Embed Size (px)
Citation preview

1
DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE ADQUISICIÓN DE DATOS
PARA EL ANÁLISIS ESTRUCTURAL DEL AVIÓN CON MATRICULA 1008 DE
LA FUERZA AÉREA COLOMBIANA.
ADRIAN JOSÉ NIEVES RICO
IVÁN DARÍO LÓPEZ OSSA
UNIVERSIDAD DE SAN BUENAVENTURA
FACULTAD DE INGENIERÍA
BOGOTÁ D.C.
2005

2
Diseño y construcción de un sistema de adquisición de datos para el análisis
del avión con matricula 1008 de la Fuerza Aérea Colombiana.
ADRIAN JOSÉ NIEVES RICO
IVÁN DARÍO LÓPEZ OSSA
Trabajo de grado para optar por el título de
Ingeniero Electrónico
ASESOR
Ing. Pedro Luís Muñoz
UNIVERSIDAD DE SAN BUENAVENTURA
FACULTAD DE INGENIERÍA
BOGOTÁ D.C.
2005
3
NOTA DE ACEPTACIÓN PRESIDENTE DEL JURADO JURADO JURADO
BOGOTÁ, DICIEMBRE DEL 2005

4
A nuestras familias, y compañeros que nos apoyaron y depositaron toda su confianza durante el tiempo que estudiamos.

5
AGRADECIMIENTOS
Los autores expresan sus agradecimientos a:
Capitán Camilo Rodríguez, Director del proyecto, Grupo Técnico. Comando Aéreo
de Transporte Militar Fuerza Aérea Colombiana (CATAM).
El Ing. Yamid Garzón, Docente. Universidad de San Buenaventura, por su
colaboración incondicional.
El Ing. Hugo zapata, Docente. Sena
Al asesor de investigación Ing. Pedro Muñoz, por su constante apoyo y sus
valiosas orientaciones.

6
CONTENIDO
LISTA DE TABLAS x
LISTA DE FIGURAS xi
LISTA DE CUADROS xiii
LISTA DE ANEXOS xiv
GLOSARIO xv
RESUMEN xvii
TÍTULO 18
INTRODUCCIÓN 19
1. PLANEAMIENTO DEL PROBLEMA 20
1.1 DESCRIPCIÓN DEL PROBLEMA
1.1.1 FORMULACIÓN DEL PROBLEMA
1.2 JUSTIFICACIÓN 21
1.3 OBJETIVOS 21
1.3.1 OBJETIVO GENERAL
1.3.2 OBJETIVOS ESPECÍFICOS
1.4 ALCANCES Y LIMITACIONES DEL PROYECTO 22
1.4.1 ALCANCES
1.4.2 LIMITACIONES 23
2. MARCO DE REFERENCIA 24
2.1 MARCO CONCEPTUAL
2.1.1 El SISTEMA DE ADQUISICIÓN DE DATOS
2.1.1.1 TRANSDUCTOR 27
2.1.1.2 ETAPA ACONDICIONAMIENTO SEÑAL 27
2.1.1.2.1 AMPLIFICACIÓN
2.1.1.2.2 AISLAMIENTO 28

7
2.1.1.2.3 MULTIPLEXADO
2.1.1.2.4 FILTRADO
2.1.1.2.5 LINEALIZACIÓN 29
2.1.1.2.6 EXCITACIÓN
2.1.1.3 PUENTE DE MEDIDA CON DOS GALGAS
MEDIO PUENTE 30
2.1.2 CONTROLADOR Y MICROCONTROLADOR
2.1.2.1 CONVERSOR ANÁLOGO DIGITAL CAD 32
2.1.2.2 CONVERSOR DIGITAL ANÁLOGO CDA
2.1.3 BUS SERIE I2C 33
2.2 MARCO LEGAL O NORMATIVO 33
2.3 MARCO TEÓRICO 33
2.3.1 ELECCIÓN DE UN SENSOR
2.3.1.1 CARACTERÍSTICAS DE SALIDA 34
2.3.1.2 CARACTERÍSTICAS DE ALIMENTACIÓN
2.3.1.3 CARACTERÍSTICAS AMBIENTALES
2.3.1.4 OTROS FACTORES
2.3.2 CARACTERÍSTICAS ESTÁTICAS 35
2.3.2.1 EXACTITUD
2.3.2.2 PRECISIÓN
2.3.2.2.1 VALOR EXACTO
2.3.2.2.2 ERROR
2.3.2.2.2.1 ERROR ABSOLUTO 36
2.3.2.2.2.2 ERROR RELATIVO
2.3.2.2.3 INDICE DE CLASE
2.3.2.2.4 COMPATIBILIDAD ENTRE RESULTADO
Y ERROR

8
2.3.2.2.5 FIDELIDAD
2.3.2.2.6 REPETIBILIDAD 37
2.3.2.2.6.1 REPRODUCIBILIDAD
2.3.2.2.7 DERIVAS
2.3.2.2.8 RESOLUCIÓN 38
2.3.2.3 DETERMINACIÓN DEL ERROR EN LOS EQUIPOS
DE MEDIDA
2.3.3 INTRODUCCIÓN AL SENSOR DE DEFORMACIONES 39
2.3.3.1 MATERIAL UTILIZADO
2.3.3.2 CÓMO SE USA LA INFORMACIÓN 40
2.3.3.3 MONTAJE DE LOS SENSORES
2.3.3.4 MEDICIÓN DE PEQUEÑOS CAMBIOS EN LA
RESISTENCIA.
2.3.3.4.1 PUENTE BÁSICO DE RESISTENCIA 42
2.3.3.4.3 EFECTOS TÉRMICOS 43
2.3.3.5 AUMENTO EN LA SALIDA DEL PUENTE 45
2.3.4 AMPLIFICADORES DE INSTRUMENTACIÓN 48
2.3.4.1 INTRODUCCIÓN
2.3.4.2 FUNCIONAMIENTO DEL CIRCUITO
2.3.5 DETECCIÓN Y MEDICIÓN MEDIANTE EL AMPLIFICADOR
DE INSTRUMENTACIÓN 50
2.3.5.1 MEDICIONES DE VOLTAJE
2.3.5.2 AMPLIFICADOR COMO CAS 54
2.3.6 MICROCONTROLADOR PIC 54
2.3.6.1 CONTROLADOR Y MICROCONTROLADOR
2.3.6.2 DIFERENCIAS 55
2.3.6.3 ¿QUÉ MICROCONROLADOR EMPLEAR? 59
2.3.6.3.1 COSTES

9
2.3.6.3.2 APLICACIÓN
2.3.6.4 RECURSOS COMUNES 62
2.3.6.5 RECURSOS ESPECIALES 70
2.3.6.6. HERRAMIENTAS PARA EL DESARROLLO 75
2.3.6.7 CARACTERÍSTICAS RELEVANTES 77
2.3.6.8 REGISTROS GAMA MEDIA 78
2.3.6.8.1 MEMORIA DE DATOS
2.3.7 EL BUS SERIE I2C 85
2.3.7.1 MEMORIA I2C 90
2.3.7.2 PROCESO DE ESCRITURA 91
2.3.7.3 PROCESO DE LECTURA 93
2.3.8 MAX 232 97
3. METODOLOGÍA 98
3.1 ENFOQUE DE LA INVESTIGACIÓN
3.2 LÍNEA DE INVESTIGACIÓN USB
3.3 TÉCNICAS DE RECOLECCIÓN DE INFORMACIÓN 103
3.4 POBLACIÓN Y MUESTRA
3.5 HIPÓTESIS
3.6 VARIABLES
101
3.6.1 VARIABLES INDEPENDIENTES
3.6.2 VARIABLES DEPENDIENTES
4. PRESENTACIÓN Y ANÁLISIS DE RESULTADOS 107
5. DISEÑO INGENIERÍL 114
6. CONCLUSIONES 133
7. RECOMENDACIONES 134
BIBLIOGRAFÍA 146
ANEXOS 147
10
LISTA DE TABLAS
TABLA 1. REGISTROS GAMA MEDIA 81
TABLA 2. DIRECCIONAMIENTO DE LA MEMORIA PARA FAMILIA PCF 87
TABLA 3. LÍNEA DE INVESTIGACIÓN NÚMERO 2: TECNOLOGÍAS
ACTUALES Y SOCIEDAD. 100
TABLA 4. SUBLÍNEA DE INVESTIGACIÓN NÚMERO 1:
PROCESAMIENTO DE SEÑALES DIGITALES Y ANALÓGICAS 102
TABLA 5. REGISTROS EN EXCEL 110
TABLA 6. TIEMPOS DE ADHESIÓN 135
11
LISTA DE FIGURAS
FIGURA 1. ESQUEMA DE BLOQUES DE UN SAD 24
FIGURA 2. PUENTE DE WHEASTONE 30
FIGURA 3. FIDELIDAD 37
FIGURA 4. SENSOR DE DEFORMACIÓN 40
FIGURA 5. ARREGLO DEL PUENTE DE RESISTENCIAS 43
FIGURA 6. GALGA DE COMPENSACIÓN 44
FIGURA 7. AUMENTO EN LA SALIDA DEL PUENTE DE SENSOR 47
FIGURA 8. AMPLIFICADOR DE INSTRUMENTACIÓN 50
FIGURA 9. TERMINALES DE DETECCIÓN 52
FIGURA 10. AMPLIFICADOR DE INSTRUMENTACIÓN AD 620 53
FIGURA 11. MEMORIA DEL MICROCONTRADOR 61
FIGURA 12. ARQUITECTURA DEL MICROCONTROLADOR 64
FIGURA 13. INTERCONEXIÓN DE ENTRE PERIFERICOS 85
FIGURA 14. NIVELES DE SEÑAL EN EL BUS I2C 88
FIGURA 15. FORMATO DE TRANSMISIÓN 89
FIGURA 16. FORMATO DE ACUSE DE RECEPCIÓN 90
FIGURA 17. ENCAPSULADO I2C 90
FIGURA 18. TRAMA DE ESCRITURA 93
FIGURA 19. TRAMA DE LECTURA 95
FIGURA 20. CONFIGURACIÓN MAX 232 97
FIGURA 21. VISUALIZACIÓN SOFTWARE 107
FIGURA 22. VISUALIZACIÓN 6 GALGAS 108
FIGURA 23. VISUALIZACIÓN DATOS 1 GALGA 109
FIGURA 24. PRUEBAS EN LA MÁQUINA UNIVERSAL DE ENSAYOS 111
FIGURA 25. MÁQUINA UNIVERSAL DE ENSAYOS 112

12
FIGURA 26. PROBETAS 113
FIGURA 27. UBICACIÓN DE LA GALGA EN LA PROBETA 113
FIGURA 28. DIAGRAMA DE BLOQUES 114
FIGURA 29. PUENTE DE WHEASTONE BALANCEADO 116
FIGURA 30. DIAGRAMA ESQUEMÁTICO CAS 119
FIGURA 31. DISTRIBUCIÓN DE PINES PIC 16F876 120
FIGURA 32. DIAGRAMA ESQUEMÁTICO DAQ 124
FIGURA 33. GALGA Y TERMINAL ADHERIDAS A LA CINTA 139
FIGURA 34. GALGA Y TERMINAL ALINEADAS EN LA ESTRUCTURA 140
FIGURA 35. LEVANTAR LA CINTA EN UN ÁNGULO AGUDO 141
FIGURA 36. POSICIONAR LA CINTA 141
FIGURA 37. APLICACIÓN DEL ADHESIVO 142
FIGURA 38. ADHESIÓN 143
FIGURA 39. APLICACIÓN DE PRESIÓN. 144
FIGURA 40. CÓMO RETIRAR LA CINTA. 145

13
LISTA DE CUADROS
CUADRO 1. REGISTRO DE ESTADOS 82
CUADRO 2. REGISTRO DE OPCIONES 83
CUADRO 3. REGISTRO DE INTERRUPCIONES 84
CUADRO 4. REGISTRO IDENTIFICADOR DEL RESET 84

14
LISTA DE ANEXOS
ANEXO 1. PARTE LEGAL 147
ANEXO 2. PRESUPUESTO 148
ANEXO 3. CRONOGRAMA 149
ANEXO 4. TABLA DE CALIBRACIÓN 150
ANEXO 5. MANUAL DEL DAQ 160

15
GLOSARIO
SAD: SISTEMA DE ADQUISICIÓN
E/S: ENTRADA/SALIDA
CPU: UNIDAD CENTRAL DE PROCESO
FAC: FUERZA AÉREA COLOMBIANA
RAM: MEMORIA VOLÁTIL
ROM: MEMORIA NO VOLÁTIL, DE SÓLO LECTURA
EPROM: ERASABLE PROGRAMMABLE READ ONIY MEMORY
EEPROM: ELECTRICAL ERASABLE PROGRAMMABLE READ ONIY
MEMORY
CAD: CONVERSOR ANÁLOGO DIGITAL
CDA: CONVERSOR DIGITAL ANÁLOGO
CAS: CIRCUITO ACONDICIONADOR DE SEÑAL
CISC: COMPUTADORES DE JUEGO DE INSTRUCCIONES
COMPLEJO
RISC: COMPUTADOR DE JUEGO DE INSTRUCCIONES REDUCIDO.
SISC: COMPUTADORES DE JUEGO DE INSTRUCCIONES
ESPECÍFICO
OTP: ONE TIME PROGRAMMABLE, PROGRAMABLE UNA SOLA
VEZ.
FLASH: MEMORIA VOLÁTIL DE BAJO CONSUMO, QUE SE PUEDE
ESCRIBIR Y BORRAR.
TEMPORIZADOR: MODULADOR DE ANCHURA DE IMPULSOS
WATCHDOG: PERRO GUARDIAN.
BROWNOUT: MODULADOR DE ANCHURA DE IMPULSOS
PWM: MODULADOR DE ANCHURA DE IMPULSOS
VDD: VOLTAJE DE ALIMENTACIÓN.

16
UART: ADAPTADOR DE COMUNICACIÓN SERIE ASÍNCRONA
USART: ADAPTADOR DE COMUNICACIÓN SERIE SÍNCRONA Y
ASÍNCRONA
USB: UNIVERSAL SERIAL BUS
CAN: CONTROLLER AREA NETWORK
LCD: DISPLAY DE CRISTAL LIQUIDO
LED: DIODO EMISOR DE LUZ
PIC: MICROCONTROLADOR DE MICROCHIP
SLAVE: ESCLAVO
MASTER: MAESTRO
SCL: SEÑAL DE RELOJ
SDA: LÍNEA DE DATOS

17
RESUMEN
La necesidad de estudiar el comportamiento estructural de los planos de los
aviones C-130 Hércules de la FAC, conlleva a la necesidad de buscar alternativas
utilizando nuevas tecnologías, de allí nace este proyecto de grado, ya que en
nuestro país es difícil encontrar herramientas adecuadas para esta análisis, con
esto se busca diseñar e implementar una solución para el problema que se
presenta a al hora de analizar dichas estructuras, también se busca facilitar este
proceso para los ingenieros a cargo del mantenimiento de estas aeronaves.
El proyecto busca, recolectar y crear una base de datos de las fuerzas o cargas
que se ejercen sobre los planos en pleno vuelo, de allí los ingenieros o técnicos
aeronáuticos a cargo, dictarán una política de mantenimiento y/o tomarán medidas
preventivas para que estas aeronaves que están al servicio de nuestra comunidad,
puedan seguir operando.

18
TÍTULO
Diseño y construcción de un sistema de adquisición de datos para el análisis
estructural del avión con matricula 1008 de la Fuerza Aérea Colombiana.
19
INTRODUCCIÓN
Ya que el mundo en el que estamos viviendo crece tecnológicamente a pasos
gigantescos, nuestros conocimientos y nuestras herramientas de trabajo no
pueden quedarse atrás, por eso se ha decidido incursionar en el campo de el
procesamiento de señales, porque cada día la electrónica análoga a pesar de ser
el pilar de lo que ahora conocemos ha ido quedado rezagada frente a la
electrónica digital.
En este caso los sistemas de adquisición de datos (SAD) nos permite interactuar
con las diferentes herramientas informáticas y a si mismo manipular a nuestro
antojo las señales que cotidianamente podemos encontrar en nuestro medio.
El presente proyecto tiene vital importancia para la FAC dado que en este
momento ellos no cuentan con un dispositivo que les permita ver o visualizar los
esfuerzos estructurales que sufren los planos del avión c-130.
Por medio de un sistema de adquisición de datos el cual es el objetivo de esta
investigación, lo que se quiere es brindar una herramienta más a los técnicos de la
FAC e ingenieros aeronáuticos para el análisis de los esfuerzos estructurales y de
esta manera realizar un mantenimiento optimo a la flota c-130.
Esta herramienta que se quiere prestar pude ser usada en diferentes estructuras
claro esta que se deben hacer unas adecuaciones al sistema.

20
1. PLANTEAMIENTO DEL PROBLEMA. 1.1 DESCRIPCIÓN DEL PROBLEMA.
INTEGRIDAD ESTRUCTURAL DE LOS AVIONES DE TRANSPORTE
En abril de 1988, un aeroplano Boeing 737-200 (high-time) de las líneas aéreas de
Aloha, sufre una desintegración parcial en la cual una sección de la corona del
fuselaje se rompió en dos mientras volaba. Las investigaciones subsecuentes
hechas por la Junta Nacional de la Seguridad del Transporte (NTSB) y la
Administración Federal de Aviación (FAA), revelaron la presencia simultánea de
pequeñas grietas en múltiples zonas remachadas de la junta, que eran de
suficiente tamaño y susceptibles a contribuir en este catastrófico acontecimiento.
Este fenómeno, designado como Daño Extendido por Fatiga (WFD), incrementó
las preocupaciones acerca de la integridad estructural de las aeronaves “viejas”
debido a sus altos tiempos en servicio y a sus altas frecuencias.1
Como ya existen sistemas de adquisición de datos para este tipo de problemas en
el mundo, pero con un costo muy elevado ya que estos hay que importarlos, lo
que se quiere es diseñar y construir un sistema de adquisición de datos para
esfuerzos estructurales con un funcionamiento óptimo y de menor costo.
1.1.1 FORMULACIÓN DEL PROBLEMA
¿Cómo obtener mediciones de las múltiples fuerzas que actúan sobre la estructura
del avión C-130 Hércules de la FAC y manipular estas mediciones, por medio de
sistemas electrónicos, con el fin de monitorear su integridad?
1 Escrito por: Natalia Blanco Cardona y Marta Romero Albarracín.

21
1.2 JUSTIFICACIÓN Dada la preocupación mundial por el envejecimiento de las aeronaves y sin
desconocer que las empresas aeronáuticas en Colombia, en este caso la FAC
tienen un método para el mantenimiento, basado en bolletin services y manuales
expedidos por la compañía fabricante de las aeronaves, los cuales están dados
sólo para casos ideales y no obstante que los aviones de la FAC tienen un uso por
encima de lo normal, lo que lleva a un mayor desgaste y por consiguiente una vida
útil menor, a pesar que estos procedimientos han dado resultados, es necesario
complementarlos con un sistema que pueda medir los esfuerzos que inciden en
las estructuras y así detectar a tiempo posibles fisuras por fatiga.
Este proyecto se enfoca en la aplicación de la ingeniería electrónica y de esta
manera se brinda una herramienta en este caso un sistema de adquisición de
datos (SAD), para ser aplicado en los planos del avión, donde éste sufre la mayor
tensión en el momento de un vuelo, para así mantener actualizada la flota
existente, cuya vida en servicio supera los 30 años.
1.3 OBJETIVOS
1.3.1 OBJETIVO GENERAL
Diseñar y caracterizar un Sistema de medida y Adquisición de Datos (SAD) para
sensores de deformación.

22
1.3.2 OBJETIVOS ESPECÍFICOS
• Diseñar y construir un Módulo de adquisición de datos multifuncional, para
sensores de deformación (strain gages).
• Elaborar un manual del dispositivo a fabricar.
• Crear una base de datos de la deformación presentada por las estructuras
de los aviones C-130 de la FAC.
1.4 ALCANCES Y LIMITACIONES DEL PROYECTO
1.4.1 ALCANCES El diseño y caracterización de un Sistema de medida y Adquisición de Datos
(SAD), así mismo se analiza la conversión de las distintas variables físicas que
aparecen en el esfuerzo estructural de un avión en vuelo en variables eléctricas
que puedan ser entrada de controladores electrónicos.
Por otra parte si la FAC asume la compra de las galgas, éstas serán instaladas en
el Avión de prueba y los datos serán remitidos en forma de base de datos y
reportes generados por el software, a las estudiantes de Ing. Aeronáutica Martha
Isabel Romero Albarracín y Natalia Carolina Blanco Cardona, terminando así la
fase electrónica del proyecto.
El proyecto busca aportar a la FAC tanto el aspecto tecnológico como en el
económico. En el mercado existen equipos con características similares, los
cuales se podrían adaptar a las necesidades que en este momento se desean
suplir, pero dichos equipos son sumamente costosos y la FAC no estaría

23
dispuesta a costearlos. En el ámbito tecnológico ayudaría a mantener vigente la
vida útil del avión, ya que sería una herramienta de gran ayuda para realizar y
prever futuras reparaciones y mantenimientos.
Para la Universidad representa un proyecto innovador por cuanto se profundiza
en un campo que no se había contemplado y se convierte en una oportunidad
para otras generaciones.
1.4.2 LIMITACIONES
Debido a la escasez de algunos componentes electrónicos en nuestro país, se
deberá buscar los medios para importarlos.
El proyecto se basará principalmente para la parte electrónica en el diseño del
hardware y software para la adquisición de los datos de los esfuerzos estructurales
del avión con matricula 1008 de la FAC, si por algún motivo las galgas no son
adquiridas por la FAC, o el avión no se encuentra disponible para las posibles
pruebas, este trabajo incluirá solamente el diseño y construcción de los módulos
DAQ.

