Embed Size (px)
DESCRIPTION
Design of engineering systems by transforming knowledge between fields. Solving Engineering Design Problems. Transformations make possible to seek for solution for design problem in engineering domain D a in some other engineering domain D b related to D a through graph representations. - PowerPoint PPT Presentation
Citation preview

Design of engineering systems by transforming
knowledge between fields.
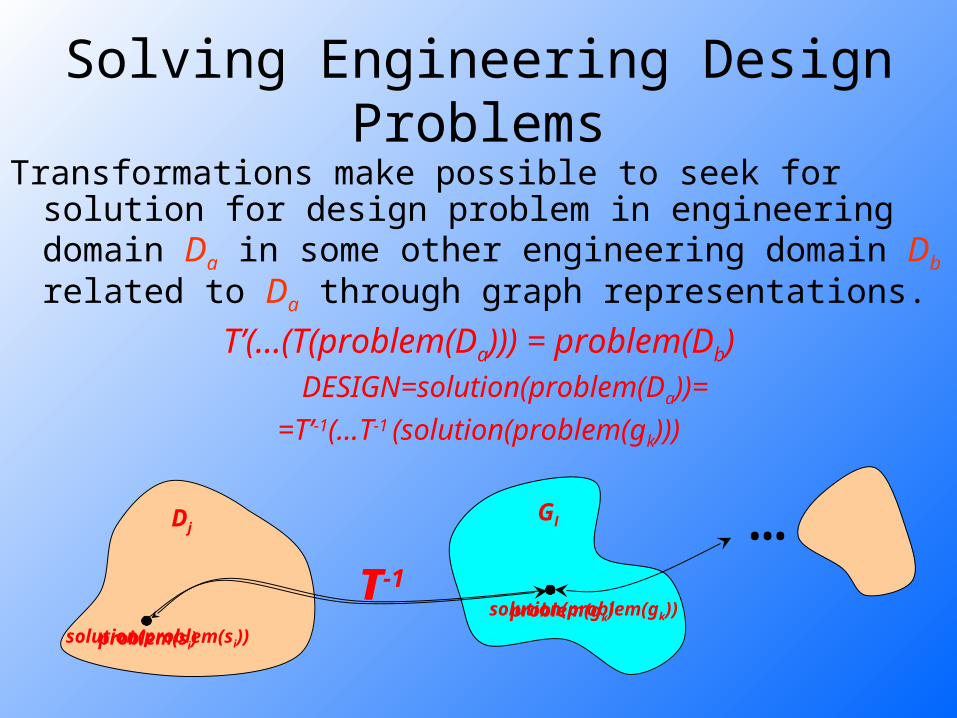
Solving Engineering Design Problems
Transformations make possible to seek for solution for design problem in engineering domain Da in some other engineering domain Db related to Da through graph representations.
T’(…(T(problem(Da))) = problem(Db) DESIGN=solution(problem(Da))=
=T’-1(…T-1 (solution(problem(gk)))
Gl
solution(problem(gk))
Dj
T-1problem(si)solution(problem(si))
problem(gk)T
…

Design methods We distinguish two design methods for performing
design through transformations: one employing common graph representation and other employing the dual representations.
Gl
kg
Da
kaT-1 kb
D
bT’
G1
gi
G2
gj
Da
si Tsj
D
bT’D

Common Representation Design Technique
Gl
kg
Da
ka
T-1 kb
Db
T’2
3
6
5
41
C
DB
A

Common Representation Design Technique
2
3
6
5
41
C
DB
A

Dual Representation Design Technique
G1
gi
G2
gj
Da
si Tsj
Db
T’D

Dual Representation Design Technique
Examples
Common Design Technique:
Mechanical Rectifier
Clipping Mechanism
Alternative Rectifier
Dual Design Technique:
Beam Rectifier
Steering Wheel

Common Representation Design Technique
Mechanical Rectifier

The given problem: design a mechanical rectifier
Input angularvelocity in
Output angular velocity out
Requirement: out=|in|
Mechanical system
to be found

Transforming the problem to the terminology of the graph representation
Input potential difference
source in
Potential Graph
to be found
Requirement: out=|in|
Output potential difference
out

Transforming the problem to the other engineering domain - electronics

The solution existing in electronics – Bridge rectifier circuit

2
3
6
5
41
B
A C
D
Building the graph representation of the solution
B
A
C D

2
3
6
5
41
C
DB
A
B
A
C D
Building the mechanical system with the same graph representation
The mechanical system will be constructed graduallyby augmenting one element at a time in accordance tothe edges of the graph

