Embed Size (px)
Citation preview

Discrete-time first-order systems 1
Start with the continuous-time system Zero-order hold input
u(t) is held constant for the sample period T Solution
y(t) = ay(t) + bu(t), y(0)
y(t) = eaty(0) +
Z t
0ea(t�⌧)bu(⌧) d⌧
y(T ) = eaT y(0) +
Z T
0ea(T�⌧)b d⌧ u(0)
y(T ) = Ay(0) +Bu(0)
A = eaT , B =
Z T
0ea(T�⇥)b d⇥ =
Z T
0ea�b d�
� = T � ⌧, d� = �d⌧
⌧ = 0, � = T
⌧ = T, � = 0
u(t) = u(nT ), nT t < (n+ 1)T
MAE143A Signals & Systems Winter 2016

Discrete-time first-order systems II
MAE143A Signals & Systems Winter 2016
2
Sampled values of zero-order-held continuous-time system General update of samples
This is a first-order difference equation Solution
y(T ) = Ay(0) +Bu(0)
y[1] = Ay[0] +Bu[0]A = eaT , B =
Z T
0ea� b d�
y[n+ 1] = Ay[n] +Bu[n]
y[1] = Ay[0] +Bu[0]
y[2] = Ay[1] +Bu[1] = A2y[0] +ABu[0] +Bu[1]
y[3] = Ay[2] +Bu[2] = A3y[0] +A2Bu[0] +ABu[1] +Bu[2]
... =...
y[n] = Any[0] +n�1X
k=0
An�k�1Bu[k] Easy!!

Discrete-time higher-order systems
MAE143A Signals & Systems Winter 2016
3
Second-order system (Example 2.6, p. 60)
Initial conditions input Solution
y[�2] = 2, y[�1] = 1
y[n]� 1.5y[n� 1] + y[n� 2] = 2u[n� 2]
u[n] = 1[n]
y[n] = 1.5y[n� 1]� y[n� 2] + 2u[n� 2]
y[0] = 1.5y[�1]� y[�2] + 2u[�2]
= 1.5⇥ 1� 1⇥ 2 + 2⇥ 0 = �0.5
y[1] = 1.5y[0]� y[�1] + 2u[�1]
= 1.5⇥ (�0.5)� 1⇥ 1 + 2⇥ 0 = �1.75
y[2] = 1.5y[1]� y[0] + 2u[0]
= 1.5⇥ (�1.75)� 1⇥ (�0.5) + 2⇥ 1 = �.125
y[3] = 1.5y[2]� y[1] + 2u[1]
= 1.5⇥ (�0.125)� 1⇥ (�1.75) + 2⇥ 1 = 3.5625

Higher-order discrete-time systems
MAE143A Signals & Systems Winter 2016
4
Nth-order linear system
Solution via the recursion/substitution Easy to program
Clearly we need N initial conditions y[-1], …, y[-N] The solution consists of two parts
that due to initial conditions only – zero-input response that due to the input only – zero-state response
y[n] + a1y[n� 1] + a2y[n� 2] + · · ·+ aNy[n�N ] = b0u[n] + b1u[n� 1] + · · ·+ bMu[n�M ]
y[n] = �a1y[n� 1]� a2y[n� 2]� · · ·� aNy[n�N ]
+b0u[n] + b1u[n� 1] + · · ·+ bMu[n�M ]

Discrete impulse response, convolution
MAE143A Signals & Systems Winter 2016
5
Discrete impulse signal Zero initial conditions
Output is the impulse response
General inputs Response to is Response to is
y[n] = h[n]
u[n] =1X
k=�1uk�[k � n]
uk�[k � n] ukh[k � n]
u[n]1X
k=�1ukh[k � n]
4= u[n] ⇤ h[n] Discrete
Convolution
�[n] =
(1, if n = 0
0, else

Discrete step response
MAE143A Signals & Systems Winter 2016
6
Discrete step function Relationship with discrete impulse Step response is the ‘integral’ of the impulse response
1[n] =nX
k=�1�[k]
s[n] = 1[n] ⇤ h[n] =1X
k=�11[n� k]h[k] =
(Pnk=0 h[k], n � 0
0, else
1[n] =
(1, if n � 0
0, else