24
2. MARCO DE REFERENCIA
2.1 MARCO CONCEPTUAL
2.1.1 El sistema de adquisición de datos
Un sistema de adquisición de datos es un equipo que permite tomar señales
físicas del entorno y convertirlas en datos que posteriormente se procesan y
presentan. A veces el sistema de adquisición es parte de un sistema de control, y
por tanto la información recibida se procesa para obtener una serie de señales de
control.2
Estructura de un sistema de adquisición de datos. En este diagrama se pueden
observar los bloques que componen nuestro sistema de adquisición de datos:
Figura 1. Esquema de bloques de un SAD
Fuente: Nociones básicas sobre adquisición de señales. Pág. 2
2 Nociones básicas sobre adquisición de señales. Juan Antonio Rubia Mena
25
Como vemos, los bloques principales son estos:
o El transductor
o El acondicionamiento de señal
o El convertidor analógico-digital
o La etapa de salida (interfaz con la lógica)
El transductor es un elemento que convierte la magnitud física que se va a medir
en una señal de salida (normalmente tensión o corriente) que puede ser
procesada por el sistema. Salvo que la señal de entrada sea eléctrica, se puede
decir que el transductor es un elemento que convierte energía de un tipo en otro.
Por tanto, el transductor debe tomar poca energía del sistema bajo observación,
para no alterar la medida.
El acondicionamiento de señal es la etapa encargada de filtrar y adaptar la señal
proveniente del transductor a la entrada del convertidor analógico / digital. Esta
adaptación suele ser doble y se encarga de:
Adaptar el rango de salida del transductor al rango de entrada
del convertidor. (Normalmente en tensión).
Acoplar la impedancia de salida de uno con la impedancia de
entrada del otro.
La adaptación entre los rangos de salida del convertidor y el de entrada del
convertidor tiene como objetivo el aprovechar el margen dinámico del convertidor,
de modo que la máxima señal de entrada debe coincidir con la máxima que el
26
convertidor (pero no con la máxima tensión admisible, ya que para ésta entran en
funcionamiento las redes de protección que el convertidor lleva integrada).
Por otro lado, la adaptación de impedancias es imprescindible ya que los
transductores presentan una salida de alta impedancia, que normalmente no
puede excitar la entrada de un convertidor, cuya impedancia típica suele estar
entre 1 y 10 k.
El convertidor Analógico / Digital es un sistema que presenta en su salida una
señal digital a partir de una señal analógica de entrada, (normalmente de tensión)
realizando las funciones de cuantificación y codificación.
La cuantificación implica la división del rango continuo de entrada en una serie de
pasos, de modo que para infinitos valores de la entrada la salida sólo puede
presentar una serie determinada de valores. Por tanto la cuantificación implica una
pérdida de información que no podemos olvidar.
La codificación es el paso por el cual la señal digital se ofrece según un
determinado código binario, de modo que las etapas posteriores al convertidor
puedan leer estos datos adecuadamente. Este paso hay que tenerlo siempre en
cuenta, ya que puede hacer que obtengamos datos erróneos, sobre todo cuando
el sistema admite señales positivas y negativas con respecto a masa, momento en
el cual la salida binaria del convertidor nos da tanto la magnitud como el signo de
la tensión que ha sido medida.
La etapa de salida es el conjunto de elementos que permiten conectar el SAD con
el resto del equipo, y puede ser desde una serie de buffers digitales incluidos en el
circuito convertidor, hasta un interfaz RS 232, RS 485 o Ethernet para conectar a

27
un PC o estación de trabajo, en el caso de sistemas de adquisición de datos
comerciales.
2.1.1.1 Transductor
Galgas extensiométricos (strain gage o gauge) es un sensor de deformación que
tiene como principio físico. Efecto piezorresistivo, se basan en la variación de
resistencia de un conductor o un semiconductor cuando es sometido a un esfuerzo
mecánico.
Una galga de extensión se construye sobre un metal de coeficiente de elasticidad
dado, adosándole un alambre, una tira semiconductora o pistas conductoras. Al
deformarse el soporte de la galga, se "estira" o se "comprime" el sensor, variando
así su resistencia. El cambio de resistencia será, precisamente, el reflejo de la
deformación sufrida. En términos de su caracterización, dada la resistencia R sin
deformación, la aplicación de una fuerza F deformante producirá un cambio de
resistencia, D R, cuya medición permite calcular la fuerza mediante:
Donde se ha definido una constante "G", conocida como la constante de la galga y
que suele variar entre 2 y 2,2 para galgas de soporte metálico.
2.1.1.2 La etapa de acondicionamiento de la señal
Con más detalle, en una etapa de acondicionamiento se puede encontrar estas
etapas, aunque no todas están siempre presentes:
Amplificación

28
Excitación
Filtrado
Multiplexado
Aislamiento
Linealización
2.1.1.2.1 Amplificación Es el tipo más común de acondicionamiento. Para
conseguir la mayor precisión posible la señal de entrada deber ser amplificada de
modo que su máximo nivel coincida con la máxima tensión que el convertidor
pueda leer.
2.1.1.2.2 Aislamiento - Otra aplicación habitual en acondicionamiento de la señal
es el aislamiento eléctrico entre el transductor y el ordenador, para proteger al
mismo de transitorios de alta tensión que puedan dañarlo. Un motivo adicional
para usar aislamiento es el garantizar que las lecturas del convertidor no son
afectadas por diferencias en el potencial de masa o por tensiones en modo
común.
Cuando el sistema de adquisición y la señal a medir están ambas referidas a masa
pueden aparecer problemas si hay una diferencia de potencial entre ambas
masas, apareciendo un "bucle de masa", que puede devolver resultados erróneos.
2.1.1.2.3 Multiplexado - El multiplexado es la conmutación de las entradas del
convertidor, de modo que con un sólo convertidor podemos medir los datos de
diferentes canales de entrada. Puesto que el mismo convertidor está midiendo
diferentes canales, su frecuencia máxima de conversión será la original dividida
por el número de canales muestreados.

29
2.1.1.2.4 Filtrado - El fin del filtro es eliminar las señales no deseadas de la señal
que se está observando. Por ejemplo, en las señales cuasi-continuas, (como la
temperatura) se usa un filtro de ruido de unos 4 Hz, que eliminará interferencias,
incluidos los 50/60 Hz de la red eléctrica.
Las señales alternas, tales como la vibración, necesitan un tipo distinto de filtro,
conocido como filtro antialiasing, que es un filtro pasabajo pero con un corte muy
brusco, que elimina totalmente las señales de mayor frecuencia que la máxima a
medir, ya que se si no eliminan aparecen superpuestas a la señal medida, con el
consiguiente error.
2.1.1.2.5 Linealización - Muchos transductores, como los termopares, presentan
una respuesta no lineal ante cambios lineales en los parámetros que están siendo
medidos. Aunque la linealización puede realizarse mediante métodos numéricos
en el sistema de adquisición de datos, suele ser una buena idea el hacer esta
corrección mediante circuitería externa.
2.1.1.2.6 Excitación - La etapa de acondicionamiento de señal a veces genera
excitación para algunos transductores, como por ejemplos las galgas
extesiométricas, termistores o RTD, que necesitan de la misma, bien por su
constitución interna, (como el termistor, que es una resistencia variable con la
temperatura) o bien por la configuración en que se conectan (como el caso de las
galgas, que se suelen montar en un puente de Wheatstone). El puente de
Wheatstone es el circuito fundamental para medir esfuerzos.

30
2.1.1.3 Puente de medida con dos galgas (Medio Puente): Figura 2. Puente de Wheastone.
Debido a la utilización de dos galgas se consigue duplicar la sensibilidad del
puente. Esto permite que para una misma deformación se tenga una mayor señal
de salida para una tensión de alimentación dada. La disposición de las galgas,
permiten la compensación en temperatura.
2.1.2 Controlador y microcontrolador.
Recibe el nombre de controlador el dispositivo que se emplea para el gobierno de
uno o varios procesos.
Aunque el concepto de controlador ha permanecido invariable a través del tiempo,
su implementación física ha variado frecuentemente. Hace tres décadas, los
controladores se construían exclusivamente con componentes de lógica discreta,
posteriormente se emplearon los microprocesadores, que se rodeaban con chips
de memoria y E/S sobre una tarjeta de circuito impreso. En la actualidad, todos los
31
elementos del controlador se han podido incluir en un chip, el cual recibe el
nombre de microcontrolador.
Realmente consiste en un sencillo pero completo computador contenido en el
corazón (chip) de un circuito integrado.
Un microcontrolador es un circuito integrado de alta escala de integración que in-
corpora la mayor parte de los elementos que configuran un controlador.
Un microcontrolador dispone normalmente de los siguientes componentes:
• Procesador o CPU.
• Memoria RAM para Contener los datos.
• Memoria para el programa tipo ROM/PROM/EPROM.
• Líneas de E/S para comunicarse con el exterior.
• Diversos módulos para el control de periféricos (temporizadores, Puertas
Serie y Paralelo, CAD: Conversores Analógico/Digital, CDA: Conversores
Digital/Analógico, etc.).
Generador de impulsos de reloj que sincronizan el funcionamiento de todo el
sistema.
Los productos que para su regulación incorporan un microcontrolador disponen de
las siguientes ventajas:
1. Aumento de prestaciones: un mayor control sobre un determinado
elemento representa una mejora considerable en el mismo.

32
2. Aumento de la fiabilidad: al reemplazar el microcontrolador por un
elevado número de elementos disminuye el riesgo de averías y se precisan
menos ajustes.
3. Reducción del tamaño en el producto acabado: La integración del
microcontrolador en un chip disminuye el volumen, la mano de obra y los
stocks.
4. Mayor flexibilidad: las características de control están programadas por lo
que su modificación sólo necesita cambios en el programa de instrucciones.
El microcontrolador es en definitiva un circuito integrado que incluye todos los
componentes de un computador. Debido a su reducido tamaño es posible montar
el controlador en el propio dispositivo al que gobierna. En este caso el controlador
recibe el nombre de controlador empotrado.
2.1.2.1 Conversor A/D (CAD)
Los microcontroladores que incorporan un Conversor A/D (Analógico/Digital)
pueden procesar señales analógicas, tan abundantes en las aplicaciones. Suelen
disponer de un multiplexor que permite aplicar a la entrada del CAD diversas
señales analógicas desde los pines del circuito integrado.
2.1.2.2 Conversor D/A (CDA)
Transforma los datos digitales obtenidos del procesamiento del computador en su
correspondiente señal analógica que saca al exterior por una de los pines del
circuito integrado. Existen muchos efectores que trabajan con señales analógicas.
33
2.1.3 El bus serie I2C Este es un tipo de bus serie que utiliza sólo dos hilos trenzados y una masa
común para la interconexión de los distintos periféricos. La velocidad máxima a la
que se puede transmitir con este bus es de 100 Khz. (actualmente se está
implantando la frecuencia de 400 Khz.). Con el mismo circuito (dos hilos) se puede
llegar a controlar hasta 128 dispositivos. La principal utilidad es la de
comunicación entre periféricos cuando la distancia no es muy grande.
2.2 MARCO LEGAL O NORMATIVO
El Proyecto se rige por la normatividad de la FEDERAL AVIATION
ADMINISTRATION (FAA), la referencia de las normas, se encuentra en: anexo1.
2.3 MARCO TEÓRICO
2.3.1 Elección de un sensor Para realizar una buena elección del sensor a utilizar se deben tener en cuenta los
siguientes aspectos:
• Magnitud a medir
• Resolución
• Exactitud deseada
• Estabilidad
• Tiempo de respuesta
34
• Ancho de banda
• Margen de medida
2.3.1.1Características de salidas:
• Sensibilidad
• Tipo: tensión, corriente, frecuencia
• Forma de señal: unipolar, flotante, diferencial
• Impedancia
• Destino: presentación analógica
Conversión digital
Tele medida ¿tipo?
2.3.1.2 Características de alimentación:
• Tensión
• Corriente
• Potencia disponible
• Frecuencia (si alterna)
• Estabilidad
2.3.1.2 Características ambientales:
• Margen de temperatura
• Humedad
• Vibraciones
• Agentes químicos
• Entorno electromagnético
2.3.1.3 Otros factores:

35
• Peso
• Dimensiones
• Vida media
• Coste de adquisición
• Disponibilidad
• Tiempo de instalación
• Longitud de cable necesaria
• Tipo de conector
• Coste de verificación
• Coste de mantenimiento
• Coste de sustitución
• Situación en caso de fallo
2.3.2Características estáticas
En la mayor parte de los sistemas de medida, la variable de interés varía tan
lentamente que basta conocer las características estáticas de los sensores.
También se aplican a todo instrumento de medida.
2.3.2.1 Exactitud: (Accuracy): Grado en que la indicación de un instrumento
se aproxima al valor verdadero de la magnitud medida. También se le llama
precisión.
2.3.2.2 Precisión. 2.3.2.2.1 Valor exacto o verdadero: El que se obtiene por un método en el que
los expertos coinciden como que es suficientemente exacto para el fin perseguido.

36
La exactitud de un sensor se determina mediante calibración estática, esto es,
variando lentamente la entrada y tomando valores: curva de calibración. Para
conocer la magnitud de entrada hace falta un patrón de referencia. Su valor debe
conocerse con una exactitud al menos diez veces mayor que la del sensor que se
calibra
2.3.2.2.2 Error: discrepancia entre la indicación del instrumento y el verdadero
valor de la magnitud medida.
2.3.2.2.2.1 Error absoluto: resultado de medir – valor verdadero.
2.3.2.2.2.2 Error relativo: cociente entre el error absoluto y el valor verdadero.
Se expresa como:
• % de la lectura,
• % del fondo de escala o un nº de “cuentas” en el caso de instrumentos
digitales.
2.3.2.2.3 Índice de clase: Todos los sensores de una misma clase tienen un error
en la medida dentro de su alcance nominal y en condiciones establecidas, que no
supera un valor concreto, denominado índice de clase. Este es el error de medida
porcentual, referido a un valor convencional que es la amplitud del margen de
medida o el valor superior de dicho alcance. Así, un sensor de posición de clase
0,2 y un alcance de 10 mm, en las condiciones ambientales de referencia, tiene un
error inferior a: 0.2% de 10 mm, ésto es 0.02 mm o 20 µm al medir cualquier
posición dentro del alcance.
2.3.2.2.4 Compatibilidad entre resultado y error: El resultado numérico no debe
tener mas cifras de las que se pueden considerar válidas en función de la
37
incertidumbre sobre el resultado. Así, al medir T ambiente, un resultado de la
forma 20ºC±1ºC es correcto. Sin embargo no lo son, 20ºC±0.1ºC; 20.5ºC±1ºC;
20.5ºC±10%.
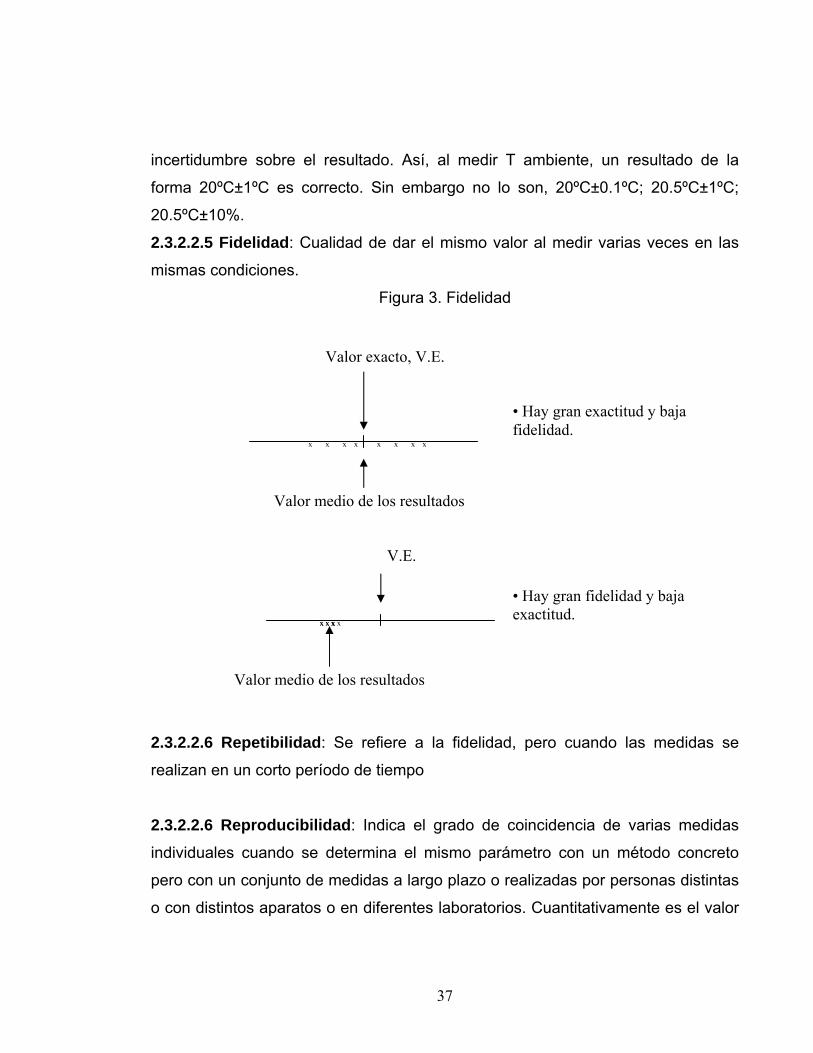
2.3.2.2.5 Fidelidad: Cualidad de dar el mismo valor al medir varias veces en las
mismas condiciones.
Figura 3. Fidelidad
2.3.2.2.6 Repetibilidad: Se refiere a la fidelidad, pero cuando las medidas se
realizan en un corto período de tiempo
2.3.2.2.6 Reproducibilidad: Indica el grado de coincidencia de varias medidas
individuales cuando se determina el mismo parámetro con un método concreto
pero con un conjunto de medidas a largo plazo o realizadas por personas distintas
o con distintos aparatos o en diferentes laboratorios. Cuantitativamente es el valor
x x x x x x x x
Valor exacto, V.E.
Valor medio de los resultados
• Hay gran exactitud y baja fidelidad.
x x x x x x x x
V.E.
Valor medio de los resultados
• Hay gran fidelidad y baja exactitud.

38
por debajo del cual se encuentra el valor absoluto de la diferencia entre dos
valores individuales con una probabilidad especificada. Se suele tomar el 95%.
2.3.2.2.7 Derivas: cuando los sensores dan una variación de la salida con el
tiempo. Se considera la deriva de cero, que da una variación de la salida con
entrada nula y deriva del factor de escala, que expresa la variación de la
sensibilidad
2.3.2.2.8 Resolución: Es el menor cambio en la magnitud de entrada que se
puede detectar a la salida.
2.3.2.3 Determinación del error en lectura en equipos de medidas: la mayoría
de los equipos de medidas e instrumentos de laboratorio, están acompañados de
manuales que vienen en inglés. A veces no resulta fácil entender los términos y
aplicarlos a la determinación del error de una lectura concreta.
Algunos errores de medidas los provoca el propio instrumento. Estos errores
deberían ser facilitados por el fabricante bajo las condiciones indicadas en la
especificación.
Para especificar el error en la instrumentación se necesitan siempre dos
componentes:
• Una porción del valor medido (error en ganancia, debido a la amplificación).
• Un valor de offset (error de cero) especificado como porción del rango
completo; esta componente es crítica cuando se mide en la parte baja del
rango.

39
2.3.3 Introducción al sensor de deformaciones
El sensor de deformaciones es un alambre conductor cuya resistencia cambia
ligeramente al acortarlo o alargarlo. El cambio de su longitud es pequeño, en
cuantas millonésimas de pulgada. El sensor está integrado a una estructura, de
modo que los porcentajes de cambio de longitud del sensor de deformación y de la
estructura son idénticos.
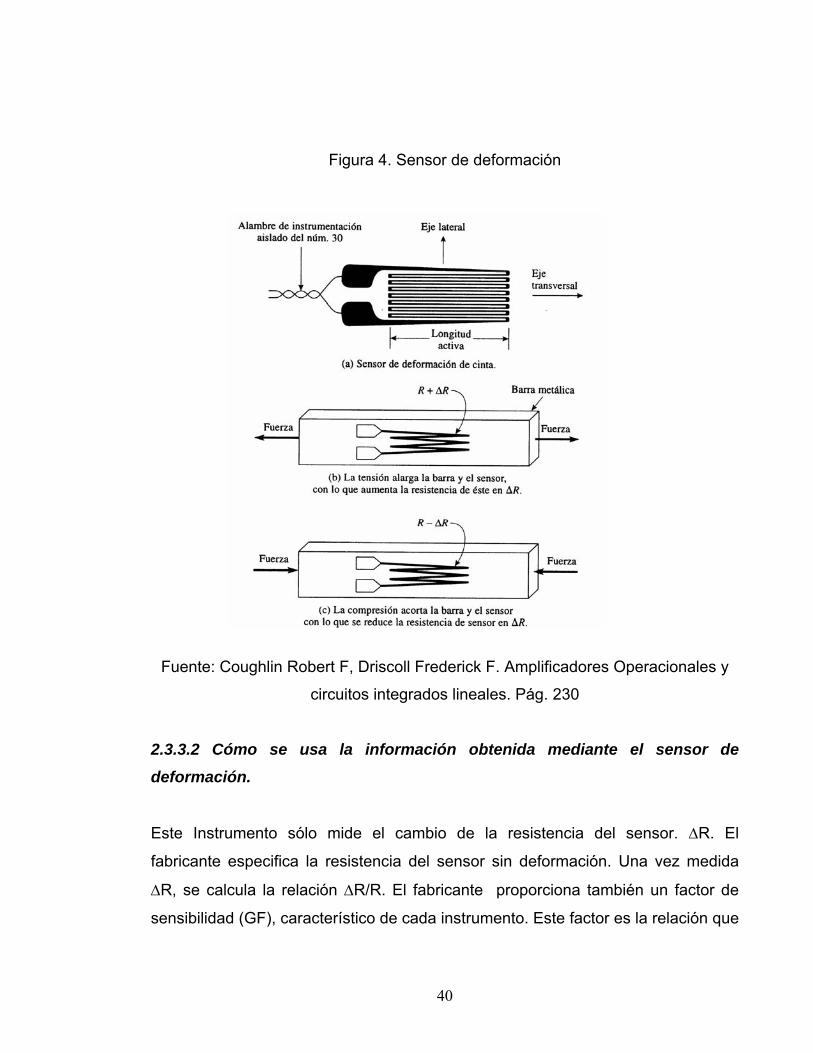
En la figura (4a) se puede apreciar un sensor de deformación de tipo cinta
metálica. La longitud activa del sensor está situada a lo largo del eje transversal.
Hay que montar el sensor de manera que el eje transversal coincida con el
movimiento de la estructura que se a va a medir figura (4b y 4c). Cuando por
causa de una tensión se alarga la barra y el conductor del sensor, también
aumenta la resistencia de ésta. Una compresión disminuye la resistencia del
sensor, al disminuir la longitud normal del sensor de esfuerzo.3
2.3.3.1 Material utilizado en el sensor de deformación
Los sensores de deformación se construyen utilizando aleaciones metálicas como
el Constantan, el Nicromo V, Dynaloy, Stabiloy o aleaciones de platino. Para el
trabajo a altas temperaturas se utiliza el alambre. Para temperaturas moderadas,
los sensores de deformación se construyen con aleaciones de metales en cintas
muy delgadas mediante un procedimiento de fotograbado. Se consigue así un
producto denominado sensor de deformación tipo cinta, el cual se puede ver en la
gráfica (4a).
3 Amplificadores Operacionales, Robert F. Coughlin – Frederick F. Driscoll
40
Figura 4. Sensor de deformación
Fuente: Coughlin Robert F, Driscoll Frederick F. Amplificadores Operacionales y
circuitos integrados lineales. Pág. 230
2.3.3.2 Cómo se usa la información obtenida mediante el sensor de
deformación.
Este Instrumento sólo mide el cambio de la resistencia del sensor. ∆R. El
fabricante especifica la resistencia del sensor sin deformación. Una vez medida
∆R, se calcula la relación ∆R/R. El fabricante proporciona también un factor de
sensibilidad (GF), característico de cada instrumento. Este factor es la relación que

41
existe entre el cambio porcentual en la resistencia de un sensor y su
correspondiente cambio porcentual en longitud. Estos cambio porcentuales
también se pueden expresar en forma decimal. Si se divide la relación ∆R/R entre
el factor de sensibilidad, G, se obtiene la razón de cambio de la longitud del sensor
∆L respecto de su longitud original L. Desde luego que la estructura en la que está
montando el sensor tiene el mismo ∆L/L
A la relación ∆L/L se denomina deformación unitaria. La información relativa a ésta
(deducida mediante la medición de ∆R) es lo que nos interesa en este momento
para el análisis de las vigas. Estos datos y características conocidas del material
estructural sirven para determinar el esfuerzo ejercido en la viga.
El esfuerzo es la cantidad de fuerza ejercida sobre un área unitaria. La unidad del
esfuerzo es libra por pulgada cuadrada(psi). La fatiga, o esfuerzo de deformación,
es la deformación de un material causada por un esfuerzo, o ∆L/L
2.3.3.3 Montaje de los sensores de deformación
Antes de montar un sensor de deformación, hay que limpiar, lijar y enjuagar con
alcohol, o metíl etíl cetona la superficie de la viga de montaje. Se pega
permanentemente el sensor a la superficie limpia mediante un adhesivo como
Eastman 910, adhesivo epóxico o de polimida o cemento para cerámica.
2.3.3.4 MEDICIÓN DE PEQUEÑOS CAMBIOS EN LA RESISTENCIA
Si lo que hay que medir es un cambio ligero en la resistencia, lo que se obtendrá
será un cambio muy pequeño en el voltaje. Por lo tanto, es necesario un circuito
que permita amplificar solo la diferencia en voltaje a través del sensor de

42
deformación causado por un cambio en su resistencia. La solución a lo anterior
está en el circuito conocido como puente de Wheastone.
2.3.3.4.1 Puente Básico de Resistencias.
El sensor de deformación se coloca en el brazo del puente de resistencias, como
lo podemos observar en la figura (5). Suponga que el sensor no está deformado,
de modo que su resistencia es igual a R, suponiendo que R1, R2 y R3 son todas
iguales a R, en estas condiciones E1=E2=E/2 Y E1-E2=0, podremos decir que el
puente está balanceado. Cuando el sensor de esfuerzo se encuentra comprimido,
entonces R decrecerá en ∆R y el voltaje diferencial E1 – E2 se calcularía
mediante
RREEE
421 ∆
×=−
Esta aproximación se considera válida dado que 2∆R<< 4R en el caso de los
sensores de esfuerzo.
Esto nos muestra que E debe ser lo suficientemente grande como para obtener e
voltaje de salida diferencial E1-E2.

