-
7/28/2019 DSP Lectures v2 [Chapter2][1]
1/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 1
Chapter 2
DISCRETE-TIME SIGNALS AND SYSTEMS
2.0 Introduction
This chapter introduces the different elementary discrete-time
signals that are important in thetreatment of signal processing.
These are used as basis functions or building blocks to
describemore complex signals.
This chapter also emphasizes the characterization of
discrete-time systems in general and theclass of linear
time-invariant (LTI) systems in particular.
The motivation for studying LTI systems is twofold: first, there
are a large collection of mathematical techniques that can be
applied to the analysis of LTI systems; second, manypractical
systems are either LTI systems or can be approximated by LTI
systems.
2.1 Discrete-Time Signals
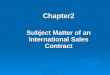
A discrete-time signal x(n) is a function of an independent
variable that is an integer. A graphicalrepresentation of a
discrete-time signal is shown below
Figure 2.1. Graphical representation of discrete-time signal
Note: A discrete-time signal is NOT DEFINED at instants between
two successive samples.
A discrete-time signal is defined for every integer value n for
- < n < + . x(n) refers to the nth sample of the signal.
-4 -3 -2 -1 0 1 2 3 4 5-1
-0.5
0
0.5
1
1.5
2
n
x ( n
)
Discrete-Time Signal
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
2/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 2
Some alternative representations of discrete-time signals:o
Functional representation through equations:
Example:
xn=1,for n=1,34,for n=20,elsewhere
o Tabular representation through tables:Example:
o Sequence representation through row matrices:Examples: For
infinite-duration signal, the time origin (n = 0) is indicated by
an below
the value.
( )
= ..0.014100...nx
A sequence, which is zero for n < 0 can be represented as
( )
= ...001410nx
If an arrow is omitted, the leftmost value is understood to be
the sample at time-origin.A finite-duration sequence is represented
as
( )
= 1405213nx
whereas a finite-duration sequence that is defined only at n
> 0 can be represented as
( ) [ ]1410nx =
2.1.1 Some Elementary Discrete-Time Signals
Unit sample sequence , denoted as (n), is defined as
n=1 for n= 00 for n 0 In words, the unit sample sequence is a
signal that is zero everywhere, except at n = 0 where itsvalue is
unity. It is also called unit impulse . The graphical
representation of (n) is shown below.
2.1.6
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
3/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 3
Figure 2.2 Unit impulse sequence
Unit step signal, denoted as u(n), is defined as
un=1 for n 00 for n < 0 Unit step signal is illustrated
below
Figure 2.3. Unit step sequence
-10 -5 0 5 100
0.5
1
1.5
2
-10 -5 0 5 100
0.5
1
1.5
2
2.1.7
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
4/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 4
Unit ramp signal , denoted as r(n), and is defined as
rn=n for n 00 for n < 0 Unit ramp sequence is shown below
Figure 2.4. Unit ramp sequence
Exponential signals are of the form
xn=a
If a is a real number, then x(n) is also a real number. The
figures below illustrate x(n) for variousvalues of the parameter
a.
Figure 2.5. Real exponential signals for various values of the
parameter a
-10 -5 0 5 100
5
10
15
2.1.8
2.1.9
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
5/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 5
When the parameter a is complex-valued, it can be expressed
as
a= re and x(n) as
xn=re= re= rcosn+ jsin having a real part x R(n)xRn= rcosn
and imaginary part x I(n)
xIn=rsinn Figure below shows the real and imaginary plots of the
complex exponential signal. Notice that
the real part is a damped cosine wave while the imaginary part
is a damped sine wave.
Figure 2.6. Graphs of real and imaginary components of a
complex-valued signal
Complex exponential signals can also be represented graphically
using the amplitude function
|xn |=An=r
and the phase function
xn= n= n The figure below shows the plot of complex exponential
function in terms of magnitude andphase functions.
0 5 10 15 20 25 30-0.5
0
0.5
1real part
0 5 10 15 20 25 30-0.5
0
0.5
1imaginary part
2.1.10
2.1.11
2.1.12
2.1.13
2.1.14
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
6/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 6
Figure 2.7. Graph of amplitude and phase function of a
complex-valued exponential signal
2.1.2 Classification of Discrete-Time Signals
Energy and power signalso The energy E of a signal x(n) is given
as
E=|xn |
o If the energy of the signal E is finite, then it is an energy
signal .o If its energy is infinite, it may have finite average
power, given by
P= limN 12 +1 |xn |N N o If it has finite average power, then it
is a power signal .
