Embed Size (px)
Citation preview

MAKING MODERN LIVING POSSIBLE
Dokumentacja techniczno-ruchowaVLT® AutomationDrive FC 300

Bezpieczeństwo
OSTRZEŻENIEWYSOKIE NAPIĘCIE!Po podłączeniu zasilania wejściowego AC w przetwornicyczęstotliwości występuje wysokie napięcie. Instalacja,rozruch i konserwacja powinny być wykonywane wyłącznieprzez wykwalifikowany personel. Prowadzenie instalacji,rozruchu i konserwacji przez inne osoby grozi śmiercią lubpoważnymi obrażeniami.
Wysokie napięciePrzetwornice częstotliwości są podłączone do źródełniebezpiecznego napięcia zasilania. Należy zachowaćszczególną ostrożność, aby chronić się przed porażeniemelektrycznym. Instalację, rozruch i konserwację wolnoprowadzić wyłącznie osobom przeszkolonym z zakresuurządzeń elektronicznych.
OSTRZEŻENIEPRZYPADKOWY ROZRUCH!Jeżeli przetwornica częstotliwości jest podłączona dozasilania AC, silnik może zostać uruchomiony w każdejchwili. Przetwornica częstotliwości, silnik oraz pozostałeurządzenia zasilające muszą być w stanie gotowości dopracy. Brak gotowości urządzeń do pracy w czasiepodłączenia przetwornicy częstotliwości do zasilania ACmoże doprowadzić do śmierci, poważnych obrażeń lubuszkodzenia mienia.
Przypadkowy rozruchJeżeli przetwornica częstotliwości jest podłączona dozasilania AC, silnik może zostać uruchomiony za pomocąprzełącznika zewnętrznego, poleceniem przesłanym przezmagistralę szeregową, sygnałem wejściowym wartościzadanej lub poprzez usunięcie błędu. Należy zastosowaćodpowiednie środki uniemożliwiające przypadkowyrozruch.
OSTRZEŻENIECZAS WYŁADOWANIA!Przetwornice częstotliwości zawierają kondensatoryobwodu DC, które pozostają naładowane po odłączeniuzasilania od przetwornicy. W celu uniknięcia porażeniaprądem należy odłączyć zasilanie AC, wszystkie silnikielektryczne z magnesami trwałymi oraz wszelkie zdalneźródła zasilania obwodu DC, w tym zasilanie akumula-torowe, UPS i obwody DC połączone z innymiprzetwornicami częstotliwości. Przed przystąpieniem doczynności obsługowych lub napraw należy odczekać ażkondensatory w pełni rozładują się. Czas oczekiwaniaokreślono w tabeli Czas wyładowania. Serwisowanie lubnaprawy w razie nierozładowania urządzenia możeskutkować śmiercią lub poważnymi obrażeniami.
Napięcie (V) Minimalny czas oczekiwania (minuty)
4 15
200 - 240 0,25–3,7 kW 5,5–37 kW
380 - 480 0,25–7,5 kW 11 - 75kW
525 - 600 0,75–7,5 kW 11 - 75kW
525 - 690 nie dot. 11 - 75 kW
Wysokie napięcie występuje nawet gdy diody są wyłączone!
Czas wyładowania
SymboleW niniejszej instrukcji wykorzystano poniższe symbole:
OSTRZEŻENIEOznacza potencjalnie niebezpieczną sytuację, która, jeśli siędo niej dopuści, może skutkować śmiercią lub poważnymiobrażeniami.
UWAGAOznacza potencjalnie niebezpieczną sytuację, która, jeśli siędo niej dopuści, może skutkować niewielkimi lub umiarko-wanymi obrażeniami. Może również przestrzegać przedniebezpiecznymi działaniami.
UWAGAWskazuje sytuację, która może skutkować wyłącznieuszkodzeniem sprzętu lub mienia.
WAŻNEOznacza wyszczególnioną informację, do której należy sięstosować aby nie dopuścić do błędów ani użytkowaniaurządzenia poniżej optymalnych parametrów sprawności.
Zezwolenia
Tabela 1.2
Bezpieczeństwo Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss

Bezpieczeństwo Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss

Spis zawartości
1 Wprowadzenie 4
1.1 Cel podręcznika 5
1.2 Materiały dodatkowe 5
1.3 Opis produktu 6
1.4 Wewnętrzne funkcje sterownika przetwornicy częstotliwości 6
1.5 Wymiary ram i wartości znamionowe mocy 7
2 Instalacja 8
2.1 Wykaz czynności kontrolnych w miejscu instalacji 8
2.2 Wykaz czynności kontrolnych dla montażu wstępnego silnika i przetwornicyczęstotliwości 8
2.3 Instalacja mechaniczna 8
2.3.1 Chłodzenie 8
2.3.2 Podnoszenie 9
2.3.3 Montaż 9
2.3.4 Momenty dokręcania 9
2.4 Instalacja elektryczna 10
2.4.1 Wymagania 12
2.4.2 Wymogi względem uziemienia 12
2.4.2.1 Prąd upływowy (> 3,5 mA) 13
2.4.2.2 Uziemienie za pomocą kabla ekranowanego 13
2.4.3 Podłączenie silnika 14
2.4.4 Podłączanie zasilania AC 14
2.4.5 Okablowanie sterowania 15
2.4.5.1 Dostęp 15
2.4.5.2 Typy zacisków sterowania 15
2.4.5.3 Podłączanie do zacisków sterowania 16
2.4.5.4 Ekranowane przewody sterownicze 17
2.4.5.5 Funkcje zacisków sterowania 17
2.4.5.6 Zaciski zwierane 12 i 27 18
2.4.5.7 Przełączniki zacisków 53 i 54 18
2.4.5.8 Zacisk 37 18
2.4.5.9 Sterowanie hamulcem mechanicznym 22
2.4.6 Komunikacja szeregowa 22
3 Rozruch i próba działania 24
3.1 Rozruch wstępny 24
3.1.1 Kontrola bezpieczeństwa 24
3.1.2 Wykaz czynności kontrolnych rozruchowych 25
3.2 Podłączanie zasilania do przetwornicy częstotliwości 26
Spis zawartości Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 1

3.3 Podstawowe procedury programowania pracy 26
3.4 Automatyczne dopasowanie silnika 27
3.5 Sprawdzenie obrotów silnika 28
3.6 Sprawdzenie obrotów enkodera 28
3.7 Test sterowania lokalnego 29
3.8 Rozruch systemu 29
4 Interfejs użytkownika 30
4.1 Lokalny panel sterowania 30
4.1.1 Układ LCP 30
4.1.2 Konfiguracja wartości wyświetlacza LCP 31
4.1.3 Przyciski menu wyświetlacza 31
4.1.4 Przyciski nawigacyjne 32
4.1.5 Przyciski funkcyjne 32
4.2 Kopia zapasowa i kopiowanie ustawień parametrów 33
4.2.1 Ładowanie danych do LCP 33
4.2.2 Pobieranie danych z LCP 33
4.3 Przywracanie ustawień domyślnych 33
4.3.1 Inicjalizacja zalecana 33
4.3.2 Ręczna inicjalizacja 34
5 O programowaniu przetwornic częstotliwości 35
5.1 Wprowadzenie 35
5.2 Przykład programowania 35
5.3 Przykłady programowania zacisku sterowania 36
5.4 Ustawienia parametrów domyślne dla regionu Międzynarodowy/AmerykaPółnocna 37
5.5 Struktura menu parametrów 38
5.5.1 Struktura głównego menu 39
5.6 Zdalne programowanie z oprogramowaniem konfiguracyjnym MCT-10 43
6 Przykłady konfiguracji zastosowań 44
6.1 Wprowadzenie 44
6.2 Przykłady zastosowań 44
7 Komunikaty na temat statusu 50
7.1 Wyświetlacz statusu 50
7.2 Tabela opisów komunikatów statusowych 50
8 Ostrzeżenia i alarmy 53
8.1 Monitoring systemu 53
8.2 Typy ostrzeżeń i alarmów 53
8.3 Wyświetlane ostrzeżenia i alarmy 53
Spis zawartości Dokumentacja techniczno-ruchowa VLT® AutomationDrive
2 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss

8.4 Ostrzeżenie i alarm 55
8.4.1 Komunikaty o błędach 57
9 Podstawowe informacje o wykrywaniu i usuwaniu usterek 66
9.1 Rozruch i obsługa 66
10 Dane techniczne 69
10.1 Powiązane z mocą specyfikacje 69
10.2 Ogólne dane techniczne 81
10.3 Tabele bezpieczników 86
10.3.1 Zalecenia 86
10.3.2 Zgodność z CE 86
10.4 Momenty dokręcania złączy 95
Indeks 96
Spis zawartości Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 3

1 Wprowadzenie
1
23
4
5
6
7
8
9
10
11
1213
14
8
15
16
17
18
130B
B492
.10
Ilustracja 1.1 Rysunek zespołu rozebranego, A1-A3, IP20
1 LCP 10 Zaciski wyjściowe silnika 96 (U), 97 (V), 98 (W)
2 Złącze magistrali szeregowej RS-485 (+68, -69) 11 Przekaźnik 1 (01, 02, 03)
3 Złącze We/Wy analogowego 12 Przekaźnik 2 (04, 05, 06)
4 Wtyczka wejścia LCP 13 Zacisk hamulca (-81, +82) i podziału obciążenia (-88, +89)
5 Przełączniki analogowe (A53), (A54) 14 Zaciski wejściowe zasilania 91 (L1), 92 (L2), 93 (L3)
6 Odciążenie naprężenia kabla/uziemienie PE 15 Złącze USB
7 płytką odsprzęgającą 16 Przełącznik zacisku magistrali szeregowej
8 Zacisk uziemienia (PE) 17 We/Wy cyfrowe i zasilanie 24 V
9 Zacisk uziemienia kabla ekranowanego i odciążenienaprężenia
18 Płyta pokrywy przewodów sterowniczych
Tabela 1.1
Wprowadzenie Dokumentacja techniczno-ruchowa VLT® AutomationDrive
4 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
11

1
2
3
4
5
6
7
8
9
10
11
12 13
1617
1819
1415
FAN MOUNTING
QDF-30
DC- DC+
Remove jumper to activate Safe StopMax. 24 Volt !
12 13 18 19 27 29 32 33 20
61 6839 42 50 53 54
0605
0403
0201
130B
B493
.10
Ilustracja 1.2 Rysunek zespołu rozebranego, rozmiar B i C, IP55/66
1 LCP 11 Przekaźnik 2 (04, 05, 06)
2 Osłona 12 Pierścień do podnoszenia
3 Złącze magistrali szeregowej RS-485 13 Otwór montażowy
4 We/Wy cyfrowe i zasilanie 24 V 14 Zacisk uziemienia (PE)
5 Złącze We/Wy analogowego 15 Odciążenie naprężenia kabla/uziemienie PE
6 Odciążenie naprężenia kabla/uziemienie PE 16 Zacisk hamulca (-81, +82)
7 Złącze USB 17 Zacisk podziału obciążenia (magistrali DC) (-88, +89)
8 Przełącznik zacisku magistrali szeregowej 18 Zaciski wyjściowe silnika 96 (U), 97 (V), 98 (W)
9 Przełączniki analogowe (A53), (A54) 19 Zaciski wejściowe zasilania 91 (L1), 92 (L2), 93 (L3)
10 Przekaźnik 1 (01, 02, 03)
Tabela 1.2
1.1 Cel podręcznika
Niniejszy podręcznik zawiera szczegółowe informacje natemat instalacji i rozruchu przetwornicy częstotliwości. Wrozdziale 2 "Instalacja" przedstawiono wymaganiadotyczące instalacji mechanicznej i elektrycznej, wraz zokablowaniem wejściowym, silnika, sterowania ikomunikacji szeregowej, a także funkcjami zaciskówsterowania. W rozdziale 3 "Rozruch i próba działania"przedstawiono szczegółowe instrukcje rozruchu, podsta-wowych procedur programowania pracy i prób działania.Pozostałe rozdziały przedstawiają dodatkowe informacje.
Są to między innymi informacje na temat interfejsuużytkownika, podstawowych zasad działania, szczegó-łowych przykładów programowania i aplikacji, wykrywania iusuwania usterek podczas rozruchu oraz danychtechnicznych urządzenia.
1.2 Materiały dodatkowe
Dostępne są dodatkowe materiały opisujące zaawan-sowane funkcje i procedury programowania przetwornicaczęstotliwości.
Wprowadzenie Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 5
1 1

• Przewodnik programowania zawiera szczegółoweinformacje o pracy z parametrami oraz wieleprzykładów aplikacji.
• Zalecenia Projektowe opisują szczegółowomożliwości i funkcjonalności pomocne w projek-towaniu układów sterowania silnikami.
• Danfoss oferuje także uzupełniające publikacje ipodręczniki.Ich wykaz znajduje się pod adresem http://www.danfoss.com/Products/Literature/Technical+Documentation.htm
• Dostępne wyposażenie opcjonalne może wpłynąćna niektóre z opisanych tu procedur. Pamiętaj,aby zapoznać się z wymaganiami zawartymi winstrukcjach dostarczonych z wyposażeniemopcjonalnym.
Skontaktuj się z najbliższym przedstawicielem Danfoss lubwejdź nahttp://www.danfoss.com/Products/Literature/Technical+Documentation.htm gdzie zamieszczono materiały dopobrania i informacje dodatkowe.
1.3 Opis produktu
Przetwornica częstotliwości jest elektroniczym regulatoremsilnika który przetwarza zasilanie AC na wejściu w zasilaniewyjściowe AC o zmiennym kształcie fali. Częstotliwość inapięcie wyjścia są regulowane w taki sposób, abysterować prędkością lub momentem obrotowym silnika.Przetwornica częstotliwości zmienia prędkość silnika wodpowiedzi na sprzężenie zwrotne z systemu, np. zmianętemperatury lub ciśnienia sterowania wentylatorów,sprężarek lub silników pomp. Przetwornica częstotliwościmoże także sterować silnikiem poprzez reakcję na zdalnepolecenia wysyłane z peryferyjnych sterowników.
Ponadto przetwornica częstotliwości nadzoruje stan silnikai systemu, przekazuje ostrzeżenia lub alarmy o błędach,zatrzymuje i uruchamia silnik, optymalizuje wydajnośćenergetyczną, a także umożliwia koszystanie z wielu innychfunkcji sterowania, nadzoru i wydajności. Funkcje pracy inadzoru są przedstawiane w postaci wskazań stanu przeka-zywanych do zewnętrznego systemu sterowania lubpoprzez sieć komunikacji szeregowej.
1.4 Wewnętrzne funkcje sterownikaprzetwornicy częstotliwości
Poniższa ilustracja przedstawia schemat blokowy częściskładowych przetwornicy częstotliwości. Ich funkcjeprzedstawiono w Tabela 1.3.
Ilustracja 1.3 Schemat blokowy Przetwornica częstotliwości
Obszar Tytuł Funkcje1 Wejście zasilania • Zasilanie AC trójfazowe
przetwornica częstotliwości
2 Prostownik • Mostek prostownikaprzekształca prąd AC wejściana prąd DC do zasilaniainwertera
3 Magistrala DC • Obwód pośredni szyny DCprzetwornicy częstotliwościprzekazuje prąd DC
4 Dławiki DC • Filtrują napięcie obwodupośredniego DC
• Zapewniają ochronęprzejściową obwodu
• Zmniejszają prąd RMS
• Podnoszą współczynnik mocywracającej do obwodu
• Zmniejszają harmonikęwejścia AC
5 Bateria konden-satorów
• Przechowuje moc DC
• Zapewnia zasilanie podczaskrótkich zaników mocy
6 Inwerter • Przekształca prąd DC wsterowany prąd zmienny oukształtowanej fali imodulowanym czasie trwaniaimpulsu do sterowaniazmiennym wyjściem dlasilnika.
7 Wyjście do silnika • Sterowane zasilanie wyjściowetrójfazowym prądemzmiennym do silnika.
Wprowadzenie Dokumentacja techniczno-ruchowa VLT® AutomationDrive
6 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
11

Obszar Tytuł Funkcje8 Obwód sterowania • Moc wejścia, przetwarzanie
wewnętrzne, wyjście oraz prądsilnika są nadzorowane w celuwydajnej pracy i kontroli
• Interfejs użytkownika orazpolecenia zewnętrzne sąnadzorowane i wykonywane
• Możliwe jest udostępnieniesterowania i wyjścia statusu
Tabela 1.3 Części składowe Przetwornica częstotliwości
1.5 Wymiary ram i wartości znamionowe mocy
Wymiar ramy (kW)
Wolty A1 A2 A3 A4 A5 B1 B2 B3 B4 C1 C2 C3 C4
200-240 0.25-1.5 0.25-2.2 3.0-3.7 0.25-2.2 0.25-3.7 5.5-7.5 11 5.5-7.5 11-15 15-22 30-37 18,5–22 30-37
380-480 0.37-1.5 0.37-4.0 5.5-7.5 0.37-4.0 0.37-7.5 11-15 18,5–22 11-15 18,5–30 30-45 55-75 37-45 55-75
525-600 N/A N/A 0.75-7.5 N/A 0.75-7.5 11-15 18,5–22 11-15 18,5–30 30-45 55-90 37-45 55-90
525-690 N/A N/A N/A N/A N/A N/A 11-22 N/A N/A N/A 30-75 N/A N/A
Tabela 1.4 Wymiary ram i wartości znamionowe mocy
Wprowadzenie Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 7
1 1

2 Instalacja
2.1 Wykaz czynności kontrolnych w miejscuinstalacji
• Chłodzenie przetwornica częstotliwości opiera sięna obiegu powietrza z otoczenia. Należyprzestrzegać wartości granicznych powietrzaotoczenia, co umożliwi optymalną pracę
• Należy upewnić się, czy miejsce instalacji mawystarczającą nośność, by umożliwić montażprzetwornica częstotliwości.
• Wnętrze przetwornica częstotliwości musi byćzawsze wolne od kurzu i brudu. Należy upewnićsię, że podzespoły są tak czyste, jak tylkomożliwe. W miejscu prowadzenia pracbudowlanych należy stosować obudowęochronną. Opcjonalne obudowy IP55 (NEMA 12)lub IP66 (NEMA 4) mogą być wymagane.
• Należy zachować niniejszy podręcznik, rysunki ischematy celem wykorzystania ich do instalacji iużytkowania w postaci dokumentacji techniczno-ruchowej. Operatorzy urządzenia muszą miećstały dostęp do niniejszego podręcznika.
• Urządzenie należy umieścić jak najbliżej silnika.Kable silnikowe muszą być jak najkrótsze.Sprawdzić dane techniczne silnika pod kątemrzeczywistych zakresów tolerancji. Nie przekraczaćdługości
• 300 m (1000 stóp) w przypadku nieekra-nowanych kabli silnika
• 150 m (500 stóp) w przypadku kabliekranowanych.
2.2 Wykaz czynności kontrolnych dlamontażu wstępnego silnika iprzetwornicy częstotliwości
• Porównać numer modelu urządzenia, znajdującysię na tabliczce znamionowej z numerem nazamówieniu celem sprawdzenia, czy dostarczonowłaściwe urządzenie
• Należy upewnić się, że poniższe parametry majątożsame napięcia znamionowe:
Zasilanie (moc)
Przetwornica częstotliwości
Silnik
• Należy upewnić się że wartość znamionowaprądu wyjścia przetwornica częstotliwości jest
równa lub większa wartości prądu pod pełnymobciążeniem silnika przy szczytowej wydajnościsilnika.
Rozmiar silnika i moc przetwornicaczęstotliwości muszą zgadzać się zesobą celem zapewnienia właściwejochrony przez przeciążeniem.
Jeżeli wartość znamionowa przetwornicaczęstotliwości jest niższa od silnikowej,nie można osiągnąć pełnej mocy nawale silnika.
2.3 Instalacja mechaniczna
2.3.1 Chłodzenie
• W celu zapewnienia obiegu chłodzenia,urządzenie przymocować do ścisłej, płaskiejpowierzchni lub do opcjonalnej płyty tylnej (patrz2.3.3 Montaż)
• Należy zapewnić odpowiednie odstępy u góry idołu jednostki dla obiegu powietrza chłodzenia.Minimalny odstęp wynosi zazwyczaj 100-225 mm(4-10 cali). Patrz Ilustracja 2.1 - wymaganiadotyczące odstępu
• Niewłaściwy montaż może doprowadzić doprzegrzewania się urządzenia i obniżonejwydajności pracy
• Należy uwzględnić obniżenie wartości znamio-nowych w temperaturze od 40°C (104°F) do 50°C(122°F) i wysokości 1000 m (3300 stóp) n.p.m.Dalsze informacje znajdują się w ZaleceniachProjektowych dla urządzenia.
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
8 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
22

a
b
130B
A41
9.10
Ilustracja 2.1 Odstęp dla obiegu chłodzenia u góry i dołuurządzenia
Obudowa A1-A5 B1-B4 C1, C3 C2, C4
a/b (mm) 100 200 200 225
Tabela 2.1 Wymagania dotyczące minimalnego odstępu dla obiegu powietrza
2.3.2 Podnoszenie
• Należy sprawdzić wagę jednostki, aby określićbezpieczny sposób jej podnoszenia
• Upewnić się, czy urządzenie dźwigoweodpowiada wymaganion tego zadania
• W razie potrzeby przenieść urządzenie za pomocądźwignika, dźwigu lub wózka widłowego oodpowiedniej nośności znamionowej
• Urządzenie należy przenosić za jego odpowiednieuchwyty (jeżeli jest w nie wyposażone)
2.3.3 Montaż
• Urządzenie należy instalować w położeniupionowym
• przetwornica częstotliwości umożliwiają instalacjęprzylegająco, jedna obok drugiej.
• Należy upewnić się, czy miejsce montażu mawystarczającą nośność, by unieść ciężarurządzenia
• Zamocować urządzenie na trwałej, płaskiejpowierzchni lub opcjonalnej płycie tylnej w celu
umożliwienia obiegu powietrza chłodzenia (patrzIlustracja 2.2 i Ilustracja 2.3)
• Niewłaściwy montaż może doprowadzić doprzegrzewania się urządzenia i obniżonejwydajności pracy
• Do montażu naściennego użyć podłużnychotworów montażowych, jeżeli takie zapewniono
130B
A21
9.10
A
Ilustracja 2.2 Poprawny montaż na płycie tylnej
Element A to płyta tylna zamontowana w poprawnysposób, umożliwiający obieg powietrza chłodzeniaurządzenia.
130B
A22
8.10
A
Ilustracja 2.3 Poprawny montaż na szynach
WAŻNEDo montażu na szynach wymaga się płyty tylnej.
2.3.4 Momenty dokręcania
Patrz 10.4.1 Momenty dokręcania złączy gdzie opisanowłaściwe specyfikacje dokręcania.
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 9
2 2

2.4 Instalacja elektryczna
Niniejsza część przedstawia szczegółowe instrukcje podłączania okablowania do przetwornica częstotliwości. Poniżejprzestawiono kolejne działania.
• Podłączanie kabli silnika do zacisków wyjściowych przetwornica częstotliwości
• Podłączanie zasilania AC do przetwornica częstotliwości zacisków wejściowych
• Podłączanie okablowania sterowania i komunikacji szeregowej
• Po zastosowaniu zasilania, sprawdzić programy wejścia i mocy silnika; tj. ich zacisków sterowania pod kątemżądanych funkcji
130BA025.19
91 (L1)92 (L2)93 (L3)
PE
88 (-)89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)0/4-20 mA
12 (+24V OUT)
13 (+24V OUT)
37 (D IN)
18 (D IN)
20 (COM D IN)
10Vdc15mA 130/200mA
+ - + -
(U) 96(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
(P RS-485) 68
(N RS-485) 69
(COM RS-485) 61
0V
5V
S801
0/4-20 mA
RS-485RS-485
03
+10Vdc-10Vdc -
+10Vdc
+10Vdc0/4-20 mA
-10Vdc -
240Vac, 2A
24Vdc
02
01
05
04
06240Vac, 2A
24V (NPN) 0V (PNP)
0V (PNP)24V (NPN)
19 (D IN)
24V (NPN) 0V (PNP)27
24V
0V
(D IN/OUT)
0V (PNP)24V (NPN)
(D IN/OUT)
0V
24V29
24V (NPN) 0V (PNP)
0V (PNP)24V (NPN)
33 (D IN)
32 (D IN)
12
ON
S201ON2
1S202ON/I=0-20mAOFF/U=0-10V
95
400Vac, 2AP 5-00
21 ON
S801
Interfejs
Silnik
3-fazowe
mocy
OFF=Otwarty
(R+) 82
(R-) 81
hamulcaRezystor
*
*
*
zewn.magistraliDC
Zasilacz z
Wyj cie analogowe
ON=Obci ony
(PNP) = ródo(NPN) = Uj cie
Ilustracja 2.4 Podstawowy rysunek schematyczny okablowania.
A = analogowe, D = cyfroweZacisk 37 używany jest dla Bezpiecznego stopu. Aby otrzymać instrukcje na temat instalacji Bezpiecznego Stopu, należyodnieść się do Zaleceń Projektowych FC 300.* Zacisk 37 nie jest załączony do FC 301 (oprócz wymiaru ramy A1). Zacisk 29 i przekaźnik 2 nie działają w FC 301.
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
10 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
22

1
2
3
4
5
6
7
8
PE
UVW
9
L1L2L3PE
130B
B607
.10
10
Ilustracja 2.5 Typowe połączenie elektryczne
1 PLC 6 Odstęp między przewodami sterowniczymi, silnikiem izasilaniem - min. 200 mm (7,9 cala)
2 Przetwornica częstotliwości 7 Silnik, 3 fazy i uziemienie
3 Stycznik wyjściowy (zwykle niezalecany) 8 Zasilanie, 3 fazy i wzmocnione uziemienie
4 Szyna uziemienia (PE) 9 Okablowanie sterowania
5 Zdjęta izolacja przewodu 10 Średnica przekroju przew. wyrównawczych - min. 16 mm2 (0,025cala)
Tabela 2.2
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 11
2 2

2.4.1 Wymagania
OSTRZEŻENIENIEBEZPIECZNE URZĄDZENIE!Obracające się wały i sprzęt elektryczny mogą stanowićniebezpieczeństwo. W związku z tym podczaswykonywania prac elektrycznych należy bezwzględnieprzestrzegać krajowych i lokalnych przepisów elektrotech-nicznych. Instalacja, rozruch i konserwacja powinny byćwykonywane wyłącznie przez przeszkolony i wykwalifi-kowany personel. Niespełnienie niniejszych zaleceń możespowodować śmierć lub poważne obrażenia.
UWAGAIZOLACJA OKABLOWANIA!Przeprowadzić kable wejścia zasilania, kable silnika iokablowanie sterowania w trzech oddzielnych, metalowychkanałach kablowych lub w postaci kabli ekranowanychcelem izolacji szumów o wysokiej częstotliwości. Brakodizolowania kabli zasilania, silnika i sterowania możeskutkować nieoptymalnym działaniem sterownika ipowiązanego sprzętu.
Dla własnego bezpieczeństwa należy przestrzegaćponiższych wymagań.
• Regulatory elektroniczne są podłączone doniebezpiecznego napięcia zasilania. Należyzachować szczególną ostrożność, abyzabezpieczyć się przed porażeniem elektrycznympodczas podłączania mocy do urządzenia.
• Kable silników należy poprowadzić indywidualnieod wielu przetwornic częstotliwości. Napięcieindukowane z kabli wyjścia silnika prowadzonychrazem może spowodować naładowanie konden-satorów w sprzęcie, nawet gdy jest on wyłączonyi oznaczony.
Ochrona przez przeciążeniem i ochrona urządzenia
• Elektronicznie włączana funkcja przetwornicyczęstotliwości zapewnia ochronę przed przecią-żeniem silnika. Przeciążenie posłuży do obliczeniapoziomu wzrostu celem uruchomienia czasufunkcji wyłączenia awaryjnego (zatrzymaniawyjścia regulatora). Im większa wartość poboruprądu, tym szybszy czas reakcji wyłączeniaawaryjnego. Przeciążenie zapewnia klasę 20zabezpieczenia silnika. Szczegółowe informacje natemat funkcji wyłączenia awaryjnego znajdują sięw 8 Ostrzeżenia i alarmy.
• Przewody silnika przenoszą prąd wysokiej częstot-liwości, dlatego też ważne jest, aby przewodyzasilania, zasilania silnika i sterowania byłypowadzone osobno. Do wykonania połączeń użyć
metalowego kanału kablowego lub oddzielonegoprzewodu ekranowanego. Brak odizolowania kablizasilania, silnika i kabli sterowania możeskutkować nieoptymalnym działaniem sterownikai powiązanego sprzętu.
• Wszystkie przetwornice częstotliwości należyzaopatrzyć w zabezpieczenie przeciwzwarciowe iprzeciw przetężeniu. Zabezpieczenie tozapewniają bezpieczniki wejścia - patrzIlustracja 2.6. W przeciwnym wypadku instalatormusi założyć bezpieczniki w ramach wykonywanejinstalacji. Patrz maksymalne wartości znamionowebezpieczników w 10.3 Tabele bezpieczników.
L1
L1
L2
L2
L3
L3
GND
91 92 93Fuses
130B
B460
.10
Ilustracja 2.6 Przetwornica częstotliwości Bezpieczniki
Typy i wartości znamionowe przewodów
• Całe okablowanie musi być zgodne z międzynaro-dowymi oraz lokalnymi przepisami dotyczącymiprzekrojów poprzecznych kabli oraz temperaturyotoczenia.
• Danfoss zaleca wykonanie wszystkich przewodówzasilania kablami o żyłach miedzianych zwartością znamionową co najmniej 75° C.
• Zalecane przekroje żył - patrz 10.1 Powiązane zmocą specyfikacje.
2.4.2 Wymogi względem uziemienia
OSTRZEŻENIENIEBEZPIECZEŃSTWO! UZIEMIENIE!Dla zachowania bezpieczeństwa użytkownika należybezwzględnie wykonać poprawne uziemienie przetwornicaczęstotliwości, zgodnie z krajowymi i lokalnymi normami, atakże z niniejszą instrukcją. Prądy uziemienia przekraczająnatężenie 3,5 mA. Niewykonanie poprawnego uziemieniaprzetwornica częstotliwości może skutkować śmiercią lubpoważnymi obrażeniami.
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
12 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
22

WAŻNEZa poprawne wykonanie uziemienia urządzenia zgodnie zkrajowymi i lokalnymi przepisami i normami elektrotech-nicznymi odpowiada użytkownik lub uprawiony elektrykprowadzący instalację.
• Należy przestrzegać wszystkich krajowych ilokalnych norm elektrotechnicznych dotyczącychprawidłowego uziemiania urządzeń
• Należy bezwzględnie wykonać właściweuziemienie ochronne urządzeń o prądachuziemienia przekraczających 3,5 mA - patrz Prądupływowy (3,5 mA)
• Wejście zasilania, zasilanie silnika i okablowaniesterowania wymagają dedykowanych przewodówuziemiających
• Połączenie uziemienia wykonać za pomocązacisków i uch dostarczonych z urządzeniem.
• Nie wolno uziemiać więcej niż jednejprzetwornica częstotliwości w układziełańcuchowym
• Połączenia kabla uziemienia muszą być jaknajkrótsze
• Zaleca się użycie przewodu linkowego gęstegocelem ograniczenia szumów elektrycznych.
• Należy przestrzegać wymagań producentadotyczących okablowania
2.4.2.1 Prąd upływowy (> 3,5 mA)
Należy przestrzegać krajowych i lokalnych przepisówdotyczących doziemiania urządzeń z prądem upływowymponiżej 3,5 mA.Sposób działania Przetwornica częstotliwości opiera się naprzełączaniu dużej mocy z wysoką częstotliwością.Powoduje to powstawanie prądu upływowego w złączuuziemienia. Prąd zakłóceniowy na zaciskach wyjściazasilania przetwornica częstotliwości może zawieraćskładową prądu stałego, która może ładować kondensatoryfiltra i generować przejściowy prąd doziemienia. Wielkośćprądu upływowego uziemienia zależy konfiguracjiskładowych systemu, np. filtra RFI, ekranów kabli silnika imocy przetwornica częstotliwości.
Norma EN/IEC61800-5-1 (Elektryczne układy napędowemocy o regulowanej prędkości) wymaga zachowaniaszczególnej ostrożności w przypadkach, w których prądupływowy przekracza 3,5 mA. Uziemienie należy wzmocnićna jeden z poniższych sposobów:
• Przekrój przewodu doziemienia musi wynosić conajmniej 10 mm2
• Zastosowanie dwóch oddzielnych przewodówdoziemienia zgodnych z wymaganiamidotyczącymi ich przekroju
Więcej informacji zawarto w normie EN 60364-5-54, §543.7.
Zastosowanie wyłączników różnicowoprądowych RCDW przypadku użycia wyłączników różnicowoprądowych(RCD), zwanych także Earth Leakage Circuit Breaker(wyłącznik różnicowy prądu upływowego doziemienia),należy spełnić poniższe wymagania:
Należy użyć wyłącznie wyłączników RCD typu B,które reagują na prądy stałe i zmienne
Należy użyć wyłączników RCD z opóźnieniemudaru, co zapobiega usterkom powodowanymprzez przejściowe prądy doziemienia
Dobrać wielkość wyłączników RCD do konfiguracjisystemu i środowiska pracy.
2.4.2.2 Uziemienie za pomocą kablaekranowanego
Okablowanie silnika wyposażono w zaciski uziemienia(patrz Ilustracja 2.7).
130B
A26
6.10
+DC BR- B
MA
IN
S
L1 L2 L391 92 93
REL
AY
1
REL
AY
2
99
- LC -
U V W
MOTOR
Ilustracja 2.7 Uziemienie za pomocą kabla ekranowanego
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 13
2 2

2.4.3 Podłączenie silnika
OSTRZEŻENIENAPIĘCIE INDUKOWANE!Wyjściowe kable silników należy poprowadzić indywi-dualnie od wielu przetwornic częstotliwości. Napięcieindukowane z kabli wyjścia silnika prowadzonych razemmoże spowodować naładowanie kondensatorów wsprzęcie, nawet gdy jest on wyłączony i oznaczony.Niepoprowadzenie kabli wyjścia silnika osobno możeskutkować śmiercią lub poważnymi obrażeniami.
• Maksymalne przekroje przewodów - patrz10.1 Powiązane z mocą specyfikacje
• Należy przestrzegać krajowych i lokalnych normzwiązanych z przekrojami przewodów.
• Otwory na kable silnika i panele dostępoweznajdują się u podstawy jednostek o stopniuochrony IP21 lub wyższym (NEMA1/12)
• Nie wolno instalować kondensatorów korekcjiwspółczynnika mocy pomiędzy przetwornicączęstotliwości i silnikiem
• Nie podłączać urządzenia rozruchowego lubprzełącznika biegunowości pomiędzyprzetwornicą częstotliwości i silnikiem
• Podłączyć przewody 3-fazowe silnika do zacisków96 (U), 97 (V) i 98 (W)
• Uziemić przewód zgodnie z przedstawionymiinstrukcjami uziemiania
• Dokręcić zaciski zgodnie z wymaganiamiprzedstawionymi w 10.4.1 Momenty dokręcaniazłączy
• Należy przestrzegać wymagań producentadotyczących okablowania
Ilustracja 2.8 przedstawia wejście zasilania, silnik iuziemienie dla podstawowych typów przetwornic częstot-liwości. Rzeczywista konfiguracja zależy od typu urządzeniai wyposażenia opcjonalnego.
95
130B
B920
.10
+DC BR- B
MA
IN
S
L1 L2 L391 92 93
REL
AY
1
REL
AY
2
99
- LC -
U V W
MOTOR
99
Ilustracja 2.8 Przykład okablowania silnika, zasilania i uziemienia
2.4.4 Podłączanie zasilania AC
• Przekroje przewodów na podstawie wartościprądu wejściowego przetwornica częstotliwości.Patrz maksymalne przekroje przewodów w10.1 Powiązane z mocą specyfikacje.
• W związku z tym należy przestrzegać krajowych ilokalnych norm związanych z przekrojamiprzewodów.
• Podłączyć przewody 3-fazowe zasilania wejścia ACdo zacisków L1, L2 i L3 (patrz Ilustracja 2.8).
• W zależności od konfiguracji urządzenia zasilaniewejściowe podłącza się do zacisków wejściowychzasilania lub rozłącznika wejściowego.
• Uziemić przewód zgodnie z instrukcjamiuziemiania przedstawionymi w 2.4.2 Wymogiwzględem uziemienia
• Każda przetwornica częstotliwości może pracowaćz izolowanym źródłem zasilania wejściowego, jak iz kablami zasilania o zadanej wartości uziemienia.Jeżeli przetwornica częstotliwości jest zasilana zizolowanego źródła (zasilanie IT lub nieuziemionytrójkąt) lub z TT/TN-S z uziemioną nogą(uziemiony trójkąt), należy wyłączyć 14-50 Filtr RFI(WYŁ.). W położeniu wyłączonym wewnętrznekondensatory filtra RFI między obudową iobwodem pośrednim są odłączone, aby zapobiecuszkodzeniu obwodu pośredniego i zredukowaćpojemnościowe prądy doziemne (zgodnie z IEC61800-3).
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
14 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
22

2.4.5 Okablowanie sterowania
• Odizolować okablowanie sterowania odelementów wysokiej mocy przetwornicy częstot-liwości.
• Jeżeli przetwornica częstotliwości jest podłączonado termistora celem izolacji PELV, okablowaniesterowania opcjonalnego termistora powinnomieć wzmocnioną lub podwójną izolację. Zalecasię napięcie zasilania 24 V DC.
2.4.5.1 Dostęp
• Zdjąć pokrywę panelu dostępu za pomocąśrubokręta. Patrz Ilustracja 2.9.
• Lub: zdjąć pokrywę przednią, odkręcając śrubymontażowe. Patrz Ilustracja 2.10.
130B
T248
.10
Ilustracja 2.9 Dostęp do okablowania sterowania dla obudów A2,A3, B3, B4, C3 i C4.
130B
T334
.10
Ilustracja 2.10 Dostęp do okablowania sterowania dla obudówA4, A5, B1, B2, C1 i C2.
Przed dokręceniem pokryw zapoznać się z Tabela 2.3.
Rama IP20 IP21 IP55 IP66
A4/A5 - - 2 2
B1 - * 2,2 2,2
B2 - * 2,2 2,2
C1 - * 2,2 2,2
C2 - * 2,2 2,2
* brak wkrętów do dokręcenia- nie istnieje
Tabela 2.3 Momenty dokręcania pokryw (Nm)
2.4.5.2 Typy zacisków sterowania
Ilustracja 2.11 i przedstawia złącza zdejmowaneprzetwornicy częstotliwości. Funkcje zacisków i ich nastawydomyślne przedstawiono w Tabela 2.5.
23
4
1
130B
B921
.11
Ilustracja 2.11 Położenie zacisków sterowania
12 13 18 19 27 29 32 33 20 37
39 42 50 53 54 5561 68 69
130B
B931
.101
2 3
Ilustracja 2.12 Numery zacisków
• Złącze 1 zawiera cztery programowalne zaciskiwejścia cyfrowego, dwa dodatkowe zaciskicyfrowe programowalne jako wejścia lub wyjścia,zacisk wejściowy napięcia zasilania 24 VDC orazmasy dla opcjonalnego zasilania o napięciu 24VDC. FC 302 i FC 301 (opcjonalne w obudowieA1) zapewnia również wejście cyfrowe dla funkcjiSTO (wyłączenia bezpiecznego momentuobrotowego).
• Zaciski (+)68 i (-)69 złącza 2 służą do podłączeniaszyny komunikacji szeregowej RS-485.
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 15
2 2

• Złącze 3 zawiera dwa wejścia analogowe, jednowyjście analogowe, zasilanie 10 VDC oraz masydla wejść i wyjść
• Złącze 4 jest portem USB do użytku z MCT 10Set-up Software.
• Ponadto znajdują się tam również dwa wyjściaprzekaźnika kształtu C, rozmieszczone w sposóbzależny od rozmiaru i konfiguracji przetwornicyczęstotliwości.
• Część opcji dostępnych na zamówienie zurządzeniem może zawierać dodatkowe zaciski.Patrz podręcznik dostarczony z opcjonalnymwyposażeniem.
Informacje o wartościach znamionowych zaciskówprzedstawiono w punkcie 10.2 Ogólne dane techniczne.
Opis zacisku
Zacisk ParametrUstawieniefabryczne Opis
Wejścia/wyjścia cyfrowe
12, 13 - +24 V DC Napięcie zasilające 24V DC Maksymalnyprąd wyjściowywynosi 200 mAłącznie (130 mA dlaFC 301) dla wszystkichobciążeń 24 V. Dlasygnałów cyfrowychwejściowych orazzewnętrznychprzetworników.
18 5-10 [8] Start
Wejścia cyfrowe.
19 5-11 [10] Zmianakierunkuobrotów
32 5-14 [0] Brakdziałania
33 5-15 [0] Brakdziałania
27 5-12 [2] Wybiegsilnika,odwrócony
Ustawia zacisk jakowejście lub wyjściecyfrowe. Ustawieniemdomyślnym jestfunkcja wejścia.
29 5-13 [14] Pracamanewrowa -JOG
20 - Masa dla wejśćcyfrowych i zaciskbeznapięciowy dlazasilania 24 V.
37 - Wył.bezpiecznymoment (STO)
Wejście bezpieczne.Służy do STO.
Wejścia/wyjścia analogowe
39 -
Masa wyjściaanalogowego
Opis zacisku
Zacisk ParametrUstawieniefabryczne Opis
42 6-50 [0] Brakdziałania
Programowalnewyjście analogowe.Sygnał analogowy maparametry 0–20 mAlub 4–20 mA dla
maksymalnie 500Ω.
50 - +10 V DC Zasilanie analogowe10 VDC. Dla potencjo-metrów i termistorówużywa sięmaksymalnie 15 mA.
53 6-1*Wartośćzadana
Wejście analogowe.Konfigurowalne dlanapięcia lub prądu.Przełączniki A53 i A54pozwalają wybraćmiędzy mA i V.
54 6-2* Sprzężeniezwrotne
55 -
Masa dla wejściaanalogowego
Tabela 2.4
Opis zacisku
Zacisk ParametrUstawieniefabryczne Opis
Komunikacja szeregowa
61 -
Zintegrowany filtr RCdla ekranu kabla.Służy WYŁĄCZNIE dopodłączania ekranu wrazie problemów zEMC.
68 (+) 8-3* Interfejs RS-485. Dopołączenia rezystancjizakończenia na karciesterującej znajduje sięprzełącznik.
69 (-) 8-3*
Przekaźniki
01, 02, 03 5-40 [0][0] Brakdziałania
Wyjście przekaźnikakształtu C. Dopodłączenia napięciaAC lub DC orazobciążenia oporowegolub indukcyjnego.
04, 05, 06 5-40 [1] [0] Brakdziałania
Tabela 2.5 Opis zacisku
2.4.5.3 Podłączanie do zacisków sterowania
Złącza zacisków sterowania można odpiąć od przetwornicaczęstotliwości, aby ułatwić jej instalację, co przedstawionona Ilustracja 2.11.
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
16 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
22

