Ultra-Low Power Wake-OnSensor Network. INSS 2010, June.
The Computer Journal, Vol. ??, No. ??, ????