Periodic and aperiodic signalso A signal x(n) is periodic with
period N (N > 0) if and only if
xn+=xnfor all no If there is no value of N that satisfies the
above equation, the signal is considered
aperiodic .
0 5 10 15 20 25 300
0.5
1magnitude
0 5 10 15 20 25 30-5
0
5phase
2.1.15
2.1.16
2.1.20
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
7/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 7
o The energy of a periodic signal x(n) over a single period is
finite, if x(n) takes on finitevalues over the period. However, for
the whole duration of the signal (from negative topositive
infinity) its energy is infinite.
o For the whole duration of the signal, the average power of the
periodic signal is finiteand is equal to the average power over a
single period, given by
P=1 |xn |N hence, a periodic signal is a power signal.
Example: Determine whether the following signals are energy or
power signals and determinetheir energy and power.
a) Unit sample sequenceb) Unit step sequence
c)
xn=cos, for
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
8/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 8
o The even signal component is formed by
xn=12xn+ xn o The odd signal component is formed by
xn=12xn xn Example: Resolve the following signals into its odd
and even components and plot the resulting
sequence. Verify your answers.a) Unit step sequence
b) xn=1+for 3 n 11 for 0 n 30 elsewhere
c) ( ) = LL 2341123nx
2.1.3 Simple Manipulations of Discrete-Time Signals
Transformation of the independent variable (time) o Time
shifting shifting the signal x(n) in time involves replacing n with
n k, where k is
an integer. If k is positive , the time shifts results in the
delay of the signal by k units of time. If k is negative , the time
shifts results in an advance of the signal by |k| units of
time.
2.1.26
2.1.27
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
9/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 9
Figure 2.9. Graphical representation of a signal, and its
delayed and advanced versions
o Time folding the signal x(n) is folded about n = 0 when the
time variable n is replacedby n.
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
10/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 10
Figure 2.10. Graphical illustration of the folding and shifting
operations
o Time-scaling the signal x(n) is downsampled when the time
variable n is replaced byan, where a is an integer. It is upsampled
when the time variable n is replaced by n/a,where a is an
integer.
o Downsampling means resampling the sampled signals, that is,
decreasing the samplingrate by a. Upsampling means inserting a 1
samples in between samples.
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
11/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 11
Figure 2.11. Downsampling and Upsampling
Addition, multiplication and scaling of sequences o Amplitude
scaling of a signal by a constant A is accomplished by multiplying
the value of
every signal sample by A.
yn=Axnfor - < n < +
o The sum of two signals x 1(n) and x 2(n) is a signal y(n),
whose value at any instant is equalto the sum of the values of
these two signals at that instant, that is
yn=xn+ xnfor - < n < + o The product of two signals is
similarly defined on a sample-to-sample basis as
yn=xn xnfor - < n < + Example: A discrete-time signal is
defined as
xn=1+n3for 3 n 11 for 0 n 30 elsewhere
a. Determine its values and sketch the signal x(n).b. Sketch the
signal that will result if we:
i. First fold x(n) and then delay the resulting signals by four
samples.ii. First delay x(n) by four samples and then fold the
resulting signal.
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
12/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 12
c. Sketch the signal x(-n + 4).d. Compare the results in parts
(b) and (c) and derive a rule for obtaining the signal x(-n+k)
from x(n).e. Express the signal x(n) in terms of signal of unit
sample and unit step sequences.
Example: A discrete-time signal x(n) is shown below. Sketch and
label carefully each of thefollowing signals:
a) x(n 2)b) x(4 n)c) 3x(n + 2)d) x(n) u(2 n)e) x(n 1) (n 3)f)
x(n2)g) even part of x(n)h) odd part of x(n)
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
13/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 13
2.2 Discrete-Time Systems
A discrete-time system is a device or an algorithm that performs
some prescribed operation ona discrete-time signal.
The discrete-time system performs operation on an input
discrete-time signal according to some
well-defined rule (the algorithm ) to produce the output or
response . We can describe the operation applied by the system to
the input signal x(n) to produce the
output y(n) in the following manner
yn= xn where T denotes transformation (also called an operator)
or processing performed by thesystem on x(n) to produce y(n).
