Embed Size (px)
Citation preview
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
1
CONTROLADORES
LÓGICOS
PROGRAMABLES
M. en A. Agustín Figueroa Nicolás
Manual de Prácticas de PLC.
© El autor, 2003; © Edición FINA, 2003
PLC
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
2
Prólogo.
El presente Manual de Prácticas de Controladores Lógicos Programables es una parte de la
temática general de programación para los PLC, la falta de una obra como la que se presenta en este
Manual.
En efecto, las fuentes de información que se utilizan en la actualidad en el desarrollo del Manual se
toman en cuenta la parte técnica al desarrollo o de actividades prácticas y de laboratorio, se centra en
libros que a menudo presentan un contenido excesivamente teórico o en manuales en los que es
notorio la huella y el apoyo de marcas comerciales que a su vez aprovechan la ocasión para
promocionarse.
Es en este sentido que la presente obra cubre un espacio de aplicación específica y claras.
Un detallado análisis de su contenido pone de manifiesto los diferentes tipos de Programación en
KOP, FUP y AWL, para los PLC´s y se complementa para el diseño de la programación en Step7-
MICRO/WIN, SIMATIC S7-200 y PC-Simu con objetivos predefinidos.
Al llegar a este punto cabe señalar que el conocimiento, aunque sea a nivel de usuario, del
contenido mencionado es especialmente complejo; por ello es necesaria una descripción sencilla y
adecuada.
Esta es una de las características más notorias de la obra. Se han utilizado diferentes técnicas de
enseñanza para las distintas partes de la programación como la función de su estado o funcionalidad.
El diseño de los Controladores Lógicos Programables, con aplicaciones y un complemento
señalado como Anexos en el que se repasan ciertos conceptos de la programación, en aplicaciones
de Neumática e Hidráulica y conceptos de Lógica de Programación, para las operaciones a realizar en
la puesta en marcha o revisión de un circuito, así como la simbología y ejercicios completan en total
de la obra.
Una vez realizado todos los ejercicios de programación se pude utilizar también el programa de la
Tarjeta de Adquisición de Datos (Data_Asus_7404_PLC) para correr algunos programas, ejercicios y
obtener el resultado de las prácticas.
De todo lo expuesto se deduce fácilmente que se trata de una obra de aplicación en Escuelas
Técnicas, Escuelas Universitarias y similares, altamente recomendable al nivel de texto, pues
representan una obra básica en la compresión del Manual.
Agustín Figueroa Nicolás. Catedrático del Instituto Tecnológico Superior de A. (Departamento de Ingeniería Electromecánica) y de la Universidad Tecnológica de Puebla (Departamento de Electricidad y Electrónica Industrial).
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
3
Manual de Prácticas
Controladores Lógicos Programables.
Contenido: Página
Prólogo…………………………………………………………………………………. 2
Conceptos Básicos de PLC………………………………………………………….. 5
Introducción al programa Step7-MICRO/WIN y SIMATIC S7-200………………. 7
Operaciones con Temporizadores………………………………………………….. 12
No. Nombre de la Práctica.
1.- Introducción a los PLC y al STEP 7………………………………………………… 15
2.- Compuertas Lógicas Digitales Básicas (AND, OR, Inversora y Negación)……. 16
3.- Compuertas Lógicas Digitales Básicas (NOR, NAND, NOR-EX y XOR)………. 19
4.- Combinaciones Digitales Básicas…………………………………………………... 22
5.- Combinaciones Digitales Básicas (Conexiones diferentes)……………………… 24
6.- Conexiones en Paralelo……………………………………………………………… 27
7.- Conexiones en Serie…………………………………………………………………. 30
8.- Conexiones en Serie y Paralelo…………………………………………………….. 32
9.- Circuito de Control de Entradas/Salidas y Conversión de Código Binario a Octal…………………………………………………………………………………….
35
10.- Manejo de decodificador Binario a Decimal……………………………………….. 40
11.- Manejo de conversión Binario a Hexadecimal…………………………………….. 45
12.- Manejo de conversión Binario a un Abecedario…………………………………… 50
13.- Manejo de un Intermitente…………………………………………………………… 53
14.- Manejo de un Semáforo Simple…………………………………………………….. 55
15.- Paro y Arranque de un Motor……………………………………………………….. 57
16.- Encendido directo y apagado de un Motor mediante autorretención…………… 58
17.- Encendido y apagado de un Motor mediante un telerruptor…………………….. 59
18.- Control de dos Motores por medio de pulsadores de marcha y paro…………… 60
19.- Control de un Garaje…………………………………………………………………. 61
20.- Control de un Semáforo……………………………………………………………… 62
21.- Control de un Motor Trifásico con Desconexión Temporizada………………….. 63
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
4
Manual de Prácticas
Controladores Lógicos Programables.
Contenido:
No. Nombre de la Práctica. Página
22.- Control Simultáneo para dos Motores……………………………………………… 64
23.- Arranque ESTRELLA DELTA……………………………………………………….. 65
24.- Control electromagnético de un motor de CA de jaula de ardilla……………….. 66
25.- Arranque ESTRELLA DELTA y frenado electromagnético……………………… 67
26.- Control para una escalera electromecánica………………………………………. 68
27.- Control para una banda transportadora……………………………………………. 69
28.- Contador de objetos para banda transportadora………………………………….. 70
29.- Control FORWARD – REVERSE para un motor AC de jaula de ardilla……….. 71
30.- Control electromagnético para un motor de rotor devanado con cambio
selectivo de velocidad……………………………………………………………….. 72
Simulador de Tarjeta de Adquisición de datos
Data_Asus_7404_PLC. (Figueroa)……………………………………….. 73
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
5
Conceptos Básicos de PLC (Programmable Logic Controllers).
Los Controladores Lógicos Programables (PLC) continúan evolucionando a medida que las nuevas tecnologías se añaden a sus capacidades. El PLC se inició como un reemplazo para los bancos de relevos. Poco a poco, las matemáticas y la manipulación de funciones lógicas se añadieron. Hoy en día son los cerebros de la inmensa mayoría de la automatización, procesos y máquinas especiales en la industria. Los PLC‟s ahora son más pequeños en tamaños, más velocidad de las CPU y redes y tecnologías de comunicación diferentes.
Se puede pensar en un PLC como un pequeño computador industrial que ha sido altamente especializado para prestar la máxima confianza y máximo rendimiento en un ambiente industrial. En su esencia, un PLC mira sensores digitales y analógicos y switches (entradas), lee su programa de control, hace cálculos matemáticos y como resultado controla diferentes tipos de hardware (salidas) tales como válvulas, luces, relés, servomotores, etc. en un marco de tiempo de milisegundos.
Mientras los PLC‟s son muy buenos con el control rápido de información, no comparten los datos y las señales con facilidad. Comúnmente los PLC‟s intercambian información con paquetes de software en el nivel de planta como interfaces maquina operador (HMI) ó Control de Supervisión y Adquisición de Datos (SCADA). Todo intercambio de datos con el nivel de negocios de la empresa (servicios de información, programación, sistemas de contabilidad y análisis) tiene que ser recogido, convertido y transmitido a través de un paquete SCADA.
Típicamente en la mayoría de PLC‟s, las redes de comunicación son exclusivas de la marca y con velocidad limitada. Con la aceptación de Ethernet, las velocidades de comunicación de la red han aumentado, pero todavía a veces usan se usan protocolos de propiedad de cada marca.
Nuevas tendencias.
En general, los PLC son cada vez más rápidos y más pequeños y como resultado de esto, están ganando capacidades que solían ser dominio exclusivo de la computadora personal (PC) y de las estaciones de trabajo. Esto se traduce en manejo datos críticos de manera rápida que se comparte entre el PLC en el piso de la fábrica y el nivel de negocios de la empresa. Ya no se trata de los PLC‟s antiguos que únicamente controlaban salidas a partir de una lógica y de unas entradas.
Algunas de las características que un PLC puede aportar a sus proyectos de automatización son los servidores web, servidores FTP, envío de e-mail y Bases de Datos Relacionales Internas.
Estructura de un PLC.
Un PLC se puede definir como un sistema basado en un microprocesador. Sus partes fundamentales son la Unidad Central de Proceso (CPU), la Memoria y el Sistema de Entradas y Salidas (E/S). La CPU se encarga de todo el control interno y externo del PLC y de la interpretación de las instrucciones del programa. En base a las instrucciones almacenadas en la memoria y en los datos que lee de las entradas, genera las señales de las salidas. La memoria se divide en dos, la memoria de solo lectura o ROM y la memoria de lectura y escritura o RAM.
La memoria ROM almacena programas para el buen funcionamiento del sistema. La memoria RAM está conformada por la memoria de datos, en la que se almacena la
información de las entradas y salidas y por la memoria de usuario, en la que se almacena el programa que maneja la lógica del PLC.
El sistema de Entradas y Salidas recopila la información del proceso (Entradas) y genera las acciones de control del mismo (Salidas). Los dispositivos conectadas a las entradas pueden ser Pulsadores, interruptores, finales de carrera, termostatos, presostatos, detectores de nivel, detectores de proximidad, contactos auxiliares, etc. Al igual, los dispositivos de salida son también muy variados: Pilotos, relés, contactores, Drives o variadores de frecuencia, válvulas, etc.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
6
Entradas y salidas (E/S) - Inputs and Outputs (IO). Las entradas y salidas (E/S) de un PLC son digitales, analógicas o especiales. Las E/S digitales se
identifican por presentar dos estados diferentes: on u off, presencia o ausencia de tensión, contacto abierto o cerrado, etc. Los niveles de tensión de las entradas más comunes son 5 VDC, 24 VDC, 48 VDC y 220 VAC. Los dispositivos de salida más frecuentes son los relés.
Las E/S análogas se encargan de convertir una magnitud analógica (tensión o corriente)
equivalente a una magnitud física (temperatura, flujo, presión, etc.) en una expresión binaria. Esto se realiza mediante conversores analógico-digitales (ADC's). Por último, las E/S especiales se utilizan en procesos en los que con las anteriores E/S vistas son poco efectivas, bien porque es necesario un gran número de elementos adicionales, bien porque el programa necesita de muchas instrucciones o por protocolos especiales de comunicación que se necesitan para poder obtener el dato requerido por el PLC (HART, Salidas de trenes de impulso, motores paso a paso).
Funcionamiento del PLC.
Cuando se pone en marcha el PLC lo primero que este realiza es una lista de chequeos internos
para dar permitir que todo desde el inicio este en buenas condiciones y todo esté debidamente conectado (Power Supply, conexiones de entradas y salidas).
Una vez efectuadas estas comprobaciones y son aprobadas, la CPU inicia la exploración del
programa y reinicializa. Esto último si el autómata se encuentra en modo RUN (marcha), ya que de estar en modo STOP (paro) aguardaría, sin explorar el programa, hasta la puesta en RUN.
Al producirse el paso al modo STOP o si se interrumpe la tensión de alimentación durante un tiempo
lo suficientemente largo, la CPU detiene la exploración del programa y luego pone a cero, es decir, desactiva todas las salidas. Mientras se está ejecutando el programa, la CPU realiza en intervalos continuos de tiempo distintas funciones de diagnóstico (watch-dog). Cualquier singularidad que se detecte se mostrará en los indicadores de diagnóstico del procesador y dependiendo de su importancia se generará un código de error o se parará totalmente el sistema.
El tiempo total del ciclo de ejecución viene determinado por los tiempos empleados en las distintas
operaciones. El tiempo de exploración del programa es variable en función de la cantidad y tipo de las instrucciones así como de la ejecución de subrutinas. El tiempo de exploración es uno de los parámetros que caracteriza a un PLC y generalmente se suele expresar en milisegundos por cada mil instrucciones. Para reducir los tiempos de ejecución, algunas CPU's constan de dos o más procesadores que operan simultáneamente y están dedicados a funciones específicas.
Programar la memoria de un PLC. Al programar un PLC se necesita una interfaz entre el operador y el PLC para introducir en la
memoria de usuario el programa con las instrucciones que definen las secuencias de control. Normalmente esta interfaz se lleva acabo a través de software instalados en Computadores
personales (PC). Dependiendo del tipo de PLC el equipo de programación produce unos códigos de instrucción directamente ejecutables por el procesador o bien un código intermedio, que es interpretado por un programa residente en el procesador (firmware).
Las funciones de los equipos ó software de programación son la edición y modificación del
programa, detección de errores, archivamiento de programas (discos duros) y monitoreo en línea de variables. La conexión del PC al PLC comúnmente se realiza mediante una conexión en serie (generalmente la RS-232C o la RS-422). Hoy en día existen distintos puertos disponibles según la marca del PLC.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
7
Introducción.
El autómata utilizado en las prácticas es el SIMATIC S7-200 de Siemens con una CPU 214. Éste dispone de 14 entradas activas a 24V, 10 salidas, capacidad para almacenar aproximadamente 2000 instrucciones y 4Kb de memoria de datos. El aspecto del mismo es el que sigue:
Las salidas del autómata son del tipo relé. Así, al activarse una salida lo que hace el autómata es
activar el relé correspondiente, dejando este pasar la corriente desde el común del bloque de salidas hacia la salida que queramos activar. De esta manera podemos conectar cualquier otro elemento que quisiéramos controlar entre el neutro y una salida del autómata. Conectando la fase al común de las salidas y activando la salida que corresponde al elemento haría e el relé cerraría el circuito y se accionaría el elemento conectado.
La corriente que puede dejar pasar el relé no es demasiado grande, si necesitáramos controlar un proceso que consumiera mucha corriente no podríamos hacerlo directamente. Para hacerlo deberíamos hacer que la salida activara un contactor (éste consume poca potencia) y éste a su vez activara el proceso.
El autómata no sólo dispone de un común a todas las salidas, sino que existen comunes por bloques con lo que podemos controlar procesos que se alimenten a diferentes voltajes.
Para programar el autómata en las prácticas utilizaremos el programa Step7-MICRO/WIN. Con objeto de transferir el programa desarrollado al autómata y probarlo será necesario conectarlo al ordenador mediante el puerto serie, haciendo uso del cable proporcionado.
Step7-MICRO/WIN es un programa de Siemens Energy & Automation que nos permite programar los autómatas de la familia S7 (con CPU‟s 212, 214, 215, 216). Este software permite la programación del S7 de dos maneras:
a) Programación KOP. Este tipo de programación permite la definición del funcionamiento del autómata de una manera visual. Así, el programa obtenido siguiendo este método tendrá apariencia de circuito. En este habrá dos elementos importantes: los contactos y las bobinas. Los contactos son los elementos que representan una entrada del autómata; cuando ésta se active se cerrará en contacto y fluirá la corriente por él. Las bobinas representan las salidas del autómata de manera que cuando llegue corriente hacia una de ellas, se activará la salida correspondiente.
Además de estos elementos existen otros (que comentaremos más adelante) que nos sirven para conectar las bobinas y los conectores de manera que podamos generar programas tan complejos como queramos.
b) Programación AWL. Mediante este tipo de programación no visual, podemos generar
programas de la forma que lo hacemos con cualquier lenguaje de programación, todo programa KOP tiene su correspondiente en AWL y viceversa.
En los siguientes párrafos se muestra una pequeña introducción del método de programación KOP
que es el que hemos utilizaremos en las prácticas.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
8
Primeros Pasos con STEP7-MICRO/WIN
Creación de un programa mediante el lenguaje KOP
Cuando se activa el programa, por defecto, se crea un proyecto sin nombre. No obstante, también se puede crear un nuevo proyecto pulsando sobre Proyecto->Nuevo (esta será la notación para referirnos al
menú Proyecto, opción Nuevo) o bien sobre el icono situado sobre la barra de herramientas. Una vez cree el proyecto se abrirá automáticamente la ventana del editor KOP. La interfaz del
programa tendrá el siguiente aspecto:
Para seleccionar un componente que se desee incluir en el esquema de contactos se puede utilizar las listas de elementos de la parte superior izquierda.
También es posible introducir un elemento operando con el ratón en la ventana de la izquierda. Si se abre la carpeta operaciones se muestran distintas subcarpetas con los grupos de elementos
que se pueden introducir en un programa KOP. Abriendo cada una de las carpetas aparecen los símbolos de los elementos. Basta seleccionarlos con el ratón para que se incorporen al programa.
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
9
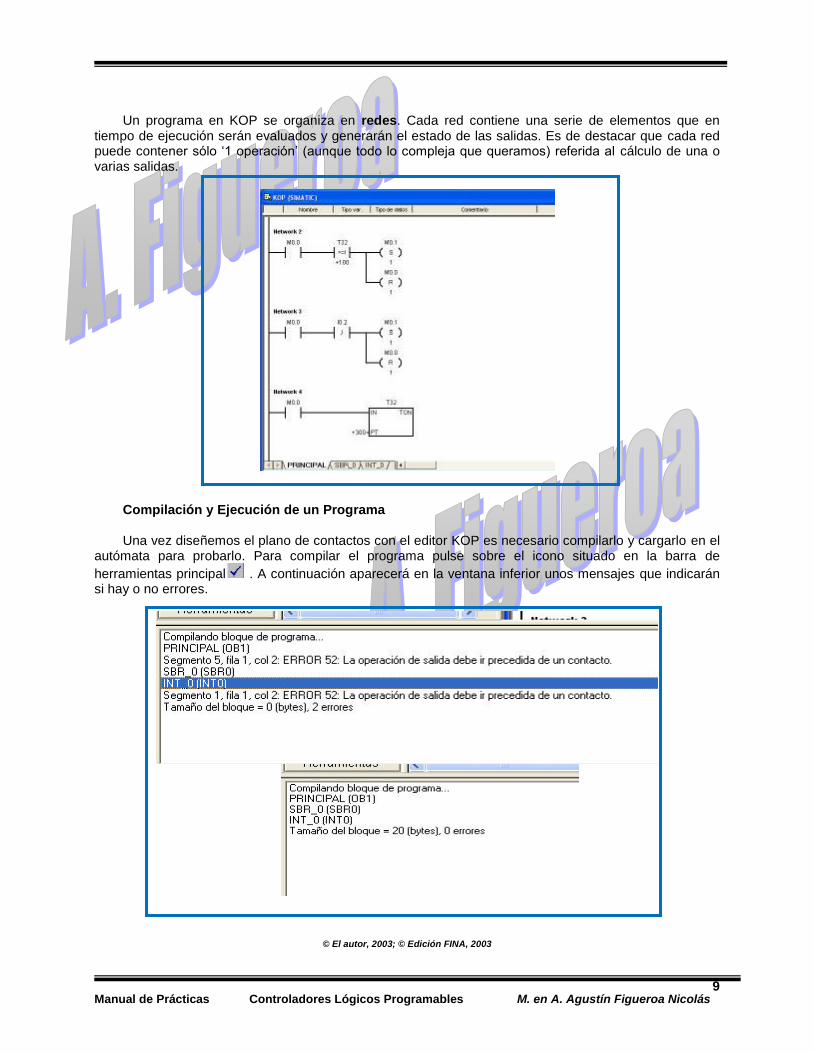
Un programa en KOP se organiza en redes. Cada red contiene una serie de elementos que en tiempo de ejecución serán evaluados y generarán el estado de las salidas. Es de destacar que cada red puede contener sólo „1 operación‟ (aunque todo lo compleja que queramos) referida al cálculo de una o varias salidas.
Compilación y Ejecución de un Programa
Una vez diseñemos el plano de contactos con el editor KOP es necesario compilarlo y cargarlo en el
autómata para probarlo. Para compilar el programa pulse sobre el icono situado en la barra de
herramientas principal . A continuación aparecerá en la ventana inferior unos mensajes que indicarán si hay o no errores.
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
10
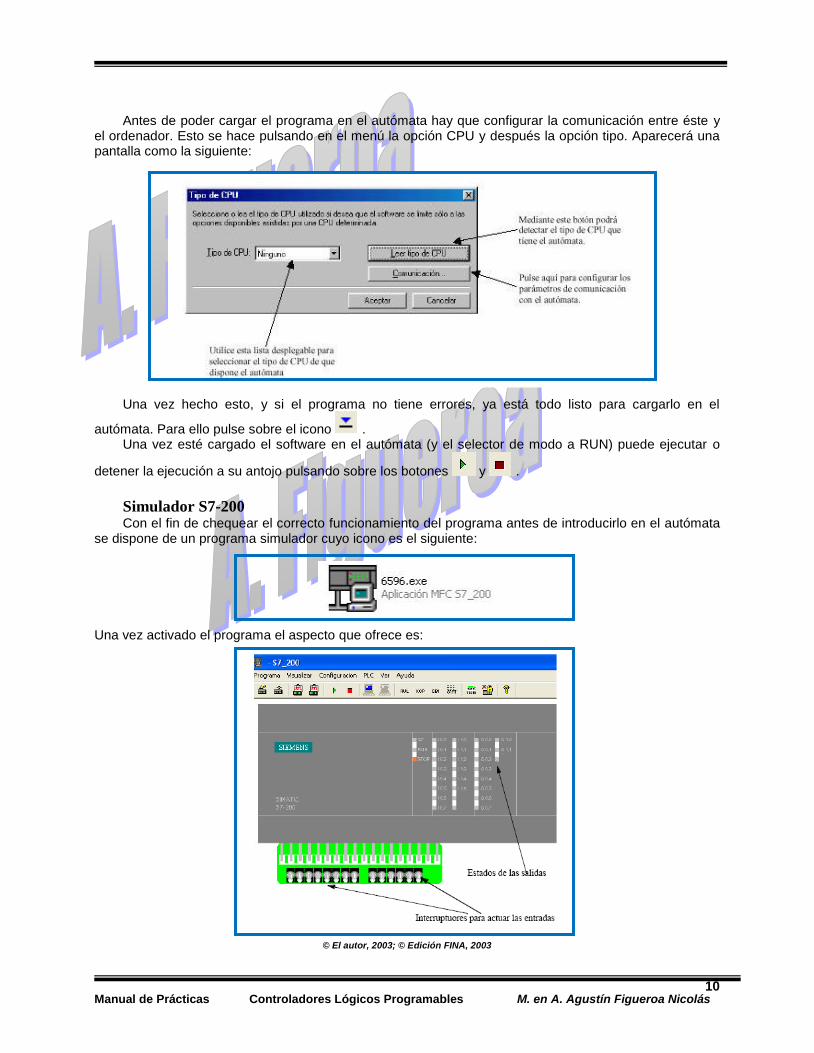
Antes de poder cargar el programa en el autómata hay que configurar la comunicación entre éste y el ordenador. Esto se hace pulsando en el menú la opción CPU y después la opción tipo. Aparecerá una pantalla como la siguiente:
Una vez hecho esto, y si el programa no tiene errores, ya está todo listo para cargarlo en el
autómata. Para ello pulse sobre el icono . Una vez esté cargado el software en el autómata (y el selector de modo a RUN) puede ejecutar o
detener la ejecución a su antojo pulsando sobre los botones y .
