Embed Size (px)
Citation preview
Uniwersytet Jagielloński Instytut Fizyki
Czujniki magnetyczne wykorzystujące efekt Faradaya
Paulina Nakielna Jan Czerwiec
Praca magisterska wykonana w Zakładzie Fotoniki IF UJ
pod kierunkiem Prof. dr hab. Wojciecha Gawlika
Kraków 2007

- 2 -

Czujniki magnetyczne wykorzystujące efekt Faradaya
- 3-
Składamy najserdeczniejsze wyrazy podziękowania
Panu Prof. dr hab. Wojciechowi Gawlikowi
za okazaną pomoc, poświęcony czas, cierpliwość i opiekę podczas wykonywania tej pracy
Dr hab. Jerzemu Zachorowskiemu
oraz Dr Krzysztofowi DzierŜędze
za wszechstronną i fachową pomoc
InŜynierom i Technikom – pracownikom Warsztatu Mechanicznego którzy w róŜny sposób przyczynili się do powstania tej pracy

Czujniki magnetyczne wykorzystujące efekt Faradaya
- 5-
Spis treści WSTĘP .............................................................................................................................................................. 9
1. CZĘŚĆ TEORETYCZNA.................................................................................................................... 11
2. SYMULACJE WŁA ŚCIWO ŚCI MAGNETYCZNYCH KOMORY DO WYTWARZANIA POLA MAGNETYCZNEGO. ....................................................................................................................... 19
2.1. WPROWADZENIE............................................................................................................................ 19 2.1.1. Program FEMM a równania Maxwella.................................................................................... 20 2.1.2. Warunki brzegowe. ................................................................................................................... 21 2.1.3. Definiowanie zagadnienia......................................................................................................... 22 2.1.4. Generowanie rozwiązania zagadnienia. ................................................................................... 22
2.2. WYBÓR ODPOWIEDNIEJ KONFIGURACJI JARZMA KOMORY. ............................................................. 22 2.3. BADANIE JEDNORODNOŚCI INDUKCJI MAGNETYCZNEJ W OBSZARZE PRÓBKI. ................................. 26
3. UKŁAD POMIAROWY....................................................................................................................... 33
3.1. KOMORA DO WYTWARZANIA POLA MAGNETYCZNEGO I UKŁAD MOCOWANIA PRÓBKI.................... 35 3.2. UKŁAD DWÓCH RÓWNOLEGŁYCH LUSTER ZWIELOKRATNIAJĄCYCH LICZBĘ PRZEJŚĆ ŚWIATŁA PRZEZ
PRÓBKĘ........................................................................................................................................... 39 3.3. ŹRÓDŁO POLA MAGNETYCZNEGO. .................................................................................................. 40 3.4. PRÓBKI. .......................................................................................................................................... 41 3.5. ŹRÓDŁA ŚWIATŁA ........................................................................................................................... 45
3.5.1. Laser He-Ne.............................................................................................................................. 45 3.5.2. Diody LED. ............................................................................................................................... 45 3.5.3. Lasery półprzewodnikowe......................................................................................................... 47 3.5.4. Laser Nd:YAG........................................................................................................................... 48
3.6. UKŁADY DETEKCYJNE. ................................................................................................................... 48 3.6.1. Fotodioda i miernik mocy. ........................................................................................................ 48 3.6.2. Układ do pomiaru indukcji magnetycznej................................................................................. 49
4. CZĘŚĆ DOŚWIADCZALNA. ............................................................................................................. 51
4.1. BADANIE WIDM ŹRÓDEŁ ŚWIATŁA . ................................................................................................. 51 4.2. BADANIE ROZKŁADU INDUKCJI MAGNETYCZNEJ W KOMORZE. ....................................................... 52 4.3. POMIAR WSPÓŁCZYNNIKA ODBICIA DLA LUSTER. ........................................................................... 59 4.4. BADANIE PRZEJŚĆ ŚWIATŁA PRZEZ PRÓBKĘ.................................................................................... 60
4.4.1. Przejścia pojedyncze................................................................................................................. 61 4.4.2. Przejścia wielokrotne................................................................................................................ 67
5. ANALIZA I DYSKUSJA W YNIKÓW . .............................................................................................. 71
ROZWAśANIA DOTYCZĄCE PODROZDZIAŁU 2.2. ........................................................................................... 71 ROZWAśANIA DOTYCZĄCE PODROZDZIAŁU 2.3. ........................................................................................... 72 ROZWAśANIA DOTYCZĄCE PODROZDZIAŁU 4.4.1. ........................................................................................ 73
Badania kąta Faradaya dla próbek......................................................................................................... 73 Obliczenia stałej Verdeta dla próbek. ..................................................................................................... 76
ROZWAśANIA DOTYCZĄCE PODROZDZIAŁU 4.4.2. ........................................................................................ 77
6. PODSUMOWANIE .............................................................................................................................. 79
BIBLIOGRAFIA ............................................................................................................................................ 81
DODATEK A.RYSUNKI TECHNICZNE POSZCZEGÓLNYCH ELEMENTÓW KOMORY DO WYTWARZANIA POLA
MAGNETYCZNEGO I UKŁADU MOCOWANIA PRÓBKI. ...................................................................................... 83


Czujniki magnetyczne wykorzystujące efekt Faradaya
- 7-
OŚWIADCZENIE: Paulina Nakielna jest autorką rozdziałów:
• Rozdział 2 – Symulacje właściwości magnetycznych komory do wytwarzania pola magnetycznego: 2.1, 2.2, 2.3,
• Rozdział 3 – Układ pomiarowy: 3.4, • Rozdział 4 - Część doświadczalna: 4.1, 4.2, 4.4, • Rozdział 5 – Analiza i dyskusja wyników.
Jan Czerwiec jest autorem rozdziałów:
• Wstęp, • Rozdział 1 – Część teoretyczna, • Rozdział 3 – Układ pomiarowy: 3.1, 3.2, 3.3, 3.5, 3.6, • Rozdział 4 – Część doświadczalna: 4.3, • Rozdział 6 – Podsumowanie • Dodatek A

- 8 -

Czujniki magnetyczne wykorzystujące efekt Faradaya
- 9-
Wstęp
Niniejsza praca magisterska stanowi kontynuację pracy pod tytułem „Efekt Faradaya w TSAG/TPS 2/1” [1] wykonanej w roku akademickim 2005/2006 przez tych samych autorów.
Wspomniane wyŜej opracowanie [1] opisywało projekt i konstrukcję układu do pomiaru kąta skręcenia płaszczyzny polaryzacji i wstępne badania tego zjawiska. Jako źródło światła uŜyto lasera helowo–neonowego z układem termicznym stabilizującym jego polaryzację [2]. Próbką, był kryształ TSAG/TSP=2/1 domieszkowany 5% atomowymi Pr [3,4], umieszczony w zewnętrznym polu magnetycznym wytwarzanym przez elektromagnes o natęŜeniu pola B=1,2 T.
Głównym celem niniejszej pracy było opracowanie układu do pomiaru kąta skręcenia płaszczyzny polaryzacji i badań właściwości magnetooptycznych róŜnych materiałów, który w przyszłości będzie stanowiskiem pomiarowym dla studenckiej pracowni fotonicznej. Kolejnym celem naszej pracy było zmierzenie stałej Verdeta dla dostępnych próbek i sprawdzenie ich przydatności do pomiaru słabych pól magnetycznych. Wypróbowano teŜ zwiększenie czułości detekcji sygnału poprzez zastosowanie układu dwóch równoległych luster, korzystając z addytywności efektu Faradaya. Jako próbki zastosowano materiały ciałostałowe, w tym szkła i ceramiki, które umieszczaliśmy w zewnętrznym polu magnetycznym wytwarzanym przez układ magnesów neodymowych. W ramach pracy była teŜ analizowana moŜliwość budowy czujników słabych pól wykorzystujących efekt Faradaya, pracujących w zakresie (10-6 – 10-3)T. Jako źródło światła uŜyto lasera helowo–neonowego z układem termicznym stabilizującym polaryzację [2] (tego samego, co w pracy [1]), diod LED o podwyŜszonej jasności świecących na niebiesko, zielono i czerwono, laserów półprzewodnikowych (650 i 413 nm), oraz lasera ciałostałowego 532 nm. NatęŜenie światła przechodzącego przez próbkę mierzyliśmy za pomocą fotodiod oraz miernika mocy.
Niniejsza praca składa się z sześciu rozdziałów. Rozdział pierwszy zawiera fizyczne podstawy zagadnienia efektu Faradaya. W rozdziale drugim przedstawiamy symulacje przestrzennego rozkładu linii indukcji pola magnetycznego w zaprojektowanym układzie doświadczalnym. Przeprowadzone symulacje miały na celu oszacowanie wielkości indukcji magnetycznej oraz jej jednorodności w róŜnych konfiguracjach układu a tym samym wybranie układu doświadczalnego o odpowiednich parametrach przestrzennych. Rozdział trzeci zawiera opis poszczególnych części zaprojektowanego układu pomiarowego. Rozdział czwarty traktuje o przeprowadzonych pomiarach, w tym o badaniu: widm źródeł światła, rozkładu indukcji magnetycznej w komorze, współczynnika odbicia dla luster, przejść pojedynczych i wielokrotnych światła przez próbki. Rozdział piąty stanowi analizę, a szósty podsumowanie otrzymanych wyników. Jako dodatek załączamy rysunki techniczne zaprojektowanych przez nas części układu oraz wartości stałych Verdeta róŜnych materiałów.
- 10 -

Czujniki magnetyczne wykorzystujące efekt Faradaya
- 11-
1. Część teoretyczna.
W XIX wieku angielski fizyk i chemik Michael Faraday zaobserwował w próbkach ciałostałowych efekt, polegający na skręceniu płaszczyzny polaryzacji liniowo spolaryzowanego światła, przechodzącego przez próbkę znajdującą się w polu magnetycznym o wektorze indukcji zgodnym z kierunkiem propagacji światła [5]. Był to równieŜ pierwszy dowód na istnienie związku pomiędzy polem magnetycznym a światłem. Dopiero na przełomie lat 60-tych i 70-tych tego samego wieku James Clark Maxwell określił teoretyczne podstawy zjawiska zwanego dziś efektem Faradaya lub magnetorotacją.
Istnieje wiele czujników pola magnetycznego i magnetometrów, które pozwalają na pomiar wartości pola magnetycznego oraz/lub jego kierunku (zwrotu). Zasada działania czujnika wymaga spełnienia dwóch warunków [6]. Doborze odpowiedniego materiału, tak by był on jak najbardziej czuły na zmiany mierzonej wielkości fizycznej, oraz by wywołane przez pole magnetyczne zmiany innej wielkości mogły być w prosty sposób rejestrowane. Istnieją wysokoczułe magnetometry pozwalające na obrazowanie elektrycznych czynności mózgu (magnetoencefalografia – MEG [7]) w oparciu o SQUID1 [8] dla pól z zakresu ( )69 1010 −− − T oraz ultra czułe magnetometry SERF2 [9,
10] pozwalające na pomiar pola rzędu 1210− T. Bardzo popularne są magnetometry wykorzystujące efekt Halla, które pracują w zakresie ( )110 3 −− T [11]. Więcej na temat róŜnego typu magnetometrów i zasad ich działania moŜna znaleźć w [12].
Zdolność skręcenia płaszczyzny polaryzacji światła spolaryzowanego liniowo i rozchodzącego się wzdłuŜ kierunku pola B jest cechą ciał optycznie nieczynnych. Zjawisko to nazywane jest efektem Faradaya lub magnetycznym skręceniem płaszczyzny polaryzacji - magnetorotacją. W zjawisku Faradaya kierunek skręcenia płaszczyzny polaryzacji (dla obserwatora patrzącego wzdłuŜ kierunku pola magnetycznego) jest taki sam zarówno w przypadku, gdy światło pada zgodnie z kierunkiem wektora B, jak i w kierunku przeciwnym. Pod tym względem zjawisko Faradaya róŜni się od skręcenia płaszczyzny polaryzacji światła w naturalnych ciałach optycznie czynnych, gdzie moŜna wyróŜnić substancje prawo- lub lewoskrętne. Kąt skręcenia płaszczyzny polaryzacji θ [rad] jest proporcjonalny do drogi optycznej światła l [cm] w danej substancji oraz do natęŜenia pola magnetycznego B [Gs], co przedstawia wzór [5]:
lBV ⋅⋅=θ . (1.1)
Współczynnikiem proporcjonalności jest tzw. stała Verdeta V
⋅ cmGs
rad, czyli optyczna
stała materiałowa nazwana na cześć francuskiego fizyka Ẻmile Verdet, Ŝyjącego w latach 1824–1866, który zajmował się magnetyzmem i optyką [13]. Stała V w niewielkim stopniu zaleŜy od temperatury, natomiast silnie zaleŜy od długości λ fali świetlnej, a dla gazów i roztworów równieŜ od gęstości. W większości wypadków V ma wartość dodatnią, przy czym jest ona znikomo mała, natomiast dla niektórych
1 SQUID – ang. Superconducting Quantum Interference Device, urządzenie wykorzystujące efekt Josephsona i zmiany strumienia indukcji magnetycznej w pierścieniu nadprzewodzącym. 2 SERF – ang. Spin Exchange Relaxation-free, magnetometr atomowy, działający na zasadzie pomiaru precesji spinu niesparowanych elektronów par atomowych. Specyfiką układu SERF jest redukcja relaksacji zderzeniowej ograniczającej czułość magnetometrów atomowych.

- 12 -
materiałów ma wartość ujemną. NajwyŜsze wartości otrzymywane są dla ośrodków paramagnetycznych, na przykład dla cięŜkiego fintu, domieszkowanego jonami paramagnetycznego terbu oraz dla kryształu granatu domieszkowanego galem i terbem (TGG) [14]. Kryształ TGG ma bardzo duŜą transmisję w zakresie widzialnym i jest odporny na uszkodzenia spowodowane światłem laserowym [15]. ZaleŜność temperaturowa V jest znacznie silniejsza dla roztworów i paramagnetyków. Dla paramagnetyków mamy w przybliŜeniu ( ) 1−∝ TTV [16], gdzie T oznacza temperaturę bezwzględną, a dla roztworów (zgodnie z pracą [17]):
( ) ( )cmGs
TTV⋅
⋅⋅−⋅−= −−−− min101005,31005,31 2255 . (1.2)
Szczególnie duŜą wartość V przyjmuje dla ferromagnetyków. ZaleŜność od długości fali świetlnej λ w pierwszym przybliŜeniu opisuje półempiryczny wzór Becquerela [17]:
( )λνλ
ρλd
dn
m
eV ⋅⋅=
22 , (1.3)
gdzie e i m oznaczają ładunek i masę elektronu, ρ gęstość substancji, n współczynnik załamania, a ν częstotliwość fali świetlnej. Dokładniej [17] zaleŜność tę przedstawia wzór:
( )
⋅+⋅⋅⋅= ∑ νννλρλ
d
dR
M
E
d
dR
m
eV je
24
3, (1.4)
gdzie Re i Rj to odpowiednio refrakcja (polaryzacja) elektronowa i atomowa cząsteczki (polaryzacja cząsteczek), a E i M to ładunek i masa jądra. Dla scharakteryzowania magnetycznego skręcenia płaszczyzny polaryzacji obok stałej Verdeta stosuje się równieŜ molową stałą skręcenia magnetycznego D [17], którą przedstawia wzór:
Ω+
=2
92n
nD , (1.5)
Gdzie Ω oznacza skręcenie molowe 'ρ
V=Ω , a ρ’ to gęstość molową [mol/cm3].
Wprowadzenie nowej wielkości molowej D uniezaleŜnia charakterystykę ośrodka od gęstości roztworu i od stanu skupienia substancji. W wielu wypadkach jest to wielkość addytywna.
Efekt Faradaya moŜna zaobserwować w róŜnego typu próbkach, czyli w próbkach gazowych, jak uczyniono to w pracy [18] dla powietrza lub w [19] dla par atomowych, ciekłych oraz ciałostałowych, ale takŜe w ciekłych kryształach, ceramikach [3,4], substancjach amorficznych [20,21], kryształach [3,4] i w tak egzotycznych materiałach jak półprzewodniki magnetyczne, w tym kryształach TeFeMnCd yxyx−−1
[22]. Jedynymi warunkami jakie muszą spełniać próbki faradayowskie są: mały współczynnik absorpcji, duŜy współczynnik transmisji oraz wypolerowana powierzchnia [6,22], która minimalizuje odbicie oraz zmniejsza rozproszenia światła od powierzchni.
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 13-
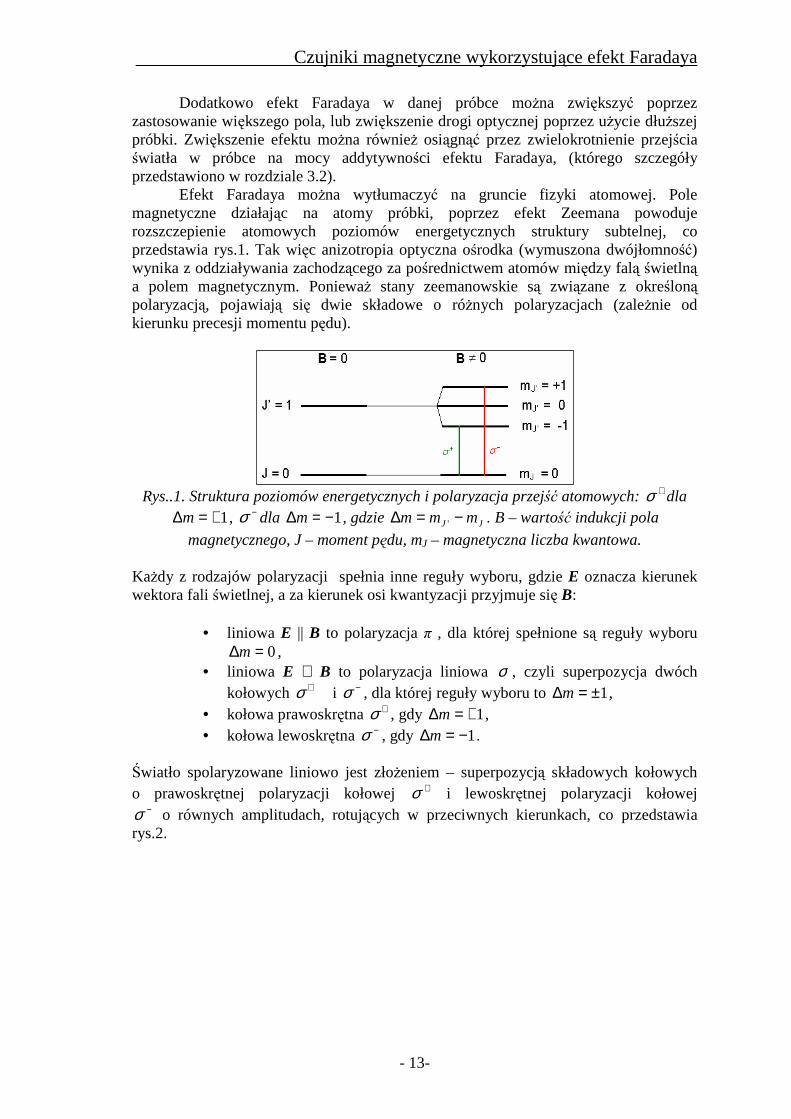
Dodatkowo efekt Faradaya w danej próbce moŜna zwiększyć poprzez zastosowanie większego pola, lub zwiększenie drogi optycznej poprzez uŜycie dłuŜszej próbki. Zwiększenie efektu moŜna równieŜ osiągnąć przez zwielokrotnienie przejścia światła w próbce na mocy addytywności efektu Faradaya, (którego szczegóły przedstawiono w rozdziale 3.2). Efekt Faradaya moŜna wytłumaczyć na gruncie fizyki atomowej. Pole magnetyczne działając na atomy próbki, poprzez efekt Zeemana powoduje rozszczepienie atomowych poziomów energetycznych struktury subtelnej, co przedstawia rys.1. Tak więc anizotropia optyczna ośrodka (wymuszona dwójłomność) wynika z oddziaływania zachodzącego za pośrednictwem atomów między falą świetlną a polem magnetycznym. PoniewaŜ stany zeemanowskie są związane z określoną polaryzacją, pojawiają się dwie składowe o róŜnych polaryzacjach (zaleŜnie od kierunku precesji momentu pędu).
Rys..1. Struktura poziomów energetycznych i polaryzacja przejść atomowych: +σ dla
1+=∆m , −σ dla 1−=∆m , gdzie JJ mmm −=∆ ' . B – wartość indukcji pola
magnetycznego, J – moment pędu, mJ – magnetyczna liczba kwantowa. KaŜdy z rodzajów polaryzacji spełnia inne reguły wyboru, gdzie E oznacza kierunek wektora fali świetlnej, a za kierunek osi kwantyzacji przyjmuje się B:
• liniowa E || B to polaryzacja π , dla której spełnione są reguły wyboru 0=∆m ,
• liniowa E ⊥ B to polaryzacja liniowa σ , czyli superpozycja dwóch kołowych +σ i −σ , dla której reguły wyboru to 1±=∆m ,
• kołowa prawoskrętna +σ , gdy 1+=∆m , • kołowa lewoskrętna −σ , gdy 1−=∆m .
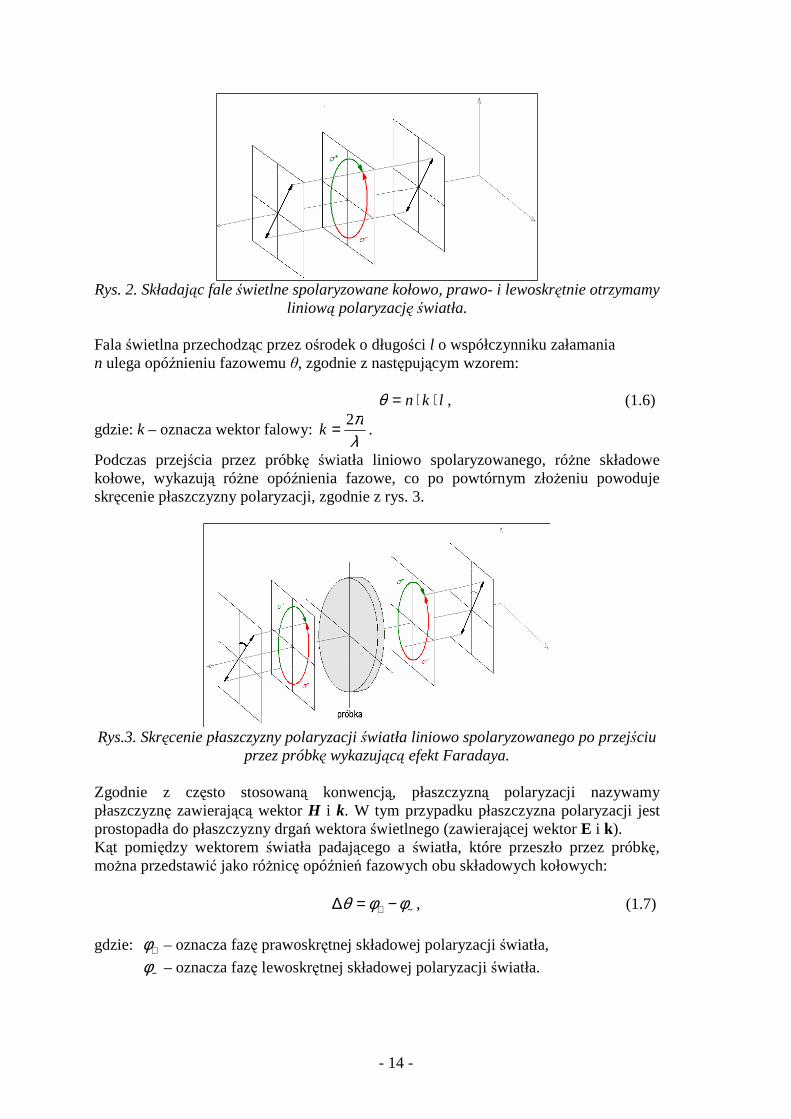
Światło spolaryzowane liniowo jest złoŜeniem – superpozycją składowych kołowych o prawoskrętnej polaryzacji kołowej +σ i lewoskrętnej polaryzacji kołowej
−σ o równych amplitudach, rotujących w przeciwnych kierunkach, co przedstawia rys.2.
- 14 -
Rys. 2. Składając fale świetlne spolaryzowane kołowo, prawo- i lewoskrętnie otrzymamy
liniową polaryzację światła.
Fala świetlna przechodząc przez ośrodek o długości l o współczynniku załamania n ulega opóźnieniu fazowemu θ, zgodnie z następującym wzorem: lkn ⋅⋅=θ , (1.6)
gdzie: k – oznacza wektor falowy: λπ2=k .
Podczas przejścia przez próbkę światła liniowo spolaryzowanego, róŜne składowe kołowe, wykazują róŜne opóźnienia fazowe, co po powtórnym złoŜeniu powoduje skręcenie płaszczyzny polaryzacji, zgodnie z rys. 3.
Rys.3. Skręcenie płaszczyzny polaryzacji światła liniowo spolaryzowanego po przejściu
przez próbkę wykazującą efekt Faradaya. Zgodnie z często stosowaną konwencją, płaszczyzną polaryzacji nazywamy płaszczyznę zawierającą wektor H i k. W tym przypadku płaszczyzna polaryzacji jest prostopadła do płaszczyzny drgań wektora świetlnego (zawierającej wektor E i k). Kąt pomiędzy wektorem światła padającego a światła, które przeszło przez próbkę, moŜna przedstawić jako róŜnicę opóźnień fazowych obu składowych kołowych: −+ −=∆ φφθ , (1.7) gdzie: +φ – oznacza fazę prawoskrętnej składowej polaryzacji światła,
−φ – oznacza fazę lewoskrętnej składowej polaryzacji światła.
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 15-
RóŜna prędkość propagacji kaŜdej ze składowych kołowych światła liniowo spolaryzowanego, powoduje róŜne wartości współczynników załamania światła tych
składowych (V
cn = ), co zgodnie z wzorami (1.6) i (1.7) powoduje, iŜ róŜnice opóźnień
moŜna przedstawić według następującego wzoru: ( )−+ −⋅⋅=∆ nnlkθ . (1.8)
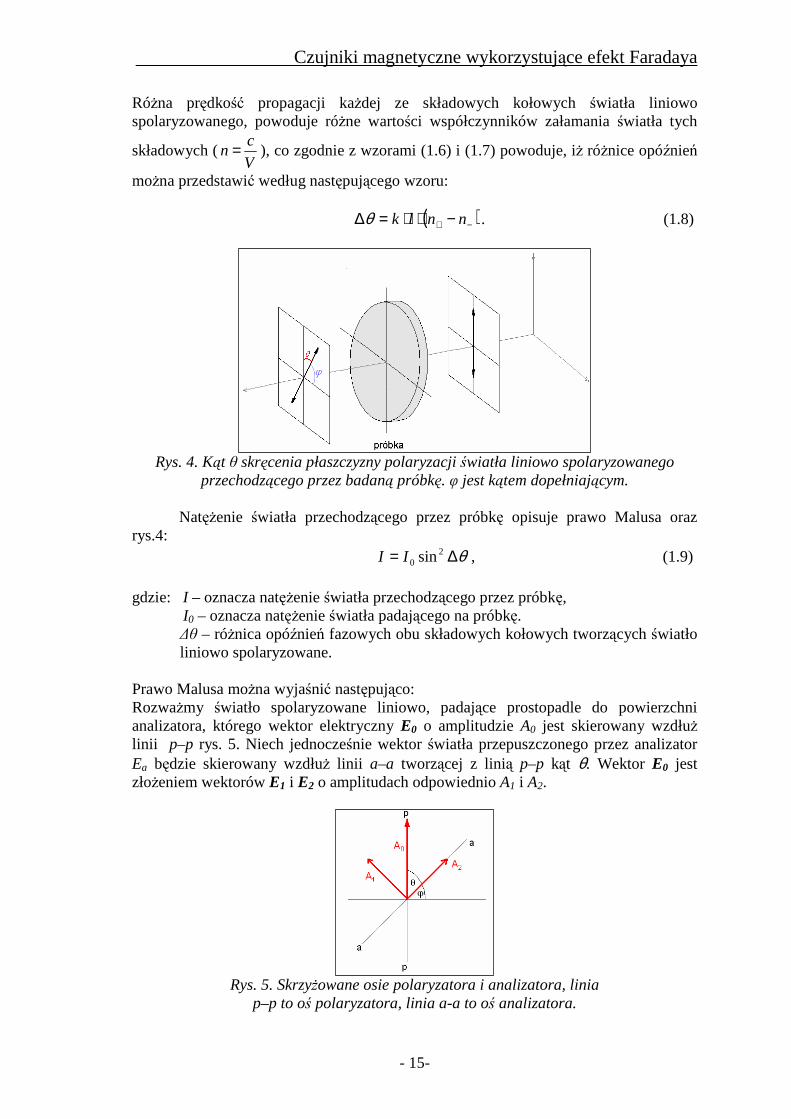
Rys. 4. Kąt θ skręcenia płaszczyzny polaryzacji światła liniowo spolaryzowanego
przechodzącego przez badaną próbkę. φ jest kątem dopełniającym. NatęŜenie światła przechodzącego przez próbkę opisuje prawo Malusa oraz rys.4: θ∆= 2
0 sinII , (1.9)
gdzie: I – oznacza natęŜenie światła przechodzącego przez próbkę, I0 – oznacza natęŜenie światła padającego na próbkę. ∆θ – róŜnica opóźnień fazowych obu składowych kołowych tworzących światło
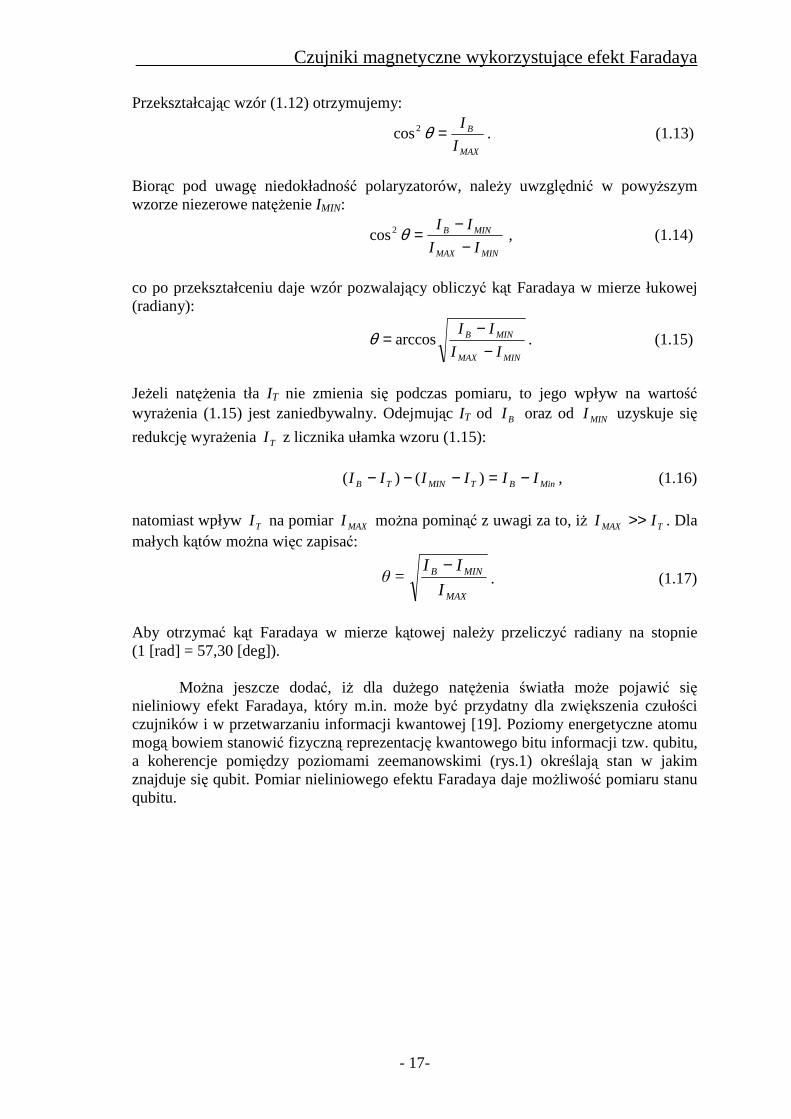
liniowo spolaryzowane. Prawo Malusa moŜna wyjaśnić następująco: RozwaŜmy światło spolaryzowane liniowo, padające prostopadle do powierzchni analizatora, którego wektor elektryczny E0 o amplitudzie A0 jest skierowany wzdłuŜ linii p–p rys. 5. Niech jednocześnie wektor światła przepuszczonego przez analizator Ea będzie skierowany wzdłuŜ linii a–a tworzącej z linią p–p kąt θ. Wektor E0 jest złoŜeniem wektorów E1 i E2 o amplitudach odpowiednio A1 i A2.
Rys. 5. SkrzyŜowane osie polaryzatora i analizatora, linia
p–p to oś polaryzatora, linia a-a to oś analizatora.

- 16 -
Fala, której wektor elektryczny E1 wykonuje drgania wzdłuŜ kierunku prostopadłego do a–a o amplitudzie θsin01 AA = nie przechodzi przez analizator, natomiast druga fala,
której wektor elektryczny E2 wykonuje drgania o amplitudzie θcos02 AA = wzdłuŜ
kierunku a–a całkowicie przechodzi przez ten analizator (zakładamy brak absorpcji). Tak więc:
θθπθ sin2
coscos 0002 AAAAA =
−=== . (1.10)
Obie wielkości są ze sobą związane prawem Malusa: ( ) θθ 2
0 cosII = , (1.11)
wzór (1.11) jest równowaŜny wzorowi (1.9). W niniejszej pracy pomiary kąta Faradaya wykonywano zgodnie z następującym schematem:
I. Aby obliczyć kąt skręcenia płaszczyzny światła w próbce, jako pierwsze mierzono natęŜenia światła przechodzące przez próbkę w zerowym polu magnetycznym, gdy osie polaryzatora i analizatora były ustawione równolegle względem siebie (kąt między nimi wynosił 0°). Tak wyznaczone maksymalne natęŜenie światła oznaczyliśmy jako IMAX.
PoniewaŜ stosowane były magnesy stałe, pomiar IMAX w zerowym polu magnetycznym nie był trywialny i wymagał zdejmowania ścianek z układem magnesów neodymowych i odsuwania ich dostatecznie daleko od próbki.
II. Kolejno wykonywano pomiar natęŜenia światła przechodzącego przez próbkę
(w zerowym polu magnetycznym), gdy osie polaryzatora i analizatora były skręcone pod kątem 90°. Oznaczyliśmy je jako IMIN. Zaznaczamy, Ŝe nie jest to natęŜenie tła. IMIN≠0 jest związane z niedoskonałością polaryzatora i analizatora i wpływa na wynik pomiarów (dla idealnych polaryzatorów IMIN byłoby równe zero).
III. Jako ostatnie mierzono natęŜenie światła przy zadanym polu magnetycznym BI ,
czyli z układem odpowiednio ustawionych magnesów neodymowych i nadal skrzyŜowanych polaryzatorem i analizatorem. Wartość BI >IMIN świadczy o istnieniu skręcenia płaszczyzny polaryzacji światła przechodzącego przez próbkę.
Przy powyŜszych oznaczeniach wzór Malusa przyjmie postać: θθ 22 cossin MAXMAXB III =∆= . (1.12)
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 17-
Przekształcając wzór (1.12) otrzymujemy:
MAX
B
I
I=θ2cos . (1.13)
Biorąc pod uwagę niedokładność polaryzatorów, naleŜy uwzględnić w powyŜszym wzorze niezerowe natęŜenie IMIN:
MINMAX
MINB
II
II
−−
=θ2cos , (1.14)
co po przekształceniu daje wzór pozwalający obliczyć kąt Faradaya w mierze łukowej (radiany):
MINMAX
MINB
II
II
−−
= arccosθ . (1.15)
JeŜeli natęŜenia tła IT nie zmienia się podczas pomiaru, to jego wpływ na wartość wyraŜenia (1.15) jest zaniedbywalny. Odejmując IT od BI oraz od MINI uzyskuje się
redukcję wyraŜenia TI z licznika ułamka wzoru (1.15): MinBTMINTB IIIIII −=−−− )()( , (1.16)
natomiast wpływ TI na pomiar MAXI moŜna pominąć z uwagi za to, iŜ TMAX II >> . Dla małych kątów moŜna więc zapisać:
MAX
MINB
I
II=θ
−. (1.17)
Aby otrzymać kąt Faradaya w mierze kątowej naleŜy przeliczyć radiany na stopnie (1 [rad] = 57,30 [deg]). MoŜna jeszcze dodać, iŜ dla duŜego natęŜenia światła moŜe pojawić się nieliniowy efekt Faradaya, który m.in. moŜe być przydatny dla zwiększenia czułości czujników i w przetwarzaniu informacji kwantowej [19]. Poziomy energetyczne atomu mogą bowiem stanowić fizyczną reprezentację kwantowego bitu informacji tzw. qubitu, a koherencje pomiędzy poziomami zeemanowskimi (rys.1) określają stan w jakim znajduje się qubit. Pomiar nieliniowego efektu Faradaya daje moŜliwość pomiaru stanu qubitu.

- 18 -
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 19-
2. Symulacje właściwości magnetycznych komory do wytwarzania pola magnetycznego.
Rozdział ten poświęcony jest modelowaniu właściwości magnetycznych zaprojektowanej komory do wytwarzania pola magnetycznego. Krótkie wprowadzenie zawiera opis programu FEMM, z którego korzystaliśmy w trakcie projektowania komory. Następnie przedstawiamy moŜliwości tego programu oraz ogólną metodykę postępowania podczas modelowania naszego zagadnienia. W podrozdziale 2.2 przedstawiamy wyniki symulacji rozkładu pola magnetycznego w komorze, które miały bezpośredni wpływ na jej ostateczną postać.
2.1. Wprowadzenie
FEMM (Finite Element Method Magnetics) jest pakietem programów rozwiązujących zagadnienia dwuwymiarowe (w tym osiowosymetryczne) z zakresu liniowej i nieliniowej magnetostatyki i magnetyzmu oraz liniowej elektrostatyki. Jest to program, który do symulacji i obliczeń wykorzystuje ogólne zasady elektromagnetyzmu. magnetycznych własności materiałów, a takŜe umoŜliwia obliczenia dla materiału o dowolnych właściwościach. Program jest dostępny na stronie domowej FEMM http://femm.foster-miller.com. Autorem programu jest David Meeker. Program działa pod: Windows 95, 98, ME, NT, 2000 i XP. Całość pakietu FEMM składa się z trzech części: • femm.exe. Posiada interfejs podobny do CADowskich co pozwala mu na dobre uwzględnienie nakreślenie geometrii zagadnienia. By ułatwić uŜytkownikowi stworzenie odpowiedniej geometrii istnieje moŜliwość zaimportowania plików Autocad DXF. Program femm.exe. złoŜony jest z dwóch głównych części:
• pre-procesora, który umoŜliwia określenie rodzaju zagadnienia, jego geometrię, rodzaj i właściwości występujących materiałów oraz warunki brzegowe.
• post-procesora, który umoŜliwia obejrzenie rozwiązania wygenerowanego przez fkern.exe lub belasolv.exe. Przykładowo, rozwiązanie problemu rozkładu indukcji magnetycznej moŜe zostać pokazane w formie mapy gęstości lub wykresu B(L), gdzie L jest jednostką długości. Program pozwala uŜytkownikowi zbadać pole magnetyczne w dowolnym punkcie, jak równieŜ wzdłuŜ dowolnie zdefiniowanej krzywej. • triangle.exe. Program wykonuje bardzo waŜne zadanie w procesie rozwiązywania problemu. Mianowicie dzieli on, często skomplikowany, obszar na duŜą liczbę obszarów o prostej geometrii (trójkąty). Ta, tzw. siatka, ułatwia i skraca czas obliczeń. Szczegółowy opis działania tegoŜ programu znajduje się w [23]. Autorem tego programu jest Jonathan Shewchuk. Program jest dostępny na stronie Carnegie - Mellon University lub Netlib. • fkern.exe.- dla zagadnień z dziedziny magnetyzmu • belasolv.exe - dla zagadnień z dziedziny elektrostatyki. KaŜdy z tych programów analizuje zestaw danych, które opisują zagadnienie. Następnie rozwiązuje stosowne równania Maxwella w celu otrzymania rozwiązania danego problemu. Więcej o programie FEMM moŜna przeczytać w [23].
- 20 -
2.1.1. Program FEMM a równania Maxwella.
Program FEMM rozwiązuje zagadnienia z dziedziny elektrostatyki oraz magnetyzmu w oparciu o równania Maxwella z pewnymi ograniczeniami. Przy rozwiązywaniu zagadnień z zakresu magnetyzmu, program rozwaŜa jedynie występujące pola magnetyczne ignorując przepływ prądów. Tak więc tym sposobem moŜliwe jest uzyskanie rozwiązań dla problemów tzw. „niskiej częstotliwości”. Z kolei rozwiązania zagadnień elektrostatycznych biorą pod uwagę przypadek odwrotny, w którym rozwaŜa się jedynie pole elektryczne a pole magnetyczne zaniedbuje się. Kolejnym ograniczeniem programu jest to, Ŝe zagadnienia, jakie moŜe on rozwiązać mogą być jedynie dwuwymiarowe. W związku z tematyką naszych badań (zagadnienie z dziedziny magnetyzmu), wykorzystywaliśmy jedynie część moŜliwości, jakie daje FEMM. Kolejne podrozdziały zawierają istotne informacje związane z modelowaniem naszego zagadnienia. Informacje potrzebne uŜytkownikowi, który chciałby zmierzyć się z problemem z dziedziny elektrostatyki znajdują się w pracach [23,24]. Dla naszego zagadnienia rozpatrywane są następujące równania: JH =×∇ , (2.1) 0=⋅∇ B . (2.2) Gdzie H to natęŜenie pola magnetycznego, B - indukcja magnetyczna, J to gęstość pola elektrycznego. Dla kaŜdego materiału występuje relacja pomiędzy B i H dana wzorem HB µ= . (2.3) Jeśli materiał jest nieliniowy (np. nasycone Ŝelazo, magnes alnico), przenikalność, µ jest funkcją B:
( )BH
B=µ . (2.4)
FEMM znajduje takie rozwiązanie (pole), które spełnia (2.1)-(2.3) przy wykorzystaniu wektora potencjału magnetycznego A. Potencjał magnetyczny A jest związany z indukcją magnetyczną B poprzez relację: AB ×∇= . (2.5) Dzięki (2.5) B zawsze spełnia (2.2). Wtedy (2.1) moŜna zapisać jako:
( ) JAB
=
×∇×∇
µ1
. (2.6)
Dla liniowego, izotropowego materiału przyjmując 0=⋅∇ A , równanie (2.6) redukuje się do:
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 21-
JA =∇− 21
µ. (2.7)
FEMM zachowuje konwencję (2.6), dzięki czemu moŜna szukać rozwiązań dla zagadnień magnetostatycznych z nieliniową relacją B – H.
2.1.2. Warunki brzegowe. Aby otrzymać poprawne rozwiązanie zagadnienia, naleŜy podać odpowiednią liczbę warunków brzegowych. Program FEMM zakłada trzy typowe warunki brzegowe, odpowiednie dla kaŜdego rodzaju zagadnienia: • Warunek brzegowy Dirichleta zakłada wartość potencjału A, jako jawnie zdefiniowaną na granicy, np. A = 0. Tego typu warunek brzegowy jest najczęściej uŜywany dla zagadnień magnetycznych, dla których wyznacza się A = 0 wzdłuŜ granicy, aby zachować postać indukcji magnetycznej na przecięciach granic. Dla większej pewności otrzymywanych wyników, podczas modelowania właściwości magnetycznych naszego układu, zastosowaliśmy warunek brzegowy Dirichleta. Jednak w naszym przypadku, ze względu na jarzmo zamykające linie indukcji, nie było to warunkiem koniecznym. • Warunek brzegowy Neumanna zakłada określoną wartość pochodnej cząstkowej potencjału A po normalnej do tej granicy wzdłuŜ granicy zagadnienia. W zagadnieniach
magnetycznych, jednorodny warunek brzegowy Neumanna 0=∂∂n
A jest zdefiniowany
wzdłuŜ granicy, aby "zmusić" strumień indukcji, by przechodził normalnie do granicy.
• Warunek brzegowy Robina zakłada 0=+∂∂
cAn
A i jest warunkiem mieszanym
pomiędzy warunkami brzegowymi Dirichleta i Neumanna. Ten warunek brzegowy jest najczęściej wykorzystywany w FEMM, gdy chcemy modelować pewne wielkości tak, jak gdyby znajdowały się one w nieograniczonym obszarze, choć z wiadomych względów obszar zagadnienia jest ograniczony. Jeśli Ŝadne warunki brzegowe jawnie nie są zdefiniowane, na kaŜdej granicy domyślnie zdefiniowany jest jednorodny warunek brzegowy Neumanna. Dla zagadnień magnetycznych, osiowosymetrycznych A=0 jest domyślnie definiowane na linii r=0. W tym przypadku, moŜna otrzymać prawidłowe rozwiązanie bez jawnego definiowania warunków brzegowych, dopóki granica zagadnienia leŜy wzdłuŜ r=0. Szczegółowa dyskusja postaci i zastosowania warunków brzegowych znajduje się w [23].
- 22 -
2.1.3. Definiowanie zagadnienia.
Pre-procesora uŜywa się do rysowania geometrii zagadnienia, definiowania właściwości materiałów oraz warunków brzegowych. Rysowanie geometrii zagadnienia zwykle składa się z czterech kroków:
1) Rysowanie punktów węzłowych. 2) Łączenie punktów węzłowych odcinkami lub łukami. 3) Dodawanie markerów do kaŜdego elementu modelu w celu zdefiniowania
własności materiału oraz rozmiarów siatki. 4) Określenia warunków brzegowych na granicach zagadnienia.
2.1.4. Generowanie rozwiązania zagadnienia.
Post-procesor pozwala na wygenerowanie siatki dla danego zagadnienia, rozwiązanie danego zagadnienia przez analizator fkern.exe oraz obejrzenie tegoŜ rozwiązania. Post-procesor zawsze działa w jednym z trzech trybów, w których uŜytkownik moŜe wskazać, jaki rodzaj rozwiązania go interesuje (rozwiązanie w punkcje, linii, powierzchni).
2.2. Wybór odpowiedniej konfiguracji jarzma komory.
Pierwszym zadaniem, do którego rozwiązania przyczynił się FEMM, był wybór odpowiedniej konfiguracji jarzma układu. Po wcześniejszym zaproponowaniu ogólnej budowy komory (jarzmo, nabiegunniki) naleŜało przeprowadzić symulację zachowania się indukcji magnetycznej B dla takiego układu, ze szczególnym zwróceniem uwagi na wielkość i jednorodność B w obszarze, w którym miałaby znajdować się próbka.
Opis poszczególnych elementów komory znajduje się w rozdziale 3. RozwaŜaliśmy dwie konfiguracje układu jarzma: konfigurację A (rys. 6) i konfigurację B (rys. 7). Konfiguracje róŜnią się jedynie połoŜeniem ścianek bocznych jarzma, wszystkie wymiary elementów składowych są identyczne. Zmieniając symetrię układu chcieliśmy sprawdzić jej wpływ na rozkład indukcji magnetycznej w komorze. Dla celów symulacyjnych zastosowaliśmy ten sam rodzaj nakładek na nabiegunniki dla obu konfiguracji. Odległość pomiędzy nakładkami jest w kaŜdym przypadku stała i wynosi 36mm.