43
Figura 5. Arreglo de puente de resistencias y voltaje de alimentación E
El arreglo de puente de resistencia y el voltaje de alimentación E convierte un
cambio en la resistencia en el sensor de deformación, ∆R, en un voltaje de salida
diferencial, E1- E2.
2.3.3.4.2 Efectos térmicos en el balance del puente
Aun cuando se logra balancear el circuito puente que se observa en la figura (5),
éste no permanecería así, debido a que los ligeros cambios en la temperatura en
el sensor de esfuerzo provocan cambios en resistencia iguales o mayores que los
generados por el esfuerzo. Para resolver este problema se monta otro sensor de
esfuerzo idéntico y junto al sensor que esta funcionando, de esta manera ambos
estarán dentro del mismo entorno térmico. Por lo tanto, conforme varíe la
temperatura, la resistencia del sensor adicional cambiará exactamente como lo
hace la resistencia del sensor en funcionamiento. Este sensor adicional permite
obtener una compensación de temperatura automática. Por lo que acertadamente
se le ha llamado sensor de compensación de temperatura o sensor ficticio.
44
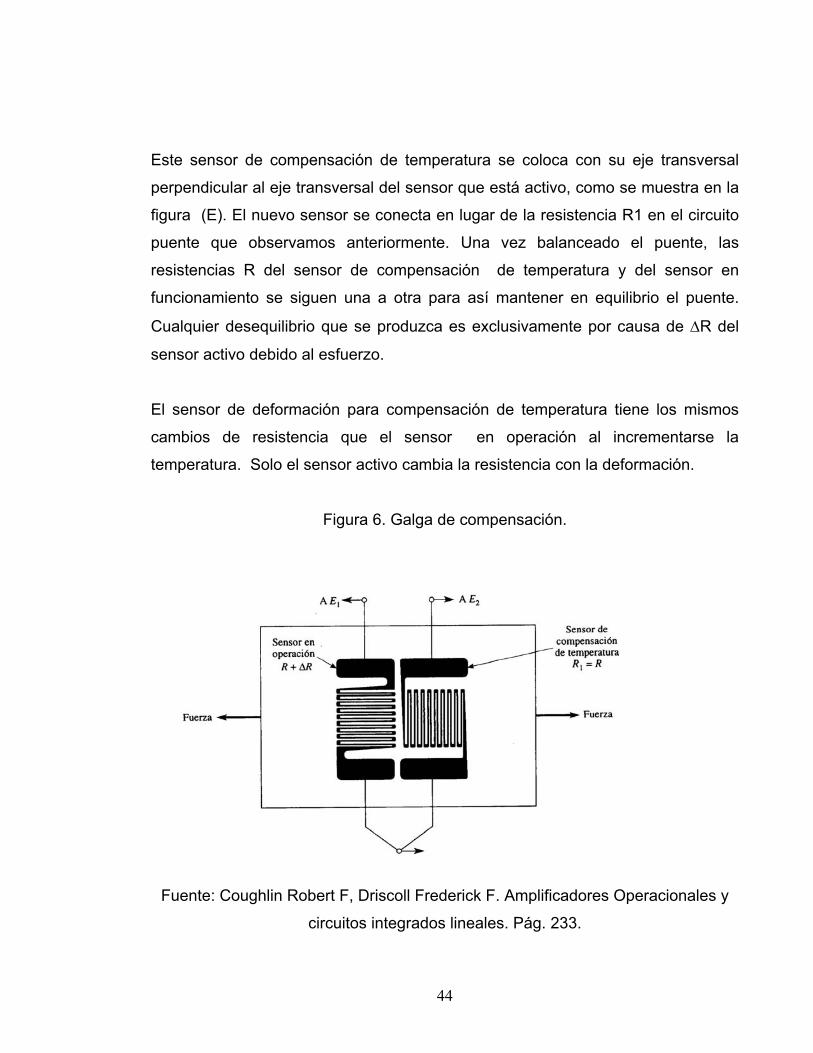
Este sensor de compensación de temperatura se coloca con su eje transversal
perpendicular al eje transversal del sensor que está activo, como se muestra en la
figura (E). El nuevo sensor se conecta en lugar de la resistencia R1 en el circuito
puente que observamos anteriormente. Una vez balanceado el puente, las
resistencias R del sensor de compensación de temperatura y del sensor en
funcionamiento se siguen una a otra para así mantener en equilibrio el puente.
Cualquier desequilibrio que se produzca es exclusivamente por causa de ∆R del
sensor activo debido al esfuerzo.
El sensor de deformación para compensación de temperatura tiene los mismos
cambios de resistencia que el sensor en operación al incrementarse la
temperatura. Solo el sensor activo cambia la resistencia con la deformación.
Figura 6. Galga de compensación.
Fuente: Coughlin Robert F, Driscoll Frederick F. Amplificadores Operacionales y
circuitos integrados lineales. Pág. 233.

45
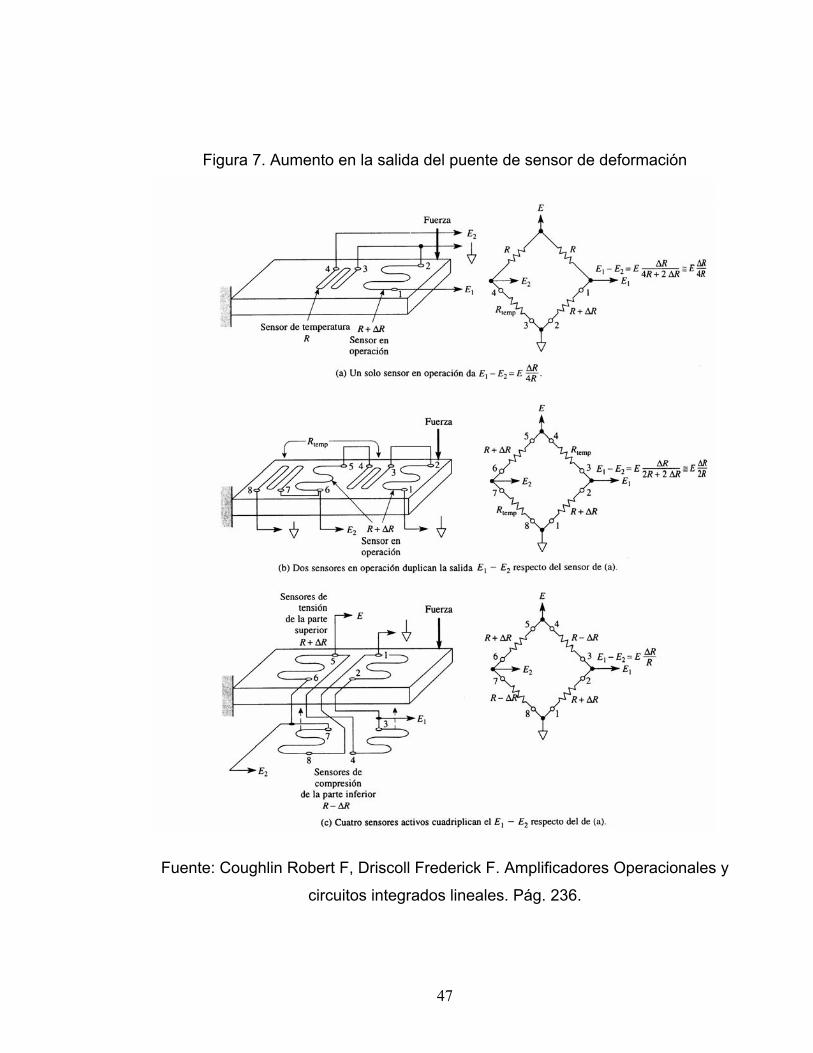
2.3.3.6 Aumento en la salida del puente de sensores de deformación
Se mostró que un solo sensor de deformación en operación y un sensor de
compensación de temperatura producen una salida en el puente diferencial igual
a:
E1-E2= E (∆R/4R)
Se muestra nuevamente la posición de los sensores en la figura (7)
El voltaje de salida del puente, E1 – E2 se duplica al duplicarse la cantidad de
sensores que están activos, como se aprecia en la figura (7b) . Los sensores 1-2 y
5-6 son los activos y su resistencia aumento si se aplica la fuerza como se indica
en la figura. Al colocar los sensores activos en ramas opuestas del puente, los
sensores de compensación de temperatura en las otras ramas, la salida del
puente es:
RR
RRREEE
2221 ∆
≈∆+
∆×=−
Si el miembro estructural experimenta una flexión como se muestra en la figura
(7c) puede obtenerse mayor sensibilidad en el puente. El lado superior de la
barra se alarga a fin de aumentar la resistencia del sensor activo en una cantidad
igual a +∆R. El extremo inferior de la barra se acorta a fin de disminuir la
resistencia del sensor activo en una cantidad igual a -∆R.
Los sensores de tensión 1-2 y 5-6 están conectados en ramas opuestas del
puente. Los sensores de compresión 3-4 y 7-8 están conectados en las ramas
opuestas restantes del puente. Los sensores también se compensan unos a
otros en cuanto a temperatura. La salida del arreglo de cuatro sensores de

46
deformación en la figura se cuadriplica con respecto a lo que obtiene con el puente
de un solo sensor y su valor es de:
RREEE ∆
×=− 21
Desde luego que cada uno de los arreglos de la figura (7) debe conectarse a un
circuito de balanceo.
47
Figura 7. Aumento en la salida del puente de sensor de deformación
Fuente: Coughlin Robert F, Driscoll Frederick F. Amplificadores Operacionales y
circuitos integrados lineales. Pág. 236.
48
2.3.4 AMPLIFICADORES DE INSTRUMENTACIÓN
2.3.4.1 INTRODUCCIÓN.
El amplificador de más utilidad en la medición, instrumentación y control es el
amplificador de instrumentación. Se construye por medio de varios amplificadores
operacionales y resistencias de precisión; gracias a ello, el circuito resulta muy
estable y útil en donde es importante la precisión. Actualmente existen varios
circuitos integrados que se venden en un solo encapsulado. Desafortunadamente,
estos resultan más caros que un solo amplificador operacional; Pero si lo que se
necesita es un buen desempeño y precisión, el uso de un amplificador de
instrumentación justificará su precio, ya que su desempeño no puede lograrse con
un amplificador operacional promedio.
Un pariente cercano del amplificador de instrumentación, de bajo costo, es el
amplificador diferencial básico. 4
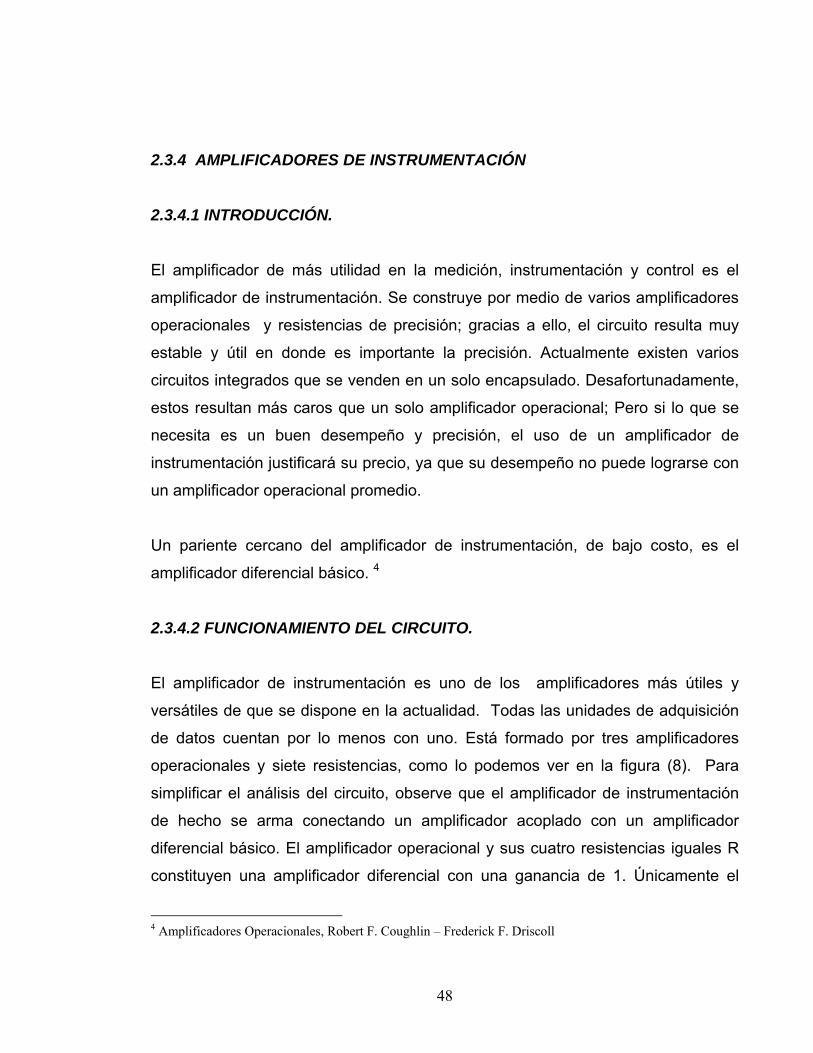
2.3.4.2 FUNCIONAMIENTO DEL CIRCUITO.
El amplificador de instrumentación es uno de los amplificadores más útiles y
versátiles de que se dispone en la actualidad. Todas las unidades de adquisición
de datos cuentan por lo menos con uno. Está formado por tres amplificadores
operacionales y siete resistencias, como lo podemos ver en la figura (8). Para
simplificar el análisis del circuito, observe que el amplificador de instrumentación
de hecho se arma conectando un amplificador acoplado con un amplificador
diferencial básico. El amplificador operacional y sus cuatro resistencias iguales R
constituyen una amplificador diferencial con una ganancia de 1. Únicamente el
4 Amplificadores Operacionales, Robert F. Coughlin – Frederick F. Driscoll

49
valor de las resistencias del amplificador, es lo que debe ser igual. La resistencia
marcada con prima, R’, es variable con objeto de balancear voltajes de modo
común que estuvieran presentes. Como se muestra en la figura (8a). Para definir
la ganancia de acuerdo con la ecuación
aEEV 21
210 +=−
Donde a=aR/R
E1 se aplica a la entrada (+) y E2 a la entrada (-). Vo es proporcional a la
diferencia entre los voltajes de entrada.
La ganancia de voltaje, desde la entrada diferencial (E1-E2) a la salida simple, se
define por medio de una sola resistencia.
La resistencia de entrada de las dos entradas es muy alta y no cambia aunque se
varíe la ganancia.
Vo no depende del voltaje común de E1 y E2 (voltaje de modo común), sólo de su
diferencia (ver figura 8)
50
Figura 8. Amplificador de instrumentación.
Fuente: Coughlin Robert F, Driscoll Frederick F. Amplificadores Operacionales y
circuitos integrados lineales. Pág. 222.
.
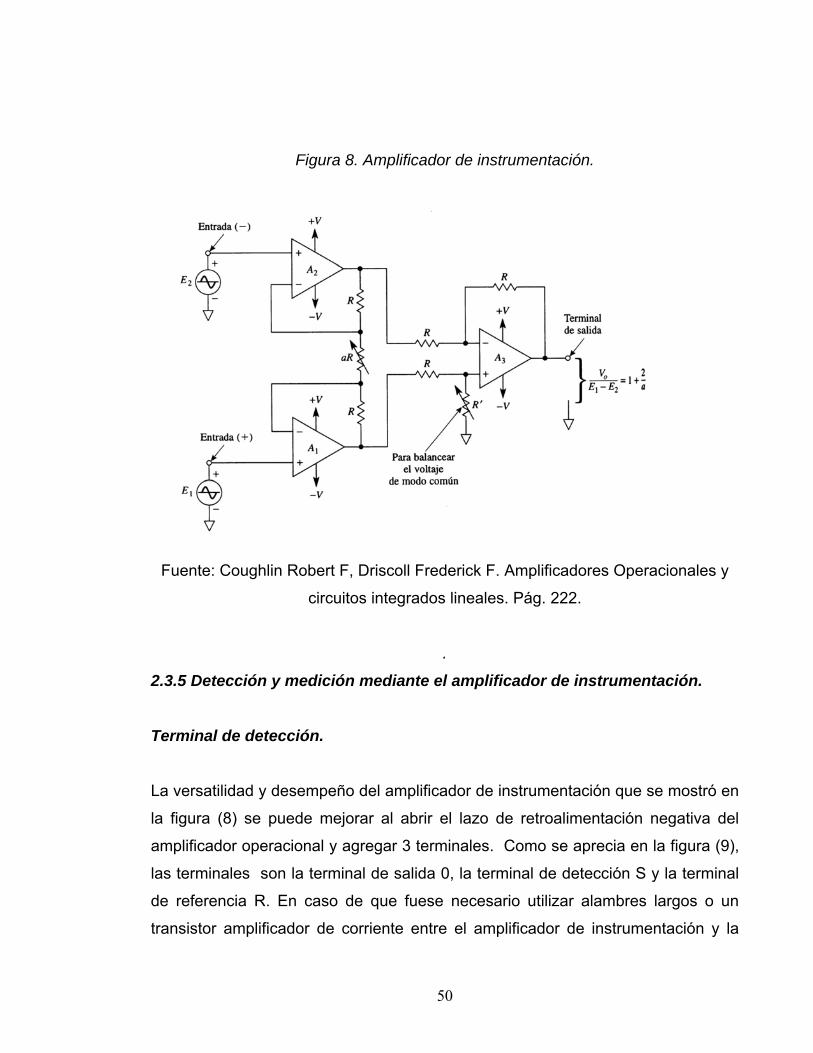
2.3.5 Detección y medición mediante el amplificador de instrumentación.
Terminal de detección.
La versatilidad y desempeño del amplificador de instrumentación que se mostró en
la figura (8) se puede mejorar al abrir el lazo de retroalimentación negativa del
amplificador operacional y agregar 3 terminales. Como se aprecia en la figura (9),
las terminales son la terminal de salida 0, la terminal de detección S y la terminal
de referencia R. En caso de que fuese necesario utilizar alambres largos o un
transistor amplificador de corriente entre el amplificador de instrumentación y la

51
carga, se producirán caídas de voltaje a través de los alambres de conexión.
Para eliminar esta caída, la terminal de detección y la de referencia se conectan
directamente a la carga. De esta manera. La resistencia del alambre se suma por
igual a las resistencias en serie con las terminales de detección y de referencia
para minimizar cualquier desigualdad. Y, todavía más importante, al detectar el
voltaje en las terminales de carga en vez de la terminal de salida del amplificador,
la retroalimentación actúa para mantener constante el voltaje en la carga. Si sólo
se utiliza el amplificador diferencial básico, el voltaje de salida se determina
mediante la ecuación:
)21(210 EEmmEmEV −=−=
Donde m=1.
Si se utiliza el amplificador de instrumentación, el voltaje de salida se calcula
mediante la ecuación
aEEV 21
210 +=−
Esta técnica también se conoce como detección remota de voltaje; es decir, se
detecta y controla el voltaje de la carga remota y no en las terminales de salida del
amplificador.
52
Figura 9. Terminales de detección
Fuente: Coughlin Robert F, Driscoll Frederick F. Amplificadores Operacionales y
circuitos integrados lineales. Pág. 225.
Al extender las terminales del sensor y de referencia hasta las terminales de
carga se logra que Vo dependa de la ganancia del amplificador y de los voltajes de
entrada y no de las corrientes en la carga o de la resistencia de carga.
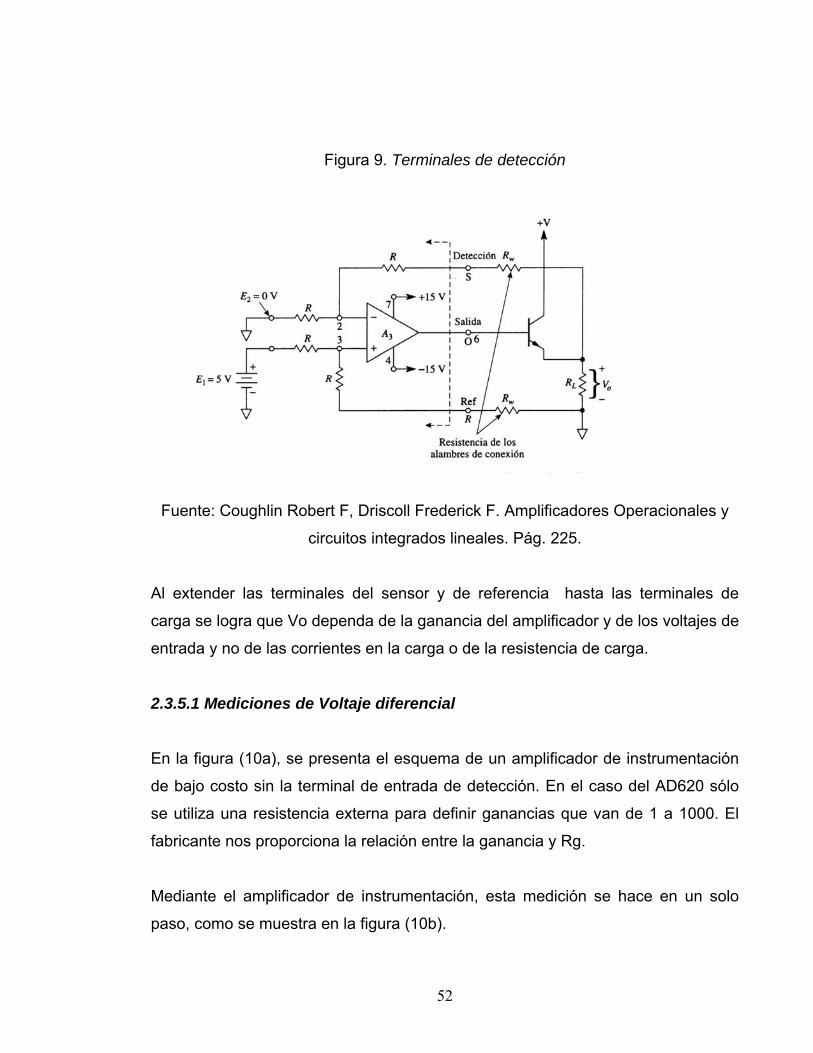
2.3.5.1 Mediciones de Voltaje diferencial
En la figura (10a), se presenta el esquema de un amplificador de instrumentación
de bajo costo sin la terminal de entrada de detección. En el caso del AD620 sólo
se utiliza una resistencia externa para definir ganancias que van de 1 a 1000. El
fabricante nos proporciona la relación entre la ganancia y Rg.
Mediante el amplificador de instrumentación, esta medición se hace en un solo
paso, como se muestra en la figura (10b).

53
Dado que:
E1= Vcolector
E2= Vemisor
Vo=(1)(E1-E2)=(1)(Vcolector-Vemisor)=Vce
Figura 10. Amplificador de instrumentación AD620
Fuente: Coughlin Robert F, Driscoll Frederick F. Amplificadores Operacionales y
circuitos integrados lineales. Pág. 226.

