Embed Size (px)
Citation preview

BUDAPESTI MŰSZAKI EGYETEM
KÖZLEKEDÉSMÉRNÖKI KAR KÖZLEKEDÉSAUTOMATIKAI TANSZÉK
Digitális-Analóg (D/A) és Analóg-Digitális (A/D)
átalakítók
Segédlet az Irányítástechnika I. c. tantárgyhoz
Összeállította: DR.HRIVNÁK ISTVÁN
egyetemi adjunktus BME Közlekedésautomatikai Tanszék
Lektorálta: HALMAVÁNSZKI JÁNOS
MTA Izotóp Intézet

D/A és A/D átakítók 2
BME Közlekedésautomatikai Tanszék
Budapest, 1995. augusztus-szeptember

D/A és A/D átakítók 3
BME Közlekedésautomatikai Tanszék
Tartalomjegyzék
BEVEZETÉS _________________________________________6
I.1. Az analóg-digitális és a digitális analóg átalakítás ________7 I.2. D/A átalakítók alapelvei _____________________________7 I.3. CMOS technológiájú D/A átalakítók___________________9
I.3.1. Súlyozott áramok összegezése _______________________ 9 I.3.2. D/A átalakító morzekapcsolóval ____________________ 10 I.3.3. Ellenálláslétra ______________________________________ 11 I.3.4. Inverz létrakapcsolás _________________________________ 13
I.4. Bipoláris technológiájú D/A átalakítók ________________14 I.5. D/A átalakítók különleges célokra ____________________15 I.6. D/A átalakítók néhány alkalmazása __________________16
I.6.1. Függvénygenerátorként alkalmazott D/A átalakítók ________ 16
I.6.2. D/A átalakító alkalmazása tetszőlegesen programozható függvénygenerátorokban __________________________ 19
I.6.3. D/A átalakító alkalmazása programozható méréshatárú mérőerősítőkben_____________________________________ 20
I.7. D/A átalakítók pontossága __________________________21 I.7.1. Statikus jellemzők____________________________________ 21 I.7.2. Dinamikus jellemzôk _________________________________ 22
II.1. Az A/D átalakítás alapelvei _________________________27 II.2. Az A/D átalakítók jellemzõi ________________________29
II.2.1. Statikus hibák ______________________________________ 29 II.2.2. Dinamikus hibák____________________________________ 31
II.3. Az A/D átalakítók megvalósítása ____________________33 II.3.1. Közvetlen módszer___________________________________ 33 II.3.2. Kompenzációs elven működő átalakítók _________________ 37

D/A és A/D átakítók 4
BME Közlekedésautomatikai Tanszék
II.3.2.1. Követő (servo, vagy tracking) átalakító ___________ 38 II.3.2.2. Szukcesszív approximáció _____________________ 39

D/A és A/D átakítók 5
BME Közlekedésautomatikai Tanszék
II.3.3. Kaszkád elrendezés __________________________________ 42 II.3.4. Számlálót alkalmazó megoldások_______________________ 43
II.3.4.1 Fűrészfeszültség-eljárás (single slope)_____________ 44 II.3.4.2. Kettôs integrálási eljárás (dual slope) _____________ 44
II.3.5. Feszültség-frekvencia átalakítók (U-F konverterek): _______ 48 II.3.6. "Egy-bites", "delta" átalakítók ________________________ 50 II.3.7. A/D átalakítók realizálása mikroprocesszor felhasználásával 52
III. Az A/D és D/A átalakítók kiegészítõ eszközei ___________55
IV. A/D és D/A átalakítók felhasználása __________________55
Irodalomjegyzék______________________________________57
MÉRÉSI ÚTMUTATÓ ________________________________58

D/A és A/D átakítók 6
BME Közlekedésautomatikai Tanszék
BEVEZETÉS Az elektronika a tudomány és a technika szinte valamennyi területét meghódí-totta. Ismerete nemcsak a híradástechnikában, a számítástechnikában és az a-datfeldolgozásban nélkülözhetetlen, hanem az élet minden területén, ahol mérni, vezérelni és szabályozni kell. A berendezéseket csak akkor használhat-juk rendeltetésszerűen, ha működésükkel tisztában vagyunk. Ez a segédlet a Budapesti Műszaki Egyetem Közlekedésmérnöki Kar hallga-tói számára az Irányítástechnika I. című tantárgyhoz készült. Azokat az áram-köri kapcsolásokat és eszközöket mutatja be, amelyek az analóg és digitális technika közötti kapcsolatot teremtik meg, elemezve néhány konkrét alkalma-zási példát is. A témakör tárgyalása során feltételezzük, hogy az olvasó birto-kában van az alapvető elektrotechnikai, digitális technikai és számítástech-nikai ismereteknek. A segédlet elsősorban U.Tietze-Ch.Schenk: Analóg és digitális áramkörök c. könyv D/A és A/D átalakítók c. fejezete alapján készült, kiegészítve néhány, a könyv kiadása óta megjelent újabb áramkörrel, eszközzel.

D/A és A/D átakítók 7
BME Közlekedésautomatikai Tanszék
I.1. Az analóg-digitális és a digitális analóg átalakítás Ha folytonos analóg jelet digitálisan kell feldolgozni, akkor az analóg bemenô jelet az értékének megfelelô számmá (digitális értékké) kell alakítani. A fela-datot analóg-digitális átalakítóval (A/D átalakító, A/D konverter, ADC) lehet megoldani. A Z számnak arányosnak kell lennie a bemeneti feszültséggel:
Z UU
be
LSB
=
ahol ULSB a legkisebb súlyú bithez tartozó feszültségegység (Least Significant Bit, LSB), tehát a Z=1-hez tartozó feszültség. A számok visszaalakítása ezzel arányos feszültséggé vagy árammá digitál-analóg átalakítóval (D/A átalakító, D/A konverter, DAC) lehetséges. Kimeneti feszültségük arányos a bemenetre adott számmal:
Uki = ULSB Z.
I.2. D/A átalakítók alapelvei A D/A átalakítók egy számot (digitális értéket) vele arányos feszültséggé ala-kítanak. Három, elvileg eltérő megoldást különböztethető meg:
a) a párhuzamos (direkt) eljárás, b) a súlyozásos eljárás, c) a számláncot alkalmazó eljárás.
A három eljárás elvét az l. ábra foglalja össze. Az l.a. ábrán a párhuzamos eljárásnál a feszültségosztó minden lehetséges ki-meneti feszültséget elôállít. A kapcsolókat működtető n-bôl 1 dekódoló azt a kapcsolót zárja, amihez a megfelelô kimeneti feszültség tartozik. A súlyozásos eljárásnál az l.b. ábrán minden helyértékhez egy kapcsoló tarto-zik, és a súlyozó ellenállásokon át a szükséges kimeneti feszültség összegezô-déssel jön létre. Az l.c. ábrán változatosan ábrázolt számláncos eljárás csak egy kapcsolót igé-nyel. A kapcsolót periodikusan nyitjuk és zárjuk. A kitöltési tényezőt úgy kell

D/A és A/D átakítók 8
BME Közlekedésautomatikai Tanszék
beállítani, hogy a kimeneti feszültség számtani középértéke az elôírt értékre álljon be.
R
K 4
R
R
R
K 3
K 2
K 1
K 0
Uref
U ki
Uref
U ki
RK 2
2RK 1
4RK 0
Uref
U ki
R
K
Ca)
Párhuzamos eljárás
b)Súlyozásos közelítés
c)Számláncot alkalmazó eljárás
1. ábra
D/A átalakítók megoldási módszerei
+Ut
U ki
T2
T1
1
Uvez
U be
+Ut
U ki
Uvez
U be
T1 T2
+Ut
I
I
0D
Zár: U Uvez t= + Nyit: U Vvez = 0
UV ha U VV ha U Vki
vez
vez
=>
> <⎧⎨⎩
0 00 0
,,
2. ábra Soros CMOS kapcsoló
3. ábra Differenciálerősítő elvű kapcsoló

D/A és A/D átakítók 9
BME Közlekedésautomatikai Tanszék
Az összehasonlítva az 1. ábrán bemutatott három módszert látható, hogy a párhuzamos eljárás Zmax+1 számú kapcsolót igényel, a súlyozásos megoldás log2 (Zmax+1) számút, a számláncot alkalmazó átalakító pedig egyetlen kap-csolóval működik. A párhuzamos megoldást a nagyszámú kapcsoló miatt rit-kán használják. Ugyancsak ritka a számláncos eljárás alkalmazása is, amely-nek az a hátránya, hogy a feltétlenül szükséges alul áteresztô szűrô miatt a ki-meneti feszültség csak lassan változhat. A súlyozással működô D/A átalakító megoldások a leginkább elterjedtek a gyakorlati alkalmazásban. A továbbiakban ezen átalakítók többféle megvaló-sítási lehetôségérôl lesz szó. A kapcsolók áramköri megvalósítására alapvető-en két megoldás terjedt el. CMOS áramkörökben a 2. ábrán látható transz-missziós kaput (transmission gate) használnak. Bipoláris áramkörökben állan-dó áramokat állítnak elô, és a kapcsolást 3. ábrához hasonló elrendezésben va-lósítják meg.
I.3. CMOS technológiájú D/A átalakítók
I.3.1. Súlyozott áramok összegezése A 4. ábrán látható egyszerű áramkör bináris számok velük arányos feszültség-gé való átalakítását végzi.
U ki
2R
Z 3
4R 8R 16R
Z 2 Z 1 Z 0
Uref
I k
-+
R = RV
23
22
21
20
U U Zki ref= −
16; I
UR
Zk
ref=16
4. ábra
Egy D/A átalakítási elv Az ellenállásokat úgy határozzuk meg, hogy zárt kapcsolóállásnál olyan áram folyjon rajtuk keresztül, amely megfelel az adott helyérték súlyának. A kap-

D/A és A/D átakítók 10
BME Közlekedésautomatikai Tanszék
csolókat akkor zárjuk, ha az adott helyértéken logikai 1 van. A műveleti erôsí-tô RV ellenálláson létrejövô negatív visszacsatolása miatt az összegzô ponton mindig zérus feszültség marad. A részáramok tehát nem befolyásolják egy-mást. Ha a Z0-val vezérelt kapcsoló van zárva, akkor a kimeneti feszültség:
U U U RR
Uki LSB refv
ref= = − = −16
116
Ha minden kapcsoló zárva van, akkor
U U U RR
Uki ki refv
ref= = − = −max1516
1516
.
Általános esetben
U ZU U ZZki LSB ref= = −
+max 1.
I.3.2. D/A átalakító morzekapcsolóval Az elôzô D/A átalakító hátránya, hogy a kapcsolón nagy feszültségváltozások lépnek fel. A nyitott kapcsolón Uref feszültségkülönbség van, záráskor a fe-szültségkülönbség 0 lesz. Ezért minden átkapcsolás során át kell tölteni a kap-csoló parazitakapacitásait. Ez a hátrány kiküszöbölhető, ha az 5. ábra szerint morzekapcsolót használunk, amely az összegzô- és a földpont között kapcsol át. Ezáltal minden ellenálláson állandó marad az áram. Ebbôl más elôny is a-dódik: a referenciafeszültség-forrás terhelése állandó marad.
U ki
2R
Z 3
4R 8R 16R
Z 2 Z 1 Z 0
Uref
I k
-+
R = RVI'k

D/A és A/D átakítók 11
BME Közlekedésautomatikai Tanszék
IU
RZ
Zkref=
+max 1; I
UR
Z ZZk
ref' max
max
=−+ 1
U ZU U ZZki LSB ref= = −
+max 1
5. ábra
D/A átalakító morse kapcsolókkal
A referenciafeszültség-forrás belsô ellenállásának az elôzô kapcsolással szem-ben nem kell 0-nak lennie. Az ellenállás-hálózat bemeneti ellenállása, amely egyben a referenciaforrás terhelô-ellenállása is példánkban :
R R x R x R x R Rbe = =2 4 8 16 1516
.
I.3.3. Ellenálláslétra Az integrált D/A átalakítók gyártásánál általában a nagy érték tartományt átfogó, pontos ellenállások megvalósítása okozza a legnagyobb nehézségeket. Ezért a súlyozást a helyértékek szerint gyakran ellenállás-létrahálózattal való-sítják meg, amint az a 7. ábrán látható. Ebben az esetben a binárisan növekvő ellenállás sor helyett csak R és 2R értékű ellenállásokat kell a félvezető lapká-ra integrálni. Egy ilyen létrahálózat alapeleme a 6. ábra szerinti terhelt feszült-ségosztó, amely a következô tulajdonságú: ha Rt terhelô ellenállással terhel-jük, akkor Rbe bemeneti ellenállásának Rt -nek kell lennie.
U 1 R g
R t
U 2R = Rbe t R t
6. ábra Létrahálózat egy fokozatának felépítése

D/A és A/D átakítók 12
BME Közlekedésautomatikai Tanszék
U ki
2R
Z 3
2R 2R
Z 2 Z 1 Z 0
Uref
I k
-+
R = RVI'k
R =2Rg R =2Rt
RR RUref
Uref 2
Uref
4
Uref
8
U ZU U ZZki LSB ref= = −
+max 1
7. ábra D/A átalakító létrahálózattal
Az a α=U2/U1 feszültségátvitelnek ennél a terhelésnél egyenlônek kell lennie egy elôre megadott értékkel. Ezzel a két feltétellel megkapjuk a méretezési e-gyenleteket:
( )R
Rg1
21=
−αα
, és ( )R Rt g=−1 αα
.
A bináris kódnál α = 0,5. Ha feltételezzük, hogy Rg=2R, akkor
R1 = R és Rt= 2R, összhangban a 7. ábrával. A referenciafeszültség-forrást az
R R x R Rbe = =2 2 ellenállás terheli. Az összegzô erôsítô kimeneti feszültsége:
( )U R I U RR
Z Z Z Z U RR
Zki v k refv
refv= − = − + + + = −
168 4 2
163 2 1 0
A 6. ábrán látható D/A átalakító csak R értékű ellenállásokat tartalmaz. A 2R ellenállás két R értékű ellenállás sorba kapcsolásával helyettesítő. Ezért na-gyon jól gyártható az áramkör monolit technológiával is. A szükséges együtt-futási pontosság így egyszerűen biztosítható. Az ellenállások értéke érdekte-len, a névleges értéktől való eltérés nem okoz hibát, csupán a relatív hibát kell

D/A és A/D átakítók 13
BME Közlekedésautomatikai Tanszék
minél kisebbre csökkenteni. Még ±50 %-os eltérések is szokásosak. Termé-szetesen emiatt az Ik és Ik’ áramok is széles határok között változnak. A pon-tos kimeneti feszültség biztosítása céljából az RV visszacsatoló-ellenállást is ugyanazon a monolit chip-en kell megvalósítani. Így az előző egyenletben R abszolút értékével egyszerűsíthetünk; ez nem szól bele a kimeneti feszültség értékébe. Ezért az áram - feszültség átalakítására mindig belsô visszacsatoló-ellenállást kell használni és sohasem külsô ellenállást.
I.3.4. Inverz létrakapcsolás A létrahálózat a 8. ábrán feltüntetett módon felcserélt bemenettel és kimenet-tel is elônyösen működhet, mert az összegzéshez ilyenkor erôsítô sem szüksé-ges. Számításba kell venni a már említett hátrányokat, vagyis azt, hogy a kap-csolók nagy feszültségkülönbségű pontok közt kapcsolnak, és a referencia fe-szültségforrás terhelése is változik. A kimeneti feszültség számításához szükség van az Ui feszültségek és a hoz-zátartozó Ui’ csomóponti feszültségek közötti összefüggésekre. A szuperpozí-ció-tételt felhasználva minden bemeneti feszültségforrás feszültségét 0-nak vesszük, kivéve az Ui vizsgált feszültséget, majd összeadjuk az így kapott egyes kimeneti részfeszültségeket. Ha lezárjuk a hálózatot jobbról és balról R1 = Rt = 2R-rel, akkor feltételezés szerint minden csomóponttól jobbra és balra Rt = 2R eredô terhelés adódik. Ebbôl következnek az egyes feszültsé-gek:
U Ui i' =
13Δ .
A megfelelôen súlyozott részfeszültségek összegzésével a kimeneti feszültség:
U U U U U U Zki
ref= + + +⎛⎝⎜
⎞⎠⎟= ⋅
13 2 4 8
23 163
2 1 0
Mivel az áramkör belsô ellenállása független a beállított számtól és állandó értékű:
( )R R x R R Rb t g g= = − =1 α , ezért a súlyozási arány akkor is megmarad, ha az R1 terhelô-ellenállás nem a feltételezett R1 = 2R értékű.