Czujniki magnetyczne wykorzystujące efekt Faradaya
- 23-
Rys. 6. Przekrój podłuŜny komory do wytwarzania pola magnetycznego w konfiguracji A. Odległość pomiędzy nabiegunnikami wynosi 36mm.
Czerwona linia pokazuje tor wiązki źródła światła.
Rys. 7. Przekrój podłuŜny komory do wytwarzania pola magnetycznego w konfiguracji B. Odległość pomiędzy nabiegunnikami wynosi 36mm.
Czerwona linia pokazuje tor wiązki źródła światła.
- 24 -
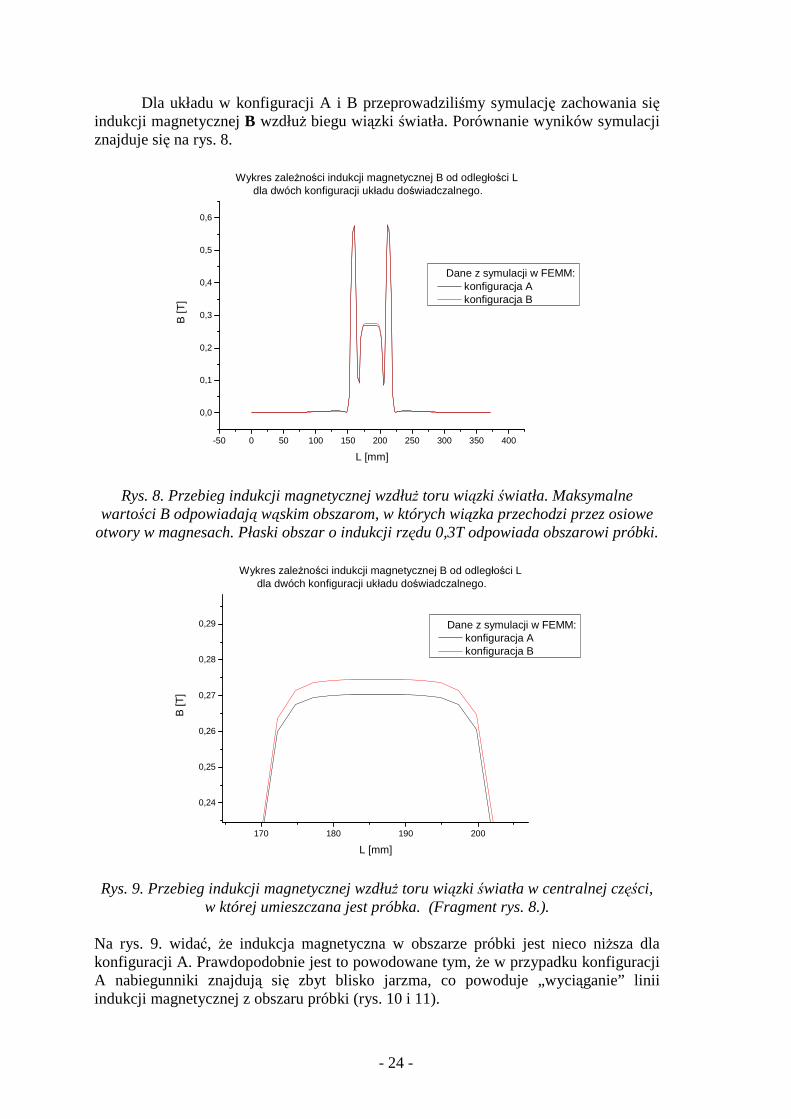
Dla układu w konfiguracji A i B przeprowadziliśmy symulację zachowania się indukcji magnetycznej B wzdłuŜ biegu wiązki światła. Porównanie wyników symulacji znajduje się na rys. 8.
-50 0 50 100 150 200 250 300 350 400
0,0
0,1
0,2
0,3
0,4
0,5
0,6
B [T
]
L [mm]
Dane z symulacji w FEMM: konfiguracja A konfiguracja B
Wykres zaleŜności indukcji magnetycznej B od odległości L dla dwóch konfiguracji układu doświadczalnego.
Rys. 8. Przebieg indukcji magnetycznej wzdłuŜ toru wiązki światła. Maksymalne
wartości B odpowiadają wąskim obszarom, w których wiązka przechodzi przez osiowe otwory w magnesach. Płaski obszar o indukcji rzędu 0,3T odpowiada obszarowi próbki.
170 180 190 200
0,24
0,25
0,26
0,27
0,28
0,29
B [T
]
L [mm]
Dane z symulacji w FEMM: konfiguracja A konfiguracja B
Wykres zaleŜności indukcji magnetycznej B od odległości L dla dwóch konfiguracji układu doświadczalnego.
Rys. 9. Przebieg indukcji magnetycznej wzdłuŜ toru wiązki światła w centralnej części,
w której umieszczana jest próbka. (Fragment rys. 8.).
Na rys. 9. widać, Ŝe indukcja magnetyczna w obszarze próbki jest nieco niŜsza dla konfiguracji A. Prawdopodobnie jest to powodowane tym, Ŝe w przypadku konfiguracji A nabiegunniki znajdują się zbyt blisko jarzma, co powoduje „wyciąganie” linii indukcji magnetycznej z obszaru próbki (rys. 10 i 11).
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 25-
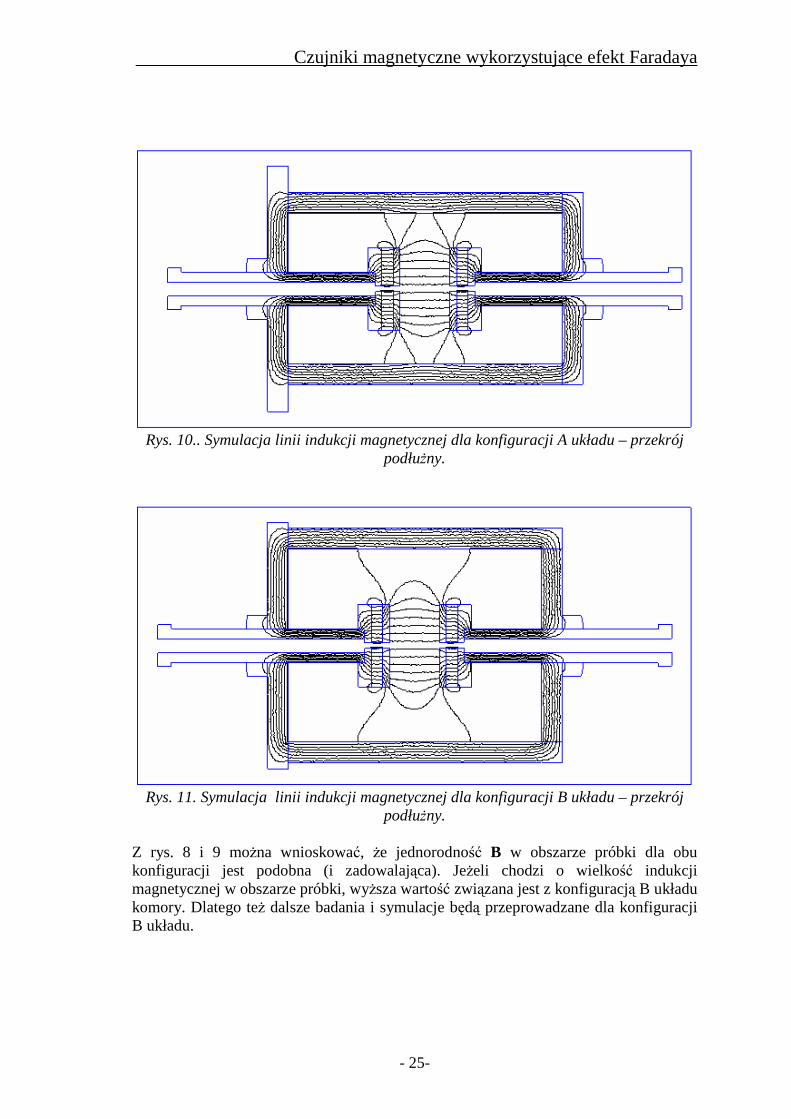
Rys. 10.. Symulacja linii indukcji magnetycznej dla konfiguracji A układu – przekrój
podłuŜny.
Rys. 11. Symulacja linii indukcji magnetycznej dla konfiguracji B układu – przekrój
podłuŜny. Z rys. 8 i 9 moŜna wnioskować, Ŝe jednorodność B w obszarze próbki dla obu konfiguracji jest podobna (i zadowalająca). JeŜeli chodzi o wielkość indukcji magnetycznej w obszarze próbki, wyŜsza wartość związana jest z konfiguracją B układu komory. Dlatego teŜ dalsze badania i symulacje będą przeprowadzane dla konfiguracji B układu.
- 26 -
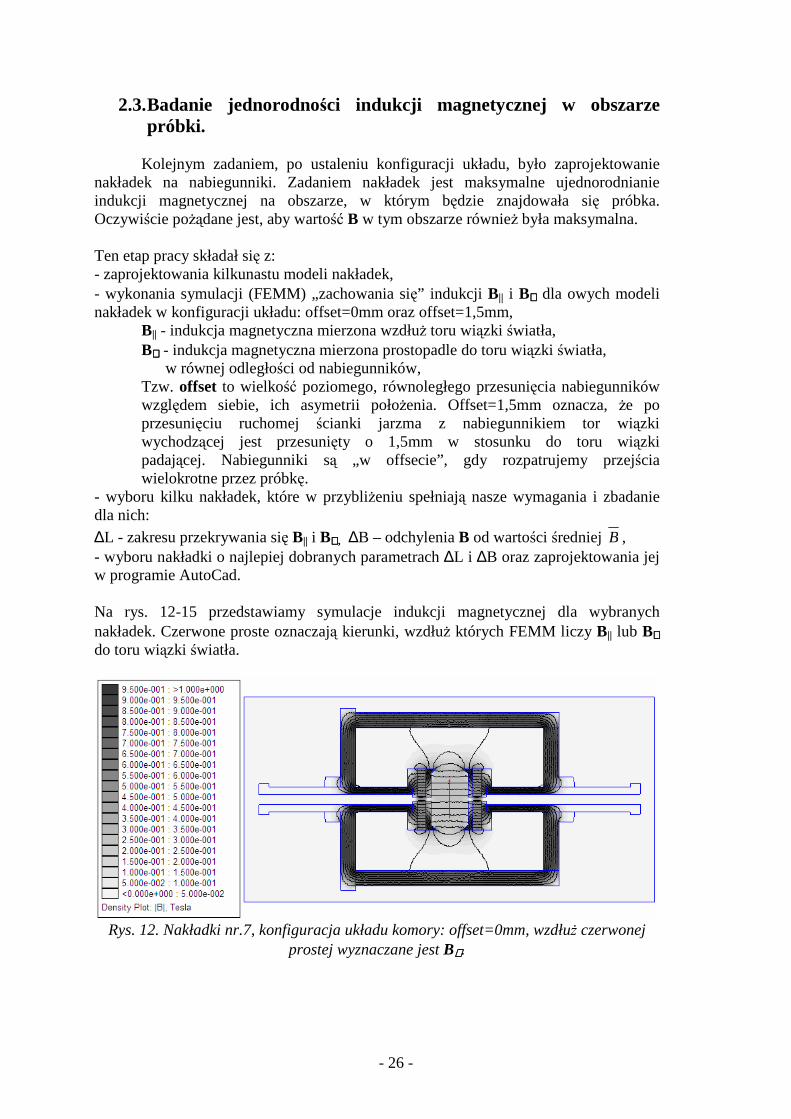
2.3. Badanie jednorodności indukcji magnetycznej w obszarze próbki.
Kolejnym zadaniem, po ustaleniu konfiguracji układu, było zaprojektowanie nakładek na nabiegunniki. Zadaniem nakładek jest maksymalne ujednorodnianie indukcji magnetycznej na obszarze, w którym będzie znajdowała się próbka. Oczywiście poŜądane jest, aby wartość B w tym obszarze równieŜ była maksymalna. Ten etap pracy składał się z: - zaprojektowania kilkunastu modeli nakładek, - wykonania symulacji (FEMM) „zachowania się” indukcji B|| i B⊥⊥⊥⊥ dla owych modeli nakładek w konfiguracji układu: offset=0mm oraz offset=1,5mm, B|| - indukcja magnetyczna mierzona wzdłuŜ toru wiązki światła, B⊥⊥⊥⊥ - indukcja magnetyczna mierzona prostopadle do toru wiązki światła, w równej odległości od nabiegunników, Tzw. offset to wielkość poziomego, równoległego przesunięcia nabiegunników względem siebie, ich asymetrii połoŜenia. Offset=1,5mm oznacza, Ŝe po przesunięciu ruchomej ścianki jarzma z nabiegunnikiem tor wiązki wychodzącej jest przesunięty o 1,5mm w stosunku do toru wiązki padającej. Nabiegunniki są „w offsecie”, gdy rozpatrujemy przejścia wielokrotne przez próbkę. - wyboru kilku nakładek, które w przybliŜeniu spełniają nasze wymagania i zbadanie dla nich: ∆L - zakresu przekrywania się B|| i B⊥⊥⊥⊥, ∆B – odchylenia B od wartości średniej B , - wyboru nakładki o najlepiej dobranych parametrach ∆L i ∆B oraz zaprojektowania jej w programie AutoCad. Na rys. 12-15 przedstawiamy symulacje indukcji magnetycznej dla wybranych nakładek. Czerwone proste oznaczają kierunki, wzdłuŜ których FEMM liczy B|| lub B⊥⊥⊥⊥ do toru wiązki światła.
Rys. 12. Nakładki nr.7, konfiguracja układu komory: offset=0mm, wzdłuŜ czerwonej
prostej wyznaczane jest B⊥⊥⊥⊥.
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 27-
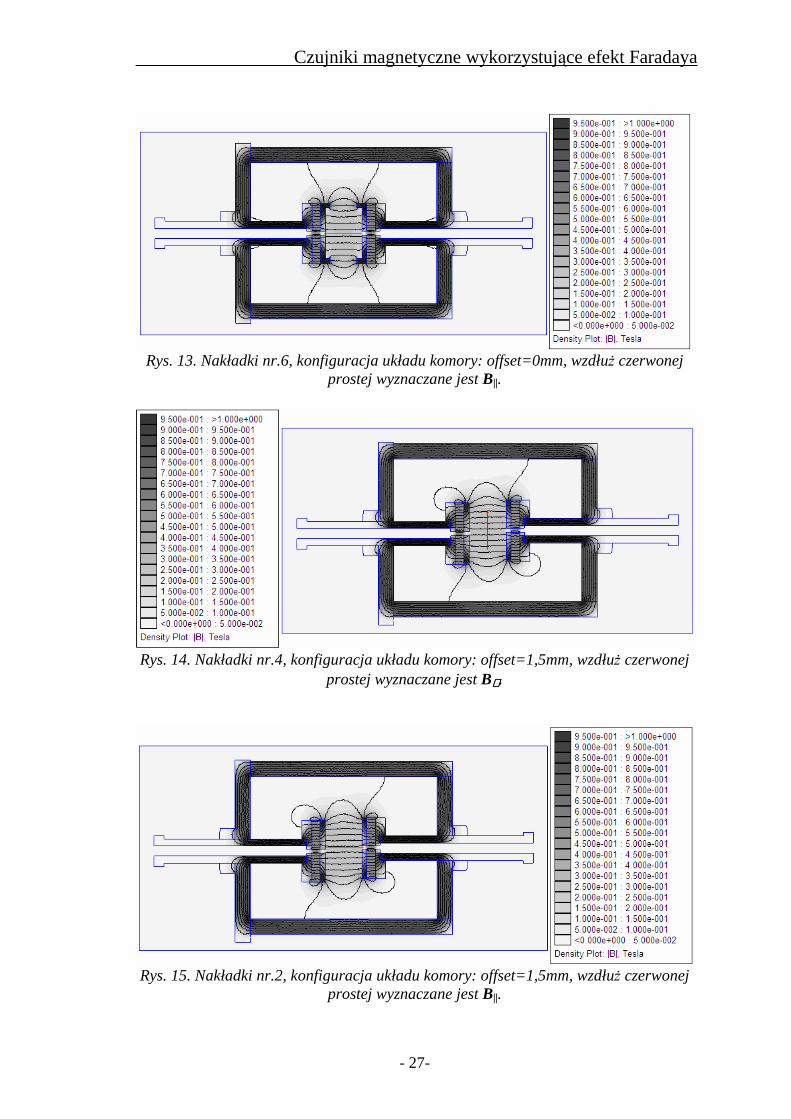
Rys. 13. Nakładki nr.6, konfiguracja układu komory: offset=0mm, wzdłuŜ czerwonej
prostej wyznaczane jest B||.
Rys. 14. Nakładki nr.4, konfiguracja układu komory: offset=1,5mm, wzdłuŜ czerwonej
prostej wyznaczane jest B⊥⊥⊥⊥.
Rys. 15. Nakładki nr.2, konfiguracja układu komory: offset=1,5mm, wzdłuŜ czerwonej
prostej wyznaczane jest B||.
- 28 -
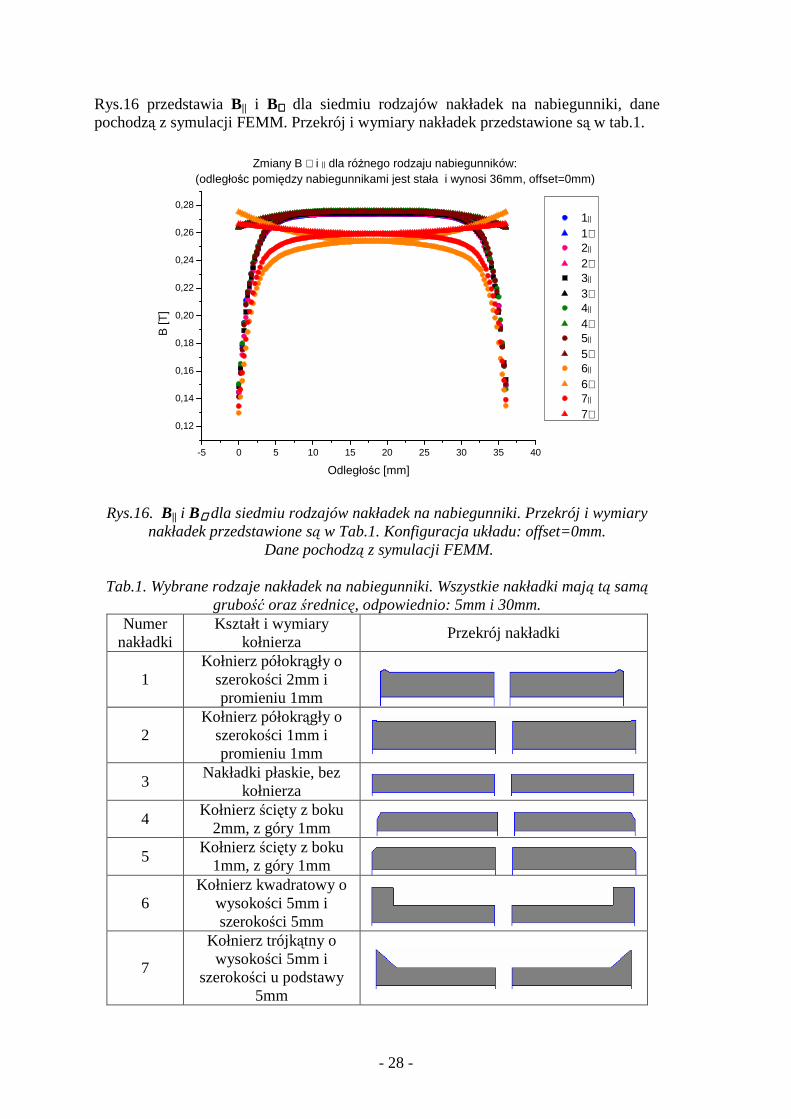
Rys.16 przedstawia B|| i B⊥⊥⊥⊥ dla siedmiu rodzajów nakładek na nabiegunniki, dane pochodzą z symulacji FEMM. Przekrój i wymiary nakładek przedstawione są w tab.1.
-5 0 5 10 15 20 25 30 35 40
0,12
0,14
0,16
0,18
0,20
0,22
0,24
0,26
0,28
B [T
]
Odległośc [mm]
1||
1⊥ 2||
2⊥ 3||
3⊥ 4||
4⊥ 5||
5⊥ 6||
6⊥ 7||
7⊥
Zmiany B ⊥ i || dla róŜnego rodzaju nabiegunników:(odległośc pomiędzy nabiegunnikami jest stała i wynosi 36mm, offset=0mm)
Rys.16. B|| i B⊥⊥⊥⊥ dla siedmiu rodzajów nakładek na nabiegunniki. Przekrój i wymiary
nakładek przedstawione są w Tab.1. Konfiguracja układu: offset=0mm. Dane pochodzą z symulacji FEMM.
Tab.1. Wybrane rodzaje nakładek na nabiegunniki. Wszystkie nakładki mają tą samą
grubość oraz średnicę, odpowiednio: 5mm i 30mm. Numer
nakładki Kształt i wymiary
kołnierza Przekrój nakładki
1 Kołnierz półokrągły o
szerokości 2mm i promieniu 1mm
2 Kołnierz półokrągły o
szerokości 1mm i promieniu 1mm
3 Nakładki płaskie, bez
kołnierza
4 Kołnierz ścięty z boku
2mm, z góry 1mm
5 Kołnierz ścięty z boku
1mm, z góry 1mm
6 Kołnierz kwadratowy o
wysokości 5mm i szerokości 5mm
7
Kołnierz trójkątny o wysokości 5mm i
szerokości u podstawy 5mm
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 29-
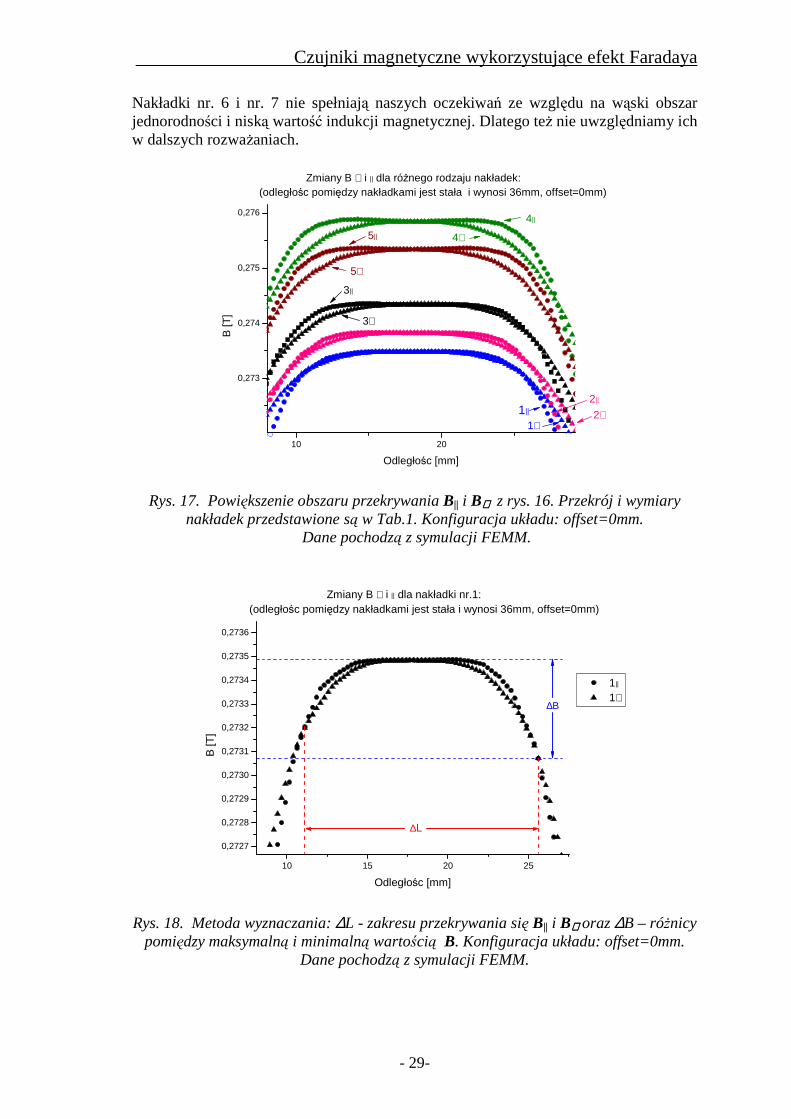
Nakładki nr. 6 i nr. 7 nie spełniają naszych oczekiwań ze względu na wąski obszar jednorodności i niską wartość indukcji magnetycznej. Dlatego teŜ nie uwzględniamy ich w dalszych rozwaŜaniach.
10 20
0,273
0,274
0,275
0,276
4⊥
4||
5⊥
5||
3⊥
3||
2⊥2||
B [T
]
Odległośc [mm]
Zmiany B ⊥ i || dla róŜnego rodzaju nakładek:(odległośc pomiędzy nakładkami jest stała i wynosi 36mm, offset=0mm)
1||
1⊥
Rys. 17. Powiększenie obszaru przekrywania B|| i B⊥⊥⊥⊥ z rys. 16. Przekrój i wymiary
nakładek przedstawione są w Tab.1. Konfiguracja układu: offset=0mm. Dane pochodzą z symulacji FEMM.
10 15 20 25
0,2727
0,2728
0,2729
0,2730
0,2731
0,2732
0,2733
0,2734
0,2735
0,2736
Zmiany B ⊥ i || dla nakładki nr.1:(odległośc pomiędzy nakładkami jest stała i wynosi 36mm, offset=0mm)
1||
1⊥
B [T
]
Odległośc [mm]
∆Β
∆L
Rys. 18. Metoda wyznaczania: ∆L - zakresu przekrywania się B|| i B⊥⊥⊥⊥ oraz ∆B – róŜnicy
pomiędzy maksymalną i minimalną wartością B. Konfiguracja układu: offset=0mm. Dane pochodzą z symulacji FEMM.
- 30 -
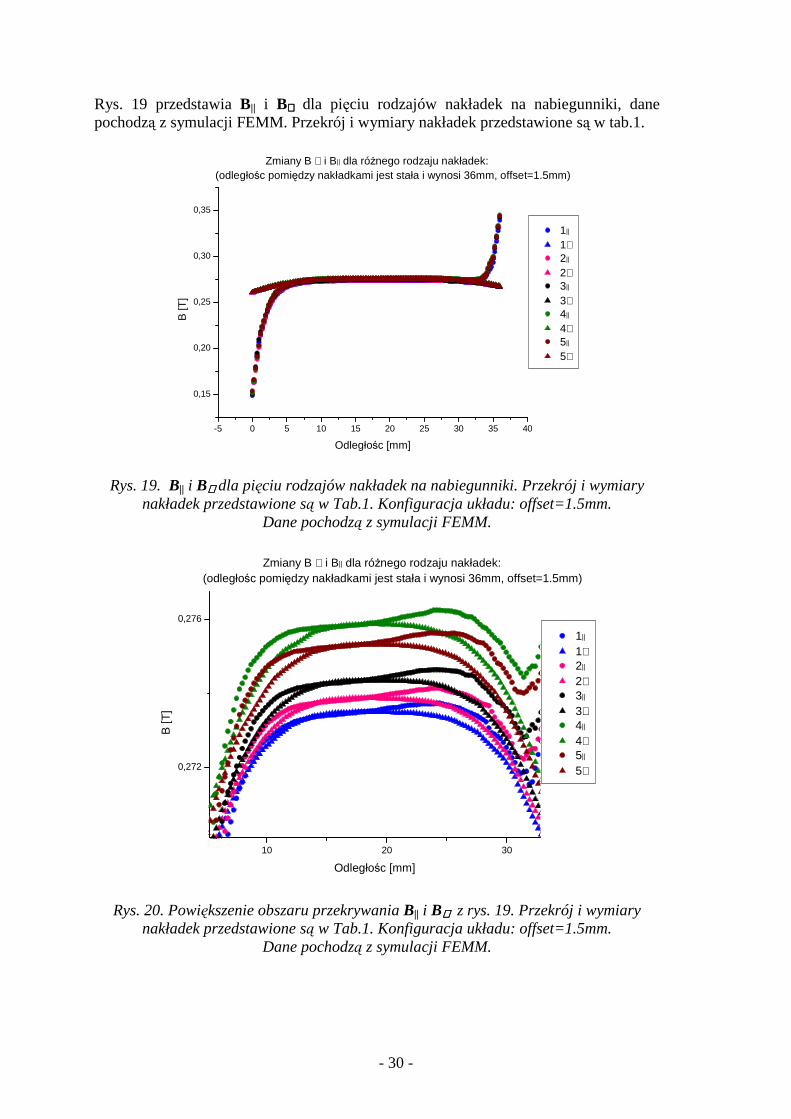
Rys. 19 przedstawia B|| i B⊥⊥⊥⊥ dla pięciu rodzajów nakładek na nabiegunniki, dane pochodzą z symulacji FEMM. Przekrój i wymiary nakładek przedstawione są w tab.1.
-5 0 5 10 15 20 25 30 35 40
0,15
0,20
0,25
0,30
0,35
Zmiany B ⊥ i B|| dla róŜnego rodzaju nakładek:(odległośc pomiędzy nakładkami jest stała i wynosi 36mm, offset=1.5mm)
1||
1⊥2||
2⊥3||
3⊥4||
4⊥5||
5⊥
B [T
]
Odległośc [mm]
Rys. 19. B|| i B⊥⊥⊥⊥ dla pięciu rodzajów nakładek na nabiegunniki. Przekrój i wymiary
nakładek przedstawione są w Tab.1. Konfiguracja układu: offset=1.5mm. Dane pochodzą z symulacji FEMM.
10 20 30
0,272
0,276
Zmiany B ⊥ i B|| dla róŜnego rodzaju nakładek:(odległośc pomiędzy nakładkami jest stała i wynosi 36mm, offset=1.5mm)
1||
1⊥2||
2⊥3||
3⊥4||
4⊥5||
5⊥
B [T
]
Odległośc [mm]
Rys. 20. Powiększenie obszaru przekrywania B|| i B⊥⊥⊥⊥ z rys. 19. Przekrój i wymiary
nakładek przedstawione są w Tab.1. Konfiguracja układu: offset=1.5mm. Dane pochodzą z symulacji FEMM.
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 31-
10 15 20 25 30
0,270
0,271
0,272
0,273
0,274
Zmiany B ⊥ i B|| dla nakładki nr.1:(odległośc pomiędzy nakładkami jest stała i wynosi 36mm, offset=1,5mm)
1||
1⊥
B [T
]
Odległośc [mm]
∆Β
∆L
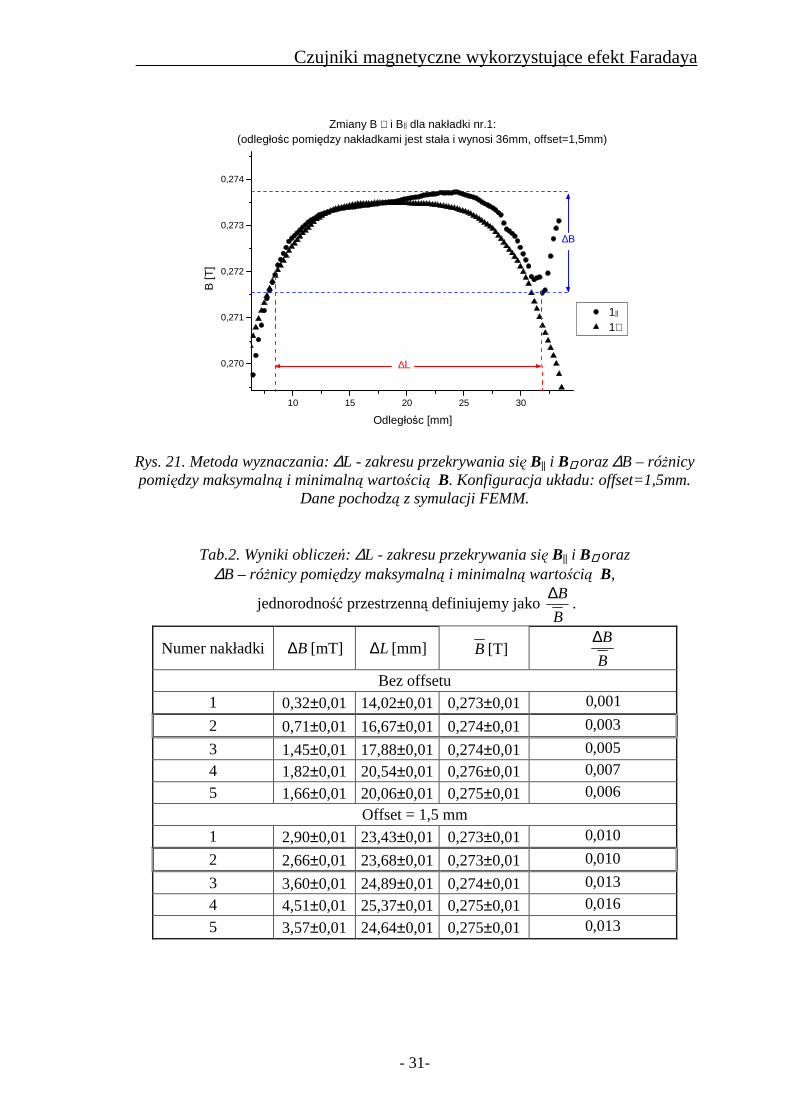
Rys. 21. Metoda wyznaczania: ∆L - zakresu przekrywania się B|| i B⊥⊥⊥⊥ oraz ∆B – róŜnicy pomiędzy maksymalną i minimalną wartością B. Konfiguracja układu: offset=1,5mm.
Dane pochodzą z symulacji FEMM.
Tab.2. Wyniki obliczeń: ∆L - zakresu przekrywania się B|| i B⊥⊥⊥⊥ oraz
∆B – róŜnicy pomiędzy maksymalną i minimalną wartością B,
jednorodność przestrzenną definiujemy jako B
B∆.
Numer nakładki B∆ [mT] L∆ [mm] B [T] B
B∆
Bez offsetu 1 0,32±0,01 14,02±0,01 0,273±0,01 001,0
2 0,71±0,01 16,67±0,01 0,274±0,01 003,0
3 1,45±0,01 17,88±0,01 0,274±0,01 005,0
4 1,82±0,01 20,54±0,01 0,276±0,01 007,0
5 1,66±0,01 20,06±0,01 0,275±0,01 006,0
Offset = 1,5 mm 1 2,90±0,01 23,43±0,01 0,273±0,01 010,0
2 2,66±0,01 23,68±0,01 0,273±0,01 010,0
3 3,60±0,01 24,89±0,01 0,274±0,01 013,0
4 4,51±0,01 25,37±0,01 0,275±0,01 016,0
5 3,57±0,01 24,64±0,01 0,275±0,01 013,0
- 32 -
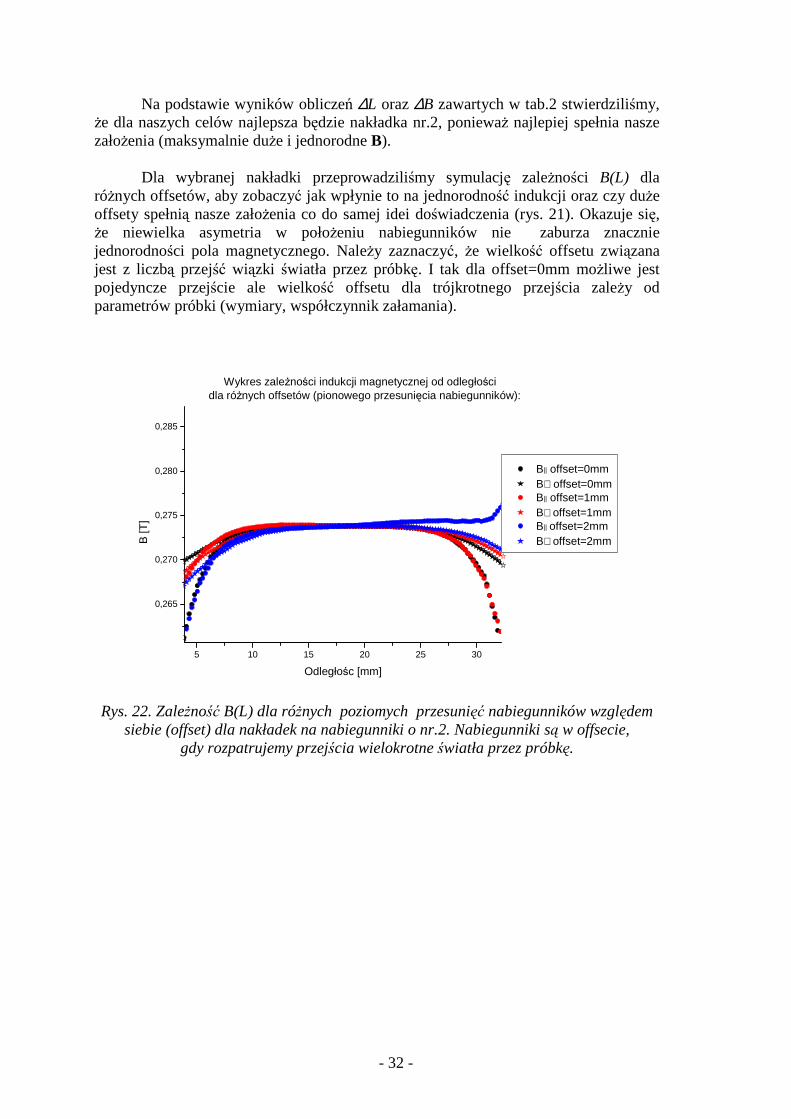
Na podstawie wyników obliczeń ∆L oraz ∆B zawartych w tab.2 stwierdziliśmy, Ŝe dla naszych celów najlepsza będzie nakładka nr.2, poniewaŜ najlepiej spełnia nasze załoŜenia (maksymalnie duŜe i jednorodne B).
Dla wybranej nakładki przeprowadziliśmy symulację zaleŜności B(L) dla róŜnych offsetów, aby zobaczyć jak wpłynie to na jednorodność indukcji oraz czy duŜe offsety spełnią nasze załoŜenia co do samej idei doświadczenia (rys. 21). Okazuje się, Ŝe niewielka asymetria w połoŜeniu nabiegunników nie zaburza znacznie jednorodności pola magnetycznego. NaleŜy zaznaczyć, Ŝe wielkość offsetu związana jest z liczbą przejść wiązki światła przez próbkę. I tak dla offset=0mm moŜliwe jest pojedyncze przejście ale wielkość offsetu dla trójkrotnego przejścia zaleŜy od parametrów próbki (wymiary, współczynnik załamania).
5 10 15 20 25 30
0,265
0,270
0,275
0,280
0,285
B|| offset=0mm B⊥ offset=0mm B|| offset=1mm B⊥ offset=1mm B|| offset=2mm B⊥ offset=2mmB
[T]
Odległośc [mm]
Wykres zaleŜności indukcji magnetycznej od odległości dla róŜnych offsetów (pionowego przesunięcia nabiegunników):
Rys. 22. ZaleŜność B(L) dla róŜnych poziomych przesunięć nabiegunników względem
siebie (offset) dla nakładek na nabiegunniki o nr.2. Nabiegunniki są w offsecie, gdy rozpatrujemy przejścia wielokrotne światła przez próbkę.
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 33-
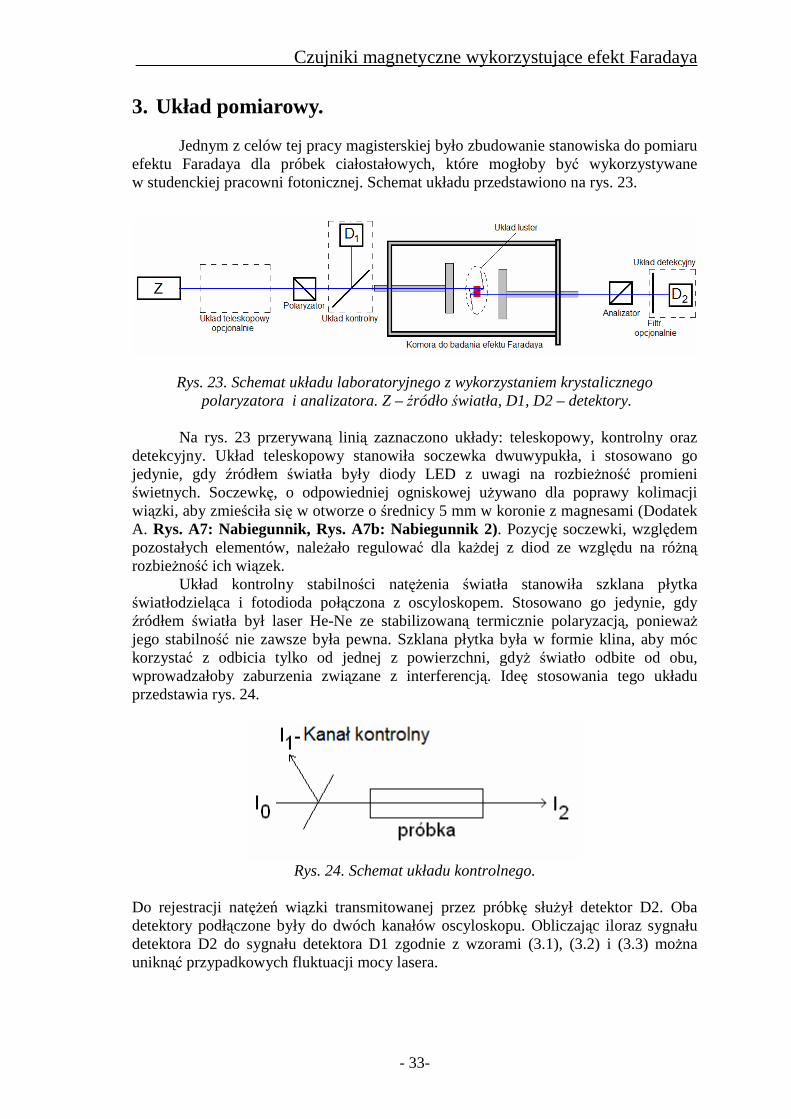
3. Układ pomiarowy. Jednym z celów tej pracy magisterskiej było zbudowanie stanowiska do pomiaru efektu Faradaya dla próbek ciałostałowych, które mogłoby być wykorzystywane w studenckiej pracowni fotonicznej. Schemat układu przedstawiono na rys. 23.
Rys. 23. Schemat układu laboratoryjnego z wykorzystaniem krystalicznego polaryzatora i analizatora. Z – źródło światła, D1, D2 – detektory.
Na rys. 23 przerywaną linią zaznaczono układy: teleskopowy, kontrolny oraz
detekcyjny. Układ teleskopowy stanowiła soczewka dwuwypukła, i stosowano go jedynie, gdy źródłem światła były diody LED z uwagi na rozbieŜność promieni świetnych. Soczewkę, o odpowiedniej ogniskowej uŜywano dla poprawy kolimacji wiązki, aby zmieściła się w otworze o średnicy 5 mm w koronie z magnesami (Dodatek A. Rys. A7: Nabiegunnik, Rys. A7b: Nabiegunnik 2). Pozycję soczewki, względem pozostałych elementów, naleŜało regulować dla kaŜdej z diod ze względu na róŜną rozbieŜność ich wiązek.
Układ kontrolny stabilności natęŜenia światła stanowiła szklana płytka światłodzieląca i fotodioda połączona z oscyloskopem. Stosowano go jedynie, gdy źródłem światła był laser He-Ne ze stabilizowaną termicznie polaryzacją, poniewaŜ jego stabilność nie zawsze była pewna. Szklana płytka była w formie klina, aby móc korzystać z odbicia tylko od jednej z powierzchni, gdyŜ światło odbite od obu, wprowadzałoby zaburzenia związane z interferencją. Ideę stosowania tego układu przedstawia rys. 24.
Rys. 24. Schemat układu kontrolnego.
Do rejestracji natęŜeń wiązki transmitowanej przez próbkę słuŜył detektor D2. Oba detektory podłączone były do dwóch kanałów oscyloskopu. Obliczając iloraz sygnału detektora D2 do sygnału detektora D1 zgodnie z wzorami (3.1), (3.2) i (3.3) moŜna uniknąć przypadkowych fluktuacji mocy lasera.
- 34 -
02 II α= , (3.1)
01 II β= , (3.2)
0
0
1
2
I
I
I
I
βα= , (3.3)
gdzie: 2I - natęŜenie światła rejestrowane przez detektor D2,
1I - natęŜenie światła rejestrowane przez detektor D1,
0I - natęŜenie wiązki laserowej.
α - straty natęŜenia światła po przejściu przez płytkę i próbkę, β - współczynnik odbicia od płytki. Układ detekcyjny stanowiła fotodioda D2 i filtr osłabiający, który stosowano, aby uniknąć nasycenia fotodiody przez laser 532 nm (druga harmoniczna lasera Nd:YAG). Aby fotodioda pracowała w obszarze liniowym, stosowano filtr osłabiający transmisję światła do 1% . W skład stanowiska wchodziły następujące elementy: 1. Źródła światła:
a. Lasery: He – Ne ze stabilizowaną termicznie polaryzacją (dł. fali 633 nm), półprzewodnikowy (dł. fali 650 nm), półprzewodnikowy GaN (dł. fali 413 nm),
Nd:YAG z podwajaniem częstości (dł. fali 532 nm). b. Diody LED: Niebieska (dł. fali 468 nm), Zielona (dł. fali 529 nm), Czerwona (dł. fali 628 nm).
2. Układ teleskopowy (opcjonalnie) – soczewka płasko-wypukła. 3. Układ kontrolny D1: a. Szklana płytka. b. Fotodioda (opcjonalnie dla lasera He-Ne) połączona z oscyloskopem. 4. Magnetyczna, stalowa komora do badania efektu Faradaya 5. Układ detekcyjny D2:
a. Filtr osłabiający (opcjonalnie). b. Fotodioda (opcjonalnie) połączona z oscyloskopem. c. Miernik mocy.
6. Inne: a. Dwa krystaliczne polaryzatory.