Simulador S7-200 Con el fin de chequear el correcto funcionamiento del programa antes de introducirlo en el autómata
se dispone de un programa simulador cuyo icono es el siguiente:
Una vez activado el programa el aspecto que ofrece es:
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
11
El simulador nos ofrece la posibilidad de cambiar el estado de las entradas De off a on y viceversa con solo actuar con el ratón sobre los interruptores que se encuentran en la parte inferior de la pantalla. Pr otra parte permite visualizar el estado de la salida mediante unas indicaciones luminosas que aparecen sobre el dibujo del PLC. Si la indicación luce, la salida está en on y si no luce la salida está en off.
Para cargar un programa en el simulador, primero hay que escribir el programa en lenguaje awl.
Ésto lo hace MICRO/WIN automáticamente. Basta con escoger en el menú la opción Archivo, y después la opción exportar. El programa pedirá el nombre del archivo y donde quiere guardarse.
Finalmente el fichero *.awl se cargará en el simulador. Para poder probarlo bastará con actuar sobre
la opción Run DEL SIMULADOR .
© El autor, 2003; © Edición FINA, 2003
opción Run

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
12
Operaciones con Temporizadores.
Dentro de la temporización hemos de diferenciar entre tres tipos de “relojes”:
Temporizador de retardo a la conexión (TON). Temporizador de retardo a la conexión memorizado (TONR). Temporizador de retardo a la desconexión (TOF).
Las operaciones temporizador de retardo a la conexión y temporizador de retardo a la
conexión memorizado cuentan el tiempo al estar activada (ON) la entrada de habilitación. Si el valor actual (Txxx) es mayor o igual al valor de preselección (PT), se activa el bit de temporización (bit T). Cuando la entrada de habilitación está desconectada (OFF), el valor actual se borra en el caso del temporizador de retardo a la conexión. En cambio, se conserva en el temporizador de retardo a la conexión memorizado. Éste último sirve para acumular varios períodos de tiempo de la entrada en ON. Para borrar el valor actual del temporizador de retardo a la conexión memorizado se utiliza la operación poner a 0 (Reset).
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
13
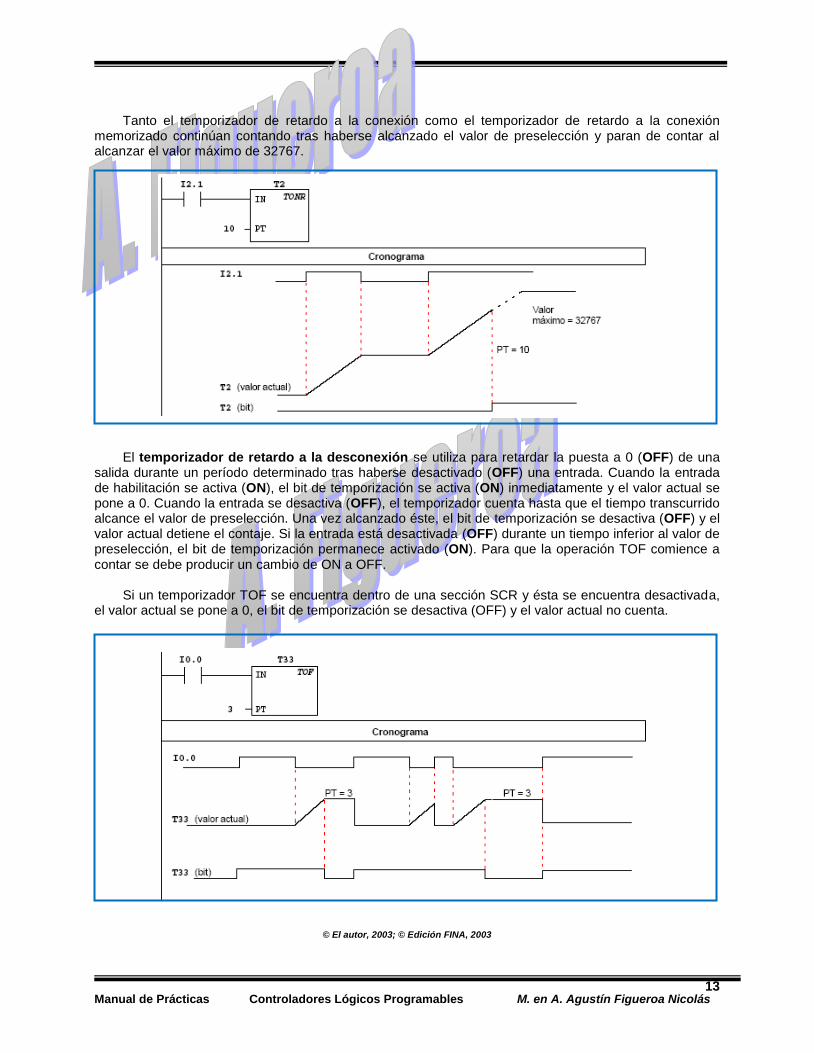
Tanto el temporizador de retardo a la conexión como el temporizador de retardo a la conexión memorizado continúan contando tras haberse alcanzado el valor de preselección y paran de contar al alcanzar el valor máximo de 32767.
El temporizador de retardo a la desconexión se utiliza para retardar la puesta a 0 (OFF) de una
salida durante un período determinado tras haberse desactivado (OFF) una entrada. Cuando la entrada de habilitación se activa (ON), el bit de temporización se activa (ON) inmediatamente y el valor actual se pone a 0. Cuando la entrada se desactiva (OFF), el temporizador cuenta hasta que el tiempo transcurrido alcance el valor de preselección. Una vez alcanzado éste, el bit de temporización se desactiva (OFF) y el valor actual detiene el contaje. Si la entrada está desactivada (OFF) durante un tiempo inferior al valor de preselección, el bit de temporización permanece activado (ON). Para que la operación TOF comience a contar se debe producir un cambio de ON a OFF.
Si un temporizador TOF se encuentra dentro de una sección SCR y ésta se encuentra desactivada, el valor actual se pone a 0, el bit de temporización se desactiva (OFF) y el valor actual no cuenta.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
14
Estos temporizadores tienen tres resoluciones. La resolución viene determinada por el número del temporizador:
Tipo Temporizador
Resolución Valor máximo Nº. Temporizador
TONR
1 ms 32'767 s (0'546 min) T0, T64
10 ms 327'67 s (0'546 min) T1 a T4, T65 a T68
100 ms 3276'7 s (0'546 min) T5 a T31, T69 a T95
TON, TOF
1 ms 32'767 s (0'546 min) T32, T96
10 ms 327'67 s (0'546 min) T33 a T36, T97 a T100
100 ms 3276'7 s (0'546 min) T37 a T63, T101 a T255
El valor actual resulta del valor de contaje multiplicado por la base de tiempo. Por ejemplo, el valor de contaje 50 en un temporizador de 10 ms equivale a 500 ms.
No se pueden compartir números iguales para los temporizadores TOF y TON. Por ejemplo, no
puede haber tanto un TON T32 como un TOF T32. 13.- Ejercicio “Manejo de un intermitente”
Realizar un programa que simule el funcionamiento de un intermitente. 14.- Ejercicio “Manejo de un Semáforo Simple”
Utilizando tres resoluciones distintas, elabora tres temporizadores de 5 segundos para cada tipo de temporizador.
19.- Ejercicio “Control de un Garaje”
Realizar, utilizando los bits de la entrada I 0., la secuencia de encendido y apagado de leds del coche de la popular serie de televisión “El coche fantástico”. La temporalización entre bit y bit ha de ser de 1 segundo.
Ejercicio Extra “inversor de giro”
Elaborar el esquema de fuerza y de mando de una inversión de giro.
A continuación elabora su aplicación con un autómata programable (programa y conexionado del PLC).
Entradas
I 0.0 Relé térmico
I 0.1 Pulsador de marcha I
I 0.2 Pulsador de marcha I
I 0.3 Pulsador de marcha II
Salidas
Q 0.0 Contactor giro I
Q 0.1 Contactor giro II
Q 0.3 Luz intermitente giro motor
Simula el funcionamiento de una puerta de garaje.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
15
Práctica No. 1
Introducción a los PLC y al STEP 7. Objetivos. Conocer el mundo de aplicaciones y posibilidades que brinda el PLC. Conocer cómo funciona el hardware (el PLC SIEMENS S7-200 CPU 226), sus especificaciones
técnicas y configuraciones. Familiarizarse con el software (Step7), su configuración, sus instrucciones y herramientas básicas
para inicializarse en éste. Contenido.
1. Para qué sirve el PLC. 2. Generalidades del PLC SIEMENS S7-200 CPU 226, Entradas/Salidas, alimentación. 3. Como configurar el sistema. 4. Tipos de programación y lenguajes; ventajas y desventajas. 5. Como transferir programas al PLC. 6. Herramientas básicas; contactos, bobinas, funciones lógicas básicas.
Desarrollo.
Se deberá resolver el contenido de la práctica después de haber leído la guía preliminar, la cual está anexa al principio del libro. El profesor será el encargado de guiar y verificar el proceso. Ejercicio de Iniciación.
Encendido de un motor aplicando las operaciones Lógicas AND y OR. Programa.
Realizar el Programa en FUP. Conclusiones.__________________________________ ______________________________________________ ______________________________________________ ______________________________________________ ______________________________________________ ______________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
16
Práctica No. 2
Compuertas Lógicas Digitales Básicas (AND, OR, Inversora y Negación). Objetivos.
Uso del Programa Microwin Step7 y el simulador S7-200. Polarización de una salida (LED). Elaborar un detector de señal lógica con un LED. Generación de estados lógicos para compuertas digitales. Obtención experimental de las tablas de verdad para las compuertas lógicas básicas: AND, OR
Inversora y Negación. Aplicar las compuertas lógicas digitales básicas en la simulación de Control Lógico Programable
(PLC). Desarrollo.
A continuación se describe las compuertas lógicas y sus tablas de verdad para ser utilizado en la programación de Control Lógico Programable (PLC). Para más detalles ver los diferentes tipos de programación KOP, FUP y AWL.
Ejercicio.
Encendido de operaciones con compuertas Lógicas.
La función “Y”, “AND” ó “SIMULTANEADAD”.- En esta función se activa el circuito mediante la utilización de dos botoneras, en cuya condición de trabajo para activar el circuito es mediante la activación de ambas al mismo tiempo, en caso contrario no se activara el circuito.
Tabla de Verdad “AND”
Entrada (S1) Entrada (S2) Salida (L1)
( I0.0 ) ( I0.1 ) ( Q0.0 )
0 0 0
0 1 0
1 0 0
1 1 1
Diagrama
Programación KOP Programación FUP Programación AWL
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
17
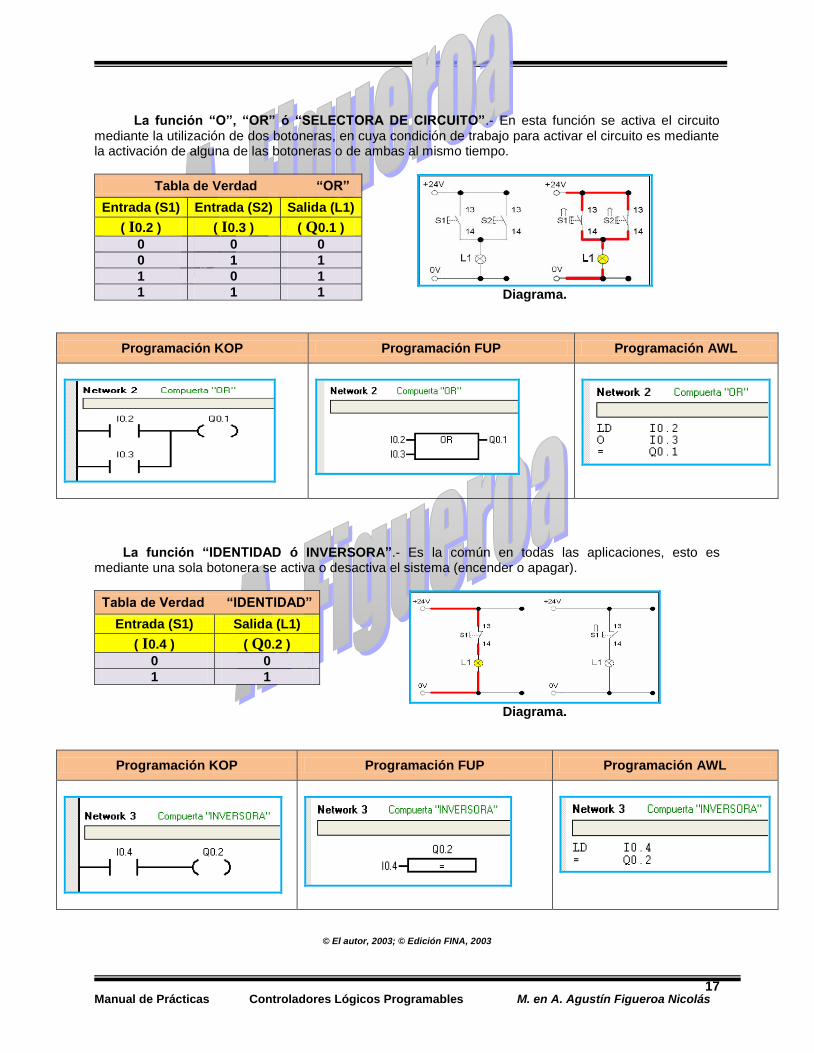
La función “O”, “OR” ó “SELECTORA DE CIRCUITO”.- En esta función se activa el circuito mediante la utilización de dos botoneras, en cuya condición de trabajo para activar el circuito es mediante la activación de alguna de las botoneras o de ambas al mismo tiempo.
Tabla de Verdad “OR”
Entrada (S1) Entrada (S2) Salida (L1)
( I0.2 ) ( I0.3 ) ( Q0.1 )
0 0 0
0 1 1
1 0 1
1 1 1
Diagrama.
Programación KOP Programación FUP Programación AWL
La función “IDENTIDAD ó INVERSORA”.- Es la común en todas las aplicaciones, esto es mediante una sola botonera se activa o desactiva el sistema (encender o apagar).
Tabla de Verdad “IDENTIDAD”
Entrada (S1) Salida (L1)
( I0.4 ) ( Q0.2 )
0 0
1 1
Diagrama.
Programación KOP Programación FUP Programación AWL
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
18
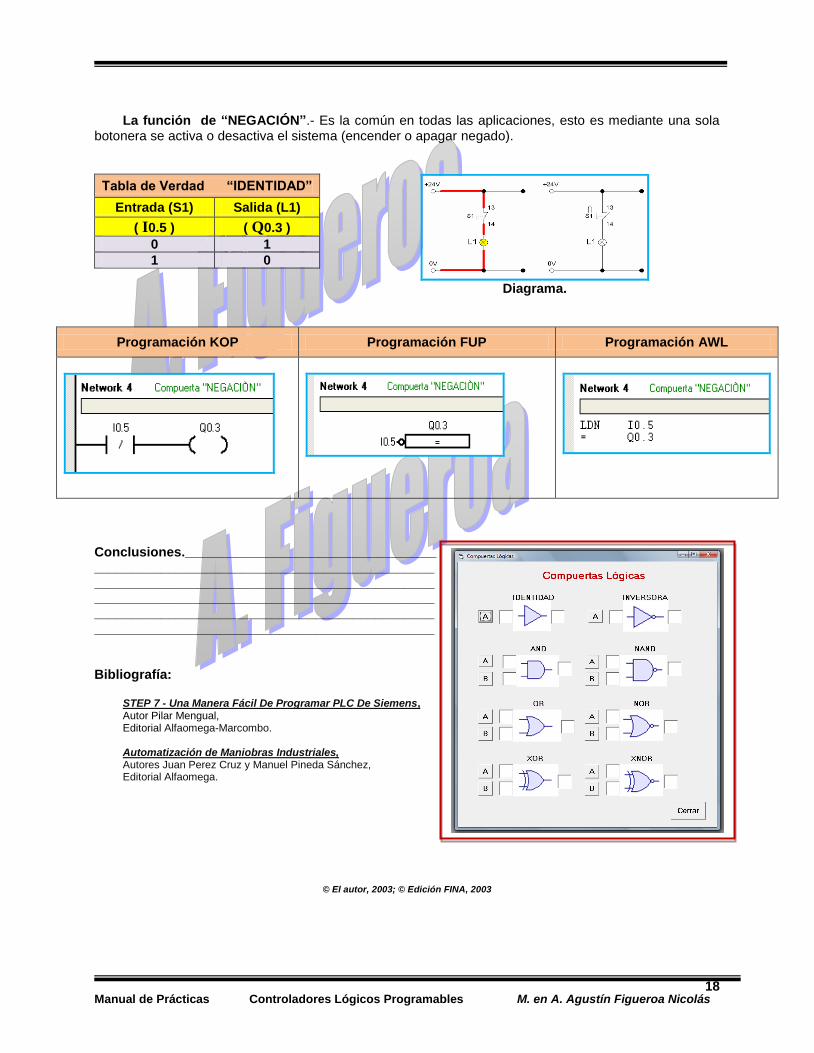
La función de “NEGACIÓN”.- Es la común en todas las aplicaciones, esto es mediante una sola botonera se activa o desactiva el sistema (encender o apagar negado).
Tabla de Verdad “IDENTIDAD”
Entrada (S1) Salida (L1)
( I0.5 ) ( Q0.3 )
0 1
1 0
Diagrama.
Programación KOP Programación FUP Programación AWL
Conclusiones.__________________________________ ______________________________________________ ______________________________________________ ______________________________________________ ______________________________________________ ______________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
19
Práctica No. 3
Compuertas Lógicas Digitales Básicas (NOR, NAND, NOR-EX y XOR). Objetivos.
Uso del Programa Microwin Step7, simulador S7-200 y el PC-Simu. Polarización de una salida (LED). Elaborar un detector de señal lógica con un LED. Generación de estados lógicos para compuertas digitales. Obtención experimental de las tablas de verdad para las compuertas lógicas básicas: NOR,
NAND, NOR-EX y XOR. Aplicar las compuertas lógicas digitales básicas en la simulación de Control Lógico Programable
(PLC). Desarrollo.
A continuación se describe las compuertas lógicas y sus tablas de verdad para ser utilizado en la programación de Control Lógico Programable (PLC). Para más detalles ver los diferentes tipos de programación KOP, FUP y AWL.
Ejercicio.
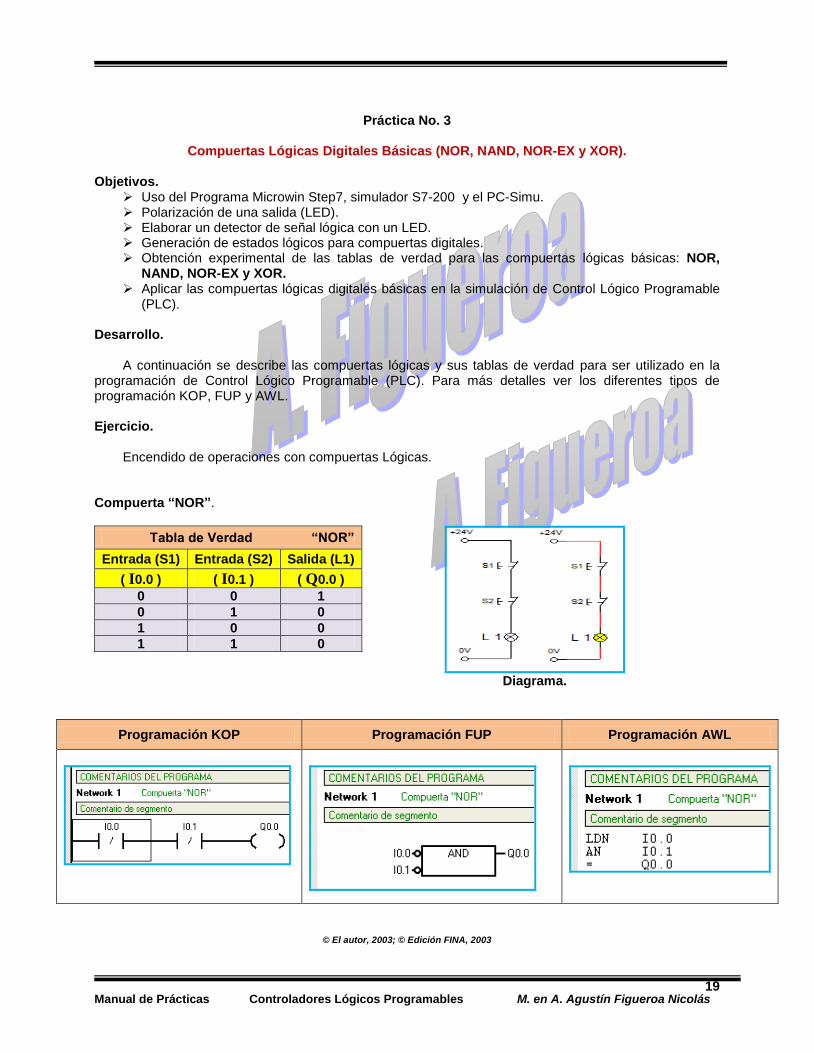
Encendido de operaciones con compuertas Lógicas. Compuerta “NOR”.
