Embed Size (px)
Citation preview

SVEUČILIŠTE U ZAGREBUFAKULTET ELEKTROTEHNIKE I RAČUNARSTVA
DIPLOMSKI RAD br. 245
DINAMIČKO OPTIMALNOPOZICIONIRANJE AKTIVNE PLOHE
FOTONAPONSKOG PANELA
Marko Gulin
Zagreb, lipanj 2011.

Zahvaljujem se prof. dr. sc. Nedjeljku Periću na pruženoj prilicii povjerenju za izradu ovog rada te doc. dr. sc. Mariju Vašku napruženoj pomoći i stručnim savjetima.

Sadržaj
1 Uvod 1
2 Energija Sunčeva zračenja 32.1 Sunce kao izvor zračenja i energije . . . . . . . . . . . . . . . . . . . . . 32.2 Fotonaponski efekt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.3 Osnovni pojmovi i definicije . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 Identifikacija modela Sunčeve dozračenosti 93.1 Neuronske mreže . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.1.1 Povijesni razvoj neuronskih mreža . . . . . . . . . . . . . . . . . 103.1.2 Statički modeli neurona . . . . . . . . . . . . . . . . . . . . . . . 123.1.3 RBF neuronske mreže . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2 Algoritmi učenja neuronskih mreža . . . . . . . . . . . . . . . . . . . . . 153.2.1 Kriterij kakvoće . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.2.2 Levenberg-Marquardtov algoritam . . . . . . . . . . . . . . . . . 163.2.3 Algoritam roja čestica . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3 Rezultati identifikacije . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4 Proizvodnja električne energije fotonaponskog pretvornika 264.1 Sunčeva dozračenost na nagnutu plohu . . . . . . . . . . . . . . . . . . . 264.2 Dinamički termički model fotonaponskog panela . . . . . . . . . . . . . . 284.3 Modeliranje stohastičkog okruženja . . . . . . . . . . . . . . . . . . . . . 314.4 Rezultati simulacije razvijenog modela . . . . . . . . . . . . . . . . . . . 33
i

Sadržaj ii
5 Sinteza prediktivnog upravljanja nagibom fotonaponskog panela 365.1 Modelsko prediktivno upravljanje . . . . . . . . . . . . . . . . . . . . . . 365.2 Diferencijska evolucija . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.2.1 Inicijalizacija trenutne populacije . . . . . . . . . . . . . . . . . . 385.2.2 Mutacija vektora trenutne populacije . . . . . . . . . . . . . . . . 395.2.3 Rekombinacija vektora . . . . . . . . . . . . . . . . . . . . . . . . 39
5.3 Simulacije razvijenog algoritma upravljanja . . . . . . . . . . . . . . . . 40
6 Zaključak 45
Sažetak 48
Abstract 49
Životopis 50

Poglavlje 1
Uvod
Značaj obnovljivih izvora električne energije u svijetu raste dinamikom koja do sada nijeviđena čak i u doba informatičke revolucije. Tome naročito pridonose sljedeći čimbenici:(i) nestalnost cijena i ograničenost izvora danas još u strukturi energetskih izvoradominantnih fosilnih goriva, (ii) prijetnja klimatskih promjena, (iii) težnja nacionalnihgospodarstava za energetskom neovisnošću, (iv) perspektiva otvaranja novih radnihmjesta u energetskoj industriji itd.
Prema podatcima iz 2008. godine oko 19% svjetske proizvodnje energije dolazilo jeiz obnovljivih izvora, od čega je 13% proizvedeno iz biomase, 3.2% u hidroelektranama,a tek 2.7% iz tzv. novih obnovljivih izvora energije (vjetar, Sunčeva dozračenost,geotermalna toplina i biogoriva) [1]. U ukupnoj svjetskoj proizvodnji električne energijeobnovljivi su izvori sudjelovali s oko 18% proizvodnje, pri čemu je 15% proizvedeno uhidroelektranama, a 3% iz ostalih obnovljivih izvora energije [1]. S obzirom na trenutnuraspodjelu u svjetskoj proizvodnji energije, obnovljivi izvori imaju mnogo prostora zanapredak te postaju jedan od primarnih ciljeva u strateškim planovima budućeg razvojavećine zemalja. Ovome u prilog ide i činjenica kako su zemlje Europske Unije donijeleniz smjernica i mjera s ciljem povećanja uporabe obnovljivih izvora energija u ukupnojpotrošnji na 20%, smanjenja emisije štetnih plinova za 20%, povećanja učinkovitostikorištenja energije za 20% te zamjene 10% goriva u cestovnom prometu s alternativnimgorivima, sve navedeno s rokom izvršenja do 2020. godine [6].
Jedan od glavnih razloga nedovoljnog korištenja obnovljivih izvora je ekonomskaneisplativost sustava za njihovo iskorištavanje. Fosilna goriva unatoč konstantnom rastucijene i dalje predstavljaju ekonomski daleko isplativiji izvor energije. Međutim, uzmuli se u obzir ograničenost izvora fosilnih goriva i štetne posljedice koje takvi izvorienergije imaju na okoliš postaje jasno kako je potrebno poticati razvoj i korištenje
1

Poglavlje 1. Uvod 2
obnovljivih izvora. Ulaganjem u tehnički razvoj agregata obnovljivih izvora energije, onisvojom cijenom postaju sve konkurentniji konvencionalnim izvorima. U ovom radu suopisani postupci sinteze upravljanja nagibom fotonaponskog panela s ciljem povećanjaproizvodnje električne energije.
Stohastički karakter obnovljivih izvora predstavlja otegotnu okolnost za njihovomasovno korištenje. Upravo je zbog toga važno razviti odgovarajuće napredne metodeupravljanja kojima bi se na odgovarajući način postigao što manji efekt promjenjivihuvjeta na konačan rezultat proizvedene električne energije. U tom kontekstu prirodnose nameće modelsko prediktivno upravljanje fotonaponskim pretvornikom. Korištenjempoznatog modela sustava i dostupnih mjerenja moguće je predvidjeti vladanje sustavau budućnosti te u skladu s time djelovati odgovarajućim upravljačkim zakonom koji ćemaksimizirati proizvodnju električne energije duž predikcijskog horizonta.
U prvom dijelu rada opisane su osnovne karakteristike Sunca i njegova zračenja.U drugom dijelu rada napravljena je identifikacija modela Sunčeve dozračenosti kaostatičke funkcije geografskog položaja i meteoroloških podataka. U trećem dijelu radarazvijen je dinamički model proizvodnje električne energije fotonaponskog pretvornikau stohastičkom okruženju. Na temelju tako razvijenog modela napravljena je sintezamodelskog prediktivnog upravljanja, a kao rezultat sinteze prediktivnog upravljanjadobiven je plan nagiba fotonaponskog panela na predikcijskom horizontu, odnosnoza jedan dan unaprijed. Kako ulazni meteorološki podatci i razvijeni model Sunčevedozračenosti sadrže određene nesigurnosti, sinteza modelskog prediktivnog upravljanjanapravljena je u stohastičkom okruženju. Razvijeni sustav upravljanja provjeren jesimulacijski na računalu.

Poglavlje 2
Energija Sunčeva zračenja
Sunce je najbliža zvijezda planetu na kojem živimo te, posredno ili neposredno, izvorgotovo sve raspoložive energije na Zemlji. Sunčeva energija potječe od nuklearnihreakcija u njegovom središtu, gdje temperatura doseže 15 ·106 ◦C. Radi se o nuklearnojfuziji kod koje spajanjem vodikovih atoma nastaje helij, uz oslobođenje velike količineenergije. Svake sekunde na ovaj način u helij prelazi oko 600 milijuna tona vodika, pričemu se masa od 4 milijuna tona vodika pretvara u energiju. Nuklearna fuzija odvija sena Suncu oko 5 milijardi godina, a prema raspoloživim zalihama vodika pretpostavljase da je taj proces tek na polovici svog životnog ciklusa. U ovoj su cjelini dane neketeoretske činjenice vezane uz Sunce i energiju njegova zračenja.
2.1 Sunce kao izvor zračenja i energije
Prema spektralnoj klasi Sunce spada u klasu G2V, gdje spektralna oznaka G2 ukazujena površinsku temperaturu koja iznosi 5778 K, dok spektralna oznaka V ukazuje daSunce, kao i većina drugih zvijezda, energiju stvara nuklearnom fuzijom pretvarajućivodik u helij [3]. Pri tome je masa nukleina helija manja od mase protona vodika odkojih je nastao, a taj gubitak mase ∆m očituje se u oslobođenoj energiji koja se premaEinsteinu može proračunati na sljedeći način:
E = ∆m · c20, (2.1)
gdje je ∆m promjena mase u kilogramima, a c0 brzina svjetlosti u vakuumu1. Prematome jedan gram mase odgovara energiji od 25 milijuna kilovatsati2, odnosno tu količinu
1Brzina svjetlosti u vakuumu iznosi c0 = 299792458ms−1
21 kWh odgovara energiji od 3.6 MJ
3

Poglavlje 2. Energija Sunčeva zračenja 4
energije bismo dobili ako jedan gram mase na neki način pretvorimo u energiju.Svako tijelo emitira zračenje određene valne duljine i frekvencije u količini koja je
funkcija temperature tijela. Za opis zračenja nekog tijela poslužit ćemo se teoretskimobjektom koji se naziva crno tijelo. Crno tijelo se definira kao savršeni emiter i apsorberkoji ne postoji u prirodi. Kako je riječ o savršenom emiteru, crno tijelo emitira višezračenja po jedinici površini nego bilo koji realni objekt iste temperature. Zračenjeodređene valne duljine koju emitira crno tijelo određene temperature može se opisatipomoću Planckova zakona:
φc(λ, T ) = c1
λ5(exp( c2λT )− 1
) , (2.2)
gdje je φc intezitet zračenja3 po valnim duljinama, T je apsolutna temperatura crnogtijela, λ je valna duljina zračenja, a c1 i c2 su konstante zračenja crnog tijela:
c1 = 3.7413 · 108 Wµm4m−2, c2 = 1.4388 · 104 µmK.
Površina ispod Planckove krivulje između dvije valne duljine odgovara intezitetuzračenja između tih valnih duljina, pa prema tome ukupna površina ispod Planckovekrivulje odgovara ukupnom intezitetu zračenja crnog tijela. Integracijom izraza (2.2)po svim pozitivnim valnim duljinama λ ∈ (0,∞) dođe se do izraza za ukupni intezitetzračenja crnog tijela koji je poznat i pod nazivom Stefan-Boltzmannov zakon zračenja:
Ec = σT 4, (2.3)
gdje je Ec intezitet zračenja crnog tijela, a σ je Stefan-Boltzmannova konstanta:
σ = 5.67 · 10−8 Wm−2K−4.
Prema posljednjim mjerenjima, Sunčevo zračenje po spektru i ukupnoj količinienergije može se aproksimirati zračenjem crnog tijela s temperaturom od 5760 K [12].Primjenom Stefan-Boltzmannovog zakona zračenja crnog tijela može se izračunati kakoukupna snaga emitirana sa Sunčeve površine iznosi oko 63 · 106 Wm−2. Energijaemitirana od Sunca prolazi kroz prostor dok se ne sudari s planetima, raznim nebeskimobjektima ili međuzvjezdanim plinom i prašinom. Intezitet Sunčeva zračenja kojipogađa objekte ovisi o udaljenosti od Sunca, a zakon koji opisuje intenzitet zračenja Ina udaljenosti d naziva se inverzni kvadratni zakon. Ovaj zakon govori da je intezitetSunčeva zračenja obrnuto proporcionalan s kvadratom udaljenosti od Sunca:
I ∼ 1d2 . (2.4)
3Intezitet zračenja se definira kao emitirana snaga po jedinici površine, Wm−2

Poglavlje 2. Energija Sunčeva zračenja 5
Poznavajući prosječnu emisiju snage sa Sunčeve površine i srednju udaljenost izmeđuZemlje i Sunca4, lako se izračuna kako intezitet zračenja na vanjskom sloju atmosfereZemlje iznosi 1367 Wm−2. Prolaskom kroz zračni omotač Sunčevo zračenje slabi imijenja se. Atomi, molekule, aerosoli, čestice prašine, a prije svega oblaci reflektirajudio Sunčeva zračenja u svemir, dok drugi dio atmosfera rasipa u svim smjerovima,pa tako nastaje difuzno zračenje odnosno zračenje neba. Raspršivanje nastaje namolekulama atmosferskih plinova i raznim česticama koje lebde u zraku. One energijuelektromagnetskog zračenja primljenu iz jednog smjera emitiraju na sve strane. Zatoni svjetlost ne dobivamo samo iz smjera Sunca nego sa svih strana neba. UkupnoSunčevo zračenje koje dospijeva na Zemlju, osim od difuznog zračenja sastoji se i oddirektnog zračenja. Direktno zračenje pripada onom dijelu zračenja koje izravno dolazido Zemljine površine bez prethodnog upijanja od strane atmosferskih komponenti.Sunčevo zračenje koje dospije do Zemljine površine još se naziva i Sunčeva dozračenost.
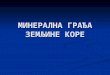
Na karti koja prikazuje godišnje insolacijske razine Europe (Slika 2.1) očito je daeuropski kontinent nije idealno smješten za eksploataciju Sunčeve energije. Unatočovoj činjenici u Europi je direktno iskorištavanje Sunčeve energije u velikom porastu.Uglavnom je to rezultat politike pojedinih država koje subvencioniraju instaliranjeelemenata za pretvorbu Sunčeve energije u iskoristivi oblik energije.
Slika 2.1: Karta godišnje insolacije za Europu4Srednja udaljenost između Zemlje i Sunca iznosi 149.5 · 106 km

