Embed Size (px)
Citation preview
Daljinska detekcija u prikupljanju prostornih podataka
2
Definicija daljinske detekcije
l Daljinska detekcija je nauka (u nekom smislu veština) prikupljanja informacija o Zemljinoj površi i objektima koji se nalaze na njoj, a da se tom prilikom ne dolazi u kontakt sa njima. To se obavlja registrovanjem odbijene ili emitovane energije od površi Zelje i objekata uz naknadno obrade i analize i kasniju primenu takvih informacija.
3
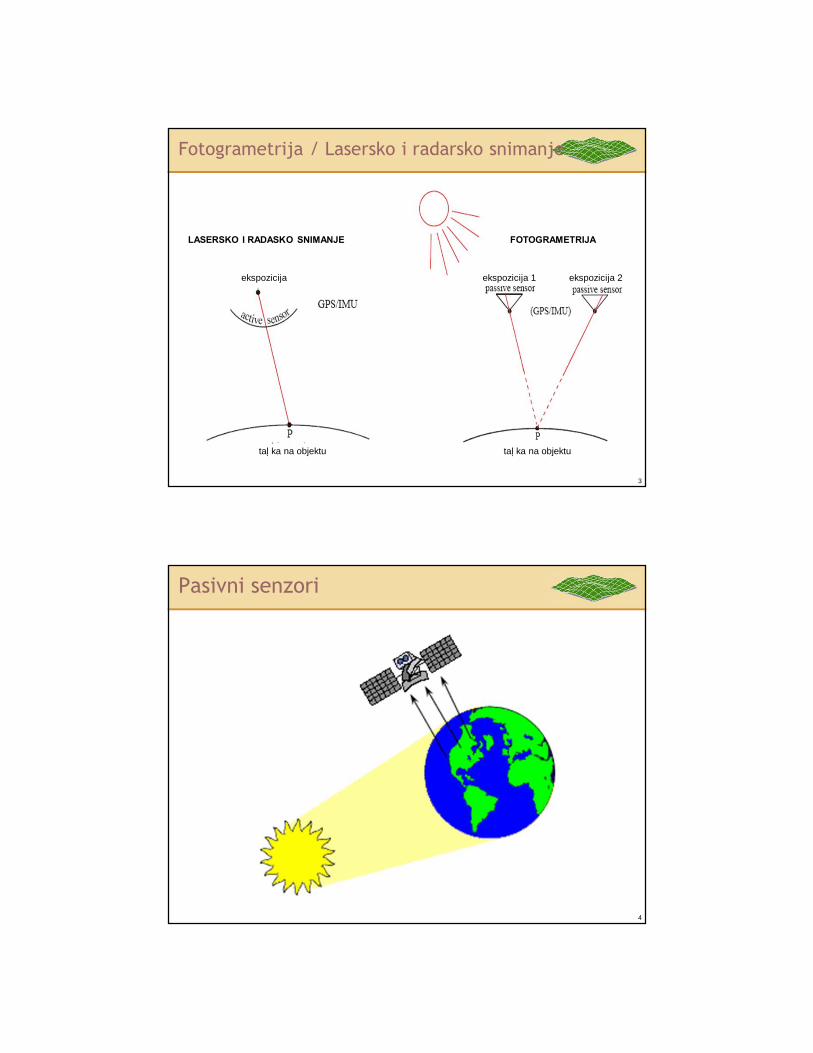
Fotogrametrija / Lasersko i radarsko snimanje
tačka na objektu tačka na objektu
ekspozicija ekspozicija 1 ekspozicija 2