54
2.3.5.2 El amplificador de instrumentación como circuito acondicionador de
señal
Algunos circuitos sensores se diseñan con una salida diferencial. Sin embargo, el
voltaje de entrada de un microcontrolador está referido a tierra y por lo tanto tiene
una salida simple. Por ello, es necesario contar con un circuito acondicionador de
señal (CAS), el cual tiene una entrada diferencial y una salida simple.
2.3.6 MICROCONTROLADOR PIC
2.3.6.1 Controlador y microcontrolador.
Un microcontrolador es un circuito integrado de alta escala de integración que in-
corpora la mayor parte de los elementos que configuran un controlador.
Un microcontrolador dispone normalmente de los siguientes componentes:
Procesador o UCP (Unidad Central de Proceso).
Memoria RAM para Contener los datos.
Memoria para el programa tipo ROM/PROM/EPROM.
Líneas de E/S para comunicarse con el exterior.
Diversos módulos para el control de periféricos (temporizadores, Puertas
Serie y Paralelo, CAD: Conversores Analógico/Digital, CDA: Conversores
Digital/Analógico, etc.).
Generador de impulsos de reloj que sincronizan el funcionamiento de todo el
sistema.
Los productos que para su regulación incorporan un microcontrolador disponen de
las siguientes ventajas:

55
1. Aumento de prestaciones: un mayor control sobre un determinado elemento
representa una mejora considerable en el mismo.
2. Aumento de la fiabilidad: al reemplazar el microcontrolador por un elevado
número de elementos disminuye el riesgo de averías y se precisan menos
ajustes.
3. Reducción del tamaño en el producto acabado: La integración del
microcontrolador en un chip disminuye el volumen, la mano de obra y los
stocks.
4. Mayor flexibilidad: las características de control están programadas por lo
que su modificación sólo necesita cambios en el programa de instrucciones.
El microcontrolador es en definitiva un circuito integrado que incluye todos los
componentes de un computador. Debido a su reducido tamaño es posible montar
el controlador en el propio dispositivo al que gobierna. En este caso el controlador
recibe el nombre de controlador empotrado.
2.3.6.2 Diferencia entre microprocesador y microcontrolador.
El microprocesador es un circuito integrado que contiene la Unidad Central de
Proceso, también llamada procesador, de un computador. La CPU está formada
por la Unidad de Control, que interpreta las instrucciones, y el Camino de Datos,
que las ejecuta.
Los pines de un microprocesador sacan al exterior las líneas de sus buses de
direcciones, datos y control, para permitir conectarle con la Memoria y los Módulos
de E/S y configurar un computador implementado por varios circuitos integrados.

56
Se dice que un microprocesador es un sistema abierto porque su configuración es
variable de acuerdo con la aplicación a la que se destine.
Si sólo se dispusiese de un modelo de microcontrolador, éste debería tener muy
potenciados todos sus recursos para poderse adaptar a las exigencias de las
diferentes aplicaciones. Esta potenciación supondría en muchos casos un
despilfarro. En la práctica cada fabricante de microcontroladores oferta un elevado
número de modelos diferentes, desde los más sencillos hasta los más poderosos.
Es posible seleccionar la capacidad de las memorias, el número de líneas de E/S,
la cantidad y potencia de los elementos auxiliares, la velocidad de funcionamiento,
etc. Por todo ello, un aspecto muy destacado del diseño es la selección del
microcontrolador a utilizar.
Aplicaciones de los microcontroladores.
Cada vez existen más productos que incorporan un microcontrolador con el fin de
aumentar sustancialmente sus prestaciones, reducir su tamaño y coste, mejorar su
fiabilidad y disminuir el consumo.
Algunos fabricantes de microcontroladores superan el millón de unidades de un
modelo determinado producidas en una semana. Este dato puede dar una idea de
la masiva utilización de estos componentes.
Los microcontroladores están siendo empleados en multitud de sistemas
presentes en nuestra vida diaria, como pueden ser juguetes, horno microondas,
frigoríficos, televisores, computadoras, impresoras, módems, el sistema de
arranque de nuestro automóvil, etc. Y otras aplicaciones con las que seguramente
no estaremos tan familiarizados como instrumentación electrónica, control de

57
sistemas en una nave espacial, etc. Una aplicación típica podría emplear varios
microcontroladores para controlar pequeñas partes del sistema. Estos pequeños
controladores podrían comunicarse entre ellos y con un procesador central,
probablemente más potente, para compartir la información y coordinar sus
acciones, como, de hecho, ocurre ya habitualmente en cualquier PC.
El mercado de los microcontroladores.
Aunque en el mercado de la microinformática la mayor atención la acaparan los
desarrollos de los microprocesadores, lo cierto es que se venden cientos de
microcontroladores por cada uno de aquéllos.
Existe una gran diversidad de microcontroladores. Quizá la clasificación más
importante sea entre microcontroladores de 4, 8, 16 ó 32 bits. Aunque las
prestaciones de los microcontroladores de 16 y 32 bits son superiores a los de 4 y
8 bits, la realidad es que los microcontroladores de 8 bits dominan el mercado y
los de 4 bits se resisten a desaparecer. La razón de esta tendencia es que los
microcontroladores de 4 y 8 bits son apropiados para la gran mayoría de las
aplicaciones, lo que hace absurdo emplear micros más potentes y
consecuentemente más caros. Uno de los sectores que más tira del mercado del
microcontrolador es el mercado automovilístico. De hecho, algunas de las familias
de microcontroladores actuales se desarrollaron pensando en este sector, siendo
modificadas posteriormente para adaptarse a sistemas más genéricos. El mercado
del automóvil es además uno de los más exigentes: los componentes electrónicos
deben operar bajo condiciones extremas de vibraciones, choques, ruido, etc. y
seguir siendo fiables. El fallo de cualquier componente en un automóvil puede ser
el origen de un accidente.
58
En cuanto a las técnicas de fabricación, cabe decir que prácticamente la totalidad
de los microcontroladores actuales se fabrican con tecnología CMOS
Esta tecnología supera a las técnicas anteriores por su bajo consumo y alta
inmunidad al ruido.
La distribución de las ventas según su aplicación es la siguiente:
1. Una tercera parte se absorbe en las aplicaciones relacionadas con los
computadores y sus periféricos.
2. La cuarta parte se utiliza en las aplicaciones de consumo
(Electrodomésticos, juegos, TV, vídeo, etc.)
3. El 16% de las ventas mundiales se destinó al área de las comunicaciones.
4. Otro 16% fue empleado en aplicaciones industriales.
5. El resto de los microcontroladores vendidos en el mundo, aproximadamente
un 10% fueron adquiridos por las industrias de automoción.
También los modernos microcontroladores de 32 bits van afianzando sus
posiciones en el mercado, siendo las áreas de más interés el procesamiento de
imágenes, las comunicaciones, las aplicaciones militares, los procesos industriales
y el control de los dispositivos de almacenamiento masivo de datos.

59
2.3.6.3 ¿Qué microcontrolador emplear?
A la hora de escoger el microcontrolador a emplear en un diseño concreto hay que
tener en cuenta multitud de factores, como la documentación y herramientas de
desarrollo disponibles y su precio, la cantidad de fabricantes que lo producen y por
supuesto las características del microcontrolador (tipo de memoria de programa,
número de temporizadores, interrupciones, etc.):
2.3.6.3.1 Costes. Como es lógico, los fabricantes de microcontroladores compiten
duramente para vender sus productos. Y no les va demasiado mal ya que sin
hacer demasiado ruido venden 10 veces más microcontroladores que micro-
procesadores.
Para que nos hagamos una idea, para el fabricante que usa el microcontrolador en
su producto una diferencia de precio en el microcontrolador de algunos pesos es
importante (el consumidor deberá pagar además el coste del empaquetado, el de
los otros componentes, el diseño del hardware y el desarrollo del software). Si el
fabricante desea reducir costes debe tener en cuenta las herramientas de apoyo
con que va a contar: emuladores, simuladores, ensambladores, compiladores, etc.
Es habitual que muchos de ellos siempre se decanten por microcontroladores
pertenecientes a una única familia.
2.3.6.3.2 Aplicación. Antes de seleccionar un microcontrolador es imprescindible
analizar los requisitos de la aplicación:
1. Procesamiento de datos: puede ser necesario que el microcontrolador
realice cálculos críticos en un tiempo limitado. En ese caso debemos
asegurarnos de seleccionar un dispositivo suficientemente rápido para ello.

60
Por otro lado, habrá que tener en cuenta la precisión de los datos a manejar:
si no es suficiente con un microcontrolador de 8 bits, puede ser necesario
acudir a microcontroladores de 16 ó 32 bits, o incluso a hardware de coma
flotante. Una alternativa más barata y quizá suficiente es usar librerías para
manejar los datos de alta precisión.
2 .Entrada Salida: para determinar las necesidades de Entrada/Salida del
sistema es conveniente dibujar un diagrama de bloques del mismo, de tal
forma que sea sencillo identificar la cantidad y tipo de señales a controlar.
Una vez realizado este análisis puede ser necesario añadir periféricos
hardware externos o cambiar a otro microcontrolador más adecuado a ese
sistema.
3. Consumo: algunos productos que incorporan microcontroladores están
alimentados con baterías y su funcionamiento puede ser tan vital como activar
una alarma antirrobo. Lo más conveniente en un caso como éste puede ser
que el microcontrolador esté en estado de bajo consumo pero que despierte
ante la activación de una señal (una interrupción) y ejecute el programa
adecuado para procesarla.
4. Memoria: para detectar las necesidades de memoria de nuestra aplicación
debemos separarla en memoria volátil (RAM), memoria no volátil (ROM,
EPROM, etc.) y memoria no volátil modificable (EEPROM). Este último tipo
de memoria puede ser útil para incluir información específica de la
aplicación como un número de serie o parámetros de calibración.
El tipo de memoria a emplear vendrá determinado por el volumen de ventas
previsto del producto: de menor a mayor volumen será conveniente emplear
EPROM, OTP y ROM. En cuanto a la cantidad de memoria necesaria puede

61
ser imprescindible realizar una versión preliminar, aunque sea en seudo-
código, de la aplicación y a partir de ella hacer una estimación de cuánta
memoria volátil y no volátil es necesaria y si es conveniente disponer de
memoria no volátil modificable.
Figura 11. Memoria del microcontrolador
Fuente: Embedded Control Handbook, Microchip.
5. Ancho de palabra: el criterio de diseño debe ser seleccionar el micro-
controlador de menor ancho de palabra que satisfaga los requerimientos de la
aplicación. Usar un microcontrolador de 4 bits supondrá una reducción en los

62
costes importante, mientras que uno de 8 bits puede ser el más adecuado si
el ancho de los datos es de un byte. Los microcontroladores de 16 y 32 bits,
debido a su elevado coste, deben reservarse para aplicaciones que requieran
sus altas prestaciones (Entrada/Salida potente o espacio de direccionamiento
muy elevado).
6. Diseño de la placa: la selección de un microcontrolador concreto condi-
cionará el diseño de la placa de circuitos. Debe tenerse en cuenta que quizá
usar un microcontrolador barato encarezca el resto de componentes del
diseño.
Es preciso resaltar en este punto que existen innumerables familias de mi-
crocontroladores, cada una de las cuales posee un gran número de variantes.
2.3.6.4 Recursos comunes a todos los microcontroladores.
Al estar todos los microcontroladores integrados en un chip, su estructura
fundamental y sus características básicas son muy parecidas. Todos deben
disponer de los bloques esenciales Procesador, memoria de datos y de
instrucciones, líneas de E/S, oscilador de reloj y módulos controladores de
periféricos. Sin embargo, cada fabricante intenta enfatizar los recursos más
idóneos para las aplicaciones a las que se destinan preferentemente.
Arquitectura básica
Aunque inicialmente todos los microcontroladores adoptaron la arquitectura clásica
de Von Neumann, en el momento presente se impone la arquitectura Harvard. La
arquitectura de von Neumann se caracteriza por disponer de una sola memoria

63
principal donde se almacenan datos e instrucciones de forma indistinta. A dicha
memoria se accede a través de un sistema de buses único (direcciones, datos y
control).
La arquitectura Harvard dispone de dos memorias independientes una, que
contiene sólo instrucciones y otra, sólo datos. Ambas disponen de sus respectivos
sistemas de buses de acceso y es posible realizar operaciones de acceso (lectura
o escritura) simultáneamente en ambas memorias
Los microcontroladores PIC responden a la arquitectura Harvard.

64
Figura 12. Arquitectura del microcontrolador.

65
El procesador o CPU
Es el elemento más importante del microcontrolador y determina sus principales
características, tanto a nivel hardware como software.
Se encarga de direccionar la memoria de instrucciones, recibir el código OP de la
instrucción en curso, su decodificación y la ejecución de la operación que implica
la instrucción, así como la búsqueda de los operandos y el almacenamiento del
resultado.
Existen tres orientaciones en cuanto a la arquitectura y funcionalidad de los
procesadores actuales:
CISC: Un gran número de procesadores usados en los microcontroladores están
basados en la filosofía CISC (Computadores de Juego de Instrucciones Complejo).
Disponen de más de 80 instrucciones máquina en su repertorio, algunas de las
cuales son muy sofisticadas y potentes, requiriendo muchos ciclos para su
ejecución.
Una ventaja de los procesadores CISC es que ofrecen al programador
instrucciones complejas que actúan como macros.
RISC: Tanto la industria de los computadores comerciales como la de los
microcontroladores están decantándose hacia la filosofía RISC (Computadores de
Juego de Instrucciones Reducido). En estos procesadores el repertorio de
instrucciones máquina es muy reducido y las instrucciones son simples y,
generalmente, se ejecutan en un ciclo.

66
La sencillez y rapidez de las instrucciones permiten optimizar el hardware y el
software del procesador.
SISC: En los microcontroladores destinados a aplicaciones muy concretas, el
juego de instrucciones, además de ser reducido, es “específico”, o sea, las
instrucciones se adaptan a las necesidades de la aplicación prevista. Esta filosofía
se ha bautizado con el nombre de SISC (Computadores de Juego de Instrucciones
Específico).
Memoria
En los microcontroladores la memoria de instrucciones y datos está integrada en el
propio chip. Una parte debe ser no volátil, tipo ROM, y se destina a contener el
programa de instrucciones que gobierna la aplicación. Otra parte de memoria será
tipo RAM, volátil, y se destina a guardar las variables y los datos.
Hay dos peculiaridades que diferencian a los microcontroladores de los
computadores personales:
• No existen sistemas de almacenamiento masivo como disco duro o
disquetes.
• Como el microcontrolador sólo se destina a una tarea en la memoria ROM,
sólo hay que almacenar un único programa de trabajo.
La RAM en estos dispositivos es de poca capacidad pues sólo debe contener las
variables y los cambios de información que se produzcan en el transcurso del
programa. Por otra parte, como sólo existe un programa activo, no se requiere
guardar una copia del mismo en la RAM pues se ejecuta directamente desde la
ROM.

67
Los usuarios de computadores personales están habituados a manejar Megabytes
de memoria, pero, los diseñadores con microcontroladores trabajan con
capacidades de ROM comprendidas entre 512 bytes y 8 k bytes y de RAM
comprendidas entre 20 y 512 bytes.
Según el tipo de memoria ROM que dispongan los microcontroladores, la
aplicación y utilización de los mismos es diferente. Se describen las cinco
versiones de memoria no volátil que se pueden encontrar en los
microcontroladores del mercado.
1º. ROM con máscara Es una memoria no volátil de sólo lectura cuyo contenido se graba durante la
fabricación del chip. El elevado coste del diseño de la máscara sólo hace
aconsejable el empleo de los microcontroladores con este tipo de memoria cuando
se precisan cantidades superiores a varios miles de unidades.
2ª. OTP
El microcontrolador contiene una memoria no volátil de sólo lectura “programable
una sola vez” por el usuario. OTP (One Time Programmable). Es el usuario quien
puede escribir el programa en el chip mediante un sencillo grabador controlado por
un programa desde un PC.
La versión OTP es recomendable cuando es muy corto el ciclo de diseño del
producto, o bien, en la construcción de prototipos y series muy pequeñas.
Tanto en este tipo de memoria como en la EPROM, se suele usar la encriptación
mediante fusibles para proteger el código contenido.
3ª EPROM

68
Los microcontroladores que disponen de memoria EPROM (Erasable
Programmable Read OnIy Memory) pueden borrarse y grabarse muchas veces. La
grabación se realiza, como en el caso de los OTP, con un grabador gobernado
desde un PC. Si, posteriormente, se desea borrar el contenido, disponen de una
ventana de cristal en su superficie por la que se somete a la EPROM a rayos
ultravioleta durante varios minutos. Las cápsulas son de material cerámico y son
más caros que los microcontroladores con memoria OTP que están hechos con
material plástico.
4ª EEPROM
Se trata de memorias de sólo lectura, programables y borrables eléctricamente
EEPROM (Electrical Erasable Programmable Read OnIy Memory). Tanto la
programación como el borrado, se realizan eléctricamente desde el propio
grabador y bajo el control programado de un PC. Es muy cómoda y rápida la
operación de grabado y la de borrado. No disponen de ventana de cristal en la
superficie.
Los microcontroladores dotados de memoria EEPROM una vez instalados en el
circuito, pueden grabarse y borrarse cuantas veces se quiera sin ser retirados de
dicho circuito. Para ello se usan “grabadores en circuito” que confieren una gran
flexibilidad y rapidez a la hora de realizar modificaciones en el programa de
trabajo.
El número de veces que puede grabarse y borrarse una memoria EEPROM es
finito, por lo que no es recomendable una reprogramación continua. Son muy
idóneos para la enseñanza y la Ingeniería de diseño.

69
Se va extendiendo en los fabricantes la tendencia de incluir una pequeña zona de
memoria EEPROM en los circuitos programables para guardar y modificar
cómodamente una serie de parámetros que adecuan el dispositivo a las
condiciones del entorno.
Este tipo de memoria es relativamente lenta.
5ª FLASH Se trata de una memoria no volátil, de bajo consumo, que se puede escribir y
borrar. Funciona como una ROM y una RAM pero consume menos y es más
pequeña.
A diferencia de la ROM, la memoria FLASH es programable en el circuito. Es más
rápida y de mayor densidad que la EEPROM.
La alternativa FLASH está recomendada frente a la EEPROM cuando se precisa
gran cantidad de memoria de programa no volátil. Es más veloz y tolera más ciclos
de escritura/borrado.
Las memorias EEPROM y FLASH son muy útiles al permitir que los
microcontroladores que las incorporan puedan ser reprogramados “en circuito”, es
decir, sin tener que sacar el circuito integrado de la tarjeta. Así, un dispositivo con
este tipo de memoria incorporado al control del motor de un automóvil permite que
pueda modificarse el programa durante la rutina de mantenimiento periódico,
compensando los desgastes y otros factores tales como la compresión, la
instalación de nuevas piezas, etc. La reprogramación del microcontrolador puede
convertirse en una labor rutinaria dentro de la puesta a punto.

70
Puertas de Entrada y Salida
La principal utilidad de los pines que posee la cápsula que contiene un
microcontrolador es soportar las líneas de E/S que comunican al computador
interno con los periféricos exteriores.
Según los controladores de periféricos que posea cada modelo de
microcontrolador, las líneas de E/S se destinan a proporcionar el soporte a las
señales de entrada, salida y control.
Reloj principal
Todos los microcontroladores disponen de un circuito oscilador que genera una
onda cuadrada de alta frecuencia, que configura los impulsos de reloj usados en la
sincronización de todas las operaciones del sistema.
Generalmente, el circuito de reloj está incorporado en el microcontrolador y sólo se
necesitan unos pocos componentes exteriores para seleccionar y estabilizar la
frecuencia de trabajo. Dichos componentes suelen consistir en un cristal de cuarzo
junto a elementos pasivos o bien un resonador cerámico o una red R-C.
Aumentar la frecuencia de reloj supone disminuir el tiempo en que se ejecutan las
instrucciones pero lleva aparejado un incremento del consumo de energía.
2.3.6.5 RECURSOS ESPECIALES
Cada fabricante oferta numerosas versiones de una arquitectura básica de
microcontrolador. En algunas amplía las capacidades de las memorias, en otras
incorpora nuevos recursos, en otras reduce las prestaciones al mínimo para

71
aplicaciones muy simples, etc. La labor del diseñador es encontrar el modelo
mínimo que satisfaga todos los requerimientos de su aplicación. De esta forma,
minimizará el coste, el hardware y el software.
Los principales recursos específicos que incorporan los microcontroladores son:
• Temporizadores o “Timers”.
• Perro guardián o “Watchdog”.
• Protección ante fallo de alimentación o “Brownout”.
• Estado de reposo o de bajo consumo.
• Conversor A/D.
• Conversor D/A.
• Comparador analógico.
• Modulador de anchura de impulsos o PWM.
• Puertas de E/S digitales.
• Puertas de comunicación.
Temporizadores o “Timers”
Se emplean para controlar periodos de tiempo (temporizadores) y para llevar la
cuenta de acontecimientos que suceden en el exterior (contadores).
Para la medida de tiempos se carga un registro con el valor adecuado y a
continuación dicho valor se va incrementando o decrementando al ritmo de los
impulsos de reloj o algún múltiplo hasta que se desborde y llegue a 0, momento en
el que se produce un aviso.
72
Cuando se desean contar acontecimientos que se materializan por cambios de
nivel o flancos en alguno de los pines del microcontrolador, el mencionado registro
se va incrementando o decrementando al ritmo de dichos impulsos.
Perro guardián o “Watchdog”
Cuando el computador personal se bloquea por un fallo del software u otra causa,
se pulsa el botón del reset y se reinicializa el sistema. Pero un microcontrolador
funciona sin el control de un supervisor y de forma continuada las 24 horas del día.
El Perro guardián consiste en un temporizador que, cuando se desborda y pasa
por 0, provoca un reset automáticamente en el sistema.
Se debe diseñar el programa de trabajo que controla la tarea de forma que
refresque o inicialice al Perro guardián antes de que provoque el reset. Si falla el
programa o se bloquea, no se refrescará al Perro guardián y, al completar su
temporización, “ladrará y ladrará” hasta provocar el reset.
Protección ante fallo de alimentación o “Brownout”
Se trata de un circuito que resetea al microcontrolador cuando el voltaje de
alimentación (VDD) es inferior a un voltaje mínimo (“brownout”). Mientras el voltaje
de alimentación sea inferior al de brownout el dispositivo se mantiene reseteado,
comenzando a funcionar normalmente cuando sobrepasa dicho valor.

73
Estado de reposo ó de bajo consumo
Son abundantes las situaciones reales de trabajo en que el microcontrolador debe
esperar, sin hacer nada, a que se produzca algún acontecimiento externo que le
ponga de nuevo en funcionamiento. Para ahorrar energía, (factor clave en los
aparatos portátiles), los microcontroladores disponen de una instrucción especial
(SLEEP en los PIC), que les pasa al estado de reposo o de bajo consumo, en el
cual los requerimientos de potencia son mínimos. En dicho estado se detiene el
reloj principal y se “congelan” sus circuitos asociados, quedando sumido en un
profundo “sueño” el microcontrolador. Al activarse una interrupción ocasionada por
el acontecimiento esperado, el microcontrolador se despierta y reanuda su trabajo.
Conversor A/D (CAD)
Los microcontroladores que incorporan un Conversor A/D (Analógico/Digital)
pueden procesar señales analógicas, tan abundantes en las aplicaciones. Suelen
disponer de un multiplexor que permite aplicar a la entrada del CAD diversas
señales analógicas desde los pines del circuito integrado.
Conversor D/A (CDA)
Transforma los datos digitales obtenidos del procesamiento del computador en su
correspondiente señal analógica que saca al exterior por una de los pines de la
cápsula. Existen muchos actuadores que trabajan con señales analógicas.
Comparador analógico

74
Algunos modelos de microcontroladores disponen internamente de un
Amplificador Operacional que actúa como comparador entre una señal fija de
referencia y otra variable que se aplica por una de los pines de la cápsula. La
salida del comparador proporciona un nivel lógico 1 ó 0 según una señal sea
mayor o menor que la otra.
También hay modelos de microcontroladores con un módulo de tensión de
referencia que proporciona diversas tensiones de referencia que se pueden aplicar
en los comparadores.
Puertas de comunicación
Con objeto de dotar al microcontrolador de la posibilidad de comunicarse con otros
dispositivos externos, otros buses de microprocesadores, buses de sistemas,
buses de redes y poder adaptarlos con otros elementos bajo otras normas y
protocolos. Algunos modelos disponen de recursos que permiten directamente
esta tarea, entre los que destacan:
1. UART, adaptador de comunicación serie asíncrona.
2. USART, adaptador de comunicación serie síncrona y asíncrona
3. Puerta paralela esclava para poder conectarse con los buses de otros
microprocesadores.
4. USB (Universal Serial Bus), que es un moderno bus serie para los PC.
5. Bus I2C, que es un interfaz serie de dos hilos.

