Embed Size (px)
Citation preview

ĐÊ TÀI TIỂU LUẬN: Tìm hiểu giao tiếp 89C51 với động cơ bước và ứng dụng điều khiển góc quay, chiều quay của động cơ theo nút ấn. PHẦN I; Tìm hiểu về 89C51

1.1Sơ đồ chân và chức năng các chân của chip 8051

SƠ ĐỒ KHỐI CỦA CHIP 8051

SƠ ĐỒ CHÂN CỦA CHIP 8051
SƠ ĐỒ CHÂN CỦA CHIP 8051


1 Port 0; port0 (P0.0-P0.7)có số chân từ 32-39.Port 0 có 2 chức năng:Port xúât nhập dữ liệu(P0.0-P0.7) →không sử dụng bộ nhớ ngoài và bus địa chỉ byte thấp và bus dữ liệu đa hợp(AD0-AD7) → có sử dụng bộ nhớ ngoài.Port0 đóng vai trò xuất nhập dữ liệu thì phải sử dụng các điện trở kéo bên ngoài 2 Port1:Port1(P.0-P.7) có số chân từ1 -8.Port có chức năng xuất nhập dữ liệu (P1.0-P1.7) →sử dụng hoặc không sử dụng bộ nhớ ngoài 3 Port 2: Port(P2.0-P2.7) có số chân từ 21-28.Port có 2 chức năng :port xuất nhập dữ liệu(p2.0-P2.7) không sử dụng bộ nhớ ngoài và bus địa chỉ cao(A8-A5) có sử dụng bộ nhớ ngoài
4 Port 3:Port 3( P3.0-P3.7) có số chân từ 10-17.Port 3 có 2 chức năng;port xuất nhập dữ liêu ( P3.0-P3.7) → không sử dụng bộ nhớ ngoái hoặc các chức năng đặc biệt, các tín hiệu điều khiển→ có sử dụng bộ nhớ ngoài hoặc các chức năng đặc biệt

Chức năng của các chân port3 Bit &am p;am p;nb sp; Tên &am p;am p;nb sp; Địa chỉ bit &am p;am p;nb sp; Chức năngP3.0 &a mp;a mp;n bsp; RxD &am p;am p;nb sp; BOH &am p;am p;nb sp; &am p;am p;nb sp; Chân nhận dữ liệu của port nối tiếpP3.1 &a mp;a mp;n bsp; TxD ; ; ; B1H &am p;am p;nb sp; &am p;am p;nb sp; Chân phát dữ liệu của port nối tiếpP3.2 &a mp;a mp;n bsp; INTO\ & amp; amp; nbsp; B2H &am p;am p;nb sp; &am p;am p;nb sp; Ngõ vào ngăt ngoài 0P3.3 &a mp;a mp;n bsp; INT1\ & amp; amp; nbsp; B3H &am p;am p;nb sp; &am p;am p;nb sp; Ngõ vào ngắt ngoài 1
P3.4 &a mp;a mp;n bsp; T0 & ; ;nbs p; B4H &am p;am p;nb sp; &am p;am p;nb sp; Ngõ vào của bộ định thời/đếm 0P3.5 &a mp;a mp;n bsp; T1 & ; ;nbs p; B5H &am p;am p;nb sp; &am p;am p;nb sp; Ngõ vào của bộ định thời/đếm 1P3.6 &a mp;a mp;n bsp; WR\ &am p;am p;nb sp; B6H &am p;am p;nb sp; &am p;am p;nb sp; Điều khiển ghi vào RM ngoài P3.7 &a mp;a mp;n bsp; RD\ ; ; ; B7H &am p;am p;nb sp; &am p;am p;nb sp; Điều khiển đọc vào RM ngoài
5 Chân PSEN\:- PSEN cho phép bộ nhớ chương trình, chân số 29Chức năng• Là tín hiệu cho phép truy suất (đọc) bộ nhớ chương trình (ROM) ngoài• Là tín hiêu xuát tích cực ở mức thấp PSEN\=0 → trong thời gian CPU tìm- nạp lệnh từ ROM ngoài PSEN\=1 →CPU sử dụng ROM trong6 chân ALE ALE cho phép chốt địa chỉ, chân số 30Chức năng• Là tín hiệu cho phép chốt địa chỉ để thực hiện việc giải đa hợp cho bus địa chỉ byte thấp và byte dữ liệu đa hợp (AD0-AD7)• Là tín hiệu xuất tích cực mức caoALE=0 trong thời gian bus AD0-AD7 đóng vai trò bus D0-D7 ALE = 1 trong thời gian bus AD0-AD7 đóng vai trò bus A0-A7 7 chân EA truy xuất ngoài• Là tín hiệu cho phép truy xuất (sử dụng) bộ nhớ chương trình ROM ngoài• Là tín hiệu nhập tích cưc ở mưc thấp.EA\=0 chip 8051 sử dung chương trình ROM ngoàiEA\=1 chip 8051 sử dung chương trình ROM trong8 chân XTAL1, XTAL2 tinh thể thạch anh chân số 18-19• Dùng để nối thạch anh với mạch dao động tạo xung clock bên ngoài cung cấp xung clock cho chip hoạt động• XTAL1 ngõ vào mạch tạo xung clock trong chip