LASERSKO I RADASKO SNIMANJE FOTOGRAMETRIJA
4
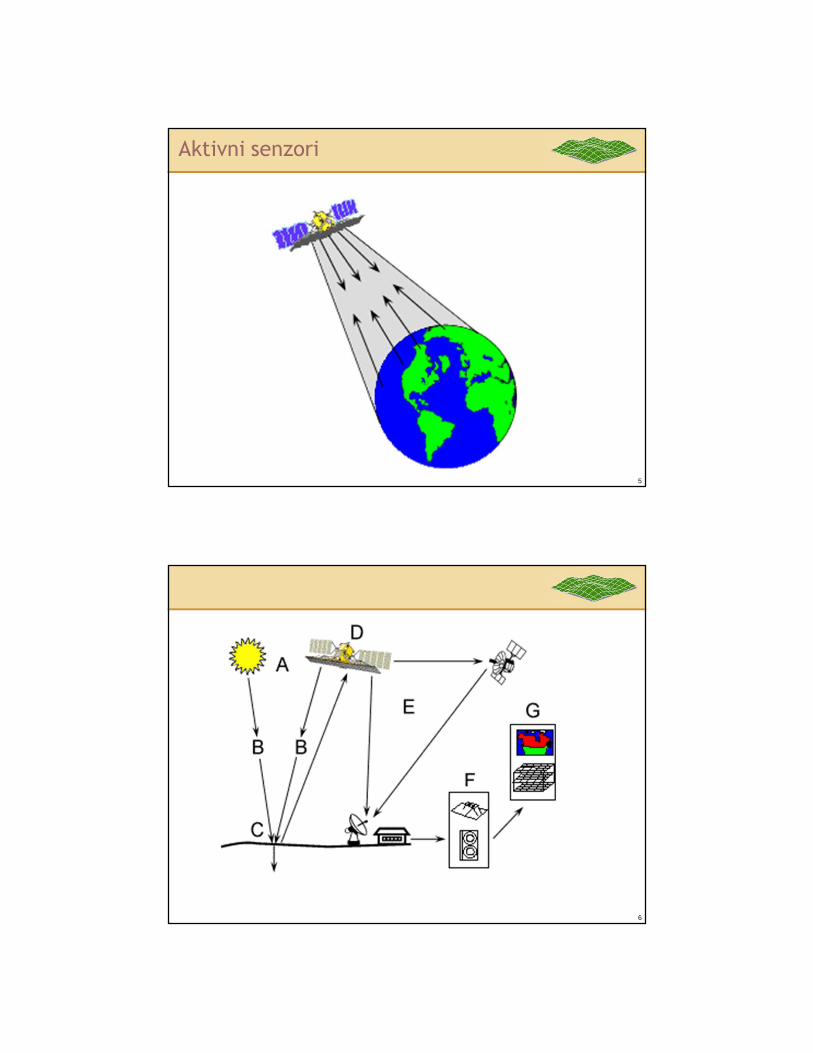
Pasivni senzori
5
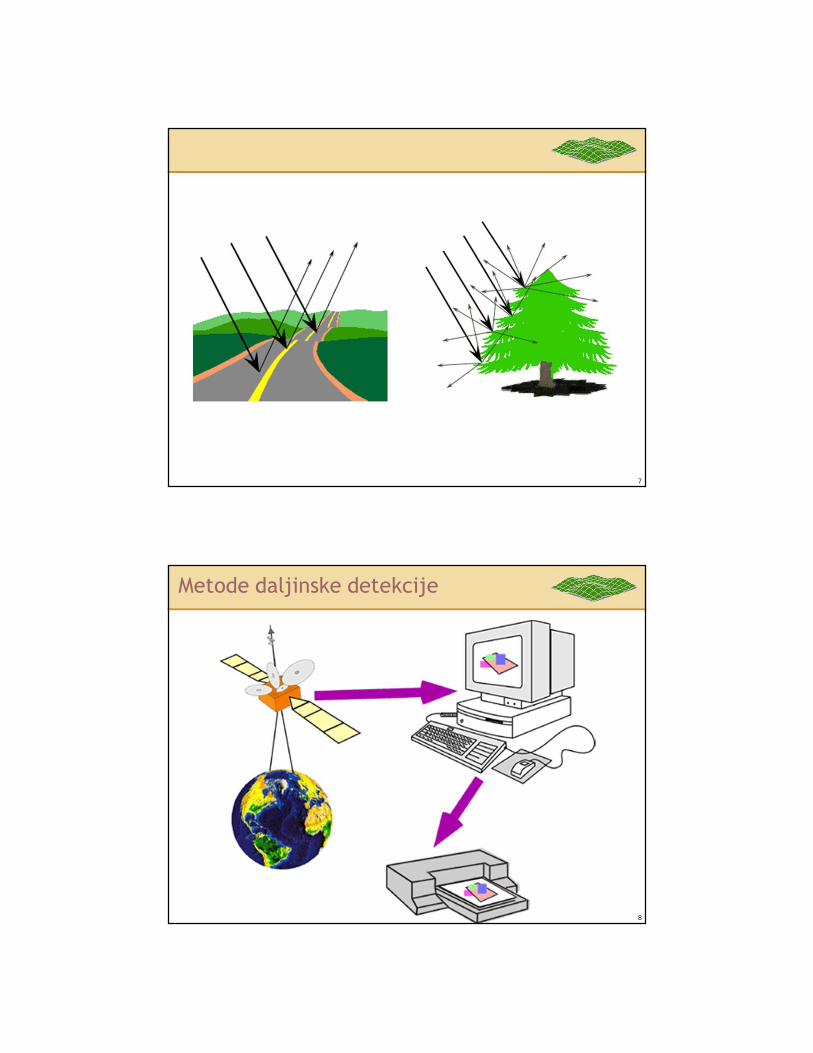
Aktivni senzori
6
7
8
Metode daljinske detekcije
9
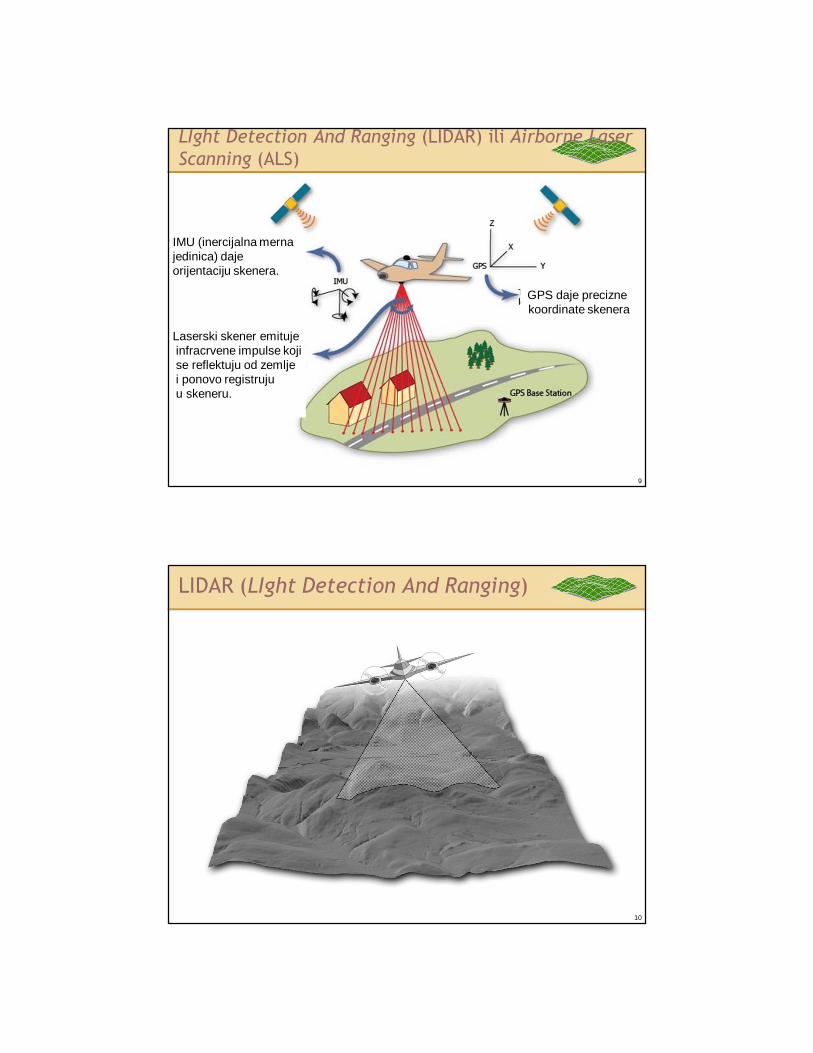
LIght Detection And Ranging (LIDAR) ili Airborne Laser Scanning (ALS)
GPS daje precizne koordinate skenera
Laserski skener emitujeinfracrvene impulse kojise reflektuju od zemljei ponovo registrujuu skeneru.
IMU (inercijalna merna jedinica) daje orijentaciju skenera.
10
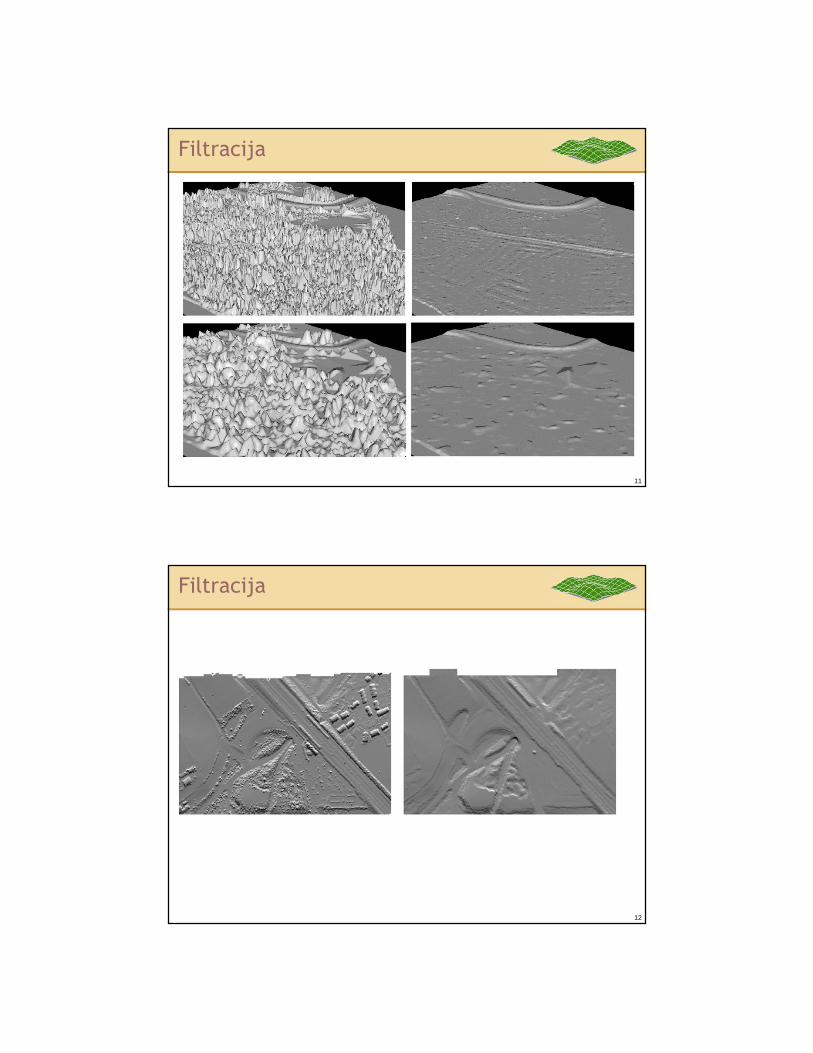
LIDAR (LIght Detection And Ranging)
11
