Embed Size (px)
Citation preview

at SciVerse ScienceDirect
Estuarine, Coastal and Shelf Science 117 (2013) 94e106
Contents lists available
Estuarine, Coastal and Shelf Science
journal homepage: www.elsevier .com/locate/ecss
Do marine substrates ‘look’ and ‘sound’ the same? Supervised classification ofmultibeam acoustic data using autonomous underwater vehicle images
Vanessa Lucieer a,*, Nicole A. Hill a, Neville S. Barrett a, Scott Nichol b
a Institute for Marine and Antarctic Studies, University of Tasmania, Private Bag 49, Hobart, Tasmania 7001, Australia1bMarine and Coastal Group, Geoscience Australia, GPO Box 378, Canberra, ACT 2601, Australia
a r t i c l e i n f o
Article history:Received 16 July 2012Accepted 2 November 2012Available online 15 November 2012
Keywords:multibeam acoustic dataautonomous underwater vehiclessubstrate predictionimage classification
* Corresponding author.E-mail address: [email protected] (V. Lu
1 Tel.: þ61 3 62277219.
0272-7714/$ e see front matter Crown Copyright � 2http://dx.doi.org/10.1016/j.ecss.2012.11.001
a b s t r a c t
In this study we outline the techniques used to transformmultibeam acoustic data into spatial layers thatcan be used for predictive habitat modelling. The results allow us to identify multibeam attributes whichmay act as potential surrogates for environmental variables that influence biodiversity and define whichvariables may be reliable for predicting the distribution of species in temperate waters. We explorea method for analysing the spatially coincident multibeam bathymetric and backscatter data fromshallow coastal waters to generate spatial data products that relate to the classes derived from fine-scalevisual imagery obtained using an autonomous underwater vehicle (AUV). Classifications of the multi-beam data are performed for substrate, rugosity and sponge cover. Overall classification accuracies forthe classes associated with substratum, rugosity and sponge structure were acceptable for biodiversityassessment applications. Accuracies were highest for rugosity classes at 65%, followed by substratumclasses at 64% and then sponge structure classes at 57%. Random forest classifiers at a segmentation scaleof 30 performed best in classifying substratum and rugosity, while K-nearest neighbour classifiers per-formed best for sponge structure classes, with no difference in accuracy between scale 30 and 60.Incorporating backscatter variables using segmentation improved the overall accuracy achieved by thebest performing model by between 1% (rugosity) and 9% (substratum) above using topographic variablesonly in the grid-based analyses. Results suggest that image-based backscatter classification showconsiderable promise for the interpretation of multibeam sonar data for the production of substratemaps. A particular outcome of this research is to provide appropriate and sufficiently fine-scale physicalcovariates from the multibeam acoustic data to adequately inform models predicting the distribution ofbiodiversity on benthic reef habitats.
Crown Copyright � 2012 Published by Elsevier Ltd. All rights reserved.
1. Introduction
Benthic habitat mapping provides the baseline data required forthe assessment of ecological processes in the marine environment.Physical characteristics of the seabed, such as topographiccomplexity, have an important influence on the distribution,diversity and structure of biological assemblages (Kostylev et al.,2001; Ierodianconou et al., 2011) and are valuable in describingpatterns of biodiversity (Hosack et al., 2006). Benthic habitats areincreasingly being seen as surrogates for biodiversity, especially inthe context of Marine Protected Area (MPA) planning (Ward et al.,1999) and for the assessment of ecosystem function (Eyre and
cieer).
012 Published by Elsevier Ltd. All
Maher, 2011) promoting habitat maps as essential planning tool.The recent utilisation of acoustic multibeam echosounders (MBES)coupled with high resolution video for ground truthing has led toa significant improvement in the scale to which seafloor habitatscan be identified and in describing their relationships with asso-ciated biota (Kostylev et al., 2001; Stevens and Connolly, 2004,2005; McGonigle et al., 2009). To date, studies aiming to developpredictive capacities frommultibeam data at the habitat level, haveeither focused on deeper water surveys (>1000s m; (Kloser et al.,2010)) or, particularly in shallow coastal waters, have only exam-ined single habitats types such as seagrass (De Falco et al., 2010;Brown et al., 2011a,b). Very few studies have focused upon thetranslation of multibeam acoustic data into multiple spatial dataproducts that can be used for spatial predictions in patterns ofbiodiversity. In this research we explore a method for analysing thespatially coincident multibeam bathymetric and backscatter datafrom shallow coastal waters (<100 m depth) to generate spatial
rights reserved.

V. Lucieer et al. / Estuarine, Coastal and Shelf Science 117 (2013) 94e106 95
data products that relate to the classification categories derivedfrom fine-scale visual imagery obtained using an autonomousunderwater vehicle.
Given the recent technological developments in MBES and theiremployment to fine scale seabed mapping programs worldwide,there is a need to develop automated methods that can transformlarge areas of spatially complex and highly dimensional bathy-metric and backscatter data into simpler, separate data layers thatcan in some way be used to characterise the seafloor (Marsh andBrown, 2009). Bathymetric data and its derivatives that describeseabed morphology, have been well utilised in this respect andhave been the topic of much discussion in the literature (Hughes-Clarke, 1998; Livingstone et al., 1999; Bell and Barnes, 2000;Wilson et al., 2007; Gagnon et al., 2008; Marsh and Brown, 2009;Woodby et al., 2009; Ahsan et al., 2010; Brooke et al., 2010). Thecapacity of backscatter data however, is still under development asthe textural information that it contains is potentially useful forseafloor characterisation. This value has been identified throughrecent developments in multibeam echosounder backscatter pro-cessing tool which are now included in most commercially avail-able processing software. These tools allow end users to produceproperly corrected backscatter mosaics and add more robustqualitative and quantitative discrimination of seabed materials totheir seafloor characterizations (Fonseca et al., 2009). Fully cor-rected backscatter data increases confidence in interpretations ofseabed features, and it offers an improved baseline dataset forimplementing automated mapping techniques, which can poten-tially produce more detailed maps in less time. The correctedbackscatter data is also more appropriate for integration withsediment samples and subsequent quantitative analysis. Methodsdeveloped in the field/s of landscape analysis and pattern recog-nition (Lucieer et al., 2005; Trias-Sanz et al., 2008) that usesegmentation algorithms (such as object based image analysis(OBIA)) provide one potential solution to the problem of quanti-tative analysis of multibeam backscatter, although their applicationto seabed mapping is just emerging (Lucieer and Lamarche, 2011).
In this paper we use OBIA techniques to develop reproducibleclassification methods to facilitate the analysis of MBES backscatterdata collected over large areas. OBIA segments the backscatterimage into image objects (image segments) that contain multiplepixels that represent semantically significant regions (Trias-Sanzet al., 2008; Kim et al., 2011). The strength of OBIA analysis is thatit examines pixels in context of the environment that they occur inrather than in isolation. OBIA builds up a picture iteratively,recognizing groups of pixels as objects and uses the colour, shape,texture and size of objects as well as their context (such as locationrelative to the depth grid) and relationships to other objects to drawconclusions and inferences regarding classification rules. OBIAgenerates classified polygons with numerical attributes thatdescribe the texture of the segment such as mean homogeneitywhich illustrates how smooth or rough the texture is. These poly-gons can then be included within the spatial analysis as individualvariables with different attributes to characterize seabed habitats.
The fine-scale delineation of substrate is where the focus ofcurrent benthic habitat biodiversity mapping studies is now tar-geted. It is also of particular significance to benthic biodiversitystudies where biota is in close association with the seafloor andsubtle changes in substrate can affect the structure and composi-tion of communities.
Identifying environmental parameters from hydroacoustic sour-ces that influencebenthic community structure (Post, 2006) andhelpto examine surrogate relationships that predict patterns in biologicaldistributions (beyond the range of individual sampling) has devel-oped a need for this research. To examine these relationships, bio-logical and physical data needs to be collected at an appropriate and
matching scale. Until recently, very little quantitative biologicalinformation, other than those collected by spatially coarse methodssuch as trawls, has existed about the benthic fauna on deep reef(>40mdepth) andtheir adjacent shelf sedimenthabitats inTasmania(Barrett and Edgar, 2010). This is despite these areas often being corehabitats for important fishery species such as reef associated rocklobsters, striped trumpeter and banded morwong or for sedimentassociated species such as scallops and flathead.