75
6. CAN (Controller Area Network), para permitir la adaptación con redes de
conexionado multiplexado.5
2.3.6.6 Herramientas para el desarrollo de aplicaciones.
Uno de los factores que más importancia tiene a la hora de seleccionar un
microcontrolador entre todos los demás es el soporte tanto software como
hardware de que dispone. Un buen conjunto de herramientas de desarrollo puede
ser decisivo en la elección, ya que pueden suponer una ayuda inestimable en el
desarrollo del proyecto.
Las principales herramientas de ayuda al desarrollo de sistemas basados en
microcontroladores son:
1. Desarrollo del software:
Ensamblador. La programación en lenguaje ensamblador puede resultar un tanto
ardua para el principiante, pero permite desarrollar programas muy eficientes, ya
que otorga al programador el dominio absoluto del sistema. Los fabricantes suelen
proporcionar el programa ensamblador de forma gratuita y en cualquier caso
siempre se puede encontrar una versión gratuita para los microcontroladores más
populares.
Compilador. La programación en un lenguaje de alto nivel (como el C) permite
disminuir el tiempo de desarrollo de un producto. No obstante, si no se programa
con cuidado, el código resultante puede ser mucho más ineficiente que el
programado en ensamblador. Las versiones más potentes suelen ser muy caras,
5 Embedded Control Handbook, Microchip

76
aunque para los microcontroladores más populares pueden encontrarse versiones
demo limitadas e incluso compiladores gratuitos.
2. Depuración: debido a que los microcontroladores van a controlar
dispositivos físicos, los desarrolladores necesitan herramientas que les
permitan comprobar el buen funcionamiento del microcontrolador cuando es
conectado al resto de circuitos.
Simulador. Son capaces de ejecutar en un PC programas realizados para el
microcontrolador. Los simuladores permiten tener un control absoluto sobre la
ejecución de un programa, siendo ideales para la depuración de los mismos. Su
gran inconveniente es que es difícil simular la entrada y salida de datos del
microcontrolador. Tampoco cuentan con los posibles ruidos en las entradas, pero,
al menos, permiten el paso físico de la implementación de un modo más seguro y
menos costoso, puesto que ahorraremos en grabaciones de chips para la prueba
in-situ.
Placas de evaluación. Se trata de pequeños sistemas con un microcontrolador ya
montado y que suelen conectarse a un PC desde el que se cargan los programas
que se ejecutan en el microcontrolador. Las placas suelen incluir visualizadores
LCD, teclados, LEDs, fácil acceso a los pines de E/S, etc. El sistema operativo de
la placa recibe el nombre de programa monitor. El programa monitor de algunas
placas de evaluación, aparte de permitir cargar programas y datos en la memoria
del microcontrolador, puede permitir en cualquier momento realizar ejecución paso
a paso, monitorizar el estado del microcontrolador o modificar los valores
almacenados los registros o en la memoria.
Emuladores en circuito. Se trata de un instrumento que se coloca entre el PC
anfitrión y el zócalo de la tarjeta de circuito impreso donde se alojará el

77
microcontrolador definitivo. El programa es ejecutado desde el PC, pero para la
tarjeta de aplicación es como si lo hiciese el mismo microcontrolador que luego irá
en el zócalo. Presenta en pantalla toda la información tal y como luego sucederá
cuando se coloque la cápsula.
2.3.6.7 Características relevantes.
Descripción de las características más representativas de los PIC:
Arquitectura.
La arquitectura del procesador sigue el modelo Harvard. En esta arquitectura, la
CPU se conecta de forma independiente y con buses distintos con la memoria de
instrucciones y con la de datos.
La arquitectura Harvard permite a la CPU acceder simultáneamente a las dos
memorias. Además, propicia numerosas ventajas al funcionamiento del sistema
como se irán describiendo.
1. Segmentación.
Se aplica la técnica de segmentación (“pipe-line”) en la ejecución de las
instrucciones.
La segmentación permite al procesador realizar al mismo tiempo la ejecución de
una instrucción y la búsqueda del código de la siguiente. De esta forma se puede
ejecutar cada instrucción en un ciclo (un ciclo de instrucción equivale a cuatro
ciclos de reloj).

78
Las instrucciones de salto ocupan dos ciclos al no conocer la dirección de la
siguiente instrucción hasta que no se haya completado la de bifurcación.
2. Formato de las instrucciones.
El formato de todas las instrucciones es de la misma longitud
Todas las instrucciones de los microcontroladores de la gama baja tienen una
longitud de 12 bits. Las de la gama media tienen 14 bits y más las de la gama alta.
Esta característica es muy ventajosa en la optimización de la memoria de
instrucciones y facilita enormemente la construcción de ensambladores y
compiladores.
3. Juego de instrucciones.
Procesador RISC (Computador de Juego de Instrucciones Reducido).
Los modelos de la gama baja disponen de un repertorio de 33 instrucciones, 35
los de la gama media y casi 60 los de la alta.
4. Todas las instrucciones son ortogonales
Cualquier instrucción puede manejar cualquier elemento de la arquitectura como
fuente o como destino.
5. Arquitectura basada en un “banco de registros”
Esto significa que todos los objetos del sistema (puertas de E/S, temporizadores,
posiciones de memoria, etc.) están implementados físicamente como registros.
79
6. Diversidad de modelos de microcontroladores con prestaciones y recursos
diferentes.
La gran variedad de modelos de microcontroladores PIC permite que el usuario
pueda seleccionar el más conveniente para su proyecto
7. Gama media. PIC16CXXX con instrucciones de 14 bits
Es la gama más variada y completa de los PIC. Abarca modelos con encapsulado
desde 18 pines hasta 68, cubriendo varias opciones que integran abundantes
periféricos. Dentro de esta gama se halla el «fabuloso PIC16X84» y sus variantes.
En esta gama sus componentes añaden nuevas prestaciones a las que poseían
los de la gama baja, haciéndoles más adecuados en las aplicaciones complejas.
Admiten interrupciones, poseen comparadores de magnitudes analógicas,
convertidores A/D, puertos serie y diversos temporizadores.
El repertorio de instrucciones es de 35, de 14 bits cada una y compatible con el de
la gama baja. Sus distintos modelos contienen todos los recursos que se precisan
en las aplicaciones de los microcontroladores de 8 bits. También dispone de
interrupciones y una Pila de 8 niveles que permite el anidamiento de subrutinas.
El temporizador TMR1 que hay en esta gama tiene un circuito oscilador que puede
trabajar asincrónicamente y que puede incrementarse aunque el microcontrolador
se halle en el modo de reposo (“sleep”), posibilitando la implementación de un reloj
en tiempo real.
Las líneas de E/S presentan una carga “pull-up” activada por software.
80
2.3.6.8 LOS REGISTROS DE LA GAMA MEDIA
2.3.6.8.1Organización de la memoria de datos
La ampliación de recursos en los PIC forzó en los catalogados como de gama
media una nueva estructura y la modificación de algunas instrucciones (partiendo,
claro está, de la gama baja). Una de las diferencias fundamentales es,
precisamente, la ampliación de memoria de registros, a los que se unieron algunos
nuevos de sistema, y la accesibilidad a parte de los mismos que antes quedaban
ocultos, como OPTION o TRIS.
De este modo se optó por dos bancos de registros de 128 posiciones cada uno, la
mayoría de los cuales son de propósito general. En el siguiente esquema, que
muestra esta organización, las direcciones con casillas blancas muestran
posiciones de registros específicos, y las grises generales. (ver tabla 1)

81
Tabla 1. Registros gama media Dirección BANCO 0 BANCO 1 Dirección
00 INDF INDF 80
01 TMR0 OPTION 81
02 PCL PCL 82
03 STATUS STATUS 83
04 FSR FSR 84
05 PORT A TRIS A 85
06 PORT B TRIS B 86
07 87
08 88
09 89
0A PCLATH PCLATH 8A
0B INTCON INTCON 8B
0C PIR1 PIE1 8C
0D 8D
0E PCON 8E
0F 8F
10 90
11 91
12 92
13 93
14 94
15 95
16 96
17 97
18 98
19 99
Dirección BANCO 0 BANCO 1 Dirección
1 A 9 A
1B 9B
1C 9C
1D 9D
1E 9E
1F CMCON VRCON 9F
.
.
.
Registros de
Propósito General
Registros de
Propósito General
.
.
.
7F FF

82
Registros específicos
El PC. Direccionamiento del programa: El PC consta de 13 bits, con lo que es
posible direccionar hasta 8K palabras, separadas en bancos de 2K. El byte de
menos peso de la dirección se guarda en el registro PCL, sito en la posición 0x02
del banco 0, mientras los 5 bits de más peso se guardan en los 5 bits de menos
peso del registro PCLATH (dirección 0x08). Puesto que las instrucciones CALL y
GOTO sólo cuentan con 11 bits, sus saltos serán relativos a la página en la que
estemos. El cambio real de página se hará cambiando los bits PCLATH.4 y
PCLATH.3.
Cuadro 1. Registro de estado.
R/W R/W R/W R R R/W R/W R/W
IRP RP1 RP0 /TO /PD Z DC C C: Acarreo en el 8º bit.
1 = acarreo en la suma y no en la resta. 0 = acarreo en la resta y no en la suma DC: Acarreo en el 4º bit de menor peso. Igual que C. Z: Zero. 1 = El resultado de alguna operación es 0. 0 = El resultado es distinto de 0 /PD: Power Down. 1 = Recién encendido o tras CLRWDT. 0 = Tras ejecutar una instrucción SLEEP /TO: Timer Out. 1 = Recién encendido, tras CLRWDT, o SLEEP. 0 = Saltó el WDT
Artículo I. RP1:RP0: Página de memoria de programa

83
Cuadro 2. Registro de opciones
R/W R/W R/W R R R/W R/W R/W
RBU INTDEG
T0CS T0SE PSA PS2 PS1 PS0
RBPU: Conexión de cargas Pull-Up para la puerta B.
1 = Cargas Pull-Up desconectadas INTDEG: Tipo de flanco para la interrupción. 1 = RB0/INT sensible a flanco ascendente. 0 = RB0/INT sensible a flanco descendente. T0CS: Fuente de reloj para el contador (registro TMR0). 1 = Pulsos por pata T0CLK (contador). 0 = Pulsos igual a reloj interno / 4 (temporizador). T0SE: Tipo de flanco activo del T0CLK. 1 = Incremento TMR0 en flanco descendente. 0 = Incremento en flanco ascendente PSA: Asignación del divisor de frecuencia. 1 = Divisor asignado al WDT. 0 = Divisor asignado al TMR0.
Artículo III. PSA2:PSA0: Valor del divisor de frecuencia.
PS2 PS1 PS0
División del TMR0
PS2 PS1 PS0 División del WDT
0 0 0 1 / 2 0 0 0 1 / 1 0 0 1 1 / 4 0 0 1 1 / 2 0 1 0 1 / 8 0 1 0 1 / 4 0 1 1 1/ 16 0 1 1 1 / 8 1 0 0 1 / 32 1 0 0 1 / 16 1 0 1 1 / 64 1 0 1 1 / 32 1 1 0 1 / 128 1 1 0 1 / 64 1 1 1 1 / 256 1 1 1 1 / 128

84
Cuadro 3. Registro de Interrupciones
Cuadro 4. Registro identificador del reset
R/W R/W R/W R/W R/W R/W R/W R/W
GIE PEIE T0IE INTE RBIE T0IF INTF RBIF GIE: Activación global de interrupciones..
1 = Interrupciones activadas. 0 = Interrupciones desactivadas. PEIE. Activación de la interrupción de periféricos (comparador) 1 = Activada. 0 = Desactivada. T0IE: Activación de la interrupción del TMR0. 1 = Activada. 0 = Desactivada. INTE: Activación de la interrupción externa. 1 = Activada. 0 = Desactivada. RBIE: Activación de la interrupción de la puerta B. 1 = Activada. 0 = Desactivada.
Artículo IV. T0IF: Indicador de TMR0 se ha desbordado. 1 = TMR0 desbordado. Borrar por software. 0 = No se ha desbordado.
Artículo V. INTF: Software de estado de la interrupción externa 1 = Hubo interrupción externa. Borrar por software. 0 = No hubo interrupción externa.
Artículo VI. RBIF: Señalizador de cambios en la puerta B 1 = Interrupción por cambió de valor la puerta B. 0 = No cambió.
R/W R/W
/POR /BO /POR: Señalizador de Power On Reset (reset por activación del micro).
1 = No hubo Power On Reset. 0 = Ha habido Power On reset. /BO: Señalizador de Brown-Out (Caída de tensión).

85
Los registros PIE1 y PIR1 están relacionados con el comparador, así como
CMCON y VRCON, y no serán explicados ya que el PIC16C84, en el que se
centra este estudio, carece de él. El registro FSR es utilizado en la gama baja, por
lo que tampoco nos ocuparemos de él.
Los registros TMR0, PORTA, PORTB, TRISA Y TRISB, serán, por comodidad,
estudiados en el apartado de programación, así como el WDT.
2.3.7 El bus serie I2C
Éste es un tipo de bus serie que utiliza sólo dos hilos trenzados y una masa
común para la interconexión de los distintos periféricos. La velocidad máxima a la
que se puede transmitir con este bus es de 100 Khz. (actualmente se está
implantando la frecuencia de 400 Khz.). Con el mismo circuito (dos hilos) se puede
llegar a controlar hasta 128 dispositivos. La principal utilidad es la de
comunicación entre periféricos cuando la distancia no es muy grande.
Figura 13. Interconexión de entre periféricos
Fuente: www.comunidadelectronicos.com

86
El maestro (master) es el encargado de iniciar y terminar la transferencia de
información y es el que genera la señal de reloj , cuya frecuencia es fija y a 100
Khz. los esclavos (slave), hasta 128, son los dispositivos direccionados por el
maestro, mediante 7 bits (dirección del esclavo). La línea de datos (SDA) es
utilizada tanto por el maestro como por el esclavo para la transmisión de
información.
Cuando el maestro inicia una trama de comunicación, envía a través de la línea de
datos la dirección del esclavo con el que se pretende establecer una
comunicación. Todos los esclavos reciben dicha dirección, pero es uno solo el que
responderá y el resto permanece en espera de que se inicie una nueva trama.
Las dos líneas SCL y SDA están conectadas a la línea de positivo de
alimentación, a través de resistencias cuya misión es asegurar una mínima carga
de la línea, necesaria para que la transmisión sea estable ante posibles "ruidos"
externos. Estas resistencias son llamadas de pull-up, y su valor está comprendido
entre 1Ky 10K dependiendo de la tensión de alimentación y de los dispositivos
conectados. Como valor orientativo 2K para una tensión de alimentación de 5V.
Otra función que tienen estas resistencias es la de permitir que tanto la línea de
datos como la de reloj sean bidireccionales, ya que cualquier dispositivo (maestro
o esclavo) puede forzar a nivel bajo la línea o dejarla libre, teniendo entonces un
nivel alto en la línea, siendo leída por los otros dispositivos. Esto que en principio
no parece muy útil en la línea de reloj, es fundamental cuando el sistema tiene
conectado más de un maestro. Cuando la línea de datos y la de reloj están a nivel
alto (ningún dispositivo está actuando), se dice que el bus está en "reposo" o
"libre".

87
Antes de entrar en las especificaciones del bus I2C, vamos a ver un ejemplo de
como podemos identificar (mediante los 7 bits que forman la dirección del esclavo)
cada uno de los 128 dispositivos que podemos conectar en un mismo bus.
Tabla 2. Direccionamiento de la memoria para la familia PCF
REFERENCIA FUNCIÓN BITS DE LA DIRECCIÓN A6 A5 A4 A3 A2 A1 A0
PCF8573 Reloj 1 1 0 1 O X X
PCF8570 Memoria RAM 1 0 1 0 X X X
PCF8582C-2 Memoria EEPROM 1 0 1 0 X X X
PCF8591 Convertidor A/D-D/A 1 0 0 1 X X X
Fuente: www.comunidadelectronicos.com
El modo de identificación de cada uno de los dispositivos (para esta familia) es el
siguiente: el fabricante nos da unos bits fijos que formarán parte de la "dirección
del dispositivo" y otros que podemos configurar mediante unos terminales (del A0
al A2 para los circuitos integrados de esta familia), que hay en cada uno de los
dispositivos, con los que actuaremos sobre los bits que han quedado sin
configurar, para completar la dirección de identificación de cada dispositivo.
Obsérvese que para dispositivos de la misma función, los bits que son fijos tienen
el mismo valor, de esta forma podemos identificar de una forma más rápida con
que tipo de dispositivo está intercambiando información.

88
Veamos a continuación las especificaciones las especificaciones de la
comunicación en un bus que utiliza el formato o protocolo I2C.
El inicio de la transmisión se determina con el bit de inicio (S) y el final de la
transmisión mediante otro bit, el de stop (P). En la figura 14 se representan los
niveles de señal con los que funciona el bus I2C.
Figura 14. Niveles de señal en el bus I2C
Fuente: www.comunidadelectronicos.com
Como hemos mencionado anteriormente, en el formato I2C cada dispositivo tiene
asignada una dirección de 7 bits, que envía el maestro cuando comienza una
trama de comunicación con uno de ellos. En toda trama tendremos siempre el bit
de inicio y una dirección del periférico o esclavo. Tras la dirección del periférico se
añade el bit de recepción/transmisión o lectura/escritura (R/W). Si R/W=0 será una
recepción o lectura y si R/W = 1 será transmisión o escritura. A continuación del bit
de R/W, se envía un bit de acuse de recepción o reconocimiento (ACK). Tras
todos estos bits, se transmiten los datos, en grupos de 8 bits cada uno, es decir,
en octetos y al finalizar cada octeto se inserta un bit de acuse de recepción o
reconocimiento (ACK), que en este caso puede ser producido por el esclavo o por
el maestro. Estos datos pueden tener una función especial dentro de la trama
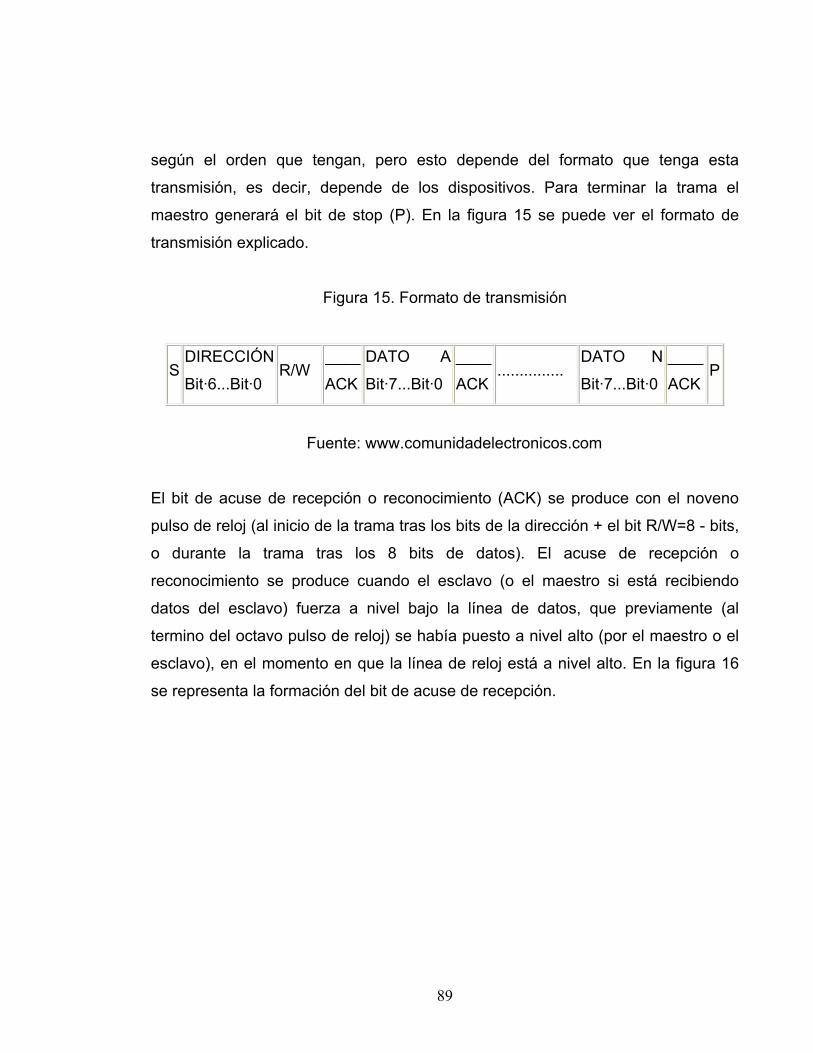
89
según el orden que tengan, pero esto depende del formato que tenga esta
transmisión, es decir, depende de los dispositivos. Para terminar la trama el
maestro generará el bit de stop (P). En la figura 15 se puede ver el formato de
transmisión explicado.
Figura 15. Formato de transmisión
S DIRECCIÓN
Bit·6...Bit·0 R/W
____
ACK
DATO A
Bit·7...Bit·0
____
ACK...............
DATO N
Bit·7...Bit·0
____
ACKP
Fuente: www.comunidadelectronicos.com
El bit de acuse de recepción o reconocimiento (ACK) se produce con el noveno
pulso de reloj (al inicio de la trama tras los bits de la dirección + el bit R/W=8 - bits,
o durante la trama tras los 8 bits de datos). El acuse de recepción o
reconocimiento se produce cuando el esclavo (o el maestro si está recibiendo
datos del esclavo) fuerza a nivel bajo la línea de datos, que previamente (al
termino del octavo pulso de reloj) se había puesto a nivel alto (por el maestro o el
esclavo), en el momento en que la línea de reloj está a nivel alto. En la figura 16
se representa la formación del bit de acuse de recepción.

90
Figura 16. Formato de acuse de recepción.
Fuente: www.comunidadelectronicos.com
2.3.7.1 Memoria I2C
En la figura 17 puede verse la distribución de pines y características de la
memoria. EEPROM I2C.
Figura 17. Encapsulado I2C
En los terminales VDD y VSS se conecta la alimentación.