2
3
6
5
41
B
A
C D
C
DB
A
Potential difference source edge AB – edge where the potential difference is given
1A
B
2
3
6
5
41
B
A
C D
A
B
C
DB
A
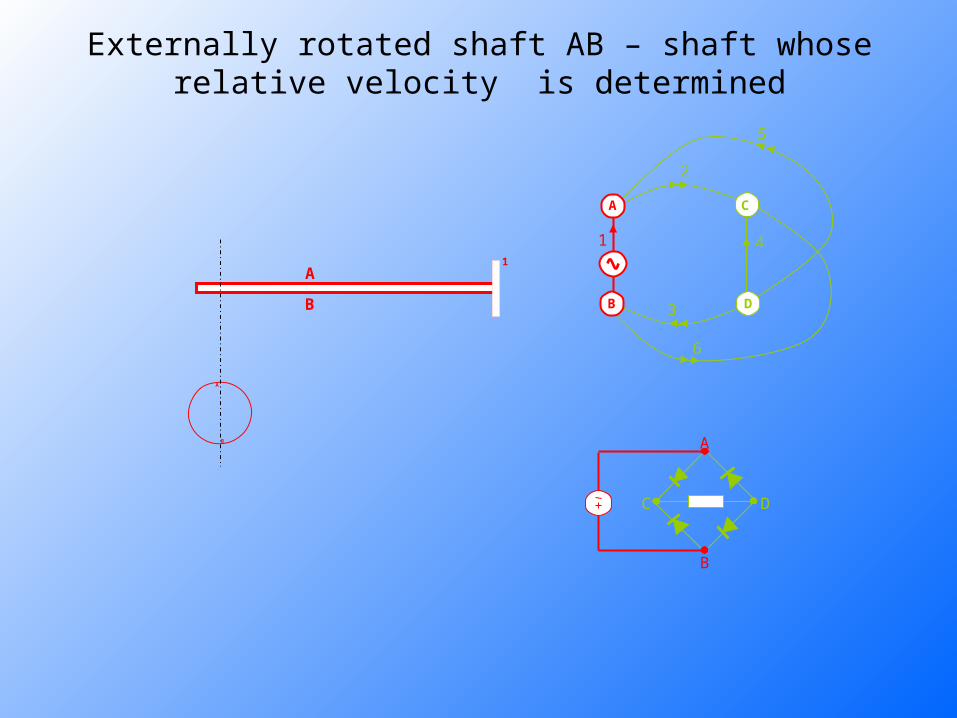
Externally rotated shaft AB – shaft whose relative velocity is determined
1A
B
2
3
6
5
41
B
A
C D
A
B
C
DB
A
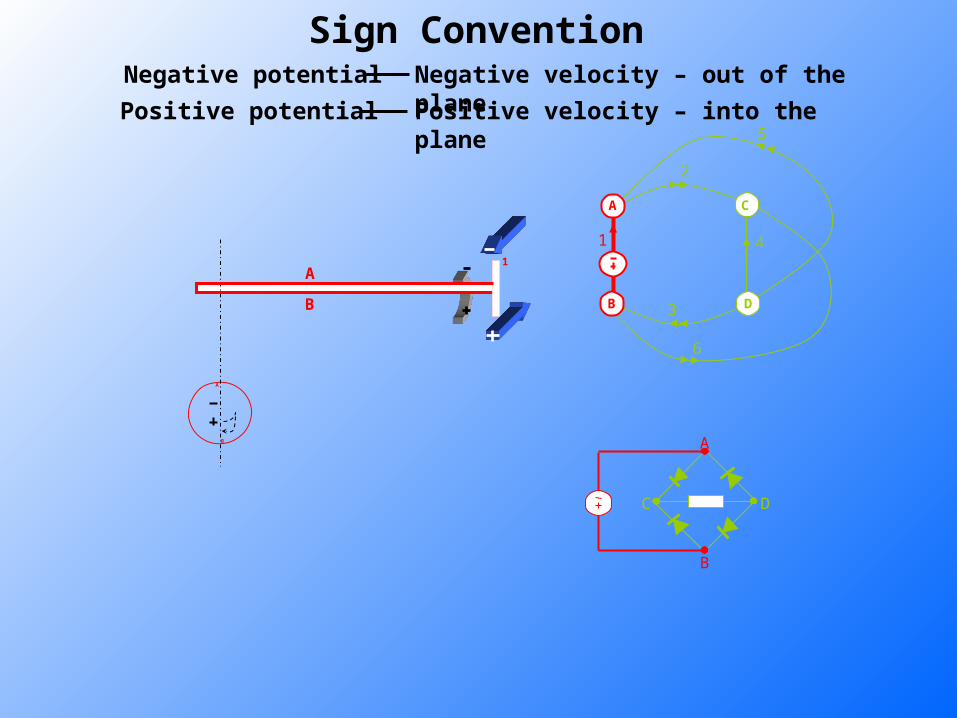
Sign ConventionNegative potential Negative velocity – out of the plane
Positive potential Positive velocity – into the plane

1A
B
2
3
6
5
41
B
A
C D
A
B
C
DB
A
Unidirectional edge 2 – edge forcing the potential of A be higher or equal to the potential of C
C AVCVA

1
2 A
B
2
3
6
5
41
B
A
C D
C
A
B
C
C
DB
A
C
CA
C
VC
VA
VC
Overrunning clutch 2 – kinematical pair forcing the velocity of A be higher or equal to the
velocity of C
VC<0VA=VC
VC 0VA=0 VCVA
A
C

1
2 A
B
C
A
B
C
2
3
6
5
41
B
A
C D
C
DB
A
C
VC
Unidirectional edge 3 – edge forcing the potential of D be higher or equal to the potential of B

