Embed Size (px)
Citation preview
78 Development of planetary precessional transmision with multicouple gear
DEVELOPMENT OF PLANETARY PRECESSIONAL TRANSMISION
WITH MULTICOUPLE GEAR
I. Bostan, Dr.Sc.PhD, prof., V. Dulgheru, Dr.Sc.PhD
Technical University of Moldova
1. INTRODUCTION
Diversity of requirements forwarded by the beneficiaries of mechanical transmissions consists, in particular, in increasing reliability, efficiency and load-carrying capacity, and in reducing the mass and dimensions. It becomes more and more difficult to satisfy the mentioned demands by partial updating of traditional transmissions [1, 2]. The target problem can be solved with special effects by developing new types of multipliers based on precessional planetary transmissions with multiple gear, that were developed by the authors.
The advantages of the precessional planetary transmissions [3] lead to important economic advantage in using such drives. Some of the advantages are:
• high efficiency, rating 96%, is due to the gearing use with convex-concave teeth profile;
• wide range of transmission ratio is from ±8,5 to ±3599 in the drive with only one stage;
• high load-carrying capacity is achieved by meshing with about 100% teeth couples simultaneously engaged compared to 5%-7% - in classical gearings;
• compactness and reduced weight – the specific weight of drives ranges from 0,022 to 0,05 kg/Nm.
• high kinematic accuracy; • high rating life; • low level of noise and vibration from 50 to
60 dB; • low moment of inertia due to the
peculiarities of the spherical motion of the planet pinion.
The engineering methods based on computer permitted to develop a new type of precessional transmissions with multi-couple meshed teeth, which, from the technological point of view, can be manufactured by means of a new method of processing conical teeth with convex-concave profile.
It appeared the necessity of elaboration of new profiles adequate to the sphero-spatial motion of the gears which would ensure high performances to the precessional transmission. Considering the
necessity of achieving the transfer function continuity and gear multiplicity some objectives were taken into account. One of them is the integrated methods of design, modelling and simulation using powerful means of creation and management of parametrical models of the mechanical assemblies on the basis of CAD-CAE platforms. Also, it was necessary to develop new conceptual diagrams of precessional transmissions that function under multiplier regime.
2. STUDY OF PERFORMANCES AND SELECTION OF KINEMATICAL
STRUCTURE The majority of precessional planetary
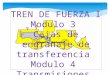
transmissions diagrams developed previously operate efficiently in reducer’s regime [3]. Depending on the structural diagram, precessional transmissions fall into two main types – K-H-V and 2K-H, from which a wide range of constructive solutions with wide kinematical and functional options that operate in multiplier regime. The kinematical diagram of the precessional transmission K-H-V (fig. 1,a), comprises five basic elements: planet career H, satellite gear g, two central wheels b with the same number of teeth, controlling mechanism W and the body (frame). The roller rim of the satellite gear g gears internally with the sun wheels b, and their teeth generators cross in a point, so-called the centre of precession. The satellite gear g is mounted on the planet (wheel) career H, designed in the form of a sloped crank, which axis forms some angle with the central wheel axis θ (nutation angle).
Revolving, the sloped crank H transmits sphero-spatial motion to the satellite wheel regarding the ball hinge installed in the centre of precession. For the transmission with the controlling mechanism designed as clutch coupling (fig.1, a,b), the gear ratio (gear reduction rate) varies in the limits:
cos;
−= − g bg
HVb
z zi
zθ cos
,cos
g bgHV
b
z zi
zθ
θ
−= − (1)

Development of planetary precessional transmision with multicouple gear 79
reaching the extreme values of 4 times for each revolution of the crank H. If necessary this shortcoming can be eliminated using as a controlling mechanism the constant cardan joint (Hooke’s joint), the ball synchronous couplings, etc.
.g bg
HVmedb
z zi
z−
= − (2) 2)
For zg = zb+1, 1 ,gHV
bi
z= − the driving and
driven shafts have opposite directions.
For zg = zb-1, 1 ,gHV
bi
z= the shafts revolve in
the same direction. This kinematical diagram of the precessional
transmission ensures a range of gear ratios i = 8...60, but in the multiplication regime it operates efficiently only for the range of gear ratios i = 8…25. As well, in the controlling mechanism W, that operates with pitch angles of the semi couplings up to 3o, power losses occur reducing the efficiency of the multiplier on the whole.
