Embed Size (px)
Citation preview
Convolutional Neural Networks
CSC 4510/9010Andrew Keenan
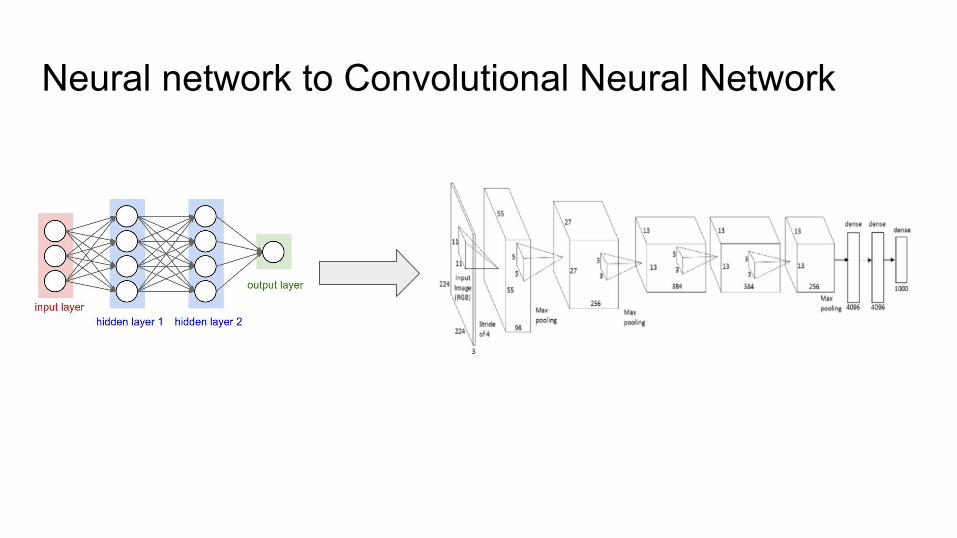
Neural network to Convolutional Neural Network
0.4
0.7
0.3

Neural Network Basics
0.4
0.7
0.3
NetworkIndividual Neuron

Backpropagation1. Compute forward pass of network2. Calculate error from expected value3. Backpropagate error signal to adjust
weights4. Repeat until convergence
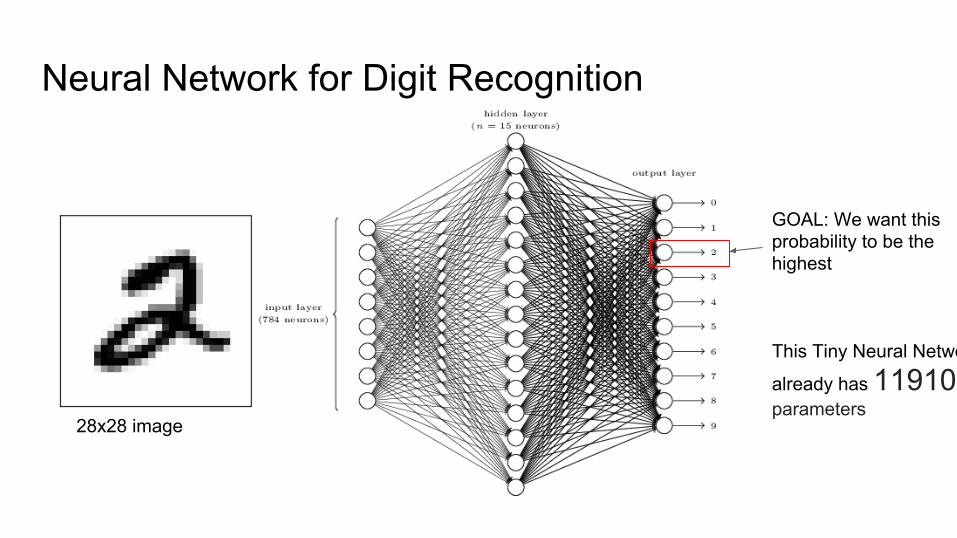
Neural Network for Digit Recognition
28x28 image
GOAL: We want this probability to be the highest
This Tiny Neural Network
already has 11910 parameters
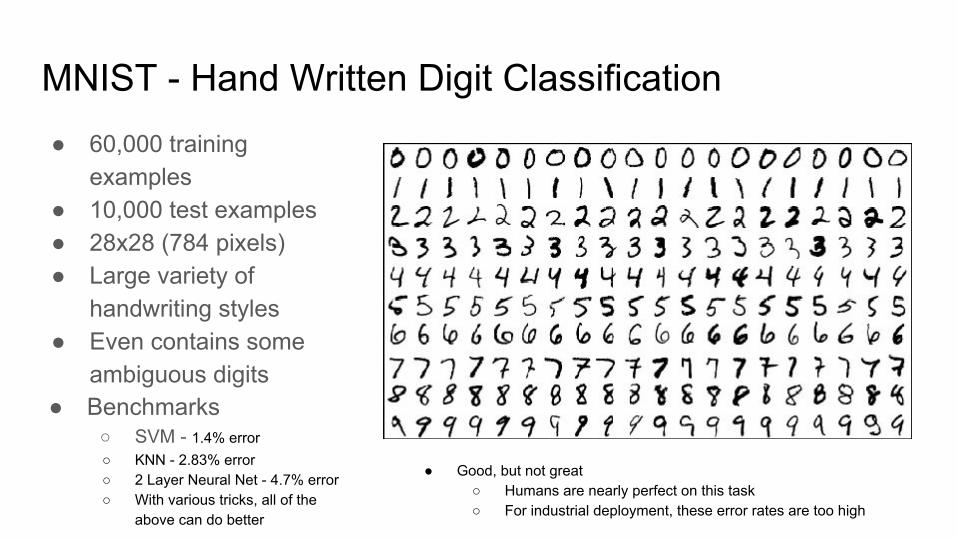
MNIST - Hand Written Digit Classification● 60,000 training
examples● 10,000 test examples● 28x28 (784 pixels)● Large variety of
handwriting styles● Even contains some
ambiguous digits● Benchmarks
○ SVM - 1.4% error○ KNN - 2.83% error○ 2 Layer Neural Net - 4.7% error○ With various tricks, all of the
above can do better
● Good, but not great○ Humans are nearly perfect on this task○ For industrial deployment, these error rates are too high
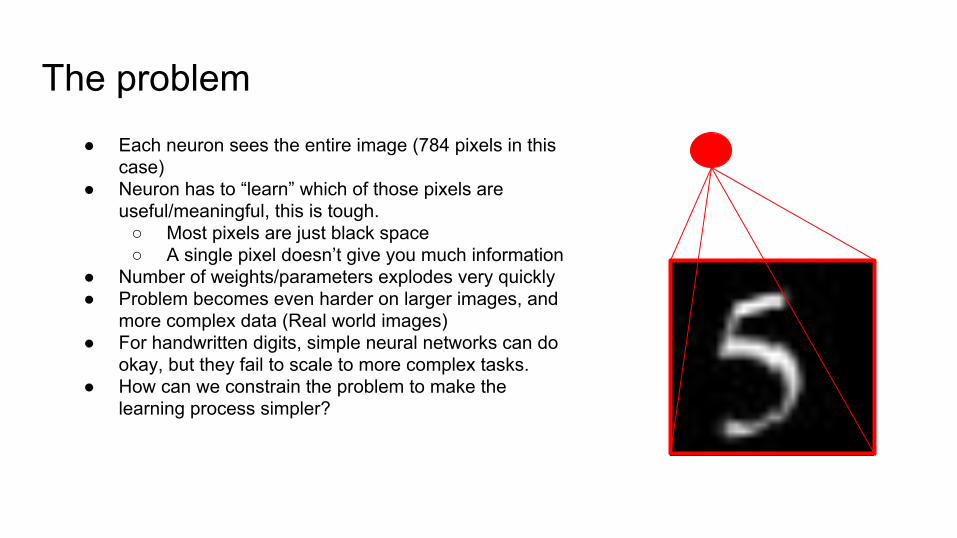
The problem● Each neuron sees the entire image (784 pixels in this
case)● Neuron has to “learn” which of those pixels are
useful/meaningful, this is tough.○ Most pixels are just black space○ A single pixel doesn’t give you much information
● Number of weights/parameters explodes very quickly● Problem becomes even harder on larger images, and
more complex data (Real world images)● For handwritten digits, simple neural networks can do
okay, but they fail to scale to more complex tasks.● How can we constrain the problem to make the
learning process simpler?