1
2
3
A
B
C
D
A
B
C
D
2
3
6
5
41
B
A
C D
C
DB
A
C
D
DB
VBVD
VC
VD
VB
VD
Overrunning clutch 3 – kinematical pair forcing the velocity of D be higher or equal to the
velocity of B
1
2
3
A
B
C
D
A
B
2
3
6
5
41
B
A
C D
C
DB
A
C
D
VC
VD
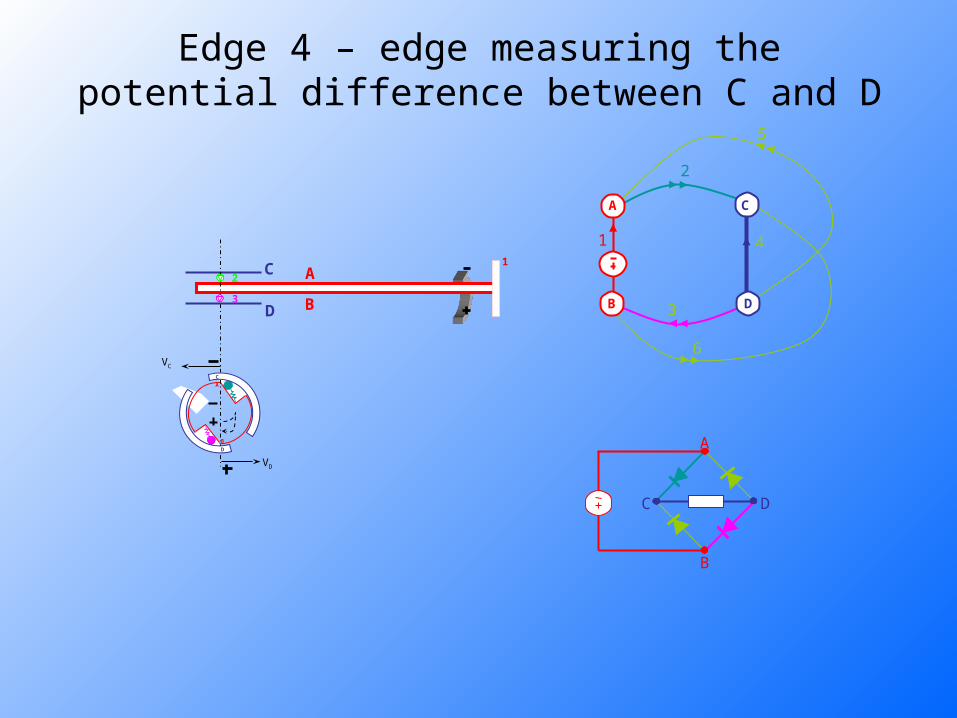
Edge 4 – edge measuring the potential difference between C and D

4 1
2
3
A
B
C
D
A
B
Output
C
D
2
3
6
5
41
B
A
C D
C
DB
A
Shaft 4 – shaft whose velocity is equal the relative velocity between joints C and D
4 1
2
3
A
B
2
3
6
5
41
B
A
C D
C
D
A
B
C
D
C
DB
A
AVC
VAC
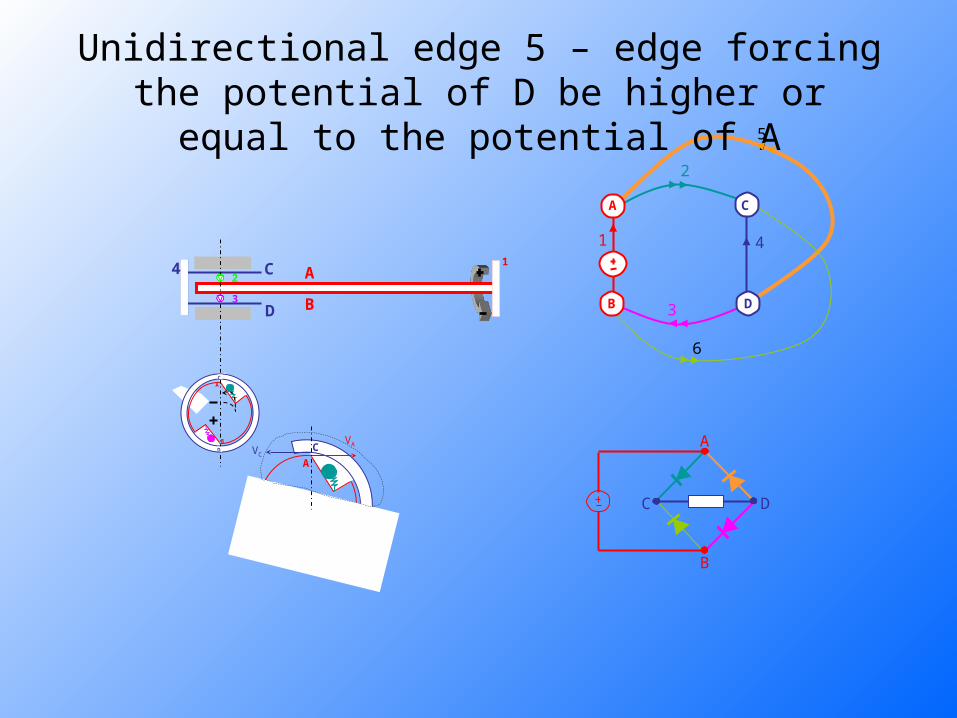
Unidirectional edge 5 – edge forcing the potential of D be higher or equal to the potential of A

4 1
2
3
A
B
D= - C
2
3
6
5
41
B
A
C D
C
D
A
B B
A
C
D
D
5
C
DB
A
AVC
VAC
VDD
Overrunning clutch 5 – kinematical pair forcing the velocity of D be higher or equal to the
velocity of A

4 1
2
3
A
B
D
2
3
6
5
41
B
A
C D
C
D
A
B B
A
C
D
D
5
C
DB
A
Unidirectional edge 6 – edge forcing the potential of B be higher or equal to the potential of C

4
6
1
2
3
A
B
D
C
2
3
6
5
41
B
A
C D
C
D
A
B B
A
Output
C
D
D
C
5
C
DB
A
Overrunning clutch 6 – kinematical pair forcing the velocity of B be higher or equal to the
velocity of C

2
3
6
5
41
C
DB
A
The prototype of mechanical rectifier was built at the laboratory of kinematical systems in Tel-Aviv university
and successfully tested.