D/A és A/D átakítók 14
BME Közlekedésautomatikai Tanszék
U ki2R
Z 3
2R 2R
Z 2 Z 1 Z 0
Uref
Iki
R =2RgR =2Rt
RR RU '0
U 0
U '1 U '2 U '3
U 1 U 2 U 3
R1
U U RR R
ZZ
U RR R
Zki ref ref=
+⋅
+=
+⋅1
1
1
11 16max
8. ábra
Inverz létrakapcsolás A 9. ábrán látható helyettesítô képbôl a következő egyenletbôl közvetlenül megkaphatjuk az üresjárási feszültséget és a rövidzárási áramot :
UU
Z U ZZki
refref0 16 1
= =+max
IU
RZ
RR
ZZki
ref refr= =
+16 1max
U kiU 0
IkiR = Rg
R = 2R1
9. ábra Az üresjárási kimeneti feszültség és a rövidzárási áram
számítására alkalmas helyettesítő kép
I.4. Bipoláris technológiájú D/A átalakítók A bipoláris technológiájú D/A átalakítók egyszerűen áramgenerátorokkal rea-lizálhatók, amelyek az eredô kimenô áram összetevôit alkotják. Az elvet a 10. ábrán láthatjuk.

D/A és A/D átakítók 15
BME Közlekedésautomatikai Tanszék
U ki
Z 3 Z 2 Z 1 Z 0
I k
8ILSB
-
4ILSB
-
2ILSB
-
ILSB
-
I'k R t
U R I Zki t LSB= − I I Zk LSB= ( )I I Z Zk LSB'
max= −
10. ábra Kapcsolt áramgenerátoros D/A átalakító
Az áramok helyértékük szerinti súlyozásúak. Aszerint, hogy az illetô bináris helyértéken 1 vagy 0 van; a helyértéknek megfelelô áram a kimenetre jut, vagy a föld felé folyik. Az Ik áram összegzô sínjének nem kell feltétlenül 0 fe-szültségen lenni, mert az áramgenerátor árama feszültség független. Termé-szetesen ez az áramgenerátor kivezérlési tartományán belül érvényes csak. Az áramok összegzésére tehát megfelel egy terhelô ellenállás is. Az állandó áramok egyszerű tranzisztoros áramgenerátorokkal állíthatók elô. Ha a bázisfeszültségek egyenlôek, és minden emitter ellenállást a negatív táp-feszültségre csatlakozik, akkor az ellenállásoknak a helyérték súlyával fordí-tott arányban kell változniuk. Ez a bipoláris technikában is toleranciaproblé-mákat okoz. Emiatt az áram elosztását itt is a korábbiakban megismert létra-hálózattal illetve inverz-létrahálózattal oldják meg.
I.5. D/A átalakítók különleges célokra Az előzőekben ismertetett D/A átalakítók különleges célokra is felhasználha-tók. Rendelkezésre állnak olyan D/A átalakítók, amelyek alkalmasak többek között:
- BCD (Binary Coded Decimal) számok analóg feszültséggé való áta-lakítására;
- előjeles számok feldolgozására; - szorzó típusú átalakításra; - osztó típusú átalakításra.
BCD számok analóg feszültséggé való átalakításakor minden decimális hely-értékhez (dekádhoz) egy négy helyértékű D/A átalakító egységet használunk,

D/A és A/D átakítók 16
BME Közlekedésautomatikai Tanszék
és ezeket egy olyan létrahálózattal kötjük össze, amely súlya egységről egy-ségre α=1/10 arányban csökken. Az előjeles számok feldolgozására alkalmas D/A átalakítók esetén a bemenô digitális információt - amely lehet pozitív és negatív szám - a megfelelő pozi-tív illetve negatív feszültséggé kell alakítani. A tetszôleges elôjelű bináris számok megszokott ábrázolási formája a kettes komplemens alak. Például 8 biten -128 és + 127 közötti tartományban írhatjuk fel a számokat ilyen formá-ban. A D/A átalakítóba való beírásnál 128 hozzáadásával eltoljuk a számsort 0 és 255 közé. A 128-nál nagyobb számokat pozitívként értékeljük, a 128-nál kisebbeket negatívként. A tartomány közepét, esetünkben 0-t, a 128 jelenti. Az elôjeles számoknak ezt a felírásmódját, amikor csak pozitív számokat használunk, ofszet bináris ábrázolásnak hívjuk (offset binary). 128 hozzáadása egészen egyszerűen elvégezhetô az elôjelbit negálásával. Ahhoz, hogy a kimeneti feszültséget elôjelhelyesen megkapjuk, ki kell vonjuk a 128 ULSB = Uref/2 ofszetet. Ez egy egyszerű kivonó áramkörrel megoldható. A D/A átalakítók kimeneti feszültsége arányos a bemenetre adott Z számmal és az Uref referenciafeszültséggel. Tehát a Z Uref szorzatot állítják elô. Azokat a D/A átalakítókat, amelyeknél a referenciafeszültség változtatása lehetséges, szorzó típusú D/A átalakítóknak nevezzük. A bipoláris technológiával készült átalakítók csak pozitív referenciafeszültséggel működhetnek, mert ellenkezô esetben az áramgenerátorok lezárnának. A CMOS technológiával készült D/A átalakítóknál mind pozitív, mind negatív referenciafeszültség megengedett. A D/A átalakítót úgy is működtethetjük, hogy az átalakítandó számmal osztás jöjjön létre (osztó típusú D/A). Ebben az esetben a műveleti erôsítô visszacsa-toló ágába helyezzük a szorzó D/A áramkört.
I.6. D/A átalakítók néhány alkalmazása
I.6.1. Függvénygenerátorként alkalmazott D/A átalakítók A szokásos D/A átalakítók kimeneti feszültsége arányos az átalakítóra adott Z számmal: Uki = aZ. Ha ehelyett egy tetszôleges Uki =f(Z) összefüggést kell re-alizálnunk, akkor elôször egy függvénygenerátorral ki kell alakítani az X=f(Z) függvényt, és az X értéket kell a D/A átalakítóra adni. Kisebb felbontási igénynél azonban erre van egy sokkal egyszerűbb módszer is. A Z bináris számmal egy analóg multiplexert vezérelünk. Ennek bemenete-ire adjuk azokat az analóg jeleket, amelyeket a különbözô bináris számokhoz

D/A és A/D átakítók 17
BME Közlekedésautomatikai Tanszék
kívánunk rendelni. Tehát minden analóg értékhez egy kapcsoló szükséges. Ez a megoldás csak kb. 16 lépésig célszerű. A 11. ábra egy ilyen megoldási lehe-tőséget ábrázol.
U ki
K0
-+
I k
R V
R0
K1
R1
K2
R2
K3
R3
R4R5R6R7
K4K5K6K7
- Uref
+ Uref
11. ábra D/A átalakító tetszőleges súlyokkal
Az K0. . . K7 kapcsolókból - a szokásos D/A átalakítókkal szemben - mindig csak egyet zárunk. Ezzel a kimeneti feszültség függvényértéke :
( )U ZU R
Rha Z i
U RR
ha Z jki
refv
i
refv
j
=+ = =
− = =
⎧
⎨⎪⎪
⎩⎪⎪
, ... ( , , , )
, ... ( , , , )
0 3 0 1 2 3
4 7 4 5 6 7
Ezt az elvet fôleg szinuszos feszültségek digitális elôállításánál használják (pl. modemekben). Frekvenciaosztók segítségével egyszerűen lehet olyan külön-bözô frekvenciájú jeleket elôállítani, amelyek közös idôalapból származnak. Analóg rendszerekben való felhasználás szempontjából azonban nagy hátrá-nyuk, hogy a kimenô jelek négyszögjelek. Ezekbôl úgy állíthatók elő szinusz-jelek, hogy az alap harmonikust egy alul áteresztô szűrôvel vagy sáváteresztô szűrôvel kiválasztjuk. Ezt a szűrôt azonban mindig a megfelelô frekvenciára kell hangolni.

D/A és A/D átakítók 18
BME Közlekedésautomatikai Tanszék
sin
-1,25
-1,00
-0,75
-0,50
-0,25
0,00
0,25
0,50
0,75
1,00
1,25
-2 -7/4 -6/4 -5/4 -1 -3/4 -2/4 -1/4 0 1/4 2/4 3/4 1 5/4 6/4 7/4 2
2φ/π
(φ)
-3-2
-1
-0
+0
+1+2
+3
12. ábra
Szinusz függvény közelítése 16 lépcsővel
240k
+ U ki
-
K4K5K6K7
91k56k51k
240k91k56k51k
K0K1K2K3
Analóg multiplexer(pl. CD 4051)
UDD
USS
UEE
+5V
-5V
=1
=1
[1]
[2]
[4]
[8]
Z 0
Z 1
Z 2
Z 3
0
1
2
G 07
+f be
R = 20kV
C
U 1
U R U f tkiV be= −Ω 1 2
16sin π
13. ábra
Folyamatos szinusz jel előállítása Ezzel szemben a fenti megvalósítású D/A átalakítóval elôállíthatók frekvencia függetlenül szinusz jelek. Digitális bemenô jelként azonos idôintervallumon-ként a 12. ábra szerinti egyenletesen növekvô és csökkenô digitális számsorra van szükség.

D/A és A/D átakítók 19
BME Közlekedésautomatikai Tanszék
Ha a számábrázolás abszolút érték és elôjel szerinti, akkor a kívánt számsor legegyszerűbben ciklikusan működô bináris számlálóval realizálható. A leg-nagyobb helyértékű bit az elôjel. A második legnagyobb helyértékű bittel kapcsolható át a kisebb helyértékű bitek számlálási iránya a megfelelô kime-netek kizáró VAGY-kapukkal történő negálásával. Ezek a bitek adják az abszolút értéket. A 13. ábrán feltüntetett megoldás 4 bites bináris számlálót használ. Hátránya ennek a kapcsolásnak, hogy a szinusz függvény pontos kö-zelítéséhez nagyon pontos ellenállásértékeket kell biztosítani, ezért e helyett a következőkben ismertetendő megoldást alkalmazzák.
I.6.2. D/A átalakító alkalmazása tetszőlegesen programozható függvénygenerátorokban
A tetszőlegesen programozható függvénygenerátorok (AFG = Arbitrary Func-tion Generator) az előre beprogramozott jelalakok (pl.: szinusz jel, négyszög jel, háromszög jel, stb.) választásán kívül lehetőséget biztosítanak tetszőleges jelalak beállítására is. Ezek a függvénygenerátorok a digitális oszcilloszkóp mintegy “kifordított” változatai. Amíg a digitális oszcilloszkóp a mérendő jelalakról meghatározott időközönként mintát vesz és eltárolja azt egy adat-halmazban, addig a programozható függvénygenerátorok egy ilyen adathal-mazból veszik meghatározott időközönként a jelalakot leíró értékeket, és egy D/A átalakító segítségével előállítják azt. A kívánt jel lehet egy digitális osz-cilloszkóppal mért és onnan a függvénygenerátorba áttöltött, jelalakot leíró a-dathalmaz, illetve bármilyen jelalak beprogramozható a függvénygenerátor-hoz rendelkezésre álló programozó eszközök segítségével. A 14. ábra egy ilyen tetszőlegesen programozható függvénygenerátor elvi felépítését mutatja be. Példánkban egy 8 bites D/A átalakító állítja elő kimeneti jelalakot. A D/A áta-lakító bemenetére (Data: D0-D7) egy 1024 byte kapacitású tároló juttatja a di-gitális (bináris) értékeket. Ebben a felépítésben 28=256 féle különböző érték-kel képezhető le egy jel periódus. A számláló a beállított frekvenciának meg-felelően lépteti a tároló címeit. A kimeneti jel frekvenciája jelen esetben f0/256. A K1, K2, K3, K4 kapcsolókkal a tárolóban tárolt 4 féle jelalak közül választhatunk például a 15. ábrán látható táblázatnak megfelelően: A programozhatóság feltétele, hogy a tároló, vagy annak megfelelő tartomá-nya kívülről átírható legyen (pl. E2PROM). A tetszőlegesen programozható függvénygenerátorok széles frekvenciatarto-mányt ölelnek át. Például Tektronix AFG 5101 típusú függvénygenerátora 12Hz - 12MHz tartományban működik, 12 bites felbontás mellett.

D/A és A/D átakítók 20
BME Közlekedésautomatikai Tanszék
D/A átalakító
TÁROLÓ
Számláló
D0
Frekvenciakijelzés
Adat - D7
A0
Cím - A7
K 1
K 2
K 3
K 4
kódoló
Cím
A8 - A9
Frekvenciaállítás
Kimenet
Jelalakválasztás
Cím
f0
14. ábra Programozható függvénygenerátor elvi felépítése
Kapcsoló Tároló címtartomány
a
Jelalak
K1 0 - 255 négyszög K2 256 - 511 háromszög K3 512 - 767 szinusz K4 768 - 1023 programozható
15. ábra
Programozható függvénygenerátor által tárolt jelalakok és választásuk
I.6.3. D/A átalakító alkalmazása programozható méréshatárú mérőerősítőkben
A programozható méréshatárú mérőerősítő (PGA=Programmable Gain Amp-lifier) erősítése digitálisan állítható be. Ezzel biztosított a számítógéppel vezé-relt automatikus méréshatár váltás funkciója. Az ilyen típusú mérőerősítőkben szorzó típusú D/A átalakítókat alkalmaznak. Egy programozható méréshatárú mérőerősítő elvi felépítését a következő 16. ábra mutatja be. Az erősítés érté-ke visszacsatolással állítható be, amely a D/A átalakítóval vezérelhető.