Poglavlje 2. Energija Sunčeva zračenja 6
2.2 Fotonaponski efekt
Godine 1839. Edmond Becquerel otkrio je fotonaponski efekt. On je to opisao kaoproizvodnju električne struje kada se dvije ploče platine ili zlata urone u kiselu, lužnatuili neutralnu otopinu te izlože Sunčevu zračenju. Nakon Becquerelova otkrića prošlo jeviše od 40 godina da bi tek 1883. godine Charles Fritts načinio prvu pravu solarnu ćelijudeponirajući na poluvodički selen tanki sloj zlata i tako ostvario potencijalnu barijeruna kontaktu metal-poluvodič [12]. Jedan od značajnijih radova na temu fotonaponskogefekta objavio je Albert Einstein 1905. godine, zbog čega mu je 1921. godine dodijeljenaNobelova nagrada za fiziku.
Kada se fotonaponska ćelija osvijetli, odnosno kada apsorbira Sunčevo zračenje,fotonaponskim se efektom na njezinim krajevima pojavljuje elektromotorna sila (napon)i tako fotonaponska ćelija postaje izvor električne energije. Pri razmatranju se emisije iapsorpcije Sunčeva zračenja (elektromagnetskih valova) zračenje može promatrati kaosnop čestica, tzv. fotona. Cjelokupni raspon zračenja koje nastaje u svemiru nazivamoelektromagnetskim spektrom. Elektromagnetska zračenja uzajamno se razlikuju jedinofrekvencijom. Svjetlost nastaje kada se električni naboji kreću u elektromagnetskompolju. Atom odašilje svjetlost kada je neki od njegovih elektrona potaknut dodatnomenergijom izvana. Zračenje pobuđenih elektrona predočavamo valom. Svjetlost manjeenergije ima manju frekvenciju ili učestalost ali veću valnu duljinu, a ona s više energijeima veću frekvenciju ali manju valnu duljinu. Na Slici 2.2 je prikazan elektromagnetskispektar Sunčeva zračenja.
Povećavanje frekvencije (f )
Povećavanje valne duljine (λ)
λ (m)
f (Hz)
Povećavanje valne duljine (λ) u nm
1024 1022 1012
10-4
101010141018 1016
100
1020
Vidljivi spektar
X zrake UV IR MikrovaloviRadiovaloviFM AMγ zrake Dugi radiovalovi
102 100104106108
102 104 106 10810-1410-16 10-210-8 10-610-12 10-10
700600500400
Slika 2.2: Elektromagnetski spektar Sunčeva zračenja

Poglavlje 2. Energija Sunčeva zračenja 7
Fotoni su čestice bez naboja koje se gibaju brzinom svjetlosti c0, a svaki foton nosiodređenu energiju koja je određena Einsteinovom relacijom [12]:
Ef = hv = hc0λ
(2.5)
gdje je v brzina promatranog elektromagnetskog zračenja, c0 je brzina svjetlosti uvakuumu, λ je valna duljina promatranog elektromagnetskog zračenja, a h je Planckovakonstanta:
h = 6.625 · 10−34 Js
Elementi za pretvorbu energije Sunčeva zračenja u električnu energiju nazivajuse fotonaponske ćelije, a skup takvih međusobno povezanih ćelija čini fotonaponskipanel. Fotonaponske ćelije izgrađene su od dva sloja – pozitivno i negativno dopiranogpoluvodiča, a razlika potencijala između ta dva sloja ovisi o intenzitetu Sunčeva zračenja.Prilikom pada Sunčeva zračenja na površinu fotonaponske ćelije, nosioci energije (fotoni)predaju svoju energiju ćeliji i na taj način izbijaju negativno nabijene elektrone izatoma. Izbijeni elektroni kreću se prema drugoj (negativnoj) strani ćelije i na taj načindolazi do razlike potencijala, tj. generira se električna energija. Fotonaponske ćelijeuglavnom se izrađuju od silicija.
2.3 Osnovni pojmovi i definicije
Da bi se moglo provesti modeliranje Sunčeve dozračenosti koje je neophodno za razvojmodelskog prediktivnog upravljanja, nije potrebno znati baš svaki detalj o fizici Sunca.S druge strane poželjno je poznavati barem neke osnovne pojmove koji se koriste priopisu Sunca i načinu iskorištavanja Sunčeva zračenja. U nastavku je dan skup najčešćekorištenih pojmova:
1. Insolacija (engl. Insolation) je mjera energije Sunčeva zračenja primljenog napovršini Zemlje, mjerena u jedinici Wsm−2.
2. Dozračenost (engl. Irradiance) je direktna, difuzna i reflektirajuća komponentaSunčeva zračenja koje pada na površinu Zemlje, mjerena u jedinici Wm−2.
3. Direktna dozračenost (engl. Direct irradiance) je Sunčevo zračenje koje padadirektno na Zemlju bez prethodnog sudaranja s atmosferskim komponentama.
4. Difuzna dozračenost (engl. Diffuse irradiance) je Sunčevo zračenje primljenona površini Zemlje indirektno kao rezultat raspršenja zbog oblaka, magle, prašineili drugih atmosferskih komponenti.

Poglavlje 2. Energija Sunčeva zračenja 8
5. Zenitni kut (engl. Zenith angle) je kut između pravca od interesa (npr. Sunca)i pravca okomitog na horizontalnu plohu (zenit).
6. Azimutni kut (engl. Azimuth angle) je kut između smjera juga i projekcijepravca Zemlja–Sunce na horizontalnu plohu.
7. Fotonaponska ćelija (engl. Photovoltaic cell) je uređaj, odnosno poluvodičkielement koji izravno pretvara energiju Sunčeva zračenja u električnu energiju.
8. Fotonaponski panel (engl. Photovoltaic panel) je skup međusobno povezanihfotonaponskih ćelija. Fotonaponski panel zajedno s istosmjernim pretvaračemkoji se nalazi na izlazu iz panela čini fotonaponski pretvornik.

Poglavlje 3
Identifikacija modela Sunčevedozračenosti
Poznavanje modela Sunčeve dozračenosti ključno je za sintezu modelskog prediktivnogupravljanja, koje će maksimizirati proizvodnju električne energije tokom dana. Dabi se ostvario ovaj cilj napravljena je identifikacija parametarskog modela direktne idifuzne komponente Sunčeve dozračenosti kao statičke funkcije geografskog položaja imeteoroloških podataka. Parametarski model identificiran je primjenom RBF neuronskemreže, a ulazno-izlazni podatci potrebni za učenje neuronske mreže preuzeti su izNSRDB baze podataka1 [19]. U spomenutoj bazi podataka nalaze se podatci mjerenjaza 1454 lokacije u Sjedinjenim Američkim Državama u periodu 1991.–2005. godine,podijeljenjih u 3 klase gdje pojedina klasa označava kvalitetu mjerenja. Odabranalokacija za identifikaciju parametarskog modela je Washington DC Dulles Intl. Airport,pri čemu su podatci od 1996. do 2003. godine iskorišteni za učenje neuronske mreže,dok su podatci od 2004. do 2005. godine iskorišteni za validaciju naučene neuronskemreže. Radi numeričke stabilnosti obavljeno je normiranje ulazno-izlaznih podataka, aza učenje neuronske mreže primijenjena su dva različita tipa algoritama: (i) Levenberg-Marquardtov algoritam i (ii) algoritam roja čestica.
3.1 Neuronske mreže
Pojam neuronska mreža2 donedavno se uglavnom koristio za referenciranje na mrežubioloških neurona. Danas se taj pojam sve više odnosi na umjetne neuronske mreže3,
1National Solar Radation Data Base (NSRDB)2engl. Neural Network (NN)3engl. Artificial Neural Network (ANN)
9

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 10
tj. mreže sastavljanje od umjetnih neurona i čvorova međusobno povezanih sinaptičkimvezama s pridijeljenim težinskim koeficijentima. Prema tome neuronske mreže dijelimona dvije velike skupine: (i) biološke i (ii) umjetne neuronske mreže. Istraživanja irazvoj na području umjetnih neuronskih mreža motivirana su spoznajama o građi inačinu funkcioniranja ljudskog mozga te njegovim nevjerojatno velikim sposobnostimau rješavanju složenih problema [9]. Dva su osnovna cilja tih istraživanja: (i) razvoj novihstruktura umjetnih neuronskih mreža koje bi funkcionirale na analogan način kao štofunkcionira ljudski mozak i koje bi mogle oponašati barem neke njegove funkcije te(ii) njihova primjena u rješavanju praktičnih problema. Područja primjene umjetnihneuronskih mreža su identifikacija modela sustava i upravljanje takvim sustavima,prepoznavanje uzoraka, medicinske dijagnoze itd.
3.1.1 Povijesni razvoj neuronskih mreža
Ideja o razvoju umjetnih neuronskih mreža započinje s razvojem digitalnih računala.Prve radove o umjetnim neuronskim mrežama objavili su 1943. godine neuro-psihologWarren McCulloch i tada mladi matematičar Walter Pitts. Oni su koristili jednostavanmodel neurona koji poput biološkog neurona obrađuje signale kroz sinaptičku i somatskuoperaciju. Sinaptička operacija daje određeni značaj, odnosno težinu svakom ulaznomsignalu u neuron, dok somatska operacija prikuplja sve otežane ulazne signale, te ako jenjihova kumulativna vrijednost veća od praga osjetljivosti neurona, generira se impulskoji se šalje prema drugim neuronima.
McCulloch-Pittsov model umjetnog neurona nazvan je perceptron, a sinaptičkaoperacija je predstavljena otežavanjem ulaznih signala težinskim koeficijentima. Tako seotežani ulazni signali zbrajaju, i ako je vrijednost tog zbroja veća od praga osjetljivosti,nelinearna aktivacijska funkcija ψ generira izlazni signal neurona iznosa jedan, a ako jemanja izlaz neurona je nula. McCulloch i Pitts su smatrali da je povezivanjem velikogbroja perceptrona moguće modelirati ljudski mozak [20]. Međutim, iako po svojojorganizaciji podsjeća na biološki neuron, perceptron je prejednostavan pa stoga ima iograničene sposobnosti predstavljanja [9].
Frank Rosenblatt je 1959. godine primijenio Hebbianov algoritam za podešavanjesinaptičkih težinskih koeficijenata perceptrona te je to ujedno bila i prva umjetnaneuronska mreža koja je imala sposobnost učenja. Rosenblatt je 1962. godine u svomeradu dokazao značajan teorem o učenju perceptrona [7]: Perceptron može naučiti svešto može predstaviti. Pri tome je predstavljanje sposobnost aproksimiranja određenefunkcije, a učenje postupak koji sustavnim podešavanjem parametara mreže postiže da

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 11
Akson
Soma
Dendriti Izlazi premadrugim neuronima
(a) Strukturna shema biološkog neurona
+
Prag osjetljivosti
SinapseDendriti
Sinaptička operacija Somatska operacija
Prikupljanje signala
−
Nelinearnaaktivacijska funkcija
v(t)
wn+1w1
w2
wn
x1(t)
x2(t)
xn(t)
Ψ1 y(t)
Veze premadrugim neuronima
Izlaz neurona(akson)
(b) Strukturna shema perceptrona [9]
Slika 3.1: Biološki neuron i perceptron
ona postane zadovoljavajuća aproksimacija te funkcije. Bernard Widrow i Ted Hoffsu 1960. godine modificirali perceptron tako da su umjesto diskontinuirane primijenilikontinuiranu linearnu aktivacijsku funkciju, a za podešavanje težinskih koeficijenataprimijenili su algoritam najmanjih kvadrata. Sve je ovo dovelo do euforičnog istraživanjana području umjetnih neuronskih mreža.
Ulazi IzlaziSkriveni sloj
(a) Jednoslojna neuronska mreža
Ulazi IzlaziSkriveni sloj 1 Skriveni sloj 2
(b) Višeslojna neuronska mreža
Slika 3.2: Organizacija neuronskih mreža
Nakon što je dokazano da postoje ozbiljna ograničenja sposobnosti predstavljanjajednoslojnih perceptronskih neuronskih mreža [14] došlo je do stagnacije istraživačkihnapora na području razvoja umjetnih neuronskih mreža. Zastoj u napretku potrajao jesve do 1986. godine kada je grupa autora objavila niz poticajnih rezultata i algoritamao umjetnim neuronskim mrežama, među kojima je najvažniji algoritam povratnogprostiranja izlazne pogreške4 [9]. Ovaj algoritam je riješio problem učenja višeslojnihneuronskih mreža. Nakon proboja barijere što ga je napravio BP algoritam, široka jeznanstvena zajednica usmjerila istraživačke aktivnosti u proučavanje i razvoj umjetnihneuronskih mreža.
4engl. BackPropagation algorithm (BP)

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 12
3.1.2 Statički modeli neurona
Perceptron ima skromne mogućnosti predstavljanja, što je u najvećoj mjeri posljedicadiskontinuiteta aktivacijske funkcije. Zbog toga je otežano i učenje mreže, jer većinagradijentnih algoritama učenja za podešavanje težinskih koeficijenata unutarnjih slojevamreže zahtijeva proračunavanje derivacije aktivacijskih funkcija. Ova se ograničenjaperceptrona mogu prevladati primjenom kontinuirane i derivabilne aktivacijske funkcije.Do danas su se razvili i brojni algoritmi učenja koji ne zahtijevaju proračunavanjederivacije aktivacijskih funkcija, a najpopularniji među njima su genetski i evolucijskialgoritmi. Opisani model neurona ne sadrži dinamičke članove pa njegov izlaz ovisiisključivo o trenutnim vrijednostima ulaznih signala i težinskim koeficijentima. Stogase ovaj neuron u literaturi najčešće naziva statičkim neuronom [9].
Matematički se perceptron može opisati sljedećim izrazima:
v(t) =m∑i=1
wixi(t)− wm+1, (3.1a)
y(t) = ψ(v(t)), (3.1b)
gdje je xi ulazni signal, wi je sinaptički težinski koeficijent, wm+1 je prag osjetljivostineurona, v je ulaz u nelinearnu aktivacijsku funkciju, ψ je nelinearna aktivacijskafunkcija, a y je izlaz neurona.
Ako se ulazni signali i sinaptički težinski koeficijenti prikažu u obliku vektora, tadase izraz (3.1a) može zapisati na sljedeći način:
v(t) = w>x(t), (3.2)
gdje su pojedini vektori x(t) i w definirani kao:
x(t) =[x1(t) . . . xm(t) −1
]>, w =
[w1 . . . wm wm+1
]>.
Izraz (3.1a) opisuje sinaptičku operaciju i usporedbu s pragom osjetljivosti neurona.Ove operacije zajedno čine tzv. operaciju konfluencije. Izraz (3.1b) opisuje nelinearnuaktivacijsku funkciju. Dakle, s matematičkog se stajališta umjetni neuron dijeli naoperaciju konfluencije i nelinearnu aktivacijsku funkciju.
Velika je većina neuronskih mreža izgrađena od neurona sa skalarnim umnoškom kaooperacijom konfluencije. Izuzetak su često primjenjivane RBF5 neuronske mreže kod
5engl. Radial Basis Function (RBF)

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 13
kojih se umjesto skalarnog umnoška izračunava Euklidska udaljenost između vektoraulaznih signala x(t) i vektora središta neurona wc:
v(t) = ‖x(t)−wc‖ =√
[x(t)−wc]>[x(t)−wc]. (3.3)
Nelinearna aktivacijska funkcija preslikava izlaznu vrijednost operacije konfluencijev(t) u izlazni signal neurona y(t) ograničenog iznosa. Iznos izlaznog signala neuronanajčešće je radi numeričke stabilnosti ograničen u području (0, 1) za unipolarne signaleodnosno u području (−1, 1) za bipolarne signale.
3.1.3 RBF neuronske mreže
RBF neuronske mreže dvoslojne su neuronske mreže sa statičkim neuronima, kod kojihse operacija konfluencije sastoji od otežavanja ulaznih signala te od proračuna Euklidskeudaljenosti između otežanih ulaznih signala i središta pojedinih neurona. Nelinearnaaktivacijska funkcija prvog sloja najčešće je Gaussova funkcija, a takve mreže se jošnazivaju i Gaussove RBF neuronske mreže. Izlazni signali iz prvog sloja otežavaju setežinskim koeficijentima te se tako otežani signali prosljeđuju na izlazni sloj. Izlaznisloj najčešće se sastoji od linearnih aktivacijskih funkcija jediničnog pojačanja.
|| ||•
|| ||•
|| ||•
+
+
+
x1,1
x1,2
x1,n(0)
x2,1
x2,2
x2,n(1)
wc,1
wc,2
wc,n(1)
v1,1
v1,2
v1,n(1)
y2,1
y2,2
y2,n(2)
v2,1
v2,2
v2,n(2)
wt,1,n(1)+1
wt,2,n(1)+1
wt,n(2),n(1)+1
0 1 2
ws,1,1w
s,2,1
ws,n(1),n(0)
wt,1,1w
t,2,1
wt,n(2),n(1)
1
2
n(1)
Slika 3.3: Strukturna shema RBF neuronske mreže
Definicija 3.1. Skalarni umnožak dvaju n-dimenzionalnih vektora v1, v2 ∈ Rn poelementima definira se kao:
v1×v2 =[v1,1v2,1 v1,2v2,2 . . . v1,nv2,n
]>, (3.4)
pri čemu je × operator koji označava umnožak dvaju n-dimenzionalnih vektora poelementima, a v1,i i v2,i su i-ti elementi vektora v1 i v2.