Permutation InvarianceThe simple Neural Network can be trained on permuted version of data
As long as permutation is consistent across entire dataset.
Neural Network has no problem with this, but the problem becomes impossible for Humans. What does this say about the difference between how we process images, and how Neural Nets do?
=
f( x1*w1 + x2*w2 + x3*w3…..) = f( x3*w3 + x2*w2 + x1*w1…….)
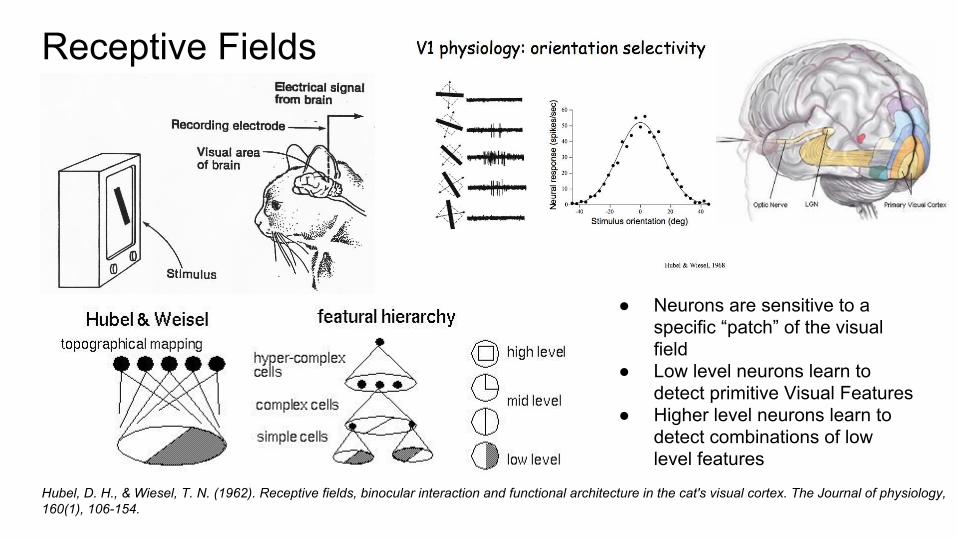
Receptive Fields
Hubel, D. H., & Wiesel, T. N. (1962). Receptive fields, binocular interaction and functional architecture in the cat's visual cortex. The Journal of physiology, 160(1), 106-154.
● Neurons are sensitive to a specific “patch” of the visual field
● Low level neurons learn to detect primitive Visual Features
● Higher level neurons learn to detect combinations of low level features
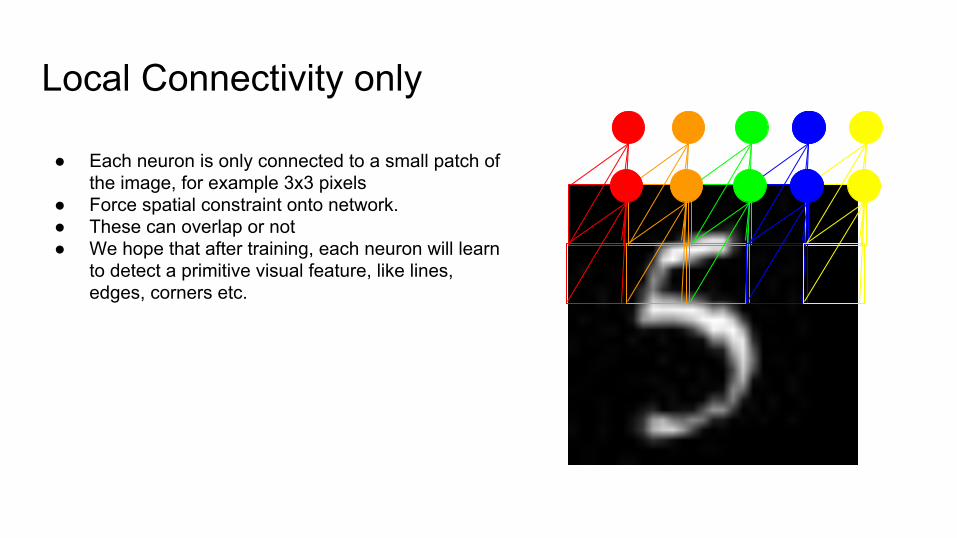
Local Connectivity only
● Each neuron is only connected to a small patch of the image, for example 3x3 pixels
● Force spatial constraint onto network. ● These can overlap or not● We hope that after training, each neuron will learn
to detect a primitive visual feature, like lines, edges, corners etc.
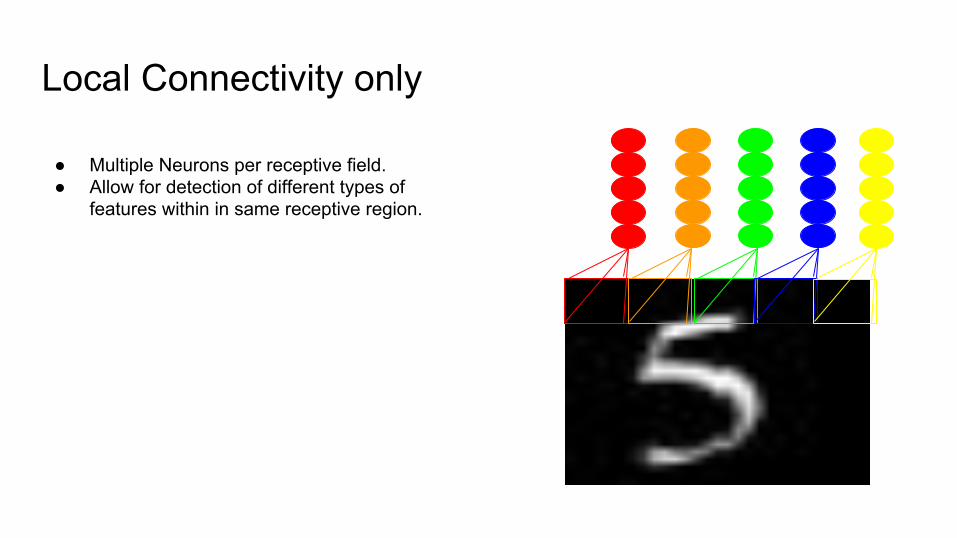
Local Connectivity only
● Multiple Neurons per receptive field.● Allow for detection of different types of
features within in same receptive region.
Redundancy and Translational Sensitivity
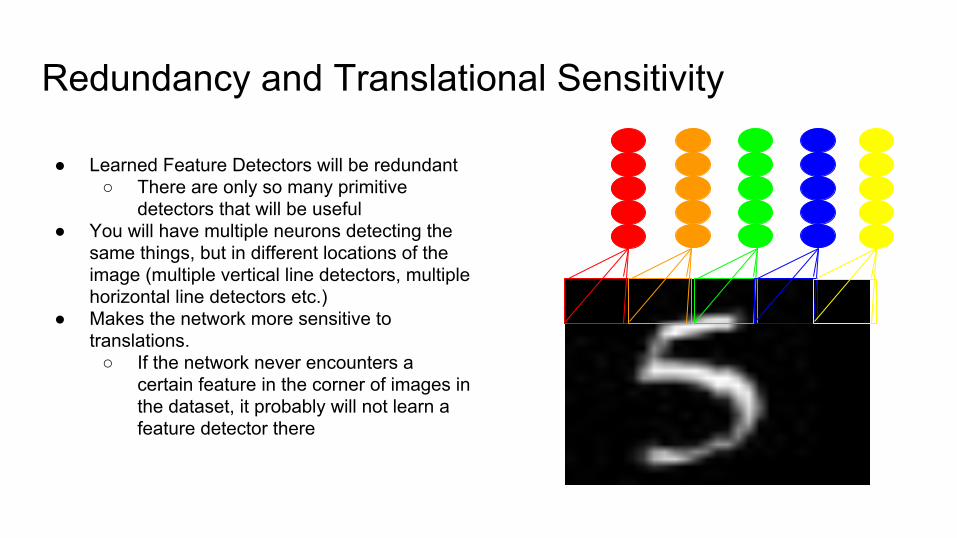
● Learned Feature Detectors will be redundant○ There are only so many primitive
detectors that will be useful● You will have multiple neurons detecting the
same things, but in different locations of the image (multiple vertical line detectors, multiple horizontal line detectors etc.)
● Makes the network more sensitive to translations.
○ If the network never encounters a certain feature in the corner of images in the dataset, it probably will not learn a feature detector there