Z-transforms
MAE143A Signals & Systems Winter 2016
7
Start by considering the Laplace transform of a one-sided sampled-data signal
Define then This is the z-transform of the sequence {x[n]}
It is analogous to the Laplace transform in continuous time But it is much easier to work with
L [xs(t)] =
Z 1
0�xs(t)e
�stdt =
Z 1
0�e
�st1X
n=0
xn�(t� nT ) dt
=1X
n=0
xne�snT
z = esT Z (x[n]) = X(z)4=
1X
n=0
x[n]z�n
Some z-transforms
MAE143A Signals & Systems Winter 2016
8
Discrete impulse sequence Delayed impulse General delayed signal
Multiplication of the z-transform by z-1 is a delay operation by one sample time We can extend the z-transform to two-sided signals easily
There is still a convergence question
Z (�[n]) =1X
n=0
�[n]z�n = 1
Z (�[n� k]) =1X
n=0
�[n� k]z�n = z�k
Z (x[n� k]) =1X
n=k
x[n� k]z�n =1X
m=0
x[m]z�m�k = z
�kX(z)
Z-transform of a discrete step
MAE143A Signals & Systems Winter 2016
9
This uses the geometric series formula It converges if
We can extend this to a geometric series
This converges if
Z (1[n]) =1X
n=0
1z�n = 1 + z�1 + z�2 + · · · = 1
1� z�1=
z
z � 1
x[n] = a
n1[n]
Z(an1[n]) =1X
k=0
anz�n =1
1� az�1=
z
z � a
|z| > 1
|z| > |a|
Z-transform and convolution
MAE143A Signals & Systems Winter 2016
10
Z(x[n] ⇤ v[n]) =1X
n=0
1X
k=0
x[k]v[n� k]z�n
=1X
n=0
1X
k=0
x[k]z�kv[n� k]z�(n�k)
=1X
k=0
x[k]z�k1X
m=�k
v[m]z�m
=1X
k=0
x[k]z�k1X
m=0
v[m]z�m = X(z)V (z)
Z(x[n] ⇤ v[n]) = X(z)V (z)
Z-transforms
MAE143A Signals & Systems Winter 2016
11
Recall the relationship between Laplace and Z-transforms Laplace transforms of signal which decay have poles in Z-transforms of sequences which decay have poles in
Recall the first-order sampled system
Its discrete variant was
with
The continuous mode/pole is at s=a The discrete mode/pole is at z=A=eaT
Note that for any T>0
z = esT
Re(s) < 0
|z| < 1
y(t) = ay(t) + bu(t), y(0)
A = eaT , B =
Z T
0ea� b d�
y[n+ 1] = Ay[n] +Bu[n]
|eaT | < 1 , Re(a) < 0
Z-transforms and delays
MAE143A Signals & Systems Winter 2016
12
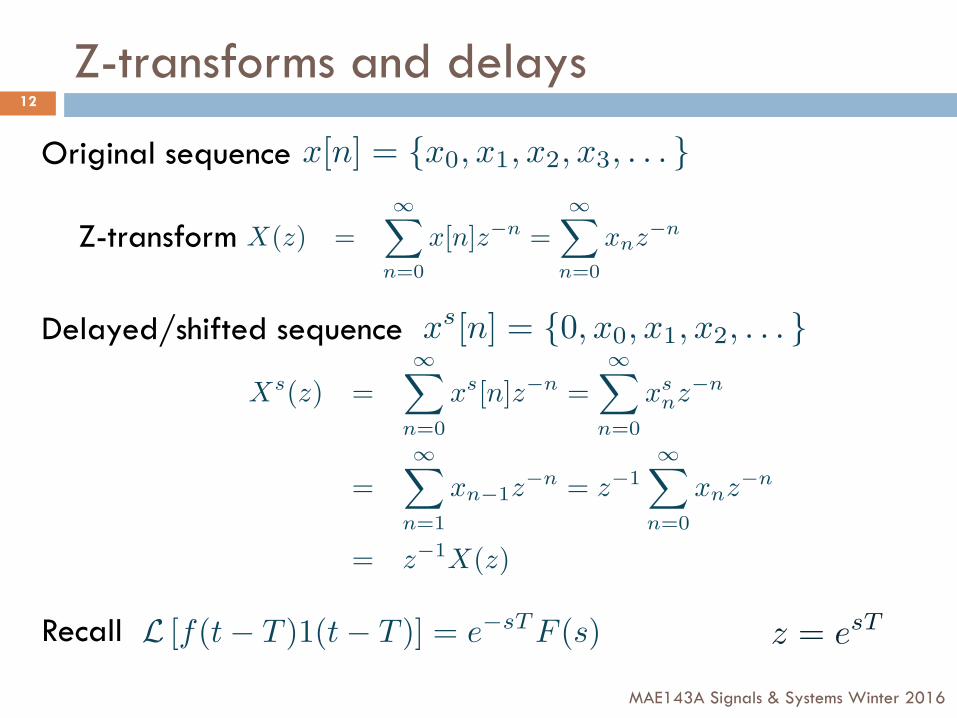
Original sequence
Z-transform
Delayed/shifted sequence
Recall
x[n] = {x0, x1, x2, x3, . . . }
x
s[n] = {0, x0, x1, x2, . . . }
X
s(z) =1X
n=0
x
s[n]z�n =1X
n=0
x
snz
�n
=1X
n=1
xn�1z�n = z
�11X
n=0
xnz
�n
= z
�1X(z)
X(z) =1X
n=0
x[n]z�n =1X
n=0
xnz
�n
L [f(t� T )1(t� T )] = e�sT F (s) z = esT