91
El terminal SCL es la entrada de reloj y el SDA es el terminal de entrada/salida de
datos.
Los terminales A0-A2, son los utilizados para configurar la dirección de
identificación del esclavo, tal y como se explicó en el apartado anterior.
El terminal PTC es la entrada de reloj externo, utilizado en la escritura de la
memoria. Este dispositivo posee un oscilador interno, por tanto no es necesario
aplicar una señal externa de reloj para la escritura de la memoria.
Las características eléctricas especificadas por el fabricante son las siguientes:
• Tecnología de fabricación CMOS.
• Organización de la memoria en 256 posiciones de memoria de 8 bits cada
una.
• Duración mínima de la información de 10 años.
• Ciclos de borrado/escritura de 1.000.000.
• Alimentación de +2.5V a 6V. El terminal VDD es el positivo de alimentación y
VSS el negativo.
• Consumo durante el funcionamiento de 2 mA.
• Consumo en standby 4 µA típico.
• Frecuencia en la señal de reloj de 100 KHz.
El funcionamiento de la memoria I2C, se divide en dos procesos de trabajo:
2.3.7.2 Proceso de escritura
Para ilustrar este proceso de trabajo, se va a describir cómo se realizaría la
escritura de dos bytes cuyas posiciones son consecutivas. Primero el maestro

92
envía una señal de identificación de la memoria a escribir (los 7 bits que identifican
a cada uno de los 128 posibles dispositivos), indicando a continuación mediante el
bit R/W = 0 que se va a realizar una escritura sobre la memoria. Tras el acuse de
recepción por parte de la memoria, se le indica la dirección en la que se desea
escribir el primer dato que sigue. Sólo después de la recepción y del acuse de
recepción de los dos octetos y del envío del bit de stop, se desencadena el
mecanismo de borrado/escritura de la memoria que emplea unos 20 ms para
realizar el borrado y luego la escritura de estos dos octetos (10 ms por octeto), el
incremento de la dirección de la posición del primer octeto al segundo es
automático. Este mecanismo de escritura se pone en práctica con ayuda de un
oscilador controlado por una red RC externa o interna (externo a través del
terminal PTC). Durante el tiempo que dura el proceso de escritura, si el maestro
manda información, la memoria no responderá con la señal de acuse de
recepción, por tanto, el maestro tiene constancia del estado de la memoria.
Aunque se ha explicado el proceso de escritura con dos octetos, es obvio que si al
mandar el primer octeto el maestro ejecuta un bit de stop, sólo se escribirá este
octeto en la posición de memoria indicada. En la figura 18 se encuentra
representado este proceso.

93
TRAMA DE ESCRITURA
Generado por el esclavo
Figura 18. Trama de Escritura.
s s s s
S
DIRECCIÓN DEL
ESCLAVO
bit·6....bit·0
R/W = 0 ACK = 0
DIRECCIÓN DE
POSICIÓN
bit·7....bit·0
ACK = 0 DATO A
bit·7....bit·0 ACK = 0
DATO B
bit·7....bit·0 ACK = 0 P
m m m m m m
m
Generado por el maestro
Fuente: www.comunidadelectronicos.com
Existe otro modo de escribir en esta memoria que consiste en escribir una página
completa, compuesta por 8 bytes. El tiempo empleado en este proceso de
borrado/escritura de estos 8 bytes, es de unos 28 ms consiguiendo de esta forma
una reducción en el tiempo total cuando se necesita escribir varios bytes seguidos.
El proceso de escritura es el mismo que en el caso de dos bytes, la única salvedad
es el número de bytes enviados por el maestro, siendo también automático el
incremento de la dirección que se va a escribir.
2.3.7.3Proceso de lectura
Hay dos posibles modos de lectura, veamos cada uno de ellos.
CASO A: el maestro lee la memoria después de haber indicado la dirección de la
primera posición a leer. En la figura 19 se puede ver como el inicio de la trama es

94
idéntico al proceso de escritura, pero tras enviar la dirección de la primera posición
de memoria, se vuelve a enviar la dirección de identificación de la memoria,
poniendo en esta ocasión el bit R/W = 1.

95
Figura 19. Trama de lectura.
TRAMA DE LECTURA
Generado por el esclavo
s s s
S DIRECCIÓN DEL
ESCLAVO bit·6....bit·0 R/W = 0 ACK = 0
DIRECCIÓN DE
POSICIÓN
bit·7....bit·0
ACK = 0 DIRECCION DEL
ESCLAVO bit·7....bit·0 R/W = 1 ACK = 0
m m m m m m
s s s
DATO A
bit·7....bit·0 ACK = 0 DATO B bit·7....bit·0 ACK = 0
DATO C
bit·7....bit·0 ACK = 0 P
m m m
Generado por el maestro
Fuente: www.comunidadelectronicos.com
96
Como se puede observar en la figura 19, tras el bit ACK de acuse de recepción
por parte del esclavo, es él el que controla la línea de datos, enviando el dato
contenido en la posición de memoria indicada. Tras el octeto enviado por el
esclavo, el maestro tiene que generar el bit de acuse de recepción.
El incremento en la dirección de la posición de memoria es, como en el caso de la
escritura, automático. Cuando el valor de la posición de la memoria llegue a su
máximo valor (255), automáticamente pasará a tomar el valor cero y continuará
incrementándose cíclicamente.
El modo de detener la lectura de la memoria es cuando el maestro no activa el bit
de acuse de recepción del último octeto leído (ACK = 1). A continuación el maestro
debe generar el bit de stop.
CASO B: el maestro lee directamente la memoria después de la orden de
lectura. En este caso, se envía una señal al esclavo en modo de lectura y, sin
ninguna otra forma de proceso, se le envían sus datos a partir de la última
dirección a la que se tuvo acceso por una escritura o por una lectura. No es
necesario entonces indicar la dirección de inicio y, por este hecho, se puede ganar
tiempo en el intercambio.
El modo de detener la lectura de la memoria es idéntico al caso anterior.
Tras la aplicación de la tensión de alimentación, el registro donde se contiene la
dirección de la posición de la memoria estará a cero, pudiendo emplear este caso
sabiendo que la dirección de inicio será cero.

97
2.3.8 MAX232
El circuito integrado MAX232 cambia los niveles TTL a los del estándar RS-232
cuando se hace una transmisión, y cambia los niveles RS-232 a TTL cuando se
tiene una recepción. El circuito típico se muestra en la figura (20).
Figura 20. Configuración Max 232.

98
3. METODOLOGÍA
3.1 Enfoque de la investigación
La metodología utilizada en este proyecto de investigación la podremos dividir en
dos partes
• OBSERVACIÓN DIRECTA
• RECOLECCIÓN DE DATOS
La observación directa consta de la inspección visual de la estructura metálica en
este caso los planos del avión C-130 Hércules de la FAC, en la cual se instalarán
una serie de transductores para así observar el comportamiento de dicha
estructura.
La recolección de datos consta de la visualización de los datos obtenidos a partir
de la instalación del dispositivo en algunos puntos específicos en los planos de un
avión c-130 Hércules de la FAC. Con esta información se podrá observar cuál es
su deformación a partir de las cargas que se están generando por el esfuerzo
estructural.
3.2. Línea de investigación usb/sublínea de facultad/campo temático del programa Líneas Institucionales de Investigación
El Consejo de Investigación Bonaventuriano -CIB- viene trabajando en la
conceptualización de las Líneas Institucionales de Investigación. A partir de ese
ejercicio ha establecido las siguientes líneas:

99
1. Pedagogía y desarrollo humano
2. Tecnologías actuales y sociedad
3. Violencia, paz y cultura
4. Ciclo de vida, cultura y sociedad
5. Ciencias cognoscitivas
6. Desarrollo económico y social
7. Ontología, epistemología y ética
8. Historia, lenguas
9. Dios, Iglesia y Hombre
La investigación que realiza la Facultad de Ingeniería se articula en gran medida
con la línea número 2, es decir, Tecnologías actuales y sociedad (ver Tabla 3).6
6 Facultad ingeniería Universidad de San Buenaventura, Bogotá.

100
Tabla3. Línea Institucional de Investigación número 2: Tecnologías Actuales y Sociedad.
Conceptos Generales
Tecnología: Es el conjunto de conocimientos tanto
técnicos como científicos aplicados a un campo específico.
Actualidad: Se refiere al presente a la época o tiempo que
está transcurriendo
Sociedad: Es un conjunto de personas que conviven y se
relacionan en un espacio y tiempo determinado
Contextualización
Conocimientos técnicos y científicos de vanguardia que
ayuden a la solución de problemas o faciliten los procesos de
mejoramiento de la calidad de vida de las personas que
pertenecen a un grupo social determinado.
Conocimientos implicados
Tecnologías de vanguardia
Aplicaciones Tecnológicas
Adaptación y/o adopción de Tecnologías
Necesidades de la Sociedad
Contextualización
Es necesario para el desarrollo de esta línea de Investigación,
la actualización constante de los conocimientos tecnológicos
en diferentes áreas como informática, comunicaciones,
control, etc., con el fin de poder efectuar las aplicaciones y
adaptaciones requeridas en la solución de los problemas y en
la satisfacción de las necesidades de la sociedad.
Resultados esperados
Soluciones viables en el campo tecnológico
Conocimientos actualizados en temas específicos
Proyectos que ayuden al desarrollo de la sociedad
Mejorar la integración Sociedad - Institución educativa
Contextualización
Se espera con esta línea de investigación, mantener
actualizados los conocimientos científicos y técnicos que
permitan generar proyectos de calidad con un enfoque social,
posibilitando el desarrollo de la sociedad lo cual a su vez
mejora las relaciones entre universidad y comunidad.
Aplicabilidad
Aplicación de tecnologías actuales en educación
Procesos tecnológicos para el mejoramiento de la
competitividad y productividad de la industria y el comercio
Adaptación de tecnologías en proyectos sociales
Actualización del conocimiento en tecnologías de punta
Contextualización
Los Proyectos enmarcados en esta línea de investigación
contribuirá, mediante la creación o adaptación de tecnología,
al desarrollo social y al mejoramiento de la calidad educativa
de nuestra institución
Recursos
Currículos flexibles a los cambios de tecnología Personal
docente calificado y capacitado
Software constantemente actualizado
Equipos y laboratorios específicos
Bibliografía y recursos actualizados sobre tecnologías de
punta.
Contextualización
Los recursos para estructurar adecuadamente esta línea se
basan principalmente en la actualización constante de los
docentes, equipos, software, etc. con el fin de que la
tecnología utilizada y/o desarrollada tenga completa vigencia
con referencia a los requerimientos de la sociedad en el tema
específico.

101
FUENTE: CIB. Documento borrador sobre Líneas Institucionales de
Investigación.
Sublíneas de investigación de la Facultad En consonancia con las Líneas Institucionales de Investigación y con sus propias
necesidades, la Facultad de Ingeniería ha asumido cuatro sublíneas de
investigación, que son las siguientes:
1. Procesamiento de señales digitales y analógicas.
2. Instrumentación y Control para la Verificación de Procesos.
3. Sistemas de Información, Comunicación y Robótica.
4. Pedagogía y didáctica de las ciencias básicas y la ingeniería.
1. Procesamiento de señales digitales y analógicas. Responde a la pregunta
¿Qué diseños algorítmicos cumplirán con los requerimientos del procesamiento de
señales digitales y/o analógicas en los diversos ámbitos disciplinares de la
Facultad? La tabla 4 presenta los aspectos más importantes de esta sublínea de
investigación. (Ver tabla 4).

102
Tabla 4. Sublínea de investigación número 1: Procesamiento de señales
digitales y analógicas.7
7 Facultad ingeniería Universidad de San Buenaventura, Bogotá.
Conceptos Generales
Procesamiento: someter algún dato o señal a una transformación,
elaboración etc.
Señal: fenómeno físico en el cual pueden variar una o más
características para representar información.
Representación eléctrica de un fenómeno natural
Sección 1.01 Señal analógica: aquella que puede tomar
cualquier valor a lo largo del tiempo, no hay una cantidad mínima de
variación
Sección 1.02 Señal digital: aquella que puede variar sólo de
una manera determinada.
Contextualización
El procesamiento de señales digitales y analógicas hace referencia a la
implementación y/o diseño de artefactos tecnológicos que permitan un
adecuado procesamiento de las señales provenientes de cualquier
proceso o fenómeno que deba ser abordado desde la ingeniería en sus
diferentes campos de acción.
i) Conocimientos implicados
Algoritmos, sensórica, conversores A/D y D/A, transformada Z, La place,
Fourier y wavelet.
Tecnología de semiconductores, filtros, etc.
Contextualización
Para abordar los proyectos pertenecientes a ésta sublínea es necesario
tener una sólida formación matemática en el modelamiento de señales
particularmente.
Resultados esperados
Diseños algorítmicos para procesamiento de señales digitales y
analógicas.
Diseño y construcción de dispositivos para procesamiento de cualquier
tipo de señal.
Contextualización
Los proyectos desarrollados abordarán el diseño y construcción de
dispositivos que garanticen el adecuado procesamiento de señales.
Aplicabilidad
Algoritmos y dispositivos para el procesamiento de señales de cualquier
naturaleza obtenidas de cualquier proceso que coadyuve al desarrollo
tecnológico y social del país en los sectores aeronáutico, electrónico,
acústico y mecánico entre otros.
Contextualización
Los proyectos enmarcados en ésta sublínea atenderán las necesidades
que se presenten en procesamiento de señales de algún proceso
industrial o proveniente de los diversos sectores productivos como el
aeronáutica, electrónico, acústico, etc.
Recursos
Recurso humano calificado y capacitado (investigadores, docentes y
estudiantes)
Equipos para recolección y análisis de señales.
Software especializado para manipulación de señales.
Bibliografía actualizada y acceso a redes de información.
Contextualización
Los recursos requeridos se centran fundamentalmente en investigadores,
docentes y estudiantes calificados y capacitados para abordar el tema de
estudio, así como una adecuada infraestructura tecnológica y de apoyo
para la ejecución de los diversos proyectos que surjan alrededor del
procesamiento de señales.

103
3.3. TÉCNICAS DE RECOLECCIÓN DE INFORMACIÓN
Al momento de recolectar la información necesaria para el análisis estructural de
los aviones (elaborado por técnicos o ingenieros aeronáuticos de la FAC), se
deben tener en cuenta algunos aspectos como son: la fuerza ejercida sobre la
estructura, la cual se obtendrá del dispositivo que se llevará a cabo con este
trabajo de grado, altitud del vuelo, velocidad de crucero, de despegue y aterrizaje,
lectura de los acelerómetros del avión, temperatura, peso total del avión al
momento de la recolección de los datos, todos estos serán obtenidos directamente
de los instrumentos aeronáuticos, mediante una lista de chequeo para así tener
un registro de todo lo realizado.
3.4 POBLACIÓN Y MUESTRA
La población para este trabajo de investigación serán los aviones de la FAC, la
muestra será tomada del grupo de aviones de carga como son los Hércules C-130
y más específicamente de la aeronave con matrícula FAC 1008.
3.5. HIPÓTESIS A raíz del problema presentado en los aviones y la dificultad del análisis
estructural, se pensó en un sistema de adquisición de datos para recolectar la
información estructural de los puntos críticos encontrados en el fuselaje del avión,
para eso se plantearon varias soluciones como fueron:
Un sad a partir de:
• Microcontroladores
• Microprocesadores

104
• FPGA
Al transcurrir del proyecto se fue depurando la información y por consiguiente
desechando algunas ideas, los microprocesadores desparecieron ya que su
programación y consecución son algo difícil, lo mismo sucedió con las FPGA’s, al
final sólo quedaron los microcontroladores, allí se encontraron dos opciones:
• Motorola
• Pic’s
Entre los microcontroladores los motorola son muy eficientes, además están
diseñados para no ser afectados por el ruido, pero estos también fueron
descartados ya que los gastos del proyecto fueron asumidos por los integrantes
del grupo, por consiguiente se buscaba eficiencia y economía y para esto los pic’s
se ajustan a los requerimientos del grupo de investigación
Al escoger el microcontrolador a usar, se entra a procesar la señal, como lo es
filtrarla, convertirla a una señal digital y amplificarla para lograr una buena lectura
de las señales.
Al tener un sistema de adquisición de datos se entró a observar que tipo de
sensores o transductores podrían recolectar la información que se deseaba.
En este caso los transductores elegidos son galgas extensiométricos, en un
principio se pensó en incluir las galgas triaxiales, que permitiría la medición de las
fuerzas en varios ejes, pero también las uniaxiales proporcionarían información
valiosa para que los ingenieros aeronáuticos o los encargados del análisis de los

105
datos lo pudieran realizar. Como en el caso de los microcontroladores se eligieron
transductores económicos y eficientes y para este caso son las galgas uniaxiales.

106
3.6. VARIABLES 3.6.1 VARIABLES INDEPENDIENTES Entre las variables independientes se encontraron:
• La temperatura
• La humedad
• La presión atmosférica
• Velocidad del viento
• La gravedad
• Velocidad de la aeronave.
3.6.2 VARIABLES DEPENDIENTES Entre las variables dependientes se encontraron:
• El ruido
• La elasticidad del material (Al).
• Deformación del sensor.

107
4. PRESENTACIÓN Y ANÁLISIS DE RESULTADOS
El software tiene como apariencia:
Figura 21. Visualización Software

108
Al momento de la descarga de los datos podremos obtener una grafica del
siguiente estilo.
Figura 22. Visualización 6 galgas.

109
Figura 23. Visualización 1 galga
Los datos obtenidos en las mediciones son guardados en la memoria I2C para
luego ser descargados por este software, al momento de la descarga éste crea un
archivo en Excel.

110
Tabla 5. Registros en Excel. Galga1 Galga2 Galga3 Galga4 Galga5 Galga6
116 116 116 116 116 116
89 89 89 89 89 89
86 86 86 86 86 86
88 88 88 88 88 88
86 86 86 86 86 86
87 87 87 87 87 87
86 86 86 86 86 86
89 89 89 89 89 89
85 85 85 85 85 85
88 88 88 88 88 88
85 85 85 85 85 85
88 88 88 88 88 88
86 86 86 86 86 86
88 88 88 88 88 88
87 87 87 87 87 87
78 78 78 78 78 78
88 88 88 88 88 88
86 86 86 86 86 86
74 74 74 74 74 74
95 95 95 95 95 95
82 82 82 82 82 82
78 78 78 78 78 78
90 90 90 90 90 90
77 77 77 77 77 77
80 80 80 80 80 80
93 93 93 93 93 93
69 69 69 69 69 69
88 88 88 88 88 88
87 87 87 87 87 87
74 74 74 74 74 74
90 90 90 90 90 90
85 85 85 85 85 85

111
Con la tabla anterior el software grafica el comportamiento de la galga, que a su
vez es el mismo de la estructura.
Figura 24. Pruebas en la maquína universal de ensayos.

112
Pruebas Para la calibración del dispositivo fue necesario someterlo a pruebas en la
máquina universal de ensayos, que se encuentra en el Sena, con la colaboración
del ingeniero metalúrgico Hugo Zapata.
Figura 25. Máquina universal de ensayos
Figura 25a. Figura 25b.
Figura 25c. Figura 25d.

113
Figura 26. Probetas
Figura 27. Ubicación de la galga en la probeta

114
5. DESARROLLO INGENIERIL
Al momento de plantear soluciones al problema mencionado al comienzo del texto
se decidió diseñar e implementar un SAD versátil que fuera capaz de responder
óptimamente bajo las condiciones de trabajo exigidas.
Partiendo de las hipótesis, los conocimientos adquiridos a través de todo el
proceso de aprendizaje, y la experiencia se pudo llegar a la siguiente solución:
Figura 28. Diagrama de Bloques SAD
Se puede observar en el diagrama de bloques anterior que el SAD esta
compuesto por:
• Transductores o sensores
Puerto serial
MÓDULO DE PROCESAMIENTO
Sensor
Acondicionador de señal
115
• Acondicionadores de señal
• Modulo de procesamiento
• Interfaz y software con el PC.
A continuación se desglosará cada una de estas partes.
Transductores
Para escoger el transductor o sensor se estudio el entorno en que se iba a trabajar
teniendo en cuenta, la magnitud a medir, características ambientales, costos de
adquisición, peso, exactitud de medida y disponibilidad; se decidió utilizar las
galgas extensiométricas o sensores de deformación con las siguientes
características:
SG-7/350-LY43
Factor de Galga
2.06
Valor
350Ω±0.2%
Acondicionadores de señal.
Lo que mide un sensor de deformación es el cambio experimentado en la
resistencia, ∆R, siendo este muy pequeño, el valor de ∆R es de unos cuantos mili
ohmn, para medir estos pequeños cambios resistivos es necesario utilizar un
puente de Wheastone, de allí nace la necesidad de los acondicionadores de señal,
ya que al balancear el puente y adquirir las variaciones de la galga, se necesita
amplificar la señal para que esta pueda ser leída y manipulada, también se debe

116
tener en cuenta el ruido inducido en los circuitos y para esto se debe implementar
un filtro ya que esto podría alterar las lecturas.
Balanceo de un puente de sensores de deformación, para este caso se utilizó un
puente de wheastone básico de resistencias.
Figura 29. Puente de Wheastone Balanceado
El arreglo de puente de resistencia y el voltaje de alimentación E convierten un
cambio en la resistencia en el sensor de deformación, ∆R, en un voltaje de salida
diferencial.
RREEE
421 ∆
×=− Esto cuando R1=R2=R
GananciaVEEE 021 ×=−
Estas ecuaciones aplican para los cálculos teóricos pero como todos saben en la
realidad y gracias a la experiencia se puede llegar a la conclusión que no hay
R1 R2
∆R+R
2,.2k 2,.2k
350 350

117
componentes ideales y por eso debemos entrar al método de prueba y ensayo
para así llegar a las condiciones deseadas.
En el puente utilizado se encuentra un sensor en operación y uno de
compensación de temperatura que son iguales dentro de un margen de 1 mΩ,
para completar el puente se instalan dos resistencias de 2.2K, es necesario igualar
las resistencia para balancear el puente y para esto se utiliza un potenciómetro.
Preamplificación
Lo que se hizo en el paso anterior, debe conectarse a un amplificador de
instrumentación y para este caso es el AD620, en esta oportunidad el amplificador
utiliza una resistencia externa para definir ganancias que van de 1 a 1000, el
fabricante proporciona la relación entre la ganancia y Rg de la siguiente manera:
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
RgGanancia 494001
Para el caso específico del dispositivo diseñado se escogió una resistencia de
100Ω
495100
494001 =⎟⎠⎞
⎜⎝⎛+=Ganancia
Etapa de amplificación.
Para la etapa de amplificación se utilizó un amplificador operacional lm324,
aprovechando que el encapsulado cuenta con 4 amplificadores, lo que se hizo fue
utilizar uno de estos para obtener un voltaje diferencial de 2.5 Vdc
aproximadamente, otro para amplificar con una ganancia de aproximadamente 23

118
y por último un filtro de primer orden pasa-bajos de 200Hz, la salida del
amplificador de instrumentación AD620, del amplificador con ganancia 23 y el
condensador del filtro se conectan a la salida del amplificador al que tenemos el
voltaje diferencial.

