Upload
salez
View
336
Download
12
Embed Size (px)
Citation preview
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
1/172
1
FAKULTET SPORTSKIH NAUKABanja Luka
Doc.dr Osmo Bajri
BIOMEHANIKA SA KINEZIOLOGIJOM
(Skripta)
Banja Luka, 2010/2011
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
2/172
2
1. U V O D
1.1. Pojam predmeta
Svaki rad ili bilo koja druga ljudska djelatnost, uvijek je izraena pokretom,odnosnokretanjem. Pokret predstavlja osnovno sredstvo i prvorazredni cilj svih oblika kretnogispoljavanja ovjeka. Potreba za kretanjem je jedna od osnovnih svojstava svih ivih bia.Ponavljanjem pokreta poboljava se motorika ovjeka to se odraava na stanjesvijesti, a toopet omoguava usvajanje navika na jo sloenija kretanja. Pokret se moe analizirati sarazliitih aspekata: anatomskog, fiziolokog,biomehanikog,korektivnog, psiholokog, pedagokog, sociolokog, estetskog itd.
U najjednostavnijem odreen ju, ljudski pokret predstavlja pomjeranje ili pomicanje pojedinih
dijelova tijela (segmenata) ili kompletnog tijela u prostoru. Meutim, ni jedan pokret ne moenastati, kao to ni jedno kretanje ne moe biti uspostavljeno, niti narueno mirovanje bezdejstva sile.
Analiza uslova kretanja ivih tijela daleko je sloenija od analize kretanja neive prirode. Tasloenost i specifinost kretanja ivih tijela, kod kojih se mora voditi rauna o mehanikimosobinama kretnog aspekta i o biolokim uslovima organizma nametnula je novi pravacistraivanja i uslovila formiranje nove naune discipline koja je nala svoj izraz pod pojmombiomehanika.
Prema tome,biomehanika se moe definisati kaonauka o kretanju ivog tijela i o kretanjuiji je uzrok ivo tijelo.
To je specifina nauna disciplina, praktinog karaktera, koja se koristi fizikim opaanjima uistraivanju uticaja unutranjih i spoljanjih sila na ovjekovo tijelo, za vrijeme kretanja imirovanja (relativnog).
Dakle, biomehanika prouava stanje kretanja i promjene stanja kretanja ivog tijela u odnosuna uzroke (sile) i u odnosu na uslove spoljanje sredine.
1.2. Znaaj predmeta
Potreba za kretanjem je sastavni dio svakog ivog bia, jer predstavlja izuzetno vanu ulogu unjihovom razvoju. U fizikom vaspitanju svako kretanje predstavlja aktivnost uesnika koji susvjesni svog cilja. Radi se o aktivnom odnosu ovjeka prema sredini u kojoj se kree. Iz tograzloga kretanje se ne moe shvatati samo kao bioloko -mehaniki proces, ve kao idrutveno znaajna aktivnost.
Sa drutvenog aspekta, istraivanje kretne aktivnosti ovjeka je vrlo kompleksno i iroko, a udananjim uslovima ono se sve vie proiruje.
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
3/172
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
4/172
4
Prvi podaci poinju od Galena (131 - 201), poznatog gladijatorskog ljekara, koji je utvrdio dase impulsi, koji potiu iz mozga, ivcima prenose na miie, koji se zbog toga skrauju (gre),to prouzrokuje kretanje.
U srednjem vijeku dolazi do zastoja u razvoju anatomije i drugih nauka, zbog poznatog odnosa crkve prema prirodnim naukama.
Leonardo da Vini (1452- 1519), veliki naunik i umjetnik, potajno seinteresovao za ovjeiji aparat za kretanje i mogunosti da i ovjek moe da
poleti.Njegovu studiju o anatomiji ovjeka ovjekovjeili su brojni crti ostali dodanas a posebno onaj na kojem je prikazan veliki grudni mii koji bi trebao da pokree vjetak i konstruisana krila.
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
5/172
5
Boreli (1679), italijanski ljekar i matematiar objavio je prvo pisano djelo sa biomehanikimsadrajem pod nazivomDe Motu Animalum (o kretanju ivotinja). On po prvi put tei daodredi teite ovjeijeg tijela primjenom zakona o ravnotei na poluzi.
U drugoj polovini 19.vijeka francuski ljekari Marey i Demeni, uvode nove metode uistraivanju kretanja istraujui tehniku brzog mara na kolonijalnim trupama.
Pronalazak fotografije, pravi prekretnicu u biomehanikom istraivanju kretanja.
Marey (1882), konstruisao je kinokameru koja je bila pretea modernoj kinokameri sa ciljemda otkrije tajnu letenja.
Demeni, Mareyev uenik je pronaao novu metodu istraivanja, hronofotografski metod, koja je imala mnogostruku primjenu.
Dvadesetih godina 19.vijeka njemaki naunici W. Braune i O. Fischer, usavrili su metodhronofotografije. Uspjeli su da odrede teite tijela i teinu pojedinih dijelova tijela. Objavilisu rad pod nazivom:Der Gang Des Menschen. (ovjeiji hod).
U periodu prije 1.sv.rata vie anatoma je objavilo radove, koji su doprinijeli razvoju funkcionalne anatomije, (H.Straser,1908, udbenik o mehanici miia i zglobova;R.Fick,1910, udbenik o anatomiji i mehanici miia i zglobova; H.Braus, djelo anatomijaovjeka).
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
6/172
6
U periodu izmeu dva svjetska rata u bivem SSSR, biomehanika doivljava snaan zamah usvom razvoju. Objavljeni su znaajni radovi u tom periodu, kao to su: M. F. Ivanjicki, (1938) Kretanje ovjeijeg tijela.A. Kokotov,(1939),Biomehanika tjelesnih vjebi. N. A.Berntajn, (1940) Ispitivanje biomehanike hodanja, tranja i skoka.
U bivoj Jugoslaviji na inicijativu B. Polia direktor Instituta za fiziku kulturu u Beogradu,1950. godine, osnovan je kabinet za biomehanika istraivanja, prvi takve vrste na naim prostorima.
1960. godine u Lajpcigu je odrano prvo meunarodno zasjedanje o biomehanici na kome je biomehanika promovisana kao posebna nauna disciplina.
Za Winter-a (1979), biomehanika je interdisciplinirana nauka jer opisuje, analizira i procjenjuje ljudsko kretanje.
Miller i Nelson, (1973), smatraju da je biomehanika nauka koja istrauje efekte unutranjih ivanjskih sila koje djeluju na ivi organizam.
U novije vrijeme biomehanika se veoma brzo razvija zbog velike primjene kompjutersketehnike pomou koje je mogue prikazati film na televizijskom ekranu povezan sakompjuterom i elektronskom olovkom. Na istom ekranu mogu se obiljeiti takekretanjasportiste o kojima elimo dobiti brojane podatke. Takoer, biomehanika je mnogo dobilarazvojem elektronike.
U SAD-u je prisutna velika ekspanzija u razvoju biomehanike. Posebno treba pomenuti drPetera Cavangha, koji ima najsavremeniju laboratoriju u Pensilvaniji, kao i Dejvida Martina, profesora na Univerzitetu u Dordiji.
1.4. Podjela biomehanike
Na osnovu karaktera, pravca i metoda rada biomehanika se dijeli na:unutranju i vanjskubiomehaniku.
Unutranja biomehanika se bavi objektom - tijelom i njegovim kretnim aparatom sa gleditamehanike i rada miia i uglavnom tretira jednostavna kretanja i elemente kretanja, a ponekadi sloenija kretanja, sloene kretne strukture - praenjem veliine i efikasnosti miine snage,miine djelatnosti sinergista i antagonista i djelatnosti kretnog mehanizma ovjeijeg tijelakao i praenje njihovog vremenskog toka). Ona je blia fiziolokoj strani vjebanja isportskog treniranja, nego tehnici vjebanja.
Vanjska biomehanika se nadovezuje na unutranju, ali ona se bavi vanjskom stranomkretnog istraivanja i ona tretira sloenije strukture kretanja, bioloke uslove, tok kretanja i predpostavke ovjeka, kao i mehanike sredine osim vazduha i vode, a tu ubrajamo podlogu,sprave, opremu, odrazite, stazu za tranje itd). Nju interesuje prije svega tehnika vjebanja.
Na osnovu opteg kriterija biomehanika se dijeli na: optu i aplikativnu biomehaniku.
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
7/172
7
Opta biomehanika prouava opte zakonitosti ovjekovog (ivotinjskog) kretanja i ona sedijeli na: kinematiku, dinamiku i statiku.
Kinematika opisuje, istrauje kretanje, bez obzira na uzroke kretanja - sile). Operie pojmovima: duina - vrijeme ( m, s ).
Dinamika istrauje uzroke kretanja i povezanost izmeu kretanja i sila koje su uzrok tomkretanju, uzimajui u obzir njegovu masu. To je nauka o ubrzanom kretanju tijela, a ubrzanje postoji uvijek kada se mijenja brzina. Ta promjena moe biti po veliini (nejednoliko pravolinijsko kretanje), ili po pravcu (krivolinijsko kretanje). Operie pojmovima:duina,vrijeme, masa (m, s, kg).
Statika istrauje uslove mirovanja u kojima se unutranje i vanjske sile nalaze u ravnotei(geometrija sila). Operie pojmovima: duina i sila ( m, N ).
Aplikativna biomehanika se bavi uim, specijalnim problemima - istraivanja poloaja ikretanja tijela i sprava u toku rada, fizikog vjebanja i sporta, lijeenja kretanjem itd. Prema podruju koje izuava dobija i svoj naziv kao npr: biomehanika boksa, biomehanika rvanja, biomehanika skijanja, biomehanika vjebi na spravama, biomehanika skoka u dalj itd.
2. MJERENJA U BIOMEHANICI
Nauna disciplina koja se bavi teorijom i praksom mjerenja naziva se metodologija.Osnovnismisao procesa mjerenja je uporeivanje poznate fizike veliine (mjerne jedinice) sanepoznatom veliinom, iste prirode (koja se mjeri). Mjerljive su samo fizike veliine. U biomehanici sporta se mjere mehanike veliine, kao npr:mjere se duine (duina skoka ilistaze, visina prepone isl.),vrijeme (trajanje odreenog kretanja, faze pokreta),sile (teinatijela ilitereta, sila trenja),izvreni rad, snaga kojom miii djeluju tokom odreenogvremena.
Mjerenje predstavlja fundamentalni dio procesa naunog eksperimenta i osnovni mu je ciljobjektivizacija naunog saznanja. Bez mjerenja je nemogue zamisliti savremena istraivanja,a njihova primjena sve vie zadire i u oblast drutvenih nauka.
Za sport, fiziko vaspitanje i neke oblasti medicine i biomedicinskog ininjer stvanajznaajnije su one oblasti biomehanike koje se bave pokretima ovjeka. Zbog toga su unjima predmet direktnog mjerenja mehanike veliine koje opisuju ili kretanje cijelog tijela,ili pokrete nekih njegovih segmenata.
U mehanikom smislu tijelo ov jeka, odnosno, njegov lokomotorni aparat, predstavlja sistemizuzetne sloenosti. Uzrok tome je veliki broj pokretnih i polupokretnih zglobova kojiistovremeno predstavljaju i spoj i centre pokreta pojedinih segmenata tijela, visokozno -elastina tkiva vezana za krute oslonce tih segmenata - kosti, prenoenje sile preko lancauzastopno spojenih segmenata (tzv kinetikih lanaca), sloenost miinog aparata preko koga
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
8/172
8
ovjek direktno upravlja svojim pokretima itd. Iz tih razloga do skora nije bilo mogue mjeriti parametre sloenih kretanja kinetikih lanaca ovjeka, ve samo njihov konaan rezultat.
Osnovni zadaci biomehanike su:
1. Da odredi spoljanje i unutranje sile ako su poznata kretanja subjekta,2. Da odredi kretanja ako su poznate sile koje djeluju na subjekt,3. Da odredi spoljanje i unutranje sile koje djeluju na subjekt u mirovanju
Poznavanje zakona fizike u biomehanici, kao to su razliiti uglovi izbaaja sprave,relativnihuglova izmeu segmenta tijela, poloaja sprave u odnosu na relativnelokacije tijela, brzine iubrzanja u pojedinim vremenskim intervalima i razliitim trajektorijama kretanja, zatimrazmjene energije unutar pojedinih dijelova tijela i prijenos energije izmeu segmenta tijela,ukupni moment impulsa, registracija aktivacijei dinamike bioelektrine aktivnosti miinogsistema.