2.2.1 Input Output Description of Systems
The input output description of a discrete-time system consists
of a mathematical expressionor a rule, which explicitly defines the
relation between the input and output signals
Figure 2.12. Block diagram representation of a discrete-time
system.
Example: For the input signal
xn=|n|, 3 30, Determine the output of the system defined by the
following input output relationship.
a)
yn=xn
b) yn=xn1 c) yn=xn+1 d) yn=xn+1+ xn+ xn1 e) yn=maxxn+1,xn,xn1 f)
yn=xn=xn+ xn1+ xn2+
2.2.1
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
14/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 14
2.2.2 Block Diagram Representation of Discrete-Time Systems
An adder a system that performs the addition of two signals
sequences to form anothersequence, which is the sum of the two
inputs. The symbol for an adder is illustrated below
Figure 2.13. Symbol for adder
A constant multiplier a system that multiplies the input signal
by a scale factor. The symbol forthe constant multiplier is shown
below.
Figure 2.14. Symbol for constant multiplier
Signal multiplier a system that multiplies two input sequences
to produce the productsequence. A graphical representation of the
signal multiplier appears below.
Figure 2.15. Symbol for signal multiplier
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
15/32
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
16/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 16
o If the output of the system at any instant is computed using
the past or future sample of the input and the past output, the
system is said to be dynamic or to have memory . Thesystems
described by the following input-output relations
yn=xn+ 3xn1
yn=xnk yn=xnk
are dynamic systems or systems with memory.
Time-invariant versus time-variant systems o A system is
time-invariant if its input-output characteristics do not change
with time. If
a system T in a relaxed state is excited by the input x(n) to
produce the output y(n), thenwe have
yn=Txn If we excite the system by an input delayed by k number
of samples, the outputbecomes
yn,k=Txnk The system is said to be time-invariant if y(n,k) =
y(n k); otherwise it is said to be timevarying.
o The system identified by the input-output equation
yn=xn xn1 is time-invariant while the system
yn=nxn is time-varying system.
Example: Determine if the following systems are time-invariant
or time-varying systemsa) yn=xn xn1 b) yn=nxn c) yn=xn d)
yn=xncosn
2.2.13
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
17/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 17
Linear versus nonlinear systems o A linear system is one that
satisfies the superposition principle .o The superposition
principle requires that the response of the system to a weighted
sum
of signals be equal to the corresponding weighted sum of the
responses of the systemto each of the individual input signals.
o A relaxed system T is linear if and only if
Taxn+ axn= aTxn+ aTxn for any arbitrary input sequences x 1(n)
and x 2(n) and any arbitrary constants a 1 and a 2.
Figure 2.20. Graphical representation of the superposition
principle
o Linear systems exhibit multiplicative or scaling property and
additive property . This isthe consequence of the definition of the
superposition principle (Eq. 2.2.26)
o The linearity condition stated by Eq. 2.2.26 can also be
extended to any weighted linearcombination of signals.
Example: Determine if the following systems described by the
following input-output equationsare linear or nonlinear.
a) yn=nxn b) yn=xn c) yn= xn d) yn=Axn+ B e) yn=e
2.2.26
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
18/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 18
Causal versus noncausal systems o A system is said to be causal
if the output of the system at any time [i.e., y(n)] depends
only on present and past inputs [i.e., x(n), x(n 1), x(n 2), ],
but does not depend onfuture inputs [i.e., x(n + 1), x(n + 2),
].
o If a system does not satisfy this condition, then it is said
to be noncausal .o Noncausal systems are physically unrealizable in
real-time signal processing
applications. Example: Determine if the systems described by the
following input-output equations are causal
or noncausalo yn=xn xn1 o yn=xk o yn=axn o yn=xn+ 3xn+4 o yn=xn
o yn=x2n
o
yn=xn
Stable versus unstable systems o Stability is an important
property that must be considered in any practical application
of
a systemo An arbitrary relaxed system is said to be bounded
input bounded output (BIBO)
stable if and only if every bounded (finite) input produces a
bounded output.o If, for some bounded input sequence x(n), the
output is unbounded (infinite), the
system is classified as unstable . Example: Analyze the
stability of the nonlinear system described by the input-output
equation
yn=yn1+ xn
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
19/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 19
2.3 Analysis of Discrete-Time Linear Time-Invariant Systems
We now turn our attention to the analysis of the important class
of linear, time-invariant (LTI)systems.