D/A és A/D átakítók 21
BME Közlekedésautomatikai Tanszék
U ki
R2
R 1 -+
D / A átalakítóSzorzó típusú
U be
16. ábra Programozható méréshatárú mérőerősítő elvi felépítése
I.7. D/A átalakítók pontossága
I.7.1. Statikus jellemzők A D/A átalakítók legfontosabb statikus jellemzői a következők:
- nullpont hiba, - maximális érték hibája, - linearitás hiba. - monotonitási hiba.
A D/A átalakító nullpont hibáját a nyitott kapcsolókon folyó záróáram, illetve legfőképpen a kimeneti erősítő ofszet feszültsége határozza meg. Napjainkban a CMOS típusú elektronikus kapcsolók visszárama néhány pA-ben mérhető. Ezek a kapcsolók közelítik meg legjobban az ideális kapcsolót (ellenállása a két állásban R Ron off= = ∞0Ω Ω, ), mivel ellenállásuk Ron=10...100 Ω és Roff=100...1000 MΩ. Például egy 8 bites D/A átalakító 8 CMOS kapcsolójá-nak együttes nyitott állapothoz tartozó árama legyen 8*2=16 pA. Ez a kime-neten - 10 kΩ-mos visszacsatoló ellenállást feltételezve a kimeneti erősítőn - Uki=10 kΩ*16 pA=160 nV. A műveleti erősítő ofszet feszültsége ennél nagy-ságrendekkel magasabb, néhány mV-ban mérhető. Ezek a feszültségek együt-tesen határozzák meg a D/A átalakító nullpont hibáját. A maximális érték hibáját egyrészt a kapcsolók soros (bekapcsolt) ellenállása, másrészt az Rv negatív visszacsatoló-ellenállás pontossága határozza meg. Hasonlóképpen hatással van a maximális érték hibájára a referencia feszültsé-gek pontossága is. A hibaforrások hatása beállítással nagymértékben csök-kenthető.

D/A és A/D átakítók 22
BME Közlekedésautomatikai Tanszék
Ezzel szemben a linearitás hiba nem egyenlíthetô ki. A linearitás hiba megad-ja, hogy egy lépés legkedvezôtlenebb esetben mennyivel nagyobb vagy ki-sebb, mint 1 LSB. A 17. ábrán a ±LSB/2 linearitás hibát ábrázoltuk. A kriti-kus eset a tartomány közepén jelentkezik. Ha a D/A átalakító bemenetére jutó szám bináris alakjában csak egy bit 1 értékű, akkor csak egyetlen kapcsolón át folyik áram. Ha a számot 1-gyel csökkentjük, akkor az összes kisebb súlynak megfelelô kapcsolón keresztül kell az eredôben egy ILSB-vel kisebb áramnak folynia. Ha a linearitás hiba nagyobb, mint 1 LSB, akkor a szintek monotonitása is megszűnik. A kimeneti feszültség a kritikus helyen csökkenhet akkor, ha a számot 1-gyel növeljük. Az ilyen hibát monotonitási hibának nevezzük. A 18. ábra erre mutat példát. A legtöbb D/A átalakítót úgy készítik, hogy a linearitás hibája ne lépje túl a ±LSB/2-t, mert egyébként a legkisebb bit kiértékelése ér-telmetlenné válna.
Z
U LSB
U
0
1
2
3
4
5
6
7
Z
U LSB
U
0
1
2
3 4
5
6
7
17. ábra
±1/2 LSB linearitás hibájú D/A átalakító
18. ábra ±3/2 LSB linearitás hibájú D/A
átalakító és az emiatt fellépô monotonitási hiba
I.7.2. Dinamikus jellemzôk A D/A átalakítók legfontosabb dinamikus jellemzői
- a beállási idő és - a kapcsolási tranziens, glitch.
A beállási idô megadja, hogy egy olyan átkapcsolás után, amikor a Z szám 0-ról Zmax-ra változik, mennyi ideig tart a kimeneti feszültség állandósult álla-

D/A és A/D átakítók 23
BME Közlekedésautomatikai Tanszék
pothoz tartozó értékének LSB/2 hibán belüli elérése. Ekkor biztosítható csak a D/A átalakító felbontásával megadott pontosságú analóg jel. Az LSB/2 hibae-lôírás következtében természetesen azonos idôállandójú, de nagyobb felbontá-sú D/A átalakító beállási ideje nagyobb. Sok D/A átalakítónál elôször egy áramot állítunk elô, amit szükség esetén egy következô műveleti erôsítôvel feszültséggé alakíthatunk át. Ekkor még a mű-veleti erôsítô beállási ideje is korlátozza a sebességet, mely beállási idô rend-szerint sokkal nagyobb, mint magáé a D/A átalakítóé. Rövidebb beállási idô elérésére olyan megoldást kell választani, amelyik műveleti erôsítô nélkül működik. Ezért CMOS típusoknál csak a 8. ábra szerinti inverz létrahálózatok jöhetnek számításba. A bipoláris technológiájú áramkörök általában ohmos terhelô ellenálláson is elôállíthatnak feszültséget. Nagy kimenô áramú típusok szükségesek ahhoz, hogy 50, ill. 75 Ω-os terhelô-ellenálláson is megfelelôen nagy kimeneti feszültség keletkezzen, így kaphatunk a MHz-es tartományban is működô (ún. video) átalakítókat. Kapcsolási tranziens jelenségként nagyon kellemetlen tüskék (glitch) jelent-keznek a kimeneten a bemenet változásakor. Oka kisebb részben a kapcsoló-jelbôl a kimenetre a kapcsolókapacitásokon keresztül átjutó összetevô, de fô-képpen a D/A átalakító kapcsolóinak nem egyidejű átkapcsolása. A kritikus hely ismét a tartomány közepe. Ha a bemenetre kapcsolt szám legnagyobb helyértékű bitje 1 (Most Significant Bit, MSB), akkor csak egyetlen kapcsolón át folyik áram. Ha a számot 1-gyel csökkentjük, akkor nyit az MSB kapcsoló, és minden más kapcsoló zár. Ha az MSB kapcsoló elôbb kinyit, mielôtt a töb-bi zárna, akkor egy rövid idôre 0 lesz a kimeneti feszültség. Ha az MSB kap-csoló késôbb nyit, miután a többi kapcsoló már lezárt, akkor egy rövid idôre a kimeneti feszültség maximális lesz. Tehát a fél kivezérlési tartománynak meg-felelô nagyságú zavarjelek keletkezhetnek. A 19. ábrán az említett jelensége-ket arra az esetre ábrázoltuk, mikor a kapcsolók zárási késleltetése kisebb, mint a nyitási.
Z
U LSB
U
0
1
2
3
4
5
6
7

D/A és A/D átakítók 24
BME Közlekedésautomatikai Tanszék
19. ábra
A lassan nyitó kapcsolók miatt fellépő pozitív glitch-ek Mivel ezek a glitch-ek rövid idejű impulzusok, tüskék, ezért alul áteresztô szűrővel csökkenthetôk, azonban így hatásuk idôtartama is megnô. A feszült-ség-idô terület, vagyis a tüske energiája változatlan marad. Teljesen úgy szün-tethető meg a jelenség, ha egy mintavevô-tartó áramkört a D/A után kapcso-lunk. A mintavevô-tartó áramkört úgy kell idôzíteni, hogy a tüskék alatt tartó üzem-módban működjön, így a tüskék hatásai nem jelentkeznek. Azokat a mintave-vô-tartó áramköröket, melyeket kifejezetten erre a célra terveztek, deglitcher áramköröknek nevezik. Egyszerűbb azonban kis tüskéjű D/A átalakító típusok alkalmazása. Ezek rendszerint belsô, élvezérelt tárat tartalmaznak a Z számra annak érdekében, hogy a vezérlés minden kapcsolóra egy idôben jusson. Ezenkívül a legkriti-kusabb, legnagyobb súlyú bitekre a párhuzamos átalakítási elvet alkalmazhat-juk, amely tüskehatásoktól eleve mentes.
D/A átalakítóKimenet
Port A Port Brégi érték régi érték
U régiki
1.
D/A átalakítóKimenet
Port A Port Búj érték régi érték
U ??ki
2.
régi érték új értéka.,b.,
D/A átalakítóKimenet
Port A Port Búj érték új érték
U újki
3.
D/A átalakítóKimenet
Port A Port B
U régiki
Megoldás:
LATCH LATCH STROBE
20. ábra Portról történő feltöltés esetén fellépő glitch és kiküszöbölése

D/A és A/D átakítók 25
BME Közlekedésautomatikai Tanszék
8 bitnél szélesebb D/A átalakítóknál glitch-ek keletkezhetnek amiatt is, a digi-tális (bináris) érték beírása 8 bites portokról keresztül történik. Az ilyen jelle-gű hiba nem a D/A hibája, de az előbbiekben tárgyalt glitch-eknél sokkal dur-vább hibát okozhat. Ezért ezt a tervezésben mindenképpen figyelembe kell venni. Feltételezve egy 12 bites D/A átalakítót, a beíráshoz két port szüksé-ges. Az első (A port) az alsó nyolc bitet, a második (B port) a felső 4 bitet ve-zérli. A D/A átalakító csak akkor működik helyesen, ha biztosított a két port teljesen szinkron működése. Ez úgy oldható meg, ha a D/A és a portok közé egy-egy közbenső tárolót (LATCH) építünk be, és mindkettőt egy közös óra-jelről (STROBE) vezéreljük. Az ilyen jellegű hibát és kiküszöbölését szemlél-teti a 20. ábra. A beírás aszinkronitása miatt fellépő glitch-ek több nagyságrenddel nagyob-bak lehetnek, mint a lassan nyitó kapcsolók miatt fellépők. A lassan nyitó kapcsoló miatt fellépő tüske néhány 100 ps, maximum ns nagyságú lehet. Ez-zel szemben az aszinkron port beírás miatt akár néhány μs hosszú idejű tüske is felléphet. A következő 21. ábrán látható két táblázat rövid áttekintést nyújt a leg-fontosabb D/A átalakítókról és fontosabb paramétereikről.
Típus Gyártó Felbontás Beállási idő Kimenet Technológia Belső
felépítés AD 7524 Analog
Dev. 8 bit 200 ns összegező CMOS A
AD 9768 Analog Dev.
8 bit 5 ns 20 mA* bipoláris B
AD 7541 Analog Dev.
12 bit 1 μs összegező CMOS A
AD 566A Analog Dev.
12 bit 250 ns 2 mA bipoláris B
DAC 800I Burr Brown 12 bit 300 ns 2 mA bipoláris B DAC 800V Burr Brown 12 bit 3 μs 10 V bipoláris B DAC 812 Burr Brown 12 bit 55 ns 10 mA hibrid C DAC 701 Burr Brown 16 bit 4 μs 10 V bipoláris B
MC 6890 Motorola 8 bit 200 ns 2 mA bipoláris B MC 10318 Motorola 8 bit 10 ns 50 mA bipoláris B MC 3412 Motorola 12 bit 200 ns 2 mA bipoláris B
DAC 830 National 8 bit 1 μs összegező CMOS A DAC 1210 National 12 bit 1 μs összegező CMOS A DAC 1265 National 12 bit 400 ns 2 mA bipoláris B DAC 888 PMI 8 bit 100 ns 2 mA bipoláris B DAC 208 PMI 8 bit+S 750 ns ±10 V bipoláris B DAC 312 PMI 12 bit 250 ns 4 mA bipoláris B
HS 3160 Hibrid Sys. 16 bit 2 μs összegező CMOS A DAC 9331 Hibrid Sys. 16 bit 2 μs összegező hibrid A DAC 9377 Hibrid Sys. 16 bit 20 μs ±10 V hibrid A
Am 6080 AMD 8 bit 160 ns 2 mA bipoláris B Am 6022 AMD 12 bit 75 ns 4 mA bipoláris B

D/A és A/D átakítók 26
BME Közlekedésautomatikai Tanszék
HI 5618 Harris 8 bit 45 ns 5 mA bipoláris C HI 5690V Harris 12 bit 1 μs 10 V bipoláris B DAC 608 Datel 8 bit 1 μs összegező CMOS A DAC 612 Datel 12 bit 1 μs összegező CMOS A
TDC 1016 TRW 10 bit 20 ns 12 mA* bipoláris C
* A tüskeenergia tipikusan 100 pVs 75 Ω-os terhelô-ellenállásos üzemnél S: elôjelbit A: ellenálláslétra hálózat B: kapcsolt áramgenerátor C: kapcsolt áramgenerátor inverz létrahálózattal
21. ábra Néhány gyakran használt D/A átalakító jellemző adatai

D/A és A/D átakítók 27
BME Közlekedésautomatikai Tanszék
II.1. Az A/D átalakítás alapelvei Az A/D átalakító (A/D konverter, ADC) feladata a bemeneti feszültséget ez-zel arányos számmá alakítani. Három, elvileg eltérô és egy kombinált megol-dást különböztetünk meg :
- a közvetlen (direkt) módszert (word at a time), - a kompenzációs módszert, amely a követő (servo, vagy tracking)
szukcesszív approximációs (fokozatos megközelítéses) módszereket (digit at a time) foglalja magánba,
- a számlálót alkalmazó módszert (level at time) és végül, - kaszkád módszer (a közvetlen és a szukcesszív approximációs mód-
szert kombináló). Az A/D átalakítók legújabb generációjához tartoznak a feszültség-frekvencia valamint frekvencia-feszültség (U-F, F-U konverterek), és a szigma-delta (Σ-Δ) átalakítók. A 22. ábrán az egyes hagyományos módszerek legfôbb tulajdonságait hasonlí-tottuk össze. Az U-F, F-U konverterek és a szigma-delta (Σ-Δ) átalakítók jel-lemzőit a későbbiekben részletezzük. Módszer Lépések
száma
Referencia-feszültségek
száma
Tulajdonságok
Közvetlen 1 n drága, gyors
Kompenzációs log2n log2n közepes sebességű
Számlálót alkalmazó n 1 olcsó, lassú
22. ábra
Néhány A/D átalakítási módszerek összehasonlítása A közvetlen eljárás során a bemeneti feszültséget összehasonlítjuk n számú referenciafeszültséggel, és megállapítjuk, hogy melyik kettô közé esik. Így a számot egy lépésben kapjuk meg. Az áramkör nagyon bonyolult, mert minden lehetséges számhoz egy komparátor szükséges. 0...100 méréstartományban 1-es felbontáshoz n =100 komparátor szükséges. A szukcesszív approximációnál az eredményt nem egyetlen lépésben kapjuk meg, hanem mindig csak a bináris szám egy helyértékéhez tartozó értéket ha-tározzuk meg. Az átalakítás a legnagyobb helyértéken kezdôdik, és azt vizs-gáljuk, hogy a kimeneti feszültség nagyobb vagy kisebb, mint a legnagyobb