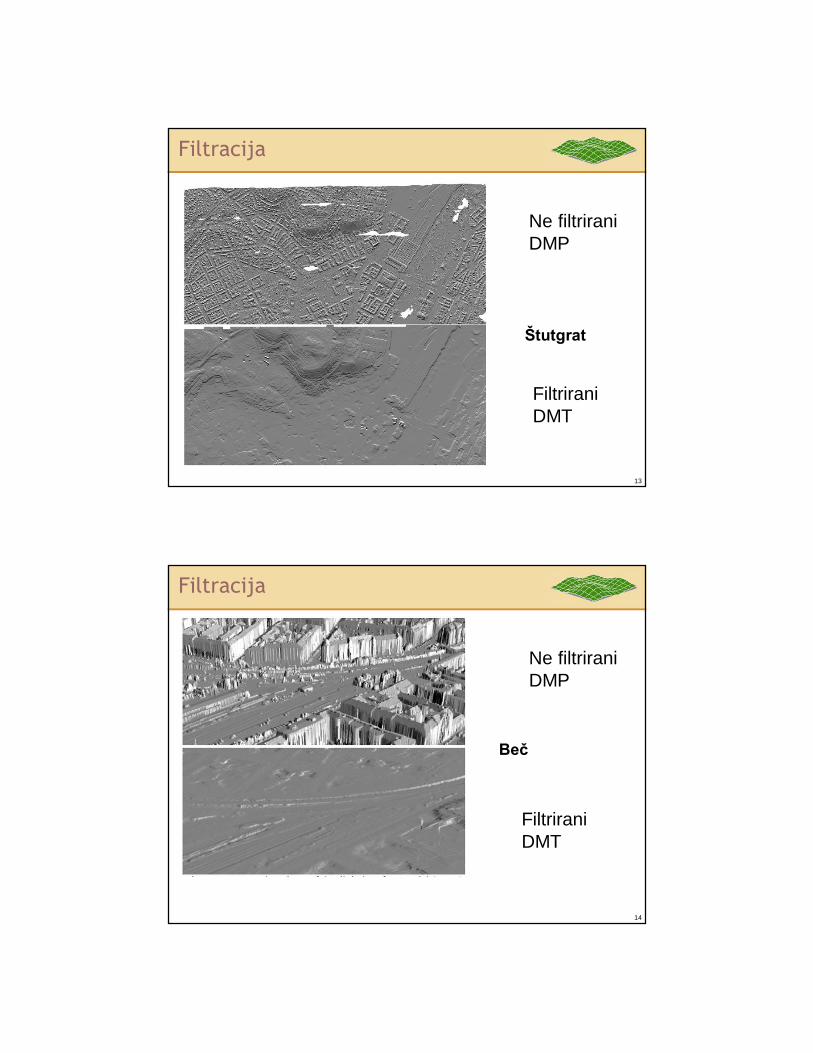
Filtracija
12
Filtracija
13
Filtracija
Štutgrat
Ne filtriraniDMP
FiltriraniDMT
14
Filtracija
Ne filtriraniDMP
FiltriraniDMT
Beč
15
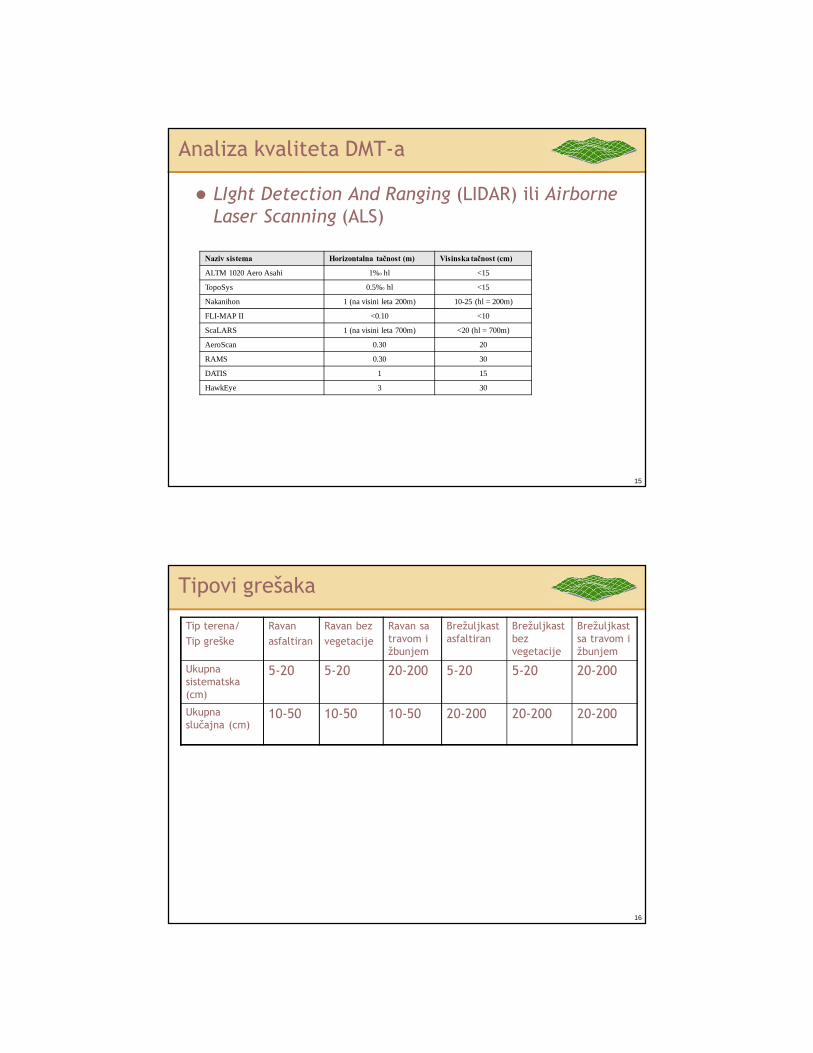
Analiza kvaliteta DMT-a
l LIght Detection And Ranging (LIDAR) ili Airborne Laser Scanning (ALS)
Naziv sistema Horizontalna tačnost (m) Visinska tačnost (cm)
ALTM 1020 Aero Asahi 1%0 hl <15
TopoSys 0.5%0 hl <15
Nakanihon 1 (na visini leta 200m) 10-25 (hl = 200m)
FLI-MAP II <0.10 <10
ScaLARS 1 (na visini leta 700m) <20 (hl = 700m)
AeroScan 0.30 20
RAMS 0.30 30
DATIS 1 15
HawkEye 3 30
16
Tipovi grešaka