1. Otworzyć styk, wsuwając mały śrubokręt wszczelinę nad lub pod stykiem, w sposóbprzedstawiony na Ilustracja 2.13.
2. Do styku wsunąć odsłoniętą końcówkę przewodusterowania.
3. Wyjąć śrubokręt, aby styk zacisnął się naprzewodzie sterowania.
4. Upewnić się, czy styk trzyma mocno i że przewódnie jest obluzowany. Luźne przewody sterowaniamogą powodować usterki urządzeń lubnieoptymalną pracę.
Przekroje przewodów do zacisków sterowaniaprzedstawiono w 10.1 Powiązane z mocą specyfikacje.
Typowe podłączenia okablowania sterowaniaprzedstawiono w 6 Przykłady konfiguracji zastosowań.
2
1
10 m
m
130B
A31
0.10
12 13 18 19 27 29 32 33
Ilustracja 2.13 Podłączanie okablowania sterowania
2.4.5.4 Ekranowane przewody sterownicze
Prawidłowe ekranowanieNajczęściej preferowaną metodą jest zabezpieczenie kablisterowniczych i komunikacji szeregowej za pomocązacisków ekranu na obu końcach kabla, co zapewnianajwyższą styczność kabli wysokiej częstotliwości.Jeśli potencjał uziemienia między przetwornicą częstot-liwości i PLC jest różny, mogą wystąpić zakłóceniaelektryczne zaburzające pracę całego systemu. Należyrozwiązać ten problem montując kabel wyrównawczy obokprzewodu sterowniczego. Minimalny przekrój poprzecznykabla: 16 mm2.
12
PE
FC
PE
PLC
130B
B922
.11
PE PE
Ilustracja 2.14
Pętle doziemienia 50/60 HzJeśli zastosowano bardzo długie przewody sterownicze,mogą wystąpić pętle doziemienia. Można zlikwidować
pętle doziemienia, podłączając jeden koniec ekranu douziemienia przez kondensator 100 nF (spinający przewody).
100nF
FC
PEPE
PLC
130B
B609
.11
Ilustracja 2.15
Unikanie szumu EMC w kablach komunikacji szeregowejTen zacisk jest podłączony do uziemienia przez obwódwewnętrzny RC. Należy użyć kabli dwużyłowychskręcanych, aby ograniczyć zakłócenia między przewodami.Poniżej przedstawiono zalecaną metodę:
PE
FC
PE
FC
130B
B923
.11
PE PE
696861
696861
12
Ilustracja 2.16
Można również pominąć połączenie z zaciskiem 61:
PE
FC
PE
FC
130B
B924
.11
PE PE
69696868
12
Ilustracja 2.17
2.4.5.5 Funkcje zacisków sterowania
Funkcje Przetwornica częstotliwości są sterowane zapomocą otrzymywanych przez nią sygnałów wejściowychsterowania.
• Każdy zacisk należy zaprogramować do pełnieniafunkcji związanej z parametrem tego terminala.Tabela 2.5 przedstawia zaciski i powiązane z nimiparametry.
• Należy bezwzględnie upewnić się, że terminalemają zaprogramowane właściwe funkcje.Szczegóły dotyczące dostępu do poszczególnychparametrów - patrz 4 Interfejs użytkownika;informacje o programowaniu - patrz 5 O progra-mowaniu przetwornic częstotliwości.
• Domyślny program zacisków służy do pracyprzetwornica częstotliwości w typowych trybachdziałania.
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 17
2 2
2.4.5.6 Zaciski zwierane 12 i 27
przetwornica częstotliwości pracujące z programowaniemfabrycznym mogą wymagać założenia przewodu zwiera-jącego na zaciskach 12 (lub 13) i 27.
• Zacisk wejścia cyfrowego 27 służy do odbiorupolecenia zewnętrznej blokady sygnałemnapięciowym 24 V DC. W przypadku wieluaplikacji użytkownik podłącza do zacisku 27zewnętrzne urządzenie blokujące
• Jeżeli blokada nie jest podłączona, należy zewrzećzacisk sterowania 12 (zalecany) lub 13 z zaciskiem27. Zapewnia to wewnętrzny sygnał 24 V nazacisku 27
• Brak sygnału na zacisku uniemożliwia pracęurządzenia
• Jeżeli linia statusu na dole ekranu LCP wyświetlaAUTOMATYCZNY ZDALNY WYBIEG SILNIKA,oznacza to, że urządzenie jest gotowe do pracy,ale nie otrzymuje sygnału przez zacisk 27.
• Jeżeli do zacisku 27 podłączono fabrycznieurządzenia opcjonalnie, nie należy odpinać ichokablowania
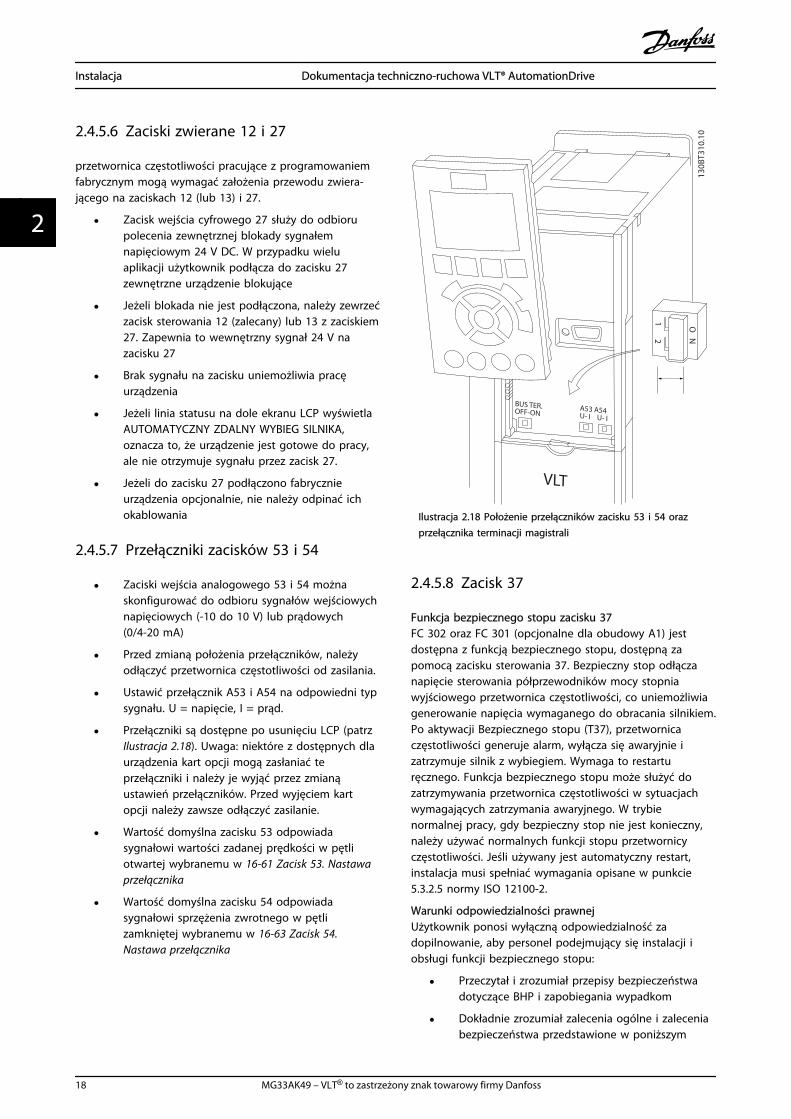
2.4.5.7 Przełączniki zacisków 53 i 54
• Zaciski wejścia analogowego 53 i 54 możnaskonfigurować do odbioru sygnałów wejściowychnapięciowych (-10 do 10 V) lub prądowych(0/4-20 mA)
• Przed zmianą położenia przełączników, należyodłączyć przetwornica częstotliwości od zasilania.
• Ustawić przełącznik A53 i A54 na odpowiedni typsygnału. U = napięcie, I = prąd.
• Przełączniki są dostępne po usunięciu LCP (patrzIlustracja 2.18). Uwaga: niektóre z dostępnych dlaurządzenia kart opcji mogą zasłaniać teprzełączniki i należy je wyjąć przez zmianąustawień przełączników. Przed wyjęciem kartopcji należy zawsze odłączyć zasilanie.
• Wartość domyślna zacisku 53 odpowiadasygnałowi wartości zadanej prędkości w pętliotwartej wybranemu w 16-61 Zacisk 53. Nastawaprzełącznika
• Wartość domyślna zacisku 54 odpowiadasygnałowi sprzężenia zwrotnego w pętlizamkniętej wybranemu w 16-63 Zacisk 54.Nastawa przełącznika
130B
T310
.10
12 N
O
VLT
BUS TER.OFF-ON
A53 A54U- I U- I
Ilustracja 2.18 Położenie przełączników zacisku 53 i 54 orazprzełącznika terminacji magistrali
2.4.5.8 Zacisk 37
Funkcja bezpiecznego stopu zacisku 37FC 302 oraz FC 301 (opcjonalne dla obudowy A1) jestdostępna z funkcją bezpiecznego stopu, dostępną zapomocą zacisku sterowania 37. Bezpieczny stop odłączanapięcie sterowania półprzewodników mocy stopniawyjściowego przetwornica częstotliwości, co uniemożliwiagenerowanie napięcia wymaganego do obracania silnikiem.Po aktywacji Bezpiecznego stopu (T37), przetwornicaczęstotliwości generuje alarm, wyłącza się awaryjnie izatrzymuje silnik z wybiegiem. Wymaga to restarturęcznego. Funkcja bezpiecznego stopu może służyć dozatrzymywania przetwornica częstotliwości w sytuacjachwymagających zatrzymania awaryjnego. W trybienormalnej pracy, gdy bezpieczny stop nie jest konieczny,należy używać normalnych funkcji stopu przetwornicyczęstotliwości. Jeśli używany jest automatyczny restart,instalacja musi spełniać wymagania opisane w punkcie5.3.2.5 normy ISO 12100-2.
Warunki odpowiedzialności prawnejUżytkownik ponosi wyłączną odpowiedzialność zadopilnowanie, aby personel podejmujący się instalacji iobsługi funkcji bezpiecznego stopu:
• Przeczytał i zrozumiał przepisy bezpieczeństwadotyczące BHP i zapobiegania wypadkom
• Dokładnie zrozumiał zalecenia ogólne i zaleceniabezpieczeństwa przedstawione w poniższym
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
18 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
22

opisie i opisie uzupełniającym, który znajduje sięw Zaleceniach Projektowych
• Posiadł wyczerpującą wiedzę z zakresu normogólnych i norm bezpieczeństwa dotyczącychdanej aplikacji
Terminem "użytkownik" określa się: personel integrujący,operatorów, obsługi technicznej i utrzymania ruchu/konser-wacyjny.
NormyUżywanie funkcji bezpiecznego stopu za pomocą zacisku37 wymaga spełnienia przez użytkownika wszystkichwymagań dotyczących bezpieczeństwa, opisanych wstosownych przepisach prawnych i zaleceniachtechnicznych. Funkcja opcjonalnego bezpiecznego stopuspełnia poniższe normy:
EN 954-1: 1996 Kategoria 3
IEC 60204-1: 2005 Kategoria 0 - Niekontrolowanezatrzymanie
IEC 61508: 1998 SIL 2
IEC 61800-5-2: 2007 - Funkcja wyłączeniabezpiecznego momentu obrotowego (STO)
IEC 62061: 2005 SIL CL2
ISO 13849-1: 2006 Kategoria 3 PL d
ISO 14118: 2000 (EN 1037) - Zapobieganieprzypadkowemu rozruchowi
Informacje i instrukcje zawarte w DokumentacjiTechniczno-Ruchowej nie gwarantują prawidłowego ibezpiecznego korzystania z funkcji Bezpiecznego stopu. Wzwiązku z tym należy przestrzegać stosownych informacji iinstrukcji właściwych Zaleceń Projektowych.
Środki bezpieczeństwa
• Instalację i rozruch systemów bezpieczeństwowolno powierzyć wyłącznie wykwalifikowanym iprzeszkolonym pracownikom
• Urządzenie musi być zainstalowane w szafie ostopniu ochrony IP 54 lub w równoważnymśrodowisku
• Kabel pomiędzy zaciskiem 37 a zewnętrznymurządzeniem bezpieczeństwa musi spełniaćwymogi dotyczące ochrony przeciwzwarciowejprzedstawione w normie ISO 13849-2, tabela D.4
• Jeżeli na oś wału silnika oddziałują zewnętrznesiły (np. podwieszone obciążenie), należyzastosować dodatkowe środki bezpieczeństwa(np. hamulec bezpieczeństwa) w celu zażegnaniapotencjalnych zagrożeń
Instalacja i konfiguracja bezpiecznego stopu
OSTRZEŻENIEFUNKCJA BEZPIECZNY STOP!Funkcja bezpiecznego stopu NIE odłącza napięcia zasilaniaod przetwornica częstotliwości ani obwodówpomocniczych. Przed przystąpieniem do pracy na podzes-połach elektrycznych przetwornica częstotliwości lub silnikanależy bezwzględnie odłączyć napięcie zasilania i odczekaćokres czasu przedstawiony w części dot. bezpieczeństwa,znajdującej się w tym podręczniku. Nieprzestrzeganienakazu odcięcia napięcia zasilania od urządzenia iodczekania nakazanego czasu może doprowadzić dośmierci lub poważnych obrażeń.
• Nie zaleca się zatrzymywania przetwornicaczęstotliwości za pomocą funkcji wyłączeniabezpiecznego momentu obrotowego. Jeżeliprzetwornica częstotliwości zostanie zatrzymanaza pomocą tej funkcji, wykona ona zatrzymanieawaryjne z wybiegiem silnika. Jeżeli jestniedopuszczalne, ponieważ np. stwarza jakieśzagrożenie, przetwornica częstotliwości iurządzenia należy zatrzymywać w normalnymtrybie przed użyciem tej funkcji. W zależności odrodzaju aplikacji, może być konieczne użyciehamulca mechanicznego.
• Przetwornice częstotliwości z silnikami synchro-nicznymi i na magnes trwały - awaria wielupółprzewodników mocy IGBT: Pomimo włączeniafunkcji wyłączenia bezpiecznego momentuobrotowego, układ przetwornica częstotliwościmoże generować moment obrotowy zestrajający,który obraca wał silnika o maksymalnie 180/pstopni. p oznacza liczbę par biegunów.
• Funkcja ta nadaje się do prowadzenia pracmechanicznych na układzie przetwornicaczęstotliwości lub wyłącznie na uszkodzonejczęści maszyny. Nie zapewnia ona warunkówbezpiecznych pod kątem elektryczności. Nienależy używać tej funkcji do sterowaniarozruchem i/lub zatrzymaniem przetwornicaczęstotliwości.
Bezpieczna instalacja przetwornica częstotliwości wymagaspełnienia poniższych wymagań:
1. Usunąć przewód zwierający spomiędzy zaciskusterowania 37 i 12 lub 13. Odcięcie lubprzerwanie zworki nie jest wystarczającymśrodkiem zapobiegającym zwarciom. (Patrzzworka na Ilustracja 2.19.)
2. Podłączyć zewnętrzny przekaźnik zabezpieczającymonitorujący poprzez funkcję zabezpieczającą NO(należy przestrzegać instrukcji dla tego urządzeniazabezpieczającego) do zacisku 37 (bezpiecznego
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 19
2 2

stopu) oraz zacisku 12 lub 13 (24 V DC).Przekaźnik zabezpieczający monitorujący musispełniać wymagania Kategorii 3 (EN 954-1)/PL "d"(ISO 13849-1).
12/13 37
130B
A87
4.10
Ilustracja 2.19 Zworka między zaciskiem 12/13 (24 V) i 37.
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
20 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
22

1
2 3
4
5
6
7
8
9
10
11
M
12
37
130B
B749
.10
Ilustracja 2.20 Instalacja ma osiągnąć kategorię zatrzymania 0 (EN 60204-1) wraz z kategorią bezpieczeństwa 3 (EN 954-1) / PL “d” (ISO13849-1).
1 Urządzenie bezpieczeństwa kat. 3 (urządzenieprzerwania obwodu, z ew. wejściem zwolnienia)
7 Inwerter
2 Kontakt drzwiowy 8 Silnik
3 Stycznik (wybieg silnika) 9 5V DC
4 Przetwornica częstotliwości 10 Bezpieczny kanał
5 Zasilanie 11 Kabel zabezpieczony przed zwarciem (jeśli poza szafą montażową)
6 Płyta sterująca
Tabela 2.6
Test bezpiecznego stopu przy oddawaniu do eksploatacjiPo instalacji, a przed pierwszym uruchomieniem należy przeprowadzić test instalacji przed oddaniem do eksploatacji,używając bezpiecznego stopu. Dodatkowo należy przeprowadzać test po każdej modyfikacji takiej instalacji.
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 21
2 2

2.4.5.9 Sterowanie hamulcemmechanicznym
Przy podnoszeniu/opuszczaniu wymagana jest możliwośćsterowania hamulcem elektromechanicznym:
• Sterowanie hamulcem odbywa się za pomocądowolnego wyjścia przekaźnikowego lubcyfrowego (zaciski 27 lub 29).
• Jeśli przetwornica częstotliwości nie może'obsłużyć' silnika, na przykład z powodu zbytdużego obciążenia, należy zamknąć wyjście (beznapięcia).
• W zastosowaniach wykorzystujących hamulecelektromechaniczny należy wybrać Sterowaniehamulcem mechanicznym [32] w grupie par. 5–4*.
• Hamulec zostaje zwolniony, kiedy prąd silnikaprzekracza wartość zaprogramowaną w 2-20 Prądzwalniania hamulca.
• Hamulec jest załączony, kiedy częstotliwośćwyjściowa jest mniejsza od częstotliwościustawionej w 2-21 Prędkość do załącz. hamulca[obr/min] lub 2-22 Prędkość do załącz. hamulca[Hz] pod warunkiem, że przetwornicaczęstotliwości wykonuje polecenie stop.
Jeśli przetwornica częstotliwości znajduje się w trybiealarmowym lub wystąpiło przepięcie, hamulecmechaniczny natychmiast załącza się.
W ruchu pionowym kluczową kwestią jest podtrzymanie,zatrzymanie, kontrolowanie (zwiększanie i zmniejszanie)obciążenia w sposób absolutnie bezpieczny w czasie pracy.przetwornica częstotliwości nie jest urządzeniem zabezpie-czającym, dlatego też konstruktor dźwigu/dźwignika (OEM)musi określić liczbę i typ urządzeń zabezpieczających (np.wyłącznika prędkości, hamulców awaryjnych itp.) służącychdo zatrzymania obciążenia w przypadku zagrożenia lubawarii systemu - zgodnie z krajowymi przepisamitechnicznymi o urządzeniach dźwigowych.
L1 L2 L3
U V W
02 01
A1
A2
130B
A90
2.10
DriveOutput
relay
Command Circuit220Vac
MechanicalBrake
ShaftMotor
Frewheelingdiode
Brake380Vac
OutputContactorInput
Power Circuit
Ilustracja 2.21 Połączenie hamulca mechanicznego doPrzetwornica częstotliwości
2.4.6 Komunikacja szeregowa
Podłączyć przewód komunikacji szeregowej RS-485 dozacisków (+)68 i (-)69.
• Zaleca się użycie ekranowanego kablakomunikacji szeregowej
• Poprawne uziemienie przedstawiono w2.4.2 Wymogi względem uziemienia
61
68
69
+
130B
B489
.10
RS-485
Ilustracja 2.22 Schemat połączeń elektrycznych komunikacjiszeregowej
Aby skonfigurować podstawową konfigurację szeregową,wybrać poniższe parametry
1. Typ protokołu w 8-30 Protokół.
2. Adres przetwornicy częstotliwości w 8-31 Adresmagistrali.
3. Szybkość transmisji w 8-32 Szybkość transmisji.
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
22 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
22

• przetwornica częstotliwości ma dwa wewnętrzneprotokoły komunikacji. Należy przestrzegaćwymagań producenta dotyczących okablowaniasilnika.
Danfoss FC
Modbus RTU
• Funkcje można zaprogramować zdalnie zapomocą oprogramowania parametrów ipołączenia RS-485 lub w grupie parametrów 8-**Komunikacja i opcje
• Wybór danego protokołu komunikacji zmieniaróżne domyślne ustawienia parametrów celemdopasowania ich do specyfikacji protokołu, atakże udostępnienia dodatkowych, odpowiada-jących mu parametrów.
• Karty opcji instalowane w przetwornicy częstot-liwości umożliwiają skorzystanie z dodatkowychprotokołów komunikacji. Instrukcje instalacji iużytkowania kart znajdują się w ich dokumentacji
Instalacja Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 23
2 2
3 Rozruch i próba działania
3.1 Rozruch wstępny
3.1.1 Kontrola bezpieczeństwa
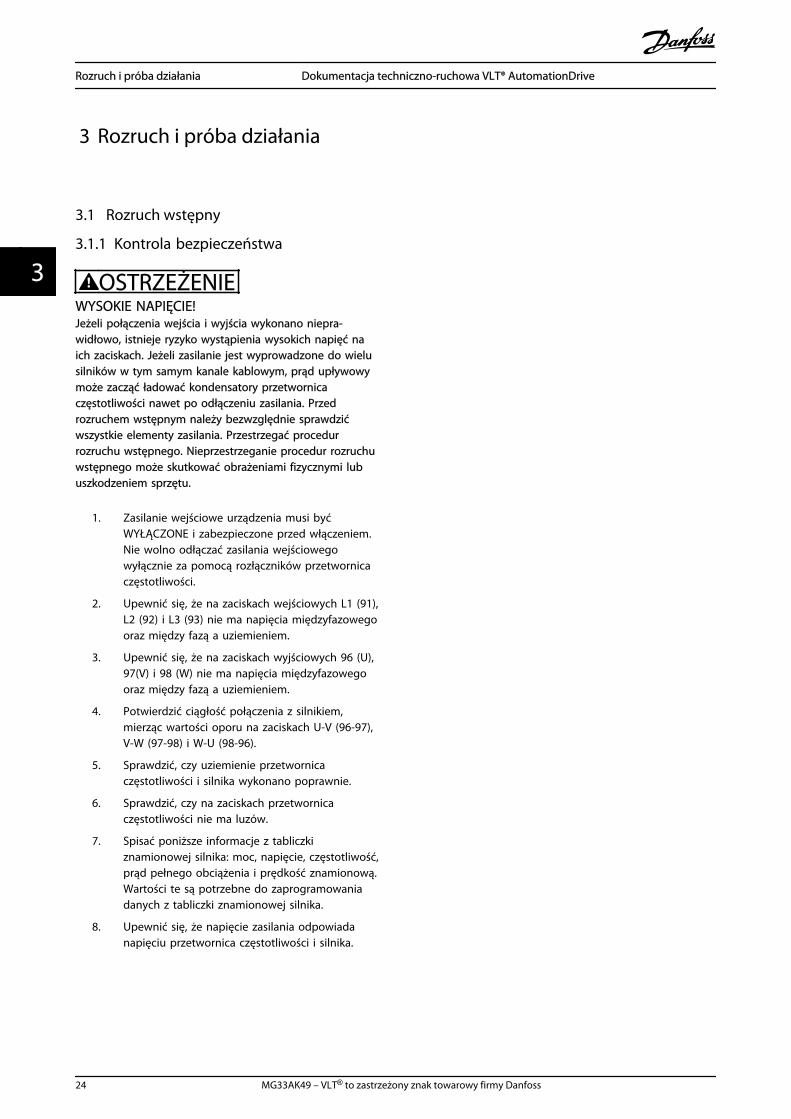
OSTRZEŻENIEWYSOKIE NAPIĘCIE!Jeżeli połączenia wejścia i wyjścia wykonano niepra-widłowo, istnieje ryzyko wystąpienia wysokich napięć naich zaciskach. Jeżeli zasilanie jest wyprowadzone do wielusilników w tym samym kanale kablowym, prąd upływowymoże zacząć ładować kondensatory przetwornicaczęstotliwości nawet po odłączeniu zasilania. Przedrozruchem wstępnym należy bezwzględnie sprawdzićwszystkie elementy zasilania. Przestrzegać procedurrozruchu wstępnego. Nieprzestrzeganie procedur rozruchuwstępnego może skutkować obrażeniami fizycznymi lubuszkodzeniem sprzętu.
1. Zasilanie wejściowe urządzenia musi byćWYŁĄCZONE i zabezpieczone przed włączeniem.Nie wolno odłączać zasilania wejściowegowyłącznie za pomocą rozłączników przetwornicaczęstotliwości.
2. Upewnić się, że na zaciskach wejściowych L1 (91),L2 (92) i L3 (93) nie ma napięcia międzyfazowegooraz między fazą a uziemieniem.
3. Upewnić się, że na zaciskach wyjściowych 96 (U),97(V) i 98 (W) nie ma napięcia międzyfazowegooraz między fazą a uziemieniem.
4. Potwierdzić ciągłość połączenia z silnikiem,mierząc wartości oporu na zaciskach U-V (96-97),V-W (97-98) i W-U (98-96).
5. Sprawdzić, czy uziemienie przetwornicaczęstotliwości i silnika wykonano poprawnie.
6. Sprawdzić, czy na zaciskach przetwornicaczęstotliwości nie ma luzów.
7. Spisać poniższe informacje z tabliczkiznamionowej silnika: moc, napięcie, częstotliwość,prąd pełnego obciążenia i prędkość znamionową.Wartości te są potrzebne do zaprogramowaniadanych z tabliczki znamionowej silnika.
8. Upewnić się, że napięcie zasilania odpowiadanapięciu przetwornica częstotliwości i silnika.
Rozruch i próba działania Dokumentacja techniczno-ruchowa VLT® AutomationDrive
24 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
33

3.1.2 Wykaz czynności kontrolnychrozruchowych
UWAGAPrzed włączeniem zasilania urządzenia należy sprawdzić całą instalację w sposób opisany w Tabela 3.1. Po zakończeniukontroli należy zaznaczyć odpowiednie pozycje.
Punkty kontrolne Opis Urządzenia wspomagające • Sprawdzić urządzenia wspomagające, przełączniki, rozłączniki lub bezpieczniki
wejściowe/wyłączniki różnicowe na wejściu zasilania przetwornica częstotliwościlub jej wyjściu do silnika. Należy sprawdzić gotowość do pracy tych urządzeń, atakże ich zdolność do pracy z pełną prędkością.
• Sprawdzić działanie i montaż czujników przekazujących sprzężenie zwrotne doprzetwornica częstotliwości
• Usunąć z silnika ograniczniki korekcji współczynnika mocy (jeżeli takie zainsta-lowano).
Prowadzenie przewodów • Upewnić się, że okablowanie zasilania wejściowego, kable silnika i okablowaniesterowania poprowadzono w trzech osobnych metalowych kanałach lubkorytach celem odizolowania szumu na wysokich częstotliwościach.
Okablowanie sterowania • Sprawdzić, czy przewody nie są uszkodzone i czy połączenia nie zostałypoluzowane
• Upewnić się, czy okablowanie sterowania jest odizolowane od kabli silnika izasilania w celu zapewnienia niewrażliwości na szumy
• W razie potrzeby sprawdzić, czy źródło napięcia sygnałów jest właściwe
• Zaleca się kabel ekranowany lub skręcanej pary przewodów. Sprawdzić, czyekran jest odpowiednio zakończony.
Prześwit obiegu chłodzenia • Zmierzyć prześwit w górnej i dolnej części w celu sprawdzenia, czy zapewniaon odpowiedni obieg powietrza chłodzenia
Kompatybilność elektromagne-tyczna (EMC)
• Sprawdzić, czy instalacja spełnia wymagania kompatybilności elektromagne-tycznej
Środowisko • Sprawdzić zakres temperatury roboczej otoczenia z zapisem na tabliczceurządzenia
• Wilgotność musi zawierać się w zakresie 5-95% bez skraplania
Bezpieczniki i wyłącznikiróżnicowe
• Sprawdzić, czy zastosowano właściwe bezpieczniki i wyłączniki
• Upewnić się, czy bezpieczniki są solidnie zainstalowane i czy nadają się dopracy, a także czy wszystkie wyłączniki różnicowe są w położeniu otwartym
Uziemienie • Urządzenie musi być uziemione dedykowanym przewodem uziomowym,biegnącym od obudowy do instalacji uziemienia budynku
• Sprawdzić, czy połączenia uziomowe są właściwe, dobrze zamknięte inieutlenione
• Kanały kablowe ani mocowania tylnego panela do powierzchni metalowych niesą właściwym sposobem uziemienia
Przewody zasilania wejściowegoi wyjściowego
• Sprawdzić, czy połączenia nie są obluzowane
• Upewnić się że kable silnika i zasilania poprowadzono oddzielnymi kanałamikablowymi lub wykonano kablami ekranowanymi
Wnętrze panelu • Sprawdzić, czy wnętrze filtra jest zabrudzone lub zanieczyszczone metalowymiwiórami, wilgocią lub korozją
Rozruch i próba działania Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 25
3 3

Punkty kontrolne Opis Przełączniki • Upewnić się, czy wszystkie przełączniki i rozłączniki znajdują się we właściwym
położeniu
Drgania • Sprawdzić, czy panel przytwierdzono na stałe lub użyto mocowań przeciwuda-rowych
• Sprawdzić, czy urządzenie nie jest narażone na nadmierne drgania
Tabela 3.1 Wykaz czynności kontrolnych rozruchowych
3.2 Podłączanie zasilania do przetwornicy częstotliwości
OSTRZEŻENIEWYSOKIE NAPIĘCIE!Po podłączeniu zasilania AC w przetwornicy częstotliwościwystępuje wysokie napięcie. Instalacja, rozruch ikonserwacja powinny być wykonywane wyłącznie przezwykwalifikowany personel. Prowadzenie instalacji, rozruchui konserwacji przez inne osoby grozi śmiercią lubpoważnymi obrażeniami.
OSTRZEŻENIEPRZYPADKOWY ROZRUCH!Jeżeli przetwornica częstotliwości jest podłączona dozasilania AC, silnik może zostać uruchomiony w każdejchwili. przetwornica częstotliwości, silnik oraz pozostałeurządzenia zasilające muszą być w stanie gotowości dopracy. Brak gotowości urządzeń do pracy w czasiepodłączenia przetwornica częstotliwości do zasilania ACmoże doprowadzić do śmierci, poważnych obrażeń lubuszkodzenia mienia.
1. Sprawdzić, czy asymetria napięcia wejściowegomieści się w zakresie 3%. W przeciwnym wypadkunależy skorygować napięcie wejściowe przedwykonaniem kolejnych czynności. Powtórzyćprocedurę po korekcji napięcia.
2. Upewnić się, że okablowanie urządzeńopcjonalnych odpowiada aplikacji instalacji.
3. Upewnić się, że wszystkie urządzenia operatoraznajdują się w położeniu WYŁ. Drzwi panelimuszą być zamknięte lub osłona zainstalowana.
4. Włączyć zasilanie urządzenia. NIE WŁĄCZAĆ samejprzetwornica częstotliwości. W przypadkuurządzeń wyposażonych w rozłącznik, należyprzesunąć go do położenia WŁ., aby włączyćzasilanie dla przetwornica częstotliwości.
WAŻNEJeżeli linia statusu na dole ekranu LCP wyświetla AUTOMA-TYCZNY ZDALNY WYBIEG SILNIKA lub Alarm 60 Blokadazewnętrzna, oznacza to, że urządzenie jest gotowe dopracy, ale nie otrzymuje sygnału przez zacisk 27.Szczegółowe informacje znajdują się w Ilustracja 2.19.
3.3 Podstawowe proceduryprogramowania pracy
Przetwornice częstotliwości wymagają zaprogramowaniapodstawowych parametrów pracy przed ich urucho-mieniem - pozwala to uzyskać najwyższą ich wydajność.Podstawowe zaprogramowanie pracy wymaga wprowa-dzenia danych z tabliczki znamionowej obsługiwanegosilnika, a także minimalnych i maksymalnych wartościprędkości obrotowej silnika. Wprowadzić dane zgodnie zponiższą procedurą. Zalecane ustawienia parametrów służądo rozruchu i testów kontrolnych. Ustawienia aplikacjimogą być inne od przedstawionych. Instrukcja wprowa-dzania danych w LCP znajduje się w 4 Interfejs użytkownika.
Dane należy wprowadzić po włączeniu zasilania, ale przedrozpoczęciem pracy przez przetwornicę.
1. Dwukrotnie nacisnąć przycisk [Main Menu] naLCP.
2. Przyciskami nawigacyjnymi przejść do grupyparametrów 0** Praca/Wyświetlacz, a następnienacisnąć [OK].
130B
P066
.10
1107 obr./min
0- ** Praca/Wyświetlacz
1- ** Obciążenie/Silnik
2- ** Hamulce
3- ** Wartość zadana/Czas rozpędzenia/zatrzymania
3,84 A 1 (1)
Menu główne
Ilustracja 3.1
Rozruch i próba działania Dokumentacja techniczno-ruchowa VLT® AutomationDrive
26 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
33

3. Przyciskami nawigacyjnymi przejść do grupyparametrów 0-0* Ustawienia podstawowe inacisnąć [OK].
0-**Operation / Display0.0%
0-0* Basic Settings
0-1* Set-up Opperations
0-2* LCP Display
0-3* LCP Custom Readout
0.00A 1(1)
130B
P087
.10
Ilustracja 3.2
4. Przyciskami nawigacyjnymi przejść do0-03 Ustawienia regionalne, a następnie nacisnąć[OK].
0-0*Basic Settings0.0%
0-03 Regional Settings
[0] International
0.00A 1(1)
130B
P088
.10
Ilustracja 3.3
5. Przyciskami nawigacyjnymi wybrać Międzyna-rodowy lub Ameryka Północna (zgodnie zlokalizacja), a następnie nacisnąć [OK]. (Zmienia toustawienia podstawowe określonej liczbyparametrów podstawowych. Ich wykaz znajdujesię w 5.4 Ustawienia parametrów domyślne dlaregionu Międzynarodowy/Ameryka Północna.)
6. Nacisnąć przycisk [Quick Menu] na LCP.
7. Przyciskami nawigacyjnymi przejść do grupyparametrów Q2 Konfiguracja skrócona, a następnienacisnąć [OK].
130B
B847
.10
Q1 My Personal Menu
Q2 Quick Setup
Q5 Changes Made
Q6 Loggings
13.7% 13.0A 1(1)
Quick Menus
Ilustracja 3.4
8. Wybrać język i nacisnąć [OK]. Wprowadzić danesilnika w parametrach od 1-20/1-21 do 1-25. Danete znajdują się na tabliczce znamionowej silnika.
1-20 Moc silnika [kW] lub 1-21 Moc silnika[HP]
1-22 Napięcie silnika
1-23 Częstotliwość silnika
1-24 Prąd silnika
1-25 Znamionowa prędkość silnika
130B
T772
.10
Q2
0.0 Hz 0.00kW 1(1)
Motor Setup
1 - 21 Motor Power [kW]
4.0 kW
Ilustracja 3.5
9. Pomiędzy zaciskami sterowania 12 i 27 założyćprzewód zwierający. W takim wypadku należyzostawić 5-12 Zacisk 27 - wej. cyfrowe na wartościfabrycznej. W przeciwnym razie wybrać Brakdziałania. Przetwornice częstotliwości wyposażonew opcjonalne obejście firmy Danfoss niewymagają przewodu zwierającego.
10. 3-02 Minimalna wartość zadana
11. 3-03 Maks. wartość zadana
12. 3-41 Czas rozpędzania 1
13. 3-42 Czas zatrzymania 1
14. 3-13 Pochodzenie wart. Zadanej. Powiązany zHand/Auto* Lokalny Zdalny
Procedura konfiguracji skróconej jest zakończona. Nacisnąć[Status], aby wrócić do ekranu pracy.
3.4 Automatyczne dopasowanie silnika
Automatyczne dopasowanie silnika (AMA) jest procedurątestową, która mierzy elektryczne parametry silnika celemzoptymalizowania jego kompatybilności z przetwornicaczęstotliwości.
• przetwornica częstotliwości tworzy matematycznymodel silnika, służący do sterowania wyjściowymprądem silnika. Procedura sprawdza równowagęfaz wejścia zasilania i porównuje parametry silnikaz danymi wprowadzonymi za pomocąparametrów od 1–20 do 1–25..
• Nie powoduje to rozruchu silnika ani jegouszkodzenia
• Niektóre typy silników nie mogą przejść pełnejwersji testu. W takim przypadku wybrać Aktywneograniczone AMA
Rozruch i próba działania Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 27
3 3

• Jeżeli do silnika podłączono filtr wyjścia, wybraćAktywne ograniczone AMA
• Jeżeli pojawią się ostrzeżenia lub alarmy, patrz8 Ostrzeżenia i alarmy
• Najlepsze wyniki uzyskuje się przeprowadzającpowyższą procedurę na zimnym silniku
Aby uruchomić AMA (automatyczne dopasowanie silnika)1. Nacisnąć [Main Menu], aby wejść do parametrów.
2. Przejść do grupy parametrów 1-** Obciążenie isilnik.
3. Nacisnąć przycisk [OK].
4. Przejść do grupy parametrów 1-2* Dane silnika.
5. Nacisnąć przycisk [OK].
6. Przejść do 1-29 Auto. dopasowanie do silnika(AMA).
7. Nacisnąć przycisk [OK].
8. Wybrać Aktywne pełne AMA.
9. Nacisnąć przycisk [OK].
10. Postępować zgodnie z instrukcjami na ekranie
11. Test wykona się automatycznie, ze wskazaniemjego ukończenia.
3.5 Sprawdzenie obrotów silnika
Przed uruchomieniem przetwornicy częstotliwości należysprawdzić kierunek obrotów silnika.
1. Nacisnąć [Hands on].
2. Nacisnąć [], aby wybrać dodatnią wartośćzadaną prędkości.
3. Sprawdzić, czy wyświetlana wartość prędkościjest dodatnia.
Jeżeli 1-06 Clockwise Direction ustawiono na [0]* Normalny(zgodny z ruchem wskazówek zegara):
4a. Sprawdzić, czy wał silnika obraca się wkierunku zgodnym z ruchem wskazówek zegara.
5a. Sprawdzić, czy strzałka na LCP wskazujekierunek zgodny z ruchem wskazówek zegara.
Jeżeli 1-06 Clockwise Direction ustawiono na [1] Odwrotny(przeciwny do ruchu wskazówek zegara):
4b. Sprawdzić, czy wał silnika obraca się wkierunku przeciwnym do ruchu wskazówekzegara.
5b. Sprawdzić, czy strzałka na LCP wskazujekierunek przeciwny do ruchu wskazówek zegara.
3.6 Sprawdzenie obrotów enkodera
Obroty enkodera należy sprawdzać jeżeli użyto funkcjisprzężenia zwrotnego z enkodera. Sprawdzić obrotyenkodera w fabrycznie ustawionym trybie sterowania wotwartej pętli.
1. Sprawdzić, czy połączenia enkodera wykonanozgodnie ze schematem połączeń:
Ilustracja 3.6
WAŻNEW przypadku korzystania z opcji enkodera, należy odnieśćsię do podręcznika opcji
2. Wprowadzić źródło sprzężenia zwrotnego PIDprędkości w 7-00 Prędkość PID źródło sprzężenia
3. Nacisnąć [Hand On]
4. Nacisnąć [], aby wybrać dodatnią wartośćzadaną prędkości (1-06 Clockwise Direction na [0]*Normalny).
5. Upewnić się w 16-57 Feedback [RPM], żesprzężenie zwrotne jest dodatnie
WAŻNEJeżeli sprzężenie zwrotne jest ujemne, enkoder podłączononiewłaściwie!
Rozruch i próba działania Dokumentacja techniczno-ruchowa VLT® AutomationDrive
28 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
33

3.7 Test sterowania lokalnego
UWAGAROZRUCH SILNIKA!Upewnić się, że silnik, system i wszystkie podłączoneurządzenia są gotowe do rozruchu. Użytkownik odpowiadaza zapewnienie bezpieczeństwa eksploatacji w każdychwarunkach pracy. Niedopilnowanie czy silnik, system iwszystkie podłączone urządzenia są gotowe do rozruchumoże skutkować obrażeniami lub uszkodzeniem urządzeń.
WAŻNEPrzycisk Hand On na LCP umożliwia wysłanie poleceniastartu lokalnego do przetwornica częstotliwości. PrzyciskOFF pełni funkcję zatrzymania.Podczas pracy w trybie lokalnym strzałki W GÓRĘ i W DÓŁna LCP odpowiednio zwiększają i zmniejszają sygnałwyjściowy sterowania prędkością przetwornicaczęstotliwości. Za pomocą przycisków W PRAWO i W LEWOmożna przesuwać kursor na wyświetlaczu numerycznym.
1. Nacisnąć [Hand Zał.].
2. Przyśpieszyć przetwornica częstotliwości dopełnej prędkości, naciskając []. Przesunięciekursora na lewo od punktu dziesiętnegoumożliwia szybszą zmianę wprowadzanychdanych.
3. Sprawdzić, czy występują problemy z przyspie-szaniem.
4. Nacisnąć klawisz [OFF].
5. Sprawdzić, czy występują problemy zezwalnianiem.
Jeżeli pojawiły się problemy z przyspieszeniem
• Jeżeli pojawią się ostrzeżenia lub alarmy, patrz8 Ostrzeżenia i alarmy
• Należy sprawdzić, czy prawidłowo wprowadzonodane silnika
• Zwiększyć czas rozpędzania w 3-41 Czasrozpędzania 1
• Zwiększyć ograniczenie prądu w 4-18 Ogr. prądu
• Zwiększyć ograniczenie momentu w 4-16 Ograniczmomentu w trybie silnikow.
Jeżeli pojawiły się problemy ze zwalnianiem
• Jeżeli pojawią się ostrzeżenia lub alarmy, patrz8 Ostrzeżenia i alarmy
• Należy sprawdzić, czy prawidłowo wprowadzonodane silnika.
• Zwiększyć czas zatrzymania w 3-42 Czaszatrzymania 1
• Włączyć kontrolę przepięcia w 2-17 Kontrolaprzepięć
Resetowanie przetwornica częstotliwości po wyłączeniuawaryjnym opisano w 8.4 Ostrzeżenie i alarm.
WAŻNEPunkty od 3.1 Rozruch wstępny do 3.7 Test sterowanialokalnego niniejszego rozdziału kończą proceduręwłączenia zasilania przetwornica częstotliwości, progra-mowania podstawowego, konfiguracji i próby działania.
3.8 Rozruch systemu
Procedura przedstawiona w niniejszym punkcie wymagawykonania okablowania i programowania aplikacji. W tymcelu należy odnieść się do 6 Przykłady konfiguracjizastosowań. Pozostałe materiały pomagające w konfiguracjiaplikacji przedstawiono w 1.2 Materiały dodatkowe.Wykonanie poniższej procedury zaleca się po konfiguracjiaplikacji przez użytkownika.
UWAGAROZRUCH SILNIKA!Upewnić się, że silnik, system i wszystkie podłączoneurządzenia są gotowe do rozruchu. Użytkownik odpowiadaza zapewnienie bezpieczeństwa eksploatacji w każdychwarunkach pracy. Niedopilnowanie czy silnik, system iwszystkie podłączone urządzenia są gotowe do rozruchumoże skutkować obrażeniami lub uszkodzeniem urządzeń.
1. Nacisnąć [Auto Zał.].
2. Upewnić się, że zewnętrzne funkcje sterowaniazostały właściwie podłączone do przetwornicaczęstotliwości oraz że zakończono progra-mowanie.
3. Wprowadzić zewnętrzne polecenie wykonania.
4. Nastawić wartość zadaną prędkości w zakresieprędkości.
5. Usunąć zewnętrzne polecenie wykonania.
6. Sprawdzić, czy wystąpiły jakiekolwiek problemy.
Jeżeli pojawią się ostrzeżenia lub alarmy, patrz8 Ostrzeżenia i alarmy.
Rozruch i próba działania Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 29
3 3

4 Interfejs użytkownika
4.1 Lokalny panel sterowania
Lokalny panel sterowania (LCP) składa się z wyświetlacza iklawiatury umieszczonych z przodu urządzenia. LCP jestinterfejsem użytkownika przetwornicy częstotliwości.
LCP ma kilka funkcji użytkownika.
• Uruchomienie, zatrzymanie i regulacja prędkościza pomocą sterowania lokalnego
• Wyświetlanie danych roboczych, statusu,ostrzeżeń i powiadomień
• Programowanie funkcji przetwornicy częstot-liwości
• Zresetuj ręcznie aktywny filtr po błędzie, gdyauto-reset nie jest aktywny
Opcjonalnym urządzeniem jest LCP (NLCP). NLCP pracuje wsposób podobny do LCP. Instrukcja użytkowania NLCPznajduje się w Przewodniku programowania.
WAŻNEAby wyregulować kontrast wyświetlacza należyprzytrzymać wciśnięty przycisk [STATUS] i użyć strzałekgóra lub dół.
4.1.1 Układ LCP
Układ LCP jest podzielony na cztery grupy funkcyjne (patrzIlustracja 4.1).
Autoon Reset
Handon Off
StatusQuickMenu
MainMenu
AlarmLog
Back
Cancel
InfoOK
Status 1(1)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
130B
B465
.10
a
b
c
d
Ilustracja 4.1 LCP
a. Obszar wyświetlacza.
b. Przyciski menu wyświetlacza, służące do zmianywyświetlanych danych, przeglądania opcji statusui historii komunikatów o błędach oraz progra-mowania.
c. Przyciski nawigacyjne, służące do programowania,przesuwania kursora i kontroli prędkości podczaspracy lokalnej. Znajdują się tu również lampkiwskaźników statusu.
d. Przyciski trybu pracy i przycisk reset.
Interfejs użytkownika Dokumentacja techniczno-ruchowa VLT® AutomationDrive
30 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
44

4.1.2 Konfiguracja wartości wyświetlaczaLCP
Obszar wyświetlacza jest włączany, gdy przetwornicaczęstotliwości pobiera moc z napięcia zasilania, zaciskumagistrali DC lub z zasilania zewnętrznego 24 V.
Informacje wyświetlane na LCP można dostosować podwzględem aplikacji użytkownika.
• Każdy element odczytu wskazań wyświetlacza jestpowiązany z określonym parametrem.
• Opcje można wybrać w menu głównym 0-2*
• Status przetwornicy częstotliwości w dolnej linijcewyświetlacza jest generowany automatycznie inie można wybierać jego elementów.Szczegółowe informacje znajdują się w7 Komunikaty na temat statusu.
Wyświetlacz Numer parametru Ustawienie domyślne
1,1 0-20 Prędkość [obr./min.]
1,2 0-21 Prąd silnika
1,3 0-22 Moc [kW]
2 0-23 Częstotliwość
3 0-24 Wartość zadana [%]
Tabela 4.1
1.1
2
3 1.3
1.2
130B
P041
.10
799 obr./min
Auto zdalne rozpędzanie/zatrzymanie
1 (1)36,4 kW7,83 A
0,000
53,2 %
Status
Ilustracja 4.2
1.1
1.2
2
1.3
130B
P062
.10
207 obr./min
Auto zdalne uruchomienie
1 (1)
24,4 kW5,25 A
6,9 Hz
Status
Ilustracja 4.3
4.1.3 Przyciski menu wyświetlacza
Przyciski menu umożliwiają dostęp do menu konfiguracjiparametrów, przeglądanie trybów wyświetlania statusupodczas normalnej pracy oraz podgląd danych dziennikabłędów.
130B
P045
.10
Status QuickMenu
MainMenu
AlarmLog
Ilustracja 4.4
Przycisk FunkcjaStatus Nacisnąć, aby obejrzeć informacje o pracy.
• Naciskając przycisk [Status] w trybie Auto,można przechodzić między wyświetlaczamiodczytu statusu.
• Każdorazowe naciśnięcie przewija ekran donastępnego statusu.
• Nacisnąć i przytrzymać jednocześnie [Status]
oraz [] lub [] aby wyregulować jasność
wyświetlacza
• Symbol w prawym górnym roguwyświetlacza przedstawia kierunek obrotówsilnika oraz wskazuje, która z konfiguracji.Ten element nie jest programowalny.
Szybkie menu Daje dostęp do wszystkich parametrów progra-mowania potrzebnych do instrukcji konfiguracjiwstępnej oraz wiele szczegółowych instrukcjiaplikacji.
• Przejść do Q2 Konfiguracja skróc. gdzieznajdują się szczegółowe instrukcje progra-mowania konfiguracji podstawowejsterownika częstotliwości
• Zachować kolejność parametrów zgodnie zprzedstawioną w zestawie parametrówfunkcji
Menu główne Umożliwia dostęp do wszystkich parametrówprogramowania.
• Nacisnąć dwukrotnie, aby przejść do indeksunajwyższego poziomu
• Nacisnąć jednokrotnie, aby wrócić doostatnio otwartej lokacji
• Nacisnąć i przytrzymać, aby wprowadzićnumer parametru celem bezpośredniegodostępu do tego parametru
Interfejs użytkownika Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 31
4 4