1
A
B
C
D
4
A
B
A
C
D
A
B
CD
B
A
D
C
3 6
52
InputOutput
Input
Output
6
5
3
4
2
1
C
D
0
Comparing the behavior of the original electronic circuit and the mechanical rectifier: forward operation mode
- positive potential/velocity - negative potential/velocity

1
A
B
C
D
4
A
B
A
C
D
A
B
CD
B
A
D
C
3 6
52
InputOutput
Input
Output
6
5
3
4
2
1
C
D
0
Comparing the behavior of the original electronic circuit and the mechanical rectifier: inverse operation mode
- positive potential/velocity - negative potential/velocity

Comparing the behavior of the original electronic circuit and the mechanical rectifier: illegal operation mode
- positive potential/velocity - negative potential/velocity
1
A
B
C
D
4
B
A
C
D
A
B
CD
B
A
D
C
3 6
52
Input
Output
6
5
3
4
2
C
D

Common Representation Design Technique
2
3
6
5
41
C
DB
A

Developing a new design of a Steering Wheel Mechanism

Electronic circuits
Frames
This general framework opens wider possibilities for employing the approach of transforming knowledge for design. Here we will show an example of developing a
new steering wheel mechanism
FGRFlow Graph
Representation
Dynamicalsystem
Electroniccircuit
RGR Resistance Graph
Representation
Electronic transistor
New concept of a power steering
mechanism

The model of the new concept for the steering wheel mechanism was built and successfully tested in the mechanical lab
of Tel-Aviv University. The properties exhibited by the device do not exist in any
of the known devices of such type.
Additional design cases have been solved by means of the approach. Some of them
have systematically yielded known devices that only recently have been patented.

Dual Representation Design Technique
Case Study
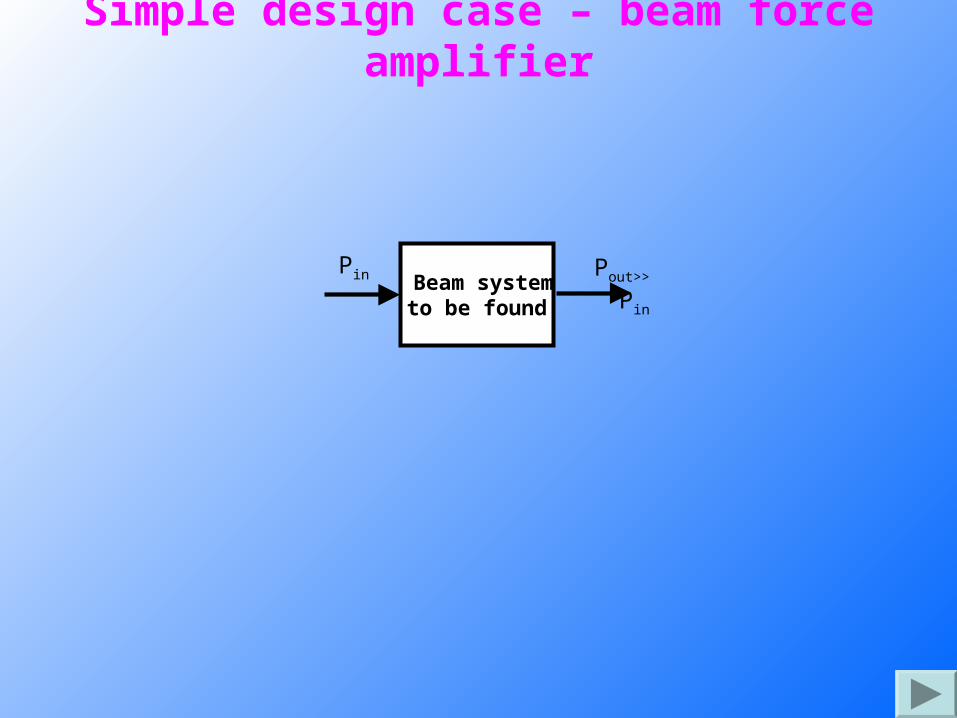
Beam system to be found
Pin Pout>> Pin
Simple design case – beam force amplifier

Meta-levelMeta-level
EngineeringDomain
I
EngineeringDomain
II
GraphRepresentation
I
GraphRepresentation
II
Gear systemto be found
in out>>in Beam system to be found
Pin Pout>> Pin
Simple design case – beam force amplifier
Transforming the original problem (beam) to the
secondary domain (gear trains)