The Integrated Marine Observing System (IMOS) AutonomousUnderwater Vehicle (AUV) has provided the opportunity to collectbiological data that can be appropriately matched to the scale ofmultibeam acoustic data. To examine the relationship between thephysical structure of the seabed and the associated biological assem-blages, a range of physical characteristics of the seabed were derivedfrom themultibeam bathymetry and backscatter for testing of corre-lations with the AUV derived imagery. Adopting the marine habitatclassificationsystemandterminologyof theSeamapTasmaniaproject(Jordan et al., 2005) we examine the classification and prediction ofmarine substrate fromfine scale (2m) acousticmultibeam imageryof117 km2 area on the south east coast of Tasmania Australia.
The main focus of this research is to examine and compare theway that we ‘visually’ classify the seafloor to what can ‘acoustically’be separated using different textural and topographical attributes.Here, we investigate the development of three classificationmethods: 1) to quantitatively extract structure and compositionmetrics about the seafloor from both the bathymetric and back-scatter multibeam products; 2) to assess if these metrics relate tothe ‘visual’ category used to classify the imagery from the AUV; 3)to see if these metrics can be used to predict substrate, spongedistribution, and rugosity over the entire study site where directobservations by the AUV have not been made and; 4) we test theprediction accuracy of three different classification models;random forests, classification trees and K-nearest neighbour. Theseresults will help to improve the quantitative modelling of biodi-versity assessment and demonstrate the value of multibeamacoustics coupled with fine scale video transects for this purpose.
2. Survey area
The Tasman Peninsula in southeast Tasmania, Australia (Fig.1),was chosen because of its diversity of reef forms and biota. Itincorporates a series of highly fractured reefs located directlyoffshore of headlands and coastal bluffs, and isolated reefs locatedon the mid continental shelf. A total of 116 km2 was surveyed in2008/2009 (Fig. 1). The inshore reefs range in area from 0.15 to2.7 km2 and are located in water depths of 10e70 m, extendingup to 3 km seaward. These reefs are very irregular, with localisedpeaks up to 20 m high, likely formed in dolerite. The HippolyteRocks reef covers 2.13 km2 and rises from 90 m water depth at itsbase to w6 m at its shallowest point (Nichol et al., 2009). Adistinctive feature of this reef is a series of three peaks with near-vertical sides that are 20e30 m high. In contrast, the shorelinereefs (closer to the coast) are typically low profile. Some havea stepped profile and likely consist of multiple types of sedimentaryrock resulting in complex topography ranging from extensive flatareas to highly complex boulder fields. This makes the area anexcellent site to test out ability to examine surrogates across thebroad spectrum of physical conditions.
3. Methods
3.1. AUV image collection and analysis
Observations of the benthic substrate were made using theAUV Sirius. This AUV is part of the IMOS AUV facility operated by

Fig. 1. A) Location map of the Tasman Peninsula study area on the south east coast of Tasmania, Australia. B) Extent of multibeam data collected between High Yellow Bluff and theHippolyte Rocks. Black dots indicate AUV transects. Acoustic data shows relative backscatter intensity (dB). C) Zoomed in section of O’Hara Bluff showing configuration of the AUVsampling design over the reef area (from w20 m to w60 m water depth).
V. Lucieer et al. / Estuarine, Coastal and Shelf Science 117 (2013) 94e10696
The Australian Centre for Field Robotics (ACFR) at The University ofSydney (see http://imos.org.au/auv.html). Two surveys werecompleted during October 2008 and May 2009 comprising eleventransects in total nested within the available multibeam coverage.Each transect was an elongated grid beginning at approximately20 m water depth and extending down the depth contour to justbeyond the reef edge at 90 m. An intersecting grid design allowedfor multiple image crossovers, necessary for post processing ofimagery to enhance geo-referencing (Barkby et al., 2009) andprovided appropriate spatial replication to characterize the vari-ability within and between depth zones and locations.
During each mission, the AUV navigated at a height of 2e3 mabove the seafloor along a 1e10 km pre-programmed grid pathwith a field of view of 1.5 � 1.3 m. High-resolution photographicimages were collected every second using a stereo camera systemwith approximately >40% overlap. By coupling the image derivedgeo-referencing with AUV vehicle tracking via an Ultra-short BaseLine (USBL) positioning system, all images were able to be preciselygeo-referenced to sub 2 m accuracy i.e. sub MBES pixel. Five AUVmissions were undertaken on the coastal reefs along the Fortescuecoast (High Yellow Bluff, Deep Glen Bluff, Blowhole, Waterfall Bluffand O’Hara Bluff) spanning water depths of approximately 18e60 m and extending from the coastal reef out over the adjacentshelf sediments. Six missions were undertaken around the
Hippolyte Rocks, with one mission over Deep Reef, an isolated reeflocated 3 km north of the Hippolyte Rocks in 80 m water depth(Fig. 1).
Images were scored at a rate of every 100th image along thetransect path (a spacing of approximately 40 m). Images were firstscored for their dominant substrate in one of ten classes: mud,sand, coarse sand, gravel, cobble, boulders, rock, patchy reef/sand,sediment veneer or screw shell. The seabed was also subjectivelyclassifiedwith a degree of rugosity (from the AUV frame)e flat, low,moderate and high e as was the structure provided by sponges(none, low, moderate, high). The biota occurring underneath 50random points in each image was then scored. Data obtained from1250 individual images were co-located with multibeam attributesfor the training set for the classificationmodels. Table 1 provides anoverview of each of the substrate, rugosity and sponge classes usedin the analysis.
3.2. Multibeam data collection and image attribute generation
Geoscience Australia’s Kongsberg EM3002 (D) 300 kHz multi-beam sonar was employed to map sections of the continental shelfalong the coast of the Tasman Peninsula in February and March2009.

Table 1The AUV visual classification table for 1) substrate 2) rugosity and 3) sponge.
Class Substrate Description Number ofsamples
1s Mud Mud 02s Sand Sand 73s Coarse Sand Including visible shell
bits (sand 2e4 mm)417
4s Cobble Rocks with diameter>64 mm and <256mm (estimated)
1
5s Rock Contiguous reef 2446s Boulders Rocks with diameter
>256 mm (estimated)44
7s Patchy Reef/Sand Reef interspersed withsand patches
350
8s Screw Shells Screw shells e onlyuse if 100% cover
0
9s Sediment veneer onhard substrate
Appears to be sedimentbut has underlying hard-substrate structure and/orreef associated organisms
187
10s Gravel Loose rock with diameter>2 mm and <64 mm
0
Class Rugosity Description1r Flat Flat 7512r Low Rugosity Undulations to 0.5 m visible
within frame, few obviouscrevices
325
3r Moderate Rugosity Relief to 1 m with or withoutobvious crevice structure, orlower relief, but with clearcrevice structure (such as aboulder-field)
108
4r High Rugosity Relief in excess of 1 m 66
Class Sponge class Description1p No sponges No sponges 2992p Low profile Generally low profile, sponges
<10 cm367
3p Moderate profile Medium canopy structure,sponges b/w 10e20 cm
452
4p High profile High canopy contribution,sponges >20 cm
132
V. Lucieer et al. / Estuarine, Coastal and Shelf Science 117 (2013) 94e106 97
3.2.1. Multibeam backscatter processingThe Tasman Peninsula backscatter data were processed to
attenuate effects caused by recording equipment, seabed topog-raphy and water column acoustics. The methods for generating thebackscatter images are as per Geoscience Australia methodologyoutlined in the field cruise report (Nichol et al., 2009). The Kongs-berg EM3002 multibeam backscatter data were processed usingCMST-GA MB Process v8.11.02.1, a multibeam backscatter process-ing toolbox co-developed by Geoscience Australia and Centre forMarine Science and Technology (CMST), Curtin University ofTechnology (Heap et al., 2009). The fully processed backscattercoefficients were corrected for transmission loss and insonificationareas based on the equation given in Talukdar et al. (1995). Theincidence angle and coordinates on the seafloor, XeY and depth (Z)were then calculated. The full process within the toolbox involvedthe following steps: a) conversion from the Kongsberg raw (*.all)data format into Matlab data format; b) calculation of the absoluteX, Y, Z position and the incidence angle q for each beam and eachping; c) removal of the system transmission loss; d) removal of thesystemmodel; e) calculation of the surface backscattering strength,which involves correction for transmission loss and area; and f)removal of the angular dependence.