Tip terena/Tip greške
Ravanasfaltiran
Ravan bezvegetacije
Ravan sa travom i žbunjem
Brežuljkast asfaltiran
Brežuljkast bez vegetacije
Brežuljkast sa travom i žbunjem
Ukupna sistematska (cm)
5-20 5-20 20-200 5-20 5-20 20-200
Ukupna slučajna (cm)
10-50 10-50 10-50 20-200 20-200 20-200
17
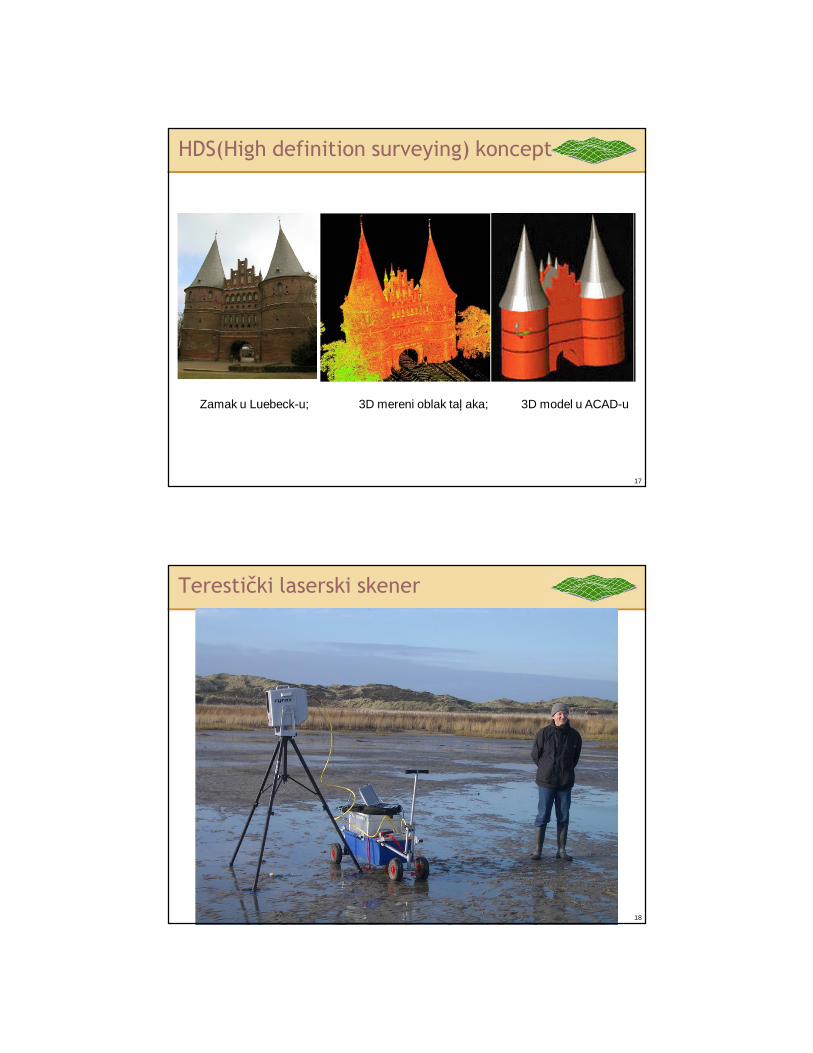
HDS(High definition surveying) koncept
Zamak u Luebeck-u; 3D mereni oblak tačaka; 3D model u ACAD-u
18
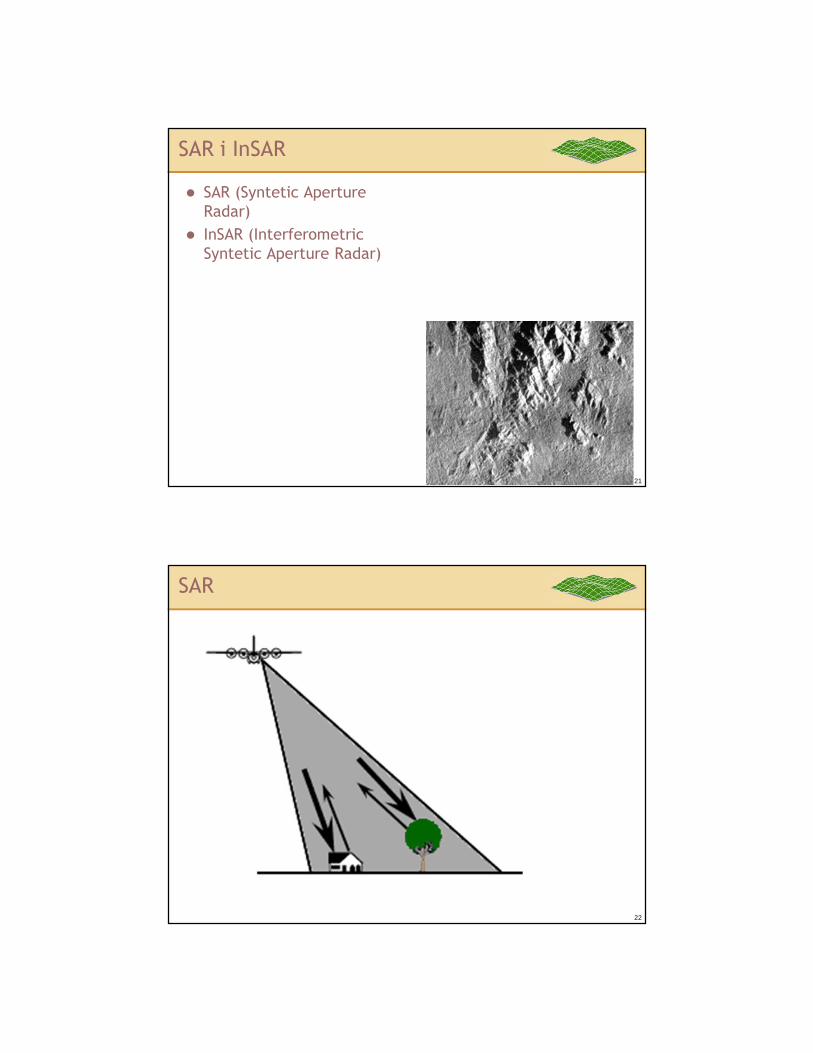
Terestički laserski skener

19
Tehničke karakteristike sistema Cyrax 2500
SISTEMSKE PERFORMANSE
Tačnost Pozicija 6mm
Dužina 4 mm
Ugao 12”
