Embed Size (px)
Citation preview

Review ArticleRoad-Aware Routing Strategies for Vehicular Ad Hoc Networks:Characteristics and Comparisons
Kashif Naseer Qureshi,1 Abdul Hanan Abdullah,1 Jaime Lloret,2 and Ayman Altameem3
1Faculty of Computing, Universiti Teknologi Malaysia, Johor Bahru, Malaysia2Universidad Politecnica de Valencia, Spain3College of Applied Studies and Community Services, King Saud University (KSU), Riyadh, Saudi Arabia
Correspondence should be addressed to Kashif Naseer Qureshi; [email protected]
Received 16 November 2015; Accepted 1 February 2016
Academic Editor: Khalil El-Khatib
Copyright © 2016 Kashif Naseer Qureshi et al. This is an open access article distributed under the Creative Commons AttributionLicense, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properlycited.
The tremendous advancement in new wireless technologies has led to a renewed interest in vehicular ad hoc networks. However,due to the high mobility and dynamic nature of vehicular networks, great challenges exist for data delivery. In order to designefficient and smart routing strategies for stable communication, several different types of routing protocols have been integrated.One efficient type is the road-aware routing protocol which is based on road statistics (e.g., traffic density, intersections, and roadsegments). The main objective of the survey conducted in this paper is to discuss the recent road-aware routing protocols andcategorize them according to different aspects. In addition, this review investigates the protocols in terms of their forwardingprocesses, routing metrics, recovery mechanisms, and performance. Moreover, routing challenges and comparisons are discussed.
1. Introduction
Vehicular ad hoc networks (VANETs) are an emerging classof mobile ad hoc networks (MANETs) for pervasive wirelesscommunication among vehicles. In VANETs, the vehiclescommunicate and coordinate among themselves throughpure ad hoc (vehicle-to-vehicle) and fixed infrastructuremodes. Vehicular networks have received intensive attentiondue to the wide range of potential safety and comfort appli-cations and services in the transportation sector [1]. Theseapplications assist drivers to be alert to any critical situation(such as a car accident) and provide precrash sensing, unseenobstacles, and collision warnings for improved passengersafety and the alleviation of traffic flow. Besides safetyapplications, there are a plethora of comfort applications thatprovide entertainment to passengers such as Internet access,e-commerce, and weather information [2, 3].
The growing interest in this field is an incentive forresearchers, car industry stakeholders, engineers, and gov-ernments to create effective solutions and platforms forvehicular communication. Being a subclass of MANETs,VANETs have some unique characteristics such as mobility
patterns, high vehicle velocity, dynamic topologies, and freq-uent link disruptions [4]. These characteristics generate par-ticular challenges and research issues for handling multihopcommunication in a network. The networks suffer fromfrequently broken routes, frequent packet dropping, andhigh overhead due to failure notifications and route repairs,leading to high transmission delays and low data deliveryratios [5, 6].
To handle multihop routing in VANETs, a networkrequires a robust and efficient routing solution to handle thespecial characteristics of the network. Routing strategies formultihop communication have gained researchers’ attentionand are classified into different types. The most effectivetype is geographical routing which can handle restricted andbidirectional vehicle movements along roads. Geographicalrouting protocols use location information for data deliveryand are considered to be a promising type of routing to handlescalability and robustness when dealing with the dynamictopologies in a network [7–9]. In these protocols, digitalmaps, global positioning system (GPS) receivers, and naviga-tion systems are used to find the geographical locations of
Hindawi Publishing CorporationInternational Journal of Distributed Sensor NetworksVolume 2016, Article ID 1605734, 19 pageshttp://dx.doi.org/10.1155/2016/1605734

2 International Journal of Distributed Sensor Networks
vehicle nodes [10]. However, with frequent network par-titions, limited link lifetimes, and high vehicle velocity,providing accurate traffic information remains a challenge[6, 11].
Many geographical routing protocols have been proposedin recent research with different types of routing metrics.Most of the metrics are related to the road and vehicleinformation in a network such as the traffic density, velocity,road map, vehicle direction, and road segments. These typesof protocols are called road-aware routing (RAR) protocolsdue to their network and road awareness characteristics.These protocols have gained attention due to their enhancedperformance and efficient routing decisions in a network.Basically, RAR protocols use intervehicle connectivity, trafficdensity, and junctions for their routing decisions.
The RAR schemes are viable as they can work withtraffic awareness and network variables. These protocolsdetermine the network links’ reliability, analyze the road andvehicle information, make routing decisions among vehicles,and avoid poor communication quality and less dense net-works.However, despitemany advantages, the RARprotocolspresent several open research challenges and issues. One ofthe significant challenges is the network and traffic statusevaluation in terms of accurate and up-to-date informationabout the vehicles and networks. The review conducted inthis paper discusses the RAR protocols and highlights thelimitations, challenges, and features of recent RAR protocols.To the best of the authors’ knowledge, this survey is the first toreview RAR protocols in the VANET environment.Themainobjectives of this paper are as follows:
(1) To discuss the most recent RAR protocols in the fieldof VANET and explore their operations and processeswith a critical analysis of the routing metrics.
(2) To highlight the challenges and limitations of theprotocols.
(3) To summarize the protocols’ critical issues that shouldbe taken into account in the design of robust routingschemes for networks and to recommend futuredirections for further research.
The remainder of the paper is structured as follows: Section 2provides an overview of vehicular routing protocols anddiscusses themost effective type of routing. Section 3 presentsa classification of RAR protocols and discusses each ofthe categories in detail. Section 4 discusses the challengesand issues in RAR protocols through a comparison and aninvestigation of their limitations. Section 5 identifies openresearch issues and future research directions. Section 6concludes the work.
2. Overview of Vehicular Ad Hoc NetworkRouting Protocols
VANETs require efficient routing in the presence of environ-mental obstacles and dynamic and unpredictable topologieswith high network mobility to maximize throughput, controloverhead, and minimize packet loss. The vehicle nodes aredynamic in nature, and finding an optimal route to the
destination is still a challenge. Routing strategies are definedbased on the application requirements and are distinguishedbased on architecture. Basically, vehicular architecture iscategorized into three types: pure ad hoc, infrastructure-based, and hybrid. The traditional mobile ad hoc routingprotocols are less able to handle vehicular characteristics [12].Routing protocols are categorized into different types suchas topology, geographical, cluster, geo-cast, and multicastrouting protocols. Most routing protocols belong to the twomain categories of topology and geographical routing. Intopology-based routing, the vehicle nodes store the infor-mation about the network topology and depend on staticend-to-end routes. Thus, these protocols suffer from highmaintenance (in terms of communication and memory) andunnecessary flooding issues. Due to the high communicationoverhead, high mobility, and high resource cost, the updatesand routing requests are outdated [13]. In order to overcometopology-based routing constraints, geographical routingprotocols were introduced, whereby the protocols only storeinformation about neighbors.
2.1. Geographical Routing Protocols. Geographical routingprotocols eliminate the need for topology information as thenodes only store information about the directly accessibleneighbors within transmission range.These protocols rely onthe position information of vehicle nodes to forward the datatoward the destination. The position information is knownthrough GPS or periodic beaconing messages. Recently,vehicle manufacturing companies have begun to offer GPSservices with digital maps in their cars, which are importantfor geographical positions for routing. Geographical routinghas been identified as a more reliable and efficient approachfor VANETs due to the development of location services [14].In order to find the neighbor nodes in a network, each vehiclemaintains and updates a neighbor table via the exchange ofbeacons or hello messages with its neighbors.
Greedy perimeter stateless routing (GPSR) [15] is a basicgeographical routing protocol.Theprotocol uses twoworkingmodes, namely, the greedy and perimeter modes, to forwardthe data toward the destination. The greedy mode sendsdata to the node that is closest to the destination butmay encounter local optimum or maximum issues. Localoptimum or maximum issues occur when the forwardervehicle node is near the destination node but its neighborsand the destination node are not accessible through one-hop communication. In such scenarios, the protocol uses theperimeter or recovery mode which routes the data packetsthrough the right-hand rule and selects the next forwarderneighbor. According to the right-hand rule, whenever asource node receives a data packet from an edge node, it sendsthe data packet to its next edge counterclockwise. Afterward,the perimeter mode is switched to greedy mode; otherwise,the packet forwarding will continue with the perimeter modeto forward the data towards the destination. The protocolmay not perform well in an uneven traffic distributionenvironment with high mobility and different road segmentsin the network. This is because the protocol activates facerouting and the data are forwarded through a number of facestoward the destination.