Przycisk FunkcjaRejestralarmów
Wyświetla listę aktualnych ostrzeżeń, 10ostatnich alarmów oraz dziennik konserwacji.
• Aby uzyskać informacje o przetwornicyczęstotliwości przed jej przejściem w trybalarmu, należy wybrać numer alarmu zapomocą przycisków nawigacyjnych inacisnąć [OK].
Tabela 4.2
4.1.4 Przyciski nawigacyjne
Przyciski nawigacyjne służą do programowania funkcji iprzesuwania kursora. Przyciski nawigacyjne służą także dosterowania prędkością podczas pracy w trybie lokalnym(ręcznym). Przy nich znajdują się również trzy lampkiwskaźników statusu przetwornica częstotliwości.
130B
T117
.10
OK
Back
Info
Warm
Alarm
On
Cancel
Ilustracja 4.5
Przycisk Funkcja
Wstecz Służy do przechodzenia do poprzedniego krokulub listy w strukturze menu.
Anuluj Służy do anulowania ostatniej zmiany lubpolecenia dopóki zawartość ekranu nie ulegniezmianie.
Info Jego naciśnięcie wywołuje definicję wyświetlanejfunkcji.
Przyciskinawigacyjne
Cztery strzałki nawigacyjne pozwalają poruszać siępo elementach menu.
OK Służy do uzyskania dostępu do grup parametrówlub zatwierdzenia wyboru.
Tabela 4.3
Lampka Wskaźnik Funkcja
Zielona ZAŁ. Lampka ZAŁ. włącza się, kiedyprzetwornica częstotliwościpobiera moc z napięcia zasilania,zacisku magistrali DC lub zzasilania zewnętrznego 24 V.
Żółta WARN Jeżeli wystąpią warunkipowodujące wywołanieostrzeżenia, zapali się żółta lampkaWARN, zaś na wyświetlaczu pojawisię informacja tekstowa na tematproblemu.
Czerwona ALARM W przypadku usterki czerwonalampka alarmu zaczyna pulsować,zaś urządzenie wyświetlainformację tekstową o alarmie.
Tabela 4.4
4.1.5 Przyciski funkcyjne
Przyciski funkcyjne znajdują się u dołu LCP.
130B
P046
.10
Handon O Auto
on Reset
Ilustracja 4.6
Przycisk Funkcja
Hand On Nacisnąć, aby uruchomić przetwornicaczęstotliwości w trybie sterowania lokalnego.
• przetwornica częstotliwości można zmienićprzyciskami nawigacyjnymi.
• Zewnętrzny sygnał zatrzymania, otrzymany nawejściu sterowania lub przez magistralękomunikacji szeregowej, unieważnia tryblokalny ręczny on
Wyłączone Zatrzymuje silnik, ale nie odłącza przetwornicaczęstotliwości od zasilania.
Auto On Przełącza system w tryb pracy zdalnej.
• Reaguje na zewnętrzne polecenie startuprzesłane przez zaciski sterowania lubmagistralę komunikacji szeregowej
• Wartość zadana prędkości pochodzi zzewnętrznego źródła
Reset Resetuje przetwornica częstotliwości po zatwier-dzeniu alarmu.
Tabela 4.5
Interfejs użytkownika Dokumentacja techniczno-ruchowa VLT® AutomationDrive
32 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
44
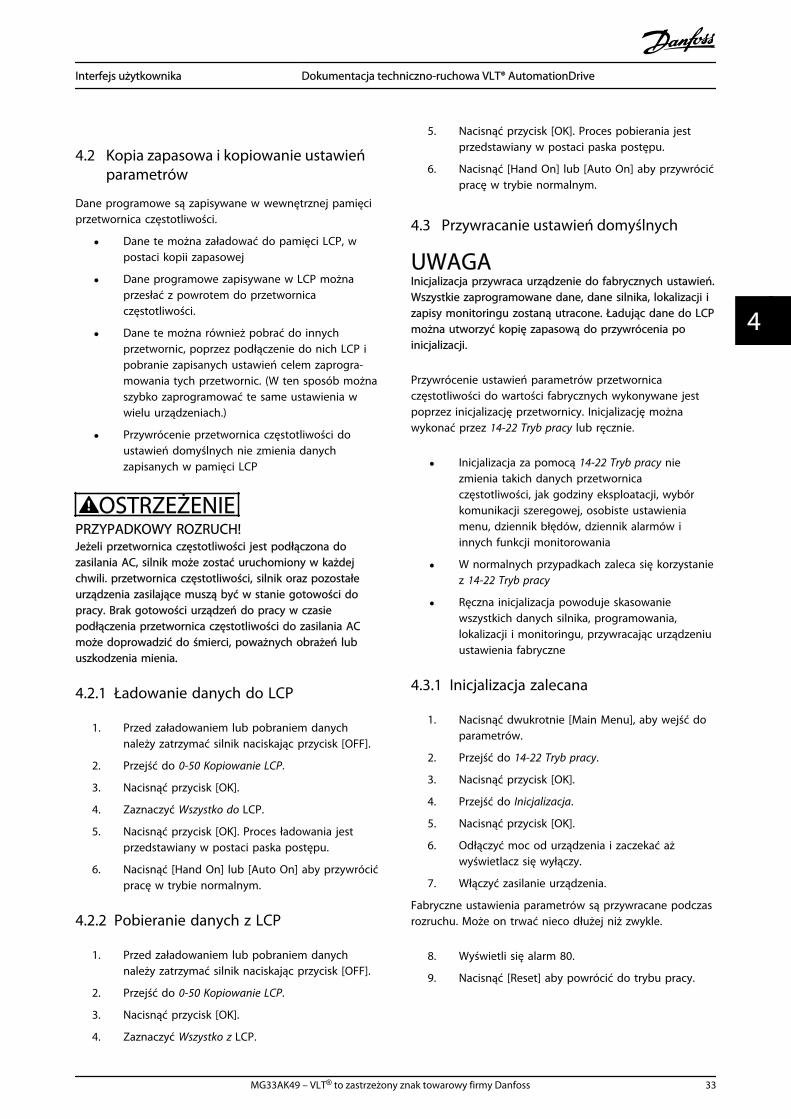
4.2 Kopia zapasowa i kopiowanie ustawieńparametrów
Dane programowe są zapisywane w wewnętrznej pamięciprzetwornica częstotliwości.
• Dane te można załadować do pamięci LCP, wpostaci kopii zapasowej
• Dane programowe zapisywane w LCP możnaprzesłać z powrotem do przetwornicaczęstotliwości.
• Dane te można również pobrać do innychprzetwornic, poprzez podłączenie do nich LCP ipobranie zapisanych ustawień celem zaprogra-mowania tych przetwornic. (W ten sposób możnaszybko zaprogramować te same ustawienia wwielu urządzeniach.)
• Przywrócenie przetwornica częstotliwości doustawień domyślnych nie zmienia danychzapisanych w pamięci LCP
OSTRZEŻENIEPRZYPADKOWY ROZRUCH!Jeżeli przetwornica częstotliwości jest podłączona dozasilania AC, silnik może zostać uruchomiony w każdejchwili. przetwornica częstotliwości, silnik oraz pozostałeurządzenia zasilające muszą być w stanie gotowości dopracy. Brak gotowości urządzeń do pracy w czasiepodłączenia przetwornica częstotliwości do zasilania ACmoże doprowadzić do śmierci, poważnych obrażeń lubuszkodzenia mienia.
4.2.1 Ładowanie danych do LCP
1. Przed załadowaniem lub pobraniem danychnależy zatrzymać silnik naciskając przycisk [OFF].
2. Przejść do 0-50 Kopiowanie LCP.
3. Nacisnąć przycisk [OK].
4. Zaznaczyć Wszystko do LCP.
5. Nacisnąć przycisk [OK]. Proces ładowania jestprzedstawiany w postaci paska postępu.
6. Nacisnąć [Hand On] lub [Auto On] aby przywrócićpracę w trybie normalnym.
4.2.2 Pobieranie danych z LCP
1. Przed załadowaniem lub pobraniem danychnależy zatrzymać silnik naciskając przycisk [OFF].
2. Przejść do 0-50 Kopiowanie LCP.
3. Nacisnąć przycisk [OK].
4. Zaznaczyć Wszystko z LCP.
5. Nacisnąć przycisk [OK]. Proces pobierania jestprzedstawiany w postaci paska postępu.
6. Nacisnąć [Hand On] lub [Auto On] aby przywrócićpracę w trybie normalnym.
4.3 Przywracanie ustawień domyślnych
UWAGAInicjalizacja przywraca urządzenie do fabrycznych ustawień.Wszystkie zaprogramowane dane, dane silnika, lokalizacji izapisy monitoringu zostaną utracone. Ładując dane do LCPmożna utworzyć kopię zapasową do przywrócenia poinicjalizacji.
Przywrócenie ustawień parametrów przetwornicaczęstotliwości do wartości fabrycznych wykonywane jestpoprzez inicjalizację przetwornicy. Inicjalizację możnawykonać przez 14-22 Tryb pracy lub ręcznie.
• Inicjalizacja za pomocą 14-22 Tryb pracy niezmienia takich danych przetwornicaczęstotliwości, jak godziny eksploatacji, wybórkomunikacji szeregowej, osobiste ustawieniamenu, dziennik błędów, dziennik alarmów iinnych funkcji monitorowania
• W normalnych przypadkach zaleca się korzystaniez 14-22 Tryb pracy
• Ręczna inicjalizacja powoduje skasowaniewszystkich danych silnika, programowania,lokalizacji i monitoringu, przywracając urządzeniuustawienia fabryczne
4.3.1 Inicjalizacja zalecana
1. Nacisnąć dwukrotnie [Main Menu], aby wejść doparametrów.
2. Przejść do 14-22 Tryb pracy.
3. Nacisnąć przycisk [OK].
4. Przejść do Inicjalizacja.
5. Nacisnąć przycisk [OK].
6. Odłączyć moc od urządzenia i zaczekać ażwyświetlacz się wyłączy.
7. Włączyć zasilanie urządzenia.
Fabryczne ustawienia parametrów są przywracane podczasrozruchu. Może on trwać nieco dłużej niż zwykle.
8. Wyświetli się alarm 80.
9. Nacisnąć [Reset] aby powrócić do trybu pracy.
Interfejs użytkownika Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 33
4 4

4.3.2 Ręczna inicjalizacja
1. Odłączyć moc od urządzenia i zaczekać ażwyświetlacz się wyłączy.
2. Nacisnąć i przytrzymać jednocześnie [Status],[Main Menu] i [OK], a następnie włączyć zasilanieurządzenia.
Fabryczne ustawienia parametrów są przywracane podczasrozruchu. Może on trwać nieco dłużej niż zwykle.
Ręczna inicjalizacja nie resetuje następujących informacjizapisanych w przetwornica częstotliwości
• 15-00 Godziny pracy
• 15-03 Załączenia zasilania
• 15-04 Przekroczenie temp.
• 15-05 Przepięcia w DC
Interfejs użytkownika Dokumentacja techniczno-ruchowa VLT® AutomationDrive
34 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
44
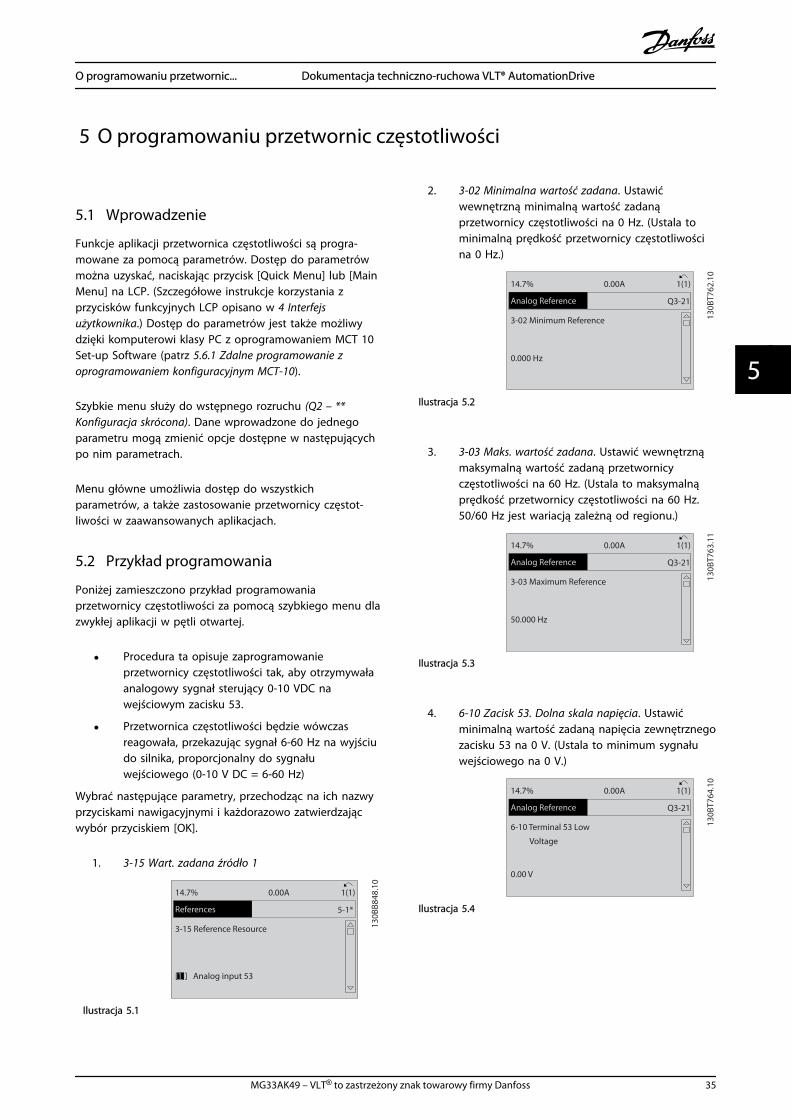
5 O programowaniu przetwornic częstotliwości
5.1 Wprowadzenie
Funkcje aplikacji przetwornica częstotliwości są progra-mowane za pomocą parametrów. Dostęp do parametrówmożna uzyskać, naciskając przycisk [Quick Menu] lub [MainMenu] na LCP. (Szczegółowe instrukcje korzystania zprzycisków funkcyjnych LCP opisano w 4 Interfejsużytkownika.) Dostęp do parametrów jest także możliwydzięki komputerowi klasy PC z oprogramowaniem MCT 10Set-up Software (patrz 5.6.1 Zdalne programowanie zoprogramowaniem konfiguracyjnym MCT-10).
Szybkie menu służy do wstępnego rozruchu (Q2 – **Konfiguracja skrócona). Dane wprowadzone do jednegoparametru mogą zmienić opcje dostępne w następującychpo nim parametrach.
Menu główne umożliwia dostęp do wszystkichparametrów, a także zastosowanie przetwornicy częstot-liwości w zaawansowanych aplikacjach.
5.2 Przykład programowania
Poniżej zamieszczono przykład programowaniaprzetwornicy częstotliwości za pomocą szybkiego menu dlazwykłej aplikacji w pętli otwartej.
• Procedura ta opisuje zaprogramowanieprzetwornicy częstotliwości tak, aby otrzymywałaanalogowy sygnał sterujący 0-10 VDC nawejściowym zacisku 53.
• Przetwornica częstotliwości będzie wówczasreagowała, przekazując sygnał 6-60 Hz na wyjściudo silnika, proporcjonalny do sygnałuwejściowego (0-10 V DC = 6-60 Hz)
Wybrać następujące parametry, przechodząc na ich nazwyprzyciskami nawigacyjnymi i każdorazowo zatwierdzającwybór przyciskiem [OK].
1. 3-15 Wart. zadana źródło 1
5-1*
130B
B848
.10
3-15 Reference Resource
[1]] Analog input 53
14.7% 0.00A 1(1)
References
Ilustracja 5.1
2. 3-02 Minimalna wartość zadana. Ustawićwewnętrzną minimalną wartość zadanąprzetwornicy częstotliwości na 0 Hz. (Ustala tominimalną prędkość przetwornicy częstotliwościna 0 Hz.)
Q3-21
130B
T762
.10
3-02 Minimum Reference
0.000 Hz
14.7% 0.00A 1(1)
Analog Reference
Ilustracja 5.2
3. 3-03 Maks. wartość zadana. Ustawić wewnętrznąmaksymalną wartość zadaną przetwornicyczęstotliwości na 60 Hz. (Ustala to maksymalnąprędkość przetwornicy częstotliwości na 60 Hz.50/60 Hz jest wariacją zależną od regionu.)
Q3-21
130B
T763
.11
3-03 Maximum Reference
50.000 Hz
14.7% 0.00A 1(1)
Analog Reference
Ilustracja 5.3
4. 6-10 Zacisk 53. Dolna skala napięcia. Ustawićminimalną wartość zadaną napięcia zewnętrznegozacisku 53 na 0 V. (Ustala to minimum sygnałuwejściowego na 0 V.)
Q3-21
130B
T764
.10
6-10 Terminal 53 Low
Voltage
0.00 V
14.7% 0.00A 1(1)
Analog Reference
Ilustracja 5.4
O programowaniu przetwornic... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 35
5 5

5. 6-11 Zacisk 53. Górna skala napięcia. Ustawićzewnętrzną maksymalną wartość zadaną napięciana zacisku 53 na 10 V. (Ustala to maksimumsygnału wejściowego na 10 V.)
Q3-21
130B
T765
.10
6-11 Terminal 53 High
Voltage
10.00 V
14.7% 0.00A 1(1)
Analog Reference
Ilustracja 5.5
6. 6-14 Zacisk 53. Dolna skala zad./sprz. zwr.. Ustawićminimalną wartość zadaną prędkości na zacisku53 na 6 Hz. [Dla przetwornicy częstotliwościbędzie to oznaczało, że minimalne napięcieotrzymane na zacisku 53 (0 V) jest równe 6 Hz nawyjściu.]
130B
T773
.11
Q3-21
14.7 % 0.00 A 1(1)
Analog Reference
6 - 14 Terminal 53 Low Ref./Feedb. Value
000020.000
Ilustracja 5.6
7. 6-15 Zacisk 53. Górna skala zad./sprz. zwr.. Ustawićmaksymalną wartość zadaną prędkości na zacisku53 na 60 Hz. [Dla przetwornicy częstotliwościbędzie to oznaczało, że maksymalne napięcieotrzymane na zacisku 53 (10 V) jest równe 60 Hzna wyjściu.]
130B
T774
.11
Q3-21
14.7 % 0.00 A 1(1)
Analog Reference
6 - 15 Terminal 53 High Ref./Feedb. Value
50.000
Ilustracja 5.7
System jest gotowy do pracy po podłączeniu urządzeniazewnętrznego przekazującego sygnał sterujący 0-10 V dozacisku 53 przetwornicy częstotliwości. Pasek przewijaniapo prawej stronie wyświetlacza na ostatniej ilustracjiznajduje się na samym dole, co oznacza zakończenieprocedury.
Ilustracja 5.8 przedstawia połączenia elektryczne umożli-wiające tę konfigurację.
53
55
6-1* +
A53
U - I
130B
B482
.10
0-10V
Ilustracja 5.8 Przykład połączeń elektrycznych dla urządzeniazewnętrznego dostarczającego sygnał sterujący 0-10 V(przetwornica częstotliwości po lewej, urządzenie zewnętrzne poprawej)
5.3 Przykłady programowania zaciskusterowania
Zaciski sterowania są programowalne.
• Każdy zacisk może wykonywać ściśle określonefunkcje
• Parametry powiązane z każdym zaciskiem służądo włączania tych funkcji
• przetwornica częstotliwości będzie pracowałaprawidłowo, pod warunkiem że zaciskisterowania:
Są prawidłowo podłączone doprzewodów
Zaprogramowane do wykonywaniaprawidłowych funkcji
Otrzymują sygnały
Numer parametru zacisku sterowania i jego domyślneustawienie znajduje się w Tabela 2.5 (Ustawienia domyślne/fabryczne można zmienić za pomocą 0-03 Ustawieniaregionalne.)
O programowaniu przetwornic... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
36 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
55

Poniższy przykład ilustruje dostęp do zacisku 18 celemsprawdzenia jego ustawienia fabrycznego.
1. Dwukrotnie nacisnąć [Main Menu], przewinąć dogrupa parametrów 5-** Wej/Wyj cyfrowe Zestawdanych parametrów i nacisnąć [OK].
130B
T768
.10
2-** Brakes
3-** Reference / Ramps
4-** Limits / Warnings
5-** Digital In/Out
14.6% 0.00A 1(1)
Main Menu
Ilustracja 5.9
2. Przejść do grupy parametrów 5-1* Wejścia cyfrowei nacisnąć [OK].
130B
T769
.10
5-0* Digital I/O mode
5-1* Digital Inputs
5-4* Relays
5-5* Pulse Input
14.7% 0.00A 1(1)
Digital In/Out 5-**
Ilustracja 5.10
3. Przejść do 5-10 Zacisk 18 - wej. cyfrowe. Nacisnąć[OK], aby przejść do wyboru funkcji. Wyświetli sięustawienie domyślne Start.
5-1*
130B
T770
.10
5-10 Terminal 18 Digital
Input
[8]] Start
14.7% 0.00A 1(1)
Digital Inputs
Ilustracja 5.11
5.4 Ustawienia parametrów domyślne dlaregionu Międzynarodowy/AmerykaPółnocna
Ustawienie 0-03 Ustawienia regionalne na [0] Międzyna-rodowy lub [1] Ameryka Północna powoduje zmianęustawień domyślnych niektórych parametrów. Tabela 5.1przedstawia wykaz parametrów zmienianych w ten sposób.
Parametr Fabryczna wartośćparametru dla
Międzynarodowy
Fabryczna wartośćparametru dla
Ameryka Północna0-03 Ustawieniaregionalne
Międzynarodowy Ameryka Północna
1-20 Moc silnika[kW]
Patrz Uwaga nr 1 Patrz Uwaga nr 1
1-21 Moc silnika[HP]
Patrz Uwaga nr 2 Patrz Uwaga nr 2
1-22 Napięciesilnika
230V/400V/575V 208V/460V/575V
1-23 Częstotliwośćsilnika
50 Hz 60 Hz
3-03 Maks. wartośćzadana
50 Hz 60 Hz
3-04 Funkcjawartości zadanej
Suma Zewnętrzna/progra-mowana
4-13 Ogranicz wys.prędk. silnika [obr/min]Patrz uwagi 3 i 5
1500RPM 1800RPM
4-14 Ogranicz wys.prędk. silnika [Hz]Patrz Uwaga 4
50 Hz 60 Hz
4-19 Maks. częstot-liwość wyjś.
132 Hz 120 Hz
4-53 Ostrzeżenie odużej prędkości
1500RPM 1800RPM
5-12 Zacisk 27 -wej. cyfrowe
Wybieg silnika,odwr. Blokada zewnętrzna
5-40 Przekaźnik,funkcja
Brak działania Brak alarmu
6-15 Zacisk 53.Górna skala zad./sprz. zwr.
50 60
6-50 Zacisk 42.Wyjście
Brak działania Pręd.4-20 mA
14-20 Trybresetowania
Reset ręczny Niesk. il.aut. resetów
Tabela 5.1 Ustawienia parametrów domyślne dla regionuMiędzynarodowy/Ameryka Północna
Uwaga 1: 1-20 Moc silnika [kW] widoczne tylko, gdy 0-03 Ustawieniaregionalne jest ustawione na [0] Międzynarodowy.Uwaga 2 1-21 Moc silnika [HP]widoczne tylko, gdy 0-03 Ustawieniaregionalne jest ustawione na [1] Ameryka Północna.Uwaga 3 Parametr ten jest widoczny tylko, gdy 0-02 Jednostkaprędkości silnika jest ustawiony na [0] obr/min.Uwaga 4 Parametr ten jest widoczny tylko, gdy 0-02 Jednostkaprędkości silnika jest ustawiony na [1] Hz.Uwaga 5: Wartość domyślna zależy od liczby biegunów silnika.Międzynarodowa wartość domyślna wynosi 1500 obr./min. dlasilników 4-biegunowych i 3000 obr./min. dla silników 2-biegunowych.Dla Ameryki Północnej wartości te wynoszą odpowiednio 1800 obr./min. i 3600 obr./min.
O programowaniu przetwornic... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 37
5 5

Zmiany ustawień domyślnych/fabrycznych są zapisywane wpamięci i można je przejrzeć z poziomu szybkiego menu,wraz z programami wpisanymi w parametry.
1. Nacisnąć przycisk [Quick Menu].
2. Przejść do Q5 Dokonane zmiany i nacisnąć [OK].
130B
B849
.10
Q1 My Personal Menu
Q2 Quick Setup
Q5 Changes Made
Q6 Loggings
25.9% 0.00A 1(1)
Quick Menus
Ilustracja 5.12
3. Wybrać Q5-2 Od nastaw fabrycznych, abywyświetlić wszystkie zmiany programów, lub Q5-110 ostatnich zmian, aby wyświetlić najnowszezmiany.
Q5
130B
B850
.10
Q5-1 Last 10 Changes
Q5-2 Since Factory Setti...
25.9% 0.00A 1(1)
Changes Made
Ilustracja 5.13
5.5 Struktura menu parametrów
Prawidłowe programowanie pod aplikacje często wymagaustawienia funkcji w kilku powiązanych parametrach.Ustawienia parametru dostarczają przetwornicaczęstotliwości informacji o systemie, dzięki którymprzetwornica częstotliwości pracuje w poprawny sposób.Informacje o systemie mogą zawierać takie dane, jak typysygnałów wyjściowych i wejściowych, programowaniezacisków, minimalne i maksymalne wartości sygnałów,komunikaty własne, automatyczny restart i inne cechy.
• Na wyświetlaczu LCP można przejrzećszczegółowe opcje programowania parametrów iustawień.
• Naciśnięcie przycisku [Info] w dowolnym miejscuw menu wywołuje dodatkowe informacje natemat danej funkcji.
• Naciśnięcie i przytrzymanie [Main Menu] pozwalawprowadzić numer parametru i tym samymuzyskać bezpośredni dostęp do niego.
• Szczegółowe informacje na temat powszechnychkonfiguracji aplikacji znajdują się w 6 Przykładykonfiguracji zastosowań.
O programowaniu przetwornic... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
38 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
55

5.5.
1St
rukt
ura
głów
nego
men
u
0-**
Prac
a/W
yśw
ietla
cz0-
0*U
staw
ieni
a po
dst.
0-01
Języ
k0-
02Je
dnos
tka
pręd
kośc
i siln
ika
0-03
Ust
awie
nia
regi
onal
ne0-
04St
an p
racy
prz
y za
ł. za
sila
nia
(Han
d)0-
09M
onito
r sp
raw
nośc
i0-
1*D
ział
ania
kon
fig.
0-10
Akt
ywny
zes
taw
par
0-11
Setu
p e
dyto
wan
y0-
12Te
n z
esta
w p
aram
etró
w p
ołąc
z.0-
13Po
le o
dczy
tu: P
ołąc
zone
zes
t.pa
ram
etró
w0-
14Po
le o
dczy
tu: E
dyto
wan
y ze
staw
par
./Ka
nał
0-15
Pole
odc
zytu
: fak
tycz
na k
onfig
urac
ja0-
2*W
yśw
ietla
cz L
CP0-
20Po
zycj
a 1.
1 w
yśw
ietla
cza
0-21
Pozy
cja
1.2
wyś
wie
tlacz
a0-
22Po
zycj
a 1.
3 w
yśw
ietla
cza
0-23
Dru
ga li
nia
wyś
wie
tlacz
a0-
24Tr
zeci
a lin
ia w
yśw
ietla
cza
0-25
Moj
e m
enu
oso
bist
e0-
3*O
dczy
t de
f.uży
t.LCP
0-30
Jedn
. do
odc
zytu
def
. prz
ez u
żytk
.0-
31W
arto
ść m
in. o
dczy
tu o
kr. p
rzez
0-32
War
tość
mak
s. o
dczy
tu o
kr. p
rzez
0-37
Teks
t na
wyś
wie
tlacz
u 1
0-38
Teks
t na
wyś
wie
tlacz
u 2
0-39
Teks
t na
wyś
wie
tlacz
u 3
0-4*
Klaw
iatu
ra L
CP0-
40Pr
zyci
sk [H
and
on]
na
LCP
0-41
Przy
cisk
[Off]
na
LCP
0-42
Przy
cisk
[Aut
o o
n] n
a LC
P0-
43Pr
zyci
sk [R
eset
] na
LCP
0-44
Przy
cisk
[Off/
Rese
t] n
a LC
P0-
45Pr
zyci
sk [D
rive
Bypa
ss]
na L
CP0-
5*Ko
piuj
/Zap
isz
0-50
Kopi
owan
ie L
CP0-
51Ko
piow
anie
par
amet
rów
0-6*
Has
ło0-
60H
asło
dla
Głó
wne
go M
enu
0-61
Dos
tęp
do
Głó
wne
go M
enu
bez
has
ła0-
65H
asło
Szy
bkie
go M
enu
0-66
Dos
tęp
do
Szy
bkie
go M
enu
bez
has
ła0-
67H
asło
dos
tępu
do
mag
istr
.1-
**O
bcią
żeni
e i s
ilnik
1-0*
Ust
awie
nia
ogól
ne1-
00Tr
yb k
onfig
urac
yjny
1-01
Alg
oryt
m s
tero
wan
ia s
ilnik
iem
1-02
Źród
ło s
przę
ż.zw
r. d
la a
lg. F
lux
1-03
Char
akte
ryst
yka
mom
entu
1-04
Tryb
prz
ecią
żeni
a1-
05Ko
nfig
urac
ja t
rybu
loka
lneg
o1-
06Zg
odni
e z
ruch
em w
skaz
ówek
zeg
ara
1-1*
Wyb
ór s
ilnik
a1-
10Bu
dow
a si
lnik
a1-
2*da
ne s
ilnik
a1-
20M
oc s
ilnik
a [k
W]
1-21
Moc
siln
ika
[KM
]1-
22N
apię
cie
siln
ika
1-23
Częs
totli
woś
ć si
lnik
a1-
24Pr
ąd s
ilnik
a1-
25Zn
amio
now
a pr
ędko
ść s
ilnik
a1-
26St
er. s
ilnik
iem
mom
ent
nom
inal
ny1-
29A
uto.
dop
asow
anie
siln
ika
(AM
A)
1-3*
zaaw
. dan
e si
lnik
a1-
30Re
zyst
ancj
a st
ojan
a (R
s)1-
31Re
zyst
ancj
a w
irnik
a (R
r)1-
33Re
akta
ncja
roz
pros
z. s
toja
na (X
1)1-
34Re
akta
ncja
roz
pros
z. w
irnik
a (X
2)1-
35Re
akta
ncja
głó
wna
(Xh)
1-36
Rezy
stan
cja
stra
t w
żel
azie
(Rfe
)1-
37In
dukc
yjno
ść (L
d) w
osi
d1-
39Bi
egun
y si
lnik
a1-
40Si
ła e
lekt
rom
ot.p
rzy
1000
obr
./min
.1-
41W
yrów
nany
kąt
siln
ika
1-5*
Nas
t ni
ez o
d o
bc1-
50St
rum
ień
prz
y ze
row
ej p
rędk
.1-
51M
in p
ręd
prz
y no
rm s
trum
mag
[obr
./m
in.]
1-52
Min
prę
d p
rzy
norm
str
um m
ag [H
z]1-
53Pr
óg p
rzeł
ącza
nia
mod
elu
siln
ika
1-54
Ogr
anic
z. n
apię
cia
przy
osł
ab. p
ola
1-55
Char
akte
ryst
yka
U/f
- U
1-56
Char
akte
ryst
yka
U/f
- F
1-58
Prąd
impu
lsów
tes
t.sta
rtu
w lo
cie
1-59
Częs
t.im
puls
ów t
est.s
tart
u w
loci
e1-
6*N
ast
zal o
d o
bc1-
60Ko
mpe
ns. o
bcią
ż. p
rzy
nisk
ich
prę
dk.
1-61
Kom
pens
. obc
iąż.
prz
y w
ys p
rędk
.1-
62Ko
mpe
nsac
ja p
ośliz
gu1-
63St
ała
czas
owa
kom
pens
acji
1-64
Tłum
ieni
e re
zona
nsu
1-65
Stał
a cz
asow
a tłu
mie
nia
rezo
nans
u1-
66Pr
ąd m
in. p
rzy
nisk
iej p
rędk
ości
1-67
Typ
obc
iąże
nia
1-68
Min
imal
ny m
omen
t be
zwła
d.1-
69M
aks.
mom
ent
bezw
ład.
1-7*
Regu
lacj
a st
artu
1-71
Opó
źnie
nie
star
tu1-
72Fu
nkcj
a st
artu
1-73
Star
t w
loci
e1-
74Pr
ędko
ść s
tart
u [o
br/m
in]
1-75
Pręd
kość
sta
rtu
[Hz]
1-76
Prąd
sta
rtow
y1-
8*Re
gula
cja
stop
u1-
80Fu
nkcj
a pr
zy s
topi
e1-
81Pr
ędk.
min
. fun
kcji
przy
Sto
p [o
br/m
in]
1-82
Pręd
k. m
in. f
unkc
ji pr
zy S
top
[Hz]
1-83
Funk
cja
prec
yzyj
nego
1-84
War
t. li
czn.
pre
c.1-
85O
póź.
kom
p.pr
ęd.d
okł.s
topu
1-9*
Tem
p. s
ilnik
a
1-90
Zabe
zp. t
erm
iczn
e si
lnik
a1-
91W
enty
lato
r ze
wn.
siln
ika
1-93
Źród
ło t
erm
isto
r1-
94Zm
niej
szen
ie p
rędk
ości
ogr
.krz
. ATE
XET
R1-
95Ty
p c
zujn
ika
KTY
1-96
Źród
ło t
erm
isto
r KT
Y1-
97W
arto
ść p
rogo
wa
KTY
1-98
Częs
t. p
kt. i
nter
. ATE
X E
TR1-
99Pr
ąd p
kt. i
nter
. ATE
X E
TR2-
**H
amul
ce2-
0*H
amul
ec D
C2-
00Pr
ąd t
rzym
ania
DC
2-01
Prąd
ham
ulca
DC
2-02
Czas
ham
owan
ia D
C2-
03Pr
ęd.d
la z
ałąc
z.ha
mow
.DC[
ob2-
04Pr
ęd.d
la z
ałąc
z.ha
mow
.DC[
Hz
2-05
Mak
sym
alna
war
tość
zad
ana
2-1*
Funk
cje
ener
gii h
amow
ania
2-10
Funk
cja
ham
ulca
2-11
Rezy
stor
ham
ulca
(om
)2-
12Li
mit
moc
y ha
mow
ania
(kW
)2-
13M
onito
row
anie
moc
y ha
mow
ania
2-15
Kont
rola
ham
ulca
2-16
Mak
s. p
rąd
ham
ulca
AC
2-17
Kont
rola
nap
ięci
a w
DC
2-18
War
unek
kon
trol
i ham
ulca
2-19
Wzm
ocni
enie
prz
epię
cia
2-2*
Ham
ulec
mec
hani
czny
2-20
Prąd
zw
alni
ania
ham
ulca
2-21
Pręd
kość
akt
ywac
ji ha
mul
ca [o
br./m
in.]
2-22
Częs
totli
woś
ć ak
tyw
acji
ham
ulca
[Hz]
2-23
Opó
źnie
nie
akty
wac
ji ha
mul
ca2-
24O
póź.
Sto
pu2-
25Cz
as z
wol
nien
ia h
amul
ca2-
26W
art.
zad
ana
mom
entu
2-27
Czas
roz
pędz
./zat
rz.-t
ryb
mom
ento
wy
2-28
Wsp
ółcz
ynni
k zw
ięks
zeni
a w
zmoc
nien
ia3-
**W
arto
ść z
adan
a /
czas
roz
pędz
ania
/za
trzy
man
ia3-
0*O
gran
icz.
war
t.zad
.3-
00Za
kres
war
tośc
i zad
anej
3-01
Jedn
ostk
a w
arto
ści z
adan
ej/s
przę
żeni
azw
rotn
ego
3-02
Min
imal
na w
arto
ść z
adan
a3-
03M
aksy
mal
na w
arto
ść z
adan
a3-
04Fu
nkcj
a w
arto
ści z
adan
ej3-
1*W
arto
ści z
adan
e3-
10Pr
ogra
mow
ana
war
tość
zad
ana
3-11
Pręd
kość
prz
y pr
acy
man
ewro
wej
[Hz]
3-12
Wie
lkoś
ć ko
rekt
y w
arto
ści z
adan
ej3-
13Po
chod
zeni
e w
arto
ści z
adan
ej3-
14Pr
ogra
mow
ana
wzg
l.war
t.zad
.3-
15W
art.
zad
ana
źród
ło 1
3-16
2 źr
ódło
war
tośc
i zad
anej
3-17
War
t. z
adan
a źr
ódło
33-
18Źr
ódło
war
t. z
adan
ej s
kalo
wan
ej w
zgl.
3-19
Pręd
.prz
y pr
acy
man
ew. [
obr/
min
]3-
4*Cz
as r
oz./h
am. 1
3-40
Typ
roz
pędz
enia
/zat
rzym
ania
13-
41Cz
as r
ozpę
dzan
ia 1
3-42
Czas
zat
rzym
ania
13-
45W
spół
cz p
rzys
p 1
S-r
amp
prz
y pr
zys.
Star
t3-
46W
spół
cz p
rzys
p 1
S-r
amp
prz
y pr
zys.
koni
ec3-
47W
spół
cz. z
wal
n. 1
S-r
amp
prz
y op
óź.
Star
t3-
48W
spół
cz. z
wal
n. 1
S-r
amp
prz
y op
óź.
koni
ec3-
5*Cz
as r
oz./h
am. 2
3-50
Typ
2 r
ozpę
dzan
ia/z
atrz
yman
ia3-
51Cz
as r
ozpę
dzan
ia 2
3-52
Czas
zat
rzym
ania
23-
55W
spół
cz p
rzys
p 2
S-r
amp
prz
y pr
zys.
Star
t3-
56W
spół
cz p
rzys
p 2
S-r
amp
prz
y pr
zys.
koni
ec3-
57W
spół
cz. z
wal
n. 2
S-r
amp
prz
y op
óź.
Star
t3-
58W
spół
cz. z
wal
n. 2
S-r
amp
prz
y op
óź.
koni
ec3-
6*Cz
as r
ozp.
/ham
. 33-
60Ty
p 3
roz
pędz
ania
/zat
rzym
ania
3-61
Czas
roz
pędz
ania
33-
62Cz
as z
atrz
yman
ia 3
3-65
Ram
p 3
-wsp
ół.k
szt.S
Sta
rt3-
66Ra
mp
3-w
spół
.ksz
t.S k
onie
c3-
67Ra
mp
3-w
spół
.ksz
t.S S
tart
3-68
Ram
p 3
-wsp
ół.k
szt.S
kon
iec
3-7*
Czas
roz
p./h
am. 4
3-70
Typ
4 r
ozpę
dzan
ia/z
atrz
yman
ia3-
71Cz
as r
ozpę
dzan
ia 4
3-72
Czas
zat
rzym
ania
43-
75Ra
mp
4-w
spół
.ksz
t.S S
tart
3-76
Ram
p 4
-wsp
ół.k
szt.S
kon
iec
3-77
Ram
p 4
-wsp
ół.k
szt.S
Sta
rt3-
78Ra
mp
4-w
spół
.ksz
t.S k
onie
c3-
8*In
ne c
zasy
roz
/zat
3-80
Czas
roz
p./z
atrz
ym. p
racy
impu
lsow
ej3-
81Cz
as r
oz./z
atrz
.dla
szy
b.st
opu
3-82
Typ
roz
pędz
./zat
rz. d
la s
zybk
. sto
pu3-
83Sz
ybki
e za
trz.
wsp
ółcz
. zat
rz. S
prz
yzw
al. S
tart
3-84
Szyb
kie
zatr
z. w
spół
cz. z
atrz
. S p
rzy
zwal
. kon
iec
3-9*
Pote
ncjo
met
r cy
f.3-
90W
ielk
ość
krok
u3-
91Cz
as r
ozpę
dzen
ia/z
atrz
yman
ia3-
92Pr
zyw
róce
nie
zasi
lani
a3-
93O
gran
icze
nie
mak
sym
alne
3-94
Ogr
anic
zeni
e m
inim
alne
3-95
Opó
źnie
nie
rozp
ędza
nia/
zatr
zym
ania
4-**
Ogr
anic
zeni
a /
Ost
rzeż
enia
4-1*
Ogr
anic
zeni
a si
lnik
a4-
10Ki
erun
ek o
brot
ów s
ilnik
a4-
11D
olna
gra
nica
prę
d.si
l.[ob
r/m
in]
4-12
Ogr
anic
zeni
e ni
skie
j prę
dkoś
ci s
ilnik
a[H
z]4-
13G
órna
gra
nica
prę
d.si
l. [o
br/m
in]
4-14
Gór
na g
rani
ca c
zęst
. siln
ika
[Hz]
4-16
Ogr
an.m
om. w
try
bie
siln
ik.
4-17
Ogr
an.m
om. w
try
bie
gene
rat.
4-18
Ogr
anic
zeni
e pr
ądu
4-19
Mak
s. c
zęst
otliw
ość
wyj
ścio
wa
4-2*
Czyn
niki
ogr
anic
zeni
a4-
20M
iejs
ce o
gran
icze
nia
mom
entu
4-21
Źród
ło c
zynn
ika
ogra
nicz
enia
prę
dkoś
ci4-
3*M
on. p
ręd.
siln
ika
4-30
Reak
cja
na u
trat
ę sp
rzęż
enia
zwro
tneg
o4-
31Bł
ąd p
ręd.
sprz
ęż.z
wr.s
ilnik
a4-
32Ti
me-
out
po u
trac
ie s
prz.
zwr.s
il.4-
34Fu
nkcj
a bł
ędu
wys
zuk.
4-35
Błąd
wys
zuki
wan
ia4-
36Li
mit
cza
su b
łędu
wys
zuk.
4-37
Rozp
./zat
rz. b
łędu
wys
zuk.
4-38
Lim
it c
zasu
roz
p./z
atrz
. błę
du w
yszu
k.4-
39Bł
. wys
zuk.
po
lim
. cz.
roz
p./z
atrz
ym.
4-5*
Ost
rzeż
enia
Ost
rzeż
enia
4-50
Ost
rzeż
enie
o m
ałym
prą
dzie
4-51
Ost
rzeż
enie
o d
użym
prą
dzie
4-52
Ost
rzeż
enie
o n
iski
ej p
rędk
ości
4-53
Ost
rzeż
enie
o d
użej
prę
dkoś
ci4-
54O
strz
eżen
ie o
nis
kiej
war
tośc
i zad
anej
4-55
Ost
rzeż
. o w
ysok
iej w
art.
zad
.4-
56O
strz
eż. o
nis
kim
spr
zęż.
zw
r.4-
57O
strz
eżen
ie o
wys
.spr
zęż.
zwr.
4-58
Funk
cja
brak
u fa
zy s
ilnik
a4-
6*Pr
ędko
ści z
abro
nion
e4-
60Pr
ędko
ści z
abro
nion
e od
: [ob
r./m
in]
4-61
Częs
totli
woś
ci z
abro
nion
e od
[Hz]
4-62
Pręd
kośc
i zab
roni
one
do [o
br./m
in.]
4-63
Częs
totli
woś
ci z
abro
nion
e do
[Hz]
5-**
Wej
./Wyj
.cyf
r.5-
0*Tr
yb w
ej/w
yj.c
yf5-
00Tr
yb w
ejść
/wyj
ść c
yfro
wyc
h5-
01Tr
yb z
acis
ku 2
75-
02Tr
yb z
acis
ku 2
95-
1*W
ejśc
ia c
yfro
we
5-10
Zaci
sk 1
8 -
wej
. cyf
row
e5-
11Za
cisk
19
- w
ej. c
yfro
we
5-12
Zaci
sk 2
7 -
wej
. cyf
row
e5-
13Za
cisk
29
- w
ej. c
yfro
we
5-14
Zaci
sk 3
2 -
wej
. cyf
row
e5-
15Za
cisk
33
- w
ej. c
yfro
we
5-16
Zaci
sk X
30/2
wej
ście
cyf
row
e5-
17Za
cisk
X30
/3 w
ejśc
ie c
yfro
we
5-18
Zaci
sk X
30/4
wej
ście
cyf
row
e5-
19Za
cisk
37.
Bez
p. s
top
5-20
Zaci
sk X
46/1
wej
ście
cyf
row
e5-
21Za
cisk
X46
/3 w
ejśc
ie c
yfro
we
5-22
Zaci
sk X
46/5
wej
ście
cyf
row
e5-
23Za
cisk
X46
/7 w
ejśc
ie c
yfro
we
5-24
Zaci
sk X
46/9
wej
ście
cyf
row
e5-
25Za
cisk
X46
/11
wej
ście
cyf
row
e
O programowaniu przetwornic... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 39
5 5