Biomehanika mjerenja se dijele na: 1.Kinematika mjerenja, 2.Kinetika mjerenja, 3.Elektromiografska mjerenja i4.Izokinetika mjerenja.
Prema nekim autorima, praktinija i jednostavnija podjela metoda je na:1.Jednostavne metode i2.Sloene metode
Jednostavne metode koriste vizualno opaanje, uglomjere, goniometre, mjerne trake..U ovim metodama mjerenja dolazi se do osnovnih antropometrijskih karakteristika kojespadaju u domen kineziometrije.
Sloene metode koriste tehnoloki razvijene elemente kao to su: dinamometri,elektromiografi, izokinetiki sistemi, balans sistemi,sistemi za analizu ciklinih kretanja, funkcionalne magnetne rezonance, funkcionalna elektroencefalografija, termovizija,velosimetrija.Savremeni biomehaniki sistemi u svom sadraju za osnovu imaju primjenu tehnolokihaparatura sa svojim egzaktnim procedurama.
Kinematika
Kinematika predstavlja analizu kretanja tijela ili segmenta tijela bez sagledavanja uzrokakretanja.Kinematska analiza odnosi se na opisivanje i kvantifikovanje linearnog i ugaonog pomakaizmeu segmenata ili kretanja u odnosu na okolinu kao i izraunavanje brzine i ubrzanja.Odreivanje poloaja i pokreta tijela ili dijelova tijela ostvaruje se identifikacijom markera pozicioniranim na karakteristinim anatomskim takama.Kinematika bazirana na 2D i 3D rekonstrukciji sve vie je prisutna u sportu, sportskoj
profilaksi i rehabilitaciji. Ovakvi sistemi zahtijevaju laboratorije opremljene najsavremenijomopremom. Opremu ine: PC raunar , monitor, visoko rezoluntni monitor, kamere,
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
9/172
9
magnetoskop, kalibracijski okvir, IC kamere, laseri, UZ senzori, elektromagnetni senzori,akcelometri, elektrogoniometri.Pri ispitivanju kinematike tijela mjere se poloaji, brzine i ubrzanja figurativnih taaka tijela(centri zglobova, centri teita tijelova tijela ili cijelog tijela).
Razlikuju se 2 faze rada: Experimentalna fazaU ovoj fazi vre se mjerenja na aparaturama. Kod ovakvih mjerenja treba definisati pravacvertikale i kalibracione dui ija je duina poznata da bi se izmjerila odgovarajua distanca. Potrebno je izvriti:- snimanje pokreta kino - kamerom,- razvijanje filma,- projektovanje snimka po snimka,- dobijanje kinograma
Faza obrade
Prvi koraci u analizi kretne strukture nakon snimanja je pretvaranje videa u niz samostalnihdigitalnih slika koje se pohranjuju u memoriju raunara. Zatim se prati lokacija markera naslikama u kalibriranom prostorusa poznavanjem njihovih tanih koordinata.Prezentacija senajee vri na tri osnovna naina:
1.animacija izrada kinograma,2.grafikon prikaz,3.numeriki ispis
Animacija je nain prezentacije gdje se analizira kretna struktura u formi tzv. stapiastefigure.
Grafikon je mogue predstaviti kroz prethodno ekstrahovane podatke kao to su prostorni pomaci bilo koje take tijela, brzine, ubrzanja, uglovi segmenta i sl.
Numeriki ispis se moe prezentovati kroz odabrane jedinice vremena, a zatim dalje procesirati brojnim matematiko-statistikim softverskim paketima.
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
10/172
10
Slika 1 i 2 Izgled bimehanikog laboratorija i animacija kretanja
Kinetika (dinamometrija)Kinetika omoguava opis odnosa sila i pokreta koje one uzrokuju.Pri izvoenju pokreta silemogu biti interne, koje se javljaju kao posljedica aktivnosti miia i ligamenata ili eksternekao sile reakcije podloge i vanjskih optereenja te momenti istih sila.
Kinematika se zasniva na primjeni nekih razliitih vrsta pretvaraa sila koji se koriste urazliitoj vrsti opreme za mjerenje sile.Postoje dvije osnovne grupe:
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
11/172
11
1.rastezne mjerne trake , dinamometri sa oprugama2.piezoelektrini pretvarai (otpornici),Kistler platforme
Pretvarai sile najee koriste platforme za mjerenje sile reakcije podloge, razlicite vrstedinamometra koje se ugrauju u sportske sprave, te ortokinetiki uloci (sportska obua).
Platforma sile (tenziometrijska platforma), predstavlja mjerni sistem koji registruje vektor silekao funkciju vremana koja djeluje na povrinu platforme. Ove platforme su znaajne i imajuiroku primjenu u mjerenjima sile reakcije podloge, mjerenju udarnih impulsa i mjerenjeintercakcije ovjek -sprava (u gimnastici).
To znai da se istovremeno mjere sve tri komponente ovog vektora ( Fx, Fy i Fz ),kao ilokacija njegove napadne take koordinate take na povrini platforme.
Kinetike podatke mogue je prikupiti na 2 naina: Direktno je mogue prikupiti veoma precizne podatke o hor izontalnim, vertikalnim ilateralnim komponentama sile prilikom razliitih kontakata sa podlogom.
Indirektno je mogue prikupiti podatke uz uslov da su uz kinematike parametre poznateantropomorfne karakteristike, te se uz odreene metode mogu izraunati razni kinetiki parametri kao to su spoljanje i unutranje sile, momenti i energija.
Elektromiografija
Elektromiografija se zaniva na primjeni viekanalnih elektromiografkih ureaja(EMG) i omoguuje detekciju i registraciju bioelektrine aktivnosti skeletnog
miia pri emu se koriste povrinske elektrode.
Eksperimentalne metode u biomehanici se dijele u dvije grupe:
1. grupa ( metode mjerenja parametara kretanja kod kojih se mehanike veliine mjeretokom kretanja. To su obino sloena mjerenja kod kojih se koristi moderna mjernaoprema.Kao primjer mogu se navesti: mjerenje sile tokom odraza u skoku u vis pomou tenziometrijske platforme ili mjerenje kinematike segmenata ruke tokom bacanja lopte pomou kinematografske metode ili pomou sistemaelektrogoniometara.
2. grupa ( metode mjerenja parametara konanog rezultata kretanja.To su jednostavnamjerenja kod kojih se koristi jednostavna mjerna oprema.Kao primjer mogu senavesti: mjerenje duine skoka centimetarskom pantljikom, vrijeme prelaska odreenestaze izmjereno hronometrom ili serijom fotoelija, maksimalna sila u nekom testuizmjerena dinamometrom.
Druga podjela mjerenja u biomehanici zasniva se na mehanikim veliinama koje se direktnomjere.To je podjela na:
mjerenja kinematikih veliina, mjerenja dinamikih veliina,
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
12/172
12
elektromiografska mjerenja.
2.1 . Mjerenja kinematikih veliina
U ovoj vrsti biomehanikih eksperimenata mjere se kinematike veliine koje opisuju pokrete. Klasina metoda, koja je stara ve 100 godina, je kinematografska metoda (gdje prefikskine - oznaava mjerenje kinematike pokreta).
Ona se zasniva na snimanju kretanja kinokamerom, a sada i elektronskom i video kamerom, ianalizom jednog po jednog snimka. Ovi snimci mogu da prikazuju uzastopne i vremenskiekvidistantne poloaje pri kretanju cijelog tijela, zatim nekog njegovog kinetikog lanca, ilikretanja pri interakciji tijelo -sprava ( npr. ruka -lopta pri smeu u odbojci ). Ovommetodom se direktno mjere poloaji segmenata tijela, a iz njihovih promjena izraunavaju se i
druge kinematike veliine koje opisuju to kretanje ( npr. poloaji, brzine i ubrzanja tjelesnihsegmenata, zatim uglovi tih segmenata ili zglobni uglovi, njihove ugaone brzine i ubrzanja,trajanja odreenih faza kretanja, frekvencija ciklinih pokreta i dr. ). Pomenute veliine se neodnose na kretanja bilo kojih taaka ili dui koji se na tijelu ovjeka mogu uoiti. Naime, taj postupak se primjenjuje na figurativne take i ose koje se eksplicitno definiu u okviru biomehanikih modela tijela. To suteita dijelova tijela, centri zglobova i uzdune osedijelova tijela, najee definisane poloajima dva susjedna zgloba.
U primjeni ove metode postoje dvije, relativno nezavisne faze rada i to:
1. Eksperimentalna faza - tokom nje se registruju poloaji figurativnh taaka i osa tijela, 2. Faza obrade eksperimentalnih rezultata - tokom ove faze se iz dobijenih rezultataizraunavaju realne vrijednosti kinematikih veliina, koje se zatim prikazuju nagrafiki ilitabelarni nacin.
Kinematografska metoda je metoda koja se zasniva na snimanju kretanjakinokamerom,elektronskom i video kamerom, i analizom jednog po jednog snimka. Direktnose mjere poloaji segmenata tijela, a iz njihovih promjena izraunavaju se i druge kinematikeveliine koje opisuju to kretanje ( npr: poloaji, brzine i ubrzanja tjelesnih segmenata, uglovi
tih segmenata ili zglobni uglovi,njihove ugaone brzine i ubrzanja, trajanje odreenih fazakretanja, frekvencija ciklinih pokreta i dr.). Pomenute veliine se odnose na kretanja teitadijelova tijela, centre zglobova i uzdune ose dijelova tijela, najee definisane poloajimadva susjedna zgloba.
Savremana varijanta kinematografske metode se zasniva na registrovanju kretanja tzv.emisionih ili refleksionih dioda koje se fiksiraju na povrini tjelesnih segmenata,a ija sekinematika snima.
Pri ispitivanju kinematike tijelamjere se poloaji,brzine i ubrzanja figurativnih taaka, uglovi,ugaone brzine i ubrzanja koji odgovaraju figurativnim osama.
2.1.1. Eksperimentalna faza
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
13/172
13
Postoji vie metoda pomou kojih se u eksperimentalnoj fazi vri mjerenje. Najstarija i danas jo uvijek esto koritena je metoda snimanja pokreta kino -kamerom. Pokret se snima uizabranoj ravni, pri emu se snimi i du koja definie pravac vertikale (najee visak), kao ikalibraciona du ija je duina poznata, a koja je potrebna da bi se izmjerila odgovarajuadistanca. Po razvijanju filma, projektuje se snimak po snimak (ili se uvijek isti broj snimaka preskoi, o emu e kasnije biti rije) na istu osnovu (npr. list papira). Tako se dobijakonogram. On reprezentuje uzastopne poloaje tijela pri kretanju, prikazane izabranim biomehanikim modelom i projektovane na ravan snimanja (slika 1.) na njemu se uvijek prikazuje i pomenuti pravac vertikale i kalibraciona du. Iz odnosa njene realne duine iduine izmjerene na kinogramu izraunava se numerika vrijednost razmjere (tj. izraunavase koliko puta su duine vidljive na kinogramu umanjene u odnosu na njihove realne duine). Na osnovu tako dobijenog kinograma, u fazi obrade se izraunavaju kinematike veliine koje
karakteriu kretanje tijela u vremenskomintervalu preoteklom izmeu dva uzastopno prikazana poloaja tijela. Ova metoda se naziva klasinom kinematografskom metodom.
Slika 1.
Savremena varijenta kinematografske metode koristi digitalizator slike u sprezi sa raunarom.Umjesto da se na papiru pravi kinogram koji e kasnije da se analizira, slika po slika se projektuje na povrini digitalizatora. Na svakoj od njih se pokretnim kursorom lokalizujucentri zglobova (ili neke druge figurativne veliine, to zavisi od izabranog modela tijela), ijese x i y koordinate memoriu u raunaru. Iz ovih koordinata raunar zatim izraunava i svezadate posredno mjerne veliine uzdune ose segmenata, poloaje teita, njihove brzine iubrzanja, zglobne uglove itd.
Pored navedenog, zahvaljujui savremenim mogunostima raunarske obrade televizijskeslike, sada se sve ee umjesto kino, korise video kamere. Moderniji naini mjerenja kretanja
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
14/172
14
tijela ovjeka zasnivaju se na dostignuima savremene tehnologije kao to je detekcijainfracrvene svjetlosti ili ultrazvuka i primjena razliitih elektronskih telemetrijskih sistema.