International Journal of Distributed Sensor Networks 3
In order to address the limitations of geographicalrouting, researchers have proposed new routing metricswhich involve road awareness in routing decisions. The roadawareness metrics are integrated with geographical routingprotocols for efficient data transmission in a network byadopting information such as road density, vehicle direction,distance, intersections, digital map, and road segments. Thenext section discusses the concept and classification of roadawareness-based protocols in detail.
3. Concept of Road Awarenessand Classification of Road-AwareRouting Protocols
This section discusses the most recent road-aware geograph-ical routing protocols and their performance and criticalissues in VANETs. Geographical routing protocols have beenrecognized as the most reliable and effective approach forvehicular networks [16, 17]. The performance and capabil-ities of simple geographical routing protocols are limitedin VANETs due to the special characteristics of vehicularnetworks. In vehicular networks, the moving nodes arerestricted by roads and high and low traffic density affectsthe transmission lifetime and lead to disconnectivity andnetwork overhead [18]. Real-time road information is verysignificant in order to check the traffic congestion for routingdecisions. The RAR protocols utilize the road characteristicsand network status such as intersections, traffic density,vehicle distribution, communication load, link qualities, dis-tance, and direction. Therefore, RAR provides more feasiblegeographical information for routing decisions in a networkbased on road awareness metrics.
3.1. Overview of Road-Aware Routing Protocols. Road-awaregeographical routing protocols utilize different road mea-surements for packet forwarding and routing decisions.Theseprotocols utilize the intersections, traffic density, link quality,distance, and direction for data forwarding and, in the caseof a link disconnection, a recovery strategy is adopted. Theseprotocols have three main processes:
(1) Calculate the routing metrics and recalculate orupdate the routes in new conditions.
(2) Measure the routing metrics for realistic indicationsabout road conditions and efficient routing.
(3) Adopt greedy forwarding to forward the data packetand, in the case where there is no neighbor node closeto the destination, adopt a recovery strategy.
In the first process, these protocols define the routingmetrics in order to calculate the routes with the help of net-work conditions. The information about the routing metricscan be recalculated and updated.The routingmetrics are usedto check the traffic status and network conditions. In thesecond process, the protocols measure the routing metricsfor realistic traffic conditions. Afterwards, the packets areforwarded to the next intersection or hop by a forwardingmechanism. The simplest forwarding method is the greedy
approach, which sends the packets to the neighbor nodethat is closest to the destination. However, the simple greedyapproach has some drawbacks. In order to address the greedyapproach issues, new forwarding mechanisms have beenproposed to add distance, direction, and velocitymetrics [19].These greedy protocol enhancements still face packet for-warding problems but with lower probability. In the thirdprocess, if a neighbor node near the destination is notavailable, these protocols switch to a recovery strategy.
Different types of recovery strategies have been adoptedin geographical routing protocols, such as the right-handrule, carry-and-forward, and recalculation of the forwardingpath. The right-hand rule states that, after receiving a packetfrom the edge node, the node will forward the packet to thenext counterclockwise edge node. Whenever a forwardingnode close to the destination is available, the protocolswitches back to forwardingmode.This approach encountersthe issue of looping due to the rapid exchange of constructedgraphs in the network. In the case of the localmaximum issue,the carry-and-forward approach is adoptedwhereby the nodecarries the packet until it finds an optimal candidate nodein the network. The carry-and-forward approach still sufferslong delay issues in a network [20]. The recovery strategy ofrecalculating the forwarding paths also leads to network delayand high overhead.
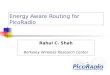
3.2. Routing Strategies. This section discusses the routingprocess of RAR protocols. RAR protocols are designed withdifferent routing strategies which are mainly classified intofive categories: full RAR, intersection-aware routing, twofolddecision routing, traffic density-based routing, and source-based routing. A taxonomy of road-aware protocols, includ-ing the relevant routing strategy and year of publication, isshown in Figure 1. The features of each routing strategy arediscussed in the following subsections.
3.2.1. Full Road-Aware Routing. In the full RAR strategy,the protocol takes full road awareness in order to traversedata packets toward the destination. These protocols havetwo main mechanisms for data forwarding: find the shortestpath and broadcast the data packets to find the best pathtoward the destination. The road map is converted throughthe Dijkstra algorithm into a weighted graph, wherein thejunctions and road edges are graph vertices. The road edgesare weighted based on road lengths and traffic density. Someother RAR metrics also determine the data forwarding suchas the distance of destination, direction of node, link quality,and transmission delay. After checking the road awarenessthrough the weighted graph, positions, and intersections,the road awareness information is added in each packetheader before forwarding. These protocols are efficient dueto multiple levels of road awareness and are suitable for thevehicular environment. On the other hand, these protocolshave some limitations and challenges. One of the main limi-tations relates to saving the road information in each packetsuch as the information about the intersections and thepositions of anchors. In a dynamic vehicular environment,the lifetime of the path is inversely proportional to its length[8]. When each vehicular node takes the decision, it is static

4 International Journal of Distributed Sensor Networks
Road‐aware routingprotocols
Full road‐awarerouting protocols
Intersection‐based road‐ aware routing protocols
Twofold road‐awarerouting
Traffic density‐basedroad‐aware routing
2011 2012 2013 2014 2015
GPGR
CMGR
VLBR
RIVER
GeoSVR
SDR
VDLA
iCARII
iCAR
DAR‐RH
DECARIVER
Real‐timeroad vehicledensityprotocol
ARP‐QD
IBRJBR
CAIR IRQV
TAR TARGET IG
2009‐10
RSBR
Figure 1: Taxonomy of road-aware routing. Notes: ARP-QD = adoptive routing protocol based on QoS and traffic density; CMGR =connectivity-aware minimum delay geographic routing; CAIR = connectivity-aware intersection-based routing; DECA = density-awarereliable broadcasting protocol; DAR-RH = density-aware routing using road hierarchy; GPGR = grid-based predictive geographical routing;GeoSVR=Geographic stateless VANET routing; IBR= Intersection-based routing; IG= improved geographical; iCARII = connectivity-awarerouting protocol; IRQV = intersection-based routing with quality of services; JBR = junction-based routing; RIVER = reliable intervehicularrouting; RSBR = road selection-based routing protocol; SDR = stable direction-based routing; TAR= traffic-aware routing; TARGET= traffic-aware geographical routing; VLBR = VANET load balancing routing; VDLA = traffic density and load-aware routing.
for each packet and cannot be adjusted in line with thetraffic conditions. To determine the complete road awarenessmetrics for establishing the route, the full RAR protocols facenetwork overhead issues especially for recalculating the path.By applying the Dijkstra algorithm on a large city map, theseprotocols have computational complexity issues.
3.2.2. Intersection-Aware Routing. In intersection-awarerouting, the candidate node dynamically selects the nextintersection and uses other feasible routing metrics. Thus,the candidate node selects the next intersection for adjacentroads and selects the optimal route for packet forwarding.The protocol determines the metrics at each intersectionbased on road awareness and traffic situations. Theseprotocols have less network overhead compared to full RARprotocols, as the data packets only carry the next intersectionand destination positions rather than full road information.These protocols adopt the unique characteristics of vehicularnetworks for routing decisions. Despite the low overhead,these protocols still face the delay time issue due to theselection of the intersections one by one [20]. Further,keeping and updating the routing metrics for the routingdecisions are difficult. In addition, these protocols initiatethe measurement process frequently and this is the cause oflow data delivery and high network overhead.
3.2.3. Twofold Decision Routing. Twofold decision routingaddresses the shortcomings of the full RAR and intersection-aware routing by determining different metrics betweenintersections and at intersections. This type of routing issuitable for dense and spare urban environments, wherethe traffic situation is rapidly changing. Thus, these routing
strategies have less network delay due to the processing ofdifferent metrics and decisions.The selection of intersectionsfor routing may lead to the disconnectivity issue due topartitioning in the network and also faces network over-head issues. With twofold strategies, the network overheadincreases to add simple direction and forward progressmetrics between intersections. The network overhead alsoincreases when the candidate node is at an intersectionand the node determines different road metrics. To designtwofold routing, it is important that protocol adopts morerealistic routing metrics for routing.
3.2.4. Traffic Density-Based Routing. Traffic density estima-tion for routing is an important metric for real-time appli-cations in vehicular networks. Traffic density-based routingprotocols determine traffic density by attaining density feed-back from the network and forwarding the data packets withlow and high density routes. These protocols are suitable foran urban environment where the movement of vehicles isaffected by driving instructions and obstacles that cause dis-connection in wireless signals. The communication betweenvehicles must be line of sight, and movements are limited torestrictions. To address these issues, these protocols use thedensity metric to find the most connected path between thesource and destination.
4. Full Road-Aware Routing
This section discusses recent full road awareness-basedrouting protocols. The protocols’ metrics, functions, andforwarding mechanisms are highlighted, along with the openresearch issues and challenges. Table 1 presents a comparison

International Journal of Distributed Sensor Networks 5
Table1:Fu
llroad-awarer
outin
gprotocols.
Protocol,year
GPG
R,2011[21]
CMGR,
2011
[22]
VLB
R,2012
[24]
RIVER
,2012[25]
GeoSV
R2013
[26]
SDR,
2013
[27]
VDLA
,2014[16]
iCARII,2014
[28]
RSBR
,2015[29]
Forw
arding
approach
Selectingthe
neighb
orclo
sestto
thed
estin
ation
with
inits
transm
issionrange
Greedy
forw
arding
Usin
gsparse
networkfor
furthest
neighb
orand
usingdensity
with
least
networkload
Greedyforw
arding
upto
near
anchor
point
Restr
icted
forw
arding
approach
Dire
ctional
forw
arding
alon
gther
oad
segm
ent
Greedy
forw
arding
Greedy
forw
arding
Greedy
forw
arding
Routing
metric
s
Road
topo
logy,
position,
direction,
andvelocity
Vehicular
density
and
routetrip
time
Networkload,
traffi
cdensity,
anddista
nce
Road
topo
logy,
network
conn
ectiv
ity,
leng
thof
path,and
distance
Vehicle
density
anddista
nce
Dire
ction,
relativ
evelo
city
and
transm
ission
range
Traffi
cdensity,
traffi
cload,and
distance
Network
conn
ectiv
ity,
expected
lifetim
e,and
deliverydelay
Distance,
velocity,and
transm
ission
range
Routing
metric
smeasurement
Usin
gbeacon
messages
containing
theg
ridcoordinates
Measures
throug
hroute
discoveryand
replying
tomessages
Determining
traffi
cdensity
andnetwork
load
inheader
asan
indicator
Usin
gweightin
gvalues,w
here
asm
allvalue
show
stheh
ighedge
reliability,alarge
values
howsthe
unreliablee
dge,
andmaxim
umvalues
howsthe
untraversablep
ath
Measurin
ghigh
erdensity
roads
Determiningthe
direction,
relativ
evelo
city,
and
transm
ission
range
Determining
traffi
cdensity,
load,and
distance
metric
sthroug
hNICP
inhello
packets
Perfo
rmingroad
segm
ent
evaluatio
nby
send
ingun
icast
packet
Vehicle
position
estim
ation
Load
balancing
No
No
Yes
No
No
No
Yes
No
No
Recovery
mechanism
No
Carry-and-
forw
ard
mechanism
Carry-and-
forw
ard
mechanism
and
switching
the
path
forload
balancing
Throug
hroute
recalculation
N/A
Recovery
throug
hRE
RRpackets
Recovery
throug
hrecalculatingthe
traffi
cdensity
Send
ingnew
path
requ
estto
locatio
ncenters
forrecovery
Recovery
throug
hspeed
adjustment
metho
d
Route
selection
Source-based
Source-based
Source-based
Source-based
Source-based
Source-based
Source-based
Source-based
Source-based
Traffi
caw
areness
Shortestpath
Relyingon
broadcast
area
Usin
g𝑘-sho
rtest
paths
Usin
gDijk
stra
algorithm
form
ost
reliablep
ath
Subgraph
betweensource
anddestinatio
n
Relyingon
broadcastarea
Minim
umho
pandshortest
path
Shortestpath
Shortestpath
Parameters
forsho
rtest
path
selection
Position,
direction,
andvelocity
N/A
Distance
and
statistic
aldensity
Network
conn
ectiv
ityand
road
topo
logy
Road
leng
thand
width
Transm
ission
range
Traffi
cdensity,
load,and
distance
Network
conn
ectiv
ityMinim
umroad
ratin
g
Protocols
used
for
comparis
on
GPS
R,GPC
R,and
GPU
RVA
DDand
A-ST
AR
GPS
RST
ARandGPS
RAO
DVandGPS
RRO
MSG
P,AO
DV,
EARP
,andD-LAR
GpsrJ+and
GPC
RGyT
AR,
GPS
R
P-GED
IR,
GyT
AR,
A-ST
AR,
and
GSR