• XTAL2 ngõ ra mạch tạo xung clock trong chip f =12MHz f tần số danh định
9 chân RST:thiết lập lại chân số 9• Là tín hiệu cho phép thiết laaaawpj lại trạng thái ban đầu cho hệ thống • Là tín hiệu nhập tích cực mức cao
RST=0 chip 8051 hoạt động bình thường RTS=1 chip 8051 được thiết lập lại trạng thái ban đầu
10 chân Vcc,GND nguồn cấp điện chân số 40-20• Cung cấp nguồn điện cho chip 8051 hoạt động • Vcc=+5V±10% và GND=0V
PHẦN 2 :tìm hiểu khối đệm dữ liệu
Sơ đồ mạch giao tiêp giữa 89c51 với đông cơ bước có sử dung ic đệm làULN2803Trong trường hợp các port xuất nhập của vi điều khiển cần phải điều khiển những thiết bị công suất lớn hoăc cùng lúc phải điều khiển nhiều thiêt bị trên 1 port.Lúc này cần đòi hỏi có các bộ khuếch đại dòng điện ngõ ra tại các port xuất nhập của vi điều khiển thì nó mới có thể đáp ứng được công việc điều khiển nêu trên.Trên mạch điều khiển động cơ bước thiết kế sẵn bộ đếm dữ liệu có chức năng khuyếch đại các dòng điện tại ngõ vào của chúng.Dòng điện tại ngõ ra khoảng 300-

500mA.Bộ đệm ULN2803 sử dụng ở đây là bộ đệm có đảo . Khối đem đảo này ta phải cấp nguồn cho chúng.Ứng dụng• Được sử dụng để thực hiện việc kết nối giữa các thiết bị ngoại vi công suốt cao với chip điều khiển • Khuếch đại dòng điện điều khiển cung cấp cho các thiết bị công suất cao.
PHẦN 3 : tìm hiểu về động cơ bước &a mp;a mp;n bsp; 1,Khái quát về động cơ buớc: Giới thiệu về động cơ bước và các phương pháp điều khiển động cơ bướcTrong hệ thống tự động và trong máy tính điện tử ngày càng sử dụng rộng rải hệ thống truyền động rời rạc. Các hệ thống truyền động rời rạc này thực hiện nhờ loại động cơ chấp hành đặc biệt gọi là động cơ bước. Động cơ bước thường là động cơ đồng bộ dùng để phổ biến các tín hiệu điều khiển dươí dạng các xung điện áp thành các chuyển động góc quay hoặc chuyển động của rotor và có khả năng cố định rotor vào những vị trí cấn thiết. Động cơ bước làm việc được nhờ có bộ chuyển mạch điện tử, để đưa tín hiệu điều khiển vào các cuộn dây stator, theo một thứ tự và một tần số nhất định. Tổng số góc quay của rotor tương ứng với số lần chuyển mạch, cũng như chiều quay và tốc độ quay của rotor, phụ thuộc vào thứ tự chuyển và tần số chuyển đổi.Động cơ bước được chia thành hai loại, động cơ bước nam châm vĩnh cửu và động cơ bước từ trở thay đổi(cũng có loại động cơ phối hợp cả hai loại trên) cách chia cũng phụ thuộc quan điểm người sử dụng. Nếu đánh mất nhãn trên động cơ ta có thể tổng quát nêu lên được hai khác biệt bởi cảm nhận được qua giác quan. Động cơ nam châm vĩnh cửu có xu hướng “khớp “khi ta dùng tay xoay rotor trong khi động cơ từ trở thay đổi hầu như quay tự nhiên, ta cũng có thể phân biệt được sự khác nhau khi dùng một Ohm-Metter, động cơ từ trở thay đổi thường có ba hay bốn cuộn dây với một đầu chung trong khi động cơ nam châm vĩnh cửu luôn có hai cuộn dây độc lập có hay không có đầu nối ở tâm (loại nam châm vĩnh cửu đơn cực thường dùng). Động cơ bước có tầm rộng của độ phân giải góc, bước lớn nhất khoảng 90 độ trên mỗi bước. Đối với động cơ nam châm vĩnh cửu có độ phân giải cao thường có thể điều khiển được 1.8 hay ngay cả 0.72 độ cho mỗi bước. Với bộ điều khiển thích hợp, động cơ nam châm vĩnh cửu và hổn hợp có thể hoạt động ở chế độ Hafl-Step, một số bộ điều khiển có thể điều khiển ở các bước rất nhỏ gọi là micro-step.