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 14
Operacija konfluencije RBF neuronske mreže može se opisati sljedećim izrazom:
v1,i = ‖x1×ws,i −wc,i‖ =
√√√√√n(0)∑k=1
(x1,kws,i,k − wc,i,k
)2, i = 1, ..., n(1), (3.5)
gdje je x1 vektor ulaznih signala, ws,i je vektor sinaptičkih težinskih koeficijenata i-togneurona, a wc,i je vektor središta i-tog neurona.
Rezultat operacije konfluencije je ulaz u nelinearnu aktivacijsku funkciju. Ako sepretpostavi da je za nelinearnu aktivacijsku funkciju primijenjena Gaussova funkcija,tada se ova operacija može opisati sljedećim izrazom:
x2,i = ψ1(v1,i, σi) = exp(−v2
1,i2σ2
i
), i = 1, ..., n(1), (3.6)
gdje je σi parametar neurona koji predstavlja odstupanje od središta Gaussove funkcije,a ψ1 je nelinearna aktivacijska funkcija skrivenog sloja.
Ulazi u aktivacijske funkcije izlaznog sloja mogu se izračunati kao:
v2 = Wtx2, (3.7)
gdje je Wt matrica težinskih koeficijenata na izlazu iz prvog sloja, a x2 vektor izlaznihsignala iz prvog sloja. Matrica težinskih koeficijenata Wt i vektor izlaznih signala izprvog sloja x2 definirani su kao:
Wt =
wt,1,1 . . . wt,1,n(1) wt,1,n(1)+1
wt,2,1 . . . wt,2,n(1) wt,2,n(1)+1... . . . ...
...wt,n(2),1 . . . wt,n(2),n(1) wt,n(2),n(1)+1
, x2 =
x2,1...
x2,n(1)
1
.
Konačni izlaz iz neuronske mreže može se izračunati prema sljedećem izrazu:
y2,i = ψ2(v2,i), i = 1, ..., n(2), (3.8)
gdje je ψ2 aktivacijska funkcija izlaznog sloja. Osim često primjenjivane linearnefunkcije s jediničnim pojačanjem (purelin), za aktivacijsku funkciju izlaznog sloja možese primijeniti i tzv. tansig funkcija:
ψ2(v2,i) = 21 + exp(−2v2,i)
− 1, i = 1, ..., n(2). (3.9)
Nakon definiranja matematičkog modela RBF neuronske mreže, potrebno je jošdefinirati i algoritam učenja. U nastavku su opisani korišteni algoritmi učenja neuronskemreže za identifikaciju modela Sunčeve dozračenosti.

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 15
3.2 Algoritmi učenja neuronskih mreža
Neuronska je mreža u potpunosti određena tek kada je uz njezinu strukturu definiran ialgoritam učenja [9]. Algoritam učenja podešava parametre mreže s ciljem pronalaženjatakvih vrijednosti parametara uz koje ona dobro aproksimira zadanu nelinearnu funkciju.Iako je razvijen veliki broj raznih algoritama učenja neuronskih mreža, moguće ih je ponačinu učenja mreže podijeliti na algoritme temeljene na pogrešci i algoritme temeljenena izlazu mreže.
Algoritmi temeljeni na pogrešci6 često se nazivaju i algoritmi s učiteljem zatošto zahtijevaju vanjski referentni signal s kojim uspoređuju dobiveni odziv neuronskemreže generirajući signal pogreške. Na temelju signala pogreške algoritam učenjamijenja parametre neuronske mreže s ciljem poboljšanja njezina vladanja, tj. smanjenjapogreške. Ovi se algoritmi mogu primijeniti samo ako je unaprijed poznato željenovladanje neuronske mreže, tj. podatci na osnovi kojih se mreža uči moraju sadržavatiparove vrijednosti ulazno-izlaznih signala.
Algoritmi temeljeni na izlazu mreže7 nazivaju se i algoritmi bez učitelja zato štone zahtijevaju vanjski referentni signal. Podatci na osnovi kojih mreža uči sadrže samovrijednosti ulaznih signala u mrežu.
+Neuronskamreža
Neuronskamreža
ym(t)x(t)
Algoritamučenja
Algoritamučenja
Promjena parametara
Promjenaparametara
yw(t)
ym(t)x(t)−
e(t)
Slika 3.4: Shematski prikaz učenja neuronske mreže primjenom algoritama temeljenihna pogrešci (lijevo) i algoritama temeljnih na izlazu iz mreže (desno)
U identifikaciji i upravljanju nelinearnim sustavima najčešće je poznato željenovladanje neuronske mreže, pa se za njezino učenje primjenjuju algoritmi temeljeni napogrešci. Kao mjera pogreške koristi se određena kriterijska funkcija koja može biti bilokoja pozitivna skalarna funkcija ovisna o parametrima neuronske mreže Θ. Algoritamučenja podešava parametre mreže dok kriterij kakvoće ne poprimi neki unaprijed zadaniminimalni iznos.
6engl. Error-based algorithms7engl. Output-based algorithms

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 16
3.2.1 Kriterij kakvoće
Kriterij kakvoće za učenje neuronske mreže definiran je kao [15]:
=(X,Θ) = 12
N∑i=1
e>(Xi,Θ)e(Xi,Θ) = 12
N∑i=1
e2(Xi,Θ), (3.10)
gdje je X skup ulaznih podataka, Θ je vektor parametara neuronske mreže, N je brojsati za koje postoje mjerenja, Xi je matrica ulaznih podataka unutar i-tog sata urezoluciji od jedne minute, a pogreška e je definirana kao:
ei ≡ e(Xi,Θ) =τ∑j=0
[kjf(xi,j ,Θ)]− INSRDB,i, (3.11)
gdje je f funkcija koja opisuje model Sunčeve dozračenosti, xi,j je vektor ulaznihpodataka u rezoluciji od jedne minute, INSRDB,i je mjerena insolacija unutar jednogsata preuzeta iz NSRDB kao podatak u Whm−2, sumacija predstavlja numeričkuintegraciju funkcije f unutar sata, τ je broj minuta unutar sata za koje je zenitnikut manji od 90◦, a kj je težinski faktor numeričke integracije
kj =
12
160 j = 0, τ,160 0 < j < τ.
(3.12)
Ako se u obzir uzme i efekt normiranja ulaznih i izlaznih podataka:
P = µP + v,
gdje su P normirani podatci, tada je kriterijska funkcija definirana kao:
=(X, Θ) = 12
N∑i=1
e>(Xi, Θ)e(Xi, Θ) = 12
N∑i=1
e2(Xi, Θ), (3.13)
pri čemu je pogreška e definirana kao:
ei ≡ e(Xi,Θ) =τ∑j=0
[kjf(xi,j , Θ)− v
µ
]− 1µINSRDB,i + v
µ, (3.14)
gdje su xi,j normirani ulazni podatci unutar i-tog sata u rezoluciji od jedne minute, Θsu normirani parametri modela Sunčeve dozračenosti, a µ i v su koeficijenti normiranja.
3.2.2 Levenberg-Marquardtov algoritam
Izraz za kriterij kakvoće (3.10) može se u vektorskom zapisu prikazati na sljedeći način:
=(X,Θ) = 12e>(X,Θ)e(X,Θ), (3.15)

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 17
gdje je e(X,Θ) vektor pogrešaka na čitavom skupu mjernih podataka:
e(X,Θ) =[e(X1,Θ) e(X2,Θ) . . . e(XN ,Θ)
]>. (3.16)
Za kriterijsku funkciju definiranu izrazom (3.15) gradijentni vektor i Hessian matricapoprimaju sljedeće oblike:
∇=(X,Θ) = J>(X,Θ)e(X,Θ), (3.17a)
∇2=(X,Θ) = J>(X,Θ)J(X,Θ) +N∑i=1
e(Xi,Θ)∇2e(Xi,Θ), (3.17b)
gdje je J(X,Θ) Jacobijeva matrica definirana kako slijedi:
∇e(X,Θ) = ∂e(X,Θ)∂Θ =
∂e(X1,Θ)∂Θ1
∂e(X1,Θ)∂Θ2
. . . ∂e(X1,Θ)∂Θn(Θ)
∂e(X2,Θ)∂Θ1
∂e(X2,Θ)∂Θ2
. . . ∂e(X2,Θ)∂Θn(Θ)
...... . . . ...
∂e(XN ,Θ)∂Θ1
∂e(XN ,Θ)∂Θ2
. . . ∂e(XN ,Θ)∂Θn(Θ)
. (3.18)
U točki Θ = Θ∗ bit će minimum funkcije =(X,Θ) ako su ispunjeni sljedeći uvjeti:
∂=(X,Θ)∂Θ
∣∣∣∣Θ=Θ∗
= 0, (3.19a)
∆Θ>∇2=(X,Θ)∆Θ > 0. (3.19b)
Ispunjenje uvjeta (3.19a) ukazuje da je u točki Θ∗ ekstrem kriterijske funkcije, međutimne može se zaključiti je li minimum, maksimum ili sedlo. Ispunjenje uvjeta (3.19b)ukazuje da je u točki ekstrema Θ∗ minimum postavljenje kriterijske funkcije. Numeričkipostupci minimiziranja funkcije =(X,Θ) osiguravaju konvergenciju samo u lokalniminimum, što znači da minimizacijom dobivene vrijednosti parametara ne moraju bitijednake optimalnim vrijednostima Θ∗. Međutim, za većinu praktičnih primjena nijeniti nužno pronaći parametre koji daju globalni minimum, već se zadovoljavajućomsmatraju bilo koje vrijednosti parametara za koje kriterijska funkcija poprima dovoljnomali iznos, tj. za koje vrijedi:
=(X,Θ) ≤ ε, (3.20)
gdje je ε ∈ R mala pozitivna konstanta.Dva su osnovna načina minimiziranja kriterijske funkcije =(X,Θ) na kojima se
temelje algoritmi učenja neuronskih mreža: (i) nerekurzivni i (ii) rekurzivni. Premanerekurzivnom se načinu kriterijska funkcija =(X,Θ) minimizira tako da se promjene

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 18
parametara mreže akumuliraju preko svih N vektora mjernih podataka i tek nakontoga se stvarno promijene parametri mreže. Prema rekurzivnom se načinu kriterijskafunkcija =(X,Θ) minimizira na temelju lokalne kriterijske funkcije =v(X,Θ), odnosnoparametri mreže mijenjaju se nakon svakog vektora mjernih podataka.
U slučaju identifikacije modela Sunčeve dozračenosti, mjerni podatci su unaprijedpoznati pa će se prema tome za identifikaciju koristiti nerekurzivni način učenja. Većinanerekurzivnih algoritama učenja temelje se na standardnim postupcima nelinearnogoptimiranja koji minimum ciljne funkcije traže na nerekurzivan način. Ciljna funkcijakoju algoritmi učenja neuronskih mreža trebaju minimizirati jest definirana kriterijskafunkcija =(X,Θ). Algoritmi učenja minimiziraju kriterijsku funkciju podešavanjemiznosa parametara mreže Θ. Najčešće korišteni algoritmi učenja neuronskih mrežazasnivaju se na iterativnom postupku [9]:
Θk+1 = Θk + ∆Θk = Θk + αksd,k, (3.21)
gdje je sd,k smjer traženja minimuma u k-toj iteraciji koji se zasniva na informaciji ofunkciji =(X,Θ), a αk koeficijent učenja u k-toj iteraciji koji određuje duljinu korakau smjeru traženja.
Levenberg-Marquardtov algoritam zasniva se na pretpostavci da se pogreška e(X,Θ)u okolini točke Θk može dovoljno dobro aproksimirati s prva dva člana Taylorovog reda:
e(X,Θ) ≈ e(X,Θ) = e(X,Θk) + ∇e(X,Θ)|Θ=Θk∆Θk, (3.22)
pri čemu vrijedi ∆Θk = Θ−Θk.Sada se umjesto minimiziranja kriterijske funkcije iz izraza (3.15) minimizira njezina
aproksimacija definirana kao:
=(X,Θ) = 12 e>(X,Θ)e(X,Θ). (3.23)
Iz uvjeta ∇=(X,Θ) = 0 dobije se izraz koji minimizira funkciju (3.23):
J>(X,Θk)J(X,Θk)∆Θk + J>(X,Θk)e(X,Θk) = 0, (3.24)
Uvrštenjem izraza (3.17a) u izraz (3.24) uz Θ = Θk+1 te uvođenjem koeficijenta učenjaαk, dobije se sljedeći izraz za izračunavanje parametara mreže:
Θk+1 = Θk − αk(H(X,Θk)
)−1J>(X,Θk)e(X,Θk). (3.25)
U izrazu (3.25) Hessian matrica se zamijenjenjuje matricom:
H(X,Θk) = J>(X,Θk)J(X,Θk), (3.26)

