Embed Size (px)
Citation preview

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 1 -
Instytut Elektrotechniki E l e c t r o t e c h n i c a l I n s t i t u t e
Ph.D. Thesis
M. Sc. Artur J. Moradewicz
Contactless Energy Transmission
System with Rotatable Transformer
- Modeling, Analyze and Design
Energoelektroniczny System Zasilania Bezstykowego
z Transformatorem Obrotowym -
- Modelowanie, Analiza i Projektowanie
Thesis supervisor
Prof. Dr Sc. Marian P. Kazmierkowski
Warsaw, Poland 2008

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 2 -
Preface
The work presented in this thesis was carried out during my Ph.D. work at the
Electrotechnical Institute – Department of Electric Drives.
I would like to express my gratitude for my supervisor Professor Marian P.
Kazmierkowski, whose guidance, encouragement and continuous support made this
thesis possible. His excellent communication skill and insight made each discussion
become a valuable chance for me to learn about my work and scientific inspiration.
I am also grateful to Prof. Jan Iwaszkiewicz from the Electrotechnical Institute,
Gdansk Branch and Prof. Jerzy T. Matysik from the Institute of Control and Industrial
Electronics, Warsaw University of Technology, for their interest in this work and
holding the post of referee.
Furthermore, I thank all Colleagues from the Department of Electric Drives for
their support, assistance and friendly atmosphere.
Finally, I am very grateful for my wife Dagmara’s and son Adam’s love,
patience and faith. I would also like to thank my whole family, particularly my parents
for their care over the years.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 3 -
Table of Contents
1. Introduction ……………………………………………………………… 5
2. Review of Contactless Inductive Coupled Energy Transmission (CET) Systems ……………………………………………………………. 82.1 Basic Principles of Operation……………………………………………. 8
2.2 CET Systems with Multiple Secondary Winding………………………... 9
2.3 CET Systems with Cascaded Transformers……………………………… 10
2.4 CET Systems with Sliding Transformers………………………………... 11
2.5 CET Systems with Multiple Primary Winding…………………………... 13
2.6 Summary and Conclusion………………………………………………... 14
3. Transformer Model in CET System…………………………………….. 16
3.1 Introduction………………………………………………………………. 16
3.2 Two winding transformers……………………………………………….. 16
3.2.1 Ideal Transformer……………………………………………….. 17
3.2.2 Π – model as a Practical Transformer………………………….. 18
3.2.3 Conversion of Transformer Π-model to Coupled Inductor Model …………………………………….. 21
3.3 Magnetic and Electrical Model Analogy………………………………… 21
3.4 Examples of the Rotating Transformer Construction……………………. 23
3.5 Transformation of Magnetic to Electric Model………………………….. 25
3.6 Calculation of Section Reluctance in the Pot Core Rotatable Transformer. ………………………………………………….. 303.7 Measurement of Transformer Parameters………………………………... 32
3.7.1 No Load Test……………………………………………………. 32
3.7.2 Transformer Short Circuit Test…………………………………. 33
3.7.3 Leakage and Mutual Inductances Measurements………………. 33
3.8 Transformer Copper and Core Losses Ratio…………………………….. 36
3.9 Conclusion……………………………………………………………….. 37
4. Power Converters Used in Contactless Energy Transmission Systems 39
4.1 Introduction………………………………………………………………. 39

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 4 -
4.2 Basic Principles of Resonant Converters………………………………… 40
4.2.1 Resonant Converters Topologies……………………………….. 40
4.2.2 The Leakage Inductances Compensation in CET System……… 44
4.2.3 Analysis of Series-Series Resonant Converter…………………. 46
4.2.4 Analysis of Series-Parallel Resonant Converter………………... 53
4.2.5 Summary and Conclusions……………………………………... 57
4.3. CET System with Series Topology Compensation……………………… 61
4.3.1. CET System with Secondary Compensation…………………... 62
4.3.2 CET System with Primary Compensation ……………………... 65
4.3.3. CET System with Compensation Capacitors on Both Side of the Transformer……………………………………………… 68
4.3.4. Voltage Gain Behavior of the SS-compensated Circuit……….. 70
4.4 Conclusions……………………………………………………………… 76
5. Control and Protection System…………………………………………. 77
5.1 Introduction……………………………………………………………… 77
5.2 Control System Operation and Behavior………………………………… 77
6. Design and Description of Laboratory Prototype …………………….. 85
6.1 Introduction…………………………………………...………………….. 85
6.2 Design Procedure of CET System……………………………………….. 85
6.3 Description of the Laboratory Prototype………………………………… 86
7. Simulation and Experimental Results………………………………….. 91
7.1 Introduction………………………………………………………………. 91
7.2 Performance Characterization of SS and SP Compensation Circuits……. 917.3 Investigation Results of Developed CET System ……………………….. 93
8. Summary and Closing Conclusions……………………………………... 101
References…………………………………………………………………… 103
Appendixes…………………………………………………………………... 108

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 5 -
1. Introduction
Recently, the contactless energy transmission (CET) systems are developed and
investigated widely [see list of References]. This innovative technology creates new
possibilities to supply mobile devices with electrical energy because elimination of cables,
connectors and/or slip-rings increase reliability and maintenance-free operation of such a
critical systems as in aerospace, biomedical and robotics applications. Figure 1.1 shows
classification of the CET systems. As “medium” for contactless energy transfer could be used
electromagnetic waves including light, acoustic waves (sound) as well as electric field. In the
most popular applications, the core of CET system is inductive or capacitive coupling
between power source and load, and high switching frequency converter.
Fig. 1.1. Classification of Contactless/Wireless Energy Transmission Systems
The capacitive coupling (Fig. 1.2b) is used in low power range (e.g. supply systems for
sensors) whereas inductive coupling (Fig. 1.2a) allows transferring power from a few mW up
to hundred kW [26]. It should be noted that there is no commonly accepted nomenclature in
CET systems. Some authors use term “wireless” [6, 18-20, 27, 48, 51] instead of
“contactless” energy transmission or power supply. In author opinion the term “wireless”
energy transmission (or power supply) should be used only to describe systems where energy
is transmitted on longer distance (several meter), like for cellular phone or wireless-sensor
technology [6, 27].
In this work only inductive coupled CET systems are considered. The potential applications
for such a technology are practically endless and can range from the transfer of energy
between low power home and office devices to high powered industrial applications. Medical,