Ova grupa metoda se zajedniki naziva videografskom (ili metodom aktivnih markera).
Ona takoe spada u kinematografske metode. Videografska metoda se zasniva na mjerenju poloaja malih objekata ( tzv. Markera ) koji ili emituju sopstvenu, ili reflektuju spoljadobijenu infracrvenu svjetlost ( ponekad i ultrazvuk ). Uz njih se koriste elektronske kamerekoje mogu istovremeno da snimaju vei broj ovih markera i da im mjere obje koordinate uravni snimanja. Fiksiranjem markera na aktuelne figurativne take tijela ( tj. na njihove projekcije na ravan snimanja ) i detekcijom njihovog poloaja elektronskim kamerama,indirektno se mjeri i poloaj figurativnihtaaka na kojima su locirane.
Ovako dobijeni rezultati se tokom samog mjerenja dovedu u laboratorijski raunar kojiregistruje poloaje ovih taaka, prikazuje kretanje odgovarajuih segmenata tijela i, po
potrebi, izraunava druge kinematike veliine ( brzinu, ubrzanja, zglobne uglove, itd.). timecijeli postupak znatno dobija na brzini i tanosti, u odnosu na ve pomenutu klasinukinematografsku metodu. Koritenjem dvije kamere koje isto kretanje snimaju pod uglom,ova varijanta kinematografske metodeomoguava i trodimenzionalnu analizu kretanja tijela.
Meutim, osim visoke cijene potrebne opreme i sloene kalibracije, ove metode pokazujumane pri snimanju rotacionih kretanja, kada kamere pomenute emisione (ili refleksione)objekte u nekim fazama nevide, ili se oni dislociraju u odnosu na figurativnu taku kojureprezentuju.
Ilustracija snimanja kretanja ovom metodom prikazana je na slici 2., gdje su markeri prikazanikruiima postavljenim na sagitalnim projekcijama centra zglobova, a na zadnjoj stranikamere je prikazana slika koju ona vidi - x i y koordinate svakog markera.
Slika 2
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
15/172
15
2.1.2. Faza obrade
Osnovna karakteristika obrade rezultata eksperimentalne faze kod klasine kinematografskemetode je da se sve kinematike veliine dobijajukao njihove srednje vrijednosti unutar
pojedinih faza kretanja. Razlog tome je injenica da ni jedna od varijanti ove metode, koje su pomenute u prethodnom tekstu, ne omoguuje kontinualno praenje poloaja izabranog centrazgloba, teita ili promjene zglobnog ugla, ve njihove trenutne poloaje registruje samo poslije odreenog intervala vremena, dok tokom ovih intervala nema nikakvih podataka onjihovom kretanju. Zato se svaki od tih vremenskih intervala naziva fazom kretanja i imasvoju posebnu oznaku.
Osim ove metode, za mjerenje kinematikin veliina u jednom zglobu koristi se igoniometrijska metoda. Mehaniki goniometar se sastoji od dvije zglobljene lake poluge kojese fiksiraju za dva susjedna tjelesna segmenta. Promjena ugla u realnom zglobu koji spaja ovadva segmenta, prenosi se na poluge elektrogoniometra, u ijem se spoju nalazi mehaniikliza (ili slian ureaj) koji poslije izvoenja pokreta pokazuje njegovu amplitudu. Oviureaji su sline konstrukcije kao i njihovi mehaniki prethodnici,s tim to u spoju imajuelektrini pretvara koji je u stanju da kontinualno registruje promjene ugla tokom izvoenja pokreta. Na slici 3. je prikazan jedan od modernih elektrogoniometara sa elastinim spojem Bkoji mjeri promjenu ugla f izmeu uzdunih osa dva goniometrijska tijela A-A. Ovakvigoniometri mogu da se koriste istovremeno u vie zglobova, pri emu svaki od njih mjerirotaciju oko sve tri prostorne ose, tako da su veoma pogodni za ispitivanje kinematikesloenih pokreta.
Slika 3.Izgled goniometra
2.2. Mjerenja dinamikih veliina Od dinamikih veliina koje opisuju kretanje ovjekovog tijela, najee se direktno mjeri silai zbog togsa se ta metoda nazivadinamometrijom.
Platforma sile ( ili tenziometrijska platforma ) predstavlja mjerni sistem koji tokom izvoenjaeksperimenta registruje vektor sile kao jedinicu vremena, koja djeluje na povrinu platforme.
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
16/172
16
To znai da se istovremeno mjere sve tri komponente ovog vektora (Fx, Fy i Fz), kao lokacijanjegove napadne take-koordinate take na povrini platforme slika 4.
Slika 4.
Elektrini signali koje platforma sile poslije pojaavanja daje na svomizlazu kao direktnirezultat mjerenja, vrlo su pogodni za registrovanje ili dalju obradu modernim elektronskimsistemima. Zbog toga ove plaforme imaju iroku primjenu u mjerenjima sile relacije podloge pri fundamentalnim ili drugim sloenim kretanjima ovjeka, mjerenju udarnih impulsa (npr.impulsa udarca u boksu ili impusa lopte), kao u mjerenju sile interakcije ovjek- sprava (npr.fiksiranjem gimnastike sprave za platformu) slika 5.
Dinamogramom se izraavaju komponente sile u funkciji vremena. Zbog svoje jednostavnostiima iroku primjenu u testiranju fizikih sposobnosti u fizikoj kulturi i medicini. Jedandinamometar omoguuje mjerenje sile i njenog momenta kod samo jedne miine grupe uzadatim mehanikim uslovima. Naslici 5. dat je primjer maksimalne voljne izometrijske sileekstenzora u zglobu koljena pri zadatom poloaju tijela kakav se esto koristi u baterijamamotorikih testova. DinamometarD direktno mjeri silu koju ovi miii razvijaju prekosistema poluga. Meutim, poznavajui krak ove sile u odnosu na centar zgloba koljenar,mogue je izraunati momenat ove sile(M = F r).
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
17/172
17
Slika 5.
Postupak merjenja kinematikih i dinamikih parametara maksimalne brzine
Slika 6
2.3. Elektromiografska metoda (EMG metoda )
Ova metoda (skraeno EMG) se bazira na mjerenju bioelektrinih signala koji nastaju
protokom jona kroz membranu ekscitovane miine elije. Signal mjeren na elektrodama postavljenim na povrinu koe iznad tretiranog miia je kvazi periodinog oblika i njegov
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
18/172
18
izgled pri miinoj aktivaciji i relaksaciji je prikazan na slici 7.a Rektifikacijom ovogsignala (tj. ispravljanjem - slika 7.b) i filtrovanjem (tj. zaravnjivanjem, uklanjanjemnaizmjenine komponente signala- slika 7.c) dobija se oblik pogodan za procjenu stepenaaktivnosti miia, odnosno, sile i njenog impulsa tokom njegovog aktivnog mehanikogdjelovanja u sistemu tjelesnih poluga.
Zbog toga EMG mjerenja u biomehanikim mjerenjima daju podatke do kojih se ne moedoi na drugi nain. Naime, klasina biomehanika mjerenja mogu da pokau samo kolikorezultujui miini moment djeluje u nekom zglobu, ali ne i koji mii u njemu uestvuje.EMG metoda, meutim, ne samo da utvruje koji su miii aktivni pri odreenom pokretu,ve i koliko je vrijeme njihovog mehanikog djelovanja (interval t1 - t2, slika 7.c).
Uz to, mogue je procijeniti i miinu silu u bilo kom trenutku mjerenja, kao i njen ukupniimpuls (proporcionalan povrini osjenene povrine pod krivom) itd.
Slika 7
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
19/172
19
Slika 8
a) b)Slika 9
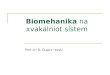
2.4. Savremeni biomehaniki mjerni sistemi
Sloenost aparata za kretanje ovjeka zahtijeva i sloene mjerne instrumente i sloene metodeza mjerenje njegovog kretanja.Ti zahtjevi mogu da se sistematizuju u etiri osnovnazahtjeva i to:
1. U eksperimentu se simultano mjeri veliki broj relevantnih veliina,
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
20/172
20
2. Na osnovu numerikih vrijednosti direktno mjernih, izraunavaju se i indirektnomjerne veliine,
3. Ovi rezultati se na pogodan nain registruju,
4. Eksperimentalni rezultati prikazuju se grafiki, tabelarno ili na neki drugi nain.
Takve mogunosti ne prua ni jedan pojedinani mjerni instrument pomenut ranije, ve se,kao i u drugim naunim disciplinama slinih zahtjeva, koriste tzv. mjerni sistemi. Njihov ulazini vei broj mjernih instrumenata koji simultano mjere relevantne veliine. Rezultatinjihovih mjerenja u obliku elektrinih signala naj prije prolaze tzv. fazu primarne obrade(pojaavanje, filtrovanje), a zatim se smjetaju u raunar.
Raunar istovremeno (on line) ili naknadno (off line) izraunava ostale veliine i prikazuje ih tabelarno i grafiki na monitorima, tampaima ili ploterima. Kao primjer moglo bi da poslui mjerenje na bilo kom sloenom kretanju ovjeka. Naime, da bi se o tom kretanjustekla to potpunija slika, mora se koristiti vei broj biomehanikih metoda.Elektrogoniometrima bi se direktno mjerili zglobni uglovi, EMG elektrodama aktivnostmiia, a tenziometrijskom platformom sila reakcije podloge. Ti podaci se najprije pojaavajui filtruju u svojim jedinicama, a zatim digitalizuju i memoriu u raunaru (tzv. akvizicija podataka preko analogno/digitalnog, ili krae A/D konventora). Poslije toga se iz direktnomjernih veliina izraunavaju indirektno mjerene.
Tako, na primjer, iz promjene zglobnih uglova izraunavaju se ugaone brzine i ubrzanja, izregistrovane EMG aktivnosti se izraunavaju periodi aktivnosti i n jihov intenzitet za pojedinane miie, a iz sile reakcije podloge odreuju se kinematika teita tijela i momentisila u pojedinanim zglobovima nogu. Na kraju, u visoko automatizovanom mjernom sistemu,neposredno po zavretku mjerenja mogue je dobiti i tabelarni i grafiki prikaz svih mjerenihveliina.
ematski prikaz ovakvog mjernog sistema dat je na slici 10
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
21/172
21
Slika 10
Osnovne komponente biomehanikog laboratorija
RAUNAR
Pojaiva Pojaiva Pojaiva
ELEKTROGONIOMETAR
ELEKTROMIOGRAF
PLATFORMA
SILE
MONITOR TAMPA PLOTER
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
22/172
22
Slika 11
2.5. Meunarodni sistem mjernih jedinica ( SI sistem )
Meunarodni komitet za tegove i mjere usvojio je 1960. godinemeunarodni sistemmjernih jedinica - SI (Systeme Internationale dUnits). Ovaj sistem osnovnih i izvedenih jedinica, kao i njihivih decimalnih umnoaka poeo se zvanino primjenjivati u naoj zemljiod 1.1.1981. godine. Prema odluci XIV generalne konferencije za mjere i utege odranoj1971. godine za osnovne veliine i osnovne jedinice SI -sistema, odabrane su veliine i jedinice date su u slijedeoj tabeli:
Tabela 1.
Naziv veliine Oznaka veliine Mjerna jedinica Oznaka mjerne jediniceDuina L metar M
Masa m kilogram Kg
Vrijeme t sekunda S
Termodinamikatemperatura
T kelvin K
Jaina struje I amper A
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
23/172
23
Jaina svjetlosti I kandela Cd
Koliina supstance n mol Mol
Pored ovih postoje i dvije dopunske veliine koje su prikazane u tabeli 2.
Tabela 2.
Naziv veliine Oznaka veliine Mjerna jedinica Oznaka mjerne jedinice
Ugao u ravni ,, radijan Rad
Prostorni ugao steradijan Sr
Za biomehaniarska mjerenja koristimo uglavnom ugao u ravni, posebno kod rotacionihkretanja, pa emo definisati jedinicu za mjerenje ugla. Radijan je ugao u ravni mjeren izmeudva poluprenika koji nma krunici isijecaju luk duine jednake polupreniku. Prema tomeslijedi: 1 rad = 1 m/1 m = 1. To znai da je radijan bezdimenziona jedinica. Pun ugao iznosi2r, a prav ugao /2 rad. Dozvoljena je upotreba jedinica za ugao-stepena. Pun ugao ima360, a prav ugao 90 stepeni. Omjer radijana i stepena je slijedei: 1 rad = 360/ tj. 1 rad =57,3 stepeni. Ostale jedinice u Meunarodnom sistemu mjernih jedinica su izvedeneizosnovnih, a slijedea tabela 3. prikazuje fizike veliine i njihove osnovne jednaine, koje su
najvie susreu u biomehanici.Tabela 3.