In particular, we shall demonstrate that such systems are
characterized in the time domain
simply by their response to a unit sample sequence. We shall
also demonstrate that any arbitrary input signal can be decomposed
and represented
as a weighted sum of unit sample sequences. The general form of
the expression that relates the unit sample response of the system
and the
arbitrary input signal to the output signal, called the
convolution sum or convolution formula , isalso derived.
2.3.1 Techniques for the Analysis of Linear Systems
Two basic methods for analyzing the behavior or response of a
linear system to a given inputsignal.
o Direct solution of the input-output relationship of the
system, whose general form (forthe LTI discrete-time systems)
is
yn= aynkN +bxnkM called the difference equation and represents
one way to characterize the behavior of adiscrete-time LTI
systems.
o The second method of analyzing the behavior of a linear system
to a given input signal is
first decompose or resolve the input signal into a sum of
elementary signals. Theelementary signals are selected so that the
response of the system to each signalcomponent is easily
determined. Then, using the linearity property of the system,
theresponses of the system to the elementary signals are added to
obtain the totalresponse of the system to the given input
signal.
o The first method is discussed in the next section, the second
method is discussed in thissection.
The choice of the elementary signals appears to be arbitrary, as
long as the response can bedetermined conveniently.
Resolution of the input signal to a weighted sum of unit sample
(impulse) sequence proves to bemathematically convenient and
completely general solution to the response of the system. Butif
the input signal is periodic with period N, it can be more
mathematically convenient for us toresolve these signals into
harmonically related exponentials
xn= e k= 0, 1, 2. . . N-1
2.3.1
2.3.5
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
20/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 20
where the frequencies k are harmonically related and equal to
2k/N.
2.3.2 Resolution of Discrete-Time Signals into Impulses
Suppose we have an arbitrary signal x(n) that we wish to resolve
into a sum of unit sample
sequence. We select the elementary signals x k(n) to be
xn= nk Note that the signal (n k) is zero everywhere except at n
= k, where its value is unity.
If we multiply the input signal x(n) with (n k), the result of
this multiplication is anothersequence that is zero everywhere
except at n = k, where its value is x(k). Thus if we repeat
thisprocess at all possible values of k, the equation below holds
true:
xn= xknk
2.3.7
2.3.10
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
21/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 21
Example: Resolve the sequence ( )
= 3042nx
into a sum of weighted impulse
sequence.
2.3.3 Response of LTI Systems to Arbitrary Inputs: The
Convolution Sum
We denote the response of the system to the input unit sample
sequence as h(n) and is calledthe impulse response of the system. A
relaxed LTI discrete-time system is characterized, in time-domain,
by its impulse response.
The response of the LTI system as a function of the input signal
x(n) and its impulse responseh(n) is given as
yn= xnhnk and is called the convolution sum of x(n) and
h(n).
The convolution sum involves four steps.o Folding Fold h(k)
about k = 0 to obtain h(-k).o Shifting Shift h(-k) by n 0 to the
right (or left) if n 0 is positive (or negative) to obtain h(n
0
k).o Multiplication Multiply x(k) by h(n 0 k) to obtain the
product sequence x(k)h(n 0 k).o Summation Sum all the values of the
product sequence to obtain the value of the
output at time n = n 0. We note that this procedure results in
the response of the system at a single time instant n = n 0.
To evaluate the response of the system over all time instants,
we should repeat steps 2 to 4accordingly.
We also note that the convolution sum is commutative, that is,
it can be also expressed in theform
yn= xnkhn Example: The impulse response of a linear,
time-invariant system is
( ) = 1121nh
Determine the response of the system to the input signal
( )= 1321nx
2.3.17
2.3.28
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
22/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 22
Example: Determine the output y(n) of a relaxed linear
time-invariant system with impulseresponse
hn= aun,|a|
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
23/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 23
The distributive property of the convolution sum is described as
follows:
xnhn+ hn=xn hn+ xn hn
2.3.5 Causal Linear Time-Invariant Systems
A causal system is one whose output at time n depends only on
present and past inputs butdoes not depend on future inputs. For
LTI systems, the causality condition also puts a restrictionon the
impulse response of the system.
A causal system has a causal impulse response, that is h(n) = 0
for n < 0. It is a necessary andsufficient condition for
causality.
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
24/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 24
The convolution sum formula can now be modified to reflect this
condition. Thus
If the input signal x(n) is also causal, that is x(n) = 0 for n
< 0, the above formula can be furthersimplified, that is
2.3.6 Stability of Linear Time-Invariant Systems
An arbitrary relaxed system is BIBO stable if and only if its
output sequence y(n) is bounded forevery bounded x(n).