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 19
koja je jednaka prvom članu Hessian matrice definirane izrazom (3.17b). MatricaH je pozitivno semidefinitna, što je dovoljan uvjet da algoritam (3.25) ne divergira.Međutim, ako mjerni podatci nisu dovoljno informativni ili ako neuronska mreža imaprevelik broj neurona, matrica H može postati loše kondicionirana, tj. skoro singularnaili singularna, što ima za posljedicu numeričku nestabilnost algoritma. Za prevladavanjeovih problema potrebno je matricu H dodatno promijeniti da se dobije pozitivnodefinitna matrica u čitavom području vrijednosti kriterijske funkcije. Iz tih razlogaizveden je novi, poboljšani izraz za izračunavanje parametara mreže [9]:
Θk+1 = Θk −[J>(X,Θk)J(X,Θk) + µkI
]−1J>(X,Θk)e(X,Θk), (3.27)
gdje parametar µk određuje veličinu promjene ∆Θ.U svakoj se iteraciji algoritma koeficijent µk određuje drugim iterativnim postupkom.
Početni iznos koeficijenta µk određuje se množenjem njegova optimalnog iznosa izprethodne iteracije algoritma koeficijentom smanjenja µd (µd < 1), tj. µk = µdµk−1,osim u prvoj iteraciji kada se koristi početna vrijednost µ0 koju zadaje korisnik. Uz tajse iznos koeficijenta µk izračunava kriterijska funkcija i uspoređuje s njezinim iznosomu prethodnoj iteraciji. Ako se iznos kriterijske funkcije smanjio, iznos koeficijentaµk smatra se optimalnim i prelazi se na sljedeću iteraciju algoritma učenja mreže,a ako se iznos kriterijske funkcije povećao, iznos koeficijenta µk povećava se iterativno,množenjem s koeficijentom povećanja µi (µi > 1) u svakom koraku, dok ne dođe dosmanjenja kriterijske funkcije.
Odabrana struktura neuronske mreže ima ukupno n(0) = 7 ulaznih signala [15],n(1) neurona u skrivenom sloju te n(2) = 1 izlazni signal koji predstavlja direktnu ilidifuznu komponentu Sunčeve dozračenosti, ovisno o modelu koji se identificira. Vektorparametara mreže u tom slučaju je definiran kao:
Θ =[ws,1,1 . . . ws,1,7, wc,1,1 . . . wc,1,7, σ1, wt,1, ws,2,1 . . . wt,n(1)+1
]>. (3.28)
Konačni izraz koji opisuje odabranu strukturu umjetne RBF neuronske mreže, izvedenna temelju izraza (3.5), (3.6), (3.7) i (3.8) je:
v2,1 =n(1)∑i=1
ψ1(v1,i, σi)wt,i + wt,n(1)+1, (3.29a)
f(X,Θ) = ψ2(v2,1). (3.29b)
pri čemu ψ1 predstavlja Gaussovu funkciju, a ψ2 može biti linearna funkcija jediničnogpojačanja ili tansig funkcija.

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 20
Uz ovako definiranu funkciju koja opisuje neuronsku mrežu, parcijalne derivacijefunkcije f(X,Θ) po parametrima i-tog neurona prema BP algoritmu su:
∂f(X,Θ)∂ws,i,k
= ∂ψ2(v2,1)∂v2,1
∂v2,1∂v1,i
∂v1,i
∂ws,i,k, k = 1, ..., 7,
∂f(X,Θ)∂wc,i,k
= ∂ψ2(v2,1)∂v2,1
∂v2,1∂v1,i
∂v1,i
∂wc,i,k, k = 1, ..., 7,
∂f(X,Θ)∂σi
= ∂ψ2(v2,1)∂v2,1
∂v2,1∂σi
,∂f(X,Θ)∂wt,i
= ∂ψ2(v2,1)∂v2,1
∂v2,1∂wt,i
.
(3.30)
Uzme li se u obzir normiranje ulazno-izlaznih podataka, tada se parcijalne derivacijepogreške e(Xi, Θ) po parametrima mreže mogu izračunati kao:
∂e(Xi, Θ)∂Θ
=τ∑j=0
[kjµ
∂f(xi,j , Θ)∂Θ
]. (3.31)
Početne vrijednosti parametara neuronske mreže u velikoj mjeri utječu na brzinukonvergencije algoritma učenja, osobito u slučajevima kada se neuronska mreža koristiza aproksimaciju vrlo složenih nelinearnih funkcija. Velika slabost opisanog algoritmaučenja, kao i svih ostalih gradijentnih algoritama, je pojava lokalnih minimuma ukriterijskoj funkciji. Kako bi se smanjila pojava lokalnih minimuma, središta i varijanceneurona treba izabrati tako da čitavo područje vrijednost ulaznih signala bude pokrivenoaktivnim dijelovima RBF neurona te da svaki pojedini neuron ima svoje potpodručje.Uobičajeno se središta raspoređuju slučajno u području vrijednosti ulaznih signala,koji se normiraju tako da poprime vrijednost unutar jednakih intervala. Nakon toga seizračunaju varijance neurona prema sljedećem izrazu [9]:
σi =√di,1di,2, i = 1, ..., n(1), (3.32)
gdje su d1,i i d2,i udaljenosti dva najbliža neurona od i-tog neurona. Sinaptički težinskikoeficijenti ulaznog i izlaznog sloja izabiru se kao slučajno generirani brojevi, obično uintervalu (−0.5, 0.5).
3.2.3 Algoritam roja čestica
Algoritam roja čestica8 otkriven je sasvim slučajno, pri pokušaju da se na računalusimulira kretanje jata ptica. Ovaj algoritam spada u skupinu populacijskih algoritama,pri čemu se populacija sastoji od niza jedinki (čestica) koje lete kroz višedimenzijskiprostor koji pretražuju [16]. Pri tome pojedine čestice svoj položaj mijenjaju temeljemvlastitog iskustva te iskustva bliskih susjeda, čime se modeliraju socijalne interakcije
8engl. Particle Swarm Optimization algorithm (PSO)

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 21
između jedinki. Prilikom određivanja smjera kretanja, svaka jedinka u određenojmjeri uzima u obzir svoje do tada najbolje pronađeno rješenje (individualni faktor),te najbolje pronađeno rješenje svoje bliske okoline (socijalni faktor). Utjecaj koji svakaod ovih komponenti ima uvelike određuje ponašanje same jedinke: radi li jedinkaistraživanje prostora (ukoliko je dominantan individualan faktor) ili fino podešavanjepronađenog rješenja (ukoliko je dominantan socijalan faktor). Na ovaj način samalgoritam kombinira globalno pretraživanje prostora stanja te lokalnu pretragu kojomse obavlja fino podešavanje rješenja.
Algoritam započinje inicijalizacijom populacije unaprijed zadane veličine i dimenzije.Svaka se čestica smješta na neku slučajno odabranu poziciju, i dodjeljuje joj se nekaslučajno odabrana brzina. Čestice pretražuju ograničeni prostor stanja, a brzina svakečestice je ograničena svojom minimalnom i maksimalnom vrijednošću. Ograničenja nabrzinu čestica često se biraju kao određeni postotak od raspona prostora stanja kojesvaka čestica pretražuje. Nakon inicijalizacije populacije slijedi glavni dio algoritma,koji se ponavlja tako dugo dok se ne ispuni uvjet zaustavljanja [16]:
1. Za svaku se česticu izračuna vrijednost funkcije u točki koju čestica predstavlja.
2. Za svaku se česticu provjeri njeno do tada zapamćeno najbolje rješenje xpb,i i njenonovo pronađeno rješenje xi,g, gdje indeks i stoji za redni broj čestice u populaciji,a indeks g za trenutnu generaciju algoritma. Ako je novo rješenje bolje, pamti sekao novo najbolje rješenje te čestice.
3. U čitavoj populaciji se pronađe najbolje rješenje xgb, i ako je prethodno zapamćenoglobalno rješenje lošije, ažurira se na novo pronađeno.
4. Za svaku česticu se obavlja ažuriranje trenutne brzine vi,g a potom i trenutnogpoložaja xi,g. Ažuriranje brzine obavlja se tako da se na trenutnu brzinu dodaindividualna komponenta modulirana faktorom individualnosti (c1) i slučajnogeneriranim brojem r1 iz intervala (0, 1) te socijalna komponenta moduliranafaktorom socijalnosti (c2) i slučajno generiranim brojem r2 iz intervala (0, 1):
vi,g = vi,g−1 + c1r1(xpb,i − xi,g−1) + c2r2(xgb − xi,g−1), (3.33)
gdje je xpb,i najbolje rješenje i-te čestice, xi,g−1 je rješenje i-te čestice iz prošlegeneracije, a xgb je najbolje rješenje ikad pronađeno. Nakon proračuna novebrzine čestice vrši se korigiranje brzine tako da nova brzina bude u skladu spostavljenim ograničenjima. Ukoliko se ne postave ograničenja na brzinu čestica,riskira se mogućnost divergencije algoritma.

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 22
5. Konačno, u skladu s novom brzinom ažurira se trenutni položaj čestice:
xi,g = xi,g−1 + vi,g, (3.34)
Faktori c1 i c2 uobičajeno se postavljaju na vrijednost 2. Veća vrijednost faktora c1
omogućit će veći stupanj individualnosti jedinke i time poticati istraživanje prostora,dok veća vrijednost faktora c2 jači naglasak stavlja na najbolje rješenje koje je čitavkolektiv do tada pronašao i time osigurava detaljnije istraživanje okoline tog rješenja.
Proces pretraživanja prostora može se podijeliti u dva koraka. U prvom korakuse obavlja grubo pretraživanje kako bi se locirala zanimljiva područja, a potom se udrugom koraku obavlja fino pretraživanje unutar lociranih zanimljivih područja. Kakobi se osiguralo ovakvo ponašanje, izraz za ažuriranje brzine (3.33) modificira se nasljedeći način:
vi,g = w(t)vi,g−1 + c1r1(xpb,i − xi,g−1) + c2r2(xgb − xi,g−1), (3.35)
gdje je w(t) inercijska komponenta brzine. Inicijalno se inercijska komponenta postavljana vrijednost 1, a s povećanjem broja iteracija t vrijednost se smanjuje prema nekojminimalnoj vrijednosti. Ako s wmax i wmin označimo željenu maksimalnu i minimalnuvrijednost inercijske komponente te s T označimo iteraciju u kojoj inercijska komponentatreba pasti na wmin, za ažuriranje inercijske komponente može se koristiti sljedeći izraz:
w(t) =
wmax − tT (wmax − wmin), t ≤ T,
wmin, t > T.(3.36)
Jedan od načina osiguravanja numeričke stabilnosti algoritma u smislu da se spriječidivergencija, jest ograničavanje iznosa brzine čestica. Matematička analiza algoritmaroja čestica [13] pokazuje da se stabilnost može postići ako se izraz za ažuriranje brzine(3.35) modificira dodavanjem faktora ograničenja9:
vi,g = K(w(t)vi,g−1 + c1r1(xpb,i − xi,g−1) + c2r2(xgb − xi,g−1)
), (3.37)
gdje je K faktor ograničenja koji je funkcija faktora individualnosti c1 i socijalnogfaktora c2, definirana sljedećim izrazom:
K = 2∣∣∣2− φ−√φ2 − 4φ∣∣∣ , (3.38)
pri čemu se parametar φ može izračunati kao φ = c1 + c2 uz φ > 4.9engl. Constriction factor

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 23
Prednost algoritma roja čestica u odnosu na Levenberg-Marquardtov algoritam je utome što algoritam roja čestica ne zahtjeva proračun gradijenta kriterijske funkcije, pas obzirom na to kriterijska funkcija ne treba nužno biti kontinuirana i diferencijabilna.Još jedna od bitnih prednosti je što konvergencija populacijskih algoritama ne ovisio početnim vrijednostima parametara, odnosno takvi algoritmi su otporniji na pojavulokalnih minimuma. Veliki nedostatak populacijskih algoritama u odnosu na gradijentneje vrijeme potrebno za učenje neuronske mreže.
3.3 Rezultati identifikacije
Učenje neuronske mreže se provelo na prošlim meteorološkim podatcima i mjerenjimaSunčeve dozračenosti, koji su preuzeti iz NSRDB baze podataka za lokaciju WashingtonDC Dulles Intl. Airport, u periodu 1996.–2005. godine. Ulazni podatci potrebni zaučenje modela su [15]: (i) zenitni kut Sunca, (ii) lokalni tlak zraka, (iii) temperaturazraka, (iv) debljina stupca vodene pare, (v) optička debljina aerosola, (vi) totalnanaoblaka i (vii) neprozirna naoblaka. Sunčeva insolacija dostupna u NSRDB bazipodataka mjerena je u intervalima od jednog sata. Ova činjenica mora se uzeti u obzirjer je cilj identifikacije dobivanje trenutnog modela Sunčeve dozračenosti, koji će natemelju trenutnih meteoroloških podataka proračunati trenutnu Sunčevu dozračenost.Iz tog razloga je izvršena linearna interpolacija ulaznih meteoroloških podataka kakobi se dobila rezolucija mjerenja ulaznih podataka od jedne minute. Trenutni zenitnikut Sunca može se proračunti pomoću posebnih funkcija, pa za taj ulazni podatak nijeprimijenjena linearna interpolacija. Radi numeričke stabilnosti, ulazni i izlazni podatcineuronske mreže normirani su na interval (−1, 1).
Prije postupka učenja neuronske mreže izvršeno je i filtriranje nekvalitetnih mjerenjaprema sljedećem kriteriju:
0.95II,t ≤ II,b cos θz + II,d ≤ 1.05II,t, (3.39)
pri čemu je II,t ukupna Sunčeva insolacija, II,b direktna komponenta insolacije, II,ddifuzna komponenta insolacije, a θz zenitni kut Sunca. Ukoliko uvjet iz izraza (3.39)nije zadovoljen, podatci se karakteriziraju kao nekvalitetni te se odbacuju.
Za svaku komponentu Sunčeve dozračenosti (direktna i difuzna) identificirani suzasebni modeli. Pri tome su isprobane kombinacije s purelin i tansig aktivacijskomfunkcijom u izlaznom sloju, a radi jednostavnosti prikazani su rezultati samo najboljeidentifikacije. Podatci za validaciju su uzeti za lokaciju WDC Dulles u periodu od