119
Figura 30. Diagrama esquemático CAS
La etapa de conversión análoga digital, comunicación con la memoria e interfaz
con el computador se realizó con el microcontrolador PIC 16f486a.
Aprovechando algunos de sus recursos se obtuvieron:
El puerto A se destinó para las Entradas análogas.
Puerto B se destino para la comunicación entre el microcontrolador, la memoria
I2C y el PC.
El microcontrolador funciona a una frecuencia de 20Mhz
El conversor análogo digital del microcontrolador funciona a una velocidad de
20Mhz/32=625Khz, con una resolución de conversión de 8 bits.
También se obtuvo una rata de muestreo de 1ms, acomodándola a las
necesidades existentes
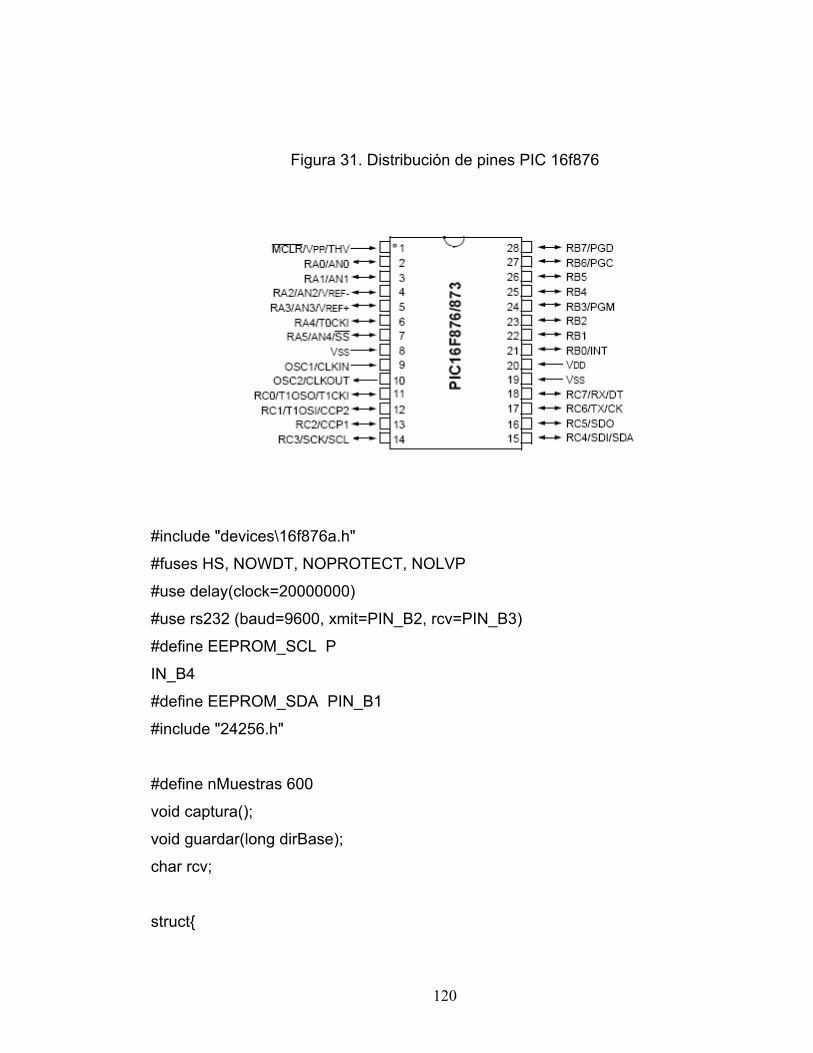
120
Figura 31. Distribución de pines PIC 16f876
#include "devices\16f876a.h"
#fuses HS, NOWDT, NOPROTECT, NOLVP
#use delay(clock=20000000)
#use rs232 (baud=9600, xmit=PIN_B2, rcv=PIN_B3)
#define EEPROM_SCL P
IN_B4
#define EEPROM_SDA PIN_B1
#include "24256.h"
#define nMuestras 600
void captura();
void guardar(long dirBase);
char rcv;
struct

121
int AD0;
int AD1;
int AD2;
int AD3;
int AD4;
int AD5;
sensores;
struct
boolean comunicar;
boolean b1;
boolean b2;
boolean b3;
boolean b4;
boolean b5;
boolean b6;
boolean Led;
//boolean ResetRedundante;
ptb;
#byte ptb=0x06
Void main ()
long i;
setup_adc_ports (ALL_ANALOG);
setup_adc( ADC_CLOCK_DIV_32 );
set_tris_b(0x01111111);
for (;;)

122
if(ptb.comunicar==0)
ptb.led = 1;
rcv = getch();
switch(rcv)
case 'A':
break;
case 'B':
for(i=0;i<nMuestras;i++)
putc(read_ext_eeprom(i)); //putc=pone en rs232
delay_ms(10);
ptb.led = !ptb.led;
ptb.led = 0;
break;
else
i=0;
while(i<nMuestras)
captura();
guardar(i);
i=i+6;
delay_ms(1); ///Delay de muestreo
ptb.led = !ptb.led;
ptb.led = 1;
while(ptb.comunicar==1);

123
ptb.led = 0;
void captura()
int i;
for(i=0;i<6;i++)
set_adc_channel(i);
delay_us(20);
*(&sensores+i)=read_adc();
void guardar(long dirBase)
int i;
for(i=0;i<=5;i++)
write_ext_eeprom(dirBase + (long)i,*(&sensores+i));
delay_ms(10);
Los rescursos utilizados del PIC han sido totalmente por software.

124
Figura 32. Diagrama esquemático DAQ
La visualización de los datos se realizará mediante un software desarrollado en
visual Basic.
Option Explicit
' NOTA IMPORTANTE: si ejecuta Windows NT 4.0, asegúrese de instalar
' el Service Pack 3.
' Public shtGas As WorkSheet ' Use esto si trabaja con Excel 95
Public appDatos As Excel.Application
Public shtDatos As Workbook
Public rngDatos As Range
Public ExcelWasNotRunning As Boolean
Public intRows ' Número de filas. Use esto para establecer el número de
filas del gráfico.
Public arrGalgas() ' Galgas

125
Public Sub SetupChart()
' IMPORTANTE: si su equipo no tiene instalado Excel 97,
' debe cambiar la referencia a la biblioteca de objetos de Excel 95.
' A continuación, en la sección de declaraciones de arriba, cambie la declaración
' de variable "shtGas as Workbook" a "shtGas As Worksheet"
On Error Resume Next 'Ignorar errores
Set appDatos = GetObject(, "Excel.Application") 'buscar una copia en ejecución
de Excel
If Err.Number <> 0 Then 'Si no se está ejecutando Excel
Set appDatos = CreateObject("Excel.Application") 'ejecútelo
ExcelWasNotRunning = True
End If
Err.Clear ' Borrar el objeto Err si se produce un error.
On Error GoTo 0 'Reanudar el procesamiento normal de errores
Set shtDatos = appDatos.Workbooks.Open(App.Path & "\Datos.xls")
' Establece la variable de rango a CurrentRegion de la columna column A.
Set rngDatos = shtDatos.Worksheets(1).Range("A1").CurrentRegion
' Con el objeto Range puede obtener el número de filas de la hoja de cálculo
' Reste 1 porque la primera fila es un encabezado y no contiene datos válidos.
intRows = rngDatos.Rows.Count - 1
' Configurar el gráfico.
126
With frmChart.chtSample
.Title = shtDatos.Name
.RowCount = intRows ' Establece el número de filas. Esto debe hacerse
' antes de establecer los datos del gráfico.
'.ColumnCount = 5
'.ColumnLabelCount = 5
.AllowDynamicRotation = True
.AllowDithering = True ' Se establece a False si el monitor a color
' sólo usa 8 bits.
' Establece la leyenda del mapa en la parte superior derecha. Después
' establece las coordenadas de la leyenda.
.Legend.Location.LocationType = VtChLocationTypeTop
'.Legend.Location.LocationType = VtChLocationTypeTopRight
.Legend.VtFont.Style = VtFontStyleBold
'.Legend.Location.Rect.Max.Set 7560, 5132
'.Legend.Location.Rect.Min.Set 3004, 4864
'.ChartType = VtChChartType3dLine
End With
End Sub
Public Sub PopAllArray(ByRef thisarray, col1 As String, col2 As String, col3 As
String, col4 As String, col5 As String, col6 As String)
Dim i As Integer
ReDim thisarray(1 To intRows, 1 To 6)
frmChart.PrCarga.Value = 0
frmChart.PrCarga.Max = intRows
For i = 2 To intRows
' Obtener los valores .

127
thisarray(i, 1) = Format(rngDatos.Range(col1 & i + 1).Value, "##.##")
thisarray(i, 2) = Format(rngDatos.Range(col2 & i + 1).Value, "##.##")
thisarray(i, 3) = Format(rngDatos.Range(col3 & i + 1).Value, "##.##")
thisarray(i, 4) = Format(rngDatos.Range(col4 & i + 1).Value, "##.##")
thisarray(i, 5) = Format(rngDatos.Range(col5 & i + 1).Value, "##.##")
thisarray(i, 6) = Format(rngDatos.Range(col6 & i + 1).Value, "##.##")
frmChart.PrCarga.Value = i
Next i
End Sub
Public Sub AllColChart()
' Usar la matriz arrGalgas para crear un gráfico de tres columnas. Establece la
' propiedad ChartData a la matriz y después establecer las etiquetas
' de título y columna.
With frmChart.chtSample
.ChartData = arrGalgas
.Title = "Galgas"
.Column = 1
.ColumnLabel = "Galga 1"
.Column = 2
.ColumnLabel = "Galga 2"
.Column = 3
.ColumnLabel = "Galga 3"
.Column = 4
.ColumnLabel = "Galga 4"
.Column = 5
.ColumnLabel = "Galga 5"
.Column = 6
.ColumnLabel = "Galga 6"

128
.Refresh
End With
End Sub
Public Sub Chart(chtTitle As String, colLabel As String)
' Este procedimiento utiliza una matriz como argumento y establece la propiedad
' ChartData a la matriz, lo cual crea un gráfico.
With frmChart.chtSample
.ChartData = arrGalgas
.Title = chtTitle
.ColumnCount = 1
.ColumnLabelCount = 1
.Column = 1
.ColumnLabel = colLabel
.Refresh
End With
End Sub
Public Sub PopOneArray(thisarray As Variant, col As String)
' Este procedimiento sólo llena matrices.
Dim i As Integer
ReDim thisarray(1 To intRows, 1 To 2)
frmChart.PrCarga.Value = 0
frmChart.PrCarga.Max = intRows
For i = 2 To intRows
' Obtener valores.
thisarray (i, 1) = Format(rngDatos.Range(col & i + 1).Value, "##.##")
frmChart.PrCarga.Value = i
Next i
End Sub
129
Public Sub Cleanup()
' Invocar este procedimiento antes de que finalice la aplicación.
' Establecer todas las variables globales a Nothingg
shtDatos.Close 'cerrar hoja de cálculo
Set shtDatos = Nothing
Set rngDatos = Nothing
' Si esta copia de Microsoft Excel no se estaba ejecutando al iniciar
' ciérrela con el método Quit de la propiedad Application.
' Observe que cuando intente salir de Microsoft Excel, la barra de título
' parpadea y se muestra un mensaje que le pregunta si
' desea guardar los archivos guardados.
If ExcelWasNotRunning = True Then
appDatos.Quit
End If
Set appDatos = Nothing
End Sub
Dim FlagDescarga As Boolean
Dim Rcv() As Byte
Dim ContadorEv As Integer
Private Sub Combo1_Click()
Select Case Combo1.ListIndex
Case 0
PopOneArray arrGalgas, "A"

130
Chart "Galgas", "Galga1"
Case 1
PopOneArray arrGalgas, "B"
Chart "Galgas", "Galga2"
Case 2
PopOneArray arrGalgas, "C"
Chart "Galgas", "Galga3"
Case 3
PopOneArray arrGalgas, "D"
Chart "Galgas", "Galga4"
Case 4
PopOneArray arrGalgas, "E"
Chart "Galgas", "Galga5"
Case 5
PopOneArray arrGalgas, "F"
Chart "Galgas", "Galga6"
End Select
End Sub
Private Sub Command1_Click()
PopOneArray arrGalgas, "A"
Chart "Galgas", "Galga1"
End Sub
Private Sub Descarga_Click()
ContadorEv = 1
frmChart.PrCarga.Value = 0
frmChart.PrCarga.Max = 100

131
MSComm1.InBufferCount = 0
MSComm1.Output = "B"
FlagDescarga = True
End Sub
Private Sub Form_Load()
MSComm1.CommPort = 8
MSComm1.PortOpen = True
MSComm1.InputMode = comInputModeBinary
Combo1.AddItem "Galga 1"
Combo1.AddItem "Galga 2"
Combo1.AddItem "Galga 3"
Combo1.AddItem "Galga 4"
Combo1.AddItem "Galga 5"
Combo1.AddItem "Galga 6"
Me.Show
SetupChart ' Configura el gráfico.
End Sub
Private Sub Form_Unload(Cancel As Integer)
Cleanup
End Sub
Private Sub Grafica_Click()
PopAllArray arrGalgas, "A", "B", "C", "D", "E", "F"
AllColChart
End Sub
132
Private Sub MSComm1_OnComm()
Rcv = MSComm1.Input
MSComm1.InBufferCount = 0
If FlagDescarga = True Then
rngDatos.Range("A" & ContadorEv + 1).Value = CStr(Rcv(0))
rngDatos.Range("B" & ContadorEv + 1).Value = CStr(Rcv(1))
rngDatos.Range("C" & ContadorEv + 1).Value = CStr(Rcv(2))
rngDatos.Range("D" & ContadorEv + 1).Value = CStr(Rcv(3))
rngDatos.Range("E" & ContadorEv + 1).Value = CStr(Rcv(4))
rngDatos.Range("F" & ContadorEv + 1).Value = CStr(Rcv(5))
frmChart.PrCarga.Value = ContadorEv
ContadorEv = ContadorEv + 1
If ContadorEv > 100 Then
MsgBox "Descarga terminada", vbInformation, "Ok!"
FlagDescarga = False
End If
End If
End Sub

133
6. CONCLUSIONES
El sistema de adquisición de datos para el análisis estructural para un avión C-130
diseñado y construido a través del presente proyecto permite la recolección de
esfuerzos en una viga, el esfuerzo es la cantidad de fuerza ejercida sobre un área
unitaria. Este proyecto ha consistido básicamente en el desarrollo del software de
adquisición de datos, el cual se realiza mediante un PC y una tarjeta de
adquisición de datos, se utilizó transductores en este caso strain gauges o galgas
extensiométricas, el puerto RS232 para la comunicación serial y programas como:
visual Basic, mplab, Pic C compiler.
Se ha demostrado mediante múltiples pruebas y ensayos reales que el dispositivo
o equipo implementado funciona correctamente y presenta características
similares a los de un equipo comercial, significando un ahorro considerable en
costos, además las características del sistema pueden ser mejorados en el futuro.
134
7. RECOMENDACIONES
La acción completa de los adhesivos ocurre a través de una reacción catalítica de
la humedad absorbida del aire. Las condiciones más favorables para la adhesión
son bajo valores de humedad relativa (HR) de entre 30% y 80%. Con una HR de
menos de 30%, la reacción se retarda notablemente y en casos extremos se
detiene. Con valores de HR mayores a 80% se presenta un fenómeno que reduce
la vida máxima de la adhesión. Por esta razón se deben observar estos límites de
humedad relativa.
Una adhesión óptima sucede cuando el adhesivo se aplica en capas muy finas.
Capas gruesas requieren más tiempo para secar o nunca secan, por lo tanto,
superficies muy burdas deben ser evitadas y el proceso de aplicación del adhesivo
debe seguirse fiel y cuidadosamente.
La velocidad de la adhesión completa depende de la condición química del
material donde se va a hacer la aplicación. Los materiales alcalinos, aceleran la
polimerización (la reacción química de adhesión), mientras que materiales ácidos
no sólo retardan sino pueden evitar del todo la adhesión. En cualquiera de estos
casos se pueden usar procedimientos para neutralizar el pH de la superficie. Las
tablas 1 y 2 dan más información acerca del tiempo requerido para adhesión
completa y para hacer mediciones confiables, respectivamente. Un secado y
adhesión definitivo sucede hasta 24 horas después.
(Ver tabla 6)

135
Tabla 6. Tiempos mínimos para adhesión. Material Tiempo de secado Acero 60 a 120 seg.
Aluminio 50 a 1000 seg.
Plásticos 10 a 60 seg.
Tabla 2. Tiempos mínimos de curado previo a la medición. Tipo de medición Tiempo de curado a 5°C a 20°C
Dinámica 90 min. 10 min.
Estática 120 min. 15 min.
Preparación de la superficie. El objetivo de la preparación del material es crear una superficie limpia, libre de
imperfecciones físicas mayores y químicamente apropiada.
Limpieza burda. Se debe eliminar todo tipo de pintura, corrosión, oxidación o
cualquier otro contaminante que pueda haber para el área de adhesión (más un
área de tolerancia) de las galgas.
Suavizar la superficie. Cualquier tipo de protuberancia, canales, o imperfección
mecánica debe ser eliminada por un proceso de pulido, limado, cepillado o lo que
sea necesario para el caso.
Eliminar grasas. Este procedimiento se requiere para eliminar todo tipo de
aceites, grasas, contaminantes orgánicos y residuos de productos químicos
solubles. La elección del agente de limpieza depende de la naturaleza del
contaminante y si la superficie puede ser deteriorada por el limpiador. Entre las
opciones más comunes están el tolueno, acetona, alcohol isopropílico,

136
desengrasante en aerosol, baños líquidos agitados ultrasónicamente, métodos
desengrasantes por vapor, triclorietileno y otras sustancias químicas más
especializadas. Para áreas grandes usar primero un polvo limpiador abrasivo
como AJAX en polvo.
Habiendo hecho esto, se debe enjuagar la superficie con agua de tal manera que
al terminar se deje una capa continua de sólo agua sobre la superficie. Ésta se
debe secar con papel o con calor. El procedimiento de limpieza consiste en
empapar una gasa en el agente limpiador y lavar la superficie cubriendo
inicialmente un área mayor a la deseada.
Notas importantes:
• El agente limpiador debe estar químicamente limpio y no debe dejar
residuos.
• Nunca usar el agente limpiador directamente del recipiente donde se
almacena. Una cantidad adecuada debe traspasarse a un recipiente limpio
del cual se usará.
• Cada gasa usada debe ser desechada y nunca introducirla en el recipiente
con el agente limpiador.
• Porciones del agente limpiador sin usarse deben desecharse
• El área a limpiar debe ser bien delimitada y avanzar progresivamente en
esa zona hasta cubrirla completamente sin regresar a limpiar nuevamente
para evitar introducir nuevas partículas sucias a la zona limpia.
Lijado. La adhesión entre dos superficies depende del área de las superficies que
se cubre con el adhesivo. Un buen pulido fino de las superficies aumenta la
adhesión porque aumenta el área de contacto efectiva. Pera lijar la superficie se

137
debe tomar en cuenta que sea un papel de lija apropiado para el material y de un
grado adecuado. Para acero se usa un grado 80 a 180 y para aluminio un grado
220 a 360. Para evitar hacer canales en el material este procedimiento debe
hacerse en movimientos circulares y de preferencia usando primero un papel de
lija más grueso y después uno más fino.
Limpieza fina. Cualquier residuo de lija, material o polvo generado en el proceso
anterior debe ser eliminado cuidadosamente. Se pueden usar los mismos métodos
usados en el punto 2.3. Tome cada gasa empapada con pinzas de punta finas o
'tweezers' y pásela por la superficie una sola vez. Este procedimiento debe ser
repetido una y otra vez hasta que la gasa no muestre señas de decoloración al
pasarla por la superficie. La superficie debe dejarse seca y libre de residuos de
gasa.
Debe cuidar no soplar o respirar cerca de la superficie y evitar tocarla.
Marcar la superficie. La superficie del espécimen donde se van a aplicar las
galgas debe marcarse ligeramente para poder alinear las galgas según la
deformación que se desea medir. Utilícese un lápiz 4H para aluminio y un bolígrafo
para acero para hacer unas ligeras marcas en la periferia del lugar de aplicación
de las galgas. Tenga presente que las galgas contienen también señales de
alineación.
Alcalinidad óptima. Si es el caso, la superficie debe ser tratada para poner su
valor de alcalinidad de 7 a 7.5 pH. Se aplica un neutralizador líquido libremente
sobre la superficie limpia, se talla y seca con gasa o con palillos con punta de
algodón. Tallar y secar debe hacerse siempre en una sola dirección y sin reusar el
algodón o gasa.

138
Si los procedimientos anteriores se han seguido con atención y cuidado, la
superficie esta ya lista para que las galgas se adhieran. A partir de este momento
las galgas deben ser adheridas tan pronto sea posible para minimizar
contaminación.
Adhesión de las galgas. Posicionamiento de la galga. Tome la galga con unas pinzas finas y colóquela
en una superficie químicamente limpia con la superficie de adhesión hacia abajo.
Si va a usar terminales para soldar se recomienda colocarlas a 1.6 mm del límite
de la galga y alineadas en el centro.
Tome un pedazo de cinta adhesiva de unos 10 ó 15 cm de largo y póngala sobre
la galga y terminal de tal manera que queden centradas en la cinta. Levante la
cinta cuidadosamente en un ángulo de aprox. 45º de la superficie, trayendo
consigo la galga y terminal adheridas, como lo muestra la figura 33.

139
Figura 33. Galga y Terminal adheridas a la cinta.
Alineación de la galga. Posicione la cinta con la galga y terminal en el espécimen
de tal manera que las marcas de alineación coincidan con las marcas del
espécimen y pegue firmemente un extremo de la cinta como se muestra en la
figura 34. Si la alineación no coincidiera a satisfacción, levante la cinta de un
extremo manteniendo un ángulo igual o menor a 45º hasta despegar la cinta
completamente. Repita el procedimiento de alineación hasta quedar satisfecho.
Para técnicos principiantes se recomienda usar cinta adhesiva especializada para
estas aplicaciones ya que ésta no deja residuos de adhesivo cuando se despega.

140
Figura 34. Galga y terminal alineadas en la estructura.
Preparación final. Levante la cinta con la galga en un ángulo agudo (figura 35)
hasta que la terminal quede aproximadamente 1 cm libre. Doble la cinta sobre si
misma y pegue el otro extremo sobre la superficie del espécimen de tal manera
que la galga y terminal queden expuestas en una superficie plana con la parte a
adherirse hacia arriba (figura 36).
Nota 1: Se deben revisar las especificaciones del fabricante para saber si la galga
misma requiere de limpieza en la superficie de adhesión. Si la galga ha sido
contaminada entonces debe ser limpiada con algodón y un neutralizador.
Nota 2: Algunos adhesivos requieren que se le aplique a la galga un catalizador
para que el adhesivo tome mejor efecto.
Nota 3: Los siguientes tres pasos deben ser realizados en la secuencia mostrada
y en un lapso de 3 a 5 segundos. Lea y memorice estos pasos antes de iniciar el
procedimiento.

141
Figura 35. Levantar la cinta en un ángulo agudo.
Figura 36. Posicionar la cinta para que la parte de debajo de la galga quede
expuesta.
Aplicación del adhesivo. Levante la cinta del lado que ha sido doblada sobre si
misma. Tomando la cinta sin jalar ni doblar.
Aplique una o dos gotas de adhesivo en la unión de la cinta con el espécimen a
aproximadamente 1 cm. de la periferia de la galga con terminal (figura 37). Esto
permite que la polimerización instantánea del adhesivo al contacto con el
espécimen no provoque imperfecciones en la homogeneidad y uniformidad de la
película de adhesivo.