A technique for removing the angular dependence developed bythe CMST was applied to the data (Gavrilov et al., 2005). Removingthe local mean angular trend also filters out large-scale variations
due to change, either sharp or gradual, in the seabed propertiesalong the swath line. To recover this useful information and obtainabsolute values of backscatter strength, the angularly equalisedbackscatter strength within the sampling window is increased byadding the window-mean backscatter level at a specified referenceangle (in this case a moderate angle of 25� was used). The back-scatter data were exported as a 2 m raster.
3.2.2. Attributes derived from bathymetric dataThe multibeam bathymetric data were resolved to 2 m and
output as a XYZ grid from Caris (Geospatial Software Solutionswww.caris.com) and converted to an ArcGIS grid. From the bathy-metric layer twelve variables that characterise seafloor topographywere generated using ArcGIS 9.2 and ArcView 3.20 extension Jen-ness Grid Extension Each of the bathymetric derivatives are listed inTable 2 with a description of the variable and the software used togenerate it.. Due to the difficulty in analysing circular data such asaspect (i.e. the difference between 360 and 1� is the same asbetween 1 and 2�) aspect is represented by “northness” and“eastness” and which represents deviation from 0� to 90�
respectively.
3.2.3. Attributes developed using object-based image analysisMultibeam backscatter data lends itself to image textural anal-
ysis through object based image analysis (OBIA). Image texture isquantified by the spatial variation of grey level values. A commonapproach uses the seminal work of Haralick et al. (1973) wheretexture measures are derived by comparing the values withina window (usually eight nearest neighbours). Different matricescan be calculated for different angles (0�, 45�, 90�, and 135�) anddistances between the horizontal neighbouring pixels. Manystudies in land cover and forest type classification utilize texturalfeatures to improve the classification accuracies (Kim et al., 2011).Here we utilize six particular variables to explore the relationshipbetween the backscatter and the seafloor class (Lucieer andLamarche, 2011). The descriptions for each variable are outlinedin Table 3.
3.2.3.1. Segmentation of the MBES imagery. Object-based imageanalysis is an image processing technique that classifies objects inan image based on a segmentation phase followed by an object-based classification phase (Benz et al., 2004). A segmentationalgorithm was used to subdivide the combined multibeam back-scatter and bathymetric image (as a 2 band raster) into smallerimage objects based on an optimisation procedure, which locallyminimises the average heterogeneity of image objects for a givenresolution across the image. Local variation in backscatter can beaddressed by grouping spatially contiguous pixels with a segmen-tation criterion. Classification can then be performed on thesegments, instead of the traditional individual pixels. This is a verydifferent approach than examining themean of the homogeneity ofthe backscatter in a buffered region of habitat of interest (De Falcoet al., 2010). Image segmentation was completed using DefiniensDeveloper� (version 8.0) software (http://earth.definiens.com/). Amulti-resolution segmentation algorithmwas chosen for this study,which is a bottom up, region-growing technique starting with onepixel objects. Both the multibeam backscatter and bathymetricimage layers were weighted equally in the segmentation analysis,rather than analysing the backscatter layer in isolation. Texturesthat appear similar at different depths can be separated this way.
In this analysis the multibeam image was segmented at scales30 and 60, where the “scale parameter” determines the maximumallowed heterogeneity for the resulting image objects (Benz et al.,2004); higher values for result in larger image objects, smallervalues in smaller ones. The multiresolution segmentation was

Table 2Bathymetric variable output descriptions.
Derivative Variable description (3 � 3 pixel analysisextent unless specified below)
Software
Bathymetry Depth (negative elevation) of the grid cell.Bathymetric product generatedfrom ascii output file into grid with 2 m resolution
Spatial Analyst-ArcGIS 9.3
Slope Slope denotes the maximum change in depthbetween each cell and thecells in an analysis neighbourhood. Calculated indegrees from horizontal
Spatial Analyst-ArcGIS 9.3
Curvature Seabed curvature defined as the derivative of therate of change of theseabed. It is a quantifiable measure of the shapeof the seabed surface.
Spatial Analyst-ArcGIS 9.3
Profile curvature Profile curvature is a measure of the seabed inthe direction of the slopeof the seabed
Spatial Analyst-ArcGIS 9.3
Planiform curvature Planar curvature is a measure of the seabedperpendicular to the slopedirection of the seabed
Spatial Analyst-ArcGIS 9.3
Eastness (aspect) Eastness is a value that reflects how much theaspect value deviates from 90� .Aspect is an intuitively valuable habitat variableand may provide informationregarding the “exposure” of position of the seabedto the prevailing swellconditions or the extent to which sunlight is able toreach the seabed.
Jenness Grid Tools e ArcViewExtension
Northness (aspect) Northness is a value that reflects how much the aspectvalue deviates from 0� .
Jenness Grid Tools e ArcViewExtension
Northing (geographicposition)
Northing coordinates plotted onto a 2 m grid ArcGIS 9.3
Easting(geographicposition)
Easting coordinates values plotted onto a 2 m grid ArcGIS 9.3
Finescale BathymetricPosition Index(2 cells)
This is a measure of a location relative to the overalllandscape. It is calculated by comparing the elevationof a cell with the mean elevation of surrounding cells byan analysis extent of 2. Locations that are higher thantheir surroundings will have positive value, whilstareas that are lower will have negative values. Flatareas have values closer to zero (Weiss, 2001)
Benthic Terrain Modeller Toolfor ArcGIS
Broadscale BathymetricPosition Index(10 cells)
This is a measure of a location relative to the overalllandscape. It is calculated by comparing the elevationof a cell with the mean elevation of surrounding cellsby an analysis extent of 10. Locations that are higherthan their surroundings will have positive value, whilstareas that are lower will have negative values. Flatareas have values closer to zero (Weiss, 2001).
Benthic Terrain Modeller Toolfor ArcGIS
Terrain rugosity index The rugosity measure is a ratio of the surface area tothe planar area across the neighbourhood of the centralpixel in a 3 � 3 neighbourhood (Jenness, 2002). By thismethod flat areas will have a rugosity value near to 1,whilst high relief areas will exhibit higher values ofrugosity. This analysis is limited to a single scale andwhether or not it captures rugosity at a level relevantto observed habitat is therefore sensitive to the initialraster resolution.
Jenness Grid Tools e ArcViewExtension
V. Lucieer et al. / Estuarine, Coastal and Shelf Science 117 (2013) 94e10698
examined for two levels, 30 and 60 to see if the segment size hadany influence on the classification accuracy. The scale parameterutilises homogeneity measures based on shape (compactness) andcolour (spectral signal) (Benz et al., 2004) and for this analysis wereset at Shape 0.1 and Compactness 0.5. The shape criterion isespecially helpful in avoiding highly fractured image objectresulting from strongly textured data (for example; backscatterdata).
Each image object contains multiple pixels and can be charac-terised by hundreds of object features based on descriptive statis-tics of pixel values, object shape, object texture, etc. The challengein object-based image analysis is to identify the most suitableobject features for subsequent classification. The Haralick grey levelco-occurrence matrix (GLCM) is a widely used texture model,
which is based on a tabulation of the frequency of the neighbour-hood combinations of pixel grey levels within an object (Benz et al.,2004). From this matrix several texture measures, such as GCLMcontrast, GLCM homogeneity, GLCM standard deviation and GLCMmean, were derived expressing the statistical structure of the imageobjects. GLCM contrast (also called the ‘sum of squares variance) isthe opposite of homogeneity; it is a measure of the amount of localvariation in an image and increases exponentially as the contrast onthe diagonal increases in the matrix.
Homogeneity is the most commonly used measure of texture. Ifthe image is locally homogeneous, the value is high if GLCMconcentrates along the diagonal. Directional invariance of theGLCM can be calculated in all four directions (0�, 45�, 90� and 135�).An angle of 0� represents the vertical direction, an angle of 90� the

Table 3Backscatter variable output descriptions.