Fizika veliina i osnovna
jednaina
Naziv jedinice Oznaka Izraavanje u SI jedinicama
Duina i poluprenik rotacije r =1
metar M
Povrina P = 12 kvadratni metar m2
Zapremina V = 13 kubni metar m3
Frekvencija v = 1/t herc hz 1/s
Brzina v = s/t metar u sekundi m/s
Ubrzanje a= s/t2 metar u sekundi ms-1
Ugaona brzina =/t =v/r metar sekundi nakvadrat
ms-2
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
24/172
24
Ugaono ubrzanje = /t2= a/r radijan u sekundi nakvadrat
rad s-1
Centralno ubrzanje ar = v2/r=2r metar u sekundi nakvadrat
rad s-2
Gustina = m/V kilogram u kubnommetru
Kgm-3
Sila F= ma njutn N kgms-2
Teina G= mg njutn N kgms-2
Sila trenja Ftr = k tr N njutn N kgms-2
Centralna sila Fc= mv2/r= m2r njutn N kgms-2
Sila elastine deformacijeFe=k eDx
njutn N kgms-2
Pritisak p= F/S paskal Pa Nm-2=m3kgs-1
Impuls J=Ft=mv njutn sekund ilikilogram metar u sec.
Ns=kgms-1
Moment inercije I=mr 2 kilogram metar nakvadrat
kgm2
Moment sile M=Fr=Ia njutn metar Nm=kgm2s-2
Moment impulsa K= J/r njutn sekund u metruili kilogram u sekundi
Nsm-1=kgs-1
Rad A=Fs dul J Nm=m2kgs-2
Kinetika energija Ek= mv2/2 =Iv2/2
dul J m2kgs-2
Potenc.en. Ep= mgh=Gh dul J m2kgs-2
energija eastine deformacijeEe=kex2/2
dul J m2kgs-2
Snaga P=A/t=Fv vat W J/s=m2kgs-2
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
25/172
25
3.ELEMENTI I FUNKCIJA LOKOMOTORNOG APARATA
Lokomotorni aparat ovjeka (LMA) predstavlja njegov kotano - zglobno -miini sistemkoji mu omoguava promjenu poloaja u prostoru i sve druge voljne mehanike pokrete.On se
sastoji iz dva dijela i to: aktvni i pasivni dio.U aktivni dio aparata za kretanje spadaju miii, i to skeletni miii jer jedino oni posjedujuvlastitu motoriku, dok njegov pasivni dio ine kosti i zglobovi.
2.6. Kosti
2.6.1. Anatomija kostijuSavrena ravnotea izmeu razliitih vrsta tkiva zasluna je za udesnu lakou i otpornostkosti. Dok joj je unutranjost spuvasta, lagana i elastina, vanjski slojevi kosti moraju bitivrsti kako bi zaitili krvne ile i dragocjenu kotanu sr.Kotana sr je tvornica u kojojnastaju sva krvna tjelaca.
Ploice kotanog tkiva (lamele) su zbijene na povrini kostiju (zbijeno tkivo), a u njenojdubini one obrazuju kotane gredice koje su meusobno isprepletene i odvojene upljinicama(sunerasto kotano tkivo), u kojima se nalazi kotana sr. Svaka kost je po cijeloj povrini prekrivena pokosnicom ukojoj se nalaze mlade kotane elije (osteoblasti). U dubini kostijunalaze se krupnije kotane elije (osteoklasti) koje rastvaraju kotano tijelo. Ovakvaantagonistika uloga dviju vrsta kotanih elija omoguava svakoj kosti osnovnu vitalnost.Svaka kost se u toku ivota istovremeno neprekidno rui i obnavlja (periostalna geneza).
2.6.2. Oblik i funkcija kostijuKosti, uz zglobove, predstavljaju pasivni dio lokomotornog aparata jer ne generiu sopstvene,ve prenose spoljne sile. Sa biomehanikog aspekta kosti su krute, kotane poluge ija jeosnovna funkcija prenoenje miinih i drugih sila a ime se obezbjeuje odravanje raznihravnotenih poloaja, eljenih pokreta, prostijih i sloenijih kretnih zadataka.
Dakle kosti daju oslonac tijelu za njegove svakodnevne motorike zadatke.
Kad se dijete rodi ima 350 kostiju. Kod odraslih ljudi ima 206 kostiju. 5% ljudi raa se sa jednom do 12 kostiju vika.
Osnovna podjela kostiju vri se na osnovu njihove forme.
Prema formi kosti se dijele na :
kratke kosti, duge kosti, pljosnate kosti.
Kratke kosti se nalaze na zavrecima ekstremiteta i u sastavu kimenog stuba.Kod kratkih
kostiju sve tri dimenzije su sline.
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
26/172
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
27/172
27
Svaki zglob e posjedovati veu radnu sposobnost, ako je u njemu manje trenje. Manje trenjee biti ako u zglobu vlada manji pritisak,a manji pritisak e biti ako je zglobna povrina vea.Duge kosti nisu ni sasvim ravne. One imaju luni oblik da bi se lake i sa umjerenimelasticitetom, suprostavile pritiscima kojima su izloene po uzdunoj osi kosti. Definitivno jedokaznao da se taj luk formira tokom ivota kao odgovor na spoljne sile koje dijeluju naovjeka. I pored elasticiteta cjevastih kostiju, u biomehanikim analizama ih posmatramo kaosavreno krute poluge. Kada se sila koja djeluje na kost povea do te mjere da ona vienemoe odgovoriti elastinom reakcijom, ista prelazi u plastinu.
Proces kotaneadaptacije je vrlo spor proces. Smatra se da tipina zakrivljivanja dugih kostijutraju cijelog ivota. Pored toga, dokazano je da procesovravanja kostiju treningom i procesdekalcifikacije po prestanku treninga mjeri godinama. Naravno prosec kalcifikacije je punosporiji od procesa dekalcifikacije. O ovakvim pojavama moramo voditi rauna u planiranjusportskog treninga i primjeni kineziterapije u rehabilitaciji. Iz ovakvog procesa proizilazi i
fenomen neusklaenosti vrstoe pojedinih elemenata lokomotornog aparata, kod mladihsportista, to moe za posljedicu imati akutne i hronine povrede.
2.6.5. Kosti kao poluge
Mehanike osobine poluga poluge lokomotornog aparata
U optem znaenju polugu predstavlja svaki tap koji je u jednoj taki vezan tako da se okonje moe obrtati. Svaka cjevasta kost u sastavu dijela tijela ili sistema kratkih kostiju u
sastavu dijela tijela u aparatu za kretanje ponaaju se kaopoluge. Da bi se moglo pristupitianalizi uzroka mirovanja i kretanja pojedinih dijelova tijela i cijelog tijela neophodno je poznavati te proste maine i sve zakonitosti u vezi sa njima. Svaki tap koji je u jednoj svojojtaci vezan i oko nje se moe obrtati predstvlja prostu mainu ili polugu.
Da bi se uspostavila ravnotea na jednoj poluzi neophodno je da na nju djeluju najmanje dvijesile, a to su :sila gravitacije (zemljine tee) i sila miia kod lokomotornog aparata.
Taka gdje je poluga privrena naziva setaka obrtanja ili taka oslonca. Svaka siladejstvuje na polugu od take oslonca na odreenom rastojanju, odnosno kraku. Najkrae
rastojanje od take oslonca do napadane linije sile naziva sekrak sile. To je upravnorastojanje od take oslonca do napadne linije sile.
Da bi dva tereta ili teret i sila bili u ravnotei potrebno je da njihova rezultanta prolazi kroztaku oslonca (taku obrtanja).
Uslov ravnotee jeG x g = Mx f
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
28/172
28
Slika 12
Vrste poluga:
jednokraka poluga, dvokraka poluga.
Dvokraka poluga je poluga kod koje sile djeluju u istom smjeru, nalaze se sa suprotnihstrana take oslonca.
Primjer dvokrake poluge u lokomotornom aparatu ovjeka je poloaj glave u potiljanom zglobu u normalnom uspravnom stavu.
Slika 13
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
29/172
29
Teite glave predstavlja napadnu taku sile gravitacije,
Centar oslonca je centar potiljanog zgloba,
g - krak sile gravitacije,
Sila miia opruaa u potiljanom zglobu, koja se odreuje fiziolokim presjekom, a njenanapadna taka je centar pripoja u potiljanom zglobu.
Jednokraka poluga je poluga kod koje sile dejstvuju u suprotnom smjeru, a nalaze se sa istestrane take oslonca.
Blia sila od take oslonca je vea, a udaljenija sila od take oslonca je manja.
Sila gravitacije (G), dejstvuje uvijek vertikalno na dole,
Silamiia (M), bar jednom svojom komponentom dejstvije vertikalno na gore.
Jednokrake poluge se dijele na:
poluge brzine (poluge III.reda) poluge sile (poluge II.reda)
Poluge brzine su takve kod kojih sila miia dejstvuje blie taci oslonca.
Slika 14
Primjer poluge brzine u satavu aparata za kretanje ovjeka je potkoljenica sa stopalom.
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
30/172
30
Slika 15
Sila gravitacije (G), prdstavlja teina potkoljenice i stopala, ija je napadna taka zajednikoteite potkoljenice i stopala. Krak sile (g), jenajkrae rastojanje od centra obrtanja donapadne linije sile gravitacije. Sila miia (M), predstavlja silu miia pregibaa u zglobukoljenaa njenu napadnu taku centar prifernog pripoja tih miia koji se nalaze na zadnjojstranigornjeg okrajka potkoljenice. Krak sile miia (f), predstavlja najkrae rastojanje povueno od centra obrtanja do napadne linije sile miia. Centar obrtanja je centar zglobakoljena. Da bi se potkoljenica odrala u datom poloaju, potrebno je da sila miia (M) budetoliko putavea od sile tee (G), koliko je puta krak sile miia manji od kraka sile tee.
Poluga sile je takva poluga kod koje sila miia (M), dejstvuje dalje od take oslonca.
Slika 16
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
31/172
31
Primjer poluge sile u satavu aparata za kretanje ovjeka je podlaktica sa akom.
Silu gravitacije (G), prdstavlja teina podlaktice i ake, ija je napadna taka zajednikoteite podlaktice i ake. Krak sile (g), je najkrae rastojanje od centra obrtanja do napadnelinije sile gravitacije. Silu miia (M), predstavlja tangencijalna komponenta ramenini-binog miia, a njena napadna taka je u centru perifernog pripoja na distalnom dijelu podlaktice. Krak sile miia (f), predstavlja najkrae rastojanje povueno od centra obrtanjado napadne linije sile miia. Centar obrtanja je centar zgloba lakta.
2.7. Zglobovi
Zglob je mjesto gdje se spajaju dvije ili vie kostiju od kojih je obino okrajak jedne kostiispupen i naziva se glava kosti, a okrajak druge kosti i udubljen i predstavlja aicu kosti. Omoguavaju kostima da se nesmetano pokreu u raznim pravcima, da se vri bezbrojkompleksnih pokreta u gotovo svim pravcima i to vrlo glatko i uz veoma malo trenja.
Ovo se postie zahvaljujui tome to su krajevi kosti koje su meusobno povezane zglobom prekrivene hrskavicom koje se taru jedna o drugu.
Osim toga, u zglobu se nalazi bjeliasta, tzv. sinovijalna tenost, gusta kao ivo bjelance kojaima ulogu "ulja za podmazivanje" kao kod maine, jer smanjuje trenje.
Sinovijalna tenost se stvara kretanjem, pa ukoliko je ono onemogueno, stvara se veomamalo ove tenosti i zglobovi se oteno kreu.
Slika 17
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
32/172
32
3.2.1. Prema mogunosti kretanja mogu biti:
Nepokretni zglobovi, Polupokretni zglobovi, Pokretni zglobovi,
Nepokretni zglobovi Nisu od neposrednog interesa zarealizaciju lokomotornih funkcija. Oni predstavljaju uroenesrasline, i to kotane (krsni prljenovi), hrskavine(zavretak kotanih dijelova prednjihkrajeva rebara; preponska simfiza) i vezivne (avovi lobanje) prirode. Njihova je funkcija uosnovi statika, pomou njih se vie vri privrivanje nego kretanje.