The precessional transmission 2K-H has higher performances, including the kinetostatic one as well (fig. 1,c, fig. 2). The transmission comprises a satellite gear g with two crown gears Zg1 and Zg2, that gears with the unshiftable b and movable a central wheels.
1
2 1
.g a
b g g a
z zi
z z z z= −
− (3)
The analysis of this relation demonstrates that precessional transmissions 2K-H provide the fulfilment of a large range of transmission ratios i = ± (12...3599) [3]. But in multiplier regime the transmission operates efficiently only in the limits i = ± (12...30). The process of self-braking (self-stopping) occurs at bigger transmission ratios. It is necessary to point out the series of peculiarities of the precessional transmissions 2K-H that ensure higher performances compared to similar planetary transmissions with cylindrical gears: precessional transmissions do not demand conditions of distance equality between the axis. This factor widens the area of their optimal design; precessional transmission kinematics does not limit the selection of the gear couples modules or of the rollers placement pitch. This factor increases the possibilities of shaping teeth pairs and of the transmission ratios interval; the peculiarities of the designed precessional gears allow increasing in the number of teeth that transmit the load simultaneously and this fact reduces significantly the dimensions and mass for the same loads compared to the traditional involute gearings.
Based on the carried out analysis a constructive diagram of the precessional planetary transmission was designed, taken as the base of precessional multipliers design. The precessional planetary transmission (fig. 2) comprises the crank shaft 1 on which the satellite block 2, and the fixed and the movable wheels 3 (the movable wheel is connected to the shaft 5) are installed. The satellite block 2 has two crown gears (6 and 7) with the teeth executed as conical rollers mounted on the axle with
a.
b.
c.
Figure 1. Conceptual diagrams of precesional transmissions.

80 Development of planetary precessional transmision with multicouple gear
1 3 6 2 7 4 5
Figure 2. Constructive diagram of the planetary
precessional transmission 2K-H. the possibility of revolving around them. The transmission operates in the multiplier mode, as follows: at the rotation of the input shaft 5 with the gear 4, due to the difference in the number of geared teeth (Z4 = Z7 - 1, Z3 = Z6 - 1), the satellite block 2 will perform a spherical-spatial motion around the point – centre of precession (the point of intersection of the crown gear roller axes and of the crank shaft axes 1), producing a complete precessional cycle at the rotation of the gear 4 at an angle equal to the angular pitch. Due to its mounting on the sloped side of the crank shaft 1, the precessional motion of the satellite block 2 is transformed into rotational motion of the crank shaft 1 that will produce a complete rotation during a complete precessional cycle of the satellite block.
3. ANALYTIC DESCRIPTION OF TEETH PROFILE AND
JUSTIFICATION OF PRECESSIONAL GEAR PARAMETERS SELECTION
3.1.Analyse of „satellite-driven shaft” link
Teeth profiles have an important role in the efficient transformation of motion in the precessional transmissions that operate as multiplier. Multiple precessional gear theory, previously developed, did not take into consideration the influence of the diagram error of the linking mechanism in the processing device for gear wheel on the teeth profile. Functioning under the multiplication regime, these errors have major influence, which can lead to instant blocking of gear and to power losses. With this purpose, a thorough analysis was conducted on the motion development mechanism under multiplication, and on the teeth profile error generating source. On the basis of
fundamental theory of multiple precessional gear, previously developed, a new gear with modified teeth profile and the technology for its industrial manufacturing was proposed and patented [3].
Cinematically, the link between the semi product and the tool, in which one of them (the tool) makes spherical-spatial motion being, at the same time, limited from rotating around the axis of the main shaft of the teething machine tool, is similar to the „satellite-driven shaft” link from the precessional planetary transmission of the K-H-V type. The kinematical link between the tool and the stationary part of the device represents a Hooke articulation that generates the variability of transfer function in the kinematical link „tool-semi product”. This variation will influence the teeth profile. Thus, the connection of tool with the housing registers a certain scheme error Δψ3 (to understand the deviation of the semi product angle of rotation ψ3 from the angle of rotation of the semi product itself m
3ψ at its uniform rotation):
( )
2 331 3 3 31
3
2
3
;
(cos ) .