Czujniki magnetyczne wykorzystujące efekt Faradaya
- 35-
3.1. Komora do wytwarzania pola magnetycznego i układ mocowania próbki.
Jednym z głównych celów tej pracy magisterskiej było zaprojektowanie i skonstruowanie urządzenia do badania efektu Faradaya w próbkach ciałostałowych. Jako źródło pola magnetycznego uŜywaliśmy magnesów neodymowych, których specyfikacja techniczna oraz zalety, dzięki którym je wybrano są opisane w rozdziale 3.3. Podczas projektowania braliśmy takŜe pod uwagę: prostotę wykonania, funkcjonalność (lekkość oraz nieskomplikowaną obsługę) oraz uniwersalność (róŜne rozmiary próbek).
Rys. 25. Komora do badania efektu Faradaya.
Rys. 26. Kolejne fazy projektowania komory do badania efektu Faradaya.
- 36 -
Projektowanie wykonywaliśmy w programie AutoCAD wersji 2005 Firmy Autodesk, Inc. Ostateczny projekt przedstawia rys. 25. Jest on wynikiem analizy trzech wcześniejszych projektów, przedstawionych na rys. 26. UŜyte kolory nie reprezentują konkretnego materiału a jedynie grupę materiałów do której przynaleŜą: kolory ciemne reprezentują stal, a inne kolory aluminium (dural)3 bądź mosiądz4. Na rys. 26 przedstawiamy kolejne fazy projektowania komory: projekt A został odrzucony z powodu niesymetryczności układu oraz zbyt duŜej trudności w wykonaniu, projekt B został odrzucony z powodu niesymetryczności, jego zmodyfikowaną wersję przedstawia projekt C. Projekt C nie uwzględniał pionowej symetrii oraz nie zapewniał dobrej stabilności stolika obrotowego. Niestabilność stolika obrotowego wyeliminowaliśmy poprzez zastosowanie szyn i płóz (Dodatek A: rys. A15: Szyna 1, rys. A16: Szyna 2), po których posuwał się stolik przesuwny oraz (Dodatek A: rys. A18: Podkładka, rys. A19: Tuleja). Aby zapewnić symetrię pionową zastosowaliśmy kołnierze mocowane na kołkach do kaŜdej ze ścianek bocznych (Dodatek A: rys. 2b: Kołnierz ściana przednia i tylnia, rys. A3b: Kołnierz ściana lewa, rys. A4b: Kołnierz ściana prawa). W celu polepszenia warunków pracy (szybsze ściąganie ścianek z nabiegunnikami) postanowiliśmy przenieść cały mechanizm obrotu stolika (Dodatek A: rys. A14: Listewka oraz rys. A17: Okno) ze ściany lewej na ścianę przednią. Natomiast w celu poprawienia jednorodności przestrzennej pola magnetycznego wykonano nabiegunniki zgodnie z symulacjami programu FEMM – podrozdział 2.3. Ostateczną wersję przedstawia rys. 25. Po zatwierdzeniu projektu przekazaliśmy go do wykonania w warsztacie mechanicznym.
PoniŜej przedstawiamy listę elementów wchodzących w skład komory do wytwarzania pola magnetycznego i układu mocowania próbki. Pogrubioną czcionką oznaczyliśmy pełną nazwę rysunku, gdzie oznaczenie A wskazuje na to, Ŝe projekt rysunku znajduje się w dodatku A. Numer przy literze A oznacza numer rysunku. Litera b oznacza ulepszone elementy konstrukcyjne (wykonane z nowego materiału lub jedynie nieznacznie zmodyfikowane).
W skład komory wchodzą:
1. Elementy wykonane z stali: a) Sześć ścian stanowiących obudowę w kształcie prostopadłościanu, w tym ściana
prawa posiada moŜliwość przesuwania się względem przedniej i tylnej ściany. Rysunki A1: Ściana dolna, Rysunek A2: Ściany przednia i tylna, Rysunek A3: Ściana lewa, Rysunek A4: Ściana prawa, Rysunek A5: Pokrywa, Rysunek A1b: Ściana dolna. (Ściana zawiera nowy rozstaw otworów), Rysunek 2b: Kołnierz ściana przednia i tylnia, Rysunek A3b: Kołnierz ściana lewa, Rysunek A4b: Kołnierz ściana prawa.
b) Dwie korony na dwanaście magnesów kaŜda. Rysunek A6: Korona, Rysunek A6b: Korona2.
c) Dwa nabiegunniki przylegające do kaŜdej z koron. Rysunek A7: Nabiegunnik, Rysunek A7b: Nabiegunnik 2.
d) Dwie śruby wkręcane w prawą i lewą ścianę, których utrzymują korony oraz pozwalają na wzrost natęŜenia pola magnetycznego poprzez zbliŜenie do siebie koron lub zmniejszenie pola poprzez ich oddalenie. Rysunek A8: Głowica.
3 Dural – stop aluminium i innych metali takich jak Cu, Mn, Mg, Si Fe w łącznej zawartości do 8%. 4 Mosiądz – stop zawierający do 40% cynku reszta to miedz.
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 37-
2. Elementy wykonane z aluminium: a) Stolik przesuwny, który pozwala na przesuwanie próbką w pozycji równoległej
do koron i badania wpływu róŜnych połoŜeń na efekt Faradaya. Rysunek A9: Stolik przesuwny.
b) Dwa stoliki obrotowe w formie współśrodkowych walców5, które wraz z stolikami z punktu 2c i lustrami stanowią układ pozwalający zwielokrotnić efekt Faradaya. Rysunek A10: Obejma stolika obrotowego. Rysunek A11: Dwa stoliki.
c) Trzy stoliki w formie prostopadłościanów na próbki o długościach do 4,5mm, do 17mm oraz do 27mm z wyfrezowanymi dwiema szczelinami na lustra.6 Rysunek A12: Stolik 4,5mm. Rysunek A13: Stolik 17mm. Rysunek A11: Dwa stoliki.
d) Listewka przymocowana do ściany spodniej, na której przesuwa się stolik 2a. Rysunek A14: Listewka.
e) Dwie szyny, przymocowane do przedniej i tylniej ściany pozwalające na przesuwanie stolikiem względem koron. Rysunek A15: Szyna1. Rysunek A16: Szyna2.
f) Dźwignia umocowana do stolika 2b, umoŜliwiająca precyzyjne ustawienie kąta obrotu stolika z punktu 2b. Rysunek A14: Listewka.
g) Okno przymocowane do ściany przedniej, do którego ścianek bocznych przymocowano śrubę mikrometryczną oraz spręŜynę dociskającą dźwignię 2e. Rysunek A17: Okno.
h) Aluminiowa podkładka na czterech tulejach pod która znajduje się stolik obrotowy 2b. Rysunek A18: Podkładka. Rysunek A19: Tuleja.
3. Elementy wykonane z mosiądzu i stali nierdzewnej: a) Gwintowany pręt ze stali nierdzewnej nieruchomo zamocowany w stoliku
przesuwnym o średnicy 6mm i długości 150mm. b) MosięŜna moletowana śruba z gwintowanym otworem umieszczona
w wyfrezowanym gnieździe przy lewej ścianie, przez którą przechodzi pręt 3a, umoŜliwia przesuwanie stolika 2a pomiędzy koronami 1b. Rysunek A20: Śruba moletowana.
c) Dwa mosięŜne uchwyty mocujące śrubę 3b przytwierdzone do lewej ściany za pomocą mosięŜnych śrub na śrubokręt płaski. Rysunek A20: Śruba moletowana.
d) Dwie płozy wykonane ze spręŜynującej mosięŜnej blaszki w kształcie wąsów przymocowane dwiema śrubami ze stali nierdzewnej do stolika 2a, umoŜliwiające przesuw bez luzów stolika 2a pod szynami 2e pomiędzy koronami 1b.
e) 12 śrub stoŜkowych skręcających ścianki 1a.
Elementy stalowe pełnią rolę jarzma zamykającego linie pola magnetycznego (strumień magnetyczny) wytworzonego przez magnesy neodymowe. Komorę moŜna było wykonać z alnico, które posiada właściwości ferromagnetyczne lepsze od stali niskowęglowej. Jedyną przeszkodą była cena i ograniczony dostęp do materiału.
5 Walce moŜna obracać o duŜe kąty niezaleŜnie względem siebie, aby wykonywać obrót o małe kąty, naleŜy je ze sobą połączyć poprzez dokręcenie niewielkiej moletkowanej śruby przymocowanej do zewnętrznego walca. 6 Stolik 2c przymocowany jest do stolika 2b za pomocą mosięŜnych bolców, który przymocowany jest do stolika 2a za pomocą trzpienia wewnętrznego stolika 2b wchodzącego w stolik 2a.

- 38 -
Nie było realne wykonanie komory ze stali krzemowej, poniewaŜ standardowo produkowana jest ona w formie blach o grubości do kilku mm. Kolejnym minusem jest jej duŜa kruchość. Zdecydowaliśmy się na wykonanie komory ze stali węglowej, którą poddaliśmy wygrzewaniu dla zmniejszenia stęŜenia węgla w materiale. Stal jest materiałem ferromagnetycznym miękkim to znaczy posiada domeny magnetyczne, czyli obszary wykazujące samoistne i spontaniczne namagnesowanie w wyniku wzajemnego oddziaływania momentów magnetycznych poszczególnych atomów. Namagnesowanie to znika po usunięciu zewnętrznego źródła pola magnetycznego zachowując jedynie namagnesowanie resztkowe znacznie mniejsze od maksymalnego. W odpowiednich warunkach termicznych moŜna przeprowadzić ferromagnetyk w paramagnetyk powyŜej temperatury Curie, która dla Ŝelaza α7 wynosi 1043K. Elementy aluminiowe, bądź mosięŜne utrzymują próbkę i wraz z układem dwóch równoległych luster, pozwalają na ustawianie kąta obrotu stolika. Ścianki przedstawione na rys.25 przymocowano do siebie za pomocą śrub ze stali nierdzewnej8. NaleŜy przypomnieć, iŜ aluminium, mosiądz i stal nierdzewna są materiałami paramagnetycznymi, czyli nie wytwarzają, nie przewodzą oraz nie zaburzają pola magnetycznego. Ponadto charakteryzują się one dobrą odpornością na korozję atmosferyczną.
KaŜdy z elementów stalowych otrzymano w procesie frezowania9. W celu zwiększenia własności ferromagnetycznych, czyli poszerzenia pętli histerezy10 oraz zniesieniu napręŜeń mechanicznych powstałych podczas obróbki skrawaniem, kaŜdy z elementów poddano procesowi wygrzewania, który równieŜ zmniejsza zawartość węgla w materiale z 2% atomowych do około 0,8% atomowego. Proces wygrzewania elementów stalowych odbywał się w piecu oporowym według określonego cyklu składającego się z trzech bezpośrednio po sobie następujących faz. Dla małych elementów były to trzy godziny rozgrzewania od temperatury pokojowej do temperatury 1000 K11, utrzymywaniu zadanej temperatury przez dwie godziny, a następnie swobodnym studzeniu przy otwartej zasuwie pieca. Kolejne kroki dobierane były ze względu na wielkość i ilość wygrzewanego materiału. Przy wygrzewaniu ścian komory czas rozgrzewania był dłuŜszy i wynosił około czterech godzin, a stała temperatura utrzymywana była przez trzy godziny.
Aby zapobiec odbiciu światła od powierzchni, polepszyć walory estetyczne i zabezpieczyć przed korozją elementy te poddano procesowi czernienia. Proces czernienia stali polegał na umieszczeniu stalowych elementów we wrzącej kąpieli wodnego roztworu azotanu(III) sodu 2NaNO i wodorotlenku sodu NaOH przez około 10-20 min w zaleŜności od rozmiarów czernionych elementów. Następnie wyjmowano
7 śelazo α (odmiana wysokotemperaturowa to Ŝelazo α(δ)) jest jedynym gatunkiem Ŝelaza będącym ferromagnetykiem. Inna odmiana Ŝelaza to Ŝelazo γ. Przemiana alotropowa Ŝelaza α w Ŝelazo γ zachodzi w temperaturze 996K przy ogrzewaniu lub 801K przy schładzaniu. 8 Stal nierdzewna (INOX) – stal węglowa zawierająca 12-25% Cr. 9 Frezowanie – rodzaj obróbki skrawaniem, w którym nóŜ – frez zdejmuje naddatek materiału obracając się w płaszczyźnie prostopadłej do osi posuwu z jednoczesnym ruchem posuwnym. 10 Pętla histerezy to zamknięta krzywa opisująca zmiany indukcji magnetycznej B lub polaryzacji J w materiale ferromagnetycznym, w funkcji zmian natęŜenia zewnętrznego pola magnetycznego H. Szeroka pętla histerezy charakteryzuje materiały magnetycznie twarde (magnesy), natomiast wąska pętla histerezy - materiały magnetycznie miękkie (na przykład stal). 11 30 stopni powyŜej przemiany austenitycznej dla stali węglowej, która jest przykładem przemiany bezdyfuzyjnej polegającej na rozpadzie austenitu na mieszaninę eutektoidalną ferrytu i cementytu.
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 39-
je z kąpieli i opłukiwano pod bieŜącą wodą by pozbyć się zanieczyszczeń. W celu nadania szklistej powierzchni zanurzano je w oleju. Aluminiowe kształtki wytwarzano przez frezowanie i podobnie jak elementy stalowe, czerniono przez anodowanie. Anodowanie polega na wytworzeniu na powierzchni materiału zabezpieczającej warstewki tlenku. KaŜdy z elementów podłączany był jako anoda do napięcia 12 V na czas około dwóch godzin. W tym czasie, wytwarzający się tlen wchodził w reakcję chemiczną z aluminium tworząc cienką powłokę. Jako roztwór elektrolitu stosowano kwas siarkowy(VI) z dodatkiem czarnego, matowego barwnika organicznego słuŜącego do farbowania tkanin. Procesy wygrzewania, czernienia i anodowania wykonane zostały przez Warsztat Mechaniczny IF UJ.
3.2. Układ dwóch równoległych luster zwielokratniających liczbę przejść światła przez próbkę.
Aby umoŜliwi ć wielokrotne przejścia światła przez próbkę szklaną zastosowano
układ dwóch równoległych względem siebie luster. Lustra otrzymano poprzez naparowanie aluminium na szklaną płytkę o wymiarach: 55x40x5 w komorze próŜniowej (w Pracowni Naparowania PróŜniowego IF UJ). Krawędzie luster były odpowiednio zeszlifowane, aby moŜna było je moŜliwie blisko przysunąć do wiązki światła.
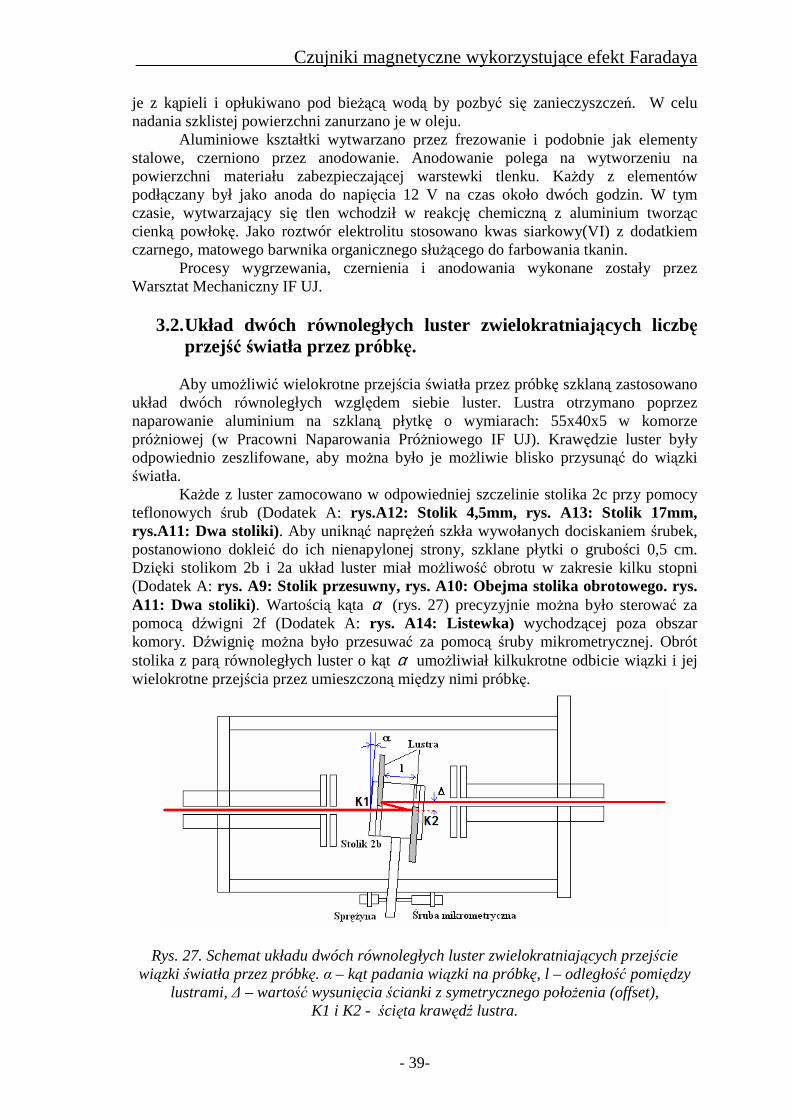
KaŜde z luster zamocowano w odpowiedniej szczelinie stolika 2c przy pomocy teflonowych śrub (Dodatek A: rys.A12: Stolik 4,5mm, rys. A13: Stolik 17mm, rys.A11: Dwa stoliki). Aby uniknąć napręŜeń szkła wywołanych dociskaniem śrubek, postanowiono dokleić do ich nienapylonej strony, szklane płytki o grubości 0,5 cm. Dzięki stolikom 2b i 2a układ luster miał moŜliwość obrotu w zakresie kilku stopni (Dodatek A: rys. A9: Stolik przesuwny, rys. A10: Obejma stolika obrotowego. rys. A11: Dwa stoliki). Wartością kąta α (rys. 27) precyzyjnie moŜna było sterować za pomocą dźwigni 2f (Dodatek A: rys. A14: Listewka) wychodzącej poza obszar komory. Dźwignię moŜna było przesuwać za pomocą śruby mikrometrycznej. Obrót stolika z parą równoległych luster o kąt α umoŜliwiał kilkukrotne odbicie wiązki i jej wielokrotne przejścia przez umieszczoną między nimi próbkę.
Rys. 27. Schemat układu dwóch równoległych luster zwielokratniających przejście wiązki światła przez próbkę. α – kąt padania wiązki na próbkę, l – odległość pomiędzy
lustrami, ∆ – wartość wysunięcia ścianki z symetrycznego połoŜenia (offset), K1 i K2 - ścięta krawędź lustra.
- 40 -
3.3. Źródło pola magnetycznego.
Jako źródło pola magnetycznego wykorzystaliśmy trwałe magnesy neodymowe w formie walca o średnicy φ = 12,1 mm i wysokości 10 mm. Wybrano takie magnesy z uwagi na ich znakomite właściwości magnetyczne, w tym między innymi wytwarzanie silnego pola magnetycznego, przy zachowaniu małych rozmiarów, znacznie większego od tradycyjnych magnesów ferrytowych. Ze względu na technologię produkcji wyróŜnia się dwa rodzaje magnesów neodymowych: magnesy neodymowe spiekane lub magnesy neodymowe wiązane. Jako substrat stosuje się proszek związków na bazie Nd2Fe14B. Magnesy neodymowe spiekane, które stosowaliśmy, produkowane są poprzez prasowanie sproszkowanych komponentów w obecności pola magnetycznego lub obróbce plastycznej w podwyŜszonej temperaturze w celu uzyskania struktury anizotropowej. Dzięki tym zabiegom uzyskuje się ogromną gęstość energii (BH)MAX
wynoszącą około 400kJ/m3. Kolejno następuje wyŜarzanie w podwyŜszonej temperaturze w specjalnym piecu próŜniowym w atmosferze ochronnej. Z uwagi na to, iŜ neodym jest pierwiastkiem bardzo aktywnym chemicznie, aby zapobiec utlenieniu, powierzchnię pokrywa się warstwą zabezpieczającą, którą moŜe stanowić nikiel, cynk, lub warstwy nikiel-cynk lub nikiel-miedz-nikiel. Aby nadać bardziej estetyczny wygląd moŜna je takŜe pokryć srebrem, złotem, lub warstwą złoto-nikiel lub poddać procesowi fosforowania lub epoksydowania. Spośród wielu zalet, najwaŜniejszymi jakie zadecydowały o zastosowaniu ich podczas pomiarów były osiąganie duŜej wartości gęstości energii (BH)MAX , duŜej wartości remanencji12 Br, porównywalnej z Br dla magnesów alnico oraz kilkudziesięciokrotnie wyŜszej wartości pola koercji13 jHc w porównaniu do alnico. Małe rozmiary magnesów pozwalają na zastosowanie ich tam, gdzie wymagana jest miniaturyzacja. Magnesy neodymowe wiązane otrzymuje się poprzez spajanie tworzywem sztucznym proszków substratów. W zaleŜności od metody formowania dobiera się rodzaj tworzywa wiąŜącego. Do formowania wysokociśnieniowego, tak zwanego prasowania stosuje się tworzywa chemoutwardzalne, na przykład Ŝywicę epoksydową. Natomiast do formowania wtryskowego, tworzywo termoplastyczne na przykład nylon. Typ zastosowanego tworzywa wiąŜącego określa maksymalną temperaturę pracy Tmax tych magnesów. W przypadku Ŝywicy epoksydowej jest to około Tmax=120°C, natomiast w przypadku nylonu około Tmax=80°C. Magnesy wiązane moŜna wytwarzać jako izotropowe oraz anizotropowe. Większa produkcja przypada dla magnesów izotropowych z uwagi, iŜ maksymalna gęstość energii (BH)max oraz remanencja Br są około dwukrotnie większe niŜ w najmocniejszych magnesach ferrytowych i około czterokrotnie większe niŜ dla anizotropowych magnesów wiązanych. Oba typy magnesów posiadają bardzo duŜe wartości koercji jHc. Dzięki hermetycznemu zamknięciu ziaren proszku Nd-Fe-B w osnowie tworzywa sztucznego, nie ulega on korozji i nie wymaga pokrywania powierzchni warstwa ochronną. Magnesy neodymowe spiekane i wiązane charakteryzują się duŜą powtarzalnością własności magnetycznych, bardzo wąską tolerancją wymiarową +/-0,1 mm i dobrą jakością powierzchni.
12 Remanencja – strumień resztkowy czyli wartość indukcji pola magnetycznego B pozostały po odsunięciu pola magnesującego -H,H. 13 Koercja – wartość zewnętrznego pola odmagnesowującego.
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 41-
Magnesy neodymowe spiekane, zakupiliśmy w firmie „Enes” [25]. NajwaŜniejsze parametry tych magnesów zestawiliśmy w tab.3.
Tab.3. Charakterystyka stosowanych magnesów neodymowych.
Remanencja (Br)
Koercja (bHc)
Koercja (jH c)
Gęstość energii (BH)max
Max. Temp. Pracy** Symbol
Materiału kGs kOe kOe kJ/m3 MGsOe °C
N38H 12,1-12,5 Min. 11,3 Min. 17,0 286-302 36-38 120 W kaŜdym z nabiegunników o średnicy 12cm umieściliśmy po dwanaście magnesów (Dodatek A: Rys. A6b: Korona2).
3.4. Próbki. W celu sprawdzenia poprawności działania zaprojektowanego układu naleŜało zbadać przy jego uŜyciu kilka próbek o dobrze znanych własnościach magnetooptycznych. Do naszej dyspozycji mieliśmy dwie próbki:
1. Kompozyt granatu terbowo – skandowo – aluminiowego (ang. Terbium – Scandium – Aluminium Garnet 12323 OAlScTbTSAG = ) z perowskitem terbowo –
skandowym (ang. Terbium – Scandium perowskite eutectic 3TbScOTSP= )
w stosunku 1/2/ =TSPTSAG , domieszkowany %5 atomów prazeodymu [26]. Próbka miała kształt spłaszczonego walca o średnicy 05,05,2 ± mm i grubości
05,01,0 ± mm. śółta barwa próbki jest wynikiem odłoŜenia się na jej powierzchni tlenku skandu. Pojedyncze kryształy TSAG otrzymano z Instytutu Technologii Materiałów Elektronicznych (ITME), gdzie były produkowane metodą mikrowyciągania (ang. micro-pulling down method) ze stopu terbu, skandu i granatu w piecu mikrofalowym.. Szybkość wyciągania (ang. pulling rate) wynosiła min/3,0 mm [26]. Czystości uŜytych
tlenków: terbu 74OTb , skandu 32OSc oraz glinu 32OAl do otrzymania stopu wynosiły
%99,99 . Wzrost kryształów odbywał się w atmosferze przepływającego gazowego argonu. Jako podkład wzrostu uŜyto kryształu YAG, aby zapewnić orientację kryształów w kierunku 111 . Próbka była dwustronne polerowana prostopadle do
kierunku wzrostu, czyli do kierunku 111 .
- 42 -
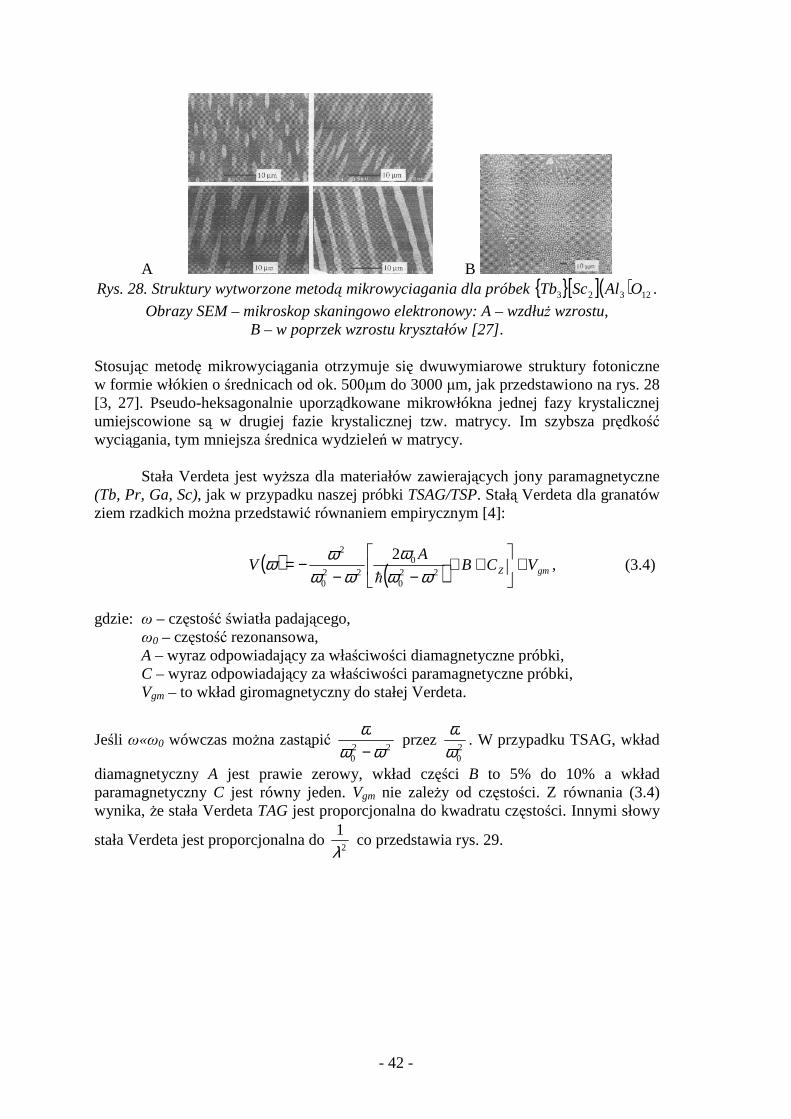
A B Rys. 28. Struktury wytworzone metodą mikrowyciagania dla próbek [ ]( ) 12323 OAlScTb .
Obrazy SEM – mikroskop skaningowo elektronowy: A – wzdłuŜ wzrostu, B – w poprzek wzrostu kryształów [27].
Stosując metodę mikrowyciągania otrzymuje się dwuwymiarowe struktury fotoniczne w formie włókien o średnicach od ok. 500µm do 3000 µm, jak przedstawiono na rys. 28 [3, 27]. Pseudo-heksagonalnie uporządkowane mikrowłókna jednej fazy krystalicznej umiejscowione są w drugiej fazie krystalicznej tzw. matrycy. Im szybsza prędkość wyciągania, tym mniejsza średnica wydzieleń w matrycy.
Stała Verdeta jest wyŜsza dla materiałów zawierających jony paramagnetyczne (Tb, Pr, Ga, Sc), jak w przypadku naszej próbki TSAG/TSP. Stałą Verdeta dla granatów ziem rzadkich moŜna przedstawić równaniem empirycznym [4]:
( ) ( ) gmZ VCBA
V +
++
−−−=
220
022
0
2 2
ωωω
ωωωω
h, (3.4)
gdzie: ω – częstość światła padającego, ω0 – częstość rezonansowa, A – wyraz odpowiadający za właściwości diamagnetyczne próbki, C – wyraz odpowiadający za właściwości paramagnetyczne próbki, Vgm – to wkład giromagnetyczny do stałej Verdeta.
Jeśli ω«ω0 wówczas moŜna zastąpić 22
0 ωωω−
przez 20ω
ω. W przypadku TSAG, wkład
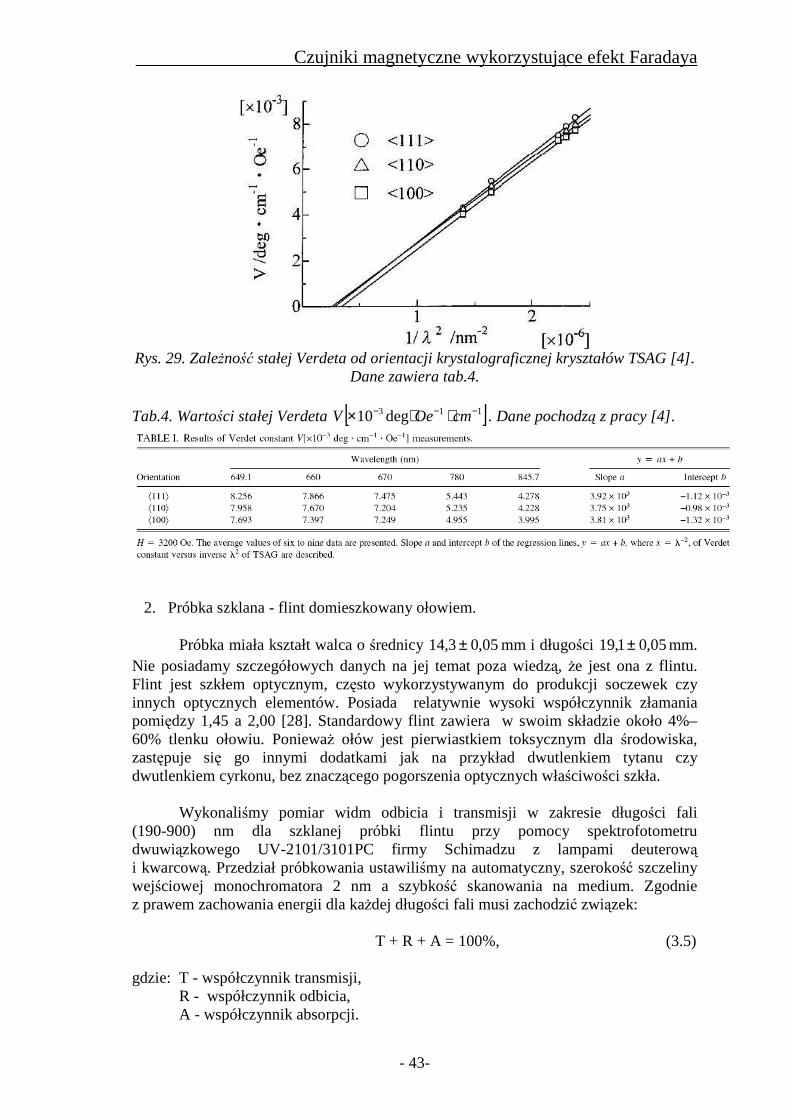
diamagnetyczny A jest prawie zerowy, wkład części B to 5% do 10% a wkład paramagnetyczny C jest równy jeden. Vgm nie zaleŜy od częstości. Z równania (3.4) wynika, Ŝe stała Verdeta TAG jest proporcjonalna do kwadratu częstości. Innymi słowy
stała Verdeta jest proporcjonalna do 2
1
λ co przedstawia rys. 29.
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 43-
Rys. 29. ZaleŜność stałej Verdeta od orientacji krystalograficznej kryształów TSAG [4].
Dane zawiera tab.4. Tab.4. Wartości stałej Verdeta [ ]113 deg10 −−− ⋅⋅× cmOeV . Dane pochodzą z pracy [4].
2. Próbka szklana - flint domieszkowany ołowiem. Próbka miała kształt walca o średnicy 05,03,14 ± mm i długości 05,01,19 ± mm. Nie posiadamy szczegółowych danych na jej temat poza wiedzą, Ŝe jest ona z flintu. Flint jest szkłem optycznym, często wykorzystywanym do produkcji soczewek czy innych optycznych elementów. Posiada relatywnie wysoki współczynnik złamania pomiędzy 1,45 a 2,00 [28]. Standardowy flint zawiera w swoim składzie około 4%–60% tlenku ołowiu. PoniewaŜ ołów jest pierwiastkiem toksycznym dla środowiska, zastępuje się go innymi dodatkami jak na przykład dwutlenkiem tytanu czy dwutlenkiem cyrkonu, bez znaczącego pogorszenia optycznych właściwości szkła. Wykonaliśmy pomiar widm odbicia i transmisji w zakresie długości fali (190-900) nm dla szklanej próbki flintu przy pomocy spektrofotometru dwuwiązkowego UV-2101/3101PC firmy Schimadzu z lampami deuterową i kwarcową. Przedział próbkowania ustawiliśmy na automatyczny, szerokość szczeliny wejściowej monochromatora 2 nm a szybkość skanowania na medium. Zgodnie z prawem zachowania energii dla kaŜdej długości fali musi zachodzić związek: T + R + A = 100%, (3.5) gdzie: T - współczynnik transmisji, R - współczynnik odbicia, A - współczynnik absorpcji.
- 44 -
Zdefiniowane są one wzorami:
0I
IT T= ,
0I
IR R= ,
0I
IA A= , (3.6)
gdzie: ART IIII ,,,0 oznaczają kolejno natęŜenia światła: padającego, przechodzącego,
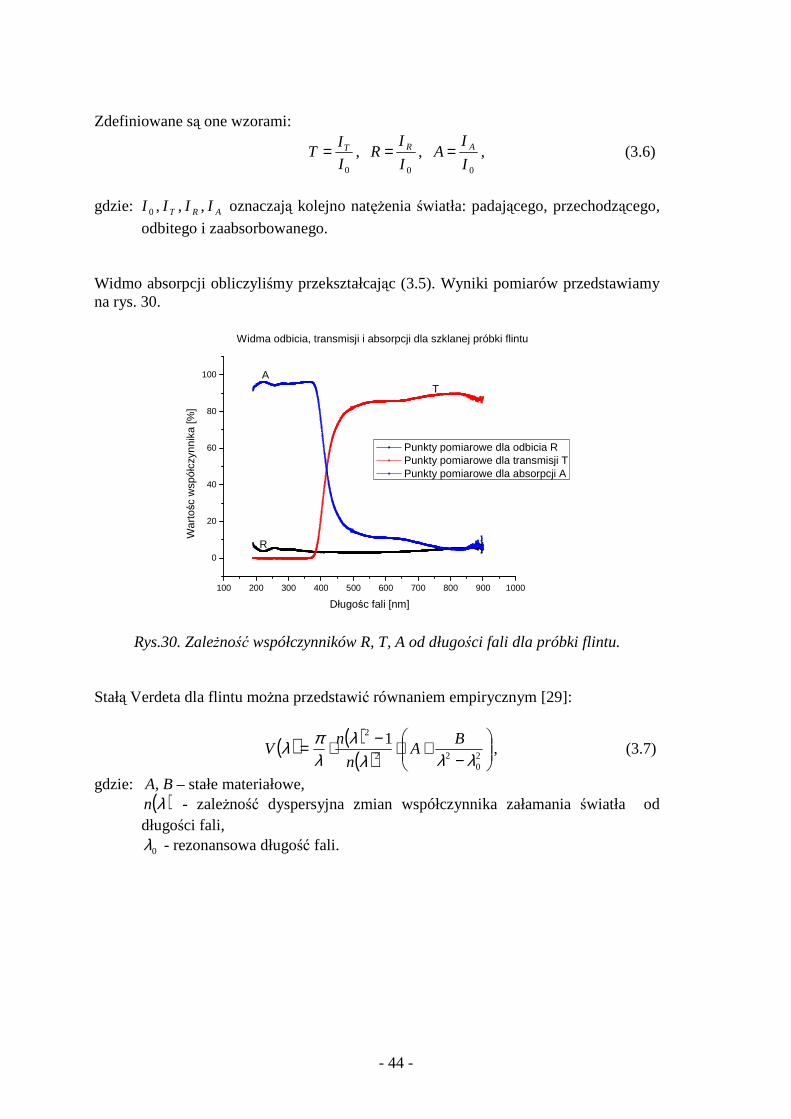
odbitego i zaabsorbowanego. Widmo absorpcji obliczyliśmy przekształcając (3.5). Wyniki pomiarów przedstawiamy na rys. 30.
100 200 300 400 500 600 700 800 900 1000
0
20
40
60
80
100
Widma odbicia, transmisji i absorpcji dla szklanej próbki flintu
War
tośc
wsp
ółcz
ynni
ka [%
]
Długośc fali [nm]
Punkty pomiarowe dla odbicia R Punkty pomiarowe dla transmisji T Punkty pomiarowe dla absorpcji A
AT
R
Rys.30. ZaleŜność współczynników R, T, A od długości fali dla próbki flintu.
Stałą Verdeta dla flintu moŜna przedstawić równaniem empirycznym [29]:
( ) ( )( )
−+⋅−⋅= 2
022
2 1
λλλλ
λπλ B
An
nV , (3.7)
gdzie: A, B – stałe materiałowe, ( )λn - zaleŜność dyspersyjna zmian współczynnika załamania światła od długości fali, 0λ - rezonansowa długość fali.
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 45-
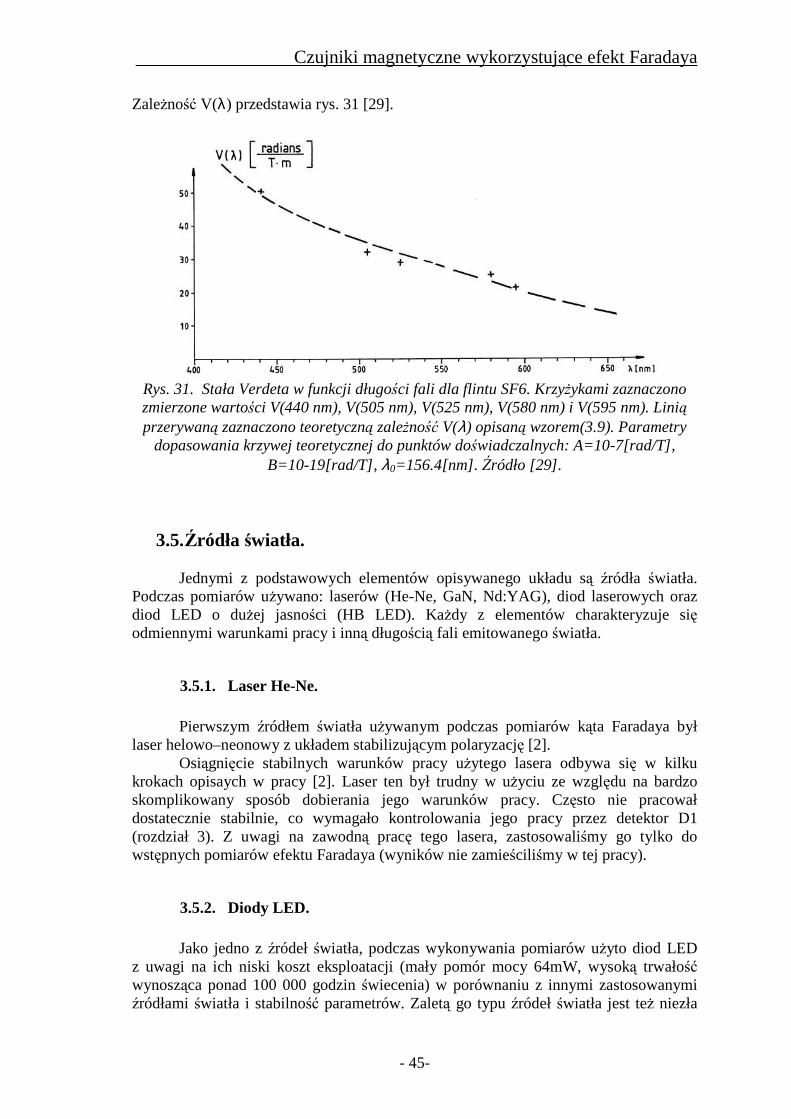
ZaleŜność V(λ) przedstawia rys. 31 [29].
Rys. 31. Stała Verdeta w funkcji długości fali dla flintu SF6. KrzyŜykami zaznaczono zmierzone wartości V(440 nm), V(505 nm), V(525 nm), V(580 nm) i V(595 nm). Linią przerywaną zaznaczono teoretyczną zaleŜność V(λ) opisaną wzorem(3.9). Parametry
dopasowania krzywej teoretycznej do punktów doświadczalnych: A=10-7[rad/T], B=10-19[rad/T], λ0=156.4[nm]. Źródło [29].
3.5. Źródła światła. Jednymi z podstawowych elementów opisywanego układu są źródła światła. Podczas pomiarów uŜywano: laserów (He-Ne, GaN, Nd:YAG), diod laserowych oraz diod LED o duŜej jasności (HB LED). KaŜdy z elementów charakteryzuje się odmiennymi warunkami pracy i inną długością fali emitowanego światła.
3.5.1. Laser He-Ne.
Pierwszym źródłem światła uŜywanym podczas pomiarów kąta Faradaya był laser helowo–neonowy z układem stabilizującym polaryzację [2].
Osiągnięcie stabilnych warunków pracy uŜytego lasera odbywa się w kilku krokach opisaych w pracy [2]. Laser ten był trudny w uŜyciu ze względu na bardzo skomplikowany sposób dobierania jego warunków pracy. Często nie pracował dostatecznie stabilnie, co wymagało kontrolowania jego pracy przez detektor D1 (rozdział 3). Z uwagi na zawodną pracę tego lasera, zastosowaliśmy go tylko do wstępnych pomiarów efektu Faradaya (wyników nie zamieściliśmy w tej pracy).
3.5.2. Diody LED.
Jako jedno z źródeł światła, podczas wykonywania pomiarów uŜyto diod LED z uwagi na ich niski koszt eksploatacji (mały pomór mocy 64mW, wysoką trwałość wynosząca ponad 100 000 godzin świecenia) w porównaniu z innymi zastosowanymi źródłami światła i stabilność parametrów. Zaletą go typu źródeł światła jest teŜ niezła
- 46 -
monochromatyczność w porównaniu z klasycznymi źródłami światła, takimi jak Ŝarówka, choć gorsza niŜ dla laserów. Do innych zalet moŜna takŜe zaliczyć lekkość i małe rozmiary (średnica 5mm), łatwość montaŜu, jak i prostotę układu zasilającego. Podczas pomiarów uŜywano diod o podwyŜszonej jasności, tak zwanych HB LED (ang. high brightness LED) o jasności wynoszącej 16 cd. Jedną z wad, obok niepełnej monochromatyczności, jest rozbieŜność wiązki świetlnej rzędu 35 stopni. MoŜna jednak zmniejszyć ten efekt uŜywając układu teleskopowego lub soczewki skupiającej.
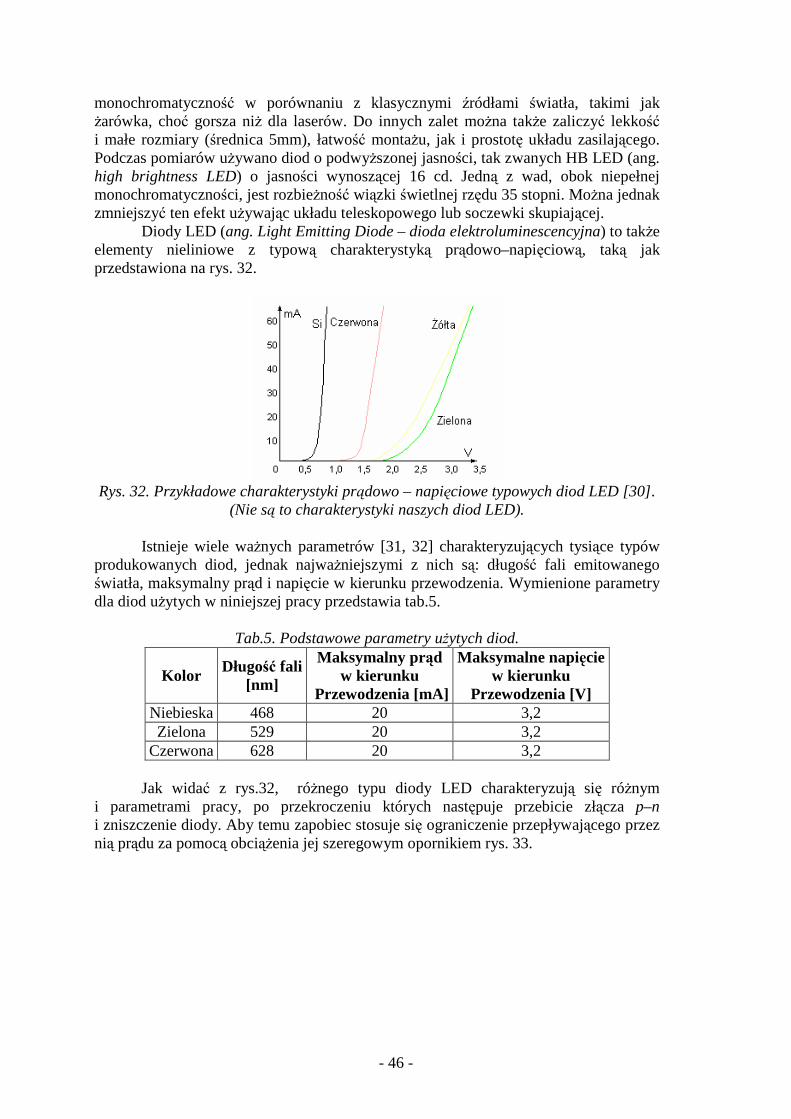
Diody LED (ang. Light Emitting Diode – dioda elektroluminescencyjna) to takŜe elementy nieliniowe z typową charakterystyką prądowo–napięciową, taką jak przedstawiona na rys. 32.
Rys. 32. Przykładowe charakterystyki prądowo – napięciowe typowych diod LED [30].
(Nie są to charakterystyki naszych diod LED).
Istnieje wiele waŜnych parametrów [31, 32] charakteryzujących tysiące typów produkowanych diod, jednak najwaŜniejszymi z nich są: długość fali emitowanego światła, maksymalny prąd i napięcie w kierunku przewodzenia. Wymienione parametry dla diod uŜytych w niniejszej pracy przedstawia tab.5.
Tab.5. Podstawowe parametry uŜytych diod.
Kolor Długość fali
[nm]
Maksymalny prąd w kierunku
Przewodzenia [mA]
Maksymalne napięcie w kierunku
Przewodzenia [V] Niebieska 468 20 3,2 Zielona 529 20 3,2
Czerwona 628 20 3,2
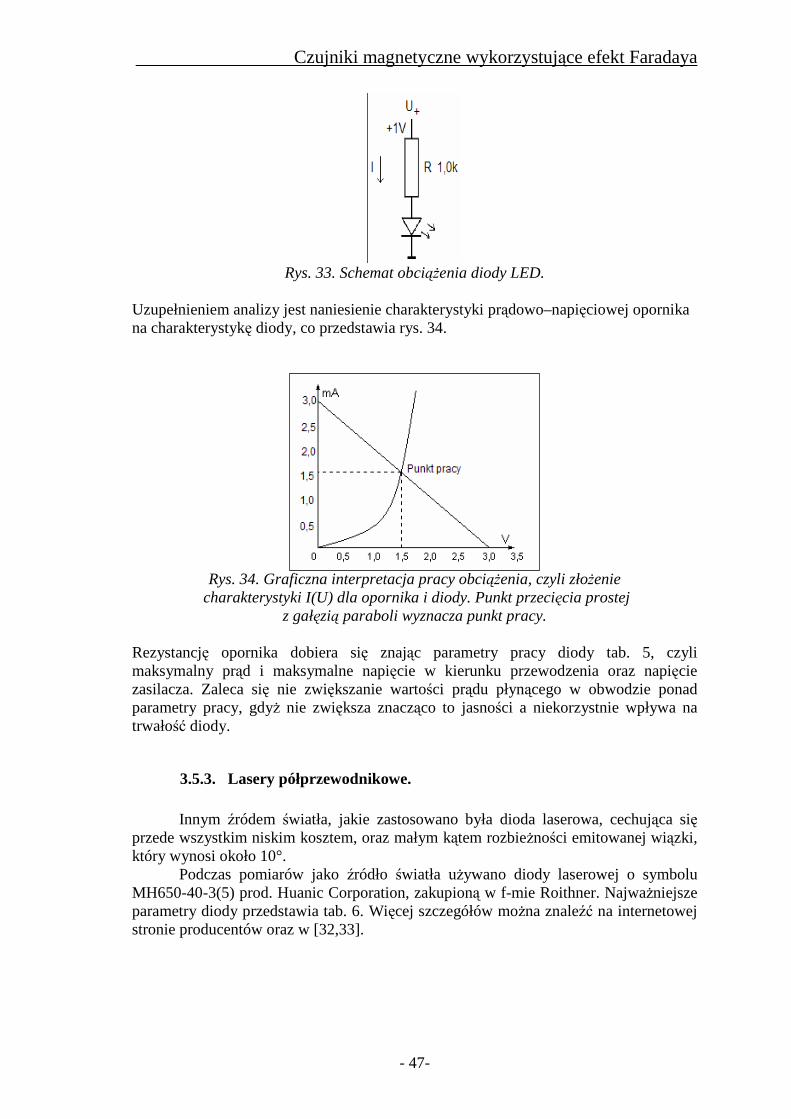
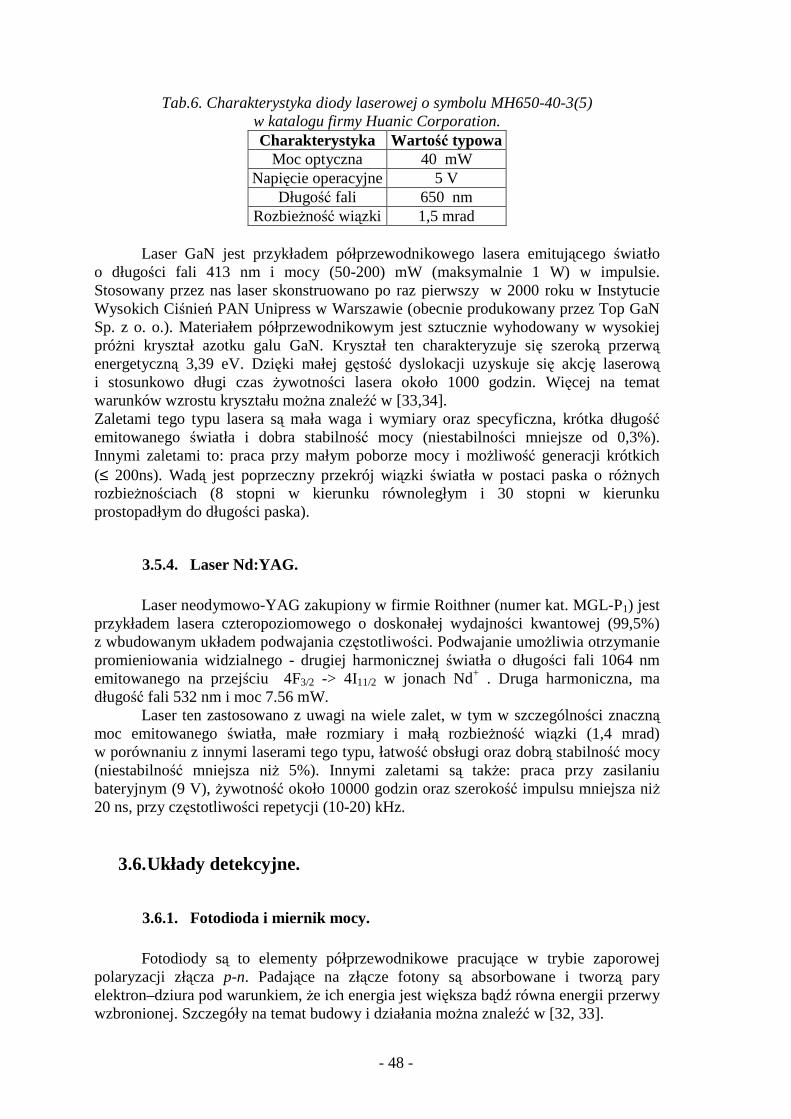
Jak widać z rys.32, róŜnego typu diody LED charakteryzują się róŜnym i parametrami pracy, po przekroczeniu których następuje przebicie złącza p–n i zniszczenie diody. Aby temu zapobiec stosuje się ograniczenie przepływającego przez nią prądu za pomocą obciąŜenia jej szeregowym opornikiem rys. 33.
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 47-
Rys. 33. Schemat obciąŜenia diody LED.
Uzupełnieniem analizy jest naniesienie charakterystyki prądowo–napięciowej opornika na charakterystykę diody, co przedstawia rys. 34.
Rys. 34. Graficzna interpretacja pracy obciąŜenia, czyli złoŜenie
charakterystyki I(U) dla opornika i diody. Punkt przecięcia prostej z gałęzią paraboli wyznacza punkt pracy.
Rezystancję opornika dobiera się znając parametry pracy diody tab. 5, czyli maksymalny prąd i maksymalne napięcie w kierunku przewodzenia oraz napięcie zasilacza. Zaleca się nie zwiększanie wartości prądu płynącego w obwodzie ponad parametry pracy, gdyŜ nie zwiększa znacząco to jasności a niekorzystnie wpływa na trwałość diody.
3.5.3. Lasery półprzewodnikowe.
Innym źródem światła, jakie zastosowano była dioda laserowa, cechująca się przede wszystkim niskim kosztem, oraz małym kątem rozbieŜności emitowanej wiązki, który wynosi około 10°.
Podczas pomiarów jako źródło światła uŜywano diody laserowej o symbolu MH650-40-3(5) prod. Huanic Corporation, zakupioną w f-mie Roithner. NajwaŜniejsze parametry diody przedstawia tab. 6. Więcej szczegółów moŜna znaleźć na internetowej stronie producentów oraz w [32,33].
- 48 -
Tab.6. Charakterystyka diody laserowej o symbolu MH650-40-3(5) w katalogu firmy Huanic Corporation. Charakterystyka Warto ść typowa
Moc optyczna 40 mW Napięcie operacyjne 5 V
Długość fali 650 nm RozbieŜność wiązki 1,5 mrad
Laser GaN jest przykładem półprzewodnikowego lasera emitującego światło o długości fali 413 nm i mocy (50-200) mW (maksymalnie 1 W) w impulsie. Stosowany przez nas laser skonstruowano po raz pierwszy w 2000 roku w Instytucie Wysokich Ciśnień PAN Unipress w Warszawie (obecnie produkowany przez Top GaN Sp. z o. o.). Materiałem półprzewodnikowym jest sztucznie wyhodowany w wysokiej próŜni kryształ azotku galu GaN. Kryształ ten charakteryzuje się szeroką przerwą energetyczną 3,39 eV. Dzięki małej gęstość dyslokacji uzyskuje się akcję laserową i stosunkowo długi czas Ŝywotności lasera około 1000 godzin. Więcej na temat warunków wzrostu kryształu moŜna znaleźć w [33,34]. Zaletami tego typu lasera są mała waga i wymiary oraz specyficzna, krótka długość emitowanego światła i dobra stabilność mocy (niestabilności mniejsze od 0,3%). Innymi zaletami to: praca przy małym poborze mocy i moŜliwość generacji krótkich (≤ 200ns). Wadą jest poprzeczny przekrój wiązki światła w postaci paska o róŜnych rozbieŜnościach (8 stopni w kierunku równoległym i 30 stopni w kierunku prostopadłym do długości paska).
3.5.4. Laser Nd:YAG.
Laser neodymowo-YAG zakupiony w firmie Roithner (numer kat. MGL-P1) jest przykładem lasera czteropoziomowego o doskonałej wydajności kwantowej (99,5%) z wbudowanym układem podwajania częstotliwości. Podwajanie umoŜliwia otrzymanie promieniowania widzialnego - drugiej harmonicznej światła o długości fali 1064 nm emitowanego na przejściu 4F3/2 -> 4I11/2 w jonach Nd+ . Druga harmoniczna, ma długość fali 532 nm i moc 7.56 mW. Laser ten zastosowano z uwagi na wiele zalet, w tym w szczególności znaczną moc emitowanego światła, małe rozmiary i małą rozbieŜność wiązki (1,4 mrad) w porównaniu z innymi laserami tego typu, łatwość obsługi oraz dobrą stabilność mocy (niestabilność mniejsza niŜ 5%). Innymi zaletami są takŜe: praca przy zasilaniu bateryjnym (9 V), Ŝywotność około 10000 godzin oraz szerokość impulsu mniejsza niŜ 20 ns, przy częstotliwości repetycji (10-20) kHz.
3.6. Układy detekcyjne.
3.6.1. Fotodioda i miernik mocy.
Fotodiody są to elementy półprzewodnikowe pracujące w trybie zaporowej polaryzacji złącza p-n. Padające na złącze fotony są absorbowane i tworzą pary elektron–dziura pod warunkiem, Ŝe ich energia jest większa bądź równa energii przerwy wzbronionej. Szczegóły na temat budowy i działania moŜna znaleźć w [32, 33].
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 49-
Podczas pomiarów oprócz fotodiody uŜywano takŜe miernika mocy wiązek świetlnych firmy Coherent (mod. Fieldmaster) [35]. Miernik ten, jak sama nazwa wskazuje, pozwala na pomiar mocy światła docierającego do czujnika, po uprzednim nastawieniu odpowiedniej długości fali. Zastosowano go ze względu na duŜą czułość, bezwzględną kalibrację i dokładność pomiaru mocy rzędu +/-1nW, ale takŜe na lekkość i małe wymiary.
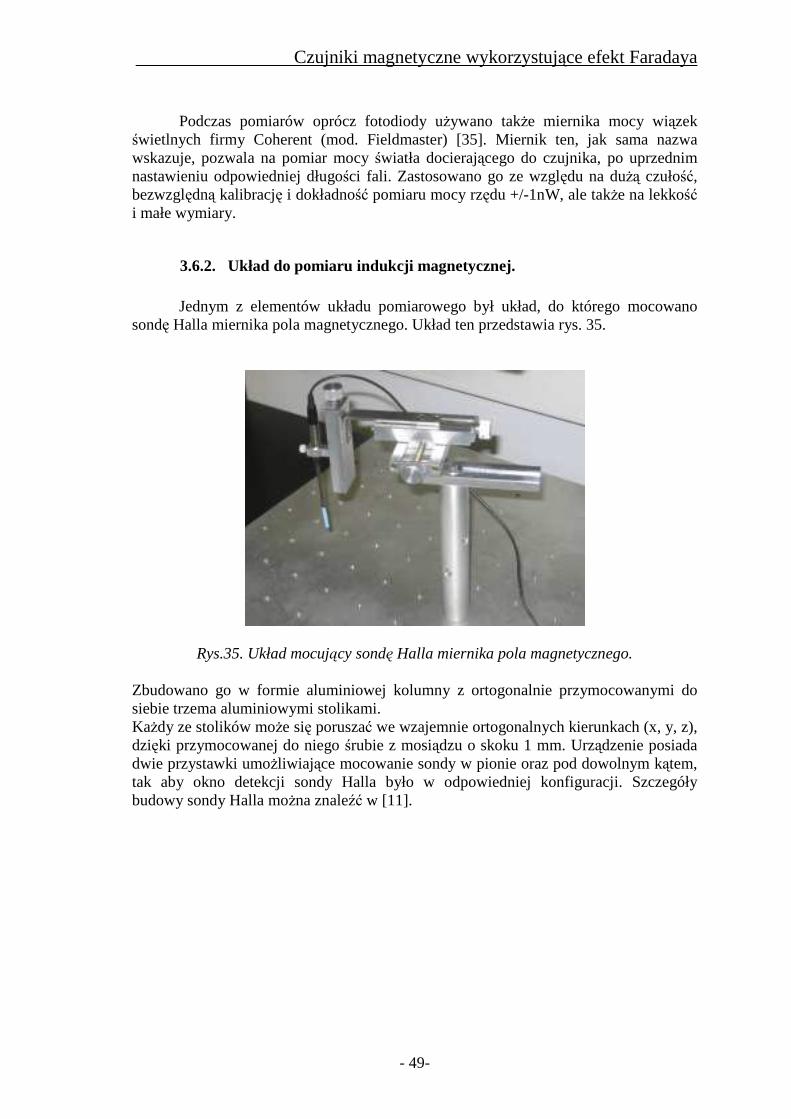
3.6.2. Układ do pomiaru indukcji magnetycznej. Jednym z elementów układu pomiarowego był układ, do którego mocowano sondę Halla miernika pola magnetycznego. Układ ten przedstawia rys. 35.
Rys.35. Układ mocujący sondę Halla miernika pola magnetycznego. Zbudowano go w formie aluminiowej kolumny z ortogonalnie przymocowanymi do siebie trzema aluminiowymi stolikami. KaŜdy ze stolików moŜe się poruszać we wzajemnie ortogonalnych kierunkach (x, y, z), dzięki przymocowanej do niego śrubie z mosiądzu o skoku 1 mm. Urządzenie posiada dwie przystawki umoŜliwiające mocowanie sondy w pionie oraz pod dowolnym kątem, tak aby okno detekcji sondy Halla było w odpowiedniej konfiguracji. Szczegóły budowy sondy Halla moŜna znaleźć w [11].