Tabla de Verdad “NOR”
Entrada (S1) Entrada (S2) Salida (L1)
( I0.0 ) ( I0.1 ) ( Q0.0 )
0 0 1
0 1 0
1 0 0
1 1 0
Diagrama.
Programación KOP Programación FUP Programación AWL
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
20
La función “NAND” es una compuerta que equivale a una compuerta AND con su salida negada. El símbolo de esta compuerta y su tabla de verdad son las siguientes:
Tabla de Verdad “NAND”
Entrada (S1) Entrada (S2) Salida (L1)
( I0.2 ) ( I0.3 ) ( Q0.1 )
0 0 1
0 1 1
1 0 1
1 1 0
Diagrama.
Programación KOP Programación FUP Programación AWL
Compuerta “NOR-EX”.
Tabla de Verdad “NOR-EX”
Entrada (S1) Entrada (S2) Salida (L1)
( I0.0 ) ( I0.1 ) ( Q0.0 )
0 0 1
0 1 0
1 0 0
1 1 1
Diagrama.
Programación KOP Programación FUP Programación AWL
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
21
Compuerta “XOR”.
Tabla de Verdad “XOR”
Entrada (S1) Entrada (S2) Salida (L1)
( I0.0 ) ( I0.1 ) ( Q0.0 )
0 0 0
0 1 1
1 0 1
1 1 0
Diagrama.
Programación KOP Programación FUP Programación AWL
Conclusiones.__________________________________ ______________________________________________ ______________________________________________ ______________________________________________ ______________________________________________ ______________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
22
Práctica No. 4
Combinaciones Digitales Básicas. Objetivos.
Uso del Programa Microwin Step7, el simulador S7-200 y el PC-Simu. Obtención experimental de las conexiones de entradas y salidas. Aplicar las diferentes conexiones de serie paralelo de combinaciones digitales básicas en la
simulación de Control Lógico Programable (PLC). Desarrollo.
A continuación se describe las combinaciones digitales básicas y diferentes conexiones para ser utilizado en la programación de Control Lógico Programable (PLC). Para más detalles ver los diferentes tipos de programación KOP, FUP y AWL.
Ejercicios:
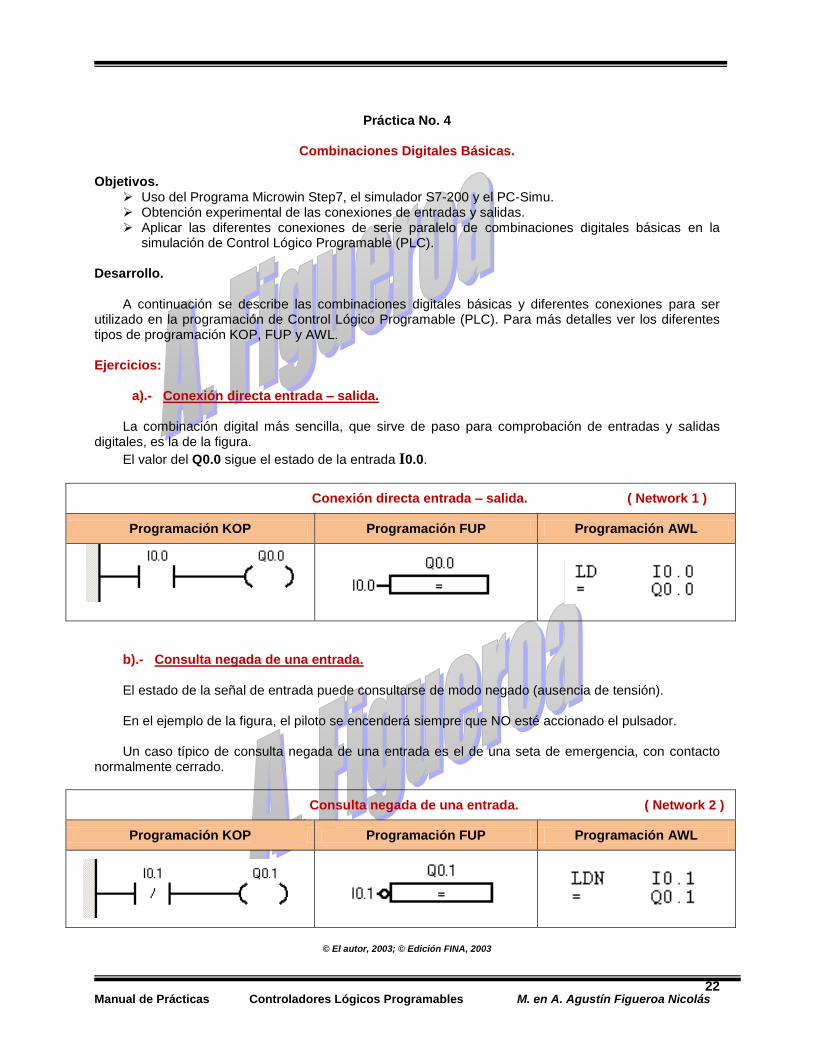
a).- Conexión directa entrada – salida.
La combinación digital más sencilla, que sirve de paso para comprobación de entradas y salidas digitales, es la de la figura.
El valor del Q0.0 sigue el estado de la entrada I0.0.
Conexión directa entrada – salida. ( Network 1 )
Programación KOP Programación FUP Programación AWL
b).- Consulta negada de una entrada. El estado de la señal de entrada puede consultarse de modo negado (ausencia de tensión). En el ejemplo de la figura, el piloto se encenderá siempre que NO esté accionado el pulsador. Un caso típico de consulta negada de una entrada es el de una seta de emergencia, con contacto
normalmente cerrado.
Consulta negada de una entrada. ( Network 2 )
Programación KOP Programación FUP Programación AWL
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
23
c).- Activación negada de la salida. El estado de la señal de entrada puede consultarse de modo negado (ausencia de tensión). En el ejemplo de la figura, el piloto no se encenderá cuando se accione el pulsador.
Activación negada de la salida. ( Network 3 )
Programación KOP Programación FUP Programación AWL
d).- Consultas y activaciones negadas.
Se pueden realizar a la vez consultas y activaciones en modo negado.
Consultas y activaciones negadas. ( Network 4 )
Programación KOP Programación FUP Programación AWL
Procedimiento.
a) Realizar la programación en el programa de Microwin Step7. b) Simular la programación con el simulador S7-200 y el PC-Simu. c) Mostrar el circuito y comprobar que cumple la operación.
Conclusiones.____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
24
Práctica No. 5
Combinaciones Digitales Básicas (Conexiones diferentes). Objetivos.
Uso del Programa Microwin Step7, el simulador S7-200 y el PC-Simu. Obtención experimental de las conexiones de entradas y salidas. Aplicar las diferentes conexiones de serie paralelo de combinaciones digitales básicas en la
simulación de Control Lógico Programable (PLC). Desarrollo.
A continuación se describe las combinaciones digitales básicas y diferentes conexiones para ser utilizado en la programación de Control Lógico Programable (PLC). Para más detalles ver los diferentes tipos de programación KOP, FUP y AWL.
Ejercicios:
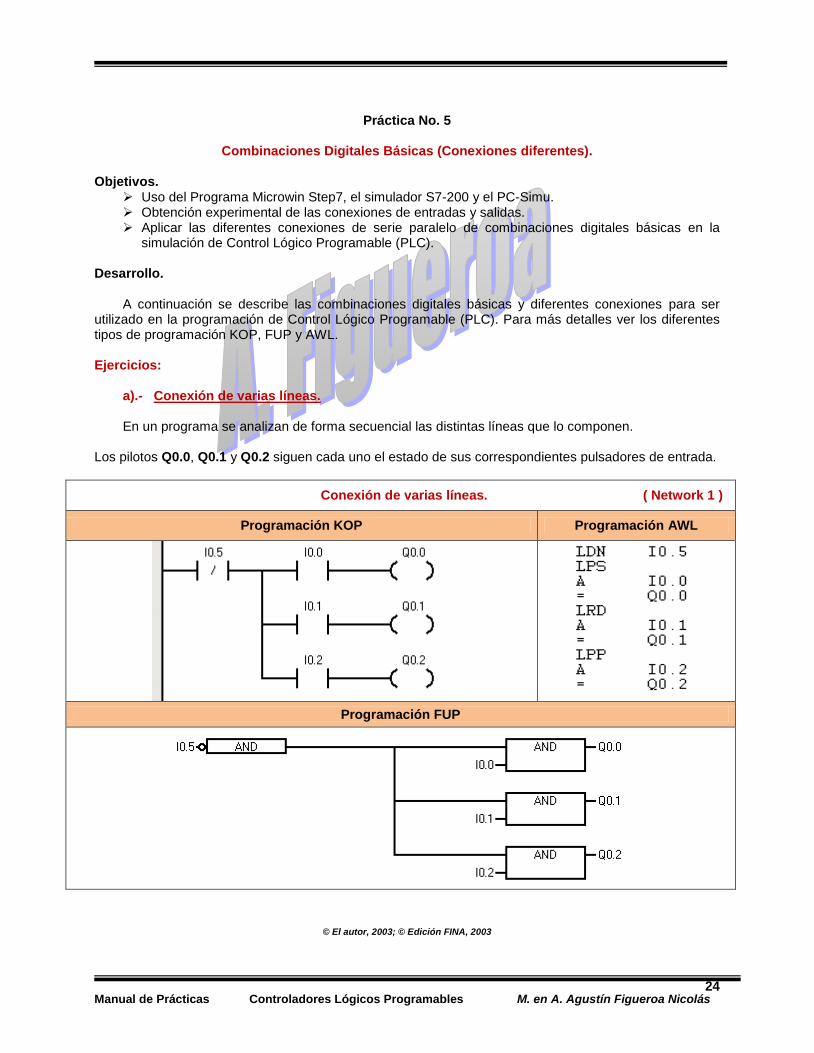
a).- Conexión de varias líneas.
En un programa se analizan de forma secuencial las distintas líneas que lo componen.
Los pilotos Q0.0, Q0.1 y Q0.2 siguen cada uno el estado de sus correspondientes pulsadores de entrada.
Conexión de varias líneas. ( Network 1 )
Programación KOP Programación AWL
Programación FUP
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
25
b).- Conexión de varias líneas con la misma salida.
NO se debe programar la misma salida en varias combinaciones digitales. SÓLO respondería a la última línea programada.
En este ejemplo, el Q0.1 sólo dependería del estado del pulsador I0.5. El resto de órdenes no
afectan a su estado.
Conexión de varias líneas con la misma salida. ( Network 2 )
Programación KOP
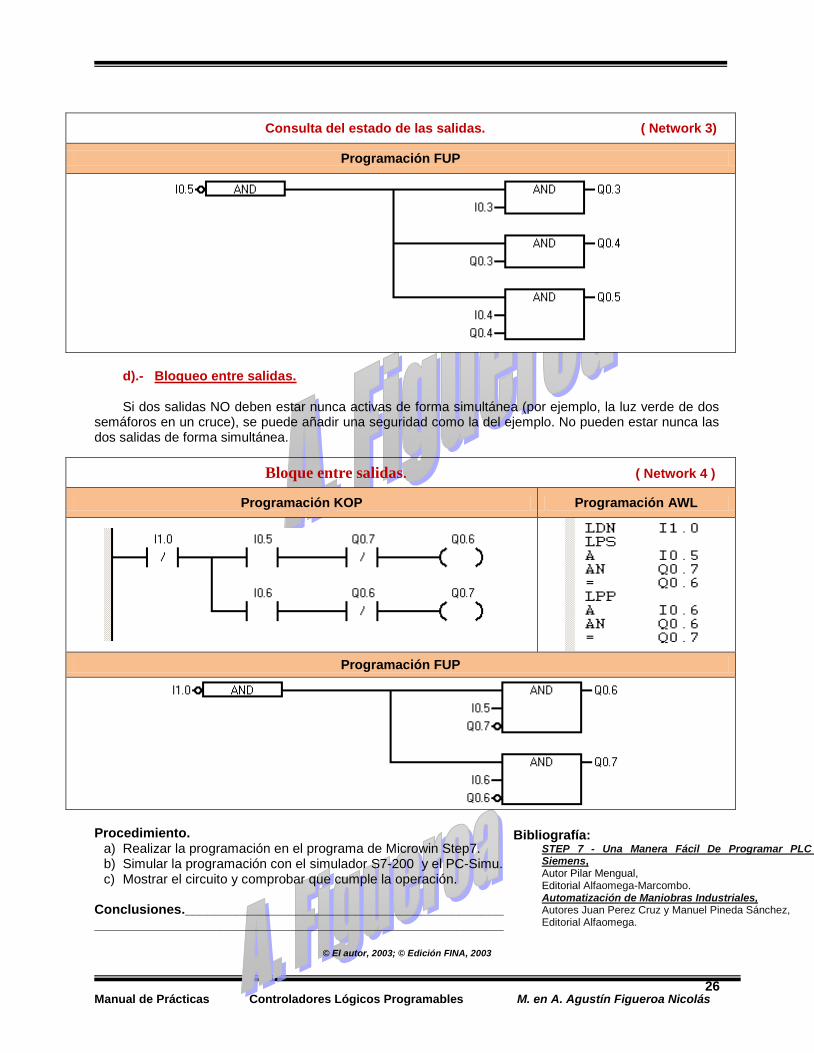
c).- Consulta del estado de las salidas. Se puede consultar no sólo el estado de una entrada, sino también el de una salida, de forma normal
o negada. En este ejemplo, el estado de los pilotos Q0.4 y Q0.5 depende a su vez del estado de otras salidas.
Consulta del estado de las salidas. ( Network 3)
Programación KOP Programación AWL
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
26
Consulta del estado de las salidas. ( Network 3)
Programación FUP
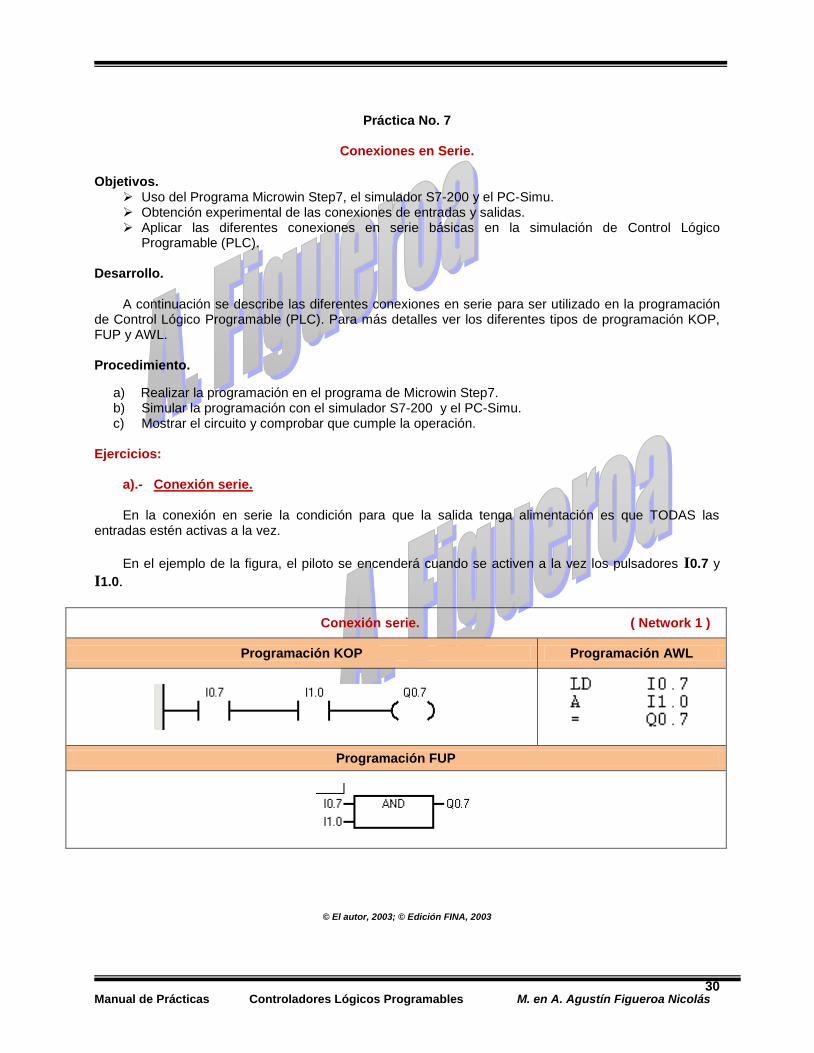
d).- Bloqueo entre salidas. Si dos salidas NO deben estar nunca activas de forma simultánea (por ejemplo, la luz verde de dos
semáforos en un cruce), se puede añadir una seguridad como la del ejemplo. No pueden estar nunca las dos salidas de forma simultánea.
Bloque entre salidas. ( Network 4 )
Programación KOP Programación AWL
Programación FUP
Procedimiento.
a) Realizar la programación en el programa de Microwin Step7. b) Simular la programación con el simulador S7-200 y el PC-Simu. c) Mostrar el circuito y comprobar que cumple la operación.
Conclusiones._________________________________________________________________________________________________________________________________
© El autor, 2003; © Edición FINA, 2003
Bibliografía: STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
27
Práctica No. 6
Conexiones en Paralelo. Objetivos.
Uso del Programa Microwin Step7, el simulador S7-200 y el PC-Simu. Obtención experimental de las conexiones de entradas y salidas. Aplicar las diferentes conexiones en paralelo básicas en la simulación de Control Lógico
Programable (PLC). Desarrollo.
A continuación se describe las diferentes conexiones en paralelo para ser utilizado en la programación de Control Lógico Programable (PLC). Para más detalles ver los diferentes tipos de programación KOP, FUP y AWL.
Procedimiento.
a) Realizar la programación en el programa de Microwin Step7. b) Simular la programación con el simulador S7-200 y el PC-Simu. c) Mostrar el circuito y comprobar que cumple la operación.
Ejercicios:
a).- Conexión de entradas en paralelo. Se puede consultar el estado simultáneo de varias entradas para activar una salida.
El piloto recibe tensión cuando está accionado el pulsador I0.0 ó I0.1.
Conexión de entradas en Paralelo. ( Network 1)
Programación KOP Programación AWL
Programación FUP
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
28
b).- Conexión de salidas en paralelo. Se pueden activar simultáneamente varias salidas.
El piloto I0.2 sigue el estado del pulsador I0.2 y el piloto I0.3 lo hace de forma negada.
Conexión de salidas en Paralelo. ( Network 2 )
Programación KOP Programación AWL
Programación FUP
c).- Conexión de entradas y salidas en paralelo. Se pueden realizar a la vez consultas de entradas en paralelo y accionar salidas en paralelo.
En este montaje cuando esté accionado el pulsador I 0.3 o no lo esté el I0.4 se activará la salida
Q0.3 y dejará de activarse la salida Q0.4.
Conexión de entradas y salidas en paralelo. ( Network 3)
Programación KOP Programación AWL
Programación FUP
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
29
d).- Conexiones serie en cascada. Se pueden activar varias salidas con ramificaciones de una misma serie.
En el ejemplo de la figura, el piloto Q0.5 se encenderá cuando se activen el pulsador I0.5. El Q0.6 lo
hará si está además pulsado el pulsador I0.6.
Conexiones serie en cascada. ( Network 4 )
Programación KOP Programación AWL
Programación FUP
Conclusiones.____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
30
Práctica No. 7
Conexiones en Serie. Objetivos.
Uso del Programa Microwin Step7, el simulador S7-200 y el PC-Simu. Obtención experimental de las conexiones de entradas y salidas. Aplicar las diferentes conexiones en serie básicas en la simulación de Control Lógico
Programable (PLC). Desarrollo.
A continuación se describe las diferentes conexiones en serie para ser utilizado en la programación de Control Lógico Programable (PLC). Para más detalles ver los diferentes tipos de programación KOP, FUP y AWL.
Procedimiento.
a) Realizar la programación en el programa de Microwin Step7. b) Simular la programación con el simulador S7-200 y el PC-Simu. c) Mostrar el circuito y comprobar que cumple la operación.