Discrete system transfer functions
MAE143A Signals & Systems Winter 2016
13
Example ODE
Solve by recursion with initial conditions Let’s take the z-transform
Denote the solution z-t by and the input z-t by
A discrete transfer function The initial conditions get mixed in at recursion
y[n] + 0.1y[n� 1]� 0.72y[n� 2] = 0.1u[n� 1] + 0.9u[n� 2]
y[n] = �0.1y[n� 1] + 0.72y[n� 2] + 0.1u[n� 1] + 0.9u[n� 2]
U(z)Y (z)
1X
n=0
y[n]z�n = �0.11X
n=0
y[n� 1]z�n + 0.721X
n=0
y[n� 2]z�n + 0.11X
n=0
u[n� 1]z�n + 0.91X
n=0
u[n� 2]z�n
Y (z) = �0.1z�1Y (z) + 0.72z�2Y (z) + 0.1z�1U(z) + 0.9z�2U(z)Y (z) + 0.1z�1Y (z)� 0.72z�2Y (z) = 0.1z�1U(z) + 0.9z�2U(z)
Y (z) =0.1z�1 + 0.9z�2
1 + 0.1z�1 � 0.72z�2U(z)
MAE143a Signals & Systems Winter 2005 109
Discrete impulse response - by hand
Impulse response: zero i.c.s, un=!n
!
yn + .1yn"1 " 0.72yn"2 = .1un"1 + .9un"2
!
y0 = "0.1# y"1 + 0.72 # y"2 + 0.1# u"1 + 0.9 # u"2= "0.1# 0 + 0.72 # 0 + 0.1# 0 + 0.9 # 0= 0