In terms of its impulse response h(n), an LTI system is stable
if and only if its impulse response isabsolutely summable, that is,
it decays over time, or
This implies that any excitation at the input of the system,
which is of finite duration, producesan output that is transient in
nature, that is its amplitude decays with time and dies
outeventually, when the system is stable.
Example: Determine the range of values of the parameter a for
which the LTI system withimpulse response
h(n) = a n u(n)
is stable.
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
25/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 25
Example: Determine the range of values of a and b for which the
LTI system whose impulseresponse
hn=a, n0b, n
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
26/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 26
2.4 Discrete-Time Systems Described by Difference Equations
We have treated linear and time-invariant systems that are
characterized by their unit sampleresponse h(n). In turn, h(n)
allows us to determine the output y(n) of the system for any
giveninput sequence x(n) by means of convolution summation
yn= hkxnk This convolution formula in Eq. 2.4.1 suggests a means
for the realization of the system. In caseof FIR systems, such a
realization involves additions, multiplications and a finite number
of memory locations. Thus, FIR systems are readily implemented
directly by convolutionsummation.
If the system is IIR, however it is impractical to implement it
through the convolutionsummation, since it requires an infinite
number of memory locations, multiplications, andadditions.
Thus IIR systems are more practically realized through the
difference equation, which givescomputationally more efficient way
of implementing IIR systems. This section describes themethod of
analyzing systems using the difference equation.
2.4.1 Recursive and Nonrecursive Discrete-Time Systems
Recursive systems is a system whose output y(n) at time n
depends on any number of pastoutput values y(n-1), y(n-2), . . .
etc. If the output y(n) does not depend on the previous outputs,the
system is called nonrecursive .
Recursive algorithm oftentimes provide more computationally
efficient means of implementingalgorithms.
Example: Analyze the system which computes the cumulative
average of a signal x(n) in theinterval 0 k n.
yn=1n+1 xk Example: Analyze the system which computes the
square-root of a number A.
yn=12yn1+xn
yn1
for the input x(n) = 2u(n). Use 2as an initial condition. The
difference between recursive and nonrecursive systems is
illustrated in the diagram below.Note the presence of the feedback
loop and the delay element for recursive system.
2.4.1
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
27/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 27
2.4.2 Linear Time-Invariant Systems Characterized by
Constant-Coefficient Difference Equation
Systems described by constant-coefficient linear difference
equations are a subclass of therecursive and nonrecursive systems
introduced in the preceeding subsections.
Example: Analyze the simple recursive system
yn=ayn1+ xn
The first part of the response, which contains y(-1) is the
result of the initial condition y(-1) of the system. The second
part of the response is the response of the system to the input
signalx(n).
If the system is initially relaxed, i.e. y(-1) = 0, its
corresponding output is called its zero-stateresponse or forced
response. It is denoted by y zs(n).
If the initial conditions of the system is nonzero, and the
input x(n) is zero for all values of n, thesystem still has output,
and is called the zero-input response or natural response . It is
denotedby y zi(n).
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
28/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 28
In general, systems are described by linear,
constant-coefficient difference equations. Thegeneral form for such
an equation is
yn= aynkN +bxnkM The integer N is called the order of the
difference equation or the order of the system. Observe that in
order to get y(n), we need to know the present and the past inputs
x(n) as well
as the previous outputs y(n-k).
2.4.3 Solutions of Linear Constant-Coefficient Difference
Equation
Given a linear, constant-coefficient difference equation as the
input-output relationshipdescribing a linear, time-invariant
system, our objective in this subsection is to determine anexplicit
expression for the output y(n).
The method that we will develop in this section is called the
direct method . The indirectmethod of solving these types of
equations involves the use of z-transform .
The direct solution method assumes that the total solution is
the sum of two parts:
yn= yn+ yn The part y h(n) is called the homogenous or
complementary solution , whereas y p(n) is called theparticular
solution .