6 International Journal of Distributed Sensor Networks
Table1:Con
tinued.
Protocol,year
GPG
R,2011[21]
CMGR,
2011
[22]
VLB
R,2012
[24]
RIVER
,2012[25]
GeoSV
R2013
[26]
SDR,
2013
[27]
VDLA
,2014[16]
iCARII,2014
[28]
RSBR
,2015[29]
Routeu
pdate
Recalculatingthe
grid
coordinates
calculationwhen
road
topo
logy
changes
Routeu
pdate
byroute
discovery
messages
Upd
atew
ith𝑘-sho
rtestp
aths
forb
alancing
networkload
Usin
gbeacon
messagesa
ndrecalculatingthe
forw
arding
path
atanchor
points
Noroute
maintenance
Throug
hcontrol
messages
Throug
henhancinghello
messages
Throug
hroad
sideu
nits
broadcastin
g
Routeu
pdateb
ybeacon
messages
Packet
deliveryratio
Higher
Higher
Higher
Higher
Higher
Higher
Higher
Higher
Not
measured
End-to-end
delay
Not
measured
Higherw
ithlowtraffi
cdensity
Lower
Higher
Lower
with
AODVand
high
erwith
GPS
RLo
wer
Lower
Lower
Lower
Network
overhead
Not
measured
Not
measured
Not
measured
Higher
Not
measured
Smaller
Not
measured
Not
measured
Not
measured

International Journal of Distributed Sensor Networks 7
of the protocols in terms of their routing metrics, forwardingand recovery methods, and performance.
4.1. Routing Process of Full Road-Aware Routing. The conceptbehind full road awareness is to determine the road charac-teristics for optimal routing in a network. The first protocolin this category is grid-based predictive geographical routing(GPGR) [21] which is based on the prediction mechanism ofmoving vehicles’ positions and mapping the data to generatethe road grids. The design assumes that vehicles move onlyalong the road grids and are equipped with location services(i.e., GPS) and a preloaded digital map for road information.The location services also provide traffic statistics such asdirection, velocity, and road topology.The protocol partitionsa geographical area into two-dimensional logical grids, wherea located vehicle at a position in a grid is capable oftransmitting the data to its eight neighbors’ grids.The beaconmessages contain grid coordinates rather than the vehicles’positions. By the floor function, every vehicle computes itscurrent grid coordinates. The sender node selects the nearernode with destination and predicts the future position byroad grids. To check the distance between two grids, theprotocol uses the Euclidean distance formula. Afterwards, theposition of the next relay candidate is set with the velocity anddirection of the relay candidate.
The connectivity-awareminimumdelay geographic rout-ing (CMGR) protocol [22] requires high connectivity forroute selection in a sparse network. In dense situations, theprotocol regulates the routes by suitable connectivity andselects the route with minimum delay. The protocol assumesthe availability of gateways which are randomly distributedalong the roadside and connected to the IPv6 network.The route discovery messages are used to construct fullpaths toward the gateways and intermediate vehicles attachtheir locations and rebroadcast the discovery messages. Thegateway receives severalmessages from the same vehicle nodevia different routes and then selects the most appropriateroute after the connectivity evaluation. In addition, for everyroute discovery message, the gateways send the receivingmessages to the source vehicle and then the decision istaken by the source node about the suitable route basedon the connectivity evaluation. Further, the CMGR protocolcontinuously checks the routes’ quality and most of the dataare forwarded from the favorable routes. As a result, there arehigher delays, congestion, and packet dropping issues in suchroutes. To eliminate the network bottleneck and enhance thenetwork throughput, a load balancing mechanism is needed[23].
VANET load balancing routing (VLBR), as proposed in[24], aims to balance the traffic between all possible con-nected paths by achieving congestion feedback from the net-work and switching to less congested routes by applying the𝑘-shortest path algorithms. The protocol performance wastested with some assumptions, where vehicles are equippedwith positioning services and a digital roadmap and roadsare dense with traffic. A city map is converted into a directedgraph and then the intersection sequence is calculated by thesource with each road weighted by its length and vehiculardensity. The protocol uses three phases. In the first phase,
each source node determines the list of intersections andstores the information in the packet header. In the secondphase, the protocol takes the forward decision and is selectedas a forwarder node between intersections. In the thirdphase, the protocol achieves feedback from the network andswitches the path in the case of precongestion. The frequentpath switching approach causes network delay and packetdrop issues in the network. Furthermore, the 𝑘-shortest pathalgorithm is not feasible due to its heavy computationalprocess leading to extra load in the network.
Reliable intervehicular routing (RIVER), as proposed in[25], is based on the utilization of an undirected graphthat presents the street layout and selects the route byassigning reliable ratings. RIVER determines the neighborsand destination positions by beaconing plus a preloadedstreet map. The protocol identifies a path and forwards themessage along the path, which is connected with a number ofgeographical locations. The protocol uses the piggybackingapproach to distribute the traffic information rather thanbroadcasting or flooding. Afterward, the protocol uses thereal-time information and recalculates the forwarding pathat anchor points. The protocol has two types of monitoring,namely, active and passive, whereby the probe messagesbelong to active trafficmonitoring and the receivingmessagesbelong to passive traffic monitoring. The probe messages areused to find out whether or not a message can be deliveredto a specific route. The vehicle node near a street vertexsends a probe message to the next hop which is projectedon the same vertex. The probe message is received by thenode that is closest to another vertex and at the same timeis returned to its original source which becomes aware of theconnected path. The weak point of this protocol is reliability,as every node assigns edge weight to every known edge byactive and passive monitoring messages. The Dijkstra leastweight algorithm is used to compute the consistent path.The protocol has computational complexity in terms of theweighting calculations.
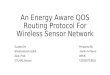
The geographic stateless VANET routing (GeoSVR) pro-tocol, as presented in [26], aims to improve packet forwardingand overcome the local maximum and disconnectivity issuesin a network. The protocol presents two algorithms, namely,restricted and optimal forwarding algorithms. The restrictedforwarding algorithm aims to solve unreliable wireless chan-nel issues, and the optimal forwarding algorithm aims toovercome the local maximum issues. Optimal forwardingdetermines the path and assigns a weighting value to everyroad and considers the vehicle density with destinationdistance in order to avoid sparse connectivity. The protocolselects the shortest path with the minimum weight valuethrough the Dijkstra algorithm and inserts the value into thepacket header. After path calculation, the restricted forward-ing algorithm is used to select a neighbor node in a restrictedrange for the next hop selection. This is because interference,communication distance, andweak signal strength issues leadto packet losses. Figure 2 illustrates examples of the optimaland restricted forwarding algorithms.TheDijkstra algorithmrequires high computational processes to navigate the com-plete weighted graph to find the connected path.Therefore, toaddress this issue, the protocol uses the subtraction method,