Meta-levelMeta-level
EngineeringDomain
I
EngineeringDomain
II
GraphRepresentation
I
GraphRepresentation
II
Gear systemto be found
in out>>in Beam system to be found
Pin Pout>> Pin
Drilling machine
Other gear systems
Gearbox
Electrical screwdriver transmission
out
A
C
B
G G
A
C
B
53
1
2 4
in
Existing solutions in the domain of gear trainsChoosing one of the solutions
Meta-levelMeta-level
EngineeringDomain
I
GraphRepresentation
I
GraphRepresentation
II
System to be found
Pin Pout>> Pin
A AB B
GG CCG
0
432 51
out
A
C
B
G G
A
C
B
53
1
2 4
in
I II IV
0
IIIG CC
A BB AG
out
A
C
B
G G
A
C
B
53
1
2 4
in
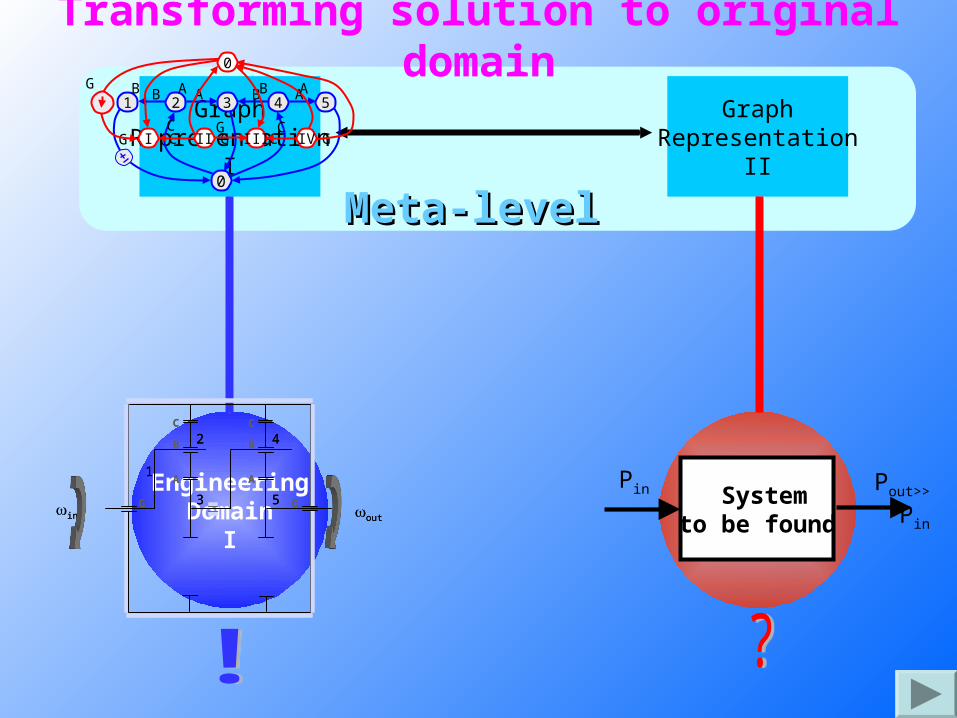
Transforming solution to original domain
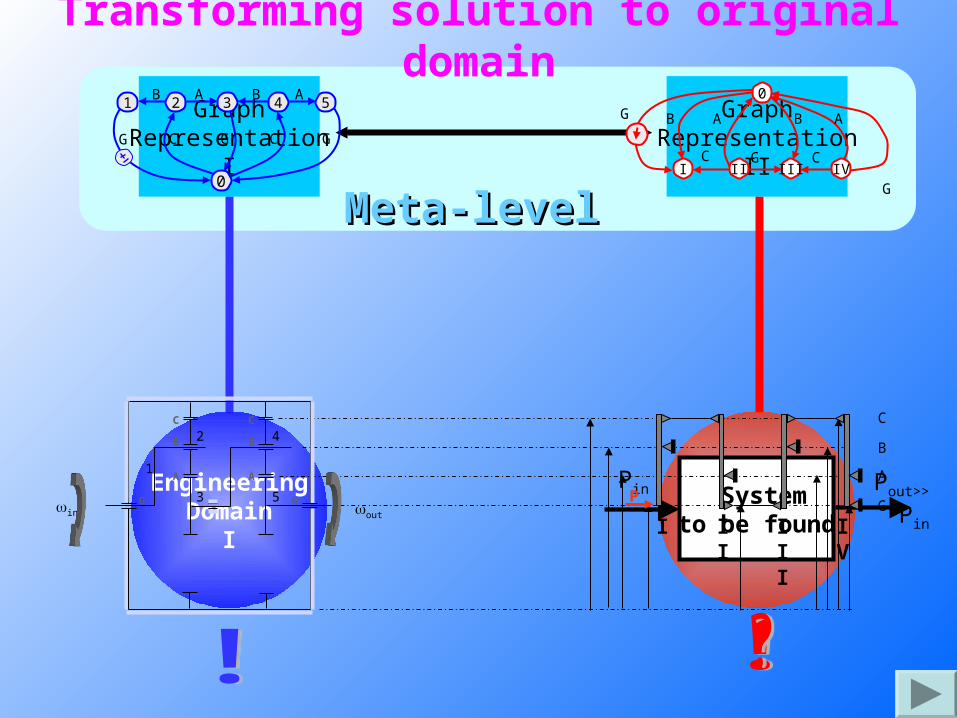
Meta-levelMeta-level
EngineeringDomain
I
GraphRepresentation
I
GraphRepresentation
II
System to be found
Pin Pout>> Pin
I II IV
0
IIIG CC
A BB A
G
G
I III IVII
P
C
B
A
G
A AB B
GG CCG
0
432 51
out
A
C
B
G G
A
C
B
53
1
2 4
in
Transforming solution to original domain