5-26
Zaci
sk X
46/1
3 w
ejśc
ie c
yfro
we
5-3*
Wyj
ścia
cyf
row
e5-
30Za
cisk
27.
Wyj
ście
cyf
row
e5-
31Za
cisk
29.
Wyj
ście
cyf
row
e5-
32W
yj.c
yfr.
zac
isku
X30
/6 (M
CB 1
01)
5-33
Wyj
ście
cyf
row
e za
cisk
u X
30/7
(MCB
101)
5-4*
Prze
kaźn
iki
5-40
Funk
cja
prze
kaźn
ika
5-41
Opó
źnie
nie
załą
czen
ia, p
rzek
aźni
k5-
42O
późn
ieni
e w
yłąc
zeni
a, p
rzek
aźni
k5-
5*W
ejśc
ie im
puls
owe
5-50
Nis
ka c
zęst
otliw
ość
zac.
29
5-51
Wys
oka
częs
totli
woś
ć za
c. 2
95-
52N
iska
.war
t.zad
./spr
zęż.
zwr.
zac
. 29
war
t.5-
53W
ysok
a w
art.z
ad./s
prz.
zwr.
zac
. 29
war
t.5-
54St
ała
czas
owa
filtr
a im
puls
oweg
o n
r 29
5-55
Nis
ka c
zęst
otliw
ość
zac.
33
5-56
Wys
oka
częs
totli
woś
ć za
c. 3
35-
57N
iska
.war
t.zad
./spr
zęż.
zwr.
zac
. 33
war
t.5-
58W
ysok
a w
art.z
ad./s
prz.
zwr.
zac
. 33
war
t.5-
59St
ała
czas
owa
filtr
a im
puls
oweg
o n
r 33
5-6*
Wyj
ście
impu
lsow
e5-
60Zm
ienn
a w
yjśc
ia im
puls
oweg
o z
acis
ku27
5-62
Mak
sym
alna
czę
stot
liwoś
ć w
yjśc
iaim
puls
oweg
o n
r 27
5-63
Zmie
nna
wyj
ścia
impu
lsow
ego
zac
isku
295-
65M
aksy
mal
na c
zęst
otliw
ość
wyj
ścia
impu
lsow
ego
nr
295-
66Zm
ienn
a w
yjśc
ia im
puls
oweg
o z
acis
kuX3
0/6
5-68
Mak
sym
alna
czę
stot
liwoś
ć w
yjśc
iaim
puls
oweg
o n
r X3
0/6
5-7*
Wej
ście
enk
oder
a 24
V5-
70Za
cisk
i 32/
33 o
br/m
in5-
71Za
cisk
i 32/
33. K
ier.o
br.e
nkod
.5-
9*M
agis
t. s
ter.
5-90
Cyfr
owe
i prz
ekaź
niko
we
ster
owan
iem
agis
tral
ą5-
93W
yjśc
ie im
puls
owe
nr 2
7, s
tero
wan
iem
agis
tral
i5-
94W
yjśc
ie im
puls
owe
nr 2
7, z
apro
gra-
mow
any
time-
out
5-95
Wyj
ście
impu
lsow
e nr
29,
ste
row
anie
mag
istr
ali
5-96
Wyj
ście
impu
lsow
e nr
29,
zap
rogr
a-m
owan
y tim
e-ou
t5-
97W
yj. i
mpu
ls. n
r X3
0/6,
ste
r. m
agis
tral
i5-
98W
yjśc
ie im
puls
owe
nr X
30/6
, zap
rogr
a-m
owan
y tim
e-ou
t6-
**W
ejśc
ie/W
yjśc
ie a
nalo
gow
e6-
0*Tr
yb w
e/w
y an
alog
6-00
Czas
tim
e-ou
t fu
nkcj
i liv
e ze
ro6-
01Fu
nkcj
a tim
e-ou
t Li
ve z
ero
6-1*
Wej
ście
ana
log.
1
6-10
Nis
kie
napi
ęcie
zac
isku
53
6-11
Zaci
sk 5
3 gó
rna
skal
a na
pięc
ia6-
12Za
cisk
53.
Dol
na s
kala
nap
ięci
a6-
13D
uży
prąd
zac
isku
53
6-14
Nis
ka w
art.z
ad./s
prz.
zwr.
zac
isku
53
war
t.6-
15W
ysok
a w
art.z
ad./s
prz.
zwr.
zac
isku
53
war
t.6-
16Za
cisk
53.
Sta
ła c
zaso
wa
filtr
a6-
2*W
ejśc
ie a
nalo
g. 2
6-20
Nis
kie
napi
ęcie
zac
isku
54
6-21
Wys
. nap
ięci
e za
cisk
u 5
46-
22Za
cisk
54
Dol
na s
kala
prą
du6-
23Za
cisk
54.
Gór
na s
kala
prą
du6-
24N
iska
war
t.zad
./spr
z.zw
r. z
acis
ku 5
4w
art.
6-25
Wys
oka
war
t.zad
./spr
z.zw
r. z
acis
ku 5
4w
art.
6-26
Zaci
sk 5
4 St
ała
czas
owa
filtr
u6-
3*W
ejśc
ie a
nalo
g. 3
6-30
Zaci
sk X
30/1
1. D
olna
war
tość
nap
ięci
a6-
31Za
cisk
X30
/11.
Gór
na s
kala
nap
ięci
a6-
34Za
cisk
X30
/11.
Dol
na s
kala
war
t.zad
./w
art.s
prz.
zwr.
war
t.6-
35Za
cisk
X30
/11.
Gór
na s
kala
war
t.zad
./w
art.s
prz.
zwr.
war
t.6-
36Za
cisk
X30
/11.
Sta
ła c
zaso
wa
filtr
a6-
4*W
ejśc
ie a
nalo
g. 4
6-40
Zaci
sk X
30/1
2. D
olna
war
tość
nap
ięci
a6-
41Za
cisk
X30
/12.
Gór
na s
kala
nap
ięci
a6-
44Za
cisk
X30
/12.
Dol
na s
kala
war
t.zad
./w
art.s
prz.
zwr.
war
t.6-
45Za
cisk
X30
/12.
Gór
na s
kala
war
t.zad
./w
art.s
prz.
zwr.
war
t.6-
46Za
cisk
X30
/12.
Sta
ła c
zaso
wa
filtr
a6-
5*W
yjśc
ie a
nalo
g. 1
6-50
Wyj
ście
zac
isku
42
6-51
Min
imal
na s
kala
wyj
ścia
zac
isku
42
6-52
Mak
sym
alna
ska
la w
yjśc
ia z
acis
ku 4
26-
53St
er. s
zyny
wyj
zac
42
6-54
Zapr
ogra
mow
any
time-
out
wyj
ścia
zaci
sku
42
6-55
Filtr
wyj
ścia
ana
logo
weg
o6-
6*W
yjśc
ie a
nalo
g. 2
6-60
Wyj
ście
zac
isku
X30
/86-
61Za
cisk
X30
/8. M
in. s
kalo
wan
ie6-
62Za
cisk
X30
/8. M
aks.
ska
low
anie
6-63
Zaci
sk X
30/8
. Ste
row
anie
mag
istr
alą
6-64
Zapr
ogra
mow
any
time-
out
wyj
ścia
zaci
sku
X30
/86-
7*W
yjśc
ie a
nalo
g. 3
6-70
Zaci
sk X
45/1
. Wyj
ście
6-71
Zaci
sk X
45/1
. Min
. ska
low
anie
6-72
Zaci
sk X
45/1
. Mak
s. s
kalo
wan
ie6-
73Za
cisk
X45
/1. S
tero
wan
ie m
agis
tral
ą6-
74Za
cisk
X45
/1. N
asta
wa
lim. c
z. w
yjśc
ia6-
8*W
yjśc
ie a
nalo
g. 4
6-80
Zaci
sk X
45/3
. Wyj
ście
6-81
Zaci
sk X
45/3
. Min
. ska
low
anie
6-82
Zaci
sk X
45/3
. Mak
s. s
kalo
wan
ie6-
83Za
cisk
X45
/3. S
tero
wan
ie m
agis
tral
ą6-
84Za
cisk
X45
/3. N
asta
wa
lim. c
z. w
yjśc
ia7-
**St
erow
niki
7-0*
Reg.
PID
prę
dkoś
ci7-
00Re
gul.P
ID p
ręd.
-źró
dło
spr
zęż.
7-02
Prop
orc.
wzm
oc. P
ID p
ręd.
7-03
Czas
cał
kow
ania
PID
prę
dkoś
ci7-
04St
ała
czas
owa
różn
icz.
PID
prę
d.7-
05W
spół
.róż.
regu
l.PID
ogr
an.w
zmoc
.7-
06St
.cza
s.fil
.dol
nopr
z.re
g.PI
Dpr
ęd.
7-07
Wsp
ół. p
rzeł
oż. s
przę
ż. z
wr.
prę
d. P
ID7-
08Cz
ynni
k po
suw
u d
o p
rzod
u p
ręd.
PID
7-09
Kore
kta
błęd
ów p
ręd.
PID
z p
rzys
p./
zwal
n.7-
1*St
er. P
I mom
entu
7-12
Wzm
oc. p
ropo
rc. r
eg. P
I mom
entu
7-13
Czas
cał
k. r
eg. P
I mom
entu
7-2*
Ster
. pro
c pr
oces
u7-
20Źr
ódło
spr
zęż.
zwr.1
pro
c.CL
7-22
Źród
ło s
przę
ż.zw
r.2 p
roc.
CL7-
3*Re
gul.P
ID p
roce
su7-
30Pr
oces
PID
ste
r.nor
/wzm
7-31
Prze
twar
zani
e PI
D A
nti W
indu
p7-
32Pr
ędko
ść s
tart
owa
PID
pro
cesu
7-33
Wzm
oc. p
ropo
rc. P
ID p
roce
su7-
34Pr
oces
PID
cza
s ca
łkow
ania
7-35
Proc
es P
ID C
zas
różn
iczk
owan
ia7-
36Ró
żnic
zk.P
ID p
roce
su o
gran
.wzm
oc.
7-38
Prze
tw.c
zyn.
posu
wu
do
prz
odu
PID
7-39
Na
zada
nej s
zero
kośc
i pas
ma
7-4*
zaaw
. Pro
ces
PID
I7-
40Re
set
częś
ci I
PID
pro
cesu
7-41
Wyj
ście
PID
pro
cesu
neg
. Zac
isk
7-42
Wyj
ście
PID
pro
cesu
poz
. Zac
isk
7-43
Skal
a w
zmoc
. PID
pro
cesu
prz
y m
in.
War
t. z
ad.
7-44
Skal
a w
zmoc
. PID
pro
cesu
prz
y m
aks.
War
t. z
ad.
7-45
Źród
ło p
os. d
o p
rz. P
ID p
roce
su7-
46PI
D p
roc.
pos
. do
prz
. nor
m./o
dwr.
Ster
owan
ie7-
48Za
s. d
o p
rzod
u P
CD7-
49N
orm
./odw
r. w
yjśc
ie P
ID p
roc.
Ster
owan
ie7-
5*za
aw. P
ID II
pro
cesu
7-50
PID
pro
cesu
roz
szer
zony
PID
7-51
Wzm
oc. p
os. d
o p
rz. P
ID p
roce
su7-
52Ro
zpęd
z. p
os. d
o p
rz. P
ID p
roce
su7-
53Za
trz.
pos
. do
prz
. PID
pro
cesu
7-56
War
t. z
ad. P
ID p
roce
su c
zas
filtr
a7-
57Sp
rz. z
wr.
PID
pro
cesu
cza
s fil
tra
8-**
Kom
unik
. i o
pcje
8-0*
Ust
awie
nia
ogól
ne8-
01Źr
ódło
ste
row
ania
8-02
Źród
ło s
łow
a st
eruj
ąceg
o8-
03Cz
as t
ime-
outu
sło
wa
ster
ując
ego
8-04
Funk
cja
time-
out
słow
a st
eruj
.8-
05Fu
nkcj
a po
tim
e-ou
t
8-06
Rese
tu t
ime-
out
słow
a st
eruj
.8-
07W
łącz
enie
dia
gnos
tyki
8-08
Filtr
owan
ie o
dczy
tów
8-1*
Ster
owan
ie s
łow
a st
er.
8-10
Prof
il sł
owa
ster
ując
ego
8-13
Konf
igur
owan
e sł
owo
sta
tuso
we
STW
8-14
Konf
ig. s
łow
o s
teru
jące
CTW
8-3*
Ust
aw. p
ortu
FC
8-30
Prot
okół
8-31
Adr
es8-
32Sz
ybko
ść t
rans
mis
ji po
rtu
FC
8-33
Parz
yste
/ B
ity s
topu
8-34
Szac
owan
y cz
as c
yklu
8-35
Min
imal
ne o
późn
ieni
e od
pow
iedz
i8-
36M
aksy
mal
ne o
późn
ieni
e od
pow
iedz
i8-
37M
aks.
opó
źnie
nie
mię
dzy
znak
ami
8-4*
Nas
t. p
roto
kołu
MC
FC
8-40
Wyb
ór k
omun
ikat
u8-
41Pa
ram
etry
syg
nałó
w8-
42Ko
nfig
urac
ja z
apis
u P
CD8-
43Ko
nfig
urac
ja o
dczy
tu P
CD8-
5*W
ej.C
yf./M
agis
t.8-
50W
ybór
wyb
iegu
siln
ika
8-51
Wyb
ór s
zybk
iego
zat
rzym
ania
8-52
Wyb
ór h
amul
ca D
C8-
53W
ybór
sta
rtu
8-54
Wyb
ór z
mia
ny k
ieru
nku
obr
otów
8-55
Wyb
ór z
esta
wu
par
amet
rów
8-56
Wyb
ór p
rogr
amow
anej
war
tośc
iza
dane
j8-
57W
ybór
Pro
fidriv
e W
YŁ2
8-58
Wyb
ór P
rofid
rive
OFF
38-
8*D
iagn
os. p
ortu
FC
8-80
Licz
ba k
omun
ikat
ów m
agis
tral
i8-
81Li
czba
błę
dów
mag
istr
ali
8-82
Otr
z. k
omun
ikat
y sl
ave
8-83
Licz
ba b
łędó
w s
lave
8-9*
Pr.m
an z
mag
8-90
Pręd
.1 p
racy
man
ew.-J
og m
agis
tral
i8-
91Pr
ęd.2
pra
cy m
anew
.-Jog
mag
istr
ali
9-**
PRO
FIdr
ive
9-00
War
tość
zad
ana
reg.
9-07
War
tość
rze
czyw
ista
9-15
Konf
igur
acja
zap
isu
PCD
9-16
Odc
zyt
konf
igur
acji
PCD
9-18
Adr
es w
ęzła
9-22
Wyb
ór k
omun
ikat
u9-
23Pa
ram
etry
dla
syg
nałó
w9-
27Ed
ycja
par
amet
ru9-
28St
erow
anie
pro
cese
m9-
44Li
czni
k ko
mun
ikat
ów o
błę
dach
9-45
Kod
błę
du9-
47N
r bł
ędu
9-52
Licz
nik
sytu
acji
awar
yjny
ch9-
53Sł
owo
ost
rzeż
enia
Pro
fibus
9-63
Rzec
zyw
ista
prę
dkoś
ć tr
ansm
isji
9-64
Iden
tyfik
acja
urz
ądze
nia
9-65
Num
er p
rofil
u9-
67Sł
owo
ste
rują
ce 1
9-68
Słow
o s
tatu
sow
e 1
9-71
Zapi
s w
arto
ści d
anyc
h P
rofib
us9-
72Pr
ofib
us D
rive
Rese
t9-
75Id
enty
fikac
ja D
O9-
80Zd
efin
iow
ane
para
met
ry (1
)9-
81Zd
efin
iow
ane
para
met
ry (2
)9-
82Zd
efin
iow
ane
para
met
ry (3
)9-
83Zd
efin
iow
ane
para
met
ry (4
)9-
84Zd
efin
iow
ane
para
met
ry (5
)9-
90Zm
ieni
one
para
met
ry (1
)9-
91Zm
ieni
one
para
met
ry (2
)9-
92Zm
ieni
one
para
met
ry (3
)9-
93Zm
ieni
one
para
met
ry (4
)9-
94Zm
ieni
one
para
met
ry (5
)9-
99W
ersj
a Pr
ofib
us10
-**
Mag
is.k
omun
ik. C
AN
10-0
*W
spól
ne u
staw
ieni
a10
-00
Prot
okół
CA
N10
-01
Wyb
ór s
zybk
ości
tra
nsm
isji
10-0
2M
AC
ID10
-05
Odc
zyt
liczn
ika
błęd
ów n
adaw
ania
10-0
6O
dczy
t lic
znik
a bł
ędów
odb
ioró
w10
-07
Odc
zyt
liczn
ika
wył
ącze
ń m
agis
tral
i10
-1*
Dev
iceN
et10
-10
Wyb
ór t
ypu
dan
ych
pro
cesu
10-1
1Za
pis
konf
ig. d
anyc
h p
roce
su10
-12
Odc
zyt
konf
ig. d
anyc
h p
roce
su10
-13
Para
met
r os
trze
żeni
a10
-14
Siec
iow
a w
arto
ść z
adan
a10
-15
Ster
owan
ie s
ieci
owe
10-2
*Fi
ltry
COS
10-2
0Fi
ltr C
OS
110
-21
Filtr
CO
S 2
10-2
2Fi
ltr C
OS
310
-23
Filtr
CO
S 4
10-3
*D
ostę
p d
o p
aram
.10
-30
Inde
ks t
ablic
y10
-31
Zach
owaj
war
tośc
i dan
ych
10-3
2A
ktua
lizac
ja D
evic
eNet
10-3
3Za
wsz
e za
pis
10-3
4Ko
d p
rodu
ktu
Dev
iceN
et10
-39
Para
met
ry F
Dev
iceN
et10
-5*
CAN
open
10-5
0Za
pis
konf
igur
acji
dany
ch p
roce
su10
-51
Odc
zyt
konf
igur
acji
dany
ch p
roce
su12
-**
Ethe
rnet
12-0
*U
staw
ieni
a IP
12-0
0Pr
zypi
sani
e ad
resu
IP12
-01
Adr
es IP
12-0
2M
aska
pod
siec
i12
-03
Dom
yśln
a br
amka
12-0
4Se
rwer
DH
CP12
-05
Wyp
oż. w
ygas
a12
-06
Serw
ery
nazw
12-0
7N
azw
a do
men
y12
-08
Naz
wa
host
a12
-09
Adr
es fi
zycz
ny12
-1*
Par.
poł
. eth
erne
t.12
-10
Stan
poł
ącze
nia
O programowaniu przetwornic... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
40 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
55

12-1
1Tr
wał
ość
połą
czen
ia12
-12
Aut
o. n
egoc
jow
anie
12-1
3Pr
ęd. p
ołąc
zeni
a12
-14
Link
Dup
lex
12-2
*D
ane
proc
esow
e12
-20
Przy
kład
ste
row
ania
12-2
1Za
pis
konf
ig. d
anyc
h p
roce
su12
-22
Odc
zyt
konf
ig. d
anyc
h p
roce
su12
-23
Rozm
zap
is k
onfig
. dan
ych
pro
cesu
12-2
4Ro
zm o
dczy
t ko
nfig
. dan
ych
pro
cesu
12-2
7G
łów
ny m
aste
r12
-28
Zach
owaj
war
tośc
i dan
ych
12-2
9Za
wsz
e za
pis
12-3
*Et
herN
et/IP
12-3
0Pa
ram
etr
ostr
zeże
nia
12-3
1Si
ecio
wa
war
tość
zad
ana
12-3
2St
erow
anie
sie
ciow
e12
-33
Wer
sja
CIP
12-3
4Ko
d p
rodu
ktu
CIP
12-3
5Pa
ram
etr
EDS
12-3
7Ze
gar
blok
. CO
S12
-38
Filtr
CO
S12
-4*
Mod
bus
TCP
12-4
0Pa
ram
etr
stat
usu
12-4
1Li
czba
kom
unik
atów
sla
ve12
-42
Licz
ba k
omun
. wyj
ątko
wyc
h s
lave
12-5
*Et
herC
AT
12-5
0A
lias
konf
. sta
cji
12-5
1A
dres
kon
f. st
acji
12-5
9St
atus
Eth
erCA
T12
-8*
Inne
usł
. eth
erne
t.12
-80
Serw
er F
TP12
-81
Serw
er H
TTP
12-8
2U
sług
a SM
TP12
-89
Port
kan
ału
nie
wid
oczn
ego
gni
azda
12-9
*Za
aw. u
s. e
ther
net.
12-9
0D
iagn
osty
ka p
rzew
odów
12-9
1Sk
rzyż
owan
ie a
ut.
12-9
2Po
dsłu
ch IG
MP
12-9
3Bł
ędna
dł.
prze
wod
ów12
-94
Och
rona
prz
ed z
akłó
c. t
rans
mis
ji12
-95
Filtr
zak
łóce
ń t
rans
mis
ji12
-96
Konf
. por
tów
12-9
8Li
czni
ki in
terf
ejsu
12-9
9Li
czni
ki m
edió
w13
-**
Ster
owni
k zd
arze
ń13
-0*
Nas
taw
y SL
C13
-00
Tryb
ste
row
nika
SL
13-0
1Po
cząt
ek z
darz
enia
13-0
2Ko
niec
zda
rzen
ia13
-03
Kasu
j SLC
13-1
*Ko
mpa
rato
ry13
-10
Arg
umen
t ko
mpa
rato
ra13
-11
Ope
rato
r ko
mpa
rato
ra13
-12
War
tość
kom
para
tora
13-1
*RS
Flip
Flo
ps13
-15
RS-F
F O
pera
nd S
13-1
6RS
-FF
Ope
rand
R13
-2*
Zega
ry
13-2
0St
erow
nik
SL -
Tim
er13
-4*
Regu
ły lo
giki
13-4
0Re
guła
logi
czna
Boo
le’a
113
-41
Ope
rato
r re
guły
logi
czne
j 113
-42
Regu
ła lo
gicz
na B
oole
’a 2
13-4
3O
pera
tor
regu
ły lo
gicz
nej 2
13-4
4Re
guła
logi
czna
Boo
le'a
313
-5*
Stan
y13
-51
Ster
owni
k SL
- Z
darz
enie
13-5
2St
erow
nik
SL -
Akc
ja14
-**
Funk
cje
spec
jaln
e14
-0*
Prze
łącz
anie
inw
erte
ra14
-00
Sche
mat
prz
ełąc
zani
a14
-01
Częs
totli
woś
ć kl
uczo
wan
ia14
-03
Prze
mod
ulow
anie
14-0
4Lo
sow
e PW
M14
-06
Kom
pens
acja
cza
su m
artw
ego
14-1
*Za
sila
nie
wł./
wył
.14
-10
Aw
aria
zas
ilani
a14
-11
Nap
ięci
e za
sil.
przy
aw
arii
zasi
l.14
-12
Funk
cja
przy
nie
zrów
n. z
asila
nia
14-1
3Cz
ynni
k kr
oku
aw
arii
zasi
lani
a14
-14
Czas
kin
etyc
zn. o
dzys
ku r
ozru
chu
14-2
*W
ył.a
war
. i r
eset
14-2
0Tr
yb r
eset
owan
ia14
-21
Ods
tęp
pom
iędz
y pr
óbam
i aut
ore
star
tu14
-22
Tryb
pra
cy14
-23
Ust
awie
nie
kodu
typ
u14
-24
Opó
ź. w
ył. a
war
. prz
y og
r. p
rądu
14-2
5O
póź.
wył
. aw
ar. p
rzy
ogra
nicz
. mom
.14
-26
Opó
źnie
nie
wył
ącze
nia
przy
błę
dzie
inw
erto
ra14
-28
Ust
awie
nia
fabr
yczn
e14
-29
Kod
ser
wis
owy
14-3
*Re
g. o
gran
icze
nia
prąd
u14
-30
Kont
r. o
gr. p
rądu
, wzm
oc. p
ropo
rc.
14-3
1St
er. o
gr. p
rądu
, cza
s in
tegr
acji
14-3
2St
er. o
gran
icz.
prą
du, c
zas
filtr
a14
-35
Och
rona
prz
ed u
tkni
ęcie
m14
-4*
Opt
ymal
iz.e
nerg
ii14
-40
Pozi
om V
T14
-41
Min
imal
ny s
trum
ień
dla
AEO
14-4
2M
inim
alna
czę
stot
liwoś
ć A
EO14
-43
Cosf
i siln
ika
14-5
*Śr
odow
isko
14-5
0Fi
ltr R
FI14
-51
Kom
pens
acja
obw
odu
DC
14-5
2St
erow
anie
wen
tyla
tore
m14
-53
Mon
itoro
wan
ie w
enty
lato
ra14
-55
Filtr
wyj
ścio
wy
14-5
6Fi
ltr w
yjśc
iow
y po
jem
n.14
-57
Filtr
wyj
. ind
ukcy
jnoś
ci14
-59
Rzec
zyw
ista
licz
ba p
rzet
wor
nic
14-7
*Ko
mpa
tybi
lnoś
ć14
-72
Słow
o a
larm
owe
hist
oryc
zne
14-7
3Sł
owo
ost
rzeż
enia
his
tory
czne
14-7
4H
ist.
Zew
nętr
z. S
łow
o s
tatu
sow
e14
-8*
Opc
je
14-8
0O
pcja
zas
ilana
prz
ez z
ewn.
24
V D
C14
-89
Wyk
ryw
anie
opc
ji14
-9*
Ust
awie
nia
błęd
u14
-90
Pozi
om b
łędu
15-*
*In
form
acje
o p
rzet
wor
nicy
czę
stot
-liw
ości
15-0
*D
ane
eksp
loat
ac.
15-0
0G
odzi
ny p
racy
15-0
1G
odzi
ny p
racy
15-0
2Li
czni
k kW
h15
-03
Załą
czen
ia z
asila
nia
15-0
4Li
czba
prz
ekro
czeń
tem
p.15
-05
Licz
ba p
rzep
ięć
w D
C15
-06
Zero
wan
ie li
czni
ka k
Wh
15-0
7Ka
sow
anie
licz
nika
god
zin
pra
cy15
-1*
Ust
.reje
str.d
anyc
h15
-10
Źród
ło r
ejes
trac
ji15
-11
Częs
totli
woś
ć re
jest
row
ania
15-1
2Zd
arze
nie
wyz
wal
ając
e15
-13
Tryb
rej
estr
owan
ia15
-14
Prób
kow
anie
prz
ed w
yzw
olen
iem
15-2
*Re
jest
r hi
stor
ii15
-20
Reje
str
hist
orii:
Zda
rzen
ie15
-21
Reje
str
hist
orii:
war
tość
15-2
2Re
jest
r hi
stor
ii: c
zas
15-3
*Re
jest
r bł
ędów
15-3
0D
zien
nik
błęd
ów: k
od b
łędu
15-3
1D
zien
nik
błęd
ów: w
arto
ść15
-32
Dzi
enni
k bł
ędów
: cza
s15
-4*
Iden
tyfik
acja
nap
ędu
15-4
0Ty
p F
C15
-41
Sekc
ja m
ocy
15-4
2N
apię
cie
15-4
3W
ersj
a op
rogr
amow
ania
15-4
4Za
mów
ieni
owy
kod
spe
cyfik
acji
typu
15-4
5A
ktua
lny
kod
spe
cyfik
acji
typu
15-4
6N
r za
mów
ieni
owy
prze
twor
nicy
częs
totli
woś
ci15
-47
Num
er z
amów
ieni
owy
kart
y m
ocy
15-4
8N
r ID
LCP
15-4
9W
ersj
a op
rog.
kar
ty s
ter.
15-5
0Ka
rta
moc
y ID
SW
15-5
1N
r se
ryjn
y pr
zetw
orni
cy c
zęst
otliw
ości
15-5
3N
r se
ryjn
y ka
rty
moc
y15
-59
Naz
wa
plik
u C
SIV
15-6
*Id
enty
fikac
ja o
pcji
15-6
0O
pcja
zam
onto
wan
a15
-61
Opc
ja w
ersj
a op
rogr
amow
ania
15-6
2O
pcja
nr
zam
ówie
nia
15-6
3O
pcja
nr
sery
jny
15-7
0O
pcja
w g
nieź
dzie
A15
-71
Wer
sja
SW o
pcji
gnia
zda
A15
-72
Opc
ja w
gni
eźdz
ie B
15-7
3W
ersj
a op
rogr
amow
ania
opc
ji gn
iazd
aB
15-7
4O
pcja
w g
nieź
dzie
C0
15-7
5W
ersj
a op
rogr
amow
ania
opc
ji gn
iazd
aC0
15-7
6O
pcja
w g
nieź
dzie
C1
15-7
7W
ersj
a SW
opc
ji gn
iazd
a C1
15-9
*In
f. o
par
amet
rach
15-9
2Pa
ram
etry
zde
finio
wan
e15
-93
Para
met
ry z
mie
nion
e15
-98
Iden
tyfik
acja
nap
ędu
15-9
9M
etad
ane
para
met
rów
16-*
*O
dczy
ty d
anyc
h16
-0*
Stat
us o
góln
y16
-00
Słow
o s
teru
jące
16-0
1W
arto
ść z
adan
a [je
dnos
tka]
16-0
2W
arto
ść z
adan
a %
16-0
3Sł
owo
sta
tuso
we
16-0
5Rz
eczy
wis
ta w
arto
ść g
łów
na [%
]16
-09
Odc
zyt
nies
tand
ardo
wy
16-1
*St
atus
siln
ika
16-1
0M
oc [k
W]
16-1
1M
oc [K
M]
16-1
2N
apię
cie
siln
ika
16-1
3Cz
ęsto
tliw
ość
16-1
4Pr
ąd s
ilnik
a16
-15
Częs
totli
woś
ć [%
]16
-16
Mom
ent
obro
tow
y [N
m]
16-1
7Pr
ędko
ść [o
br./m
in.]
16-1
8Te
rmic
zne
siln
ika
16-1
9Te
mpe
ratu
ra c
zujn
ika
KTY
16-2
0Ką
t si
lnik
a16
-21
Wys
oka
rez.
mom
entu
obr
. [%
]16
-22
Mom
ent
obro
tow
y [%
]16
-25
Mom
ent
obro
tow
y [N
m]
wys
oki
16-3
*St
atus
nap
ędu
16-3
0N
apię
cie
w o
bwod
zie
pośr
edni
m D
C16
-32
Ener
gia
ham
owan
ia/s
16-3
3En
ergi
a ha
mow
./2 m
in.
16-3
4Te
mp.
rad
iato
ra16
-35
Stan
ter
mic
zny
inw
erte
ra16
-36
Znam
. Prą
d. In
w.
16-3
7Zn
am. P
rąd
mak
s.16
-38
Stan
ste
row
nika
SL
16-3
9Te
mp.
kar
ty s
teru
jące
j.16
-40
Zape
łnio
ny b
ufor
rej
estr
acji
16-4
1D
olna
lini
a st
atus
u L
CP16
-49
Źród
ło b
łędu
prą
du16
-5*
War
t.zad
.i sp
rz.z
wr.
16-5
0Ze
wnę
trzn
a w
arto
ść z
adan
a16
-51
Impu
lsow
a w
arto
ść z
adan
a16
-52
Sprz
ężen
ie z
wro
tne
[jedn
ostk
a]16
-53
War
tość
zad
ana
pote
ncjo
met
ru c
yfr.
16-5
7Sp
rzęż
enie
zw
rotn
e [o
br./m
in.]
16-6
*W
ejśc
ia i
Wyj
ścia
16-6
0W
ejśc
ie c
yfro
we
16-6
1U
staw
iani
e pr
zełą
czan
ia z
acis
ku 5
316
-62
Wej
ście
ana
logo
we
5316
-63
Ust
awia
nie
prze
łącz
enia
zac
isku
54
16-6
4W
ejśc
ie a
nalo
gow
e 54
16-6
5W
yjśc
ie a
nalo
gow
e 42
[mA
]16
-66
Wyj
ście
cyf
row
e [b
in]
16-6
7W
ejśc
ie c
zęst
otliw
ości
nr
29 [H
z]16
-68
Wej
ście
wej
ście
nr
33 [H
z]16
-69
Wyj
ście
impu
lsow
e nr
27
[Hz]
16-7
0W
yjśc
ie im
puls
owe
nr 2
9 [H
z]16
-71
Wyj
ście
prz
ekaź
niko
we
[bin
]16
-72
Licz
nik
A16
-73
Licz
nik
B16
-74
Licz
nik
prec
yzyj
nego
zat
rzym
ania
16-7
5W
ej. a
nalo
g. X
30/1
116
-76
Wej
. ana
log.
X30
/12
16-7
7W
yjśc
ie a
nalo
gow
e X3
0/8
[mA
]16
-78
Wyj
. ana
log.
X45
/1 [m
A]
16-7
9W
yj. a
nalo
g. X
45/3
[mA
]16
-8*
Mag
is.k
om.i
port
FC
16-8
01
CTW
mag
. kom
.16
-82
REF
mag
istr
ali k
omun
ikac
yjne
j 116
-84
STW
opc
ji ko
mun
ikac
ji16
-85
CTW
1 p
ortu
FC
16-8
6RE
F 1
port
u F
C16
-9*
Odc
zyty
dia
gnos
tyki
16-9
0Sł
owo
ala
rmow
e16
-91
Słow
o a
larm
owe
216
-92
Słow
o o
strz
eżen
ia16
-93
Słow
o o
strz
eżen
ia 2
16-9
4Ze
wnę
trz.
Sło
wo
sta
tuso
we
17-*
*O
pcja
spr
zęż.
zw
r.17
-1*
Inte
rfej
s en
k.17
-10
Typ
syg
nału
17-1
1Ro
zdzi
elcz
ość
(imp/
obr)
17-2
*A
bs. i
nter
fejs
enk
.17
-20
Wyb
ór p
roto
kołu
17-2
1Ro
zdzi
elcz
ość
(iloś
ć po
zycj
i/obr
ót)
17-2
4D
ługo
ść d
anyc
h S
SI17
-25
Częs
totli
woś
ć ze
gara
17-2
6Fo
rmat
dan
ych
SSI
17-3
4H
IPER
FACE
Szy
bkoś
ć tr
ansm
isji
17-5
*In
terf
ejs
rezo
lwer
a17
-50
Bieg
uny
17-5
1N
apię
cie
wej
ścio
we
17-5
2Cz
ęsto
tliw
ość
wej
ścio
wa
17-5
3W
spół
czyn
nik
tran
sfor
mac
ji17
-56
Sym
. enk
oder
a Ro
zdzi
elcz
ość
17-5
9In
terf
ejs
rezo
lwer
a17
-6*
Mon
itor.i
zas
toso
w.
17-6
0Ki
erun
ek s
przę
żeni
a zw
rotn
ego
17-6
1M
onito
row
. syg
nału
spr
zęż.
zwr.
18-*
*O
dczy
ty d
anyc
h 2
18-3
*O
dczy
ty a
nalo
gow
e18
-36
Wej
. ana
log.
X48
/2 [m
A]
18-3
7Te
mp.
Wej
. X48
/418
-38
Tem
p. W
ejśc
ie X
48/7
18-3
9Te
mp.
Wej
ście
X48
/10
18-6
*W
ejśc
ia i
wyj
. 218
-60
Wej
ście
cyf
row
e 2
18-9
0O
dczy
ty P
ID18
-90
Błąd
PID
pro
cesu
18-9
1W
yjśc
ie P
ID p
roce
su18
-92
Zaci
śnię
te w
yjśc
ie P
ID p
roce
su18
-93
Wyj
ście
ska
l. w
zmoc
. PID
pro
cesu
30-*
*Sp
ecja
lne
funk
cje
30-0
*Ki
wak
30-0
0Tr
yb n
awija
nia
O programowaniu przetwornic... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 41
5 5

30-0
1O
kno
czę
st. n
awij.
[Hz]
30-0
2O
kno
czę
st. n
awij.
[%]
30-0
3O
kno
czę
st. n
awij.
źró
dło
ska
low
ania
30-0
4Sk
ok c
zęst
. naw
ij. [H
z]30
-05
Skok
czę
st. n
awij.
[%]
30-0
6Cz
as s
koku
czę
st. n
awij.
30-0
7Cz
as c
yklu
naw
ijani
a30
-08
Czas
roz
pędz
./zw
al. d
la n
awij.
30-0
9Lo
sow
a fu
nkcj
a dl
a na
wija
nia
30-1
0W
spół
cz. n
awija
nia
30-1
1M
aks.
wsp
ółcz
. los
owy
dla
naw
ij.30
-12
Min
. wsp
ółcz
. los
owy
dla
naw
ij.30
-19
Okn
o c
zęst
. naw
ij. s
kal.
30-2
*za
aw. R
egul
.sta
rtu
30-2
0Cz
as w
ysok
iego
mom
entu
roz
ruch
. [s]
30-2
1Pr
ąd w
ysok
iego
mom
entu
roz
ruch
. [%
]30
-22
Zabe
zp. z
ablo
k. w
irnik
a30
-23
Czas
wyk
ryw
. blo
kow
ania
wirn
ika
[s]
30-8
*Ko
mpa
tybi
lnoś
ć (I)
30-8
0In
dukc
yjno
ść (L
d) w
osi
d30
-81
Rezy
stor
ham
ulca
(om
)30
-83
Prop
orc.
wzm
oc. P
ID p
ręd.
30-8
4W
zmoc
. pro
porc
. PID
pro
cesu
31-*
*O
pcja
obe
jści
a31
-00
Tryb
obe
jści
a(By
pass
)31
-01
Opó
źnie
nie
czas
u u
ruch
. obe
jści
a31
-02
Opó
źnie
nie
czas
u w
ył. o
bejś
cia
31-0
3A
ktyw
acja
try
bu t
esto
weg
o31
-10
Słow
o s
tatu
sow
e ob
ejśc
ia31
-11
God
ziny
pra
cy o
bejś
cia
31-1
9A
ktyw
acja
zda
lneg
o o
bejś
cia
32-*
*U
staw
ieni
a po
dsta
wow
e M
CO32
-0*
Enko
der
232
-00
Typ
syg
nału
prz
yros
tow
ego
32-0
1Ro
zdzi
elcz
ość
enko
dera
prz
yros
tow
ego
32-0
2Pr
otok
ół a
bsol
utny
32-0
3Ro
zdzi
elcz
ość
enko
dera
abs
olut
nego
32-0
4Sz
yb. t
rans
. enk
. abs
. X55
32-0
5D
ł.ram
ki d
anyc
h e
nkod
.abs
ol.
32-0
6Cz
ęst.z
egar
a en
kod.
abso
l.32
-07
Gen
er.z
egar
a en
kod.
bezw
zgl.
32-0
8D
ł. pr
zew
odu
enk
od. a
bsol
.32
-09
Mon
itoro
wan
ie e
nkod
era
32-1
0Ki
erun
ek o
brot
ów32
-11
Jedn
ostk
a uż
ytko
wni
ka -
mia
now
nik
32-1
2Je
dnos
tka
użyt
kow
nika
- li
czni
k32
-13
Ster
. enk
. 232
-14
ID w
ęzła
enk
. 232
-15
Och
r. C
AN
enk
. 232
-3*
Enko
der
132
-30
Typ
syg
nału
prz
yros
tow
ego
32-3
1Ro
zdzi
elcz
ość
enko
dera
prz
yros
tow
ego
32-3
2Pr
otok
ół a
bsol
utny
32-3
3Ro
zdzi
elcz
ość
enko
dera
abs
olut
nego
32-3
5D
ł.ram
ki d
anyc
h e
nkod
.abs
ol.
32-3
6Cz
ęst.z
egar
a en
kod.
abso
l.32
-37
Gen
er.z
egar
a en
kod.
bezw
zgl.
32-3
8D
ł. pr
zew
odu
enk
od. a
bsol
.32
-39
Mon
itoro
wan
ie e
nkod
era
32-4
0Te
rmin
acja
enk
oder
a32
-43
Ster
. enk
. 132
-44
ID w
ęzła
enk
. 132
-45
Och
r. C
AN
enk
. 132
-5*
Źród
ło s
przę
ż. z
wr.
32-5
0Źr
ódło
sla
ve32
-51
Ost
atni
e dz
iała
nie
MCO
302
32-5
2M
aste
r źr
ódła
32-6
*Re
gula
tor
PID
32-6
0W
zmoc
nien
ie p
ropo
rcjo
naln
e32
-61
Stał
a ró
żnic
zkow
ania
32-6
2St
ała
całk
owan
ia32
-63
War
tość
gra
nicz
na s
umy
całk
i32
-64
Szer
okoś
ć pa
sma
PID
32-6
5W
spół
cz. w
yprz
edze
nia
dla
pręd
kośc
i32
-66
Wsp
ółcz
.wyp
rz. d
la p
rzys
p.32
-67
Mak
s. t
oler
owan
y bł
ąd p
ołoż
enia
32-6
8O
dwro
tna
reak
cja
Slav
e32
-69
Czas
pró
bkow
ania
reg
ulat
ora
PID
32-7
0Cz
as s
kano
wan
ia g
ener
ator
a pr
ofili
32-7
1W
ielk
ość
okna
ste
row
ania
(akt
ywac
ja)
32-7
2W
ielk
ość
okna
ste
row
. (de
akty
wac
ja)
32-7
3Cz
as fi
ltra
ogr.
cał
kow
ania
32-7
4Cz
as fi
ltra
błęd
u p
oz.
32-8
*Pr
ędko
ść i
przy
spie
szen
ie32
-80
Mak
sym
alna
prę
dkoś
ć (e
nkod
er)
32-8
1N
ajkr
ótsz
y cz
as r
ozp.
/zat
rz.
32-8
2Pr
ofil
rozp
ędza
nia/
ham
owan
ia32
-83
Rozd
ziel
czoś
ć pr
ędko
ści
32-8
4D
omyś
lna
pręd
kość
32-8
5D
omyś
lne
przy
spie
szen
ie32
-86
Przy
sp. w
gór
ę do
ogr
. sza
rp.
32-8
7Pr
zysp
. w d
ół d
o o
gr. s
zarp
.32
-88
Zwol
n. w
gór
ę do
ogr
. sza
rp.
32-8
9Zw
oln.
w d
ół d
o o
gr. s
zarp
.32
-9*
Rozw
ój32
-90
Źród
ło u
suw
. błę
dów
33-*
*Za
awan
sow
ane
usta
wie
nia
MCO
33-0
*Ru
ch w
poz
ycji
wyj
ścio
wej
33-0
0W
ymus
zeni
e ru
chu
iden
tyfik
ując
ego
33-0
1Pr
zesu
nięc
ie o
d p
ozyc
ji w
yjśc
iow
ej33
-02
Czas
ram
p d
la r
uchu
iden
tyfik
ując
ego
33-0
3Pr
ędko
ść w
ruc
hu id
enty
fikac
yjny
m33
-04
Rodz
aje
ruch
u id
enty
fikuj
ąceg
o33
-1*
Sync
hron
izac
ja33
-10
Mas
ter
wsp
ółcz
. syn
ch.
33-1
1Sl
ave
wsp
ółcz
. syn
ch.
33-1
2O
ffset
poz
ycji
(poł
ożen
ia)
33-1
3O
kno
dok
ładn
ości
syn
chro
n. p
ozyc
ji33
-14
Ogr
anic
zeni
e w
zglę
d. p
rędk
ości
Sla
ve33
-15
Licz
ba z
nacz
nikó
w M
aste
r33
-16
Licz
ba z
nacz
nikó
w S
lave
33-1
7O
dleg
łość
mię
dzy
znac
znik
ami M
aste
r33
-18
Odl
egło
ść m
iędz
y zn
aczn
ikam
i Sla
ve33
-19
Typ
zna
czni
ka n
apęd
u M
aste
r33
-20
Typ
zna
czni
ka n
apęd
u S
lave
33-2
1O
kno
tol
eran
cji d
la z
nacz
nika
Mas
ter
33-2
2O
kno
tol
eran
cji d
la z
nacz
nika
Sla
ve33
-23
Rodz
aj s
tart
u s
ynch
r. z
nacz
niko
wej
33-2
4Bł
ąd -
iloś
ć zn
aczn
ików
33-2
5G
otow
ość
- ilo
ść z
nacz
nikó
w33
-26
Filtr
prę
dkoś
ci33
-27
Czas
prz
esun
ięci
a fil
tra
33-2
8Ko
nfig
urac
ja fi
ltru
zna
czni
ka33
-29
Stał
a cz
asow
a fil
tru
zna
czni
ka33
-30
Mak
sym
alna
kor
ekta
zna
czni
ka33
-31
Typ
syn
chro
niza
cji
33-3
2D
opas
. prę
d. p
od. d
o p
rzod
u33
-33
Okn
o fi
ltra
pręd
kośc
i33
-34
Czas
filtr
a zn
aczn
ika
slav
e33
-4*
Obs
ługa
ogr
anic
zeni
a33
-40
Reak
cja
na w
yłąc
znik
kra
ńcow
y33
-41
War
tość
dol
nego
lim
itu p
rogr
amow
ego
33-4
2W
arto
ść g
órne
go li
mitu
pro
gram
oweg
o33
-43
Akt
yw.d
olne
go li
mitu
pro
g.33
-44
Akt
yw.g
órn.
lim
itu p
rog.
33-4
5Cz
as w
okn
ie d
ocel
owym
33-4
6W
arto
ść o
gran
icze
nia
okna
doce
low
ego
33-4
7W
ielk
ość
okna
doc
elow
ego
33-5
*Ko
nfig
urac
ja w
e/w
y33
-50
Zaci
sk X
57/1
Wej
ście
cyf
row
e33
-51
Zaci
sk X
57/2
Wej
ście
cyf
row
e33
-52
Zaci
sk X
57/3
Wej
ście
cyf
row
e33
-53
Zaci
sk X
57/4
Wej
ście
cyf
row
e33
-54
Zaci
sk X
57/5
Wej
ście
cyf
row
e33
-55
Zaci
sk X
57/6
Wej
ście
cyf
row
e33
-56
Zaci
sk X
57/7
Wej
ście
cyf
row
e33
-57
Zaci
sk X
57/8
Wej
ście
cyf
row
e33
-58
Zaci
sk X
57/9
Wej
ście
cyf
row
e33
-59
Zaci
sk X
57/1
0 W
ejśc
ie c
yfro
we
33-6
0Tr
yb z
acis
ku X
59/1
i X5
9/2
33-6
1Za
cisk
X59
/1 W
ejśc
ie c
yfro
we
33-6
2Za
cisk
X59
/2 W
ejśc
ie c
yfro
we
33-6
3Za
cisk
X59
/1 W
yjśc
ie c
yfro
we
33-6
4Za
cisk
X59
/2 W
yjśc
ie c
yfro
we
33-6
5Za
cisk
X59
/3 W
yjśc
ie c
yfro
we
33-6
6Za
cisk
X59
/4 W
yjśc
ie c
yfro
we
33-6
7Za
cisk
X59
/5 W
yjśc
ie c
yfro
we
33-6
8Za
cisk
X59
/6 W
yjśc
ie c
yfro
we
33-6
9Za
cisk
X59
/7 W
yjśc
ie c
yfro
we
33-7
0Za
cisk
X59
/8 W
yjśc
ie c
yfro
we
33-8
*Pa
ram
etry
glo
baln
e33
-80
Num
er a
ktyw
owan
ego
pro
gram
u33
-81
Stat
us p
rzy
załą
czen
iu33
-82
Mon
itoro
wan
ie s
tatu
su p
rzet
wor
nicy
33-8
3Za
chow
anie
po
błę
dzie
33-8
4Za
chow
anie
po
wyj
ściu
33-8
5M
CO z
asil.
prze
z ze
w.ź
ródł
o 2
4V(p
r.st)
33-8
6Za
cisk
prz
y al
arm
ie33
-87
Stan
zac
isku
prz
y al
arm
ie33
-88
Słow
o s
tatu
s. p
rzy
alar
mie
33-9
*U
staw
. por
tu M
CO33
-90
ID w
ęzła
CA
N M
CO X
6233
-91
Szyb
kość
tra
nsm
isji
CAN
MCO
X62
33-9
4Za
końc
z. s
zere
gow
e RS
485
MCO
X60
33-9
5Sz
ybko
ść t
rans
mis
ji sz
er. R
S485
MCO
X60
34-*
*O
dczy
ty d
anyc
h M
CO34
-0*
Zapi
s pa
ram
etru
PCD
34-0
1Za
pis
PCD
1 d
o M
CO34
-02
Zapi
s PC
D 2
do
MCO
34-0
3Za
pis
PCD
3 d
o M
CO34
-04
Zapi
s PC
D 4
do
MCO
34-0
5Za
pis
PCD
5 d
o M
CO34
-06
Zapi
s PC
D 6
do
MCO
34-0
7Za
pis
PCD
7 d
o M
CO34
-08
Zapi
s PC
D 8
do
MCO
34-0
9Za
pis
PCD
9 d
o M
CO34
-10
Zapi
s PC
D 1
0 do
MCO
34-2
*O
dczy
t pa
ram
etru
PCD
34-2
1O
dczy
t PC
D 1
z M
CO34
-22
Odc
zyt
PCD
2 z
MCO
34-2
3O
dczy
t PC
D 3
z M
CO34
-24
Odc
zyt
PCD
4 z
MCO
34-2
5O
dczy
t PC
D 5
z M
CO34
-26
Odc
zyt
PCD
6 z
MCO
34-2
7O
dczy
t PC
D 7
z M
CO34
-28
Odc
zyt
PCD
8 z
MCO
34-2
9O
dczy
t PC
D 9
z M
CO34
-30
Odc
zyt
PCD
10
z M
CO34
-4*
Wej
ścia
i W
yjśc
ia34
-40
Wej
ścia
cyf
row
e34
-41
Wyj
ścia
cyf
row
e34
-5*
Dan
e pr
oces
owe
34-5
0A
ktua
lna
pozy
cja
34-5
1Po
zycj
a za
dana
34-5
2A
ktua
lna
pozy
cja
Mas
tera
34-5
3Po
zycj
a zn
aczn
ika
Slav
e34
-54
Pozy
cja
znac
znik
a M
aste
r34
-55
Poło
żeni
e kr
zyw
ej34
-56
Błąd
wys
zuki
wan
ia34
-57
Błąd
syn
chro
niza
cji
34-5
8A
ktua
lna
pręd
kość
34-5
9A
ktua
lna
pręd
kość
Mas
tera
34-6
0St
atus
syn
chro
niza
cji
34-6
1St
atus
osi
34-6
2St
atus
pro
gram
u34
-64
Stat
us M
CO 3
0234
-65
Ster
owan
ie M
CO 3
0234
-7*
Odc
zyty
dia
gnos
tyki
34-7
0M
CO S
łow
o a
larm
owe
134
-71
MCO
Sło
wo
ala
rmow
e 2
35-*
*O
pcja
wej
. czu
jnik
a35
-0*
Tem
p. t
ryb
wej
.35
-00
Zaci
sk X
48/4
. Tem
p. J
edno
stka
35-0
1Za
cisk
Typ
wej
ścia
X48
/435
-02
Zaci
sk X
48/7
. Tem
p. J
edno
stka
35-0
3Za
cisk
Typ
wej
ścia
X48
/735
-04
Zaci
sk X
48/1
0 Te
mp.
Jed
nost
ka35
-05
Zaci
sk T
yp w
ejśc
ia X
48/1
035
-06
Funk
cja
alar
mu
czu
jnik
a te
mpe
ratu
ry35
-1*
Tem
p. W
ej. X
48/4
35-1
4Za
cisk
X48
/4. S
tała
cza
sow
a fil
tra
35-1
5Za
cisk
X48
/4. T
emp.
Mon
itor
35-1
6Za
cisk
X48
/4. N
iska
tem
p. O
gran
icz.
35-1
7Za
cisk
X48
/4. W
ys. t
emp.
Ogr
anic
z.
35-2
*Te
mp.
Wej
ście
X48
/735
-24
Zaci
sk X
48/7
. Sta
ła c
zaso
wa
filtr
a35
-25
Zaci
sk X
48/7
. Tem
p. M
onito
r35
-26
Zaci
sk X
48/7
. Nis
ka t
emp.
Ogr
anic
z.35
-27
Zaci
sk X
48/7
. Wys
. tem
p. O
gran
icz.
35-3
*Te
mp.
Wej
ście
X48
/10
35-3
4Za
cisk
X48
/10.
Sta
ła c
zaso
wa
filtr
a35
-35
Zaci
sk X
48/1
0 Te
mp.
Mon
itor
35-3
6Za
cisk
X48
/10.
Nis
ka t
emp.
Ogr
anic
z.35
-37
Zaci
sk X
48/1
0. W
ys. t
emp.
Ogr
anic
z.35
-4*
Wej
. ana
log.
X48
/235
-42
Zaci
sk X
48/2
. Dol
na s
kala
prą
du35
-43
Zaci
sk X
48/2
. Gór
na s
kala
prą
du35
-44
Zaci
sk X
48/2
.Dol
.sk.
war
.zad
/sp.
zw. w
art.
35-4
5Za
cisk
X48
/2.G
ór.s
k.w
ar.z
ad/s
p.zw
. war
t.35
-46
Zaci
sk X
48/2
. Sta
ła c
zaso
wa
filtr
a
O programowaniu przetwornic... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
42 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
55

5.6 Zdalne programowanie zoprogramowaniem konfiguracyjnymMCT-10
Danfoss dysponuje oprogramowaniem do tworzenia,zapisywania i przesyłania przetwornica częstotliwościprogramów. Oprogramowanie MCT 10 Set-up Softwarepozwala użytkownikowi podłączyć komputer klasy PC doprzetwornica częstotliwości - zamiast korzystania z LCP - iprogramować ją w czasie rzeczywistym. Programprzetwornica częstotliwości można również stworzyć wtrybie offline, a następnie załadować do pamięciprzetwornica częstotliwości. Można także ściągnąćkompletny profil przetwornica częstotliwości na komputerklasy PC - celem wykonania kopii zapasowej lub jegoanalizy.
Komputer można podłączyć do przetwornica częstotliwościpoprzez port USB lub złącze RS-485.
MCT 10 Set-up Software można pobrać nieodpłatnie podadresem www.VLT-software.com. Oprogramowanie możnatakże zamówić na płycie CD, składając zamówienie naartykuł numer 130B1000. Szczegółowe instrukcje znajdująsię w podręczniku użytkownika.
O programowaniu przetwornic... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 43
5 5