Share Parameters between columns
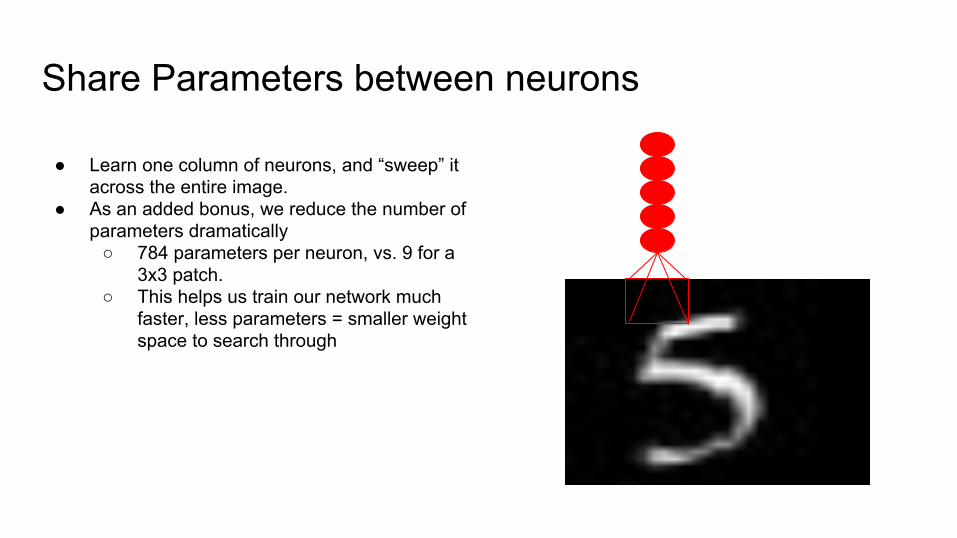
● Learn one column of neurons, and “sweep” it across the entire image.
● As an added bonus, we reduce the number of parameters dramatically
○ 784 parameters per neuron, vs. 9 for a 3x3 patch.
○ This helps us train our network much faster, less parameters = smaller weight space to search through
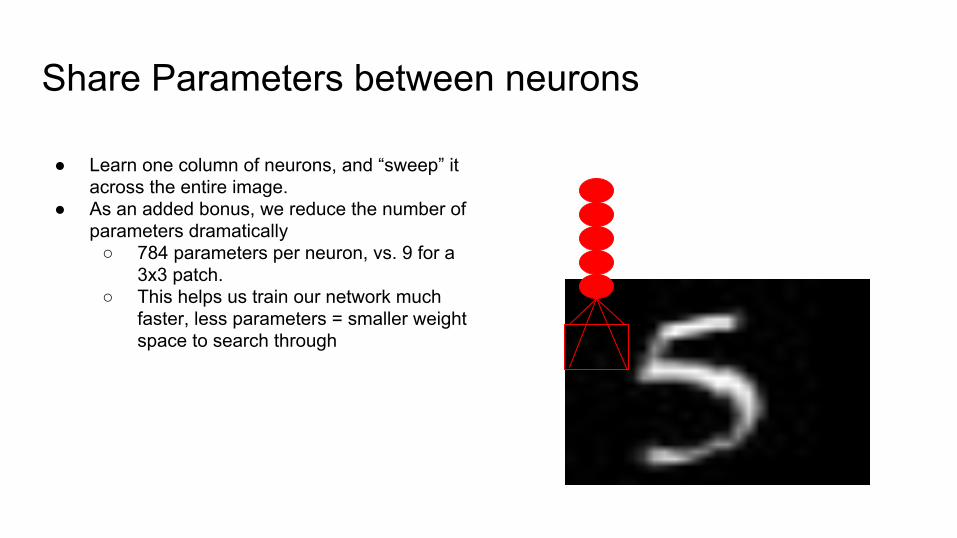
Share Parameters between neurons
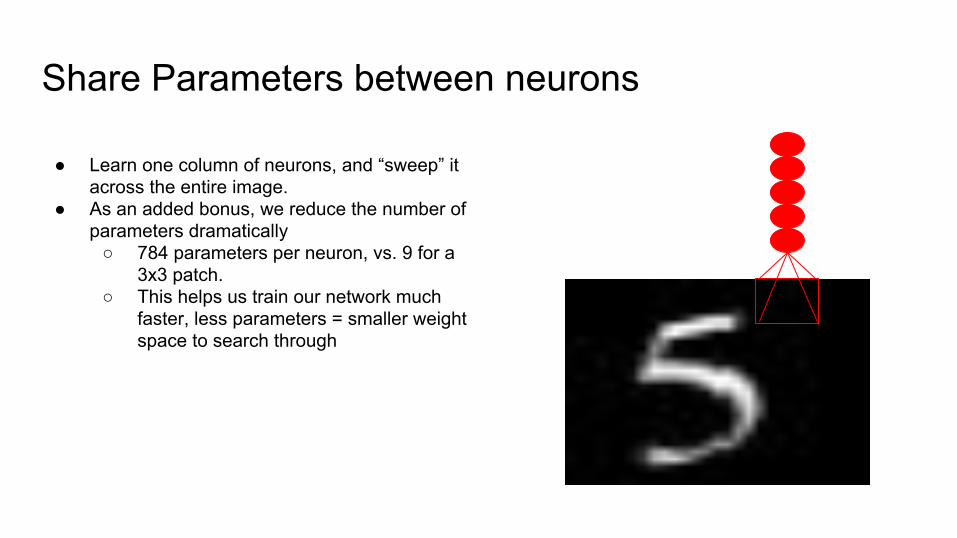
● Learn one column of neurons, and “sweep” it across the entire image.
● As an added bonus, we reduce the number of parameters dramatically
○ 784 parameters per neuron, vs. 9 for a 3x3 patch.
○ This helps us train our network much faster, less parameters = smaller weight space to search through

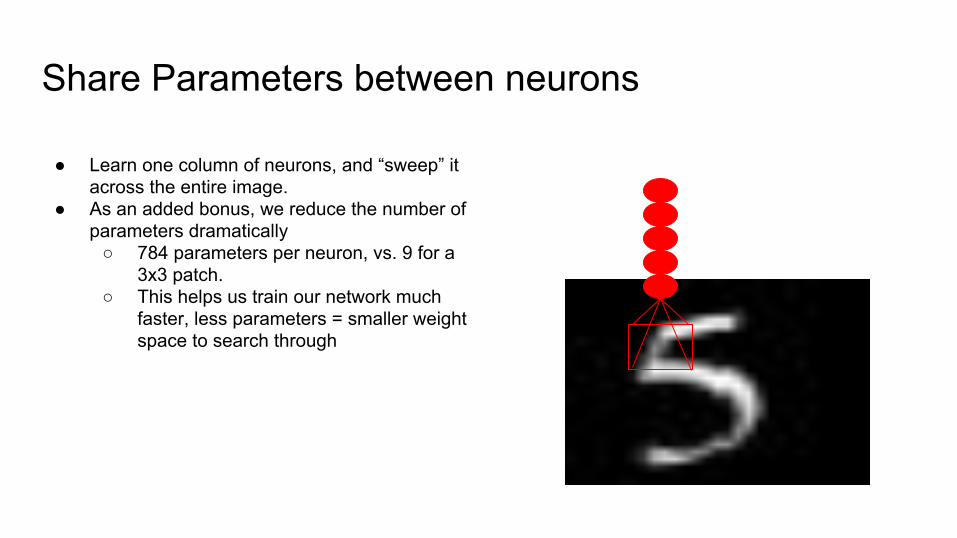
Share Parameters between neurons
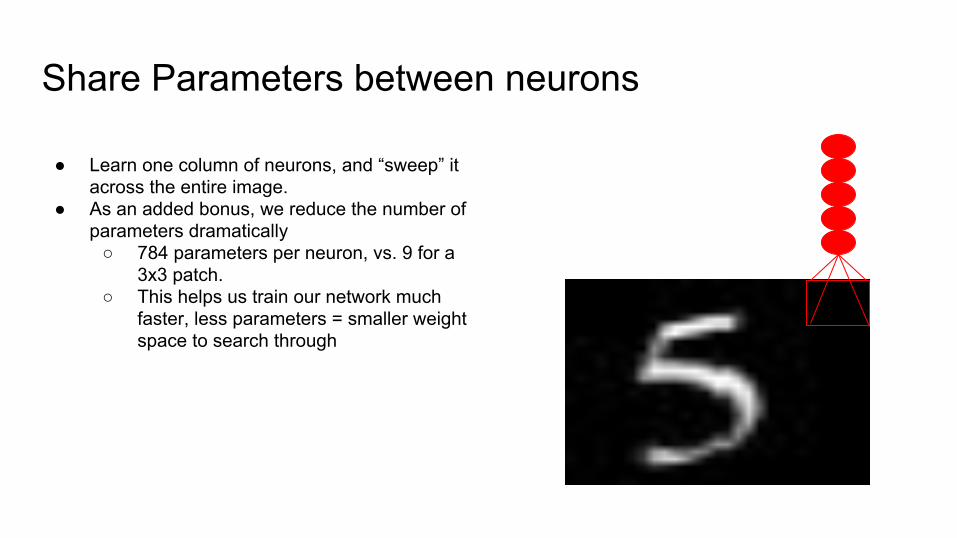
● Learn one column of neurons, and “sweep” it across the entire image.
● As an added bonus, we reduce the number of parameters dramatically
○ 784 parameters per neuron, vs. 9 for a 3x3 patch.
○ This helps us train our network much faster, less parameters = smaller weight space to search through
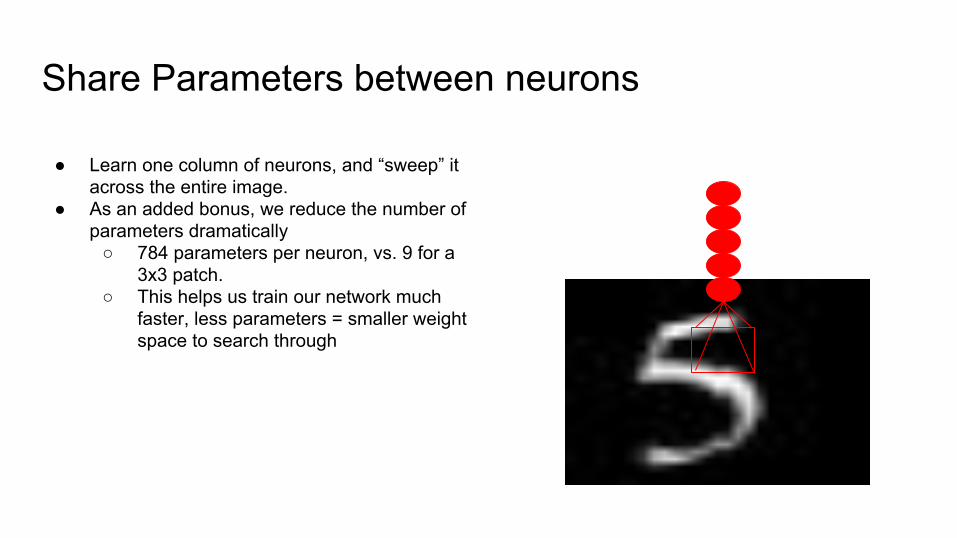
Share Parameters between neurons
● Learn one column of neurons, and “sweep” it across the entire image.
● As an added bonus, we reduce the number of parameters dramatically
○ 784 parameters per neuron, vs. 9 for a 3x3 patch.
○ This helps us train our network much faster, less parameters = smaller weight space to search through
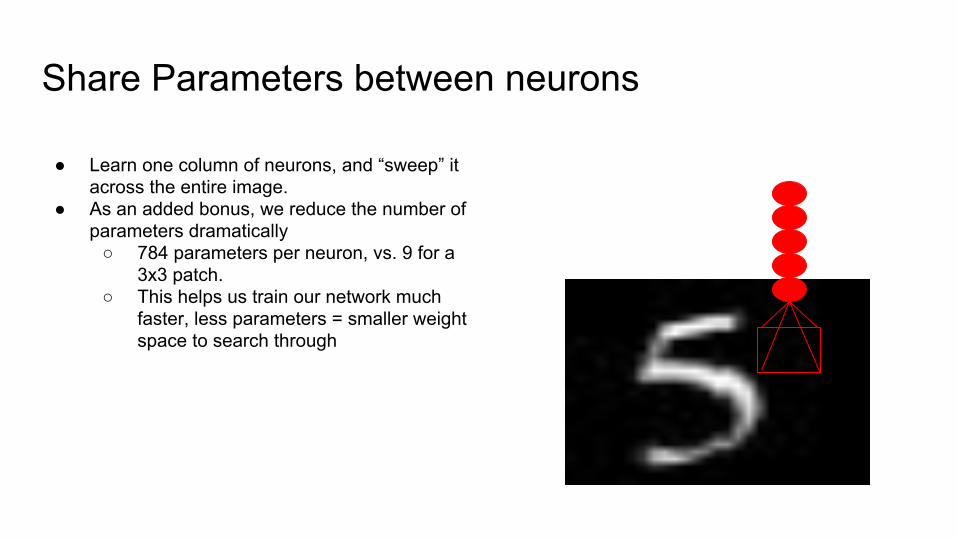
Share Parameters between neurons
● Learn one column of neurons, and “sweep” it across the entire image.
● As an added bonus, we reduce the number of parameters dramatically
○ 784 parameters per neuron, vs. 9 for a 3x3 patch.
○ This helps us train our network much faster, less parameters = smaller weight space to search through
Share Parameters between neurons
● Learn one column of neurons, and “sweep” it across the entire image.
● As an added bonus, we reduce the number of parameters dramatically
○ 784 parameters per neuron, vs. 9 for a 3x3 patch.
○ This helps us train our network much faster, less parameters = smaller weight space to search through
Share Parameters between neurons
● Learn one column of neurons, and “sweep” it across the entire image.
● As an added bonus, we reduce the number of parameters dramatically
○ 784 parameters per neuron, vs. 9 for a 3x3 patch.
○ This helps us train our network much faster, less parameters = smaller weight space to search through
Share Parameters between neurons
● Learn one column of neurons, and “sweep” it across the entire image.
● As an added bonus, we reduce the number of parameters dramatically
○ 784 parameters per neuron, vs. 9 for a 3x3 patch.
○ This helps us train our network much faster, less parameters = smaller weight space to search through
Share Parameters between neurons
● Learn one column of neurons, and “sweep” it across the entire image.
● As an added bonus, we reduce the number of parameters dramatically
○ 784 parameters per neuron, vs. 9 for a 3x3 patch.
○ This helps us train our network much faster, less parameters = smaller weight space to search through