- 50 -
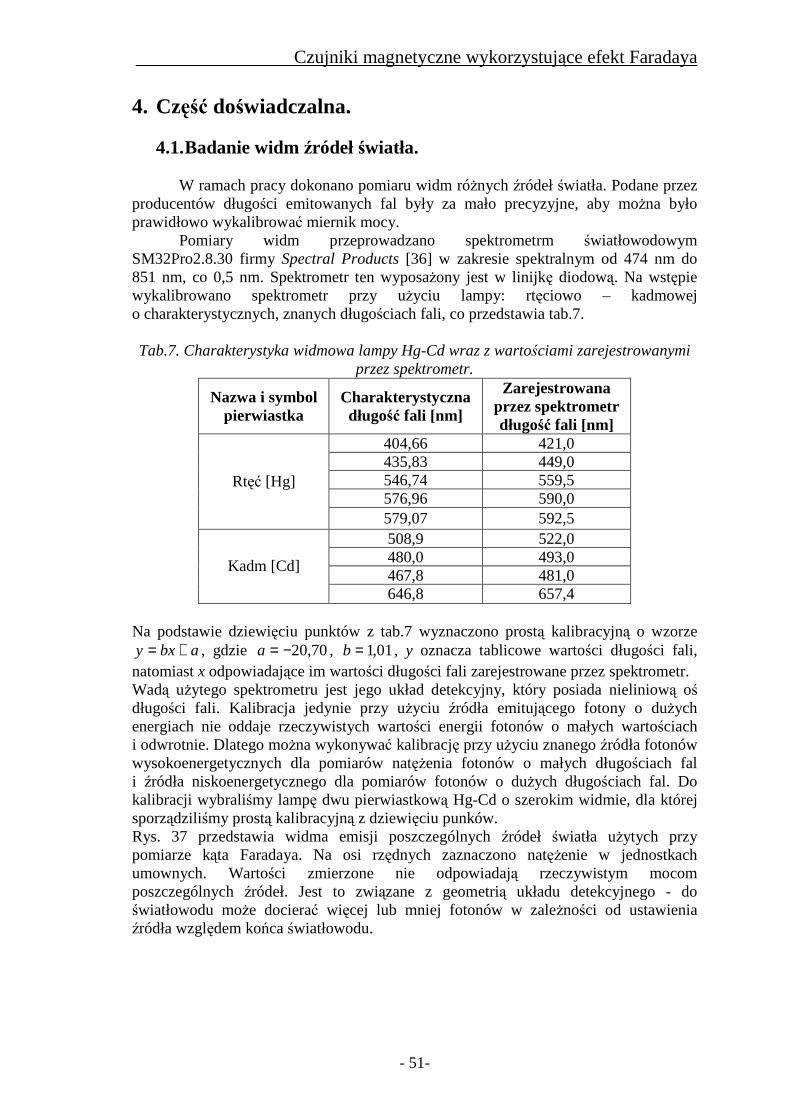
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 51-
4. Część doświadczalna.
4.1. Badanie widm źródeł światła.
W ramach pracy dokonano pomiaru widm róŜnych źródeł światła. Podane przez producentów długości emitowanych fal były za mało precyzyjne, aby moŜna było prawidłowo wykalibrować miernik mocy. Pomiary widm przeprowadzano spektrometrm światłowodowym SM32Pro2.8.30 firmy Spectral Products [36] w zakresie spektralnym od 474 nm do 851 nm, co 0,5 nm. Spektrometr ten wyposaŜony jest w linijkę diodową. Na wstępie wykalibrowano spektrometr przy uŜyciu lampy: rtęciowo – kadmowej o charakterystycznych, znanych długościach fali, co przedstawia tab.7. Tab.7. Charakterystyka widmowa lampy Hg-Cd wraz z wartościami zarejestrowanymi
przez spektrometr.
Nazwa i symbol pierwiastka
Charakterystyczna długość fali [nm]
Zarejestrowana przez spektrometr długość fali [nm]
404,66 421,0 435,83 449,0 546,74 559,5 576,96 590,0
Rtęć [Hg]
579,07 592,5 508,9 522,0 480,0 493,0 467,8 481,0
Kadm [Cd]
646,8 657,4 Na podstawie dziewięciu punktów z tab.7 wyznaczono prostą kalibracyjną o wzorze
abxy += , gdzie 70,20−=a , 01,1=b , y oznacza tablicowe wartości długości fali, natomiast x odpowiadające im wartości długości fali zarejestrowane przez spektrometr. Wadą uŜytego spektrometru jest jego układ detekcyjny, który posiada nieliniową oś długości fali. Kalibracja jedynie przy uŜyciu źródła emitującego fotony o duŜych energiach nie oddaje rzeczywistych wartości energii fotonów o małych wartościach i odwrotnie. Dlatego moŜna wykonywać kalibrację przy uŜyciu znanego źródła fotonów wysokoenergetycznych dla pomiarów natęŜenia fotonów o małych długościach fal i źródła niskoenergetycznego dla pomiarów fotonów o duŜych długościach fal. Do kalibracji wybraliśmy lampę dwu pierwiastkową Hg-Cd o szerokim widmie, dla której sporządziliśmy prostą kalibracyjną z dziewięciu punków. Rys. 37 przedstawia widma emisji poszczególnych źródeł światła uŜytych przy pomiarze kąta Faradaya. Na osi rzędnych zaznaczono natęŜenie w jednostkach umownych. Wartości zmierzone nie odpowiadają rzeczywistym mocom poszczególnych źródeł. Jest to związane z geometrią układu detekcyjnego - do światłowodu moŜe docierać więcej lub mniej fotonów w zaleŜności od ustawienia źródła względem końca światłowodu.
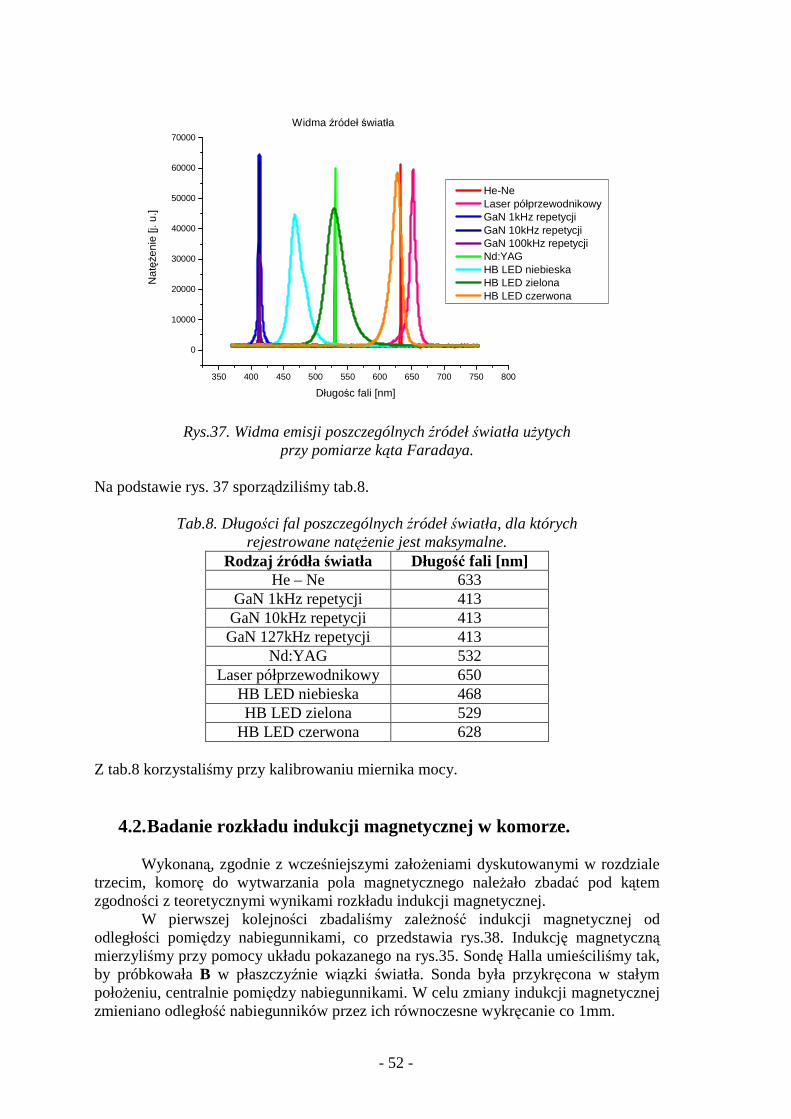
- 52 -
350 400 450 500 550 600 650 700 750 800
0
10000
20000
30000
40000
50000
60000
70000
Widma źródeł światła
NatęŜen
ie [j
. u.]
Długośc fali [nm]
He-Ne Laser półprzewodnikowy GaN 1kHz repetycji GaN 10kHz repetycji GaN 100kHz repetycji Nd:YAG HB LED niebieska HB LED zielona HB LED czerwona
Rys.37. Widma emisji poszczególnych źródeł światła uŜytych
przy pomiarze kąta Faradaya. Na podstawie rys. 37 sporządziliśmy tab.8.
Tab.8. Długości fal poszczególnych źródeł światła, dla których rejestrowane natęŜenie jest maksymalne.
Rodzaj źródła światła Długość fali [nm] He – Ne 633
GaN 1kHz repetycji 413 GaN 10kHz repetycji 413 GaN 127kHz repetycji 413
Nd:YAG 532 Laser półprzewodnikowy 650
HB LED niebieska 468 HB LED zielona 529
HB LED czerwona 628 Z tab.8 korzystaliśmy przy kalibrowaniu miernika mocy.
4.2. Badanie rozkładu indukcji magnetycznej w komorze. Wykonaną, zgodnie z wcześniejszymi załoŜeniami dyskutowanymi w rozdziale trzecim, komorę do wytwarzania pola magnetycznego naleŜało zbadać pod kątem zgodności z teoretycznymi wynikami rozkładu indukcji magnetycznej. W pierwszej kolejności zbadaliśmy zaleŜność indukcji magnetycznej od odległości pomiędzy nabiegunnikami, co przedstawia rys.38. Indukcję magnetyczną mierzyliśmy przy pomocy układu pokazanego na rys.35. Sondę Halla umieściliśmy tak, by próbkowała B w płaszczyźnie wiązki światła. Sonda była przykręcona w stałym połoŜeniu, centralnie pomiędzy nabiegunnikami. W celu zmiany indukcji magnetycznej zmieniano odległość nabiegunników przez ich równoczesne wykręcanie co 1mm.
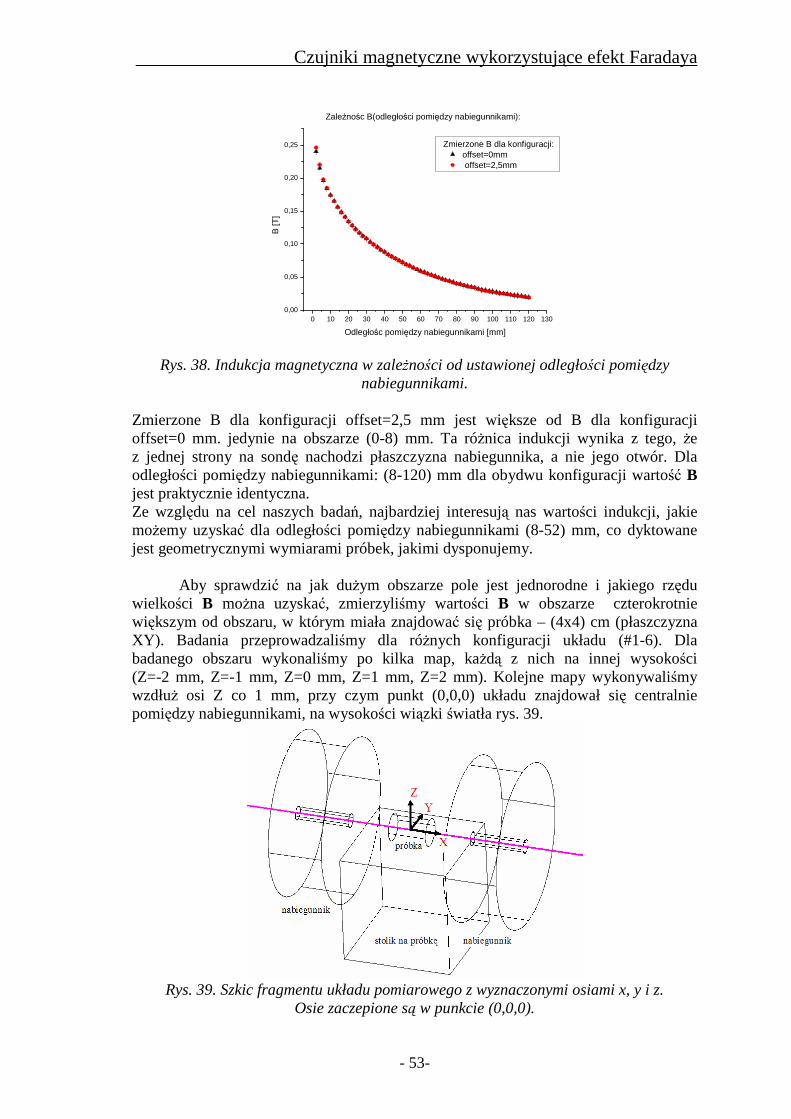
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 53-
0 10 20 30 40 50 60 70 80 90 100 110 120 1300,00
0,05
0,10
0,15
0,20
0,25 Zmierzone B dla konfiguracji:offset=0mm offset=2,5mm
B [T
]
Odległośc pomiędzy nabiegunnikami [mm]
ZaleŜnośc B(odległości pomiędzy nabiegunnikami):
Rys. 38. Indukcja magnetyczna w zaleŜności od ustawionej odległości pomiędzy
nabiegunnikami. Zmierzone B dla konfiguracji offset=2,5 mm jest większe od B dla konfiguracji offset=0 mm. jedynie na obszarze (0-8) mm. Ta róŜnica indukcji wynika z tego, Ŝe z jednej strony na sondę nachodzi płaszczyzna nabiegunnika, a nie jego otwór. Dla odległości pomiędzy nabiegunnikami: (8-120) mm dla obydwu konfiguracji wartość B jest praktycznie identyczna. Ze względu na cel naszych badań, najbardziej interesują nas wartości indukcji, jakie moŜemy uzyskać dla odległości pomiędzy nabiegunnikami (8-52) mm, co dyktowane jest geometrycznymi wymiarami próbek, jakimi dysponujemy.
Aby sprawdzić na jak duŜym obszarze pole jest jednorodne i jakiego rzędu wielkości B moŜna uzyskać, zmierzyliśmy wartości B w obszarze czterokrotnie większym od obszaru, w którym miała znajdować się próbka – (4x4) cm (płaszczyzna XY). Badania przeprowadzaliśmy dla róŜnych konfiguracji układu (#1-6). Dla badanego obszaru wykonaliśmy po kilka map, kaŜdą z nich na innej wysokości (Z=-2 mm, Z=-1 mm, Z=0 mm, Z=1 mm, Z=2 mm). Kolejne mapy wykonywaliśmy wzdłuŜ osi Z co 1 mm, przy czym punkt (0,0,0) układu znajdował się centralnie pomiędzy nabiegunnikami, na wysokości wiązki światła rys. 39.
Rys. 39. Szkic fragmentu układu pomiarowego z wyznaczonymi osiami x, y i z.
Osie zaczepione są w punkcie (0,0,0).
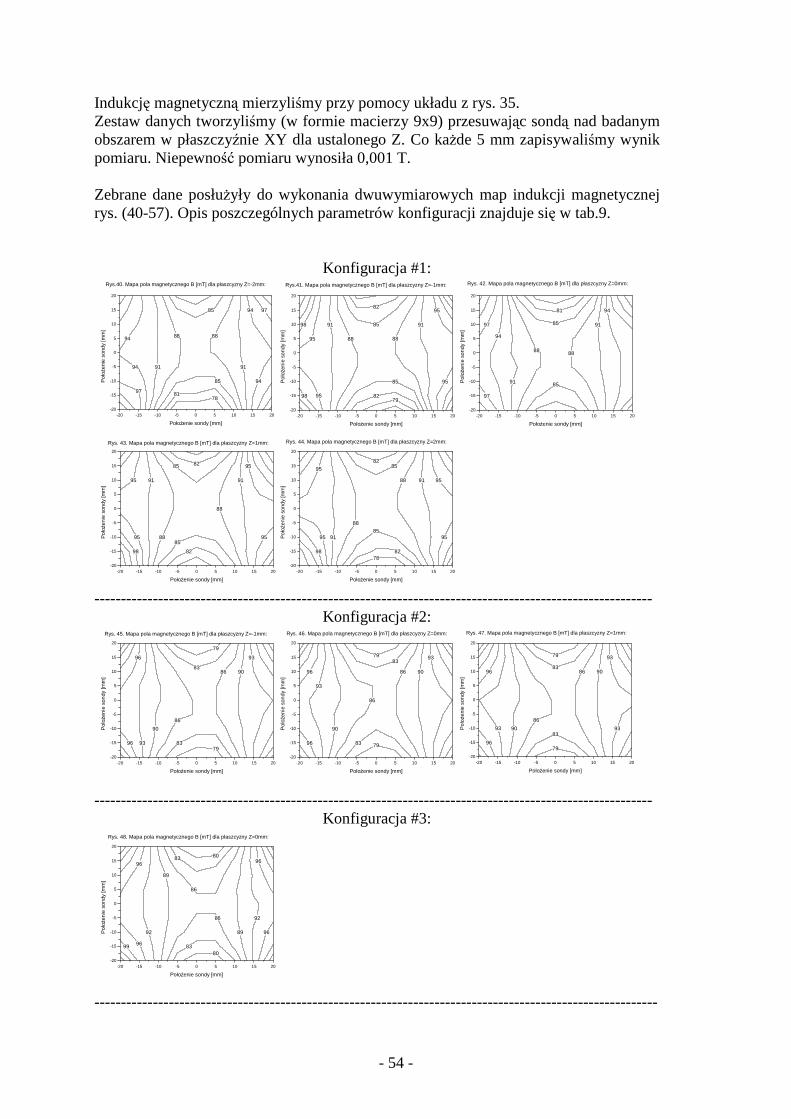
- 54 -
Indukcję magnetyczną mierzyliśmy przy pomocy układu z rys. 35. Zestaw danych tworzyliśmy (w formie macierzy 9x9) przesuwając sondą nad badanym obszarem w płaszczyźnie XY dla ustalonego Z. Co kaŜde 5 mm zapisywaliśmy wynik pomiaru. Niepewność pomiaru wynosiła 0,001 T. Zebrane dane posłuŜyły do wykonania dwuwymiarowych map indukcji magnetycznej rys. (40-57). Opis poszczególnych parametrów konfiguracji znajduje się w tab.9.
Konfiguracja #1:
--------------------------------------------------------------------------------------------------------- Konfiguracja #2:
---------------------------------------------------------------------------------------------------------
Konfiguracja #3:
----------------------------------------------------------------------------------------------------------
97
94 91
88 88
91
85
81
94
94
85
94
78
97
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
Rys.40. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=-2mm:
98 95
91
88 88
91
85
85
82
95
95
95
82
98
79
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys.41. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=-1mm:P
ołoŜ
enie
son
dy [m
m]
PołoŜenie sondy [mm]
97
94
91
88 88
91
94
85
85
81
97
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 42. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=0mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
98
95
91
88
88
91
85
85 95
82
95
95
82
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 43. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=1mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
98
95 91
88
88 91
85
85
82
95
95
95
78
82
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 44. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=2mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
96 93
90
86
86 90
93
83
83
96
79
79
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 45. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=-1mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
96
93
90
86
86 90
9383
83
96
79
79
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 46. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=0mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
96
93 90
86
86 9083
93
8393
96
79
79
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 47. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=1mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
99 96
92
89
89
86
9286
83
83
96 96
96
80
80
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 48. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=0mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
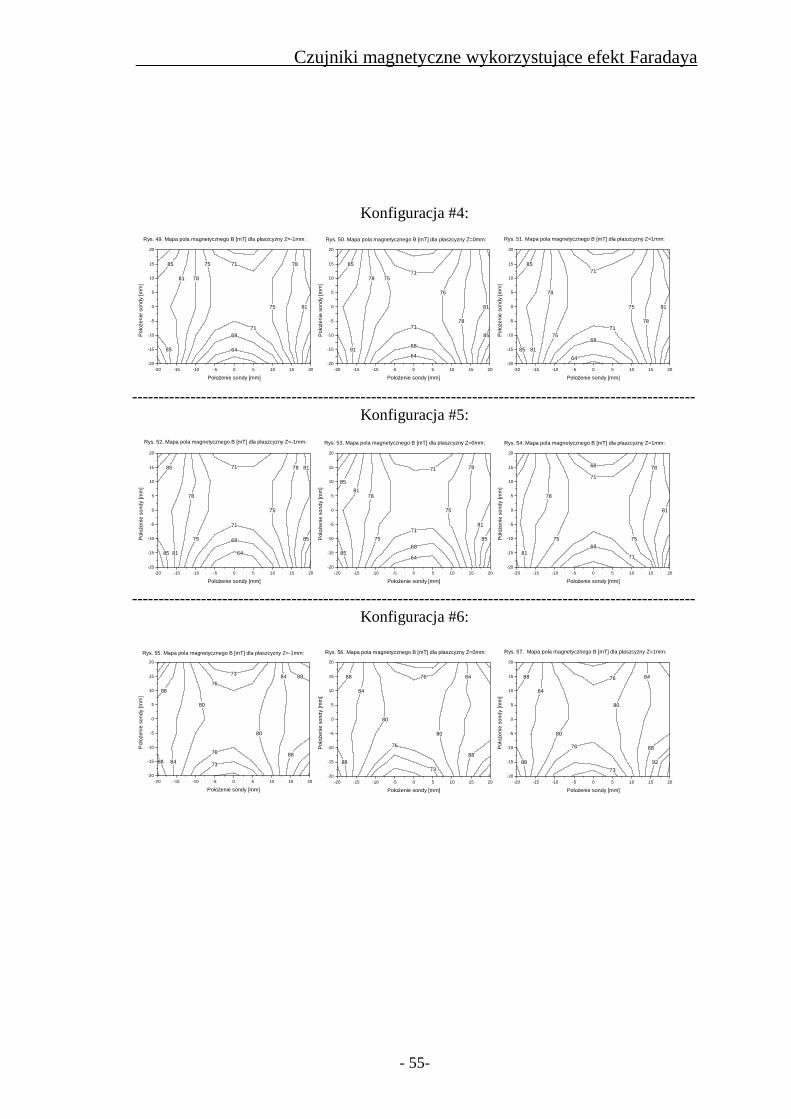
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 55-
Konfiguracja #4:
---------------------------------------------------------------------------------------------------------- Konfiguracja #5:
---------------------------------------------------------------------------------------------------------- Konfiguracja #6:
85
81 78
75
75
71
78
68
81
71
64
85
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 49. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=-1mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
81
78 75
75
7871
81
71
68
85
85
64
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 50. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=0mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
85 81
78
75
75
7871
68
81
71
64
85
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 51. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=1mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
85 81
78
75
75
71
78
68
8171
64
85
85
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 52. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=-1mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
85
8178
75
75
78
71
68
71
81
85
64
85
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 53. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=0mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
81
78
75 75
78
71
71
68
81
68
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 54. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=1mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
88 84
80
80
84
76
76
88
73
88
73 88
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 55. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=-1mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
88
84
80
80
84
76
73
76
88
88
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 56. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=0mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
88
84
80
80
84
76
76
88
73
92
88
-20 -15 -10 -5 0 5 10 15 20-20
-15
-10
-5
0
5
10
15
20
Rys. 57. Mapa pola magnetycznego B [mT] dla płaszcyzny Z=1mm:
Poł
oŜen
ie s
ondy
[mm
]
PołoŜenie sondy [mm]
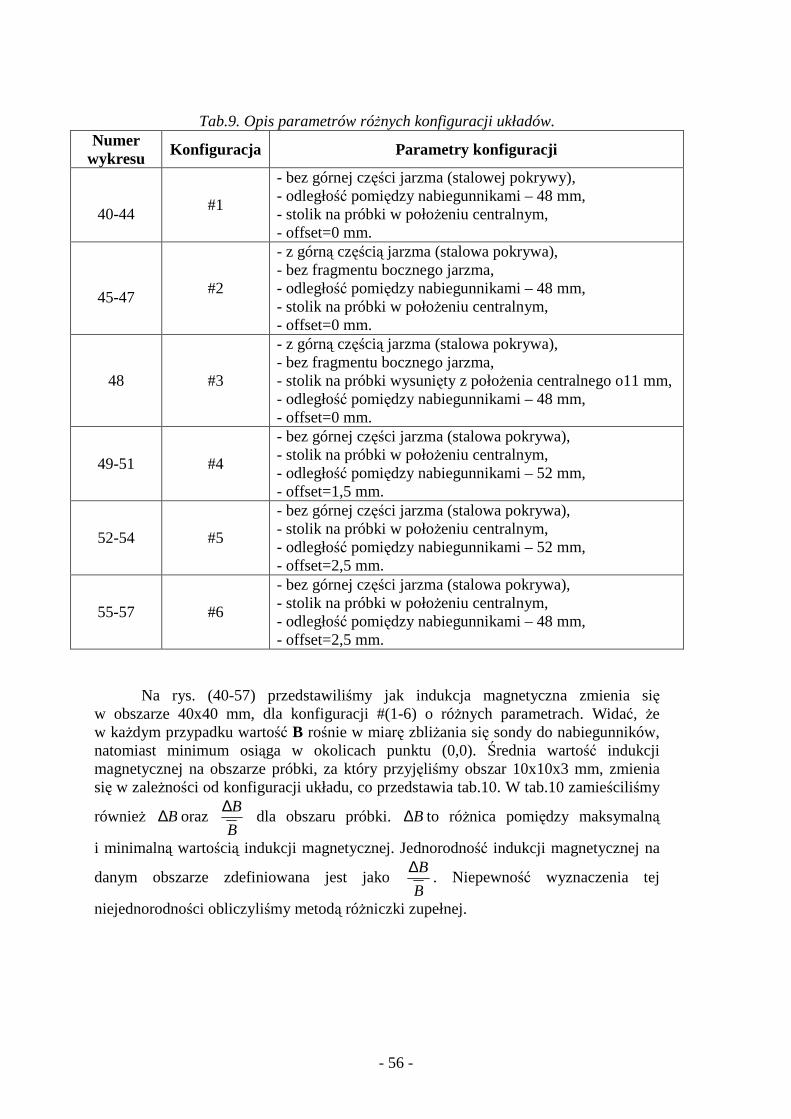
- 56 -
Tab.9. Opis parametrów róŜnych konfiguracji układów.
Numer wykresu
Konfiguracja Parametry konfiguracji
40-44
#1
- bez górnej części jarzma (stalowej pokrywy), - odległość pomiędzy nabiegunnikami – 48 mm, - stolik na próbki w połoŜeniu centralnym, - offset=0 mm.
45-47
#2
- z górną częścią jarzma (stalowa pokrywa), - bez fragmentu bocznego jarzma, - odległość pomiędzy nabiegunnikami – 48 mm, - stolik na próbki w połoŜeniu centralnym, - offset=0 mm.
48 #3
- z górną częścią jarzma (stalowa pokrywa), - bez fragmentu bocznego jarzma, - stolik na próbki wysunięty z połoŜenia centralnego o11 mm, - odległość pomiędzy nabiegunnikami – 48 mm, - offset=0 mm.
49-51 #4
- bez górnej części jarzma (stalowa pokrywa), - stolik na próbki w połoŜeniu centralnym, - odległość pomiędzy nabiegunnikami – 52 mm, - offset=1,5 mm.
52-54 #5
- bez górnej części jarzma (stalowa pokrywa), - stolik na próbki w połoŜeniu centralnym, - odległość pomiędzy nabiegunnikami – 52 mm, - offset=2,5 mm.
55-57 #6
- bez górnej części jarzma (stalowa pokrywa), - stolik na próbki w połoŜeniu centralnym, - odległość pomiędzy nabiegunnikami – 48 mm, - offset=2,5 mm.
Na rys. (40-57) przedstawiliśmy jak indukcja magnetyczna zmienia się
w obszarze 40x40 mm, dla konfiguracji #(1-6) o róŜnych parametrach. Widać, Ŝe w kaŜdym przypadku wartość B rośnie w miarę zbliŜania się sondy do nabiegunników, natomiast minimum osiąga w okolicach punktu (0,0). Średnia wartość indukcji magnetycznej na obszarze próbki, za który przyjęliśmy obszar 10x10x3 mm, zmienia się w zaleŜności od konfiguracji układu, co przedstawia tab.10. W tab.10 zamieściliśmy
równieŜ B∆ oraz B
B∆ dla obszaru próbki. B∆ to róŜnica pomiędzy maksymalną
i minimalną wartością indukcji magnetycznej. Jednorodność indukcji magnetycznej na
danym obszarze zdefiniowana jest jako B
B∆. Niepewność wyznaczenia tej
niejednorodności obliczyliśmy metodą róŜniczki zupełnej.
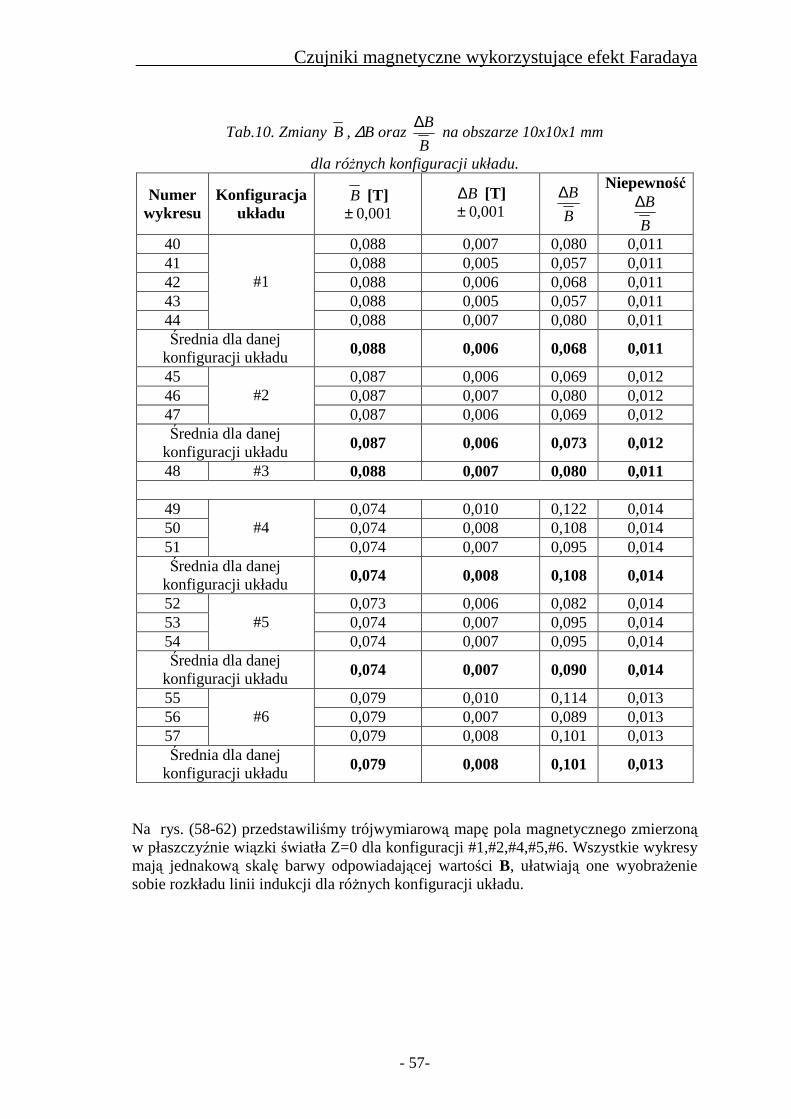
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 57-
Tab.10. Zmiany B , ∆B oraz B
B∆ na obszarze 10x10x1 mm
dla róŜnych konfiguracji układu.
Numer wykresu
Konfiguracja układu
B [T] 001,0±
B∆ [T] 001,0± B
B∆
Niepewność
B
B∆
40 0,088 0,007 0,080 0,011 41 0,088 0,005 0,057 0,011 42 0,088 0,006 0,068 0,011 43 0,088 0,005 0,057 0,011 44
#1
0,088 0,007 0,080 0,011 Średnia dla danej
konfiguracji układu 0,088 0,006 0,068 0,011
45 0,087 0,006 0,069 0,012 46 0,087 0,007 0,080 0,012 47
#2 0,087 0,006 0,069 0,012
Średnia dla danej konfiguracji układu
0,087 0,006 0,073 0,012
48 #3 0,088 0,007 0,080 0,011
49 0,074 0,010 0,122 0,014 50 0,074 0,008 0,108 0,014 51
#4 0,074 0,007 0,095 0,014
Średnia dla danej konfiguracji układu
0,074 0,008 0,108 0,014
52 0,073 0,006 0,082 0,014 53 0,074 0,007 0,095 0,014 54
#5 0,074 0,007 0,095 0,014
Średnia dla danej konfiguracji układu
0,074 0,007 0,090 0,014
55 0,079 0,010 0,114 0,013 56 0,079 0,007 0,089 0,013 57
#6 0,079 0,008 0,101 0,013
Średnia dla danej konfiguracji układu
0,079 0,008 0,101 0,013
Na rys. (58-62) przedstawiliśmy trójwymiarową mapę pola magnetycznego zmierzoną w płaszczyźnie wiązki światła Z=0 dla konfiguracji #1,#2,#4,#5,#6. Wszystkie wykresy mają jednakową skalę barwy odpowiadającej wartości B, ułatwiają one wyobraŜenie sobie rozkładu linii indukcji dla róŜnych konfiguracji układu.
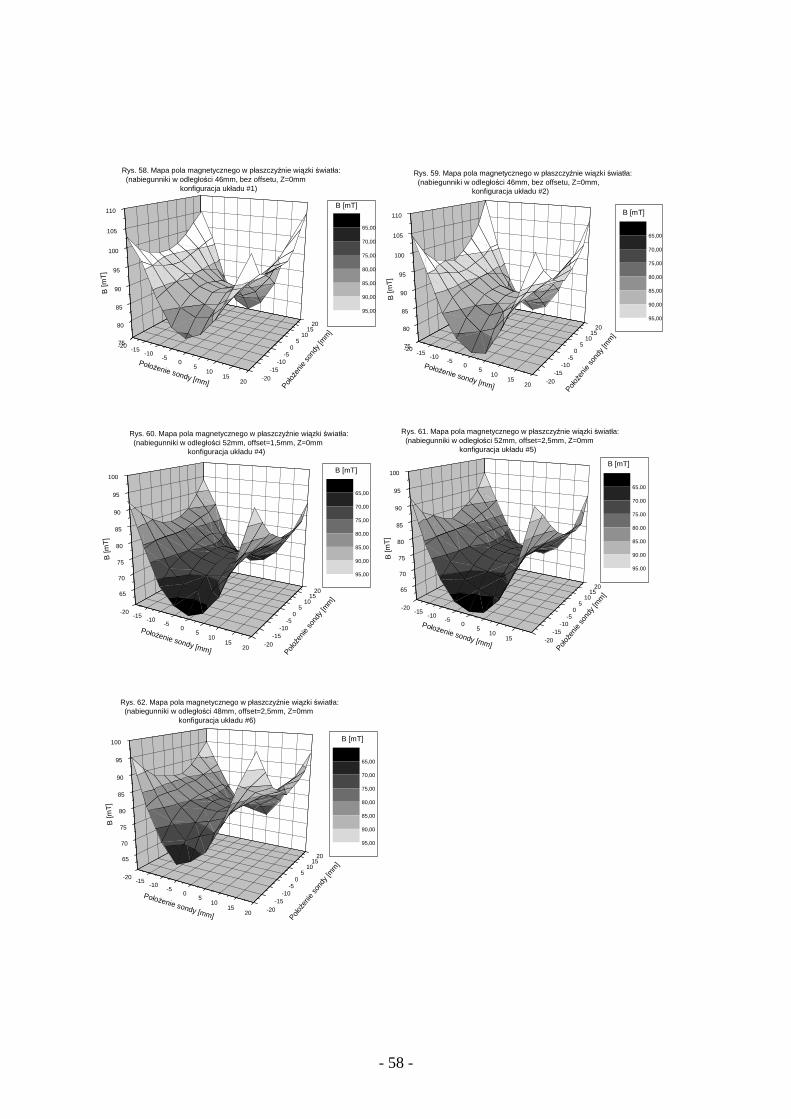
- 58 -
-20-15
-10-5
05
1015
20
75
80
85
90
95
100
105
110
-20-15
-10-5
05
1015
20
B [mT]
Rys. 58. Mapa pola magnetycznego w płaszczyźnie wiązki światła: (nabiegunniki w odległości 46mm, bez offsetu, Z=0mm
konfiguracja układu #1)
B [m
T]
PołoŜ
enie
son
dy [m
m]
PołoŜenie sondy [mm]
65,00
70,00
75,00
80,00
85,00
90,00
95,00
-20-15
-10-5
05
1015
20
75
80
85
90
95
100
105
110
-20-15
-10-5
05
1015
20
B [mT]
Rys. 59. Mapa pola magnetycznego w płaszczyźnie wiązki światła: (nabiegunniki w odległości 46mm, bez offsetu, Z=0mm, konfiguracja układu #2)
B [m
T]
PołoŜ
enie
son
dy [m
m]
PołoŜenie sondy [mm]
65,00
70,00
75,00
80,00
85,00
90,00
95,00
-20-15
-10-5
05
1015
20
65
70
75
80
85
90
95
100
-20-15
-10-5
05
1015
20
Rys. 60. Mapa pola magnetycznego w płaszczyźnie wiązki światła: (nabiegunniki w odległości 52mm, offset=1,5mm, Z=0mm
konfiguracja układu #4)
B [m
T]
PołoŜ
enie
son
dy [m
m]
PołoŜenie sondy [mm]
65,00
70,00
75,00
80,00
85,00
90,00
95,00
B [mT]
-20-15
-10-5
05
1015
65
70
75
80
85
90
95
100
-20-15
-10-5
05
1015
20
Rys. 61. Mapa pola magnetycznego w płaszczyźnie wiązki światła: (nabiegunniki w odległości 52mm, offset=2,5mm, Z=0mm
konfiguracja układu #5)
B [m
T]
PołoŜ
enie
son
dy [m
m]
PołoŜenie sondy [mm]
65.00
70.00
75.00
80.00
85.00
90.00
95.00
B [mT]
-20-15
-10-5
05
1015
20
65
70
75
80
85
90
95
100
-20-15
-10-5
05
1015
20
Rys. 62. Mapa pola magnetycznego w płaszczyźnie wiązki światła: (nabiegunniki w odległości 48mm, offset=2,5mm, Z=0mm
konfiguracja układu #6)
B [m
T]
PołoŜ
enie
son
dy [m
m]
PołoŜenie sondy [mm]
65,00
70,00
75,00
80,00
85,00
90,00
95,00
B [mT]

