Embed Size (px)
Citation preview

IEEJ Journal of Industry ApplicationsVol.5 No.6 pp.429–438 DOI: 10.1541/ieejjia.5.429
Paper
Development of Design Methodology for 60 HzWireless Power Transmission System
Hiroki Ishida∗ Member, Hiroto Furukawa∗∗ Member
Tomoaki Kyoden∗∗∗ Non-member
(Manuscript received Feb. 3, 2016, revised May 6, 2016)
We previously reported a 60 Hz wireless power transmission (WPT) system, which is a system that uses the com-mon utility frequency. In the study reported in paper, we solved several issues in order to install this system in a smallelectric vehicle. First, an accelerated finite difference time domain (FDTD) method using a graphics processing unitwas developed to solve the issue of computation time. Next, theoretical equations for the transmission efficiency (η)and power (Pout) that include the stray load loss were derived from an equivalent circuit analysis. A new device wasdesigned based on these theoretical equations, where by η = 70% and Pout = 451 W were achieved for a transmissiondistance of 150 mm. Finally, we attempted to wirelessly charge of a lead storage battery. The overall efficiency of thewireless charging system was maintained at 60% during battery charging.
Keywords: wireless power transfer, magnetic resonance, utility frequency, wireless charging
1. Introduction
From the time that resonance wireless power transmission(WPT) was first developed by the WiTricity project (1), therehas been a great deal of research conducted using this andother approaches (2)–(4). In addition, the direction of researchhas progressed towards the design of devices such as invert-ers and control techniques (5)–(8). Wireless charging of electricvehicles is a typical application of WPT (9) (10).
A large value for the product of the coupling coefficient(k) and the quality factor (Q) yields a high transmission ef-ficiency. Therefore, to obtain high efficiency, even when kis small (i.e., transmission distance is long), a large Q is re-quired. A high-frequency power supply is thus used; how-ever, it is necessary to consider the skin effect and proxim-ity effect to reduce the winding resistance (11). The capabil-ity of the high-frequency system is very high and a total ef-ficiency of 77% at a distance of 300 mm in free space hasbeen achieved (12) (efficiency between two coils is 95% at adistance of 300 mm (12) (13)). Wireless charging of electric ve-hicles could be achieved by embedding the transmitter coilinto paved roads or car parking areas. Omar et al. reportedsuccessful 23 kHz WPT of over 2 kW with a dc-to-dc effi-ciency of over 75% at a transmission distance of 100 mm, andalso evaluated the power loss in concrete block (14). We have
∗ Department of Applied Physics, Okayama University of Sci-ence1-1, Ridai-cho, Kita-ku, Okayama 700-0005, Japan
∗∗ National Institute of Technology, Toyama college, Hongo Cam-pus13, Hongo-machi, Toyoma city, Toyama 939-8630, Japan
∗∗∗ National Institute of Technology, Toyama College, Imizu Cam-pus1-2, Ebie-neriya, Imizu city, Toyama 933-0293, Japan
proposed the use of low frequency such as the common utilityfrequency to eliminate power loss in concrete (15). As anotheradvantage, no high-frequency power supply unit would berequired. There have been no attempts to use the commonutility frequency after the development of the WiTricity sys-tem. We are aware of only one report from the University ofCalifornia over 30 years ago, where an efficiency of 60% wasachieved over a distance of 100 mm using a 400 Hz powersupply (16).
In our previous report, we achieved a power efficiency of78% and 165 W at a distance of 100 mm (63% and 69 W at150 mm), and also confirmed that energy loss into the con-crete does not occur. Although optimization has not yet beenperformed, the 60 Hz-WPT system is expected to have higherpotential. The design has not yet been optimized, becausewe have not completed a theoretical analysis of the commonutility frequency WPT system. The efficiency-equation in thecase of high frequency does not require core loss to be con-sidered, because there is no advantage in using a magneticcore. However, a magnetic core is a necessary componentfor low frequency. In addition, although the stray load losscannot be neglected, as with an induction motor having a gapbetween the rotor and stator, an equation that contains thestray load loss has not been presented until now.
Although transmission efficiency is strongly dependent onthe shape of the magnet pole piece, a simulator has not beendeveloped to determine the optimal shape. Accurate predic-tions of the transmission efficiency and power become possi-ble if these issues are solved, and indicate that a 60 Hz-WPTsystem has high capability.
2. Experimental Procedure
The 60 Hz-WPT devices were produced with differentmagnet-pole shapes. The magnet-pole pieces were fabricated
c© 2016 The Institute of Electrical Engineers of Japan. 429

60 Hz Wireless Power Transmission System(Hiroki Ishida et al.)
from 0.35 mm thick silicon steel plates containing 3.5% sili-con. At a frequency of 60 Hz, no saturation of the pole pieceswas observed up to a flux density of 0.7 T. The coils werewound from single-strand enamel-covered copper wire witha diameter of 2 mm. Experimental results from four devices(P1-P4) are presented in this paper. Although experimentalresults for P1-P3 have already been published previously (15),they are presented here for comparison with the calculationresults. The specifications for these three devices have beenpreviously reported and are thus omitted in this paper.