Share Parameters between neurons
● Learn one column of neurons, and “sweep” it across the entire image.
● As an added bonus, we reduce the number of parameters dramatically
○ 784 parameters per neuron, vs. 9 for a 3x3 patch.
○ This helps us train our network much faster, less parameters = smaller weight space to search through
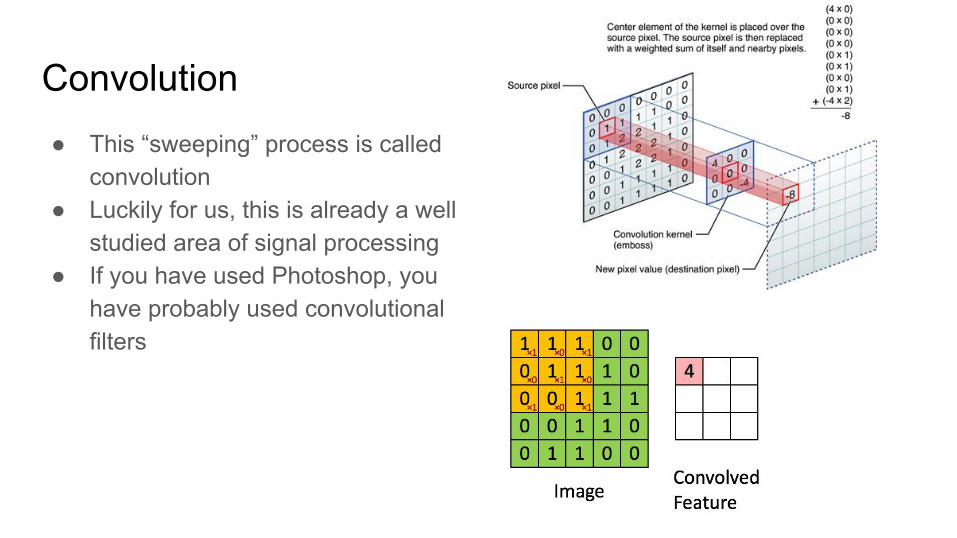
Convolution● This “sweeping” process is called
convolution● Luckily for us, this is already a well
studied area of signal processing● If you have used Photoshop, you
have probably used convolutional filters
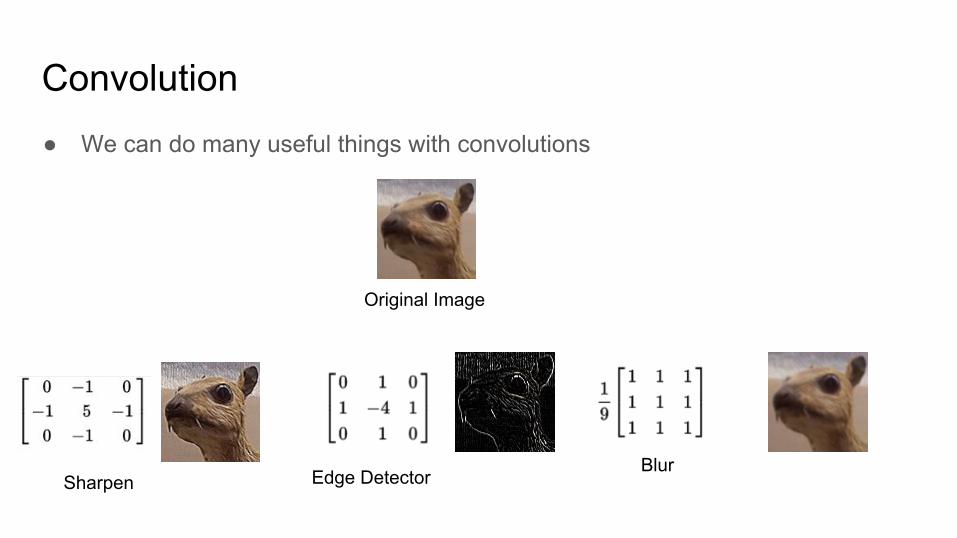
Convolution● We can do many useful things with convolutions
Edge DetectorBlur
Sharpen
Original Image

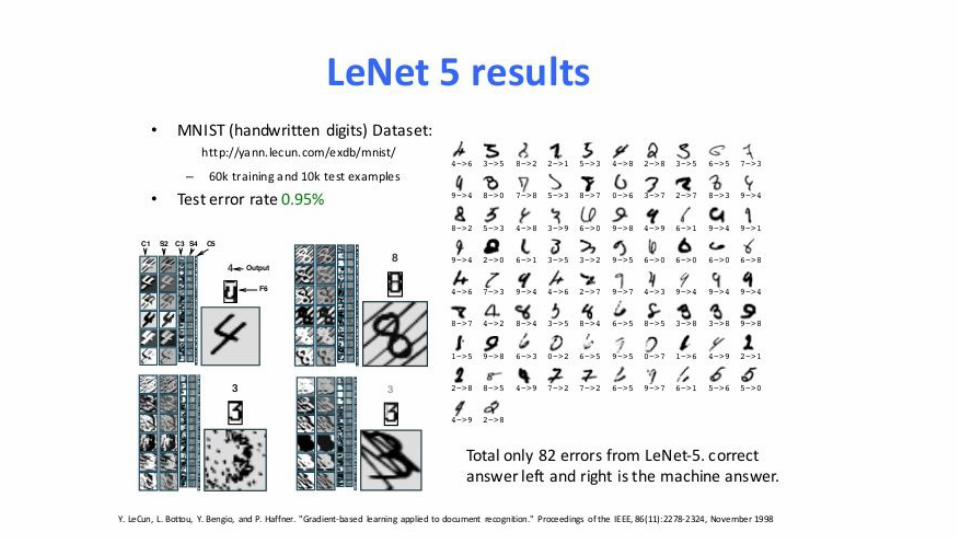
Add More layers - LeNet - Yann LeCun et. All (1989)
● Convolve multiple filters across image.
● Each filter produces a feature map,
○ basically a
filtered version of the image
● Treat feature maps like new images, convolve over them again
● Feature maps are subsampled (typically using max pooling)○ Basically just there to decrease image
size/# of parameters
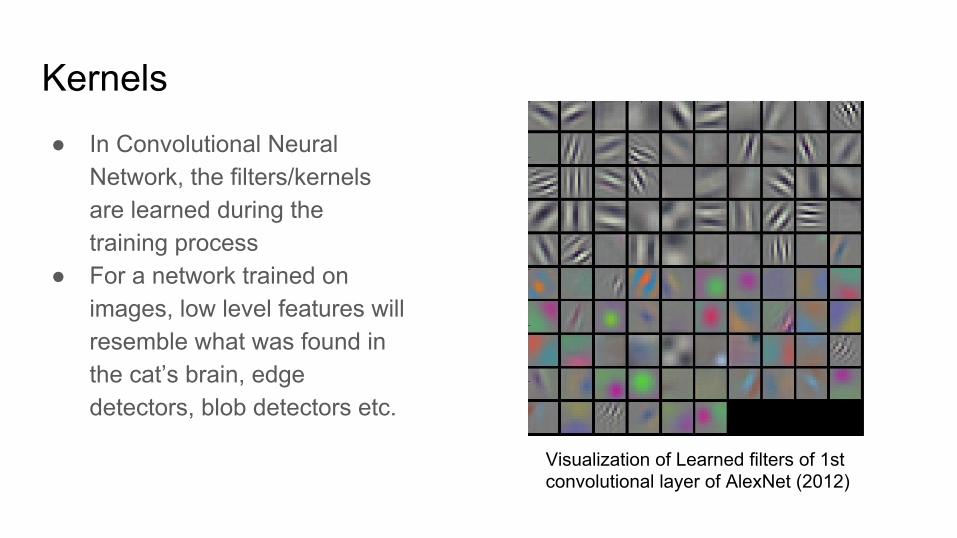
Kernels● In Convolutional Neural
Network, the filters/kernels are learned during the training process
● For a network trained on images, low level features will resemble what was found in the cat’s brain, edge detectors, blob detectors etc.
Visualization of Learned filters of 1st convolutional layer of AlexNet (2012)