Czujniki magnetyczne wykorzystujące efekt Faradaya
- 59-
4.3. Pomiar współczynnika odbicia dla luster.
Podstawowymi wielkościami charakteryzującymi własności optyczne cienkich warstw są: współczynnik transmisji T, odbicia R, absorpcji A. Zdefiniowane są one wzorami (3.6). Poza tym właściwości optyczne cienkich warstw są charakteryzowane przez: - współczynnik załamania, - grubość warstwy, - rozpraszanie.
Zbadaliśmy współczynnik odbicia dla luster z naparowaną cienką warstwą Al w zakresie długości fali (190-900) nm. Do badań wykorzystaliśmy ten sam spektrometr który wykorzystywaliśmy do pomiaru współczynników odbicia i transmisji dla szklanej próbki. Przedział próbkowania ustawiliśmy na automatyczny, szerokość szczeliny wejściowej monochromatora na 2 nm a szybkość skanowania na medium. Wyniki pomiarów przedstawiamy na rys. 63.
100 200 300 400 500 600 700 800 900 1000
50
60
70
80
90
100
110
War
tośc
wsp
ółcz
ynni
ka o
dbic
ia [%
]
Długośc fali [nm]
Punkty pomiarowe Punkty pomiarowe
Widmo odbicia dla szklanych luster
Rys. 63. ZaleŜność współczynnika odbicia od długości fali dla luster.
Współczynnik odbicia zmierzony dla luster dla pewnych długości fali (rys. 63) przekracza wartość 100%. Jest to powodowane tym, Ŝe napylona warstwa Al w tych zakresach długości fali odbija lepiej od wzorca, przy pomocy którego wykalibrowano spektrometr. Wzorzec stosowany w celach kalibracji spektrometru musi posiadać liniową zaleŜność R(λ).
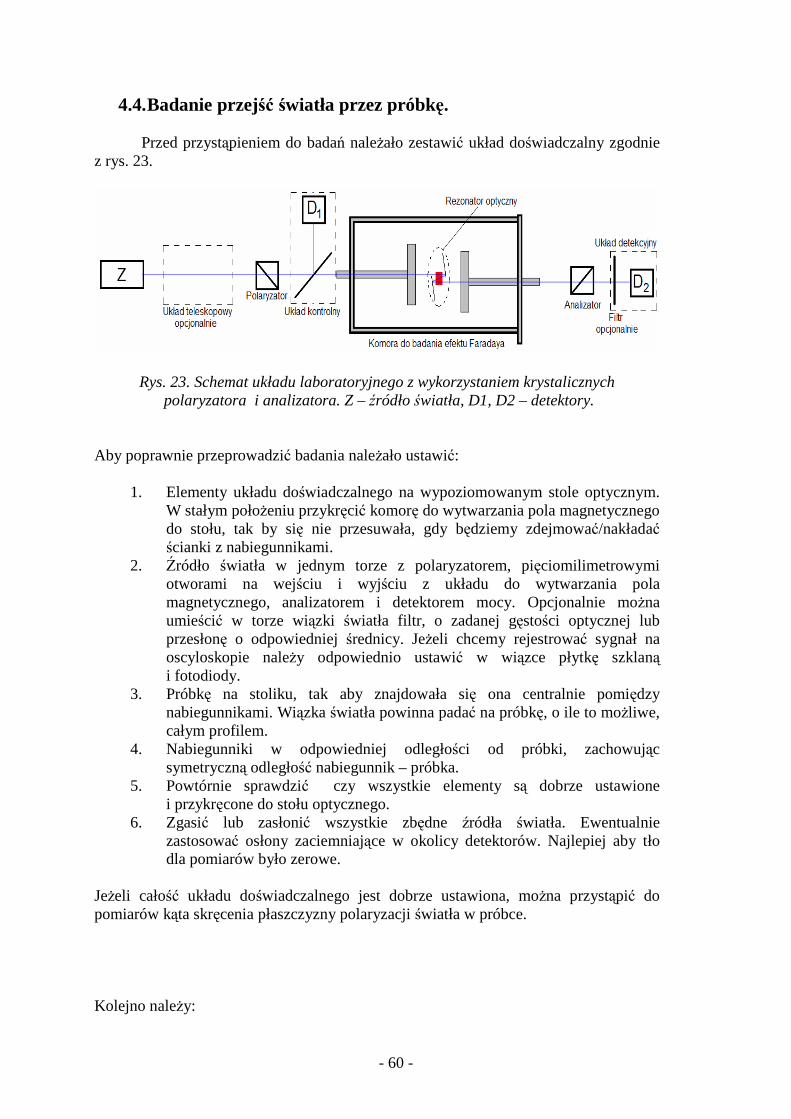
- 60 -
4.4. Badanie przejść światła przez próbkę. Przed przystąpieniem do badań naleŜało zestawić układ doświadczalny zgodnie z rys. 23.
Rys. 23. Schemat układu laboratoryjnego z wykorzystaniem krystalicznych polaryzatora i analizatora. Z – źródło światła, D1, D2 – detektory.
Aby poprawnie przeprowadzić badania naleŜało ustawić:
1. Elementy układu doświadczalnego na wypoziomowanym stole optycznym. W stałym połoŜeniu przykręcić komorę do wytwarzania pola magnetycznego do stołu, tak by się nie przesuwała, gdy będziemy zdejmować/nakładać ścianki z nabiegunnikami.
2. Źródło światła w jednym torze z polaryzatorem, pięciomilimetrowymi otworami na wejściu i wyjściu z układu do wytwarzania pola magnetycznego, analizatorem i detektorem mocy. Opcjonalnie moŜna umieścić w torze wiązki światła filtr, o zadanej gęstości optycznej lub przesłonę o odpowiedniej średnicy. JeŜeli chcemy rejestrować sygnał na oscyloskopie naleŜy odpowiednio ustawić w wiązce płytkę szklaną i fotodiody.
3. Próbkę na stoliku, tak aby znajdowała się ona centralnie pomiędzy nabiegunnikami. Wiązka światła powinna padać na próbkę, o ile to moŜliwe, całym profilem.
4. Nabiegunniki w odpowiedniej odległości od próbki, zachowując symetryczną odległość nabiegunnik – próbka.
5. Powtórnie sprawdzić czy wszystkie elementy są dobrze ustawione i przykręcone do stołu optycznego.
6. Zgasić lub zasłonić wszystkie zbędne źródła światła. Ewentualnie zastosować osłony zaciemniające w okolicy detektorów. Najlepiej aby tło dla pomiarów było zerowe.
JeŜeli całość układu doświadczalnego jest dobrze ustawiona, moŜna przystąpić do pomiarów kąta skręcenia płaszczyzny polaryzacji światła w próbce. Kolejno naleŜy:
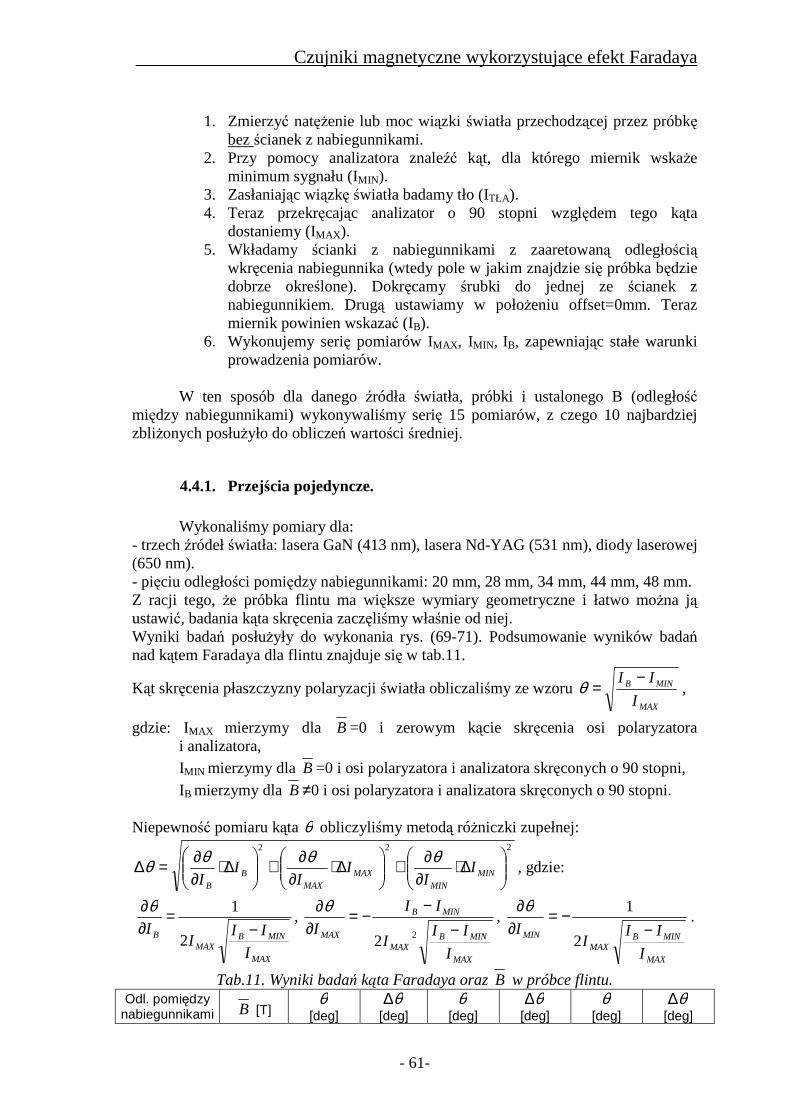
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 61-
1. Zmierzyć natęŜenie lub moc wiązki światła przechodzącej przez próbkę
bez ścianek z nabiegunnikami. 2. Przy pomocy analizatora znaleźć kąt, dla którego miernik wskaŜe
minimum sygnału (IMIN). 3. Zasłaniając wiązkę światła badamy tło (ITŁA). 4. Teraz przekręcając analizator o 90 stopni względem tego kąta
dostaniemy (IMAX ). 5. Wkładamy ścianki z nabiegunnikami z zaaretowaną odległością
wkręcenia nabiegunnika (wtedy pole w jakim znajdzie się próbka będzie dobrze określone). Dokręcamy śrubki do jednej ze ścianek z nabiegunnikiem. Drugą ustawiamy w połoŜeniu offset=0mm. Teraz miernik powinien wskazać (IB).
6. Wykonujemy serię pomiarów IMAX , IMIN, IB, zapewniając stałe warunki prowadzenia pomiarów.
W ten sposób dla danego źródła światła, próbki i ustalonego B (odległość między nabiegunnikami) wykonywaliśmy serię 15 pomiarów, z czego 10 najbardziej zbliŜonych posłuŜyło do obliczeń wartości średniej.
4.4.1. Przejścia pojedyncze. Wykonaliśmy pomiary dla: - trzech źródeł światła: lasera GaN (413 nm), lasera Nd-YAG (531 nm), diody laserowej (650 nm). - pięciu odległości pomiędzy nabiegunnikami: 20 mm, 28 mm, 34 mm, 44 mm, 48 mm. Z racji tego, Ŝe próbka flintu ma większe wymiary geometryczne i łatwo moŜna ją ustawić, badania kąta skręcenia zaczęliśmy właśnie od niej. Wyniki badań posłuŜyły do wykonania rys. (69-71). Podsumowanie wyników badań nad kątem Faradaya dla flintu znajduje się w tab.11.
Kąt skręcenia płaszczyzny polaryzacji światła obliczaliśmy ze wzoru MAX
MINB
I
II −=θ ,
gdzie: IMAX mierzymy dla B =0 i zerowym kącie skręcenia osi polaryzatora i analizatora, IMIN mierzymy dla B =0 i osi polaryzatora i analizatora skręconych o 90 stopni, IB mierzymy dla B ≠0 i osi polaryzatora i analizatora skręconych o 90 stopni. Niepewność pomiaru kąta θ obliczyliśmy metodą róŜniczki zupełnej:
222
∆⋅
∂∂+
∆⋅
∂∂+
∆⋅
∂∂=∆ MIN
MINMAX
MAXB
B
II
II
II
θθθθ , gdzie:
MAX
MINBMAX
B
I
III
I −=
∂∂
2
1θ,
MAX
MINBMAX
MINB
MAX
I
III
II
I −−
−=∂
∂
22
θ,
MAX
MINBMAX
MIN
I
III
I −−=
∂∂
2
1θ.
Tab.11. Wyniki badań kąta Faradaya oraz B w próbce flintu. Odl. pomiędzy
nabiegunnikami B [T] θ
[deg] θ∆
[deg] θ
[deg] θ∆
[deg] θ
[deg] θ∆
[deg]

- 62 -
[mm] 001,0± nm413=λ nm413=λ nm532=λ nm532=λ nm650=λ nm650=λ
52 0,074 3,92 0,08 1,38 0,07 1,07 0,03 48 0,080 4,36 0,08 1,55 0,06 1,12 0,03 38 0,097 5,20 0,08 1,87 0,05 1,36 0,02 32 0,109 5,80 0,07 2,06 0,04 1,55 0,02 24 0,131 7,00 0,07 2,47 0,04 1,82 0,02
Aby wyznaczyć zaleŜności typu ( )Bθ czy ( )λV naleŜało wyznaczyć najpierw
B w samej próbce. W tym celu wykonaliśmy mapy pola na obszarze 3x20 mm wzdłuŜ próbki dla Z=0 i kolejnych odległości pomiędzy nabiegunnikami rys. (64-68). Wyznaczone B znajduje się w tab.11.
Na podstawie danych zawartych w tab.11. powstały rys. (69-71):
0,127 0,128 0,129 0,130 0,131 0,132 0,133 0,134 0,135 0,1360
2
4
6
8
10
12
14
16
18
Β= 0,131 T
Rys. 64. Wykres liczby pomiarów, która dała wynik B dla mapy indukcji magnetycznej zmierzonej w obszarze wiązki przechodzącej przez próbkę
(nabiegunniki w odległości 22mm):
Licz
ba z
liczeń
B [T]0,1084 0,1086 0,1088 0,1090 0,1092 0,1094 0,10960
5
10
15
20
25
Rys. 65. Wykres liczby pomiarów, która dała wynik B dla mapy indukcji magnetycznej zmierzonej w obszarze wiązki przechodzącej przez próbkę
(nabiegunniki w odległości 30mm):
Β= 0,109 TLi
czba
zlic
zeń
B [T]
0,0960 0,0965 0,0970 0,09750
2
4
6
8
10
12
14
16
Rys. 66. Wykres liczby pomiarów, która dała wynik B dla mapy indukcji magnetycznej zmierzonej w obszarze wiązki przechodzącej przez próbkę
(nabiegunniki w odległości 36mm):
Β= 0,097 T
Licz
ba z
liczeń
B [T]
0,078 0,079 0,080 0,081 0,082 0,083 0,084 0,085 0,0860
2
4
6
8
10
Rys. 67. Wykres liczby pomiarów, która dała wynik B dla mapy indukcji magnetycznej zmierzonej w obszarze wiązki przechodzącej przez próbkę
(nabiegunniki w odległości 46mm):
Β= 0,080 T
Licz
ba z
liczeń
B [T]
0,073 0,074 0,075 0,0760
2
4
6
8
10
12
Rys. 68. Wykres liczby pomiarów, która dała wynik B dla mapy indukcji magnetycznej zmierzonej w obszarze wiązki przechodzącej przez próbkę
(nabiegunniki w odległości 50mm):
Β= 0,074 T
Licz
ba z
liczeń
B [T]
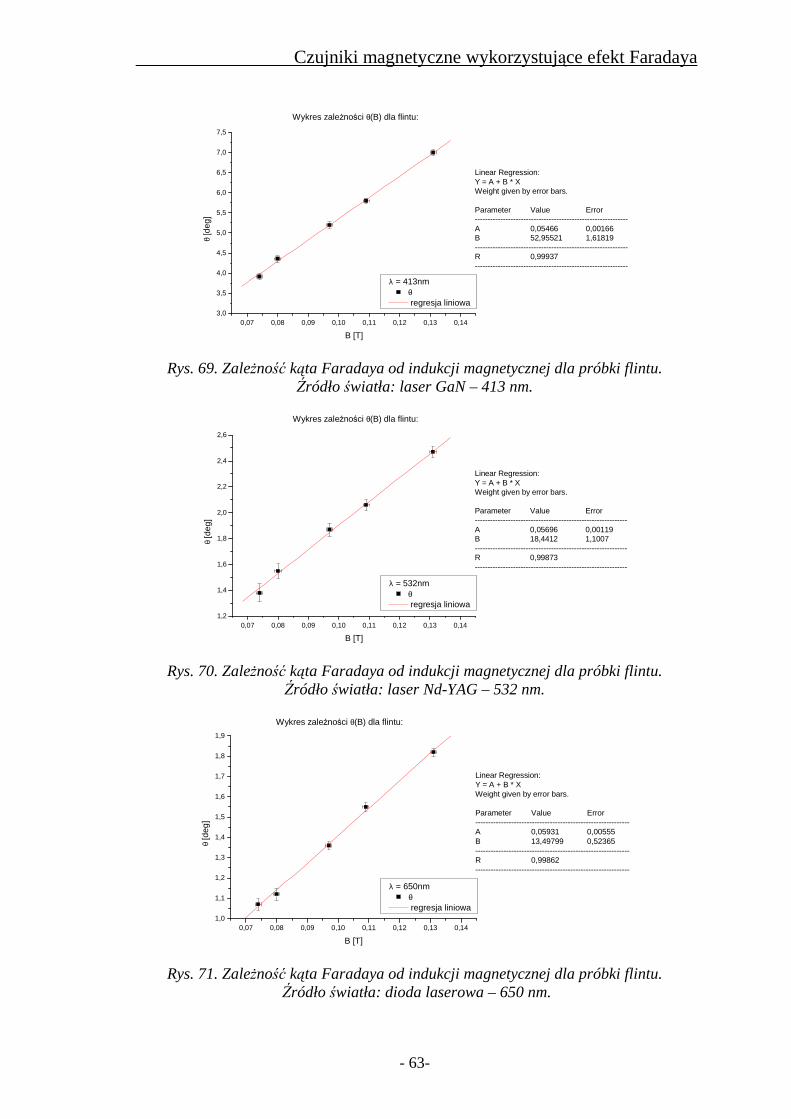
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 63-
0,07 0,08 0,09 0,10 0,11 0,12 0,13 0,143,0
3,5
4,0
4,5
5,0
5,5
6,0
6,5
7,0
7,5
Linear Regression:Y = A + B * XWeight given by error bars.
Parameter Value Error------------------------------------------------------------A 0,05466 0,00166B 52,95521 1,61819------------------------------------------------------------R 0,99937------------------------------------------------------------
λ = 413nmθ regresja liniowa
θ [d
eg]
B [T]
Wykres zaleŜności θ(B) dla flintu:
Rys. 69. ZaleŜność kąta Faradaya od indukcji magnetycznej dla próbki flintu.
Źródło światła: laser GaN – 413 nm.
0,07 0,08 0,09 0,10 0,11 0,12 0,13 0,141,2
1,4
1,6
1,8
2,0
2,2
2,4
2,6
Linear Regression:Y = A + B * XWeight given by error bars.
Parameter Value Error------------------------------------------------------------A 0,05696 0,00119B 18,4412 1,1007------------------------------------------------------------R 0,99873------------------------------------------------------------
Wykres zaleŜności θ(B) dla flintu:
λ = 532nmθ regresja liniowa
θ [d
eg]
B [T]
Rys. 70. ZaleŜność kąta Faradaya od indukcji magnetycznej dla próbki flintu.
Źródło światła: laser Nd-YAG – 532 nm.
0,07 0,08 0,09 0,10 0,11 0,12 0,13 0,141,0
1,1
1,2
1,3
1,4
1,5
1,6
1,7
1,8
1,9
Wykres zaleŜności θ(B) dla flintu:
Linear Regression:Y = A + B * XWeight given by error bars.
Parameter Value Error------------------------------------------------------------A 0,05931 0,00555B 13,49799 0,52365------------------------------------------------------------R 0,99862------------------------------------------------------------
λ = 650nmθ regresja liniowa
θ [d
eg]
B [T]
Rys. 71. ZaleŜność kąta Faradaya od indukcji magnetycznej dla próbki flintu.
Źródło światła: dioda laserowa – 650 nm.
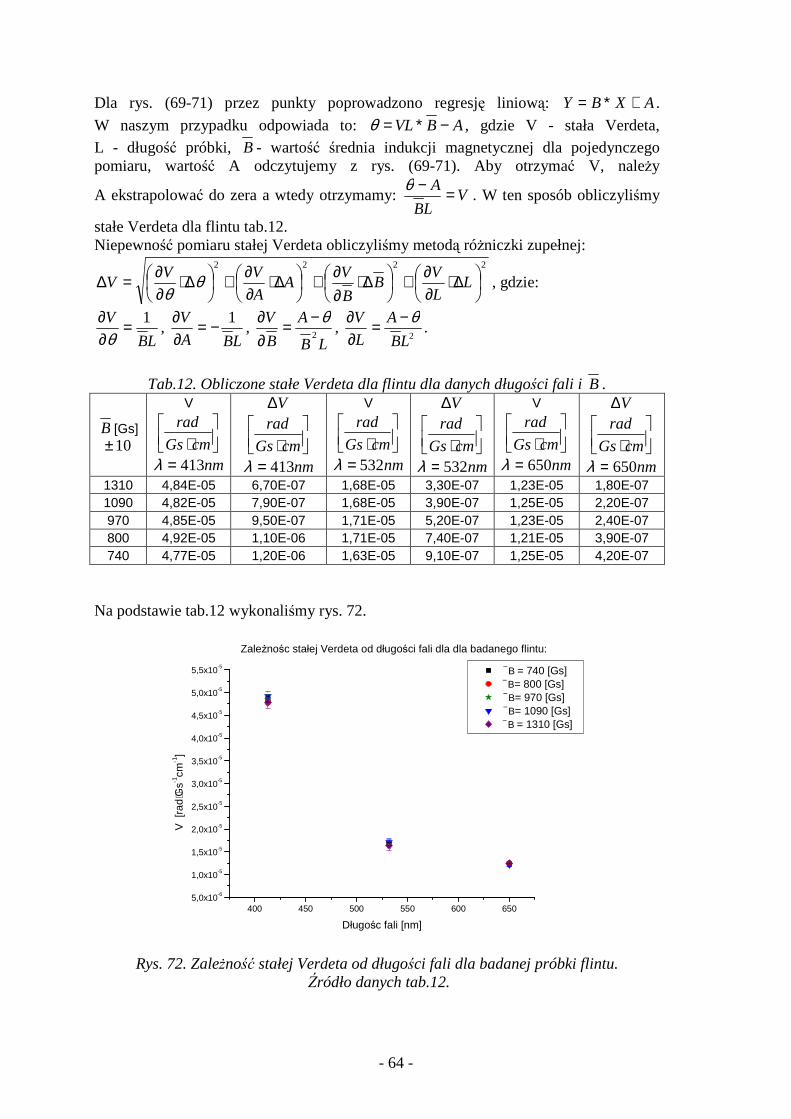
- 64 -
Dla rys. (69-71) przez punkty poprowadzono regresję liniową: AXBY +∗= .
W naszym przypadku odpowiada to: ABVL −∗=θ , gdzie V - stała Verdeta, L - długość próbki, B - wartość średnia indukcji magnetycznej dla pojedynczego pomiaru, wartość A odczytujemy z rys. (69-71). Aby otrzymać V, naleŜy
A ekstrapolować do zera a wtedy otrzymamy: VLB
A =−θ. W ten sposób obliczyliśmy
stałe Verdeta dla flintu tab.12. Niepewność pomiaru stałej Verdeta obliczyliśmy metodą róŜniczki zupełnej:
2222
∆⋅∂∂+
∆⋅∂∂+
∆⋅∂∂+
∆⋅∂∂=∆ L
L
VB
B
VA
A
VVV θ
θ, gdzie:
LB
V 1=∂∂
θ,
LBA
V 1−=∂∂
, LB
A
B
V2
θ−=∂∂
, 2LB
A
L
V θ−=∂∂
.
Tab.12. Obliczone stałe Verdeta dla flintu dla danych długości fali i B .
B [Gs] 10±
V
⋅ cmGs
rad
nm413=λ
V∆
⋅ cmGs
rad
nm413=λ
V
⋅ cmGs
rad
nm532=λ
V∆
⋅ cmGs
rad
nm532=λ
V
⋅ cmGs
rad
nm650=λ
V∆
⋅ cmGs
rad
nm650=λ 1310 4,84E-05 6,70E-07 1,68E-05 3,30E-07 1,23E-05 1,80E-07 1090 4,82E-05 7,90E-07 1,68E-05 3,90E-07 1,25E-05 2,20E-07 970 4,85E-05 9,50E-07 1,71E-05 5,20E-07 1,23E-05 2,40E-07 800 4,92E-05 1,10E-06 1,71E-05 7,40E-07 1,21E-05 3,90E-07 740 4,77E-05 1,20E-06 1,63E-05 9,10E-07 1,25E-05 4,20E-07
Na podstawie tab.12 wykonaliśmy rys. 72.
400 450 500 550 600 6505,0x10-6
1,0x10-5
1,5x10-5
2,0x10-5
2,5x10-5
3,0x10-5
3,5x10-5
4,0x10-5
4,5x10-5
5,0x10-5
5,5x10-5
ZaleŜnośc stałej Verdeta od długości fali dla dla badanego flintu:
Β = 740 [Gs] Β= 800 [Gs] Β= 970 [Gs] Β= 1090 [Gs] Β = 1310 [Gs]
V [
rad⋅
Gs-1
cm-1]
Długośc fali [nm]
Rys. 72. ZaleŜność stałej Verdeta od długości fali dla badanej próbki flintu.
Źródło danych tab.12.