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 6 -
marine, and other applications where physical electrical contact might be dangerous (battery
chargers), impossible or very problematic, are all prospective candidates for the use of
contactless energy transfer CET systems.
Air gap
b)a)
Ferromagneticmaterial
Fig. 1.2. Inductive (a) and capacitive (b) coupling used in CET systems.
Because of many parameters used in specification of a CET system, it has to be designed and
adapted to individual conditions and there is no one universal solution. This thesis is limited
to investigation of inductive coupled CET system with rotatable transformer which is used in
industrial robots and manipulators, however, the results are valid for wide range other
applications. In spite of many papers presenting individual solution of inductive coupled CET
systems (5), [4, 8-15, 18, 23-25, 33-35, 37, 45-46, 56] there is no commonly accepted control
and design methodology. Because of high switching frequency (fsw ≥ 20 kHz) used in CET
converters, most of the reported systems has been build in hardware technology (5), (8), [30-
35, 45, 46, 55] and implemented control and protection methods were characteristic for
hardware based approach. However, there is a need to develop more sophisticated method
which could easy be implemented in digital signal processors (DSP) or programmable logical
controllers like FPGA circuits. Therefore, author of this work has formulated the following
thesis:
“Use of an extreme regulator which controls amplitude of primary current or the phase
angle between primary side voltage and current in inductive coupled Contactless Energy
Transmission (CET) systems provides high efficiency energy transfer for wide range of
inductive coupling factor values”.
In order to prove the above thesis, the author used an analytical and simulation based
approach, as well as experimental verification on the laboratory setup with a 3 kW CET
system with rotatable transformer. Thus, the new CET system should guarantees:
- High total efficiency thanks to optimization of all system-components,

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 7 -
- Optimal operation of high-switching frequency power transistor based resonant converter,
- Low cost single board FPGA based controller,
- Reliable and fast operation,
- Flexibility to parameter changes of the main circuit
The thesis consists of seven chapters. Chapter 1 is an introduction. In Chapter 2 a review
of basic concepts and solutions of inductive coupled contactless energy transmission systems
are presented. Chapter 3 describes in a systematical way modeling and parameter optimization
of transformer used in CET systems. Also, the measurement technique of practical
transformer is presented and results are compared with analytical calculations. Very important
is Chapter 4 in which resonant power converter is analyzed and several variants of leakage
inductance compensation method as well as operation characteristic are discussed. Chapter 5
describes the control, monitoring and protection system implemented in programmable logic
circuit FPGA (Stratix II EP2S60F1020C3ES – device). The 3 kW series-series (SS) resonant
converter laboratory prototype with rotatable transformer is described in Chapter 6. In
Chapter 7 simulation study and experimental verification of the developed CET system are
presented. Finally, Chapter 8 includes summary and general conclusions. The thesis is
supplemented by 5 Appendices.
In the author’s opinion the following parts of the thesis represent his original
contribution:
• Development of simulation models for the contactless energy transmission system
including:
a) Rotatable transformer using QuickField and Matlab packages (Chapter 3)
b) Analyze of resonant circuits using Matlab packages (Section 4.3)
c) Series–series high-frequency resonant converter using OrCAD-PSpice and
SABER packages (Chapters 4 and 5)
d) Control and Protection block using OrCAD-PSpice and SABER packages
(Chapters 6 and 7).
• Design, construction and verification of the experimental setup with rotatable
transformer and 3 kVA resonant converter.
• Elaboration and implementation of FPGA (Stratix II EP2S60F1020C3ES – device)
based control and protection system for resonant converter (Chapter 6).
• Elaboration of design methodology for contactless energy transmission system
verified by simulation and laboratory investigations.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 8 -
2. Review of Contactless Inductive Coupled Energy
Transmission (CET) Systems
2.1 Basic Principles of Operation
Figure 2.1 shows the block diagram of typical inductive coupled CET systems. It
consists of primary side DC/AC resonant converter which converts DC into high frequency
AC energy. Next the AC energy via transformer with inductive coupling factor k is
transmitted to the secondary side. The secondary side is not connected electrically with
primary and, therefore, can be movable (linearly or/and rotating) giving flexibility, mobility
and safeness for supplied loads. In the secondary side the high frequency AC energy is
converted safety by AC/DC converter to meet requirements specified by the load parameters.
In most cases as the AC/DC converter simply diode rectifier with capacitive filter is used.
DC
SO
UR
CE
LOA
D
Fig. 2.1. Block scheme of CET system
However, in some applications an active rectifier or inverter (for stabilized DC or AC loads)
is required [13, 14, 37]. Hence, the inductive coupled CET system consists mainly of resonant
converter and large air gap transformer. Depending on the power range and air gap length
different transformer cores can be used (see Chapter 3).