Learn a Hierarchy of features

Decompose the Problem into easier problems
PixelsLines/Edges Shapes
Objects
MNIST is kind of simple● MNIST has sanitized data specifically designed as a machine learning
benchmark○ Real world images are messier and more complex
● Linear classifiers can get under 1% error rate with a few tricks + preprocessing
● Lets try something more difficult
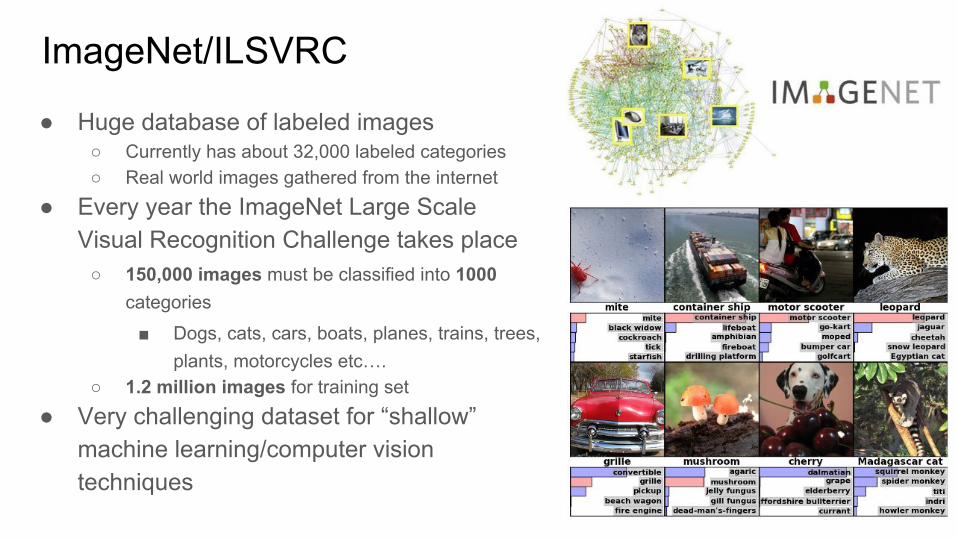
ImageNet/ILSVRC
● Huge database of labeled images○ Currently has about 32,000 labeled categories○ Real world images gathered from the internet
● Every year the ImageNet Large Scale Visual Recognition Challenge takes place
○ 150,000 images must be classified into 1000 categories
■ Dogs, cats, cars, boats, planes, trains, trees, plants, motorcycles etc….
○ 1.2 million images for training set
● Very challenging dataset for “shallow” machine learning/computer vision techniques
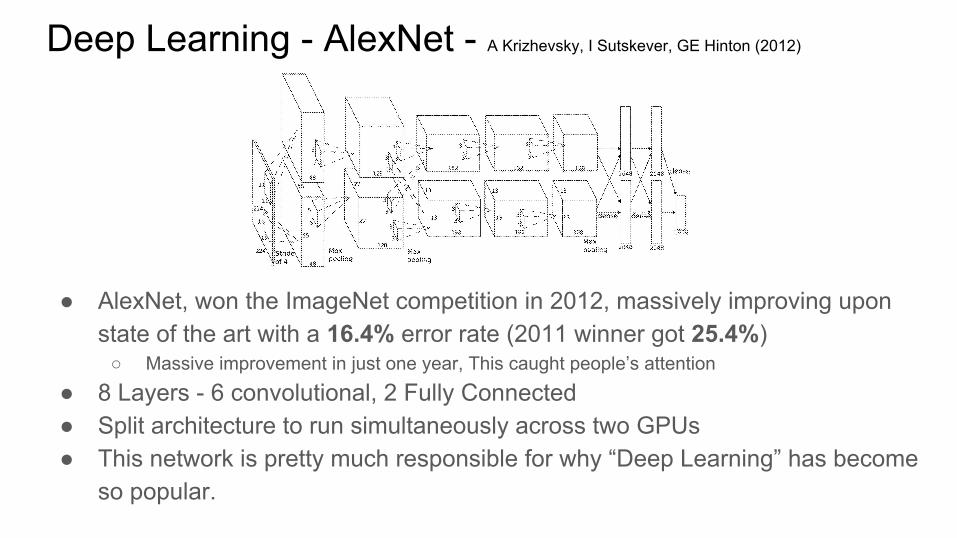
Deep Learning - AlexNet - A Krizhevsky, I Sutskever, GE Hinton (2012)
● AlexNet, won the ImageNet competition in 2012, massively improving upon state of the art with a 16.4% error rate (2011 winner got 25.4%)
○ Massive improvement in just one year, This caught people’s attention
● 8 Layers - 6 convolutional, 2 Fully Connected● Split architecture to run simultaneously across two GPUs● This network is pretty much responsible for why “Deep Learning” has become
so popular.
GPUs make all of this possible● Training AlexNet took about 6-7 days on a 2 GPUs. Training it on a 16 core
CPU takes 3-4 weeks● GPUs are designed to do matrix-matrix and matrix-vector multiplications very
quickly○ Neural networks are basically just a chain of matrix-vector multiplications (Weight matrix
vector).○ We can train multiple input vector batches at the same time○ Convolution can also be done very fast on GPU
● Thanks to gamers, GPUs have become fast and cheap
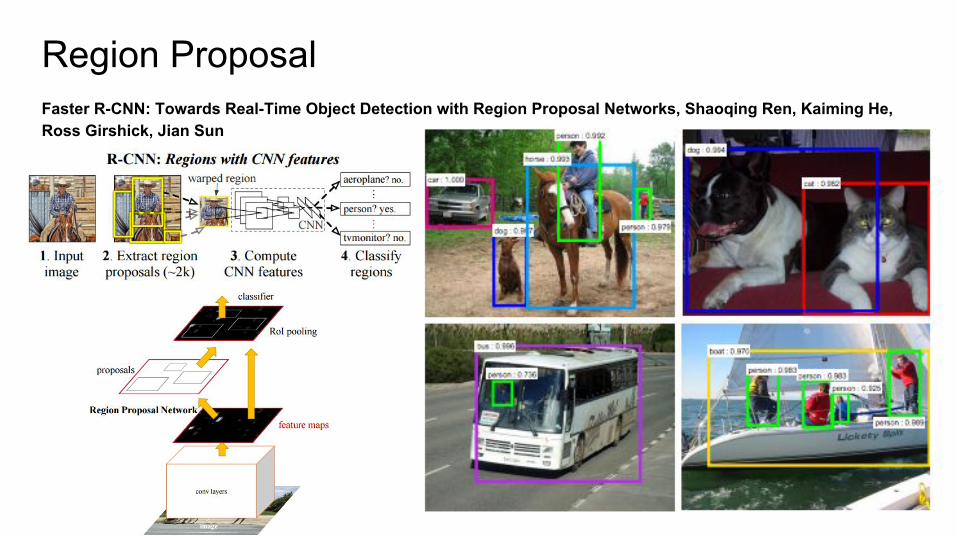
Region ProposalFaster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks, Shaoqing Ren, Kaiming He, Ross Girshick, Jian Sun
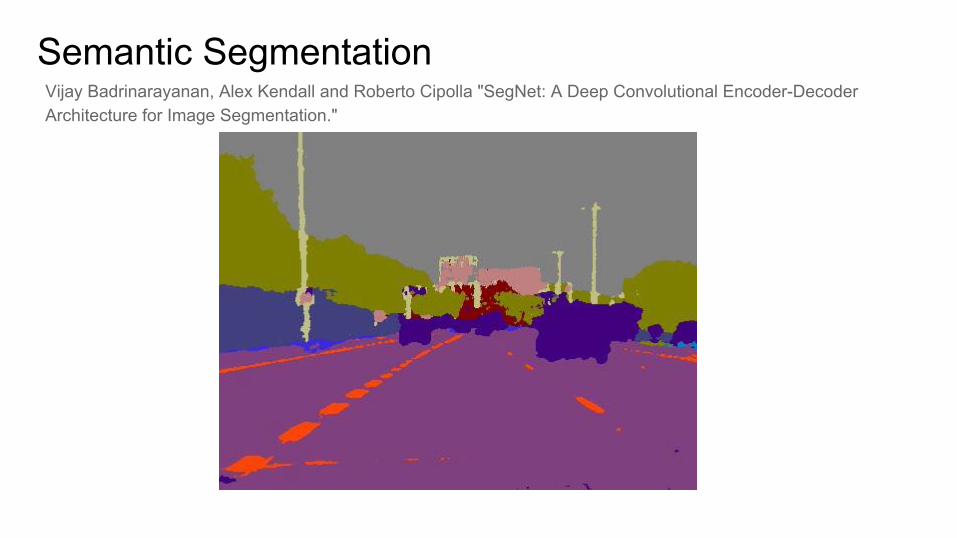