DESIGN A BEAM FORCE AMPLIFIER
CC CC

Additional Design ExamplesDesign of clipping mechanism

Requirement: lout= lin - lc
Output coordinate mustn’t exceed a given limit
Input is any coordinate
Systematic design of clipping mechanism
Kinematicalsystem
to be found

Requirement: out = inc
Systematic design of clipping mechanism
Input potential difference
source in
Potential Graph
to be found
Output potential difference
out

Systematic design of clipping mechanism
VVin
Electronic circuit
to be found
Requirement: Vout = Vin - Vc

V
A
0
B
C
The solution existing in electronics

A
B V
0 C
Systematic design of clipping mechanism
V
A
0
B
C

A
0
A
V
A
0
B
C
0
Step 1 Step 4
Systematic design of clipping mechanism

A
0
A
BB
V
A
0
B
C
0
Systematic design of clipping mechanism

A
0
A
BB
CV
A
0
B
C
0 C
Systematic design of clipping mechanism

A
0
A
BB
CV
A
0
B
C
0 C
Systematic design of clipping mechanism

A
0
A
BB
CV
V
A
0
B
C
0 C
Systematic design of clipping mechanism
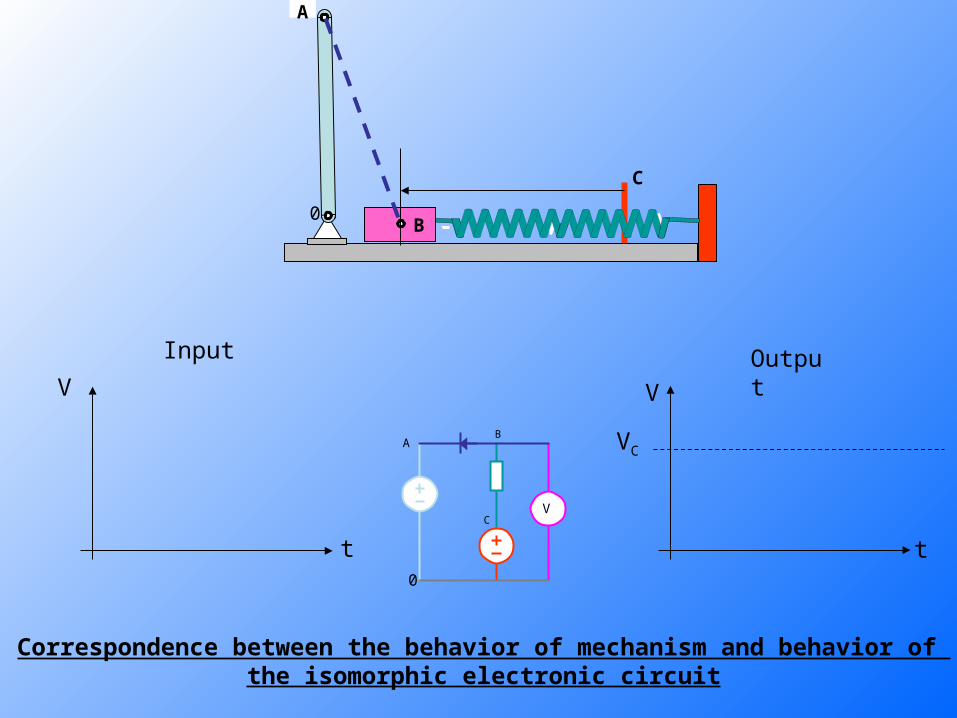
C
0
A
B
VC
0
BA
V
Output
V
VC
t
Input
V
t
Correspondence between the behavior of mechanism and behavior of the isomorphic electronic circuit
C
0
A
B
Output
V
VC
t
Input
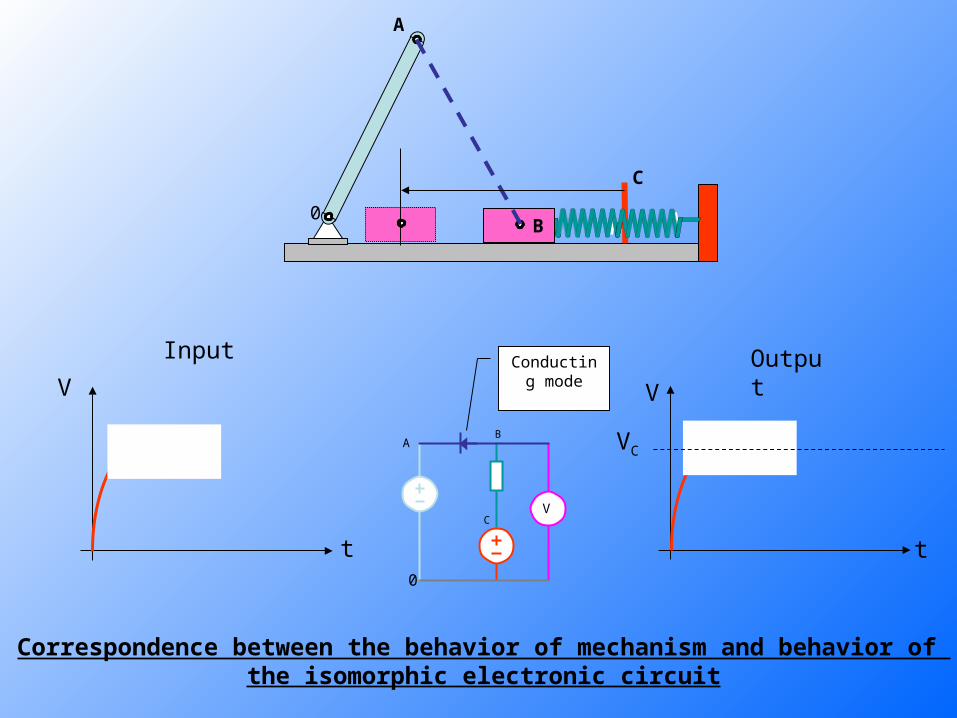
V
t
VC
0
BA
V
Conducting mode
Correspondence between the behavior of mechanism and behavior of the isomorphic electronic circuit