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 9 -
Fig. 2.2. Power range of Contactless Energy Transmission (CET) systems
based on inductive coupling versus air gap wide.
A general overview representing construction of inductive coupling used in CET systems is
shown in Fig. 2.2. It can be seen that for high power and low air gap, transformers with
magnetic cores in primary and secondary side are applied. Contrary, for large air gap and low
power air transformers (coreless) are preferred. A special case is a sliding transformer which
can have construction for linear or circular movement [2, 30, 36]. The final configuration of
CET systems depends also strongly on number of loads to be supplied. In such cases
transformer with multiwinding secondary or primary side are used. In the next subsection
some selected examples of inductive coupled CET systems will be presented.
2.2 CET Systems with Multiple Secondary Winding
The CET system of Fig. 2.1 can be equipped with multiple secondary winding as
shown in Fig. 2.3. This is very flexible solution in which several isolated and/or moving loads
can be supplied. In situations when stabilized AC or DC loads are required, an additional
active DC/AC or DC/DC converter has to be added (Fig. 2.3). Of course, it results in
additional losses and efficiency reduction. Based on this idea, in [13, 14], a CET system has
been proposed which can be compared to a plug-and-socket extension cable. Instead of

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 10 -
inserting a plug into a socket, a connection between supply line (cable) and loads (clamps) is
established using CET. Also, ABB Corporate Research, Ladenburg, Germany has developed
a factory communication and wireless power supply system for sensors and actuators called
WISA [49, 50, 51]. In this solution a coreless single winding primary side (constructed in
form of a frame) is coupled with distributed multiple secondary windings to supply sensors
and actuators with 10 mW output power each.
DC
DC
DC
AC
DC
AC
C1
C1
L Lk
DC
DCDC
AC
SECONDARY SIDEAC/DC - DC/DC
CONVERSIONRESONANT CIRCUIT
C1
DC
ACC1
SECONDARY SIDEAC/DC
CONVERSIONRESONANT CIRCUIT
SALVE INDUCTANCE
COUPLING FACTOR
PRIMARY SIDESUPPLY CONVERTER
RESONANT CIRCUIT
SECONDARY SIDEAC/DC - DC/DC
CONVERSION
RESONANT CIRCUIT
PRIMARY WINDINGS
SECONDARYWINDINGS
Fig. 2.3. Contactless energy transmission (CET) system with multiple secondary winding
The transformers used in the system of Fig. 2.3 can have different construction:
stationary, rotating, rotatable, with magnetic core or coreless. As an example a rotating
transformer with double parallel connected secondary windings is used in contactless energy
transmission (CET) system for power supply of airborne radar systems [44, 45].
2.3 CET Systems with Cascaded Transformers
In Fig. 2.4 a CET system used in power supply for robots and manipulators [11] is
shown. The indirect DC link AC/DC/AC power converter generates a square wave voltage of
200V– 600V and 20–60 kHz frequency. This voltage is fed to the primary winding of first
rotatable transformer located on the first axis of the robot. The transformer secondary side is
connected to the next DC link AC/DC/AC power converter, which using pulse width

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 11 -
modulation (PWM) technique, generates variable frequency AC voltage to supply first three
phase motor. The transformer secondary is also connected to the primary of the next rotatable
transformer which is located on the second joint of the robot. The transformer feeds the
second axis drive in similar way as described above for the first machine. More transformers
may be added to create arrangement of an AC bus throughout the robot. Similar system is
applied for multi-layer optical disc used in data storage systems [15]. However, the output
power in optical disc is in the range of 20–30 mW, whereas in robots supply 10-20 kW.
Fig. 2.4. Contactless energy transmission (CET) system with cascaded transformers.
2.4 CET Systems with Sliding Transformers
Contactless electrical energy delivery systems used in long distance are based on
sliding transformers with long primary windings [2, 30, 36]. Basically, two configurations are
applied: primary winding forming elongated loop as long as range of receiver movement is
required (Fig.2.6a) or circular form for circular movement (Fig. 2.6b). The output converter(s)
and load(s) are directly connected to secondary winding placed on movable magnetic core.
PRIMARY WINDINGS
SECONDARY WINDINGS
FERRITE CORE
1U
Fig. 2.5. Example of sliding transformer construction for linearly moving secondary