The transmission efficiency and power were predictedthrough analysis of the equivalent circuit for the 60 Hz-WPTsystem. The parameters of the equivalent circuit used in thecalculation (i.e., the transformer constants) were determinedexperimentally using an actual WPT device. The transformerconstants were measured using a frequency response ana-lyzer (FRA5097, NF Co., Ltd.) and a programmable ACpower source (EC1000SA, NF Co., Ltd.). To determine themagnetic permeability, an inductor with a closed-loop corewas required, which was also fabricated in addition to thefour WPT devices.
3. GPGPU-FDTD Simulation
The finite element method (FEM) for frequency-domainanalysis and the finite difference time domain (FDTD)method for time-domain analysis are often used for electro-magnetic field simulation (17)–(20). FEM is an indirect methodfor solving Maxwell equations that employs weighted resid-uals. In contrast, FDTD is a simple method for solvingMaxwell equations by transforming them into differenceequations. The FDTD method is used for numerical analy-sis of high-frequency WPT (21)–(23). However, Maxwell equa-tions and Berenger’s perfectly matched layer (PML) can alsobe used for low-frequency analysis (24). Therefore, in thecase of a low-frequency WPT analysis, there is no theo-retical problem. We have previously reported the resultsof an electromagnetic field analysis using FDTD (15), wheretypical computing using a single-threaded program was per-formed. The calculation could not be performed using theactual size, because a large computation time is necessary forlow-frequency analysis using FDTD. Therefore, there was asignificant gap between what was ideal and practically pos-sible. We therefore attempted to create a program using theparallel distribution processing method with general-purposecomputing on graphics processing units (GPGPU) to signifi-cantly increase the processing speed.
Specifications and analysis conditions for the 60 Hz-WPTsimulation are given in Table 1. We used a GeForce GTX980 Ti (NVIDIA Co., Ltd.) as the GPU, and it was over-clocked at up to 1.418 GHz from 1.0 GHz using ASUS GPUTweak software. The number of CUDA cores for this de-vice is 2861. Therefore, the processing speed reached 8.0TFPOLS for single-precision floating point operations. UsedVisual C++ 2013 and Cuda Toolkit 6.5 as our simulator de-velopment environment.
Yee cell sizes of the two dimensional (2D) analysis planewere Δx = 1.0 mm and Δy = 1.0 mm. The time step was2.35 × 10−13 s, which meets the Courant-Friedrichs-Lewycondition (26). Berenger’s perfectly matched layer (PML) wasused for the absorption of electromagnetic waves at the end
Table 1. Specifications and analysis conditions of the60 Hz-WPT simulation
of the analysis plane.Calculations using the actual size and frequency could thus
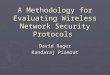
be performed. 2D magnetic field is expressed as a contourgraph of magnetic flux density (B). Figures 1(a)–(c) showsimulation results for the open state of the secondary coil forP1, P2, and P3 for a transmission distance (δ) of 100 mm.The transmitter was placed on the lower side and the receiveron the upper side in the analysis plane. Specification of thesedevices have been shown in our previous paper (15). The mainparameters used in the calculation are shown in Table 2. De-tails of these parameters will be described later in next chap-ter. The initial relative permeability of silicon steel was takento be 2000. The conductivity of the copper winding was59 × 106 S/m. The input current of the primary coil was 10 ARMS. There are no needs to specify the self-inductance andload resistance because these are estimated by the simulator.
These contour graphs were obtained at 1/4 periods(4.17 ms) after the power supply was turned on. We have con-firmed that the steady state was reached at 4.17 ms by com-parison with simulation results using the quasi-static FDTDmethod (25). As an example, the results shown in Fig. 1(a) took79 hours of computation time. The field is not high, even atthe tip of the magnet-poles, which suggests that no abnor-mally high core loss occurs. k was estimated from the ra-tio of the magnetic flux Φ1 generated in the primary coil tothe interlinkage flux Φ2, which is directed into the secondarycoil. To compare the experimental and calculation results,Fig. 2 shows the variation in k with transmission distance forthe three devices. The experimental data for P1 to P3 havealready been published in a previous paper (15). Although thepredicted k values are slightly different from the experimen-tal results, the magnitude relationship of the three devices isconsistent with the experimental results.
4. Equivalent Circuit Analysis
Condensers function to compensate leakage inductance.Three modes of connection were performed; the primary C1
430 IEEJ Journal IA, Vol.5, No.6, 2016

60 Hz Wireless Power Transmission System(Hiroki Ishida et al.)
(a)
(b)
(c)
Fig. 1. FDTD simulation results for δ = 100 mm: (a) P1, (b) P2, and (c) P3
and secondary C2 condensers were connected in parallel withthe respective coils (PP mode), C1 was connected in parallelwhile C2 was connected in series (PS mode), and C1 and C2
were both connected in series (SS mode) (27). The equivalentcircuit analysis process for the PP mode is given here, and a
similar process was applied for the other modes. The equiv-alent circuit for the PP mode is shown in Fig. 3. To derivean equation for the theoretical transmission efficiency (η), ananalysis method was constructed based on that of Tohi et al.,in which the copper loss of the WPT system is considered (28).