Standard deviation ofbackscatter
Backscatter intensity is important in quantifying physical propertiesof the seafloor (Le Gonidec et al., 2003) and provides a proxy forseafloor hardness and softness. This method takes the Std-Dev ofthe backscatter values (in dB) within the segment.
Definiens 8_Ecognition
Mean backscatter This method takes the mean of the backscatter values (in dB)within the segment.
Definiens 8_Ecognition
GLCM homogeneity The GLCM homogeneity criterion weights the values of a segmentby the inverse of the contrast with weights decreasing exponentiallyto the distance across the diagonal.
Definiens 8_Ecognition
GLCM contrast GLCM contrast is the opposite of homogeneity. It is the measure oflocal variation of GLCM within the image segment.
Definiens 8_Ecognition
GLCM standard deviation GLCM standard deviation deals specifically with the standard deviationof the GLCM, with the combination of reference and neighbour pixelswithin the segment. It is a measure of the dispersion of values aroundthe mean.
Definiens 8_Ecognition
GLCM mean GLCM mean is the average expressed in terms of the GLCM. The pixelvalue is not weighted by its frequency occurrence itself, but by thefrequency of its occurrence within the segment neighbourhood pixels.
Definiens 8_Ecognition
V. Lucieer et al. / Estuarine, Coastal and Shelf Science 117 (2013) 94e106 99
horizontal direction, etc. In this study, GLCM contrast, homoge-neity, standard deviation and mean measures were calculated forall image objects based on the bathymetric and backscatter imagebased on all directions.
The segmentation results were export from Definiens withcolumns displaying the mean of the topographic and texturalinformation calculated for each of the segments. The AUV pointswere plotted over the segmentation layer and the object andtextural attributes of each of these segments was joined to the AUVtable in ArcGIS. Therefore every AUV class from Table 1 containedthe image processing information from Tables 2 and 3 within theoutput table. This data was exported and formatted in Excel forinclusion into the model for classification.
3.2.3.2. Classification of image objects. The next stage in object-based image analysis is the classification of the image objectsbased on selected object features. In this study, a supervised clas-sification is used. A supervised classification algorithm analyzes thetraining data and produces an inferred function, which is calleda classifier (if the output is discrete) or a regression function (if theoutput is continuous) (Lillesand and Kiefer, 1994). The inferredfunction allows all unclassified image segments to be classifiedbased on their distance in feature space and should predict thecorrect output value for any valid input object. This requires thealgorithm to generalize from the training data to unseen situationsin a “reasonable”way. In our analyses, training data consisted of thesubstratum, rugosity or sponge structure categories scored in 1250AUV images as the dependent variable. The previously generatedattributes of spatially co-located multibeam segments/imageobjects were the predictor variables. We compare the effectivenessof three different but most commonly used classification algo-rithms: classification trees, random forests and K-nearestneighbour.
Classification algorithm 1: Classification trees are used to predictmembership of cases or objects in the classes of a categoricaldependent variable from their measurements on one or morepredictor variables. Tree-based methods recursively split the dataintobinarygroupsbasedon thepredictorvariable thatmaximises thehomogeneity of two resulting groups (Breiman, 2001). They are alsovery flexible; they can handlemissing data and both continuous andcategorical predictor variables, and can model complex interactions(De’ath and Fabricius, 2000). Since the goal of classification trees is topredict or explain responses on a categorical dependent variable.
Classification algorithm 2: Random forests are an ensembleclassifier that combine the results of many decision trees by
assigning a sample/object the class that is the mode of the indi-vidual trees. Ensemblemethods aremore robust and generally havebetter prediction accuracies than single trees which can be sensi-tive to small changes in the data used to construct them (De’ath andFabricius, 2000). The training set is drawn by sampling withreplacement, where a proportion of data are left out of the sample.This oob (out-of-bag) data is used to get a running unbiased esti-mate of the classification error as trees are added to the forest. Oobis also used to get estimates of predictor variable importance(Breiman, 2001). In this analysis 50% of the AUV points weresampled for each of 10 trees constituting a forest.
Classification algorithm 3: K-nearest neighbour algorithm(KNN) is a method for classifying objects based on closest trainingexamples in the feature space and is commonly used in patternrecognition research. KNN is a type of instance-based learningwhere the function is only approximated locally and all computa-tion is deferred until classification. The KNN algorithm is amongstthe simplest of all machine learning algorithms as an object isclassified by a majority vote of the classes assigned to its KNNs (K isa positive integer, typically small). If K ¼ 1, then the object is simplyassigned to the class of its nearest neighbour. The neighbours aretaken from a set of objects for which the correct classification isknown. This can be thought of as the training set for the algorithm,though no explicit training step is required (Bremner et al., 2005).
3.3. Grid-based analysis of topographic variables (bathymetry only)
In OBIA, predictor variables are generated by summarizing themean and standard deviation of the 2 m grid values containedwithin each segment. In order to examine the influence ofsummarizing variables in this way a subsequent analysis was runusing the values of only the bathymetric variables in at their native2 m resolution as predictor variables. This grid-based analysis is themost common approach for habitat mapping. The downside of thisapproach is that backscatter cannot be incorporated into theanalysis utilizing the OBIA (vector based) method. Inclusion ofbackscatter would rely on the individual pixel intensity value andthe intensity value of a single backscatter pixel (in dB) from anuncalibrated multibeam does not contain any inherent value inattributing it to a substrate class. Therefore in this analysis we alsoexamine whether the inclusion of backscatter data improves theclassification and prediction accuracies of the models. The gridbased analysis was completed in ArcGIS 9.2 utilising a point (AUVclassified class) on cell overlay of all topographic layers listed inTable 2. Fig. 2 illustrates a flow diagram of the methods section.

V. Lucieer et al. / Estuarine, Coastal and Shelf Science 117 (2013) 94e106100
3.4. Evaluation of the model using error and confusion matrices
Error matrices were generated using Excel, to calculate theoverall prediction accuracy and producers and users accuracyresults for the best performing classification algorithm (Hagen-Zanker, 2009). The Kappa statistic was used to quantify thepredictive performance of the model (Lillesand and Kiefer, 1994).The Kappa statistic measures the degree of agreement between thevariables above that expected by chance alone. It has a maximum of1 when agreement is perfect, 0 when agreement is no better thanchance, and negative values when agreement is worse than chance.Other values can be interpreted as: <0.20 poor, <0.40 fair, <0.60moderate, <0.80 good and to 1 very good (Altman, 1991). The errormatrix also reports the confusion results (through the producersand uses accuracies) of the classification as the number of falsepositives, false negatives, true positives, and true negative valueswhich allows for more detailed analysis than mere proportion ofcorrect guesses (accuracy) (Lucieer and Bruce, 2007).
4. Results
4.1. Segmentation
Due to the fact that the segments capture the textural changes inthe seabed, they have irregular boundaries. The segmentation 30algorithm generated 7896 segments with an average length of100 m � 150 m which typically corresponded to 1e2 AUV pointsfalling within each segment. The segmentation 60 algorithmgenerated 2696 segments with an average length of 180 � 220 mwhich captured 3e4 classified AUV points per segment. Fig. 3illustrates what the segmentation result looks like prior to classi-fication at Blowhole, Waterfall Bluff and south of O’Hara Bluff; theassociated segments have no classification attribute.
4.2. Success of classification of habitat characteristics utilizingMBES derivatives
Classifications of the multibeam data were performed using thecategories of the hierarchy scored in the AUV imagery: substrate,rugosity and sponge cover. Overall, classification strength ofagreement, as indicated by the Kappa statistic, is considered ‘fair’for all of the AUV image characteristics that were classified. Accu-racies were highest for rugosity classes at 65%, followed bysubstratum classes at 61% and then sponge structure classes at 57%(Table 4). The Random forest classifier at a segmentation scale of 30performed best in classifying substratum and rugosity, while theKNN classifier performed best for sponge structure classes, with nodifference in accuracy between scale 30 and 60 (Table 4).
Fig. 2. Flow diagram of the research metho
Incorporating backscatter variables using segmentation improvedthe overall accuracy achieved by the best performing model bybetween 1% (for rugosity classes) and 9% (for substratum classes)above using only topographic (bathymetric) variables in the grid-based analyses.