8 International Journal of Distributed Sensor Networks
B
A
r1
r2
DST
DSRC p2
p1
23
Figure 2: Examples of optimal and restricted forwarding in GeoSVR.
where it subtracts a connected subgraph from the entireweighted graph by using the source and destination positions.The protocol determines the junctions that are close to thedestination and constructs a rectangular subgraph instead ofa complete city map.
In [27], the stable direction-based routing (SDR) pro-tocol based on direction and path duration prediction wasproposed. In SDR, a node rebroadcasts the request messagebased on the neighbors’ and destination node’s positions.Next, the protocol labels each link with link expiration timeand considers the link stability. Finally, the path with thelongest expiration time is preferred as the most suitable path.SDR uses an improved flooding approach based on directionangle to decrease the effects of a broadcast storm in thenetwork. After the direction angle is attained, it is comparedwith the threshold value. If the value is smaller than thethreshold, the node will add its own address and rebroadcastthe packet. In this way, the protocol reduces the routediscovery messages due to broadcasting within directionangle nodes. The protocol also provides route maintenance:when a primary path that is used for routing breaks, thenode that notices that this link is broken sends the routeerror (RERR) packet to the source. Afterwards, the sourcenode selects the next optimal path. SDR reduces the time forfinding a new path and avoids the broken paths.
The traffic density and load-aware routing (VDLA) pro-tocol, as proposed in [16], is based on sequential intersectionselection to construct a route. The protocol determines thereal-time traffic load and density with destination distanceand collects all the information through a centralized mech-anism.The protocol computes these routing metrics, and thepackets avoid the disconnected roads with load balancing inorder to mitigate network congestion. The protocol has theability to reduce unnecessary hops by selecting the intermedi-ate junctions before a packet reaches a junction. For routing,VDLAprefers roads that arewell-connectedwith lower trafficloads. However, the protocol adds the network informationcollection packet (NICP) which includes a number of nodesand the total length of the buffer queue and total neighborsand transmits it from one end to the other. Figure 3 shows
the process of the VDLA protocol, where Vehicle A activatestheNICP. InRoadRS 2, the farthest neighborNodeB adds theinformation and the updated packet is forwarded to Node C.Node C repeats the samemethod until the packet reaches thedestination.The protocol suffers from network overhead dueto the addition of the NICP and the exchange of the completeroad information in the hello messages.
The connectivity-aware routing protocol (iCARII), asproposed in [28], aims to improve routing performanceby increasing delivery delay. The protocol uses the infras-tructure facilities and broadcasts one-hop beacon messagesto update the driving conditions periodically, with vehiclesequipped with GPS-based on-board units and roadside unitsfor Internet access. iCAR has four main components: roadsegment evaluation, path lifetime calculation, next junctionselection, and next hop selection. In road segment evaluation,the protocol dynamically senses the different parts of thenetwork in order to determine the real-time informationabout the network. For this phase, the protocol broadcastslightweight control packets to check the traversing roads andintersections. Next, the protocol calculates the lifetime inorder to determine the path lifetime and taken decision by theone-hop neighbors’ vehicles. After calculating the lifetime,the protocol selects the next junction and determines theexistence of the path toward the destination. If the packetreaches a disconnected road due to an unexpected delay, thenthe current candidate node sends a new path request to thelocation centers for recovery. In the last step, the protocolselects the next hop by the greedy forwarding approach.
The road selection-based routing protocol (RSBR), asproposed in [29], aims to select the best road by calculatingthe rating of the roads connected with a junction. Theprotocol assumes that every vehicle maintains a neighbortable by updating beacon messages. The vehicles are movingin the same direction andmaintain their location positions bya GPS service. The protocol solves the network gap problemby selecting the best road by predicting the gaps at an earlystage. If vehicles encounter the gaps while forwarding thedata, they switch to recovery mode and speed is adjustedaccording to backward and forward positions. The protocol

International Journal of Distributed Sensor Networks 9
ECB
D
F
Make the forwarddecision
RS 2
RS 1
RS 3
RS 4
Bt1
Ct2
D
5
8 1
5 9
12 2
4 12
16 3
3 16
18 4
3
t3Et4
Figure 3: Routing process of VDLA with traffic density and traffic load collection.
is evaluated by considering three performance metrics: end-to-end delay, number of hops, and network gap encounters.The protocol performs better in terms of delay compared toother state-of-the-art routing protocols and encounters fewergaps in the network. The vehicular environment is dynamicand, due to high velocity, the topology changes frequently.The protocol suffers from the network overhead issue due toits network gap detection mechanism.
4.2. Routing Metrics, Forwarding, and Recovery Mechanisms.GPGR utilizes four routing metrics: road topology, position,direction, and velocity. The geographical routing protocolsselect the node nearest to the destination as a relay node,and this leads to local maximum issues in the network. Tosolve this issue, GPGR selects the relay vehicle based on alocation prediction mechanism for the relay vehicle selectionprocess. The protocol selects the relay vehicle based onvehicle movement information (including velocity, direction,position, and road topology) to forward the data packetstoward the destination. The protocol then uses map datato generate a road grid and predict the exact movementpositions of vehicles for the selection process. The use ofthe exact moving positions and the prediction mechanismreduces the link breakage issue in VANETs. The informationon the number of nodes and the vehicle velocity is used toevaluate the packet delivery ratio. However, the protocol doesnot define a mechanism of recovery.
On the other hand, CMGR uses the changing networkstatus to forward the data packets and applies greedy forward-ing to forward the packets in the network.The protocol mea-sures the maximum and minimum vehicular density alongthe road and the connectivity of the routes in order to selectan optimal route. The number of neighbors (local density),
maximum and minimum average density rates, and the triptime are the metrics used for evaluation. Furthermore, thesemetrics differentiate the routes based on information abouttheir density through route discovery packets from the sourcenode to the gateway. The route with the least trip time andhighest density is taken into account as a high connectivityroute.The changing value of the vehicle density is attached tothe route discovery packets before broadcasting.The protocolcalculates the routing metrics in two steps as follows:
(1) For every vehicle in the network, the expected value ofthe vehicle density change rate is calculated by beaconmessages.
(2) After exchanging the beacon messages, the averageexpected values of the density are calculated.
After calculating the trip time from the route discoverymessages, the gateway computes the difference between thetime when the route discovery messages were received andthe time when the packets were generated. The protocoladopts the carry-and-forward approach to overcome thenetwork partition issues.
The VLBR aims to balance the traffic by attaining thenetwork load, traffic density, and distance between poten-tial connected paths. The protocol utilizes two forwardingmethods, which are based on network conditions. When aroad is sparse, the protocol selects the neighbor closest to thenext intersection and when a road is dense then the protocolfollows the same procedure with less network load comparedto other neighbors. The protocol computes the congestionfeedback from the network and switches to lower congestionroutes through the 𝑘-shortest path algorithm. The protocolhas the ability to balance the traffic with higher density andleast distance cost instead of only choosing the shortest path.

10 International Journal of Distributed Sensor Networks
The network load ismeasured by the contentionwindow size,which increases with each transmission trial. In addition, thecollision probability is computed with the help of the currentcontention window size and previous computed probability.Then, each vehicle node exchanges the computed probabilitywith its neighbors. If all the neighbor nodes have a highercollision probability compared with the specified thresholdthen it is considered to be a heavy loaded area. However, theauthors did not discuss the threshold value calculation or themeasurement of the collision probability for all nodes in thecase of highly dense roads. The protocol adopts the carry-and-forward approach for recovering the route and also thepath switching method for load balancing in the network.
RIVER utilizes greedy forwarding up to the near anchorpoint and uses a path that connects with a number ofgeographical locations and the distance to the destinationto forward the data packet. The protocol identifies neighbornodes by reference to information about the road topology,network connectivity, distance, and length of path towardsthe destination. The protocol determines the estimated net-work reliability and real-time traffic monitoring based onthe active and passive monitoring methods. Active trafficmonitoring refers to probe messages that move along aparticular street edge to compute the connectivity of thestreet edge. The real-time active traffic monitoring allows theprotocol to avoid routes with coverage area gaps. After activeinformation, the passive information is distributing to othernodes. Inmedium vehicle density, the protocol’s performanceis better compared to high density networks due to thecomputational complexity of calculating the street segments.The protocol uses an alternative route in the case of routefailure and performs recovery through route recalculation.
GeoSVR uses the restricted forwarding approach andutilizes vehicle density and distance to destination as routingmetrics. However, its authors assumed that the wider roadimplies higher probability of high density. The optimalforwarding path measures the weighting values of the roadedge by the width and length of the road. The vehicularenvironment is changing rapidly and is not constant withoutany guarantee of high density in wide roads. By using thisprotocol, the number of hops in the network is increased andthis leads to delay in the network. Moreover, the protocollacks a recovery mechanism in the case of route failure in thenetwork.
In order to find the best path in the network, SDRuses directional forwarding along the road segment andutilizes three routing metrics: direction, relative velocity, andtransmission range. The protocol uses an improved floodingmechanism by combining the position information with thedirection angle to reduce the effects of the broadcast stormissue in the network. The protocol then uses mobility infor-mation to estimate the link expiration time by reference to thetransmission range, position, and movement of vehicles. Inthe case of the localmaximum issue in a network, the protocoluses a recovery approach through sending RERR packets tothe source node about the suspected link and selecting thenext best path.
The VDLA uses greedy forwarding and utilizes the real-time traffic density, load, and distance for routing decisions.
Information on the vehicle density and traffic load is incorpo-rated by GPS and preloaded digital maps. The traffic load isdefined by the centralized method, whereby an informationcollection packet is initiated by nodes including the numberof nodes and total neighbors. After the information isobtained, a weight is calculated by distance and networkload to find the shortest route in the network. In the caseof local maximum, the protocol utilizes a recovery approachand recalculates the traffic density for the optimal route in thenetwork.
The iCARII protocol uses beacon messages that includecurrent location and mobility vectors to report drivingand traffic conditions periodically. The protocol greedilyforwards the packets toward the destination. The vehiclenode measures road segments by sending unicast packets totake the network connectivity into account and sends thereport to the location centers. The collected report is basedon the delivery delay of the packet and minimum expectedlifetime of the local network connectivity at the road. Theprotocol has computational complexity due to its deliverydelay calculation. In the case of route failure, the protocol hasa recovery mechanism, whereby the node sends a new pathrequest to the location centers to recover the route or findanother best route for data forwarding.
RSBR utilizes three routing metrics: distance, velocity,and transmission range. The protocol is similar to othergreedy protocols with some extra features. Every vehicleupdates and maintains its routing tables by beacon messages.The protocol determines the road condition before sendingthe data until the last junction is reached. Furthermore, theprotocol is based on the Dijkstra algorithm and calculates thedistance between the source and destination. The vehicularnetwork topologies are changing rapidly and are the causeof outdated data and network delay issues in the network.In a network gap situation, the protocol recovers the routethrough the speed adjustment method to adjust the speed ofvehicles.
4.3. Discussion and Comparison. This section presents adiscussion and comparison of the routing protocols explainedabove. The challenges and open issues are also discussed.
Most of the discussed RAR protocols consider the routeswith high connectivity and traffic density. These types ofroads are highly congested and create a bottleneck problemin the network. The load balancing property overcomes thisissue during the selection of a route toward the destination.The VLBR has load balancing capabilities but still has somelimitations. The protocol does not avoid network congestionon the used route and does not switch to another routewhen all the nodes reach the congestion threshold in the firstroute. Therefore, some routes might be congested and havebottleneck issues. In addition, the source node does not getany feedback about calculating and classifying the 𝑘-shortestpaths to update the first path. These limitations may result inpacket loss and delay issues in the network.
Most of the VANET routing protocols adopt the Dijkstraalgorithm to find the shortest path in the network. Thisapproach may not be feasible without determining the net-work and traffic status as input. In large city areas, these

