Embed Size (px)
Citation preview

Transforming Knowledge to Structures from Other Engineering Fields by
Means of Graph Representations.
Dr. Offer Shai and Daniel RubinDepartment of Mechanics, Materials and Systems
Faculty of EngineeringTel-Aviv University

Outline of the Talk
• Transforming knowledge through the graph theory duality.
• Practical applications – Checking truss rigidity. – Detecting singular positions in linkages.– Deriving a new physical entity – face force.
• Further research – form finding problems in tensegrity systems.
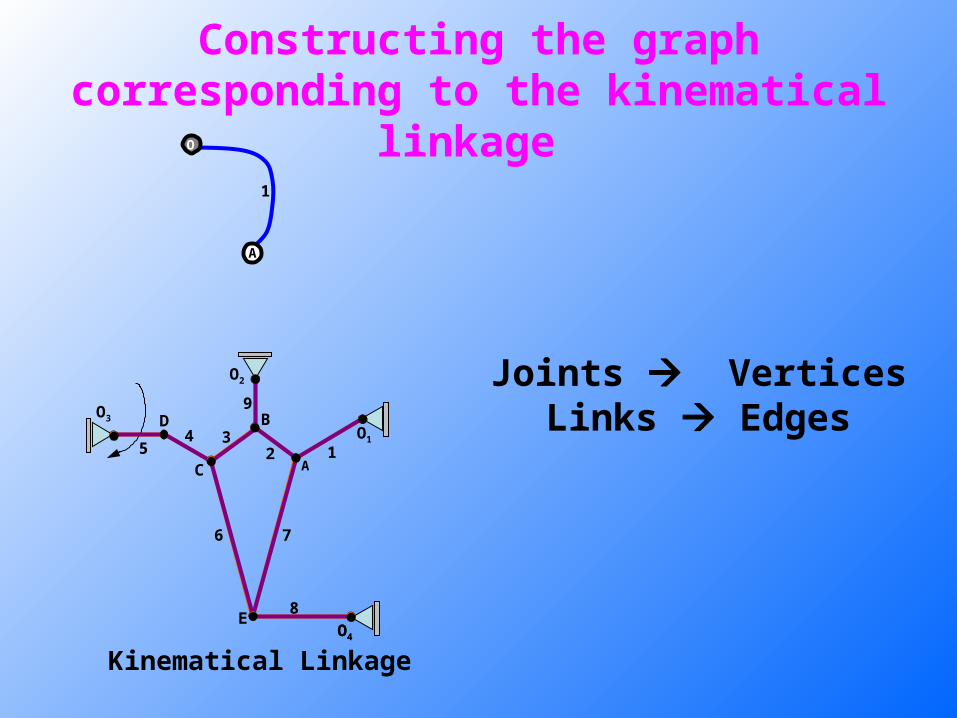
Kinematical Linkage
Constructing the graph corresponding to the kinematical linkage
Joints VerticesLinks EdgesO1
O2
O3
O4
A
B
C
D
E
1234
5
6 7
8
O4
O
1
A
9
Kinematical Linkage
Joints VerticesLinks EdgesO1
O2
O3
O4
B
C
D
E
1234
5
6 7
8
O4
A
O
1
A
B2
9
9
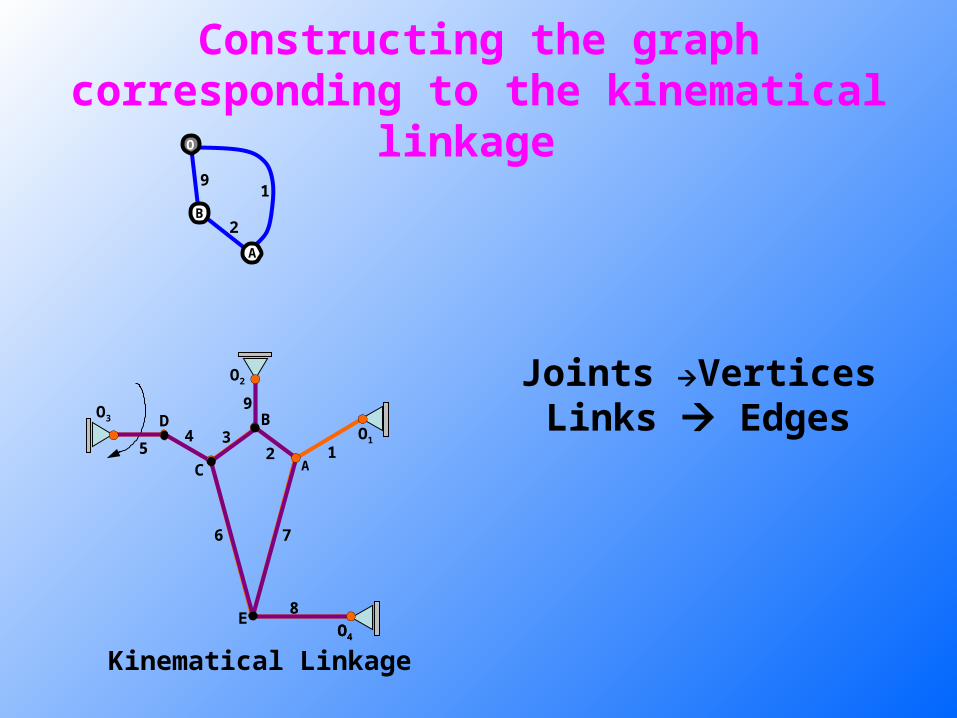
Constructing the graph corresponding to the kinematical linkage