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 12 -
a)
b)
Fig. 2.6. Basic configuration of CET system with sliding transformer; (a) for linear movement, (b) for circular movement
The magnetic core constructions enable for free movement of secondary winding along of the
primary winding loop (Fig. 2.5). The sliding transformer gives possibility to construct long
contactless, electrical energy delivery systems for mobile receivers. These transformer cores
are composed of many strips of magnetic materials. Regarding magnetic and mechanical
properties, the amorphous or nanocristalic magnetic materials are preferable.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 13 -
However, when high dynamic properties of mobile receiver are required, some problem may
appear because of core inertia. Heavy magnetic core is fixed with the energy receiver (Fig.
2.5), therefore it increases mass of on the secondary side. The length of primary winding is in
the range of 1–70m and output power 1–200kW [36].
2.5 CET Systems with Multiple Primary Winding
Contactless Energy Transfer (CET) system with multiple primary winding without
magnetic core is presented in Fig. 2.7. In these solutions electrical energy is transferred
between primary and secondary coils through inductive coupling across an air gap. The
multiple primary winding consist of a matrix of small (20-40 mm) hexagon or circular shape
spiral coils embedded into desktop and creating a power supply array to transfer energy for
consumer electronic devices placed on the table. An electronic device like: laptop, portable
music-player, cellular phone, etc., should have the secondary coils mounted in their casing.
When such a devices are placed on the desktop array, the primary and secondary coils will
automatically coupled enabling contactless energy transfer. To reduce magnetic field stray
and improve total efficiency, only limited number of primary coils, located closest to the
device, are excited (darkened coils in the Fig. 2.7).
Fig. 2.7. Contactless Energy Transfer (CET) system with multiple primary winding creating a power
supply array for consumer devices; only darkened coils placed closest to the device are excited.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 14 -
When design such a CET system care has to be taken on optimized primary and secondary
coils to get magnetic coupling that is as constant as possible for a sufficiently large area. Also
special problem is separate power supply for every primary winding and its control [52].
The same approach is used, as competitive solution to sliding transformer, for moving
actuators and so called “flying robots” [4].
2.6 Summary and Conclusion
A brief review of basic contactless energy transfer (CET) systems, with special focus
on inductively coupled solution, is given in this Chapter. Several group of application with
typical specification are summarized in the Table 2.1. Key conclusions include the following:
● The CET systems are used in power range from mW (biomedicine, sensors,
actuators, etc.) till several hundred kW (cranes, fast battery charging);
● The final efficiency achieved by inductively coupled CET systems is in the range of
60-90% for low and high power applications, respectively;
Table 2.1. Overview of Inductive Coupled CET Systems
Transformer construction
DC/ AC converter O
utpu
t Po
wer
Out
put
Vol
tage
Air
Gap
le
ngth
Max
. ef
ficie
ncy
Application
/ Primary side Secondary side Topology Freq.
[kHz] [W] [V] [mm] [%] -
1 Single
winding ferrite core
Single winding ferrite core
Full bridge MOSFET/
IGBT
20 - 100
1 - 150 kW
15 - 350 0.2 – 1 1- 300
≥ 90 ≥ 80
Battery chargers [12, 17, 23-26, 28-29, 33-35,40, 56]
2 Single Coreless
Triply ferrite core moving
Flyback MOSFET 125 0.1 3.0 DC - Biomedical
[40, 43, 48,]
3 Single
winding ferrite
Double ferrite rotating
Full bridge MOSFET 100 1000 54 DC 0.25 - 2 ≥ 90 Biomedical
[40, 43, 48,]
4 Single
winding coreless
Multiwinding ferrite core movable
Full bridge MOSFET 80 2 x
240 240 AC 50 Hz 2 - 5 ≈ 90
Multiple users Mobile devices
[6, 13, 14]
5 Single
winding coreless
Multiwinding coreless movable
Full/Half Bridge
MOSFET 120
Each load 0.01
5 - 15 1000 - 7000 -
Industrial sensors and actuators, ABB [1,18-20, 41-42, 49-
51]
6 Single
winding ferrite core
Single winding ferrite core
rotatable/linear
Full bridge IGBT 20-40
10 – 60 kW
3 x 230V AC
0.2 - 2 ≥ 92 Robots and manipulators [11,15]
7
Multiple winding coreless
(Desktop)
Single winding coreless movable
Half bridge MOSFET
100 - 400
30 - 300 12 2 - 5 ≈ 90
Stationary (laptops, phone) or mobile
(actuators) [4, 6, 8-10, 27, 52, ]

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 15 -
● In high power (>1kW) transformers with core winding are applied;
● In low power (<100 mW) air gap coupling and very high transmission frequency
(100 – 1000 kHz) is preferred;
● For long distance mobile loads CET systems with sliding transformers are used;
● There is no one standard solution of CET system, every design has to take into
account several specific parameters and user conditions.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 16 -
3. Transformer Model in CET Systems 3.1 Introduction Magnetic components are a vital part of most power electronic equipment, and the models
used in a simulation must faithfully reproduce or predict the behavior of the circuit. Most of
the other electronic components in these circuits have predetermined models that have been
derived from standardized components. Magnetic components, however, are rarely
standardized and are generally designed for specific applications. In most cases the model, or
at least the component values within the model, must be altered for each new circuit
simulation.
L1 L3
L2
M12 M23
M13
Fig. 3.1. The transformer model as coupled inductances
Figure 3.1. show the model under assuming that a transformer can be represented by an
inductor for each winding (L1, L2, … Ln) and a series of mutual inductances between the
windings (M12, M2, … Ln).
3.2 Two Winding Transformers
The usual method of a transformer simulation is via the specification of the open-
circuit inductance that is seen at each winding, and then the addition of the coupling
coefficients to a pair of coupled inductors.
1υ 2υ
1i 2iN1 N2
Fig. 3.2. A two-winding transformer.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 17 -
This approach tends to lose the physical meaning associated with leakage and magnetizing
inductance and does not allow the insertion of a nonlinear core. However, it provides a
transformer model that is simple to create and simulate efficiently. The CET transformer, its
related equations, and its relationship to an ideal transformer with added leakage and
magnetizing inductance are discussed in this Section.
Algebraically, the voltages for two winding transformer equations, using the self and mutual
inductances can be express as:
dtdiL
dtdiM
dtdiM
dtdiL
22
1122
212
111
+=
+=
υ
υ (3.1)
And for the multi-winding transformer (Fig. 3.1) equation (3.1) can be rewritten in the matrix
form as:
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
dtdi
dtdi
LM
LMML
nnnn
nij
n
.
.
.
.................................................................................
.....................................
.
.
.
1
1
22
1111
υ
υ
(3.2)
The mutual inductance is related to the magnetic coupling factor k and self winding
inductances of primary and secondary side:
21LL
Mk = (3.3)
3.2.1 Ideal Transformer
Considering the two winding transformer, and applying the Ampere’s law, yields
2211 ININMMF += (3.4)
Substituting CRMMF ⋅Φ= we obtain
2211 ININRC +=⋅Φ (3.5)
However, in the ideal transformer the resistances of the winding are neglected and assuming
the core reluctance RC = 0. Thus, above Eq. (3.5) becomes:

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 18 -
22110 ININ += (3.6)
and applying the Faraday’s law to an ideal transformer are obtains:
dtdN
dtdN CC Φ
=Φ
= 2211 υυ (3.7)
For the ideal transformer Eq. (3.6 - 7) can be rewritten as:
1
2
2
1
2
1
2
1
NN
ii
NN
−=
=υυ
(3.8)
N1 N2
+ +
- -
1υ 2υ
1i 2i
Fig. 3.3 Equivalent scheme of ideal transformer.
3.2.2 Π – Model as a Practical Transformer
The transformer model shown in Fig. 3.3 is an abstract model. The reluctance RC in practical
transformer is nonzero. Substituting the expression for Φ Eq. (3.7) into (3.5), we obtain:
dtNNiid
RN
C
⎟⎟⎠
⎞⎜⎜⎝
⎛+
= 1
2212
11υ (3.9)
The Eq. (3.9) consists of two main terms. The first term: CR
NL2
112 = – magnetizing
inductance, referred to the primary transformer side. Second term, 1
221 N
Niiim += -
magnetizing current referred to the primary transformer side. To more deeply analysis we
need, however, a circuit model that includes leakage and magnetizing inductance and a turn’s
ratio. An example of this type of model is shown in Fig. 3.4.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 19 -
L12
L22L11
N1 N2
1υ 2υ
1i 2i
Fig. 3.4. Structure of the Π model. Two-winding transformer model including magnetizing inductance L12, primary and secondary leakage inductances L11, L22 and number of turns N1, N2.
The leakage inductances of transformer winding are mainly determinate by leakage fluxes
Φ11, Φ22, which are linked only to one winding primary or secondary, respectively.
2
22222
1
11111 i
NLi
NL Φ=
Φ= (3.10)
The leakage inductances are in series with the windings, so the transformer self inductances
can be written as:
1
2122221222
2
1121112111
NNMLLLL
NNMLLLL
+=+=
+=+= (3.11)
where
L1 – primary self inductance,
L2 – secondary self inductance,
L12 – magnetizing inductance referred to the primary side,
L21 – magnetizing inductance referred to the secondary side,
M12 – mutual inductance between primary and secondary winding.
The magnetizing and mutual inductance are expressed as:
2
2
12112
2
121
1
21212
⎟⎟⎠
⎞⎜⎜⎝
⎛=
==
NNLL
NNL
NNLM
(3.12)
If the transformer turns ratio n is define as
1
2
NNn = (3.13)
the relationship between the two winding transformer inductances in model of Fig. 3.1 and
Fig. 3.4 yields:

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 20 -
12
122
222
12111
nLMLnLL
LLL
=+=
+=
(3.14)
and coupling factor
( )( )122
221211
12
LnLLLnLk
++= (3.15)
So, the equation for circuit shown in Fig. 3.4. can be expressed as:
( )
( )dtdiLnL
dtdinL
dtdinL
dtdiLL
212
222
1122
212
112111
++=
++=
υ
υ (3.16)
If we assume the same numbers of primary and secondary winding N1 = N2, the inductances
in Eq. (3.14) can be described as follows:
12
12222
12111
LMLLLLLL
=+=+=
(3.17)
Additionally, if LLL == 21 (Fig. 3.2) the leakage inductances and coupling factor will
reduce to:
121222111 M
kkMLLL −
=−== (3.18)
LMk 12= (3.19)
Figure 3.5 show another equivalent transformer scheme. The following equation for this
model can be written:
2221
2112
2112
NPL
NPL
NNPM
m
m
m
=
=
=
(3.20)
Pm
L22L11
1υ 2υ
1i 2iN1 : 1 1 : N2
Fig. 3.5. Transformer model with magnetizing permeance.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 21 -
The presented above inductance value L1, L2, L12, L21 and the permeance Pm are always
positive. The turn’s ratio n can be positive or negative depending on the transformer winding
direction. The mutual inductance M12 can be also negative or positive in that aspect (7). In
conventional transformer, coupling factor is normally very close to 1 and the leakage
inductances are close to zero. The range of k ∈(-1, 1) represents the degree of magnetic
coupling between the primary and secondary transformer side. The coupling factor k
decreases when the core saturates.
3.2.3 Conversion of Transformer Π - model to Coupled Inductor Model
To use the coupled inductor model (Fig. 3.1), it is necessary to determine the values in
the Π model and then convert them to the values for the coupled inductor model.
The main problem in the analysis of coupled inductor transformer model is precision of
determination circuit parameters. In a typical transformer, the magnetizing inductance (L12)
has a value of few mH. The leakage inductances, however, are below of μH level. The value
of coupling coefficient k must be specified with enough accuracy to recreate this difference
accurately. This problem is good illustrated by inversion of Eq. (3.14).
2112
21222
21111
LLnk
L
LLnkLL
LLnkLL
=
−=
−=
(3.21)
Example value:
For L12 = 5 mH, leakage inductances = 0.5 μH, n = 1, k12 = 0.99990 for the preceding
values. It could appear some differences between determined inductances values. Therefore,
the coupling factor should be computed, in general, to four decimal places.
3.3 Magnetic and Electrical Model Analogy
The basic problem in the simulation model building with magnetic components is
conversion physical structure of the device into equivalent electrical circuit. The reluctance
based transformer model showed in Fig. 3.11 is then converted into an electric model based
on the duality properties (Tab. 3.1) between the magnetic and electric fields, provides a means
to accomplish this task. Reluctance modeling creates a magnetic circuit model that can then

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 22 -
be converted into an electric circuit model. Table 3.1 shows analogous quantities between
electric and magnetic circuits.
Tab. 3.1. Magnetic and Electric Circuit Analogous Quantities
Magnetic Electric NIF ≡ magnetic circuit voltage
(Magnetomotive force) V - electric circuit voltage
(Electromotive force) H - magnetic field intensity E - electric field intensity
∫ =⋅= mm HlldHF ∫ =⋅−= cc ElldEV
mm lNI
lFH ==
clVE =
B - magnetic flux density J - current density HB μ= EJ σ=
μ - permeability σ - conductivity
mH7
0 104 −⋅= πμ
φ - magnetic flux I - electric current
∫ =⋅= mBAsdBφ csJAsdJI =⋅−= ∫
'R - reluctance R - resistance
LN
AlFR
m
m2
' ==Φ
=μ
c
c
Al
IVR
σ==
'1
RP = - permeance RG 1= - conductance
By comparing the form of the equations in each column, the following analogous between
magnetic and electrical quantities can be identified:
• MMF (F) and EMF (V)
• Magnetic field (H) and Electric field (E) intensities
• Flux density (B) and current density (J)
• Flux (φ ) current (I)
• Reluctance (R’) and resistance (R)
• Permeability (μ) and conductivity (σ)
However, the analogy quantities are of course, not complete. There are some differences:
• The relationship between B and H in soft magnetic materials, is usually non-linear,
• The leakage flux in the magnetic structure with an air gap, change the total reluctance
of the magnetic circuit. In the electrical circuit there is no such effect. The electrical
isolation conductivity is on the order 1020 times lower than the conductivity of circuit