Ejercicios:
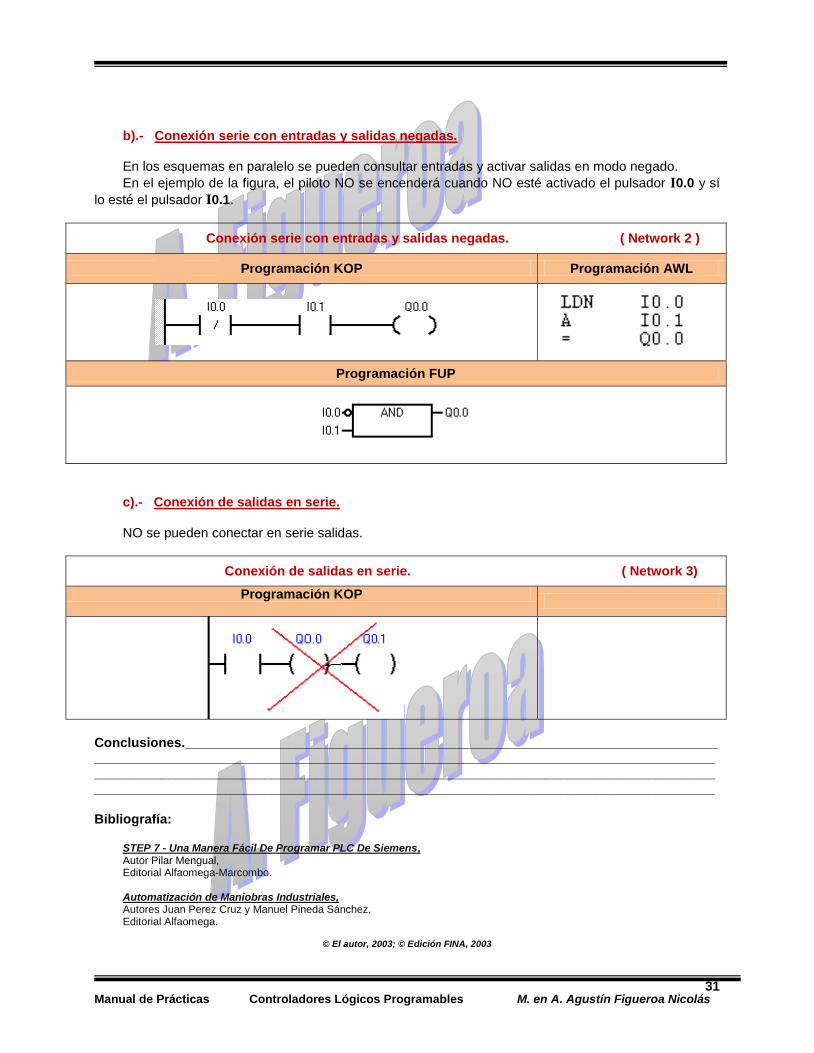
a).- Conexión serie. En la conexión en serie la condición para que la salida tenga alimentación es que TODAS las
entradas estén activas a la vez.
En el ejemplo de la figura, el piloto se encenderá cuando se activen a la vez los pulsadores I0.7 y
I1.0.
Conexión serie. ( Network 1 )
Programación KOP Programación AWL
Programación FUP
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
31
b).- Conexión serie con entradas y salidas negadas. En los esquemas en paralelo se pueden consultar entradas y activar salidas en modo negado.
En el ejemplo de la figura, el piloto NO se encenderá cuando NO esté activado el pulsador I0.0 y sí
lo esté el pulsador I0.1.
Conexión serie con entradas y salidas negadas. ( Network 2 )
Programación KOP Programación AWL
Programación FUP
c).- Conexión de salidas en serie. NO se pueden conectar en serie salidas.
Conexión de salidas en serie. ( Network 3)
Programación KOP
Conclusiones.____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
32
Práctica No. 8
Conexiones en Serie y Paralelo. Objetivos.
Uso del Programa Microwin Step7, el simulador S7-200 y el PC-Simu. Obtención experimental de las conexiones de entradas y salidas. Aplicar las diferentes conexiones en serie y paralelo básicas en la simulación de Control Lógico
Programable (PLC). Desarrollo.
A continuación se describe las diferentes conexiones en serie y paralelo para ser utilizado en la programación de Control Lógico Programable (PLC). Para más detalles ver los diferentes tipos de programación KOP, FUP y AWL.
Ejercicios:
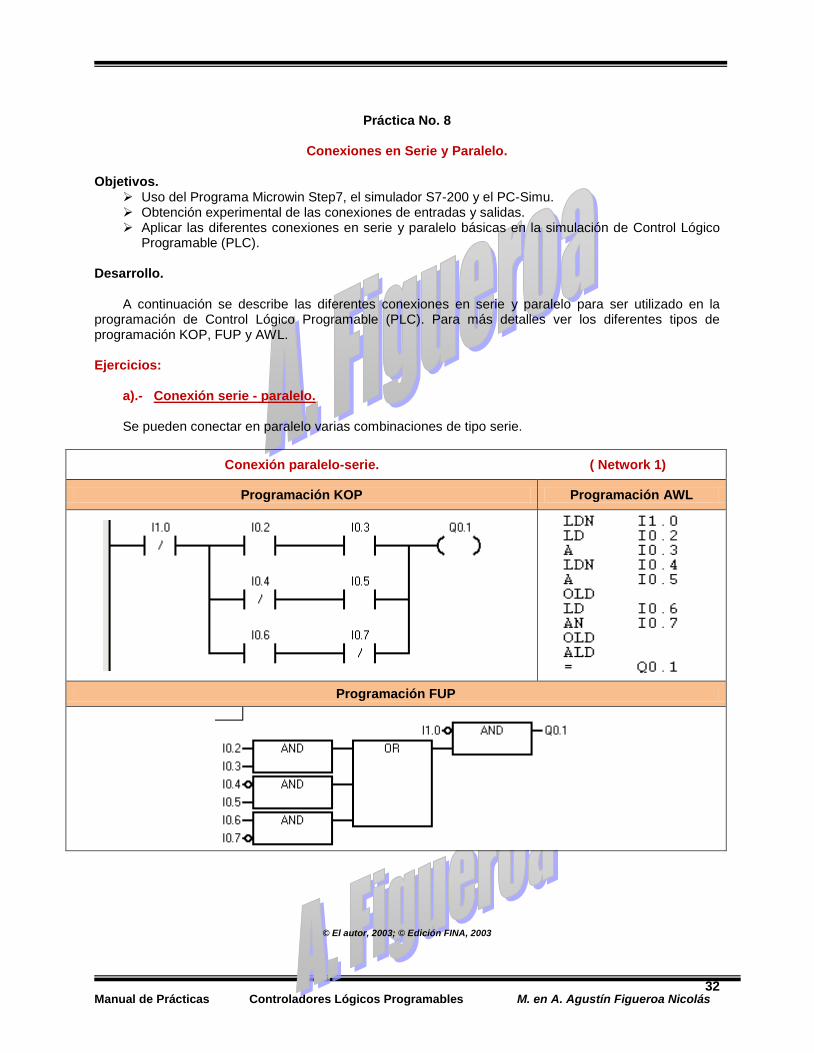
a).- Conexión serie - paralelo.
Se pueden conectar en paralelo varias combinaciones de tipo serie.
Conexión paralelo-serie. ( Network 1)
Programación KOP Programación AWL
Programación FUP
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
33
b).- Conexión serie-paralelo. Se pueden conectar en serie varias combinaciones de tipo paralelo.
Conexión serie - paralelo. ( Network 2 )
Programación KOP Programación AWL
Programación FUP
c).- Auto retención. Alimentando la salida en paralelo con su propio estado se consigue mantenerlo aunque desaparezca
la entrada del pulsador. Para poder apagar la salida es necesario conectar en serie otra entrada de reset.
En el ejemplo, el Q0.1 se enciende con el pulsador I0.4, y permanece encendido, aunque
desaparezca I0.4, hasta que se apaga con el pulsador I0.5.
Auto retención. ( Network 3 )
Programación KOP Programación AWL
Programación FUP
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
34
Procedimiento.
a) Realizar la programación en el programa de Microwin Step7. b) Simular la programación con el simulador S7-200 y el PC-Simu. c) Mostrar el circuito y comprobar que cumple la operación.
Limitaciones en montajes elementales. Cada marca y/o modelo de PLC, tiene una serie de limitaciones a la hora de Programar esquemas
de tipo serie paralelo en lógica de relés. Así, se conocen PLCs que so permiten encadenar en serie de más de 7 elementos (contactos
abierto/cerrados), otros permiten algunos elementos más, pero tienen deficiencias a la hora de colocar en paralelo muchas ramas, etc. (Nos remitiremos en cada caso al manual de usuario del PLC empleado).
Pero de forma general hay una serie de maniobras que no se deben programar en la realización de
diseños, como se ha indicado en el apartado anterior. Una de las más usuales es pretender activar de modo permanente una salida, por ejemplo un piloto indicador del funcionamiento del autómata. Conclusiones.____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
35
Práctica No.9
Circuito de Control de Entradas / Salidas y Conversión de Código Binario a Octal. Objetivos.
Que el alumno compruebe el funcionamiento de un codificador Binario a Octal. Uso del Programa Microwin Step7, el simulador S7-200 y el PC-Simu. Obtención experimental de las conexiones de entradas y salidas. Aplicar la conversión de código Binario a Octal en la simulación de Control Lógico Programable
(PLC). Desarrollo.
Se plantea el diseño de un circuito digital para incorporar al panel de control de un automóvil de manera que al abrir las puertas del vehículo se encienda un Led mostrando la puerta o puertas abiertas y además visualice en un Display de 7 segmentos un número asignado a la misma, el esquema quedaría como se muestra en la Figura 1.
Figura 1.
La resolución del circuito en electrónica sería la siguiente:
Figura 2.
Se parte de que los pulsadores de las puertas se cierran a tierra al abrirlas. También será necesario adaptar a 5 voltios los 12 voltios que proporciona la batería de un automóvil, o se podría optar por resolver el circuito con integrados de la familia CMOS para este caso se tiene que resolver el problema en la programación KOP, AWL y FUP.
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
36
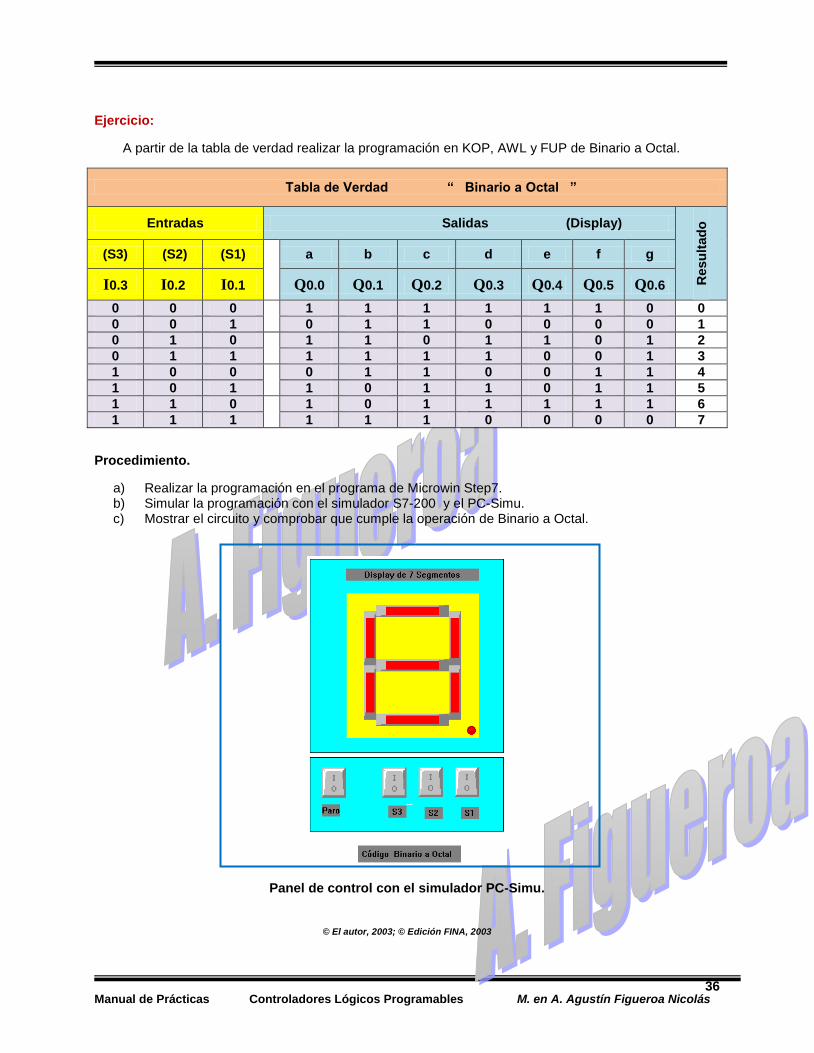
Ejercicio:
A partir de la tabla de verdad realizar la programación en KOP, AWL y FUP de Binario a Octal.
Tabla de Verdad “ Binario a Octal ”
Entradas Salidas (Display)
Resu
ltad
o
(S3) (S2) (S1)
a b c d e f g
I0.3 I0.2 I0.1 Q0.0 Q0.1 Q0.2 Q0.3 Q0.4 Q0.5 Q0.6
0 0 0 1 1 1 1 1 1 0 0
0 0 1 0 1 1 0 0 0 0 1
0 1 0 1 1 0 1 1 0 1 2
0 1 1 1 1 1 1 0 0 1 3
1 0 0 0 1 1 0 0 1 1 4
1 0 1 1 0 1 1 0 1 1 5
1 1 0 1 0 1 1 1 1 1 6
1 1 1 1 1 1 0 0 0 0 7
Procedimiento.
a) Realizar la programación en el programa de Microwin Step7. b) Simular la programación con el simulador S7-200 y el PC-Simu. c) Mostrar el circuito y comprobar que cumple la operación de Binario a Octal.
Panel de control con el simulador PC-Simu.
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
37
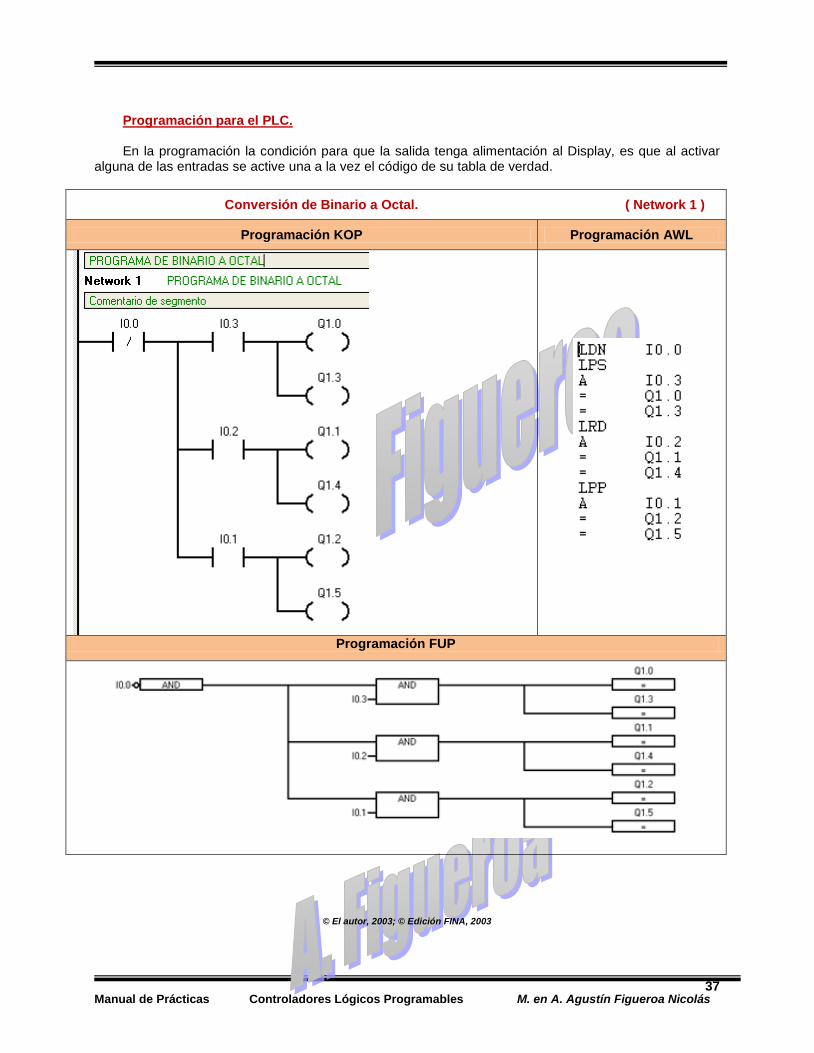
Programación para el PLC. En la programación la condición para que la salida tenga alimentación al Display, es que al activar
alguna de las entradas se active una a la vez el código de su tabla de verdad.
Conversión de Binario a Octal. ( Network 1 )
Programación KOP Programación AWL
Programación FUP
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
38
Conversión de Binario a Octal. ( Network 2 )
Programación KOP Programación AWL
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
39
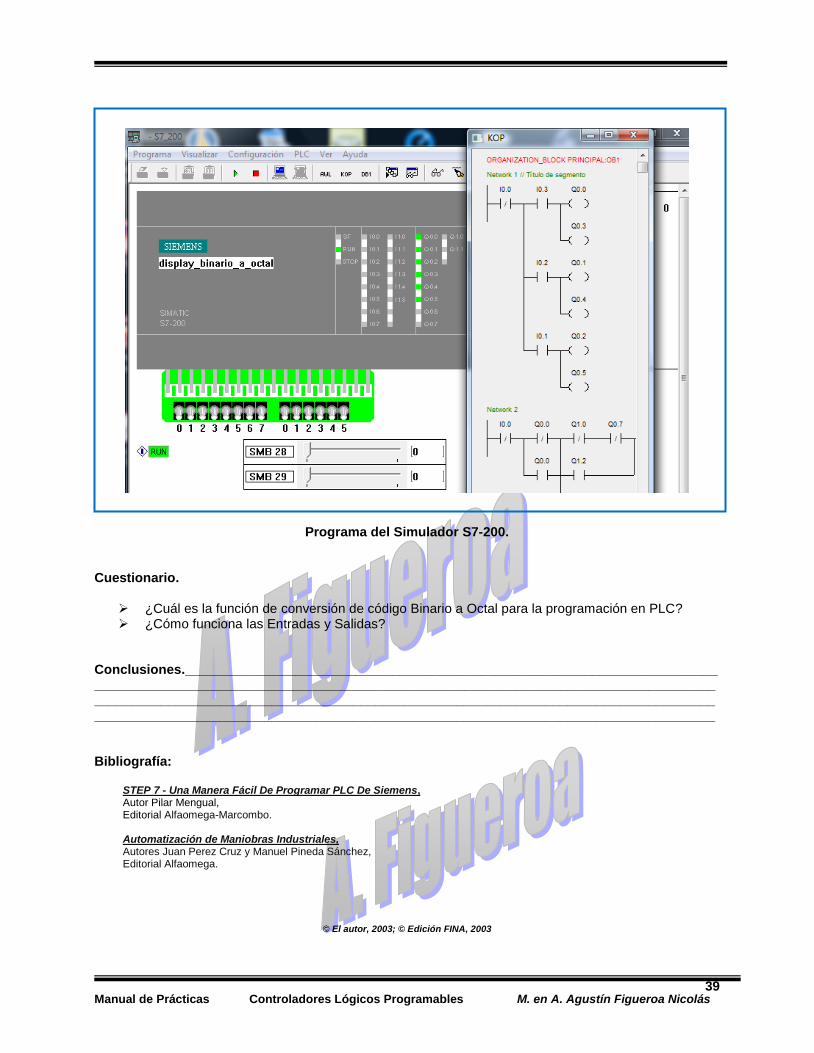
Programa del Simulador S7-200. Cuestionario. ¿Cuál es la función de conversión de código Binario a Octal para la programación en PLC? ¿Cómo funciona las Entradas y Salidas?
Conclusiones.____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
40
Práctica No.10
Manejo de decodificador Binario a Decimal. Objetivos.
Que el alumno comprenda el funcionamiento de un decodificador Binario a Decimal. Uso del Programa Microwin Step7, el simulador S7-200 y el PC-Simu. Obtención experimental de las conexiones de entradas y salidas. Aplicar un decodificador Binario a Decimal en la simulación de Control Lógico Programable
(PLC).
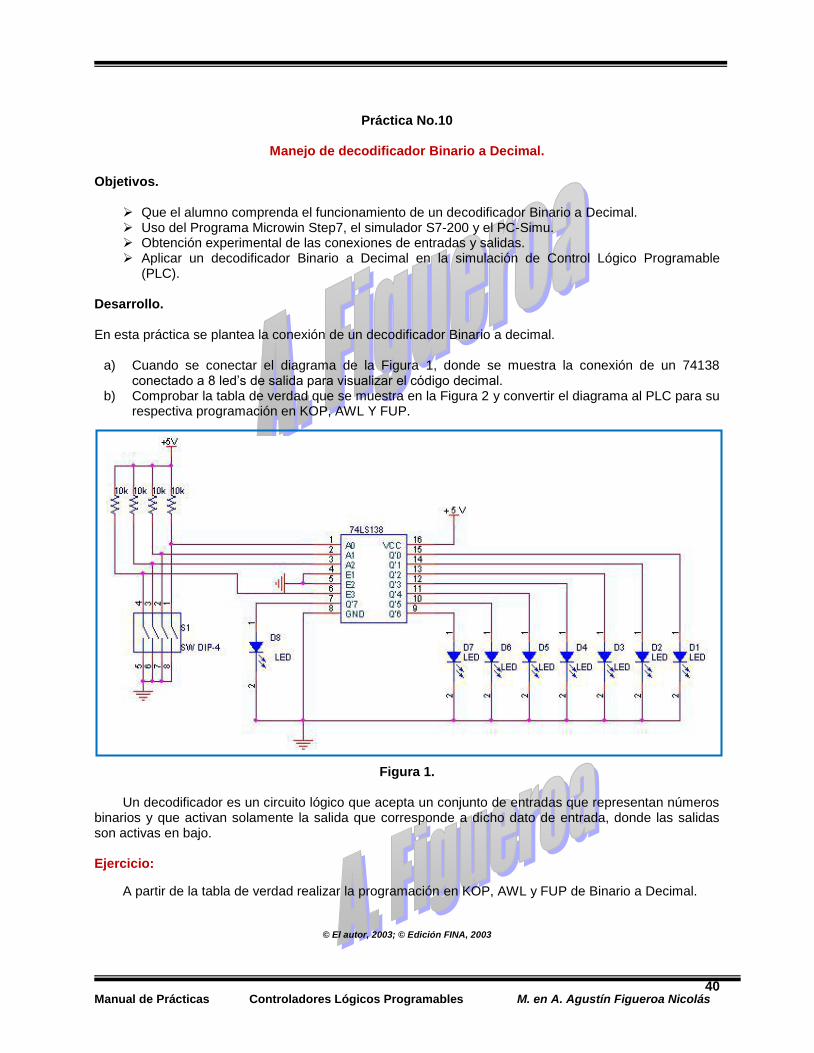
Desarrollo. En esta práctica se plantea la conexión de un decodificador Binario a decimal.
a) Cuando se conectar el diagrama de la Figura 1, donde se muestra la conexión de un 74138 conectado a 8 led‟s de salida para visualizar el código decimal.
b) Comprobar la tabla de verdad que se muestra en la Figura 2 y convertir el diagrama al PLC para su respectiva programación en KOP, AWL Y FUP.