For predicted rugosity using a random forest classifier atsegmentation level 30, 64.80% of the observations were in agree-ment again greater than the 49.31% expected by chance alone andresulting in a Kappa statistic of 0.306 (95% confidence interval0.245e0.366) (Table 6).
For predicted sponge structure using the KNN classifier atsegmentation level 30, 56.80% of the observations were in agree-ment, once again well over 28.97% expected by chance The Kappastatistic for the sponge structure classification was 0.392 (95%confidence interval 0.338e0.445) (Table 7).
Within each attribute there was considerable variation in theability of models to accurately classify the different classes. This canbe seenwhen classifying substratumwhere users accuracies for thecommonly occurring classes s3 and s7 (coarse sand and patchy reefrespectively) were quite high at around 71%. The greatest confusionin differentiating these image derived classes existed betweenseparating them from class s9, sediment veneer. Class s6, boulders,was completely confused acoustically (0% accuracy) with patchyreef/sand and coarse sand. Poor classification results were alsoobtained with class s2, sand and class s4, cobble which had fewtraining examples. For rugosity, high classification accuracies wereachieved for both class r1 (flat) and class r2 (low rugosity) butclasses r3 (moderate rugosity) and class r4 (high rugosity) werecompletely confused. For sponge structure, there was obviouslylittle confusion between no sponges and the three sponge classeswith producers’ accuracies of 70%. However, as the sponge profileincreased the producers accuracies fell from 62% to 16%. Generallyclasses with many training examples (i.e. >150) were much betterclassified than those with few examples (Tables 5e7).
4.3. Variable importance
The variable importance derived from the random forest clas-sifier for substrate [segmentation level 30] lists the most importantvariables (in order of importance) as mean bathymetric positionindex 10, mean bathymetry, mean backscatter, mean terrainrugosity, the standard deviation of backscatter and the standarddeviation of slope.
The variable importance derived from the random forest clas-sifier for rugosity [segmentation level 30] included mean back-scatter, mean terrain rugosity, mean bathymetry, GLCMhomogeneity, mean northness, and the standard deviation ofbackscatter. For both substrate and rugosity the common variables
ds from data processing to prediction.

Fig. 3. Segmentation at scale 30 shown for three sites on the Tasman Peninsula. A) Blowhole, B)Waterfall Bluff and C)South of O’Hara Bluff. The segmentation figure shows thecapture of homogenous textures and pattern in the multibeam backscatter product.
V. Lucieer et al. / Estuarine, Coastal and Shelf Science 117 (2013) 94e106 101
best used for prediction included the mean bathymetry, meanbackscatter, mean terrain rugosity and the standard deviation ofbackscatter.
The variable importance was not derived for sponge structurebecause the model with the highest classification accuracies wasKNN and ranking variable importance is not a feature of this model.
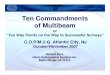
As mean backscatter ranked as a variable of high importance itwas further examined using a box and whisker plot, againstsubstrate, sponge and rugosity classes as shown in Fig. 4a, b and c.For the substrate class (Fig. 4a) the mean backscatter of class s2(sand) is well differentiated from classes s3, s4, s5, s6 and s9. Class
Table 4Classification accuracy results showing proportion correctly classified for a)substrate class results b) rugosity class results and c) sponge class results at bothsegmentation levels (segmentation 30 and 60) and using the topographic resultsonly (training points n ¼ 625, testing points n ¼ 625). Number in bold indicateshighest classification accuracy.
Randomforest
Classificationtree
KNN
a) SubstrateSeg 30 0.64 0.57 0.54Seg 60 0.55 0.57 0.57
Topography only 0.55 0.48 0.49b) RugositySeg 30 0.65 0.62 0.63Seg 60 0.62 0.61 0.60
Topography only 0.64 0.62 0.61c) SpongesSeg 30 0.54 0.55 0.57Seg 60 0.53 0.56 0.57
Topography only 0.50 0.49 0.49
s3 coarse sand and class s9 sediment veneer share some overlap.Classes s5, s6 and s7 cannot be differentiated from mean back-scatter alone. The mean backscatter of sponge classes Fig. 4b showsome slight differentiation between classes p1, p2 and p3 withclasses p3 and p4 totally overlapping. The mean backscatter plot ofrugosity Fig. 4c also shows some slight differentiation betweenclasses r1 and the other r3 but complete overlap between classes r2,r3 and r4.
4.4. Predicted patterns of habitat characteristics
Coarse sand was predicted to be the most common substratumin the study region covering 93.6 km2/80% shown in Fig. 5. This wasfollowed by patchy reef covering 16.05 km2 13.72%, sedimentveneer 4.43 km2/3.79%, rock 2.22 km2/1.9% and sand 0.41 km2/
Table 5Error matrix for substrate by random forest classifier using segmentation 30 using50% of features and 10 trees (refer to Table 1 for substrate class code).
Class 2s 3s 4s 5s 6s 7s 9s Total User’saccuracy
2s 0 3 0 0 0 0 1 4 03s 0 149 0 1 0 48 10 208 71.654s 0 1 0 0 0 0 0 1 05s 0 7 0 52 0 63 0 122 42.76s 0 4 0 0 0 18 0 22 07s 0 26 0 19 0 125 5 175 71.439s 0 51 0 0 0 30 12 93 12.9Total 0 241 0 72 0 284 28 625Producer’s
accuracy0 61.83 0 72.22 0 44.01 42.86 K ¼ 0.358

Table 6Error matrix for rugosity by random forest classifier using segmentation 30 using50% of features and 10 trees (refer to Table 1 for rugosity class code).
Class 1r 2r 3r 4r Total User’saccuracy
1r 319 57 0 0 376 84.842r 76 86 0 0 162 53.083r 21 33 0 0 54 04r 11 22 0 0 33 0Total 427 198 0 0 625Producer’s
accuracy74.71 43.43 0 0 K ¼ 0.306
V. Lucieer et al. / Estuarine, Coastal and Shelf Science 117 (2013) 94e106102
0.35%. In the north of the study region, near High Yellow Bluff, hardsubstrata consisted mostly of patchy reef and sediment veneer.Fewer substratum are predicted to be sediment veneer movingtowards the southern end of the study region. Reef areas aroundO’Hara Bluff are predicted to consist mostly of patchy reef withsome contiguous rock outcrops, while offshore at Hippolyte Rocksrocky outcroppings are more prevalent amongst patchy reef.
5. Discussion
We derive habitat classes from spatially precise, co-locatedimagery using a supervised classification method to train multi-beam datasets for the characterisation and prediction of marinesubstrates, seabed rugosity and sponge distribution in a shallowcoastal area. Twelve bathymetric variables and six backscattertexture variables were tested for their prediction capability todiscriminate six different substrate classes, four rugosity classesand four sponge classes, visually classified from AUV images.
The techniques described here demonstrate how reliable classesdefined visually can be used to separate acoustic data into attri-butes with known predictive power. Our results indicate that thereis fair correlation between the image derived classes and thesegments separated using texture and topography. The method-ology applied here is unique in that it allows us to ‘dismantle’ theintegrated acoustic image (backscatter and bathymetry) intomeaningful statistics whereby the correlation of textural objectsand topographic parameters can be quantified in their ability todiscriminate classes based on the visual interpretation of matchingco-located imagery.
Random forests are a promising method for developing auto-mated classification for substrate and rugosity. Random forestshave certain properties that make them particularly attractive forthese types of analyses. In particular the algorithm can be useful toestimate the importance of variables for classification. Such esti-mation is of value for feature extraction and explaining the bio-logical significance of variables. The random forest method showsthat four common variables are effective for the prediction of bothsubstrate and rugosity: mean bathymetry, mean backscatter, meanterrain rugosity and the standard deviation of backscatter, and that
Table 7Error matrix for sponges by KNN classifier using segmentation 30 using 50% offeatures (refer to Table 1 for sponge class code).
Class 1p 2p 3p 4p Total User’saccuracy
1p 101 21 20 8 150 67.332p 21 108 47 7 183 59.023p 15 40 136 35 226 60.184p 8 5 43 10 66 15.15Total 145 174 246 60 625Producer’s
accuracy70.0 62.07 55.29 16.67 K ¼ 0.392
by using the attributes derived from both backscatter and bathy-metric layers can increase classification success of image derivedclasses.