Semantic SegmentationVijay Badrinarayanan, Alex Kendall and Roberto Cipolla "SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation."
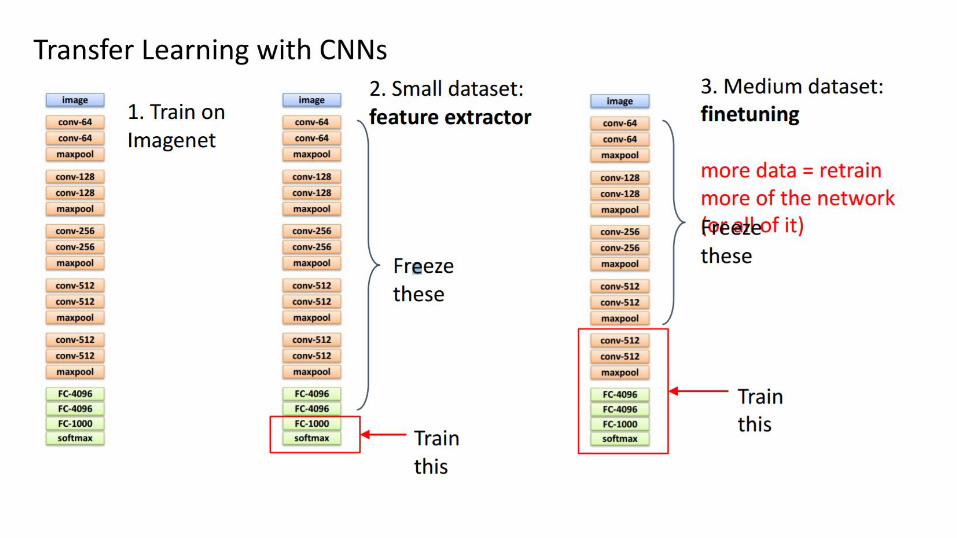
Transfer Learning● Our Neural Network learns a very rich set of feature detector filters● Low level feature detectors are very general (Lines, edges)● 1.2 Million Training images were used to train AlexNet
○ Most problems won’t have that amount of data
● Lets try to reuse our feature detectors for other problems where we have much smaller datasets
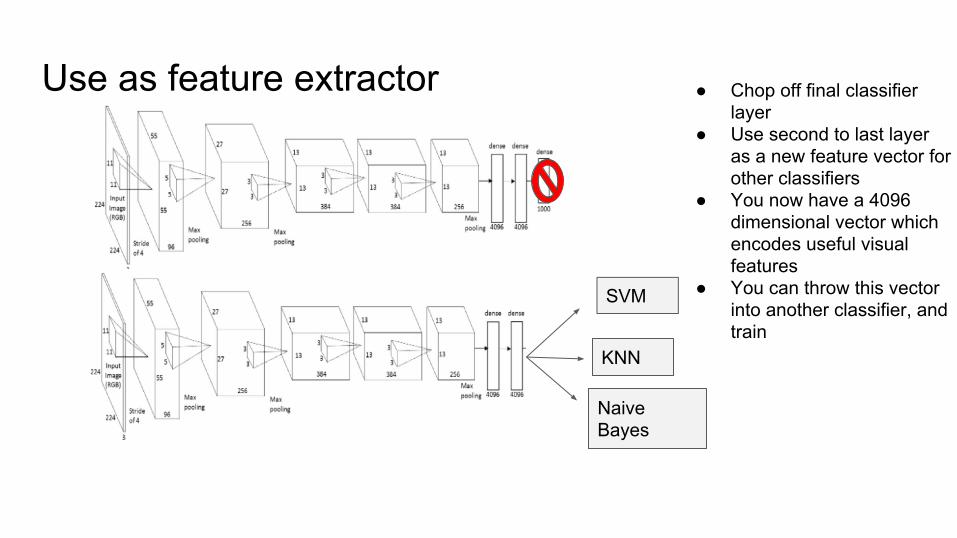
Use as feature extractor ● Chop off final classifier layer
● Use second to last layer as a new feature vector for other classifiers
● You now have a 4096 dimensional vector which encodes useful visual features
● You can throw this vector into another classifier, and train
SVM
KNN
Naive Bayes
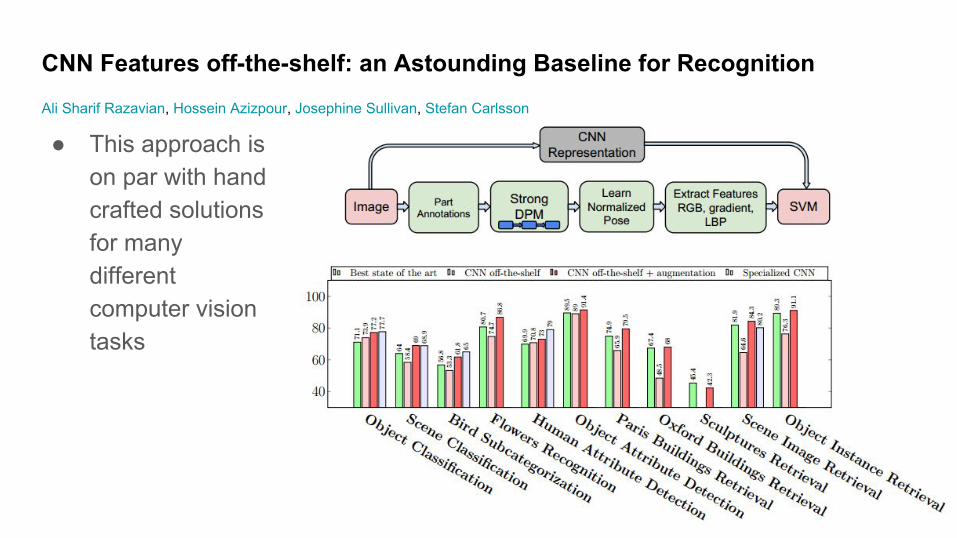
● This approach is on par with hand crafted solutions for many different computer vision tasks
CNN Features off-the-shelf: an Astounding Baseline for Recognition
Ali Sharif Razavian, Hossein Azizpour, Josephine Sullivan, Stefan Carlsson
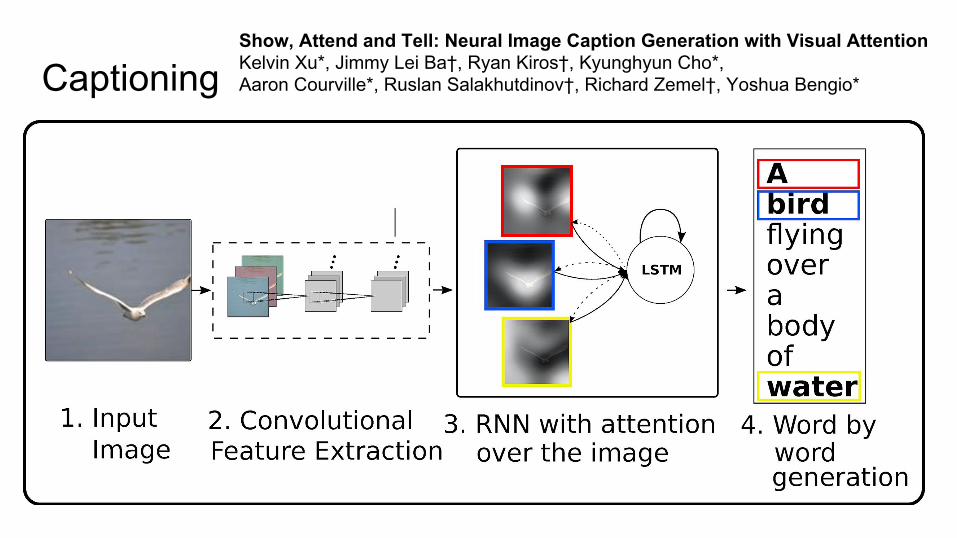
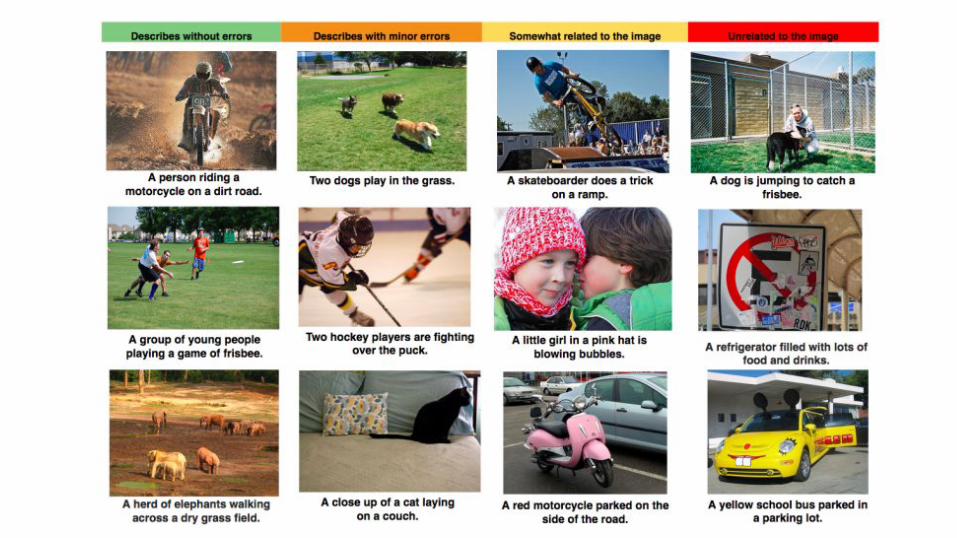
CaptioningShow, Attend and Tell: Neural Image Caption Generation with Visual AttentionKelvin Xu*, Jimmy Lei Ba†, Ryan Kiros†, Kyunghyun Cho*,Aaron Courville*, Ruslan Salakhutdinov†, Richard Zemel†, Yoshua Bengio*
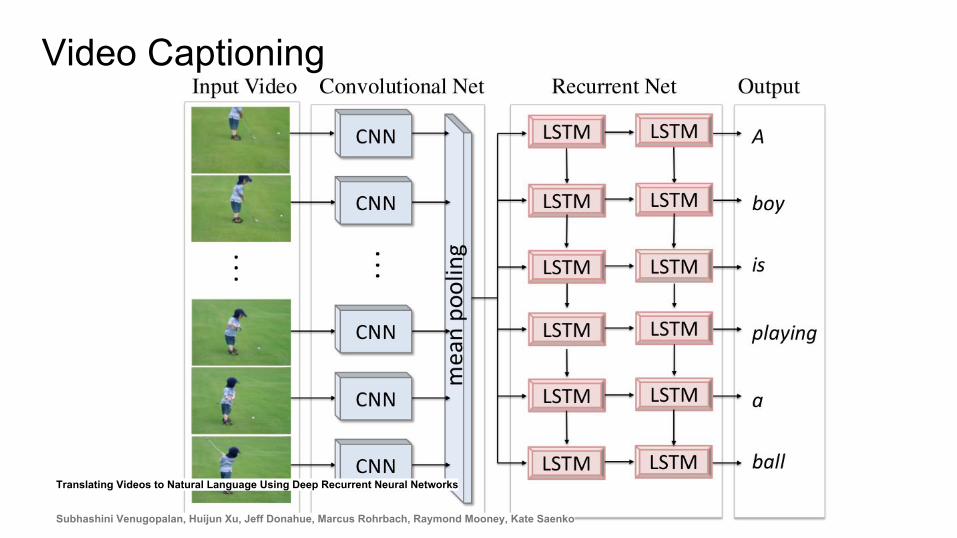
Video Captioning
Translating Videos to Natural Language Using Deep Recurrent Neural Networks
Subhashini Venugopalan, Huijun Xu, Jeff Donahue, Marcus Rohrbach, Raymond Mooney, Kate Saenko
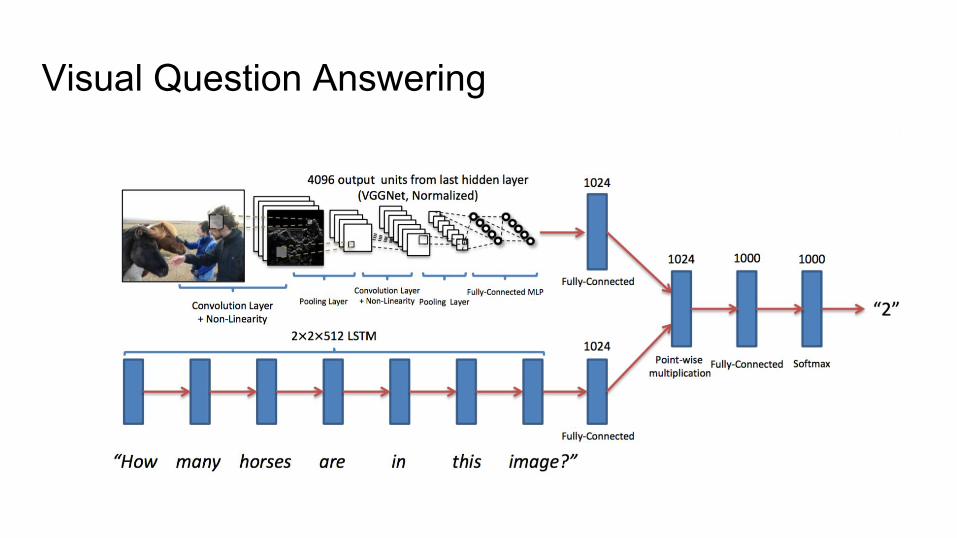
Visual Question Answering
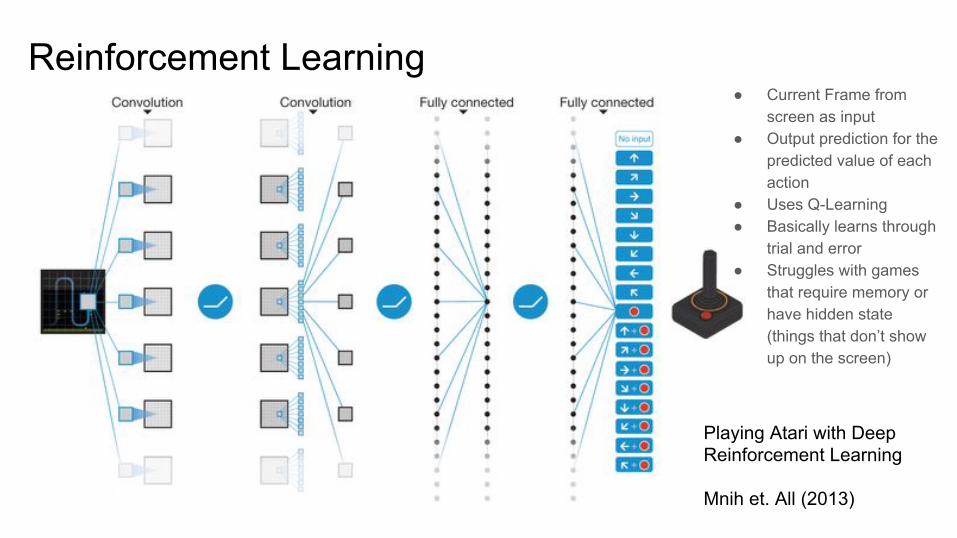
Reinforcement Learning● Current Frame from
screen as input● Output prediction for the
predicted value of each action
● Uses Q-Learning● Basically learns through
trial and error● Struggles with games
that require memory or have hidden state (things that don’t show up on the screen)
Playing Atari with Deep Reinforcement Learning
Mnih et. All (2013)