m mz zi iz
z arctg tgz
ψ ψ
ψ θ ψ
−= − Δ = − =
= − ⋅
(4)
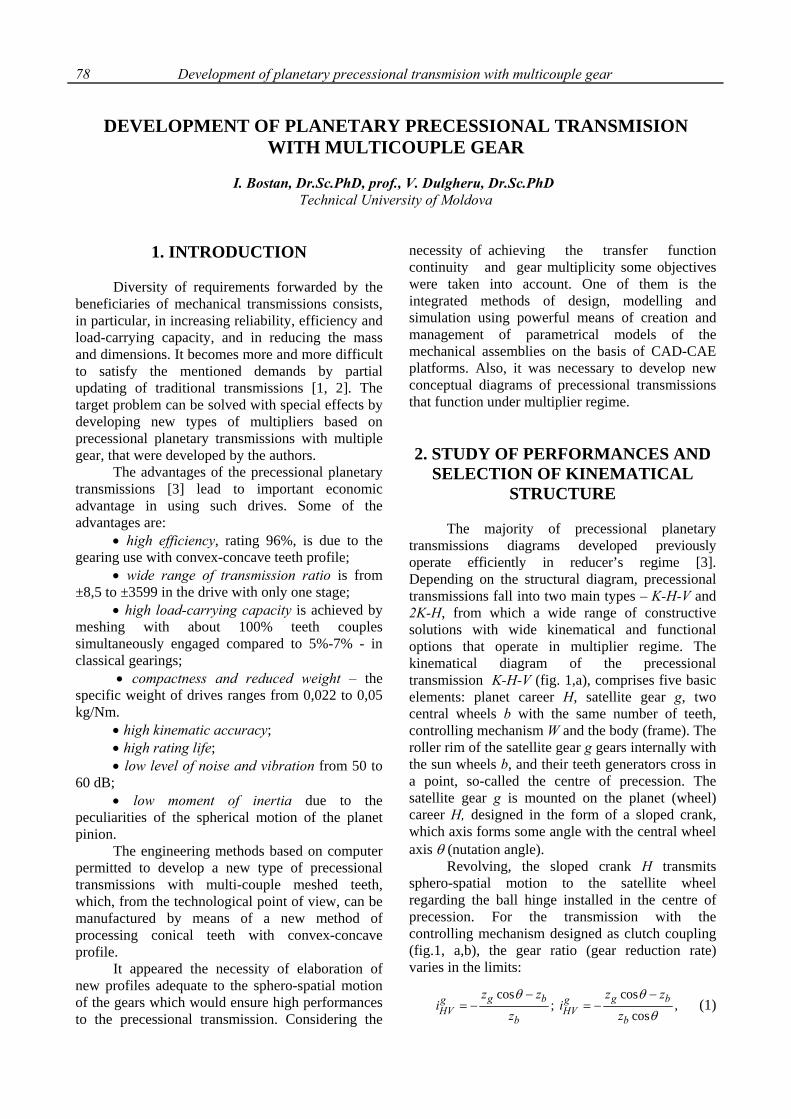
Fig. 3 shows the dependence of the tool
position diagram error Δψ3 at a revolution of the machine tool main shaft ψ. This error is transmitted to the tool that shapes the teeth profile with the same error. To ensure continuity of the transfer function and to improve the performances of precessional transmission it is necessary to modify teeth profile with the diagram error value Δψ3 by communicating supplementary motion to the tool. In this case the momentary transmission ratio of the manufactured gear will be constant. 3.2. Description of teeth profile designed on sphere
Usually, in theoretical mechanics the position of the body making spherical-spatial motion is described by Euler angles. The mobile coordinate system OX1Y1Z1 is connected rigidly with the satellite wheel, which origin coincides with the centre of precession 0 (fig. 4.) and performs spherical-spatial motion together with the satellite wheel relative to the motionless coordinate system OXYZ.
The elaboration of the mathematic model of the modified teeth profile is based integrally on the mathematic model of teeth profile, previously developed by the authors. With this purpose it is


78 Development of planetary precessional transmision with multicouple gear
necessary to present the detailed description of teeth profile without modification and, then, to present of the description of modified profile peculiarities.