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 23 -
wires. Contrarily, the permeance of the air μ0 is only 103 times less than the
permeance of magnetic material.
• M – mutual inductance and k – coupling factor also do not have an analogue in
electrical circuit,
• The power losses in the wires carrying current are RI ⋅2 , however there is no loses in
magnetic circuits describes as '2 R⋅φ .
Reluctance is computed in the same manner as resistance, that is, from the dimensions of the
magnetic path and the magnetic conductivity (μ). For a constant cross-sectional area (Am) and
the magnetic path (lm), the magnetic reluctance is given by:
m
m
AlRμ
=' (3.22)
where: rμμμ 0= , μr - relative permeability.
The inductance of a magnetic circuit is directly related to reluctance R and the number
of winding turns N by:
PNRNL 2
'
2== (3.23a)
and
PNNRNNM 21
2112 == (3.23b)
3.4 Examples of the Rotating Transformer Construction
In this section several transformer constructions used in the industry devices based on
the pot cores are presented. The tentative selection of a magnetic core and number of winding
turns is the first step in designing the rotating transformer. Equation (3.24) is directly derived
from Faraday’s law and gives the required number of primary winding turns N for optimum
utilization (ΔBmax) of a magnetic core with an effective area Ae, when a voltage pulse U1 of
duration dmax/fs is applied across the winding.
es ABfdUN
⋅Δ⋅⋅
=max
max11 2
(3.24)
Equation (3.24) can be iteratively evaluated for various sizes of a pot-core family. Each core
size requires a specific number of turns for optimum utilization. In turn, N1 defines the
magnetizing current and, hence, the wire thickness that is required in each case. The

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 24 -
appropriate magnetic core is the smallest one that can accommodate the required copper in its
window area. This is only a tentative selection, as in a rotating transformer, there are some
additional issues (such as the fringing-field effect) that need to be considered before the final
decision is made.
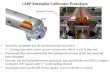
Fig. 3.6. Pot core rotatable transformer with separating cores and adjacent windings.
Secondary winding
Air gap
Ferrite
Primary winding
Fig. 3.7. Pot core rotatable transformer with separating cores and overlapping coaxial windings.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 25 -
Fig. 3.8. Rotatable transformer with overlapping coaxial windings on the common part of the core.
3.5 Transformation of Magnetic to Electric Model.
This subsection describes and shows transformation process of reluctance based
transformer model to inductances based electrical model. Figure 3.9 presents a cut section of
the rotatable pot core transformer and magnetic paths in the transformer structure. The
transformer core is divided into the single sections. Each section is represented by a magnetic
reluctance. According to Eq. (3.22) the magnetic reluctance Ri for a magnetic flux in the i
section is defined as:
ir
ii A
lRi
μμ0
= ⎥⎦⎤
⎢⎣⎡
H1 (3.25)
li – length of the magnetic path in the section,
Ai – active core section area,
μri – relative permeability of the section.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 26 -
Fig.3.9. The pot core transformer with separating cores and adjacent windings.
.
Fig. 3.10. The cross section area of the pot core transformer with depicted the main flux path flow
(on the left part) and reluctance in the single section of the both cores.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 27 -
The building process of the transformer model can by divided into following steps:
- divide the core (magnetic flux path), including the air gap, into the single sections
(Fig. 3.10),
- assign and compute the reluctance values for each sections,
- assign to the primary and secondary windings magnetic voltage sources,
- draw the reluctance based transformer model (as shown in Fig. 3.10),
- convert reluctance model into the permeance model, (Fig. 3.13),
- scale the permeance model to the transformer winding turns,
- replace the scaled permeances by inductors,
- in order to provide the correct voltages, for multiple transformer windings, use ideal
transformer model.
The reluctance based model of the CET transformer, which is show in Fig. 3.11 includes:
- voltage source for primary and secondary winding N1 and N2 respectively,
- cores section reluctances and air gap reluctance for the common flux path,
- reluctances for the leakage flux associated with primary and secondary windings.
Rc34
N1*I1
Rc23
Rc12
Ra23
Ra34
Ra12
Ra23
Rc34
Rc12
N2*I2
Rc23
Fig. 3.11. Reluctance based transformer model.
Similarly as resistances in the electric circuit, the series connected reluctances in magnetic
circuit can be summed. For the convenience of analysis, we assumed that the primary and
secondary transformer cores have the same shapes and dimensions. In such case the
reluctance of both cores have the same value Rpc =Rsc
342312 cccscpc RRRRR ++== (3.26)
The reluctance signified as Ra12 and Ra34 on the Fig. 3.11, are on the path of the main
magnetic flux, and currying the flux in the same direction. So, the resultant reluctance in the
air for the main magnetic flux yields:

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 28 -
3412 aaa RRR += (3.27)
Based on Eq. (3.20-21), the transformer reluctance model can be modified as shown Fig. 3.12
N1*I1
RpcRa23
Ra
Ra23
N2*I2
Rsc
Fig. 3.12. Reluctance based model for two winding CET transformer.
The reluctance model is transformed into a permeance model in the next, as shows Fig. 3.13.
The reluctances have become permeances, the magnetic current (φ ) has become a magnetic
voltage, the magnetic voltage source has become a magnetic current source, and the series
branches has become parallel branches.
1/Ra23 1/Ra23
1/Rpc 1/Ra 1/Rpc
N1I1 N2I2
Fig. 3.13. Permeance based model for two winding CET transformer. Transformer M – model.
The transformer model presented in the Fig. 3.13 is also called M – model. The saturable parts
of the magnetic path are well coupled with the windings, whereas the air gap exhibits neither
saturation nor core losses. In case of the air gap, the small central magnetizing inductance is
present. This is the two windings transformer model build on the pot cores using in non-
contact rotational axis power systems.
To simplified the analysis and obtain parameters of transformer Π - model, the parallel
connected permeances 1/Rpc, 1/Rsc, 1/Ra can be added:
pcapc RRRP 111
12 ++= (3.28)
Thus, the model from the Figure 3.13 can be transformed to Fig. 3.14.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 29 -
The leakage permeances of primary and secondary winding respectively, are obtain by
2223
111 P
RP
a
== (3.29)
N1P11 N1P22
N1P12
I1 N2/N1 I2
Fig. 3.14. Permeance based T – model of transformer.
This model is scaled, multiplied by primary turns N1 as the reference winding, in order to
remove N from the current source, thereby leaving only the winding current I. To keep
constant magnetic fluxφ , the current source is multiplied by 1/N1 and each of the permeances
is multiplied by N1. Based on Faraday’s low, the winding voltage is given by:
φ⋅= NV (3.30)
In the next step each element of Fig. 3.14 is multiplied by N1 turns. The resulting network in
terms of the winding voltage and the permeances multiplied by N12 is now. Then by using Eq.
(3.23a), this permeances model can be replaced by the inductances based model including
ideal transformer model as it is shown in Fig. 3.15.
1υ 2υ
Fig. 3.15. Inductance model for two winding CET transformer.
The transformer turns ratio is maintained via the use of an ideal transformer. The leakage
inductance L22 can by moved to the secondary side dividing by the square turns ratio n2. As a
result a transformer Π - model of Fig.3.16 is achieved.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 30 -
L12
L22L11
N1 N2
1υ 2υ
1i 2i
Fig. 3.16. Structure of the Π model. Two-winding transformer model including magnetizing inductance L12, primary and secondary leakage inductances L11, L22 and number of turns N1, N2.
3.6 Calculation of Section Reluctance in the Pot Core
Rotatable Transformer.
In this subsection the expression for reluctance of the CET transformer shown in the
Fig. 3.10 are delivered.
)( 21
22
12 rrhR
rc −⋅⋅
=πμ
(3.31)
)( 23
24
34 rrhR
rc −⋅⋅
=πμ
(3.32)
In order to determine the reluctance denoted as Rc23, the active cross section area for the
magnetic flux flow, has to be calculated:
)(2
2323
23
3
2 rrarr
rdraA
r
r −⋅⋅=−
⋅⋅⋅=∫
ππ
(3.33)
)( 23
2323 rra
rrRr
c +⋅⋅⋅−
=πμ
(3.34)
The sum of the core sections reluctances on the main magnetic flux path is:
233412 cccc RRRR ++= (3.35)
Based on the Eq. (3. 32- 33) and the scheme from Fig. 3.10 the primary and secondary sides
reluctances express:
ca
cacscp RR
RRRR+⋅
==23
23 (3.36)
Similarly as reluctance Rc23, the reluctance in the air section (r3-r2) Ra23 can be expressed as:
)()( 230
2323 rraha
rrRa +⋅−⋅⋅⋅−
=πμ
(3.37)

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 31 -
The sum of air gap reluctances between the cores on the main magnetic path is:
Ra = Ra12 + Ra34 (3.38)
where:
)( 21
220
12 rrl
R ga −⋅⋅
=πμ
(3.39a)
)( 23
240
34 rrl
R ga −⋅⋅
=πμ
(3.39b)
As a results of above analysis, the magnetizing inductance expression, for the selected pot
core transformer and air gap path (Rcp + Rcs + Ra), can be written as:
acscp RRRN
RNNL
++==
∑2
2112 (3.40)
and the coupling factor based on Fig. 3.12 can be approximated by following expression:
aacp
a
RRRR
k++
=23
23 (3.41)
When designing a rotatable transformer, based on the pot cores with an air gap in the
centimeter range, the design priority is different from the conventional transformer. In a
power supply with a conventional isolating transformer, the magnetic-core size and,
ultimately, the transformer size are determined by losses. The core losses limit can be set in
absolute terms (in watts) or in terms of temperature rise (12). A temperature rise of 20 ◦C−40
◦C is usually acceptable. Consequently, the appropriate core size is the minimum size that can
handle the required amount of power by satisfying the losses requirement. In the CET
transformers, however, the core size is selected based on the magnetic coupling and the
window area.
Fig. 3.17. Calculated magnetizing inductance

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 32 -
Fig. 3.18. Calculated magnetic coupling factor
As shown in Fig. 3.17-18, the magnetizing inductance (also leakage inductance) and magnetic
coupling factor, primarily depends on the air-gap area (which, for a short air gap, is equivalent
with the magnetic-core area) and its length. So, increasing the core area and keeping the air-
gap length results in coupling factor increase. Furthermore, a larger core window is usually
required to fit the additional copper that handles the excess magnetizing current. As a result,
the core size of a rotating transformer is greater than that of an equally rated ungapped
transformer. Consequently, the design is typically winding-losses limited rather than core-
losses limited [44].
3.7 Measurement of Transformer Parameters
3.7.1 No Load Test
This measurements test assumed that the copper losses are negligible. As result of test
the transformer core losses can be measured (see Fig. 3.19). Additionally also the primary and
secondary inductances can also be measure (see Fig. 3.20 a, b).
1υ
fePP ≅
Fig. 3.19. Transformer no loads test. Measurement of the core losses.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 33 -
a)
1L
b)
2L
Fig. 3.20. No load test of transformer. Measurement primary (a) and secondary (b) self inductances.
3.7.2 Transformer Short Circuit Test
This measurements test assumes that the all transformer losses are caused by the
ohmic resistance of the windings, and the magnetizing inductance is very high. The measured
resistance of the circuit is the sum of primary winding resistance and reflected to the primary
side, secondary winding resistance
2
12121 N
NRRRRR r +=+= (3.42)
1υ
cuPP ≅
Fig. 3.21. Measurement transformer copper losses and winding resistance.
3.7.3 Leakage and Mutual Inductances Measurements In this measurement method the primary and secondary winding of the transformer are
connected in series and inverse series, according to two possible ways of coupling (7) (Fig.
3.22). Based on two measurements inductances, defined as La and Lb in the test:
1221 2MLLLa ++= (3.43a)
1221 2MLLLb −+= (3.43b)