D/A és A/D átakítók 28
BME Közlekedésautomatikai Tanszék
helyértékhez tartozó referenciafeszültség. A maradékot összehasonlítjuk a kö-vetkezô helyértékkel stb. Tehát az összehasonlítási lépések száma megegyezik a helyértékek számával, és ugyanennyi referenciafeszültség szükséges. A legegyszerűbbek a számlálót alkalmazó megoldások. Ennél azt számoljuk le, hányszor kell a legkisebb helyértékű referenciafeszültséget összeadni, hogy a bemeneti feszültséget megkapjuk. A lépések száma adja az eredményt. A legnagyobb n számhoz tehát n lépés szükséges, hogy az eredményt meg-kapjuk. A 23. ábrán a lehetséges pontosság és működési frekvencia tartományait ábrá-zoltuk.
23. ábra A/D átalakítók csoportosítása, felbontás és működési frekvencia szerint

D/A és A/D átakítók 29
BME Közlekedésautomatikai Tanszék
II.2. Az A/D átalakítók jellemzői
II.2.1. Statikus hibák Az A/D átalakítók legfontosabb statikus hibái a következők:
- kvantálási hiba, - jel-zaj viszony, - ofszet hiba, - erősítés hiba és a - linearitás hiba.
Analóg jelek véges számú bitet tartalmazó számmá való átalakításakor a kor-látozott felbontás következtében szisztematikus hiba keletkezik, amit kvantá-lási hibának nevezünk. Ennek értéke a 24. ábra alapján ±LSB/2, azaz akkora, mint a bemeneti feszültségváltozás fele, ami ahhoz szükséges, hogy a számot a legkisebb helyértéken megváltoztassuk. Ha a létrejövô számsorozatot D/A átalakítóval ismét feszültséggé alakítjuk vissza, a kvantálási hiba járulékos zajként jelentkezik. Ennek effektív értéke [1] szerint:
U UZeff
LSB=12
N bites átalakítónál teljes szinuszos kivezérlésnél a jelfeszültség effektív érté-ke:
U UjeffN
LSB= ⋅12
12
2
Ebbôl a jel-zaj viszony [1]:
SNR dBUU
N dB dBjeff
Zeff
= ⋅ = ⋅ +20 6 18lg , .
A rendszeres kvantálási hiba mellett kisebb vagy nagyobb kapcsolástechniká-ból adódó hibák is jelentkeznek. Ha a 24. ábrán megadott ideális átviteli ka-rakterisztikánál a lépcsôk középpontjait összekötjük, a szaggatott vonallal je-lölt egyenest kapjuk, amely az origón átmenô 1 meredekségű egyenes. Való-ságos A/D átalakítónál ez az egyenes nem megy át az origón (ofszet hiba), és

D/A és A/D átakítók 30
BME Közlekedésautomatikai Tanszék
meredeksége 1-tôl eltér (erôsítés hiba). Az erôsítéshiba a kivezérlési tartomá-nyon belül a kimenô jelnek a névleges értéktôl való eltérésében állandó relatív hibát okoz. Az ofszet hiba ezzel szemben állandó abszolút hibát hoz létre. Ez a két hiba rendszerint ofszet kiegyenlítéssel és a végkitérés beállításával kikü-szöbölhetô. Ekkor már csak a drift és a nemlinearitások miatti hibák maradnak meg. A szisztematikus kvantálási hibákon felül linearitási hiba akkor lép fel, ha a lépcsôk nem egyformák. A linearitási hiba meghatározására elôször kiegyen-lítjük az ofszetet és beállítjuk az erôsítést, és ezután meghatározzuk a bemene-ti feszültség maximális eltérését az ideális egyenestôl. Ebbôl levonva az ±ULSB/2 rendszeres kvantálási hibát, megkapjuk a teljes nemlinearitást. Ezt rendszerint az LSB egységhez viszonyítva adják meg. A 25. ábrán felrajzolt példánál ±ULSB/2 értékű. A linearitás hiba másik jellemzôje a differenciális nemlinearitás. Ez megadja, hogy mennyire térnek el az egyes lépcsôk abszolút értékben az ULSB névleges értékétôl. Ha ez a hiba ULSB-nél nagyobb, akkor egyes számok hiányozhatnak (missing codes). Még nagyobb eltérésnél a Z szám a bemeneti feszültség nö-velésekor csökkenhet (monotonitás hiba).
U LSB U be
U (Z)ki
U LSB
U be
U (Z) - ki U be
U LSB 1 2 +
U LSB 1 2
-
U LSB U be
U (Z)ki
U LSB
Teljes nemlinearitás(negatív)
Teljes nemlinearitás(pozitív)
U be
U (Z) - ki U be U LSB
U LSB
24. ábra. Kvantálási zaj keletkezése
25. ábra.
Linearitás hibás A/D átalakító

D/A és A/D átakítók 31
BME Közlekedésautomatikai Tanszék
Az Uki(Z) feszültség azon Z szám D/A átalakított értékének felel meg, ami az A/D átalakító kimenetén
lép fel
karakterisztikája
II.2.2. Dinamikus hibák Az A/D átalakítók dinamikus hibáit a következő paraméterekkel lehet megad-ni:
- a konverziós (átalakítási) idő és a mintavevő-tartó beállási idejének összege,
- pontosság, - apertúradzsitter (mintavételezési idő bizonytalansága), - különböző zajok.
A figyelembe veendő domináns hibákat az határozza meg, hogy mit, hogyan és milyen típusú A/D átalakító segítségével kell mérni. Ezek alapján a következő fontosabb csoportok különböztethetők meg:
- pillanatnyi érték meghatározása a mintavétel időpontjában (direkt módszer),
- pillanatnyi érték meghatározása a konverzió valamely pontján (kom-penzációs módszer),
- átlagérték mérése (dual slope, Δ-Σ, U-F, F-U). Az A/D átalakítók alkalmazásánál két területet különböztethető meg, a digitá-lis feszültségmérés és a jelfeldolgozás területe. Digitális feszültségmérô esetén abból indulunk ki, hogy a bemeneti feszültség az átalakítási idô alatt állandó. Ez a kikötés azért tehető, mert mérőműszerek használata esetén az emberi reakció idő nagyságrendekkel nagyobb, mint akár a leglassúbb A/D átalakítási folyamat. Ezzel szemben jelfeldolgozásnál az át-alakítás ideje alatt a bemeneti feszültség változhat. Digitális jelfeldolgozásnál egy jel pl. U(t) mintavételezett impulzus függvé-nyét kell meghatározni, majd a továbbiakban feldolgozni (pl. Fourier analízis, Z transzformáció, numerikus integrálás, numerikus deriválás, stb. módszerek-kel). Az y tengely mentén a pontosságot az A/D átalakító pontossága biztosít-ja. Hasonló relatív pontosságot kell biztosítani az x tengely mentén is (minta-vételezés gyakorisága és pontossága), ellenkező esetben az igényes nagy pon-tosságú A/D adatai jelfeldolgozási szempontból használhatatlanok lesznek.

D/A és A/D átakítók 32
BME Közlekedésautomatikai Tanszék
Digitális jelfeldolgozáshoz a változó feszültségbôl azonos idôközönként min-tát veszünk a mintavevô-tartó áramkör segítségével. Ezeket a mintákat digitalizálja az A/D átalakító. A keletkezô {Z} számsor csak akkor helyettesíti a bemenô jelet információveszteség nélkül, ha teljesül a mintavételi tétel fel-tétele: az fm mintavételi frekvenciának legalább az fmax legnagyobb jelfrek-vencia kétszeresének kell lennie. Ebbôl adódik az a követelmény, hogy az A/D átalakító konverziós (átalakítási) ideje és a mintavevô-tartó beállási idejének együtt kisebbnek kell lennie, mint 1 / (2fmax). A pontosság vizsgálatához figyelembe kell venni az A/D átalakító és a minta-vevô-tartó áramkör tulajdonságait is. Pl. nincs semmi értelme egy 12 bites A/D átalakítót mintavevô-tartó áramkörrel együtt működtetni, ha az a rendel-kezésre álló idôn belül nem áll be a végkitérés 2-12 = 1/4096 ≈ 0,025%-ának megfelelô pontossággal. További dinamikus hibát okoz az apertúradzsitter, vagyis a mintavételi idô-pont bizonytalansága. A mintavevô-tartó áramkör tA apertúra ideje miatt a mért mintavételi érték késleltetett lesz. Ha az apertúra idô állandó, akkor vala-mennyi mért érték ugyanannyival lesz késleltetett. Ezáltal az idôben egyenkö-zű mintavételezés feltétele továbbra is teljesülne. Ha azonban az apertúra idô a 26. ábrán láthatóhoz hasonlóan a dtA apertúradzsitter bizonytalanságú, akko-ra mérési hiba lép fel, mely éppen ezen idôkülönbség alatti dU feszültségkü-lönbséggel egyezik meg.
t
U be
T
U
dU
dtA
T: a mintavételezés periódusideje
26. ábra. Az apertúradzsitter hatása

D/A és A/D átakítók 33
BME Közlekedésautomatikai Tanszék
A maximális dU hiba számításához tételezzünk fel fmax maximálisan lehetsé-ges frekvenciás szinuszos bemenô jelet. A legnagyobb jelváltozási sebesség a nullátmeneteknél lép fel:
dUdt
Ut=
=0
$maxω
Ebbôl kiszámítható az amplitúdó hiba:
dU U dtA= $maxω .
Ahhoz, hogy az amplitúdó hiba kisebb legyen, mint az A/D átalakító ULSB kvantálási lépcsôje, teljesülnie kell az apertúradzsitterre az alábbi feltételnek:
dt UU
U
UA
LSB LSB< =$
maxmax max
ω ω12
.
Nagyfrekvencián ez a követelmény nehezen teljesül, amit a következô példa bizonyít: 8 bites átalakítónál ULSB/Umax = 1/255. 10 MHz maximális jelfrek-venciához az előző egyenlet szerint az apertúradzsitter ≈120 ps nagyságú le-het, amely nehezen biztosítható.
II.3. Az A/D átalakítók megvalósítása
II.3.1. Közvetlen módszer A közvetlen módszer bemutatására legjobb példa a párhuzamos átalakító, amelyet villámgyors konverternek (flash converter) is neveznek. Működése az amplitúdó szelektor elvén alapul: egy komparátor-sor figyeli, hogy a bemeneti feszültség melyik két (referenciából leosztott) lépcső között van. A komparátorok válaszjeléből egy kódoló állítja elő a bináris (vagy Gray) kódú kimeneti jelet. A rendszer előnye, (látszólagos egyszerűsége mel-lett), hogy az átalakítás sebességét csak a komparátorok és a logika késlelteté-si ideje korlátozza, ezért ily módon nagyon gyors működésű átalakítókat (MHz-es jelek átalakítására) lehet készíteni. Hátrány, hogy szinte annyi kom-parátor kell, amennyi a lépcsők száma (2n-1). Főleg video konverterként hasz-nálják a híradás- és méréstechnikában (digitális képfeldolgozás, oszcillosz-kóp).

D/A és A/D átakítók 34
BME Közlekedésautomatikai Tanszék
Közvetlen átalakító megvalósítását 3 bites számra a 27. ábra szemlélteti. 3 bit-tel 8 különbözô szám állítható elô a 0-val együtt, tehát 7 komparátor szüksé-ges. A szükséges egyenlô idôközű referenciafeszültség-sorozatot feszültség-osztó segítségével állítjuk elô. Ha a bemenetre pl. 5/2 ULSB és 7/2 ULSB közti bemeneti feszültséget adunk, akkor az 1...3 komparátor kimeneti állapota 1-es, a 4...7 komparátoré 0 szintű lesz. Olyan logikai áramkörre van szükség, amely a komparátorok ilyen álla-pota alapján a 3-as számértéket adja. A 28. ábrán táblázatban foglaltuk össze az összetartozó komparátor állapoto-kat és a bináris kódú eredményeket. A szükséges átalakítást egy olyan priori-tásdekódolóra (decimális bináris átalakító) bízhatjuk, amelynél az x7 a legma-gasabb és az x1 a legalacsonyabb prioritású bemenet.
U be
Uref
-+
1D
C1
Q
R
K 7 X 7132 U LSB
1D
C1
Q
R
K 6 X 6112 ULSB -
+
1D
C1
Q
R
K 5 X 592 ULSB -
+
1D
C1
Q
R
K 3 X 352 ULSB -
+
1D
C1
Q
R
K 2 X 232 ULSB -
+
1D
C1
QK 1 X 112 ULSB -
+
1D
C1
Q
R
K 4 X 472 ULSB -
+
R12
R12
Clock
PrioritásdekódolóZ 2
Z 1
Z 0

D/A és A/D átakítók 35
BME Közlekedésautomatikai Tanszék
Z U
UUU
Z UU
be
LSB
be
ref
be
ref
= = =7 max
27. ábra
Közvetlen A/D átalakító A prioritásdekódolót nem lehet közvetlenül a komparátorok kimenetére csat-lakoztatni, mert ha a bemeneti feszültség nem állandó, akkor idôlegesen teljesen hamis eredményt is kaphatunk. Példaként tekintsük a 3-ról 4-re való átváltást, amely bináris kódban 011-bôl 100-ba való átmenetet jelent. Ha a legnagyobb helyértékű helyen a változás kisebb késleltetése miatt gyorsabban megvalósul, mint a többin, akkor egy átmeneti idôre 111 jelenik meg, amely 7-nek felel meg. Ez a fél végkitérésnek megfelelô hibát jelent. Az analóg-digitális átalakítás eredményét rendszerint tárba írjuk át, tehát meghatározott valószínűséggel a hibás érték továbbítódik. Ha a mérés idôtartamára a bemeneti feszültséget állandó értéken tartjuk, pl. egy mintavevô - tartó áramkörrel, akkor a hibát kiküszöbölhetjük. Az eljárás azonban korlátozza az átalakítható bemeneti feszültség frekvenciáját, mert a mintavevô-tartó áramkör beállási ideje véges. Ezzel azonban még mindig nem biztosítottuk, hogy a komparátorok kimeneti állapota ne változzék, mert a gyors mintavevô-tartó áramkörök driftje jelentôs.
Bemeneti feszültség Komparátor állapotok Bináris szám Decimális érték
Ube/ULSB K7 K6 K5 K4 K3 K2 K1 Z2 Z1 Z0 Z
0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 1 1 2 0 0 0 0 0 1 1 0 1 0 2 3 0 0 0 0 1 1 1 0 1 1 3 4 0 0 0 1 1 1 1 1 0 0 4 5 0 0 1 1 1 1 1 1 0 1 5 6 0 1 1 1 1 1 1 1 1 0 6 7 1 1 1 1 1 1 1 1 1 1 7
28. ábra
A közvetlen A/D átalakító állapotai a bemeneti feszültség függvényében A probléma megoldására a komparátorok bemenetén való analóg tárolás he-lyett a komparátorok kimenetén digitális tárolást használhatunk. A 27. ábrán ezt a célt szolgálják a minden komparátor kimenetre kapcsolt élvezérelt D tárolók. Így biztosítható, hogy a prioritásdekódolóra egy teljes órajel-periódus alatt állandó bemeneti jel kerüljön.