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 24
2004. do 2005. godine te su filtrirani na isti način kao i podatci za učenje. Kvalitetaidentificiranih modela provjerena je tzv. MBE10 i RMSE11 pokazateljima kvalitete, akoji su definirani kako slijedi:
MBE = 1N
N∑i=1
ei, (3.40a)
RMSE =
√√√√ 1N
N∑i=1
e2i . (3.40b)
Postupak učenja neuronske mreže proveden je ukupno 40 puta, po 20 učenja zasvaku komponentu Sunčeve dozračenosti. Od tih 20 učenja, po 10 učenja je obavljenoLevenberg-Marquardtovim algoritmom, odnosno algoritmom roja čestica. Od tih 10učenja, po 5 učenja je rezervirano za purelin funkciju, odnosno tansig funkciju kaoaktivacijsku funkciju izlaznog sloja. U Tablici 3.1 su prikazani iznosi kriterijske funkcijei pokazatelja kvalitete za identificirane modele na podatcima za validaciju. Dobivenirezultati su uspoređeni s već razvijenim METSTAT [5] modelom direktne i difuznekomponente Sunčeve dozračenosti.
Na Slici 3.5 prikazani su najbolji rezultati dobiveni identifikacijom modela direktnei difuzne Sunčeve dozračenosti. Oba identificirana modela dobivena su primjenomRBF neuronske mreže s 10 neurona uz Levenberg-Marquardtov algoritam učenja, akao aktivacijska funkcija izlaznog sloja primijenjena je tansig funkcija.
0 100 200 300 400 500 600 700 800 900 1000 1100 12000
100
200
300
400
500
600
700
800
900
1000
1100
1200MBE = −25.7737 W/m2, RMSE = 163.5497 W/m2
Direktna dozracenost, model [W/m2]
Dire
ktna
doz
race
nost
, mje
rena
[W/m
2]
0 50 100 150 200 250 300 350 400 450 500 550 6000
50
100
150
200
250
300
350
400
450
500
550
600MBE = −2.9021 W/m2, RMSE = 66.721 W/m2
Difuzna dozracenost, model [W/m2]
Difu
zna
dozr
acen
ost,
mje
rena
[W/m
2]
Slika 3.5: Validacija identificiranog modela direktne i difuzne Sunčeve dozračenosti10engl. Mean Bias Error (MBE)11engl. Root Mean Square Error (RMSE)

Poglavlje 3. Identifikacija modela Sunčeve dozračenosti 25
Iako neuronska mreža s purelin aktivacijskom funkcijom u izlaznom sloju takođerpokazuje dobre rezultate prema pokazateljima kvalitete, takva struktura ima jedanveliki nedostatak. Spomenuti se nedostatak očituje u nemogućnosti purelin funkcijeda ograniči izlaz neuronske mreže, pa je tada moguća pojava i negativnih vrijednostiSunčeve dozračenosti što nikako nije poželjna karakteristika. Iz ovog razloga odlučenoje kako će se za konačni model komponenti Sunčeve dozračenosti koristiti tansig funkcijau izlaznom sloju.
Tablica 3.1: Pokazatelji kvalitete razvijenih modelaModel Direktna dozračenost Difuzna dozračenost
= (×108) MBE RMSE = (×107) MBE RMSE
1.1761 −25.6279 165.4891 2.5391 −5.1662 66.7269RBF, 10n 1.1983 −27.2720 165.7139 2.5260 −3.9867 67.4139Purelin 1.2082 −24.9388 165.2075 2.4263 −4.6208 68.4142LM 1.1707 −26.2381 165.6201 2.4984 −4.1755 67.6829
1.3030 −23.4529 169.3227 2.4405 −3.0686 67.4578
1.1656 −23.3691 165.1161 3.1043 −4.4252 74.2456RBF, 10n 1.1880 −25.7737 163.5497 2.5549 −2.7800 67.3020Tansig 1.1828 −24.9553 165.3115 2.5514 −6.9510 66.8821LM 1.1636 −28.4300 164.8261 2.5387 −2.9021 66.7210
1.1850 −30.0450 166.2463 2.4665 −3.8577 67.8901
1.5872 −19.5273 179.0578 3.8856 −6.7923 83.2406RBF, 10n 1.5995 −18.9864 181.9838 3.6291 −5.3842 77.2070Purelin 1.5603 −19.1317 173.8650 3.2856 −4.2086 77.7330PSO 1.5703 −22.6815 174.8505 3.4642 −6.0770 77.1465
1.6243 −19.9475 180.3448 3.5532 −8.3129 80.8132
1.5631 −27.9226 179.2255 3.6842 −10.8418 79.6770RBF, 10n 1.5432 −27.7690 175.4609 3.8250 −12.0965 84.2719Tansig 1.5631 −27.9226 179.2255 3.5318 −8.2761 77.4146PSO 1.5430 −32.5004 176.4601 3.6363 −7.9937 80.8033
1.6042 −27.3062 181.8798 3.8008 −9.4354 82.7157
METSTAT −56.6900 213.4500 172.0800 82.5000
*Sve vrijednosti pokazatelja kvalitete MBE i RMSE mjerene su u jedinici Wm−2.

Poglavlje 4
Proizvodnja električne energijefotonaponskog pretvornika
Energija Sunčeva zračenja se može koristiti za zagrijavanje nekog medija ili direktno zaproizvodnju električne energije korištenjem fotonaponskih pretvornika. Učinkovitostpretvorbe energije Sunčeva zračenja u električnu energiju iznosi od 10% za jeftinijeizvedbe s amorfnim silicijem, do 25% za skuplje izvedbe. Uzmemo li u obzir da Sunceu samo jednoj sekundi oslobodi više energije nego što je naša civilizacija tijekom svojegrazvoja iskoristila, važnost istraživanja energije Sunca i pretvorbe Sunčeva zračenjau električnu, toplinsku ili energiju hlađenja poprima sasvim novu dimenziju [12]. Uprošlosti su se fotonaponski pretvornici uglavnom koristili na mjestima gdje nije biladostupna komercijalna električna mreža. Poboljšanje učinkovitosti pretvorbe energije,kao i razvoj različitih algoritama za upravljanje takvim sustavima dovelo je do izgradnjeprvih komercijalnih elektrana temeljenih na fotonaponskim pretvornicima. U ovojcjelini je razvijen dinamički termički model fotonaponskog panela na temelju kojeg ćese provesti simulacije proizvodnje električne energije u stohastičkom okruženju tokomtri reprezentativna dana: (i) vedro, (ii) djelomično i (iii) potpuno oblačno nebo.
4.1 Sunčeva dozračenost na nagnutu plohu
Proizvodnja električne energije fotonaponskog pretvornika u najvećoj mjeri ovisi oupadnoj Sunčevoj dozračenosti. Postoji velik broj već razvijenih modela za proračundozračenosti na nagnutu plohu, na temelju poznate direktne i difuzne komponenteSunčeve dozračenosti. Česta pretpostavka pri estimaciji Sunčeve dozračenosti na nagutuplohu jest da difuzna komponenta dozračenosti ima izotropnu distribuciju na nebu
26

Poglavlje 4. Proizvodnja električne energije fotonaponskog pretvornika 27
[17]. Međutim, pokazano je kako difuzna komponenta dozračenosti ima anizotropnudistribuciju na nebu, pa stoga pretpostavka izotropne distribucije može unijeti značajnepogreške u estimaciju dozračenosti na nagnutu plohu. Ukupna dozračenost na nagnutuplohu It,T sastoji se od tri glavne komponente: (i) direktna komponenta Ib,T , (ii) difuznakomponenta Id,T te (iii) reflektirajuća komponenta Ir,T [17]:
It,T = Ib,T + Id,T + Ir,T . (4.1)
Ako se pretpostavi da difuzna komponenta ima anizotropnu distribuciju, pojedinekomponente Sunčeve dozračenosti na nagnutu plohu mogu se izračunati kao:
Ib,T = Ib cos θ,Id,T = Id cos2 β
2 [1 + F sin3 β2 ][1 + F cos2 θ sin3 θz],
Ir,T = ρ(Ib cos θz + Id) sin2 β2 ,
(4.2)
gdje je It ukupna Sunčeva dozračenosti, Ib je direktna komponenta dozračenosti, Idje difuzna komponenta dozračenosti, θ je kut između smjera Sunca i normale nagnuteplohe, θz je zenitni kut Sunca, β je kut nagnutosti plohe nad horizontalnom plohom, ρje albedo tla, a F je modulacijska funkcija definirana kao:
F = Ib cos θzIb cos θz + Id
. (4.3)
U slučaju kada je difuzna dozračenost dominantna komponenta, tada anizotropni modelprelazi u izotropni model.
S
Zenit
Normala nahorizont
Normala nanagnutu plohu
W
S
N
Eγ
βθ
θz
Slika 4.1: Nagnuta ploha u prostoru [10]

Poglavlje 4. Proizvodnja električne energije fotonaponskog pretvornika 28
Kut između smjera Sunca i normale nagnute plohe može se izraziti kao [10]:
cos θ = cos θz cosβ + sin θz sin β cos(γs − γ), (4.4)
gdje je γs azimutni kut Sunca, a γ je azimutni kut nagnute plohe, tj. kut između pravcajuga i projekcije normale nagnute plohe na horizontalno položenu plohu.
Za fiksno postavljene fotonaponske panele na sjevernoj hemisferi, optimalan kutnagiba nad horizontalnom podlogom jednak je geografskoj širini lokacije na kojoj senalazi, a optimalan azimutni kut panela podudara se sa smjerom juga [12].
4.2 Dinamički termički model fotonaponskog panela
Temperatura fotonaponskog panela funkcija je velikog broja varijabli i parametara, odkojih se posebno ističu fizikalna svojstva materijala od kojih je panel sačinjen, dimenzijapanela, vremenske prilike kao i okolina u kojoj se panel nalazi. Jednostavan statičkimodel fotonaponskog panela ne može dati zadovoljavajuće rezultate tijekom periodanagle promjene dozračenost te je iz tog razloga potrebno definirati dinamički model.
Temperatura panela estimira se na temelju izmjene topline fotonaponskog panela injegove okoline. Sva tri tipa prijenosa topline se trebaju uzeti u obzir [2]: (i) kondukcija,(ii) konvekcija i (iii) zračenje. Energija se iz fotonaponskog panela također uzima i uobliku generirane električne energije. Na Slici 4.2 je prikazana načelna shema izmjenetopline između fotonaponskog panela i okoline.
Sunčevadozračenost
FOTONAPONSKI PANEL
KonvekcijaDugovalno
zračenje
TERET
qswqlw
qconv
qconv
Pout
Slika 4.2: Izmjena topline između fotonaponskog panela i okoline
Pri definiranju modela pretpostavljeno je da zračenje i strujanje s prednje i zadnjestrane panela imaju veliki doprinos, dok se zanemaruje toplina koja se odvodi prekokonstrukcije panela zbog malih dodirnih površina [2]. Fotonaponski panel sastoji se od

Poglavlje 4. Proizvodnja električne energije fotonaponskog pretvornika 29
ukupno tri sloja materijala: (i) prednje staklo, (ii) silicijske fotonaponske ćelije te (iii)pozadinski sloj Polyester/Tedlar trilaminate. Zbog jednostavnosti pretpostavljeno jeda je temperatura kroz sva tri sloja jednaka. Uz ovu pretpostavku, toplinski kapacitetpanela predstavlja zbroj toplinskih kapaciteta svih slojeva:
Cp =∑m
AmdmρmCm, (4.5)
gdje je Am površina sloja, dm je debljina sloja, ρm je gustoća sloja, a Cm je specifičnitoplinski kapacitet sloja.
Kratkovalno zračenje
Efektivna dozračenost koja dolazi do površine fotonaponskog panela funkcija je direktnei difuzne Sunčeve dozračenosti te koeficijenta apsorpcije panela. Kratkovalno zračenjemože se opisati sljedećim izrazom:
qsw = α · It,T ·A, (4.6)
gdje je α koeficijent apsorpcije panela, a A je površina panela.Koeficijent apsorpcije je funkcija orijentacije i konfiguracije fotonaponskog panela,
apsorpcijskih i refleksijskih svojstava konstrukcijskih materijala, površinskog stakla itd.Poznato je da za silicijske ćelije oko 77% fotona ima dovoljan energetski prag da bi biliapsorbirani. U praksi se koeficijent apsorpcije mijenja u rasponu 20–30% ovisno opoziciji Sunca ako je fotonaponski panel fiksiran [2]. Zbog jednostavnosti je uzeto dakoeficijent apsorpcije iznosi 0.7.
Dugovalno zračenje
Dugovalno zračenje po jedinici površine definirano je Stefan-Boltzmannovim zakonom.Pretpostavljeno je da je temperatura pozadine panela približno jednaka temperaturizgrade na kojoj se nalazi, pa stoga nema efektivne razmjene dugovalnog zračenja izmeđupozadine panela i zgrade. Prema tome potrebno je izračunati dugovalno zračenjeprednje strane panela. Iznos zračenja ovisi o kutu nagnutosti panela nad horizontalnompodlogom, a može se opisati sljedećim izrazom:
qlw = A · σ ·(cos2 β
2 εnT4n − εpT 4
p
), (4.7)
gdje je εn koeficijent emisije neba, εp je koeficijent emisije panela, Tn je apsolutnatemperatura neba, Tp je apsolutna temperatura panela, σ je Stefan-Boltzmannovakonstanta, a β je kut nagnutosti panela nad horizontalnom podlogom.