Preciznost Modelovanja površi 2 mm
LASER SISTEM SKENIRANJA
TIP LASERA Pulsni
BOJA Zelena
BEZBEDNOST Class II
VELIČINA TAČKE < 6 mm na 0 - 50 m
DOMETMaksimum do 100m
Preporučeni 1.5m - 50m (5%-100% difuzna reflektivnost)
BRZINA SKENIRANJA 1 Kolona/sec @1000 tač/kolona 2 kolone/sec @ 200 tač/kolona
GUSTINA SKENIRANJASelektibilnost Nezavista izbor vertikalnog i
horizonatalnog rastojanja između tačaka
Vertikalno 1.2 mm minimum rastojanja (@50m)
Horizontalno 1.2 mm minimum rastojanja (@50m)
Kolona 1,000 tačaka/kolona, max
Red 2,000 tačaka/red, max
1σ
20
Deformaciona merenja
21
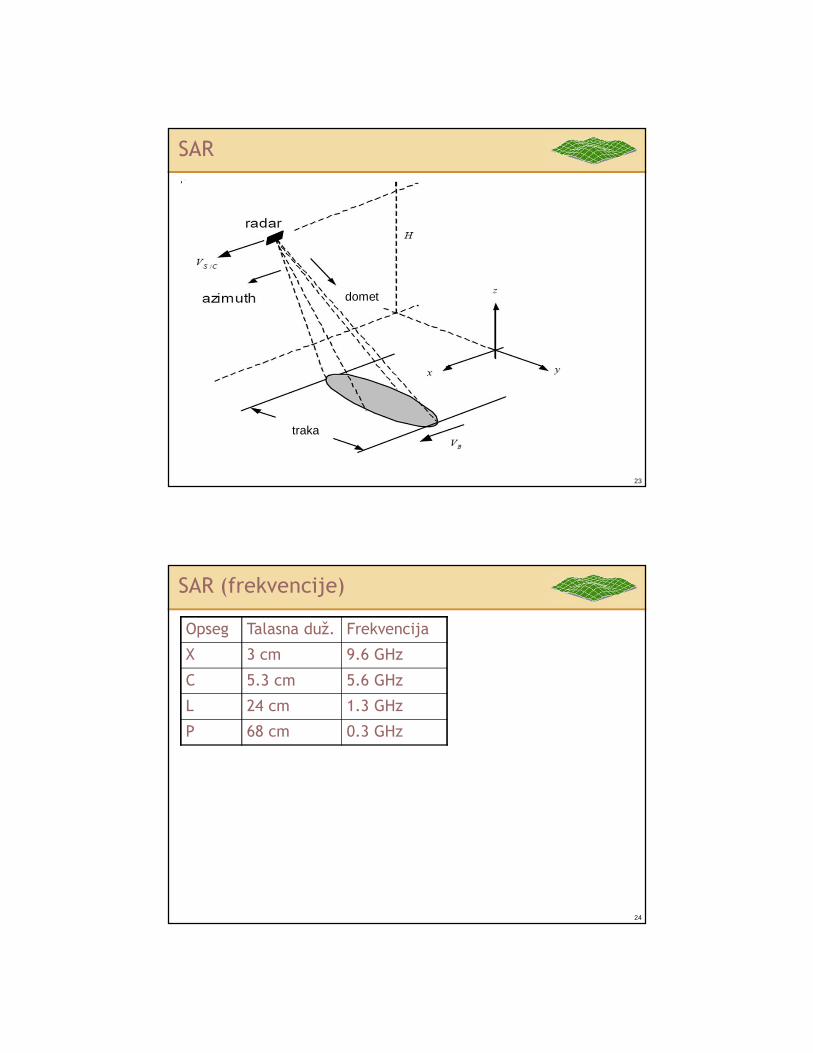