Polupokretni zgloboviVezuju kratke kosti snanim zglobnim aurama i vezama.Kod ovih zglobova kosti su spojene
meukotanim vezama ili hrskaviavim kosturom.To su zglobovi izmeu kostiju ruja idoruja,noja i donoja,kimenih prljenova i sl.
Pokretni zgloboviTo su centri pokreta u aparatu za kretanje.Obuhvataju najmanje dva kotana okrajkauglavnom dugih kostiju.U nekim zglobovima se nalaze vezivno -hrskavine ploe ( diskusi,meniskusi ), radi upotpunjavanja kontakta izmeu zglobnih povrina.
3.2.2. Prema pravcima moguih kretanja, pokretni zglobovi mogu biti:
jednoosovinski zglobovi, dvoosovinski zglobovi, troosovinski zglobovi,
Jednoosovinski zglobovi (cilindrini) su zglobovi u obliku arke (na vratima). Jedan kotaniokrajak jednoosovinskog zgloba je valjkasto ispupen,a drugi odgovarajue valjkastoizdubljen. U takvom zglobu jedino kretanje predstavlja rotacija oko jedne ose.
Na slici 18. prikazan je uproen model jednoosovinskog zgloba.
Slika 18
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
33/172
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
34/172
34
Varijacija odvoenje - privoenje je suprotstavljanje (opositio) i pokret suprotansuprostavljanju (repositio).Ove pokrete vri palac ruke kada se kree ka malom prstu iudaljava od njega.
3.2.3. Vrste pokreta u zglobovima
ovjek se kree u tri ravni prirodnog koordinatnog sistema i tom prilikom se vre obrtanjaoko sve tri ose tog sistema.
Slika 20
Sagitalna ravan Frontalna ravan Horizontalna ravan
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
35/172
35
a) b) c)
Slika 21
eona ili frontalna ravan, ( F ),dijeli ovjeiji aparat za kretanje na prednju i zadnju polovinu,ukoliko prolazi kroz teite tijela u normalnom uspravnom stavu,Pokreti u eonojravni su pokreti desno - lijevo.
Sagitalna ili profilna ravan, ( S ),dijeli ovjeiji aparat za kretanje na desnu i lijevu polovinu.Pokreti u sagitalnoj ravni su pokreti naprijed - nazad.
Horizontalna ili vodoravna ravan, ( H ), dijeli ovjeiji aparat za kretanje na gornju i donju polovinu.
eona (frontalna ) osa (fr), se prostire lijevo- desno i poloena je u eonoj ravni.Okretanjeoko eone ose vri se u sagitalnoj ravni.
Sagitalna (profilna) osa (Sa), se prostire naprijed - nazad i poloena je u sagitalnojravni.Okretanje oko sagitalne ose vri se u eonoj ravni.
Vertikalna osa (Vr), se prostire gore - dole.Okretanje oko vertikalne ose vri se uhorizontalnoj ravni.
3.2.4. Osnovni pokreti u zglobovima su:
pregibanje (flexio), odvoenje (abductio), okretanje (rotatio) u polje, opruanje (exstensio), privoenje (aductio), okretanje (rotatio) unutra.
3.2.5. Mehanike osobine zglobova
vrstina je obezbijeena zglobnim uvrivaima (stabilizatorima) koji mogu biti aktivni i
pasivni.Aktivni uvrivai su miii.Upasivne uvrivae spada zglobna ahura, zglobneveze unutar i van zglobne ahure.
Pokretljivost u zglobu zavisi os konstrukcije i duine stabilizatora. Ako su polupreniciispupenosti ili izdubljenosti zglobnih povrina manji bie manja i pokretljivost, ali zato veavrstina i obratno.Uodnosu na stabilizatore vai pravilo da ako su stabilizatori dui, pokretljivost je vea.Da bi se za odreeni zglob obezbijedila i vrstina i pokretljivostneophodno je tjelesno vjebanje.
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
36/172
36
Zglobni sistem (Juncturae ili systema articulare) ine zglobovi i njima pridruene kosti isveze.
Graa i podjela spojeva izmeu kostiju: Juncturae ossium, spojevi meu kostima, dijele se udvije osnovne skupine prema tkivukoje spaja kosti:
Synarthrosis (sinartroza) je nepokretni kotani spoj, koji moe bitivezivni (juncturafibrosa), hrskavini (junctura cartilaginea), i kotani(junctura ossea).
Junctura synovialis (articulatio ili diarthrosis, diartroza) je pokretni kotani spoj, tj. zglob pravom smislu.
Junctura ossea (synostosis), kotani spoj
Slika 22 Dijelovi sinovijalnog zgloba.
http://hr.wikipedia.org/wiki/Kostihttp://hr.wikipedia.org/wiki/Kostihttp://hr.wikipedia.org/wiki/Kostihttp://hr.wikipedia.org/wiki/Tkivohttp://hr.wikipedia.org/wiki/Vezivno_tkivohttp://hr.wikipedia.org/wiki/Hrskavicahttp://hr.wikipedia.org/wiki/Hrskavicahttp://hr.wikipedia.org/wiki/Hrskavicahttp://hr.wikipedia.org/wiki/Kosthttp://hr.wikipedia.org/wiki/Datoteka:Illu_synovial_joint.jpghttp://hr.wikipedia.org/wiki/Kosthttp://hr.wikipedia.org/wiki/Hrskavicahttp://hr.wikipedia.org/wiki/Vezivno_tkivohttp://hr.wikipedia.org/wiki/Tkivohttp://hr.wikipedia.org/wiki/Kosti8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
37/172
37
Slika 23
Terminologija za opisivanje pokreta i kretanja
U odnosu na horizontalnu ravan:
Kranijalno - ono to je blie glavi (cranium = lobanja),
Kaudalno - ono to je blie nogama (cauda = rep).
U odnosu na sagitalnu ravan:
Medijalno - dijelovi blii sagitalnoj ravni koja prolazi kroz TT,
Lateralno - dijelovi dalje od centralne sagitalne ravni.
U odnosu na eonu ravan:
Ventralno -dijelovi ispred eone ravni (venter = trbuh),
Dorzalno -dijelovi iza eone ravni (dorsum = lea).
Za ekstremitete postoje termini:
Proksimalno -taka blie trupa,
Distalno -taka dalje od trupa.
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
38/172
38
Volarna strana - strana ruke koja se nastavlja u dlan,
Tabanska strana stopala -se oznaava kao plantarna strana (planta = taban),
Suprotna strana volarnoj i tabanskoj tj. plantarnoj naziva se
dorzalna,
Duboki sloj = profundus = dubok,
Povrinski sloj = superficialis (superficium = povrina)
Miii
3.3.1. Osobine miinog vlakna
Skeletni miii sastoje se od mnogo hiljada paralelnih i na razne naine grupisanih miinihvlakana. Svako miino vlakno ima jednistveno svojstvo da se usljed fizikohemijskih procesa koji se u njemu odigravaju, gri (kontrahuje) i oputa. Jedno miinovlakno, kada je potpuno oputeno i nije optereeno nekim teretom s polja, sem sopstvenom teinom, nalazi seu odreenom napetom stanju. To stanje se nazivat o n u s i predstavlja povoljnu osnovu za brzu kontrakciju. Kada miino vlakno primi elektrini stimulus preko nerva koji je za njega pripojen, on e se kontrahovati. Prilikom svoje maksimalne kontrakcije vlakno se prosjenoskrati za jednu treinu svoje duine koju je imalo u neaktivnom (distrahovanom) stanju. Ako
se nekom spoljanjom silom mii ratsegne, njegova se duina opet poveava za jednu treinuosnovne duine. Na osnovu navedenog, maksimalna duina spoljanjom silom rastegnutogmiinog vlakna (i itavog vretenastog miia), i minimaln aduina kontrahiranog vlaknastoje u odnosu kao 2 : 1.
3.3.2. Vrste skeletnih miia
Da bi se moglo ukazati na specifinost djelovanja pojedinih miia, neophodno je prethodnoizvriti klasifikaciju skeletnih miia prema njihovom obliku i pravcu pruanja njihovihvlakana. U tom smislu se svi skeletni miii mogu podijeliti na: vretenaste, peraste, lepezaste ietvrtaste miie.
Vretenasti miii se odlikuju velikom duinom miinih vlakana. Ovi miii najmanjeodstupaju od pravila simetrije. Rezultanta njihovog djelovanja se u osnovi poklapa sauzdunom osom miia. Pripoji su svedeni na najmanju povrinu te se geometrijski moguuporediti sa takama pa je lako odrediti rezultantu povlaenjem linije od take jednog dotake drugog pripoja. Intenzitet se odreuje veliinom fiziolokog presjeka. Snana trakcijanije odlika ovih miia, ali zato moe djelovati na dugom putu koliko se izgubi na sili, dobijase na putu odnosno brzini.
Perasti miiise odlikuju kratkim vlaknima. Imaju specifinu grau. Tetiva se duboko uvlaiu centralni dio miia tako da se miina vlakna pruaju koso u polje. Vlakna su kratka, ali ih
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
39/172
39
ima mnogo. Rezultanta se odreuje povlaenjem linije od centra jednog do centra drugog pripoja. Intenzitet se odreuje fiziolokim presjekom koji je veliki zbog broja vlakana pa su perasti miii snani miii. Fizioloki presjek bi imao oblik omotaa kupe. Prilikom radazbog snane trakcije dobija se na sili, a izgubi na putu, odnosno brzini. Kod perastih miia sesile miinih vlakana ne slau u R sile miia, ve se sila svakog vlakna razlae nakomponente. Komponente upravne na pravac prostiranja miia se potiru, a komponente paralelne sa tim pravcem se sabiraju i njihov zbir predstavlja R djelovanja perastog miia.
Lepezasti miii bi se geometrijski mogli predstaviti trouglom, gdje bi se jedan pripoj mogaouporediti sa takom, a drugi sa linijom. Miina vlakna se zrakasto koncentriu od pripoja kojiima oblik linije ka pripoju koji ima oblik take. Vlakna su obino grupisana u snopove.
etvrtasti miiise geometrijski mogu uporediti sa hvadratom ili pravougaonikom, a njihovi pripoji sa linijama. Miina vlakna su uspravna na linije miinih pripoja, dok su meusobno paralelna.
I lepezasti i etvrtasti miii imaju pljosnati oblik koji se u evoluciji ovjeka formirao usmislu odgovaranja na potrebe za raznovrsnom kontrakcijom, u smislu formiranja vrlo blagihoblina koje jedinki ne smateju da se provlae kroz razne sredine, da ne ometaju pokretenajveih amplituda.
3.3.3. Miina sila kao vektor
Mii predstavlja silu i kao takav izraava se kao vektor. U biomehanici se susreemo sveliinama koje nazivamo skalari i vektori, pa je iz tog razloga potrebno podsjetiti se na to ta
su skalari, a ta vektori.Skalari ili skalarne veliine su takve veliine koje su potpuno odreene svojom brojanomvrijednou (ime im potjee od mjesta na skali brojeva). Tako su npr. skalarne veliinevrijeme,temperatura, masa, specifina teinaitd. Poto su skalari pozitivni ili negativnirealni brojevi, raunanje se izvodi na isti nain kao i sa spomenutim brojevima.
VEKTORI OSNOVNI POJMOVI
Veliki broj zakona u mehanici moe se predstaviti preko objekata koji se kreu pravolinijski.Meutim, u kineziologiji se susreemo sa mnogo sloenijim kretanjima koji seodvijaju po horizontali i po vertikali, kao to su skokovi, bacanja, udarci, umjetniko klizanje,akrobatika itd.Definisanje poloaja, brzine i ubrzanja kao i njihove veze mogue je prikazati pomou vektora.
Vektori ili vektoreske veliine su fizike veliine koje su definisane brojnom vrijednou(intenzitetom), pravcem i smjerom. Dakle, za razliku od skalara, vektori pored brojnevrijednosti (intenzitet, apsolutna vrijednost),imaju dodatne karakteristike koje ih odreuju, ato su pravac i smjer.Vektorsku veliinu ili vektor grafiki predstavljamoorijentisanom duiiji pravac prikazuje pravac vektora, strelica oznaava smjer vektora,a veliina duine
njegovu brojnu vrijednost (kod miia, intenzitet).