International Journal of Distributed Sensor Networks 11
protocols need to traverse the complete weighted graph andthis leads to high computational complexity. To overcome thisissue, GeoSVR uses the subgraph mechanism. On the otherhand, only considering the shortest routes in the network andavoiding better network or traffic condition routes are nota better approach. To address this issue, most of the RARprotocols measure the routing metrics first and then look forthe shortest paths in the network.
As the RAR protocols use different routingmetrics to findthe optimal route in the network, assigning equal weightingfactors to these routing metrics might not be a suitablemethod. In addition, further investigation is needed to setthe suitable weighting ratio based on different traffic androad conditions. The reliance of some RAR protocols onthe traffic density measurement can lead to wrong indica-tions such as some areas being more congested especiallynear intersections and traffic lights. Therefore, only usingthe vehicular density measurement is not suitable withoutvehicular spatial distribution in the network. Taking vehicledensity with direction metrics into account will lead to betterperformance and lower connection breakage probabilitycompared to routes with the same density, as stated in [30].Some RAR protocols, such as VLBR and iCARII, utilizestatistical density. However, statistical density is not suitabledue to the highly dynamic environment as stated in [31].The periodic route discovery in CMGR and frequent routerecalculation in VDLA lead to high network overhead andaffect the packet delivery ratio in the network. Therefore, thetimer or route lifetime is sufficient to overcome unnecessaryrecalculation.
Many of the full RAR protocols discussed above adopt thecarry-and-forward approach for solving the network discon-nection issues. However, these mechanisms are applied whena vehicle is far away from the route destination. In CMGR,this approach applies when the vehicles are approachingjunctions or turning situations.
In order to overcome RAR protocol issues, some openissues are identified as follows:
(i) The VANET environment is dynamic in nature androute stability is still an issue. The main question ishow to initiate route recalculation only when it isneeded in the network and how to determine trafficconditions and overcome routing overhead.
(ii) In the case of local maximum and network gap issues,the route discovery and rebroadcasting lead to highnetwork overhead and take time.
(iii) The routing protocols discussed above have beentested in a simulation environment or mobility gen-erator environment. The simulation environment islimited in terms of the number of vehicle nodesand area. On the other hand, the real vehicularenvironment is denser, and the traffic is denser for theroute discovery process.
These challenges open the gate to the further investigationof measures, route discovery mechanisms, and networkperformance in order to solve the local maximum, broadcaststorm, and network gap issues.
5. Intersection-Based Road-Aware Routing
This section presents the most recent intersection-basedroad-aware routing protocols and discusses their routingoperations and forwarding mechanisms as well as the chal-lenges and issues they pose in a network. Table 2 summarizesthe characteristics and performance of protocols in compar-ison with other routing protocols in terms of the end-to-enddelay and packet delivery ratio.
5.1. Routing Process of Intersection-Aware Routing. Intersec-tion-based routing (IBR) was introduced in [32] to findthe shortest routing path with the shortest packet delay.IBR is based on the greedy approach for straight roads anddetermines the transmission range as an object of relay.Whenthe source node is at the intersection, the protocol dependson the routing and vehicle moving direction in order toforward the data packet to the destination. Furthermore,in this protocol the vehicles only carry the same directionpackets and the protocol has four possible routing conditions:one vehicle node exists in the next road segment, there is noneighbor at the intersection, the vehicle moving direction isdifferent from the packet transfer direction, and the packetarrives at the intersection. The protocol estimates the packetdelay of the road segment and the end-to-end delay of therouting path and calculates the forwarding delay with highdensity.
Junction-based routing (JBR), as proposed in [33], utilizesthe selective greedy forwarding approach up to the node thatis located at the intersection and is close to the destination.The protocol divides the vehicle nodes into simple andcoordinator nodes. In the first phase, when the simple nodewants to send the packet, the protocol checks the nodesthat are closer to the destination. If the protocol finds thecoordinator node, it is chosen as the next hop and, if not,a simple node is selected. When a packet arrives at anintersection, the protocol checks the qualified coordinatornodes and selects the coordinator node that is closest to thedestination.
The first version of iCAR was presented in [34] basedon the delivery delay for each road and real-time vehiculartraffic density. The protocol is unicast and designed formultihop vehicular applications such as file sharing, onlineadvertisements, and chatting applications. In this protocol,when a node is reaching an intersection, the next road isevaluated and selected based on the highest density with leastdelay. The protocol is efficient for dense urban areas, where itselects the next junction to forward the data packets towardthe destination.
In [4], a connectivity-aware intersection-based routing(CAIR) protocol was proposed as an intersection-based pro-tocol that depends on the higher probability of connectivityand lower delay. CAIR selects intersections dynamicallyby the prediction-based greedy approach to forward datatoward the destination. The intersection selection is basedon the rectangle area searching method, where the positionof source and destination nodes and restricted searchingarea are bounded by ellipse. The protocol has four mainfunctions: checking the vehicular density to select the road

12 International Journal of Distributed Sensor Networks
Table 2: Intersection-based road-aware routing protocols.
Protocol, year IBR, 2011 [32] JBR, 2013 [33] iCAR, 2013 [34] CAIR, 2014 [4] IRQV, 2015 [35]
Routing metrics
Packet transferand movingdirection ofvehicles,
transmissionrange, and
traffic density
Transmissionrange, distance,
direction
Distance,vehicular
density, networkload, andvehicular
distribution
Direction,connectivity,and trafficdensity
Connectivity,transmission
delay, direction,and distance
Routing metricsmeasurement
Commenceswhen vehicle
forwarder nodeleaves road
Commenceswhen vehicle
forwarder nodeleaves road
Initiated whenvalidity period
expires
Initiated whenvalidity period
expires
Initiated whenvalidity period
expires
Load balancing No No No No No
Recoverymechanism
Carry-and-forwardstrategy
Recoverythrough smallerminimum angle
method
Store-carry-and-forward
Store-carry-and-forward
Carry-and-forward
mechanism
Route selectionBased on trafficconditions at theintersections
Based oncoordinator andsimple node
Next-intersectionselectionstrategy
Next-intersectionselectionthroughimprovedgreedy
forwardingstrategy
Next-intersectionselection
through QoSparameters
Protocols usedfor comparison
VADD andGyTAR GPCR GyTAR and
GPSRGPSR, CAR,and JBR GSR and CAR
Packet deliveryratio High High High High High
End-to-enddelay Low Low Low Low Low
Networkoverhead Low Not measured Higher Higher Not measured
segment by taking connectivity and delay into account, usingdirectional forwarding to decrease the average transmissiondelay, performing on-demand position forecasting for thenext hop relay selection, and executing a junction-basedforwarding strategy.
An intersection-based routing with quality of services(IRQV) was proposed in [35], based on ant colony optimiza-tion. The protocol is based on three processes: intersectionselection, network exploration with quality of service (QoS),and path selection. The protocol is dynamic in nature andselects the next intersection by adopting the greedy forward-ing mechanism to forward the data toward the destination.Furthermore, the protocol does not rely on complete routingpaths; it only explores the terminal at an intersection. Theauthor claimed that, by adopting this mechanism, the pro-tocol increases the routing path stability, reduces redundantrouting, and relieves channel congestion in highly densescenarios. In addition, the forward ants (vehicle nodes) ofIRQV shorten the network exploration time and decrease theinstant traffic information effects.
5.2. Routing Metrics, Forwarding, and Recovery Mechanisms.TheIBRprotocol is based on the carry-and-forward approachand avoids reverse moving direction packets and checksthe direction of vehicles and routing path with traffic androuting delays for each road segment. For forwarding thedata in the network, each vehicle maintains its road segmenttable including the road segment ID, latest update time, andnumber of vehicles in the segment. The IBR then follows thetwo road models (straight road and intersection) and adoptsgreedy forwarding, transmission range, routing direction ofpacket, and vehicle moving direction in order to forward thedata packets toward the destination.The complete forwardingprocess of IBR is shown in Figure 4. The protocol adopts thecarry-and-forward strategy to deal with uneven distributionscenarios.
JBR adopts the direction and transmission range, as inIBR, with the selective greedy forwarding approach. Theprotocol divides the vehicle nodes into simple and coor-dinator nodes, checks the node closest to the destination,and forwards the packet accordingly. If local optimum is