6 Przykłady konfiguracji zastosowań
6.1 Wprowadzenie
WAŻNEprzetwornica częstotliwości pracujące z programowaniemfabrycznym mogą wymagać założenia przewodu zwiera-jącego na zaciskach 12 (lub 13) i 27. Szczegółoweinformacje znajdują się w 2.4.5.6 Zaciski zwierane 12 i 27.
Przykłady w niniejszym punkcie opisują skrótowo przykładypowszechnych aplikacji.
• Ustawienia parametru są regionalnymiwartościami domyślnymi, o ile nie wskazanoinaczej (wybranymi w 0-03 Ustawienia regionalne)
• Parametry powiązane z zaciskami i ichustawieniami przedstawiono obok ilustracji
• Jeżeli wymaga się ustawień przełączania zaciskówanalogowych A53 lub A54, są one wskazane nailustracjach
6.2 Przykłady zastosowań
Parametry
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B929
.10 Funkcja Ustawienie
1-29 Auto.dopasowanie dosilnika (AMA)
[1] Załączyćpełne AMA
5-12 Zacisk 27 -wej. cyfrowe
[2]* Wybiegsilnika,odwrócony
* = Wartość domyślna
Uwagi/komentarze: Należyustawić grupę parametrów 1-2*zgodnie z podłączonymsilnikiem
Tabela 6.1 AMA z podłączonym T27
Parametry
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B930
.10 Funkcja Ustawienie
1-29 Auto.dopasowanie dosilnika (AMA)
[1] Załączyćpełne AMA
5-12 Zacisk 27 -wej. cyfrowe
[0] Brakdziałania
* = Wartość domyślna
Uwagi/komentarze: Należyustawić grupę parametrów 1-2*zgodnie z podłączonymsilnikiem
Tabela 6.2 AMA bez podłączonego T27
Parametry
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
-10 - +10V
+
-
130B
B926
.10 Funkcja Ustawienie
6-10 Zacisk 53.Dolna skalanapięcia 0.07V*
6-11 Zacisk 53.Górna skalanapięcia
10V*
6-14 Zacisk 53.Dolna skala zad./sprz. zwr.
0RPM
6-15 Zacisk 53.Górna skala zad./sprz. zwr.
1500RPM
* = Wartość domyślna
Uwagi/komentarze:
Tabela 6.3 Wartość zadana prędkości, analogowa (napięciowa)
Przykłady konfiguracji zast... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
44 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
66
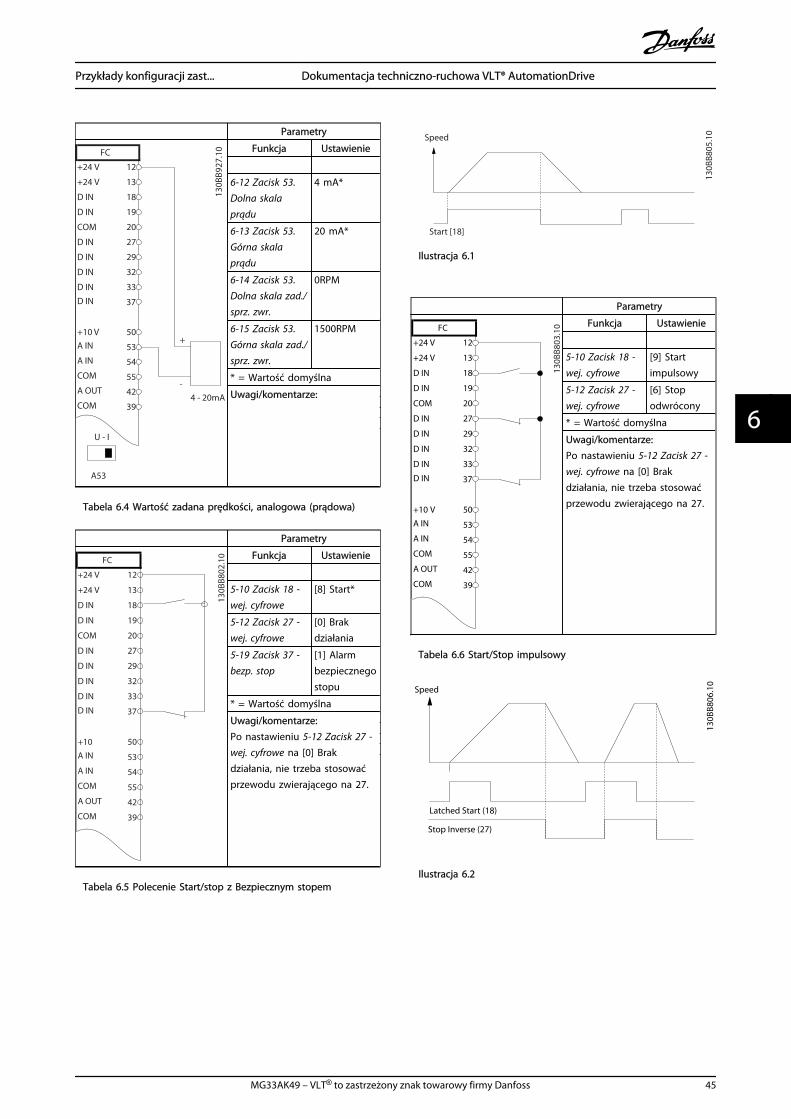
Parametry
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
4 - 20mA
+
-
130B
B927
.10 Funkcja Ustawienie
6-12 Zacisk 53.Dolna skalaprądu
4 mA*
6-13 Zacisk 53.Górna skalaprądu
20 mA*
6-14 Zacisk 53.Dolna skala zad./sprz. zwr.
0RPM
6-15 Zacisk 53.Górna skala zad./sprz. zwr.
1500RPM
* = Wartość domyślna
Uwagi/komentarze:
Tabela 6.4 Wartość zadana prędkości, analogowa (prądowa)
Parametry
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B802
.10 Funkcja Ustawienie
5-10 Zacisk 18 -wej. cyfrowe
[8] Start*
5-12 Zacisk 27 -wej. cyfrowe
[0] Brakdziałania
5-19 Zacisk 37 -bezp. stop
[1] Alarmbezpiecznegostopu
* = Wartość domyślna
Uwagi/komentarze:Po nastawieniu 5-12 Zacisk 27 -wej. cyfrowe na [0] Brakdziałania, nie trzeba stosowaćprzewodu zwierającego na 27.
Tabela 6.5 Polecenie Start/stop z Bezpiecznym stopem
130B
B805
.10
Speed
Start [18]
Ilustracja 6.1
Parametry
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B803
.10 Funkcja Ustawienie
5-10 Zacisk 18 -wej. cyfrowe
[9] Startimpulsowy
5-12 Zacisk 27 -wej. cyfrowe
[6] Stopodwrócony
* = Wartość domyślna
Uwagi/komentarze:Po nastawieniu 5-12 Zacisk 27 -wej. cyfrowe na [0] Brakdziałania, nie trzeba stosowaćprzewodu zwierającego na 27.
Tabela 6.6 Start/Stop impulsowy
Speed
130B
B806
.10
Latched Start (18)
Stop Inverse (27)
Ilustracja 6.2
Przykłady konfiguracji zast... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 45
6 6
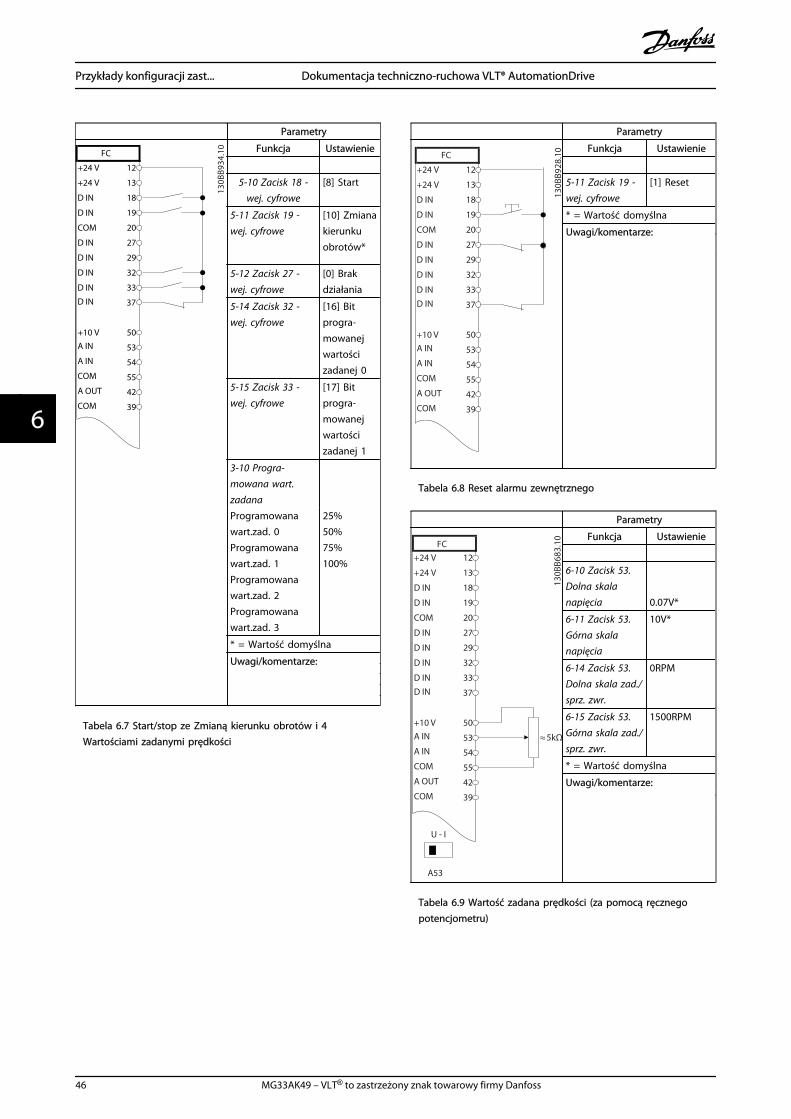
Parametry
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B934
.10 Funkcja Ustawienie
5-10 Zacisk 18 -wej. cyfrowe
[8] Start
5-11 Zacisk 19 -wej. cyfrowe
[10] Zmianakierunkuobrotów*
5-12 Zacisk 27 -wej. cyfrowe
[0] Brakdziałania
5-14 Zacisk 32 -wej. cyfrowe
[16] Bitprogra-mowanejwartościzadanej 0
5-15 Zacisk 33 -wej. cyfrowe
[17] Bitprogra-mowanejwartościzadanej 1
3-10 Progra-mowana wart.zadana
Programowanawart.zad. 0Programowanawart.zad. 1Programowanawart.zad. 2Programowanawart.zad. 3
25%50%75%100%
* = Wartość domyślna
Uwagi/komentarze:
Tabela 6.7 Start/stop ze Zmianą kierunku obrotów i 4Wartościami zadanymi prędkości
Parametry
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B928
.10 Funkcja Ustawienie
5-11 Zacisk 19 -wej. cyfrowe
[1] Reset
* = Wartość domyślna
Uwagi/komentarze:
Tabela 6.8 Reset alarmu zewnętrznego
Parametry
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
≈ 5kΩ
130B
B683
.10 Funkcja Ustawienie
6-10 Zacisk 53.Dolna skalanapięcia 0.07V*
6-11 Zacisk 53.Górna skalanapięcia
10V*
6-14 Zacisk 53.Dolna skala zad./sprz. zwr.
0RPM
6-15 Zacisk 53.Górna skala zad./sprz. zwr.
1500RPM
* = Wartość domyślna
Uwagi/komentarze:
Tabela 6.9 Wartość zadana prędkości (za pomocą ręcznegopotencjometru)
Przykłady konfiguracji zast... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
46 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
66

Parametry
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B804
.10 Funkcja Ustawienie
5-10 Zacisk 18 -wej. cyfrowe
[8] Start*
5-12 Zacisk 27 -wej. cyfrowe
[19]Zatrzaśnijwartośćzadaną
5-13 Zacisk 29 -wej. cyfrowe
[21]Zwiększanieprędkości
5-14 Zacisk 32 -wej. cyfrowe
[22] Zmniej-szenieprędkości
* = Wartość domyślna
Uwagi/komentarze:
Tabela 6.10 Przyspiesz/zwolnij
S t a r t ( 1 8 )
F r e e z e r e f ( 2 7 )
S p e e d u p ( 2 9 )
S p e e d d o w n ( 3 2 )
S p e e d
R e f e r e n c e
130B
B840
.10
Ilustracja 6.3
Parametry
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COMR1
R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
-
616869
RS-485
+13
0BB6
85.1
0 Funkcja Ustawienie
8-30 Protokół FC*
8-31 Adresmagistrali
1*
8-32 Szybkośćtransmisji
9600*
* = Wartość domyślna
Uwagi/komentarze:W powyższych parametrachnależy wybrać protokół, adres iszybkość transmisji.
Tabela 6.11 Podłączenie sieci RS-485
Przykłady konfiguracji zast... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 47
6 6
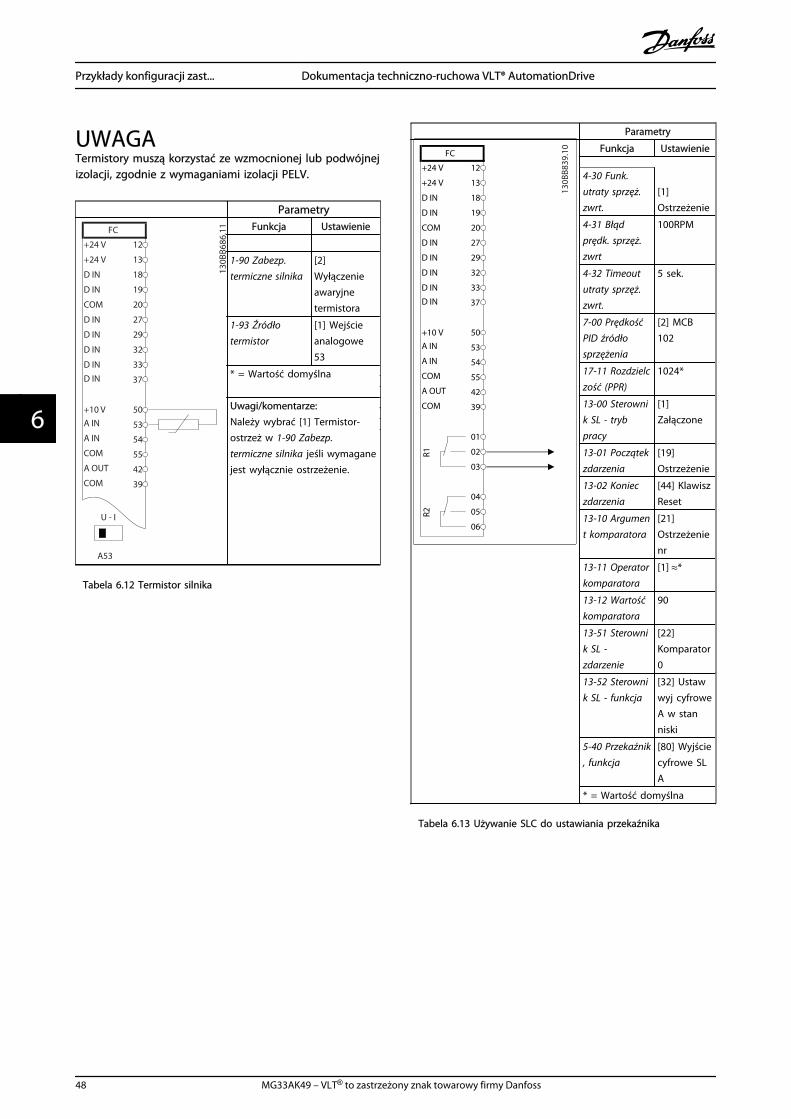
UWAGATermistory muszą korzystać ze wzmocnionej lub podwójnejizolacji, zgodnie z wymaganiami izolacji PELV.
Parametry
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
130B
B686
.11 Funkcja Ustawienie
1-90 Zabezp.termiczne silnika
[2]Wyłączenieawaryjnetermistora
1-93 Źródłotermistor
[1] Wejścieanalogowe53
* = Wartość domyślna
Uwagi/komentarze:Należy wybrać [1] Termistor-ostrzeż w 1-90 Zabezp.termiczne silnika jeśli wymaganejest wyłącznie ostrzeżenie.
Tabela 6.12 Termistor silnika
Parametry
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
130B
B839
.10 Funkcja Ustawienie
4-30 Funk.utraty sprzęż.zwrt.
[1]Ostrzeżenie
4-31 Błądprędk. sprzęż.zwrt
100RPM
4-32 Timeoututraty sprzęż.zwrt.
5 sek.
7-00 PrędkośćPID źródłosprzężenia
[2] MCB102
17-11 Rozdzielczość (PPR)
1024*
13-00 Sterownik SL - trybpracy
[1]Załączone
13-01 Początekzdarzenia
[19]Ostrzeżenie
13-02 Konieczdarzenia
[44] KlawiszReset
13-10 Argument komparatora
[21]Ostrzeżenienr
13-11 Operatorkomparatora
[1] ≈*
13-12 Wartośćkomparatora
90
13-51 Sterownik SL -zdarzenie
[22]Komparator0
13-52 Sterownik SL - funkcja
[32] Ustawwyj cyfroweA w stanniski
5-40 Przekaźnik, funkcja
[80] Wyjściecyfrowe SLA
* = Wartość domyślna
Tabela 6.13 Używanie SLC do ustawiania przekaźnika
Przykłady konfiguracji zast... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
48 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
66

Parametry
Funkcja Ustawienie
Uwagi/komentarze:Po przekroczeniu ograniczeniamonitora sprzężenia zwrotnegozostanie wygenerowaneOstrzeżenie 90. SLC monitorujeOstrzeżenie 90 i jeżeli jegowartość będzie PRAWDĄ, wtedyPrzekaźnik 1 zostanie włączony.Wówczas urządzeniazewnętrzne mogą wygenerowaćkomunikaty o koniecznościprzeprowadzenia obsługi. Jeżelibłąd sprzężenia zwrotnegoponownie przekroczy ograni-czenie w czasie 5 sek., wówczasprzetwornica częstotliwościbędzie pracowała ponownie,zaś ostrzeżenie zostanieusunięte. Jednakże Przekaźnik 1będzie wciąż włączony aż doużycia [Reset] na LCP.
Tabela 6.14 Używanie SLC do ustawiania przekaźnika
Parametry
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COMR1
R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
130B
B841
.10 Funkcja Ustawienie
5-40 Przekaźnik,funkcja
[32] Ster.hamulcamech.
5-10 Zacisk 18 -wej. cyfrowe
[8] Start*
5-11 Zacisk 19 -wej. cyfrowe
[11] Start zezmianąkierunkuobrotów
1-71 Opóźnieniestartu
0,2
1-72 Funkcjastartu
[5] VVCplus/FLUX zgodniez ruchemwskazówekzegara
1-76 Prądstartowy
Im,n
2-20 Prądzwalnianiahamulca
Zależnie odzastosowania
2-21 Prędkość dozałącz. hamulca[obr/min]
Połowaznamionowejwartościpoślizgusilnika
* = Wartość domyślna
Uwagi/komentarze:
Tabela 6.15 Sterowanie hamulcem mechanicznym
Start (18)
Start reversing (19)
Relay output
Speed
Time
Current
1-71 1-712-21 2-21
1-76
OpenClosed
130B
B842
.10
Ilustracja 6.4
Przykłady konfiguracji zast... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 49
6 6

7 Komunikaty na temat statusu
7.1 Wyświetlacz statusu
Jeżeli przetwornica częstotliwości jest w trybie statusu,komunikaty o statusie są generowane automatycznie przezprzetwornica częstotliwości i przedstawiane w dolnymwierszu wyświetlacza (patrz Ilustracja 7.1).
Status799RPM 7.83A 36.4kW
0.000
53.2%
1(1)
AutoHandOff
RemoteLocal
RampingStopRunningJogging...Stand by
130B
B037
.10
a b c
Ilustracja 7.1 Wyświetlacz statusu
a. Pierwsze słowo w wierszu statusu określa, skądpochodzi polecenie stop/start.
b. Drugie słowo w wierszu statusu określa, skądpochodzą sygnały sterujące silnika.
c. Ostatnia część wiersza statusu przedstawiaaktualny status przetwornica częstotliwości.Informuje on o trybie pracy, w którym znajdujesię przetwornica częstotliwości.
WAŻNEW trybie auto/zdalnym przetwornica częstotliwościwymaga sterowania zewnętrznymi poleceniami, abywykonywać swoje funkcje.
7.2 Tabela opisów komunikatówstatusowych
Poniższe trzy tabele zawierają opisy słów w komunikatachstatusowych.
Tryb pracy
Wyłączony Przetwornica częstotliwości nie odpowiada nażaden sygnał sterujący aż do chwili naciśnięciaprzycisku [Auto Zał.] lub [Hand on].
Auto on Przetwornica częstotliwości jest sterowanaprzez zaciski sterowania i/lub portykomunikacji szeregowej.
Hand on Przetwornica częstotliwości jest sterowanaprzyciskami nawigacyjnymi na LCP. Poleceniazatrzymania, resetowanie alarmu, zmianakierunku obrotów, hamowanie DC i innesygnały przesyłane przez zaciski sterowaniapowodują unieważnienie sterowanialokalnego.
Tabela 7.1
Miejsce wartości zadanej
Zdalne Wartość zadana prędkości pochodzi zsygnałów zewnętrznych, portu komunikacjiszeregowej lub wewnętrznych programo-wanych wartości zadanych.
Lokalna Przetwornica częstotliwości korzysta z wartościsterowania [Hand on] lub wartości zadanej zLCP.
Tabela 7.2
Status pracyHamulec AC Wybrano hamulec AC w 2-10 Funkcja
hamowania. Hamulec AC powoduje nadmiernenamagetyzowanie silnika w celu wykonaniakontrolowanego zwolnienia.
AMA zakoń.OK AMA (automatyczne dopasowanie silnika)wykonano pomyślnie.
AMA got. AMA (automatyczne dopasowanie silnika) jestgotowe do wykonania. Naciśnij [Hand on], abyuruchomić.
AMA trwa Proces AMA (automatycznego dopasowaniasilnika) trwa.
Hamowanie Czopper hamulca pracuje. Energia generowanajest pochłaniana przez rezystor hamowania.
Hamowaniemax.
Czopper hamulca pracuje. Osiągnięto ograni-czenie mocy rezystora hamowania określonew 2-12 Limit mocy hamowania (kW).
Komunikaty na temat statusu Dokumentacja techniczno-ruchowa VLT® AutomationDrive
50 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
77

Status pracyWybieg silnika • Odwrotny wybieg silnika wybrano jako
funkcję wejścia cyfrowego (grupaparametrów 5-1*). Odpowiadający jej zacisknie jest podłączony.
• Wybieg silnika włączony przez portkomunikacji szeregowej
SterowanieRozpędzanie/hamowanieha-mowanie
Sterowanie rozp/hamhamowanie wybrano w14-10 Awaria zasilania.
• Napięcie zasilania jest poniżej wartościustawionej w 14-11 Napięcie zasil. przyawarii zasil. podczas awarii zasilania
• Przetwornica częstotliwości zatrzymujesilnik poprzez kontrolowane zatrzymaniehamowanie
Poz.d.prądu Prąd wyjściowy przetwornicy częstotliwościprzekracza ograniczenie ustawione w4-51 Ostrzeżenie o dużym prądzie.
Poz.m.prądu Prąd wyjściowy przetwornicy częstotliwościjest poniżej ograniczenia ustawionego w4-52 Ostrzeżenie o małej prędkości.
Trzym.stałopr W 1-80 Funkcja przy stopie wybrano trzymaniestałoprądowe i aktywowano polecenie stop.Silnik jest utrzymywany przez prąd DCustawiony w 2-00 Prąd trzymania/podgrzaniaDC.
Zatrzym. DC Silnik jest utrzymywany prądem DC (2-01 Prądhamulca DC) przez określony czas (2-02 Czashamowania DC).
• Hamowanie DC zostało włączone w2-03 Pręd.dla załącz.hamow.DC[obr./min] iaktywowano polecenie stop.
• Hamowanie DC (odwrotne) wybrano jakofunkcję wejścia cyfrowego (grupaparametrów 5-1*). Odpowiadający jejterminal jest aktywny.
• Hamowanie DC zostało włączone przezport komunikacji szeregowej.
Wysokiesprzężeniezwrotne
Suma wszystkich włączonych sprzężeńzwrotnych przekracza ograniczenie ustawionew 4-57 Ostrzeżenie o wys.sprzęż.zwr..
Niskie sprzężeniezwrotne
Suma wszystkich włączonych sprzężeńzwrotnych jest poniżej ograniczeniaustawionego w 4-56 Ostrzeżenie o niskimsprzęż.zwr.
Status pracyZatrzaśnijwyjście
Zdalna wartość zadana jest aktywna, coutrzymuje obecną prędkość.
• Zatrzaśnięcie wyjścia wybrano jako funkcjęwejścia cyfrowego (grupa parametrów 5–1*). Odpowiadający jej terminal jestaktywny. Sterowanie prędkością jestmożliwe wyłącznie dzięki zaciskomzaprogramowanym na funkcje zwiększaniaprędkości i zmniejszania prędkości.
• Utrzymanie rozpędzania/zatrzymaniazostało włączone przez port komunikacjiszeregowej.
Żądanie zatrzaś-nięcia wyjścia
Wydane zostało polecenie zatrzaśnięciawyjścia, lecz silnik będzie zatrzymany domomentu otrzymania sygnału pozwalającegona uruchomienie.
Zatrzaśnij wart.zad.
Zatrzaśnięcie wartości zadanej wybrano jakofunkcję wejścia cyfrowego (grupa parametrów5-1*). Odpowiadający jej terminal jest aktywny.Przetwornica częstotliwości zapisujerzeczywistą wartość zadaną. Zmiana wartościzadanej jest możliwa wyłącznie dziękizaciskom zaprogramowanym na funkcjezwiększania prędkości i zmniejszaniaprędkości.
Żądanie Jog Wydane zostało polecenie JOG, lecz silnikzostanie zatrzymany do momentu otrzymaniaz wejścia cyfrowego sygnału pozwolenia nauruchomienie.
Jog - pracamanewrowa
Silnik pracuje według programu wprowa-dzonego do 3-19 Prędkość przy pracy przer.[RPM].
• Pracę manewrową wybrano jako funkcjęwejścia cyfrowego (grupa parametrów5-1*). Odpowiadający jej zacisk (np. zacisk29) jest aktywny.
• Funkcja pracy manewrowej zostaławłączona przez port komunikacjiszeregowej.
• Funkcja pracy manewrowej zostaławybrana w reakcji na funkcję monito-rowania (np. Brak sygnału). Funkcjamonitorowania jest aktywna.
Sprawdz.sil. W 1-80 Funkcja przy stopie wybranoSprawdzenie silnika. Komenda stop jestaktywna. Aby upewnić się, czy przetwornicaczęstotliwości i silnik są połączone ze sobą, dosilnika przykładany jest prąd testowy ciągły.
Komunikaty na temat statusu Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 51
7 7

Status pracySterow. OVC Kontrola przepięcia została włączona w
2-17 Kontrola przepięć. Podłączony silnikpodaje energię generowaną do przetwornicyczęstotliwości. Kontrola przepięcia regulujewspółczynnik V/Hz, aby pracował w trybiesterowanym i aby zapobiec wyłączeniuawaryjnemu przetwornicy częstotliwości.
WyłPowerUnit (Dla przetwornic częstotliwości z zewnętrznymzasilaniem 24 V.) Odcięto zasilanieprzetwornicy częstotliwości, lecz kartasterująca jest zasilana z zewnętrznego źródła24 V.
Tryb ochronny Włączono tryb ochronny. Jednostka wykryłastatus krytyczny (przetężenie lub przepięcie).
• Częstotliwość przełączania zostałazmniejszona do 4 kHz, aby zapobiecwyłączeniu awaryjnemu.
• Jeżeli to możliwe, tryb ochronny zostajewyłączony po ok. 10 sekundach.
• Tryb ochronny można ograniczyć w14-26 Opóź. wyłącz. przy błęd.
Szybkiezatrzymanie
Silnik zostaje zatrzymany szybkim zatrzy-maniem 3-81 Czas szybkiego rozpędz./zatrzym..
• Szybkie zatrzymanie odwrotne wybranojako funkcję wejścia cyfrowego (grupaparametrów 5-1*). Odpowiadający jejterminal jest aktywny.
• Funkcja szybkiego zatrzymania zostaławłączona przez port komunikacjiszeregowej.
Rozpędz./zwaln. Silnik rozpędza się/zwalnia dzięki aktywnemurozpędzeniu/zwalnianiu. Góra/dół . Nieosiągnięto wartości zadanej, wartości ograni-czenia lub stanu spoczynku.
Wys.war.zad. Suma wszystkich aktywnych wartości zadanychprzekracza ograniczenie wartości zadanychustawione w 4-55 Ostrzeżenie wysoka wartośćzadana.
Nis.war.zad. Suma wszystkich aktywnych wartości zadanychjest poniżej ograniczenia wartości zadanychustawionego w 4-54 Ostrzeżenie niska wartośćzadana.
Pr.wg w.zad. Przetwornica częstotliwości pracuje w zakresiewartości zadanych. Wartość sprzężeniazwrotnego odpowiada wartości nastawy.
Żądanieprzebiegu
Wydano polecenie start, lecz silnik jestzatrzymany do momentu otrzymania z wejściacyfrowego sygnału pozwalającego na urucho-mienie.
Praca Silnik jest napędzany przez przetwornicęczęstotliwości.
Duża prędk. Prędkość obrotowa silnika przekracza wartośćustawioną w 4-53 Ostrzeżenie o dużej prędkości.
Status pracyMała prędk. Prędkość obrotowa silnika jest poniżej
wartości ustawionej w 4-52 Ostrzeżenie o małejprędkości.
Stan gotow. W trybie Auto On przetwornica częstotliwościuruchomi silnik sygnałem startu z wyjściacyfrowego lub poprzez port komunikacjiszeregowej.
Opóź. startu W 1-71 Opóźnienie startu ustawionoopóźnienie startu. Włączono polecenie startu isilnik zostanie uruchomiony po upływie czasuopóźnienia startu.
Start prz/tył Start do przodu i start ze zmianą kierunkuwybrano jako funkcje dla dwóch osobnychwejść cyfrowych (grupa parametrów 5-1*).Silnik uruchomi się w normalnym lubprzeciwnym kierunku, w zależności od tego,który zacisk zostanie aktywowany.
Stop Przetwornica częstotliwości otrzymałapolecenie stop z LCP, przez wejście cyfrowelub poprzez port komunikacji szeregowej.
Wyłączenieawaryjne
Wystąpił alarm i silnik został zatrzymany. Powyłączeniu alarmu przetwornicę częstotliwościmożna zresetować ręcznie za pomocąprzycisku [Reset] lub zdalnie, poprzez zaciskisterowania lub port komunikacji szeregowej.
Wył.z blok. Wystąpił alarm i silnik został zatrzymany. Pousunięciu przyczyny alarmu należy podaćcykliczne zasilanie do przetwornicy częstot-liwości. Przetwornicę częstotliwości możnazresetować ręcznie za pomocą przycisku[Reset] lub zdalnie, poprzez zaciski sterowanialub port komunikacji szeregowej.
Tabela 7.3
Komunikaty na temat statusu Dokumentacja techniczno-ruchowa VLT® AutomationDrive
52 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
77

8 Ostrzeżenia i alarmy
8.1 Monitoring systemu
przetwornica częstotliwości monitoruje stan zasilaniawejściowego, wyjścia oraz współczynniki silnka, a takżeinne wskaźniki sprawności systemu. Ostrzeżenie bądź alarmnie musi oznaczać, że problem wystąpił na przetwornicaczęstotliwości. W wielu przypadkach oznacza to, że awariawystępuje z powodu napięcia wejściowego, obciążeniasilnika lub jego temperatury, sygnałów zewnętrznych lubinnych stref monitorowanych układem logicznymprzetwornicy częstotliwości. Należy sprawdzić wskazanemiejsca poza przetwornica częstotliwości, zgodnie zewskazaniem alarmu lub ostrzeżenia.
8.2 Typy ostrzeżeń i alarmów
OstrzeżeniaOstrzeżenie jest wydawane przed wystąpieniem stanualarmowego lub na skutek niezwykłych warunków pracy,mogących skutkować generowaniem alarmów przezprzetwornica częstotliwości. Ostrzeżenie jest samoistnieusuwane, jeżeli powyższy stan ustąpi.
AlarmyWyłączenie awaryjneAlarm zostaje wydany, gdy przetwornica częstotliwościulega wyłączeniu awaryjnemu, tj. gdy przetwornicaczęstotliwości zawiesza swoją pracę, aby zapobiecuszkodzeniom przetwornica częstotliwości lub systemu.Silnik wykonuje zatrzymanie z wybiegiem. Układ logicznyprzetwornica częstotliwości nadal pracuje, monitorującstatus przetwornica częstotliwości. Po usunięciu usterkimożna zresetować przetwornica częstotliwości. Wtedybędzie gotowa do dalszej pracy.
Wyłączenie awaryjne można zresetować na każdy z 4sposobów:
• Nacisnąć przycisk [Reset] na LCP
• Przez cyfrowe polecenie wejściowe resetu
• Polecenie wejściowe resetu z portu komunikacjiszeregowej
• Auto-Reset
Wyłączenie z blokadąAlarm, który powoduje wyłączenie awaryjne z blokadąprzetwornica częstotliwości wymaga wyłączenia i włączeniazasilania wejściowego. Silnik wykonuje zatrzymanie zwybiegiem. Układ logiczny przetwornica częstotliwościnadal pracuje, monitorując status przetwornicaczęstotliwości. Odciąć zasilanie wejściowe od przetwornicaczęstotliwości, usunąć przyczynę usterki a następnieprzywrócić zasilanie. Czynność ta wprowadza przetwornicaczęstotliwości w stan opisanego powyżej wyłączenia
awaryjnego, który można zresetować w dowolny zpowyższych czterech sposobów.
8.3 Wyświetlane ostrzeżenia i alarmy
130B
P085
.11
Status0.0Hz 0.000psi 0.00A
0.0Hz1:0 - Off
!Live zero error [W2]Off Remote Stop
!1(1)
Ilustracja 8.1
Na wyświetlaczu zacznie pulsować alarm lub alarmwyłączenia awaryjnego z blokadą oraz jego numer.
130B
P086
.11
Status0.0Hz 0.000kW 0.00A
0.0Hz0
Earth Fault [A14]Auto Remote Trip
1(1)
Ilustracja 8.2
Poza tekstem i numerem alarmu na wyświetlaczuprzetwornica częstotliwości, zaczną również pracowaćlampki wskaźników statusu.
Ostrzeżenia i alarmy Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 53
8 8

Autoon Reset
Handon Off
Back
Cancel
InfoOKOn
Alarm
Warn.
130B
B467
.10
Ilustracja 8.3
Dioda ostrzeż. Dioda alarmu
Ostrzeżenie ZAŁ. WYŁ.
Alarm WYŁ. ZAŁ. (Pulsuje)
Wyłączenie z blokadą ZAŁ. ZAŁ. (Pulsuje)
Tabela 8.1
Ostrzeżenia i alarmy Dokumentacja techniczno-ruchowa VLT® AutomationDrive
54 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
88
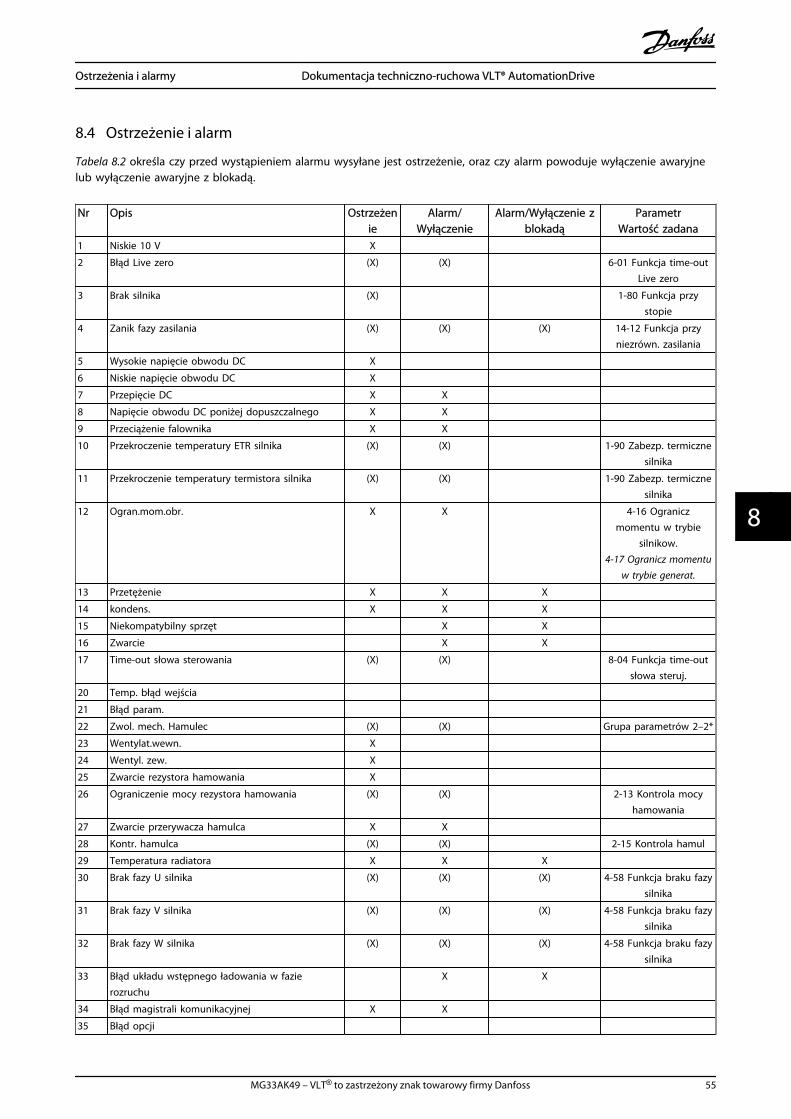
8.4 Ostrzeżenie i alarm
Tabela 8.2 określa czy przed wystąpieniem alarmu wysyłane jest ostrzeżenie, oraz czy alarm powoduje wyłączenie awaryjnelub wyłączenie awaryjne z blokadą.
Nr Opis Ostrzeżenie
Alarm/Wyłączenie
Alarm/Wyłączenie zblokadą
ParametrWartość zadana
1 Niskie 10 V X
2 Błąd Live zero (X) (X) 6-01 Funkcja time-outLive zero
3 Brak silnika (X) 1-80 Funkcja przystopie
4 Zanik fazy zasilania (X) (X) (X) 14-12 Funkcja przyniezrówn. zasilania
5 Wysokie napięcie obwodu DC X
6 Niskie napięcie obwodu DC X
7 Przepięcie DC X X
8 Napięcie obwodu DC poniżej dopuszczalnego X X
9 Przeciążenie falownika X X
10 Przekroczenie temperatury ETR silnika (X) (X) 1-90 Zabezp. termicznesilnika
11 Przekroczenie temperatury termistora silnika (X) (X) 1-90 Zabezp. termicznesilnika
12 Ogran.mom.obr. X X 4-16 Ograniczmomentu w trybie
silnikow.4-17 Ogranicz momentu
w trybie generat.
13 Przetężenie X X X
14 kondens. X X X
15 Niekompatybilny sprzęt X X
16 Zwarcie X X
17 Time-out słowa sterowania (X) (X) 8-04 Funkcja time-outsłowa steruj.
20 Temp. błąd wejścia
21 Błąd param.
22 Zwol. mech. Hamulec (X) (X) Grupa parametrów 2–2*
23 Wentylat.wewn. X
24 Wentyl. zew. X
25 Zwarcie rezystora hamowania X
26 Ograniczenie mocy rezystora hamowania (X) (X) 2-13 Kontrola mocyhamowania
27 Zwarcie przerywacza hamulca X X
28 Kontr. hamulca (X) (X) 2-15 Kontrola hamul
29 Temperatura radiatora X X X
30 Brak fazy U silnika (X) (X) (X) 4-58 Funkcja braku fazysilnika
31 Brak fazy V silnika (X) (X) (X) 4-58 Funkcja braku fazysilnika
32 Brak fazy W silnika (X) (X) (X) 4-58 Funkcja braku fazysilnika
33 Błąd układu wstępnego ładowania w fazierozruchu
X X
34 Błąd magistrali komunikacyjnej X X
35 Błąd opcji
Ostrzeżenia i alarmy Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 55
8 8

Nr Opis Ostrzeżenie
Alarm/Wyłączenie
Alarm/Wyłączenie zblokadą
ParametrWartość zadana
36 Błąd sieci zasil X X
37 Niezrówn. faz X
38 Błąd wewnętrzny X X
39 Czujnik radiatora X X
40 Przeciążenie wyjścia cyfrowego zacisku 27 (X) 5-00 Tryb wejść / wyjśćcyfr., 5-01 Zacisk 27.
Tryb
41 Przeciążenie wyjścia cyfrowego zacisku 29 (X) 5-00 Tryb wejść / wyjśćcyfr., 5-02 Zacisk 29.
Tryb
42 Przec.X30/6-7 (X)
43 Zew. zasilanie (opcja)
45 Błąd uziem. 2 X X X
46 Zasilanie karty mocy X X
47 Niskie zasilanie 24 V X X X
48 Niskie zasilanie 1,8 V X X
49 Ogranicz.pręd. X
50 Kalibracja AMA nie powiodła się X
51 AMA sprawdzenie Unom oraz Inom X
52 AMA niskie Inom X
53 AMA silnik zbyt duży X
54 AMA silnik zbyt mały X
55 Parametr AMA poza zakresem X
56 AMA przerwane przez użytkownika X
57 Time-out AMA X
58 Błąd wewnętrzny AMA X X
59 Ograniczenie prądu X 4-18 Ogr. prądu
61 Błąd sprz.zwr. (X) (X) 4-30 Funk. utratysprzęż. zwrt.
62 Maksymalne ograniczenie częstotliwościwyjściowej
X
63 Słaby hamulec mechaniczny (X) 2-20 Prąd zwalnianiahamulca
64 Ograniczenie napięcia X
65 Przegrzanie pulpitu sterowniczego X X X
66 Niska temperatura radiatora X
67 Konfiguracja opcji uległa zmianie X
68 Bezpieczny stop (X) (X)1) 5-19 Zacisk 37 - bezp.stop
69 Temperatura karty zasilającej X X
70 Nieprawidłowa konfiguracja FC X
71 Bezpieczny stopPTC 1
72 Niebezp. awaria
73 Aut.ur.po zat. (X) (X) 5-19 Zacisk 37 - bezp.stop
74 Termistor PTC X
75 Wyb. nieprawidłowy profil X
76 Konf.urz.zasil. X
77 Tryb zreduk. mocy X 14-59 Rzeczywistaliczba falowników
78 Błąd wyszukiwania (X) (X) 4-34 Funkcja błęduwyszuk.
Ostrzeżenia i alarmy Dokumentacja techniczno-ruchowa VLT® AutomationDrive
56 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
88

Nr Opis Ostrzeżenie
Alarm/Wyłączenie
Alarm/Wyłączenie zblokadą
ParametrWartość zadana
79 Nieprawidłowa konfiguracja PS X X
80 Przetwornica częstotliwości sprowadzona dowartości domyślnej
X
81 Uszkodz. CSIV X
82 Błąd par. CSIV X
83 Nieprawidłowa kombinacja opcji X
84 Brak opcji bezpieczeństwa X
88 Wykrywanie opcji X
89 Poślizg hamulca mechanicznego X
90 Monitor sprzężenia zwrotnego (X) (X) 17-61 Monitorowaniesygnału sprz. zwr.
91 Błędne ustawienia wejścia analogowego 54 X S202
163 ATEX ETR ostrz.ogr.pr. X
164 ATEX ETR alarm ogr.pr. X
165 ATEX ETR ostrz.ogr.częs. X
166 ATEX ETR alarm ogr.częst. X
243 Hamulec IGBT X X X
244 Temperatura radiatora X X X
245 Czujnik radiatora X X
246 Zas.karty mocy X
247 Tem.karty mocy X X
248 Nieprawidłowa konfiguracja PS X
249 Nis.temp.pros. X
250 Nowe części zamienne X
251 Nowy rodz.kodu X X
Tabela 8.2 Lista kodów alarmów/ostrzeżeń
(X) Zależnie od parametru1) Nie można wykonać automatycznego resetu poprzez 14-20 Trybresetowania
8.4.1 Komunikaty o błędach
Przedstawione poniżej informacje o ostrzeżeniach/alarmachokreślają stan ostrzeżenia/alarmu, sugerują prawdo-podobną przyczynę wystąpienia stanu, a także określająprocedurę zaradczą lub usuwania usterek.
OSTRZEŻENIE 1, Niskie 10 VNapięcie karty sterującej z zacisku 50 jest poniżej 10 V.Należy usunąć część obciążenia z zacisku 50, gdyż zasilanie10 V jest przeciążone. Maks. 15 mA lub minimum 590 Ω.
Ta sytuacja może być spowodowana zwarciem w przyłą-czonym potencjometrze lub nieprawidłowym okablowaniupotencjometru.
Rozwiązanie problemu: Usunąć okablowanie z zacisku 50.Jeżeli ostrzeżenie zniknie, problem leży w okablowaniuzałożonym przez klienta. Jeżeli ostrzeżenie nie zniknie,wymienić kartę sterującą.
OSTRZEŻENIE/ALARM 2, Błąd Live zeroTo ostrzeżenie lub alarm będzie się pojawiać tylko wtedy,gdy zostanie zaprogramowane przez użytkownika w6-01 Funkcja time-out Live zero. Sygnał na jednym z wejść
analogowych jest mniejszy, niż 50% minimalnej wartościzaprogramowanej dla tego wejścia. Sytuacja ta może byćspowodowana uszkodzonymi przewodami lub awariąurządzenia przesyłającego sygnał.
Usuwanie usterekSprawdzić połączenia wszystkich zacisków wejśćanalogowych. Zaciski karty sterującej 53 i 54 dosygnałów, zacisk 55 wspólny. Zaciski 11 i 12 MCB101 do sygnałów, zacisk 10 wspólny. Zaciski 1, 3,5 MCB 109 do sygnałów, zaciski 2, 4, 6 wspólne.
Sprawdzić, czy sposób zaprogramowaniaprzetwornica częstotliwości i konfiguracjaprzełączników są odpowiednie dla sygnału typuanalogowego.
Wykonać sprawdzenie sygnału zaciskuwejściowego.
OSTRZEŻENIE/ALARM 3, brak silnikaDo wyjścia przetwornica częstotliwości nie podłączonożadnego silnika.
OSTRZEŻENIE/ALARM 4, Zanik fazy zasilaniaZanik fazy po stronie zasilania lub asymetria napięciazasilania jest zbyt duża. Ten komunikat pojawia się równieżw przypadku błędu prostownika wejściowego wprzetwornica częstotliwości. Opcje są programowane w14-12 Funkcja przy niezrówn. zasilania.
Ostrzeżenia i alarmy Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 57
8 8

Rozwiązanie problemu: Należy sprawdzić napięcie zasilaniai prądy zasilania przetwornica częstotliwości.
OSTRZEŻENIE 5, Wysokie napięcie obwodu DCNapięcie obwodu pośredniego (DC) przekroczyło ograni-czenie ostrzeżenia o wysokim napięciu. Ograniczenie tozależy od wartości znamionowej napięcia przetwornicaczęstotliwości. Urządzenie nadal jest aktywne.
OSTRZEŻENIE 6, Niskie napięcie obwodu DCNapięcie obwodu pośredniego (DC) spadło poniżej ograni-czenia ostrzeżenia o niskim napięciu. Ograniczenie tozależy od wartości znamionowej napięcia przetwornicaczęstotliwości. Urządzenie nadal jest aktywne.
OSTRZEŻENIE/ALARM 7, Przepięcie DCJeśli napięcie obwodu pośredniego przekracza ograni-czenie, po pewnym czasie przetwornica częstotliwościwyłączy się awaryjnie.
Usuwanie usterekPodłączyć rezystor hamowania
Wydłużyć czas rozpędzania/zatrzymania
Zmienić typ profilu rozpędzania/zatrzymania
Włączyć funkcje w 2-10 Funkcja hamowania
Zwiększyć 14-26 Opóź. wyłącz. przy błęd.
OSTRZEŻENIE/ALARM 8, Napięcie obwodu DC poniżejdopuszczalnegoJeśli napięcie obwodu pośredniego (DC) spadnie poniżejograniczenia zbyt niskiego napięcia, przetwornicaczęstotliwości sprawdza, czy podłączono zasilanierezerwowe 24 V DC. Jeśli nie podłączono zasilaniarezerwowego 24 V DC, przetwornica częstotliwości wyłączysię awaryjnie po ustalonym czasie. Opóźnienie to jest różnedla różnych wielkości urządzeń.
Rozwiązanie problemu:Sprawdzić, czy napięcie zasilania odpowiadanapięciu przetwornica częstotliwości.
Wykonać sprawdzenie napięcia wejściowego
Wykonać sprawdzenie miękkiego ładowania
OSTRZEŻENIE/ALARM 9, Przeciążenie inwerteraprzetwornica częstotliwości wyłączy się z powoduprzeciążenia (zbyt duży prąd przez zbyt długi czas). Licznikelektronicznego zabezpieczenia termicznego inwertorawysyła ostrzeżenie przy 98% i wyłącza przetwornicęawaryjnie przy 100%, wysyłając alarm. przetwornicaczęstotliwości nie można zresetować, dopóki licznikwskazuje więcej niż 90%.Błąd polega na tym, że przetwornica częstotliwości jestzbyt długo przeciążone o więcej niż 100%.
Usuwanie usterekPorównać prąd wyjściowy podany na LCP zprądem znamionowym przetwornicaczęstotliwości.
Porównać prąd wyjściowy podany na LCP zezmierzonym prądem silnika.
Wyświetlić termiczne obciążenie przetwornicy naLCP i monitorować wartość. Podczas pracypowyżej wartości znamionowej prądu ciągłegoprzetwornica częstotliwości, licznik powinienzwiększyć wartość. Podczas pracy poniżej wartościznamionowej prądu ciągłego przetwornicaczęstotliwości, licznik powinien zmniejszyćwartość.
Jeżeli wymagana jest duża częstotliwość przełączania,więcej szczegółów można znaleźć w rozdziale ZaleceńProjektowych mówiącym o obniżaniu wartości znamio-nowych.
OSTRZEŻENIE/ALARM 10, Przekroczenie temperatury przyprzeciążeniu silnikaWedług systemu elektronicznej ochrony termicznej (ETR),silnik jest zbyt gorący. Wybrać, czy przetwornicaczęstotliwości ma wysyłać ostrzeżenie lub alarm, kiedylicznik osiągnie 100% w 1-90 Zabezp. termiczne silnika. Błądten występuje, gdy silnik jest zbyt długo przeciążony owięcej niż 100%.
Usuwanie usterekSprawdzić, czy silnik się nie przegrzewa.
Sprawdzić, czy silnik nie jest przeciążonymechanicznie.
Sprawdzić czy w 1-24 Prąd silnika ustawionowłaściwą wartość prądu silnika.
Sprawdzić, czy dane silnika w parametrach 1-20do 1-25 są ustawione prawidłowo.
Jeżeli używany jest zewnętrzny wentylator,sprawdzić, czy wybrano 1-91 Wentylator zewn.silnika.
Przeprowadzenie AMA w 1-29 Auto. dopasowaniedo silnika (AMA) pozwoli dokładniej dostroićprzetwornica częstotliwości do silnika i zmniejszyćobciążenie termiczne.
OSTRZEŻENIE/ALARM 11, Nadmierna temp. termistorasilnikaTermistor może być odłączony. Wybrać, czy przetwornicaczęstotliwości ma wysyłać ostrzeżenie lub alarm w1-90 Zabezp. termiczne silnika.
Usuwanie usterekSprawdzić, czy silnik się nie przegrzewa.
Sprawdzić, czy silnik nie jest przeciążonymechanicznie.
Ostrzeżenia i alarmy Dokumentacja techniczno-ruchowa VLT® AutomationDrive
58 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
88