Figura 1.
Un decodificador es un circuito lógico que acepta un conjunto de entradas que representan números binarios y que activan solamente la salida que corresponde a dicho dato de entrada, donde las salidas son activas en bajo.
Ejercicio:
A partir de la tabla de verdad realizar la programación en KOP, AWL y FUP de Binario a Decimal.
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
41
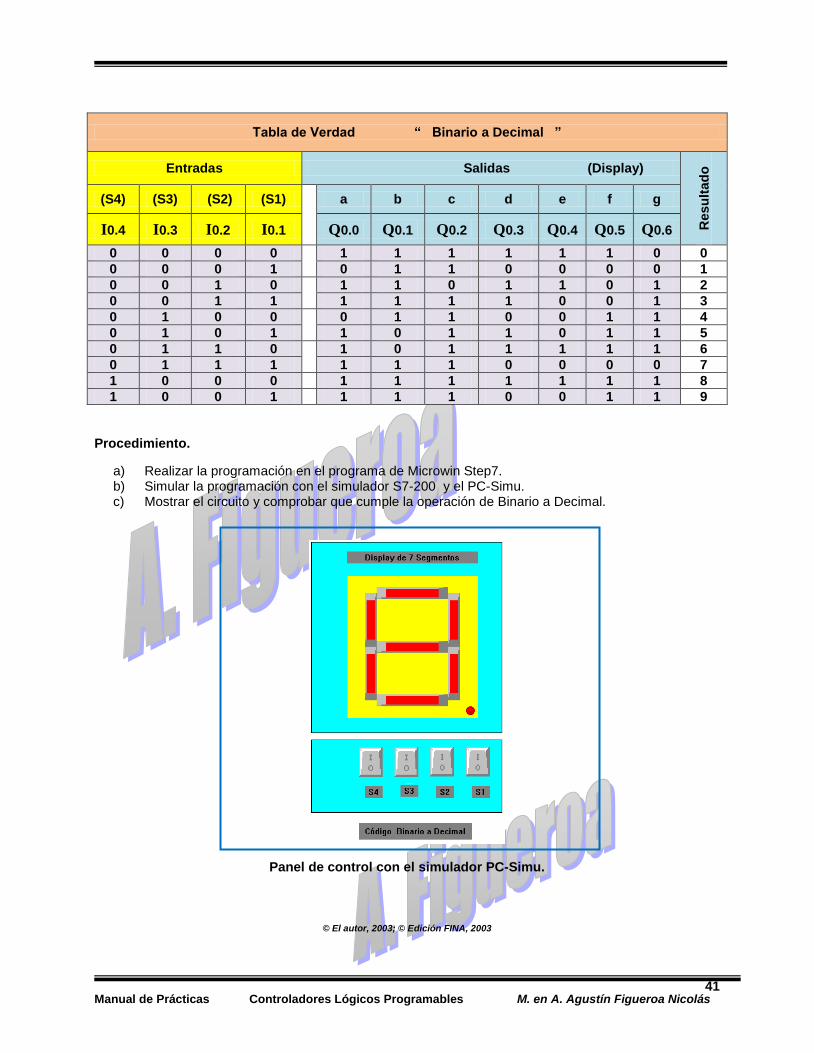
Tabla de Verdad “ Binario a Decimal ”
Entradas Salidas (Display)
Resu
ltad
o
(S4) (S3) (S2) (S1)
a b c d e f g
I0.4 I0.3 I0.2 I0.1 Q0.0 Q0.1 Q0.2 Q0.3 Q0.4 Q0.5 Q0.6
0 0 0 0 1 1 1 1 1 1 0 0
0 0 0 1 0 1 1 0 0 0 0 1
0 0 1 0 1 1 0 1 1 0 1 2
0 0 1 1 1 1 1 1 0 0 1 3
0 1 0 0 0 1 1 0 0 1 1 4
0 1 0 1 1 0 1 1 0 1 1 5
0 1 1 0 1 0 1 1 1 1 1 6
0 1 1 1 1 1 1 0 0 0 0 7
1 0 0 0 1 1 1 1 1 1 1 8
1 0 0 1 1 1 1 0 0 1 1 9
Procedimiento.
a) Realizar la programación en el programa de Microwin Step7. b) Simular la programación con el simulador S7-200 y el PC-Simu. c) Mostrar el circuito y comprobar que cumple la operación de Binario a Decimal.
Panel de control con el simulador PC-Simu.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
42
Programación para el PLC. En la programación la condición para que la salida tenga alimentación al Display, es que al activar
alguna de las entradas se active una a la vez el código de su tabla de verdad como resultado un decimal.
Conversión de Binario a Decimal. ( Network 1 )
Programación KOP Programación AWL
Programación FUP
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
43
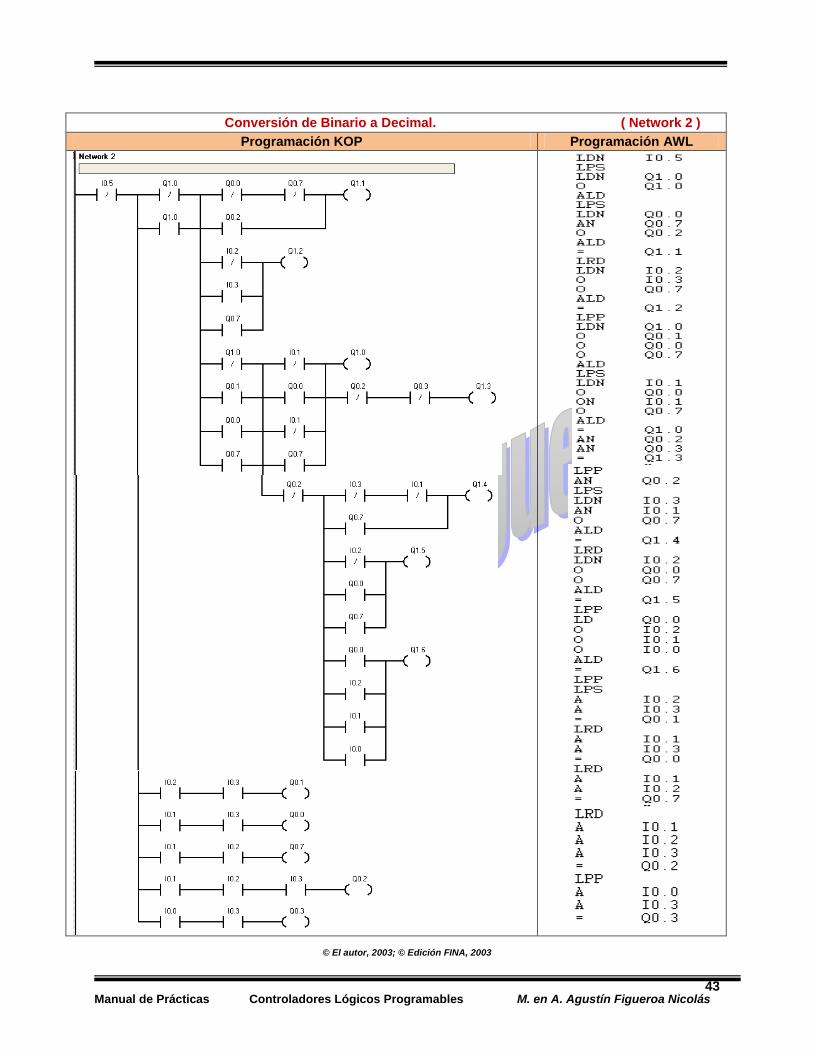
Conversión de Binario a Decimal. ( Network 2 )
Programación KOP Programación AWL
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
44
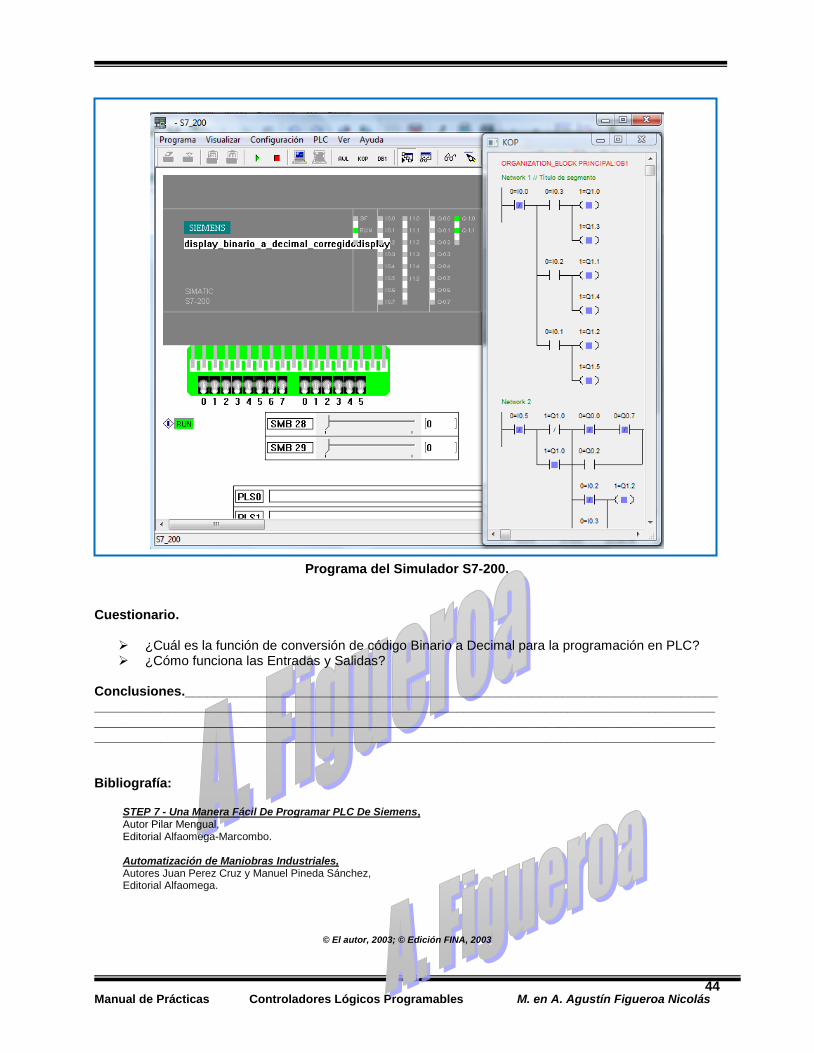
Programa del Simulador S7-200. Cuestionario. ¿Cuál es la función de conversión de código Binario a Decimal para la programación en PLC? ¿Cómo funciona las Entradas y Salidas?
Conclusiones.____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
45
Práctica No.11
Manejo de conversión Binario a Hexadecimal. Objetivos.
Que el alumno comprenda el manejo de conversión Binario a Hexadecimal. Uso del Programa Microwin Step7, el simulador S7-200 y el PC-Simu. Obtención experimental de las conexiones de entradas y salidas a Hexadecimal. Aplicar la conversión Binario a Hexadecimal en la simulación de Control Lógico Programable
(PLC).
Desarrollo.
En esta práctica se plantea la conexión de conversión Binario a Hexadecimal.
Tabla de Verdad “ Binario a Hexadecimal ”
Entradas Salidas (Display)
Resu
ltad
o
(S4) (S3) (S2) (S1)
a b c d e f g
I0.4 I0.3 I0.2 I0.1 Q0.0 Q0.1 Q0.2 Q0.3 Q0.4 Q0.5 Q0.6
0 0 0 0 1 1 1 1 1 1 0 0
0 0 0 1 0 1 1 0 0 0 0 1
0 0 1 0 1 1 0 1 1 0 1 2
0 0 1 1 1 1 1 1 0 0 1 3
0 1 0 0 0 1 1 0 0 1 1 4
0 1 0 1 1 0 1 1 0 1 1 5
0 1 1 0 1 0 1 1 1 1 1 6
0 1 1 1 1 1 1 0 0 0 0 7
1 0 0 0 1 1 1 1 1 1 1 8
1 0 0 1 1 1 1 0 0 1 1 9
1 0 1 0 1 1 1 0 1 1 1 A
1 0 1 1 1 1 1 1 1 1 1 B
1 1 0 0 1 0 0 1 1 1 0 C
1 1 0 1 1 1 1 1 1 1 0 D
1 1 1 0 1 0 0 1 1 1 1 E
1 1 1 1 1 0 0 0 1 1 1 F
Procedimiento.
a) Realizar la programación en el programa de Microwin Step7. b) Simular la programación con el simulador S7-200 y el PC-Simu. c) Mostrar el circuito y comprobar que cumple la operación de Binario a Hexadecimal. d) Encontrar en el programa que entradas no están bien y corregir la programación.
Cuestionario. ¿Cuál es la función de conversión de código Binario a Decimal para la programación en PLC? ¿Cómo funciona las Entradas y Salidas?
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
46
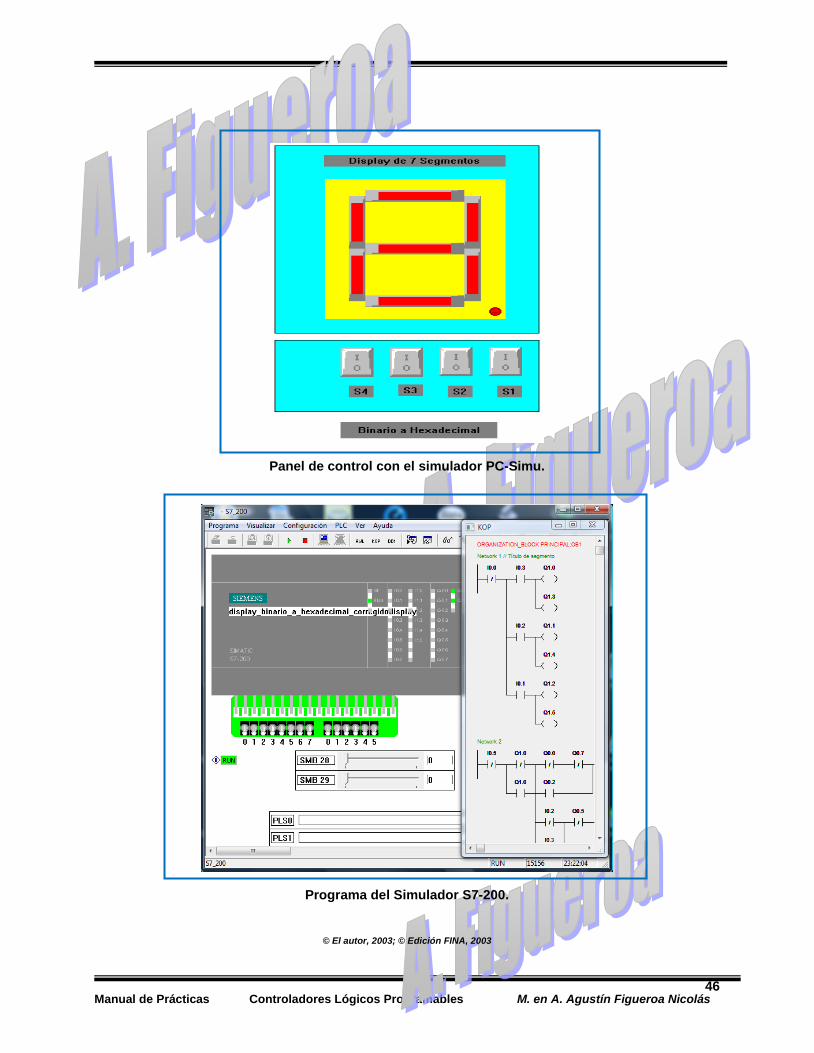
Panel de control con el simulador PC-Simu.
Programa del Simulador S7-200.
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
47
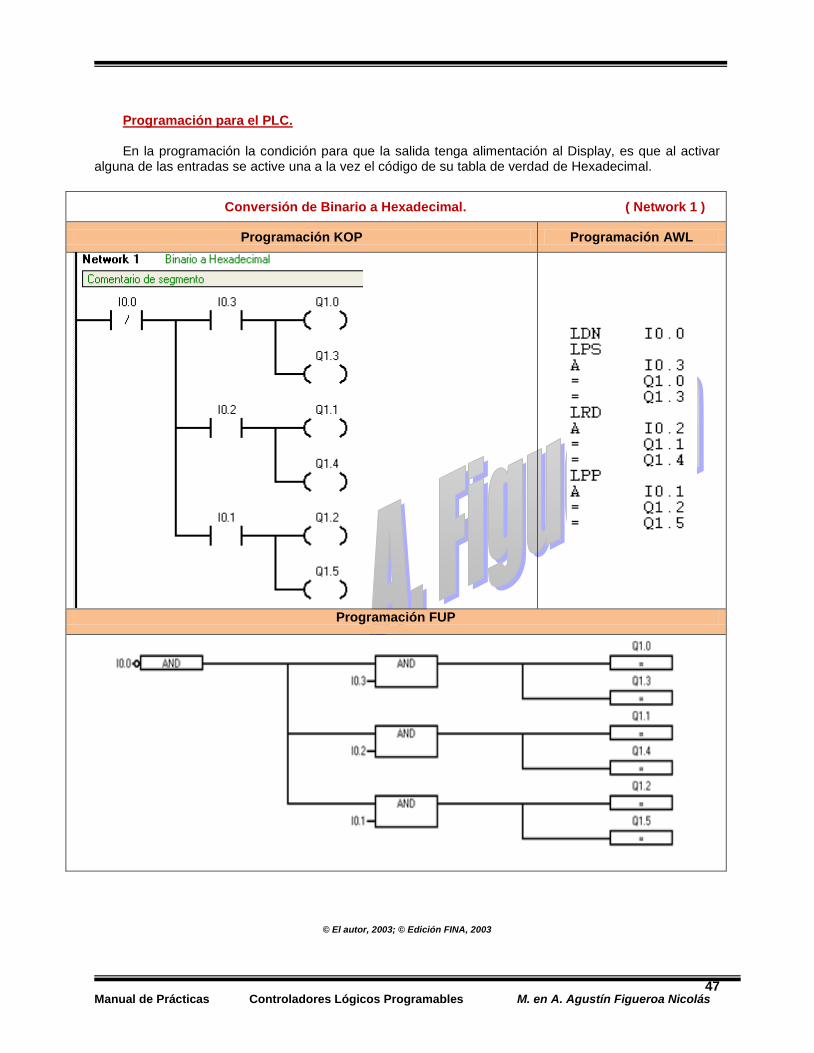
Programación para el PLC. En la programación la condición para que la salida tenga alimentación al Display, es que al activar
alguna de las entradas se active una a la vez el código de su tabla de verdad de Hexadecimal.