Poglavlje 4. Proizvodnja električne energije fotonaponskog pretvornika 30
U slučaju vedrog neba, koeficijent emisije neba iznosi εn = 0.95 a temperatura nebamože se aproksimirati sljedećim izrazom [2]:
Tn = Ta − 20, (4.8)
gdje je Ta temperatura zraka. U slučaju oblačnog neba, koeficijent emisije neba iznosiεn = 1.0 a temperatura neba tada je jednaka temperaturi zraka, Tn = Ta.
Konvekcija
Konvekcija je kombinacija prirodne i prisilne konvekcije. U danima kada nema vjetra,prirodna konvekcija imat će glavnu ulogu pri odvođenju topline s površine panela, a uslučaju postojanja vjetra dominirat će prisilna konvekcija.
Koeficijent prirodne konvekcije često se definira raznim aproksimacijama. Jedna odaproksimacija definirana je sljedećim izrazom [2]:
hc,free = 1.31 3√Tp − Ta. (4.9)
Prirodna konvekcija dominira pretežno na stražnjoj strani fotonaponskog panela koja jezaštićena od utjecaja vjetra, odnosno s obje strane panela u danima kada nema vjetra.
Koeficijent prisilne konvekcije teško je odrediti analitički. Razni autori su se bavilis ovim problemom, a u ovom radu se koristi Nortonova aproksimacija [8]:
hc,forced = 5.67 + 3.86v, (4.10)
gdje je v brzina vjetra mjerena u ms−1.U prosječnom danu toplina predana konvekcijom određena je sumom slobodne i
prisilne konvekcije:
qconv = −A(Tp − Ta
)(hc,free + hc,forced
). (4.11)
Izlazna snaga fotonaponskog panela
Izlazna snaga također predstavlja oblik odvođenja topline, a modelira se tzv. faktorompopunjenosti1, koji predstavlja omjer maksimalne dobivene snage i umnoška strujekratkog spoja i napona praznog hoda u normalnim radnim uvjetima. Izlazna snagafotonaponskog panela aproksimira se s [2]:
Pout = CFFIt,T ln(k1It,T )
Tp, (4.12)
gdje je k1 jedan od parametara fotonaponskog panela.1engl. Fill Factor, (FF)

Poglavlje 4. Proizvodnja električne energije fotonaponskog pretvornika 31
Dinamički termički model fotonaponskog panela
Kombinacijom definiranih tipova prijenosa topline dolazi se do konačnog matematičkogmodela koji opisuje dinamiku fotonaponskog panela:
CpdTpdt
= qsw + qlw + qconv − Pout. (4.13)
Na temelju ovako razvijenog dinamičkog termičkog modela fotonaponskog pretvornikaprovest će se simulacije proizvodnje električne energije tokom tri reprezentativna dana:(i) vedro, (ii) djelomično i (iii) potpuno oblačno nebo.
4.3 Modeliranje stohastičkog okruženja
Razvijeni modeli direktne i difuzne Sunčeve dozračenosti, kao i ulazni meteorološkipodatci, sadrže određenu nesigurnost koju je potrebno modelirati kako bi se dobilarealnija slika o stvarnom sustavu. U tu svrhu primijenjena je metoda za proračunstatistike slučajne varijable koja podliježe nekoj nelinearnoj funkciji, tzv. Unscentedtransformacija [4]. Navedena metoda sastoji se od proračuna tzv. sigma vektora injihovih propagacija kroz nelinearnu funkciju, nakon čega se dobiju izlazni vektori izkojih se proračunavaju očekivanje i varijanca izlazne varijable.
Pretpostavimo da se promatra propagacija slučajne L-dimenzionalne varijable xkroz nelinearnu funkciju y = f(x) i neka slučajna varijabla x ima očekivanje x ivarijancu Px. Da bi se izračunala statistika od y formira se matrica χ koja sadrži2L+ 1 sigma vektora χi kako slijedi:
χ0 = x,χi = x +
(√(L+ λ)Px
)i, i = 1, . . . , L,
χi = x−(√
(L+ λ)Px)i−L
, i = L+ 1, . . . , 2L,(4.14)
gdje je λ = (α2(L+ κ)−L) faktor skaliranja. Konstanta α određuje raspršenost sigmavektora oko očekivane vrijednosti ulazne varijable x, i obično se postavlja na neku malupozitivnu vrijednost [4]:
10−4 ≤ α ≤ 100
Konstanta κ predstavlja sporedni faktor skaliranja, i obično se postavlja na vrijednostκ = 3−L. Dodano se koristi i parametar β koji služi za objedinjavanje znanja o prošlimdistribucijama slučajne varijable x. Član
(√(L+ λ)Px
)ipredstavlja i-ti stupac donje
trokutaste Chloesky faktorizacije matrice (L+ λ)Px.

Poglavlje 4. Proizvodnja električne energije fotonaponskog pretvornika 32
Tako formirani sigma vektori se propagiraju kroz nelinearnu funkciju, nakon čegase dobiju izlazni vektori:
Y i = f(χi), i = 0, . . . , 2L, (4.15)
gdje se očekivanje i varijanca izlazne varijable y aproksimiraju koristeći otežane uzorkeočekivanja i varijanci a posteriori sigma vektora:
y ≈2L∑i=0
W(m)i Y i, (4.16a)
Py ≈2L∑i=0
W(c)i (Y i − y)(Y i − y)>, (4.16b)
pri čemu su težinski koeficijenti W (m)i i W (c)
i određeni sljedećim izrazima:
W(m)0 = λ
L+λ ,
W(c)0 = λ
L+λ + (1− α2 + β),W
(m)i = W
(c)i = 1
2(L+λ) , i = 1, . . . , 2L.(4.17)
Nesigurnost meteoroloških podataka modelirana je kao odstupanje od očekivanevrijednosti u intervalu ± 5% na početku predikcijskog horizonta, do ± 20% na krajupredikcijskog horizonta, uz linearan porast odstupanja. Za vrijeme kada je totalnanaoblaka u intervalu 20–80%, nesigurnost tog meteorološkog podatka modelira se kaoodstupanje od očekivane vrijednosti u intervalu ± 20% bez porasta nesigurnosti tokompredikcijskog horizonta, a navedeno vrijedi i za neprozirnu naoblaku.
Nesigurnost modela Sunčeve dozračenosti izvedena je u obliku ćelije s rezolucijom od20 Wm−2. Pronalaze se svi parovi direktne i difuzne komponente Sunčeve dozračenostikoji pripadaju pojedinoj ćeliji, nakon čega se proračunavaju sistemska pogreška2 ivarijanca za svaku ćeliju zasebno. Sistemska pogreška ćelije ebd,i definirana je kaovektor koji sadrži srednju vrijednost sistemske pogreške direktne i difuzne dozračenosti:
ebd,i =[
1n
∑nk=1 eb,i,k
1n
∑nk=1 ed,i,k
]>, (4.18)
gdje je n broj parova vrijednosti direktne i difuzne dozračenosti koje pripadaju i-tojćeliji, a eb,i,k i ed,i,k su sistemske pogreške k-tog uzorka koje se mogu proračunatiprimjenom relacije (3.11). Matrica varijanci i-te ćelije proračunava se na sljedeći način:
Pbd,i =n∑k=1
(ymdl − ebd,i − ymeas)(ymdl − ebd,i − ymeas)>, (4.19)
2engl. Bias

Poglavlje 4. Proizvodnja električne energije fotonaponskog pretvornika 33
gdje je ymdl vektor direktne i difuzne Sunčeve dozračenosti dobiven razvijenim modelom,a ymeas vektor direktne i difuzne Sunčeve insolacije iz NSRDB baze. Izlaz razvijenihmodela Sunčeve dozračenosti je u minutnoj rezoluciji, a mjerena insolacija dostupna uNSRDB bazi je u satnoj rezoluciji. Kako bi se ta dva uzorka mogla usporediti izvršenaje numerička integracija minutnih uzoraka tokom sata. Pripadnost k-tog satnog uzorkapojedinoj ćeliji nesigurnosti određuje se na temelju minutnog uzorka koji se nalazi usredini unutar tog sata.
Nakon provlačenja ulaznih meteoroloških podataka kroz Unscented transformaciju(L = 7), na izlazu se dobiju vektori direktne i difuzne komponente Sunčeve dozračenosti.Uz poznat model nesigurnosti komponenata Sunčeve dozračenosti, od svakog vektoraSunčeve dozračenosti stvara se novih 5 dvodimenzionalnih sigma vektora dozračenosti(direktne i difuzne) koji će biti ulazi u nelinearni model koji opisuje Sunčevu dozračenostna nagnutu plohu. Tim postupkom dobiva se 75 ulaznih sigma vektora u nelinearnimodel dozračenosti na nagnutu plohu. Za svaki sigma vektor se proračunava Sunčevadozračenost na nagnutu plohu, a očekivanje i varijanca dozračenosti na nagnutu plohupotom se proračunavaju primjenom relacija (4.16) pri čemu se koristi vrijednost L′ = 37.
4.4 Rezultati simulacije razvijenog modela
Obavljene su simulacije rada dinamičkog termičkog modela fotonaponskog pretvornikau stohastičkom okruženju, za tri reprezentativna dana: (i) vedro, (ii) djelomično oblačnoi (iii) potpuno oblačno nebo.
Na Slici 4.3 je prikazan centralni vektor Sunčeve dozračenosti (direktna i difuzna)za sva tri razmatrana reprezentativna dana. Može se primijetiti kako je za vrijemevedrog dana direktna komponenta dozračenosti dominantna, dok je za vrijeme potpunooblačnog dana difuzna komponenta dozračenosti dominantna. Za vrijeme djelomičnooblačnog dana niti jedna od komponentni nije dominantnije izražena.
Na Slici 4.4 su prikazani rezultati simulacije modela proizvodnje električne energijefotonaponskog panela u stohastičkom okruženju. Srednja krivulja predstavlja očekivanjeizlazne električne snage fotonaponskog panela, a rubne krivulje nalaze se na udaljenostiσ od krivulje očekivane izlazne snage, gdje je σ standardno odstupanje od očekivaneizlazne snage. Za vedrog dana fotonaponski panel isporučuje najviše električne energije,što je i očekivano s obzirom da je dominantna direktna komponenta dozračenosti.Također je vidljivo kako za vrijeme djelomično oblačnog dana proizvodnja električneenergije počinje rasti onda kada počinje rasti i direktna komponenta dozračenosti.

Poglavlje 4. Proizvodnja električne energije fotonaponskog pretvornika 34
07:00 08:00 09:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:000
200
400
600
800
1000
1200
Vrijeme − t [h]
Doz
race
nost
− I
[W/m
2]
Direktna dozracenostDifuzna dozracenost
07:00 08:00 09:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:000
200
400
600
800
1000
1200
Vrijeme − t [h]
Doz
race
nost
− I
[W/m
2]
Direktna dozracenostDifuzna dozracenost
07:00 08:00 09:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:000
200
400
600
800
1000
1200
Vrijeme − t [h]
Doz
race
nost
− I
[W/m
2]
Direktna dozracenostDifuzna dozracenost
Slika 4.3: Komponente Sunčeve dozračenosti za pojedini reprezentativni dan: (i) vedro,(ii) djelomično oblačno i (iii) potpuno oblačno nebo
07:00 08:00 09:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:000
20
40
60
80
Vrijeme − t [h]Elek
tric
na s
naga
− P
out [
W]
07:00 08:00 09:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:000
20
40
60
80
Vrijeme − t [h]Elek
tric
na s
naga
− P
out [
W]
07:00 08:00 09:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:000
20
40
60
80
Vrijeme − t [h]Elek
tric
na s
naga
− P
out [
W]
Slika 4.4: Električna snaga fotonaponskog panela za pojedini reprezentativni dan

Poglavlje 4. Proizvodnja električne energije fotonaponskog pretvornika 35
Na Slici 4.5 je prikazana temperatura fotonaponskog panela za sva tri razmatranareprezentativna dana. Može se primijetiti kako u dobivenim odzivima nema skokovaza razliku od odziva koji predstavljaju izlaznu snagu panela. Termički model panelaima određenu dinamiku, pa nagla promjena Sunčeve dozračenosti ili nekog drugogmeteorološkog ulaznog podatka ne može skokovito promijeniti temperaturu panela, zarazliku od izlazne električne snage.
07:00 08:00 09:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:00260
280
300
320
Vrijeme − t [h]
Tem
pera
tura
− T
m [K
]
07:00 08:00 09:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:00260
280
300
320
Vrijeme − t [h]
Tem
pera
tura
− T
m [K
]
07:00 08:00 09:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:00260
280
300
320
Vrijeme − t [h]
Tem
pera
tura
− T
m [K
]
Slika 4.5: Apsolutna temperatura fotonaponskog panela za pojedini reprezentativni dan
U Tablici 4.1 su prikazani fizikalni parametri razmatranog fotonaponskog panela.Fotonaponski panel je postavljen u fiksni položaj okrenut prema smjeru juga, a kutnagnutosti nad podlogom jednak je geografskoj širini lokacije (β = 38.830◦).
Tablica 4.1: Fizikalni parametri razmatranog fotonaponskog panela
Simbol Vrijednost Opis parametra
A 0.51 Površina aktivne plohe panela, m2
Cm 2918 Toplinski kapacitet panela, Jkg−1K−1
CFF 1.22 Faktor popunjenosti, Km2
k1 107 Konstanta panela, m2W−1

Poglavlje 5
Sinteza prediktivnog upravljanjanagibom fotonaponskog panela
Ukupna dozračenost koja dolazi do fotonaponskog panela u obliku direktne i difuznekomponente može se učiniti čim većom odgovarajućim sustavom upravljanja nagibompanela. Za vedrih dana u kojima je dominantna direktna dozračenost, optimalanpoložaj fotonaponskog panela bio bi usmjeren direktno prema Suncu. Za oblačnihdana u kojima je dominantna difuzna dozračenost, optimalan položaj fotonaponskogpanela bio bi paralelan s horizontalnom podlogom. U slučajevima kada niti jednaod komponenti Sunčeve dozračenosti nije dominantnije izražena, potrebno je pronaćioptimalan plan nagiba fotonaponskog panela koji će maksimizirati upadnu dozračenost,odnosno proizvodnju električne energije. U tu svrhu primijenjen je algoritam iz porodiceevolucijskih algoritama, tzv. diferencijska evolucija. Uz predikciju Sunčeve dozračenostidobivenu na temelju razvijenog modela, algoritam diferencijske evolucije traži optimalanplan nagiba fotonaponskog panela na predikcijskom horizontu za jedan dan unaprijed ustohastičkom okruženju. Pri rješavanju postavljenog optimizacijskog problema u obzirsu uzeta i brojna ograničenja, kao i potrošnja pogonskog sustava.
5.1 Modelsko prediktivno upravljanje
Modelsko prediktivno upravljanje1 je napredna metoda upravljanja koja se počelakoristiti početkom 1980-ih godina. U početku svojeg razvoja primjena MPC metodeupravljanja bila je rezervirana samo za sustave sa sporom dinamikom, ali razvojemračunala počela je primjena i u upravljanju dinamički bržim sustavima. Ova metoda
1engl. Model Predictive Control (MPC)
36