Jeżeli zacisk 53 lub 54 jest używany, sprawdzić,czy termistor jest poprawnie podłączony międzyzaciskiem 53 lub 54 (analogowe wejście napięcia)i zaciskiem 50 (zasilanie +10 V) i czy przełącznikzacisku 53 lub 54 jest ustawiony na napięcie.Sprawdzić czy 1-93 Źródło termistor wybiera zacisk53 lub 54.
Jeżeli używany jest zacisk 18 lub 19, sprawdzićczy między zaciskiem 18 lub 19 (wejście cyfrowe,tylko PNP) i zaciskiem 50 został poprawniepodłączony termistor. Sprawdzić czy 1-93 Źródłotermistor wybiera zacisk 18 lub 19.
OSTRZEŻENIE/ALARM 12, Ogran.mom.obr.Moment jest przekroczył wartość w 4-16 Ogranicz momentuw trybie silnikow. lub wartość w 4-17 Ogranicz momentu wtrybie generat.. 14-25 Opóźn. wył. samocz. przy ogr. mom.może być użyty do dokonania zmiany ze stanu wyłącznieostrzeżenia na ostrzeżenie, po którym następuje alarm.
Usuwanie usterekJeżeli ograniczenie momentu obrotowego silnikajest przekraczane podczas rozpędzania , należyzwiększyć czas rozpędzania.
Jeżeli ograniczenie momentu obrotowegogeneratora jest przekraczane podczas zwalniania ,należy zwiększyć czas zwalniania.
Jeżeli ograniczenie momentu obrotowegowystępuje podczas pracy, należy, w miaręmożliwości, zwiększyć ograniczenie momentuobrotowego. Należy jednak upewnić się, czyukład może pracować bezpiecznie z wyższymmomentem obrotowym.
Sprawdzić, czy aplikacja nie pobiera nadmiernejilości prądu na silniku.
OSTRZEŻENIE/ALARM 13, PrzetężenieOgraniczenie prądu szczytowego inwertora (ok. 200%prądu znamionowego) zostało przekroczone. Ostrzeżenietrwa ok. 1,5 sekundy, po czym przetwornica częstotliwościwyłącza się, generując alarm. Ta awaria może byćspowodowana przez obciążenie udarowe lub gwałtowneprzyspieszenie przy obciążeniach o dużej bezwładności.Jeśli zostanie wybrane rozszerzone sterowaniehamowaniem mechanicznym, wyłączenie awaryjne możnazresetować z zewnątrz.
Rozwiązanie problemu:
Odłączyć zasilanie i sprawdzić, czy można obrócićwał silnika.
Sprawdzić, czy rozmiar silnika jest właściwy dlaprzetwornica częstotliwości.
Sprawdzić, czy dane silnika w parametrach 1-20do 1-25 są ustawione prawidłowo.
ALARM 14, Błąd uziemieniaWystępuje prąd z faz wyjściowych do ziemi, albo w kablupomiędzy przetwornica częstotliwości i silnikiem, albo wsamym silniku.
Rozwiązanie problemu:Odłączyć zasilanie od przetwornica częstotliwościi usunąć usterkę uziemienia.
Zmierzyć rezystancję uziemienia przewodówsilnika i samego silnika megaomomierzem, abysprawdzić błędy doziemienia w silniku.
ALARM 15, Niekompatybilny sprzętZamontowana opcja nie jest obsługiwana przez sprzęt luboprogramowanie obecnego pulpitu sterowniczego.
Zapisać wartości poniższych parametrów i skontaktowaćsię ze swoim przedstawicielem Danfoss:
15-40 Typ FC
15-41 Sekcja mocy
15-42 Napięcie
15-43 Wersja oprogramowania
15-45 Aktualny kod specyfikacji typu
15-49 Karta sterująca ID SW
15-50 Karta mocy ID SW
15-60 Opcja zamontowany
15-61 Opcja wersja oprogramowania (dla każdegogniazda opcji)
ALARM 16, ZwarcieZwarcie w silniku lub w jego kablach.
Odłączyć zasilanie od przetwornica częstotliwości i usunąćzwarcie.
OSTRZEŻENIE/ALARM 17, Limit czasu słowa sterującegoBrak komunikacji z przetwornica częstotliwości.Ostrzeżenie będzie aktywne pod warunkiem, że8-04 Funkcja time-out słowa steruj. NIE został ustawiony naWYŁ.Jeśli 8-04 Funkcja time-out słowa steruj. jest ustawiony naStop i Wyłączenie awaryjne, pojawi się ostrzeżenie iprzetwornica częstotliwości zacznie zwalniać aż dowyłączenia, generując alarm.
Rozwiązanie problemu:Sprawdzić połączenia kabla komunikacjiszeregowej.
Zwiększyć 8-03 Czas time-out słowa steruj.
Sprawdzić działanie sprzętu komunikacyjnego.
Sprawdzić poprawność instalacji względemwymogów EMC.
OSTRZEŻENIE/ALARM 20, Błąd we. temp.Czujnik temperatury nie jest podłączony.
Ostrzeżenia i alarmy Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 59
8 8

OSTRZEŻENIE/ALARM 21, Błąd parametruParametr jest poza zakresem. Numer parametru jestzgłaszany na LCP. Należy sprowadzić ten parametr dopoprawnej wartości.
OSTRZEŻENIE/ALARM 22, Zwolnienie hamulcamechanicznegoWyświetlana wartość informuje o rodzaju. 0 = Wartość odn.momentu nie została osiągnięta przed upływem limituczasu. 1 = Nie było sprzężenia zwrotnego przed upływemlimitu czasu.
OSTRZEŻENIE 23, Błąd wentylatora wewnętrznegoFunkcja ostrzegawcza wentylatora jest funkcjązapewniającą dodatkową ochronę, która sprawdza, czywentylator działa / jest zamontowany. Funkcję ostrze-gawczą wentylatora można wyłączyć w 14-53 Monitoringwentylatora ([0] Wyłączone).
Dla przetwornic z ramami D i E oraz filtrów z ramą F,monitorowane jest regulowane napięcie do wentylatorów.
Rozwiązanie problemu:Sprawdzić, czy wentylator działa prawidłowo.
Wyłączyć a następnie włączyć zasilanieprzetwornica częstotliwości, sprawdzając czywentylator włącza się na chwilę podczasrozruchu.
Sprawdzić czujniki na radiatorze i karciesterującej.
OSTRZEŻENIE 24, Błąd wentylatora zewnętrznegoFunkcja ostrzegawcza wentylatora jest funkcjązapewniającą dodatkową ochronę, która sprawdza, czywentylator działa / jest zamontowany. Funkcję ostrze-gawczą wentylatora można wyłączyć w 14-53 Monitoringwentylatora ([0] Wyłączone).
Rozwiązanie problemu:Sprawdzić, czy wentylator działa prawidłowo.
Wyłączyć a następnie włączyć zasilanieprzetwornica częstotliwości, sprawdzając czywentylator włącza się na chwilę podczasrozruchu.
Sprawdzić czujniki na radiatorze i karciesterującej.
OSTRZEŻENIE 25, Zwarcie rezystora hamowaniaRezystor hamulca jest monitorowany podczas pracy. Jeślipojawi się w nim zwarcie, funkcja hamowania zostaniewyłączona i pojawi się ostrzeżenie. przetwornicaczęstotliwości nadal pracuje, ale bez funkcji hamowania.Odłączyć zasilanie od przetwornica częstotliwości iwymienić rezystor hamowania (patrz 2-15 Kontrola hamul).
OSTRZEŻENIE/ALARM 26, Ograniczenie mocy rezystorahamowaniaMoc przesyłana do rezystora hamowania jest wyliczanajako średnia wartość z ostatnich 120 sekund czasu pracy.Obliczenia te opierają się na napięciu obwodu pośredniegoi wartości rezystancji hamulca ustawionej w 2-16 Maks.
prąd hamulca AC. Ostrzeżenie jest aktywowane, kiedyrozproszona moc hamowania przekracza 90% mocyrezystancji hamulca. Jeśli w 2-13 Kontrola mocy hamowaniawybrano Wyłączenie awaryjne [2], przetwornicaczęstotliwości wyłącza się awaryjnie, kiedy rozproszonamoc hamowania osiągnie 100%.
OSTRZEŻENIE/ALARM 27, Błąd przerywacza hamulcaTranzystor hamowania jest monitorowany podczas pracy ijeśli wystąpi na nim zwarcie, funkcja hamowania jestwyłączana i wysyłane jest ostrzeżenie. przetwornicaczęstotliwości nadal może pracować, lecz ponieważ doszłodo zwarcia w tranzystorze hamulca, znaczna moc jestprzesyłana do rezystora hamowania, nawet jeśli jest onnieaktywny.Należy odłączyć zasilanie od przetwornica częstotliwości iusunąć rezystor hamowania.
OSTRZEŻENIE/ALARM 28, Kontrola hamulca zakończyła sięniepowodzeniemRezystor hamowania nie jest podłączony lub nie działa.Sprawdzić 2-15 Kontrola hamul.
ALARM 29, Temp. radiatoraMaksymalna temperatura radiatora została przekroczona.Błąd temperatury nie zostanie zresetowany, dopókitemperatura nie spadnie poniżej określonej temperaturyradiatora. Próg wyłączenia samoczynnego i resetu zależyod poziomu mocy przetwornica częstotliwości.
Rozwiązanie problemu:Sprawdzić, czy występują poniższe warunki.
Zbyt wysoka temperatura otoczenia.
Zbyt długi kabel silnika.
Czy istnieje nieodpowiedni prześwit nad i podprzetwornica częstotliwości
Zablokowany obieg powietrza wokółprzetwornica częstotliwości.
Uszkodzony wentylator radiatora.
Brudny radiator.
ALARM 30, Brak fazy U silnikaBrak fazy U silnika między przetwornica częstotliwości isilnikiem.
Odłączyć zasilanie od przetwornica częstotliwości isprawdzić fazę U silnika.
ALARM 31, Brak fazy V silnikaZanik fazy V silnika między przetwornica częstotliwości isilnikiem.
Odłączyć zasilanie od przetwornica częstotliwości isprawdzić fazę V silnika.
ALARM 32, Brak fazy W silnikaBrak fazy W silnika między przetwornica częstotliwości isilnikiem.
Odłączyć zasilanie od przetwornica częstotliwości isprawdzić fazę W silnika.
Ostrzeżenia i alarmy Dokumentacja techniczno-ruchowa VLT® AutomationDrive
60 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
88

ALARM 33, Błąd układu wstępnego ładowaniaWystąpiło zbyt wiele załączeń zasilania w krótkim okresieczasu. Pozostawić urządzenie do wychłodzenia dotemperatury roboczej.
OSTRZEŻENIE/ALARM 34, Błąd komunikacji magistralakomunikacyjnaKomunikacja pomiędzy magistralą komunikacyjną i kartąopcji komunikacji nie działa.
OSTRZEŻENIE/ALARM 35, błąd opcjiOtrzymano alarm opcji. Alarm ten dotyczy danej opcji.Jego prawdopodobną przyczyną jest błąd włączeniazasilania lub komunikacji.
OSTRZEŻENIE/ALARM 36, Błąd sieci zasilTo ostrzeżenie/alarm jest aktywne pod warunkiem, żenapięcie zasilania do przetwornica częstotliwości zostałoprzerwane oraz że 14-10 Awaria zasilania NIE jestustawiony na [0] Brak funkcji. Sprawdzić bezpieczniki nalinii do przetwornica częstotliwości i źródło zasilaniaurządzenia.
ALARM 37, Niezrównoważenie fazPomiędzy urządzeniami zasilającymi jest niezrównoważenieprądu.
ALARM 38, Błąd wewnętrznyW przypadku wystąpienia błędu wewnętrznego, nawyświetlaczu pojawi się numer kodu błędu przedsta-wionego w poniższej tabeli.
Usuwanie usterekWyłączyć i ponownie włączyć zasilanie
Sprawdzić, czy opcja jest prawidłowo zainsta-lowana
Sprawdzić, czy połączenia nie są obluzowane lubczy nie brakuje któregoś z nich
Może zajść potrzeba kontaktu z dostawcą lub działemobsługi Danfoss. Należy zapisać numer kodu w celudalszego usuwania usterek.
Nr Tekst0 Port szeregowy nie może zostać uruchomiony.
Skontaktować się z przedstawicielem Danfoss lubdziałem obsługi Danfoss.
256-258 Dane dotyczące mocy EEPROM są wadliwe lubprzestarzałe
512-519 Błąd wewnętrzny. Skontaktować się z przedstawi-cielem Danfoss lub działem obsługi Danfoss.
783 Wartość parametru przekracza ograniczeniamin/max
1024-1284 Błąd wewnętrzny. Skontaktować się z przedstawi-cielem Danfoss lub działem obsługi Danfoss.
1299 SW opcji w gnieździe A jest przestarzałe
1300 SW opcji w gnieździe B jest przestarzałe
1302 SW opcji w gnieździe C1 jest przestarzałe
1315 SW opcji w gnieździe A nie jest obsługiwane(niedozwolone)
Nr Tekst1316 SW opcji w gnieździe B nie jest obsługiwane
(niedozwolone)
1318 SW opcji w gnieździe C1 nie jest obsługiwane(niedozwolone)
1379-2819 Błąd wewnętrzny. Skontaktować się z przedstawi-cielem Danfoss lub działem obsługi Danfoss.
2820 Przekroczenie rejestru LCP
2821 Przekroczenie portu szeregowego
2822 Przekroczenie portu USB
3072-5122 Wartość parametru przekracza swoje ograniczenia
5123 Opcja w gnieździe A Sprzęt niekompatybilny zpulpitem sterowniczym sprzętu
5124 Opcja w gnieździe B Sprzęt niekompatybilny zpulpitem sterowniczym sprzętu
5125 Opcja w gnieździe C0: Sprzęt niekompatybilny zpulpitem sterowniczym sprzętu
5126 Opcja w gnieździe C1: Sprzęt niekompatybilny zpulpitem sterowniczym sprzętu
5376-6231 Błąd wewnętrzny. Skontaktować się z przedstawi-cielem Danfoss lub działem obsługi Danfoss.
Tabela 8.3
ALARM 39, Czujnik radiatoraBrak sprzężenia zwrotnego z czujnika temperaturyradiatora.
Sygnał z czujnika termicznego IGBT nie jest dostępny nakarcie mocy. Problem może dotyczyć karty mocy, kartysprzęgacza optycznego lub kabla taśmowego pomiędzykartą mocy a kartą sprzęgacza optycznego.
OSTRZEŻENIE 40, Przeciążenie wyjścia cyfrowego zacisku27Sprawdzić obciążenie podłączone do zacisku 27 lub usunąćpołączenie powodujące zwarcie. Sprawdzić 5-00 Trybwejść / wyjść cyfr. i 5-01 Zacisk 27. Tryb.
OSTRZEŻENIE 41, Przeciążenie wyjścia cyfrowego zacisku29Sprawdzić obciążenie podłączone do zacisku 29 lub usunąćpołączenie powodujące zwarcie. Sprawdzić 5-00 Trybwejść / wyjść cyfr. i 5-02 Zacisk 29. Tryb.
OSTRZEŻENIE 42, Przeciążenie wyjścia cyfrowego na X30/6lub przeciążenie wyjścia cyfrowego na X30/7Dla X30/6, sprawdzić obciążenie podłączone do X30/6 lubusunąć połączenie powodujące zwarcie. Sprawdź 5-32 Wyj.cyfr. zacisku X30/6 (MCB 101).
Dla X30/7, sprawdzić obciążenie podłączone do X30/7 lubusunąć połączenie powodujące zwarcie. Sprawdź 5-33 Wyj.cyfr. zacisku X30/7 (MCB 101).
ALARM 43, Zew. zasilanieMCB 113 zew. Opcja przekaźnika została zamontowana bezzewnętrznego zasilania 24 V DC. Podłączyć zewnętrznezasilanie 24 V DC lub określić za pomocą 14-80 Opcjazasilana przez zewn. 24 V DC [0] że zasilanie zewnętrzne nie
Ostrzeżenia i alarmy Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 61
8 8

jest używane. Zmiana 14-80 Opcja zasilana przez zewn. 24 VDC wymaga wyłączenia i włączenia zasilania.
ALARM 45, Błąd uziem. 2Błąd uziemienia podczas rozruchu.
Usuwanie usterekSprawdzić, czy uziemienie wykonano prawidłowoi czy połączenia nie są obluzowane.
Sprawdzić, czy przekrój przewodu jestprawidłowy.
Sprawdzić kable silnika pod kątem zwarć lubprądów upływowych.
ALARM 46, Zasilanie karty mocyZasilanie na karcie mocy jest poza zakresem.
Na karcie mocy są trzy rodzaje zasilania generowane przezzasilacz trybu przełączania (SMPS) na karcie mocy: 24V, 5V,+/- 18V. W przypadku zasilania 24 V DC z opcją MCB 107,monitorowane jest tylko zasilanie 24 V i 5 V. Przy zasilaniunapięciem trójfazowym, monitorowane są wszystkie trzyrodzaje zasilania.
Usuwanie usterekSprawdzić, czy karta mocy nie jest uszkodzona.
Sprawdzić, czy karta sterująca nie jestuszkodzona.
Sprawdzić, czy karta opcji nie jest uszkodzona.
W przypadku zasilania 24 V DC, należy sprawdzićto źródło zasilania.
OSTRZEŻENIE 47, Niskie zasil.24VZasilanie 24 V DC jest mierzone na karcie sterującej.Zewnętrzne zasilanie rezerwowe 24V DC może byćprzeciążone; w przeciwnym razie należy skontaktować się zprzedstawicielem firmy Danfoss.
OSTRZEŻENIE 48, Niskie zas.1,8VZasilanie 1,8 V DC używane na karcie sterującej jest pozadopuszczalnym zakresem. Zasilanie jest mierzone na karciesterującej. Sprawdzić, czy karta sterująca nie jestuszkodzona. Jeżeli zainstalowano kartę opcji, sprawdzić, czynie występuje na niej przepięcie.
OSTRZEŻENIE 49, Ogranicz.pręd.Gdy prędkość jest poza zakresem określonym w4-11 Ogranicz. nis. prędk. silnika [obr/min] i 4-13 Ograniczwys. prędk. silnika [obr/min], przetwornica częstotliwościpokaże ostrzeżenie. Gdy prędkość jest poniżej ograniczeniaokreślonego w 1-86 Nis.pręd.wył.aw. [obr./min] (z wyjątkiemuruchamiania i zatrzymywania), przetwornica częstotliwościwyłączy się awaryjnie.
ALARM 50, niepomyślnie zakończona kalibracja AMASkontaktować się z przedstawicielem Danfoss lub działemobsługi Danfoss.
ALARM 51, Sprawdzenie Unom oraz Inom AMAPrawdopodobnie ustawienia napięcia silnika, prądu silnika imocy silnika są nieprawidłowe. Sprawdzić ustawienia wparametrach od 1-20 do 1-25.
ALARM 52, Niskie Inom AMAPrąd silnika jest zbyt mały. Sprawdzić ustawienia w4-18 Ogr. prądu.
ALARM 53, AMA silnik jest zbyt dużySilnik jest zbyt duży, aby przeprowadzić procedurę AMA.
ALARM 54, AMA silnk jest zbyt małySilnik jest zbyt mały, aby przeprowadzić procedurę AMA.
ALARM 55, parametr AMA poza zakresemWartości parametrów silnika są poza dopuszczalnymzakresem. AMA nie zadziała.
ALARM 56, AMA przerwane przez użytkownikaProcedura AMA została przerwana przez użytkownika.
ALARM 57, Timeout AMANależy spróbować zrestartować AMA. Często powtarzanyrestar może spowodować przegrzanie silnika.
ALARM 58, błąd wewnętrzny AMASkontaktować się z przedstawicielem firmy Danfoss.
OSTRZEŻENIE 59, Ograniczenie prąduPrąd silnika jest wyższy od wartości w 4-18 Ogr. prądu.Sprawdzić, czy dane silnika w parametrach 1-20 do 1-25 sąustawione prawidłowo. Zwiększyć ograniczenie prądu wmiarę możliwości. Należy upewnić się, czy układ możebezpiecznie pracować przy zwiększonym ograniczeniu.
OSTRZEŻENIE 60, Blokada zewnętrznaSygnał na wejściu cyfrowym wskazuje na błąd pozaprzetwornica częstotliwości. Zewnętrzna blokada wydałapolecenie wyłączenia awaryjnego przetwornicaczęstotliwości. Usunąć błąd zewnętrzny. Aby wznowićnormalną pracę, należy doprowadzić 24 V DC do zaciskuzaprogramowanego dla blokady zewnętrznej. Zresetowaćprzetwornica częstotliwości.
OSTRZEŻENIE/ALARM 61, Błąd sprzężenia zwrotnegoWykryto rozbieżnośća pomiarem prędkości pochodzącym zurządzenia obsługującego sprzężenie zwrotne. Ustawieniefunkcji Ostrzeżenie/Alarm/Wyłączanie jest w 4-30 Funk.utraty sprzęż. zwrt.. Ustawienie akceptowanego błędu jest w4-31 Błąd prędk. sprzęż. zwrt, zaś dopuszczalny czas nawystąpienie błędu w 4-32 Timeout utraty sprzęż. zwrt..Funkcja ta może nie działać podczas procedury oddawaniado eksploatacji.
OSTRZEŻENIE 62, Maksymalne ograniczenie częstotliwościwyjściowejCzęstotliwość wyjściowa osiagnęła wartość ustawioną w4-19 Maks. częstotliwość wyjś.. Należy sprawdzić aplikację,aby określić przyczynę. Zwiększyć ograniczenie częstot-liwości wyjściowej. Należy upewnić się, czy układ możebezpiecznie pracować ze zwiększoną częstotliwościąwyjściową. Ostrzeżenie zostanie usunięte, gdy wartośćwyjściowa spadnie poniżej granicy maksymalnej.
ALARM 63, Słaby hamulec mechanicznyRzeczywisty prąd silnika nie przekroczył prądu „zwalnianiahamulca” w oknie czasowym „Opóźnienia startu”.
Ostrzeżenia i alarmy Dokumentacja techniczno-ruchowa VLT® AutomationDrive
62 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
88

OSTRZEŻENIE/ALARM 65, Przekroczenie temperatury kartysterującejTemperatura wyłączenia karty sterującej wynosi 80° C.
Usuwanie usterek
• Sprawdzić, czy robocza temperatura otoczeniamieści się w wymaganym zakresie.
• Sprawdzić, czy filtry nie są zapchane.
• Sprawdzić działanie wentylatora.
• Sprawdzić kartę sterującą.
OSTRZEŻENIE 66, Niska temperatura radiatoraprzetwornica częstotliwości jest zbyt zimna, by mogłapracować. To ostrzeżenie jest zależne od czujnikatemperatury w module IGBT.Zwiększyć temperaturę otoczenia urządzenia. Podczaskażdego zatrzymania silnika można podać niewielką ilośćprądu do przetwornica częstotliwości, ustawiając 2-00 Prądtrzymania/podgrzania DC na 5% i 1-80 Funkcja przy stopie.
ALARM 67, Konfiguracja opcjonalnego modułu uległazmianieOd ostatniego wyłączenia zasilania dodano lub usuniętojedną lub więcej opcji. Upewnić się, czy zmianakonfiguracji była zamierzona, a następnie zresetowaćurządzenie.
ALARM 68, Bezpieczny stop włączonyUtrata sygnału 24 V DC na zacisku 37 spowodowaławyłączenie awaryjne filtra. Aby wznowić normalną pracęnależy doprowadzić 24 V DC do zacisku 37, a następniezresetować filtr.
ALARM 69, Przegrzanie karty mocyPrzegrzanie karty mocyCzujnik temperatury na karcie mocy jest albo za gorący,albo za zimny.
Usuwanie usterekSprawdzić, czy robocza temperatura otoczeniamieści się w wymaganym zakresie.
Sprawdzić, czy filtry nie są zapchane.
Sprawdzić działanie wentylatora.
Sprawdzić kartę mocy.
ALARM 70, błędna konfiguracja FCKarta sterująca jest niekompatybilna z kartą mocy. Należyskontaktować się z przedstawicielem producenta, podaćkod typu z tabliczki znamionowej urządzenia oraz numerykatalogowe obu kart w celu sprawdzenia ich zgodności.
ALARM 71, Bezpieczny stop PTC 1Został uruchomiony bezpieczny Stop z . Karta termistoraPTC (silnik za ciepły). Tryb zwykłej pracy urządzenia możezostać przywrócony po ponownym zastosowaniu przez napięcia 24 V DC na T-37 (kiedy temperatura silnikaosiągnie odpowiedni poziom) oraz po dezaktywacji wejściacyfrowego z . Należy wtedy wysłać sygnał Reset (zapomocą magistrali, we/wy cyfrowego lub naciskającprzycisk [RESET]).
ALARM 72, Niebezpieczna awariaBezpieczny Stop z wyłączeniem awaryjnym z blokadą.Alarm niebezpiecznej awarii jest uruchamiany, gdynastępuje nieoczekiwana kombinacja poleceńbezpiecznego stopu. Ma to miejsce, gdy karta termistora VLT włączy X44/10, lecz z jakiegoś powodu bezpiecznystop nie jest włączony. Oprócz tego, jeżeli jest jedynymurządzeniem używającym bezpiecznego stopu (określonympoprzez wybór [4] lub [5] w 5-19 Zacisk 37 - bezp. stop),nieoczekiwaną kombinacją jest aktywacja bezpiecznegostopu bez aktywacji X44/10. Poniższa tabela zawierazestawienie nieoczekiwanych kombinacji, które powodująAlarm 72. Proszę zauważyć, że jeżeli aktywowano X44/10poprzez wybór 2 lub 3, sygnał ten jest ignorowany! Jednak wciąż może aktywować Bezpieczny stop.
OSTRZEŻENIE 73, Autom. ponowne uruchomieniebezpiecznego stopuBezpiecznie zatrzymane. Uwaga: jeśli włączony jestautomatyczny restart, silnik może się uruchomić pousunięciu tej usterki.
ALARM 74, Termistor PTCAlarm związany z opcją ATEX. PTC nie działa.
ALARM 75, Błędny wyb. profiluNie można zapisać tego parametru w trakcie pracy silnika.Przed zapisem np. profilu MCO w 8-10 Profil słowasterującego, należy zatrzymać silnik.
OSTRZEŻENIE 76, Konfiguracja urządzeń zasilającychWymagana liczba urządzeń zasilających nie jest zgodna zwykrytą liczbą aktywnych urządzeń zasilających.
Rozwiązanie problemu:Podczas wymiany modułu ramy F, ostrzeżenie to pojawi sięjeżeli dane dotyczące zasilania w karcie zasilającej modułunie zgadzają się z danymi z pozostałej części przetwornicaczęstotliwości. Proszę sprawdzić, czy część zamienna i jejkarta zasilająca mają odpowiednie numery części.
77 OSTRZEŻENIE, Tryb zreduk. mocyTo ostrzeżenie oznacza, że przetwornica częstotliwościpracuje w trybie zredukowanej mocy (tzn. z mniejszą liczbączęści falownika, niż dozwolona). To ostrzeżenie będziegenerowane w trakcie cyklu mocy, gdy przetwornicaczęstotliwości jest ustawiona na pracę z mniejszą ilościąfalowników i pozostanie włączone.
ALARM 78, Błąd wyszukiwaniaRóżnica pomiędzy wartością nastawy i wartościąrzeczywistą przekracza wartość w 4-35 Błąd wyszukiwania.Wyłączyć funkcję poprzez 4-34 Funkcja błędu wyszuk. lubwybrać alarm/ostrzeżenie również w 4-34 Funkcja błęduwyszuk.. Sprawdzić elementy mechaniczne wokółobciążenia i silnika, sprawdzić połączenia sprzężeniazwrotnego z silnika - enkodera - do przetwornicaczęstotliwości. Wybrać funkcję dla sprzężenia zwrotnegosilnika w 4-30 Funk. utraty sprzęż. zwrt.. Wyregulowaćpasmo błędu wyszukiwania w 4-35 Błąd wyszukiwania i4-37 Rozp./zatrz. błędu wyszuk..
Ostrzeżenia i alarmy Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 63
8 8

ALARM 79, Nieprawidłowa konfiguracja sekcji mocyKarta skalująca ma niewłaściwy numer lub nie jest zainsta-lowana Oprócz tego, nie można było zainstalować złączaMK102 na karcie mocy.
ALARM 80, Urządzenie sprowadzona do wartościdomyślnychUstawienia parametru sprowadzone do wartości domyślnejpo ręcznym resecie. Zresetować urządzenie, aby usunąćalarm.
ALARM 81, Uszkodzenie CSIVPlik CSIV ma błędy składniowe.
ALARM 82, Błąd parametru CSIVCSIV nie zainicjowało parametru.
ALARM 83, Błędna kombinacja opcjiZainstalowane opcje nie mogą pracować ze sobą.
ALARM 84, Brak opcji bezpieczeństwaOpcja bezpieczeństwa została usunięta bez wykonaniaogólnego resetu. Ponownie podłączyć opcję bezpie-czeństwa.
ALARM 88, Wykrywanie opcjiWykryto zmianę w rozkładzie opcji. Alarm ten występujegdy 14-89 Option Detection jest nastawiony na [0]Konfiguracja zatrzaśnięta, lecz rozkład opcji ulegnie zmianiez jakiegoś powodu. Należy włączyć zmianę rozkładu opcjiw 14-89 Option Detection, zanim zmiana ta zostaniezatwierdzona. Jeżeli zmiana konfiguracji nie jestzatwierdzone, można jedynie zresetować Alarm 88(Wyłączenie awaryjne z blokadą) gdy konfiguracja opcjizostanie przywrócona do stanu pierwotnego/poprawiona.
ALARM 89, Ślizganie hamulca mechanicznegoMonitor zwolnienia hamulca wykrył, że prędkość obrotowasilnika przekracza 10 obr./min.
ALARM 90, Monitor sprzężenia zwrotnegoSprawdzić połączenie z opcją enkodera/przelicznika i wmiarę potrzeb wymienić MCB 102 lub MCB 103.
ALARM 91, Błędne ustawienia wejścia analogowego 54Przełącznik S202 musi zostać ustawiony w pozycji OFF(wejście napięciowe), gdy czujnik KTY jest podłączony dowejścia analogowego terminalu 54.
ALARM 92, Brak przepływuW układzie wykryto stan polegający na braku przepływu.22-23 Funkcja braku przepływu ustawiono na wywołaniealarmu. Usunąć usterki z układu, a następnie zresetowaćprzetwornica częstotliwości.
ALARM 93, Suchobieg pompyBrak przepływu w układzie podczas pracy przetwornicaczęstotliwości z dużą prędkością może oznaczać suchobiegpompy. 22-26 Funkcja "suchobiegu" pompy ustawiono nawywołanie alarmu. Usunąć usterki z układu, a następniezresetować przetwornica częstotliwości.
ALARM 94, Funkcja End of CurveSprzężenie pozostaje poniżej wartości zadanej. Może towskazywać na wycieki w układzie rur. 22-50 Funkcja "end ofcurve" ustawiono na wywoływanie alarmu. Usunąć usterki zukładu, a następnie zresetować przetwornica częstotliwości.
ALARM 95, Zerwany pasMoment obrotowy jest poniżej ograniczenia momentuustawionego dla braku obciążenia, co wskazuje na zerwanypas. 22-60 Funkcja dla zerwanego pasa ustawiono nawywołanie alarmu. Usunąć usterki z układu, a następniezresetować przetwornica częstotliwości.
ALARM 96, Start opóźnionyUruchomienie silnika zostało opóźnione ze względu nazabezpieczenie krótkiego cyklu. Włączono 22-76 Odstępmiędzy rozruchami. Usunąć usterki z układu, a następniezresetować przetwornica częstotliwości.
OSTRZEŻENIE 97, Stop opóźnionyZatrzymanie silnika zostało opóźnione ze względu nadziałanie zabezpieczenia krótkiego cyklu. Włączono22-76 Odstęp między rozruchami. Usunąć usterki z układu, anastępnie zresetować przetwornica częstotliwości.
OSTRZEŻENIE 98, Błąd zegaraNie ustawiono czasu lub awarii uległ zegar RTC.Zresetować zegar w 0-70 Data i czas.
OSTRZEŻENIE 163, Ostrz.ogr.krzyw. ATEX ETROsiągnięto ograniczenie alarmu krzywej prądu znamio-nowego ATEX ETR. Ostrzeżenie jest włączane przy 83% iwyłączane przy 65% dopuszczalnego przeciążeniatermicznego.
ALARM 164, Al.ogr.krzyw. ATEX ETRPrzekroczono dopuszczalną wartość przeciążeniatermicznego ATEX ETR.
OSTRZEŻENIE 165, Ostrz.ogr.cz. ATEX ETRprzetwornica częstotliwości pracuje ponad 50 sek. zczęstotliwością niższą od dopuszczalnej wartościminimalnej częstotliwości (1-98 ATEX ETR interpol. pointsfreq. [0]).
ALARM 166, Al.ogr.cz. ATEX ETRprzetwornica częstotliwości pracowała przez ponad 60 sek.(w okresie 600 sekund) poniżej dopuszczalnej wartościminimalnej częstotliwości (1-98 ATEX ETR interpol. pointsfreq. [0]).
ALARM 243, IGBT hamulcaTen alarm dotyczy tylko przetwornic z ramami F. Jest onrównoważny alarmowi 27. Wartość podana w rejestrzealarmów oznacza moduł mocy, który spowodował alarm.
ALARM 244, Temperatura radiatoraTen alarm dotyczy wyłącznie przetwornic z ramą F. Jest onrównoważny alarmowi 29. Wartość podana w rejestrzealarmów oznacza moduł mocy, który spowodował alarm.
ALARM 245, Czujnik radiatoraTen alarm dotyczy wyłącznie przetwornic z ramą F. Jest onrównoważny alarmowi 39. Wartość podana w rejestrzealarmów oznacza moduł mocy, który spowodował alarm:
Ostrzeżenia i alarmy Dokumentacja techniczno-ruchowa VLT® AutomationDrive
64 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
88
1 = moduł falownika najbardziej na lewo.
2 = środkowy moduł falownika w przetwornicaczęstotliwości F2 lub F4.
2 = prawy moduł falownika w przetwornicaczęstotliwości F1 lub F3.
3 = prawy moduł falownika w przetwornicyprzetwornica częstotliwości F2 lub F4.
5 = moduł prostownika.
ALARM 246, Zasilanie karty mocyTen alarm dotyczy wyłącznie przetwornica częstotliwości zramą F. Jest on równoważny alarmowi 46. Wartość podanaw rejestrze alarmów oznacza moduł mocy, któryspowodował alarm:
1 = moduł falownika najbardziej na lewo.
2 = środkowy moduł falownika w przetwornicaczęstotliwości F2 lub F4.
2 = prawy moduł falownika w przetwornicaczęstotliwości F1 lub F3.
3 = prawy moduł falownika w przetwornicaczęstotliwości F2 lub F4.
5 = moduł prostownika.
ALARM 69, Przegrzanie karty mocyPrzegrzanie karty mocyTen alarm dotyczy wyłącznie przetwornica częstotliwości zramą F. Jest on równoważny alarmowi 69. Wartość podanaw rejestrze alarmów oznacza moduł mocy, któryspowodował alarm:
1 = moduł falownika najbardziej na lewo.
2 = środkowy moduł falownika w przetwornicaczęstotliwości F2 lub F4.
2 = prawy moduł falownika w przetwornicaczęstotliwości F1 lub F3.
3 = prawy moduł falownika w przetwornicaczęstotliwości F2 lub F4.
5 = moduł prostownika.
ALARM 248, Nieprawidłowa konfiguracja sekcji mocyTen alarm dotyczy wyłącznie przetwornic z ramą F. Jest onrównoważny alarmowi 79. Wartość podana w rejestrzealarmów oznacza moduł mocy, który spowodował alarm:
1 = moduł falownika najbardziej na lewo.
2 = środkowy moduł falownika w przetwornicaczęstotliwości F2 lub F4.
2 = prawy moduł falownika w przetwornicyprzetwornica częstotliwości F1 lub F3.
3 = prawy moduł falownika w przetwornicaczęstotliwości F2 lub F4.
5 = moduł prostownika.
OSTRZEŻENIE 249, Niska temperaturaBłąd czujnika IGBT (dotyczy tylko urządzeń o wysokiejmocy).
OSTRZEŻENIE 250, Nowa część zapasowaWymieniono jeden z komponentów przetwornicaczęstotliwości. Należy zresetować przetwornicaczęstotliwości, aby przywrócić normalną pracę.
OSTRZEŻENIE 251, Nowy kod typuWymieniono jeden z komponentów lub kartę mocy izmieniono kod typu. Zresetować urządzenie, aby usunąćostrzeżenie i wznowić normalną pracę.
Ostrzeżenia i alarmy Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 65
8 8

9 Podstawowe informacje o wykrywaniu i usuwaniu usterek
9.1 Rozruch i obsługa
Dalsze informacje w Alarm Log w Tabela 4.2.
Objaw Przypuszczalna przyczyna Test Rozwiązanie
Wyświetlacz jest ciemny /Brak działania
Brak mocy wejściowej See Tabela 3.1. Sprawdź moc wejściową
Brak bezpieczników, bezpiecznikisą rozwarte lub doszło dowyłączenia awaryjnego wyłącznikaróżnicowego
Zapoznać się z zawartymi w tejtabeli informacjami o rozwartychbezpiecznikach i wyłączonychawaryjnie wyłącznikachróżnicowych.
Postępować zgodnie z przedsta-wionymi zaleceniami.
Brak zasilania LCP Sprawdzić, czy kabel LCP nie jestuszkodzony lub nie ma poluzo-wanego złącza.
Należy wymienić uszkodzony LCPlub kabel złącza.
Zwarcie w napięciu sterowania(zacisk 12 lub 50) lub na zaciskachsterowania
Sprawdzić źródło zasilania 24 Vpodłączone do zacisków od 12/13do 20-39 lub 10 V dla zacisków od50 do 55.
Wykonać poprawnie połączenia zzaciskami.
Niewłaściwy LCP (LCP z VLT® 2800lub 5000/6000/8000/ FCD bądźFCM)
Używać wyłącznie LCP 101 (nr kat.130B1124) lub LCP 102 (nr kat.130B1107).
Źle ustawiony kontrast Nacisnąć [Status] i strzałki góra/dółw celu wyregulowania kontrastu.
Wyświetlacz (LCP) jest wadliwy Sprawdzić za pomocą innego LCP. Należy wymienić uszkodzony LCPlub kabel złącza.
Usterka wewnętrznego źródłanapięcia lub uszkodzenie SMPS
Skontaktować się z dostawcą.
Migotanie wyświetlacza
Przeciążenie zasilania (SMPS) zpowodu niepoprawnegookablowania sterowania lub wadyw przetwornica częstotliwości
W celu wykluczenia problemów zokablowaniem sterowania należyrozłączyć wszystkie kablesterowania, odpinając kostkizacisków.
Jeżeli wyświetlacz jestpodświetlony, problem leży wokablowaniu sterowania. Należysprawdzić okablowanie pod kątemzwarć i nieprawidłowych połączeń.Jeżeli wyświetlacz nadal gaśnie lubmigocze, należy postępowaćzgodnie z procedurą dla brakuekranu/wyświetlacza.
Podstawowe informacje o wyk... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
66 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
99
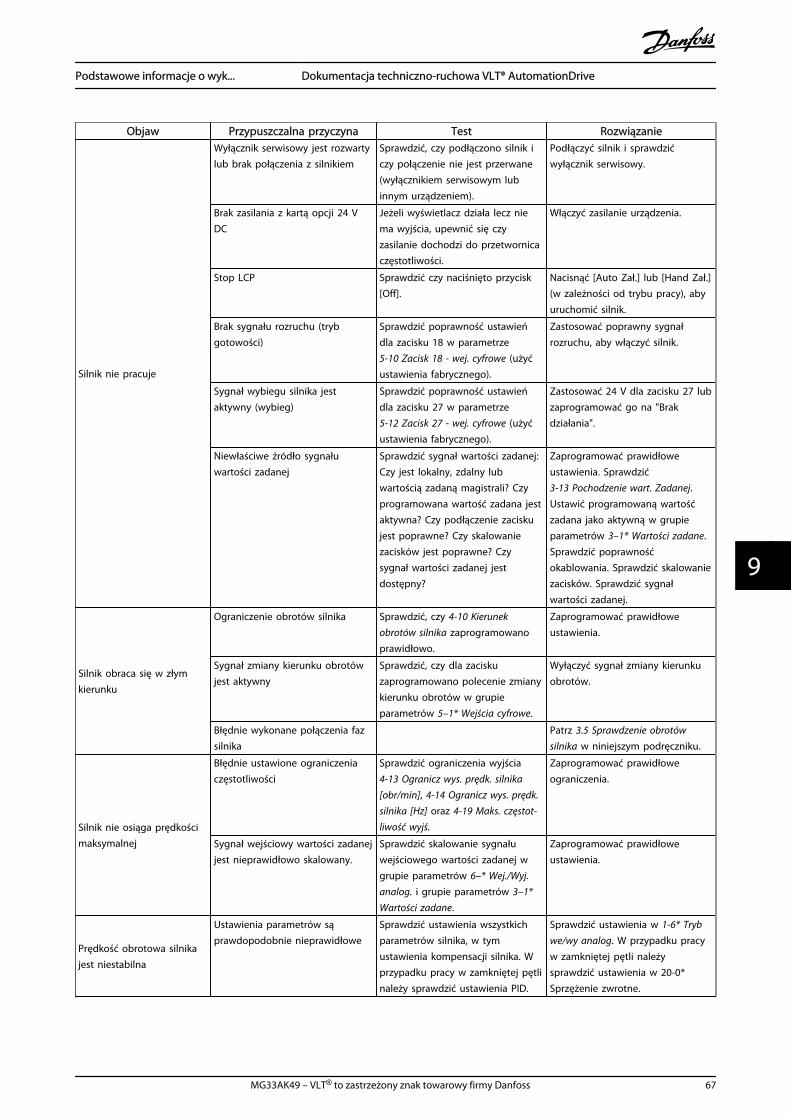
Objaw Przypuszczalna przyczyna Test Rozwiązanie
Silnik nie pracuje
Wyłącznik serwisowy jest rozwartylub brak połączenia z silnikiem
Sprawdzić, czy podłączono silnik iczy połączenie nie jest przerwane(wyłącznikiem serwisowym lubinnym urządzeniem).
Podłączyć silnik i sprawdzićwyłącznik serwisowy.
Brak zasilania z kartą opcji 24 VDC
Jeżeli wyświetlacz działa lecz niema wyjścia, upewnić się czyzasilanie dochodzi do przetwornicaczęstotliwości.
Włączyć zasilanie urządzenia.
Stop LCP Sprawdzić czy naciśnięto przycisk[Off].
Nacisnąć [Auto Zał.] lub [Hand Zał.](w zależności od trybu pracy), abyuruchomić silnik.
Brak sygnału rozruchu (trybgotowości)
Sprawdzić poprawność ustawieńdla zacisku 18 w parametrze5-10 Zacisk 18 - wej. cyfrowe (użyćustawienia fabrycznego).
Zastosować poprawny sygnałrozruchu, aby włączyć silnik.
Sygnał wybiegu silnika jestaktywny (wybieg)
Sprawdzić poprawność ustawieńdla zacisku 27 w parametrze5-12 Zacisk 27 - wej. cyfrowe (użyćustawienia fabrycznego).
Zastosować 24 V dla zacisku 27 lubzaprogramować go na "Brakdziałania".
Niewłaściwe źródło sygnałuwartości zadanej
Sprawdzić sygnał wartości zadanej:Czy jest lokalny, zdalny lubwartością zadaną magistrali? Czyprogramowana wartość zadana jestaktywna? Czy podłączenie zaciskujest poprawne? Czy skalowaniezacisków jest poprawne? Czysygnał wartości zadanej jestdostępny?
Zaprogramować prawidłoweustawienia. Sprawdzić3-13 Pochodzenie wart. Zadanej.Ustawić programowaną wartośćzadana jako aktywną w grupieparametrów 3–1* Wartości zadane.Sprawdzić poprawnośćokablowania. Sprawdzić skalowaniezacisków. Sprawdzić sygnałwartości zadanej.
Silnik obraca się w złymkierunku
Ograniczenie obrotów silnika Sprawdzić, czy 4-10 Kierunekobrotów silnika zaprogramowanoprawidłowo.
Zaprogramować prawidłoweustawienia.
Sygnał zmiany kierunku obrotówjest aktywny
Sprawdzić, czy dla zaciskuzaprogramowano polecenie zmianykierunku obrotów w grupieparametrów 5–1* Wejścia cyfrowe.
Wyłączyć sygnał zmiany kierunkuobrotów.
Błędnie wykonane połączenia fazsilnika
Patrz 3.5 Sprawdzenie obrotówsilnika w niniejszym podręczniku.
Silnik nie osiąga prędkościmaksymalnej
Błędnie ustawione ograniczeniaczęstotliwości
Sprawdzić ograniczenia wyjścia4-13 Ogranicz wys. prędk. silnika[obr/min], 4-14 Ogranicz wys. prędk.silnika [Hz] oraz 4-19 Maks. częstot-liwość wyjś.
Zaprogramować prawidłoweograniczenia.
Sygnał wejściowy wartości zadanejjest nieprawidłowo skalowany.
Sprawdzić skalowanie sygnałuwejściowego wartości zadanej wgrupie parametrów 6–* Wej./Wyj.analog. i grupie parametrów 3–1*Wartości zadane.
Zaprogramować prawidłoweustawienia.
Prędkość obrotowa silnikajest niestabilna
Ustawienia parametrów sąprawdopodobnie nieprawidłowe
Sprawdzić ustawienia wszystkichparametrów silnika, w tymustawienia kompensacji silnika. Wprzypadku pracy w zamkniętej pętlinależy sprawdzić ustawienia PID.
Sprawdzić ustawienia w 1-6* Trybwe/wy analog. W przypadku pracyw zamkniętej pętli należysprawdzić ustawienia w 20-0*Sprzężenie zwrotne.
Podstawowe informacje o wyk... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 67
9 9