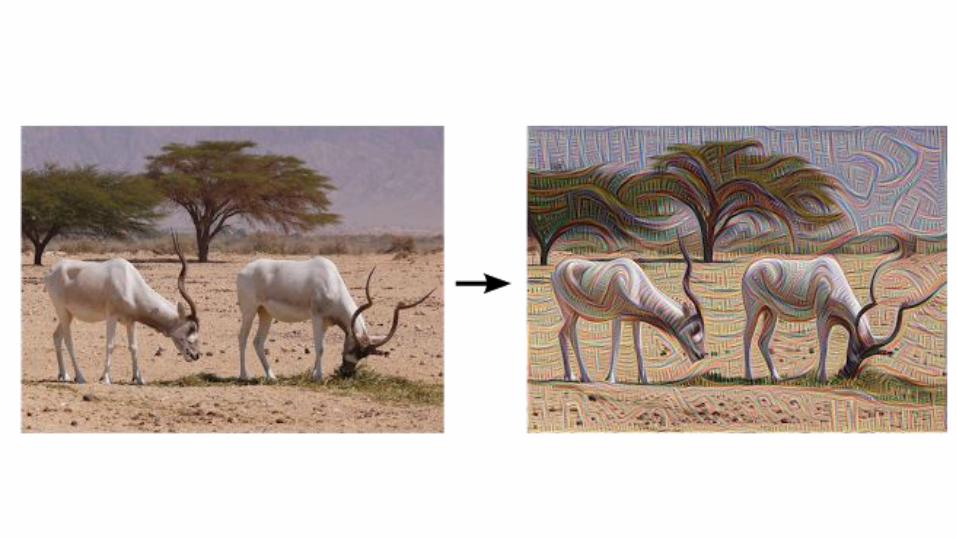
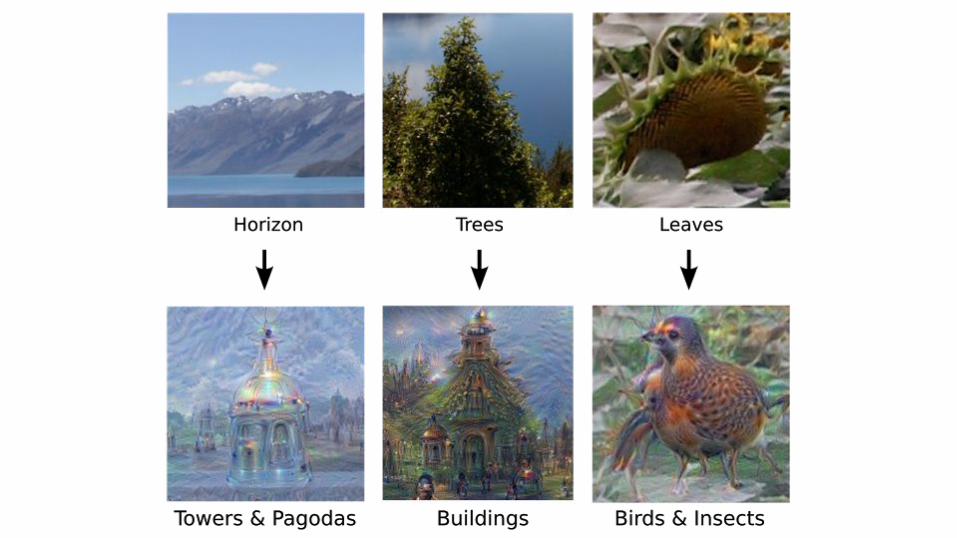
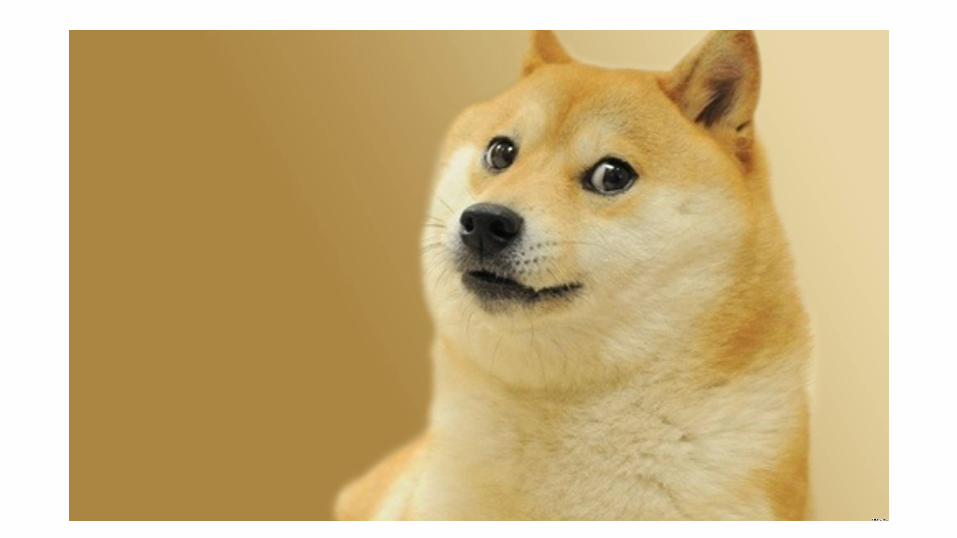
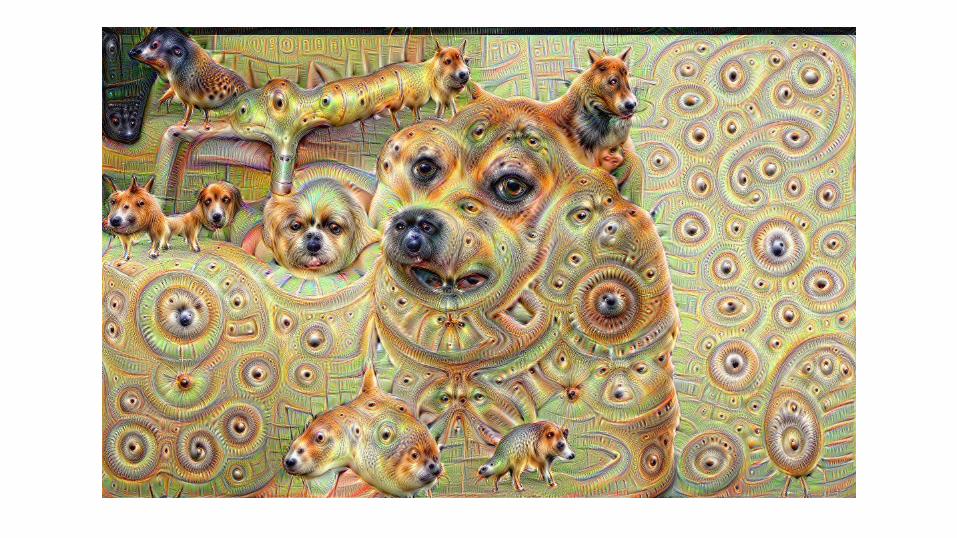
Inceptionism/Deep Dream - How do CNNs “see” things