Poglavlje 5. Sinteza prediktivnog upravljanja nagibom fotonaponskog panela 37
se temelji na poznavanju dinamičkog modela procesa, koji se najčešće dobiva raznimpostupcima identifikacije.
Prednosti MPC-a pred ostalim metodama upravljanja su: (i) svojstvo kompenzacijetransportnog kašnjenja i djelovanja poremećaja na sustav, (ii) mogućnost eksplicitnogpoštivanja ograničenja na procesne i upravljačke varijable, (iii) mogućnost iskorištavanjasaznanja o budućim vrijednostima referentne veličine itd. Međutim, složenost dobivanjaupravljačkog algoritma znatno je veća u odnosu na klasične linearne regulatore što seističe kao veliki nedostatak MPC metode upravljanja. Uz poštivanje ograničenja naprocesne i upravljačke varijable, proračun optimalnog upravljačnog zakona postaje jošzahtjevniji, ali računski zahtjevi MPC-a sve manje dolaze do izražaja s obzirom na sveveću procesnu snagu računala koji se koriste u upravljanju procesima.
Princip prediktivnog upravljanja na temelju modela ili MPC-a u svojoj je suštini vrlojednostavan. Na temelju matematičkog modela, zadanog kriterija kvalitete, ograničenjana proces i informacija o trenutačnom i željenom stanju procesa potrebno je pronaćinajbolju upravljačku sekvencu duž tzv. predikcijskog horizonta2 i primijeniti prvuvrijednost u sekvenci na proces, a ostale odbaciti. Postupak se ponavlja u svakomsljedećem koraku uzorkovanja. Vrijednost upravljačkog signala je najbolja s obziromna zadani kriterij kvalitete kojim se vrednuju predviđena stanja i ulazni signali procesau budućnosti, te se ta vrijednost obično naziva optimalnom. S obzirom da predikcijavladanja sustava ima direktan utjecaj na proračun sekvence upravljačkog signala, modelsustava mora sadržavati što vjerniji opis dinamike procesa duž predikcijskog horizonta.
Nelinearno modelsko prediktivno upravljanje3 je tip MPC metode upravljanja kojukarakterizira nelinearni model procesa. Kao i kod MPC-a s linearnim modelom procesa,NMPC zahtijeva iterativno rješavanje upravljačke sekvence duž konačnog predikcijskoghorizonta. Proračun optimalne upravljačke sekvence kod NMPC metode upravljanjaobavlja se različitim metodama optimiranja, npr. gradijentnim algoritmima, genetskimi evolucijskim algoritmima itd. Problem sinteze prediktivnog upravljanja nagibomfotonaponskog panela izrazito je kompleksan s raznim nelinearnim ograničenjima. Usvrhu proračuna optimalne upravljačke sekvence duž predikcijskog horizonta primijenjenje algoritam iz porodice evolucijskih algoritama, tzv. diferencijska evolucija. Algoritamse temelji na identificiranom modelu Sunčeve dozračenosti, a kako postoje značajnenesigurnosti koje unose ulazni meteorološki podatci i razvijeni model dozračenosti,proračun optimalne sekvence se obavio u stohastičkom okruženju.
2engl. Prediction horizon3engl. Nonlinear Model Predictive Control (NMPC)

Poglavlje 5. Sinteza prediktivnog upravljanja nagibom fotonaponskog panela 38
5.2 Diferencijska evolucija
Diferencijska evolucija4 je metoda optimizacije nelinarnih funkcija više varijabli kojaspada u skupinu evolucijskih algoritama. Prvi put se spominje 1995. godine, a odtada je stekla reputaciju vrlo efikasnog postupka za pronalazak globalnog optimumanelinearne funkcije [11]. Metoda je nastala kao pokušaj rješavanja aproksimacije funkcijaČebiševljevim polinomima. Često se koristi pri optimiranju višedimenzionalnih funkcijarealnih varijabli, pri čemu nije potrebno poznavati gradijent danog optimizacijskogproblema, za razliku od nekih klasičnih metoda optimizacije poput gradijentnih i kvazi-netwonovih metoda. Diferencijska evolucija se prema tome može koristiti i kod onihoptimizacijskih problema koji nisu kontinuirani, diferencijabilni itd.
Implementacija diferencijske evolucije se sastoji od dvije populacije vektora, pričemu svaka populacija sadrži Np D-dimenzionalnih vektora realnih vrijednosti [11].Trenutna populacija Px sadrži vektore xi koji su već prihvaćeni kao rješenja ili kaopočetni uvjeti. Nakon inicijalizacije trenutne populacije, diferencijska evolucija mutirasvaki vektor xi trenutne populacije stvarajući tako posrednu populaciju Pv mutiranihvektora vi. Nakon stvaranja posredne populacije, svaki se vektor iz trenutne populacijerekombinira sa svojim mutiranim vektorom iz posredne populacije, stvarajući takopokusnu populaciju Pu vektora ui. Tijekom rekombinacije, pokusni vektor ui seprepisuje preko mutiranog vektora vi, tako da je moguće koristiti samo jedno poljeza posrednu i pokusnu populaciju.
5.2.1 Inicijalizacija trenutne populacije
Prije inicijalizacije vektora trenutne populacije trebaju se definirati gornja i donjagranica za svaki parametar, bU i bL, tim redom. Nakon što se zadaju granice područjapretraživanja, generator slučajnih brojeva pridjeljuje svakom vektoru populacije realnevrijednosti koje se nalaze unutar zadanih granica.
Bez obzira što se za većinu praktičnih primjena pri inicijalizaciji populacije koristiisključivo generator slučajnih brojeva, u okviru postavljenog optimizacijskog problemamaksimiziranja proizvodnje električne energije fotonaponskog pretvornika, u sklopuinicijalizacije populacije ugrađena su neka heuristička znanja o ponašanju sustava:
1. 20% trenutne populacije inicijalizirano je isključivo generatorom slučajnih brojeva,poštujući zadana ograničenja prostora pretraživanja. Na ovaj način se modeliralogrubo pretraživanja prostora rješenja.
4engl. Differential Evolution (DE)

Poglavlje 5. Sinteza prediktivnog upravljanja nagibom fotonaponskog panela 39
2. 30% trenutne populacije inicijalizirano je tako da su se generatorom slučajnihbrojeva generirali vektori koji se nalaze u rasponu od ±5◦ od trajektorije gibanjaSunca, po zenitu i azimutu.
3. 30% trenutne populacije inicijalizirano je tako da su se generatorom slučajnihbrojeva generirali vektori koji se nalaze u rasponu od ±5◦ od trajektorije dobivenepronalaženjem najboljih kuteva nagiba za svaki korak pozicioniranja zasebno.Najbolji kutevi nagiba proračunali su se izjednačavanjem parcijalnih derivacijaupadne dozračenosti na fotonaponski panel po kutevima nagiba s nulom. Opisanipostupak je proveden za svaki korak pozicioniranja zasebno.
4. 20% trenutne populacije inicijalizirano je tako da su se generatorom slučajnihbrojeva generirali vektori koji se nalaze u rasponu od ±5◦ od optimalnih kutevanagiba fiksiranog fotonaponskog panela za promatrani dan. Optimalni kutevinagiba proračunati su primjenom diferencijske evolucije. U tom optimizacijskomproblemu trenutna populacija se inicijalizirala isključivo primjenom generatoraslučajnih brojeva, poštujući zadana ograničenja prostora pretraživanja.
Na opisani način inicijaliziranja populacije Px osigurano je fino i grubo pretraživanjeprostora u isto vrijeme, a postiglo se i značajno smanjenje vremena potrebnog zapronalaženje optimalnog plana nagiba fotonaponskog panela tokom promatranog dana.
5.2.2 Mutacija vektora trenutne populacije
Nakon inicijalizacije, diferencijska evolucija mutira svaki vektor trenutne populacije Px
s ciljem stvaranja populacije mutiranih vektora Pv. Mutiranje se u osnovi sastoji odskaliranja i dodavanja slučajno odabranog vektora diferencije trenutnom vektoru:
vi = xi + F (xr1 − xr2), (5.1)
gdje je F faktor skaliranja iz intervala (0, 1), a xr1 i xr2 su slučajno odabrani vektoriiz trenutne populacije koji su različiti jedan od drugog i od trenutnog vektora xi. Iakofaktor skaliranja F teoretski može biti i veći od 1.0, u praktičnim primjenama to niječest slučaj [11]. Osim ovog načina mutacije vektora, postoji još značajan broj drugihmetoda mutacija, koje se u okviru ovog rada neće razmatrati.
5.2.3 Rekombinacija vektora
Da bi se zaokružila metoda diferencijske evolucije, potrebno je još definirati i načinrekombinacije trenutnih vektora s vektorima mutantima.

Poglavlje 5. Sinteza prediktivnog upravljanja nagibom fotonaponskog panela 40
Jedna od metoda rekombinacije jest tzv. uniformno križanje5. Prema toj metodi,pokusni vektor nastaje od elemenata trenutnog vektora i vektora mutanta s određenomvjerojatnošću Cr. Za svaki element vektora se generira slučajni broj u intervalu (0, 1) teako je taj broj manji od Cr, pokusni vektor uzima element od trenutnog vektora, inačepokusni vektor uzima element od vektora mutanta. Iako ova metoda rekombinacijepokazuje dobre rezultate, uočeno je kako je za postavljeni problem prikladniji načinrekombinacije tzv. aritmetičko križanje6.
Kod metode aritmetičkog križanja, pokusni vektor nastaje kao aritmetička sredinaizmeđu trenutnog vektora i vektora mutanta:
ui = 12(xi + vi
)(5.2)
Moguća je modifikacija aritmetičkog križanja određenim težinskim koeficijentom w izintervala (0, 1), koji će pridjeljivati veću važnost trenutnom vektoru, odnosno vektorumutantu, ovisno o iznosu:
ui = wxi + (1− w)vi (5.3)
Manipulacijom težinskog koeficijenta w može se utjecati na fino i grubo pretraživanjeprostora. Za slučaj kada je w = 0.5, otežano aritmetičko križanje jednako je polaznojdefiniciji aritmetičkog križanja iz izraza (5.2).
5.3 Simulacije razvijenog algoritma upravljanja
Provedena je optimizacija trajektorije gibanja fotonaponskog panela na predikcijskomhorizontu od jednog dana unaprijed, za ukupno tri reprezentativna dana: (i) vedro,(ii) djelomično oblačno i za (iii) potpuno oblačno nebo. Optimizacija je provedenau stohastičkom i determinističkom okruženju te je napravljena usporedba proizvedeneelektrične energije na kraju dana s razvijenim sustavom praćenja i praćenja po točkama.Praćenje po točkama obuhvaća najbolju moguću trajektoriju gibanja ako se u obzirne uzme potrošnja pogonskog sustava. Simulacije su provedene uz primjenu modelafotonaponskog panela čiji su parametri dani u Tablici 4.1. Pri tome se koriste ista trireprezentativna dana analizirana u odjeljku 4.4.
Pri optimizaciji je uzeto u obzir i nelinearno ograničenje pogonskog sustava kojeuvjetuje najmanji pomak aktivne plohe panela iz mirujućeg stanja iznosa 2◦. Potrošnjapogonskog sustava panela implementirana je kao statička karakteristika [18]. Kriterijska
5engl. Uniform crossover6engl. Arithmetic crossover

Poglavlje 5. Sinteza prediktivnog upravljanja nagibom fotonaponskog panela 41
funkcija prema kojoj se vrednuje kvaliteta rješenja je definirana kao negativan iznos netoproizvedene električne energije fotonaponskog pretvornika na kraju dana:
=(β,γ) = −Eneto = −(Epv − Ec), (5.4)
gdje β i γ određuju trajektoriju gibanja aktivne plohe panela u rezoluciji od 15 min,Epv je ukupno proizvedena električna energija fotonaponskog pretvornika na krajudana, a Ec je ukupna potrošnja pogonskog sustava na kraju dana. Cilj optimizacijeje minimizacija postavljene kriterijske funkcije. Pri optimizaciji u determinističkomokruženju u obzir se uzima samo centralni vektor direktne i difuzne dozračenosti,dok se pri optimizaciji u stohastičkom okruženju uzimaju svi sigma vektori Unscentedtransformacije nakon čega se proračunava očekivanje dozračenosti na nagnutu plohu.
Za vrijeme vedrog dana optimalna trajektorija gibanja fotonaponskog panela pratipoložaj Sunca čime se zapravo pokušava maksimizirati direktna komponenta upadnedozračenosti na nagnutu plohu. Na temelju prikazanih dobivenih trajektorija gibanjapanela za vedrog dana (Slika 5.1) može se primijetiti kako ne postoji značajnija razlikaizmeđu onih trajektorija dobivenih u determinističkom i stohastičkom okruženju, a nisuvidljive značajnije razlike niti između optimalne trajektorije i trajektorije po točkama.
07:00 08:00 09:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:000
10
20
30
40
50
60
70
80
90
Vrijeme − t [h]
Kut n
agnu
tost
i − β
[deg
]
Zenitni kut (Sunce) Traj. OPT−DET Traj. OPT−STO Traj. PT−DET Traj. PT−STO FIX−DET FIX−STO
07:00 08:00 09:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:0060
90
120
150
180
210
240
270
300
330
360
Vrijeme − t [h]
Kut o
kren
utos
ti −
γ [d
eg]
Azimutni kut (Sunce) Traj. OPT−DET Traj. OPT−STO Traj. PT−DET Traj. PT−STO FIX−DET FIX−STO
Slika 5.1: Trajektorije fotonaponskog panela (vedro): OPT – optimalna trajektorija,PT – trajektorija po točkama, FIX – optimalan kut nagiba fiksnog panela, DET –determinističko okruženje, STO – stohastičko okruženje

Poglavlje 5. Sinteza prediktivnog upravljanja nagibom fotonaponskog panela 42
Za vrijeme djelomično oblačnog dana optimalna trajektorija gibanja fotonaponskogpanela samo djelomično prati položaj Sunca, što je posljedica veće zastupljenosti difuznekomponente dozračenosti. Na temelju prikazanih dobivenih trajektorija gibanja panelaza djelomično oblačnog dana (Slika 5.2) može se primijetiti kako postoji relativno malarazlika između trajektorija dobivenih u determinističkom i stohastičkom okruženju.Takve razlike najviše se očituju za vrijeme povećane naoblake, odnosno kada je difuznakomponenta dozračenosti dominantnija od direktne komponente dozračenosti. Kada jedirektna komponenta Sunčeve dozračenosti dominantna, razlike između trajektorija izdeterminističkog i stohastičkog okruženja praktički su zanemarive.
07:00 08:00 09:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:000
10
20
30
40
50
60
70
80
90
Vrijeme − t [h]
Kut n
agnu
tost
i − β
[deg
]
Zenitni kut (Sunce) Traj. OPT−DET Traj. OPT−STO Traj. PT−DET Traj. PT−STO FIX−DET FIX−STO
07:00 08:00 09:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:0060
90
120
150
180
210
240
270
300
330
360
Vrijeme − t [h]
Kut o
kren
utos
ti −
γ [d
eg]
Azimutni kut (Sunce) Traj. OPT−DET Traj. OPT−STO Traj. PT−DET Traj. PT−STO FIX−DET FIX−STO
Slika 5.2: Trajektorije fotonaponskog panela (djelomično oblačno): OPT – optimalnatrajektorija, PT – trajektorija po točkama, FIX – optimalan kut nagiba fiksnog panela,DET – determinističko okruženje, STO – stohastičko okruženje
Za vrijeme potpuno oblačnog dana optimalna trajektorija gibanja fotonaponskogpanela nastoji što manje mijenjati trenutni položaj panela, što je posljedica znatnoveće zastupljenosti difuzne komponente dozračenosti u odnosu na direktnu komponentu.Na temelju prikazanih dobivenih trajektorija gibanja panela za potpuno oblačnog dana(Slika 5.3) može se primijetiti kako postoje znatno velike razlike između trajektorijadobivenih u determinističkom i stohastičkom okruženju. U determinističkom okruženjufotonaponski panel nastoji ostati u fiksiranom položaju tokom predikcijskog horizontanastojeći tako iskoristiti što veći dio difuzne komponente Sunčeve dozračenosti. U