These variables can be defined as useful multibeam surrogatesfor the prediction of substrates. However, the real surrogacy valueof this information for informing biology will only be fully regardedonce this information is linked to available biological data throughfurther statistical analysis and modelling. The most popularapproach to such integration has been to model the presence ofbiological groups as a function of the environmental variablesthereby allowing species distributions to be extrapolated across anentire region of interest (Guisan and Zimmermann, 2000).
The (KNN) classifier produced the most accurate results for theprediction of sponges although these results were quite weak(Table 4c). This result could be explained by the scale of the acousticdata and the density of the sponge class (majority were in classesp2 and p3). Sponge habitat occurs on consolidated reef structureswhich generate a much stronger acoustic signal than the spongesthemselves and therefore limits the ability to separate out thesponge density. The prediction result, however, does show that itcan separate ‘no sponge’ from the three sponge classes, which ismost likely a differentiation between whether the sponges werepresent or not (Fig. 6). AUV images capture a plan view of theseafloor in which it is difficult to observe biota occurring under-neath algal canopies. This means sponges may indeed occur inshallow waters beneath canopy algae even though they are not thedominant structural component.
The error analysis of the classifiers showed that there was a fairdegree of independence within the data (Tables 5e7). This analysiswould have been strengthened by having more classified AUV dataavailable over awider range of seabed substrates. It would also havebeen beneficial to the analysis to have had extra transects thatcould be left out of the training data set that could be utilised toassess the accuracy of the final prediction result, not just the clas-sifier. Despite this, the error matrix was able to reveal the classifi-cation confusions between the acoustic and AUV imagery which isa novel aspect for this theme of research.
The error matrix for substrates shows that the user’s accuraciesfor classes s3, coarse sand and class s7, patchy reef sand were quitehigh at around 71%. The acoustic confusion with differentiatingthese image derived classes existed between separating them fromclass s9, sediment veneer. Acoustically it is understandable thatthese classes would be confused, as visually these classes arepossible in a variety of depths, exposures and contain shell frag-ments, rock and sand with occasional sponges (on shallowsubsurface rock), that would acoustically appear hard and rough,not allowing for any of the topographic or textural variable toseparate the classes with a greater degree of accuracy from 2mdataresolution. Class s6, boulders, was completely confused acoustically(0% accuracy) with patchy reef/sand and coarse sand. The scale ofthe visual and acoustic classes did not match appropriately due tothe size of the boulders and the acoustic footprint (2 m). Classes s2,sand and class s4, cobble, did not have enough representativesamples to make any conclusion regarding the confusion of theseclasses to acoustic attribution.
The error matrix for rugosity shows high classification accura-cies for both class r1 (flat) and class r2 (low rugosity) but classes r3(moderate rugosity) and class r4 (high rugosity) were completelyconfused between the AUV classifications. The difference betweenseabed that visually looks flat across the image is likely to beconsistent with the topographic variables of curvature, profilecurvature, planiform curvature, fine and broad scale bathymetricposition indexes and terrain rugosity, which also indicate if theseabed it flat. The differences in the cellular 3 � 3 cell analysis todefine degrees of rugosity and visually determining the rugosity of

Fig. 4. Mean backscatter plotted against a) substrate class, b) sponge class and c) rugosity class.
V. Lucieer et al. / Estuarine, Coastal and Shelf Science 117 (2013) 94e106 103
the seabed beyond undulations of 0.5 m (across an image of1.5 � 1.3 m) would be difficult to determine. It is unrealistic toexpect that classes r3 and r4 might show some correlation to theacoustic derived variables beyond that of flat and rugose. Imagesare easier to tell apart between flat and slightly rugose and throughthe subjective nature of the interpretation of the human interpreterthe plan view of the AUV it is difficult to classify between subtlechanges in seabed rugosity due to a lack of a point of reference. Ifthis is the case thenwe need to be aware that if themodel is trainedby inaccurate classification of rugosity due to this reason then thepredictions will also be poor.
The error matrix results for the prediction of sponges using theKNN classifier showed quite poor accuracy results. The most influ-encing factor regarding this prediction result might be the scale ofthe multibeam data at a 2 m grid cell is not representative of thecomplexity and diversity in sponge cover at amuchfiner scale and istherefore not adequately captured from the acoustics. Furthermore,there are multiple factors influencing sponge distribution anddensity including exposure, water currents, and algal cover whichhave as much influence on sponge size as can be predicted from thephysical substrate characteristics from the multibeam data.
Whilst the classification methods were reasonably accuratea discrepancy exists between what can be acoustically
discriminated and what is visually observed. This may be due toa number of factors including: 1) the data available for models/algorithms (some classes did not have enough examples); 2) howthe data is seen acoustically vs. visually (related to frame of refer-ence etc.); 3) for sponges, other factors affect the distribution ofbiota; and 4) even though the AUV images were good for charac-terizing different types of hard-substrata they are not so good fordiscriminating differences in sediment types (e.g. sand vs. coarsesand vs. mud).
Multibeam acoustic surveys map large areas of seabed quickly,simultaneously collecting bathymetry and backscatter information(Brown et al., 2011a,b). MBES backscatter is complex to process andis seldom considered as a predictor variable in biological studies. Inthose few studies that have incorporated backscatter data withbiological data in the model-building process backscatter wasfound to be an important variable in describing the distribution ofbenthic biota at fine scales (Rattray et al., 2009; Williams et al.,2010; Anderson et al., 2011; Ierodianconou et al., 2011).
The combination of MBES bathymetry and backscatter providesa robust means of producing maps of the substratum of theseafloor. This important stage is achieved through the segmenta-tion process of the MBES data into acoustic regions on the seafloorthat have similar acoustic properties. Conventional interpretation is

Fig. 5. Predicted substrate classification map for the Tasman Peninsula derived fromthe segmentation 30 OBIA analysis and the random forest prediction result.
Fig. 6. Predicted sponge classification map for the Tasman Peninsula derived from thesegmentation 30 OBIA analysis and the random forest prediction result.
V. Lucieer et al. / Estuarine, Coastal and Shelf Science 117 (2013) 94e106104
usually carried out subjectively by eye, and has proven to beeffective where distinct seabed features (such as sediment bedforms or rocky reefs) display characteristic backscatter responses,or where there are sharp demarcations between neighbouringsubstrate types (Hughes-Clarke, 1998; Todd et al., 1999; Edwardset al., 2003). However, effective segmentation is far more difficultin areas where the level of seabed heterogeneity is high or wherethere is a gradual change in the seabed characteristics without cleardemarcations in backscatter behaviour (Brown and Collier, 2008;Brown et al., 2011a,b; Lucieer and Lamarche, 2011). In this study,the inclusion of variables derived from backscatter greatlyimproved the predictive or explanatory power of models for twovariables. In particular, relatively influential predictors were meanbackscatter (i.e. substratum ‘hardness’) and standard deviation ofbackscatter (i.e. ‘roughness’). Textural ‘hardness’ indicates thecontinuous nature of the reef (i.e. whether parts of it are inundatedwith sediment). Higher hardness values were generally associatedwith the presence of sessile biota, which is logical as this equates tothe presence of more exposed hard substratum for attachment.
Roughness indicates substratum complexity with higher valuesassociated with the presence of biota and is consistent with otherstudies that have found substratum complexity to be an importantpredictor of biota (Garza-Perez et al., 2004; Woodby et al., 2009;Pittman et al., 2009). In our study complexity measures derivedfrom backscatter were often more influential surrogates for biotathan the traditional measure of rugosity derived from bathymetry.Both measures of complexity were correlated (rho ¼ 0.7) and someredundancy likely exists when using both topographic and texturalpredictor variables.