International Journal of Distributed Sensor Networks 13
Packet Packet
DestinationMoving direction of vehicle
Source Destination
Low densityHigh density
ImRSNext RScurrent
Figure 4: Moving direction and high and low traffic density estimations in IBR.
reached, the protocol uses a recovery mechanism based onthe minimum angle method until the packet is forwarded toa node that is closer to the destination.
iCAR uses a control packet (CP). It does not form a fixedcell and forwards the CP along the street to forward the pack-ets. In addition, based on the connectivity of the road andnumber of vehicles, the CP indicates the next intersection.The routing metrics are measured by the validity period ofgiven road segment and predict the time of disconnection.When the CP is received at an intersection, the closer vehiclegenerates the updated score.
The updated score is then broadcast using the beaconingapproach and sent back to the location of the CP; the roadscore is setwith zero value and considered to be disconnected.iCAR adopts an improved greedy forwarding approach toforward the packets between intersections and also looks atthe highest received signal strength indication.
CAIR uses the direction, connectivity, and traffic densityto find a robust route in the urban environment.The protocoldetermines the rectangle restricted area, where the sourceand destination nodes are in line with the axis and an ellipseshape could be formed. In this context, each intersection isinvolved in the routing process and the routing path couldbe determined. In addition, if the protocol does not find thepath, the route discovery process is initiated and the sourcenode sends the request packets (RREQ) within the searcharea. The RREQ packets contain traffic density, road length,number of lanes, and intersection information and set up atimer and store this route in a cache. In addition, when thetimer expires, the destination node stops receiving the RREQmessages and determines the route probability based on theconnectivity and packet delay by timestamps.
The IRQV uses connectivity, transmission delay, direc-tion, and distance to find the best route in the network.The source node checks the direction of the communicationterminal (CT) and the distance between the CT and its neigh-boring intersection to determine the terminal intersection.The highest grade terminal intersection is selected, wherebythe source node sends RREQmessages to check the available
route by forward and backward ants. The data packets arethen dynamically forwarded to the next intersection and thegreedy carry-and-forward algorithm is used to recover andrelay the data between two intersections.
5.3. Discussion and Comparison. The IBR protocol dependson the weighting adjustment of roads to find the optimalroute in the network. Weighting factors are assigned torouting metrics in order to create the weighting score forroads. These weighting factors have positive and negativeeffects on routing decisions. In addition, the weightingvalue of routing metrics (density, connectivity, and distance)depends on the protocol design and evaluation metrics.However, the weighting calculation is not carried out inthe aforementioned protocols. The measurement of routingmetrics is another significant process for routing. However,this process leads to network overhead and computationalcomplexity issues. Therefore, this process needs to be donewhen it is essential and when a measurement is requestedsuch as in iCAR, CAIR, and IRQV. Thus, the measurementresults must be updated for better routing decisions atintersections with the lowest network overhead. In the iCARprotocol, the time validity function for routing metrics isvery effective to deal with outdated measurements and isbetter than fixed validity intervals. A few IBR protocolsconsider road transmission delay as an indicator of networkconnectivity. However, the transmission delay is not onlycaused by network disconnections, it can also be causedby network load. Thus, in order to measure real-time roadconnectivity, the link lifetime is also taken into account.
Simple greedy approaches in routing protocols may resultin packet dropping due to the high mobility of vehicles.The improved and selective greedy methods overcome thisissue (as in JBR). Another important point relates to the useof prediction-based strategies for neighbor positions, whichis not always accurate compared to updated routing tables.Most intersection-based RAR protocols depend on the carry-and-forward approach for the recovery process. However,this approach leads to network delay issues. Therefore, some

14 International Journal of Distributed Sensor Networks
Table 3: Twofold road-aware routing protocols.
Protocol, year TAR, 2011 [36] TARGET, 2012 [37] IG, 2015 [38]Routing metrics onstraight road
Traffic density, velocity,and direction Distance Direction and forwarding
progressRouting metrics at theintersection
Large volume of vehicleaverage neighbor
Node density, link quality,and distance Traffic density and distance
Routing metricsmeasurement
Initiated when fixedinterval period expires
Commences when vehicleforwarder node leaves road
Initiated when fixedinterval period expires
Recovery mechanism Carry-and-forwardstrategy
Checks the link quality andreturns data to intersection
node
Route selection Greedy forwardingstrategy Greedy forwarding strategy Greedy forwarding strategy
Protocols used forcomparison GPSR GPSR RBVT-R, AODV, and
GPCRPacket delivery ratio High High HighEnd-to-end delay Low Low LowNetwork overhead Not measured Not measured Not measured
other strategies must be considered in future research. Thenetwork load is another important criterion to avoid conges-tion issues in the network. The network load is not includedin any of the aforementioned intersection protocols.
6. Twofold Decision Routing
The most recent twofold RAR protocols are discussed inthis section. The discussion is based on an overview of theirrouting processes, forwarding strategies, routing metrics,and recovery techniques, followed by a comparison of theircharacteristics and performance. Table 3 presents a summaryof the twofold RAR protocols.
6.1. Routing Process of Twofold Decision Routing. Amongthe recent twofold RAR protocols, the traffic-aware routing(TAR) protocol [36] is based on the selection of roads usingthe vehicle average neighbor volume for forwarding thedata packets. The protocol assumes that the vehicle nodesare equipped with a simple electronic map and are able tocollect the road topology information. Vehicles are awareof their own location and the destination location throughlocation-based services.TheTARprotocol computes the roadtraffic volume and selects the greatest value path for the dataforwarding process.Theprotocol has twomodes of operation,namely, the inside road (or between intersection) and at theintersection.When the forwarding node is at the intersection,it can check the high average neighbor nodes and select aforwarding path. When the forwarding node is in betweenintersections, it uses the greedy strategy.
A similar routing protocol known as traffic-aware geo-graphical routing (TARGET) was proposed in [37]. The pro-tocol consists of three basic modules: intersection selection,data delivery, and recovery strategies. The protocol makes itsdecision with high density areas instead of low density areas.In this protocol, the nodes are divided into ordinary andjunction nodes. One monitor is assigned for each junction.
The junction node, which is closest to the centre, is setas a monitor for communication with other neighbors. Itmonitors the traffic information periodically and broadcaststo other junction nodes. Furthermore, every monitor nodemaintains the neighbor table and analyzes the link quality andnode density.
As proposed in [38], improved geographical (IG) routingestablishes communication between vehicle nodes. In thetesting of the protocol, the author assumed that all vehicleswere equipped with GPS and digital road maps and that thevehicles were aware of the position and direction informationby beacon messages. In this protocol, the routing is based onmultiple metrics to ensure the wireless link stability, relia-bility, and packet forwarding progress. The IG protocol hastwo modes of routing, namely, packet forwarding betweenintersections and at the intersection. Through an improvedgreedymode, the protocol forwards data packets in the urbanscenario.
6.2. Routing Metrics Measurement, Forwarding, and RecoveryMechanisms. The TAR protocol uses the vehicle averageneighbor volume to perceive information at the intersectionand selects the greatest value path for data forwarding. Trafficdensity is a very significant routing metric for collecting theinformation. The traffic density is calculated through gath-ering the number of vehicle neighbors and computing thedensity average as adopted in TAR, IG, and TARGET. Whenthe node is in between intersections, the protocol measuresvehicle velocity, current road ID, and position information.The greedy forwarding strategy is adopted to select the closestnode to the next junction as a next hop. If the node isnot found, then the carry-and-forward strategy is applied tomove forward until it finds a node. The protocol has someconditions to calculate the next road characteristics such asneighbor node estimation and last neighbor estimation.
On the other hand, TARGET depends on node densitywith the link quality of each road as the routing metrics.

International Journal of Distributed Sensor Networks 15
The protocol maintains the routing table with informationabout the straight distance to every neighbor intersection,the time the last defective packet arrived for each road, andthe node density of each road. TARGET uses the Dijkstraalgorithm to select the next shorter path intersection whenthe node is located between intersections. Furthermore, whena node is at the intersection, the node excludes the uncountedroads and selects the next forwarder. In the recovery strategy,if data are not delivered due to link breakage, it returnsto the last junction. That junction is considered to be anunconnected road and another intersection is selected fordata forwarding.
In the IG protocol, the routing metrics are different inbetween intersections and at the intersection. Direction andforwarding progress are taken into account when the node isbetween intersections. When not at the intersection, the pro-tocol uses traffic density and distance toward destination.Theprotocol is based on multimetric type for the harsh vehicularenvironment, where a single metric is not as effective for dataforwarding.The protocol has a score functionmechanism fordetermining the routing metrics and a beacon reception ratemechanism for measuring the channel quality.
6.3. Discussion and Comparison. This section presents acomparison of twofold decision routing protocols and a dis-cussion of their limitations and issues. The main discussionpoints are as follows:
(1) In the aforementioned twofold decision protocols, therouting decisions are different in between intersec-tions and at the intersection. This strategy is adopteddue to the harsh vehicular environment, where oneroutingmetric is not as effective.The different routingmetrics should have an effective strategy for measure-ment. In addition, the selection of routing metrics isanother significant criterion during the developmentof these types of strategies.
(2) This type of strategy lead to network overhead andcomputational complexities but it depends on therouting metrics selection and processes.
(3) These protocols have the same strategies as junction-aware routing but with different routing metrics.
(4) Another issue relates to the calculation of the routingmetrics: this process leads to network overhead andhas not been investigated in the aforementionedprotocols.
(5) The real road environments are dynamic in nature,where the roads are often short between intersec-tions. In these cases, these protocols suffer fromcomputational complexity to divert their operationalprocesses. However, there is a need to test theseprotocols in a real test environment.
After the brief comparison of the twofold decision routingprotocols, the following points can be concluded:
(1) Twofold decision routing protocols are more effectivecompared with intersection-aware routing protocols,due to different routing metric strategies.
(2) In some protocols, the network overhead and com-putational complexity are not taken into account.However, these measurements are very significant inthese protocols.
7. Traffic Density-Based Routing
This section presents the most recent traffic density-basedrouting protocols. The routing metrics, forwarding, andrecovery strategies are discussed, followed by a comparison.Table 4 presents a comparison of the protocols and theirperformance.
7.1. Density-Based Routing Protocol Processes. Road or trafficdensity is one of the important metrics to evaluate forrouting in a network. To this end, the density-aware routingusing road hierarchy (DAR-RH) was proposed in [39]. TheDAR-RH protocol exploits the hierarchical road informationfor forwarding the data towards the destination. Further,the protocol uses hierarchies to classify the city roads andgreedily forward the packets to the destination. The roadhierarchy is categorized into freeway, trunk, secondary road,and township roads.The protocol computes the shortest pathinformation in every hierarchy and calculates the shortestpath.
The density-aware reliable broadcasting protocol(DECA), as proposed in [40], is based on the utilizationof one-hop local density information to forward the datatoward the destination. The protocol selects the neighbornode with the highest density, rebroadcasts the message, andmaximizes the number of neighbor nodes. Further, if theselected node does not have higher density, then anothernode with higher density is selected thus avoiding the loopproblem.
In [41], a real-time traffic density protocol was proposedfor reliable and fast communication in urban scenarios. Inthis protocol, every vehicle node calculates the traffic densityof the road and establishes a reliable route towards thedestination. Each vehicle periodically transmits the beaconmessages containing the direction and the total number ofreverse cars (TRC) with the position. The TRC estimates theroad vehicle density and sends a beacon message to its one-hop neighbor. Figure 5 presents an example of a road layoutwith various road densities in the real-time traffic densityprotocol.
An adoptive routing protocol based on QoS and trafficdensity (ARP-QD) was proposed in [42] to find the bestpath by determining the hop count and link duration ina network. The protocol also uses an adaptive neighbordiscovery protocol to determine the local traffic density.The protocol assumes that destinations are always located atintersections and vehicles are equipped with GPS services.The protocol uses connectivity and distance (CDP) metrics.When a node is at the road segment, it selects the nexthop with parallel direction; if a node is at the intersection,it selects the next segment first and then decides the nexthop. The candidate intersections are defined as the adjacentintersection with the shortest path lengths, where the vehiclenode is formularized along the road to find the best routing