SAR i InSAR
l SAR (Syntetic Aperture Radar)
l InSAR (Interferometric Syntetic Aperture Radar)
22
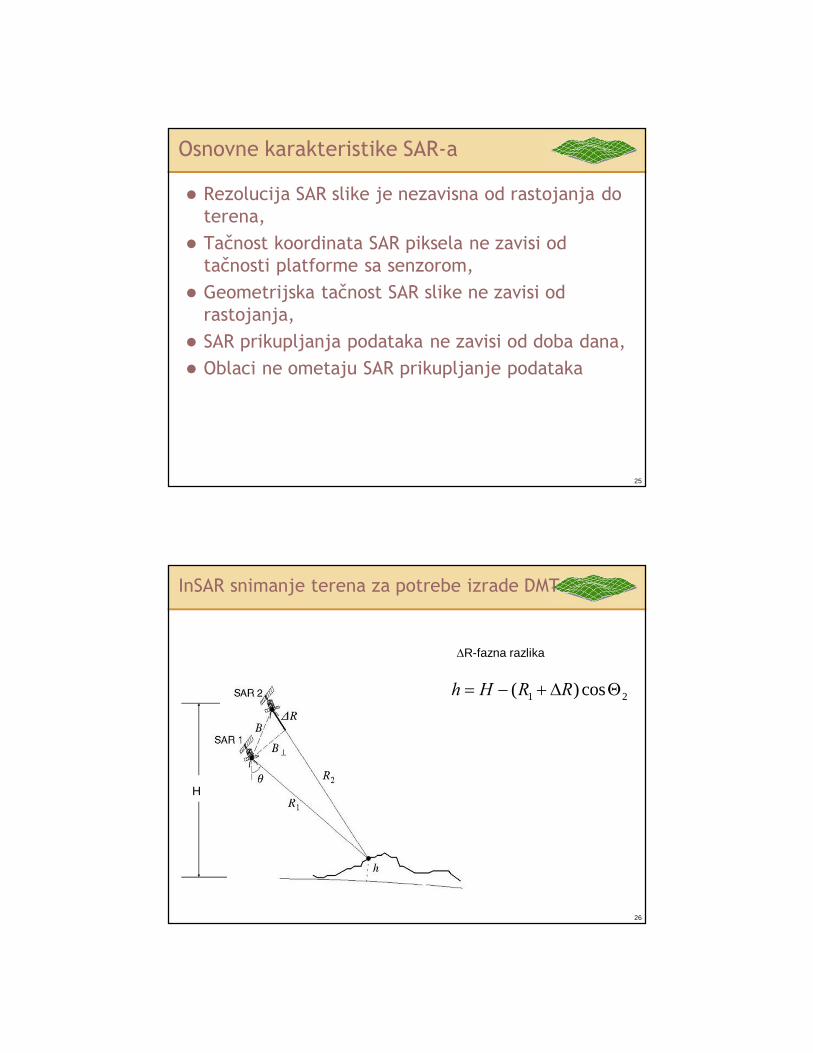
SAR
23
SAR
traka
domet
24
SAR (frekvencije)
Opseg Talasna duž. Frekvencija
X 3 cm 9.6 GHz
C 5.3 cm 5.6 GHz
L 24 cm 1.3 GHz
P 68 cm 0.3 GHz
25
Osnovne karakteristike SAR-a
l Rezolucija SAR slike je nezavisna od rastojanja do terena,
l Tačnost koordinata SAR piksela ne zavisi od tačnosti platforme sa senzorom,
l Geometrijska tačnost SAR slike ne zavisi od rastojanja,
l SAR prikupljanja podataka ne zavisi od doba dana,l Oblaci ne ometaju SAR prikupljanje podataka