Kinematical Linkage
Joints VerticesLinks EdgesO1
O3
O4
B
C
D
E
1234
5
6 7
8
O4
A
9
A
O
1B
2
9
C
3D4
5
O2
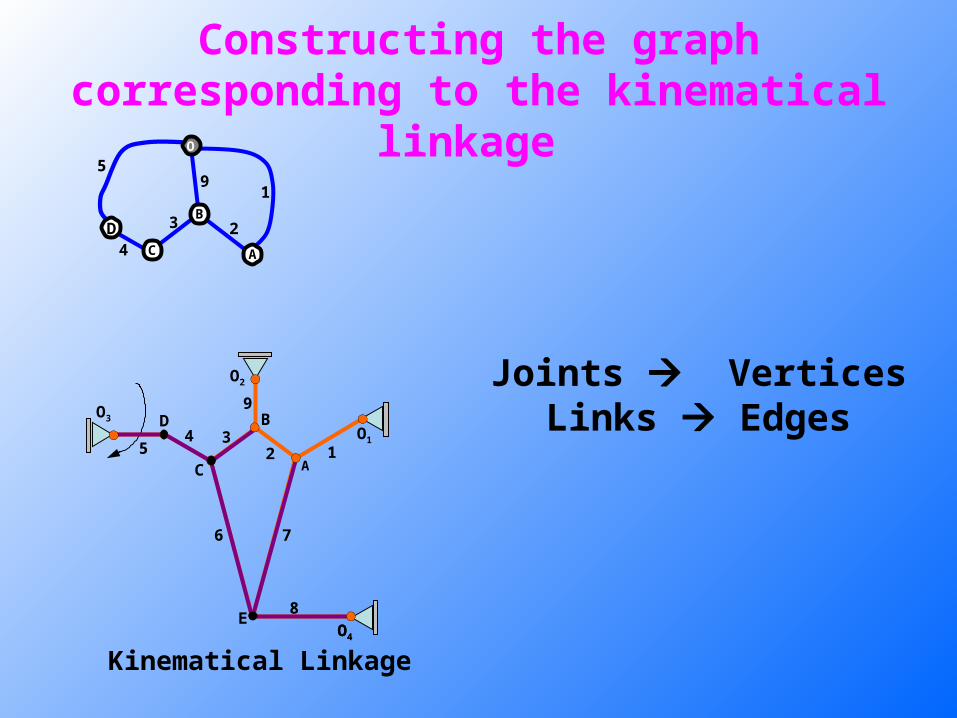
Constructing the graph corresponding to the kinematical linkage
Kinematical Linkage
Joints VerticesLinks Edges
O1
O2
O3
O4
B
C
D
E
1234
5
6 7
8
O4
A
9
A
O
1B
2
9
C
3D4
5
E
76
8
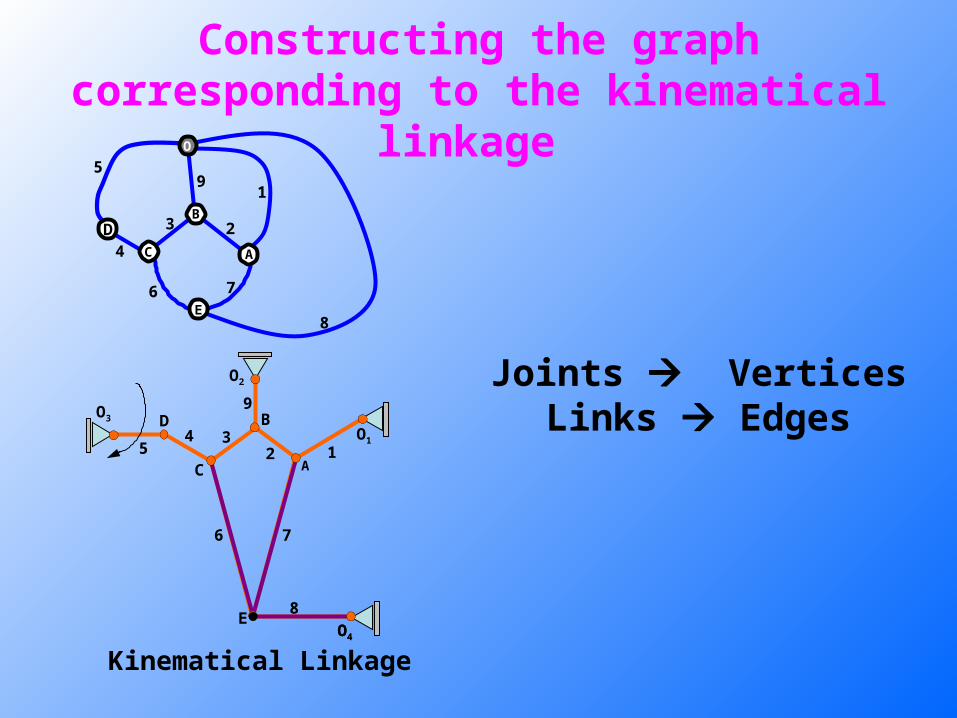
Constructing the graph corresponding to the kinematical linkage