Cho cả động cơ nam châm vĩnh cửu lẫn từ trở thay đổi nếu cấp điện cho cuộn dây rotor sẽ chuyển động nhanh tới một góc cố định và giữ góc đó đến khi moment quay vượt quá moment giữ của động cơ ở lúc này rotor sẽ quay và cố giữ cho đến điểm kế tiếp. Xét về cấu tạo,động cơ bước có 3 loại chính: -Động cơ bước có nam châm vĩnh cửu -Động cơ bước có từ trở thay đổi -Động cơ bước kiểu hỗn hợpBa chế độ điều khiển động cơ bước1 Biểu thức toán học tổng hợp -điều khiển cả bước -điều khiển nửa bước -điều khỉên vi bước 2 Các đặc trưng của tín hiệu điều khiển động cơ bướcĐối với động cơ bước,tín hiệu điều khiển là các xung rời rạc kế tiếp nhau.Việc điều khiển động cơ phụ thuộc vào các tham số sauDòng điện I kể cả cực tính ( và liên hệ mật thiết với nó là mức điện áp U)Độ rộng xung(liên quan đến tốc độ quay)Tần số xung(liên quan đến tốc độ quay)Cách thức cấp xung bao gồm thứ tự và số lượng cuộn dây pha được cấp (liên quan đến chiều quay và mômen tải)Tùy thuôc vào việc cấp xung điện động cơ bước có bốn trạng thái sau đâya, trạng thái không hoạt động:khi không cuộn dây nào được cấp điện -đối với cơ phản kháng:rôt sẽ quay trơn -đối với động cơ nam cham vĩnh cửu động cơ kiểu hỗn hợp:có mômen hãm roto có xu huơngs dừng ở các vị trí mà đường khép từ thông giữa các cực của roto và stato nhỏ nhấtb, trạng thái giữ :khi 1 cuộn dây pha được cấp điện 1 chiều.Roto mang tải sẽ được giữ chặt ở vị trí góc bước nhất định do lực điện từ tổng F sinh ra mômen giữc, trạng thái dịch chuyển bước:roto sẽ dịch chuyển từ từ vị trí bước đang được bước sang vị trí bước tiếp theo khi các cuộn dây pha được cấp dòng phù hợpd,trạng thái quá giới hạn:trong chế độ không tải nếu xung điều khiển có tần số quá cao,động cơ sẽ quay vượt tốc.ở trạng thái này động cơ không thể dảo chiều , không thể dừng đúng vị trí , nhưng vẫn tân và giảm tốc từ từ.Bốn kiểu điều khiển dòng điện I và điện áp U 1. Điều khiển dòng –áp bằng hệ số L/RĐây là cách đơn giản nhất, chỉ áp dung cho động cơ có công suất rất nhỏ ( VD điều khiển đọc ổ đĩa, chỉnh tiêu cợ ống kính…..). Bản chất điều khiển này là khi ở trang thái giữ thì nguồn chịu tải chính là Rs,khi dịch bước thì nguồn chịu tải chính là cảm kháng Zl Muốn cho động cơ quay tốc độ cao thì phải chon Vcc lớn,trên thực tế là bằng7->15 lần điện áp danh định U.Do đó khi ở chế độ giữ công suất tiêu tán trên điện trở nối tiếp Rs rất lớnP= I Rs= Công suất tổn hao này mọt lãn phí,có thể làm nóng và cháy Rs2. Điều khiển dòng áp bằng độ rộng xung-Ỏ chế độ dịch bước cuộn dây pha được cấp 1 xung có độ rộng sao cho roto có thể dịch được 1 bước, nghĩa là dòng I đạt đến mức Io≤i≤Imax-Sau khi dịch bước, ở chế độ giữ,ta không cấp dòng 1 chiều mà cấp xung cao và điện áp cao hơn.Lúc này điện cảm L của cuộn dây pha có tác dụng như 1 bộ lọc tích phân và dòn điện trung bình làm nhiệm vụ sinh ra mômen giữ.