D/A és A/D átakítók 36
BME Közlekedésautomatikai Tanszék
A következô trigger jel beérkezése elôtt a prioritásdekódoló kimenetén az ál-landósult állapotnak megfelelô adatok állnak rendelkezésre. A közvetlen áta-lakítási megoldás különleges elônye éppen a digitális mintavevô-tartó áramkör alkalmazásának lehetôsége. Ez a nagysebességű A/D átalakítás elôfeltétele. Analóg mintavevô-tartó áramkörök néhány MHz feletti frekvenciákra nagy hardver ráfordítással sem valósíthatók meg a szükséges pontossági igényeket kielégítő módon. A mintavételi idôpontot az órajel éle határozza meg. Ez a komparátorok be-menetén a komparátor késleltetéssel korábbi állapotnak felel meg. Ezért a kés-leltetési idôk különbsége határozza meg az apertúra bizonytalanságot. Hogy az elôzôekben említett kis értékeket elérhessük, lehetőleg kicsi kell, hogy legyen a késleltetés a komparátorok analóg bemeneteitôl a tárolókig. Ezért a legtöbb megoldásnál a tárolót a komparátor tartalmazza, és így lehetséges, hogy a tároló közvetlenül az analóg bemenetek után helyezkedjen el. Ilyen komparátor kialakítás eredményeképpen jutunk a 29. ábra szerinti bemenet el-rendezéshez.
I
T1 T2
+Ut
T3 T4
+Ut
KKomparátor Tároló
29. ábra Komparátor bemenet bistabil tárolóval
A K kapcsoló bal oldali állásában a T1 és T2 tranzisztor komparátorként mű-ködik. Ha átkapcsoljuk jobb oldali állásba a K kapcsolót, akkor a komparátor kikapcsol, és a T3, T4 tároló kezd működni. A tároló a komparátor kimeneti ál-lapotát tárolja. A helyes működéshez még az sem szükséges, hogy a kompará-tor teljesen átbillent állapotában legyen, mert már néhány mV feszültségkü-lönbség hatására is az ugyancsak differenciálerôsítô elrendezésű flip-flop egy-

D/A és A/D átakítók 37
BME Közlekedésautomatikai Tanszék
értelműen az egyik vagy másik stabil állapotába billen. Az apertúradzsitter ily módon 10 ps-ra is csökkenthetô.
Típus
Gyártó Felbontás
[bit]
Mintavételi frekvencia max.,[MHz]
Appertúra-dzsitter
[ps]
Logika
Teljesítmény-felvétel [mW]
TDC 1029 TRW 6 50* 30* ECL 1500* TDC 1048 TRW 8 20* 60* TTL 1000* TDC 1025 TRW 8 15* 40* ECL 3000* TDC 1019 TRW 9 100* 100* TTL 4000*
F 74F500 Fairchild 6 50 TTL 700 AM 6606 AMD 6 100* 25 ECL 1200 AD 9000 Analog Dev. 6 100 25 ECL 800 CX 20116 Sony 6 100* 30 ECL 1200
CA 3300 RCA 6 15* CMOS 100 TM 1070 Telmos 7 10 CMOS 100 CA 3308 RCA 8 15* CMOS 150 MP 7684 Micro Power 8 20 CMOS 250 EF 8308 Thomson 20 CMOS 400
* Garantált értékek 30. ábra.
Közvetlen eljárással működô A/D átalakítók jellemzôi A 30. ábrán közvetlen eljárással működô A/D átalakító áramkörök szerepel-nek. Látható, hogy az A/D átalakítók széles választéka áll rendelkezésre 6...9 bit felbontással és 15...100 MHz mintavételi frekvenciával. A CMOS techno-lógiájú típusok kis teljesítmény-felvételük miatt érdekesek, azonban más para-métereikben rosszabbak, mint a bipoláris típusok. Az A/D átalakítók linearitás hibája kis jelfrekvenciákra ±LSB/2, illetve ese-tenként ±LSB/4. Nagyobb frekvenciájú jeleknél nő a nemlinearitás mértéke. Így a legkisebb, sôt még a második legkisebb bit is használhatatlanná válhat. Ennek megfelelôen a kvantálási zaj 6, ill. 12 dB-lel nôhet [1].
II.3.2. Kompenzációs elven működő átalakítók Az alapelvet a 31. ábra mutatja: a vezérlő logika addig változtatja kimeneti je-lét, (és a teljes átalakító kimeneti jelét), ameddig az általa vezérelt digitál-ana-lóg konverter kimeneti jele (UDAC) egyenlő nem lesz az Ux bemeneti, analóg jellel. Ha eltérés van, akkor a komparátor jelzést ad a vezérlő logikának mind-addig, amíg a hurokban az egyensúly helyre nem áll.

D/A és A/D átakítók 38
BME Közlekedésautomatikai Tanszék
Ube -+
Komparátor
VEZÉRLÕ
LOGIKA
DAC
D kimenet
Uref
31. ábra Kompenzációs elven működő A/D átalakító felépítése
A vezérlő logika működésétől függően alapvetően kétféle rendszer szokásos:
- a követő (servo, vagy tracking) átalakító, és - a fokozatosan közelítő (Successive Approximation) eljárás.
II.3.2.1. Követő (servo, vagy tracking) átalakító A vezérlő logika legfontosabb része egy oda-vissza számláló (reverzibilis számlánc), amely egy órajel ütemében számol a komparátor kimenete által meghatározott irányban. A számláló kimenete a Z digitális jel, amelyet egy D/A átalakító analóg jellé alakít vissza (U(Z)). A komparátor összehasonlítja az Ube bemeneti feszültséget az U(Z) kompenzáló feszültséggel. Ha a bemene-ti jel nagyobb mint a kompenzáló U(Z), akkor a komparátor úgy vezérli a számlálót, hogy előre számláljon, növekedjen Z és az U(Z) egészen a közelítő (1 LSB) egyenlőség beállásáig. Kisebb bemeneti jel esetében fordított a folya-mat, U(Z) csökken. Végül is - ha Ube nem változik gyorsan - a digitális kime-neti jel (számlánc) követi a bemeneti jelet (32. ábra). Ezért is nevezik követô A/D átalakítónak (Servo vagy Tracking ADC). Ennek a megoldásnak ez tulaj-donság kétségtelen előnye. Hátránya, hogy gyors változáskor (szélső, esetben 0V-ról Ubemax-ra történő ugráskor) U(Z), ill. a kimenet jele hosszú idő múlva (2n órajel periódus alatt ) éri el a bemeneti jelet.

D/A és A/D átakítók 39
BME Közlekedésautomatikai Tanszék
U be
Uref
-+
K
D / A
átalakító
Reverzibilisszámlánc
U/D
Z
Z
ZU(Z)
Clock
( )Z Z UU
be
ref
= +max 1
32. ábra
Kompenzációs, követő A/D átalakító A 32. ábrán látható kapcsolás szépséghibája, hogy soha nem áll meg, hanem a bemeneti feszültség körül 1 LSB-vel váltakoztatja értékét, mert az órajel soha-sem áll le. Ez úgy küszöbölhető ki, hogy a közönséges komparátor helyett un. ablak komparátort használhatunk, amely letiltja az órajelet, amennyiben az Ube bemeneti feszültséget ±ULSB/2-re megközelíti az U(Z) kompenzáló fe-szültség. A vezérlôlogika elmaradásáért - a szukcesszív eljáráshoz képest - az átalakítási sebesség lényeges csökkenésével fizetünk, mert most a kompenzá-ló feszültség csak ULSB lépésenként változik. Ha a bemeneti feszültség csak lassan változik, akkor mégis gyors lesz a konverzió, mert a követés folyama-tosan valósul meg, és nem kezdôdik mindig elölrôl, mint a következőkben is-mertetendő szukcesszív approximációs eljárásnál. Ezen a követô elven műkö-dik a Datel cég ADC 856 típusú monolit integrált áramköre. Felbontása 10 bit, és konverziós ideje 1 μs / 1 LSB.
II.3.2.2. Szukcesszív approximáció A 33. ábra olyan A/D átalakítási elvet szemléltet, amely a fokozatos közelítés (szukcesszív approximáció) elve alapján működik.

D/A és A/D átakítók 40
BME Közlekedésautomatikai Tanszék
U be
Uref
-+
K
Mintavevõ-tartó áramkör
D / A
átalakító
Szukcesszív
regiszterapproximációs
D
Z
Z
ZU(Z)
Clock
33. ábra Szukcesszív approximációs A/D átalakító
A komparátor összehasonlítja a tárolt mérési részeredményt a D/A átalakító kimeneti feszültségével. A mérés kezdetén a Z számot a kapcsolás nullázza. Ezután a legnagyobb súlyú bit (MSB) 1 értékű lesz, és a kapcsolás megvizs-gálja, hogy a bemeneti feszültség nagyobb-e, mint U(Z). Ha igen, akkor az 1-es érték megmarad, egyébként visszaáll 0-ra. Így az MSB "mérlegelése" már létrejött. Ez az összehasonlítás alapján való mérlegelés sorban valamennyi bit-re megvalósul, míg végül a legkisebb súlyú bit (LSB) értéke is előáll. Ekkor a szukcesszív approximációs regiszterben egy olyan szám képződik, amely a D/A átalakítás után akkora feszültséget hoz létre, amely ULSB felbontási lépé-sen belül Ube értékével egyezik meg. Így jó közelítéssel :
( )U Z U ZZ
Uref be=+
=max 1
,
és
( )Z Z UU
be
ref
= +max 1 .
Ha a bemeneti feszültség az átalakítási idô alatt megváltozik, akkor mintave-vô-tartó áramkör szükséges a függvény mintaértékének közbülsô tárolására, hogy minden helyérték képzésekor ugyanazt az Ube(tj) bemeneti feszültséget vegye figyelembe. Mintavevô-tartó áramkör nélkül akkora hiba keletkezhet, amekkora a bemeneti feszültség változása a konverziós idô alatt. Az elsô három összehasonlító lépés folyamatábráját a 34. ábra szemlélteti. Látható, hogy minden lépésben azt kell eldönteni, hogy a vizsgált bit értéke 1 vagy 0. Az elôzôleg már meghatározott bitek változatlanok maradnak.

D/A és A/D átakítók 41
BME Közlekedésautomatikai Tanszék
Start
Z>100
Z>110 Z>010
Z>011Z>101Z>110 Z>001
i
i
i i
i
i i
n
n
n n
n
n n
100 000
100110
111 110 101 100 011 010 001 000
010 000
1. lépés
2. lépés
3. lépés
34. ábra A szukcesszív approximáció folyamatábrája
Az átalakítás folyamatát a SAR (Successive Approximation Register) vezérli.
Típus
Gyártó Felbontás
[bit]
Konver-ziós idő
[μs]
Segédfe-szültségek
[V]
Teljesítmény-felvétel [mW]
Techno-
lógia Am 6108 AMD 8 1 -5 600 TTL Am 6112 AMD 12 3 -5 500 TTL
AD 7574 Analog Dev.
8 15 - 30 CMOS
AD 578 Analog Dev.
12 3 ±15 775 hibrid
ADC 84 Burr-Brown 12 10 ±15 1500 hibrid ADC 803 Burr-Brown 12 1,5 ±15 2000 hibrid ADC 76 Burr-Brown 16 15 ±15 1500 hibrid
ADC 847 Datel 8 9 - 125 TTL ADC 5210 Datel 12 12 ±15 700 hibrid ADC 810 Datel 12 2 ±15 2000 hibrid
TDC 1001 TRW 8 0,4 -5 400 TTL F 74F505 Fairchild 8 0,2 - 100 TTL HS 9516 Hybrid Sys. 16 100 ±15 900 hibrid
SDM 862 Burr-Brown 8 20 ±15 1000 CMOS SDM 863 Burr-Brown 12 20 ±15 1000 CMOS SDM 872 Burr-Brown 8 12 ±15 1000 CMOS SDM 873 Burr-Brown 12 12 ±15 1000 CMOS
ADC 574A Burr-Brown 8/12 13/20 ±15 / ±12 1000 CMOS
35. ábra
Szukcesszív approximációs A/D átalakítók jellemző adatai Tápfeszültség igény: +5 V és a táblázatban szereplő segédfeszültségek
Szukcesszív approximációs A/D átalakítók integrált kivitelben nagy válasz-tékban állnak rendelkezésre. Közülük néhányat jellemző paramétereikkel a 35. ábrán mutatunk be.

D/A és A/D átakítók 42
BME Közlekedésautomatikai Tanszék
A 35. ábrán bemutatott táblázatból ki kell emelni az utolsóként szereplő ADC 574A típusú szukcesszív approximációs átalakítót, amely a legnagyobb számban gyártott 12 bites A/D átalakító. A PC-khez gyártott adatgyűjtő kár-tyák nagy részénél ezt az áramkört használják fel olyan kedvező tulajdonságai miatt, mint pl.:
- a felbontás 8 vagy 12 bitre kívülről programozható, - 8, 12, 16 bites mikroprocesszor busz interfész, - nincs kódvesztés 0°C - +75°C hőmérséklet tartományban (-55°C -
+125°C, katonai kivitel esetén).
II.3.3. Kaszkád elrendezés A közvetlen átalakítók hátránya, hogy a komparátorok száma a szóhosszal ex-ponenciálisan nô. Egy 10 bites átalakítóhoz 1023 komparátor szükséges. Ez az igény jelentôsen csökkenthető, ha az átalakítás sebességére engedményt te-szünk. Ennek érdekében kombinálhatjuk a közvetlen és valamely kompenzá-ciós, pl. a szukcesszív approximációs módszert. 10 bites átalakítót úgy készíthetünk ezzel a bôvített közvetlen eljárással, hogy az elsô lépésben közvetlen módon meghatározzuk a felsô 5 bitet, amint ez a 36. ábrán látható. Az eredmény a bemeneti feszültség durván kvantált értéke. D/A átalakítóval képezzük a hozzátartozó analóg feszültséget, és ezt kivonjuk a bemeneti feszültségbôl. A maradékot egy 5 bites A/D átalakítóval digitali-záljuk. Ha a durva érték és a bemeneti feszültség közötti különbséget 32-sze-resére erôsítjük, akkor mindkét A/D átalakító ugyanabban a bemeneti feszült-ségtartományban működik. A két átalakító között csak a pontossági követel-ményben van eltérés. Az elsô 5 bites A/D átalakítónak 10 bitesnek megfelelô pontosságúnak kell lennie, mert különben a különbségképzés után maradó rész információtartalom nélkülivé válna.
U be
Z9
Mintavevõ-tartó áramkör
5 bitesközvetlen
A / D
5 bitesD / A + x 32 5 bites
A / D
+
-
Z8 Z7 Z6 Z5 Z4 Z3 Z2 Z1 Z0
Uref
közvetlen
Z Z UU
UU
be
ref
be
ref
= =max 1023

D/A és A/D átakítók 43
BME Közlekedésautomatikai Tanszék
36. ábra. Kaszkád átalakítók elve
Nagy jelfrekvencia esetén a második A/D átalakítót túlvezérli a különbségi jel, és a kimenô jelben durva hibák (pl. Missing Codes; egyes kódszavak hiá-nya) jelentkeznek. A hiba megszüntethető, ha a második A/D átalakító beme-neti feszültségtartományát megkétszerezzük, és ezáltal felbontását 1 bittel megnöveljük. A durva és a pontos értéket természetesen mindig ugyanazzal az Ube(tj) beme-neti feszültséggel képezzük. Az elsô fokozaton történô véges idejű áthaladás miatt azonban idôbeli késés keletkezik. Ezért a bemeneti feszültséget ennél az eljárásnál analóg mintavevô-tartó áramkörrel állandó értéken kell tartani, amíg az egész szám képzése be nem fejezôdött. Ez a fô hátránya a tisztán közvetlen eljárással szemben. A kaszkád típusú A/D átalakítók az előbb említett hátrány miatt ritkán használatosak. Néhány kaszkád A/D átalakító típusokról a következő 37. ábra ad áttekintést.
Típus
Gyártó Felbontás
[bit]
Mintavételi frekvencia max.,[MHz]
Technológia
Teljesítmény-felvétel
[W] ADC 0820 National 8 1 CMOS 0,035 MP 7683 Micro Power 8 10 CMOS 0,075 CX 20200 Sony 10 20 ECL 0,360 CX 20204 Sony 10 50 ECL 1,100 CAV 1040* Analog Dev. 12 40 Modul 21 CAV 1210* Analog Dev. 12 10 Modul 18
* Mintavevő-tartó áramkört is tartalmaz
37. ábra Néhány kaszkád eljárással működő A/D átalakítók jellemzôje
II.3.4. Számlálót alkalmazó megoldások A számlálós eljárással működô A/D átalakítók olcsó áramkörök. Konverziós idejük sokkal nagyobb, mint más átalakítóké, rendszerint 1ms és 1s közé esik. Ez azonban elegendő lassan változó jeleknél, melyek pl. hômérsékletmérésnél lépnek fel. Digitális voltmérôk számára is elég ez a sebesség, mert úgysem ol-vasható le gyorsabban az eredmény. Több megoldás is létezik a számlálási elv megvalósítására, amelyeket a továbbiakban ismertetünk. Közülük legfonto-sabb a "dual slope" eljárás, mert ezzel olcsón nagy pontosság érhető el.