142
Figura 37. Aplicación del Adhesivo
Adhesión. Inmediatamente desdoble la cinta para quedar a aproximadamente 30º
de la superficie del espécimen con la galga y terminal haciendo un 'puente' sobre
el lugar de instalación. Mientras se sostiene la cinta con una ligera tensión, aplique
una presión deslizante con sus dedos y un pedazo de gasa que vaya oprimiendo
la galga y terminal sobre su posición y alineación deseadas (38). Use una presión
firme al
'recostar' la galga sobre su posición ya que se requiere una película muy delgada y
uniforme de adhesivo para resultados óptimos.
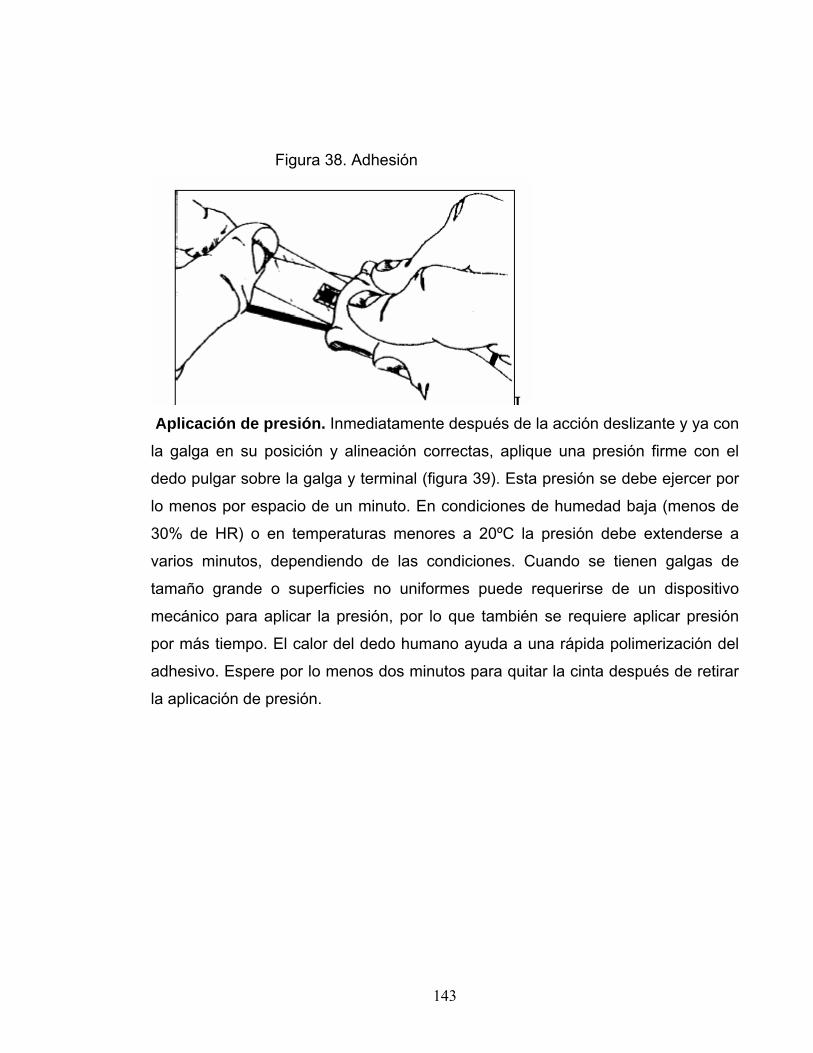
143
Figura 38. Adhesión
Aplicación de presión. Inmediatamente después de la acción deslizante y ya con
la galga en su posición y alineación correctas, aplique una presión firme con el
dedo pulgar sobre la galga y terminal (figura 39). Esta presión se debe ejercer por
lo menos por espacio de un minuto. En condiciones de humedad baja (menos de
30% de HR) o en temperaturas menores a 20ºC la presión debe extenderse a
varios minutos, dependiendo de las condiciones. Cuando se tienen galgas de
tamaño grande o superficies no uniformes puede requerirse de un dispositivo
mecánico para aplicar la presión, por lo que también se requiere aplicar presión
por más tiempo. El calor del dedo humano ayuda a una rápida polimerización del
adhesivo. Espere por lo menos dos minutos para quitar la cinta después de retirar
la aplicación de presión.

144
Figura 39. Aplicación de Presión.
Retirar la cinta. La galga y terminal ya deben estar firmemente adheridas al
espécimen. Para retirar la cinta, jálela directamente sobre sí misma de forma
continua y lenta para evitar ejercer fuerzas innecesarias sobre la galga.
Realmente no es necesario retirar la cinta inmediatamente después de la
instalación y puede permanecer como protección mecánica hasta que se vaya a
proceder a soldar.8
8 Dr Ing. Raúl R. Leal Ascencio. M. ITESO.

145
Figura. 40. cómo retirar la cinta.
Al momento de la instalación del dispositivo se debe tener en cuenta:
Buen aislamiento tanto térmico como electromagnético del dispositivo y del
cableado.
Protección hacia los otros equipos.
Voltajes bien regulados.
La galga debe ser conectada a una distancia máxima de 40 cm.

146
BIBLIOGRAFÍA
Coquet Eduardo. El Bus I2C [artículo de internet]. http:
www.comunidadelectronicos.com. [Consulta: 15 de septiembre del 2005].
Coughlin Robert F, Driscoll Frederick F. Amplificadores Operacionales y circuitos
integrados lineales: Amplificadores diferenciales, de instrumentación y de puente.
5 edición. México; 1999. Págs. 215-239.
Dally, James W. and Riley, William F. Experimental Stress Analysis. 2nd ed.
McGraww-Hill, 1987. Especialmente, Chapter six 'Electrical-resistance strain
gages'.pags. 153-203.
Dr. Ing. Leal Ascencio Raúl R. Iteso: Área Curricular de instrumentación. 2005.
Embedded Control Handbook, Microchip. 1999
Measurements Group, Inc. P.O. Box 27777, Raleigh, NC 27611, USA. Información
en internet, http://www.measurementsgroup.com/mg.htm
PIC 16/17 microcontroller data Book, Microchip. 1999. Capítulos 1,2,9,11,15.
SG401 and SG496, Rapid Cure Strain Gauge Adhesives. Opertor's manual.
OMEGA, One Omega Drive, Box 4047, Stamforf, CT 06907-0047, USA.
147
ANEXOS
Anexo1. Normatividad FAA.
Advisory Circular Information AC Number: AC 43.13-2A
Date: 01/01/77
Change Description: Subject: [Large AC] Acceptable Methods, Techniques, and Prácticas - Aircraft Alterations Related Regulation(s): Unknown Part
Section Number(s): Unknown Section
Cancels: Initiating Office:
AFS-830, AFS-580
Ésta normatividad se encuentra consignada en 3 archivos PDF, los cuales serán
incluidos en un CD-ROM, debido a que esta norma es muy extensa.
Contents.pdf
Chapter 1-8.pdf
Chapter 9-13.pdf

148
Anexo 2. Presupuesto
PRESUPUESTO
PARTES ELECTRÓNICAS Cantidad v/r unitario total moneda accesorios de caja 1 20000 20000 Pesos amplificadores de instrumentación 12 30000 360000 Pesos Amplificadores Lm324 12 1700 20400 Pesos Borneras 40 1000 40000 Pesos cable multipar (Mt) 20 1000 20000 Pesos cable serial db9 1 65000 65000 Pesos cajas de presentación 14 4000 56000 Pesos camillas o portaintegrados 36 800 28800 Pesos cinta ribbon (Mt) 10 7000 70000 Pesos circuitos impreso en fibra de vidrio 16 18000 288000 Pesos Condensadores 40 100 4000 Pesos Conectores 8 1500 12000 Pesos conectores db9 2 1000 2000 Pesos Conversor puerto usb-serial 1 45000 45000 Pesos cristales 20Mhz 4 6000 24000 Pesos Dipswitch 4 1500 6000 Pesos Galgas Extensiometricas 60 18400 1104000 Pesos Internet 200 horas 1500 300000 Pesos Leds 4 100 400 Pesos Max 232 4 2000 8000 Pesos memoria 24lc256 4 6000 24000 Pesos microcontroladores pic 16f876a 4 17000 68000 Pesos Pruebas máquina universal de ensayos 1 80000 80000 Pesos Resistencias 100 50 5000 Pesos Trimmer 12 2000 24000 Pesos subtotal parte electrónica 2674600 Pesos
OTROS varios(papelería) 1 150000 150000 Pesos Libros 150000 150000 Pesos Fotocopias 100000 100000 Pesos Recursos tecnológicos (computador portátil, cámara digital) 3900000 3900000 Pesos Transporte terrestre 600000 600000 Pesos subtotal otros 4900000 Pesos Total coste del proyecto 7574600 Pesos
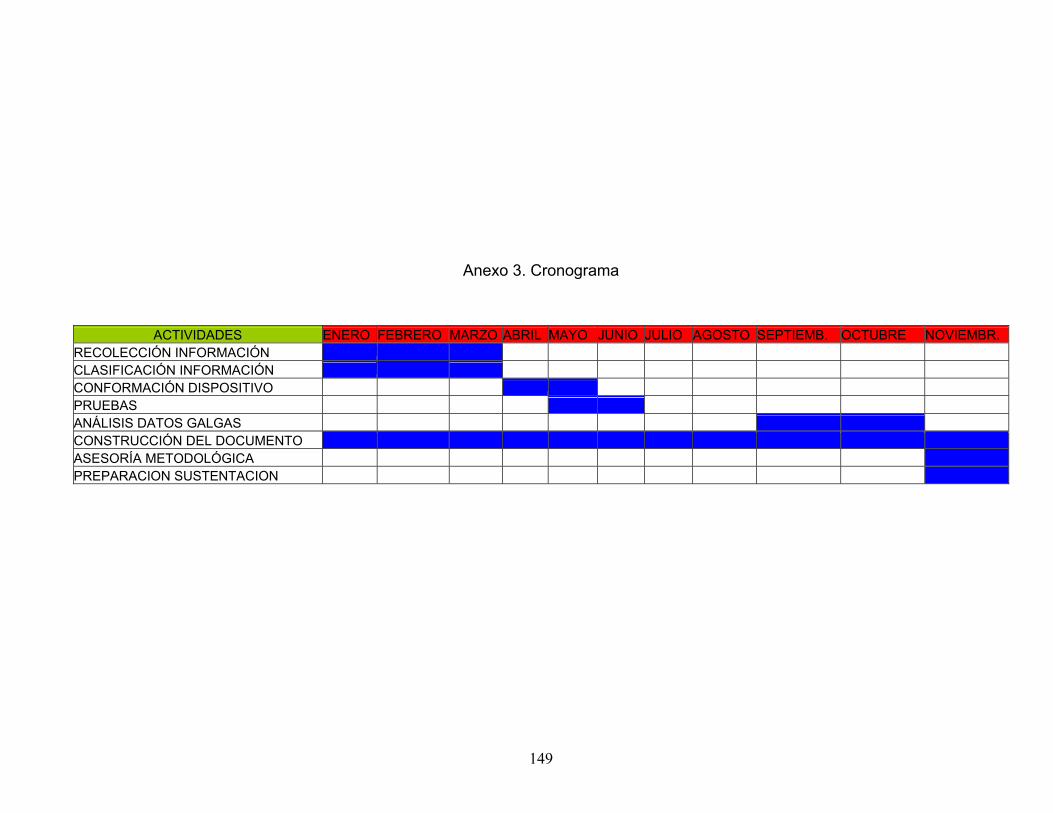
149
Anexo 3. Cronograma
ACTIVIDADES ENERO FEBRERO MARZO ABRIL MAYO JUNIO JULIO AGOSTO SEPTIEMB. OCTUBRE NOVIEMBR.
RECOLECCIÓN INFORMACIÓN CLASIFICACIÓN INFORMACIÓN CONFORMACIÓN DISPOSITIVO PRUEBAS ANÁLISIS DATOS GALGAS CONSTRUCCIÓN DEL DOCUMENTO ASESORÍA METODOLÓGICA PREPARACION SUSTENTACION

150
ANEXO 4. TABLA DE CALIBRACIÓN
La tabla de calibración se realizó de tal forma que se proporcionara un valor para
cada voltaje convertido en un número digital en su equivalente en KN (kilo
Newton).
Conversion(0) = -26.497
Conversion(1) = -26.485
Conversion(2) = -26.479
Conversion(3) = -26.474
Conversion(4) = -26.468
Conversion(5) = -26.463
Conversion(6) = -26.457
Conversion(7) = -26.452
Conversion(8) = -26.446
Conversion(9) = -26.44
Conversion(10) = -26.435
Conversion(11) = -26.429
Conversion(12) = -26.424
Conversion(13) = -26.418
Conversion(14) = -26.413
Conversion(15) = -26.407
Conversion(16) = -26.402
Conversion(17) = -26.352
Conversion(18) = -26.279
Conversion(19) = -26.206
Conversion(20) = -26.133

151
Conversion(21) = -26.061
Conversion(22) = -25.988
Conversion(23) = -25.915
Conversion(24) = -25.452
Conversion(25) = -24.268
Conversion(26) = -24.054
Conversion(27) = -23.749
Conversion(28) = -23.444
Conversion(29) = -23.14
Conversion(30) = -22.835
Conversion(31) = -22.53
Conversion(32) = -22.226
Conversion(33) = -21.493
Conversion(34) = -20.684
Conversion(35) = -19.875
Conversion(36) = -19.066
Conversion(37) = -18.781
Conversion(38) = -18.654
Conversion(39) = -18.526
Conversion(40) = -18.398
Conversion(41) = -18.271
Conversion(42) = -18.143
Conversion(43) = -18.015
Conversion(44) = -17.888
Conversion(45) = -17.76
Conversion(46) = -17.632
Conversion(47) = -17.504
Conversion(48) = -17.377

152
Conversion(49) = -17.249
Conversion(50) = -17.121
Conversion(51) = -16.993
Conversion(52) = -16.866
Conversion(53) = -16.738
Conversion(54) = -16.61
Conversion(55) = -15.946
Conversion(56) = -15.235
Conversion(57) = -13.407
Conversion(58) = -12.063
Conversion(59) = -10.823
Conversion(60) = -10.419
Conversion(61) = -10.199
Conversion(62) = -9.819
Conversion(63) = -9.239
Conversion(64) = -8.193
Conversion(65) = -7.238
Conversion(66) = -6.717
Conversion(67) = -6.71
Conversion(68) = -6.625
Conversion(69) = -6.578
Conversion(70) = -6.532
Conversion(71) = -6.485
Conversion(72) = -6.439
Conversion(73) = -6.392
Conversion(74) = -6.346
Conversion(75) = -6.299
Conversion(76) = -6.239

153
Conversion(77) = -6.178
Conversion(78) = -6.118
Conversion(79) = -6.057
Conversion(80) = -5.996
Conversion(81) = -5.931
Conversion(82) = -5.911
Conversion(83) = -5.891
Conversion(84) = -5.87
Conversion(85) = -5.85
Conversion(86) = -5.829
Conversion(87) = -5.609
Conversion(88) = -5.789
Conversion(89) = -5.768
Conversion(90) = -5.748
Conversion(91) = -5.728
Conversion(92) = -5.706
Conversion(93) = -5.669
Conversion(94) = -5.676
Conversion(95) = -5.661
Conversion(96) = -5.646
Conversion(97) = -5.632
Conversion(98) = -5.617
Conversion(99) = -5.602
Conversion(100) = -5.587
Conversion(101) = -5.573
Conversion(102) = -5.558
Conversion(103) = -5.535
Conversion(104) = -5.503

154
Conversion(105) = -5.547
Conversion(106) = -5.437
Conversion(107) = -5.405
Conversion(108) = -5.363
Conversion(109) = -5.32
Conversion(110) = -5.277
Conversion(111) = -5.233
Conversion(112) = -5.19
Conversion(113) = -5.053
Conversion(114) = -4.887
Conversion(115) = -4.84
Conversion(116) = -4.84
Conversion(117) = -4.84
Conversion(118) = -4.84
Conversion(119) = -4.84
Conversion(120) = -4.84
Conversion(121) = -4.84
Conversion(122) = -4.829
Conversion(123) = -4.809
Conversion(124) = -4.787
Conversion(125) = -4.787
Conversion(126) = -4.766
Conversion(127) = -4.766
Conversion(255) = 26.497
Conversion(254) = 26.485

155
Conversion(253) = 26.479
Conversion(252) = 26.474
Conversion(251) = 26.468
Conversion(250) = 26.463
Conversion(249) = 26.457
Conversion(248) = 26.452
Conversion(247) = 26.446
Conversion(246) = 26.44
Conversion(245) = 26.435
Conversion(244) = 26.429
Conversion(243) = 26.424
Conversion(242) = 26.418
Conversion(241) = 26.413
Conversion(240) = 26.407
Conversion(239) = 26.402
Conversion(238) = 26.352
Conversion(237) = 26.279
Conversion(236) = 26.206
Conversion(235) = 26.133
Conversion(234) = 26.061
Conversion(233) = 25.988
Conversion(232) = 25.915
Conversion(231) = 25.452
Conversion(230) = 24.268
Conversion(229) = 24.054
Conversion(228) = 23.749
Conversion(227) = 23.444
Conversion(226) = 23.14

156
Conversion(225) = 22.835
Conversion(224) = 22.53
Conversion(223) = 22.226
Conversion(222) = 21.493
Conversion(221) = 20.684
Conversion(220) = 19.875
Conversion(219) = 19.066
Conversion(218) = 18.781
Conversion(217) = 18.654
Conversion(216) = 18.526
Conversion(215) = 18.398
Conversion(214) = 18.271
Conversion(213) = 18.143
Conversion(212) = 18.015
Conversion(211) = 17.888
Conversion(210) = 17.76
Conversion(209) = 17.632
Conversion(208) = 17.504
Conversion(207) = 17.377
Conversion(206) = 17.249
Conversion(205) = 17.121
Conversion(204) = 16.993
Conversion(203) = 16.866
Conversion(202) = 16.738
Conversion(201) = 16.61
Conversion(200) = 15.946
Conversion(199) = 15.235
Conversion(198) = 13.407

157
Conversion(197) = 12.063
Conversion(196) = 10.823
Conversion(195) = 10.419
Conversion(194) = 10.199
Conversion(193) = 9.819
Conversion(192) = 9.239
Conversion(191) = 8.193
Conversion(190) = 7.238
Conversion(189) = 6.717
Conversion(188) = 6.71
Conversion(187) = 6.625
Conversion(186) = 6.578
Conversion(185) = 6.532
Conversion(184) = 6.485
Conversion(183) = 6.439
Conversion(182) = 6.392
Conversion(181) = 6.346
Conversion(180) = 6.299
Conversion(179) = 6.239
Conversion(178) = 6.178
Conversion(177) = 6.118
Conversion(176) = 6.057
Conversion(175) = 5.996
Conversion(174) = 5.931
Conversion(173) = 5.911
Conversion(172) = 5.891
Conversion(171) = 5.87
Conversion(170) = 5.85
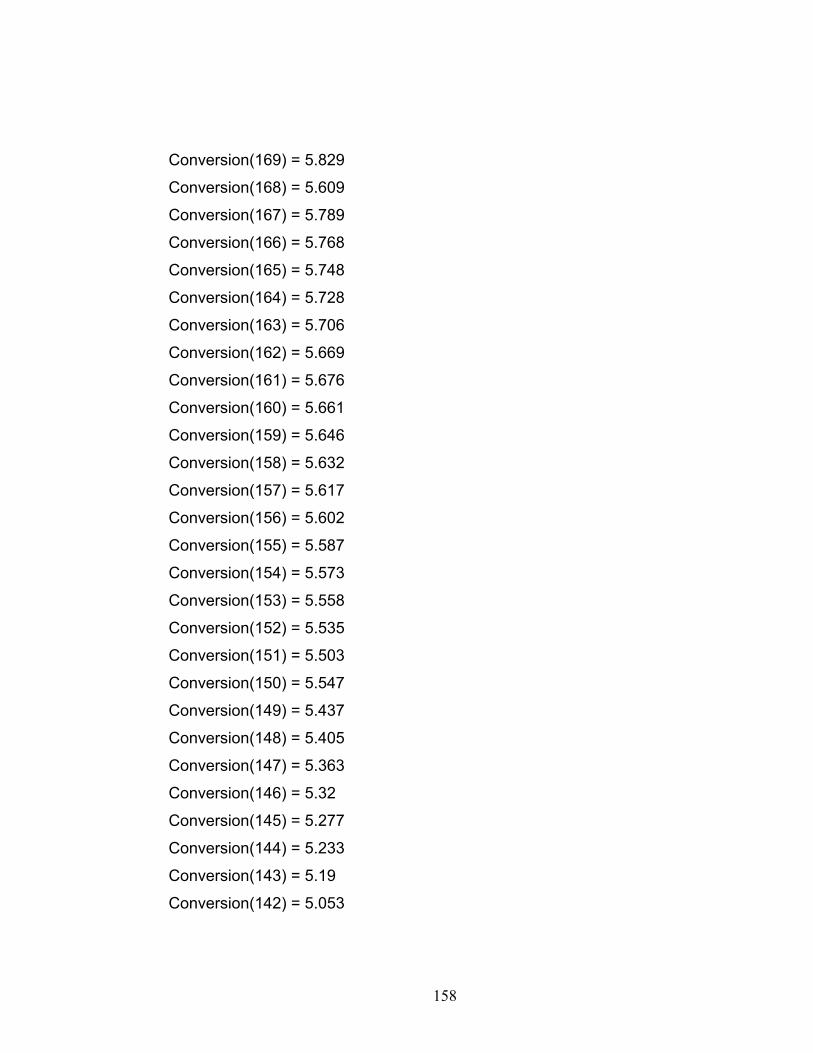
158
Conversion(169) = 5.829
Conversion(168) = 5.609
Conversion(167) = 5.789
Conversion(166) = 5.768
Conversion(165) = 5.748
Conversion(164) = 5.728
Conversion(163) = 5.706
Conversion(162) = 5.669
Conversion(161) = 5.676
Conversion(160) = 5.661
Conversion(159) = 5.646
Conversion(158) = 5.632
Conversion(157) = 5.617
Conversion(156) = 5.602
Conversion(155) = 5.587
Conversion(154) = 5.573
Conversion(153) = 5.558
Conversion(152) = 5.535
Conversion(151) = 5.503
Conversion(150) = 5.547
Conversion(149) = 5.437
Conversion(148) = 5.405
Conversion(147) = 5.363
Conversion(146) = 5.32
Conversion(145) = 5.277
Conversion(144) = 5.233
Conversion(143) = 5.19
Conversion(142) = 5.053

159
Conversion(141) = 4.887
Conversion(140) = 4.84
Conversion(139) = 4.84
Conversion(138) = 4.84
Conversion(137) = 4.84
Conversion(136) = 4.84
Conversion(135) = 4.84
Conversion(134) = 4.84
Conversion(133) = 4.829
Conversion(132) = 4.809
Conversion(131) = 4.787
Conversion(130) = 4.787
Conversion(129) = 4.766
Conversion(128) = 4.766
160
ANEXO 5. MANUAL DAQ
El DAQ es un sistema de adquisición de datos diseñado especialmente para
sensar las deformaciones en cualquier tipo de estructuras. Éste sistema consta de
2 tarjetas de adquisición y 12 acondicionadores de señal.
Cada tarjeta de adquisición consta de:
6 canales de conversión Análoga digital.
Modo de muestreo y modo de comunicación serial
Memoria con capacidad para muestrear 32000 datos
Circuito redundante de la tarjeta de adquisición para evitar pérdida de datos.

161
Cada canal de conversión Análoga digital posee su acondicionador de señal
independiente. Dicho acondicionador nos da la posibilidad de tener una medida
exacta y confiable para la lectura de los esfuerzos estructurales.
Medidas:
Tarjeta DAQ
Ancho: 8.1 Cms
Alto: 5.7 Cms
Largo: 10 Cms
Peso:
Acondicionador de Señal
Ancho: 6 Cms
Alto: 3.2 Cms
Largo: 9 Cms
Peso:
Requerimientos mínimos para el funcionamiento:
Fuente DC 5V – 2 A
PC
Puerto Serial Rs 232
Microsoft Excel versión 97 o superior
128 Mb en Ram

162
10 Mb Libres en el Disco Duro.
El sistema necesita ser conectado a una fuente de 5Vdc – 2 A Para su
funcionamiento.
Funcionamiento:
Después de conectar los acondicionadores a la tarjeta Daq, y posicionados los
sensores de deformación sobre la estructura que se desea medir tendremos listo
el sistema para empezar el muestreo.
Para el muestreo debemos posicionar los interruptores (dipswitch) en 0 para que
así el sistema empiece la recopilación de los datos, sabremos que se esta
muestreando correctamente porque el led empezará a parpadear..
Al momento de la descarga:
Conectar el puerto Rs-232 de la tarjeta al Pc y posicionar los interruptores de una
forma
0 – 1 respectivamente para proceder a su descarga.
Correr el programa de Visual Basic Datos.exe.
Tener en cuenta que previamente se debió crear un archivo en la misma ubicación
de Datos.exe, con nombre Datos.xls.
En la interfaz encontraremos algunos pantallazos que se mostrarán a
continuación.
Sabremos que se están descargando los datos correctamente porque el led
quedara encendido hasta que lo cambiemos de estado.

163
Este es el pantallazo inicial del programa.

164
Al momento de poner los switches en posición de descarga y pulsar la opción de
descargar se verá la pantalla anterior, indicándonos que la descarga finalizó
correctamente.

165
En esta pantalla se tendrá la opción de mostrar la grafica de los 6 sensores de
deformación o si se quiere también se puede hacer individual.





