Objaw Przypuszczalna przyczyna Test Rozwiązanie
Silnik ciężko pracujePrawdopodobnie doszło donadmiernego namagnesowania
Sprawdzić prawidłowość ustawieńwszystkich parametrów silnika.
Sprawdzić ustawienia silnika w 1-2*Dane silnika, 1-3* Zaaw. dane siln. i1-5* Nast niez od obc.
Silnik nie hamuje
Ustawienia parametrów hamulcasą prawdopodobnie niepra-widłowe. Czas zwalniania jestprawdopodobnie zbyt krótki.down
Sprawdzić parametry hamulca.Sprawdzić ustawienia czasurozpędzenia/zatrzymania.
Sprawdzić grupę parametrów 2–0*Hamulec DC i 3–0* Ogr. wart. zad.
Otwarte bezpiecznikizasilania lub nastąpiłowyłączenie wyłącznikaróżnicowego
Zwarcie międzyfazowe Na silniku lub panelu doszło dozwarcia międzyfazowego.Sprawdzić silnik i panel naobecność zwarć między fazami.
Wyeliminować wszelkie zwarcia.
Przeciążenie silnika Silnik jest przeciążony w tejaplikacji.
Przeprowadzić próbę rozruchu iupewnić się, że wartości prądusilnika odpowiadają danymtechnicznym. Jeżeli prąd silnikaprzekracza wartość prądu pełnegoobciążenia, zmniejszyć obciążeniesilnika. Zweryfikować danetechniczne aplikacji.
Obluzowane złącza Przeprowadzić proceduręsprawdzenia przed rozruchem podkątem obluzowanych połączeń.
Dokręcić obluzowane złącza.
Asymetria zasilaniaprzekracza wartość 3%
Problem z zasilaniem (patrz opis:Alarm 4, Utrata fazy zasilania)
Przemieścić przewody zasilaniawejściowego o jedno miejsce naprzetwornicy: A do B, B do C, C doA.
Jeżeli noga asymetrycznaprzemieszcza się z przewodami,problem leży po stronie zasilania.Sprawdzić zasilanie.
Problem z przetwornicaczęstotliwości
Przemieścić przewody zasilaniawejściowego o jedno miejsce naprzetwornica częstotliwości: A do B,B do C, C do A.
Jeżeli noga asymetryczna pozostajena tym samym zaciskuwejściowym, problem tkwi wurządzeniu. Skontaktować się zdostawcą.
Asymetria prądu silnikaprzekracza 3%
Problem z silnikiem lubuzwojeniem silnika
Zmienić położenie wyjściowychprzewodów silnika o jedno miejsce:U do V, V do W, W do U.
Jeżeli noga asymetryczna zmieniasię wraz z położeniem przewodów,problem leży po stronie silnika lubjego okablowania. Sprawdzić silniki jego okablowanie.
Problem z przetwornicą Zmienić położenie wyjściowychprzewodów silnika o jedno miejsce:U do V, V do W, W do U.
Jeżeli noga asymetryczna pozostajena tym samym zaciskuwyjściowym, problem tkwi wurządzeniu. Skontaktować się zdostawcą.
Tabela 9.1
Podstawowe informacje o wyk... Dokumentacja techniczno-ruchowa VLT® AutomationDrive
68 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
99

10 Dane techniczne
10.1 Powiązane z mocą specyfikacje
Zasilanie 3 x 200 - 240 V AC
FC 301/FC 302 PK25 PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P3K7
Typowa moc na wale [kW] 0,25 0,37 0,55 0,75 1,1 1,5 2,2 3 3,7
Obudowa IP20/IP21 A2 A2 A2 A2 A2 A2 A2 A3 A3
Obudowa IP 20 (tylko FC 301) A1 A1 A1 A1 A1 A1 - - -
Obudowa IP55, 66 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
Prąd wyjściowy
Ciągły(3 x 200-240 V) [A]
1,8 2,4 3,5 4,6 6,6 7,5 10,6 12,5 16,7
Przerywany(3 x 200-240 V) [A]
2,9 3,8 5,6 7,4 10,6 12,0 17,0 20,0 26,7
CiągłykVA (208 V AC) [kVA]
0,65 0,86 1,26 1,66 2,38 2,70 3,82 4,50 6,00
Maks. prąd wejściowy
Ciągły(3 x 200-240 V) [A]
1,6 2,2 3,2 4,1 5,9 6,8 9,5 11,3 15,0
Przerywany(3 x 200-240 V) [A]
2,6 3,5 5,1 6,6 9,4 10,9 15,2 18,1 24,0
Dodatkowa specyfikacja
IP20, 21 maks. przekrój kabla5)
(zasilania, silnika, hamulca i
podziału obciążenia) [mm2
(AWG )]2)
4,4,4 (12,12,12)(min. 0,2(24))
IP 55, 66 maks. przekrój kabla5)
(zasilania, silnika, hamulca i
podziału obciążenia; mm2 [AWG])
4,4,4 (12,12,12)
Maks. przekrój poprzeczny5)zrozłączeniem
6,4,4 (10,12,12)
Szacowane straty mocyprzy maks. obciążeniu
znamionowym [W] 4)
21 29 42 54 63 82 116 155 185
Ciężar, obudowa IP20 [kg] 4,7 4,7 4,8 4,8 4,9 4,9 4,9 6,6 6,6
A1 (IP20) 2,7 2,7 2,7 2,7 2,7 2,7 - - -
A5 (IP55, 66) 13,5 13,5 13,5 13,5 13,5 13,5 13,5 13,5 13,5
Sprawność 4) 0,94 0,94 0,95 0,95 0,96 0,96 0,96 0,96 0,96
0,25 – 3,7 kW dostępna tylko jako duże przetężenie 160%.
Tabela 10.1
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 69
10 10

Zasilanie 3 x 200 - 240 V AC
FC 301/FC 302 P5K5 P7K5 P11K
Wysokie/normalne obciążenie1) HO NO HO NO HO NO
Typowa moc na wale [kW] 5,5 7,5 7,5 11 11 15
Obudowa IP20 B3 B3 B4
Obudowa IP21 B1 B1 B2
Obudowa IP55, 66 B1 B1 B2
Prąd wyjściowy
Ciągły(3 x 200–240 V) [A]
24,2 30,8 30,8 46,2 46,2 59,4
Przerywany(przetężenie 60 sek.)(3 x 200-240 V) [A]
38,7 33,9 49,3 50,8 73,9 65,3
CiągłykVA (208 V AC) [kVA]
8,7 11,1 11,1 16,6 16,6 21,4
Maks. prąd wejściowy
Ciągły(3 x 200-240 V) [A]
22 28 28 42 42 54
Przerywany(przetężenie 60 sek.)(3 x 200-240 V) [A]
35,2 30,8 44,8 46,2 67,2 59,4
Dodatkowa specyfikacja
IP 21 maks. przekrój kabla 5)
(sieciowy, hamulca, podziału
obciążenia; mm2 [AWG])2)
16,10, 16 (6,8,6) 16,10, 16 (6,8,6) 35,-,- (2,-,-)
IP 21 maks. przekrój poprzeczny
kabla5) (silnik; mm2 [AWG])2)10,10,- (8,8,-) 10,10,- (8,8,-) 35,25,25 (2,4,4)
IP 20 maks. przekrój poprzeczny
kabla5) (zasilania, hamulca, silnika ipodziału obciążenia)
10,10,- (8,8,-) 10,10,- (8,8,-) 35,-,- (2,-,-)
Maks. przekrój poprzeczny kabla z
rozłącznikiem (mm2 [AWG])2)16,10,10 (6,8,8)
Szacowane straty mocyprzy maks. obciążeniu znamionowym
[W] 4)
239 310 371 514 463 602
Ciężar,obudowa IP21, IP55, 66 [kg]
23 23 27
Sprawność4) 0,964 0,959 0,964
Tabela 10.2
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
70 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
1010

Zasilanie 3 x 200 - 240 V ACFC 301/FC 302 P15K P18K P22K P30K P37KWysokie/normalne obciążenie1) HO NO HO NO HO NO HO NO HO NO
Typowa moc na wale [kW] 15 18,5 18,5 22 22 30 30 37 37 45Obudowa IP20 B4 C3 C3 C4 C4Obudowa IP21 C1 C1 C1 C1 C1Obudowa IP55, IP66 C1 C1 C1 C2 C2
Prąd wyjściowyCiągły(3 x 200–240 V) [A] 59,4 74,8 74,8 88 88 115 115 143 143 170
Przerywany(przetężenie 60 sek.)(3 x 200-240 V) [A]
89,1 82,3 112 96,8 132 127 173 157 215 187
CiągłykVA (208 V AC) [kVA] 21,4 26,9 26,9 31,7 31,7 41,4 41,4 51,5 51,5 61,2
Maks. prąd wejściowyCiągły(3 x 200–240 V) [A] 54 68 68 80 80 104 104 130 130 154
Przerywany(przetężenie 60 sek.)(3 x 200-240 V) [A]
81 74,8 102 88 120 114 156 143 195 169
Dodatkowa specyfikacja IP 20 maks. przekrój poprzeczny
kabla5) (zasilania, hamulca,silnika i podziału obciążenia)
35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
IP21, IP55, IP66 maks. przekrójkabla5) (zasilania, silnika) [mm2
(AWG)] 2)50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
IP21, IP55, IP66 maks. przekrójkabla5) ( hamulca, podziałuobciążenia) [mm2 (AWG)] 2)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
Maks. przekrój kabla z rozłącz-nikiem zasilania [mm2 (AWG2))]
50, 35, 35 (1, 2, 2) 95, 70, 70(3/0, 2/0, 2/0)
185, 150, 120(350 MCM, 300 MCM,
4/0)Szacowane straty mocyprzy maks. obciążeniuznamionowym [W] 4)
624 737 740 845 874 1140 1143 1353 1400 1636
Ciężar,obudowa IP21, 55/66 [kg] 45 45 45 65 65
Sprawność4) 0,96 0,97 0,97 0,97 0,97
Tabela 10.3
Patrz maksymalne wartości znamionowe bezpieczników w 10.3.1 Bezpieczniki
1) Wysokie przeciążenie = 160% momentu obrotowego w ciągu 60 sek., Normalne przeciążenie = 110% momentu obrotowego w ciągu60 sek.
2) Amerykańska miara kabli.
3) Zmierzono używając 5 m ekranowanych kabli silnika przy obciążeniu znamionowym i częstotliwości znamionowej.
4) Standardowa utrata mocy występuje w warunkach nominalnego obciążenia i powinna wynosić +/-15% (zakres tolerancji związanyjest z rożnym napięciem i stanem kabli).Wartości opierają się na standardowej sprawności silnika (granica eff2/eff3). Mniej sprawne silniki przyczyniają się również do stratmocy w przetwornica częstotliwości i odwrotnie.Jeżeli częstotliwość przełączania jest zwiększana względem domyślnych ustawień, utraty mocy mogą znacząco wzrosnąć.LCP i typowe zużycie mocy karty sterowania są załączone. Dodatkowe opcje i obciążenie użytkownika może spowodować do 30Wdalszych strat. (Chociaż typowa utrata to jedynie 4W dla każdej w pełni obciążonej karty sterującej lub opcji na gnieździe A lubgnieździe B).Pomimo, że pomiary są wykonywane przez najnowszy sprzęt, należy dopuścić ich pewną niedokładność (+/-5%).
5) Trzy wartości określające maksymalny przekrój dotyczą odpowiednio: przewodu jednożyłowego, przewodu elastycznego i przewoduelastycznego z osłoną izolującą.
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 71
10 10

Zasilanie 3 x 380 - 500 V AC (FC 302), 3 x 380–480 V AC (FC 301)
PK 37 PK 55 PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
FC 301/FC 302Typowa moc na wale [kW]
0,37 0,55 0,75 1,1 1,5 2,2 3 4 5,5 7,5
Obudowa IP20/IP21 A2 A2 A2 A2 A2 A2 A2 A2 A3 A3
Obudowa IP20 (tylko FC 301) A1 A1 A1 A1 A1
Obudowa IP55, 66 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
Prąd wyjściowyDuże przetężenie 160% na 1 minutę
Moc na wale [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3 4 5,5 7,5
Ciągły(3 x 380-440 V) [A]
1,3 1,8 2,4 3 4,1 5,6 7,2 10 13 16
Przerywany(3 x 380-440 V) [A]
2,1 2,9 3,8 4,8 6,6 9,0 11,5 16 20,8 25,6
Ciągły(3 x 441-500 V) [A]
1,2 1,6 2,1 2,7 3,4 4,8 6,3 8,2 11 14,5
Przerywany(3 x 441-500 V) [A]
1,9 2,6 3,4 4,3 5,4 7,7 10,1 13,1 17,6 23,2
Ciągły kVA(400 V AC) [kVA]
0,9 1,3 1,7 2,1 2,8 3,9 5,0 6,9 9,0 11,0
Ciągły kVA(460 V AC) [kVA]
0,9 1,3 1,7 2,4 2,7 3,8 5,0 6,5 8,8 11,6
Maks. prąd wejściowy
Ciągły(3 x 380-440 V) [A]
1,2 1,6 2,2 2,7 3,7 5,0 6,5 9,0 11,7 14,4
Przerywany(3 x 380-440 V) [A]
1,9 2,6 3,5 4,3 5,9 8,0 10,4 14,4 18,7 23,0
Ciągły(3 x 441-500 V) [A]
1,0 1,4 1,9 2,7 3,1 4,3 5,7 7,4 9,9 13,0
Przerywany(3 x 441-500 V) [A]
1,6 2,2 3,0 4,3 5,0 6,9 9,1 11,8 15,8 20,8
Dodatkowa specyfikacja
IP20, 21 maks. przekrój
kabla5) (zasilania, silnika,hamulca i podziału
obciążenia) [mm2 (AWG )]2)
4,4,4 (12,12,12)(min. 0,2(24))
IP 55, 66 maks. przekrój
kabla5) (zasilania, silnika,hamulca i podziału
obciążenia; mm2 [AWG])
4,4,4 (12,12,12)
Maks. przekrój
poprzeczny5)z rozłączeniem6,4,4 (10,12,12)
Szacowane straty mocyprzy maks. obciążeniu
znamionowym [W] 4)
35 42 46 58 62 88 116 124 187 255
Ciężar,obudowa IP20
4,7 4,7 4,8 4,8 4,9 4,9 4,9 4,9 6,6 6,6
Obudowa IP55, 66 13,5 13,5 13,5 13,5 13,5 13,5 13,5 13,5 14,2 14,2
Sprawność4) 0,93 0,95 0,96 0,96 0,97 0,97 0,97 0,97 0,97 0,97
0,37 – 7,5 kW dostępna tylko jako duże przetężenie 160%.
Tabela 10.4
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
72 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
1010

Zasilanie 3 x 380–500 V AC (FC 302), 3 x 380–480 V AC (FC 301)
FC 301/FC 302 P11K P15K P18K P22K
Wysokie/normalne obciążenie1) HO NO HO NO HO NO HO NO
Typowa moc na wale [kW] 11 15 15 18,5 18,5 22,0 22,0 30,0
Obudowa IP20 B3 B3 B4 B4
Obudowa IP21 B1 B1 B2 B2
Obudowa IP55, IP66 B1 B1 B2 B2
Prąd wyjściowy
Ciągły(3 x 380-440 V) [A]
24 32 32 37,5 37,5 44 44 61
Przerywany (przetężenie 60sek.)(3 x 380-440 V) [A]
38,4 35,2 51,2 41,3 60 48,4 70,4 67,1
Ciągły(3 x 441-500 V) [A]
21 27 27 34 34 40 40 52
Przerywany (przetężenie 60sek.)(3 x 441–500 V) [A]
33,6 29,7 43,2 37,4 54,4 44 64 57,2
Ciągły kVA(400 V AC) [kVA]
16,6 22,2 22,2 26 26 30,5 30,5 42,3
Ciągły kVA(460 V AC) [kVA]
21,5 27,1 31,9 41,4
Maks. prąd wejściowy
Ciągły(3 x 380-440 V) [A]
22 29 29 34 34 40 40 55
Przerywany (przetężenie 60sek.)(3 x 380-440 V) [A]
35,2 31,9 46,4 37,4 54,4 44 64 60,5
Ciągły(3 x 441-500 V) [A]
19 25 25 31 31 36 36 47
Przerywany (przetężenie 60sek.)(3 x 441–500 V) [A]
30,4 27,5 40 34,1 49,6 39,6 57,6 51,7
Dodatkowa specyfikacja
IP21, IP55, IP66 maks.
przekrój kabla5) (sieciowy,hamulca, podziału
obciążenia) [mm2 (AWG)] 2)
16, 10, 16 (6, 8, 6) 16, 10, 16 (6, 8, 6) 35,-,-(2,-,-) 35,-,-(2,-,-)
IP21, IP55, IP66 maks.
przekrój poprzeczny kabla5)
(silnik) [mm2 (AWG)] 2)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4)
IP 20 maks. przekrój
poprzeczny kabla5) (zasilania,hamulca, silnika i podziałuobciążenia)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
Maks. przekrój poprzeczny
kabla z rozłącznikiem (mm2
[AWG])2)
16, 10, 10 (6, 8, 8)
Szacowane straty mocyprzy maks. obciążeniu
znamionowym [W] 4)
291 392 379 465 444 525 547 739
Ciężar, obudowa IP20 [kg] 12 12 23,5 23,5
Ciężar,obudowa IP21, IP55, 66 [kg]
23 23 27 27
Sprawność4) 0,98 0,98 0,98 0,98
Tabela 10.5
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 73
10 10

Zasilanie 3 x 380–500 V AC (FC 302), 3 x 380–480 V AC (FC 301)FC 301/FC 302 P30K P37K P45K P55K P75KWysokie/normalne obciążenie1) HO NO HO NO HO NO HO NO HO NO
Typowa moc na wale [kW] 30 37 37 45 45 55 55 75 75 90Obudowa IP20 B4 C3 C3 C4 C4Obudowa IP21 C1 C1 C1 C2 C2Obudowa IP55, IP66 C1 C1 C1 C2 C2
Prąd wyjściowyCiągły(3 x 380-440 V) [A] 61 73 73 90 90 106 106 147 147 177
Przerywany (przetężenie 60sek.)(3x 380-440 V) [A]
91,5 80,3 110 99 135 117 159 162 221 195
Ciągły(3 x 441-500 V) [A] 52 65 65 80 80 105 105 130 130 160
Przerywany (przetężenie 60sek.)(3 x 441–500 V) [A]
78 71,5 97,5 88 120 116 158 143 195 176
Ciągły kVA(400 V AC) [kVA] 42,3 50,6 50,6 62,4 62,4 73,4 73,4 102 102 123
Ciągły kVA(460 V AC) [kVA] 51,8 63,7 83,7 104 128
Maks. prąd wejściowyCiągły(3 x 380-440 V) [A] 55 66 66 82 82 96 96 133 133 161
Przerywany (przetężenie 60sek.)(3x 380-440 V) [A]
82,5 72,6 99 90,2 123 106 144 146 200 177
Ciągły(3 x 441-500 V) [A] 47 59 59 73 73 95 95 118 118 145
Przerywany (przetężenie 60sek.)(3 x 441–500 V) [A]
70,5 64,9 88,5 80,3 110 105 143 130 177 160
Dodatkowa specyfikacja IP 20 maks. przekrój
poprzeczny kabla5)
(zasilania i silnika)35 (2) 50 (1) 50 (1) 150 (300 mcm) 150 (300 mcm)
IP 20 maks. przekrójpoprzeczny kabla5)
(hamulca i podziałuobciążenia)
35 (2) 50 (1) 50 (1) 95 (4/0) 95 (4/0)
IP21, IP55, IP66 maks.przekrój kabla5) (zasilania,silnika) [mm2 (AWG)] 2)
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
IP21, IP55, IP66 maks.przekrój kabla5) ( hamulca,podziału obciążenia) [mm2
(AWG)] 2)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
Maks. przekrój kabla zrozłącznikiem zasilania[mm2 (AWG2))]
50, 35, 35(1, 2, 2)
95, 70, 70(3/0, 2/0, 2/0)
185, 150, 120(350 MCM, 300 MCM,
4/0)Szacowane straty mocyprzy maks. obciążeniuznamionowym [W] 4)
570 698 697 843 891 1083 1022 1384 1232 1474
Ciężar,obudowa IP21, IP55, IP66[kg]
45 45 45 65 65
Sprawność4) 0,98 0,98 0,98 0,98 0,99
Tabela 10.6
Patrz maksymalne wartości znamionowe bezpieczników w 10.3.1 Bezpieczniki
1) Wysokie przeciążenie = 160% momentu obrotowego w ciągu 60 sek., normalne przeciążenie = 110% momentu obrotowego w ciągu60 sek.
2) Amerykańska miara kabli.
3) Zmierzono używając 5 m ekranowanych kabli silnika przy obciążeniu znamionowym i częstotliwości znamionowej.
4) Standardowa utrata mocy występuje w warunkach nominalnego obciążenia i powinna wynosić +/-15% (zakres tolerancji związanyjest z rożnym napięciem i stanem kabli).
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
74 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
1010

Wartości opierają się na standardowej sprawności silnika (granica eff2/eff3). Mniej sprawne silniki przyczyniają się również do stratmocy w przetwornica częstotliwości i odwrotnie.Jeżeli częstotliwość przełączania jest zwiększana względem domyślnych ustawień, utraty mocy mogą znacząco wzrosnąć.LCP i typowe zużycie mocy karty sterowania są załączone. Dodatkowe opcje i obciążenie użytkownika może spowodować do 30Wdalszych strat. (Chociaż typowa utrata to jedynie 4W dla każdej w pełni obciążonej karty sterującej lub opcji na gnieździe A lubgnieździe B).Pomimo, że pomiary są wykonywane przez najnowszy sprzęt, należy dopuścić ich pewną niedokładność (+/-5%).
5) Trzy wartości określające maksymalny przekrój dotyczą odpowiednio: przewodu jednożyłowego, przewodu elastycznego i przewoduelastycznego z osłoną izolującą.
Zasilanie 3 x 525 - 600 V AC (tylko FC 302)
FC 302 PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Typowa moc na wale [kW] 0,75 1,1 1,5 2,2 3 4 5,5 7,5
Obudowa IP20, 21 A3 A3 A3 A3 A3 A3 A3 A3
Obudowa IP55 A5 A5 A5 A5 A5 A5 A5 A5
Prąd wyjściowy
Ciągły(3 x 525-550 V) [A]
1,8 2,6 2,9 4,1 5,2 6,4 9,5 11,5
Przerywany(3 x 525-550 V) [A]
2,9 4,2 4,6 6,6 8,3 10,2 15,2 18,4
Ciągły(3 x 551-600 V) [A]
1,7 2,4 2,7 3,9 4,9 6,1 9,0 11,0
Przerywany(3 x 551-600 V) [A]
2,7 3,8 4,3 6,2 7,8 9,8 14,4 17,6
Ciągły kVA (525 V AC) [kVA] 1,7 2,5 2,8 3,9 5,0 6,1 9,0 11,0
Ciągły kVA (575 V AC) [kVA] 1,7 2,4 2,7 3,9 4,9 6,1 9,0 11,0
Maks. prąd wejściowy
Ciągły(3 x 525-600 V) [A]
1,7 2,4 2,7 4,1 5,2 5,8 8,6 10,4
Przerywany(3 x 525-600 V) [A]
2,7 3,8 4,3 6,6 8,3 9,3 13,8 16,6
Dodatkowa specyfikacja
IP20, 21 maks. przekrój kabla5)
(zasilania, silnika, hamulca i podziału
obciążenia) [mm2 (AWG )]2)
4,4,4 (12,12,12)(min. 0,2(24))
IP 55, 66 maks. przekrój kabla5)
(zasilania, silnika, hamulca i podziału
obciążenia; mm2 [AWG])
4,4,4 (12,12,12)
Maks. przekrój poprzeczny5)zrozłączeniem
6,4,4 (10,12,12)
Szacowane straty mocyprzy maks. obciążeniu znamionowym
[W] 4)
35 50 65 92 122 145 195 261
Ciężar,obudowa IP20 [kg]
6,5 6,5 6,5 6,5 6,5 6,5 6,6 6,6
Ciężar,obudowa IP55 [kg]
13,5 13,5 13,5 13,5 13,5 13,5 14,2 14,2
Sprawność 4) 0,97 0,97 0,97 0,97 0,97 0,97 0,97 0,97
Tabela 10.7
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 75
10 10

Zasilanie 3 x 525 - 600 V AC
FC 302 P11K P15K P18K P22K P30K
Wysokie/normalne obciążenie1) HO NO HO NO HO NO HO NO HO NO
Typowa moc na wale [kW] 11 15 15 18,5 18,5 22 22 30 30 37
Obudowa IP21, IP55,IP66
B1 B1 B2 B2 C1
Obudowa IP20 B3 B3 B4 B4 B4
Prąd wyjściowy
Ciągły(3 x 525-550 V) [A]
19 23 23 28 28 36 36 43 43 54
Przerywany(3 x 525-550 V) [A]
30 25 37 31 45 40 58 47 65 59
Ciągły(3 x 525-600 V) [A]
18 22 22 27 27 34 34 41 41 52
Przerywany(3 x 525-600 V) [A]
29 24 35 30 43 37 54 45 62 57
Ciągły kVA (550 V AC)[kVA]
18,1 21,9 21,9 26,7 26,7 34,3 34,3 41,0 41,0 51,4
Ciągły kVA (575 V AC)[kVA]
17,9 21,9 21,9 26,9 26,9 33,9 33,9 40,8 40,8 51,8
Maks. prąd wejściowy
Ciągłyprzy 550 V [A]
17,2 20,9 20,9 25,4 25,4 32,7 32,7 39 39 49
Przerywanyprzy 550 V [A]
28 23 33 28 41 36 52 43 59 54
Ciągłyprzy 575 V [A]
16 20 20 24 24 31 31 37 37 47
Przerywanyprzy 575 V [A]
26 22 32 27 39 34 50 41 56 52
Dodatkowa specyfikacja
IP21, IP55, IP66 maks.
przekrój kabla5)
(sieciowy, hamulca,podziału obciążenia)
[mm2 (AWG)] 2)
16, 10, 10 (6, 8, 8) 16, 10, 10 (6, 8, 8) 35,-,-(2,-,-) 35,-,-(2,-,-) 50,-,- (1,-,-)
IP21, IP55, IP66 maks.przekrój poprzeczny
kabla5) (silnik) [mm2
(AWG)] 2)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4) 50,-,- (1,-,-)
IP 20 maks. przekrój
poprzeczny kabla5)
(zasilania, hamulca,silnika i podziałuobciążenia)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
Maks. przekrójpoprzeczny kabla z
rozłącznikiem (mm2
[AWG])2)
16, 10, 10(6, 8, 8)
50, 35, 35(1,2, 2)
Szacowane straty mocyprzy maks. obciążeniu
znamionowym [W] 4)
225 285 329 700 700
Ciężar,obudowa IP21 [kg]
23 23 27 27 27
Ciężar,obudowa IP20 [kg]
12 12 23,5 23,5 23,5
Sprawność 4) 0,98 0,98 0,98 0,98 0,98
Tabela 10.8
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
76 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
1010

Zasilanie 3 x 525 - 600 V AC
FC 302 P37K P45K P55K P75K
Wysokie/normalne obciążenie* HO NO HO NO HO NO HO NO
Typowa moc na wale [kW] 37 45 45 55 55 75 75 90
Obudowa IP21, IP55, IP66 C1 C1 C1 C2 C2
Obudowa IP20 C3 C3 C3 C4 C4
Prąd wyjściowy
Ciągły(3 x 525–550 V) [A]
54 65 65 87 87 105 105 137
Przerywany(3 x 525-550 V) [A]
81 72 98 96 131 116 158 151
Ciągły(3 x 525-600 V) [A]
52 62 62 83 83 100 100 131
Przerywany(3 x 525-600 V) [A]
78 68 93 91 125 110 150 144
Ciągły kVA (550 V AC) [kVA] 51,4 61,9 61,9 82,9 82,9 100,0 100,0 130,5
Ciągły kVA (575 V AC) [kVA] 51,8 61,7 61,7 82,7 82,7 99,6 99,6 130,5
Maks. prąd wejściowy
Ciągłyprzy 550 V [A]
49 59 59 78,9 78,9 95,3 95,3 124,3
Przerywanyprzy 550 V [A]
74 65 89 87 118 105 143 137
Ciągłyprzy 575 V [A]
47 56 56 75 75 91 91 119
Przerywanyprzy 575 V [A]
70 62 85 83 113 100 137 131
Dodatkowa specyfikacja
IP 20 maks. przekrój
poprzeczny kabla5) (zasilania isilnika)
50 (1) 150 (300 MCM)
IP 20 maks. przekrój
poprzeczny kabla5) (hamulca ipodziału obciążenia)
50 (1) 95 (4/0)
IP21, IP55, IP66 maks. przekrój
kabla5) (zasilania, silnika) [mm2
(AWG)] 2)
50 (1) 150 (300 MCM)
IP21, IP55, IP66 maks. przekrój
kabla5) ( hamulca, podziału
obciążenia) [mm2 (AWG)] 2)
50 (1) 95 (4/0)
Maks. przekrój kabla z rozłącz-
nikiem zasilania [mm2 (AWG2))]
50, 35, 35(1, 2, 2)
95, 70, 70(3/0, 2/0, 2/0)
185, 150, 120(350 MCM, 300 MCM,
4/0)
Szacowane straty mocyprzy maks. obciążeniu
znamionowym [W] 4)
850 1100 1400 1500
Ciężar,obudowa IP20 [kg]
35 35 50 50
Ciężar,obudowa IP21, IP 55 [kg]
45 45 65 65
Sprawność 4) 0,98 0,98 0,98 0,98
Tabela 10.9
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 77
10 10

Zasilanie 3 x 525- 690V AC
FC 302 P11K P15K P18K P22K
Wysokie/normalne obciążenie1) HO NO HO NO HO NO HO NO
Typowa moc na wale przy550 V [kW]
7,5 11 11 15 15 18,5 18,5 22
Typowa moc na wale przy575 V [HP]
11 15 15 20 20 25 25 30
Typowa moc na wale przy690 V [kW]
11 15 15 18,5 18,5 22 22 30
Obudowa IP21, 55 B2 B2 B2 B2
Prąd wyjściowy
Ciągły(3 x 525–550 V) [A]
14 19 19 23 23 28 28 36
Przerywany (przetężenie 60sek.)(3 x 525-550 V) [A]
22,4 20,9 30,4 25,3 36,8 30,8 44,8 39,6
Ciągły(3 x 551-690 V) [A]
13 18 18 22 22 27 27 34
Przerywany (przetężenie 60sek.)(3 x 551-690 V) [A]
20,8 19,8 28,8 24,2 35,2 29,7 43,2 37,4
Ciągły KVA(przy 550 V) [KVA]
13,3 18,1 18,1 21,9 21,9 26,7 26,7 34,3
Ciągły KVA(przy 575 V) [KVA]
12,9 17,9 17,9 21,9 21,9 26,9 26,9 33,9
Ciągły KVA(przy 690 V) [KVA]
15,5 21,5 21,5 26,3 26,3 32,3 32,3 40,6
Maks. prąd wejściowy
Ciągły(3 x 525-690 V) [A]
15 19,5 19,5 24 24 29 29 36
Przerywany (przetężenie 60sek.)(3 x 525-690 V) [A]
23,2 21,5 31,2 26,4 38,4 31,9 46,4 39,6
Dodatkowa specyfikacja
Maks. przekrój kabla(zasilania, podziału
obciążenia i hamulca) [mm2
(AWG)]
35,-,- (2,-,-)
Maks. przekrój poprzeczny
kabla (silnik) [mm2 (AWG)]35, 25, 25 (2, 4, 4)
Maks. przekrój kabla z
rozłącznikiem zasilania [mm2
(AWG2))]
16,10,10 (6,8, 8)
Szacowane straty mocyprzy maks. obciążeniu
znamionowym [W] 4)
228 285 335 375
Ciężar,obudowa IP21, IP55 [kg]
27
Sprawność4) 0,98 0,98 0,98 0,98
Tabela 10.10
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
78 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
1010

Zasilanie 3 x 525- 690V AC
FC 302 P30K P37K P45K P55K P75K
Wysokie/normalne obciążenie* HO NO HO NO HO NO HO NO HO NO
Typowa moc na waleprzy 550 V [kW]
22 30 30 37 37 45 45 55 55 75
Typowa moc na waleprzy 575 V [HP]
30 40 40 50 50 60 60 75 75 100
Typowa moc na waleprzy 690 V [kW]
30 37 37 45 45 55 55 75 75 90
Obudowa IP21, 55 C2 C2 C2 C2 C2
Prąd wyjściowy
Ciągły(3 x 525–550 V) [A]
36 43 43 54 54 65 65 87 87 105
Przerywany (przetężenie60 sek.)(3 x 525-550 V) [A]
54 47,3 64,5 59,4 81 71,5 97,5 95,7 130,5 115,5
Ciągły(3 x 551-690 V) [A]
34 41 41 52 52 62 62 83 83 100
Przerywany (przetężenie60 sek.)(3 x 551-690 V) [A]
51 45,1 61,5 57,2 78 68,2 93 91,3 124,5 110
Ciągły KVA(przy 550 V) [KVA]
34,3 41,0 41,0 51,4 51,4 61,9 61,9 82,9 82,9 100,0
Ciągły KVA(przy 575 V) [KVA]
33,9 40,8 40,8 51,8 51,8 61,7 61,7 82,7 82,7 99,6
Ciągły KVA(przy 690 V) [KVA]
40,6 49,0 49,0 62,1 62,1 74,1 74,1 99,2 99,2 119,5
Maks. prąd wejściowy
Ciągły(przy 550 V) [A]
36 49 49 59 59 71 71 87 87 99
Ciągły(przy 575 V) [A]
54 53,9 72 64,9 87 78,1 105 95,7 129 108,9
Dodatkowa specyfikacja
Maks. przekrój kabla
(zasilania i silnika) [mm2
(AWG)]
150 (300 MCM)
Maks. przekrój kabla(podziału obciążenia i
hamulca) [mm2 (AWG)]
95 (3/0)
Maks. przekrój kabla zrozłącznikiem zasilania
[mm2 (AWG2))]
95, 70, 70(3/0, 2/0, 2/0)
185, 150, 120(350 MCM, 300
MCM, 4/0)-
Szacowane straty mocyprzy maks. obciążeniu
znamionowym [W] 4)
480 592 720 880 1200
Ciężar,obudowa IP21, IP55 [kg]
65
Sprawność4) 0,98 0,98 0,98 0,98 0,98
Tabela 10.11
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 79
10 10

Patrz maksymalne wartości znamionowe bezpieczników w 10.3.1 Bezpieczniki
1) Wysokie przeciążenie = 160% momentu obrotowego w ciągu 60 sek., Normalne przeciążenie = 110% momentu obrotowego w ciągu60 sek.
2) Amerykańska miara kabli.
3) Zmierzono używając 5 m ekranowanych kabli silnika przy obciążeniu znamionowym i częstotliwości znamionowej.
4) Standardowa utrata mocy występuje w warunkach nominalnego obciążenia i powinna wynosić +/-15% (zakres tolerancji związanyjest z rożnym napięciem i stanem kabli).Wartości opierają się na standardowej sprawności silnika (granica eff2/eff3). Mniej sprawne silniki przyczyniają się również do stratmocy w przetwornica częstotliwości i odwrotnie.Jeżeli częstotliwość przełączania jest zwiększana względem domyślnych ustawień, utraty mocy mogą znacząco wzrosnąć.LCP i typowe zużycie mocy karty sterowania są załączone. Dodatkowe opcje i obciążenie użytkownika może spowodować do 30Wdalszych strat. (Chociaż typowa utrata to jedynie 4W dla każdej w pełni obciążonej karty sterującej lub opcji na gnieździe A lubgnieździe B).Pomimo, że pomiary są wykonywane przez najnowszy sprzęt, należy dopuścić ich pewną niedokładność (+/-5%).
5) Trzy wartości określające maksymalny przekrój dotyczą odpowiednio: przewodu jednożyłowego, przewodu elastycznego i przewoduelastycznego z osłoną izolującą.
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
80 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
1010

10.2 Ogólne dane techniczne
Zasilanie sieciowe:Zaciski zasilania (6-impulsowe) L1, L2, L3Zaciski zasilania (12-impulsowe) L1-1, L2-1, L3-1, L1-2, L2-2, L3-2Napięcie zasilania 200-240V ±10%Napięcie zasilania FC 301: 380–480 V / FC 302: 380-500V ±10%
FC 302: 525-600V ±10%Napięcie zasilania FC 302: 525-690V ±10%
Niskie napięcie zasilania / zanik napięcia zasilania:Przy niskim napięciu zasilania lub zaniku napięcia, prz.cz. nadal działa, aż napięcie obwodu pośredniego spadnie poniżejminimalnego poziomu zatrzymania, który wynosi zwykle 15% poniżej najniższego znamionowego napięcia dla tej przetwornicyczęstotliwości. Nie można oczekiwać załączenia zasilania i osiągnięcia pełnego momentu obrotowego, gdy napięcie zasilania jestniższe o ponad 10% od najniższego znamionowego napięcia zasilania przetwornicy częstotliwości.
Częstotliwość zasilania 50/60 Hz ±5%Maks. tymczasowa asymetria między fazami zasilania 3,0 % napięcia znamionowego zasilaniaRzeczywisty współczynnik mocy (λ) ≥ 0,9 znamionowy przy obciążeniu znamionowymWspółczynnik przesunięcia fazowego (cos ϕ) bliski jedności (> 0,98)Przełączanie na wejściu zasilania L1, L2, L3 (załączanie zasilania) ≤ 7,5 kW maks. 2 razy/min.Przełączanie na wejściu zasilania L1, L2, L3 (załączanie zasilania) 11-75 kW maks. 1 raz/min.Przełączanie na wejściu zasilania L1, L2, L3 (załączanie zasilania) ≥ 90 kW maks. 1 raz/2 min.Środowisko zgodne z EN60664-1 kategoria przepięć III/stopień zanieczyszczenia 2
Urządzenie można stosować w obwodzie zdolnym dostarczać nie więcej niż 100 000 amperów wartości skutecznej RMS,symetrycznie, 240/500/600/690 V maks.
Wyjście silnika (U, V, W):Napięcie wyjściowe 0 -100% napięcia zasilaniaCzęstotliwość wyjściowa (0,25 - 75 kW) FC 301: 0,2–1000 Hz/FC 302: 0 - 1000 HzCzęstotliwość wyjściowa (90 - 1000 kW) 0 - 8001) HzCzęstotliwość wyjściowa w trybie Flux (tylko FC 302) 0 - 300 HzPrzełączanie na wyjściu NieograniczoneCzasy rozpędzania/zatrzymania 0,01 - 3600 sek.
1) Zależne od napięcia i mocy
Charakterystyki momentu:Moment rozruchowy (moment stały) maks. 160% przez 60 sek.1)
Moment rozruchowy maks. 180% do 0,5 sek.1)
Moment przeciążenia (moment stały) maks. 160% przez 60 sek.1)
Moment rozruchowy (moment zmienny) maks. 110% przez 60 sek.1)
Moment przeciążenia (moment zmienny) maks. 110% przez 60 sek.
Czas narastania momentu w (niezależnie od fsw) 10 msek.Czas narastania momentu we FLUX (dla fsw 5 kHz) 1 msek.
1) Wartości procentowe opisują moment znamionowy2). Czas odpowiedzi pędu zależy od aplikacji i obciążenia, lecz z zasady stopniowanie momentu od 0 do wartości zadanej wynosi4 lub 5-krotność czasu narastania momentu.
Wejścia cyfrowe:Programowalne wejścia cyfrowe FC 301: 4 (5)1)/FC 302: 4 (6)1)
Numer zacisku 18, 19, 271), 291), 32, 33,Logika PNP lub NPNPoziom napięcia 0 - 24V DCPoziom napięcia, logiczne „0” PNP < 5 V DCPoziom napięcia, logiczne „1” PNP > 10 V DCPoziom napięcia, logiczne '0' NPN2) > 19 V DCPoziom napięcia, logiczne '1' NPN2) < 14 V DCNapięcie maksymalne na wejściu 28 V DC
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 81
10 10

Zakres częstotliwości wyjściowej 0 - 110kHz(Cykl pracy) Min. szerokość impulsu 4,5 msRezystancja wejściowa, Ri około 4 kΩ
Zacisk bezpiecznego stopu 373, 4) (zacisk 37 pracuje tylko w logice PNP):Poziom napięcia 0 - 24V DCPoziom napięcia, logiczne „0” PNP < 4V DCPoziom napięcia, logiczne „1” PNP >20V DCNapięcie maksymalne na wejściu 28 V DCTypowy prąd wejściowy na 24 V 50mA rmsTypowy prąd wejściowy na 20 V 60mA rmsOpór bierny prądu 400 nF
Wszystkie wejścia cyfrowe są galwanicznie odizolowane od napięcia zasilania (PELV) i innych zacisków wysokiego napięcia.1) Zaciski 27 i 29 mogą być zaprogramowane również jako wyjście.
2) Oprócz zacisku 37 wejścia bezpiecznego stopu.3) Patrz 2.4.5.8 Zacisk 37, aby uzyskać więcej informacji na temat zacisku 37 i funkcji bezpiecznego stopu.4) W przypadku stosowania stycznika z cewką DC wewnątrz, połączoną z bezpiecznym stopem, ważne jest utworzenie drogipowrotnej dla prądu z cewki podczas jego wyłączania. Połączenie takie można wykonać za pomocą diody sprzęgła wyprzedze-niowego (lub MOV o napięciu 30 V lub 50 V, który zapewnia szybszy czas odpowiedzi) na cewce. Typowe styczniki można nabyćwraz z taką diodą.
Wejścia analogowe:Liczba wejść analogowych 2Numer zacisku 53, 54Tryby Napięcie lub prądWybór trybu Przełącznik S201 i przełącznik S202Tryb napięcia Przełącznik S201/przełącznik S202 = WYŁ. (U)Poziom napięcia FC 301: Od 0 do + 10/ FC 302: -10 do +10 V (skalowane)Rezystancja wejściowa, Ri ok. 10 kΩNapięcie maks. ± 20 VTryb prądu Przełącznik S201/przełącznik S202 = ZAŁ. (I)Poziom prądu 0/4 do 20 mA (skalowany)Rezystancja wejściowa, Ri ok. 200 ΩPrąd maks. 30 mARozdzielczość dla wejść analogowych 10 bit (znak +)Dokładność wejść analogowych Maks. błąd 0,5% w pełnej skaliSzerokość pasma FC 301: 20 Hz/ FC 302: 100 Hz
Wejścia analogowe są galwanicznie izolowane od napięcia zasilania (PELV) i innych zacisków wysokiego napięcia.
Ilustracja 10.1
Wejścia impulsowe/enkodera::Programowalne wejścia impulsowe/enkodera 2/1Numer zacisku impulsowego/enkodera 291), 332) / 323), 333)
Częstotliwość maks. na zaciskach 29, 32, 33 110 kHz (przeciwsobnie)Częstotliwość maks. na zaciskach 29, 32, 33 5 kHz (otwarty kolektor)
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
82 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
1010

Częstotliwość min. na zacisku 29, 32, 33 4 HzPoziom napięcia patrz 10.2.1 Wejścia cyfrowe:Napięcie maksymalne na wejściu 28 V DCRezystancja wejściowa, Ri ok. 4 kΩDokładność wejścia impulsowego (0,1 - 1 kHz) Maks. błąd: 0,1% w pełnej skaliDokładność wejścia enkodera (1 -11 kHz) Maks. błąd: 0,05% pełnej skali
Wejścia impulsowe i enkodera (zaciski 29, 32, 33) są galwanicznie odizolowane od napięcie zasilania (PELV) i innych zaciskówwysokiego napięcia.1) Tylko FC 3022) Wejścia impulsowe to 29 i 333) Wejścia enkodera: 32 = A i 33 = B
Wyjście cyfrowe:Programowalne wyjścia cyfrowe/impulsowe 2Numer zacisku 27, 29 1)
Poziom napięcia przy wyjściu cyfrowym/częstotliwościowym 0 - 24 VMaks. prąd wyjściowy (ujście lub źródło) 40 mAMaks. obciążenie przy wyjściu częstotliwościowym 1 kΩMaks. obciążenie pojemnościowe przy wyjściu częstotliwości 10 nFMinimalna częstotliwość wyjściowa przy wyjściu częstotliwościowym 0 HzMaksymalna częstotliwość wyjściowa przy wyjściu częstotliwościowym 32 kHzDokładność wyjścia częstotliwościowego Maks. błąd: 0,1 % w pełnej skaliRozdzielczość wyjść częstotliwościowych 12 bitów
1) Zaciski 27 i 29 można zaprogramować również jako wejścia.
Wyjście cyfrowe jest galwanicznie odizolowane od napięcia zasilania (PELV) i innych zacisków wysokiego napięcia.>
Wyjście analogowe:Liczba programowalnych wyjść analogowych 1Numer zacisku 42Zakres prądu przy wyjściu analogowym 0/4 - 20 mAMaks. obciążenie GND – wyjście analogowe 500 ΩDokładność na wyjściu analogowym Maks. błąd: 0,5% w pełnej skaliRozdzielczość na wyjściu analogowym 12 bitów
Wyjście analogowe jest galwanicznie odizolowane od napięcia zasilania (PELV) i innych zacisków wysokiego napięcia.
Karta sterująca, wyjście 24 V DC:Numer zacisku 12, 13Napięcie wyjściowe 24V +1, -3 VObciążenie maks. FC 301: 130 mA/ FC 302: 200 mA
Zasilanie 24 V DC jest galwanicznie izolowane od napięcia zasilania (PELV), lecz posiada ten sam potencjał, co wejścia i wyjściaanalogowe i cyfrowe.
Karta sterująca, wyjście 10 V DC:Numer zacisku 50Napięcie wyjściowe 10,5V ±0,5VObciążenie maks. 15mA
Zasilanie 10 V DC jest galwanicznie izolowane od napięcia zasilania (PELV) i innych zacisków wysokiego napięcia.
Karta sterująca, komunikacja szeregowa RS-485:Numer zacisku 68 (P,TX+, RX+), 69 (N,TX-, RX-)Numer zacisku 61 Masa dla zacisków 68 i 69
Obwód komunikacji szeregowej RS-485 jest funkcjonalnie oddzielony od pozostałych obwodów centralnych i galwanicznieodizolowany od napięcia zasilania (PELV).
Karta sterująca, komunikacja szeregowa USB:Standard USB 1.1 (Pełna prędkość)Wtyczka USB Wtyczka „urządzenia” USB typ B
Połączenie z komputerem PC zostało wykonane za pomocą standardowego kabla USB host/urządzenie.
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 83
10 10