Style Transfer


Keras● Simple and Easy to use Python Library for Deep
Learning● Can run on top of TensorFlow or Theano● Simple, high level code to get the job done
Deeplearning4J● Java Library for Deep learning● Designed for enterprise scale deployment● Good tutorials and Documentation
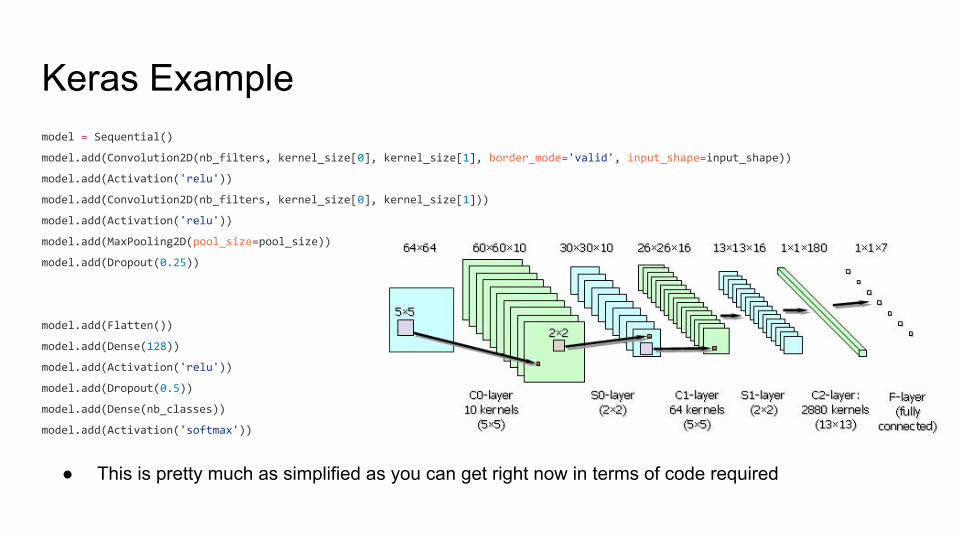
Keras Examplemodel = Sequential()
model.add(Convolution2D(nb_filters, kernel_size[0], kernel_size[1], border_mode='valid', input_shape=input_shape))
model.add(Activation('relu'))
model.add(Convolution2D(nb_filters, kernel_size[0], kernel_size[1]))
model.add(Activation('relu'))
model.add(MaxPooling2D(pool_size=pool_size))
model.add(Dropout(0.25))
model.add(Flatten())
model.add(Dense(128))
model.add(Activation('relu'))
model.add(Dropout(0.5))
model.add(Dense(nb_classes))
model.add(Activation('softmax'))
● This is pretty much as simplified as you can get right now in terms of code required

Libraries

The End
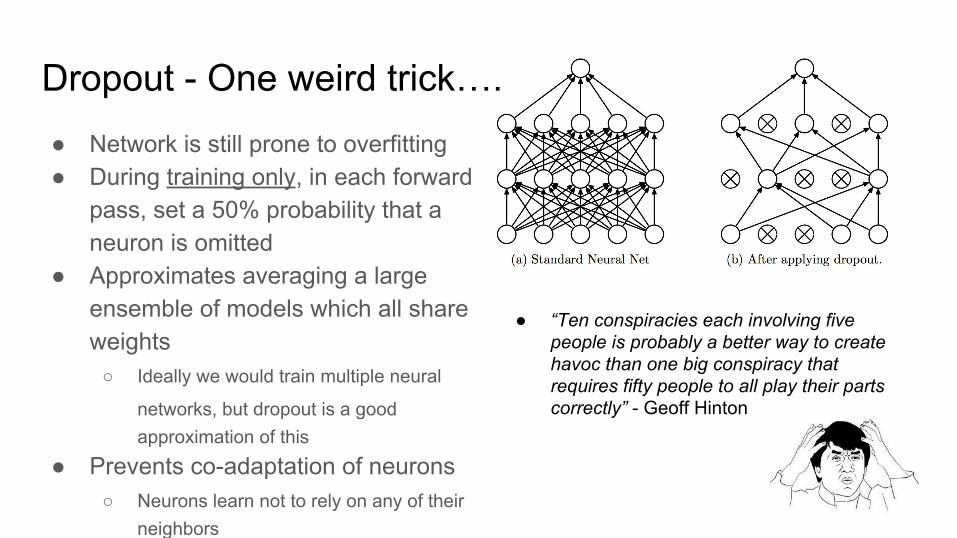
● Network is still prone to overfitting● During training only, in each forward
pass, set a 50% probability that a neuron is omitted
● Approximates averaging a large ensemble of models which all share weights
○ Ideally we would train multiple neural
networks, but dropout is a good approximation of this
● Prevents co-adaptation of neurons○ Neurons learn not to rely on any of their
neighbors
Dropout - One weird trick….
● “Ten conspiracies each involving five people is probably a better way to create havoc than one big conspiracy that requires fifty people to all play their parts correctly” - Geoff Hinton











![Constrained Convolutional Neural Networks for …vgg/rg/slides/ccnn1.pdf · Constrained Convolutional Neural Networks for Weakly Supervised Segmentation ... [CCNN] Convolutional Neural](https://img.dokumen.tips/doc/110x75/5baa6a3809d3f2c9618bd4b3/constrained-convolutional-neural-networks-for-vggrgslidesccnn1pdf-constrained.jpg)

