-Nhưng kiểu này còn có những nhược điểm sau:mạch điều khiển phức tạp và đòi hỏi tránitor làm nhiệm vụ khóa điện tử phải có chế độ đóng cứt nhanh, công suất lớn.Trong thời gian giữ từ trường thay đổi liên tục làm nóng động cơ.tránitor phai chịu các xung điện áp thuận nghich khá cao nên mức độ nào đó cũng bị nóng.Các xung điện áp cao và tần số cao cùng vứi từ trường thay đổi liên tục gây nhiễu radio và nhiễu điện từ trường nhiều khi làm cho mạch điều khiển không hoạt động được và Không áp dụng cho chế độ vi bước.3. điều khiển dòng-áp bằng điện áp hai mức,-khi ở chế độ giữ ta cấp cho cuộn dây pha 1 điện áp thấp,đúng bằng điên áp danh định U và do đó dòng điên cũng đạt mức danh định nhưng không có công suất tiêu tán trên nguồn-khi ở chế độ dich bước, đông thời với việc xung điều khiển, ta cấp cho cuộn dây pha thêm 1 điện áp Vcc rất cao và đo dòng điện trong cuộn dây.Khi dòng không đạt đếngias trị vừa đủ để động cơ quay 1 bước ta ngắt điện áp cao và đưa điện áp thấp vào.4 . Điều khiển nguồn dòng- áp bằng nguồn dòng.Nguồn dòng là bộ nguồn luôn xuất ra 1 giá trị dòng điện không đổi Iconst.Điện áp của nó chính là điên áp Ut rơi trên tải Rt Ut = Iconst.RtMột nguồn dòng lí tưởng phải có Ut tiến đến vô cùng.Nhưng thực tế điện áp ra của nguồn dòng luân có giới hạn Umax và do đó điện trở tải cũng phải có gia trị cực đại Rmax để thỏa mãn I . R ≤ U Nếu Rt>Rmax thì dòng ra I < Iconst điều này giải thích tại sao ngay cả khi được cấp bằng nguồn dòng,roto của động cơ bước cũng không thể quay tức thì. Điều khiển tốc độ quay của động cơ bướcĐộng cơ bước có thể quay với bất kì tốc độ nào trông giải từ 0 vòng/phút đến giá trị cực đại cho phép.Do tính chất đặc biệt, động cơ bước có thể dừng đột ngột ở bất kỳ vị trí nào trong độ phân giải của góc bước khi đang quay với bất kỳ tốc độ nào trong giải cho phép . Vì vậy động cơ bước ít khi được dùng cho các thiết bị cần quay với tốc độ đều (trong trường hợp này ta sử dụng các loại động cơ khác đơn giản hơn) mà nó đươcj sử dụng chủ yếu để điều khiển thích nghi, nghĩa là tốc độ quay biến đổi liên tục, thậm chí động cơ phải dừng và đứng yên ở vị trí bám sát.Với lẽ đó, vận tốc quay của động cơ bước thường luôn được hiểu là vận tốc trung bình.Gỉa sử trong thời gian t (giây) ta thực hiện n lần dịch bước(một lần dịch 1 bước) thì tần số dịch bước là f = n/t.Gỉa sử góc bước của động cơ là thì để đạt được 1 vòng quay ta phải cho động cơ quay 360 / bứoc quay.Vận tốc trung bình V của động cơ bước trong thời gian t giây là:
Việc điều khiển vận tốc động cơ bước thực hiện bằng cách thay đổi tần số dịch bước. Lưu ý rằng tần số dịch bước f trong truờng hợp tổng quát không đồng nhất với tần số