Conversión de Binario a Hexadecimal. ( Network 1 )
Programación KOP Programación AWL
Programación FUP
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
48
Conversión de Binario a Hexadecimal. ( Network 2 )
Programación KOP Programación AWL
© El autor, 2003; © Edición FINA, 2003
1 2 3 4
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
49
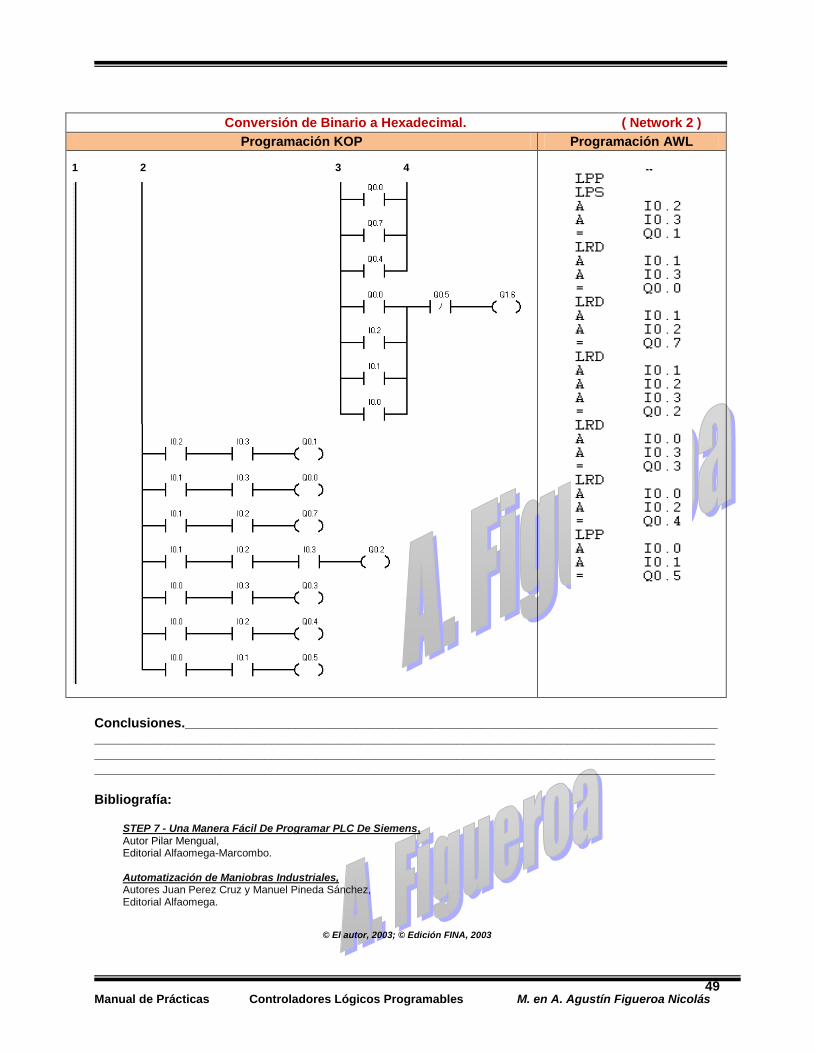
Conversión de Binario a Hexadecimal. ( Network 2 )
Programación KOP Programación AWL
Conclusiones.____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003
1 2 3 4
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
50
Práctica No.12
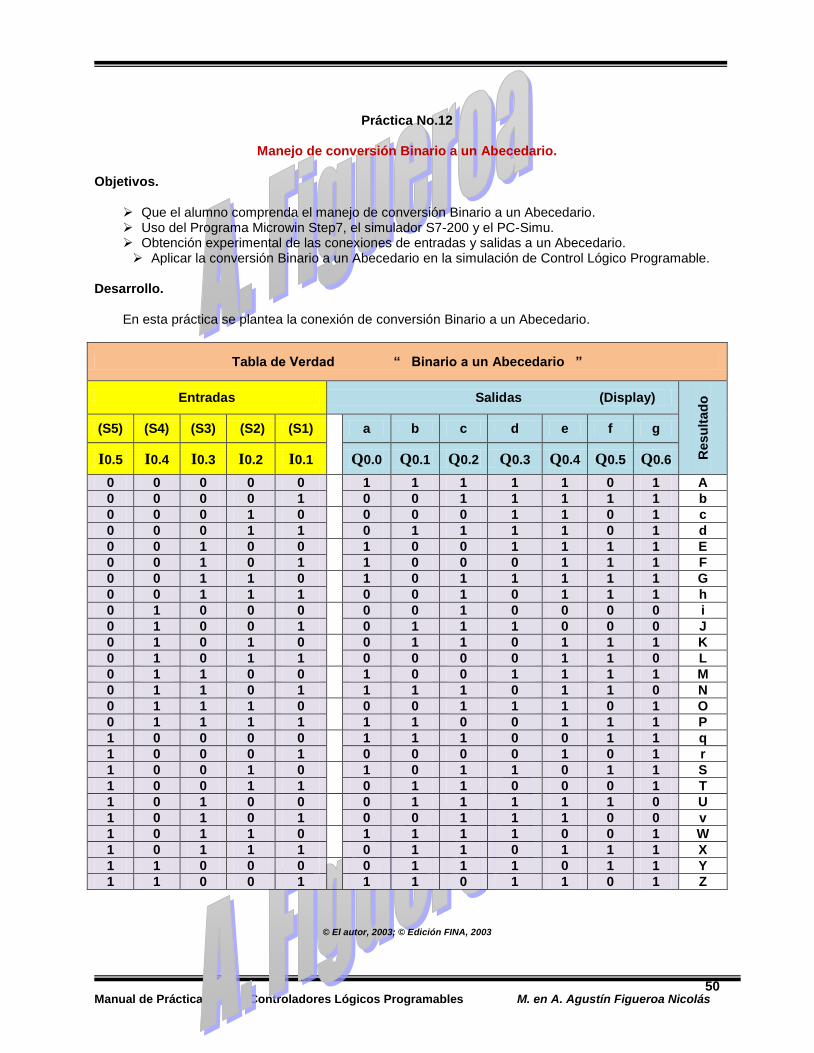
Manejo de conversión Binario a un Abecedario. Objetivos.
Que el alumno comprenda el manejo de conversión Binario a un Abecedario. Uso del Programa Microwin Step7, el simulador S7-200 y el PC-Simu. Obtención experimental de las conexiones de entradas y salidas a un Abecedario. Aplicar la conversión Binario a un Abecedario en la simulación de Control Lógico Programable.
Desarrollo.
En esta práctica se plantea la conexión de conversión Binario a un Abecedario.
Tabla de Verdad “ Binario a un Abecedario ”
Entradas Salidas (Display)
Resu
ltad
o
(S5) (S4) (S3) (S2) (S1)
a b c d e f g
I0.5 I0.4 I0.3 I0.2 I0.1 Q0.0 Q0.1 Q0.2 Q0.3 Q0.4 Q0.5 Q0.6
0 0 0 0 0 1 1 1 1 1 0 1 A
0 0 0 0 1 0 0 1 1 1 1 1 b
0 0 0 1 0 0 0 0 1 1 0 1 c
0 0 0 1 1 0 1 1 1 1 0 1 d
0 0 1 0 0 1 0 0 1 1 1 1 E
0 0 1 0 1 1 0 0 0 1 1 1 F
0 0 1 1 0 1 0 1 1 1 1 1 G
0 0 1 1 1 0 0 1 0 1 1 1 h
0 1 0 0 0 0 0 1 0 0 0 0 i
0 1 0 0 1 0 1 1 1 0 0 0 J
0 1 0 1 0 0 1 1 0 1 1 1 K
0 1 0 1 1 0 0 0 0 1 1 0 L
0 1 1 0 0 1 0 0 1 1 1 1 M
0 1 1 0 1 1 1 1 0 1 1 0 N
0 1 1 1 0 0 0 1 1 1 0 1 O
0 1 1 1 1 1 1 0 0 1 1 1 P
1 0 0 0 0 1 1 1 0 0 1 1 q
1 0 0 0 1 0 0 0 0 1 0 1 r
1 0 0 1 0 1 0 1 1 0 1 1 S
1 0 0 1 1 0 1 1 0 0 0 1 T
1 0 1 0 0 0 1 1 1 1 1 0 U
1 0 1 0 1 0 0 1 1 1 0 0 v
1 0 1 1 0 1 1 1 1 0 0 1 W
1 0 1 1 1 0 1 1 0 1 1 1 X
1 1 0 0 0 0 1 1 1 0 1 1 Y
1 1 0 0 1 1 1 0 1 1 0 1 Z
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
51
Procedimiento.
a) Realizar la programación en el programa de Microwin Step7. b) Simular la programación con el simulador S7-200 y el PC-Simu. c) Mostrar el circuito y comprobar que cumple la operación de Binario a un Abecedario. d) Realizar a partir de la tabla de verdad la programación en KOP, FUP y AWL.
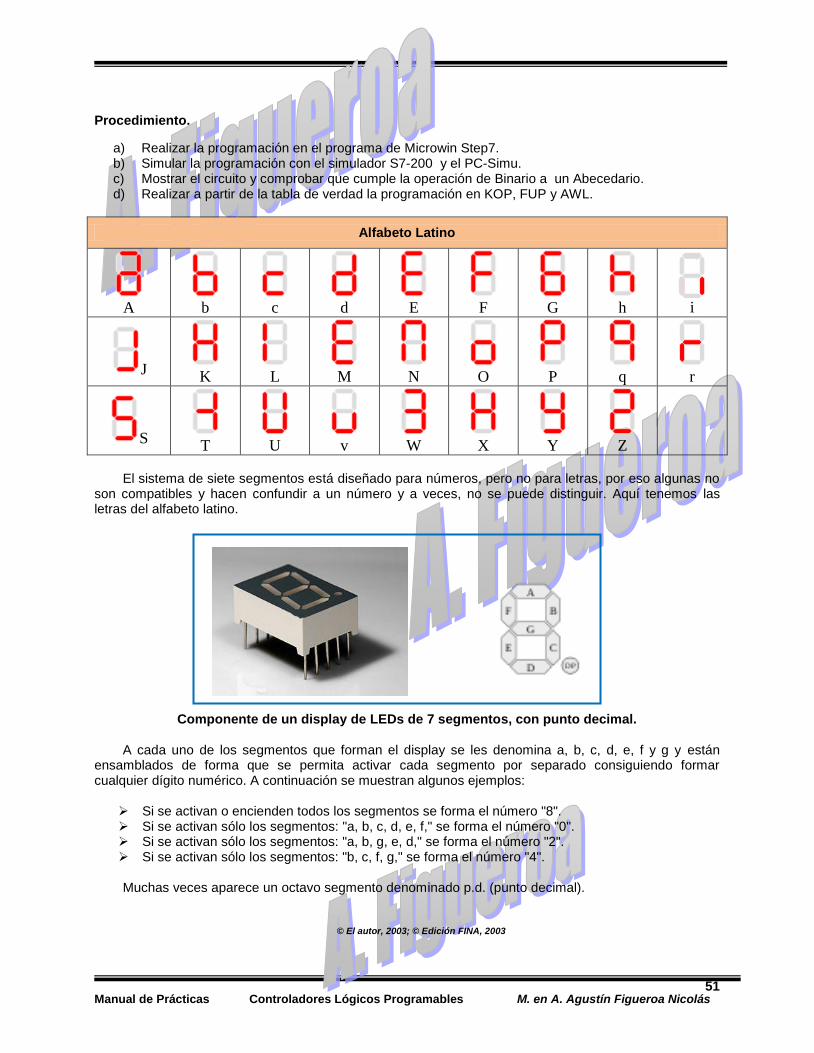
Alfabeto Latino
A
b
c
d
E
F
G
h
i
J K
L
M
N
O
P
q
r
S T
U
v
W
X
Y
Z
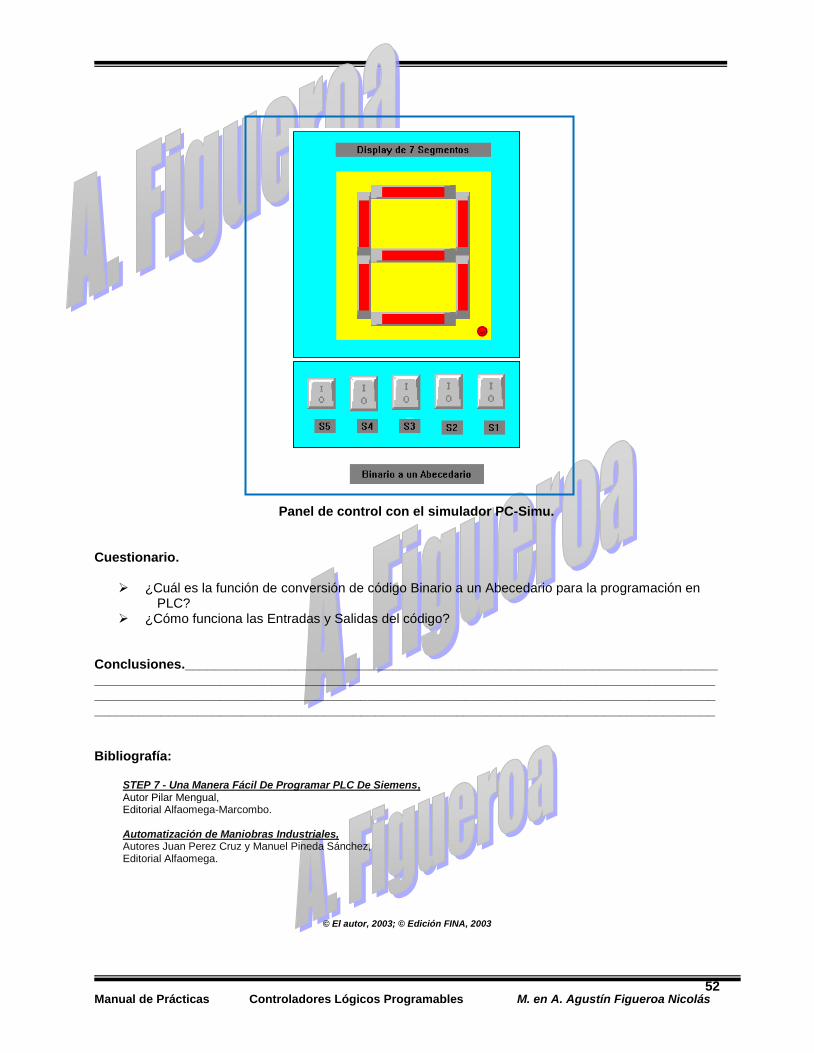
El sistema de siete segmentos está diseñado para números, pero no para letras, por eso algunas no
son compatibles y hacen confundir a un número y a veces, no se puede distinguir. Aquí tenemos las letras del alfabeto latino.
Componente de un display de LEDs de 7 segmentos, con punto decimal.
A cada uno de los segmentos que forman el display se les denomina a, b, c, d, e, f y g y están ensamblados de forma que se permita activar cada segmento por separado consiguiendo formar cualquier dígito numérico. A continuación se muestran algunos ejemplos:
Si se activan o encienden todos los segmentos se forma el número "8". Si se activan sólo los segmentos: "a, b, c, d, e, f," se forma el número "0". Si se activan sólo los segmentos: "a, b, g, e, d," se forma el número "2". Si se activan sólo los segmentos: "b, c, f, g," se forma el número "4".
Muchas veces aparece un octavo segmento denominado p.d. (punto decimal).
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
52
Panel de control con el simulador PC-Simu. Cuestionario. ¿Cuál es la función de conversión de código Binario a un Abecedario para la programación en
PLC? ¿Cómo funciona las Entradas y Salidas del código?
Conclusiones.____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
53
Práctica No.13
Manejo de un Intermitente. Objetivos.
El alumno realizará una interfaz para ver los gráficos de un intermitente en Programación PLC. Uso del Programa Microwin Step7, el simulador S7-200 y el PC-Simu. Aplicar el grafico del intermitente para la simulación de Control Lógico Programable (PLC).
Desarrollo.
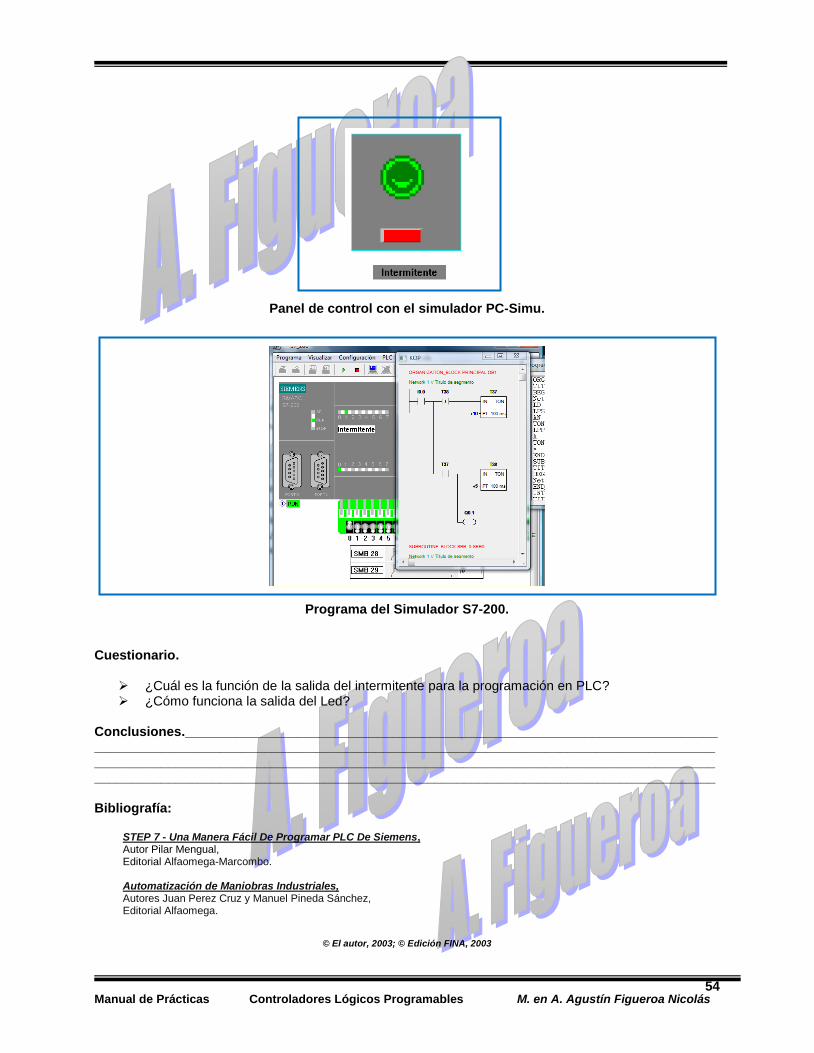
En esta práctica se plantea la utilizar una salida Q0.1 (Led) para el manejo de un intermitente.
Procedimiento.
a) Realizar la programación en el programa de Microwin Step7. b) Simular la programación con el simulador S7-200 y el PC-Simu. c) Mostrar el circuito y comprobar que cumple la operación del intermitente.
Programación para el PLC.
En la programación la condición para que la salida del Led, este encendiendo y apagando para que realice la función del intermitente.
Manejo de un Intermitente. ( Network 1 )
Programación KOP Programación AWL
Programación FUP
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
54
Panel de control con el simulador PC-Simu.
Programa del Simulador S7-200.
Cuestionario. ¿Cuál es la función de la salida del intermitente para la programación en PLC? ¿Cómo funciona la salida del Led?
Conclusiones.____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
55
Práctica No.14
Manejo de un Semáforo Simple. Objetivos.
El alumno realizará una interfaz para ver los gráficos de un semáforo simple en PLC. Uso del Programa Microwin Step7, el simulador S7-200 y el PC-Simu. Aplicar el grafico de un semáforo simple para la simulación de Control Lógico Programable (PLC).
Desarrollo.
En la práctica se utilizara tres salidas Q1.1, Q1.2 y Q1.3 para el manejo de un semáforo simple.
Procedimiento.
a) Realizar la programación en el programa de Microwin Step7. b) Simular la programación con el simulador S7-200 y el PC-Simu. c) Mostrar el circuito y comprobar que cumple la operación del semáforo simple. d) Realizar el programa en FUP y cambiar el tiempo en los temporizadores.
Programación para el PLC.
En la programación la condición para que la salida de los Led‟s, este encendiendo y apagando para pasar de uno a otro Led.
Manejo de un Semáforo Simple. ( Network 1 )
Programación KOP Programación AWL
( Network 2 )
( Network 3)
( Network 4 )
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
56
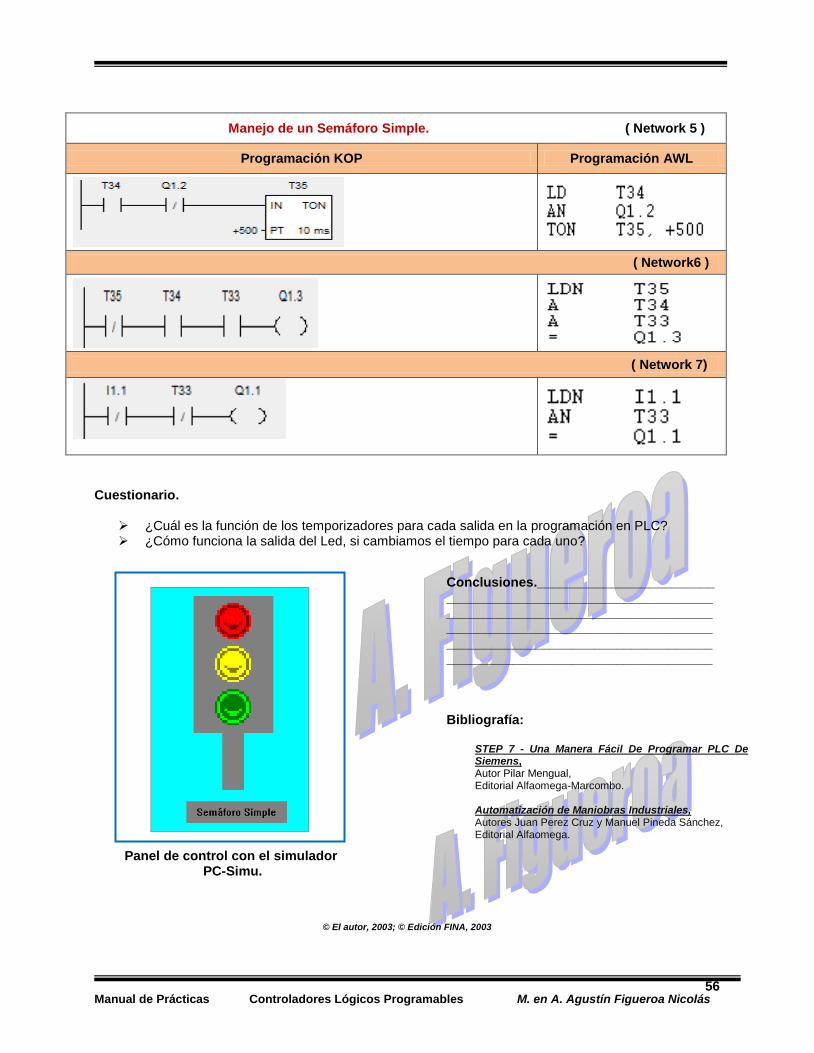
Manejo de un Semáforo Simple. ( Network 5 )
Programación KOP Programación AWL
( Network6 )
( Network 7)
Cuestionario. ¿Cuál es la función de los temporizadores para cada salida en la programación en PLC? ¿Cómo funciona la salida del Led, si cambiamos el tiempo para cada uno?