431 IEEJ Journal IA, Vol.5, No.6, 2016

60 Hz Wireless Power Transmission System(Hiroki Ishida et al.)
Table 2. Parameters used in the 60Hz-WPT simulation
Fig. 2. Dependence of k on δ. The theoretical curveswere estimated by FDTD simulation
Fig. 3. 60 Hz-WPT system equivalent circuit for the PPmode. r1 is the primary winding resistance, jx1 is theprimary leakage inductance, − jxC1 is the primary capac-itance, r2 is the secondary winding resistance, rs is thestray load loss resistance, jx2 is the secondary leakageinductance, − jxC2 is the secondary capacitance, rc is thecore loss resistance, jxL is the mutual inductance, and RL
is the load resistance
The resistance rs is a factor of the stray load loss connected inseries to the secondary winding resistance r2. This idea wasinspired by literature on induction motors (29)–(31).
When C2 is connected, the following equation holds for aresonance frequency ω0:
xC2 =1ω0C2
= xL + x2. · · · · · · · · · · · · · · · · · · · · · · · · · · (1)
The overall impedance for the circuit in the absence of C1
can be expressed using Eq. (2). Here, the resistance compo-nents r1, r2, rS , and rc are sufficiently small compared to thereactance components, so that they were neglected.
Z =
(xL
xL + x2
)2
RL + j
(xLx1 + x1x2 + x2xL
xL + x2
)· · · · · (2)
Z ≡ R + jX
When C1 is connected, the overall impedance Z′ is expressedas
Z′ =xC1
2R − j{XxC1 (X − xC1) + xC1R2
}R2 + (X − xC1)2
. · · · · · · · · (3)
The condition of C1, for which the imaginary part of Z′ be-comes zero, is given by
xC1 =R2
X+ X =
{(xL
xL+x2
)2RL
}2
(xL x1+x1 x2+x2 xL
xL+x2
) + (xLx1 + x1x2 + x2xL
xL + x2
).
· · · · · · · · · · · · · · · · · · · · · · · · · (4)
The relationship between VL and V2 is expressed as
VL =RL(xL + x2)
RLxL + jx2(xL + x2)V2. · · · · · · · · · · · · · · · · · · · · (5)
The relationship between V2 and VIN is given as
V2 =
RLxL2 + jxLx2 (xL + x2)
(xL + x2)2
ZVIN . · · · · · · · · · · · · · · · (6)
Thus, the relationship between VL and VIN is expressed as
VL =RL(xL + x2)
RLxL + jx2(xL + x2)
RLxL2+ jxLx2(xL+x2)(xL+x2)2
ZVIN =
VIN
ZRLxL
xL + x2.
· · · · · · · · · · · · · · · · · · · · · · · · · (7)
The relationship between I1 and IL is derived by dividing bothsides of Eq. (7).
VL
RL= IL =
VIN
ZxL
xL + x2= I1
xL
xL + x2,
I1 = αIL,xL + x2
xL≡ α, · · · · · · · · · · · · · · · · · · · · · · · (8)
where I1 and IL are in phase.The relationship between IL and I2 is given as
IL =xc2
2 − jRLxc2
RL2 + xc2
2I2. · · · · · · · · · · · · · · · · · · · · · · · · · · · · (9)
The absolute value of IL is expressed as
|IL| =√(
xc22
RL2 + xc2
2
)2
+
(RLxc2
RL2 + xc2
2
)2
|I2| = xc2√RL
2 + xc22|I2| ,
∴ |I2| =√
1 +
(RL
xc2
)2
|IL| . · · · · · · · · · · · · · · · · · · · · · · · · · · · · (10)
The phase difference between I1 and I2 is given by
IL =1α
I1 =xc2
2 − jRLxc2
RL2 + xc2
2I2,
I1 = αxc2
2 − jRLxc2
RL2 + xc2
2I2 = α
(xc2
2
RL2 + xc2
2− j
RLxc2
RL2 + xc2
2
)I2,
432 IEEJ Journal IA, Vol.5, No.6, 2016

60 Hz Wireless Power Transmission System(Hiroki Ishida et al.)
∴ cos φ =xc2√
RL2 + xc2
2. · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (11)
The relationship between I0, I1, and I2 is expressed as:
I0 = I1 − I2
|I0|2 = |I1|2 + |I2|2 − 2 |I1| |I2| cos φ
= IL2
⎡⎢⎢⎢⎢⎢⎢⎢⎣α2 + 1 +
(RL
xc2
)2
− 2α
√1 +
(RL
xc2
)2
cos φ
⎤⎥⎥⎥⎥⎥⎥⎥⎦ .· · · · · · · · · · · · · · · · · · · (12)
For the equivalent circuit shown in Fig. 3, η, with considera-tion of the copper, core, and stray load losses is given as:
η =RLIL
2
RLIL2 + rcI0
2 + r1I12 + (r2 + rs) I2
2
=RL
RL + r1α2 + (r2 + rs){1 +
(RLxc2
)2}+ rc
{α2 + 1 +
(RLxc2
)2 − 2α√
1 +(
RLxc2
)2cos φ
} .· · · · · · · · · · · · · · · · · · · · · · · · · · ·(13)
The value of RL for which the copper loss is minimized isgiven as (32)
RL = xc2
√α2
r1
r2+ 1. · · · · · · · · · · · · · · · · · · · · · · · · · · · · (14)
Thus, the maximum transmission efficiency (ηmax) with con-sideration of the copper, core, and stray load losses is givenas
ηmax =1
1 + 2r2xc2
√α2 r1
r2+ 1 +
rc
{α2
(1+
r1r2
)−2α
√α2 r1
r2+2 cosφ+2
}xc2
√α2 r1
r2+1
+rs
(α2 r1
r2+2
)xc2
√α2 r1
r2+1
.