Czujniki magnetyczne wykorzystujące efekt Faradaya
- 65-
Badania kąta Faradaya dla próbki TSAG/TSP. Wykonaliśmy równieŜ pomiary dla próbki TSAG/TSP dla: - jednego źródła światła: lasera Nd-YAG (531 nm). Pozostałe źródła światła były zbyt silnie absorbowane lub rozpraszane przez próbkę i w związku z tym niemoŜliwe było przeprowadzenie dla nich pomiarów. - pięciu odległości pomiędzy nabiegunnikami: 10 mm, 18 mm, 24 mm, 32 mm, 38 mm. Wyniki badań posłuŜyły do wykonania rys. 45. Podsumowanie wyników badań nad kątem Faradaya dla TSAG/TSP znajduje się w tab.13. Ze względu na niewielkie rozmiary próbki, za B przyjęliśmy pojedynczy pomiar indukcji magnetycznej w punkcie, w którym znajdowała się próbka.
Kąt skręcenia płaszczyzny polaryzacji światła obliczaliśmy ze wzoru MAX
MINB
I
II −=θ .
Niepewność pomiaru kąta θ obliczyliśmy metodą róŜniczki zupełnej.
Tab.13. Wyniki badań kąta Faradaya oraz B w próbce TSAG/TSP. Odl. pomiędzy nabiegunnikami
[mm]
B [T] ±0,001
θ [deg]
nm532=λ
θ∆ [deg]
nm532=λ 10 0,174 7,29 0,37 18 0,141 6,05 0,37 24 0,123 5,23 0,40 32 0,103 4,27 0,51 38 0,091 3,90 0,66
Na podstawie danych zawartych w tab.13. powstał rys. 73:
0,08 0,09 0,10 0,11 0,12 0,13 0,14 0,15 0,16 0,17 0,18 0,193,0
3,5
4,0
4,5
5,0
5,5
6,0
6,5
7,0
7,5
8,0
Wykres zaleŜności θ(B) dla TSAG/TSP:
Linear Regression:Y = A + B * XWeight given by error bars.
Parameter Value Error------------------------------------------------------------A 0,08672 0,00967B 41,68046 6,9636------------------------------------------------------------R 0,99831------------------------------------------------------------
λ = 532nmθ regresja liniowa
θ [d
eg]
B [T]
Rys.73 . ZaleŜność kąta Faradaya od indukcji magnetycznej dla próbki TSAG/TSP. Źródło światła: laser Nd-YAG – 532 nm.
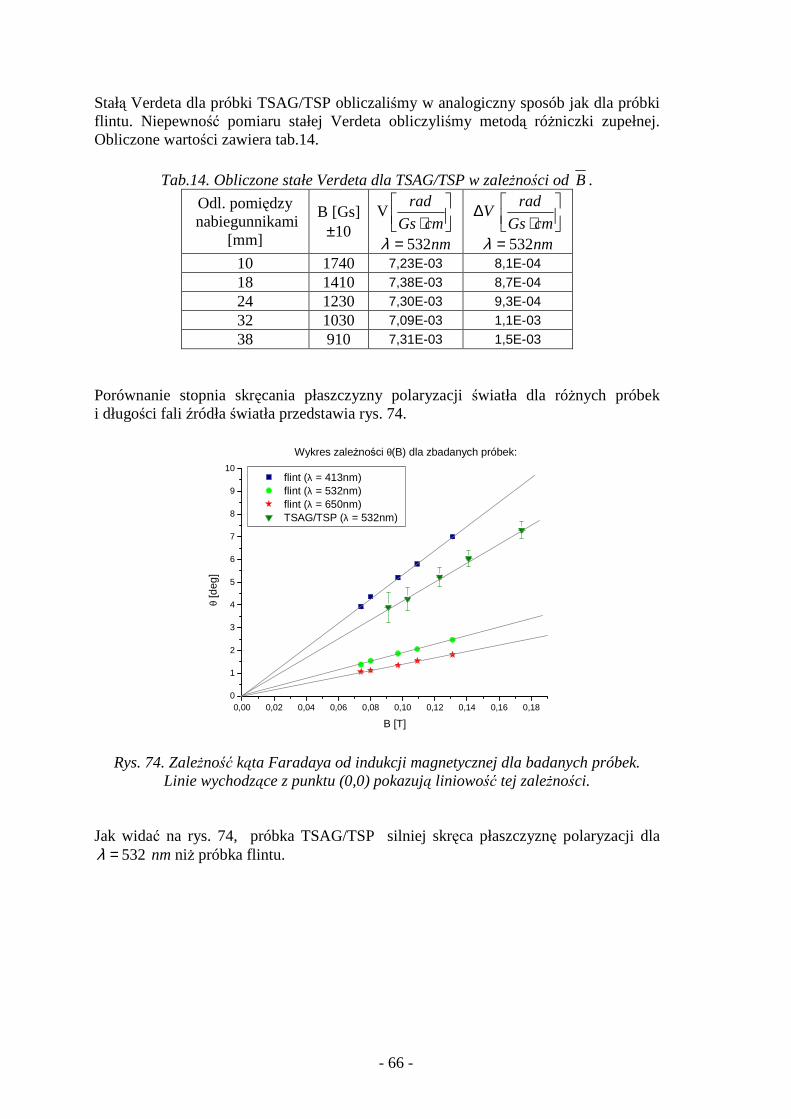
- 66 -
Stałą Verdeta dla próbki TSAG/TSP obliczaliśmy w analogiczny sposób jak dla próbki flintu. Niepewność pomiaru stałej Verdeta obliczyliśmy metodą róŜniczki zupełnej. Obliczone wartości zawiera tab.14.
Tab.14. Obliczone stałe Verdeta dla TSAG/TSP w zaleŜności od B .
Odl. pomiędzy nabiegunnikami
[mm]
B [Gs] ±10
V
⋅ cmGs
rad
nm532=λ
V∆
⋅ cmGs
rad
nm532=λ 10 1740 7,23E-03 8,1E-04
18 1410 7,38E-03 8,7E-04
24 1230 7,30E-03 9,3E-04
32 1030 7,09E-03 1,1E-03
38 910 7,31E-03 1,5E-03
Porównanie stopnia skręcania płaszczyzny polaryzacji światła dla róŜnych próbek i długości fali źródła światła przedstawia rys. 74.
0,00 0,02 0,04 0,06 0,08 0,10 0,12 0,14 0,16 0,180
1
2
3
4
5
6
7
8
9
10
Wykres zaleŜności θ(B) dla zbadanych próbek:
flint (λ = 413nm) flint (λ = 532nm) flint (λ = 650nm) TSAG/TSP (λ = 532nm)
θ [d
eg]
B [T]
Rys. 74. ZaleŜność kąta Faradaya od indukcji magnetycznej dla badanych próbek.
Linie wychodzące z punktu (0,0) pokazują liniowość tej zaleŜności. Jak widać na rys. 74, próbka TSAG/TSP silniej skręca płaszczyznę polaryzacji dla
532=λ nm niŜ próbka flintu.

Czujniki magnetyczne wykorzystujące efekt Faradaya
- 67-
4.4.2. Przejścia wielokrotne.
Do badania kąta Faradaya przy wielokrotnym przejściu światła przez próbkę wykorzystywaliśmy układ luster przedstawiony rys. 27.
Rys. 27. Schemat układu dwóch równoległych luster zwielokratniających przejście wiązki światła przez próbkę. α – kąt padania wiązki na próbkę, l – odległość pomiędzy
lustrami, ∆ – wartość wysunięcia ścianki z symetrycznego połoŜenia (offset), K1 i K2 - ścięta krawędź lustra.
Do sterowania kątem padania wiązki światła na próbkę wykorzystujemy układ ruchomego stolika na próbki z przykręconą do niego dźwignią. Dźwignię moŜna precyzyjnie przesuwać za pomocą śruby mikrometrycznej i w ten sposób przekręcać stolik wraz z przyklejoną do niego próbką. Ideę przedstawia rys. 75:
Rys. 75. Zdjęcie stolika na próbkę oraz schemat obrotu stolika o kąt α.
Lm – długość wykręconego trzpienia śruby mikrometrycznej,
Ld – odległość od środka próbki do środka trzpienia śruby mikrometrycznej.
Kąt α obliczaliśmy korzystając z zaleŜności d
m
L
Larctg=α .
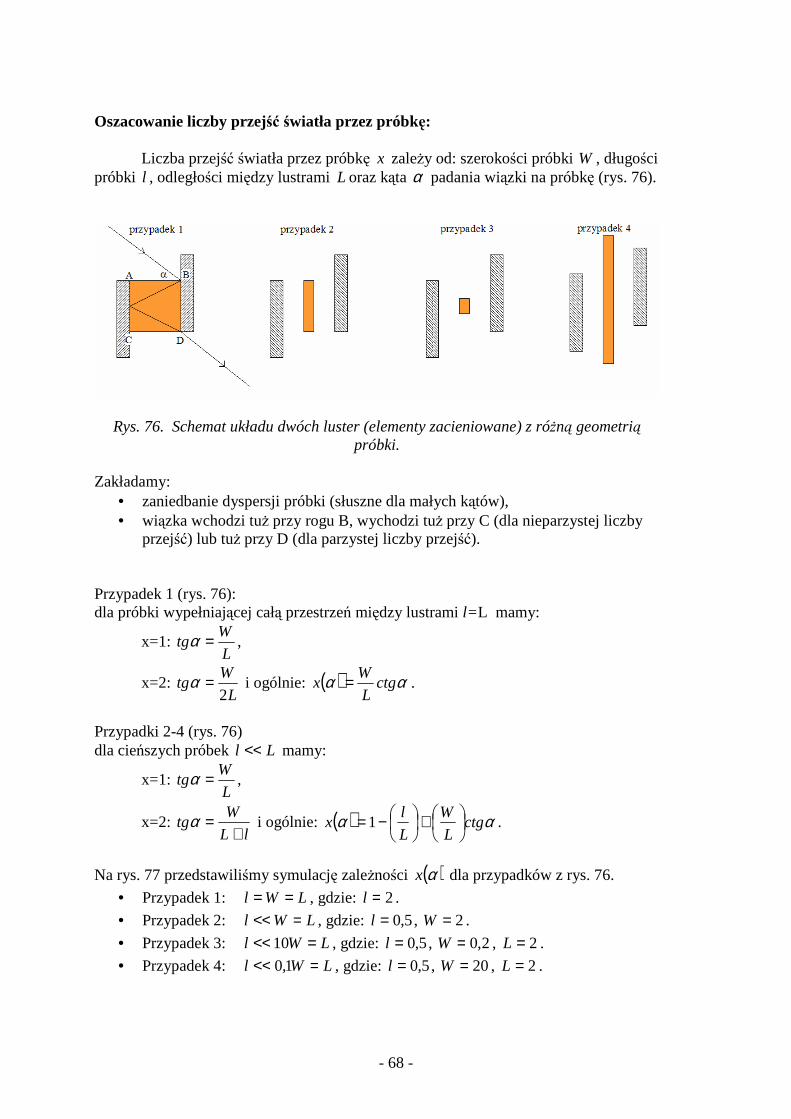
- 68 -
Oszacowanie liczby przejść światła przez próbkę: Liczba przejść światła przez próbkę x zaleŜy od: szerokości próbki W , długości próbki l , odległości między lustrami L oraz kąta α padania wiązki na próbkę (rys. 76).
Rys. 76. Schemat układu dwóch luster (elementy zacieniowane) z róŜną geometrią próbki.
Zakładamy:
• zaniedbanie dyspersji próbki (słuszne dla małych kątów), • wiązka wchodzi tuŜ przy rogu B, wychodzi tuŜ przy C (dla nieparzystej liczby
przejść) lub tuŜ przy D (dla parzystej liczby przejść). Przypadek 1 (rys. 76): dla próbki wypełniającej całą przestrzeń między lustrami l=L mamy:
x=1: L
Wtg =α ,
x=2: L
Wtg
2=α i ogólnie: ( ) αα ctg
L
Wx = .
Przypadki 2-4 (rys. 76) dla cieńszych próbek Ll << mamy:
x=1: L
Wtg =α ,
x=2: lL
Wtg
+=α i ogólnie: ( ) αα ctg
L
W
L
lx
+
−= 1 .
Na rys. 77 przedstawiliśmy symulację zaleŜności ( )αx dla przypadków z rys. 76.
• Przypadek 1: LWl == , gdzie: 2=l .
• Przypadek 2: LWl =<< , gdzie: 5,0=l , 2=W .
• Przypadek 3: LWl =<< 10 , gdzie: 5,0=l , 2,0=W , 2=L .
• Przypadek 4: LWl =<< 1,0 , gdzie: 5,0=l , 20=W , 2=L .
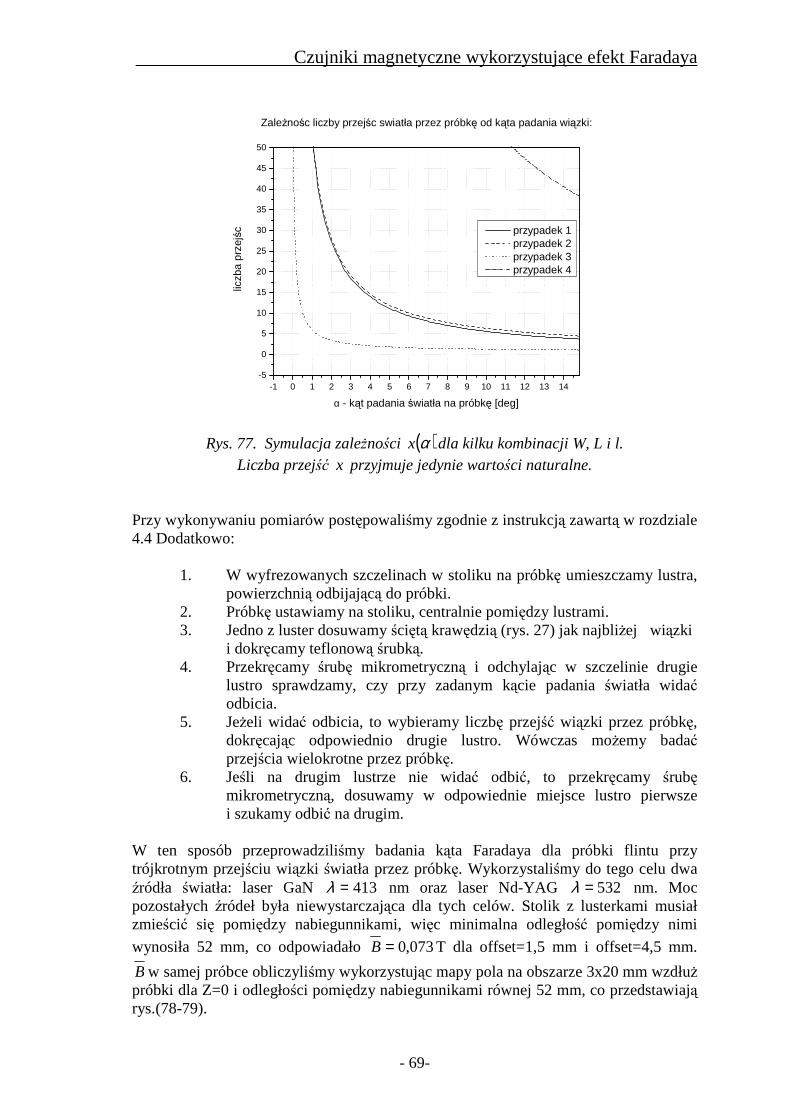
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 69-
-1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14-5
0
5
10
15
20
25
30
35
40
45
50
liczb
a pr
zejś
c
α - kąt padania światła na próbkę [deg]
przypadek 1 przypadek 2 przypadek 3 przypadek 4
ZaleŜnośc liczby przejśc swiatła przez próbkę od kąta padania wiązki:
Rys. 77. Symulacja zaleŜności ( )αx dla kilku kombinacji W, L i l.
Liczba przejść x przyjmuje jedynie wartości naturalne.
Przy wykonywaniu pomiarów postępowaliśmy zgodnie z instrukcją zawartą w rozdziale 4.4 Dodatkowo:
1. W wyfrezowanych szczelinach w stoliku na próbkę umieszczamy lustra, powierzchnią odbijającą do próbki. 2. Próbkę ustawiamy na stoliku, centralnie pomiędzy lustrami. 3. Jedno z luster dosuwamy ściętą krawędzią (rys. 27) jak najbliŜej wiązki i dokręcamy teflonową śrubką. 4. Przekręcamy śrubę mikrometryczną i odchylając w szczelinie drugie lustro sprawdzamy, czy przy zadanym kącie padania światła widać odbicia. 5. JeŜeli widać odbicia, to wybieramy liczbę przejść wiązki przez próbkę, dokręcając odpowiednio drugie lustro. Wówczas moŜemy badać przejścia wielokrotne przez próbkę. 6. Jeśli na drugim lustrze nie widać odbić, to przekręcamy śrubę mikrometryczną, dosuwamy w odpowiednie miejsce lustro pierwsze i szukamy odbić na drugim.
W ten sposób przeprowadziliśmy badania kąta Faradaya dla próbki flintu przy trójkrotnym przejściu wiązki światła przez próbkę. Wykorzystaliśmy do tego celu dwa źródła światła: laser GaN 413=λ nm oraz laser Nd-YAG 532=λ nm. Moc pozostałych źródeł była niewystarczająca dla tych celów. Stolik z lusterkami musiał zmieścić się pomiędzy nabiegunnikami, więc minimalna odległość pomiędzy nimi
wynosiła 52 mm, co odpowiadało 073,0=B T dla offset=1,5 mm i offset=4,5 mm.
B w samej próbce obliczyliśmy wykorzystując mapy pola na obszarze 3x20 mm wzdłuŜ próbki dla Z=0 i odległości pomiędzy nabiegunnikami równej 52 mm, co przedstawiają rys.(78-79).
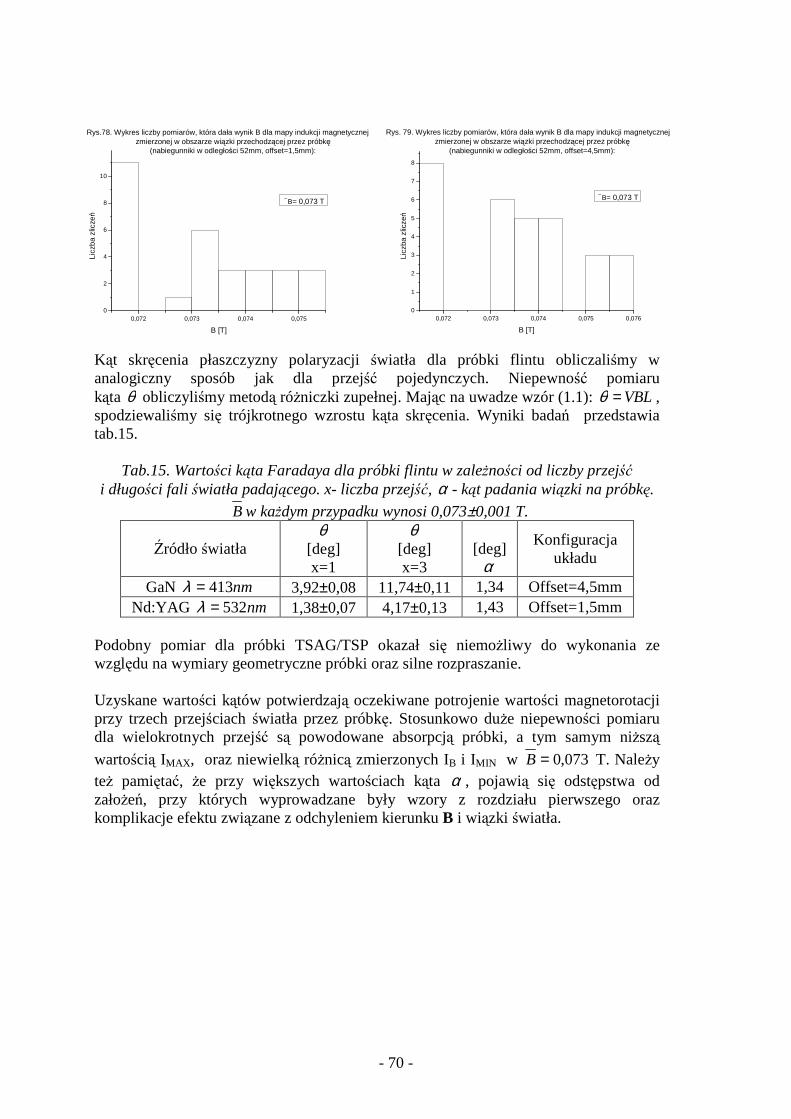
- 70 -
Kąt skręcenia płaszczyzny polaryzacji światła dla próbki flintu obliczaliśmy w analogiczny sposób jak dla przejść pojedynczych. Niepewność pomiaru kąta θ obliczyliśmy metodą róŜniczki zupełnej. Mając na uwadze wzór (1.1): VBL=θ , spodziewaliśmy się trójkrotnego wzrostu kąta skręcenia. Wyniki badań przedstawia tab.15.
Tab.15. Wartości kąta Faradaya dla próbki flintu w zaleŜności od liczby przejść i długości fali światła padającego. x- liczba przejść, α - kąt padania wiązki na próbkę.
B w kaŜdym przypadku wynosi 0,073±0,001 T.
Źródło światła θ
[deg] x=1
θ [deg] x=3
[deg]
α
Konfiguracja układu
GaN nm413=λ 3,92±0,08 11,74±0,11 1,34 Offset=4,5mm Nd:YAG nm532=λ 1,38±0,07 4,17±0,13 1,43 Offset=1,5mm
Podobny pomiar dla próbki TSAG/TSP okazał się niemoŜliwy do wykonania ze względu na wymiary geometryczne próbki oraz silne rozpraszanie. Uzyskane wartości kątów potwierdzają oczekiwane potrojenie wartości magnetorotacji przy trzech przejściach światła przez próbkę. Stosunkowo duŜe niepewności pomiaru dla wielokrotnych przejść są powodowane absorpcją próbki, a tym samym niŜszą
wartością IMAX , oraz niewielką róŜnicą zmierzonych IB i IMIN w 073,0=B T. NaleŜy teŜ pamiętać, Ŝe przy większych wartościach kąta α , pojawią się odstępstwa od załoŜeń, przy których wyprowadzane były wzory z rozdziału pierwszego oraz komplikacje efektu związane z odchyleniem kierunku B i wiązki światła.
0,072 0,073 0,074 0,0750
2
4
6
8
10
Β= 0,073 T
Rys.78. Wykres liczby pomiarów, która dała wynik B dla mapy indukcji magnetycznej zmierzonej w obszarze wiązki przechodzącej przez próbkę
(nabiegunniki w odległości 52mm, offset=1,5mm):
Licz
ba z
liczeń
B [T]
0,072 0,073 0,074 0,075 0,0760
1
2
3
4
5
6
7
8
Rys. 79. Wykres liczby pomiarów, która dała wynik B dla mapy indukcji magnetycznej zmierzonej w obszarze wiązki przechodzącej przez próbkę
(nabiegunniki w odległości 52mm, offset=4,5mm):
Β= 0,073 T
Licz
ba z
liczeń
B [T]

Czujniki magnetyczne wykorzystujące efekt Faradaya
- 71-
5. Analiza i dyskusja wyników. RozwaŜania dotyczące podrozdziału 2.2. W rozdziale 2 (Symulacje właściwości magnetycznych układu doświadczalnego) przedstawiliśmy symulacje właściwości magnetycznych komory do wytwarzania pola magnetycznego. Symulacje przeprowadzaliśmy na modelu komory wybranym spośród kilku projektów, aby dowiedzieć się, czy będzie on spełniał nasze załoŜenia i czy moŜliwe będzie wykorzystanie go do badań skręcenia płaszczyzny polaryzacji w róŜnych próbkach. Nasz rzeczywisty układ róŜni się od tego modelowanego: - jest trójwymiarowy (np. FEMM nie uwzględnia w obliczeniach stalowej podstawy jarzma), - elementy układu są bardziej skomplikowane (np. głowice z magnesami neodymowymi zostały przedstawione w FEMM jako jednorodny obszar), - nie znamy wszystkich właściwości materiałowych wyŜarzanej stali, z której zbudowane jest jarzmo, - pomiędzy ścianami jarzma i pozostałych elementów znajduje się diamagnetyk – powietrze – które zaburza linie pola magnetycznego. Mimo to, przeprowadzone symulacje w dwóch wymiarach okazały się bardzo pomocne w kolejnych etapach projektowania komory. Przeprowadzone symulacje zwróciły naszą uwagę na problem doboru materiałów, kształtów elementów układu oraz samą geometrię całości. Projektując komorę do wytwarzania pola magnetycznego szczególną uwagę zwracaliśmy na to, aby indukcja magnetyczna oraz jednorodność uzyskanego pola magnetycznego w obszarze próbki były moŜliwie największe. Mając na uwadze powyŜsze załoŜenia i opierając się na symulacjach generowanych w programie FEMM dokonaliśmy wyboru odpowiedniej konfiguracji jarzma komory oraz nakładek na nabiegunniki, których zadaniem było ujednorodnianie pola magnetycznego w obszarze próbki. Proponowany przez nas układ do badań skręcenia płaszczyzny polaryzacji światła (rys. 25) posiada symetryczną konstrukcję prostopadłościanu, dzięki czemu w obszarze próbki uzyskamy większą wartość indukcji magnetycznej. Wybrane przez nas uniwersalne nakładki na nabiegunniki (tab. 2), posiadają taką konstrukcję, aby ∆L czyli zakres przekrywania się B|| i B⊥⊥⊥⊥ był maksymalny, przy jednocześnie duŜej jednorodności. Wyniki symulacji zaleŜności zmian B(L) dla róŜnych offsetów14 (rys. 21) pokazują, Ŝe niewielka asymetria pozioma w połoŜeniu nabiegunników nie wpływa znacząco na warunki samego pomiaru kąta Faradaya i zaproponowana przez nas koncepcja wielokrotnego przejścia wiązki światła przez próbkę powinna się sprawdzić. 14 Offset - wielkość poziomego, równoległego przesunięcia nabiegunników względem siebie, ich asymetrii połoŜenia. Przykładowo offset=1,5mm oznacza, Ŝe po przesunięciu ruchomej ścianki jarzma z nabiegunnikiem tor wiązki wychodzącej jest przesunięty o 1,5 mm w stosunku do toru wiązki padającej. Nabiegunniki są „w offsecie”, gdy rozpatrujemy przejścia wielokrotne przez próbkę.
- 72 -
RozwaŜania dotyczące podrozdziału 2.3. Wykonaną, zgodnie z załoŜeniami dyskutowanymi w rozdziale trzecim, komorę do wytwarzania pola magnetycznego naleŜało zbadać pod kątem zgodności z modelem teoretycznym (symulacje). Zbadaliśmy zaleŜność indukcji magnetycznej od odległości pomiędzy nabiegunnikami, co przedstawia rys. 38. Maksymalne pole jakie moŜna wytworzyć w zaprojektowanej komorze to 0,25 T, natomiast przeprowadzone symulacje FEMM dla tegoŜ układu wskazywały na 0,27 T. Choć symulacje rozkładu indukcji magnetycznej w komorze były przeprowadzane w dwóch wymiarach to wartości B teoretyczna i zmierzona są zbliŜone. Świadczy to o poprawności przeprowadzonych symulacji. RóŜnica wielkości indukcji magnetycznych: 0,02 T jest niewielka, biorąc pod uwagę niezupełną zgodność właściwości materiału (stal) stosowanego na jarzmo dla komory rzeczywistej i modelowej oraz to, Ŝe indukcja modelowana była dla uproszczonego szkicu układu. Otrzymane wartości B dla modelu teoretycznego oraz rzeczywistego układu pokazują, Ŝe przy tego typu przedsięwzięciach teoretyczne rozwaŜania nad geometrią oraz typem i właściwościami materiałów są bardzo pomocne. Symulacje zapobiegają błędom konstrukcyjnym oraz umoŜliwiają odpowiedni dobór właściwości materiałów w celach optymalizacji projektowanego układu. Komora została zaprojektowana i zbudowana w celu wykorzystania jej do badań kąta Faradaya w róŜnych próbkach. Tak więc to, co było dla nas szczególnie istotne, to nie osiągnięcie maksymalnej wielkości B ale wielkość oraz jednorodność indukcji magnetycznej na obszarze, w którym miałaby znajdować się próbka. Zbadaliśmy więc owe wielkości na obszarze 40x40x5 mm w miejscu, gdzie znajdował się stolik na próbkę. Badania przeprowadzaliśmy dla sześciu konfiguracji układu o róŜnych parametrach (podrozdział 4.2). Na rys. (40-57), tzw. mapach pola magnetycznego, przedstawiliśmy jak indukcja magnetyczna zmienia się w obszarze 40x40 mm, dla konfiguracji #(1-6). W kaŜdym przypadku wartość B rośnie w miarę zbliŜania się sondy do nabiegunników, natomiast minimum osiąga w okolicach punktu środkowego (0,0) rys. 39. Wartość średnią indukcji magnetycznej obliczyliśmy dla mniejszego obszaru: 10x10x3 mm, co przedstawia tab. 10. Obszar ten wybraliśmy ze względu na wymiary geometryczne naszych próbek. W tab. 10 zamieściliśmy równieŜ
B∆ oraz B
B∆ dla obszaru próbki, za który przyjęliśmy 10x10x3 mm. Trójwymiarowe
mapy pola magnetycznego (rys. 58-62) przedstawiają rozkład linii indukcji dla róŜnych konfiguracji układu. Analizując owe wykresy oraz tab.10, jako pierwsze moŜna zauwaŜyć, Ŝe wartości indukcji magnetycznej dla konfiguracji układu #(1-3) jest większa od tej dla pozostałych konfiguracji. Jest to róŜnica rzędu 0,01 T i wynika z tego, Ŝe w konfiguracjach #(4-6) ustawiliśmy offset róŜny od zera. Jeśli dodatkowo oddalimy nabiegunniki na 52 mm, to ta róŜnica wzrośnie, co widać dla konfiguracji #(4-5). W granicy niepewności pomiarowych, dla stałej odległości nabiegunników równej 48 mm, w układach o parametrach danych #1, #2 i #3 wartości B są porównywalne. Podobnie jest dla konfiguracji #(4-5) choć wartości B są niŜsze, ze względu na większą odległość pomiędzy nabiegunnikami. Dla parametrów układu #3, wartość średnia indukcji nie jest niŜsza, niŜ przy symetrycznym ustawieniu stolika. Jeśli chodzi o warunki #2 to widać, Ŝe stalowa pokrywa nie wpływa na wzrost B , a być moŜe nawet nieco obniŜa średnią wartość indukcji w obszarze próbki (musimy pamiętać, Ŝe
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 73-
w trakcie pomiarów zdjęty był fragment ściany bocznej jarzma). Gdybyśmy całkowicie zamknęli układ jarzma, to mogłoby się okazać, Ŝe B ma wyŜszą wartość. Nie mogliśmy jednak tego sprawdzić, ze względu na wymiary geometryczne sondy Halla. Dopiero podczas badań skręcenia płaszczyzny polaryzacji okazało się, Ŝe nie warto ich wykonywać z całkowicie zamkniętym jarzmem, poniewaŜ wartość B jaką wskazywał miernik mocy (dla IB) nie zmieniała się. Porównując wartości B w konfiguracji #5 i #4 (odległość pomiędzy nabiegunnikami: 52 mm) moŜna stwierdzić, Ŝe dla niewielkiej wartości offsetu średnia wartość indukcji na danym obszarze pozostaje stała. JeŜeli chodzi o jednorodność indukcji magnetycznej na obszarze próbki, to dla konfiguracji bez offsetu #(1-3) jest ona większa niŜ dla konfiguracji w offsecie #(4-6) – tab. 10, jednak nie na tyle, aby uniemoŜliwi ć pomiary kąta θ dla wielokrotnych przejść. Jednorodność dla danej odległości pomiędzy nabiegunnikami, w granicach niepewności, jest stała. Z powyŜszej analizy wynika, Ŝe zarówno wartość średnia indukcji magnetycznej jak i jednorodność pola na obszarze próbki są, w granicach niepewności pomiarowych, zbieŜne dla odpowiednich konfiguracji układu. Średnia indukcja oraz jednorodność pola dla konfiguracji z offsetem większym od zera są odpowiednio mniejsze, niŜ dla konfiguracji bez offsetu. Nie są to jednakŜe wartości, które mogłyby wykluczać przeprowadzanie badań kąta Faradaya dla róŜnych próbek w owych konfiguracjach. Podsumowując, badania kąta skręcenia płaszczyzny polaryzacji, przy wykorzystaniu naszej komory, moŜna przeprowadzać w praktycznie dowolnej, wygodnej dla uŜytkownika konfiguracji. Oczywiście w rozsądnych granicach. RozwaŜania dotyczące podrozdziału 4.4.1.
Badania kąta Faradaya dla próbek. W celu zbadania kąta skręcenia płaszczyzny polaryzacji w próbkach, zestawiliśmy układ doświadczalny zgodnie z rys. 23, a wykonując kolejne serie pomiarów postępowaliśmy zgodnie ze wskazówkami zawartymi w podrozdziale 4.4. Podczas badań wykorzystywaliśmy wszystkie dostępne źródła światła, których opis moŜna znaleźć w podrozdziale 3.5. Jednak, co się okazało podczas wstępnych pomiarów, nie wszystkie źródła światła spełniały warunki konieczne dla przeprowadzenia tego typu eksperymentu. Źródła których nie mogliśmy wykorzystywać z róŜnych względów, o których będzie mowa, to: laser He-Ne oraz diody HB LED. Laser He-Ne z układem stabilizującym polaryzację pomimo swych wielu zalet posiadał jedną, powaŜną wadę, mianowicie zbyt duŜą niestabilność mocy. Owa niestabilność mocy była na tyle duŜa, Ŝe uniemoŜliwiała otrzymanie powtarzalnych wyników pomiaru kąta θ . Aby pozbyć się fluktuacji mocy lasera zastosowaliśmy dodatkowy układ, nazwany przez nas układem kontrolnym rys. 23, opisanym w rozdziale 3, którego ideę przedstawia rys. 24. Pomysł ten nie rozwiązał problemu, poniewaŜ czułość oscyloskopu musieliśmy zmniejszyć w taki sposób, aby wartości IMIN,
IMAX , IB były widoczne na jego ekranie. Wielkości napięć sczytywane przez oscyloskop dla IB oraz IMIN były wówczas zbyt małe, Ŝeby dokładnie zmierzyć ich róŜnice, co uniemoŜliwiało poprawne obliczenie kąta skręcenia. Z tego względu ten laser okazał się nieuŜyteczny. Natomiast podstawowym problemem, który pojawił się przy wykorzystaniu diod, dla naszych celów, była zbyt duŜa rozbieŜność wiązki światła. Aby ją zminimalizować, posłuŜyliśmy się soczewką dwuwypukłą. Soczewkę ustawiliśmy
- 74 -
tak, aby element świecący diody był w ognisku. W tym celu: wiązkę światła przechodzącą przez soczewkę odbijaliśmy od lustra, ustawionego w odległości ok. 3 m, od soczewki a następnie obserwowaliśmy na przeciwległej ścianie. Przesuwając soczewką wzdłuŜ wiązki obserwowaliśmy obraz złącza p-n na ścianie. Dioda znajdowała się w ognisku, gdy obraz złącza był wyraźny, a to równocześnie oznaczało, Ŝe wiązka jest równoległa. Mimo wszystko wyniki badań kąta skręcenia przy wykorzystaniu diod jako źródła światła były obarczone błędem 25-50%. Tak duŜa niepewność pomiarowa była wynikiem niedostatecznej kolimacji wiązki oraz niskiej mocy źródła. Niestety nie udało się nam znacząco zmniejszyć niepewności, pomimo wielu prób polepszenia kolimacji wiązki i ostatecznie wykluczyliśmy diody LED jako źródła światła w naszym eksperymencie. Podczas badań nad kątem Faradaya dla flintu wykorzystywaliśmy: laser GaN ( 413=λ nm), laser Nd:YAG ( 532=λ nm) i diodę laserową ( 650=λ nm). Wartością mierzoną w trakcie badań była moc wiązki przechodzącej przez próbkę. Dla kaŜdej długości fali wykonywaliśmy serię piętnastu pomiarów IMAX , IMIN, IB (dla pięciu róŜnych odległości pomiędzy nabiegunnikami: 24 mm, 32 mm, 38 mm, 48 mm, 52 mm). Kąt skręcenia płaszczyzny polaryzacji światła w próbce obliczaliśmy ze wzoru
(1.17) wyprowadzonego w rozdziale 1: MAX
MINB
I
II −=θ , z czego dla dziesięciu wartości
najbardziej zbliŜonych do wartości średniej, obliczaliśmy średnią arytmetyczną, więc
ostatecznie: ∑ == 10
110
1i iθθ . Niepewność pomiaru kata θ obliczyliśmy metodą
róŜniczki zupełnej. Zbadaną zmianę ( )Bθ dla ustalonej długości fali przedstawiają
rys. (69-71). Za wartość B przyjęliśmy B (obliczone według: ∑ == n
i iBn
B1
1)
występujące wzdłuŜ próbki przy danej średnicy wiązki światła (20x3 mm dla flintu) – rys. (64-68). Wyniki badań zebraliśmy w tab.11, na podstawie których, wykonaliśmy rys. (69-71) przedstawiające zaleŜność ( )Bθ dla trzech długości fali. Z tab.11 moŜna odczytać, Ŝe dla badanej próbki flintu kąt skręcenia θ w przypadku 413=λ nm jest około trójkrotnie większy niŜ dla 532=λ nm i około czterokrotnie większy niŜ dla
650=λ nm, co jest powodowane zaleŜnością dyspersyjną ( )λn współczynnika załamania od długości fali. Zbadaliśmy równieŜ kąt skręcenia θ dla próbki TSAG/TSP przy czym wykorzystaliśmy tylko jedno źródło światła czyli laser Nd:YAG ( 532=λ nm), poniewaŜ próbka silnie rozpraszała/absorbowała światło o długości fali: 413 i 650 nm. Ze względu na niewielkie rozmiary próbki, za B przyjęliśmy pomiar indukcji magnetycznej w punkcie, w którym znajdowała się próbka dla pięciu odległości pomiędzy nabiegunnikami: 10 mm, 18 mm, 24 mm, 32 mm, 38 mm. Kąt skręcenia płaszczyzny polaryzacji światła obliczaliśmy w identyczny sposób jak dla próbki flintu. Podsumowanie wyników badań nad kątem Faradaya dla TSAG/TSP znajduje się w tab.13, na podstawie której powstał rys. 73 opisujący zaleŜność ( )Bθ .
Zgodnie z przewidywaniami, wraz ze wzrostem B wartość kąta skręcenia θ wzrastała w sposób liniowy dla obydwu próbek. PoniewaŜ próbka flintu i TSAG/TSP posiadały róŜne wymiary, a co za tym idzie B na ich obszarze równieŜ się róŜniły, dlatego teŜ nie moŜna porównywać wartości kąta skręcenia uzyskanych dla nich. MoŜna jedynie powiedzieć, Ŝe próbka TSAG/TSP w większym stopniu skręca płaszczyznę
polaryzacji światła niŜ próbka flintu, gdyŜ pomimo mniejszej długości l oraz B
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 75-
uzyskany kąt θ był większy (dla 532=λ nm). Aby moŜna było porównać obie próbki i dokładnie scharakteryzować ich zdolność skręcania płaszczyzny polaryzacji w polu magnetycznym, naleŜy wyznaczyć stałą proporcjonalności w równaniu (1.1):
lBV ⋅⋅=θ , którą jest stała Verdeta. Stała Verdeta zaleŜy miedzy innymi od rodzaju substancji, długości fali światła padającego oraz temperatury (rozdział 1). Niepewność pomiaru kąta θ , obliczona metodą róŜniczki zupełnej, w przypadku próbki flintu waha się na poziomie 1,5% dla 413=λ nm, 3% dla 532=λ nm, 1,7% dla 650=λ nm. W przypadku próbki TSAG/TSP niepewność jest rzędu 9%. Jak widać, niepewność pomiaru kąta θ dla flintu jest relatywnie niŜsza niŜ dla próbki TSAG/TSP. Na duŜą wartość niepewności największy wpływ miała absorpcja oraz silne rozproszenie światła przez tę próbkę. PoniewaŜ bez ścianek z nabiegunnikami (IMIN, IMAX ) do miernika docierało więcej światła, niŜ podczas pomiarów dla IB, podczas których ścianki z nabiegunnikami obcinały część rozproszonego światła, więc IMIN było większe niŜ w przypadku flintu. Dodatkową niepewność wprowadzało to, Ŝe przez analizator przechodziła wiązka o szerokości profilu równej szerokości próbki (2,5 mm), co nie było korzystne ze względu na niemoŜność pełnego wygaszenia wiązki, przy skręcaniu osi polaryzatorów. Choć ustawienie przesłony przed detektorem zmniejszyłoby ten niepoŜądany efekt, ze względu na słabą transmisję światła przez próbkę, nie mogliśmy go tam ustawić. Analizując wpływ innych czynników (poza rozpraszaniem), na dokładność pomiaru kąta skręcenia płaszczyzny polaryzacji w obydwu próbkach, moŜemy stwierdzić, Ŝe największe znaczenie miały następujące czynniki:
o Dokładne ustawienie toru wiązki tak, aby centralnie przechodziła przez otwory w nabiegunnikach i nie „ślizgała się” w ich wnętrzu. Co waŜne, przy kolejnym nakładaniu przesuwnej ścianki z nabiegunnikiem naleŜało zawsze ustawiać ją w tym samym połoŜeniu, aby uniknąć ewentualnych strat natęŜenia wiązki oraz utrzymać stałą wartość pola magnetycznego w obszarze próbki.
o Pełne dokręcanie śrub do ścianki z nabiegunnikiem zaraz po jej nałoŜeniu tak, aby dla kaŜdego pomiaru IB utrzymywać stałe pole, dla danej odległości pomiędzy nabiegunnikami.
o Zachowanie tej samej wagi na stole optycznym równieŜ miało duŜe znaczenie. PoniewaŜ ścianki układu z nabiegunnikami są dosyć cięŜkie, ich nakładanie moŜe nadmiernie obciąŜać stół optyczny i powodować odkształcenie układu po ich zdjęciu i, co za tym idzie, powodować zmiany toru wiązki światła i znacznie zaburzać powtarzalność wyników. W tym przypadku konieczny był kompromis pomiędzy powtarzalnością a dokładnością wyników. Tak więc zdjęte ścianki odkładaliśmy na stół optyczny pomimo tego, Ŝe wprowadzały niezerowe pole magnetyczne (0,001-0,004) T dla pomiarów IMIN i IMAX .
Z tych samych względów nie naleŜy opierać się bądź naciskać czymkolwiek na stół optyczny podczas pomiarów oraz wyeliminować drgania elementów stanowiska pomiarowego. o Tło, które staraliśmy się zminimalizować. o Niedokładność skręcenia osi optycznych polaryzatorów. o Elementy układu powodujące straty natęŜenia światła przy odbiciu, które
staraliśmy się ograniczyć do minimum tak, aby natęŜenie światła docierającego do detektora było jak największe.
o Ustawienie próbki na stoliku, tak aby wiązka padała na nią prostopadle. Dodatkowo:
o Stałe połoŜenie przesłony obcinającej podłuŜny profil wiązki lasera GaN.