16 International Journal of Distributed Sensor Networks
Table 4: Comparison of traffic density-based road-aware routing protocols.
Protocol, year DAR-RH, 2009 [39] DECA, 2010 [40]Real-time road
vehicle density, 2013[41]
ARP-QD, 2015 [42]
Routing metrics Traffic density anddistance Traffic density Traffic density and
direction
Traffic density,direction, and
network connectivity
Routing metricsmeasurement
Commences whenvehicle forwardernode leaves road
Initiated when fixedinterval period
expires
Commences whenvehicle forwardernode leaves road
Through segment,connectivity, anddistance-based
weighting function
Recovery mechanism The test packet is sentvia a higher hierarchy
Buffers the messageand randomly sets awaiting timeout
N/A Carry-and-forwardmechanism
Route selection Source-based Source-based Source-based Source-basedProtocols used forcomparison GPSR AckPBSM and DECA
+ ABI GPSR GPSR and ROMSGP
Packet delivery ratio Higher Not measured High HigherEnd-to-end delay Low Not measured Not measured AverageNetwork overhead Not measured Low Low Not measured
Source
Destination
GPSRProposed scheme
Figure 5: Road layout examplewith different traffic densities in real-time traffic density protocol.
path.The protocol selects themost connected path in order toavoid any disconnectivity. Once the next segment is selected,the direction of the packet delivery is determined. To findthe best route in a network, the protocol uses a hop-by-hopstrategy. The protocol has a higher data delivery ratio andlow end-to-end delay compared with GPSR and ROMSGP.However, its assumption that the destination is always at anintersection is not realistic.
7.2. Routing Metrics Measurement, Forwarding, and Recov-ery Mechanisms. The routing metrics of the DAR-RH, dis-tributed efficient clustering approach (DECA), and real-timeroad density protocols are traffic density measurement andestimation, where the number of vehicles is measured withthe road per unit length. In some studies, researchers havemeasured traffic density with the number of vehicles in acertain area of a city [43, 44]. However, vehicle density is asignificant traffic condition metric for routing in a network.
DAR-RH uses road hierarchies and discovers the routeby calculating the shortest path in a spatial model. Forthe shortest path, the protocol uses distance and real-timetraffic density by testing the packets in a unicast manner.These packets gather the traffic density information at everyintermediate node until reaching the destination. In the caseof the local maximum issue, the protocol transfers packetsalong another route. The protocol adopts greedy forwardingto check each intermediate waypoint as a temporary destina-tion.
The density-aware reliable broadcasting protocol useslocal density information to select the next rebroadcastingnode with the store-and-forward strategy. The neighbor withthe highest density rebroadcasts the messages and the otherneighbor nodes store the messages and set a waiting timeout.If a forwarder node faces the channel error or collisionissues, the other neighbor nodes rebroadcast the messages.DECA has two neighbor lists, known as the broadcast listand neighbor list, and maintains the identifiers for all one-hop neighbors and their local density. DECA overcomesthe broadcast storm problem, where a large number of datamessages are dropped and the protocol needs to retransmitmessages for reliable status. Further, in this context, DECAuses the highest beacon interval for fast dissemination bydynamically calculating the adaptive beacon interval.

International Journal of Distributed Sensor Networks 17
The real-time road vehicle density protocol providesstable routes by using high vehicle density as a routingmetric. Each vehicle node periodically transmits beaconmessages containing the direction, TRC,movement, and ownlocation. The TRC value is computed to estimate the roadvehicle density and sends its value to the one-hop neighbors.Whenever this value is received the “cars” field value isincreased by one. For searching the routes, the protocol usesrequest and reply messages.
The ARP-QD uses a novel metric for selecting the bestnext hop in a network such as direction, relative speed, anddistance between the candidate and neighbor node and setsthe connectivity and distance (CDP) value. The node withthe largest CDP is selected as the next hop. In the caseof routing path failures, the protocol adopts the carry-and-forward recovery strategy. In the carry-and-forward strategy,the protocol carries the packet until another node movesinto transmission range to transfer the packet. In orderto complete the routing process, ARP-QD uses the short-est length road segment and intersection and determinesthree routing metrics (traffic density, direction, and networkconnectivity). These routing metrics are combined in twomethods: connectivity and distance and segment selectionweight. With the help of these two methods, the protocolobtains a qualified path to fulfill the QoS requirements andbalance the path efficiency and stability. The protocol utilizesa recovery strategy with the carry-and-forward approachbased on the local vehicle density information.
7.3. Discussion and Comparison. The vehicle density estima-tion protocols have some limitations in the field of vehicularnetworks due to high variable density and high mobility.These protocols are based on VANET traffic flows and com-munication properties. However, the traffic density strategieshave the following issues:
(1) These traffic density-based routing protocols usebeacon messages to update the neighbor tables. Thefrequent broadcasting of these messages leads tocommunication overhead.
(2) The vehicle density is more condensed near trafficlights and intersections compared to other roads.These situations are the cause of wrong indications ofhigh density for the protocols.
(3) Some density-based routing protocols do not includethe vehicle direction in the calculation of the vehicledensity. Basically, the vehicle direction toward thedestination with high vehicle density is projected forrouting and is considered to be a favorable metrics.However, without vehicle direction, the route with thesame vehicle density but in two directions has higherbreakage probability [30]. DECA only uses vehicledensity and suffers more from this issue compared tothe DAR-RH, ARP-QD, and real-time protocols.
As shown in the summary of the traffic density estima-tion-based routing protocols (Table 4), these protocols sufferfrom network overhead. To solve this issue, the protocolsshould have feasible routing metrics to deal with a dynamic
environment. Most of the protocols in this category are basedon the greedy forwarding approach and face local maximumissues in the network, where the vehicle nodes do not find thenodes that are close to the destination.
8. Conclusion
This review presented an overview of RAR protocols forVANETs. The main objective was to present a compari-son of recent protocols of this type and categorize them,according to different aspects, into full RAR, intersection-aware, twofold routing, and density-based routing protocols.Further, for every category, the routing metrics, processes,and forwarding mechanism and recovery approaches wereinspected. RAR protocols belong to the category of geograph-ical routing and are designed to address the geographicalrouting issues.The review also presented a comparison of theRAR protocols and a discussion of their challenges.
RAR protocols are more efficient for the dynamic andhighly mobile vehicular environment. However, the mainchallenge in these protocols is how to achieve sufficientrouting with lower network overhead. Thus, the routingmetrics and their measurements play a significant role inthis regard and need more improvement. Moreover, the RARprotocols must be more aware of road conditions.
Competing Interests
The authors declare that they have no competing interests.
Acknowledgments
The authors would like to extend their sincere appreciation tothe Deanship of Scientific Research at King Saud Universityfor funding this research. The research is supported byMinistry of Education Malaysia (MOE) and conducted incollaboration with Research Management Center (RMC)at Universiti Teknologi Malaysia (UTM) under VOT no.QJ130000.2528.06H00.
References
[1] M. J. Piran, G. R. Murthy, and G. P. Babu, “Vehicular ad hocand sensor networks; principles and challenges,” InternationalJournal of Ad Hoc, Sensor & Ubiquitous Computing, vol. 2, no.2, pp. 38–49, 2011.
[2] C. Tripp-Barba, L. Urquiza-Aguiar, M. A. Igartua et al., “Amultimetric, map-aware routing protocol for VANETs inUrbanAreas,” Sensors, vol. 14, no. 2, pp. 2199–2224, 2014.
[3] M. Amadeo, C. Campolo, and A. Molinaro, “EnhancingIEEE 802.11p/WAVE to provide infotainment applications inVANETs,” Ad Hoc Networks, vol. 10, no. 2, pp. 253–269, 2012.
[4] C. Chen, Y. Jin, Q. Pei, and N. Zhang, “A connectivity-awareintersection-based routing in VANETs,” EURASIP Journal onWireless Communications and Networking, vol. 2014, article 42,16 pages, 2014.
[5] S. Al-Sultan, M. M. Al-Doori, A. H. Al-Bayatti, and H. Zedan,“A comprehensive survey on vehicular Ad Hoc network,”Journal of Network and Computer Applications, vol. 37, no. 1, pp.380–392, 2014.