· · · · · · · · · · · · · · · · · · · · · · · · (15)
Here, k and the quality factors for the two coils (Q1 and Q2)are defined as
Q1=ω0L1
r1, Q2=
ω0L2
r2, k=
M√L1L2
, M=xL
xL + x2L2.
· · · · · · · · · · · · · · · · · · · (16)
The following relationship is derived from Eq. (16):
α2 r1
r2=
L22
M2
r1
r2=
L1L2
M2
r1L2
r2L1=
L1L2
M2
Q2
Q1=
1k2
Q2
Q1.
· · · · · · · · · · · · · · · · · · · (17)
ηmax in Eq. (15) can thus be rewritten using k and Q:
ηmax =1
1 + 2r2xc2
√1k2
Q2
Q1+ 1 +
rc
(α2+2+ 1
k2Q2Q1−2α
√1k2
Q2Q1+2 cosφ
)xc2
√1k2
Q2Q1+1
+rs
(1
k2Q2Q1+2
)xc2
√1k2
Q2Q1+1
.
· · · · · · · · · · · · · · · · · · · · · · · · (18)
The phase difference of Eq. (11) was also adopted the condi-tion of Eq. (14) for minimum copper loss:
cos φ =xc2√
RL2 + xc2
2=
1√1k2
Q2
Q1+ 2, · · · · · · · · · · · · · (19)
Substituting Eq. (18) into Eq. (19) yields
ηmax =1
1 + 2Q2
√1k2
Q2
Q1+ 1 +
rc
(α2+2+ 1
k2Q2Q1−2α
)r2Q2
√1
k2Q2Q1+1+
rs
(1k2
Q2Q1+2
)r2Q2
√1
k2Q2Q1+1
.
· · · · · · · · · · · · · · · · · · · · · · · · (20)
Equation (21) is true under any conditions; therefore, Eq. (20)can be approximated as shown by Eq. (22) (28).
1k2
Q2
Q1> 1, · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (21)
ηmax ≈ 1
1 + 2k√
Q1Q2+
rc
(α2+2+ 1
k2Q2Q1−2α
)r2Q2
√1k2
Q2Q1
+rs
(1k2
Q2Q1+2
)r2Q2
√1k2
Q2Q1
.
· · · · · · · · · · · · · · · · · · · (22)
When Q1 and Q2 are almost the same, α ≈ 1k and Q2
Q1≈ 1
hold, so that
ηmax ≈ 1
1 + 2k√
Q1Q2+
2rc(k+k−1−1)r2Q2
+rs(2k+k−1)
r2Q2
. · · · · · (23)
To estimate the stray load loss resistance (rs) is difficult.When δ is short, the stray load loss may be acceptably neg-ligible. The magnetic field surrounding the magnetic poleexpands into free space with increasing δ; therefore, rs can-not be ignored in this case, and rs will be strongly dependenton δ. Furthermore, rs will be dependent on the shape of themagnet-pole pieces, but this has not yet been investigated.We have assumed that rs is zero to investigate the effects ofstray load loss, and then compared the experimental and cal-culated results. Figure 4(a) shows the calculation results withconsideration of the copper and core losses. Experimentaldata have already been published in previous paper (15). Here,the core loss resistance (rc) is a constant value and it can beeasily identified by employing a measurement method similarto that for a power transformer. In the region where δ is short,rs can be ignored. The discrepancy between the two resultsincreases with increasing δ. Therefore, rs was calculated asfunction of δ to compensate for the discrepancy with a best-fit polynomial curve. However, only one term of fourth ordercould be fitted, and the results are shown in Fig. 4(b). Thereis good agreement between the experimental and calculatedvalues in all regions. The following best-fitting functions ofrs were obtained for the three devices:
P1 (rectangular): rs(δ) = 15 × δ4 (10−9Ω), · · · · · · · · (24-1)
P2 (double flare): rs(δ) = 4.5 × δ4 (10−9Ω), · · · · · · · (24-2)
P3 (single flare): rs(δ) = 0.9 × δ4 (10−9Ω). · · · · · · · · (24-3)
Here, the unit for δ is millimeters. In the case of an induc-tion motor, rs is a constant value because the gap between thestator and rotor is fixed. Identification of the rs value fromtheoretical calculation is difficult, even though it is a constantvalue. Here, the stray load loss was estimated as the remain-ing power loss after subtraction of the copper, core and me-chanical losses from the total power loss (29) (30). The rs value isequivalent to division of the stray load loss by the square ofthe load current. Thus, the method used here to identify the
433 IEEJ Journal IA, Vol.5, No.6, 2016

60 Hz Wireless Power Transmission System(Hiroki Ishida et al.)
(a)
(b)
Fig. 4. Dependence of η on δ, with consideration of (a)copper and core losses, and (b) copper, core, and strayload losses
Fig. 5. Correlation between k and the δ4 coefficients
function of rs did not depart from the general method (29) (30).From comparison of the of δ4 coefficients, it can concluded
that the single flare is the optimal shape for low stray loadloss among the three prototype devices. The δ4 coefficientscould be determined from the shape of magnet-pole piece,but they cannot be estimated using the simulator. Figure 5shows the correlation between the k values and the δ4 coeffi-cients (data for P4, which will be described later, are includedin this graph). A scale law was identified that logarithmicallydecreases with k for any δ. It was thus possible to estimatethe coefficients of δ4 from k, which are estimated from theFDTD simulator, using this scale law.