Panel de control con el simulador PC-Simu.
Conclusiones.____________________________________________________________________________________________________________________________________________________________________________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
57
Práctica No. 15
Paro y Arranque de un Motor.
Objetivo.
Conocer el funcionamiento del mando por impulso momentáneo o no mantenido desde un punto, con prioridad de la función MARCHA (Arranque) sobre la función PARO (ejecución fuera de norma).
Funcionamiento.
El contactor K1 conecta al dar un impulso momentáneo sobre el pulsador marcha S1, y queda autoalimentado o automantenido por su contacto abierto, al soltar aquél.
La desconexión del K1 se produce al oprimir momentáneamente el pulsador paro S0. Al oprimir ambos pulsadores a la vez tiene prioridad la orden de conexión sobre la de desconexión. Ejecución inusual por el peligro que existe al pulsar y soltar S0 y estar oprimido S1.
Procedimiento.
d) Realizar la programación en KOP a partir del circuito de control de la Figura 1. e) Simular la programación con el simulador S7-200 y el PC-Simu. f) Mostrar el circuito y comprobar que cumple la operación de paro y arranque del motor.
Programación KOP Programación FUP Programación AWL
Conclusiones.__________________________________ ______________________________________________ ______________________________________________ ______________________________________________ ______________________________________________ ______________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
Figura 1.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
58
Práctica No. 16
Encendido Directo y Apagado de un Motor Mediante Autorretención
Objetivos.
Aprender a configurar la autorretención de contactos para así poder aplicarla en el laboratorio. Aprender a utilizar distintos tipos de señalizaciones mediante pilotos. Aprender a utilizar las “marcas” en Step 7.
Ejercicio de Aplicación.
Diseñar e implementar el programa y circuitos para realizar el arranque directo de un motor de CA de jaula de ardilla, con señalización de funcionamiento del motor (piloto verde) y falla por sobre carga (piloto rojo). Desarrollo.
A continuación se muestran la asignación de variables, el circuito de potencia y el programa que se pueden implementar para cumplir con el objetivo de esta práctica. Asignación de variables:
Entradas Salidas
1PB - Pulsador de marcha 1M - Contactor Motor
2PB - Pulsador de paro L3 - Piloto verde
OL - Contacto auxiliar relé L2 - Piloto rojo
Circuito de Potencia:
Figura 1.
Programa:
Realizar el Programa en KOP, FUP y AWL.
Conclusiones._______________________________________________________________________________________________________________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
59
Práctica No. 17
Encendido y Apagado de un Motor Mediante un Telerruptor.
Objetivos.
Aprender a utilizar las “marcas” en step 7. Aprender a utilizar la activación de contactos mediante flancos (de subida y de bajada). Aprender a controlar (encendido/apagado) cargas mediante un solo interruptor.
Contenido.
1. ¿Qué es un Telerruptor? 2. ¿Qué es una marca? 3. ¿Para qué se utiliza una marca?
Desarrollo.
Se deberá resolver el contenido de la práctica después de haber leído la guía preliminar, la cual está anexa al principio del libro. El profesor será el encargado de guiar y verificar el proceso. Ejercicio de Aplicación.
Desarrollo de un programa de aplicación. Diseñar e implementar el programa y circuito que permita encender y apagar una carga desde un
solo punto, con señalización de funcionamiento y falla por sobrecarga. Desarrollo (Cont.):
A continuación se muestran la asignación de variables, el circuito de potencia y el programa que se pueden implementar para cumplir con el objetivo de esta práctica. Asignación de variables:
Entradas Salidas
1PB - Pulsador de inicio/paro 1M – Contactor para motor.
2PB - Pulsador de emergencia L2 - Piloto verde
OL - Contacto auxiliar relé L3 - Piloto rojo
Circuito de potencia:
Figura 2.
Programa:
Realizar el Programa en KOP, FUP y AWL. Conclusiones._______________________________________________________________________________________________________________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
60
Práctica No. 18
Control de dos motores por medio de pulsadores de marcha y paro. Objetivos. Observar los distintos usos y aplicaciones que ofrece el PLC. Aprender a configurar las herramientas que ofrece el PLC
Ejercicio de Aplicación.
Se desea controlar dos motores por medio de dos pulsadores (marcha y paro), 1PB y 2PB. Al presionar por primera vez el pulsador 1PB se conecta a la línea el motor 1, al presionarlo por
segunda vez se conecta a la línea el motor 2 con sus respectivos señalizadores. Al presionar 2PB se apaga el motor o los motores que estén en funcionamiento. Se debe tener protección contra sobrecarga por medio de un relé y la actuación de este debe
generar una alarma luminosa. Desarrollo.
A continuación se muestran la asignación de variables, el circuito de potencia y el programa que se pueden implementar para cumplir con el objetivo de esta práctica. Asignación de variables:
Entradas Salidas
1PB - Pulsador de inicio/paro 1M - Contactor para Motor
2PB - Pulsador de emergencia L2 - Piloto verde
OL - Contacto auxiliar relé L3 - Piloto rojo
Circuito de potencia:
Figura 3.
Programa: Realizar el Programa en KOP, FUP y AWL.
Conclusiones.___________________________ _______________________________________
© El autor, 2003; © Edición FINA, 2003
Bibliografía: Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
61
Práctica No. 19
Control de un Garaje.
Objetivo. Utilizar distintas herramientas que ofrece el PLC y observar cómo funcionan en un ejemplo de la
vida cotidiana. Ejercicio de Aplicación.
Automatizar un garaje de cinco plazas de tal forma que si éste se encuentra lleno, se encienda una luz indicándolo y no suba la barrera de entrada (sólo la de salida). En caso contrario deberá estar encendida otra luz indicando “LIBRE” estando habilitadas las dos barreras.
El garaje consta de 5 plazas. Además se debe tener una señalización que indique que el sistema está listo para arrancar.
Disponemos de un sensor fotoeléctrico y una barrera en la entrada y lo mismo en la salida. Desarrollo.
A continuación se muestran la asignación de variables, el diagrama y el programa que se pueden implementar para cumplir con el objetivo de esta práctica.
Asignación de variables:
Entradas Salidas
S1-Sensor fotoeléctrico para la entrada 1M – Contactor para motor 1.
S2 - Sensor fotoeléctrico para la salida 2M – Contactor para motor 2.
L2 - Luz de señalización de “LLENO”
L3 - Luz de señalización de “LIBRE”
Diagrama:
Figura 4.
Programa:
Realizar el Programa en KOP, FUP y AWL. Conclusiones._______________________________________________________________________________________________________________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
62
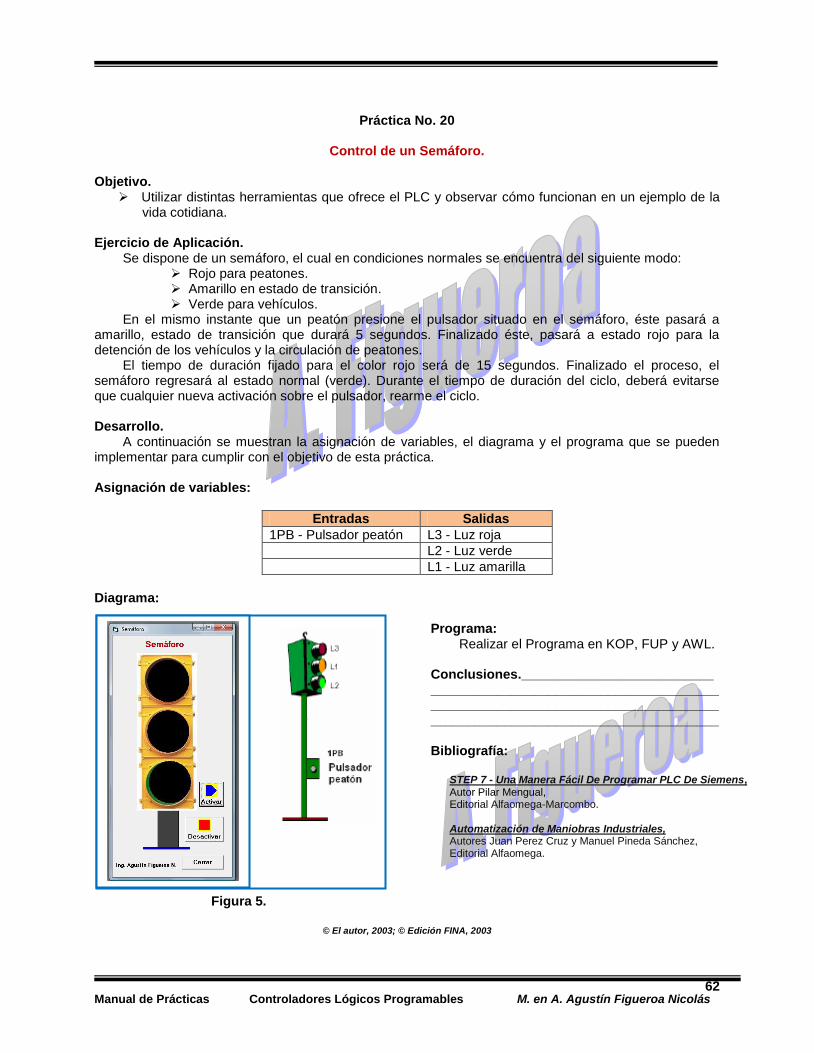
Práctica No. 20
Control de un Semáforo. Objetivo. Utilizar distintas herramientas que ofrece el PLC y observar cómo funcionan en un ejemplo de la
vida cotidiana. Ejercicio de Aplicación.
Se dispone de un semáforo, el cual en condiciones normales se encuentra del siguiente modo: Rojo para peatones. Amarillo en estado de transición. Verde para vehículos.
En el mismo instante que un peatón presione el pulsador situado en el semáforo, éste pasará a amarillo, estado de transición que durará 5 segundos. Finalizado éste, pasará a estado rojo para la detención de los vehículos y la circulación de peatones.
El tiempo de duración fijado para el color rojo será de 15 segundos. Finalizado el proceso, el semáforo regresará al estado normal (verde). Durante el tiempo de duración del ciclo, deberá evitarse que cualquier nueva activación sobre el pulsador, rearme el ciclo. Desarrollo.
A continuación se muestran la asignación de variables, el diagrama y el programa que se pueden implementar para cumplir con el objetivo de esta práctica. Asignación de variables:
Entradas Salidas
1PB - Pulsador peatón L3 - Luz roja
L2 - Luz verde
L1 - Luz amarilla
Diagrama:
Figura 5.
Programa:
Realizar el Programa en KOP, FUP y AWL. Conclusiones._______________________________________________________________________________________________________________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003
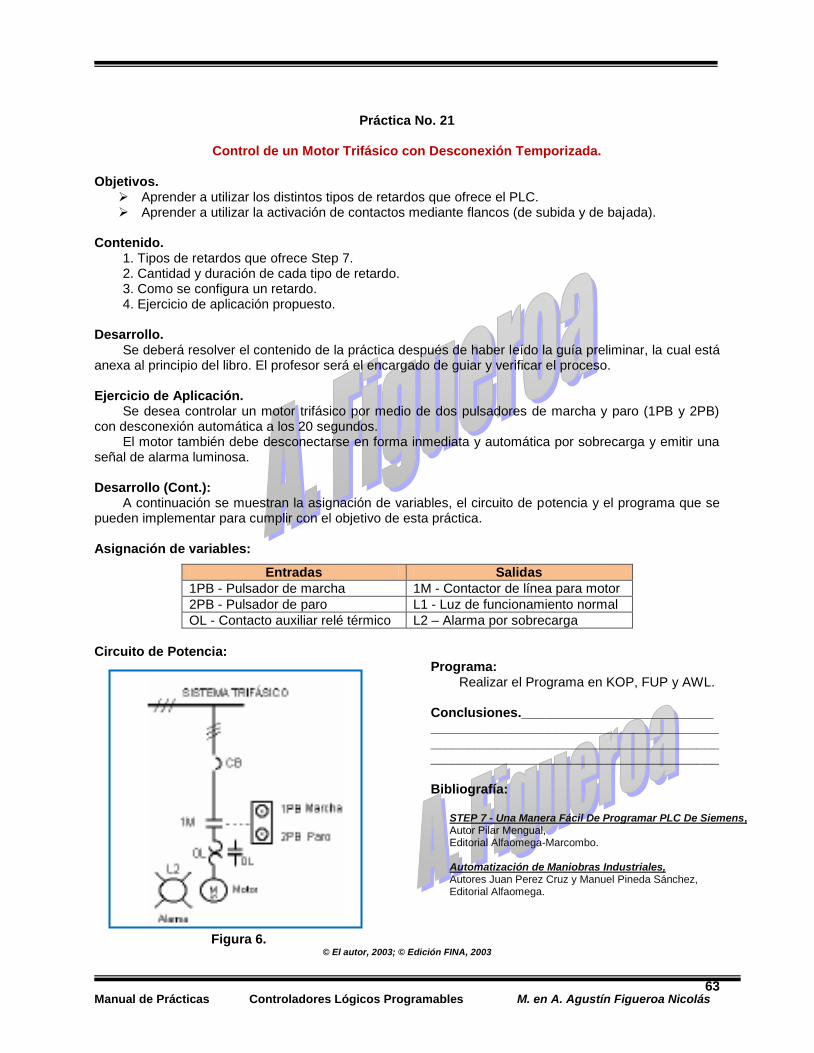
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
63
Práctica No. 21
Control de un Motor Trifásico con Desconexión Temporizada. Objetivos. Aprender a utilizar los distintos tipos de retardos que ofrece el PLC. Aprender a utilizar la activación de contactos mediante flancos (de subida y de bajada).
Contenido.
1. Tipos de retardos que ofrece Step 7. 2. Cantidad y duración de cada tipo de retardo. 3. Como se configura un retardo. 4. Ejercicio de aplicación propuesto.
Desarrollo.
Se deberá resolver el contenido de la práctica después de haber leído la guía preliminar, la cual está anexa al principio del libro. El profesor será el encargado de guiar y verificar el proceso. Ejercicio de Aplicación.
Se desea controlar un motor trifásico por medio de dos pulsadores de marcha y paro (1PB y 2PB) con desconexión automática a los 20 segundos.
El motor también debe desconectarse en forma inmediata y automática por sobrecarga y emitir una señal de alarma luminosa. Desarrollo (Cont.):
A continuación se muestran la asignación de variables, el circuito de potencia y el programa que se pueden implementar para cumplir con el objetivo de esta práctica.
Asignación de variables:
Entradas Salidas
1PB - Pulsador de marcha 1M - Contactor de línea para motor
2PB - Pulsador de paro L1 - Luz de funcionamiento normal
OL - Contacto auxiliar relé térmico L2 – Alarma por sobrecarga
Circuito de Potencia:
Figura 6.
Programa:
Realizar el Programa en KOP, FUP y AWL. Conclusiones._______________________________________________________________________________________________________________________________________________
Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003
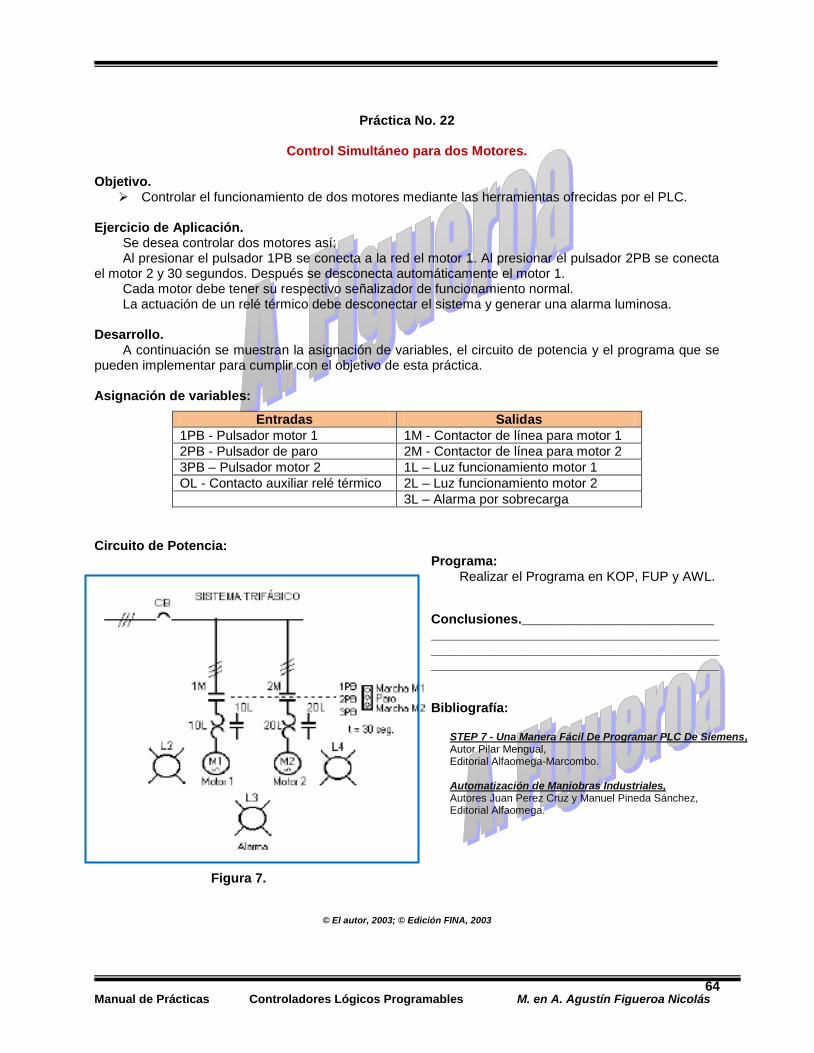
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
64
Práctica No. 22
Control Simultáneo para dos Motores.
Objetivo. Controlar el funcionamiento de dos motores mediante las herramientas ofrecidas por el PLC.
Ejercicio de Aplicación.
Se desea controlar dos motores así: Al presionar el pulsador 1PB se conecta a la red el motor 1. Al presionar el pulsador 2PB se conecta
el motor 2 y 30 segundos. Después se desconecta automáticamente el motor 1. Cada motor debe tener su respectivo señalizador de funcionamiento normal. La actuación de un relé térmico debe desconectar el sistema y generar una alarma luminosa.
Desarrollo.
A continuación se muestran la asignación de variables, el circuito de potencia y el programa que se pueden implementar para cumplir con el objetivo de esta práctica. Asignación de variables:
Entradas Salidas
1PB - Pulsador motor 1 1M - Contactor de línea para motor 1
2PB - Pulsador de paro 2M - Contactor de línea para motor 2
3PB – Pulsador motor 2 1L – Luz funcionamiento motor 1
OL - Contacto auxiliar relé térmico 2L – Luz funcionamiento motor 2
3L – Alarma por sobrecarga
Circuito de Potencia:
Figura 7.
Programa:
Realizar el Programa en KOP, FUP y AWL.
Conclusiones._______________________________________________________________________________________________________________________________________________
Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003
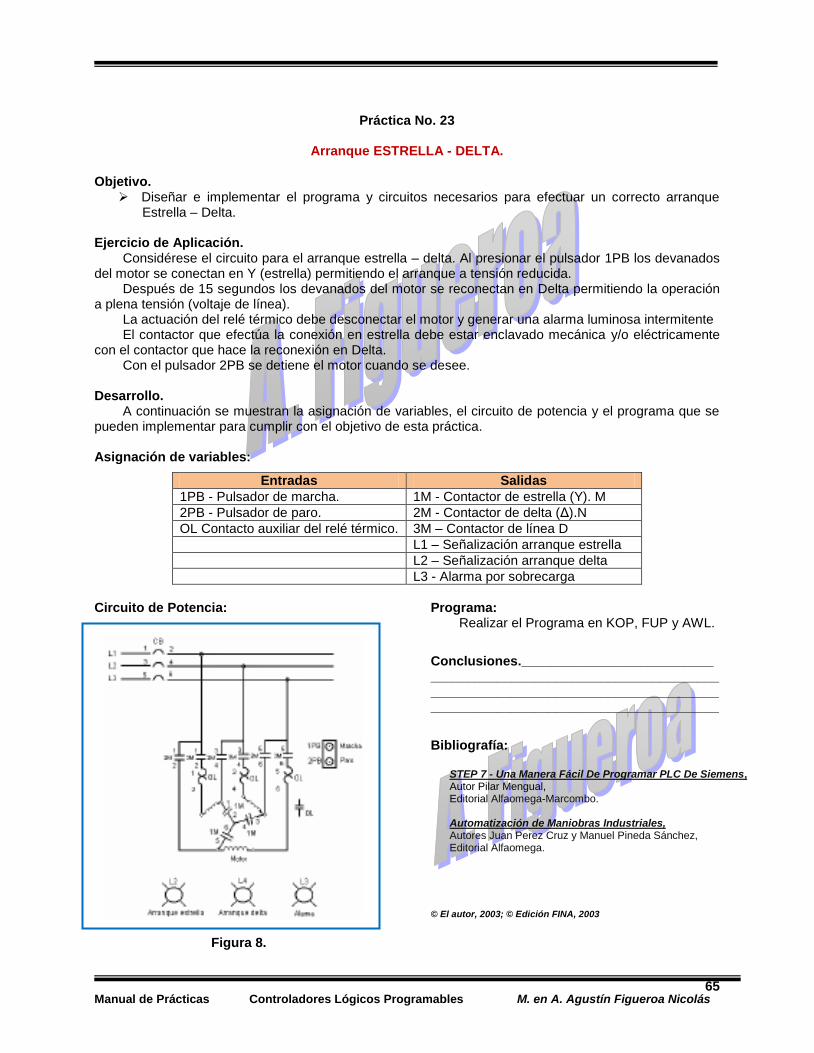
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
65
Práctica No. 23
Arranque ESTRELLA - DELTA.