18 International Journal of Distributed Sensor Networks
[6] S. Singh and S. Agrawal, “VANET routing protocols: issues andchallenges,” in Proceedings of the Recent Advances in Engineeringand Computational Sciences (RAECS ’14), pp. 1–5, Chandigarh,India, March 2014.
[7] K. N. Qureshi, A. H. Abdullah, and R. Yusof, “Position-basedrouting protocols of vehicular Ad hoc networks & applicabilityin typical road situation,” Life Science Journal, vol. 10, no. 4, pp.905–913, 2013.
[8] A. Fonseca and T. Vazao, “Applicability of position-based rout-ing for VANET in highways and urban environment,” Journal ofNetwork and Computer Applications, vol. 36, no. 3, pp. 961–973,2013.
[9] A. Bazzi and A. Zanella, “Position based routing in crowdsensing vehicular networks,”AdHoc Networks, vol. 36, pp. 409–424, 2016.
[10] S. M. Bilal, C. J. Bernardos, and C. Guerrero, “Position-basedrouting in vehicular networks: a survey,” Journal of Network andComputer Applications, vol. 36, no. 2, pp. 685–697, 2013.
[11] K. N. Qureshi and A. H. Abdullah, “Localization-based systemchallenges in vehicular Ad Hoc networks: survey,” Smart Com-puting Review, vol. 4, pp. 515–528, 2014.
[12] L. K. Waghdhare, T. Nagrare, and K. Gudadhe, “Review onrouting protocol for vehicular ad-hoc network,” InternationalJournal of Advanced Research in Computer Science and SoftwareEngineering, vol. 2, 2012.
[13] F. Cadger, K. Curran, J. Santos, and S. Moffett, “A surveyof geographical routing in wireless ad-hoc networks,” IEEECommunications Surveys and Tutorials, vol. 15, no. 2, pp. 621–653, 2013.
[14] A. Dua, N. Kumar, and S. Bawa, “A systematic review onrouting protocols for vehicular Ad Hoc networks,” VehicularCommunications, vol. 1, no. 1, pp. 33–52, 2014.
[15] B. Karp and H.-T. Kung, “GPSR: greedy perimeter statelessrouting for wireless networks,” in Proceedings of the 6th AnnualInternational Conference on Mobile Computing and Networking(MOBICOM ’00), pp. 243–254, August 2000.
[16] C. Li, C. Zhao, L. Zhu, H. Lin, and J. Li, “Geographic routingprotocol for vehicular ad hoc networks in city scenarios: aproposal and analysis,” International Journal of CommunicationSystems, vol. 27, no. 12, pp. 4126–4143, 2014.
[17] S. Parvin, M. A. Sarram, G. Mirjalily, and F. Adibnia, “Asurvey on void handling techniques for geographic routing inVANET network,” International Journal of Grid & DistributedComputing, vol. 8, no. 2, pp. 101–114, 2015.
[18] A. Pascale, M. Nicoli, and U. Spagnolini, “Cooperative bayesianestimation of vehicular traffic in large-scale networks,” IEEETransactions on Intelligent Transportation Systems, vol. 15, no.5, pp. 2074–2088, 2014.
[19] M. Al-Shugran, O. Ghazali, S. Hassan, K. Nisar, and A. S.M. Arif, “A qualitative comparison evaluation of the greedyforwarding strategies in mobile Ad Hoc network,” Journal ofNetwork and Computer Applications, vol. 36, no. 2, pp. 887–897,2013.
[20] J. Liu, J.Wan, Q.Wang, P. Deng, K. Zhou, and Y. Qiao, “A surveyon position-based routing for vehicular ad hoc networks,”Telecommunication Systems, pp. 1–16, 2015.
[21] S.-H. Cha and K.-W. Lee, “Location prediction for grid-basedgeographical routing in vehicular ad-hoc networks,” inGrid andDistributed Computing, pp. 35–41, Springer, 2011.
[22] K. Shafiee and V. C. M. Leung, “Connectivity-aware minimum-delay geographic routing with vehicle tracking in VANETs,” AdHoc Networks, vol. 9, no. 2, pp. 131–141, 2011.
[23] D. Wu, J. Luo, R. Li, and A. Regan, “Geographic load balancingrouting in hybrid vehicular ad hoc networks,” in Proceedingsof the 14th IEEE International Intelligent Transportation SystemsConference (ITSC ’11), pp. 2057–2062, Washington, DC, USA,October 2011.
[24] H. T. Hashemi and S. Khorsandi, “Load balanced vanet routingin city environments,” in Proceedings of the IEEE 75th VehicularTechnology Conference (VTC ’12), pp. 1–6, Yokohama, Japan,May 2012.
[25] J. Bernsen and D. Manivannan, “RIVER: a reliable inter-vehicular routing protocol for vehicular ad hoc networks,”Computer Networks, vol. 56, no. 17, pp. 3795–3807, 2012.
[26] Y. Xiang, Z. Liu, R. Liu,W. Sun, andW.Wang, “GeoSVR: amap-based stateless VANET routing,” Ad Hoc Networks, vol. 11, no. 7,pp. 2125–2135, 2013.
[27] C. Liu, Y. Shu, O. Yang, Z. Xia, and R. Xia, “SDR: a stabledirection-based routing for vehicular ad hoc networks,”WirelessPersonal Communications, vol. 73, no. 3, pp. 1289–1308, 2013.
[28] N. Alsharif andX. S. Shen, “ICARII: intersection-based connec-tivity aware routing in vehicular networks,” in Proceedings of the1st IEEE International Conference on Communications (ICC ’14),pp. 2731–2735, New South Wales, Australia, June 2014.
[29] S. K. Bhoi and P. M. Khilar, “A road selection based routingprotocol for vehicular ad hoc network,” Wireless PersonalCommunications, vol. 83, no. 4, pp. 2463–2483, 2015.
[30] R. Oliveira, M. Luısa,b, A. Furtadoa, L. Bernardoa, R. Dinisa,b,and P. Pintoa, “Improving path duration in high mobilityvehicular ad hoc networks,” Ad Hoc Networks, vol. 11, no. 1, pp.89–103, 2013.
[31] K. N. Qureshi and A. H. Abdullah, “Localization-based systemchallenges in vehicular ad hoc networks: survey,” The SmartComputing Review, vol. 4, no. 6, pp. 515–528, 2014.
[32] L.-D. Chou, J.-Y. Yang, Y.-C. Hsieh, D.-C. Chang, and C.-F. Tung, “Intersection-based routing protocol for VANETs,”Wireless Personal Communications, vol. 60, no. 1, pp. 105–124,2011.
[33] S. Tsiachris, G. Koltsidas, and F.-N. Pavlidou, “Junction-basedgeographic routing algorithm for vehicular ad hoc networks,”Wireless Personal Communications, vol. 71, no. 2, pp. 955–973,2013.
[34] N. Alsharif, S. Cespedes, and X. S. Shen, “iCAR: intersection-based connectivity aware routing in vehicular ad hoc networks,”in Proceedings of the IEEE International Conference on Com-munications (ICC ’13), pp. 1736–1741, IEEE, Budapest, Hungary,June 2013.
[35] G. Li, L. Boukhatem, and S.Martin, “An intersection-basedQoSrouting in vehicular ad hoc networks,” Mobile Networks andApplications, vol. 20, no. 2, pp. 268–284, 2015.
[36] H. Li, “Routing protocol of sparse urban vehicular ad hocnetworks,” in Advanced Research on Electronic Commerce, WebApplication, and Communication, pp. 211–217, Spriger, 2011.
[37] X. Li, “Traffic-aware geographical routing in vehicle ad hocnetworks,” inFutureWirelessNetworks and Information Systems,pp. 755–759, Springer, 2012.
[38] K. Z. Ghafoor, J. Lloret, A. S. Sadiq, and M. A. Mohammed,“Improved geographical routing in vehicularAdHocnetworks,”Wireless Personal Communications, vol. 80, no. 2, pp. 785–804,2014.
[39] J. Mouzna, S. Uppoor, M. Boussedjra, and M. M. ManoharaPai, “Density aware routing using road hierarchy for vehicularnetworks,” in Proceedings of the IEEE/INFORMS International

International Journal of Distributed Sensor Networks 19
Conference on Service Operations, Logistics and Informatics(SOLI ’09), pp. 443–448, Chicago, Ill, USA, July 2009.
[40] N. Na Nakorn and K. Rojviboonchai, “DECA: density-awarereliable broadcasting in vehicular ad hoc networks,” in Pro-ceedings of the 7th Annual International Conference on Electri-cal Engineering/Electronics, Computer, Telecommunications andInformation Technology (ECTI-CON ’10), pp. 598–602, ChaingMai, Thailand, May 2010.
[41] H. Yu, J. Yoo, and S. Ahn, “A VANET routing based on thereal-time road vehicle density in the city environment,” inProceedings of the 5th International Conference on Ubiquitousand Future Networks (ICUFN ’13), pp. 333–337, IEEE, Da Nang,Vietnam, July 2013.
[42] Y. Sun, S. Luo, Q. Dai, and Y. Ji, “An adaptive routing protocolbased onQoS and vehicular density in urbanVANETs,” Interna-tional Journal of Distributed Sensor Networks, vol. 2015, ArticleID 631092, 13 pages, 2015.
[43] B. S. Kerner, Introduction to Modern Traffic Flow Theory andControl: The Long Road to Three-phase Traffic Theory, SpringerScience & Business Media, Berlin, Germany, 2009.
[44] J. Barrachina, P. Garrido, M. Fogue et al., “I-VDE: a novelapproach to estimate vehicular density by using vehicularnetworks,” in Ad-Hoc, Mobile, and Wireless Network: 12th Inter-national Conference, ADHOC-NOW2013,Wrocław, Poland, July8–10, 2013. Proceedings, vol. 7960 of Lecture Notes in ComputerScience, pp. 63–74, Springer, Berlin, Germany, 2013.