Embed Size (px)
Citation preview

Current Works• Corrected unit conversions in code• Found an error in calculating offset (to zero sensors)
– Fixed error, but still not accurately integrating to correct velocity/position
• Collected data on rotations, constant motion in one direction, and when stationary– Orientation data is fairly accurate, but gyroscopes do drift
over time– Accelerometer data needs more precise filtering
• Tried low pass, high pass, and started testing a band pass filter on accelerometer data– High pass should remove error due to incorrect offset
• Wrote Kalman filter m file for roll orientation

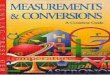
Stationary Test

Rotation Test
0 500 1000 1500 2000 2500 3000 3500 4000-150
-100
-50
0
50
100
X: 1564Y: 90.12
Orientation (Blue=x, Green=y, Red=z)
X: 797Y: -90
0 500 1000 1500 2000 2500 3000 3500 4000-15
-10
-5
0
5
10
15
X: 1564Y: 11.05
Acceleration (Blue=x, Green=y, Red=z)
X: 798Y: 9.444

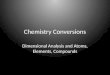
Move 1 meter in Y Direction
0 500 1000 1500 2000 2500 3000 3500 4000-2
-1.5
-1
-0.5
0
0.5
1
1.5Acceleration (Blue=x, Green=y, Red=z)
0 500 1000 1500 2000 2500 3000 3500 4000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6Velocity (Blue=x, Green=y, Red=z)
0 500 1000 1500 2000 2500 3000 3500 4000-8
-6
-4
-2
0
2
4Position (Blue=x, Green=y, Red=z)

What’s Next?
• Find and implement optimal filter for acceleration– Test on planar motion displacement
• Test Kalman filter for orientation• Integrate transformation matrix code to begin
testing with 3D motion