Złącze USB jest galwanicznie izolowane od napięcia zasilania (PELV) i innych zacisków wysokiego napięcia.Połączenie USB nie jest izolowane galwanicznie od uziemienia ochronnego. Należy używać izolowanego laptopa jako połączeniaPC do złącza USB na przetwornica częstotliwości.
Wyjścia przekaźnikoweProgramowalne wyjścia przekaźnikowe FC 301wszystkie moce: 1 / FC 302 wszystie moce: 2Przekaźnik 01 Numer zacisku 1-3 (rozwierne), 1-2 (zwierne)Maks. obciążenie zacisku (AC-1)1) na 1-3 (rozwierny), 1-2 (zwierny) (Obciążenie oporowe) 240 V AC, 2 AMaks. obciążenie zacisku (AC-15)1) (Obciążenie indukcyjne przy cosφ 0,4) 240 V AC, 0,2 AMaks. obciążenie zacisku (DC-1)1) na 1-2 (zwierny), 1-3 (rozwierny) (Obciążenie oporowe) 60 V DC, 1 AMaks. obciążenie zacisku (DC-13)1) (Obciążenie indukcyjne) 24 V DC, 0,1 APrzekaźnik 02 (tylko FC 302) Numer zacisku 4-6 (rozwierne), 4-5 (zwierne)Maks. obciążenie zacisku (AC-1)1) na 4-5 (zwierny)(Obciążenie oporowe)2)3) 400 V AC, 2 AMaks. obciążenie zacisku (AC-15)1) na 4-5 (NO) (Obciążenie indukcyjne przy cosφ 0,4) 240 V AC, 0,2 AMaks. obciążenie zacisku (DC-1)1) na 4-5 (zwierny) (Obciążenie oporowe) 80 V DC, 2 AMaks. obciążenie zacisku (DC-13)1) na 4-5 (zwierny) (Obciążenie indukcyjne) 24 V DC, 0,1 AMaks. obciążenie zacisku (AC-1)1) na 4-6 (rozwierny) (Obciążenie oporowe) 240 V AC, 2 AMaks. obciążenie zacisku (AC-15)1) na 4-6 (NC) (Obciążenie indukcyjne @ cosφ 0,4) 240 V AC, 0,2 AMaks. obciążenie zacisku (DC-1)1) na 4-6 (rozwierny) (Obciążenie oporowe) 50 V DC, 2 AMaks. obciążenie zacisku (DC-13)1) na 4-6 (rozwierny) (Obciążenie oporowe) 24 V DC, 0,1 AObciążenie min. zacisku na 1-3 (rozwierny), 1-2 (zwierny), 4-6 (rozwierny), 4-5 (zwierny) 24 V DC 10 mA, 24 V AC 20 mAŚrodowisko zgodne z EN 60664-1 kategoria przepięć III/stopień zanieczyszczenia 2
1) IEC 60947 część 4 i 5Styki przekaźnikowe są galwanicznie odizolowane od reszty obwodu przez wzmocnioną izolację (PELV).2) Kategoria przepięcia II3) Aplikacje UL 300 V AC 2A
Długości kabli i przekrój poprzeczny dla przewodów sterowniczych1):Maks. długość kabla silnika, ekranowany FC 301: 50 m/FC 301 (A1): 25 m/ FC 302: 150 mMaks. długość kabla silnika, nieekranowany FC 301: 75 m/FC 301 (A1): 50 m/ FC 302: 300 mMaksymalny przekrój poprzeczny przewodu elastycznego/sztywnego bez końcowej osłony izolującejpodłączonego do zacisków sterowania 1,5mm2/16 AWGMaksymalny przekrój poprzeczny przewodu elastycznego z końcową osłoną izolującą podłączonego dozacisków sterowania 1mm2/18 AWGMaksymalny przekrój poprzeczny przewodu elastycznego z końcową osłoną izolującą z kołnierzempodłączonego do zacisków sterowania 0,5 mm2/20 AWGMinimalny przekrój poprzeczny zacisków sterowania 0,25 mm2/ 24 AWG
1)W przypadku przewodów silnoprądowych mocy, patrz tabele danych elektrycznych.
Wydajność karty sterującej:Odstęp skanowania FC 301: 5 ms/ FC 302: 1 msCharakterystyki sterowania:Rozdzielczość częstotliwości wyjściowej przy 0 - 1000 Hz ± 0,003 HzDokładność powtarzania dla Dokładnego startu/stopu (zaciski 18, 19) ≤± 0,1 msCzas reakcji systemu (zaciski 18, 19, 27, 29, 32, 33) ≤ 2 msZakres regulacji prędkości (pętla otwarta) 1:100 prędkości synchronicznejZakres regulacji prędkości (pętla zamknięta) 1:1000 prędkości synchronicznejDokładność prędkości (pętla otwarta) 30 – 4000 obr./min.: błąd ±8 obr./min.Dokładność prędkości (pętla zamknięta), zależna od rozdzielczości urządzeniasprzężenia zwrotnego 0 - 6000 obr./min.: błąd ±0,15 obr./min.Dokładność regulacji momentu (sprzężenie zwrotne prędkości) maks. błąd ±5% znamionowego momentu obrotowego
Wszystkie charakterystyki sterowania opierają się na 4-biegunowym silniku asynchronicznym
Środowisko:Obudowa IP201)/ Typ 1, IP212)/ Typ 1, IP55/ Typ 12, IP 66Test drgań 1,0 gMaks. wilgotność względna 5% - 93% (IEC 721-3-3; Klasa 3K3 (niekondensująca) podczas pracy
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
84 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
1010

Środowisko agresywne (IEC 60068-2-43) test H2S klasa KdTemperatura otoczenia3) Maks. 50°C (maksimum 45 °C dla średniej dobowej)
1) Tylko dla ≤ 3,7 kW (200–240 V), ≤ 7,5 kW (400 - 480/ 500V)2) Jako zestaw obudowy dla ≤ 3,7 kW (200–240 V), ≤ 7,5 kW (400 - 480/ 500V)3) Obniżanie wartości znamionowych w wysokiej temperaturze otoczenia – patrz warunki specjalne w Zaleceniach Projektowych
Minimalna temperatura otoczenia podczas pracy przemysłowej 0°CMinimalna temperatura otoczenia przy zredukowanej wydajności - 10°CTemperatura podczas magazynowania/transportu -25 - +65/70°CMaksymalna wysokość nad poziomem morza bez obniżania parametrów znamionowych 1000 m
Obniżanie parametrów znamionowych na dużej wysokości – patrz warunki specjalne w Zaleceniach Projektowych
Normy kompatybilności elektromagnetycznej (EMC), Emisja EN 61800-3, EN 61000-6-3/4, EN 55011Normy kompatybilności elektromagnetycznej(EMC), Odporność
EN 61800-3, EN 61000-6-1/2,EN 61000-4-2, EN 61000-4-3, EN 61000-4-4, EN 61000-4-5, EN 61000-4-6
Patrz punkt dotyczący warunków specjalnych w Zaleceniach Projektowych.
Zabezpieczenia i funkcje:
• Elektroniczne termiczne zabezpieczenie silnika przed przeciążeniem.
• Monitorowanie temperatury radiatora gwarantuje, że przetwornica częstotliwości wyłączy się, jeśli temperaturaosiągnie określony poziom. Przegrzanie nie może zostać zresetowane, dopóki temperatura radiatora nie spadnieponiżej wartości podanej w tabelach w dalszej części dokumentu (Uwaga – wskazane temperatury mogą różnić sięw przypadku różnych wielkości mocy, rozmiarów ram, stopni ochrony obudowy itd.).
• przetwornica częstotliwości jest zabezpieczona przed zwarciami pomiędzy zaciskami silnika U, V, W.
• W razie zaniku fazy zasilania, przetwornica częstotliwości wyłącza się lub generuje ostrzeżenie (w zależności odprzeciążenia).
• Monitorowanie napięcia obwodu pośredniego gwarantuje, że przetwornica częstotliwości wyłączy się, jeśli tonapięcie będzie zbyt niskie lub zbyt wysokie.
• przetwornica częstotliwości stale sprawdza poziom krytyczny wewnętrznej temperatury, chwilowe obciążenie,wysokie napięcie na obwodzie pośrednim oraz przy niskiej prędkości silnika. W odpowiedzi na wystąpieniepoziomu krytycznego, przetwornica częstotliwości może dostosować częstotliwość kluczowania oraz/ lub zmienićschemat kluczowania, aby zapewnić poprawne działanie przetwornica częstotliwości.
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 85
10 10

10.3 Tabele bezpieczników
Zaleca się stosować bezpieczniki i/lub wyłączniki po stroniezasilania w charakterze zabezpieczeń w przypadku awariikomponentów wewnątrz przetwornica częstotliwości(pierwszego błędu).
WAŻNEJest to niezbędne w celu zachowania zgodności z IEC60364 dla CE lub z NEC 2009 dla UL.
OSTRZEŻENIELudzie i mienie muszą być chronieni przed skutkami awariikomponentów wewnątrz przetwornica częstotliwości.
Zabezpieczenie obwodów odgałęzionychAby zabezpieczyć instalację przed zagrożeniemelektrycznym i pożarowym, wszystkie obwody odgałęzionew instalacji, aparaturze rozdzielczej, maszynach, itp.,powinny zostać zabezpieczone przed zwarciem i przetę-żeniem, zgodnie z przepisami krajowymi/międzynarodowymi.
WAŻNEZalecenia te nie obejmują zabezpieczenia obwodówodgałęzionych dla UL.
Zabezpieczenie przeciwzwarciowe:Danfoss zaleca stosowanie wymienionych poniżejbezpieczników/wyłączników, aby ochronić pracownikówobsługi oraz mienie w razie awarii komponentów wewnątrzprzetwornica częstotliwości.
10.3.1 Zalecenia
OSTRZEŻENIEW razie wadliwego działania, nieprzestrzeganie zaleceńmoże spowodować niepotrzebne zagrożenie dla zdrowia iżycia oraz uszkodzenie przetwornica częstotliwości i innychurządzeń.
Poniższa tabela przedstawia zalecane wartości znamionoweprądu. Dla małych i średnich wielkości mocy zaleca siębezpieczniki typu gG. W przypadku większych mocy zalecasię bezpieczniki aR. Należy stosować wyłączniki Moeller,ponieważ sprawdzono je w tej konfiguracji. Można używaćinnych typów wyłączników, pod warunkiem iż ograniczająenergię przetwornica częstotliwości do poziomu równegolub niższego od znamion wyłączników Moeller.
Jeżeli wybrano bezpieczniki/wyłączniki zgodnie zzaleceniami, potencjalne uszkodzenia przetwornicaczęstotliwości będą ograniczone przede wszystkim downętrza urządzenia.
Więcej informacji przedstawiono w Nocie aplikacyjnejBezpieczniki i wyłączniki, MN.90.TX.YY
10.3.2 Zgodność z CE
Bezpieczniki lub wyłączniki muszą być obowiązkowozgodne z IEC 60364. Danfoss zaleca następujące.
Poniższe bezpieczniki można stosować w obwodziezdolnym dostarczać nie więcej niż 100 000 amperówsymetrycznej wartości skutecznej RMS, 240 V, albo 480 V,albo 500 V, albo 600 V, w zależności od napięcia znamio-nowego przetwornica częstotliwości. Przy zastosowaniuwłaściwych bezpieczników, wartość znamionowa prąduzwarcia (SCCR) przetwornica częstotliwości to 100 000Arms.
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
86 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
1010

Obudowa Moc FC 300 Zalecanyrozmiar bezpiecznika
Zalecanymaks. rozmiar bezpiecznika
Zalecany wyłącznik Maks. poziomwyłączenia awaryjnego
Wielkość [kW] Moeller [A]
A1 0.25-1.5 gG-10 gG-25 PKZM0-16 16
A2 0.25-2.2 gG-10 (0,25–1,5)gG-16 (2,2)
gG-25 PKZM0-25 25
A3 3.0-3.7 gG-16 (3)gG-20 (3,7)
gG-32 PKZM0-25 25
B3 5,5 gG-25 gG-63 PKZM4-50 50
B4 7,5–15 gG-32 (7,5)gG-50 (11)gG-63 (15)
gG-125 NZMB1-A100 100
C3 18,5–22 gG-80 (18,5)aR-125 (22)
gG-150 (18,5)aR-160 (22)
NZMB2-A200 150
C4 30-37 aR-160 (30)aR-200 (37)
aR-200 (30)aR-250 (37)
NZMB2-A250 250
A4 0.25-2.2 gG-10 (0,25–1,5)gG-16 (2,2)
gG-32 PKZM0-25 25
A5 0.25-3.7 gG-10 (0,25–1,5)gG-16 (2,2–3)
gG-20 (3,7)
gG-32 PKZM0-25 25
B1 5.5-7.5 gG-25 (5,5)gG-32 (7,5)
gG-80 PKZM4-63 63
B2 11 gG-50 gG-100 NZMB1-A100 100
C1 15-22 gG-63 (15)gG-80 (18,5)gG-100 (22)
gG-160 (15–18,5)aR-160 (22)
NZMB2-A200 160
C2 30-37 aR-160 (30)aR-200 (37)
aR-200 (30)aR-250 (37)
NZMB2-A250 250
Tabela 10.12 200-240 V, wymiar ramy A, B i C
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 87
10 10
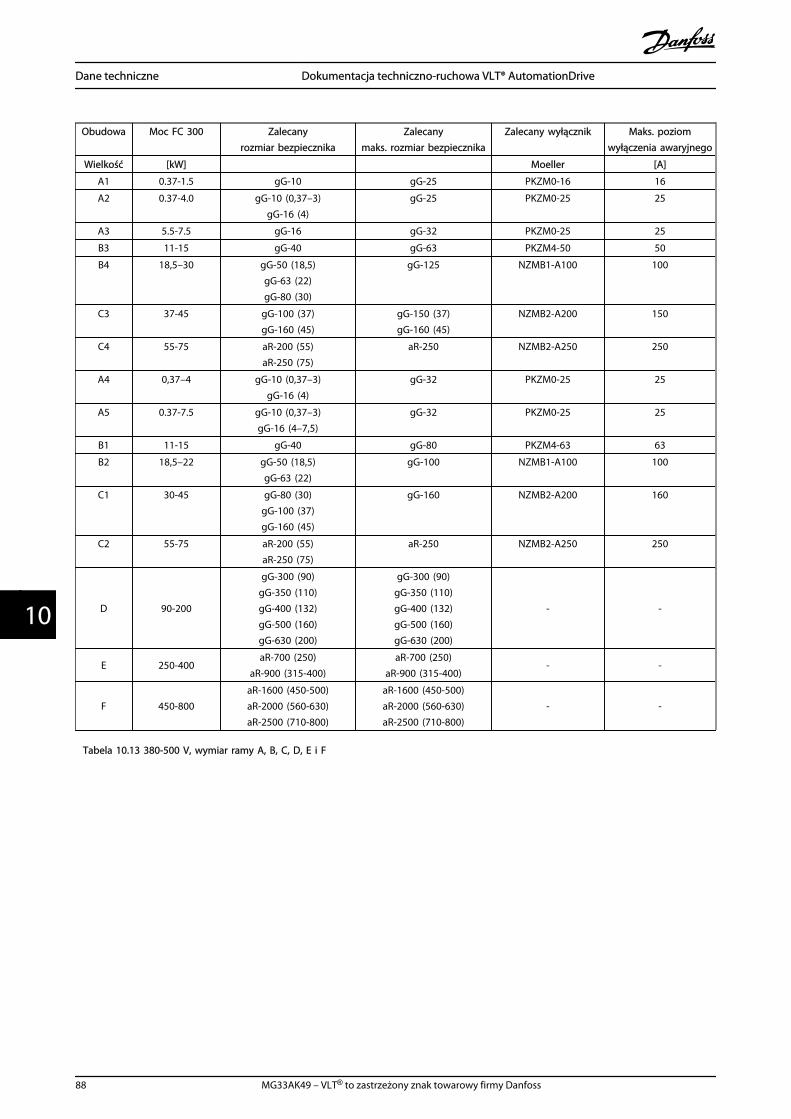
Obudowa Moc FC 300 Zalecanyrozmiar bezpiecznika
Zalecanymaks. rozmiar bezpiecznika
Zalecany wyłącznik Maks. poziomwyłączenia awaryjnego
Wielkość [kW] Moeller [A]
A1 0.37-1.5 gG-10 gG-25 PKZM0-16 16
A2 0.37-4.0 gG-10 (0,37–3)gG-16 (4)
gG-25 PKZM0-25 25
A3 5.5-7.5 gG-16 gG-32 PKZM0-25 25
B3 11-15 gG-40 gG-63 PKZM4-50 50
B4 18,5–30 gG-50 (18,5)gG-63 (22)gG-80 (30)
gG-125 NZMB1-A100 100
C3 37-45 gG-100 (37)gG-160 (45)
gG-150 (37)gG-160 (45)
NZMB2-A200 150
C4 55-75 aR-200 (55)aR-250 (75)
aR-250 NZMB2-A250 250
A4 0,37–4 gG-10 (0,37–3)gG-16 (4)
gG-32 PKZM0-25 25
A5 0.37-7.5 gG-10 (0,37–3)gG-16 (4–7,5)
gG-32 PKZM0-25 25
B1 11-15 gG-40 gG-80 PKZM4-63 63
B2 18,5–22 gG-50 (18,5)gG-63 (22)
gG-100 NZMB1-A100 100
C1 30-45 gG-80 (30)gG-100 (37)gG-160 (45)
gG-160 NZMB2-A200 160
C2 55-75 aR-200 (55)aR-250 (75)
aR-250 NZMB2-A250 250
D 90-200
gG-300 (90)gG-350 (110)gG-400 (132)gG-500 (160)gG-630 (200)
gG-300 (90)gG-350 (110)gG-400 (132)gG-500 (160)gG-630 (200)
- -
E 250-400aR-700 (250)
aR-900 (315-400)aR-700 (250)
aR-900 (315-400)- -
F 450-800aR-1600 (450-500)aR-2000 (560-630)aR-2500 (710-800)
aR-1600 (450-500)aR-2000 (560-630)aR-2500 (710-800)
- -
Tabela 10.13 380-500 V, wymiar ramy A, B, C, D, E i F
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
88 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
1010

Obudowa Moc FC 300 Zalecanyrozmiar bezpiecznika
Zalecanymaks. rozmiar bezpiecznika
Zalecany wyłącznik Maks. poziomwyłączenia awaryjnego
Wielkość [kW] Moeller [A]
A2 0–75–4,0 gG-10 gG-25 PKZM0-25 25
A3 5.5-7.5 gG-10 (5,5)gG-16 (7,5)
gG-32 PKZM0-25 25
B3 11-15 gG-25 (11)gG-32 (15)
gG-63 PKZM4-50 50
B4 18,5–30 gG-40 (18,5)gG-50 (22)gG-63 (30)
gG-125 NZMB1-A100 100
C3 37-45 gG-63 (37)gG-100 (45)
gG-150 NZMB2-A200 150
C4 55-75 aR-160 (55)aR-200 (75)
aR-250 NZMB2-A250 250
A5 0.75-7.5 gG-10 (0,75–5,5)gG-16 (7,5)
gG-32 PKZM0-25 25
B1 11-18 gG-25 (11)gG-32 (15)
gG-40 (18,5)
gG-80 PKZM4-63 63
B2 22-30 gG-50 (22)gG-63 (30)
gG-100 NZMB1-A100 100
C1 37-55 gG-63 (37)gG-100 (45)aR-160 (55)
gG-160 (37-45)aR-250 (55)
NZMB2-A200 160
C2 75 aR-200 (75) aR-250 NZMB2-A250 250
Tabela 10.14 525-600 V, wymiar ramy A, B i C
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 89
10 10

Obudowa Moc FC 300 Zalecanyrozmiar bezpiecznika
Zalecanymaks. rozmiar bezpiecznika
Zalecany wyłącznik Maks. poziomwyłączenia awaryjnego
Wielkość [kW] Moeller [A]
B2 11151822
gG-25 (11)gG-32 (15)gG-32 (18)gG-40 (22)
gG-63 - -
C2 3037455575
gG-63 (30)gG-63 (37)gG-80 (45)
gG-100 (55)gG-125 (75)
gG-80 (30)gG-100 (37)gG-125 (45)
gG-160 (55-75)
- -
D 37-315
gG-125 (37)gG-160 (45)
gG-200 (55-75)aR-250 (90)
aR-315 (110)aR-350 (132-160)
aR-400 (200)aR-500 (250)aR-550 (315)
gG-125 (37)gG-160 (45)
gG-200 (55-75)aR-250 (90)
aR-315 (110)aR-350 (132-160)
aR-400 (200)aR-500 (250)aR-550 (315)
- -
E 355-560aR-700 (355-400)aR-900 (500-560)
aR-700 (355-400)aR-900 (500-560)
- -
F 630-1200
aR-1600 (630-900)aR-2000 (1000)aR-2500 (1200)
aR-1600 (630-900)aR-2000 (1000)aR-2500 (1200)
- -
Tabela 10.15 525-690 V, wymiar ramy B, C, D, E i F
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
90 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
1010

Zgodność z ULBezpieczniki i wyłączniki muszą być obowiązkowo zgodne z NEC 2009. Zalecamy korzystanie z poniższych
Poniższe bezpieczniki można stosować w obwodzie zdolnym dostarczać nie więcej niż 100 000 amperów symetrycznejwartości skutecznej RMS, 240 V lub 480 Vlub 500 Vlub 600 V, w zależności od wartości znamionowej napięcia przetwornicaczęstotliwości. Przy zastosowaniu właściwych bezpieczników, wartość znamionowa prądu zwarcia (SCCR) to 100 000 Arms.
Zalecany maks. rozmiar bezpiecznika
Moc FC300
Bussmann Bussmann Bussmann Bussmann Bussmann Bussmann
[kW] Typ RK11) Typ J Typ T Typ CC Typ CC Typ CC
0.25-0.37 KTN-R-05 JKS-05 JJN-05 FNQ-R-5 KTK-R-5 LP-CC-5
0.55-1.1 KTN-R-10 JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10
1,5 KTN-R-15 JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15
2,2 KTN-R-20 JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20
3,0 KTN-R-25 JKS-25 JJN-25 FNQ-R-25 KTK-R-25 LP-CC-25
3,7 KTN-R-30 JKS-30 JJN-30 FNQ-R-30 KTK-R-30 LP-CC-30
5,5 KTN-R-50 KS-50 JJN-50 - - -
7,5 KTN-R-60 JKS-60 JJN-60 - - -
11 KTN-R-80 JKS-80 JJN-80 - - -
15–18,5 KTN-R-125 JKS-125 JJN-125 - - -
22 KTN-R-150 JKS-150 JJN-150 - - -
30 KTN-R-200 JKS-200 JJN-200 - - -
37 KTN-R-250 JKS-250 JJN-250 - - -
Tabela 10.16 200-240 V, wymiar ramy A, B i C
Zalecany maks. rozmiar bezpiecznika
Moc FC300
SIBA Littel FuseFerraz-
ShawmutFerraz-
Shawmut
[kW] Typ RK1 Typ RK1 Typ CC Typ RK13)
0.25-0.37 5017906-005 KLN-R-05 ATM-R-05 A2K-05-R
0.55-1.1 5017906-010 KLN-R-10 ATM-R-10 A2K-10-R
1,5 5017906-016 KLN-R-15 ATM-R-15 A2K-15-R
2,2 5017906-020 KLN-R-20 ATM-R-20 A2K-20-R
3,0 5017906-025 KLN-R-25 ATM-R-25 A2K-25-R
3,7 5012406-032 KLN-R-30 ATM-R-30 A2K-30-R
5,5 5014006-050 KLN-R-50 - A2K-50-R
7,5 5014006-063 KLN-R-60 - A2K-60-R
11 5014006-080 KLN-R-80 - A2K-80-R
15–18,5 2028220-125 KLN-R-125 - A2K-125-R
22 2028220-150 KLN-R-150 - A2K-150-R
30 2028220-200 KLN-R-200 - A2K-200-R
37 2028220-250 KLN-R-250 - A2K-250-R
Tabela 10.17 200-240 V, wymiar ramy A, B i C
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 91
10 10

Zalecany maks. rozmiar bezpiecznika
Moc FC300
Bussmann Littel FuseFerraz-
ShawmutFerraz-
Shawmut
[kW] Typ JFHR22) JFHR2 JFHR24) J
0.25-0.37 FWX-5 - - HSJ-6
0.55-1.1 FWX-10 - - HSJ-10
1,5 FWX-15 - - HSJ-15
2,2 FWX-20 - - HSJ-20
3,0 FWX-25 - - HSJ-25
3,7 FWX-30 - - HSJ-30
5,5 FWX-50 - - HSJ-50
7,5 FWX-60 - - HSJ-60
11 FWX-80 - - HSJ-80
15–18,5 FWX-125 - - HSJ-125
22 FWX-150 L25S-150 A25X-150 HSJ-150
30 FWX-200 L25S-200 A25X-200 HSJ-200
37 FWX-250 L25S-250 A25X-250 HSJ-250
Tabela 10.18 200-240 V, wymiar ramy A, B i C
1) Bezpieczniki KTS firmy Bussmann mogą zastępować KTN w przypadku przetwornic częstotliwości 240 V.
2) Bezpieczniki FWH firmy Bussmann mogą zastępować FWX w przypadku przetwornic częstotliwości 240 V.
3) Bezpieczniki A6KR firmy FERRAZ SHAWMUT mogą zastępować A2KR w przypadku przetwornic częstotliwości 240V.
4) Bezpieczniki A50X firmy FERRAZ SHAWMUT mogą zastępować A25X w przypadku przetwornic częstotliwości 240V.
Zalecany maks. rozmiar bezpiecznika
Moc FC300
Bussmann Bussmann Bussmann Bussmann Bussmann Bussmann
[kW] Typ RK1 Typ J Typ T Typ CC Typ CC Typ CC
0.37-1.1 KTS-R-6 JKS-6 JJS-6 FNQ-R-6 KTK-R-6 LP-CC-6
1.5-2.2 KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10
3 KTS-R-15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15
4 KTS-R-20 JKS-20 JJS-20 FNQ-R-20 KTK-R-20 LP-CC-20
5,5 KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25
7,5 KTS-R-30 JKS-30 JJS-30 FNQ-R-30 KTK-R-30 LP-CC-30
11 KTS-R-40 JKS-40 JJS-40 - - -
15 KTS-R-50 JKS-50 JJS-50 - - -
18 KTS-R-60 JKS-60 JJS-60 - - -
22 KTS-R-80 JKS-80 JJS-80 - - -
30 KTS-R-100 JKS-100 JJS-100 - - -
37 KTS-R-125 JKS-125 JJS-125 - - -
45 KTS-R-150 JKS-150 JJS-150 - - -
55 KTS-R-200 JKS-200 JJS-200 - - -
75 KTS-R-250 JKS-250 JJS-250 - - -
Tabela 10.19 380-500 V, wymiar ramy A, B i C
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
92 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
1010

Zalecany maks. rozmiar bezpiecznika
FC 302Power
SIBA Littel FuseFerraz-
ShawmutFerraz-
Shawmut
[kW] Typ RK1 Typ RK1 Typ CC Typ RK1
0.37-1.1 5017906-006 KLS-R-6 ATM-R-6 A6K-6-R
1.5-2.2 5017906-010 KLS-R-10 ATM-R-10 A6K-10-R
3 5017906-016 KLS-R-15 ATM-R-15 A6K-15-R
4 5017906-020 KLS-R-20 ATM-R-20 A6K-20-R
5,5 5017906-025 KLS-R-25 ATM-R-25 A6K-25-R
7,5 5012406-032 KLS-R-30 ATM-R-30 A6K-30-R
11 5014006-040 KLS-R-40 - A6K-40-R
15 5014006-050 KLS-R-50 - A6K-50-R
18 5014006-063 KLS-R-60 - A6K-60-R
22 2028220-100 KLS-R-80 - A6K-80-R
30 2028220-125 KLS-R-100 - A6K-100-R
37 2028220-125 KLS-R-125 - A6K-125-R
45 2028220-160 KLS-R-150 - A6K-150-R
55 2028220-200 KLS-R-200 - A6K-200-R
75 2028220-250 KLS-R-250 - A6K-250-R
Tabela 10.20 380-500 V, wymiar ramy A, B i C
Zalecany maks. rozmiar bezpiecznika
FC 302Power
Bussmann Ferraz- Shawmut Ferraz- Shawmut Littel Fuse
[kW] JFHR2 J JFHR21) JFHR2
0.37-1.1 FWH-6 HSJ-6 - -
1.5-2.2 FWH-10 HSJ-10 - -
3 FWH-15 HSJ-15 - -
4 FWH-20 HSJ-20 - -
5,5 FWH-25 HSJ-25 - -
7,5 FWH-30 HSJ-30 - -
11 FWH-40 HSJ-40 - -
15 FWH-50 HSJ-50 - -
18 FWH-60 HSJ-60 - -
22 FWH-80 HSJ-80 - -
30 FWH-100 HSJ-100 - -
37 FWH-125 HSJ-125 - -
45 FWH-150 HSJ-150 - -
55 FWH-200 HSJ-200 A50-P-225 L50-S-225
75 FWH-250 HSJ-250 A50-P-250 L50-S-250
Tabela 10.21 380-500 V, wymiar ramy A, B i C
1) Bezpieczniki Ferraz-Shawmut A50QS mogą zastępować bezpieczniki A50P.
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 93
10 10

Zalecany maks. rozmiar bezpiecznika
FC 302Power
Bussmann Bussmann Bussmann Bussmann Bussmann Bussmann
[kW] Typ RK1 Typ J Typ T Typ CC Typ CC Typ CC
0.75-1.1 KTS-R-5 JKS-5 JJS-6 FNQ-R-5 KTK-R-5 LP-CC-5
1.5-2.2 KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10
3 KTS-R15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15
4 KTS-R20 JKS-20 JJS-20 FNQ-R-20 KTK-R-20 LP-CC-20
5,5 KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25
7,5 KTS-R-30 JKS-30 JJS-30 FNQ-R-30 KTK-R-30 LP-CC-30
11 KTS-R-35 JKS-35 JJS-35 - - -
15 KTS-R-45 JKS-45 JJS-45 - - -
18 KTS-R-50 JKS-50 JJS-50 - - -
22 KTS-R-60 JKS-60 JJS-60 - - -
30 KTS-R-80 JKS-80 JJS-80 - - -
37 KTS-R-100 JKS-100 JJS-100 - - -
45 KTS-R-125 JKS-125 JJS-125 - - -
55 KTS-R-150 JKS-150 JJS-150 - - -
75 KTS-R-175 JKS-175 JJS-175 - - -
Tabela 10.22 525-600 V, wymiar ramy A, B i C
Zalecany maks. rozmiar bezpiecznika
FC 302Power
SIBA Littel FuseFerraz-
ShawmutFerraz-
Shawmut
[kW] Typ RK1 Typ RK1 Typ RK1 J
0.75-1.1 5017906-005 KLS-R-005 A6K-5-R HSJ-6
1.5-2.2 5017906-010 KLS-R-010 A6K-10-R HSJ-10
3 5017906-016 KLS-R-015 A6K-15-R HSJ-15
4 5017906-020 KLS-R-020 A6K-20-R HSJ-20
5,5 5017906-025 KLS-R-025 A6K-25-R HSJ-25
7,5 5017906-030 KLS-R-030 A6K-30-R HSJ-30
11 5014006-040 KLS-R-035 A6K-35-R HSJ-35
15 5014006-050 KLS-R-045 A6K-45-R HSJ-45
18 5014006-050 KLS-R-050 A6K-50-R HSJ-50
22 5014006-063 KLS-R-060 A6K-60-R HSJ-60
30 5014006-080 KLS-R-075 A6K-80-R HSJ-80
37 5014006-100 KLS-R-100 A6K-100-R HSJ-100
45 2028220-125 KLS-R-125 A6K-125-R HSJ-125
55 2028220-150 KLS-R-150 A6K-150-R HSJ-150
75 2028220-200 KLS-R-175 A6K-175-R HSJ-175
Tabela 10.23 525-600 V, wymiar ramy A, B i C
1) Pokazane bezpieczniki 170M Bussmann wykorzystują wskaźnik wizualny -/80, -TN/80 typ T, -/110 lub TN/110 typT; można zamieniać bezpieczniki wskaźnikowe tej samej wielkości oraz o takiej samej wartości prądu w amperach.
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
94 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss
1010

Zalecany maks. rozmiar bezpiecznika
FC 302[kW]Power
Maks.bezpiec
znikwstępny
BussmannE52273
RK1/JDDZ
BussmannE4273J/JDDZ
BussmannE4273
T/JDDZ
SIBAE180276
RK1/JDDZ
LittelFuseE81895
RK1/JDDZ
Ferraz-Shawmut
E163267/E2137RK1/JDDZ
Ferraz-Shawmut
E2137J/HSJ
11 30 A KTS-R-30 JKS-30 JKJS-30 5017906-030 KLS-R-030 A6K-30-R HST-30
15–18,5 45 A KTS-R-45 JKS-45 JJS-45 5014006-050 KLS-R-045 A6K-45-R HST-45
22 60 A KTS-R-60 JKS-60 JJS-60 5014006-063 KLS-R-060 A6K-60-R HST-60
30 80 A KTS-R-80 JKS-80 JJS-80 5014006-080 KLS-R-075 A6K-80-R HST-80
37 90 A KTS-R-90 JKS-90 JJS-90 5014006-100 KLS-R-090 A6K-90-R HST-90
45 100 A KTS-R-100 JKS-100 JJS-100 5014006-100 KLS-R-100 A6K-100-R HST-100
55 125 A KTS-R-125 JKS-125 JJS-125 2028220-125 KLS-150 A6K-125-R HST-125
75 150 A KTS-R-150 JKS-150 JJS-150 2028220-150 KLS-175 A6K-150-R HST-150
* Zgodny z UL tylko dla 525–600 V
Tabela 10.24 525-690 V*, wymiar ramy B i C
10.4 Momenty dokręcania złączy
Moc (kW) Moment obrotowy (Nm)
Obu-dowa
200-240V380-480/500
V525-600V 525-690V Zasilanie Silnik
PodłączenieDC
HamulecUziemie
niePrzekaźn
ik
A2 0,25–2,2 0,37–4,0 1,8 1,8 1,8 1,8 3 0,6
A3 3,0–3,7 5,5–7,5 0,75–7,5 1,8 1,8 1,8 1,8 3 0,6
A4 0,25–2,2 0,37–4,0 1,8 1,8 1,8 1,8 3 0,6
A5 0,25–3,7 0,37–7,5 0,75–7,5 1,8 1,8 1,8 1,8 3 0,6
B1 5,5–7,5 11 - 15 11 - 15 1,8 1,8 1,5 1,5 3 0,6
B2 111822
1822
1122
4.54.5
4.54.5
3.73.7
3.73.7
33
0.60.6
B3 5,5–7,5 11 - 15 11 - 15 1,8 1,8 1,8 1,8 3 0,6
B4 11 - 15 18 - 30 18 - 30 4,5 4,5 4,5 4,5 3 0,6
C1 15 - 22 30 - 45 30 - 45 10 10 10 10 3 0,6
C2 30 - 37 55 - 75 55 - 75 30 - 75 14/241) 14/241) 14 14 3 0,6
C3 18 - 22 37 - 45 37 - 45 10 10 10 10 3 0,6
C4 30 - 37 55 - 75 55 - 75 14/24 1) 14/24 1) 14 14 3 0,6
Tabela 10.25 Dokręcanie zacisków
1) Dla różnych wymiarów kabli x/y, gdzie x ≤ 95 mm2 i y ≥ 95 mm2.
Dane techniczne Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 95
10 10

Indeks
AA53............................................................................................................. 18
A54............................................................................................................. 18
AC O Zmiennym Kształcie Fali............................................................ 6
Alarmy...................................................................................................... 53
AMABez Podłączonego T27................................................................... 44Z Podłączonym T27......................................................................... 44
Auto On...................................................................................... 50, 32, 52
Automatyczne Dopasowanie Silnika...................................... 50, 27
Auto-reset............................................................................................... 30
BBezpieczniki......................................................... 12, 25, 61, 66, 25, 86
Blokada Zewnętrzna............................................................................ 37
CCharakterystyka
Momentu............................................................................................ 81Sterowania.......................................................................................... 84
Chłodzenie................................................................................................ 8
CzasRozpędzania...................................................................................... 29Zatrzymania....................................................................................... 29
Częstotliwość Przełączania........................................................ 58, 52
DDane
Silnika................................................................ 27, 29, 33, 58, 62, 28Techniczne.................................................................................. 81, 69
Danfoss FC.............................................................................................. 23
Danych Technicznych Urządzenia.................................................... 5
Długość I Przekrój Poprzeczny Kabli.............................................. 84
Dokręcanie Zacisków.......................................................................... 95
DziennikAlarmów.............................................................................................. 33Błędów................................................................................................. 33
Dziennika Błędów................................................................................. 31
EEkranowane Przewody Sterownicze............................................. 17
EMC............................................................................................................ 25
FFiltra RFI.................................................................................................... 14
Funkcji Wyłączenia Awaryjnego..................................................... 12
HHamowania............................................................................................. 60
Hamowanie............................................................................................ 50
Hand On..................................................................................... 50, 29, 32
Harmonikę................................................................................................. 6
IIEC 61800-3............................................................................................. 14
Inicjalizacja.............................................................................................. 34
Inicjalizację.............................................................................................. 33
Instalacja.................................................................................................. 26
InstalacjęInstalację...................................................................................... 16, 25Przylegająco......................................................................................... 9
Instalacji................................................................................... 5, 8, 12, 23
Izolacji Szumów..................................................................................... 12
Izolowanego........................................................................................... 14
KKabel Ekranowany................................................................................ 25
KableSilnika............................................................................................ 12, 25Silników........................................................................................ 14, 12Silnikowe............................................................................................... 8
KabliEkranowanych.............................................................................. 8, 12Sterowania.......................................................................................... 12
Kanałach.................................................................................................. 25
Kanału Kablowego............................................................................... 12
Kanały Kablowe..................................................................................... 25
KartaSterująca, Komunikacja Szeregowa RS-485........................... 83Sterująca, Komunikacja Szeregowa USB................................. 83Sterująca, Wyjście +10 V DC......................................................... 83Sterująca, Wyjście 24 V DC............................................................ 83
Kierunek Obrotów Silnika........................................................... 28, 31
Komenda Stop....................................................................................... 51
Komunikacja Szeregowa............................................................. 83, 22
Komunikacji Szeregowej....... 6, 10, 15, 17, 32, 33, 50, 51, 52, 53
KomunikatyNa Temat Statusu............................................................................. 50O Błędach............................................................................................ 57
KonfiguracjiKonfiguracji................................................................................. 29, 31Skróconej............................................................................................ 27
Kontrola Bezpieczeństwa.................................................................. 24
Kopiowanie Ustawień Parametrów............................................... 33
LLokalny Panel Sterowania................................................................. 30
Indeks Dokumentacja techniczno-ruchowa VLT® AutomationDrive
96 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss

MMenu
Główne.......................................................................................... 31, 35Głównym............................................................................................. 31
Moc Wejścia.............................................................................................. 7
Mocowania............................................................................................. 25
MocySilnika............................................................................................ 10, 62Wejściowej.......................................................................................... 66
Modbus RTU........................................................................................... 23
Monitoring Systemu............................................................................ 53
Montażu..................................................................................................... 9
NNapięcia
Wejściowego..................................................................................... 53Zasilania................................................................................. 15, 31, 32Zewnętrznego................................................................................... 35
NapięcieIndukowane....................................................................................... 12Wejściowe........................................................................................... 26Zasilania.......................................................................... 15, 24, 61, 51
Nastawy.................................................................................................... 52
Nieuziemiony Trójkąt.......................................................................... 14
OObniżaniu Wartości Znamionowych............................................. 58
Obniżenie Wartości Znamionowych................................................ 8
Obrotów Enkodera............................................................................... 28
Obwodu Pośredniego DC.................................................................. 58
OchronęPrzed Przeciążeniem....................................................................... 12Przejściową........................................................................................... 6
Ochrony Przez Przeciążeniem............................................................ 8
Odizolowania Szumu.......................................................................... 25
Odstęp......................................................................................................... 9
OgraniczenieMomentu............................................................................................ 29Prądu.................................................................................................... 29
OkablowanieSilnika................................................................................................... 13Sterowania..................................................................... 12, 13, 25, 15
Opcji Komunikacji................................................................................ 61
Oprogramowaniem Konfiguracyjnym MCT-10......................... 43
Ostrzeżenia............................................................................................. 53
Ostrzeżenie I Alarm.............................................................................. 55
Otoczenie................................................................................................ 84
PPELV.................................................................................................... 15, 48
Peryferyjnych Sterowników................................................................ 6
Pętle Doziemienia................................................................................ 17
PętliOtwartej........................................................................................ 18, 35Zamkniętej......................................................................................... 18
Płycie Tylnej.............................................................................................. 9
Podnoszenia............................................................................................. 9
Połączenia Uziomowe......................................................................... 25
Połączenie Uziemienia........................................................................ 13
Polecenia Zewnętrzne........................................................................... 7
Polecenie Wykonania.......................................................................... 29
Powiązane Z Mocą............................................................................... 69
Poziom Napięcia................................................................................... 81
Pozwalającego Na Uruchomienie.................................................. 51
Pracy Lokalnej........................................................................................ 30
PrądAC Wejścia............................................................................................. 6DC...................................................................................................... 6, 51Pełnego Obciążenia........................................................................ 24RMS.......................................................................................................... 6Silnika............................................................................................... 7, 31Upływowy.................................................................................... 24, 13Upływowy (> 3,5 MA)..................................................................... 13Wyjściowy.................................................................................... 58, 51Zmienny O Ukształtowanej Fali..................................................... 6
Prądem Silnika................................................................................ 27, 58
PrąduSilnika................................................................................................... 62Wejściowego..................................................................................... 14
Prędkości Obrotowej Silnika............................................................. 26
Prób Działania.......................................................................................... 5
Próba Działania..................................................................................... 24
Próby Działania...................................................................................... 29
Program Zacisków................................................................................ 17
Programami............................................................................................ 38
Programów............................................................................................. 43
Programowania.................................................................. 5, 29, 31, 33
Programowanie.............................................................................. 38, 30
Programowaniem................................................................................. 18
Programowaniu.................................................................................... 35
Programowe........................................................................................... 33
PrzekrojePrzewodów........................................................................................ 14Żył.......................................................................................................... 12
Przepięcia......................................................................................... 29, 52
Prześwit Obiegu Chłodzenia............................................................ 25
Przetężenie............................................................................................. 52
Przetwornic Częstotliwości............................................................... 12
Przewodem Uziomowym.................................................................. 25
Indeks Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 97

PrzewodówUziemiających................................................................................... 13Zasilania............................................................................................... 12
PrzewoduDoziemienia....................................................................................... 13Ekranowanego.................................................................................. 12Sterowania.......................................................................................... 17
PrzewodySilnika................................................................................................... 12Sterowania.......................................................................................... 17Sterownicze........................................................................................ 17
Przyciskami Nawigacyjnymi............................................... 35, 50, 26
PrzyciskiFunkcyjne............................................................................................ 32Menu..................................................................................................... 31Menu Wyświetlacza......................................................................... 30Nawigacyjne............................................................................... 30, 32
Przykład Programowania................................................................... 35
PrzykładyPrzykłady............................................................................................. 44Programowania Zacisku................................................................ 36Zastosowań........................................................................................ 44
RRęczna Inicjalizacja............................................................................... 34
Rejestr Alarmów.................................................................................... 32
Resecie...................................................................................................... 64
Reset.......................................................................................................... 32
Resetuje.................................................................................................... 34
Rozłącznik................................................................................................ 26
Rozłącznika Wejściowego................................................................. 14
Rozłączników......................................................................................... 24
RozruchRozruch......................................................................................... 24, 66Systemu............................................................................................... 29Wstępny.............................................................................................. 24
Rozruchowych....................................................................................... 25
Rozruchu...................................................................................... 5, 33, 35
Rzeczywistą Wartość Zadaną........................................................... 51
SSpecyfikacje....................................................................................... 9, 69
Specyfikacji............................................................................................. 23
Sprzężenia Zwrotnego................................................................ 18, 61
SprzężenieSprzężenie.......................................................................................... 64Zwrotne.................................................................................... 6, 25, 51
Stan Silnika I Systemu............................................................................ 6
Startu Lokalnego.................................................................................. 29
SterowaniaLokalnego.................................................................................... 30, 50Opcjonalnego Termistora............................................................. 15
Sterowanie Hamulcem Mechanicznym........................................ 22
Struktura Menu..................................................................................... 38
Strukturze Menu................................................................................... 32
Sygnał Sterujący...................................................................... 35, 36, 50
SygnałówWejściowych............................................................................... 17, 18Wyjściowych...................................................................................... 38
Sygnału Wejściowego......................................................................... 36
Symbole...................................................................................................... 1
Systemu Sterowania.............................................................................. 6
Szumów Elektrycznych....................................................................... 13
Szybkie Menu.................................................................................. 31, 35
Szybkiego Menu................................................................................... 38
TTermistor................................................................................................. 48
Termistora........................................................................................ 15, 58
Test Sterowania Lokalnego............................................................... 29
TrybieAuto...................................................................................................... 31Lokalnym Strzałki............................................................................. 29Statusu................................................................................................. 50Sterowania Lokalnego................................................................... 32
Typy Ostrzeżeń I Alarmów................................................................. 53
UUkładów Sterowania.............................................................................. 6
Urządzeń Opcjonalnych..................................................................... 26
Urządzenia Opcjonalnie..................................................................... 18
Usuwania Usterek................................................................................. 57
Uziemiania.............................................................................................. 14
UziemienieUziemienie.............................................................. 13, 14, 24, 13, 25Za Pomocą Kabla Ekranowanego.............................................. 13
Uziemiony Trójkąt................................................................................ 14
WWartość
Zadana.......................................................................................... 31, 44Zadaną.................................................................................................... 1Zadana Prędkości............................................................................. 50Zadaną Prędkości...................................................................... 29, 36Znamionowa Prądu........................................................................... 8
WartościPrądu Pod Pełnym Obciążeniem.................................................. 8Zadanej......................................................................................... 50, 52Zadanej Prędkości........................................................................... 18Znamionowej Prądu....................................................................... 58
WejśćAnalogowych.................................................................................... 57Cyfrowych........................................................................................... 52
Indeks Dokumentacja techniczno-ruchowa VLT® AutomationDrive
98 MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss

WejściaAC.......................................................................................................... 14Analogowe.................................................................................. 16, 82Analogowego.................................................................................... 18Cyfrowe................................................................................................ 37Cyfrowe:............................................................................................... 81Cyfrowego............................................................................ 15, 18, 52Impulsowe/enkodera..................................................................... 82Zasilania............................................................................................... 12
WejścieCyfrowe................................................................................................ 59Zasilania............................................................................................... 13
Wejściu Zasilania................................................................................... 25
WieluPrzetwornic Częstotliwości.......................................................... 14Silników............................................................................................... 24
Współczynnik Mocy............................................................................... 6
Współczynnika Mocy.................................................................... 14, 25
WydajnośćKarty Sterującej................................................................................. 84Wyjściowa (U, V, W)......................................................................... 81
WyjściaPrzekaźnika........................................................................................ 16Przekaźnikowe.................................................................................. 84
WyjścieAnalogowe.................................................................................. 16, 83Cyfrowe................................................................................................ 83Silnika................................................................................................... 81
Wykrywania I Usuwania Usterek....................................................... 5
Wykrywaniu I Usuwaniu Usterek.................................................... 66
WyłączenieAwaryjne............................................................................................. 53Z Blokadą............................................................................................ 53
Wyłączniki Różnicowe......................................................................... 25
Wyłączników Różnicowoprądowych RCD................................... 13
Wymagania Dotyczące Odstępu....................................................... 8
Wyposażenia Opcjonalnego............................................................ 14
Wyposażenie Opcjonalne.................................................................... 6
Wyświetlane Ostrzeżenia I Alarmy................................................. 53
ZZabezpieczenia
I Funkcje.............................................................................................. 85Silnika................................................................................................... 12
ZabezpieczenieObwodów Odgałęzionych............................................................ 86Silnika................................................................................................... 85
ZaciskachWejściowych...................................................................................... 24Wyjściowych...................................................................................... 24
Zaciskami Sterowania......................................................................... 27
Zaciski Sterowania........................................................... 32, 50, 52, 36
ZaciskówSterowania................................................................................... 10, 16Wejściowych............................................................................... 10, 14Wyjściowych...................................................................................... 10
Zacisku53.................................................................................................... 18, 3554........................................................................................................... 18
Zakres Temperatury............................................................................. 25
Zaprogramowane Dane..................................................................... 33
Zaprogramowania............................................................................... 57
Zaprogramowanie............................................................................... 26
ZasilaniaZasilania............................................................................................... 12AC................................................................................................... 10, 14Silnika................................................................................................... 12Wejściowego..................................................................................... 53
ZasilanieZasilanie.......................................................................... 69, 75, 76, 77AC............................................................................................................. 6Sieciowe (L1, L2, L3)........................................................................ 81Silnika................................................................................................... 13Wejściowe.................................................................................... 14, 24
Zdalna Wartość Zadana..................................................................... 51
ZdalnePolecenia............................................................................................... 6Programowanie................................................................................ 43
Zestawie Parametrów......................................................................... 31
Zewnętrznej Blokady.......................................................................... 18
Zewnętrznymi Poleceniami.............................................................. 50
Zezwolenia................................................................................................ 1
Zresetować............................................................................... 52, 53, 58
Zresetuj.................................................................................................... 30
Indeks Dokumentacja techniczno-ruchowa VLT® AutomationDrive
MG33AK49 – VLT® to zastrzeżony znak towarowy firmy Danfoss 99

www.danfoss.com/drives
*MG33AK49*130R0300 MG33AK49 Wer. 2012-03-30





