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
40/172
40
A B
U tom sluaju elementi vektora su:
(AB) - predstavlja intenzite t, to je duina linije vea vei je intenzitet,
(A) - predstavlja napadnu taku,
Lijevo i desno od napadne take, po liniji do u beskonanost, u vezi s im se izraavamo usmjeru ili u istom pravcu odnosno u suprotnom smjeru-pravcu) predstavlja pravac
djelovanja sile, ili napadnu liniju sile.
Od (A) do( B) predstavlja smjer djelovanja.
Primjeri primjene vektora u razliitim kineziolokim aktivnostima, nain njihovogobiljeavanja praktino korienje moe se vidjeti na slikama .?
Jedinini vektor je vektor jedinine duine i zove se ort vektor.
Operacije i primjena vektora
Jednakost vektora
Za dva vektora a i b kaemo da su jednaka, ako imaju vrijednost i isti smjer, tada vai a = 6.
Sabiranje vektora
Sabiranje vektora se moe vriti na osnovu nekoliko pravila i to:
-pravilo trougla,
-pravilo paralelograma,
-pravilo kosinusa i
-pravilo mnogougaonika.
( ubaciti slike i objanjenje iz knjige biokinematika sporta str.241 )
Oduzimanje vektora
Oduzimanje dva vektoraa i b je slino sabiranju i u sutini predstavlja uvoenje negativnogvektora, tj. promjenu smjera postojeeg.
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
41/172
41
U biomehanici koristimo vektorske veliine kao to su:sila, brzina, ubrzanje, uglovna
brzina, moment sile, moment spregaitd.Vektori se obino klasificiraju na dva naina.
Prvi nain je taj da se vektori dijele na: vektore vezane za taku, klizee vektore i slobodnevektore.
Druga klasifikacija diferencira vektore napolarne i aksijalne.Tako su npr. polarni vektori: brzina, ubrzanje, sila, vektor poloaja itd., a aksijalni (osni) vektori:uglovna brzina, ugaonoubrzanje, moment sile, moment impulsai dr.
Kao i svaka sila, i sila miia moe se posmatrati kao kao uzrok koji je u stanju da promijenistanje mirovanja ili stanje kretanja nekogtijela. U statici je sila vektorska veliina i odreena je sa etiri elementa, pa je prema tome i silu miia neophodno odrediti pomou istihelemenata.
Mii u cjelini kao silu predstavlja sveukupan broj i raspored njegovih vlakana, intenzitetnjihovog djelovanja, pravac djelovanja, smjer i smisao djelovanja i napadnu taku sile miia.
Intenzitet miinog djelovanja se mjeri teinskim jedinicama kako za razliite miie usastavu jedne jedinke, tako i za iste miie u sastavu raznih jedinki. Intenzitet miia variraod 6 do 14 kiloponda na kvadratni centimetar povrine fiziolokog presjeka. Povrinafiziolokog presjeka se dobija kada se izvri presjek miia upravo na svako vlakno. Ovaveliina nije uvijek ista za razne miie jednog organizma i za iste miie raznih organizama.Intenzitet miia zavisi od konstitucije jedinke, od stanja treniranosti i sl.
Dakle, kod skeletne muskulature intenzitet djelovanja se dozira, regulie dok kod sranogmiia koji radi po zakonu sve ili nita, svaka kontrakcija (faza sisole) vri se maksimalnimintenzitetom.
Smjer djelovanja miia je od pokretnog ka nepokretnom pripoju tog miia (od mobilnog kafiksnom dijelu).
Napadna taka sile miia nalazi se u centru pokretnog miia pripoja. Ona je blie odreenatakom gdje kroz povrinu pokretnog pripoja prolazi miina rezultanta.
Napadna linijaili pravac se poklapa sa rezultantom svih djelujuih miinih vlakana.
U odnosu na posljedice koje mogu izazvati vektori koji djeluju na neko tijelo materijalne prirode, vektor i se mogu podijeliti na klizee vektore, vektore vezane za taku i na slobodne
vektore.
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
42/172
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
43/172
43
je inervacioni odnos manji, to je nervna kontrola finija, a pokreti precizniji i boljekoordinirani. Inervacioni odnos se moe utvrditi brojanjem miinih vlakana na miinom preparatu pod elektronsikim mikroskopom. Tako je utvreno da m.soleus i ekstenzori stopalaimaju inervacioni odnos 1:120, m.extensor dig.longus i ekstenzori prstiju stopala imaju odnos1:165.
Sva ispitivanja izvrena u ovom pravcu nedvosmisleno pokazuju da postoji jasan odnosizmeu brzine pokreta i odnosa inervacije i strukturnih svojstava miia, kao to su intenzitet poprene ispruganosti i odnos bijelih i crvenih vlakana.
Zakon sve ili nita
Posredstvom alfa-motoneurona iz kr upnih motornih elija prednjih rogova kimene modine, polaze nadraaji koji dovode do kontrakcija miinih jedinica.
Kontrakcija miine jedinice se nemoe izazvati, ako je jaina drai ispod odreenog nivoa. Najmanji nivo drai koji dovodi do kontrakcije naziva se prag nadraaja. Kada se postigne prag nadraaja neuromiina jedinica se kontrahuje maksimalno. To znai da se kontrahujusve miina vlakna intervisana tom nervnom elijom i to maksimalnom snagom.
Ako bi se intenzitet nadraaja dalje pojaavao, kontrakcija neuromiine jedinice bi ostalaista, jer se ve maksimalno kontrahovala na pragovnoj drai. Meutim, poveanjemintenziteta drai, poveavao bi se broj neuromiinih jedinica koje se kontrahuju i to onoliki broj neuromiini jedinica za koliko puta je poveana pragovna vrijednost u toj drai. Ako bidra bila manja od pragovne, do kontrakcije ne bi dolo. Meutim, ako se subpragovne drai
ponavljaju odreenom brzinom dolazi do njihovog sumiranja (sabiranja) i na taj nain se postie prag nadraaja koji izaziva kontarkciju neuromiine jedinice. Drugim rijeima,neuromiina jedinica se kontrahuje po zakonu sve ili nita i u zavisnosti od intenziteta, jaine, drai samo do nivoa pragovne vrijednosti, kada se kontrahuje maksimalno. Dalje poveanje veliine drai je bez uticaja na kontrakciju neuromiine jedinice, ali je u direktnojsrazmjeri sa brojem angaovanih miinih jedinica, to je znaajno za snagu i veliinumiine kontrakcije. to je vei intenzitet nadraaja vei je broj angaovanih miinih jedinica, pa samim tim bit e vea i snanija miina kontrakcija.
Gama moto neuron
Gama nervna vlakna takoer polaze iz motornih elija prednjih rogova kimene modine izavravaju se u miiu u neuromiinom vretenu. Nervne elije iz kojih polaze gama vlaknasu sitnije i nadraljivije , nego nervne elije iz kojih polaze Alfa vlakna. Gama vlakna donoseimpulse iz sitnih motornih elija prednjih rogova u posebna vlakna skeletnog miia nazvanaintrafuzalna vlakna, koja predstavljaju dio neuromiinog vretena. Impulsi koji idu Gamavlaknima, sinhronizovani su vremenski, po broju i intenzitetu sa impulsa koji idu Alfavlaknima. Efekat njegovog djelovanja ispoljava se na miinim vlaknima, odnosnoneuromiinoj jedinici i neuromiinom vretenu, istovremeno.
Uloga neuromiinog vretena
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
44/172
44
Neuromiino vreteno, predstavlja specijalnireceptor, koji i igra vrlo znaajnu ulogu ukontroli motorike.
Miii i tetive sadre u velikom broju, dvije posebne vrste receptora, koji funkcioniu ispodnivoa svijesti, pa prema tome ne dovode do svjesnog uoavanja njihove funkcije.
To su:
- Neuromiina vretena, koja su razbacana po miiu i postavljena po njegovoj uzdunojosovini, koja reaguje na promjenu duine miinih vlakana i na brzinu kojom se brzinamijenja.
-Goldijev tetivni aparat, receptori dubokog senzibiliteta, (proprioceptori), razbacani pomiinim tetivama, postavljeni uspravno na uzdunu osovinu miia, koja reaguje na promjenu napetosti u miinim tetivama, za vrijeme k ontrakcije ili istezanja miia.
Graa neuromiinog vretena
Neuromiino vreteno ini grupa od 3-10 izmjenjenih miinih elija, tzv. intrafuzalnihmiinih vlakana. Ona se na krajevima stanjuju i privruju na ovojnicu miinih elijamotornih jedinica izmeu kojih su smjetene. Interafuzalno miino vlakno je izmjenjeno ivrlo maloskeletno miino vlakno. U srednjem dijelu svakog od tih intrafuzalnih vlakana,koja ine vreteno, ima samo nekolliko aktinskih ili miozinskih niti, ili ih uopte nema. Prikontrakciji intrafuzalnih vlakana, odnosno neuromiinog vretena, ovaj dio se ne kontrahuje.U tom dijelu su smjetena elijska jedra i odatle polazi senzitivni nervi Gama sistema. Gamamotorna vlakna ko ja dolaze iz prednjih rogova kimene modine, ulaskom u mii, granaju sei interviu krajeve neuromiinog vretena koji predstavljaju kontraktilni dio. Jedno Gamanervno vlakno intervie jednoneuromiino vr eteno.
Podjela intrafuzalnih vlakana
Prema broju i rasporedu elijskih jedara, razlikuju se dvije vrste intrafuzalnih vlakana.
1) Vlakna sa jedrima u vreici (jedno od tri vlakna) u kojima je veliki broj jedra sabijen usredini suenog dijela intrafuzalnogvlakna, kao u vreici.
2) Vlakna sa jedrima u lancu (tri do sedam) su upola tanja i kraa od vlakana sa
jedrima u vreici. Njihova jedra su rasporeena u nizu, cjelom duinom suenja.
Senzitivna vlakna Gama sistema
U suenom dijelu intrafuzalnih vlakana, gdje su sm jetena elijska jedra, nalazi se receptorskaregija, odakla polaze senzitivna vlakna Gama sistema. Postoje dva tipa senzitivnih reciptora:
primarni ili anlospiralni i sekudarnih ili kitiasti.
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
45/172
45
Primarni zavretak
Primarni ili anulospiralni zavretak, spiralno se obavija oko jedra obje vrste intrafiulnihvlakana u sammoj sredini receptivnog polja. Odatle dolaze debela vlakna tipa Ia promjera odoko 17 mikrona ulaze u zadnje rogove kimene modine, nastavljajui direktno do prednjihrogovakimene modine, kao monosinaptina vlakna.
Sekundarni zavretak
Sekundarni zavretak, ine obino dva tanja senzorina nervna vlakna tipa II, prosjenedebljine od oko 8 mikrona. Pod mikroskopom imaju izgled cvjetnih granica, zbog ega senazivaju jo ikitiasti zavreci, ma da i oni obavijaju intrafuzalna vlakna na isti nain kaovlakna tipa Ia. Ova vlakna su gotovo iskljuivo na jedrima u lancu. Odatle polaze senzitivninervi Gama sistema, koji ulaze u kimenu modinu u predjelu zadnjih rogova gdje se prekidaju kao i polisinaptini neuron, preko umetnutih, intersticijalnih neurona, uspostavljaju
kontakt sa motornim elijama u prednjim rogovima kimene modine. Funkcija neuromiinog vretena
Budui da su intrafuzalna vlakna sa jedrima u lancu inervisana, primarnim i sekundarnimzavrecima, smatra se da su ona odgovorna za statistiku reakciju (statistika kontrakcija).Interafuzalna vlakna sa jedrima u vreici, intervisana su samo primarnim zavrecima iodgovorna su za snanu dinamiku reakciju (dinamik a kontrakcija).
U normalnim uslovima neuromiino vreteno neprekidno alje impulse, gama eferentnim(senzitivnim) vlaknima u zadnje rogove kimene modine. Impulsi su slabog intenziteta, alistalno prisutni. Istezanjem miinog vretena poveava se intenzitet broja impulsa koji seupuuju prema kimenoj modini, a skraivanjem neuromiinog vretena taj broj se smanjuje.Prema tome, neuromiino vreteno je specijalni receptor koji reaguje kako na promjenunepetosti u miiu tako i na promjenu njegove duine.