Objetivo. Diseñar e implementar el programa y circuitos necesarios para efectuar un correcto arranque
Estrella – Delta. Ejercicio de Aplicación.
Considérese el circuito para el arranque estrella – delta. Al presionar el pulsador 1PB los devanados del motor se conectan en Y (estrella) permitiendo el arranque a tensión reducida.
Después de 15 segundos los devanados del motor se reconectan en Delta permitiendo la operación a plena tensión (voltaje de línea).
La actuación del relé térmico debe desconectar el motor y generar una alarma luminosa intermitente El contactor que efectúa la conexión en estrella debe estar enclavado mecánica y/o eléctricamente
con el contactor que hace la reconexión en Delta. Con el pulsador 2PB se detiene el motor cuando se desee.
Desarrollo.
A continuación se muestran la asignación de variables, el circuito de potencia y el programa que se pueden implementar para cumplir con el objetivo de esta práctica. Asignación de variables:
Entradas Salidas
1PB - Pulsador de marcha. 1M - Contactor de estrella (Y). M
2PB - Pulsador de paro. 2M - Contactor de delta (Δ).N
OL Contacto auxiliar del relé térmico. 3M – Contactor de línea D
L1 – Señalización arranque estrella
L2 – Señalización arranque delta
L3 - Alarma por sobrecarga
Circuito de Potencia:
Figura 8.
Programa: Realizar el Programa en KOP, FUP y AWL.
Conclusiones._______________________________________________________________________________________________________________________________________________
Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
66
Práctica No. 24
Control electromagnético de un motor de CA de jaula de ardilla. Frenado Electromagnético
Objetivos. Efectuar el correcto frenado electromagnético mediante las herramientas que ofrece el PLC. Observar los tiempos de maniobra con y sin frenado electromagnético.
Ejercicio de Aplicación.
Diseñar e implementar el programa y los circuitos necesarios para el arranque directo en vacío de un motor trifásico CA de jaula de ardilla a plena carga con señalización y protección contra sobrecarga.
Cuando se presione el pulsador de paro se debe frenar el motor mediante la aplicación de CD; este control debe estar temporizado.
La actuación del relé térmico debe desconectar el motor y generar una alarma luminosa. Desarrollo.
A continuación se muestran la asignación de variables, el circuito de potencia y el programa que se pueden implementar para cumplir con el objetivo de esta práctica. Asignación de variables:
Entradas Salidas
1PB - Pulsador de marcha. 1M - Contactor de línea para motor.
2PB - Pulsador de paro 2M - Frenado.
OL - Contacto auxiliar relé térmico 1L – Luz funcionamiento motor.
2L – Alarma por sobrecarga.
Circuito de Potencia:
Figura 9.
Programa:
Realizar la Programa en KOP, FUP y AWL.
Conclusiones.___________________________________________________________________________________________________________________________________________________
Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003
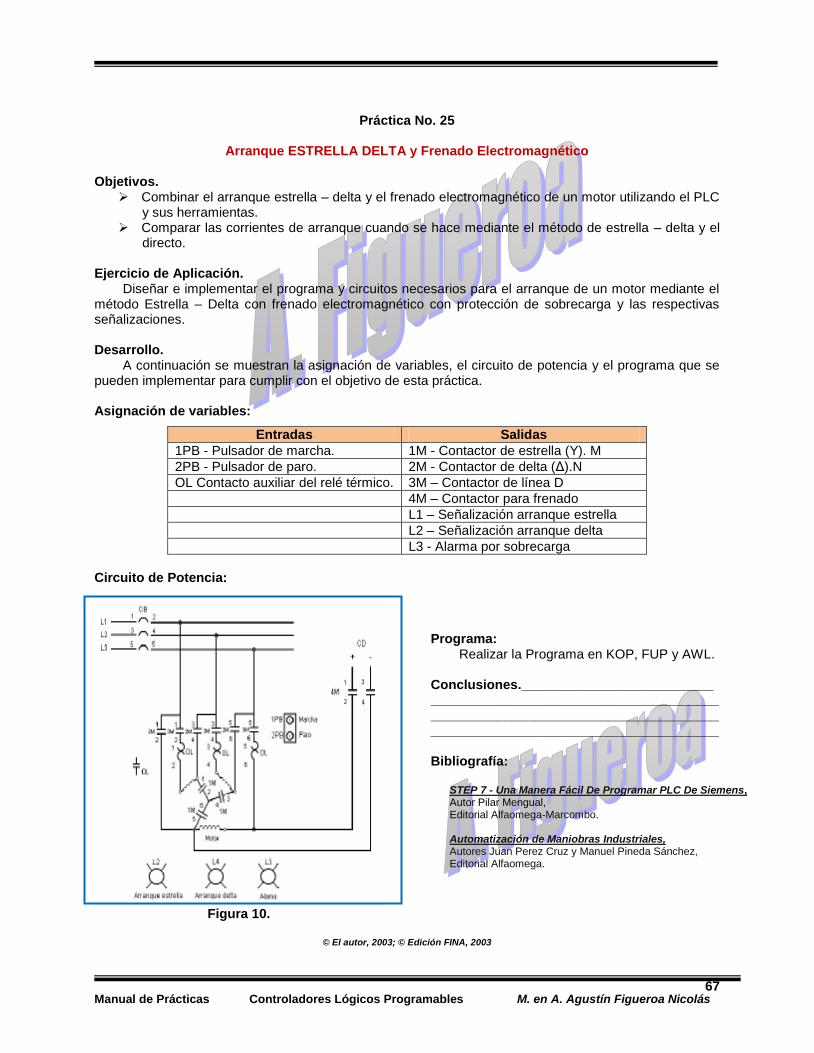
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
67
Práctica No. 25
Arranque ESTRELLA DELTA y Frenado Electromagnético
Objetivos. Combinar el arranque estrella – delta y el frenado electromagnético de un motor utilizando el PLC
y sus herramientas. Comparar las corrientes de arranque cuando se hace mediante el método de estrella – delta y el
directo. Ejercicio de Aplicación.
Diseñar e implementar el programa y circuitos necesarios para el arranque de un motor mediante el método Estrella – Delta con frenado electromagnético con protección de sobrecarga y las respectivas señalizaciones. Desarrollo.
A continuación se muestran la asignación de variables, el circuito de potencia y el programa que se pueden implementar para cumplir con el objetivo de esta práctica. Asignación de variables:
Entradas Salidas
1PB - Pulsador de marcha. 1M - Contactor de estrella (Y). M
2PB - Pulsador de paro. 2M - Contactor de delta (Δ).N
OL Contacto auxiliar del relé térmico. 3M – Contactor de línea D
4M – Contactor para frenado
L1 – Señalización arranque estrella
L2 – Señalización arranque delta
L3 - Alarma por sobrecarga
Circuito de Potencia:
Figura 10.
Programa:
Realizar la Programa en KOP, FUP y AWL. Conclusiones._______________________________________________________________________________________________________________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Perez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
68
Práctica No. 26
Control para una Escalera Electromecánica.
Objetivo. Utilizar distintas herramientas que ofrece el PLC y observar cómo funcionan en un ejemplo de la
vida cotidiana. Ejercicio de Aplicación.
Una escalera mecánica se coloca en el estado de disponibilidad para el servicio por medio de un interruptor de llave S1. El arranque se efectúa automáticamente al ser interrumpida una celda fotoeléctrica lo cuál debe ser señalizado mediante una lámpara que supone que una persona ha entrado a la escalera.
Después de cada interrupción de la celda fotoeléctrica, la escalera debe permanecer conectada durante 40 segundos. La desconexión de la escalera también puede suceder como consecuencia de:
Actuación sobre S1 en la posición de apagado. El accionamiento de dos pulsadores de paro de emergencia S2 y S3. La actuación del relé térmico que protege el motor de la escalera. En este caso se debe generar
una alarma luminosa. Para reiniciar el sistema se debe volver a accionar con el interruptor de llave.
Desarrollo.
A continuación se muestran la asignación de variables, el circuito de potencia y el programa que se pueden implementar para cumplir con el objetivo de esta práctica. Asignación de variables:
Entradas Salidas
(S1) - Interruptor general de llave. 1M Contactor de línea motor escalera.
F (S2) – Sensor fotoeléctrico L2- Luz funcionamiento normal
S2 (3PB)-Pulsador paro de emergencia superior. L3 - Alarma de sobrecarga.
S3 (4PB) -Pulsador paro de emergencia inferior.
OL - Contacto auxiliar relé térmico.
Diagrama:
Figura 11.
Programa:
Realizar la Programa en KOP, FUP y AWL.
Conclusiones._______________________________________________________________________________________________________________________________________________
Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Pérez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
69
Práctica No. 27
Control para una Banda Transportadora. Objetivo. Utilizar distintas herramientas que ofrece el PLC combinándolas con el uso de sensores y
observar cómo funcionan en un ejemplo de la industria. Ejercicio de Aplicación.
Se tiene una banda transportadora que debe transportar elementos que proceden de 3 puestos diferentes de montaje.
Al colocar una pieza sobre la banda se acciona un sensor de peso (o fotoeléctrico) S1, S2, S3 en cada punto.
En cada uno de los puestos de montaje se tiene una lámpara de señalización L2, L3, L4 la cual se enciende cuando es activado el respectivo sensor de peso.
Después de la colocación del último elemento de montaje se arranca el motor de la banda de forma automática.
El motor permanece conectado durante 30 seg., que es el tiempo de transporte entre el puesto N1 y el recolector. Después de este tiempo se detiene la banda automáticamente, apagándose las lámparas de cada puesto. Con ello se indica que puede reiniciar el proceso.
La actuación del relé térmico que protege el motor de la escalera. En este caso se debe generar una alarma luminosa. Desarrollo.
A continuación se muestran la asignación de variables, el circuito de potencia y el programa que se pueden implementar.
Asignación de variables:
Entradas Salidas
S1- Sensor de posición o de peso del puesto N°1. 1M – Contactor motor de banda transportadora
S2 - Sensor de posición o de peso del puesto N°2. L2 - Señalización operación puesto N°1.
S3 - Sensor de posición o de peso del puesto N°3. L3 - Señalización operación puesto N°2.
OL Contacto auxiliar del relé térmico L4 - Señalización operación puesto N°3.
L1 - Alarma por sobrecarga
Diagrama:
Figura 12
Programa: Realizar la Programa en KOP, FUP y AWL.
Conclusiones._______________________________________________________________________________________________________________________________________________
Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Pérez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003

Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
70
Práctica No. 28
Contador de objetos para Banda Transportadora. Objetivo.
Utilizar distintas herramientas que ofrece el PLC combinándolas con el uso de sensores y observar cómo funcionan en un ejemplo de la industria.
Ejercicio de Aplicación.
Se desea implementar un circuito para el conteo de los objetos que se desplazan sobre una banda transportadora.
Al presionarse 1PB debe ponerse en funcionamiento la banda transportadora con señalización de funcionamiento.
Cada vez que un objeto interrumpe el rayo de luz, el sensor fotoeléctrico genera un impulso sobre la entrada del contador el cual está programado para un acumulado de 100.
Al presentarse el lleno del contador el motor debe desconectarse automáticamente y generar durante 30 seg. Una señal de alarma luminosa por medio de L3. Así mismo, el contador debe reposicionarse en ceros para disponer de un nuevo conteo a partir del instante en que se vuelva a poner en funcionamiento la banda transportadora.
Con el pulsador 2PB se detiene a voluntad la banda transportadora. Desarrollo.
A continuación se muestran la asignación de variables, el circuito de potencia y el programa que se pueden implementar para cumplir con el objetivo de esta práctica. Asignación de variables:
Entradas Salidas
1PB - Pulsador de marcha. 1M - Contactor de motor banda.
2PB - Pulsador de paro. L2- Luz funcionamiento normal.
F – Interruptor fotoeléctrico. L3 – Luz que Indica lleno del contador.
Diagrama:
Figura 13.
Programa:
Realizar la Programa en KOP, FUP y AWL.
Conclusiones._________________________________________________________________
© El autor, 2003; © Edición FINA, 2003
Bibliografía: STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Pérez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
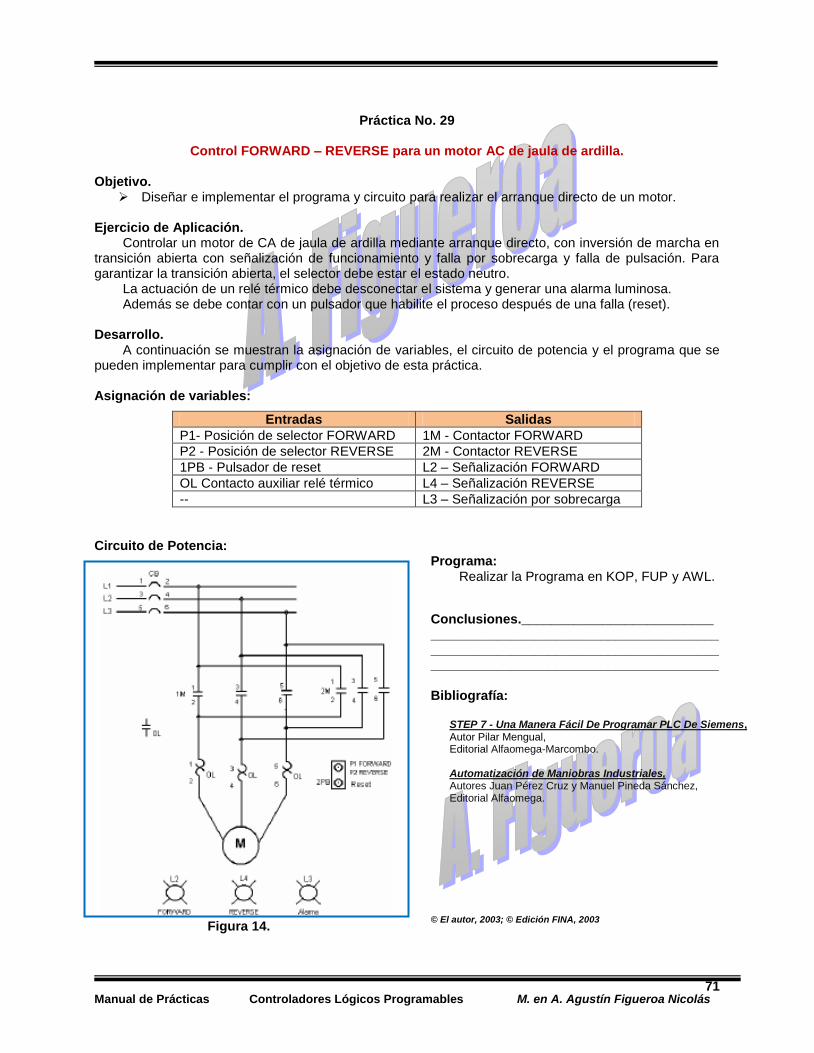
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
71
Práctica No. 29
Control FORWARD – REVERSE para un motor AC de jaula de ardilla.
Objetivo. Diseñar e implementar el programa y circuito para realizar el arranque directo de un motor.
Ejercicio de Aplicación.
Controlar un motor de CA de jaula de ardilla mediante arranque directo, con inversión de marcha en transición abierta con señalización de funcionamiento y falla por sobrecarga y falla de pulsación. Para garantizar la transición abierta, el selector debe estar el estado neutro.
La actuación de un relé térmico debe desconectar el sistema y generar una alarma luminosa. Además se debe contar con un pulsador que habilite el proceso después de una falla (reset).
Desarrollo.
A continuación se muestran la asignación de variables, el circuito de potencia y el programa que se pueden implementar para cumplir con el objetivo de esta práctica. Asignación de variables:
Entradas Salidas
P1- Posición de selector FORWARD 1M - Contactor FORWARD
P2 - Posición de selector REVERSE 2M - Contactor REVERSE
1PB - Pulsador de reset L2 – Señalización FORWARD
OL Contacto auxiliar relé térmico L4 – Señalización REVERSE
-- L3 – Señalización por sobrecarga
Circuito de Potencia:
Figura 14.
Programa:
Realizar la Programa en KOP, FUP y AWL.
Conclusiones._______________________________________________________________________________________________________________________________________________
Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Pérez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003
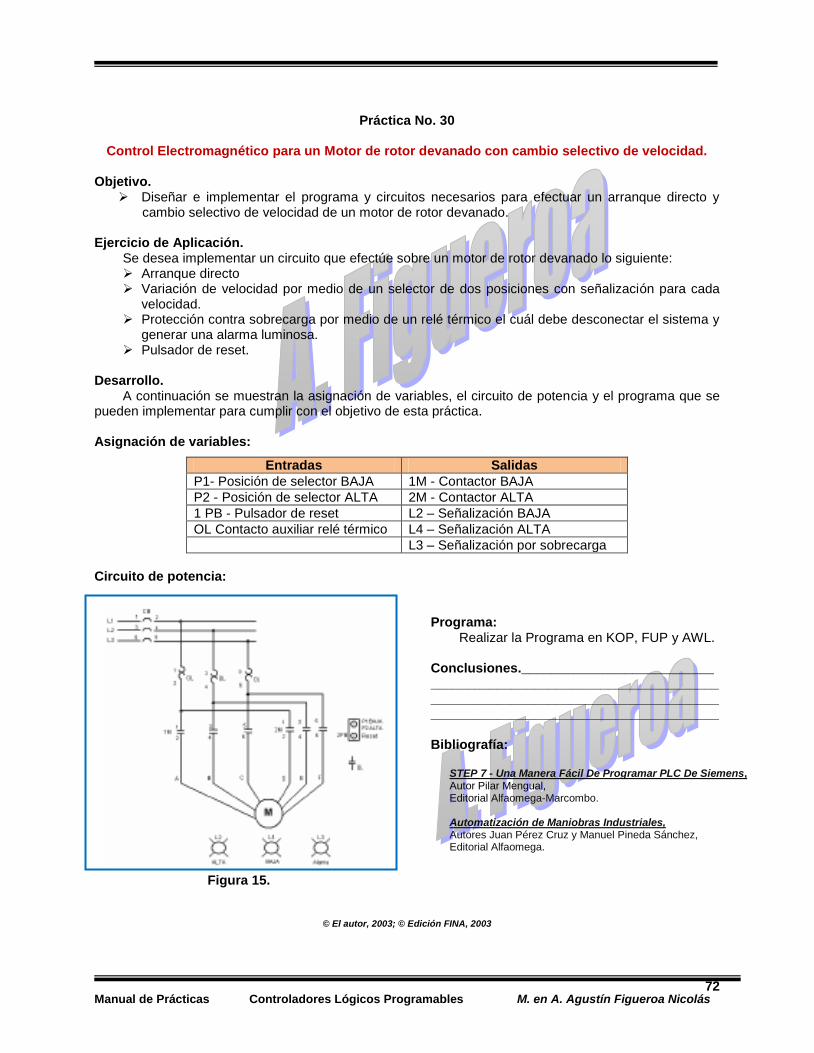
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
72
Práctica No. 30
Control Electromagnético para un Motor de rotor devanado con cambio selectivo de velocidad. Objetivo. Diseñar e implementar el programa y circuitos necesarios para efectuar un arranque directo y
cambio selectivo de velocidad de un motor de rotor devanado. Ejercicio de Aplicación.
Se desea implementar un circuito que efectúe sobre un motor de rotor devanado lo siguiente: Arranque directo Variación de velocidad por medio de un selector de dos posiciones con señalización para cada
velocidad. Protección contra sobrecarga por medio de un relé térmico el cuál debe desconectar el sistema y
generar una alarma luminosa. Pulsador de reset.
Desarrollo.
A continuación se muestran la asignación de variables, el circuito de potencia y el programa que se pueden implementar para cumplir con el objetivo de esta práctica. Asignación de variables:
Entradas Salidas
P1- Posición de selector BAJA 1M - Contactor BAJA
P2 - Posición de selector ALTA 2M - Contactor ALTA
1 PB - Pulsador de reset L2 – Señalización BAJA
OL Contacto auxiliar relé térmico L4 – Señalización ALTA
L3 – Señalización por sobrecarga
Circuito de potencia:
Figura 15.
Programa:
Realizar la Programa en KOP, FUP y AWL.
Conclusiones._______________________________________________________________________________________________________________________________________________ Bibliografía:
STEP 7 - Una Manera Fácil De Programar PLC De Siemens, Autor Pilar Mengual, Editorial Alfaomega-Marcombo. Automatización de Maniobras Industriales, Autores Juan Pérez Cruz y Manuel Pineda Sánchez, Editorial Alfaomega.
© El autor, 2003; © Edición FINA, 2003
Manual de Prácticas Controladores Lógicos Programables M. en A. Agustín Figueroa Nicolás
73
Simulador de Tarjeta de Adquisición de datos
Data_Asus_7404_PLC.
© El autor, 2003; © Edición FINA, 2003





