C
0
A
B
Output
V
VC
t
Input
V
t
VC
0
BA
V
Non-conducting
mode
L=0
U=0
Correspondence between the behavior of mechanism and behavior of the isomorphic electronic circuit

C
0
A
B
Output
V
VC
t
Input
V
t
VC
0
BA
V
Non-conducting
mode
L=0
U=0
Correspondence between the behavior of mechanism and behavior of the isomorphic electronic circuit

C
0
A
B
Output
V
VC
t
Input
V
t
VC
0
BA
V
Non-conducting
mode
L=0
U=0
Correspondence between the behavior of mechanism and behavior of the isomorphic electronic circuit

C
0
A
B
Output
V
VC
t
Input
V
t
VC
0
BA
V
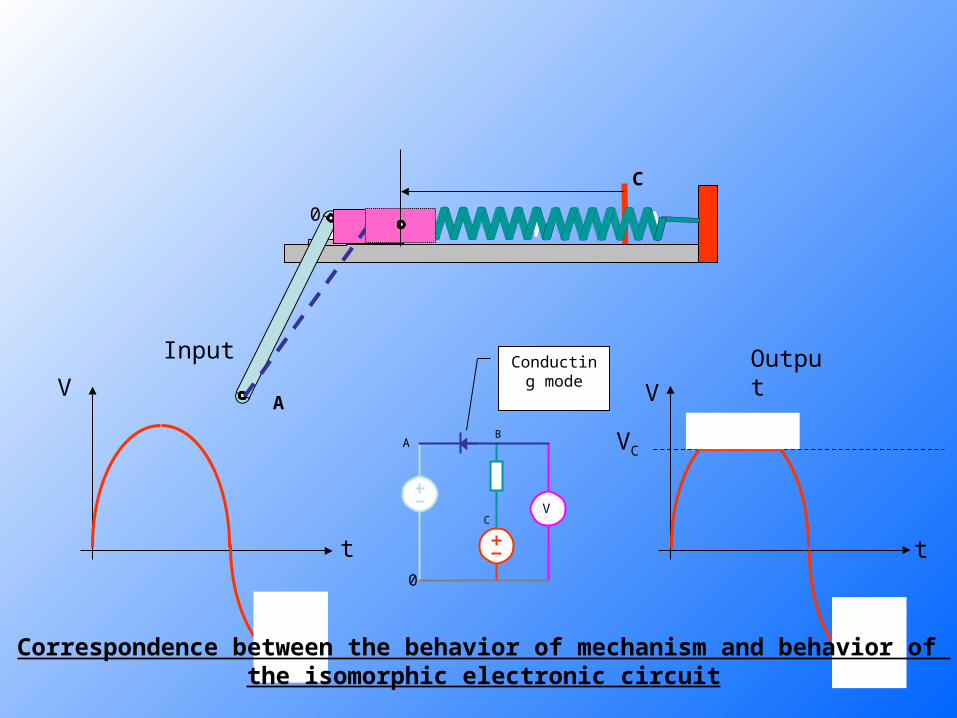
Conducting mode
Correspondence between the behavior of mechanism and behavior of the isomorphic electronic circuit

C
0
A
B
Output
V
VC
t
Input
V
t
VC
0
BA
V
Correspondence between the behavior of mechanism and behavior of the isomorphic electronic circuit
C
0
A
B
Output
V
VC
t
Input
V
t
VC
0
BA
V
Conducting mode
Correspondence between the behavior of mechanism and behavior of the isomorphic electronic circuit

Validity rule
• The engineering system is valid if and only if the transformed engineering system is valid.

C
0
A
B
VC
0
BA
V
Output
VVC
t
Input
V
t
Correspondence between the behavior of mechanism and behavior of the isomorphic electronic circuit in invalid configuration.

0
A
B
VC
0
BA
V
Output
V
t
Input
V
t
VC
Conducting mode
C
Correspondence between the behavior of mechanism and behavior of the isomorphic electronic circuit in invalid configuration.

C
0
A
B
VC
0
BA
V
Output
V
t
Input
V
t
VC
Conducting mode
L≠0
Correspondence between the behavior of mechanism and behavior of the isomorphic electronic circuit in invalid configuration.

C
0
A
B
VC
0
BA
V
Output
V
t
Input
V
t
VC
Conducting mode
Correspondence between the behavior of mechanism and behavior of the isomorphic electronic circuit in invalid configuration.

C
0
A
B
VC
0
BA
V
Output
V
t
Input
V
t
Correspondence between the behavior of mechanism and behavior of the isomorphic electronic circuit in invalid configuration.

C
0
A
VC
0
BA
V
Output
V
t
Input
V
t
VC
Conducting mode
B
Correspondence between the behavior of mechanism and behavior of the isomorphic electronic circuit in invalid configuration.