The transmission power (Pout) at maximum efficiency in-dicated in Eq. (25) is given as
Pout = RLIL2 =
VIN2
Z′′ηmax, · · · · · · · · · · · · · · · · · · · · · · (25)
Fig. 6. Dependence of Pout on δ
where VIN is 100 or 200 V in Japan. Z′′ is the overallimpedance of the equivalent circuit in the state with con-densers connected:
Z′′ =xC1
2R
R2 + (X − xC1)2, · · · · · · · · · · · · · · · · · · · · · · · · · (26)
where
R ≡(
xL
xL + x2
)2
RL, X ≡ xLx1 + x1x2 + x2xL
xL + x2.
Here, the RL value was entered for the optimal conditionsshown in Eq. (14).
RL = xc2
√α2
r1
r2+ 1 ≈ xc2
√1k2+ 1. · · · · · · · · · · · · · · (27)
Furthermore, xc1 and xc2 fulfilled the respective resonanceconditions of Eqs. (4) and (1). The difference between the ex-perimental and the calculated results is shown in Fig. 6. Ex-perimental data have already been previously published (15).There is good agreement in the long δ region. However, forthe short distance region, there is poor agreement with theexperimental results. The leakage inductances x1 and x2 be-come small in the short δ region, so that the relative contri-bution of the winding resistance cannot be neglected. Havingignored the effect of the winding resistance in Eq. (26), Z′′ isestimated to be larger than the true value in the short δ region.To mitigate the mismatch, the equivalent circuit containingresistance components should be solved precisely; however,this has not yet been completed. The conclusion can be de-rived from Eq. (25), where the simple solution to obtain largePout is to apply a large input voltage, because Pout is propor-tional to the square of the input voltage.
5. Design and Fabrication
Our purpose is to achieve wireless charging for a smallelectric vehicle (EV). The 60 Hz-WPT system is designedto allow wireless charging at home without the need for ahigh-frequency power supply. We have developed a smallEV equipped with the 60 Hz-WPT, and photographs of theprototype are shown Fig. 7. The small EV has a 48 V elec-trical system by the in-series connection of four 12 V leadstorage battery packs. Table 3 shows the requirements of the60 Hz-WPT charging system. The device was designed inan attempt to satisfy these requirements and evaluation wasconducted using equivalent circuit analysis (PP and SS mode)
434 IEEJ Journal IA, Vol.5, No.6, 2016

60 Hz Wireless Power Transmission System(Hiroki Ishida et al.)
Fig. 7. Small EV equipped with the 60 Hz-WPT charg-ing system. (a) Back view, and (b) internal components
Table 3. Requirements of the 60 Hz-WPT system
(a) (b)
Fig. 8. (a) Front and (b) side views of the P4 prototype
and an FDTD simulator.Figure 8 shows a photograph of the P4 prototype, and the
specifications for P4 are given in Table 4. P4 was designedto be 2 kg lighter than P3, and an efficiency of 80% was the-oretically predicted with δ = 100 mm. Here, rc could not beidentified by calculation; therefore, the values measured forP3 were used.
The size of the device was determined based on the de-sign guidelines for a low-voltage transformer for convertedto resistance at 75◦C. According to the guidelines, the cross-sectional area required for a single-strand copper wire wasover 3.0 mm2. Therefore, a polyvinyl-formal enamel-coatedcopper wire with a diameter of 2.0 mm was selected. In a typ-ical low-voltage transformer, the sectional area of the mag-netic core is determined assuming a magnetic field of up toapproximately B = 1.5 T. However, a larger cross-sectionalarea was required to obtain a large Q. To obtain Q > 60,a cross-sectional area of at least 28 cm2 was necessary. A
Table 4. Specifications for the P4 prototype
magnetic pole area of 132 mm2 was necessary to obtain k =0.22 at δ = 10 cm.
In the experiment, a sliding resistance (DW series, Yam-abishi Electric Co., Ltd.) was used as an experimental load.For example, the inductance included in the winding of 6.3Ωwas 0.5 mH, which is negligibly small compared to the self-inductance of the primary and secondary coils. The resis-tance change due to temperature increase was adjusted man-ually to keep constant. The experimental results, where theefficiency and power output were 79% and 190 W, confirmthat the P4 prototype exhibits the designed performance. Fig-ures 9(a) and (b) show the η and Pout characteristics for theP4 prototype, and the results for P3 are also presented forcomparison. At δ = 100 mm, the difference between the twodevices appears small; however, the difference increased withδ. At 150 mm, ηwas improved by 7%, and Pout was increasedby 44 W. However, the output power of the 60 Hz-WPT sys-tem would be too small in consideration of applications suchas small electric vehicles. For example, the high-frequencyWPT system for the Nissan Leaf II has over 3 kW outputat a transmission distance of 150 mm. Although the exactsize and weight are not published, the latter system has over-whelming performance compared to the 60 Hz-WPT system.If applied to a small electric vehicle, the 60 Hz-WPT systemwould require 500 W or more (33).