The variables associated with the graph correspond to the physical variables of the system
Joint velocity Vertex potential
Link relative velocity Edge potential difference
1234
5
6 7
8
9
1
2
9
3
4
5
76
8

The potential differences in the graph representations satisfy the potential law
1234
5
6 7
8
9
1
2
9
3
4
5
76
8
Sum of potential differences in each Sum of potential differences in each circuit of the graph is equal to zero = circuit of the graph is equal to zero = polygon of relative linear velocities in polygon of relative linear velocities in
the mechanismthe mechanism

Static Structure
Now, consider a plane truss and its graph representation
Joints VerticesRods Edges
12
9
34
5
76
8
12
9
34
5
76
8O
A
OA

Static Structure
Rod internal force Flow through the edge
12
9
34
5
76
8
12
9
34
5
76
8
Now, consider a plane truss and its graph representation
Static Structure
12
9
34
5
76
8
12
9
34
5
76
8
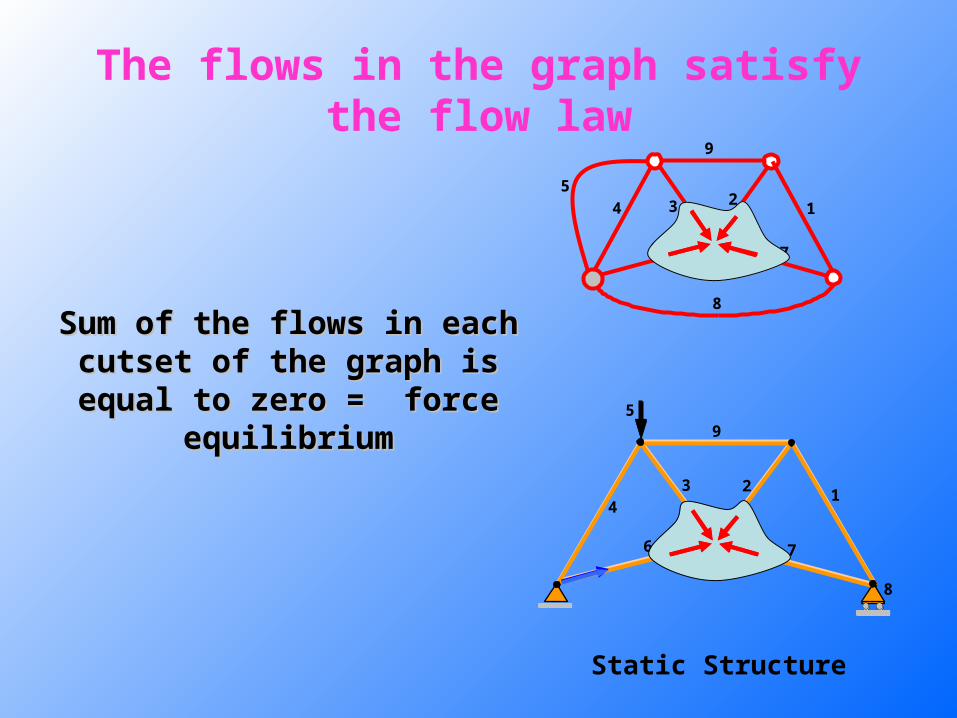
The flows in the graph satisfy the flow law
Sum of the flows in each cutset Sum of the flows in each cutset of the graph is equal to zero = of the graph is equal to zero =
force equilibriumforce equilibrium

Constructing the dual graph
- Face - circuit forming a non- bisected area in the drawing of the graph.
- For every face in the original graph associate a vertex in the dual graph.
- If in the original graph there are two faces adjacent to an edge –
e, then in the dual graph the corresponding two vertices are connected by an edge e’.

Constructing the dual graph

Consequently there is a duality between linkages and plane trusses

Kinematical Linkage Static Structure
The relative velocity of each link of the linkage is equal to the internal force in the corresponding rod of its dual plane truss.

Kinematical Linkage Static Structure
The equilibrium of forces in the truss = = compatibility of the relative velocities in the
dual linkage

Definitely locked !!!!!
Rigid ????
8
12’
2’
1’
11’
10’6’
7’
3’
5’
’
9’
R’
4’12’
9’
10’
R’11’
6 ’
7’
8’
2’
3’
5’1’
4’
8
5 9
2
4
7
10
11
1
12
6
3
11
7
3
4
122
1 5
8
9
106
Due to links 1 and 9 being located on the same line
Checking system rigidity through the duality

Using duality relation to detect singular positions
Linkages Plane Trusses
Potential difference = = Linear relative velocity
Flow == Force
Sum of potential differences at any circuit equals to zero
Sum of flows at any cutset equals to zero
Flow = Force Potential Difference = Displacement
Sum of flows at any cutset equals to zero
Sum of potential differences at any circuit equals to zero
Kinematical Analysis Statical Analysis
Deformation AnalysisSingular position detection