!
y1 = "0.1# y0 + 0.72 # y"1 + 0.1# u0 + 0.9 # u"1= "0.1# 0 + 0.72 # 0 + 0.1#1 + 0.9 # 0= 0.1
!
y2 = "0.1# y1 + 0.72 # y0 + 0.1# u1 + 0.9 # u0= "0.1# 0.1 + 0.72 # 0 + 0.1# 0 + 0.9 #1= 0.89
!
y3 = "0.1# y2 + 0.72 # y1 + 0.1# u2 + 0.9 # u1= "0.1# 0.89 + 0.72 # 0.1 + 0.1# 0 + 0.9 # 0= "0.017
!
y4 = "0.1# y3 + 0.72 # y2 + 0.1# u3 + 0.9 # u2= "0.1#"0.017 + 0.72 # 0.89 + 0.1# 0 + 0.9 # 0= 0.6425
Discrete impulse response
MAE143A Signals & Systems Winter 2016
14
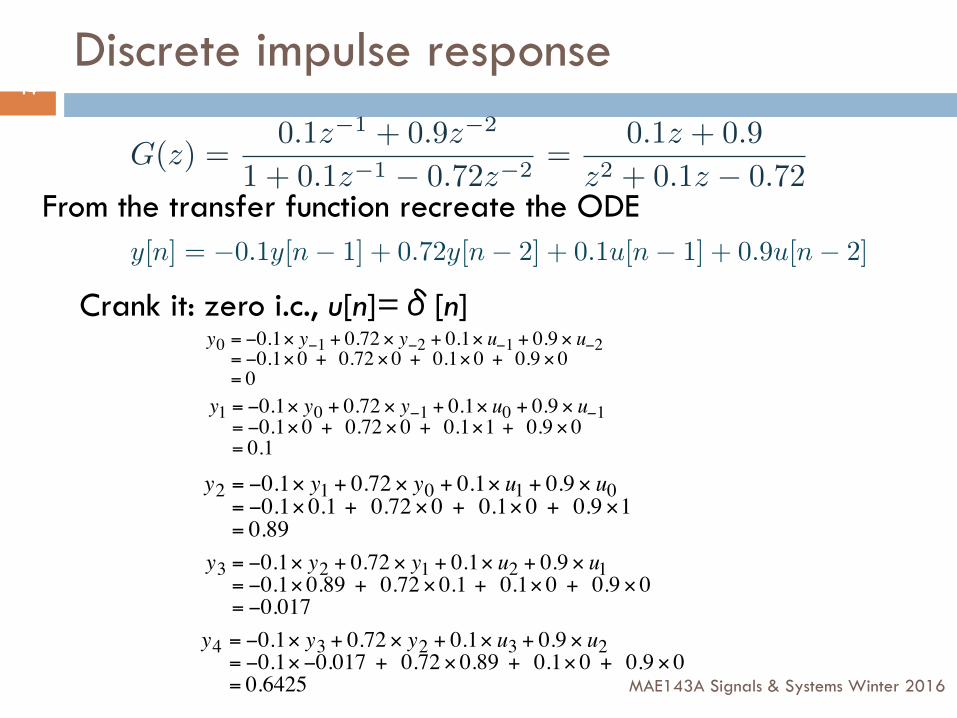
From the transfer function recreate the ODE
Crank it: zero i.c., u[n]=δ[n]
G(z) =0.1z�1 + 0.9z�2
1 + 0.1z�1 � 0.72z�2=
0.1z + 0.9
z2 + 0.1z � 0.72
y[n] = �0.1y[n� 1] + 0.72y[n� 2] + 0.1u[n� 1] + 0.9u[n� 2]
Impulse response via matlab
MAE143A Signals & Systems Winter 2016
15
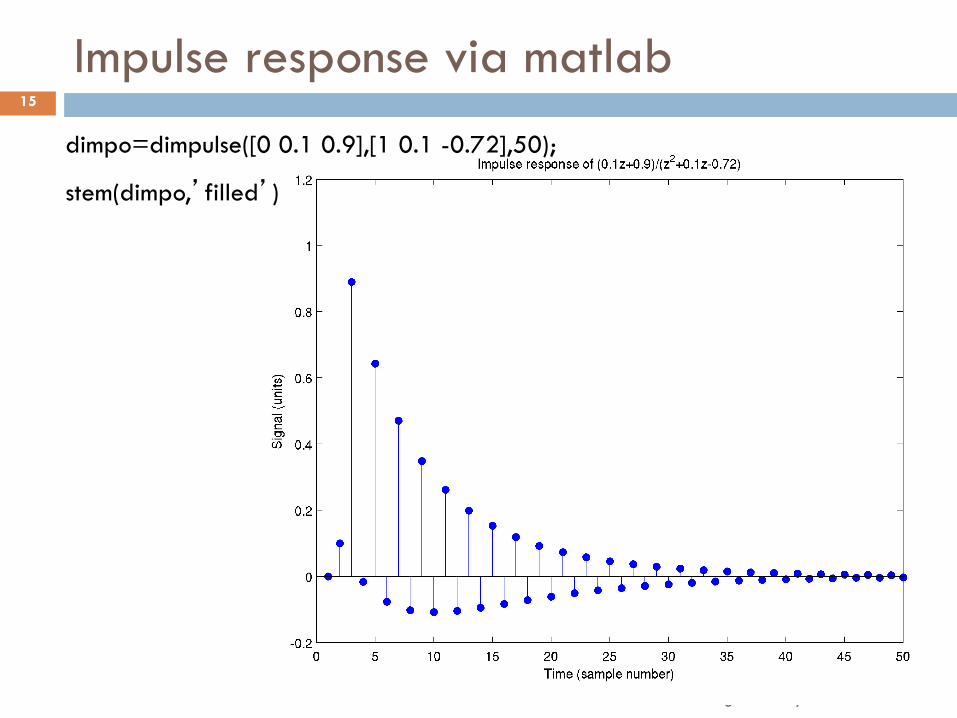
dimpo=dimpulse([0 0.1 0.9],[1 0.1 -0.72],50);
stem(dimpo,’filled’)