We considered that high power can be obtained even at lowinput voltage by lowering the overall impedance. Thus, asimple solution is to select the SS mode. Figure 10(a) showsa comparison of the output power with input voltage for thethree modes (PP, PS, and SS modes). For the SS mode,the output power reached 854 W at 100 V. We did not at-tempt to increase the input voltage over 100 V, because thiswould exceed the rated current of the condenser. Figure 10(b)shows a comparison of the transmission efficiency for the
435 IEEJ Journal IA, Vol.5, No.6, 2016

60 Hz Wireless Power Transmission System(Hiroki Ishida et al.)
(a)
(b)
Fig. 9. Characteristics of the P4 prototype. (a) Depen-dence of η on δ, and (b) of Pout on δ. Results for the P3prototype are also shown for comparison
(a)
(b)
Fig. 10. Comparison of the transmission performancefor the three modes. (a) Pout, and (b) η as a function ofthe input voltage
three modes. For the SS mode, the maximum efficiency of70% was maintained until 451 W. The weight of 10 kg wouldbe too heavy for small electric vehicle. Therefore, further
Fig. 11. 60 Hz wireless charging circuits for charginglead storage batteries
weight reduction is required by optimization of the design.
6. Wireless Charging System
Wireless charging of lead storage batteries was performedin anticipation of wireless charging for a small EV. Fig-ure 11 shows the wireless charging circuits. The experimentwas performed using the P4 device with a transmission dis-tance of 15 cm. The capacitances of the condenser for res-onance (C1, C2) were given by the following equation fromthe equivalent circuit analysis:
C1 =1
ω0(xL + x1), C2 =
1ω0(xL + x2)
. · · · · · · · · · (28)
60 μF film condensers were selected according to Eq. (28).Two lead storage batteries (Type: 44B19R, 12 V, 34 Ah) con-nected in series were used as the load. The internal resistancein a lead storage battery changes during charging, and it alsovaries depending on the charge time. The amount of changein the battery used for the experiment was between 20 and35 mΩ.
A diode bridge (GBP2504) with a large internal resistancewas selected for the rectifier. The internal resistance was180 mΩ, which is the average dynamic resistance in the op-erating voltage region of VF from 0.0 V to 0.93 V. The totalload resistance was approximately 400 mΩ when the line re-sistance of 10 mΩ was considered. Therefore, the variableratio of the load resistance caused by the internal resistanceof the battery would be only 1.8%. Therefore, control to trackthe load variation was not necessary (as shown in Fig. 7(b)).
The output voltage of wireless charging system was 31 Vunder 50 V of input voltage, which is reasonable because thetypical charging voltage per battery pack is 15.5 V. The com-mon utility voltage in Japan is 100 V; therefore, the inputvoltage is just 100 V in the case of four battery packs con-nected in series. Our small electric vehicle has been devel-oped with four battery packs connected in series.
Figure 12 shows a time course of the voltage and currentduring battery charging. The WPT system in the SS modehas immittance conversion characteristics (28). Common util-ity power acts roughly as a constant voltage supply, so thatthe WPT system in the SS mode acts almost as a constantcurrent supply. Therefore, the charging current continues toflow, even if a charging voltage of 31 V is reached, whichtakes approximately 2 h.
Figure 13 shows the time course of the transmission ef-ficiency during charging. Here, ηwpt is Pwpt/Pin (× 100%),which is the efficiency of the WPT system. ηtotal is Pout/Pin
(× 100%), which is the efficiency including the power lossin the rectification circuit. Although the circuit was uncon-trolled during charging, ηtotal was kept at 60%, which is
436 IEEJ Journal IA, Vol.5, No.6, 2016

60 Hz Wireless Power Transmission System(Hiroki Ishida et al.)
Fig. 12. Time course of battery voltage and current dur-ing charging
Fig. 13. Time course of efficiency during battery charg-ing
reasonably high. In addition, ηwpt is kept at 66%.The optimum load resistance for the SS mode was derived
from equivalent circuit analysis, as follows:
RLmax = kr2
√Q1Q2, · · · · · · · · · · · · · · · · · · · · · · · · · · · · (29)
which is 6.3Ω for the P4 device with a transmission distanceof 15 cm. The transmission efficiency under optimum load re-sistance was determined using the same formula as Eq. (23).The experimental results also confirmed that the maximumefficiency (70%) is obtained when RL = 6.3Ω. We considerthat the 4% decrease is caused by the difference between theactual load resistance (0.4Ω) and the optimum load resis-tance. The following conclusions were made from calcula-tion of Eq. (13): the copper loss in the secondary coil willincrease when the load resistance deviates from the optimumvalue, while the percentages of other loss elements are notsignificantly changed. An increase in the current of the sec-ondary coil was also confirmed in the experiment. The rateof increase in copper loss from the secondary coil was 4%when connected to the batteries, as shown in Fig. 11.
7. Conclusion
The accelerated FDTD simulation using GPGPU was con-firmed to be useful for performance design. η and Pout can beestimated according to Eqs. (23) and (25), respectively. How-ever, the cross-sectional area and number of coil turns werefixed when determining the magnet pole shape; therefore, anew simulator that integrates the equivalent circuit analysisand FDTD simulation is required to obtain maximum trans-mission efficiency.
The P4 prototype achieved an efficiency of 70% and an out-put of 451 W at a distance of 150 mm, which constitutes a 7%
improvement in η and an increase of 382 W for Pout over ourprevious report. Even with a lead storage battery as a load,the decrease from the maximum efficiency is only 4%.