các xung điều khiển, mà nó là tổng hợp của sự biến đổi các trạng thái của các xung điều khiển đó. Vì vậy việc điều khiển này thường được thực hiện bởi các bộ vi xử lý. Nhìn vào đó thì mômen-vận tốc của động cơ bước (ví dụ ở Catalog 1,Catalog 2,Catalog3) có thể thấy rằng vowis vận tốc dưới 5 vòng/giây (300 vòng/ phút), động cơ còn giữ được mômen cực đại; trên vận tốc này mômen của động cơ sẽ bị giảm dần theo chiều tăng của vận tốc. Do đó việc lựa chọn tải trọng và vận tốc quay cực đại phải được tính toán trước khi thiết kế hệ truyền động sử dụng động cơ bước.Một yếu tố rất quan trọng đối với động cơ bước là vận tốc tức thời, vận tốc này phải nhỏ hơn vận tốc cực đại đã được tính toán với một tải trọng cho trước.Gọi T là thời gian giữa hai lần chuyển bước liên tiếp, từ công thức (28) ta tính được vận tốc tức thời V :
Thời gian T không nhất thiết phải cố định nhưng phải bảo đảm điều kiện:
ĐIỀU KHIỂN CHIỀU QUAY CỦA ĐỘNG CƠ BƯỚCChiều quay của động cơ một chiều có thể thay đổi bằng cách đỏ chiều dòng điện cấp vào.Đối với động cơ bước, chiều quay nhìn chung không đồng nhất với chiều dòng điện cấp cho các cuộn dây mà nó phụ thuộc vào thứ tự chuyển dịch các bước. Chẳng hạn, rôto dang ở vị trí bước thứ (n+1) thì động cơ quay phải; nếu ta cấp điện sao cho rôto chuyển sang bước thứ (n-1) thì động cơ quay trái. Bộ tạo xung điều khiển sẽ thực hiện điều này.Chiều quay của động cơ bướ được xác định bằng thứ tự chuyển dịch các trạng thái cấp điện của các cuộn dây stato. Đối với động cơ 2 pha, nếu điều khiển cả bước, có 4 trạng thái cấp điện; nếu điều khiển nửa bước, có 4 trạng thái cấp điện; nếu điều khiển nửa bước, sẽ có 8 trạng thái cấp điệnĐối với động cơ 4 pha, nếu cấp xung 1 cực thì cũng có 4 và 8 trạng thái cấp điện vào các cuộn dây cho 2 trường hợp điều khiển cả bước và nửa bước.Bảng 1 nêu các trạng thái cấp điện 2 hteo cách đơn giản nhất cho 4 cuộn dây pha.Bảng 1. Trạng thái cấp điện các pha của động cơ 4 pha.
Trạng thái
Cuộn dây 1 2 3 4 5 6 7 8Cuộn 1 1 1 0 0 0 0 0 1Cuộn 2 0 1. 1 1 0 0 0 0Cuộn 3 0 0 0 1 1 1 0 0Cuộn 4 0 0 0 0 0 1 1 1
Vấn đề cốt lõi của việc điều khiển động cơ bước là cấp điện lúc động cơ dừng - giữ.Do đó sẽ là sai lầm lớn nếu ta chỉ cấp xung điều khiển lúc động cơ quay còn lúc dừng thì không cấp xug điều khiển. (Điều này thường thấy khi người thiết kế chuă

nắm chắc bản chất của việc điều khiển động cơ bước)MÔĐUN ĐIỀU KHIỂN CÔNG SUẤT CHO ĐỘNG CƠ BƯỚC 4 CUỘN DÂY PHA ( m=4 )Đối với động cơ nhiều pha để giảm mức độ phức tạo cho mạch điều khiển ta thường sử dụng các xung đơn cực.Bước K tính theo công thức K=n . 360/ { gócbước tính bằng độ,n hệ số( số vi bước trong một bước,đối với trường hợp điều khiển vi bước }I ĐIỀU KHIỂN BẰNG NGUỒN DÒNGMỗi pha được cấp một nguồn dòng riêng biệt, các bóng bán dẫn Q , Q ,Q và Q làm nhiệm vụ chuyển mạch điện tử; điều khiển các bán dẫn này là các xung X X X và X ; các điôt D D ,D và D làm nhiệm vụ xả năng lượng lại nguồn , dập xung ngược khi các bóng bán dẫn ngắt mạch
Sơ đồ nguyên lí mạch điều khiển bằng nguồn dòng cho động cơ 4 pha