Impulse response via partial fractions
MAE143A Signals & Systems Winter 2016
16
Same as for Laplace … and just as much fun
Note that the stable poles yield exponentially decaying terms
These modes are very fast – near z=-1 Rapid changes in the response
Y (z) = G(z)U(z) =0.1z�1 + 0.9z�2
1 + 0.1z�1 � 0.72z�2⇥ 1
=0.1z + 0.9
z2 + 0.1z � 0.72
=98/170z � 0.8
� 81/170z + 0.9
=98170
⇥ z�1
1� 0.8z�1� 81
170⇥ z�1
1 + 0.9z�1
=98170
z�1 ⇥ 11� 0.8z�1
� 81170
z�1 ⇥ 11 + 0.9z�1
=98170
z�1�1 + 0.8z�1 + 0.64z�2 + 0.512z�3 + . . .
�
� 81170
z�1�1� 0.9z�1 + 0.81z�2 � 0.729z�3 + . . .
�
= 0 + 0.1z�1 + 0.89z�2 � 0.017z�3 + 0.6425z�4 � . . .
= Z [{0, 0.1, 0.89,�0.017, 0.6425, . . . }]
Matlab does partial fractions
MAE143A Signals & Systems Winter 2016
17
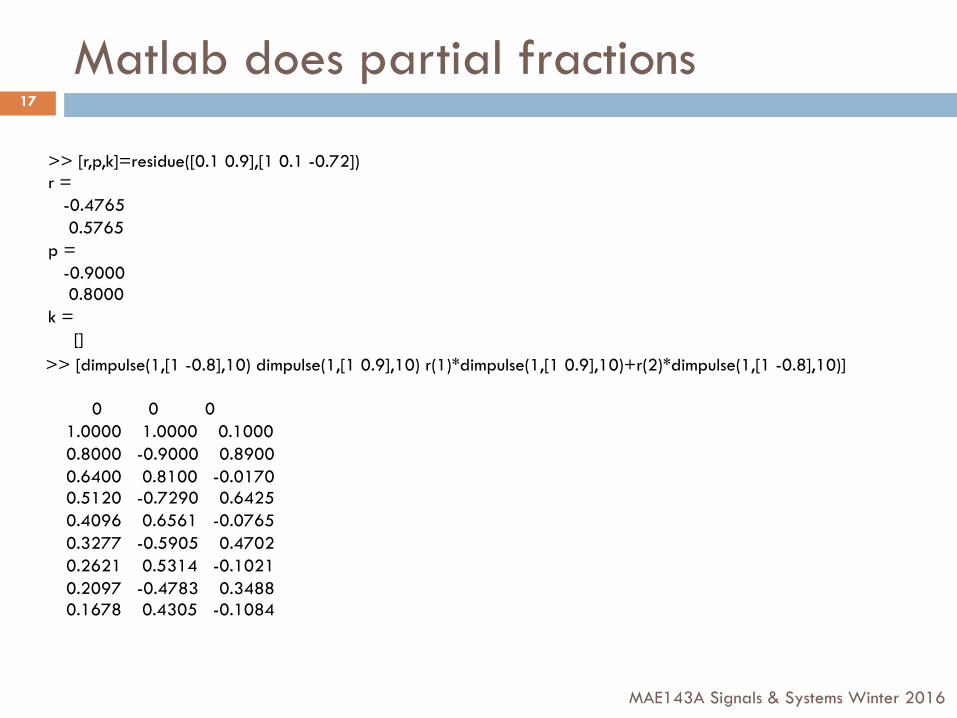
>> [dimpulse(1,[1 -0.8],10) dimpulse(1,[1 0.9],10) r(1)*dimpulse(1,[1 0.9],10)+r(2)*dimpulse(1,[1 -0.8],10)] 0 0 0 1.0000 1.0000 0.1000 0.8000 -0.9000 0.8900 0.6400 0.8100 -0.0170 0.5120 -0.7290 0.6425 0.4096 0.6561 -0.0765 0.3277 -0.5905 0.4702 0.2621 0.5314 -0.1021 0.2097 -0.4783 0.3488 0.1678 0.4305 -0.1084
>> [r,p,k]=residue([0.1 0.9],[1 0.1 -0.72]) r = -0.4765 0.5765 p = -0.9000 0.8000 k = []
Discrete frequency response
MAE143A Signals & Systems Winter 2016
18
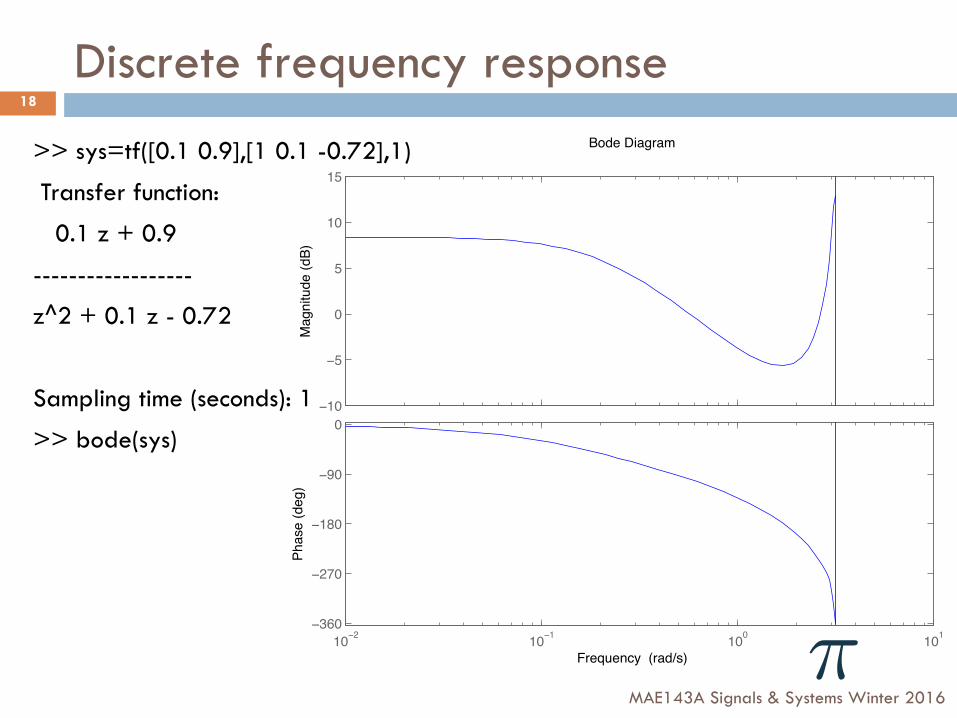
>> sys=tf([0.1 0.9],[1 0.1 -0.72],1)
Transfer function:
0.1 z + 0.9
------------------
z^2 + 0.1 z - 0.72
Sampling time (seconds): 1
>> bode(sys)
−10
−5
0
5
10
15
Mag
nitu
de (d
B)
10−2 10−1 100 101−360
−270
−180
−90
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/s) ⇡