The device proposed here is very simple and easily fab-ricated with only silicon steel plates, single-strand copperwire, and phase-advanced condensers. In addition, this sys-tem could be directly connected to a wall socket. The man-ufacturing cost of the P4 prototype was approximately 600USD (silicon steel plates: 100 USD, copper wire: 100 USD,and condensers: 400 USD). Therefore we consider that the60 Hz-WPT is suitable for wireless charging of small electricvehicles.
AcknowledgmentThis research is partially supported by the Japan Science
and Technology Agency A-STEP, (Feasibility studies stageNo.AS262Z00347L), and JSPS KAKENHI Grant Number15K13934.
References
( 1 ) A. Kurs, A. Karalis, R. Moffatt, J.D. Joannopoulos, P. Fisher, and M.Soljacic: “Wireless power transfer via strongly coupled magnetic reso-nances”, Science, Vol.317, pp.83–86 (2007)
( 2 ) B.L. Cannon, J.F. Hoburg, D.D. Stancil, and S.C. Goldstein: “Magnetic res-onant coupling as a potential means for wireless power transfer to multiplesmall receivers”, IEEE Trans. Power Electron., Vol.24, pp.1819–1826 (2009)
( 3 ) A. Kurs, R. Moffatt, and M. Soljacic: “Simultaneous mid-range power trans-fer to multiple devices”, Appl. Phys. Lett., Vol.96, pp.044102 (1)–(3) (2010)
( 4 ) A. Sample, D. Meyer, and J. Smith: “Analysis, experimental results, andrange adaptation of magnetically coupled resonators for wireless power trans-fer”, IEEE Trans. Ind. Electron., Vol.58, pp.544–554 (2011)
( 5 ) W. Fu, B. Zhang, and D. Qiu: “Study on frequency tracking wireless powertransfer system by resonant coupling”, in Proc. IEEE International PowerElectronics and Motion Control Conf., pp.2658–2663 (2009)
( 6 ) K. Kusaka and J. Itoh: “Reduction of reflected power loss in an AC-DC con-verter for wireless power transfer systems”, IEEJ Journal of Industry Appli-cations, Vol.2, pp.195–203 (2013)
( 7 ) Z.N. Low, R. Chinga, R. Tseng, and I. Lin: “Design and test of a high powerhigh efficiency loosely coupled planar wireless power transfer system”, IEEETrans. Ind. Electron., Vol.56, pp.1801–1812 (2009)
( 8 ) B. Wang, A.P. Hu, and D. Budgett: “Maintaining middle zero voltage switch-ing operation of parallelparallel tuned wireless power transfer system underbifurcation”, IET Power Electronics, Vol.7, pp.78–84 (2014)
( 9 ) F. Musavi and W. Eberle: “Overview of wireless power transfer technologiesfor electric vehicle battery charging”, IET Power Electronics, Vol.7, pp.60–66(2014)
(10) V. Boscaino, F. Pellitteri, L. Rosa, and G. Capponi: “Wireless battery charg-ers for portable applications: design and test of a high-efficiency power re-ceiver”, IET Power Electronics, Vol.6, pp.20–29 (2013)
(11) A.K. Ramrakhyani, S. Mirabbasi, and M. Chiao: “Design and optimizationof resonance-based efficient wireless power delivery systems for biomedicalimplants”, IEEE Trans. Biomed. Circuits Syst., Vol.5, pp.48–63 (2011)
(12) N.B. Carvalho, et al.: “Wireless power transmission: R&D activities withinEurope”, IEEE Trans. Microw. Theory Techn., Vol.62, pp.1031–1045 (2014)
(13) S.H. Lee and R.D. Lorenz: “Development and validation of model for 95%-efficiency 220-W wireless power transfer over a 30-cm air gap”, IEEE Trans.Ind. Appl., Vol.47, pp.2495–2504 (2011)
(14) O.C. Omar, J.M. Miller, S.L. Campbell, C. Coomer, C.P. White, and L.E.Seiber: “A novel wireless power transfer for in-motion EV/PHEV charg-ing”, in Proc. IEEE Applied Power Electronics Conference and Exposition,pp.3073–3080 (2013)
(15) H. Ishida and H. Furukawa: “Wireless power transmission through concreteusing circuits resonating at utility frequency of 60-Hz”, IEEE Trans. PowerElectron., Vol.30, pp.1220–1229 (2015)
(16) C.E. Zell and J.G. Bolger: “Development of an engineering prototype of aroadway powered electric transit vehicle system”, in Proc. IEEE Veh. Tech-nol. Conf., Vol.32, pp.435–438 (1982)
(17) A.F. Goldberg, J.G. Kassakian, and M.F. Schlecht: “Finite-element analy-sis of copper loss in 1–10 MHz transformers”, IEEE Trans. Power Electron.,Vol.4, pp.157–167 (1989)
437 IEEJ Journal IA, Vol.5, No.6, 2016