D/A és A/D átakítók 44
BME Közlekedésautomatikai Tanszék
II.3.4.1 Fűrészfeszültség-eljárás (single slope) Ezt az eljárást csak a teljesség kedvéért említjük meg, mivel ezt a típust már kb. a 70-es évek vége óta nem gyártják. A fűrészjeles A/D átalakító D/A átalakítót nem tartalmazott. Azon az elven működött, hogy a bemeneti feszültséget elôször értékével arányosan idôvé alakította át. Felépítésénél fogva azonban nem volt valódi aránymérő. A mé-rés idôtartama nem függött a vizsgált feszültség elôjelétôl, csak az abszolút értékétôl. Az átalakítóval elérhető legnagyobb pontosság 0,1% volt.
II.3.4.2. Kettôs integrálási eljárás (dual slope) A single slope eljárást a kettős integrálási eljárás (dual slope) váltotta fel. Legfontosabb jellemzői a következők:
- valódi aránymérő (Ube/Uref), - a konverziós idő hossza függ a bemenő jel nagyságától, - a dual slope átalakító csak a konverziós idő egy részében foglalkozik
a bemenő jellel. A 38. ábra látható dual slope mérési eljárásnál nemcsak a referenciafeszültsé-get, hanem a bemeneti feszültséget is integráljuk. Ez a kapcsolás már valódi aránymérőként működik. Nyugalmi állapotban a K1 és K2 kapcsoló nyitott, a K3 zárva van. Az integrátor kimeneti feszültsége ezért 0.
Uref
-+
KUbe
Számlánc
Kapcsoló-
logika
f=1/T Z
Clock
-+
vezérlõ
A
&
U 1
K 1
K 2
K 3
R
C
38. ábra Dual slope eljárással működő A/D átalakító

D/A és A/D átakítók 45
BME Közlekedésautomatikai Tanszék
A mérés kezdetén a számláncot töröljük, a K3 kapcsolót nyitjuk, és K1-et zár-juk. Ezáltal a bemeneti feszültséget integráljuk. Ha a mérendô jel pozitív, az integrátor kimenete negatív lesz, és a komparátor engedélyezi az órajel gene-rátort. Ezen mérési idôtartam akkor ér véget, amikor a számláló Zmax+ 1 periódus után túlcsordul, és ezáltal a számláló által mutatott érték ismét 0 lesz. Ezen integrálási szakasz végén az integrátor kimeneti feszültsége :
( ) ( )U t U dt U T Z Tbebe
t
1 10
1 11
= − = − +∫τ τ max .
Ezt követôen a referenciafeszültség integrálására kapcsol át az áramkör. A re-ferenciafeszültség elôjelét ehhez a bemeneti feszültségéhez képest ellentétesre állítjuk. Így a kimeneti feszültség abszolút értéke csökkenni kezd, amint ez a 39. ábrán látható.
UI
t
integrálásaUref
t 2
t 1 t 2
integrálásaUbe
39. ábra Az integrátor bemeneti feszültségének időábrája különböző bemeneti
feszültségeknél A komparátor és az eredményszámláló segítségével határozható meg, hogy milyen hosszú az az idôtartam, amíg ismét elérünk a nullátmenethez :
( )t ZTU
U tref
2 1 1= =τ .
Az eredmény a előző összefüggés figyelembevételével:
( )Z UU
Zbe
ref
= +max 1 .

D/A és A/D átakítók 46
BME Közlekedésautomatikai Tanszék
Az egyenlet szerint a kettôs integrálási eljárás szembeötlô jellegzetessége, hogy sem a τ = RC1 idôállandó, sem az 1/T órafrekvencia nem szerepel a vég-eredményben. Csak az szükséges, hogy az órajel frekvenciája a t1 + t2 idôtar-tam alatt állandó legyen. A szükséges rövid idejű stabilitás azonban viszony-lag egyszerű órajel-generátorral is biztosítható. Emiatt ezzel az eljárással 0,01% pontosság is elérhető. A levezetés során láttuk, hogy a feszültségnek nem pillanatnyi értéke, hanem a tl mérési idô alatti átlaga szerepel a végeredményben. Ezért váltakozó fe-szültségre az elnyomás annál nagyobb, minél nagyobb a frekvenciája. Azokat a váltakozó feszültségeket, amelyeknek frekvenciája 1/tl-nek egész számú többszörösei, a kapcsolás teljesen elnyomja. Ezért az órajel frekvenciáját úgy kell beállítani, hogy tl a hálózati váltakozó feszültség periódusidejével vagy annak egész számú többszörösével legyen egyenlô. Ekkor az un. búgófeszült-ség hatása teljesen kiküszöbölhető. Mivel a kettôs integrálási eljárás olcsó és pontos, zavarelnyomása is nagy, ezért fôleg digitális feszültségmérôkben használják, ahol a viszonylag hosszú konverziós idô nem zavaró. A 38. ábrán látható számlálónak nem kell feltétlenül bináris számlálónak len-nie, a működés elve változatlan, ha pl. BCD számlálót alkalmazunk. Ez a lehetôség ki is használható a digitális voltmérôkben, mert ebben az esetben nem kell bináris-decimális átalakítót használni. Automatikus nullpont-kiegyenlítés kettôs integrálási (dual slope) eljáráshoz A kettôs integrálási eljárásnál láttuk, hogy a τ=RC1 idôállandó és az f=1/T ó-rajel-frekvencia az eredményben nem szerepel. A pontosságot tehát lényegé-ben a referenciafeszültség toleranciája, az integrátor és a komparátor nullpont-hibája határozza meg. A nullponthiba automatikus nullpont-kiegyenlítéssel megszüntethető. E célból helyettesítjük a 38. ábrán szereplô K3 rövidzár kap-csolót egy a 40. ábra szerinti szabályozó áramkörrel, amellyel az integrátor megfelelô kezdeti feltételét állíthatjuk elô. A kapcsolást egy IC-be integrálják.

D/A és A/D átakítók 47
BME Közlekedésautomatikai Tanszék
Ube
Integrátor
logikára
-+
Uref
VezérlõU 1
K 1
K 3
R
K 4
K 2
CNull
-+
-+
R 1
R 2
Erõsítõ Komparátor
U k
C1
I B
40. ábra
Dual slope eljárás automatikus nullpont-kiegyenlítése Nyugalmi állapotban a K3 kapcsoló zárva van. Ekkor az integrátor a kompará-tor elôerôsítôjével egy feszültségkövetôt alkot, Uk kimeneti feszültsége a CNull jelű kondenzátort feltölti. A nullpont-kiegyenlítéshez az integrátor bemenetét eközben a K4 kapcsoló zárásával 0 feszültségre (földpontra) kapcsoljuk. Így az Uk = U0l - IBR korrekciós érték áll be, ahol U0l az integrátor ofszet feszült-sége, és IB a bemeneti munkaponti árama. Állandósult állapotban a kompenzá-lás miatt a C1-n átfolyó áram 0 lesz, mintha az integrátor ideális lenne. A bemeneti feszültség integrálásához a K3 és K4 kapcsolót nyitjuk, a K1-et zárjuk. Mivel az Uk feszültség ez idô alatt a CNull kondenzátoron tárolva meg-marad, ezért a nullpont is az integrálási fázis alatt kiegyenlített marad. A null-pont driftet ekkor csak a rövid idejű stabilitás határozza meg. A komparátor ofszet hibájának hatását ez az eljárás csaknem kiküszöböli. Nyugalmi állapot-ban ugyanis az integrátor U1 kimeneti feszültsége nem 0, mint az elôzô kap-csolásnál, hanem a komparátor elôerôsítôjének ofszet feszültségére áll be, te-hát éppen az elrendezés billenési küszöbfeszültségének értékére. Mivel a kompenzáló körben két erôsítô van sorba kötve, ezért könnyen lengé-sek jöhetnek létre a szabályzókörben. A stabilizáláshoz a CNull kondenzátorral sorba köthetünk egy ellenállást. Ezenkívül célszerű a komparátor elôerôsítôjé-nek erôsítését 100-nál kisebbre választani. Ezáltal egyszerűbben elérhetô kis késleltetési idô is, ami lényeges komparátor üzemmódban, vagyis az integrá-lási idôtartamok alatt.
Típus Gyártó Felbontás Párhuzamos/multiplex
Bináris /BCD
Tápfeszült-ség [V]
Teljesítmény-felvétel [mW]
ADC EK 8 B Datel 8 bit párhuzamos bináris ±5 20 ADC EK 12 B Datel 12 bit párhuzamos bináris ±5 20 ADC EK 12 D Datel 3˝ digit párhuzamos BCD ±5 20 MC 14433 Motorola 3˝ digit multiplex BCD ±5 8 ADC 3511 National 3˝ digit multiplex BCD 5 2,5 ADC 3711 National 3ľ digit multiplex BCD 5 2,5

D/A és A/D átakítók 48
BME Közlekedésautomatikai Tanszék
S 190* Siemens 3ľ digit multiplex BCD 12 40 ICL 7135 Harris 3ľ digit multiplex BCD ±5 10
7 szegmenses kijelzőkhöz LED/LCD
ICL 7106 Harris 3˝ digit párhuzamos LCD 9 10 ICL 7107 Harris 3˝ digit párhuzamos LED ±5 10 ICL 7136 Harris 3˝ digit párhuzamos LCD 9 0,5 ICL 7137 Harris 3˝ digit párhuzamos LED 5 0,5 ADD 3501 National 3˝ digit multiplex LED 5 2,5 ADD 3701 National 3ľ digit multiplex LED 5 2,5 ICL 7129 Harris 3ľ digit multiplex LCD 9 10 * Automatikus méréshatár-átkapcsolás támogatással
41. ábra
Monolit integrált A/D átalakítók, amelyek dual slope eljárással működnek Kettôs integrálású (dual slope) A/D átalakítók általában monolit CMOS integ-rált áramköri kivitelben kaphatók. Két fô csoport különböztethető meg: az egyikhez tartozó típusokat általános alkalmazásra szánták, (különösen mikro-számítógéphez történô illesztésre); a másik csoport tagjait speciálisan kijelzôk meghajtására tervezték. Míg az elôbbiek kimenete általában bináris, ill. BCD kódú, addig az utóbbiak többnyire 7 szegmensű kijelző vezérlésére alkalmas kimenettel rendelkeznek. Néhány példát a 41. ábrán foglaltunk össze.
II.3.5. Feszültség-frekvencia átalakítók (U-F konverterek): A digitális kimeneti jel ebben az esetben logikai szintű impulzussorozat frek-venciája (amelyből szám-információ adott, egységnyi ideig történő számlálás-sal nyerhető). Egy lehetséges változatot mutat be a 42. ábra. Mivel az integrá-tor kimeneti jelének meredeksége arányos Ube-vel, az átalakító linearitása csak az integrátor linearitásán múlik. A pontosságot az R, a C és az Uref értéke ha-tározza meg. A 43. ábrán látható diagram az U-F konverter működését szem-lélteti. A feszültség-frekvencia (U-F) konvertereket általában egyszerűbb, kis igényű rendszerekben alkalmazzák.
R C
-Uref
-+
Ui
-+
+Ube
Vezérlés
R
S Q-+
-+
Ube-U be
11
Q = 0 : +U
Q = 1 : -Ube
be
Kimenet
42. ábra

D/A és A/D átakítók 49
BME Közlekedésautomatikai Tanszék
Feszültség-frekvencia átalakító elven működő A/D átalakító
-Uref
Integrátorkimenet
Flip-flopkimenet
0V
Q
U = 1Vbe U = 0,5Vbe U = 0Vbe
-U be
+Ube
-U be
+Ube +Ube
1 kHz 0,5 kHz 0 kHz
43. ábra
Feszültség-frekvencia átalakító működése Az U-F konverterek általában nem valódi aránymérők. Valódi aránymérőkké tehetők a következő ábra szerinti kapcsolással:
Ube
Uref
K 1
K 2
K 3
U-Fkonverter
44. ábra
U-F konverter valódi aránymérővé való átalakítása A 45. ábra táblázatában néhány U-F átalakítót mutatunk be jellemző paramé-tereikkel.
Típus Gyártó Frekvencia Bemeneti feszültség
Linearitás hiba(max.)
VCF32P Burr-Brown max. 500kHz* * ±0,01% VCF32M Burr-Brown max. 500kHz* * ±0,05% VCF42 Burr-Brown 0-10kHz 0...+10V ±0,01% VCF52 Burr-Brown 0-100kHz 0...+10V ±0,05% VCF62 Burr-Brown max. 1MHz* * ±0,002% VCF320 Burr-Brown max. 1MHz* * ±0,002% VCF100G Burr-Brown max. 2MHz* 0...+10V ±0,1% VCF101N Burr-Brown max. 2MHz* 0...+10V ±0,02% VCF110 Burr-Brown max. 4MHz* 0...+10V ±0,05% AD652 Analog Dev. 2MHz* 0...+10V±5V 0,005-0,05%