1
2
3
4
56
7
A'
B'
C'
Aπ
Bπ
Cπ
4
2
61
3 5
7
AB
C
1 3
2
4
56
7
DeformationsForces
Mechanism in singular position
Using duality relation to detect singular positions
2
15
6
43
Kinematical Linkage Static Structure
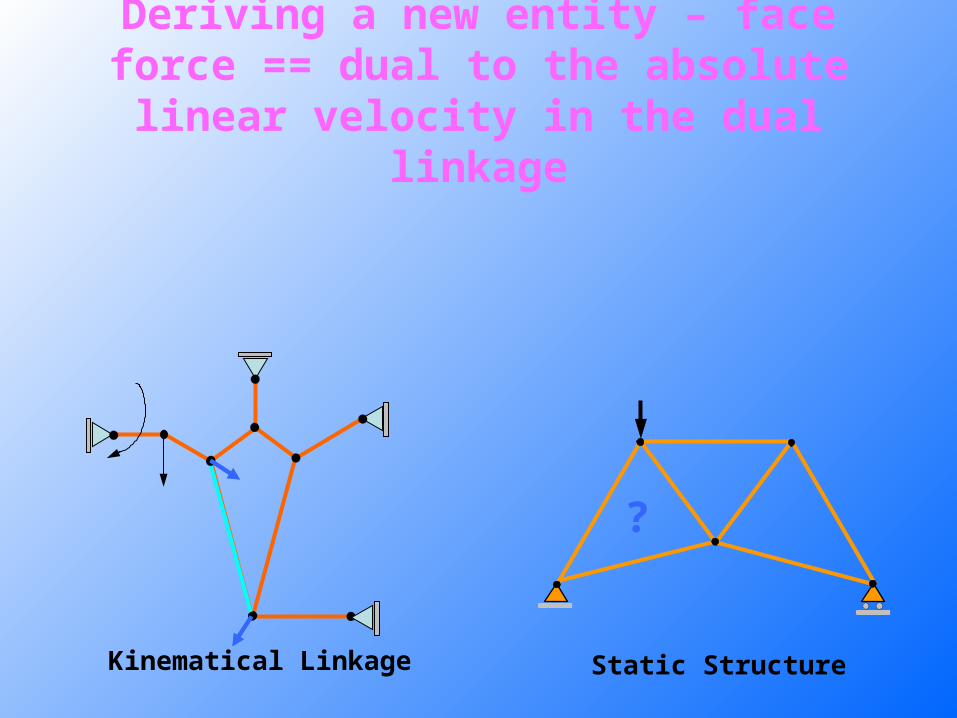
Deriving a new entity – face force == dual to the absolute linear velocity in the dual linkage
?
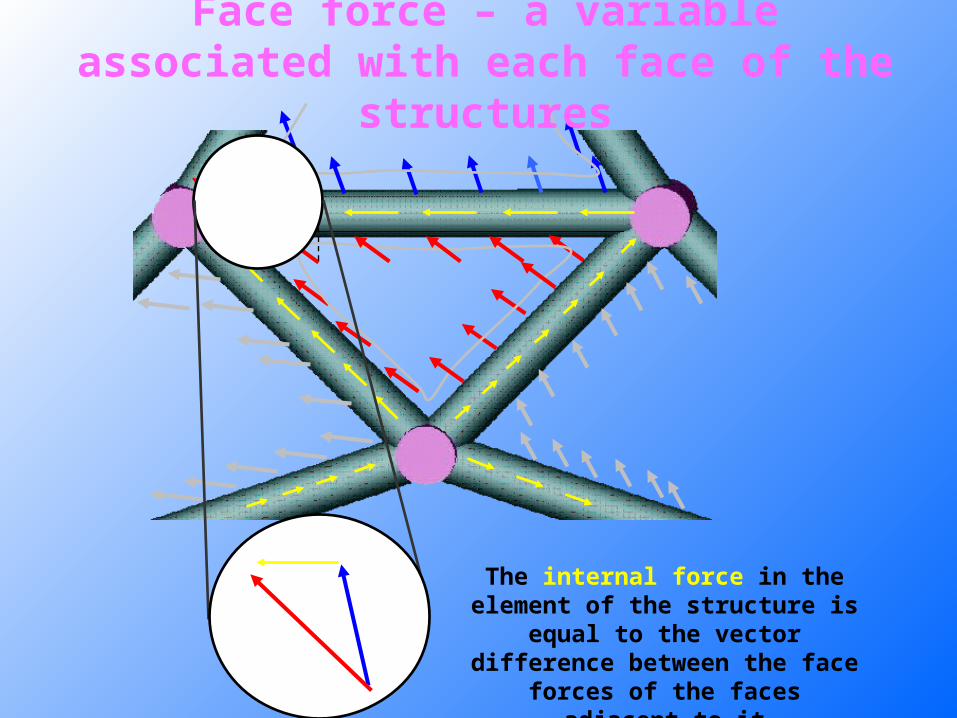