60 Hz Wireless Power Transmission System(Hiroki Ishida et al.)
(18 ) J.F. Watson and D.G. Dorrell: “The use of finite element methods to im-prove techniques for the early detection of faults in 3-phase induction mo-tors”, IEEE Trans. Energy Convers., Vol.14, pp.655–660 (1999)
(19) C. Sijoy and S. Chaturvedi: “Calculation of accurate resistance and induc-tance for complex magnetic coils using the finite-difference time-domaintechnique for electromagnetics”, IEEE Trans. Plasma Sci., Vol.36, pp.70–79(2008)
(20) R.A. Dalke, C.L. Holloway, P. McKenna, M. Johansson, and A.S. Ali: “Ef-fects of reinforced concrete structures on RF communications”, IEEE Trans.Electromagn. Compat., Vol.42, pp.486–496 (2000)
(21) X. Yu, S. Sandhu, S. Beiker, R. Sassoon, and S. Fan: “Wireless energy trans-fer with the presence of metallic planes”, Appl. Phys. Lett., Vol.99, pp.214102(1)–(3) (2011)
(22) K. Shimamura and K. Komurasaki: “Wireless power transmission into metal-lic tube using axial slit for infrastructure diagnostics”, Wireless Engineeringand Technology, Vol.6, pp.50–60 (2015)
(23) A. Christ, M.G. Douglas, J.M. Roman, E.B. Cooper, A.P. Sample, B.H.Waters, J.R. Smith, and N. Kuster: “Evaluation of wireless resonant powertransfer systems with human electromagnetic exposure limits”, IEEE Trans.Electromagnetic Compatibility, Vol.55, pp.265–274 (2013)
(24) J.P. Berenger: “A perfectly matched layer for the absorption of electromag-netic waves”, J. Comput. Physics, Vol.114, pp.185–200 (1994)
(25) A. Hirata, Y. Takano, and T. Nagai: “Quasi-static FDTD method for dosime-try in human due to contact current”, IEICE Transactions on ElectronicsVol.E93-C, pp.60–65 (2010)
(26) R. Courant, K. Friedrichs, and H. Lewy: “On the partial difference equa-tions of mathematical physics”, IBM Journal of Research and Development,Vol.11, pp.215–234 (1967)
(27) X. Del Toro Garcıa, J. Vazquez, and P. Roncero-Sanchez: “Design imple-mentation issues and performance of an inductive power transfer system forelectric vehicle chargers with seriesseries compensation”, IET Power Elec-tronics, Vol.8, pp.1920–1930 (2015)
(28) T. Tohi, Y. Kaneko, and S. Abe: “Maximum efficiency of contactless powertransfer systems using k and Q”, IEEJ Trans. Industry Applications, Vol.132,pp.123–124 (2012) (in Japanese)
(29) E. Levi and A. Cavagnino: “Impact of stray load losses on vector control ac-curacy in current-fed induction motor drives”, IEEE Trans. Energy Convers.Vol.21, pp.442–450 (2006)
(30) A. Boglietti, L. Ferraris, and M. Lazzari: “Induction motor equivalent circuitincluding the stray load losses in the machine balance”, IEEE Trans. EnergyConvers., Vol.23, pp.796–803 (2008)
(31) K. Yamazaki, A. Suzuki, M. Ohto, and T. Takakura: “Composition of equiv-alent circuit for induction motors considering stray load loss and harmonictorques using electromagnetic field analysis”, IEEJ Trans. Industry Applica-tions, Vol.130, pp.1030–1038 (2010) (in Japanese)
(32) T. Imura: “Study on maximum air-gap and efficiency of magnetic resonantcoupling for wireless power transfer using equivalent circuit”, in Proc. IEEEInternational Symposium on Industrial Electronics, pp.3664–3669 (2010)
(33) T.U. Karl: “Estimating the technology frontier for personal electric vehicles”,Transportation Research Part C, Vol.13, pp.448–462 (2005)
(34) S.G. Lee, H. Hoang, Y.H. Choi, and F. Bien: “Efficiency improvement formagnetic resonance based wireless power transfer with axial-misalignment”,IET Electronics Letters, Vol.48, pp.339–340 (2012)
(35) Z. Yang, D. Xin, L. Weiyi, and S. Yue: “Robust design optimization for in-ductive power transfer systems from topology collection based on an evolu-tionary multi-objective algorithm”, IET Power Electronics, Vol.8, pp.1767–1776 (2015)
Hiroki Ishida (Member) received the Ph.D. degree in electrical en-gineering from Nagaoka University of Technology,Niigata, Japan, in 2004. He joined the National In-stitute of Technology, Toyama College, in 2005, andhas been an associate professor there since 2010. In2015, he moved to Okayama University of Science asan associate professor in the Department of AppliedPhysics. His current research interests include wire-less power transmissions. He is a member of the In-stitute of Electrical Engineers of Japan and the Japan
Society of Applied Physics.
Hiroto Furukawa (Member) received the B.S. degree and M.S. de-gree in electrical engineering from Tokyo Denki Uni-versity, Tokyo, Japan, in 1987 and 1989, respec-tively. He joined the National Institute of Technology,Toyama College, in 1991, and has been an associateprofessor there since 2003. He has been engaged inpropagation characteristics of microwave in concreteblocks and its application for non-destructive diag-nostics. He is a member of the Institute of ElectricalEngineers of Japan and the Institute of Electronics,
Information and Communication Engineers.
Tomoaki Kyoden (Non-member) received the Ph.D. degree in me-chanical Engineering from Kanazawa University,Ishikawa, Japan, in 2014. He joined the National In-stitute of Technology, Toyama College, in 2010 andhas been a lecturer there since 2016. His current re-serch interests include focus on energy conversionhigh-efficiency technology and utilization of renew-able energy. He is a member of the Japan Society ofApplied Physics.
438 IEEJ Journal IA, Vol.5, No.6, 2016