Backscatter data were also an integral component of the inno-vative segmentation technique used in this study to classify andpredict substrata across the entire study region. This method allowsthe quantitative delineation of hard substrata prior to running anybiological predictions. This allowed us to confine predictions ofsessile organisms to reef areas only and reduced the computingtime needed to run bootstrap predictions. In addition, substratumtype (e.g. patchy vs. contiguous reef) was often an important vari-able describing the occurrence of biota. Future surrogate and

V. Lucieer et al. / Estuarine, Coastal and Shelf Science 117 (2013) 94e106 105
species distribution modelling studies could benefit from utilisingthe backscatter data that is often collected simultaneously withbathymetry data. We suggest that backscatter data be used for thepredictive classification of substrata and that the basic variables ofmean and standard deviation of segment-level backscatter be usedin conjunction with biological data in the model building process.
6. Conclusion
These successful prediction models demonstrated the potentialfor using relatively few physical factors, derived from multibeamdata, to predict AUV class distribution of substrate, rugosity andsponge cover. Significant amongst these results is that the topo-graphic variables alone could be used to predict the rugosity classesof the AUV consolidated reef habitat, but where other aspects ofhabitat complexity were examined, inclusion of backscatterderived variables further increased the accuracy of class prediction.
The techniques outlined in this paper allow us to dismantlemultibeam acoustic data into spatial layers that can be useful forbiological modelling. The results allow us to identify multibeamvariables which act as potential surrogates for biodiversity anddefine which variables may be reliable for predicting the occur-rence of species in temperate waters. This research has identifiedthat there are some class relationships between the qualitative AUVvisually identified classes and quantifiable environmental charac-teristics that can be measures by multibeam acoustics. This paperidentifies the extraction of these derivatives to predict seafloorsubstratum and a method to identify which variables are importantfor defining the probabilistic distribution of biological communitiesassociated with benthic substrates.
This research provides a technique for quantitatively interpret-ing the combined multibeam acoustic products of backscatter andbathymetry into detailed spatially-explicit (i.e. full-coverage)seabed maps of substrate, rugosity and sponge cover. It highlightsthe value of processing multibeam data to generate multiple vari-able parameters in order to extract maximum value from a productwhich is expensive and time consuming to acquire in the firstinstance. This novel prediction modelling approach combiningshipboard multibeam and AUV imagery advances the research inthis discipline for biodiversity and marine surrogacy research.Firstly it links the multibeam and image based datasets witha common classification scheme, and secondly it explores therelationship of biologically significant habitat classes to geomor-phic characteristics. The image derived data is therefore strength-ened in its utilization, as we can extrapolate the biophysicalrelationships (with known confidence) into a far greater space thancould be determined by image based surveys alone.
Ultimately, this method, when fully refined, may allow us toextrapolate results from fine-scale but spatially limited imageryderived fromAUV platforms deployed appropriately within areas ofmore comprehensive multibeam data coverage to create reliablepredictive models of the distribution of biodiversity within ourcoastal systems. It is necessary, however, to have an understandingof the accuracy of the classification and prediction process to assessthe most accurate classes to represent from the acoustic datawhichcan inform the foundation of broad scale assessment.
Acknowledgements
This work has been funded through the Commonwealth Envi-ronment Research Facilities (CERF) program, an AustralianGovernment initiative supporting world class, public-goodresearch. The CERF Marine Biodiversity Hub is a collaborativepartnership between the University of Tasmania, CSIRO Wealthfrom Oceans Flagship, Geoscience Australia, Australian Institute of
Marine Science and Museum Victoria. We would like to thankSteffan Williams, the Australian Centre for Field Robotics(ACFR) and the Integrated Marine Observing System (IMOS) foraccess to and running the AUV Sirius; Lisa Meyer, Pauline Vouroit,Jo Dowdney and Justin Hulls for scoring images. The authors wouldalso like to acknowledge the reviewers for their valuable commentswhich improved this manuscript.
References
Ahsan, N., Jakuba, M., Pizarro, O., Williams, S.B., Radford, B., 2010. Learningpredictive habitat models using bathymetry, seabed terrain features and opticalimagery. In: Oceans 2010. Seattle, Washington.
Altman, D.G., 1991. Practical Statistics for Medical Research. Chapman & Hall, Lon-don, England.
Anderson, T.J., Nichol, S.L., Syms, C., Przeslawski, R., PT, H., 2011. Deep-sea bio-physical variables as surrogates for biological assemblages, an example fromthe Lord Howe Rise. Deep Sea Research Part II: Topical Studies in Oceanography58, 979e991.
Barkby, S., Williams, S.B., Pizarro, O., Jakuba, M., 2009. Incorporating prior bathy-metric maps with distributed particle bathymetric SLAM for improvedAUV navigation and mapping. In: OCEANS 2009 MTS/IEEE Biloxi Conf. &Exhibition: 6.
Barrett, N.S., Edgar, G.J., 2010. Distribution of benthic communities in the fjord-likeBathurst Channel ecosystem, south-western Tasmania, a globally anomalousestuarine protected area. Aquatic Conservation: Marine and FreshwaterEcosystems 20 (4), 397e406.
Bell, J.J., Barnes, D.K.A., 2000. The influences of bathymetry and flow regime uponthe morphology of sublittoral sponge communities. Journal of the MarineBiological Association of the United Kingdom 80 (4), 707e718.
Benz, U.C., Hofmann, P., Willhauck, G., Lingenfelder, I., Heynen, M., 2004. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-readyinformation. ISPRS Journal of Photogrammetry and Remote Sensing 58 (3e4),239e258.
Breiman, L., 2001. Random forests. Machine Learning 45 (1), 5e32.Bremner, D., Demaine, E., Erickson, J., Iacono, J., Langerman, S., Morin, P.,
Toussaint, G., 2005. Output-sensitive algorithms for computing nearest-neighbour decision boundaries. Discrete & Computational Geometry 33 (4),593e604.
Brooke, B., Creasey, J., Sexton, M., 2010. Broad-scale geomorphology and benthichabitats of the Perth coastal plain and Rottnest Shelf, Western Australia,identified in a merged topographic and bathymetric digital relief model.International Journal of Remote Sensing 31 (23), 6223e6237.
Brown, C.J., Collier, J.S., 2008. Mapping benthic habitat in regions of gradationalsubstrata: an automated approach utilising geophysical, geological, and bio-logical relationships. Estuarine, Coastal and Shelf Science 78 (1), 203e214.
Brown, C.J., Smith, S.J., Lawton, P., Anderson, J.T., 2011a. Benthic habitat mapping:a review of progress towards improved understanding of the spatial ecology ofthe seafloor using acoustic techniques. Estuarine, Coastal and Shelf Science 92(3), 502e520.
Brown, C.J., Todd, B.J., Kostylev, V.E., Pickrill, R.A., 2011b. Image-based classificationof multibeam sonar backscatter data for objective surficial sediment mapping ofGeorges Bank, Canada. Continental Shelf Research 31 (Suppl. 2), S110eS119.
De’ath, G., Fabricius, K.E., 2000. Classification and regression trees: a powerful yetsimple technique for ecological data analysis. Ecology 80, 3178e3192 (0012-9658 81).
De Falco, G., Tonielli, R., Di Martino, G., Innangi, S., Simeone, S., Parnum, I.M.,2010. Relationships between multibeam backscatter, sediment grain size andPosidonia oceanica seagrass distribution. Continental Shelf Research 30,1941e1950.
Edwards, B.D., Dartnell, P., Chezar, H., 2003. Characterising benthic substrates ofSanta Monica Bay with seafloor photography and multibeam sonar imagery.Marine Environmental Research 56 (1), 47e66.
Eyre, B., Maher, D., 2011. Mapping ecosystem processes and function across shallowseascapes. Continental Shelf Research 31, S162eS172.
Fonseca, L., Brown, C., Calder, B., Mayer, L., Rzhanov, Y., 2009. Angular range analysisof acoustic themes from Stanton Banks Ireland: a link between visual inter-pretation and multibeam echosounder angular signatures. Applied Acoustics70, 1298e1304.
Gagnon, P., Schelibling, R.E., Jones, W., Tully, D., 2008. The role of digital bathymetryin mapping shallow water marine vegetation from hyperspectral image data.International Journal of Remote Sensing 29 (3), 879e904.
Garza-Perez, J.R., Lehmann, A., Arias-Gonzalez, J.E., 2004. Spatial prediction of coralreef habitats: integrating ecology with spatial modelling and remote sensing.Marine Ecology Progress Series 269, 141e152.