Face force – a variable associated with each face of the structures
The internal force in the element of the structure is equal to the
vector difference between the face forces of the faces adjacent to it
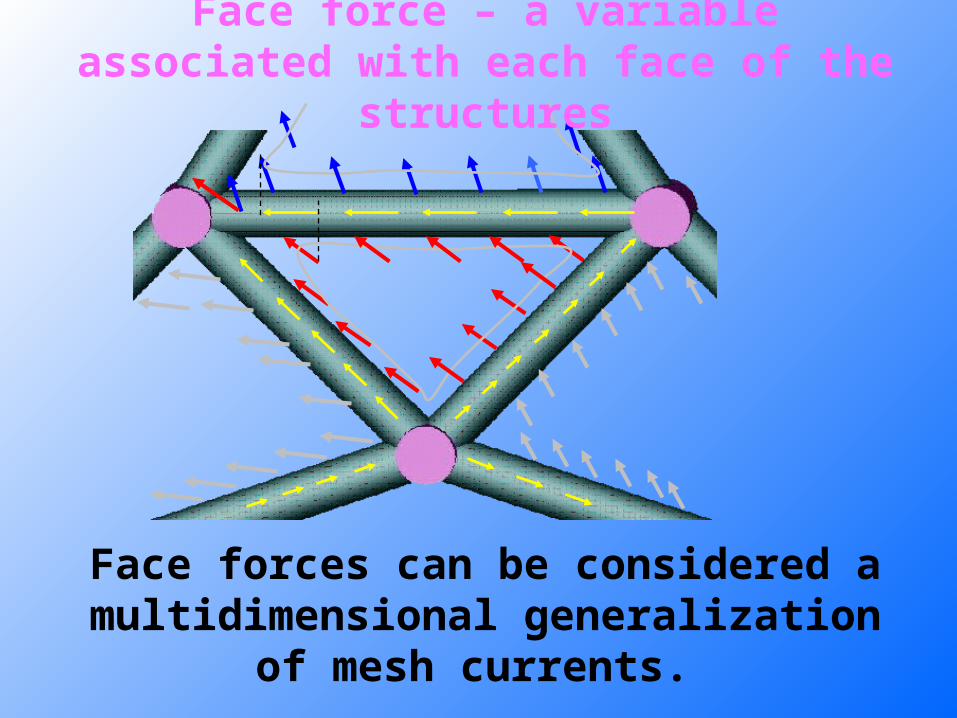
Face force – a variable associated with each face of the structures
Face forces can be considered a multidimensional generalization of mesh
currents.