The homogenous solution o Assume that x(n) = 0. Thus we will
obtain the solution for the homogenous difference
equation
aynkN =0 o Assume that the solution is of the form of an
exponential
yn= m o Substitute this to Eq. 2.4.14 to form the polynomial
equation
amN
=0
or
m NmN+ amN+ + aNm+aN=0 The polynomial in parentheses is called
the characteristic polynomial of the system. Ingeneral, it has N
roots, which we denote as m 1, m 2, m 3, , mN. The roots can be
real or
2.4.14
2.4.15
2.4.16
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
29/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 29
complex-valued. Since the coefficients a 1, a 2, , aN are real,
complex valued roots occurare complex-conjugate pair. Some of the N
roots may be identical, in which case wehave multiple order
roots.
o If the roots are distinct, the most general solution to the
homogenous difference
equation in Eq. 2.4.14 is
yn=cm+cm+ cm+ + cNmN where c 1, c2, c3, cN are the weighing
coefficients.
o These coefficients are determined from the initial conditions
specified for the system.o Since the input x(n) = 0, Eq. 2.4.17 can
be used to obtain the zero-input response of the
system. Example: Determine the homogenous solution of the system
described by the first order
difference equation
yn=ayn1+ xn
Example: Determine the zero-input response of the system
described by the homogenoussecond-order difference equation
yn 3yn14yn2=0 Example: Determine the homogenous solution and the
zero-input response of the system
described by the difference equation
yn=yn1 yn2+ xn
Example: Determine the homogenous solution and the zero-input
response of the systemdescribed by the difference equation
yn 3yn14yn2=xn+ 2xn1
2.4.17
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
30/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 30
The particular solution o Assume a particular solution y p(n)
that depends on the input
o Substitute this particular solution to the original function.o
Solve for the necessary values of K that satisfies the original
function for values of n
where none of the terms vanish. Example: Determine the
particular solution of the system described by the first order
difference
equation yn=ayn1+ xn at the input x(n) = u(n). Example:
Determine the particular solution of the difference equation
yn=yn1 yn2+ xn to the input (a) x(n) = 4u(n) and (b) x(n) = 2
nu(n).
Example: Determine the particular solution of the difference
equation
yn 3yn14yn2=xn+ 2xn1 to the input x(n) = 4
n
u(n).
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
31/32
Signals, Spectra and Signal Processing (EC413L1)
Chapter 2 Discrete-Time Signals and Systems Page 31
The total solution o The linearity property of the linear
constant-coefficient difference equation allows us to
add the homogenous solution and the particular solution in order
to obtain the totalsolution. Thus
yn= yn+ yn
o The resultant y(n) contains the constant parameters embodied
in the homogenoussolution. These constants can be determined to
satisfy the initial conditions.
Example: Determine the total solution y(n), n 0, to the
difference equationyn=ayn1+ xn when x(n) is a unit step sequence
and y(-1) is the initial condition. Example: Determine the total
solution of the system
yn=yn1 yn2+ xn to the input (a) x(n) = 4u(n) and (b) x(n) = 2
nu(n). The initial conditions of this system are y(-1) =y(-2) = 1.
Also determine the zero-state and zero-input response of this
system.
Example: Determine the total solution of the system
yn 3yn14yn2=xn+ 2xn1 to the input x(n) = 4 nu(n). Also determine
the zero-state and zero-input response of this system.
2.4.4 The Impulse Response of a Linear Time-Invariant Recursive
System
The impulse response of the system h(n) was previously defined
as the response of the systemto a unit sample excitation.
In the case of a recursive system, h(n) is simply equal to the
zero-state response of the systemwhen the input x(n) = (n) and the
system is initially relaxed.
Example: Determine the impulse response of the systemyn=ayn1+ xn
We have established the fact that the total response of the system
to any excitation function
consists of the sum of the two solutions of the difference
equation: the homogenous and theparticular solution to the
excitation function.
In the case where the excitation is an impulse, the particular
solution is zero, since x(n) = 0 for n> 0.
The response of the system to an impulse consists only of the
solution to the homogenousequation, with the constant parameters
evaluated to satisfy the initial conditions dictated by
theimpulse.
-
7/28/2019 DSP Lectures v2 [Chapter2][1]
32/32
Signals, Spectra and Signal Processing (EC413L1)
Example: Determine the impulse response h(n) for the system
described by the second orderdifference equation yn 3yn14yn2=xn+
2xn1
We note that any recursive system described by a linear,
constant-coefficient differenceequation is an IIR system.
Reference:
John G. Proakis, Dimitris G. Manolakis. Digital Signal
Processing: Principles, Algorithms, andApplications: Third Edition.
Prentice Hall, New Jersey. 1996