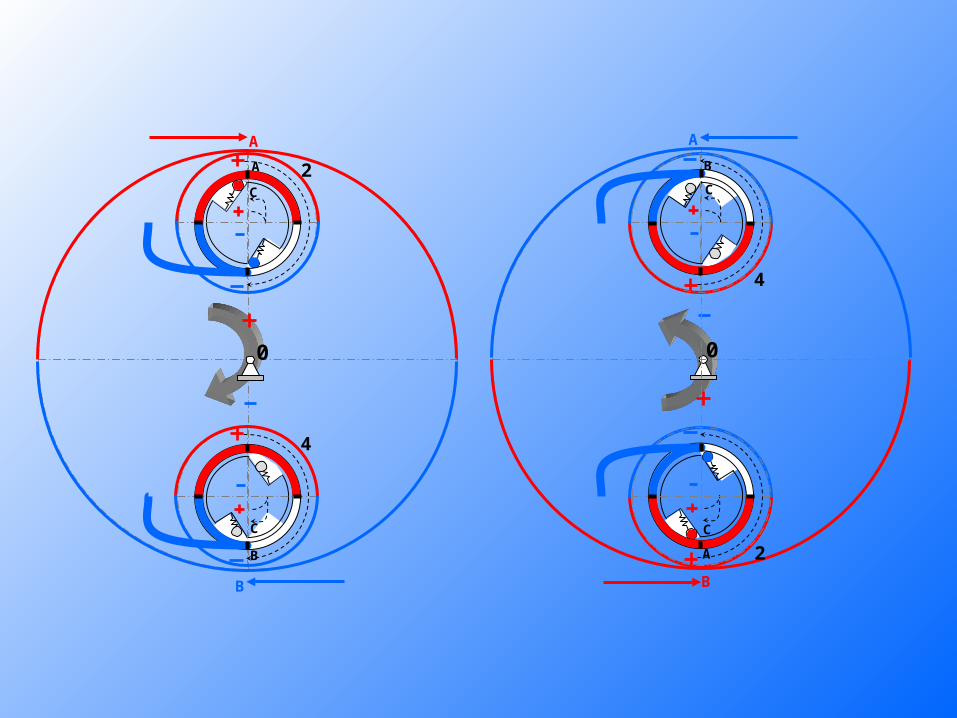
Additional Design ExamplesAdditional design of mechanical
rectifier
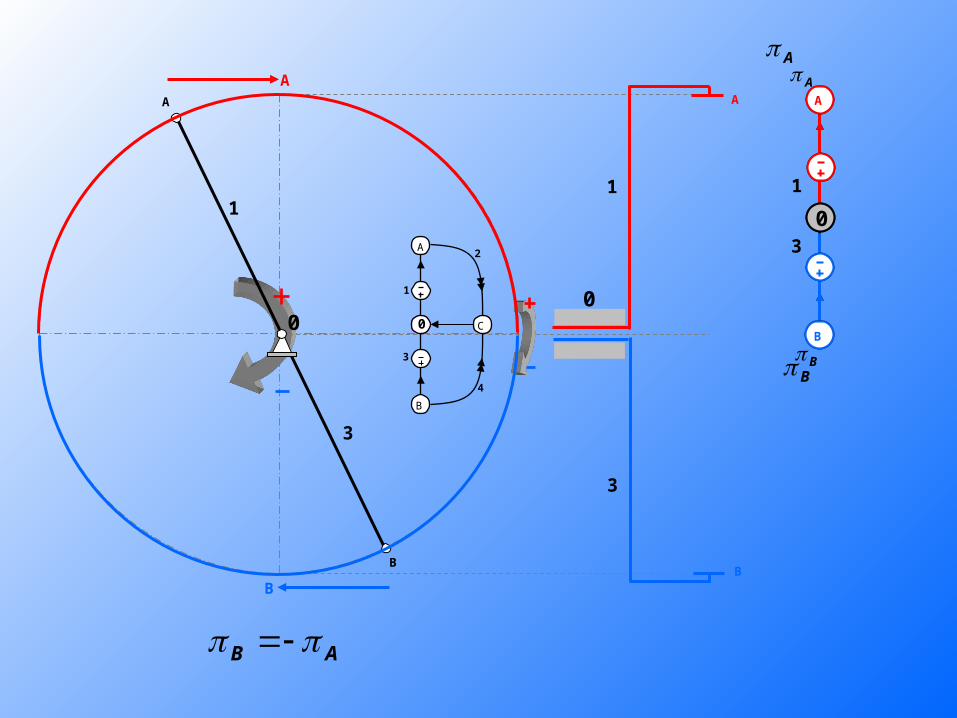
3
B
1
0
A
1
0
A
B
A
0
1
3
AA
B
AB
1
2
C
4
0
B
3
A
0
A
3
BB
B
A
B

0
A
0
B
A
0
1
3
A
B
0
A
3
BB
A
B
1
2AC
C
C
A
C
2 20
C

1
0
A
0
B
A
0
1
3
A
B
0
A
3
BB
A
B
2
C
C
A
C
2 2
B
C
4
0
4
BC
4
C
C
0

0
A
B
C
A 2
B
4
C
B
A
0
1
3
C
2
C
0
4
0
0
A
B
C
A 2
B
4
C
0
A
B
C
A 2
B
4
C





