Kad god se signali iz kore ili bilo kog drugog dijela mozga prenose do alfa-motoneurona,uvijek se gotovo istovremeno nadrae i gama-motoneuroni, to nazivamo koaktivacija. Touzrokuje istovremenu kontrakciju neuromiinih jedinica i neuromiinog vretena. Takvo ponaanje oba sistema najvjerovatnije ima dvojaku ulogu.
Prvo ne doputa miinom vretenu da se suprostavi kontrakciji miia.
Drugo, odrava odgovarajui stepen priguivanja i reaktivnosti miinog vretena naoptereenja bez obzira na promjene duini miia.
Program dobijen iz vie djelova CNA-a dalje se u miiu kontrolie preko neuromiinogvretena i Godijevog tetivnog aparata, na nivou kimene modine. Kontrola se vri posredstvom refleksa na istezanje i optereenjem i smislu nadraaja (exscitatio) i priguenje(inhibitio). Neuromiino vreteno i Godijev aparat, u slobodnoj interpretaciji, ponaajuslino termostatu (termostat u bojleru). Dok tee zadati program impulsa, fiziko stanjemiia odravae se na odreenom nivou, tzv. prethodni nivo. Taj nivo moe biti relaksacija,
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
46/172
46
odnosno mirovanje miia, ili konstrukcija, statika ili dinamika, odreenog intenziteta.Svaka promjena predhodnog stanja miia registruje se od strane navedenih receptora ikoriguje na nivou kimene modine. U sluaju da doe do nagloga istezanja miia reagovaeneuromiino vreteno preko oba svoja receptora i to: dinamikim refleksom na istezanje preko anulospinalnog receptora i statikim refleksom na istezanje preko primarnoganulospinalnog i sekundarnog ili kitiastog zavretka.
3.3.5Mehanizam miine kontrakcije
Postoji vei broj teorija koje pokusavaju objasniti nain na koji se vri miina kontrakcija. Upravo ta inenjica govori da ni danas nije dovolno jasno na koji se nain kontrakcija vri.Ono to se sigurno zna jeste da je aktivni kontraktilni element miogfibrila i da u kontrakcijiaktivno uestvuju molekuli miozina i aktina. Kontrakcija pomou mehanizma klizanja za sadaima najvie dokaza. Po A.Guyton-u objanjava se molekularni mehanizam kontrakcije na
sl jedei nain: kontrakcija se izvodi u sarkomerama. U toku relaksacije sarkomere, njenaduina iznosi 1,6-2 m. Tako se aktinske niti, koje se nalaze sa obje strane Z-membraneuvlaci izmeu niti miozina, potpuno ih preklapaju,a djelimino se i meuso bno preklapaju.Meutim, vrhovi miozinskih niti udaljene su od Z-membrane i nedodiruju je. U tokukontrakcije,aktinske niti meusobno (ranije samo djelimino). Z-membrane se priblie takoda dodiruju vrhove miozinskih niti. Membrana moe biti toliko privuena da se vrhovimiozinskih niti kvre poviju.ta je uzrok da niti aktina kliznu meu niti miozina ni danasse nezna tano. Gotovo je sigurno da su te sile posljedica mehanikih, hemijskih ilielektrostatikih promjena koje nastaju na mjestima kontakata izmeu aktina i miozina tzv.mostovi.Svaka od navedenih sila moe djelovati pojedinano, a mogue je da djeluju ukombinaciji i istovremeno.
Mehanizam kontrakcije tee ovim redosljedom:
U mirovanju postoji konica koja onemoguava klizenje aktinskihniti.Tu konicu predstavljamanjak jona kalcijuma u miofibrilama.
Kontarakciju aktivira akcioni potencijal koji stie iz nervnog sistema. On putuje membranommiinog vlaknai preko retikula stie do miofibrila.
Akcioni potencijal aktivira jonsku pumpu ko ja oslobaa dovoljnu koliinu jona kalcijuma kojidifudiraju u miofibrile.
Joni kalcijuma pobude odreene sile koje privlae fidamente, odnosno dovode do klizanjaaktina izmeu niti miozina.
Potrebna enegrija za proces kontrakcije oslobaa se razlaganjem adenozim trifosfata (ATP) uadenozin difsfata (ADP).
Pobuivanje kontrakcije skeletnog miia zapoinje irenjem akcionog potencija u miinimvlaknima. Miina vlakna skeletnih miia dobijaju nadraaj iz CNS peko debelih
mijelizarnih nervnih vlakana. Ovavlakna uspostavljaju kontakt sa miinim vlaknom uneuromuskularnoj vezi preko nervnog zavretka tzv. nevrne ploice. U svakom miinom
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
47/172
47
vlaknu (izuzev u 2% sluajeva) postoji samo jedna ploica, jedna neuro muskularna veza kojase nalazi na sredinimiinog vlakna, tako da se nadraaj ravnomjerno iri prema krajevimamiinog vlakna. Ovakvo irenje omoguava da se skoro sve sarkomere istovremenokonrahuju. Nadraaj koji stigne u miinu eliju iri se povrinom membrane koja je tolikodebela da struja nemoe prodrijeti u unutranjost miine eli je ako bi podraila miofibrile.To se postie preko T-cjevcica sarkoplazmatinog retikula. Poto T-cjevice prolaze krozitavo tijelo miine elije od jedne do drugu strane to omoguava da retukul otpusti jonekalcijuma u neposrednoj blizini miofibrila. U skeletnoj muskulaturi svaka sarkomera sadridva sistema T-cjevica: krune i uzdune.
Splet ovih cjevcica,tzv. sarkoplazmatini retikul ima posebno svojstvo da sadri velikukoliinu jona kalcijuma. Nadraivanjem oblinje T-cjevice joni kalcijuma ulaze u citoplazmumiine elije i dovode do kontrakcije oblinje miofibile.
Motorna ploa ili neuromisicna veza predstavlja zavretak motoneurona, preko koje se nervninadraaj prenosi na mii.
Prijenos nadraa ja sa nervne ploe na miinu eliju vri se tako to se u citoplazmi nervne ploe stvara odreena koliina acetil-holina. Energiju za njegovu sintezu daju mitohonrije.Stvoreni acetin holin brzo u obliku mnogobrojnih sinaptikih mjehuria (oko 300 hilljada) prelazi u sinaptiki lje b gdje dolazi u kontakt sa povrinom membrane miine elije pobuujui njenu kontrakciju. Djelovanje acetin holina na miinu eliju traje vrlokratko,sveka 1 mili sekundu.U sinaptikom ljebu nalazi se enzim holinesteraza koji brzorazara acetin holin i neutralie njegovo dejstvo i tako stvara uslove za sl jedeu kontrakciju.
3.3.6 Testiranje miine snage Manuelno testiranje miine snage predstavlja metodu koja prua prilino tanu informaciju omiinoj snazi, odnosu stepenu njenog smanjenja usljed oboljenja, povrede ili inaktiviteta.Miina snaga se ocjenjuje ocjenamaod 0 do 5. Ocjena miine snage, do bijena manuelnimtestiranjem, predstavlja osnovu za planiranje terapeutskih vjebi u okviru kineziterapije. Nedostaci ove metodu su u tome , to je potrebno da pacijent aktivno uestvuje u testiranju, aocjena miine snage zavisi od subjektivne ocjene fizioterapeuta, koji vre testiranje. Na tajnain, pacijent i fizioterapeut mogu da utiu na ocjenu miine snage. Preporuuje se da
testiranje vri uvijek isti terapeut.
Ocjena 0 (0% miine snage)-potpuno odsustvo miine kontrakcije,
Ocjena 1 (10% miine snage) -postoji trag kontrakcije,
Ocjena 2 (25% miine snage)mii je u stanju da izvri pokret u punom obimuuz iskljuenje zemljine tee,
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
48/172
48
Ocjena 3 (50% miine snage)mii je u stanju da izvede pokret u punomobimu uz savlaivanje zemljine tee,
Ocjena 4(75% miine snage)- mii je u stanju da izvede pokret u punom ibimuuz savlaivanje izvesnog otpora,
Ocjena 5 (100% miine snge)- mii je u stanju da izvri pokret u punom obimuuz savlaivanje maksimalnog otpora.
Testiranje sposobnosti u obavljanjuaktivnosti dnevnoga ivota (AD) vri se i registruje na posebnim formularima, po odreenim grupama aktivnosti: a) U postelji b) Samozbrinjavanje (lina higijena, oblaenje, uzimanje hrane), c) Ustajanje, sjedanje, hodanjed) U invalidskim kolicima,e) Rukovanje raznim predmetimaf) Koritenje saobraajnih sredstava i dr.
Pri testiranju pojedinih AD koriste se kriterijumi:a) Nezavisan, b) Potrebna djelimina pomo,c) Potrebna puna pomo.
Na osnovu podataka dobijenih testiranjem odreuje se plan terapeutskih vjebi. Nastoji se dase ponovo uspostavi pokretljivost pojedinih segmenata lokomotornog aparata i time osoba ponovo osposobi za izvoenje pojedinih AD. Testiranje na kraju tremana slui procjeniuspjeha osposobljavanja i postignutog stepena samostalnosti.
3.3.7 Terapeutske vjebe
Terapeutske vjebe predstavljaju svrsishodne, sistematizovane pokrete koji treba da doprinesu
ouvanju, uspostavljanju ili zamjeni oteene pokretljivosti pojedinih djelova lokomotornogaparata.Inaktivitet iz bilo kog razloga, koji traje due vremena, praen je poremeajem u izvoenju lanca pokreta (diskenzija) usljed dobro poznatih razloga.Tako,prije svega, pokret se postepeno zaboravlja usljed inhibicije u CNS, u uslovima izostanka aferentnih proprioceptivnih impulsa. Neizvoenje pokreta, s druge strane praeno je nizom atrofikih idegenerativnih promjena u lokomotornom aparatu, usljed izostanka eferentnih impulsa.Restauracija pokretamogua je jedino kroz primjenu terapeutskih vjebi, koje su jedino ustanju da obezbi jede morotnu redukciju. Terapeutske vjebe su na taj nain u stanju da djelujuna pokretljivost i sposobnost kretanja:
a) Preventivno
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
49/172
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
50/172
50
Metabolizam-U uslovima inaktiviteta dolazi u poetku do smanjenja mezabolizma i porastatjelesne teine. Dui inaktivitet uslovljava negativan bilans, posebno azota, a takoer ikalcijuma, uz malapsorpciju masti. Nastupa mravljenje, a tkiva gube viskozoelastinu plastinost. U uslovima vrlo dugog opteg inaktiviteta, moe doi do inanicije i marazma.Poremeen je metabolizam vode i elektrolita, pri emu se izluuju velike koliine natrijuma ikalcijuma.
U urinarnom aparatu, usljed mobilizacije kalcijuma i njegovog izluivanja, esta je pojavakonkremenata sa klinikim manifestacijama koje prate konkrement u urinarnom aparatu, a prije svega infekcijom. Jednu od posljedica inaktiviteta, do koje dolazi u uslovimadugotrajnog leanja, predstavlja dekubitus, koji se javlja na koi iznad promirirajuih kotanihdjelova.
Inaktivnost i njegove posljedice
La motion c'es la vie (kretanje znai ivot), - ovaj aksiom od osnovnog biolokog znaaja, posebno se potvruje onda, kada iz bilo kog razloga, a prije svega usljed oteenja pojedinihelemenata neuromiino skeletnog aparata, nastupi inaktivitet. Inaktivitet predstavlja nefizioloko stanje. Moe biti uslovljen bilo restrikcijom pokreta u pojedinom zglobu, bilo prodoenim leanjem, bilo imobilizacijom,koja predstavlja ekstremnivid inaktiviteta. Nepovoljno djelovanje inaktiviteta je mnogostruko i ono se odraava prijesvega na neuromiinoskeletni aparat, kardiovaskularni, respiratorni aparat, kao i na
metabolizam.
Neuromiinoskeletni aparat - Usljed inaktiviteta i odsustva pokreta u pojedinimekstremitetima ili tijela u cijelini, izostaje aferentacija iz proprioreceptora,vestibularnog aparata i dr. Usljed toga dolazi do poremeaja centra za stato- ikinesteziju, ime je uslovljeno gaenje engrama, i dolazi do gubitka automatskih pokreta, a vremenom se remeti i koordinacija pri izvoenju pokreta.