D/A és A/D átakítók 50
BME Közlekedésautomatikai Tanszék
AD650 Analog Dev. 1MHz* 0...+10V±5V 0,005-0,1% AD654 Analog Dev. 500kHz 0...+VCC 0,1-0,4% ADVFC32 Analog Dev. 500kHz 0...+10V 0,01-0,2% AD537 Analog Dev. 150kHz -VCC...+VCC 0,07-0,25%
* A felhasználó által programozható / választható VCC: tápfeszültség
45. ábra Néhány feszültség-frekvencia konverter jellemző paramétere
A feszültség-frekvencia konverterekhez hasonlóan léteznek frekvencia-fe-szültség átalakítók is, amelyek bemenete különböző frekvenciaérték, kimenete pedig a bemenetre kapcsolt frekvenciának megfelelő analóg feszültségérték. Ezen típusú átalakítók működése leginkább a D/A átalakítókéhoz hasonlítha-tó. Az utóbbi időkben az ilyen fajta átalakítókat egyre gyakrabban alkalmazzák következő előnyös tulajdonságaik miatt:
- kevés vezeték (csak egy kimenet van), - PC-hez könnyen illeszthető, - a kapcsolás technikailag egyszerű (8-10 lábú IC tokozás), - a vezérlő elektronikától tetszőlegesen távol lehet (100-200m), - optikai leválasztást biztosít, akár 380V is adható a bemenetre
anélkül, hogy ez a vezérlő elektronikát károsítaná, - a kapuidő szoftveres állításával a felbontás és a sebesség
változtatható.
II.3.6. "Egy-bites", "delta" átalakítók Nagyobb pontossági követelmény esetén (valamint analóg jelek digitális for-mában való távadásához, telemetriához, hírközléshez stb.) a feszültség-frek-vencia átalakítók pontosabb változatát alkalmazzák. A töltés kiegyenlítéses (Charge-Balancing, Δ-Σ : delta-szigma) átalakítók egy lehetséges kialakítását mutatja a 46. ábra. A komparátor "figyeli" az integrátor kimeneti feszültségét és minden Clock jel pillanatában úgy módosítja a D flip-flop állapotát, hogy a negatív referencia feszültség be-, illetve kikapcsolásával az átlagos töltésegyensúly helyreálljon, az integrátor kimeneti feszültsége zérus felé konvergáljon. Ha a bemeneti feszültség kicsi, akkor ritkán, kevés órajel időtartamra kell csak a referenciát bekapcsolni, a soros kimeneti jel kevés 1-est tartalmaz. Ha a bemeneti feszültség a végkitérés fele (0,5 V), akkor egy órajelre

D/A és A/D átakítók 51
BME Közlekedésautomatikai Tanszék
bekapcsolódik, egy órajelre kikapcsolódik a referencia; a kimeneti jelben minden második periódus lesz 1-es (50%-os az 1-esek aránya), és így tovább.
U be
Integrátor
Clock kimenet
-+
Soros kimenet
R
-+Komparátor
C1
R
Uref
D Q
CL
Clock
-1V
0...+1V
D flip-flop
Vezérlés: ha Q = 0, kikapcsolvaha Q = 1, bekapcsolva
46. ábra Δ-Σ : delta-szigma átalakító lehetséges kialakítása
Maximális (+1V) bemeneti feszültségnél gyakorlatilag minden CLOCK perió-dusban 1-es a kimeneti jel. Vagyis a kimeneti jelben az 1-es periódusok (n1) számának és az összes periódus számának aránya éppen a mérendő Ube ará-nyát adja Uref - hez képest. A töltés-egyensúly feltétele:
( )n n U n Ube ref0 1 1 0+ − = ahol n0: adott idő alatt a kimeneti "0"-k száma n1: a kimeneti "1"-ek száma. Ebből:
UU
nn n
be
ref
=+1
0 1
Meg kell említeni, hogy az ilyen típusú A/D átalakítók biztosítják a legna-gyobb pontosságot. Ennél pontosabb átalakítók technológiai, technikai okok miatt (pl. zaj, kontakt potenciál) nem gyárthatók. A Δ-Σ átalakító legfontosabb jellemzői a következők:
- valódi aránymérő, - a teljes konverziós ciklusidő alatt foglalkozik a bemenő jellel, - a konverziós idő független a bemenő jel nagyságától,

D/A és A/D átakítók 52
BME Közlekedésautomatikai Tanszék
- folyamatosan a nullpont környezetében dolgozik. Néhány Δ-Σ átalakítót mutatunk be jellemző paramétereikkel az 47. ábra kö-vetkező táblázatában.
Típus Gyártó Felbontás Bemeneti frekvencia
Referencia feszültség
Busz interfész
AD776 Analog Dev. 16 50kHz 2V, belső soros AD1878 Analog Dev. 16 24kHz 3V, külső soros AD1879 Analog Dev. 18 24kHz 3V, belső soros AD7716 Analog Dev. 20 18,5...300kHz 2,5V, belső soros AD7710 Analog Dev. 21 2,62...262Hz 2,5V, belső soros, μP AD1849 Analog Dev. 16 8...48kHz 2,25V, belső soros
47. ábra
Néhány delta-szigma konverter jellemző paramétere
II.3.7. A/D átalakítók realizálása mikroprocesszor felhasználásával A mikroprocesszorok tömeges elterjedése óta (80-as évek eleje) új irányzat az analóg-digitál átalakítók realizálására (különösen nagypontosságú DVM-ek, multiméterek, "ipari" mérés-adatgyűjtő rendszerek céljaira), hogy nem hasz-nálnak fel erre a célra készült LSI áramkört, hanem csak a legszükségesebb analóg hardvert építik fel, és ennek irányítását, az egész konverzió végre-hajtását egy mikroprocesszor-rendszerre bízzák. A konverzió szoftver úton történik. Az algoritmus olyan, hogy a meglehetősen igénytelen analóg elek-tronikus rész összes hibáját automatikus nulla-méréssel, automatikus kalibrá-cióval gyakorlatilag észrevehetetlenné teszik (egyedül a referencia feszültségnek kell pontosnak lennie!). Az átalakítás leggyakrabban töltés kiegyenlítéses elvű, annak valamilyen módosulata. A 48. ábra egy ilyen példát mutat (a Hewlett Packard HP 3455 A DVM átalakítójának vázlata).

D/A és A/D átakítók 53
BME Közlekedésautomatikai Tanszék
Ube
2R
-+
C
R
-Uref
-+
Ui
-+
-Ucomp
DIGITÁLIS EGYSÉG
MIKROSZÁMÍTÓGÉP
Sample counter200000 Display counter
Stop Display value(Kijelzett érték)(Állj)
n 0 n x
n T f0 0= ( )n n t t t fx c r f= + + 0
48. ábra Mikroprocesszor vezérlésű A/D átalakító
Az "analóg elektronika" egy integrátorból és két komparátorból áll. Az integ-rátor töltődését az Ube mérendő feszültséggel, illetve az Uref referencia feszült-séggel lehet vezérelni 2R, illetve R-en keresztül a megfelelő elektronikus kap-csoló segítségével. A vezérlő egység az Ube-et a teljes T mérési ciklus alatt az integrátorra kap-csolja. Amikor az integrátor kimeneti feszültsége elér egy meghatározott ( -Ucomp) feszültséget, rákapcsolja a referencia forrást is egy rögzített (tc) időtar-tamra, ennek elteltével Uref-et leveszi és így tovább, egészen a T végéig. Az u-tolsó szakaszon lehet, hogy egy teljes tc-re "nincs idő", akkor tr marad. A leg-utolsó fázisban csak a referenciával téríti vissza 0V-ra az integrátort (ehhez tartozik tf idő). A tc időtartamok, valamint tr és tf alatt a "display counter" (ki-jelző számláló) egy órajel impulzusait számolja, a T időt pedig a "sample counter" (mintavételi időt meghatározó számláló) jelöli ki ugyanezen órajel adott számú periódusának (200 000) megszámlálásával. A töltésegyensúly feltétele:

D/A és A/D átakítók 54
BME Közlekedésautomatikai Tanszék
( )U TR
n t t t UR
be c r f ref
2=
+ +
ahonnan UU
n t t tT
nn
be
ref
c r f x=+ +
=2 20
vagyis Ube referenciához viszonyított értéke a display counter-rel megszámolt nx-szel arányos (a jel 20 ms-ig átlagolódik az integrátoron). Az így kapott e-redmény sok hiba-komponenst tartalmaz (R-ek hibája, kapcsolók hibája, Ucomp eltérése, integrátor ofszetje stb.) Mindez a rendszerben egy Uos offset fe-szültséggel és egy (hibás) "A" rendszer-erősítéssel modellezhető. A hibakiik-tatás úgy történik, hogy a mikroprocesszor az átalakítóval 3 mérést végeztet (ld. 49. ábra) : megméri ugyanazzal a rendszerrel Ube-et, egy nagyon pontos referenciát és a precíz 0 V-ot.
1
U0s
ADCA0Rész-
eredmény23
Ube
Uref
0V
E 1
E 2
E 3
49. ábra Hibakiiktatás elvi kapcsolása
Ezen mérések eredményeiből kiszámítja a pontos eredményt:
( )( )E E E
E EA U U AUA U U AU
UU
be os os
ref os os
be
ref
=−−
=+ −
+ −=1 3
2 3
Hasonló elven működik pl. a KEITHLEY 191-es multimétere is (ebben sincs LSI átalakító, csupán néhány átlagos minőségű erősítő, kapcsoló, egy jó mi-nőségű integráló-kondenzátor és feszültség referencia - minden más funkciót, pl. a mérési "pontszám", a felbontás 256-szorosra növelését egy 6802-es mik-roprocesszor végzi. Az egész multiméter programja 512 byte-ban fért el). Az ilyen kategóriájú műszerek szokásos pontossága legalább 0,001%.

D/A és A/D átakítók 55
BME Közlekedésautomatikai Tanszék
III. Az A/D és D/A átalakítók kiegészítő eszközei A konverterek felépítéséhez, valamint A/D és D/A konvertereket tartalmazó rendszerek felépítéséhez az eddig részletesen tárgyalt eszközökön (erősítőkön, áramgenerátorokon, létrahálózatokon stb.) kívül egyéb kiegészítő eszközökre, egységekre is szükség van, amelyeket esetenként egy tokba (egy IC-be) integ-rálják az átalakítóval:
- analóg kapcsolókra, - "programozható" osztókra, erősítőkre, - analóg multiplexerekre, - mintavevő-tartó (Sample and Hold) áramkörökre.
Ezek felépítésével, működésével, kialakításával ebben a segédletben nem fog-lalkozunk.
IV. A/D és D/A átalakítók felhasználása Az A/D és D/A átalakítókat gyakorlatilag minden bonyolultabb elektronikával rendelkező berendezésben felhasználják. A hétköznapi életben ilyen áramkö-röket tartalmaz az autó, tv, mosógép, hifi berendezések stb. Az ipari felhasználás területéről meg kell említeni többek között a különféle mérési adatgyűjtő kártyákat, berendezéseket, az asztali-kézi multimétereket, a digitális szabályzókat (DDC = Direct Digital Control) és a programozható lo-gikai vezérlőket (PLC = Programmable Logic Control). Az A/D és D/A átala-kító áramköröket előszeretettel alkalmazzák az egyes folyamatokat felügyelő digitális folyamatszabályzó rendszerekben. A mérő és adatgyűjtő rendszerek tervezésének, az A/D ill. D/A átalakítók megválasztásának főbb szempontjait elsősorban a mérendő mennyiség jellege és a mérés környezete határozza meg. A megoldandó feladat általában egy, vagy több A/D ill. D/A átalakítás megvalósítása információ veszteség nélkül. Lényeges szempontok: 1. Pontosság: Általában 6-20 (max. 28 egyes nagy pontosságú digitális
mérőműszereknél) bit között változhat, a feladat jellegétől függően (pl. 5 digites lázmérő készítése értelmetlen, de ha alátervezünk - 2 digites kijelző - akkor információt veszí-tünk).

D/A és A/D átakítók 56
BME Közlekedésautomatikai Tanszék
2. Sebesség: A feladat jellegéből adódóan a mérendő jel sávszélességé-től függően 3-107 darab mérést kell elvégezni másodper-cenként (ennél nagyobb számú mérés esetén a tárolás nem biztosítható). A digitalizálni kívánt U(t) feszültség idő függvény Fourier soraiból az adatgyűjtés szempontjából érdekes, informatív komponens frekvenciájának legalább kétszerese kell, hogy legyen a mintavételezés frekvenciája (Shanon mintavételezési tétele).
3. Adattárolás: A mérés, adatgyűjtés tárolási igénye függ a mérendő
mennyiség jellegétől, a megkívánt pontosságtól, illetve a mérés sebességétől. Például 106 darab mérés/másodperc sebesség és 10 bit pontosság esetén kb. 2 Mbyte mérési eredmény keletkezik másodpercenként, amely felveti a mért adatok tárolásának és előzetes feldolgozásának, szűré-sének problémáját.
4. Egyebek: További tervezési szempontként többek között figyelembe
kell venni: - a környezeti hatásokat (laboratóriumi, ipari, szélsőséges,
extrém), - a bemeneti jelszintet, - a párhuzamosan kezelendő csatornák számát, - a megbízhatósági szempontokat, - a zavar- és zajérzékenységet valamint, - az érintésvédelmi szabályokat is.
Az A/D és D/A átalakítókkal kapcsolatban meg kell jegyezni, hogy nagyon széles kínálati palettával rendelkeznek. Egy-egy cég kb. 100-200 különböző típust gyárt.

D/A és A/D átakítók 57
BME Közlekedésautomatikai Tanszék
Irodalomjegyzék [1] U.Tietze-Ch.Schenk: Analóg és digitális áramkörök. Műszaki könyvki-
adó, Budapest, 1990.
[2] Megyeri József: Számítógépes folyamatirányítás. BME Villamosmér-nöki kar, Budapest, 1988.
[3] Kerényi István-Tuzson Tibor: Analóg perifériák mikroprocesszoros rendszerekhez. BME Mérnöktovábbképző Intézet, Budapest, 1986.
[4] Dr.Komarik József: Analóg perifériális áramkörök számítógépekhez. BME Mérnöktovábbképző Intézet, Budapest, 1992.
[5] Bahtiarov-Malinyin-Skolin: Analóg-digitális átalakítók. Műszaki könyvkiadó, Budapest, 1990.
[6] 1992 Short From Designers’ Guide. Analog Devices, 1992.
[7] Zsom Gyula: Digitális technika I. II. Műszaki könyvkiadó, Budapest, 1988

D/A és A/D átakítók 58
BME Közlekedésautomatikai Tanszék
MÉRÉSI ÚTMUTATÓ

BME KÖZLEKEDÉSMÉRNÖKI KAR
KÖZLEKEDÉSAUTOMATIKAI TANSZÉK
BME Közlekedésautomatikai Tanszék
DIGITÁLIS - ANALÓG ÉS ANALÓG - DIGITÁLIS ÁTALAKÍTÁS MÉRÉSE
A mérés célja, a súlyozásos közelítés elvén működő 5 bites D/A átalakító, a számláncot alkalmazó eljárás alapján működő D/A átalakító, valamint a köve-tő (servo, tracking) elven működő A/D átalakító vizsgálata. A. Mérési feladatok 1. Határozza meg a súlyozásos közelítés elvén működő 5 bites D/A átalakító
valamennyi lehetséges kimeneti feszültség értékét. A mért értékeket foglal-ja táblázatba. Lineáris regresszió segítségével határozza meg az átalakítás pontosságát. Jelenítse meg az oszcilloszkóp képernyőjén a D/A kimenetét, ha bemeneti értékei 0-31 között folyamatosan és ciklikusan változnak. A jelalakot ábrázolja milliméterpapíron.
2. Írjon PASCAL programot, amely a súlyozásos közelítés elvén működő 5
bites D/A átalakító kimenetén a szinusz függvénynek megfelelő jelalakot állítja elő. Oszcilloszkóp segítségével jelenítse meg a szinusz függvényt. A jelalakot ábrázolja milliméterpapíron.
3. Határozza meg a számláncot alkalmazó eljárással működő D/A átalakító
legalább 11 lehetséges kimeneti feszültség értékét. A mért értékeket foglal-ja táblázatba. Lineáris regresszió segítségével határozza meg az átalakítás pontosságát. A bemeneti impulzussorozatokat ábrázolja milliméterpapíron.
4. A követő A/D átalakítás elvén működő átalakító segítségével mérjen le
legalább 8, külső feszültségforrásból származó feszültséget (0 - 4V DC). Számítsa ki az átalakítás hibáját.
B. Elméleti ismeretek
Kiadott segédletből: D/A és A/D átalakítók működése,
Elektrotechnika c. tantárgyból: az elektronikus feszültségmérő és az oszcilloszkóp használata,
Számítástechnika c. tantárgyból: Turbo PASCAL programozási nyelv,

D/A és A/D átakítás mérése 2
BME Közlekedésautomatikai Tanszék
Matematika c. tantárgyból: lineáris regresszió alkalmazása.