Giản đồ xung điều khiển cả bước động cơ 4 pha

2 ĐIỀU KHIỂN L/R VÀ ĐỘ RỘNG XUNGĐối với điều khiên L/R hoặc điều khiển bằng độ rộng xung với mạch công suất như hình
Sơ đồ nguyên lí mạch điều khiển động cơ 4 pha theo kiểu L/R và độ rộng xungToàn mạch được cấp một nguồn điện áp Vcc, nguồn này có khả năng cấp được dòng điện 2 lần I , bởi vì có thời điểm 2 cuộn dây pha cần phải được cấp dòng.Trong trường hợp điều khiển bằng độ rộng xung thì điện trở Rs có thể được nối tắt vì dòng cực đại được khống chế bằng độ rộng xung điều khiển.Các xung điều khiển X X X và X vẫn có dạng sơ đô giản đồ xung điều khiển như trên chỉ khác là đối với điều khiển bằng độ rộng xung thì trong các khoảng thời gian mà các xung điều khiển ở mức thấp được thay bằng tần số 20kHz.

3 ĐIỀU KHIỂN BẰNG ĐIỆN ÁP HAI MỨC Nếu không điều khiển vi bước thì đây là kiểu điều khiển tối ưu, bởi vì dòng điện vào các pha có thể đặt được và khi đã đặt được thì nó được tự động giám sát.Bốn cuộn dây pha được nối đôi với nhau: pha 1 với pha 3 và pha 2 với pha 4 thành hai cụm điều khiển riêng biệt. Nguồn thấp VL qua 2 điốt được cấp vào các điểm chung, nguồn cao VH cũng cấp vào đó qua 2 bóng bán dẫn điều khiển T và T ; các xung điều khiển nguồn cao tương ứng là các tín hiệu X và X . Hai vi mạch so sánh U và U ảm nhận dòng điện qua các cuộn dây thông qua các điện trở R và R . Độ lớn dòng điện hiệu chỉnh được bằng chiết áp phân áp VR cấp điện áp vào một đầu Input của hai vi mạch so sánh.Các xung điều khiển X X X và X cho hai chế độ cả bước và nửa bước.Ngoài ra, trong chế độ điều khiển cả bước vẫn có thể cấp điện đồng thời cho 2 cuộn dây(để tăng mômen quay)Lưu ý rằng không có thời điểm nào pha 1 và pha 3 cũng như pha 2 và pha 4 đồng thời được cấp điện, do đó trên các R và R bao giờ cũng chỉ có dòng điện tiết kiệm được hai bộ phận điều khiển nguồn cao và hai mạch điện cảm nhậndongf.Hoạt động của mạch công suất này như sau:- Ở trạng thái giữ, tùy thuộc vào các tín hiệu X X X và X mà các bóng bán dẫn tương ứng T , T T và T mở để dòng điện vào các cuộn dây tương ứng từ nguồn thấp VL qua các điốt.- Tại thời điểm dịch bước, X hoặc X , nguồn thấp VL tự động cắt ra khỏi mạch do các điốt tương ứng vào các nguồn VL có phân cực ngược.- Khi dòng điện qua R và R đạt đén giá trị đặt trước , có nghĩa là động cơ đã dịch bước xong, các vi mạch so sánh U và U hạ RS hoặ RS xuống thấp và mạch điều khiển cắt tín hiệu X hoặc X , nguồn VH bị cắt ra khỏi mạch, các điốt tự động cấp nguồn thấp VL vào để tạo dòng điện giữ.- Về phía mạch điều khiển, chỉ khi dịch bước mới đưa X hoặc X lên cao. Sau khi đã đưa X hoặc X lên cao thì nhiệm vụ của mạch điều khiển là giám sát RS hoặ RS ; chỉ khi nào nhận được sườn xuống của tín hiệu cần giám sát và đưa tín hiệu điều khiển(X hoặc X ) xuống thấp xong, mạch điều khiển mới được phép thực hiện các nhiệm vụ khác.
THIẾT KẾ MẠCH TẠO XUNG ĐIỀU KHIỂN TỰ ĐỘNG CƠ BƯỚCCác mạch công suất thiết kế ở các phần trước có thể nối ghép với thiết bị điều khiển để điều khiển động cơ bước. Tuy nhiên, để giảm bớt số đầu dây nối ghép( thuận tiện cho việc truyền tín hiệu đi xa)và giảm tải cho phần mềm điều khiển, ta thiết kế mạch tạo xung điều khiển riêng biệt đi liền với mạch công suất tạo thành một môđun hoàn chỉnh điều khiển động cơ bước.Một cách tổng quát, mạch tạo xung điều khiển sẽ có các đầu vào và đầu ra như sau:a, Đầu vào điều khiển- Đầu vào dịch bước STEP ở dạng xung, tcs dụng bởi sườn lên hoặc sườn xuống.- Đầu vào đảo chiều DIR, tác dụng bởi mức, chẳng hạn: + DIR = 1: Quay phải CW (clock – wise) + DIR = 0: Quay trái CCW (counter – clockwise)-Đầu vào Turn-off :INT (Inhibit)l tcs dụng bởi mức, chẳng hạn: INH = 1:Tun-off INT = 0 : cho phép chạyb, Đầu vào hồi tiếpCác xung cảm nhận dòng hoặc các mức điện áp cảm nhận dòng, mục đích để chuyển từ trạng thái dịch bước sang trạng thái giữ.