An arbitrary point D of the tool axis describes a trajectory relative to the fixed system according to the equations:
( )
( )2 2
2 2
sin sin sin 1 cos cos ;
cos sin cos cos sin ;
sin cos cos sin cos .
m m mD C C
m m mD C C
m m mD C C
X Y Z
Y Y Z
Z Y Z
δ θ θ ψ
δ δ ψ θ ψ
δ ψ θ ψ δ
⎡ ⎤= − + −⎣ ⎦⎡ ⎤= − + +⎣ ⎦
= − + −
(5)
Index m means „modified”. The motion of point Dm compared to the
movable system connected rigidly to the semi product is described by formulas:
1
1 1
11 1
1
cos sin ;
sin cos ;
.
m m mD D D
m m mD D D
m mD D
X X YZ Z
Y X YZ Z
Z Z
ψ ψ
ψ ψ
= −
= +
=
(6)
The projections of point Dm velocities is expressed by formulas:
( ) ( ) ( )
[ ]
2 2
sin cos sin 1 cos cos sin sin sin 1 cos cos 1 cos sin ;
cos sin cos cos sin sin 2cos sin 2cos sin cos ;
m m m m m mD C C C C C
m m m mD C C C
X Y Z Y Z Z
Y Y Z Z
δ ψ θ θ ψ ψ δ ψ θ θ ψ θ ψ ψ
δ δ ψ θ ψ δ ψ ψ θ ψ ψ ψ
• • •• •
• • • •
⎡ ⎤⎡ ⎤= − + − − + − − − ⋅⎢ ⎥⎣ ⎦ ⎢ ⎥⎣ ⎦
⎡ ⎤= − + + + − +⎣ ⎦
(7)
The coordinates of point Em on the sphere is calculated by formulas:
Figure 3. Dependence of the scheme error of tool position Δψ3 at a revolution of the
machine-tool main shaft ψ.
-0,050
-0,040
-0,030
-0,020
-0,010
0,000
0,010
0,020
0,030
0,040
0,050
0 30 60 90 120 150 180 210 240 270 300 330 360
Turaţia axului principal al maşinii-unelte ψ, grade
θ = 1θ = 1.5θ = 2θ = 2.5θ = 3
Sche
me
erro
r of t
oolp
ositi
onΔψ
3=f
(ψ)d
egre
es
Revolution of the machine-tool main shaft, ψ, degrees
-0,050
-0,040
-0,030
-0,020
-0,010
0,000
0,010
0,020
0,030
0,040
0,050
0 30 60 90 120 150 180 210 240 270 300 330 360
Turaţia axului principal al maşinii-unelte ψ, grade
θ = 1θ = 1.5θ = 2θ = 2.5θ = 3
Sche
me
erro
r of t
oolp
ositi
onΔψ
3=f
(ψ)d
egre
es
Revolution of the machine-tool main shaft, ψ, degrees
Figure 4. Tooth profile in normal section

Development of planetary precessional transmision with multicouple gear 79
1 2 1 2
1 1 1 1
2 2 2 2 2 21 1 2 2 1 1 2 2 1 2 1 2
1 2 21 2
;
;
( ) ( ) ( 1) ( ),
1
m m m mE E
m m m mE E
m m m m m m m m m m m mDm
E m m
X k Z d
Y k Z d
k d k d k d k d k k R d dZ
k k
= +
= −
− − − + + + ⋅ − −=
+ +
(8)
where: ( ) 22 1 11
1 2 1
1 1 1 1
coscos ; .m mm D Dm mD D
mDm m m m
D D D D
R d YR Xd dX
X Y X Y
ββ•
• •
+= =
⎛ ⎞−⎜ ⎟⎜ ⎟
⎝ ⎠
( )
21 1 1 1 1 1 1
1 1 11 2
11 1 1 1 1
; ;
m m m m m m mD D D D D D D m m m
D Dm mmDm m m m m
D D D D D
X X X Y Y Z Xk Y Z
k kX
Z X Y Y X
• • •
• •
⎛ ⎞+ +⎜ ⎟⎜ ⎟ +⎝ ⎠= = −
⎛ ⎞−⎜ ⎟⎜ ⎟
⎝ ⎠
According to the obtained analytical relations a soft for the calculation and generation of teeth was developed in CATIA V5R7 modelling system that allowed obtaining the modified trajectories of points Em
e and Emi on the spherical front surfaces, both
exterior and interior ones, by which the teeth surface was generated (fig. 5).