Gavrilov, A.N., Duncan, A.J., McCauley, R.D., Parnum, I.M., Penrose, J.D., Siwabessy,P.J.W., Woods, A.J., Tseng, Y.-T., 2005. Characterization of the Seafloor in Aus-tralia’s Coastal Zone using acoustic techniques. In: Proceedings of the Inter-national Conference "Underwater Acoustic Measurements: Technologies &Results", Crete, Greece.
Guisan, A., Zimmermann, N.E., 2000. Predictive habitat distribution models inecology. Ecological Modelling 135, 147e186.

V. Lucieer et al. / Estuarine, Coastal and Shelf Science 117 (2013) 94e106106
Hagen-Zanker, A., 2009. An improved fuzzy kappa statistic that accounts for spatialautocorrelation. International Journal of Geographical Information Science 23(1), 61e73.
Haralick, R.M., Shanmugam, K., Dinstein, R., 1973. Textural features for imageclassification. IEEE Transactions Systems, Man and Cybernetics 3, 610e621.
Heap, A.D., Hughes, M., Anderson, T., Nichol, S., Hashimoto, T., Daniell, J.,Przeslawski, R., Payne, D., Radke, L., Party, S., 2009. Seabed Environmentsand Subsurface Geology of the Capel and Faust Basins and Gifford Guyot,Eastern Australia e Post Survey Report., Geoscience Australia. Record 2009/22 166 p.
Hosack, G., Dumbauld, B., Ruesink, J., Armstrong, D., 2006. Habitat associations ofestuarine species: comparisons of intertidal mudflat, seagrass (Zosteramarina), and oyster (Crassostrea gigas) habitats. Estuaries and Coasts 29 (6),1150e1160.
Hughes-Clarke, J.E., 1998. The effects of fine scale seabed morphology and textureon the fidelity of swath bathymetric sounding data. In: Canadian HydrographicConference, Victoria, Canada.
Ierodianconou, D., Monk, J., Rattray, A., Laurenson, L., Versace, V.L., 2011. Compar-ison of automated classification techniques for predicting biological commu-nities using hydroacoutics and video observations. Continental Shelf Research31, S28eS38.
Jenness, J., 2002. Surface Areas and Ratios from Elevation Grid (surfgrids.avx)Extension for ArcView 3.x. J. Enterprises, Flagstaff AZ, USA. Available at: http://www.jennessent.com/arcview/grid_tools.htm.
Jordan, A.R., Lawler, M., Halley, V., Barrett, N., 2005. Seabed habitat mapping in theKent Group of Islands and its role in marine protected area planning. AquaticConservation: Marine and Freshwater Ecosystems 15, 51e70.
Kim, M., Warner, T.A., Madden, M., Atkinson, D.S., 2011. Multi-scale GEOBIA withvery high spatial resolution digital aerial imager: scale, texture and imageobjects. International Journal of Remote Sensing 32 (10), 2825e2850.
Kloser, R.J., Penrose, J.D., Butler, A.J., 2010. Multibeam backscatter measurementsused to infer seabed habitats. Continental Shelf Research 30, 1772e1782.
Kostylev, V.E., Todd, B.J., Fader, G.B.J., Courtney, R.C., Cameron, G.D.M., Pickrill, R.A.,2001. Benthic habitat mapping on the Scotian Shelf based on multibeambathymetry, surficial geology and sea floor photographs. Marine EcologyProgress Series 219, 121e137.
Le Gonidec, Y., Lamarche, G., Wright, I.C., 2003. Inhomogeneous substrate analysisusing EM300 backscatter imagery. Marine Geophysical Researches 24 (3e4),311e327.
Lillesand, T.M., Kiefer, R.W., 1994. Remote Sensing and Image Interpretation, thirded. John Wiley and Sons Inc, New York.
Livingstone, D., Raper, J., McCarthy, T., 1999. Integrating aerial videography anddigital photography with terrain modelling: an application for coastalgeomorphology. Geomorphology 29 (1e2), 77e92.
Lucieer, A., Stein, A., Fisher, P., 2005. Multivariate texture based segmentation ofremotely sensed imagery for extraction of objects and their uncertainty.International Journal of Remote Sensing 26 (14), 2917e2936.
Lucieer, V., Bruce, E., 2007. Thematic accuracy assessment of acoustic seabed datafor shallow benthic habitat mapping. International Journal of EnvironmentalStudies 64 (1), 93e107.
Lucieer, V., Lamarche, G., 2011. Unsupervised fuzzy classification and object-basedimage analysis of multibeam data to map deep water substrates, Cook Strait,New Zealand. Continental Shelf Research 31 (11), 1236e1247.
Marsh, I., Brown, C., 2009.Neuralnetwork classificationofmultibeambackscatterandbathymetry data from Stanton Bank (Area IV). Applied Acoustics 70, 1269e1276.
McGonigle, C., Brown, C., Quinn, R., Grabowski, J., 2009. Evaluation of image-basedmultibeam sonar backscatter classification for benthic habitat discrimination andmapping at Stanton Banks, UK. Estuarine, Coastal and Shelf Science 81, 423e437.
Nichol, S.L., Anderson, T.J., McArthur, M., Barrett, N., Heap, A.D., Siwabessy, P.J.W.,Brooke, B., 2009. Southeast Tasmania Temperate Reef Survey, Post SurveyReport., Geoscience Australia: 73 p.
Pittman, S.J., Bryan, C.M., Battista, T.A., 2009. Using Lidar bathymetry and boostedregression trees to predict the diversity and abundance of fish and corals.Journal of Coastal Research 25, 27e38.
Post, A., 2006. Physical Surrogates for Benthic Organisms in the Southern Gulf ofCarpentaria: Testing and Application to the Northern Planning Area. GeoscienceAustralia, Canberra, Australia, p. 46.
Rattray, A., Ierodiaconou, D., Laurenson, L., Burq, S., Reston, M., 2009. Hydro-acoustic remote sensing of benthic biological communities on the shallowSouth East Australian continental shelf. Estuarine, Coastal and Shelf Science 84(2), 237e245.
Stevens, T., Connolly, R.M., 2004. Testing the utility of abiotic surrogates for marinehabitat mapping at scales relevant to management. Biological Conservation 119,351e362.
Stevens, T., Connolly, R.M., 2005. Local-scale mapping of benthic habitats to assessrepresentation in a marine protected area. Marine and Freshwater Research 56,111e123.
Talukdar, K.K., Tyce, R.C., Clay, C.S., 1995. Interpretation of Sea Beam backscatterdata collected at the Laurentian fan off Nova Scotia using acoustic backscattertheory. Journal of the Acoustical Society of America 97 (3), 1545e1558.
Todd, B.J., Fader, G.B.J., Courtney, R.C., Pickrill, R.A., 1999. Quaternary geology andsurficial sediment processes; Browns Bank, Scotian Shelf; based on multibeambathymetry. Marine Geology 162 (1), 165e214.
Trias-Sanz, R., Stamon, G., Louchet, J., 2008. Using colour, texture and hierarchicalsegmentation for high-resolution remote sensing. ISPRS Journal of Photo-grammetry and Remote Sensing 63, 156e168.
Ward, T.J., Vanderklift, M.A., Nicholls, A.O., Kenchington, R.A., 1999. Selectingmarine reserves using habitats and species assemblages as surrogates for bio-logical diversity. Ecological Applications 9 (2), 691e698.
Weiss, A.D., 2001. Topographic Positions and Landform Analysis. In: ESRI Interna-tional User Conference, San Diego California, ESRI.
Williams, A., Althaus, F., Dunstan, P.K., Poore, G.C.B., Bax, N.J., Kloser, R.J.,McEnnulty, F.R., 2010. Scales of habitat heterogeneity and megabenthos biodi-versity on an extensive Australian continental margin (100e1100 m depths).Marine Ecology 31 (1), 222e236.
Wilson, M., O’Connell, B., Brown, C., Guinan, J.C., Grehan, A.J., 2007. Multiscaleterrain analysis of multibeam bathymetry data for habitat mapping on thecontinental slope. Marine Geodesy 30, 3e35.
Woodby, D., Carlile, D., Hulbert, L., 2009. Predictive modeling of coral distribution inthe Central Aleutian Island, USA. Marine Ecology Progress Series 397, 227e240.