c, Đầu ra điều khiển- Các xung điều khiển cuộn dây pha X , X X X v.v…..- Các xung điều khiển chuyển chế độ dịch bước sang chế độ giữ.- Xung Turn-off INT cho mạch công suát (nếu có).Trường hợp đặc biệt, đối với chế độ điều khiển vi bước, cần có mạch tạo xung điều khiển bặc chủng.Mạch taọ xung có thể thiết kế trên các công cụ sau đây:1. Thiết kế bằng vi mach rời.2. Thiết kế bằng bộ vi xử lý, chẳng hạn xử dụng Microcontroller 89C51.3. Thiết kế bằng các linh kiện lập trình như các loại PAL, GAL, công nghệ AISC.4. Thiết kế trên cơ sở sử dụng các chip đặc chủng cho điều khiẻn đông cơ bước. Sau đây tôi xin giới thiệu về mạch tạo xung điều khiển bằng vi xử lý (AT89C51):Thuận lợi có cấu hình gọn nhẹ nhất cho nhiệm vụ nỳ lf sử dụng Microcontroller 89C51.Các đầu ra – vào được định nghĩa như sau:a, Đầu ra điều khiển các cuộn dây pha: 10 đầu r từ X X sử dụng cổng P và 2 bit cổng P của chip.- Điều khiển động cơ 2 pha và 4 pha: 4 tín hiệu, ví dụ X X .- Điều khiển động cơ 5 pha ở chế đô cả bước : 5 tín hiệu, chẳng hạn X X .- Điều khiển động cơ 5 pha ở chế độ nửa bước : 10 tín hiệu, X X b, Đàu ra điều khiển dòng áp- Tín hiệu INH (P .2): tắt công suất (Turn-off).- Tín hiệu Y và Y P .3 và P .4 : điều khiển nguồn cao VHV khi dịch bước, sử dụng trong trường hợp điều khiển điện áp hai bước. - Tín hiệu chopper Z (P .5) để điều khiển công suất theo độ rộng xung.c, Đầu vào hồi tiếp F và F (P .6 và P .7) để chuyển trạng thái dịch bước sang trạng thái giữ (F và F lên 1 khi các cuộn dây pha đạt dòng điện đã hạn trước).d, Đầu vào dừng hoặc đảo chiều khẩn cấp- Tín hiệu INH (INTO) là tín hiệu ngắt có mức ưu tiên cao nhát, khi active thì chip Turn-off phàn công suất Tín hiệu IN 1 (INT1) ngắt ưu tiên số hai : có thể dùng cho tín hiệu hạn biên hoặc yêu cầu điều khiển bằng tay, tạm dừng việc điều khiển tự động.e, Đầu vào tín hiệu truyền thông nối tiếpTín hiệu R D và T D được chuyển mức theo tiêu chuẩn truyền nối tiếp qua vi mạch MAX 232, phục vụ cho việc điều khiển tự động từ trung tâm.g, Đầu vào điều khiển song song Toàn bộ cổng Po và 4 bit cổng P dành cho truyền số liệu song song liên hệ với trung tâm điều khiển. Tuy nhiên 1 số bit trong nhóm này ví dụ 4 bit cổng P vẫn có thể được dùng làm đầu vào cho các cơ cấu điều khiển bằng tay tác động trực tiếp vào động cơ mà không phải thông qua trung tâm điều khiển. Một đặc điểm của 89C51 là với cach sử dụng này thì bát kì bit nào của 3 cổng P ,P ,P (tổng cộng 24bit) có thể định nghĩa đầu vào và đầu r.Do đó cáu hình vẫn như vậy,chỉ thay đổi chương trình phàn mềm nạp vào là ta có một cách điều khiển mới Mạch sử dụng Microcontroller để tạo xung điều khiển có các ưu điểm sau:-Cùng một cấu hình có thể sử dụng cho điều khiển các loại động cơ khác nhau, ở các chế độ khác nhau.- Sử dụng được cho chế độ điều khiển vi bước khi đi kèm với nguồn dòng có điều khiển- Với hai đường truyền số liệu song song và nối tiếp, trung tâm điều khiển có thể cấp ra các dữ liệu :số bước cần dịch chuyển, tốc độ uay, chiều quay…các số liệu này được