Poglavlje 5. Sinteza prediktivnog upravljanja nagibom fotonaponskog panela 43
stohastičkom okruženju direktna komponenta dozračenosti počinje imati veći utjecaj uodnosu na determinističko okruženje, pa stoga fotonaponski panel u određenoj mjeripokušava pratiti trenutni položaj Sunca kako bi iskoristio barem dio dostupne direktnekomponente dozračenosti. Također se mogu uočiti i značajne razlike između optimalnetrajektorije i trajektorije po točkama, što je izravna posljedica neisplativosti u povećanjuproizvodnje električne energije prema potrošnji pogonskog sustava.
07:00 08:00 09:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:000
10
20
30
40
50
60
70
80
90
Vrijeme − t [h]
Kut n
agnu
tost
i − β
[deg
]
Zenitni kut (Sunce) Traj. OPT−DET Traj. OPT−STO Traj. PT−DET Traj. PT−STO FIX−DET FIX−STO
07:00 08:00 09:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:0060
90
120
150
180
210
240
270
300
330
360
Vrijeme − t [h]
Kut o
kren
utos
ti −
γ [d
eg]
Azimutni kut (Sunce) Traj. OPT−DET Traj. OPT−STO Traj. PT−DET Traj. PT−STO FIX−DET FIX−STO
Slika 5.3: Trajektorije fotonaponskog panela (potpuno oblačno): OPT – optimalnatrajektorija, PT – trajektorija po točkama, FIX – optimalan kut nagiba fiksnog panela,DET – determinističko okruženje, STO – stohastičko okruženje
Kod potpuno oblačnog dana pojavljuju se nagli skokovi u trajektoriji po točkama.Takvi skokovi nisu zastupljeni u optimalnim trajektorijama zbog toga što algoritamoptimizacije procijeni da se ne isplati pomicati fotonaponski panel u tolikoj mjeri da bise postiglo kratokrajno maksimiziranje upadne dozračenosti.
Sve dobivene trajektorije gibanja panela evaluirane su kroz simulaciju proizvodnjeelektrične energije fotonaponskog pretvornika tokom odabranog reprezentativnog danau stohastičkom okruženju. U Tablici 5.1 su prikazani podatci o proizvodnji električneenergije fotonaponskog pretvornika na kraju predikcijskog horizonta u stohastičkomokruženju, primjenom različitih trajektorija gibanja. Može se primijetiti kako je u svimslučajevima stohastičkog okruženja postignuto dodatno poboljšanje trajektorije gibanjaiz determinističkog okruženja.

Poglavlje 5. Sinteza prediktivnog upravljanja nagibom fotonaponskog panela 44
Tablica 5.1: Simulacija proizvodnje električne energije fotonaponskog pretvornika ustohastičkom okruženju primjenom različitih trajektorija gibanja.
OPT-DET OPT-STO PT-DET PT-STO FIX-DET FIX-STO
Vedro 789.9584 790.4521 788.8121 788.9285 664.4774 664.4905
Djel. oblačno 559.8783 561.8123 556.5398 559.4155 517.5417 517.8315
Potp. oblačno 226.1983 244.559 205.9999 239.3291 226.1983 239.5621
*OPT – optimalna trajektorija, PT – trajektorija po točkama, FIX – optimalan kut nagibafiksnog panela, DET – determinističko okruženje, STO – stohastičko okruženje.**Sve vrijednosti unutar tablice su u jedinici Wh.
Odabir parametara algoritma diferencijske evolucije radi se heurističkom metodom.U Tablici 5.2 su prikazani korišteni parametri algoritma diferencijske evolucije.
Tablica 5.2: Parametri algoritma diferencijske evolucije.Naziv varijable Vrijednost varijable Opis varijable
MAX_ITER 600 Maksimalni broj generacija
POP_SIZE 100 Broj jedinki u populaciji
CROSS_TYPE ’Arithmetic’ Način križanja
CROSS 0.4 Faktor križanja
MUTATION_TYPE ’Rand’ Način mutacije
SPREAD (F) 0.8 Faktor raspršenja
BOUNDS [0–90], [0–360] Granice područja pretraživanja
Pri sintezi modelskog prediktivnog upravljanja brzina optimizacije također je vrlobitan faktor, a ona ovisi o maksimalnom broju generacija te o veličini populacije. Uzodabrane parametre algoritma, ukupno vrijeme izvođenja optimizacije iznosi približno15 min, na sljedećoj četverojezgrenoj kofiguraciji računala:
Intel(R) Core(TM)2 Quad CPU,
Q8300 @ 2.50GHz,
2.50GHz, 3,43 GB of RAM.
Algoritam diferencijske evolucije u praktičnoj primjeni izveden je tako da podržavaMatlab R© Parallel Computing Toolbox, pa su se pri optimizaciji koristile sve četiriprocesorske jezgre istovremeno.

Poglavlje 6
Zaključak
U ovom radu je prikazan postupak razvoja modelskog prediktivnog sustava upravljanjanagibom fotonaponskog panela kojim se postiže veća efikasnost iskorištavanja energijeSunčeva zračenja. Sintezi modelskog prediktivnog regulatora prethodi identifikacijavjerodostojnog matematičkog modela izvora energije s uključenim opisom fizikalnihpojava na samom panelu. U tu svrhu napravljena je identifikacija modela direktne idifuzne komponente Sunčeve dozračenosti primjenom RBF neuronske mreže s tansigfunkcijom u izlaznom sloju. Bitno je istaknuti kako zbog izrazite nelinearnosti realnihmodela, identificirani modeli sadrže određenu nesigurnost.
Za postizanje željenog vladanja potrebno je na odgovarajući način definirati mjerukvalitete razvijenog algoritma upravljanja. Za agregate obnovljivih izvora električneenergije to može biti ukupno proizvedena električna energija duž predikcijskog horizonta.Pokazano je kako se razvijenim algoritmom upravljanja nagibom fotonaponskog panelamože dobiti i do 30% više električne energije u odnosu na slučaj kada je fotonaponskipanel fiksiran. Iako se opisani postupak sinteze prediktivnog upravljanja odnosi nakonkretni fotonaponski pretvornik, postupak se može primijeniti na bilo koji drugi tipfotonaponskog pretvornika uz poznavanje njegovih fizikalnih karakteristika.
Razvijeni sustav upravljanja nagibom fotonaponskog panela može se iskoristiti zasinkroniziranje rada fotonaponskih pretvornika s nekim drugim agregatima obnovljivihizvora električne energije u mikromreži. Upravo se od mikromreže očekuje povezivanjeraznih oblika obnovljivih izvora energije unutar jednog sustava s ciljem postizanjastabilnije proizvodnje i distribucije električne energije. Predikcija proizvodnje energijeiz agregata može poslužiti za adekvatnu reakciju sustava za pohranu, raspodjelu ipotrošnju električne energije u mikromreži.
45

Literatura
[1] Renewables 2010 Global Status Report. Technical report, REN21 Secretariat,Paris, 2010.
[2] A. D. Jones, C. P. Underwood. A thermal model for photovoltaic systems. Solarenergy, 70(4):349–359, 2001.
[3] C. Broggini. Nuclear Processes at Solar Energy. Physics in Collision, 21, 2003.
[4] E. A. Wan, R. van der Merwe. The Unscented Kalman Filter. In S. Haykin, editor,Kalman Filtering and Neural Networks. John Wiley and Sons, New York, 2001.
[5] E. L. Maxwell. MESTAT – The solar radiation model used in the production of theNational Solar Radiation Data Base (NSRDB). Solar Energy, 62:263–279, 1998.
[6] F. Erixon. The Europe 2020 strategy: Time for Europe to think again. EuropeanView, 9:29–37, 2010.
[7] F. Rosenblatt. Principles of neurodynamics: Perceptrons adn the theory of brainmechanisms. Spartan Books, Washington, 1962.
[8] G. Barker, P. Norton. Predicting long-term performance of photovoltaic arraysusing short-term test data and an annual simulation tool. In NREL Report, 2003.
[9] I. Petrović. Identifikacija nelinearnih dinamičkih procesa statičkim neuronskimmrežama. Fakultet Elektrotehnike i Računarstva, Zagreb, 1998. Doktorskadisertacija.
[10] J. Twidell, T. Weir. Renewable Energy Resources. Taylor & Francis, 2006.
46

Literatura 47
[11] K. V. Price, R. M. Storn, J. A. Lampinen. Differential Evolution: A ParticalApproach to Global Optimization. Springer Verlag, Berlin, 2005.
[12] Lj. Majdandžić. Solarni sustavi. Graphis, Zagreb, 2010.
[13] M. Clerc. The swarm and the queen: Towards a deterministic and adaptive particleswarm optimization. In Congress on Evolutionary Computation, Washington DC,pages 1951–1957, 1999.
[14] M. Minsky, S. Papert. Perceptrons: An introduction to computational geometry.MIT Press, Cambridge, 1969.
[15] M. Vašak, M. Gulin, J. Čeović, D. Nikolić, T. Pavlović, N. Perić. Meteorologicaland weather forecast data-based prediction of electrical power delivery of aphotovoltaic panel in a stochastic framework. In Proc. of. MIPRO, 2011.
[16] M. Čupić. Prirodom inspirirani optimizacijski algoritmi, Skripta, 2009.
[17] S. A. Barakat. Comparison of models for calculating solar radiation on tiltedsurfaces. In Proceedings of the Fourth International Symposium of the Use ofComputers for Environmental Engineering Related to Buildings, pages 317–322,1983.
[18] S. Seme, G. Štumberger, J. Voršić. Maximum Efficiency Trajectories of a Two-AxisSun Tracking System Determined Considering Tracking System Consumption.IEEE Power Electronics, 2011.
[19] S. Wilcox. National Solar Radiation Database 1991–2005 Update: User’s Manual.Technical report, National Renewable Energy Laboratory, April 2007.
[20] W. S. McCulloch, W. Pitts. A logical calculus of the ideas imanent in nervousactivity. Bull. Math. Biophys, 5:115–133, 1943.

Sažetak
Naslov: Dinamičko optimalno pozicioniranje aktivne plohe fotonaponskog panela
Autor: Marko Gulin
Energija dobivena iz obnovljivih izvora još uvijek je znatno skuplja u odnosu naenergiju dobivenu iz konvencionalnih izvora (fosilna goriva, nuklearna goriva itd.).Upravo ta činjenica predstavlja jednu od najvećih prepreka za masovno korištenjetakvih izvora energije. U novije se vrijeme sve više truda i napora ulaže u poboljšanjesustava za iskorištavanje obnovljivih izvora energije, s ciljem povećanja efikasnostipretvorbe energije, a s time i ekonomske isplativosti iskorištavanja obnovljivih izvora.Cilj je ovog rada razviti i provjeriti algoritam modelskog prediktivnog upravljanjanagibom fotonaponskog panela uzimanjem u obzir potrošnju energije pogonskog sustava,a sa svrhom da neto proizvedena električna energija bude čim većom. Postupak sintezemodelskog prediktivnog upravljanja sastoji se od dva temeljna koraka: (i) identifikacijamodela Sunčeve dozračenosti i razvoj modela fotonaponskog pretvornika te (ii) razvojalgoritma prediktivnog upravljanja nagibom fotonaponskog panela na temelju dobivenihmodela. Razvijen je algoritam prediktivnog upravljanja nagibom fotonaponskog panelau stohastičkom okruženju, pri čemu su u obzir uzete nesigurnosti ulaznih meteorološkihpodataka te razvijenog modela Sunčeve dozračenosti. Kvaliteta razvijenog algoritmapotvrđena je simulacijskim rezultatima.
Ključne riječi: Obnovljivi izvori energije, Umjetne neuronske mreže, Modelskoprediktivno upravljanje, Fotonaponski pretvornik, Identifikacija modela
48

Abstract
Title: Dynamical optimal positioning of the active surface of a photovoltaic panel
Author: Marko Gulin
Renewable energy is still considerably more expensive than the energy obtained fromthe conventional sources (fossil and nuclear fuels, etc.) and this is a major obstacle forits larger deployment. Recently a considerable amount of effort is being invested into theefficiency of renewable energy systems, in order to enlarge their economic gain. The aimof this work is to develop and verify model predictive control algorithm for photovoltaicenergy conversion system with the aim to increase its power production efficiencyconsidering the tracking energy system consumption. The model predictive controlsynthesis procedure comprises two basic steps: (i) identification of solar irradiancemodel and development of the photovoltaic energy conversion system model, and (ii)development of predictive control algorithm of the photovoltaic panel based on theobtained models. Predictive control algorithm is developed for solar energy conversionsystem in a stochastic framework, considering uncertainty of input meteorological dataand of the developed solar irradiance model. The quality of developed algorithm isverified through simulations.
Keywords: Renewable energy sources, Artificial neural networks, Model predictivecontrol, Photovoltaic converter, Model identification
49

Životopis
Rođen sam 12. lipnja 1988. godine u Šibeniku. Godine 2006. završio sam Prirodoslovno-matematičku gimnaziju u Šibeniku. Iste godine upisao sam se na studij na Fakultetuelektrotehnike i računarstva u Zagrebu. Na drugoj godini studija upisao sam smjerElektrotehnika i informacijska tehnologija, a na trećoj godini studija odabrao sammodul Automatika. Autor sam članka "Upravljanje kranom s ovješenim njihalom uzpretkompenzaciju sile trenja" i koautor članka "Meteorological and weather forecastdata-based prediction of electrical power delivery of a photovoltaic panel in a stochasticframework" prihvaćenih za konferenciju MIPRO 2011. Godine 2011. nagrađen samRektorovom nagradom za rad "Modelsko prediktivno upravljanje za povećanje efikanostiagregata obnovljivih izvora električne energije".
50