Description of modified teeth profile projected on a transversal surface. Projection of point Em on the tooth transversal plane has the following coordinates:
1 1 1, Y , Z ,m m m m m m m m mE E E E E EX X Y Zε ε ε′′ ′′ ′′ ′′ ′′= ⋅ = ⋅ = ⋅ (9)
where 1 1 1
.mm m mE E E
DAX BY CZ
ε = −+ +
The modified teeth profile in plane is described by the equations:
( )
( )
( )
1 1
1 1
cos cos sin ;
sin sin cos sin cos
sin cos .
m m mE D E
m m mE D E
mD E
X R YZ Z
X R YZ Z
R Z
π πξ δ θ β
π πζ γ δ θ β γ
δ θ β γ
⎡ ⎤′′ ′′= + + + +⎣ ⎦
⎡ ⎤′′ ′′= − + + + +⎣ ⎦
⎡ ⎤′′+ + + +⎣ ⎦
(10)
A wide range of modified teeth profiles with different geometrical parameters were generated in MathCAD 2001 Professional software (fig. 6). The solid model of a gear wheel is shown in fig. 7. Based on the carried out research it was established that from the point of view of decreasing energy losses in gearing, in the multiplication mode of operation, the gearing angle should be α > 450 , and the nutation angle (the pitch angle of the crank shaft) should be – θ ≤ 2,50. This is dictated by the reverse principle of movement in the multipliers compared to the reducers: the axial component of the normal force in gear must be maximal to drive the crank shaft in the rotation movement through the satellite wheel. 3.3. Design of precessional transmission structure
On the basis of the undertaken study, diagram 2K-H (fig. 1,a) was selected for the development of planetary precessional transmission. As a result of analysis of a wide range of tooth profiles with different geometrical parameters of gear by using the mathematical modelling package MathCAD 2001 Professional, the optimum tooth profiles were selected with account of their functioning in real conditions. Also, in MathCAD 2001 Professional software the calculation of geometrical parameters of precessional gear was done. The structure of planetary precessional reducer were designed in SolidWorks software. The planetary precessional reducer is connected by flange with an electric motor, which allows obtaining a compact module, coaxial with the working machine. The structure
Figure 5. Teeth generating surface.

Figure 6. T
Figure 8. g
Devel
Teeth profiles
Planetary prgeneral view
lopment of p
s for reducers(b).
a.
b. recessional tr
w; b – section
planetary pre
s (a) and mul
ransmission: n view.
ecessional tra
frretea oApanraw
reefo
hele
a
pnweltr
1RVW2TF3inTS
ltipliers
a –
ansmision wi
rom fig. 8 iseducer funcemperatures.nd functionin
of the preceAutoDesk M
recessional tnd mass, higatio up to i =
with satisfacto
4
Amongesults of thefficient driveollowings:
• the prhigh load-cafficiency; hievel and vibr
• costss the costs of
The recessional t
new schemawith constantlaboration oransmissions
. Muns D.,
Roloff/Matek Vieweg& SohWiesbaden, (2
. Boge A.Technik. EdFachverlage
. Bostan I.nventions. V
TransmissionSRL, 2011. Pp
Recomm
ith multicoup
proposed foctioning in To simulateng, the dynamessional redMotionInventransmissiongh lifting cap= 144 (based ory mechani
4. CONCL
g the characte research ine developme
recessional darrying capaigh kinematrations; s of drives bf other equivstructural transmission
atics of pret and variablof new sches for specific
Bibliog
, Wittel H., Maschinene
hn Verlag/GW2008). pp. 75
Vieweg Had. Vieweg&GmbH, Wies
I., Dulgheru Volume 1. s (in Romp.594. ISBN:
mended for p
ple gear
or planetary conditions
e the multiplimic compute
ducer was dntor. The n has reducedpacity and mon a two stacal efficienc
LUSIONS
teristics of thn the field
ent we can en
drives elaboracity; high tic accuracy
becomes movalent drives.
optimizationns will allow ecessional trle transmissiematics of running con
graphy
Jannasch Delemente, VoWV-Fachver52-755. andbuch Ma& Sohn Vsbaden, (200
V. et all. APlanetary P
manian). Bon: 978-9975-4
publication:
79
precessionals of lowerier assemblyerised modeldeveloped in
planetaryd dimensions
multiplicationage diagram)cy.
he estimatedof new and
numerate the
rated ensure:mechanical
y; low noise
ore attractive. n of thesynthesis of
ransmissionson ratio andprecessional
nditions.
D., Vobiek J.olume 2, Ed.rlage GmbH,
aschinenbau-Verlag/GWV-04). pp. I150.Anthology ofPrecessionalns Offices”4100-9-0
13.08.2012.
9
l r y
n y s n )
d d e
: l e
e
e f s d l
--
f l
”