5. SPECIFINOSTI DJELOVANJA MIIA U PRIRODNIM USLOVIMA
U okviru analize specifinosti djelovanja miia u prirodnim uslovima bie razmatranislijedei sluajevi:
Djelovanje miia na kotanoj poluzi,
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
51/172
51
Obrtni moment sile miia, Miini rad i spoljanje sile, Kinetiki lanci, Neke specifinosti rada viezglobnih miia.
5.1. Djelovanje miia na kotanoj poluzi
Miii u organizmu djeluju preko kotanih poluga.On jednim dijelom svojih vlakana proizvodi pritisak na zglob,a drugim dijelom proizvodi kretanje.
Zbog postojanja fiksne take u zglobu, dejstvo miia se razlae na komponente tako da jednakomponenta dejstvuje prema centru zgloba, i ona se zove radijalna komponenta (R). Drugakomponenta je upravna na radijalnu komponentu i zove se tangencijalna komponenta. Ovakomponenta dejstvuje u smislu kretanja (komponenta kretanja).
Veliina komponenti nije uvijek ista, iako je rezultanta uvijek ista veliina i ona zavisi odveliine rezultante i veliine napadnog ugla koji zatvara rezultanta miinog dejstva sa linijomkoja spaja centar pokretnog pripoja sa centrom obrtanja.
Kada se dvije kosti nau pod uglom od 180 mii nebi mogao proizvesti kretanje iako bi se protezao kroz sredinu kostiju.Miii su pripojeni na povrini kostiju, a pripoji su im nazglobnim ispupenjima to im daje mogunost da se iz tog ugla pokrene kost.
Primjer za ovaj sluaj je u zglobu lakta, gdje su uslovi za pokret najnepovoljniji, jer jeradijalna komponenta najvea, a tangencijalna komponenta koja izaziva kretanje najmanja.
Ako bi vrijednost ugla bila nula (0), tada bi radijalna komponenta bila maksimalna, atangencijalna kom ponenta bi bila nula (0). Tada miina sila nebi mogla izvriti pokret.
Poveanjem napadnog ugla poveava se tangencijalna komponenta (T), a smanjuje radijalnakomponenta (R). Kada napadni ugao dostigne vrijednost od 90 tada je tangencijalnakomponenta (T) maksimalna, a radijalna komponenta (R) dostie svoju najmanju vrijednost tj.nula (0).
Kada je napadni ugao vei od 90 tangencijalna komponenta (T) se smanjuje, a pojavljuje se
komponenta pritiska, ali sada u suprotnom smjeru, pa se zato naziva komponenta razvlaenja.Ovaj fenomen u radu miia na polugama, koristi se u sportu (hrvanju, karateu, dudou i sl.).
5.2 Obrtni moment sile miia
Kada moemo govoriti o obrtnom momentu?
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
52/172
52
Kada sile djeluju na odreenom rastojanju od fiksne take radi se o obrtnom momentu, tj. ovektoru koji je jednak proizvodu sile i kraka sile.
Intenzitet sile se u obrtnom momentu sile miia odreuje veliinom povrine fiziolokog presjeka djelujuih miinih vlakana, a krak sile je predstavljen najkraim rastojanjem odcentra zgloba preko kojeg sila miia djeluje, do napadne sile miia.
Obrtni moment sile miia ni u jednom trenutku ne moe biti jednak nuli, i on je uvijek realnaveliina, ali ne predstavlja uvijek istu veliinu.
Fizika veliina koja uzrokuje rotaciju idefinie se kao proizvod sile (F), kraka sile (r) isinusa ugla izmeu pravca djelovanja sile i pravca vektora koji odreuje udaljenost hvatitasile od ose obrtanja.
M = F x r x sin
Jedinica za moment je Njutnmetar (Nm).
Moment se dobija mnoenjem dva vektora koji daju novi vektor odreen sa:
intenzitetom, pravcem i smjerom.
Intenzitet je jednak intenzitetu zadanih vektora i sinusa ugla izmeu njih.
Pravac je okomit na ravninu zadanih vektora. Smjer je odreen pravilom desna ruke, pri emudesnu aku postavljamo tako da su prsti postavljeni u smjeru vektora sile, a palac odreuje pravac vektora momenta.
Najbolji poloaj jednog miia za maksimalno ispoljavanje je kada je ugao = 90.Obrtnimoment je najvei kada je ugao = 90, jer je i krak sile maksimalan.
Najvea vrijednost kraka sile miia jednaka je rastojanju od centra zgloba do centra pokretnog pripoja miia.
Za ramenini mii je izmjereno da je krak sile najvei onda kada uzdune ose nadlakta i podlakta zatvaraju ugao oko 100.Utom poloaju je ugao izmeu radijalne komponentemiinog dejstva i linije koja spaja centar zgloba lakta i centar perifernog pripoja ramenog
miia tipian pregiba u zglobu lakta, jednak pravom uglu. Ako je obrtni moment sile miia (M xf) jednak proizvodu tangencijalne komponente silemiia i rastojanja od centra zgloba do centra pokretnog pripoja
(T x r), gdje se po slinosti trouglova moe zakljuiti da je:
M x f = Tx r ;
f = r x sin ,
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
53/172
53
T = Mx sin ,
M x r x sin = M x sin x r,
M x f = T x r
5.3. Miini rad i sila tee
Sila tee je najvanija spoljna sila u odnosu na rad miia u prirodnim uslovima. Ona je jednaka teini onog dijela tijela koji se kree oko fiksne take.
Miino naprezanje potrebno da pokrene teinu poluge nee biti isto, to zavisi od kraka siletee.
1. Primjer kod aparata za kretanje ovjeka je podizanje ruke iz priruenja do
odruenja,
Slika 24
Najvee miino naprezanje je u poloaju odruenja jer je krak sile maksimalan.
Najmanje miino naprezanje je u poloaju priruenja, jer je krak sile = 0.
Podizanjem ruke iznad horizontale smanjuje se krak sile i miino naprezanje.
3. Primjer kod aparata za kretanje ovjeka je p odizanje nogu u vis,
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
54/172
54
Slika 25
Podizanjem nogu poveava se krak sile tee,a time i miino naprezanje.Ono bi trebalo bitinajvee u poloaju prednosa, a daljim podizanjem nogu da se smanjuje.Meutim, miinonaprezanje je najvee u poloaju uznosa, jer je pasivno statiko naprezanje antagonista utom poloaju nogu najvee (vee od same teine nogu, pa je i ovaj poloaj najtei. Savijanjemnogu u koljenima u velikoj mjeri se smanjuje pasivno zatezanje miia antagonista te je lakedovesti butine u visoki poloaj.
5.4 Teina tijela
Teina tijela je sila kojom masa tijelazbog gravitacionog ubrzanja zemlje pritie podlogu.Poto je masa skalarna veliina,a ubrzanje vektorska veliina, teina tijela predstavlja proizvod vektora i skalara.
G = mxg ; gdje je G - teina tijela u njutnima,
m - masa tijela u kilogramima,
g - ubrzanje zemljine tee 9,81 m/s2;
Na primjer: Ako osoba ima masu od 70 kg, njegova teina e iznositi 686,7 N.
Na Mjesecu e njegova teina iznositi oko 6 puta manje i bie 119,0 N.
5.5 Sila reakcije oslonca i sila trenja
Sila trenja se esto javlja u praksi, a njen krak djelovanjem moe da bude dui ili krai, zbogega i miino naprezanje moe da bude vee ili manje. Krak sile trenja se rauna kaoudaljenost teita tereta od take obrtanja poluge (zglba) koja vri taj rad. Kao primjer moese navesti potiskivanje tereta po ravnoj povrini.
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
55/172
55
Potiskivanje tereta moe da se vri opruenom rukom, savijenom rukom u laktu i potpunoopruenom rukom tako da su rame, opruena ruka, aka i teite tereta u istoj ravni.
U prvom sluaju miino naprezanje je najvee jer je krak sile najdui.
Slika 26
U drugom sluaju krak sile je manji te e se istim miinim naprezanjem teret lake pomjeriti.
Slika 27
U treem sluaju krak sile trenja ravan je 0, te e efekat rada biti najvei uz minimalni utroakenergije.
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
56/172
56
Slika 28
5.6 Sile otpora
Kretanjem u mediju (voda, zrak) javljaju se reaktivne sile otpora. One su kao i sile trenjausmjerene supr otno od kretanja, a njihova veliina zavisi o brzini kretanja, oblikumaterijalnog tijela igustoi medija. Smanjivanjem bilo kojeg od tih inioca, smanjit e se iotpor. Kod skakanja padobranom ili slobodnim stilom postie se odreena brzina nakon kojesli jedi jednoliko kretanje. Brzina e se prestati poveavati u trenutku kada aktivna sila, tj.teina skakaa postane jednaka reaktivnoj sili otpora. Veliina sile otpora uz istu teinusportaa smanjuje se zauzimanjem aerodinaminijeg oblika tijela.
5.7 Sile inercije
Svojstvo koje posjedujusva materijalna tijela naziva seinercija,a manifestira se opiranjem promjeni kretanja. Prisjetimo li se prvog Njutnovog zakona i definicije dinamike, uoit emoda se to svojstvo manifestira u pravolinijskom kretanju kada se ono mijenja po brzini,odnosno u krivolinijskom kada se mijenja po pravcu. Inercija se manifestira i djeluje kao isvaka druga sila, takoer je reaktivna, a kao i druge reaktivne sile usmjerena je suprotnoaktivnoj sili.
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
57/172
57
5. SLOENI POKRETI IKINETIKI LANCI
Jedan od osnovnih problema biomehanike je sloenost strukture i funkcije ovjekovog tijela.Kompleksnost strukture lokomotornog aparata ovjeka je posljedica ogromnog broja pokretnih i polupokretnih zglobova koji imaju od jedne do tri ose rotacije, ili u njima kotane povrine klize jedna po drugoj.
Slika 29
Sa biomehanikog aspekta posmatrano, tijelo je najveim dijelom sastavljeno od niza manjeili vie kutnih dijelova poluga, meusobno spojenih zglobovima. Meutim, uobiajenakretanja ovjeka se baziraju na sloenim pokretima, odnosno, na simultanom i sukcesivnomizvoenju velikog broja sloenih pokreta. Zbog mehanike povezanosti susjednih dijelovalokomotornog aparata, svaki osnovni pokret nuno utie na udaljene dijelove tijela i osnovne pokrete koji se u njima vre. Taj uticaj je mehanike prirode i manifestuje se silama koje se prenose najprije na susjedne, a zatim na sve dalje i dalje dijelove lokomotornog aparata.Ovakavkompleks pokreta, koje izaziva jedan mii neposrednou predjelu svoje lokacijei posredno na susjedne dijelove tijela naziva se lanac pokreta ili kinetiki lanac. Zavisnood toga, da li postoji vrsta taka na krajevima takvih lanaca razlikuju seotvorenii zatvoreni
8/10/2019 Doc.dr Osmo Bajri - Biomehanika Sa Kineziologijom Skripta
58/172
58
kinetiki lanci.To je kompleks pokretakoji izaziva jedan mii neposredno u predjelu svojelokacije i posredno na susjedne dijelove tijela.
Mogu biti:
Otvoreni kinetiki lanci i Zatvoreni kinetiki lanci
5.1. Otvoreni kinetiki lanci se javlja u sluaju kada se radi o sistemu dijelova tijela koji jeuvren samo na jednom svom kraju.Drugi kraj je slobodan i cilj je da se taj otvoreni krajkinetikog lanca pokrene na odreeni nain.
Najprostiji primjer dejstva u otvorenom kinetikom lancu je dejstvo miia pregibaa u zglobu lakta, gdje je

![Biomehanika SOpdfkmtm.fs.uni-lj.si/slo/izobrazevanje/fpp-objave/Biomehani... · 2012. 2. 1. · Title: Biomehanika_SOpdf [Compatibility Mode] Keywords ()](https://img.dokumen.tips/doc/110x75/60b500f59c6d0d03eb2f50b5/biomehanika-2012-2-1-title-biomehanikasopdf-compatibility-mode-keywords.jpg)

![Biomehanika normalnog hoda Zadar2009 [Read-Only] · 2009. 6. 9. · 9.6.2009 1 BIOMEHANIKA NORMALNOG HODA BIOMECHANICS OF NORMAL GAIT Mario Kasović 1, Iva Mrñen 2 i Mladen Mejovšek](https://img.dokumen.tips/doc/110x75/60b4fcc94ea3c74cc81ca4d2/biomehanika-normalnog-hoda-zadar2009-read-only-2009-6-9-962009-1-biomehanika.jpg)