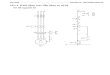
lưu trữ trong bộ nhớ của 89C51. Do đó có thể “tự lo”được một phần việc điều khiển cục bộ.- Vẫn một cấ hình như trên, có đủ đầu ra để điều khiển 2 động cơ cùng một lúc. Do đó có thể đồng bộ chuyển động quay của 2 trục.- Trong trường hợp điều khiển có hồi tiếp về vị trí, có thể ghép một cách dễ dàng bộ đọc vị trí thực của đối tượng điều khiển để tạo thành môđun điều khiển vị trí khép kín, có thể đưa đối tượng điều khiển đến vị trí bất kỳ cho trước bởi Trung tâm điều khiển Ta có sơ đồ giao tiếp giữa 8051 với động cơ bước
BÀI TIỂU LUẬN :
IV.Tài liệu tham khảo Giáo trình Vi xử lý, tác giả: Phạm Quang Trí.Phạm Hữu LộcGiáo trình :Động cơ bước kỹ thuật điều khiển và ứng dụng: tác giả Phạm Quang Hùng
ứng dụng điều khiển góc quay,chiều quay của động cơ theo nút ấn

$MOD51 ORG 00HMAIN: ACALL SWITCH SJMP MAIN;**************************************************** SWITCH: MOV P1,#0FFH MOV P2,#00HSW0: JNB P1.0,SW0OK SJMP SW1SW0OK: ACALL StopSW1: JNB P1.1,SW1OK SJMP SW2 SW1OK: ACALL RightSW2: JNB P1.2,SW2OK SJMP SW0 SW2OK: ACALL Left RET;**************************************************** Stop: MOV P1,#0FFH MOV P2,#00H

SJMP MAIN RET;**************************************************** Right: MOV R1,#0 MOV A,#01H Stepnextright: JNB P1.0,SW0OK JNB P1.2,SW2OK MOV P2,A ACALL DELAY RL A INC R1 CJNE A,#10H,Nextright MOV A,#01H Nextright: CJNE R1,#250,Stepnextright ;1 vong 250 buoc RET;**************************************************** Left: MOV R1,#0 MOV A,#08H Stepnextleft: JNB P1.0,SW0OK JNB P1.1,SW1OK MOV P2,A ACALL DELAY RR A INC R1 CJNE A,#80H,Nextleft MOV A,#08H Nextleft: CJNE R1,#250,Stepnextleft ;1 vong 250 buoc RET;**************************************************** & amp; nbsp; DELAY: ;Chuong trinh tao tre 1s PUSH 00H MOV R0,#100 MOV TMOD,#01HLOOP2: MOV TH0,#HIGH(-10000) MOV TL0,#LOW(-10000) SETB TR0 JNB TF0,$ CLR TR0 CLR TF0 DJNZ R0,LOOP2 POP 00H RET END

Read more: http://www.ant7.com/forum/forum_posts.asp?TID=7023#ixzz1M3vyuepM