- 76 -
Całkowite usunięcie błędów systematycznych jest niemoŜliwe. MoŜna je redukować drogą doskonalenia metody pomiaru, stosowanie bardziej doskonałych i precyzyjnych przyrządów pomiarowych a takŜe poprzez wprowadzanie poprawek do formuł obliczeniowych. RównieŜ nie jest moŜliwe całkowite uchronienie się od błędów przypadkowych ale moŜna je zredukować drogą wielokrotnego powtarzania pomiaru. Zachodzi przy tym częściowa kompensacja przypadkowych zaniŜających i zawyŜających odchyleń wyników pomiarów. Aby uniknąć błędów grubych przed przystąpieniem do pomiarów, naleŜy:
sprawdzić stabilność mocy źródła światła, sprawdzić czy wiązka światła nie nasyca detektora (fotodioda, miernik mocy), poprawnie wykalibrować miernik mocy, wpisać odpowiedni kod sondy Halla.
Obliczenia stałej Verdeta dla próbek. Z rys. (69-71 oraz 73) wyznaczyliśmy stałą Verdeta dla próbek flintu i TSAG/TSP przy trzech róŜnych długościach fali. Do tego celu wykorzystaliśmy dane
uzyskane z przeprowadzonej regresji liniowej:LB
AV
−= θ. Stała A występująca
w równaniu ma znaczenie fizyczne. Mianowicie jest to niewielki kąt skręcenia płaszczyzny polaryzacji występujący dla pewnej resztkowej wartości pola zewnętrznego
B, które my przyjmujemy za zerowe. Wielkość tego pola wyznaczona z wzoru VL
AB =
wacha się pomiędzy 0,001 a 0,004 T. UwaŜamy, Ŝe moŜe to być pole wytwarzane przez nabiegunniki, które podczas pomiarów IMAX odkładane były na stół optyczny. Obliczone stałe Verdeta dla flintu znajdują się w tab. 12, natomiast dla TSAG/TSP w tab. 14. Na podstawie danych z tab. 12 powstał rys. 72, czyli zaleŜność
( )λV . Niepewność stałej Verdeta obliczyliśmy metodą róŜniczki zupełnej. Porównując średnie wartości stałej Verdeta dla próbek moŜemy sprawdzić, która z nich bardziej oddziałuje z polem magnetycznym. Dla długości fali 532=λ nm stała Verdeta
dla flintu wynosi: ( ) 51006,068,1 −×±=V
⋅ cmGs
rad, natomiast dla TSAG/TSP:
( ) 31004,126,7 −×±=V
⋅ cmGs
rad. A więc jako materiał do zastosowań w czujnikach
słabych pól magnetycznych wybralibyśmy próbkę TSAG/TSP, ze względu na moŜliwość uzyskania wyŜszej czułości detekcji sygnału przy małych wymiarach. Dla próbki szklanej średnie wartości stałych Verdeta w zaleŜności od długości światła padającego przedstawia tab. 16.
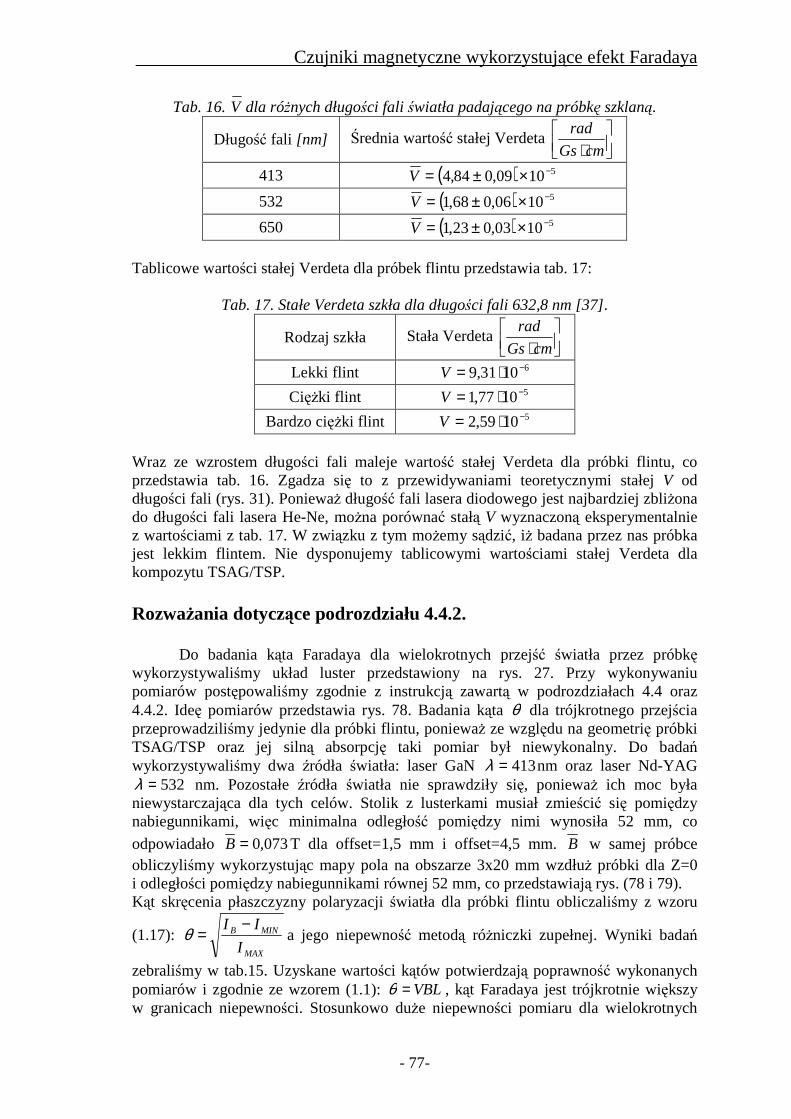
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 77-
Tab. 16. V dla róŜnych długości fali światła padającego na próbkę szklaną.
Długość fali [nm] Średnia wartość stałej Verdeta
⋅ cmGs
rad
413 ( ) 51009,084,4 −×±=V
532 ( ) 51006,068,1 −×±=V
650 ( ) 51003,023,1 −×±=V Tablicowe wartości stałej Verdeta dla próbek flintu przedstawia tab. 17:
Tab. 17. Stałe Verdeta szkła dla długości fali 632,8 nm [37].
Rodzaj szkła Stała Verdeta
⋅ cmGs
rad
Lekki flint 61031,9 −⋅=V
CięŜki flint 51077,1 −⋅=V
Bardzo cięŜki flint 51059,2 −⋅=V
Wraz ze wzrostem długości fali maleje wartość stałej Verdeta dla próbki flintu, co przedstawia tab. 16. Zgadza się to z przewidywaniami teoretycznymi stałej V od długości fali (rys. 31). PoniewaŜ długość fali lasera diodowego jest najbardziej zbliŜona do długości fali lasera He-Ne, moŜna porównać stałą V wyznaczoną eksperymentalnie z wartościami z tab. 17. W związku z tym moŜemy sądzić, iŜ badana przez nas próbka jest lekkim flintem. Nie dysponujemy tablicowymi wartościami stałej Verdeta dla kompozytu TSAG/TSP. RozwaŜania dotyczące podrozdziału 4.4.2. Do badania kąta Faradaya dla wielokrotnych przejść światła przez próbkę wykorzystywaliśmy układ luster przedstawiony na rys. 27. Przy wykonywaniu pomiarów postępowaliśmy zgodnie z instrukcją zawartą w podrozdziałach 4.4 oraz 4.4.2. Ideę pomiarów przedstawia rys. 78. Badania kąta θ dla trójkrotnego przejścia przeprowadziliśmy jedynie dla próbki flintu, poniewaŜ ze względu na geometrię próbki TSAG/TSP oraz jej silną absorpcję taki pomiar był niewykonalny. Do badań wykorzystywaliśmy dwa źródła światła: laser GaN 413=λ nm oraz laser Nd-YAG
532=λ nm. Pozostałe źródła światła nie sprawdziły się, poniewaŜ ich moc była niewystarczająca dla tych celów. Stolik z lusterkami musiał zmieścić się pomiędzy nabiegunnikami, więc minimalna odległość pomiędzy nimi wynosiła 52 mm, co
odpowiadało 073,0=B T dla offset=1,5 mm i offset=4,5 mm. B w samej próbce obliczyliśmy wykorzystując mapy pola na obszarze 3x20 mm wzdłuŜ próbki dla Z=0 i odległości pomiędzy nabiegunnikami równej 52 mm, co przedstawiają rys. (78 i 79). Kąt skręcenia płaszczyzny polaryzacji światła dla próbki flintu obliczaliśmy z wzoru
(1.17): MAX
MINB
I
II −=θ a jego niepewność metodą róŜniczki zupełnej. Wyniki badań
zebraliśmy w tab.15. Uzyskane wartości kątów potwierdzają poprawność wykonanych pomiarów i zgodnie ze wzorem (1.1): VBL=θ , kąt Faradaya jest trójkrotnie większy w granicach niepewności. Stosunkowo duŜe niepewności pomiaru dla wielokrotnych

- 78 -
przejść, poza tymi wymienionymi dla przejść pojedynczych, są powodowane absorpcją próbki, z czym związana była niŜsza wartość IMAX oraz niewielka róŜnicą zmierzonych IB i IMIN. Zgodnie z rys. 38, który przedstawia zmianę indukcji magnetycznej w zaleŜności od ustawionej odległości pomiędzy nabiegunnikami, wartość B nie powinna zmieniać się dla niewielkich wartości offsetów. Średnia indukcja magnetyczna w obszarze próbki rzeczywiście pozostaje stała, jeśli uwzględnimy niepewność pomiarową i stosujemy małe wartości kąta α .
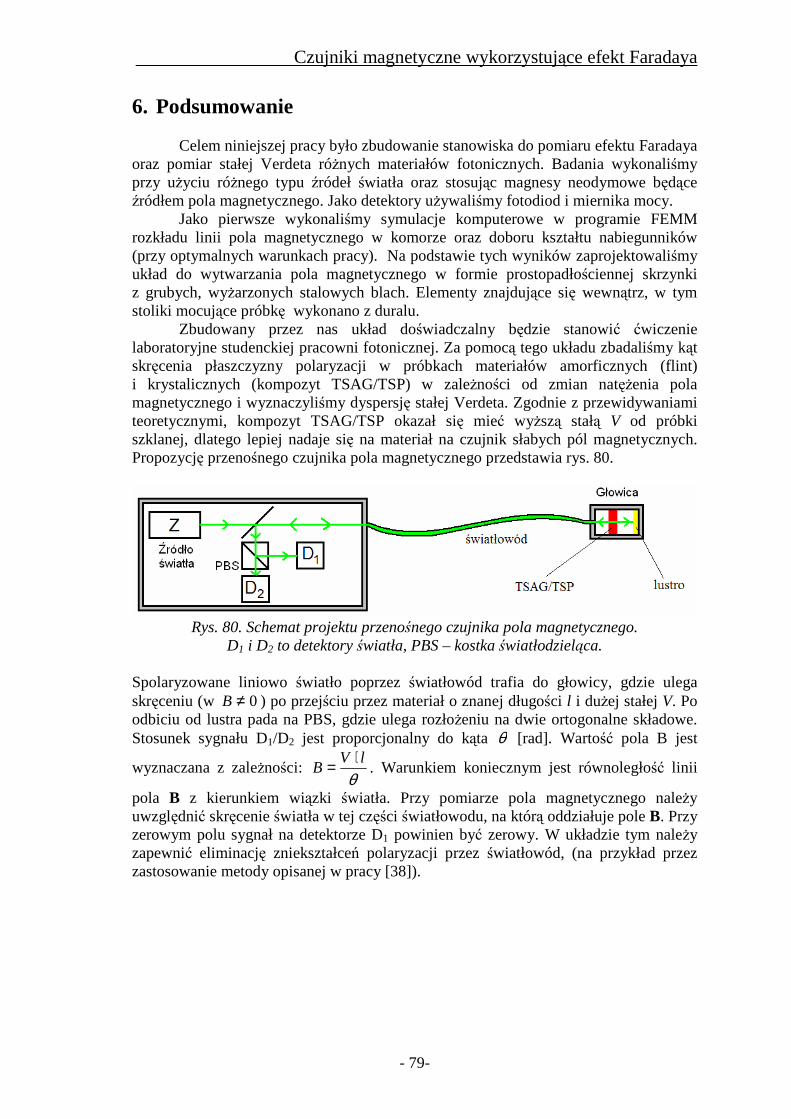
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 79-
6. Podsumowanie
Celem niniejszej pracy było zbudowanie stanowiska do pomiaru efektu Faradaya oraz pomiar stałej Verdeta róŜnych materiałów fotonicznych. Badania wykonaliśmy przy uŜyciu róŜnego typu źródeł światła oraz stosując magnesy neodymowe będące źródłem pola magnetycznego. Jako detektory uŜywaliśmy fotodiod i miernika mocy. Jako pierwsze wykonaliśmy symulacje komputerowe w programie FEMM rozkładu linii pola magnetycznego w komorze oraz doboru kształtu nabiegunników (przy optymalnych warunkach pracy). Na podstawie tych wyników zaprojektowaliśmy układ do wytwarzania pola magnetycznego w formie prostopadłościennej skrzynki z grubych, wyŜarzonych stalowych blach. Elementy znajdujące się wewnątrz, w tym stoliki mocujące próbkę wykonano z duralu. Zbudowany przez nas układ doświadczalny będzie stanowić ćwiczenie laboratoryjne studenckiej pracowni fotonicznej. Za pomocą tego układu zbadaliśmy kąt skręcenia płaszczyzny polaryzacji w próbkach materiałów amorficznych (flint) i krystalicznych (kompozyt TSAG/TSP) w zaleŜności od zmian natęŜenia pola magnetycznego i wyznaczyliśmy dyspersję stałej Verdeta. Zgodnie z przewidywaniami teoretycznymi, kompozyt TSAG/TSP okazał się mieć wyŜszą stałą V od próbki szklanej, dlatego lepiej nadaje się na materiał na czujnik słabych pól magnetycznych. Propozycję przenośnego czujnika pola magnetycznego przedstawia rys. 80.
Rys. 80. Schemat projektu przenośnego czujnika pola magnetycznego.
D1 i D2 to detektory światła, PBS – kostka światłodzieląca. Spolaryzowane liniowo światło poprzez światłowód trafia do głowicy, gdzie ulega skręceniu (w 0≠B ) po przejściu przez materiał o znanej długości l i duŜej stałej V. Po odbiciu od lustra pada na PBS, gdzie ulega rozłoŜeniu na dwie ortogonalne składowe. Stosunek sygnału D1/D2 jest proporcjonalny do kąta θ [rad]. Wartość pola B jest
wyznaczana z zaleŜności: θ
lVB
⋅= . Warunkiem koniecznym jest równoległość linii
pola B z kierunkiem wiązki światła. Przy pomiarze pola magnetycznego naleŜy uwzględnić skręcenie światła w tej części światłowodu, na którą oddziałuje pole B. Przy zerowym polu sygnał na detektorze D1 powinien być zerowy. W układzie tym naleŜy zapewnić eliminację zniekształceń polaryzacji przez światłowód, (na przykład przez zastosowanie metody opisanej w pracy [38]).

- 80 -
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 81-
Bibliografia [1] P. Nakielna, J. Czerwiec, Efekt Faradaya w TSAG/TSP 2/1 +5% at. Pr, Praca roczna, Z. Fotoniki IF UJ, Kraków 2006. [2] P. Lefek, Stabilizacja lasera He-Ne, Praca magisterska, Z. Fotoniki IF UJ, Kraków 2005. [3] Y. Kagamitani, D. A. Pawlak, H. Sato, A. Yoshikawa, Jpn. J. Appl. Phys., 41, 6020 (2002). [4] Y. Kagamitani, D. A. Pawlak, H. Sato, A. Yoshikawa, J. Martinek, H. Machina, T. Fukusa, J. Mater. Res., 19, 579 (2004). [5] M. Faraday, Philos. Mag., 294, 28 (1846). [6] Z. P. Wang, X. Z. Wang, C. M. Ouyang, Z. J. Huang, Optics & Laser Technology, 39, 738 (2007). [7] Strona internetowa, http://pl.wikipedia.org/wiki, hasło: magnetoencefalografia. [8] Strona internetowa, http://pl.wikipedia.org/wiki, hasło: SQUID. [9] Strona internetowa, http://physics.princeton.edu/atomic/romalis/magnetometer. [10] Strona internetowa, http://en.wikipedia.org/wiki/, hasło SERF. [11] User’s Manual: Model 410 Gaussmetter, firmy: LakeShore Meassure and Control Technologies. [12] Strona internetowa, http://en.wikipedia.org/wiki/, hasło: magnetometer. [13] Strona internetowa, http://en.wikipedia.org/wiki/, hasło: Verdet. [14] Strona internetowa, http://en.wikipedia.org/wiki/, hasło: Verdet constant. [15] W. Zhang, F. Guo, J. Chen, Journal of Crystal Growth, 306, 1 (2007). [16] Encyklopedia fizyki współczesnej, hasło: zjawisko Faradaya. [17] Encyklopedia fizyki, t. 3, PWN, Warszawa, 1974, hasło: zjawiska elektryczne i magnetyczne. [18] D. Jacob, M. Vallet, F. Bretenaker, A. le Floch,R. Le Naour, Appl. Phys. Lett. 66, 3564 (1995). [19] Sz. Pustelny, Magnetooptyczne efekty w parach atomowych, Praca magisterska, Z. Fotoniki IF UJ, Kraków 2003. [20] C.Z. Tan, J. Arndt, Physica B, 233, 1 (1997). [21] C. Z. Tan, J. Arndt, , Journal of Non-Crystalline Solids, 222, 391 (1997). [22] Y. Hwang, H. Kim, S. Cho, T. Kim,Y. Um, H. Park, G. Jeen, Journal of Physics and Chemistry of Solids, 60, 309 (1999). [23] D. Meeker, User’s Manual, Finite Element Method Magnetics Version 4.0, (2004). [24] Q. Chen and A. Konrad, IEEE Transactions on Magnetics, 33, 663 (1997). [25] Strona internetowa, http://www.magnesy.pl. [26] D. A. Pawlak, Y. Kagamitani, A. Yoshikawa, K. Wozniak, H. Sato, H. Machida, T. Fukada, J. Cryst. Growth 226, 341 (2001). [27] D.A.Pawlak, G. Lerondel, I. Dmytruk, Y. Kagamitani, S. Durbin, P. Royer, T. Fukada, J. Appl. Phys. 91, 9731 (2002). [28] Strona internetowa, http://en.wikipedia.org/wiki/, hasło: flint glass. [29] PHYWE series of publications, Faraday effect - PHYWE SYSTEME GMBH 37070, Göttingen, Germany. [30] Strona internetowa, http://pl.wikipedia.org/wiki, hasło: LED. [31] D. Halliday – R. Resnick, Fizyka, Tom 2, PWN, Warszawa 1974. [32] K. Both, S. Hill, Optoelektronka, WKŁ, Warszawa 2001. [33] B. Ziętek, Optoelektronika, Wydawnictwo UMK, Toruń 2004. [34] TOP GaN Blue Laser Technologies, folder reklamowy. [35] Strona internetowa, www.coherent.com.
- 82 -
[36] User manual, SM32 pro, Spectral products. [37] Ch. D. Hodgman, Handbook of Chemistry and Physics, 35th ed. vol.2, Chemical Rubber Publishing Co., 1953, p.2737. [38] A. Enokihara, M. Izutsu, J. of Lightwave Technology, 5, 1584 (987).

Czujniki magnetyczne wykorzystujące efekt Faradaya
- 83-
Dodatek A. Rysunki techniczne poszczególnych elementów komory do
wytwarzania pola magnetycznego i układu mocowania próbki.

- 84 -
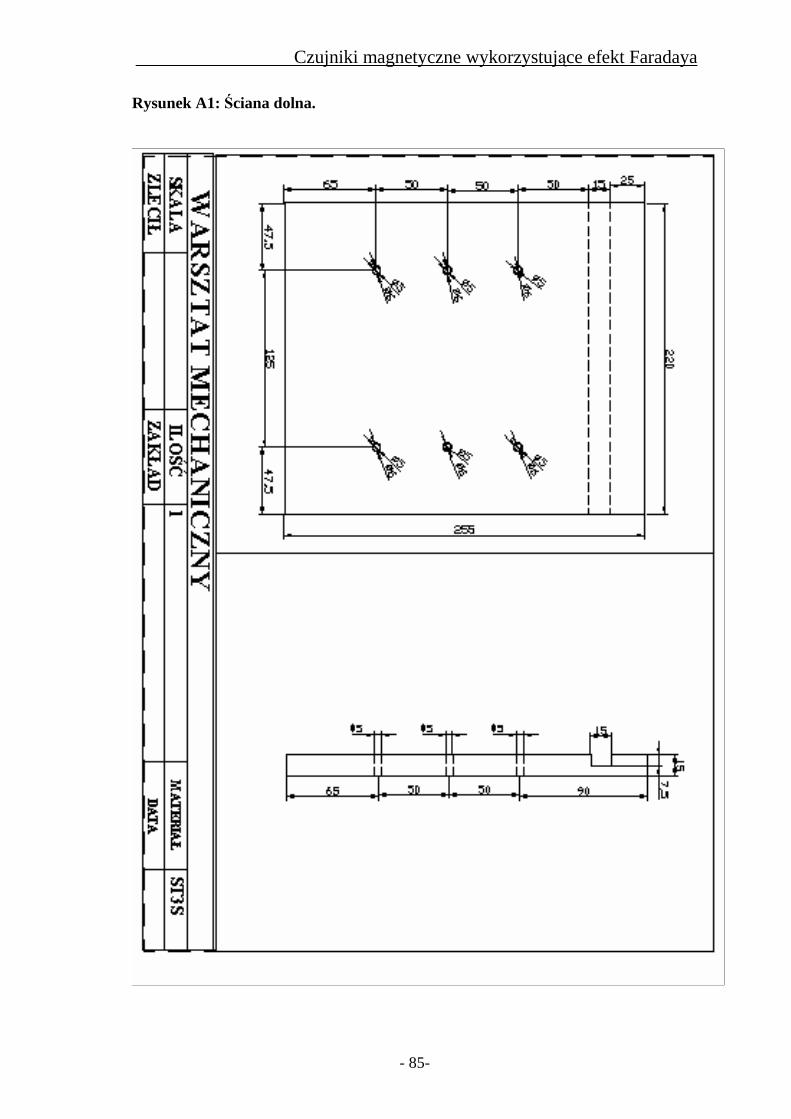
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 85-
Rysunek A1: Ściana dolna.
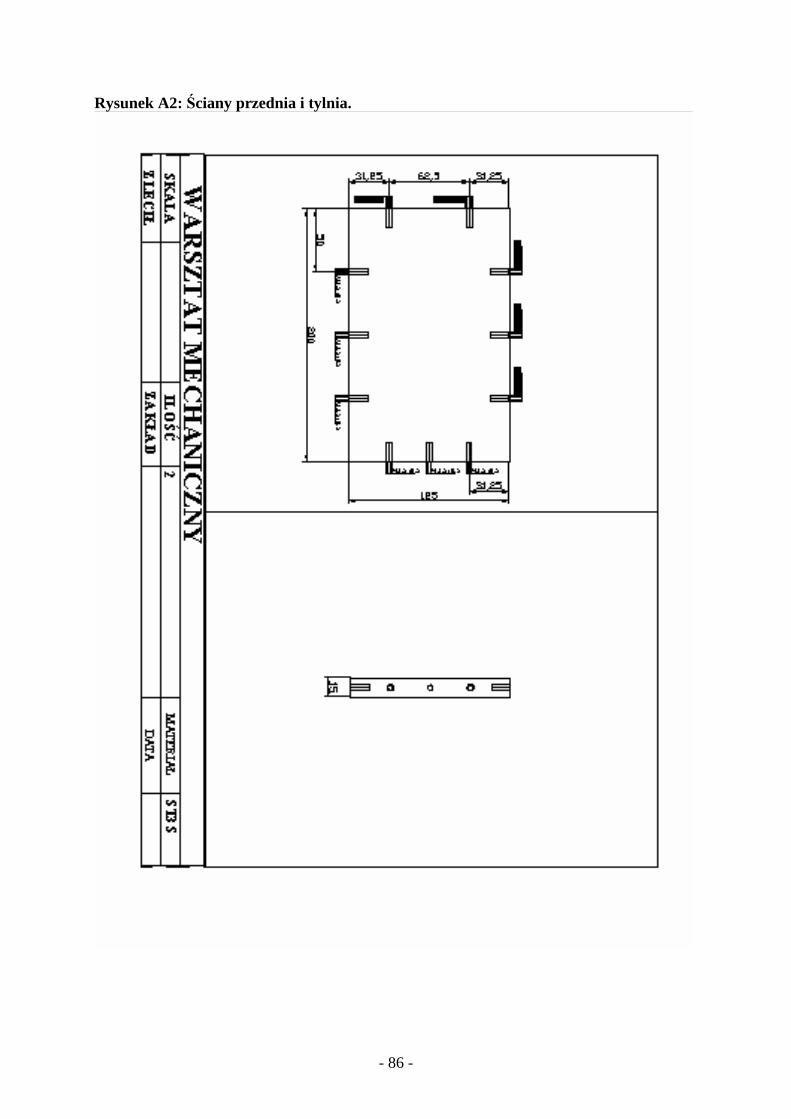
- 86 -
Rysunek A2: Ściany przednia i tylnia.
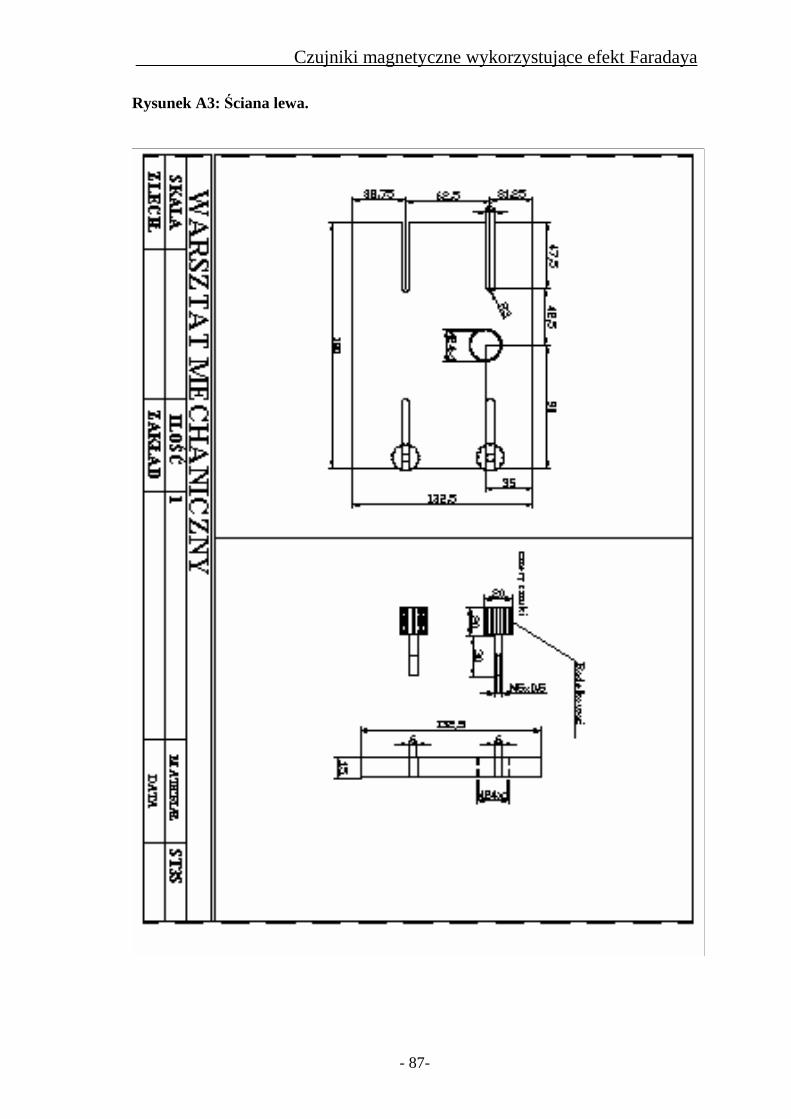
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 87-
Rysunek A3: Ściana lewa.