D/A és A/D átakítás mérése 3
BME Közlekedésautomatikai Tanszék
C. A mérési feladatok leírása A méréseket az A/D - D/A átalakító egység segítségével végezzük el. Ennek elvi kapcsolása a következő ábrán látható.
-+
R110k
R210k
R310k
R410k
R510k
R610k
R710k
R910k
R810k
R1110k
R1010k
R1310k
R1210k
D0
D1
D2
D3
D4
PIO2
PIO3
PIO4
PIO5
PIO6
D/A OUT
C1 470nF
R1410k
C2 470nF
R1510kPIO9
D7
PWM IN PWM OUT
R16100k
PIO8ACK
PIO10D6
GND
+5V
Komparátor
A/D IN
GND
GND GND
PIO25GND
GND
LM324N
ZPD 4,7
Z10 - 4V DC
PWM IN
GND
PCpárhuzamos
port
(LPT/PIO)
1. Csatlakoztassa a számítógép párhuzamos portjához (LPT, PIO) az A/D - D/A átalakító egységet. Az átalakító egység D/A OUT és GND kivezetésé-re kösse a rendelkezésre álló elektronikus voltmérőt. A mellékelt PASCAL program megfelelő módosításával és futtatásával mérje le a lehetséges 32 (5 biten 25=32) különböző kimeneti feszültség értéket. A mért értékeket foglalja táblázatba. Csatlakoztassa az oszcilloszkópot a 2. mérésnek meg-felelően. A mellékelt programban végezze el a következő módosítást

D/A és A/D átakítás mérése 4
BME Közlekedésautomatikai Tanszék
(comment): {write('Z erteke: ',i:2); readln;}. Rajzolja le a kapott jelalakot.

D/A és A/D átakítás mérése 5
BME Közlekedésautomatikai Tanszék
LPT/PIO
ElektronikusFeszültségmérõA/D
IND/AOUT
GND
PWMIN
PWMOUTPC
A/D - D/Aátalakító
2. Csatlakoztassa a számítógép párhuzamos portjához (LPT, PIO) az A/D -
D/A átalakító egységet. Az átalakító egység D/A OUT és GND kivezetésé-re kösse a rendelkezésre álló oszcilloszkópot. A mellékelt PASCAL pro-gram megfelelő módosításával és futtatásával hozza létre az oszcilloszkóp képernyőjén a szinusz függvény jelalakját. Rajzolja le a kapott jelalakot.
LPT/PIO
Oszcilloszkóp
A/DIN
D/AOUT
GND
PWMIN
PWMOUT
A/D - D/Aátalakító
PC
3. Csatlakoztassa a számítógép párhuzamos portjához (LPT, PIO) az A/D -
D/A átalakító egységet. Az átalakító egység PWM OUT és GND kivezeté-sére kösse a rendelkezésre álló elektronikus feszültségmérőt valamint a PWM IN és a GND kivezetésre az oszcilloszkópot. A mellékelt PASCAL program megfelelő módosításával és futtatásával mérjen le 11 különböző kitöltési tényezőhöz (0%-100%, 10%-onként) feszültségértéket. A mért ér-tékeket foglalja táblázatba. Rajzolja le a 10%, 50% és 100% kitöltési té-nyezőkhöz az oszcilloszkóp képernyőjén látható impulzussorozatokat.
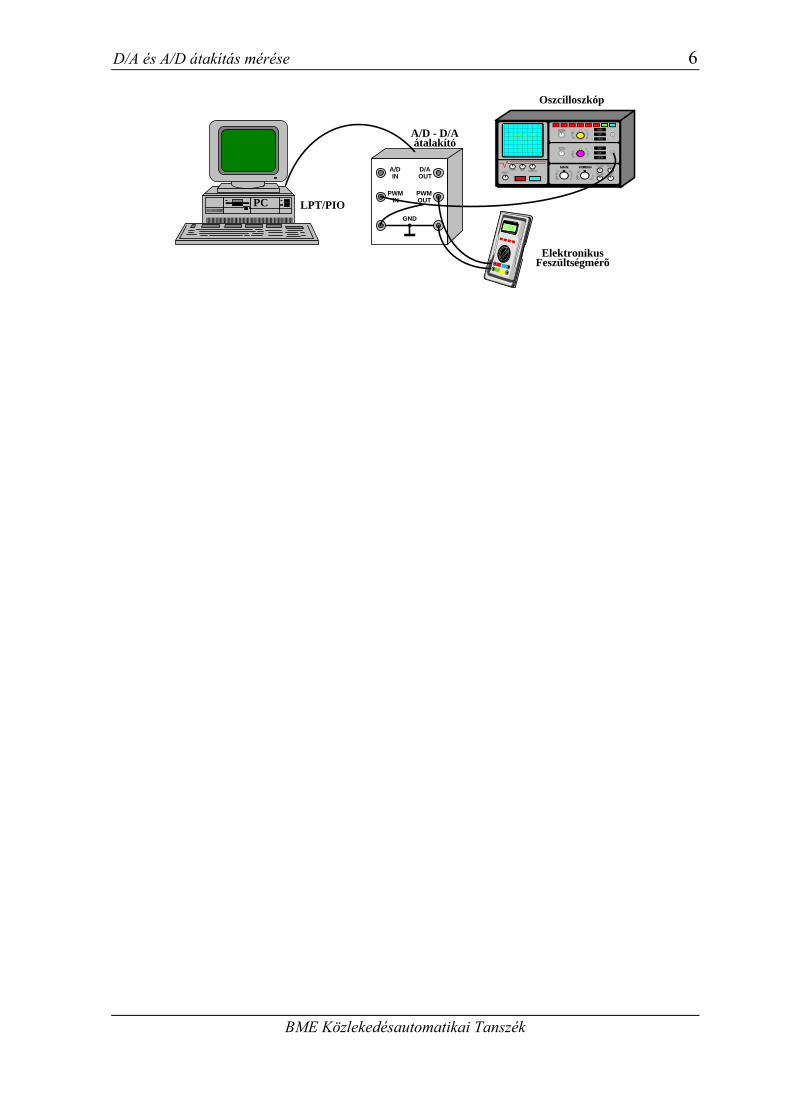
D/A és A/D átakítás mérése 6
BME Közlekedésautomatikai Tanszék
LPT/PIO
ElektronikusFeszültségmérõ
Oszcilloszkóp
A/DIN
D/AOUT
GND
PWMIN
PWMOUT
A/D - D/Aátalakító
PC

D/A és A/D átakítás mérése 7
BME Közlekedésautomatikai Tanszék
4. Csatlakoztassa a számítógép párhuzamos portjához (LPT, PIO) az A/D - D/A átalakító egységet. Az átalakító egység A/D IN és GND kivezetésére kösse a rendelkezésre álló 10kΩ-os potenciométerrel leosztott központilag kiadott 4V-os egyenfeszültséget. Az elektronikus feszültségmérő segítsé-gével folyamatosan mérje az A/D IN bemenetre jutó feszültséget. A mellé-kelt PASCAL program futtatásával mérjen le 8 különböző feszültséget (0V-4V-ig, 0,5V-onként). A mért értékeket foglalja táblázatba.
LPT/PIO
ElektronikusFeszültségmérõ
Potenciométer (10k)
+4V
GND
A/DIN
D/AOUT
GND
PWMIN
PWMOUT
A/D - D/Aátalakító
PC
D. Felhasználható eszközök
A mérési feladat elvégzéséhez a következő eszközök használhatók: • A/D - D/A átalakító egység, • PC számítógép Turbo PASCAL programozási környezettel, • elektronikus feszültségmérő, • oszcilloszkóp, • 10kΩ-os potenciométer. A 4. mérési feladathoz központilag kiadott 4V egyenfeszültség áll ren-delkezésre.
E. A mérés menete, értékelés
A mérés előtt elő kell készíteni a mellékletben közölt programok meg-felelő módosításait, illetve a mérési eredmények, grafikonok számára szükséges táblázatokat. A mérés értékelését jegyzőkönyvben kell elvé-gezni, amelynek az általános követelményeken túl (ld. Elektrotechnika c. tantárgy mérési jegyzőkönyv követelmények) a következőket kell, hogy tartalmazza:

D/A és A/D átakítás mérése 8
BME Közlekedésautomatikai Tanszék
1.mérés: a mért értékek táblázatba és grafikonba foglalva, az átala-kítás lineáris regresszióval történő közelítése. Az átalakítás maximális és átlagos hibájának számítása. A statikus jel-lemzők meghatározása (nullpont hiba, maximális érték hi-bája, linearitás hiba, monotonitási hiba). Az oszcilloszkóp-ról vett jelalak milliméterpapíron ábrázolva.
Z (0-31)
Mért Uki
[V]
Lineáris regresszi-óval számított Uki
(yLR) [V]
Ideálisnak feltételezett Uki
(yID) [V]
yLR-yID
[V]
2.mérés: a D/A átalakítóval előállított szinusz függvény oszcillosz-
kópról vett jel alakja milliméterpapíron ábrázolva.
3.mérés: a mért értékek táblázatba és grafikonba foglalva, az átala-kítás lineáris regresszióval történő közelítése. Az átalakítás maximális és átlagos hibájának számítása. A statikus jel-lemzők meghatározása (nullpont hiba, maximális érték hi-bája, linearitás hiba, monotonitási hiba). Ábrázolja milli-méterpapíron a 10%, 50% és 100% kitöltési tényezőkhöz az oszcilloszkóp képernyőjén látható impulzussorozatokat.
Kitöltési tényező
(0%-100%)
Mért Uki
[V]
Lineáris regresszi-óval számított Uki
(yLR) [V]
Ideálisnak feltételezett Uki
(yID) [V]
yLR-yID
[V]
4.mérés: a mért értékek táblázatba foglalva, az átalakítás lineáris
regresszióval történő közelítése. Az átalakítás maximális és átlagos hibájának számítása. A statikus jellemzők meghatá-rozása (nullpont hiba, maximális érték hibája, linearitás hi-ba, monotonitási hiba).
Mért Ube
[V]
Z
Lineáris regresszi-óval számított Z
(yLR)
Ideálisnak feltételezett Z
(yID)
yLR-yID

D/A és A/D átakítás mérése 9
BME Közlekedésautomatikai Tanszék
Budapest 1995. október

D/A és A/D átakítás mérése 10
BME Közlekedésautomatikai Tanszék
Mellékletek 1., Az 1. mérés mintaprogramja (da.pas):
program da; uses crt; const cim=$378; var i:integer; label ujra; begin clrscr; ujra: for i:=0 to 31 do begin gotoxy(30,12); port[cim]:=i; write('Z erteke: ',i:2); readln; end; goto ujra; end.
2., Az 2. mérés mintaprogramja (sinus.pas)
program sinus; uses crt; const cim=$378; var i:integer; p:array[1..3600] of integer; label ujra; begin clrscr; for i:=1 to 3600 do p[i]:=round(sin(i*pi/180)*15+16); gotoxy(15,12); write('Szinusz fuggveny megjelenitese az oszcilloszkopon'); ujra: for i:=1 to 3600 do port[cim]:=p[i]; goto ujra; end.

D/A és A/D átakítás mérése 11
BME Közlekedésautomatikai Tanszék
3., Az 3. mérés mintaprogramja (pwm.pas)
program pwm; uses crt; const cim=$378; var i,j:byte; c:char; label ujra; begin ujra: clrscr; gotoxy(30,12); write('Kitoltesi tenyezo [%]: '); readln(j); if j<101 then begin repeat for i:=0 to 100 do if i>=j then port[cim]:=0 else port[cim]:=128; until keypressed; c:=readkey; end; goto ujra; end.
4., Az 4. mérés mintaprogramja (servo.pas)
program servo; uses crt; const cim1=$378; cim2=$379; var i:integer; begin clrscr; i:=15; repeat if (port[cim2] and 64) <> 0 then begin if i<31 then inc(i); end else begin if i>0 then dec(i);

D/A és A/D átakítás mérése 12
BME Közlekedésautomatikai Tanszék
end; port[cim1]:=i+64; gotoxy(30,12); write('A mert ertek: ',i,' '); delay(250); until keypressed; end.
5., A lineáris regresszió valamint az egyes hibák számításához szüksé-
ges összefüggések, meghatározások Lineáris regresszió számításához szükséges összefüggések:
y ax b= + x a x b x yii
n
ii
n
i ii
n2
1 1 1= = =∑ ∑ ∑⎛⎝⎜
⎞⎠⎟ ⋅ +
⎛⎝⎜
⎞⎠⎟ ⋅ = x a nb yi
i
n
ii
n
= =∑ ∑⎛⎝⎜
⎞⎠⎟ ⋅ + =
1 1
Maximális hiba: a lineáris regresszióval meghatározott (yLR) és az
ideálisnak feltételezett (yID) - az origót és a maximá-lis mért értéket összekötő - egyenesek közötti maxi-mális eltérés.
Átlagos hiba: a lineáris regresszióval meghatározott (yLR) és az
ideálisnak feltételezett (yID) - az origót és a maximá-lis mért értéket összekötő - egyenesek közötti átlagos eltérés.
Nullpont hiba: az elméleti (ideális) és a mért nullpont különbsége. Maximális érték hibája: a lineáris regresszióval meghatározott maximális és
a mért maximális érték különbsége. Linearitás hiba: egy lépés 1ULSB-től való maximális eltérés. Monotonitási hiba: ha a liearitás hiba nagyobb, mint 1ULSB.
UU
ZZLSB
ki n=−
=max
maxmax1
2 n=felbontás, bit





