It was proved that face forces manifest some properties of electric potentials.
pathrodFF ii
rodface i

• The works of Maxwell reaffirm some of the results derived through the graph representations, among them: duality between linkages and trusses, face force, and more …

Maxwell Diagramlines in the diagram are associated with the
rods of the structure
II
VI
IIIV
I
IV
O
III
IV
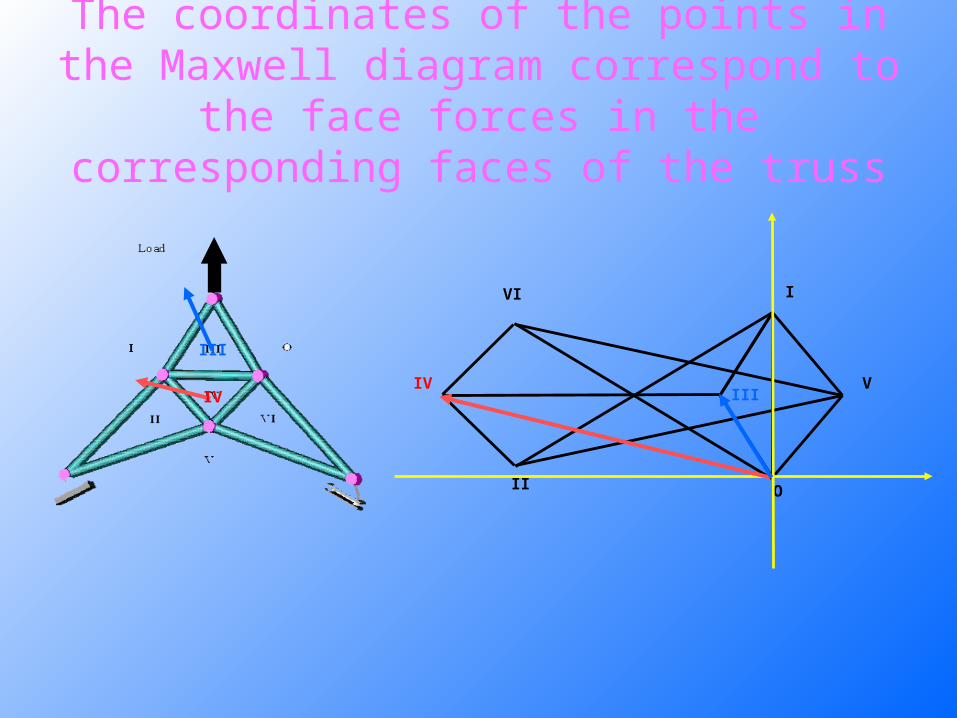
The coordinates of the points in the Maxwell diagram correspond to the face forces in the
corresponding faces of the truss
II
VI
IIIV
I
IV
O
III
IV

Verifying truss-linkage duality through the work of Maxwell
II
IIIIV
O
V
IVI
O1O2O3O4
III
IV

Verifying truss-linkage duality through the work of Maxwell
III
IV

Verifying truss-linkage duality through the work of Maxwell
III
IV

Further research – form finding problem in tensegrity systems
A
B C
D
12
3
45
6
Tensegrity system at unstable configuration
III
I
II
O
1
2
3
4
5
6
C
DA
B
Graph representation of the tensegrity system
43
5
2
1
6
II
III
I
Arbitrary chosen faces forces
4
5
61
3 2
Resulting stable configuration of the tensegrity system

Thank you !!!
For more information contact Dr. Offer Shai
Department of Mechanics, Materials and SystemsFaculty of Engineering
Tel-Aviv University
This and additional material can be found at:
http://www.eng.tau.ac.il/~shai



![Shai Halevi IBM Research - Home Page for Shai Halevi · Shai Halevi –IBM Research Based Mostly on [van-Dijk, Gentry, Halevi, Vaikuntanathan, EC 2010] 1 Winter School on Secure Computation](https://img.dokumen.tips/doc/110x75/5eb594aa9a6d8e70230934fb/shai-halevi-ibm-research-home-page-for-shai-halevi-shai-halevi-aibm-research.jpg)
