- 88 -
Rysunek A4: Ściana prawa.
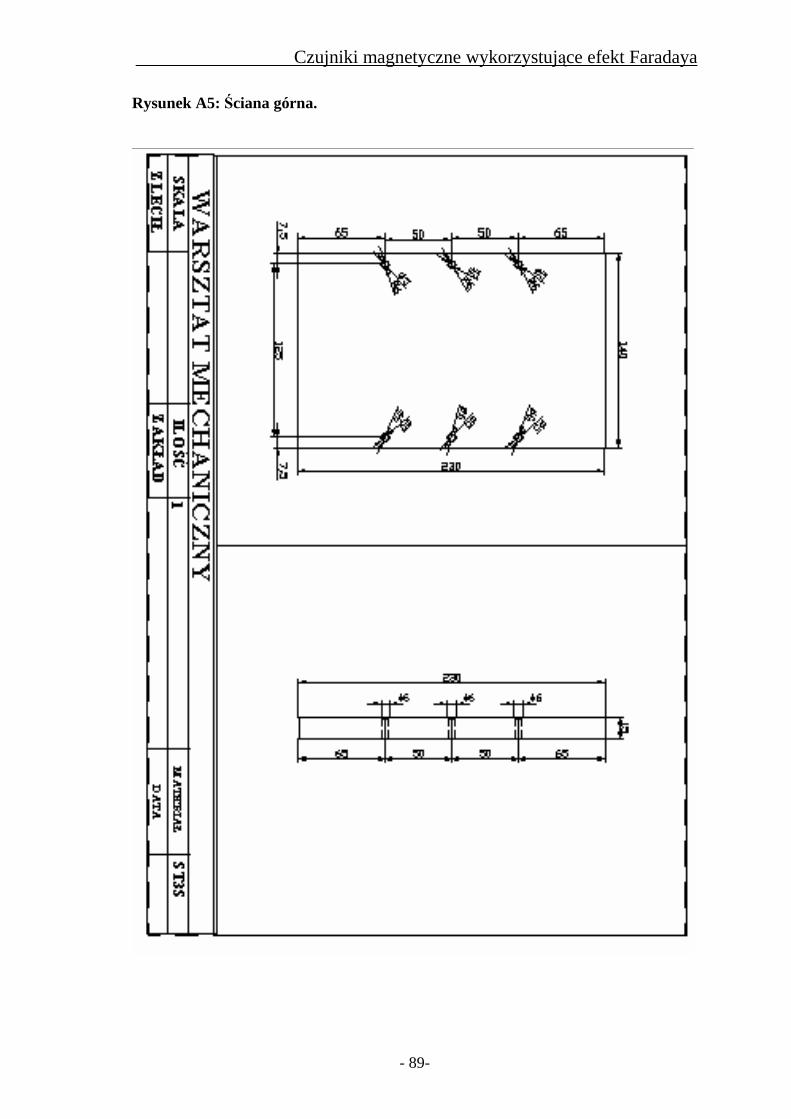
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 89-
Rysunek A5: Ściana górna.
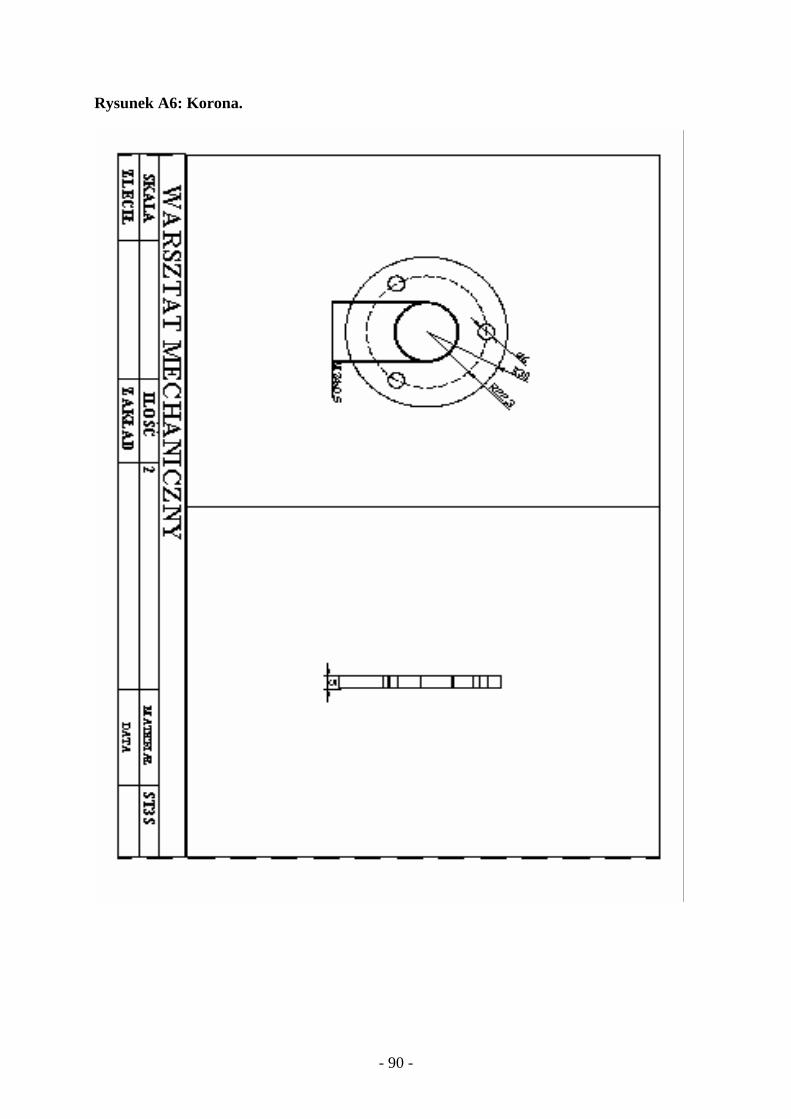
- 90 -
Rysunek A6: Korona.
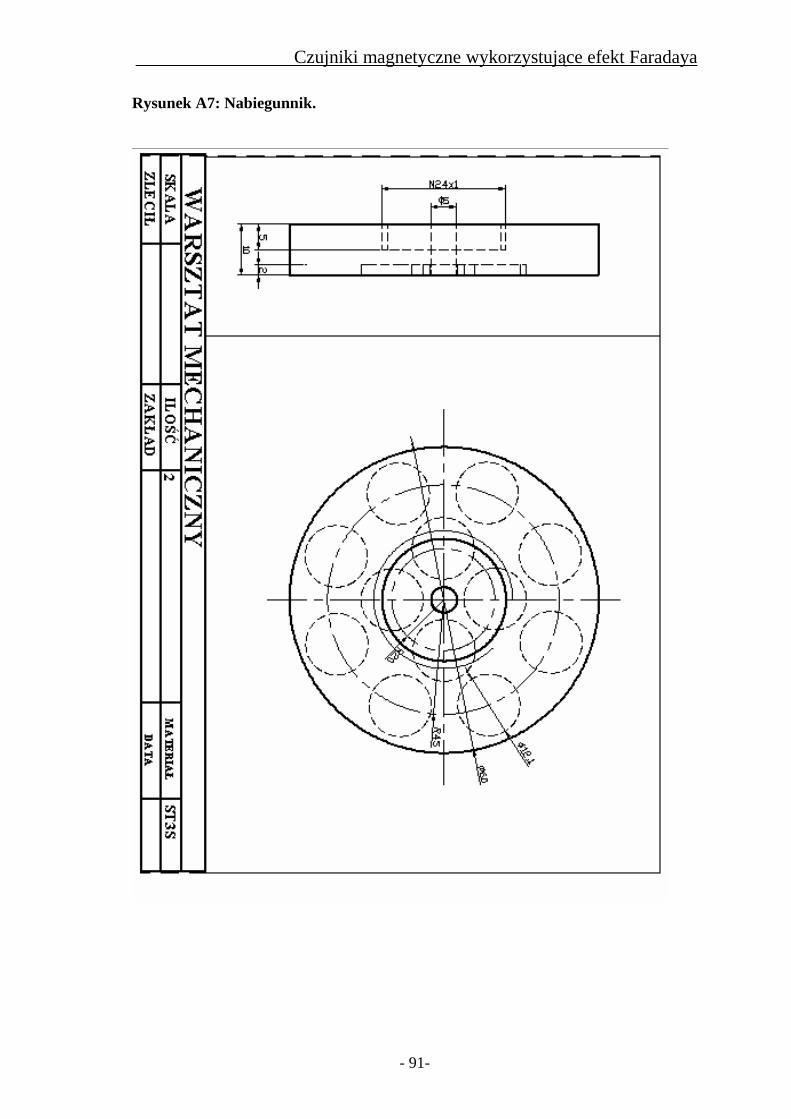
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 91-
Rysunek A7: Nabiegunnik.
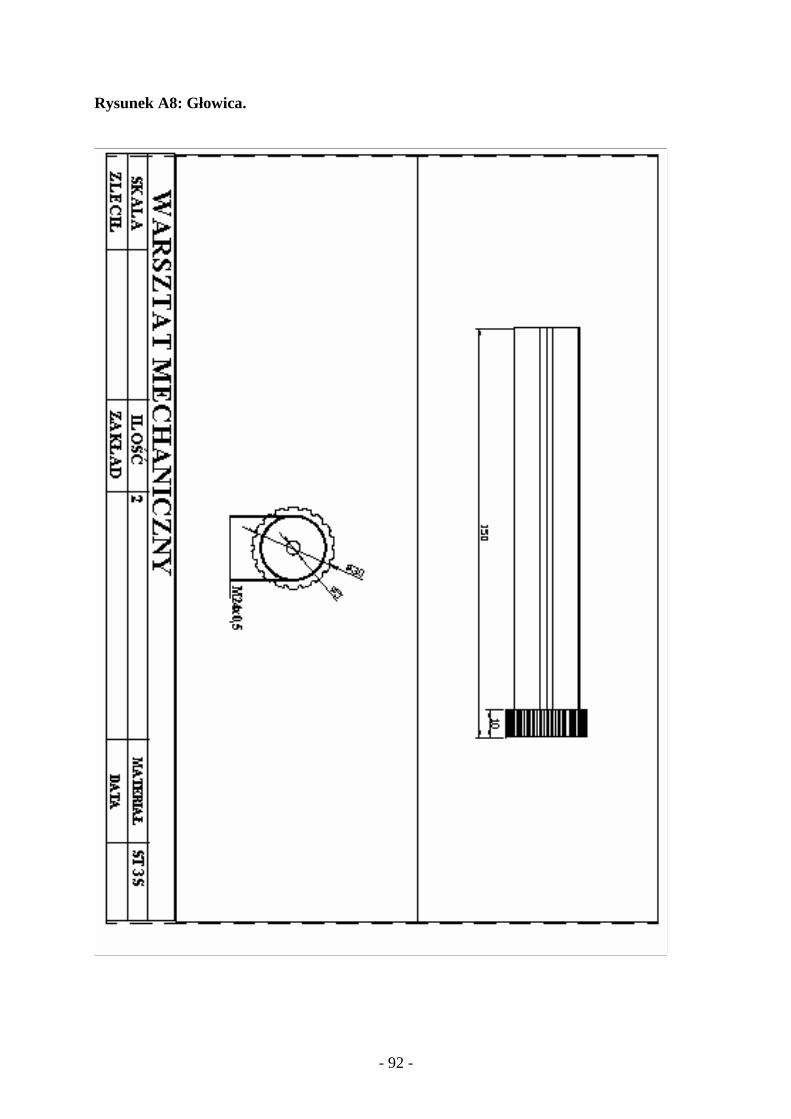
- 92 -
Rysunek A8: Głowica.
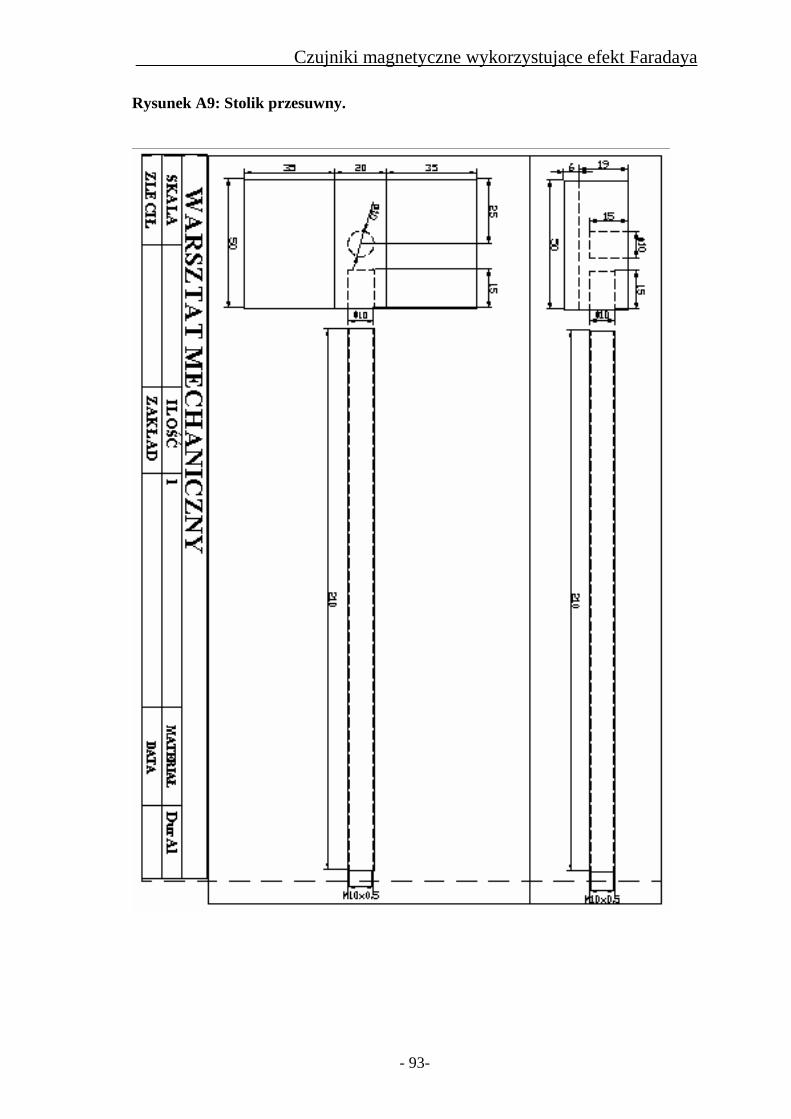
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 93-
Rysunek A9: Stolik przesuwny.
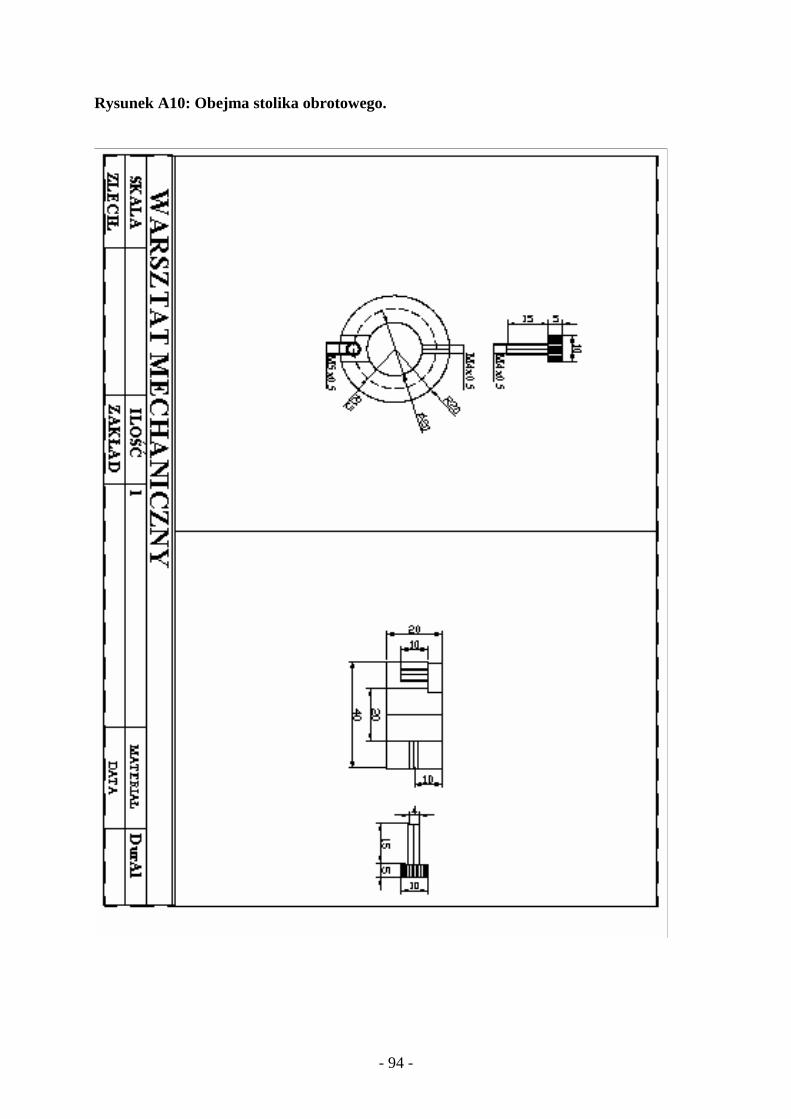
- 94 -
Rysunek A10: Obejma stolika obrotowego.
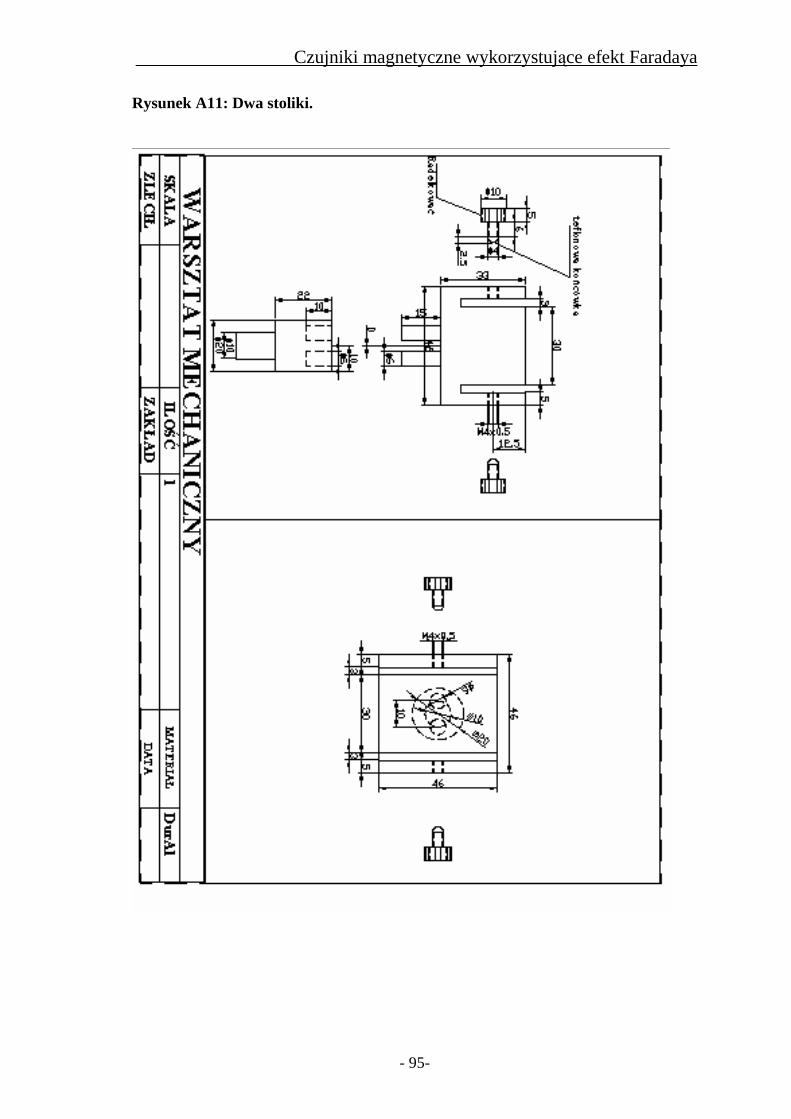
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 95-
Rysunek A11: Dwa stoliki.
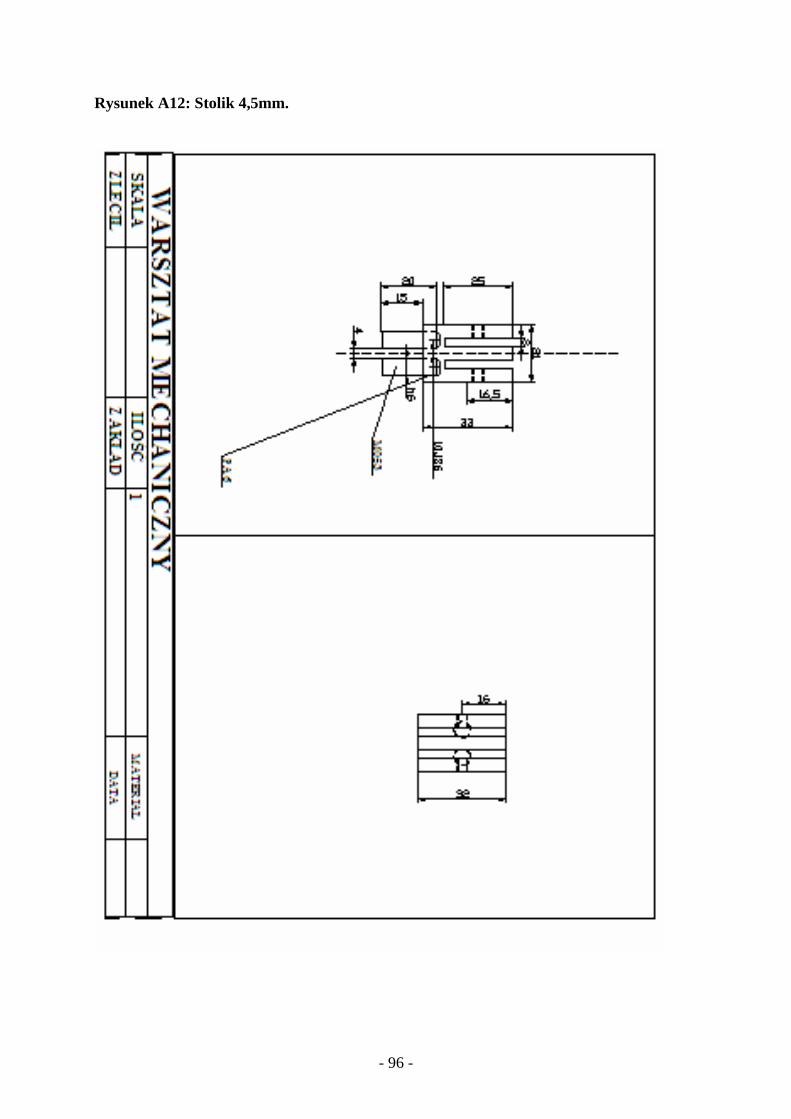
- 96 -
Rysunek A12: Stolik 4,5mm.
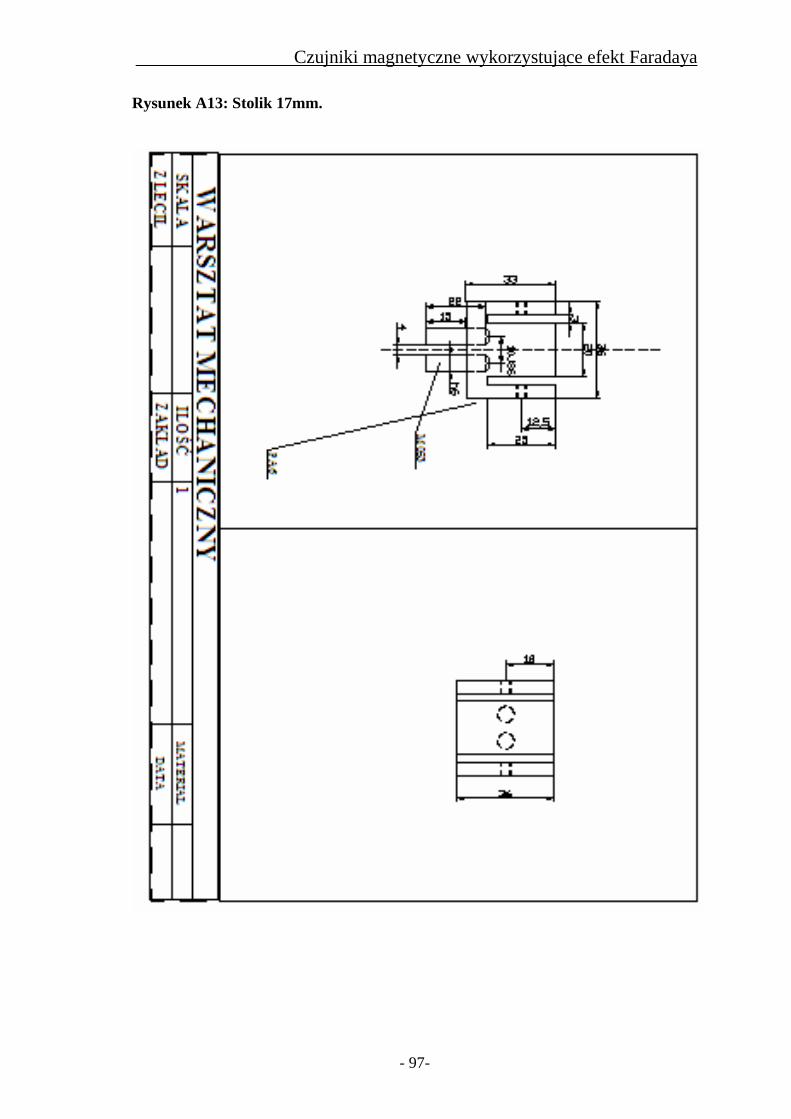
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 97-
Rysunek A13: Stolik 17mm.

- 98 -
Rysunek A14: Listewka.

Czujniki magnetyczne wykorzystujące efekt Faradaya
- 99-
Rysunek A15: Szyna 1.
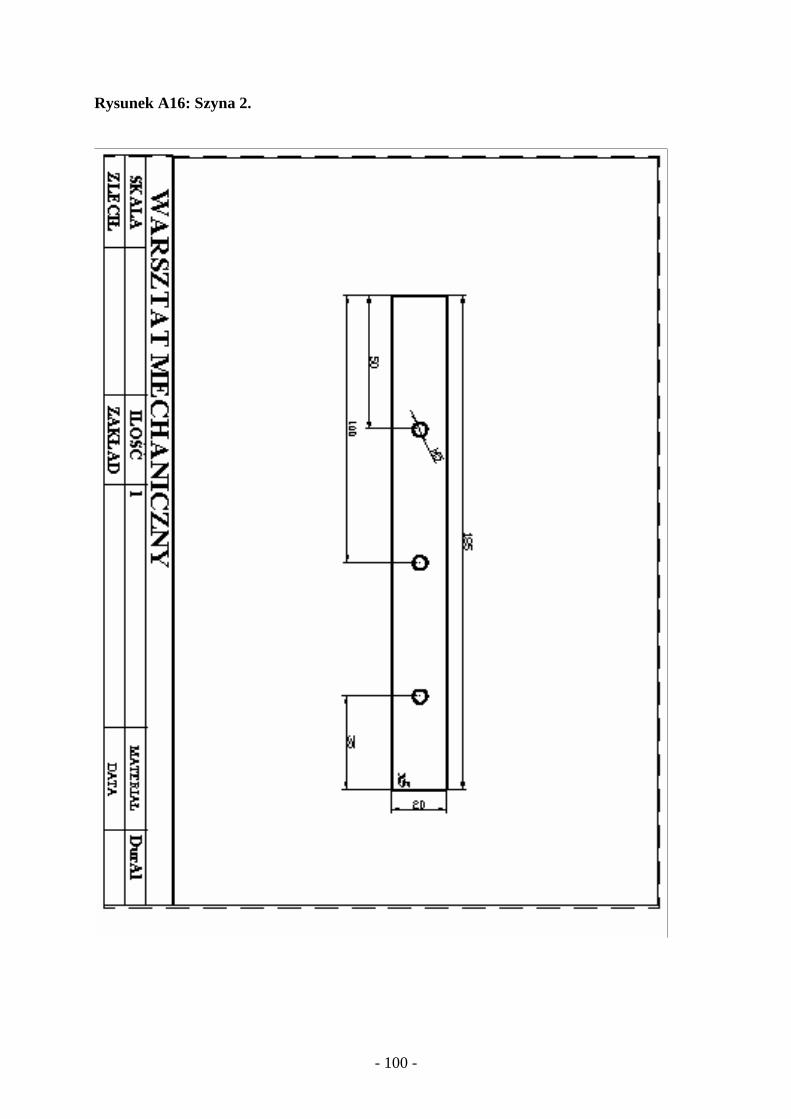
- 100 -
Rysunek A16: Szyna 2.
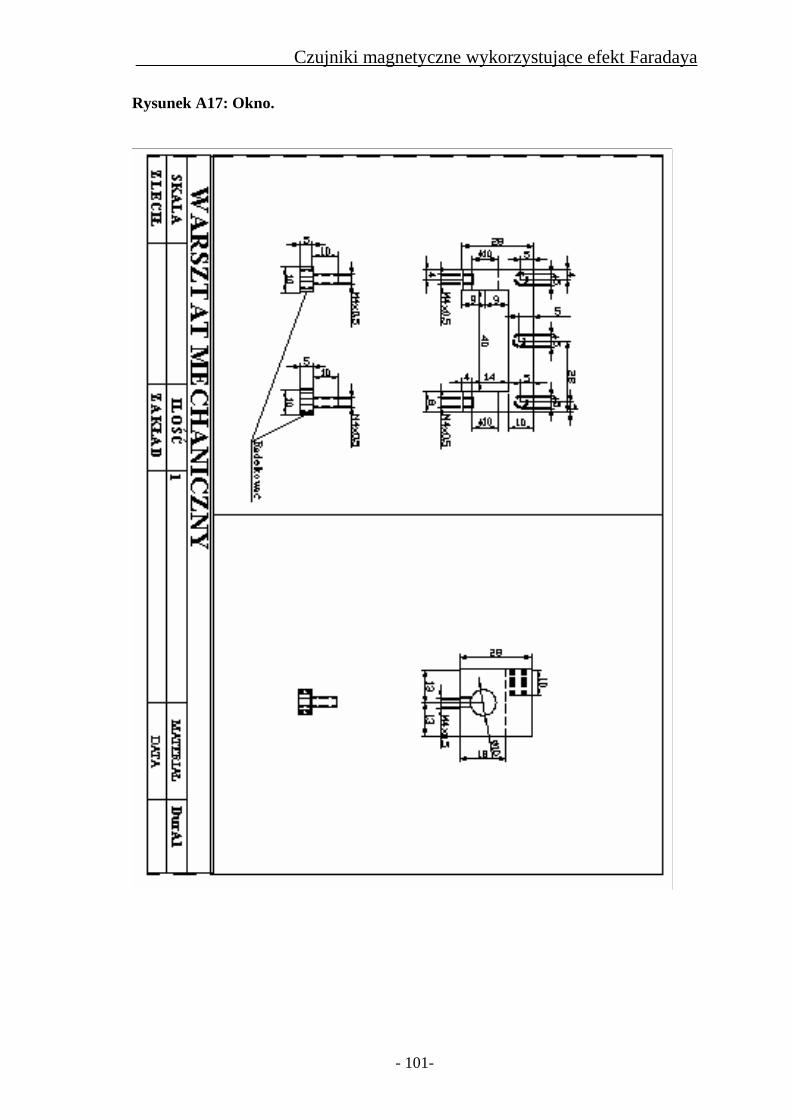
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 101-
Rysunek A17: Okno.
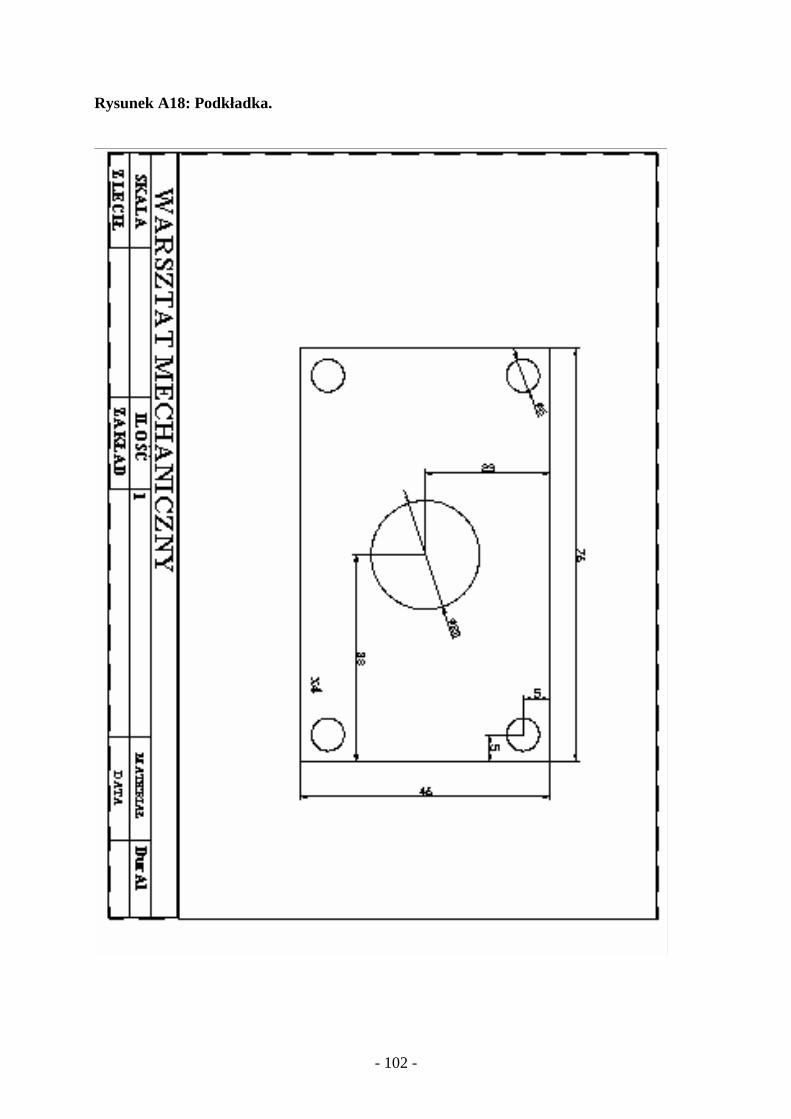
- 102 -
Rysunek A18: Podkładka.
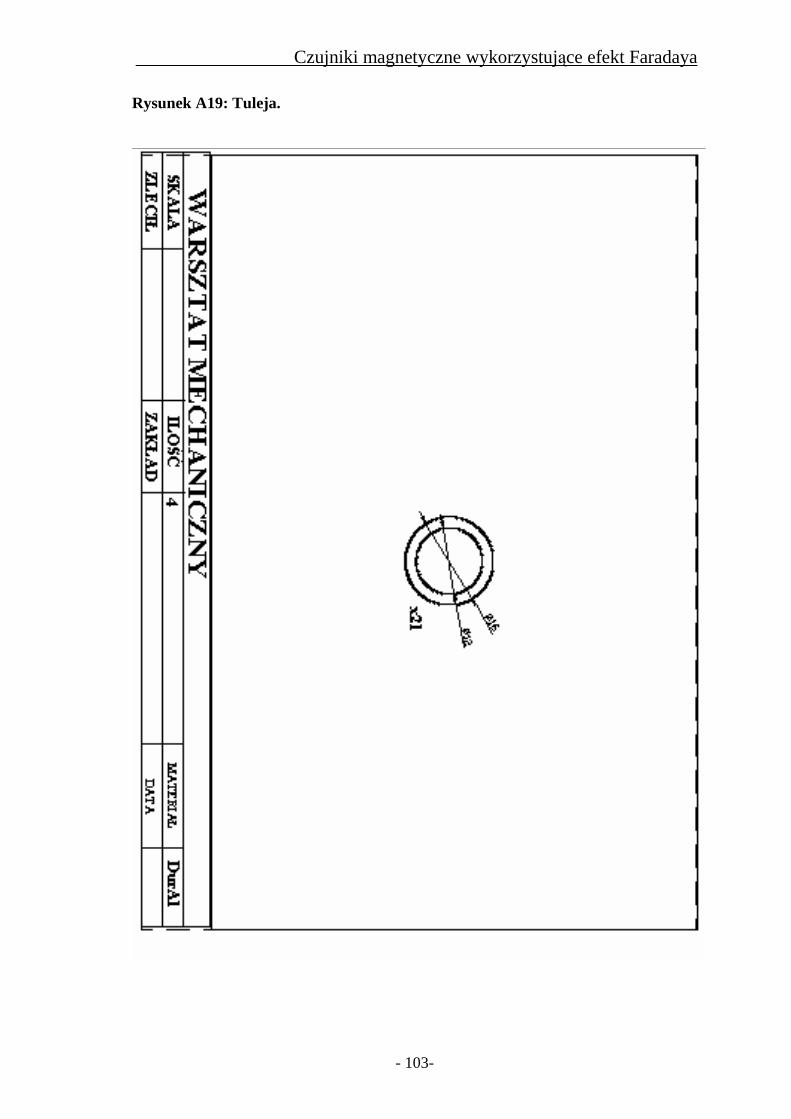
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 103-
Rysunek A19: Tuleja.
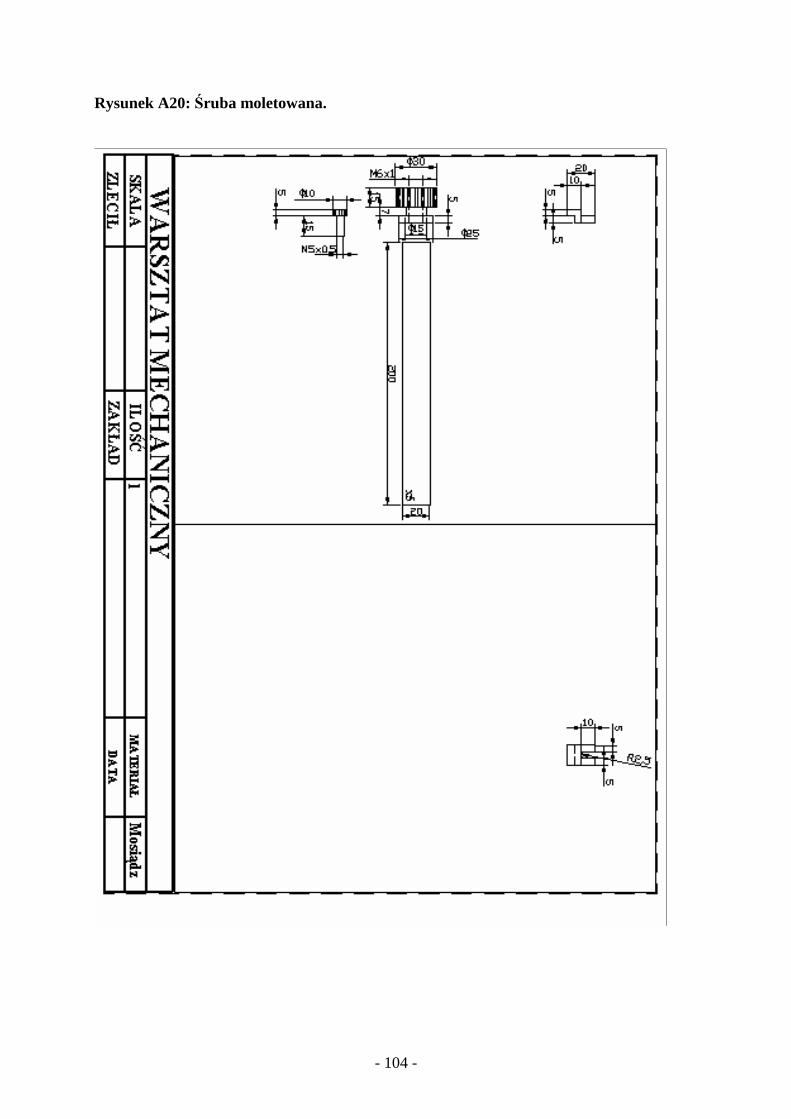
- 104 -
Rysunek A20: Śruba moletowana.
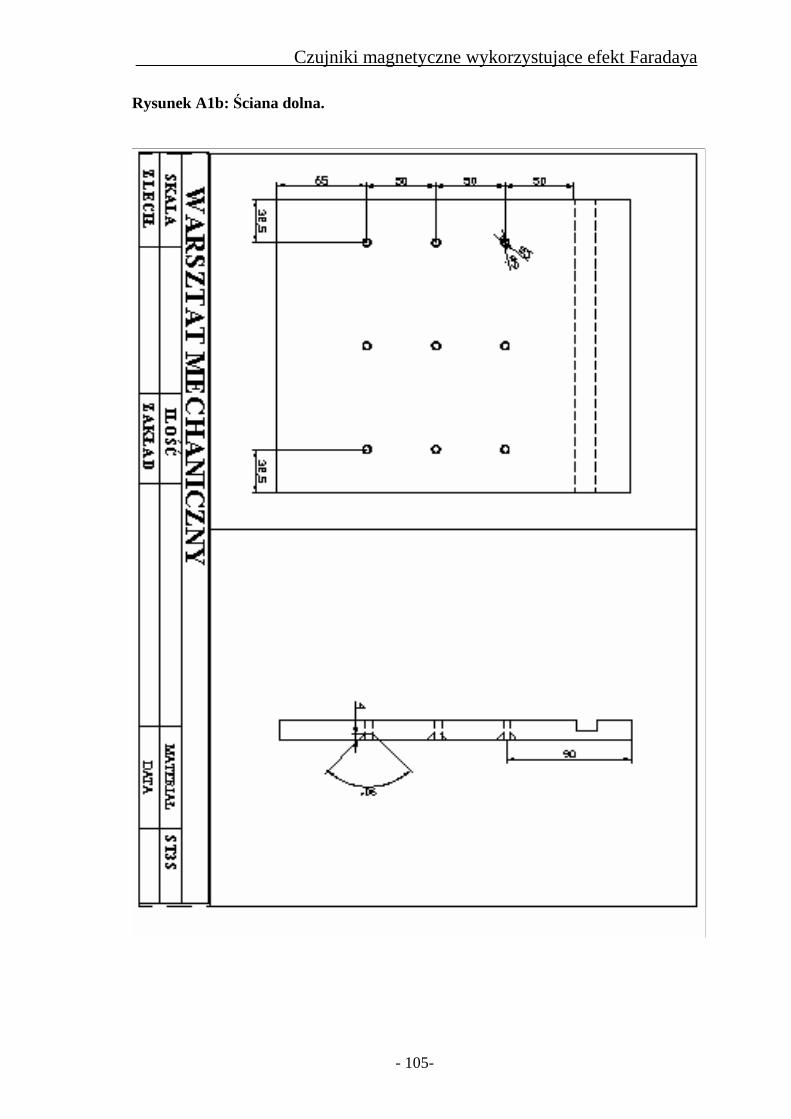
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 105-
Rysunek A1b: Ściana dolna.

- 106 -
Rysunek 2b: Kołnierz ściana przednia i tylnia.
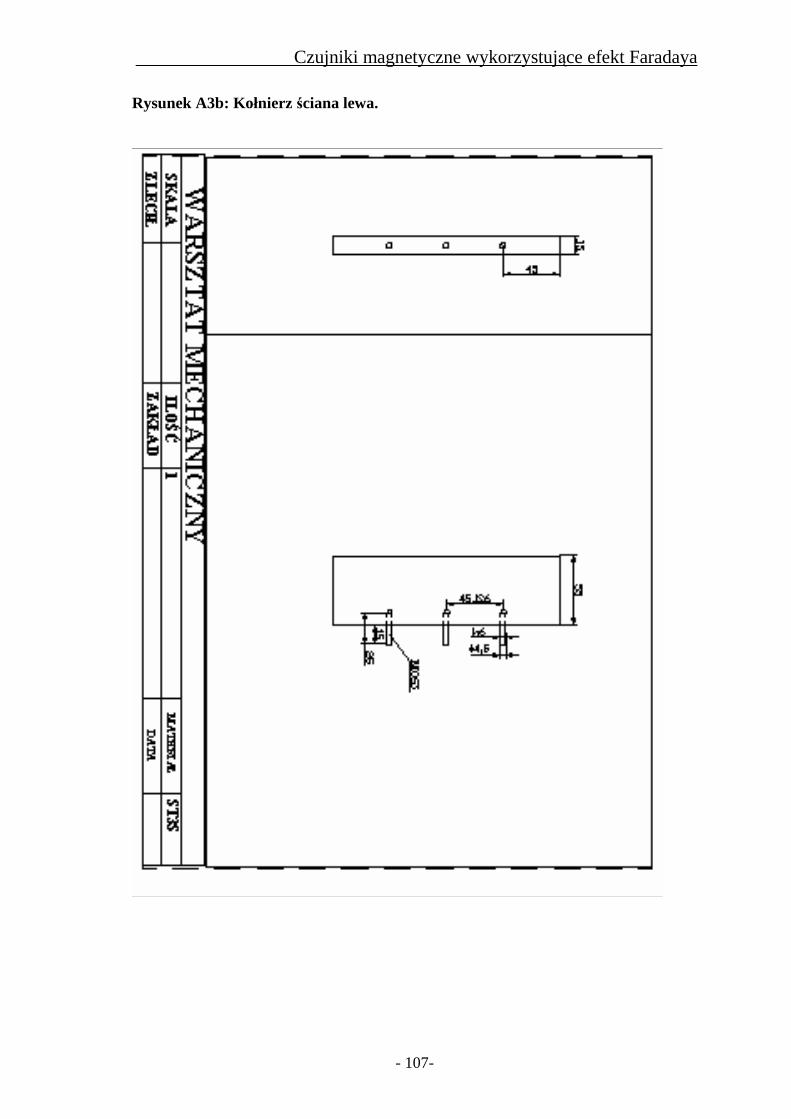
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 107-
Rysunek A3b: Kołnierz ściana lewa.
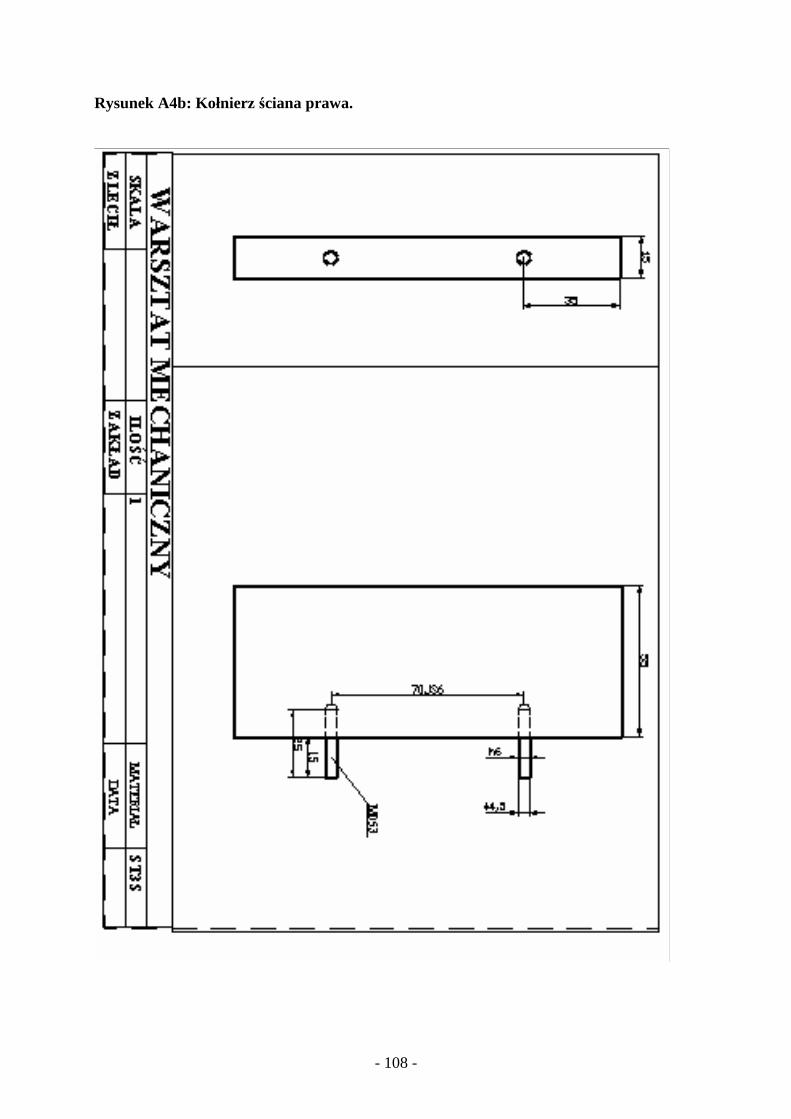
- 108 -
Rysunek A4b: Kołnierz ściana prawa.
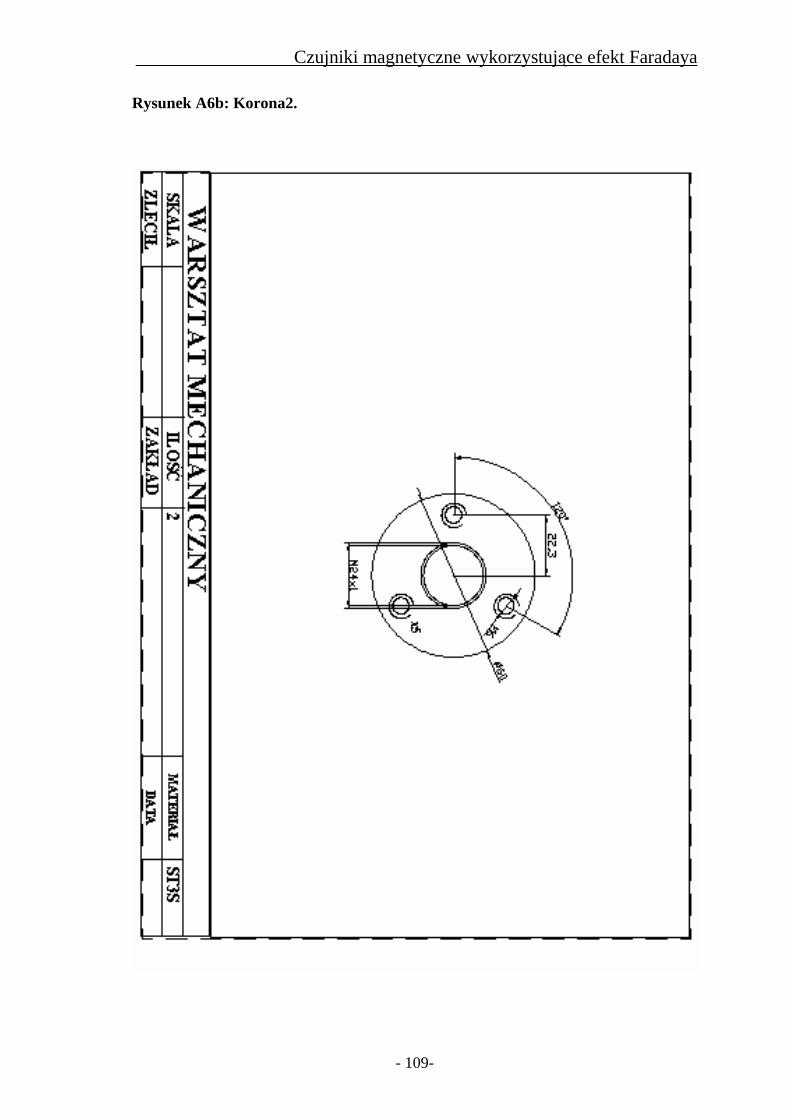
Czujniki magnetyczne wykorzystujące efekt Faradaya
- 109-
Rysunek A6b: Korona2.
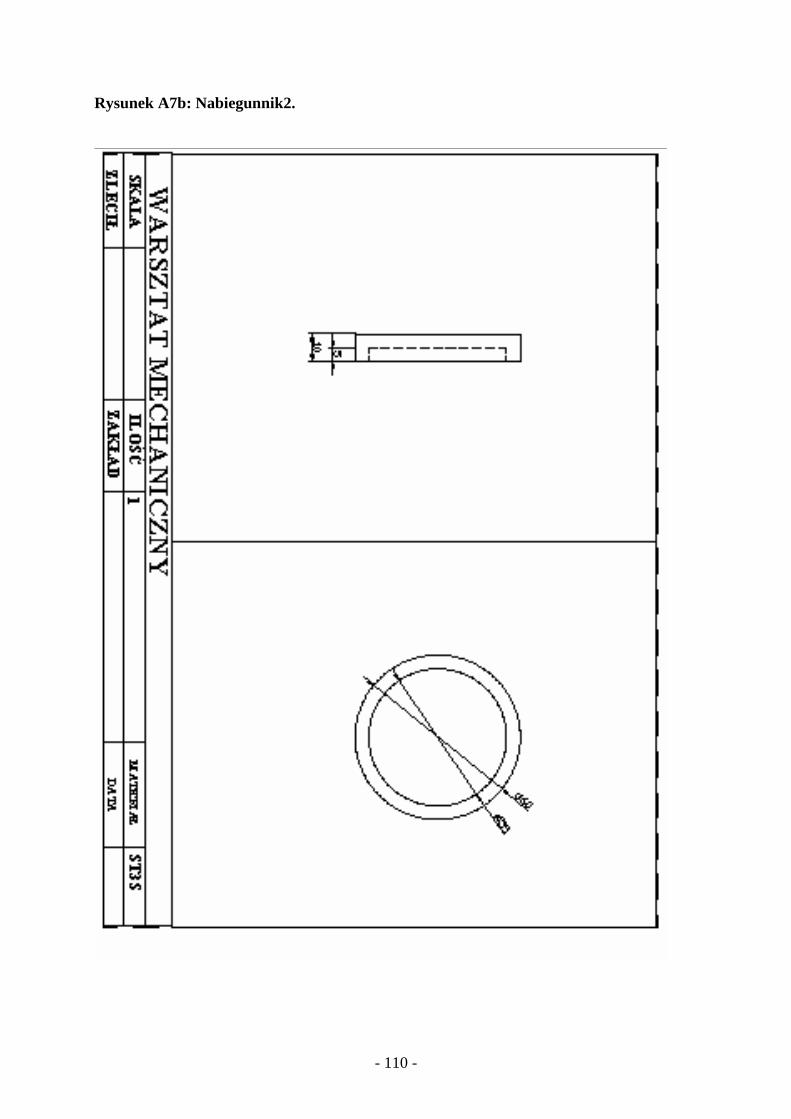
- 110 -
Rysunek A7b: Nabiegunnik2.











![„Strukturalne i magnetyczne własciwo´ sci magnetyków ... · 6 Charakterystyka badanych materiałów. 40 ... magnetyczne kompleksy metali postaci Fe8 lub Mn12 [11, 12]. W klastrze](https://img.dokumen.tips/doc/110x75/5c76daff09d3f220278c2403/strukturalne-i-magnetyczne-wlasciwo-sci-magnetykow-6-charakterystyka.jpg)