26
InSAR snimanje terena za potrebe izrade DMT
H
∆R-fazna razlika
1 2( ) cosh H R R= − + ∆ Θ
27
SAR snimak
28
Analiza kvaliteta DMT-a
l Interferometric Synthetic Aperture Radar (InSAR)
Parametar INSAR (Star-3i) LIDAR
Visina leta 6000m - 9000m 300m – 1800m
Brzina leta 750km/čas ~200km/čas
Ugao zahvatanja 30o-60o +/- 20o (35omax)
Širina zahvata (na tlu) 5 – 8km 0.7 – 1 km
Rezolucija ortorektifikovane slike 2.5m /
Rezolucija merenja terena 2.5m, 5m, 10m 3 – 5m (0.5min)
Vertikalna tačnost DTM-a
Apsolutna 1.0m 15-35cm
Relativna (1σ) ~30cm /
Horizontalna tačnost DTM-a 2.5m 0.5-1.0m
Brzina akvizicije podataka
Maksimalna (km2/čas) 4 000 ~200
Prosečna (km2/čas) 1 000 ?
29
Niska rezolucija satelitskih snimaka
30
Visoka rezolucija satelitskih snimaka
31
Transmisija podataka
l A) direktno prema zemaljskoj satelitskoj stanici
l B) memorisanja podataka za naknanadnu transmisiju
l C) sa satelita na satelit i kasnijom transmisijom ka zemaljskoj sateliskoj stanici
32
Procesiranje snimaka
Tamno zelena: četinari Zelena: nisko granje svetlo ljubičasta: šljunak Žuta: listopadna šuma Narandžasta:suvo zemljište Crvena: vlažno zemljište Plava (svetlo):voda Plava (tamno): duboka ili čista voda





