Summary of discrete time
Continuous-time Signals: functions Systems: ODEs, impulse response, state space Laplace transforms:
poles stability in Re[s]<0
Fourier transforms: Frequency content Frequency response Frequency axis
Convolution
Discrete-time Signals: sequences Systems: ODEs, impulse response, state space Z transforms:
Poles stability in |z|<1
Discrete Fourier transforms: Frequency content Frequency response Frequency axis
Convolution via FFT
19
MAE143A Signals & Systems Winter 2016
s = j! z = ej!
Digital filters
MAE143A Signals & Systems Winter 2016
20
Applied to data as a sequence Matlab commands yield the transfer function elements
butter, ellip, cheby1, cheby2, FIR >> help butter butter Butterworth digital and analog filter design. [B,A] = butter(N,Wn) designs an Nth order lowpass digital Butterworth filter and returns the filter coefficients in length N+1 vectors B (numerator) and A (denominator). The coefficients are listed in descending powers of z. The cutoff frequency Wn must be 0.0 < Wn < 1.0, with 1.0 corresponding to half the sample rate. If Wn is a two-element vector, Wn = [W1 W2], butter returns an order 2N bandpass filter with passband W1 < W < W2. [B,A] = butter(N,Wn,'high') designs a highpass filter. [B,A] = butter(N,Wn,'low') designs a lowpass filter. [B,A] = butter(N,Wn,'stop') is a bandstop filter if Wn = [W1 W2].
First 13 lines








![Discrete Control - Real-Time Systems, Lecture 14 · Discrete Control Real ... System: Chapter 12] 1. Discrete Event Systems 2. ... mechanism is time-driven. Continuous discrete-time](https://img.dokumen.tips/doc/110x75/5b1497697f8b9a3e7c8daf88/discrete-control-real-time-systems-lecture-14-discrete-control-real-system.jpg)




