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 34 -
a)
aL
b)
bL
Fig. 3.22. Measurement inductances of the transformer. a) La, inverse series connection, b) Lb, series connection.
and two previously measured self inductances in the no load test (Fig. 3.20), then the mutual
and leakage inductances of the transformer can be figured out.
Appointed results La and Lb can be check by the equation
221ba LLLL +
=+ (3.44)
If the condition given by Eq. (3.44) is met, then the measured values are correct. The absolute
value of difference in that condition, for measured laboratory transformer is shown in the
Fig.6. The mutual inductance can be obtained from Eq. (3.45):
412ba LLM −
= (3.45)
Next the primary and secondary coupling factor can be calculated from:
21
12
LLMk = , (3.46)
and the leakage inductance factor
21
121LL
M−=σ . (3.47)
The factors from Eq. (3.46-47) are obtained only by measurements and no windings turns
ratio n is introduced to calculations. So, the transformer windings coupling factor is
independent of the actual turns ratio. Measured coupling factor of the pot core transformer in
the laboratory model obtained by the above presented method is shown in Fig. 3.23.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 35 -
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
0 2 4 6 8 10 12 14 16 18 20 22 24 26
air gap [mm]
k – coupling factor
Fig. 3.23. Magnetic coupling factor of the pot core transformer
used in the laboratory model, measured (blue line) and calculated (red line)
0 5 10 15 20 25
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
x 10-3
Air gap [mm]
Mag
netiz
ing
indu
ctan
ce [H
]
Fig. 3.24. Magnetizing inductance of the pot core transformer
used in the laboratory model, measured (dashed red line), calculated (blue line)

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 36 -
3.8 Transformer Copper and Core Losses Ratio
The total of transformer power losses consist of copper and core losses. Assuming a
level for copper and core losses a condition at which that level is optimal can be derived.
feCutot PPP += (3.48)
One of the ways core losses modeling is assuming that the losses are proportional to square of
magnetic induction level –B. 2~ BPfe (3.49)
To simplify further analysis, the magnetizing current is neglected. So, the primary and
secondary winding currents are proportional to each other. If the relative number of the turns
ε increases, then the copper losses also increase.
NNN Δ+
=ε (3.50)
where: ε - relative number of the turns, N – turns number, ΔN – change of turns number.
Additionally, if we assume the constant copper volume:
wCuCu lAV = (3.51)
where: ACu – active copper cross section, lw – winding wire length.
So, by increasing relative number of the turns - ε, the copper cross section area is reduced and
the winding resistance increases
[ ]Ω=Cu
wcu
Al
Rρ
(3.52)
where: ρCu – copper conductance.
As result the copper losses increases by ε2. Magnetic induction, however, decreases when the
factor ε increases. According to the Eq. (3.53), the core losses are assumed to decrease in a
quadratic factor ε2. The equation for the total losses can be write as
22
εε fe
Cutot
PPP += (3.53)
Figure 3.25 shows the dependence of Eq. (3.53). The minimal total transformer losses are
achieved when ε = 1. It means that the optimal turns numbers are well designed and have not
to be changed if:
feCu PP = (3.54)
In practice, if the design is not saturation limited, the optimal efficiency and minimum power
losses are obtain when copper losses are equal to the core losses.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 37 -
ε
totP
Fig. 3.25. Transformer per unit total losses as a function of relative turns number.
3.9. Conclusion
In this Chapter an analysis of the transformer modeling and designing was presented.
The presented pot cores magnetic transformer model can be described by equivalent electric
circuit (Fig. 3.16). The magnetizing inductance and the leakage inductances of contactless
power supply system mainly depends on the dimensions of the primary and secondary system
parts, the applying magnetic cores on primary and secondary side and the air gap length. CET
systems are characterized by a large leakage inductances and small magnetizing inductance.
The windings effective resistance is an important parameter that determines the transformer
efficiency and depends on several factors. The length of the windings is a definitive
parameter; however, in a high-frequency converter, phenomena such as the skin and
proximity effects are equally important. Due to the high magnetizing current of a rotating
transformer, the effective resistance becomes critical. Incorporating more winding turns in the
transformer reduces the magnetizing current but increases the windings resistance and vice
versa; if the number of turns are reduced, the magnetizing current increases and the winding
resistance decreases. So, there are an optimum number of turns that results in minimum losses
in the transformer windings.
Summing up it can be said summarized those values of mutual and self inductances of the
CET transformer depends on following parameters:
air gap length between the cores / windings,

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 38 -
used core sizes and material permeability,
turns number of primary and secondary windings,
the active cross section area for the main magnetic flux flow,
length of the magnetic flux path.
The optimal transformer efficiency and minimum power losses are obtained when copper
losses are equal to the core losses (see Fig. 3.25).
Fig. 3.26. The magnetic flux flow for a two values of adjusted air gap length in pot core rotatable transformer with separating cores and adjacent windings.
Fig. 3.27. The magnetic flux flow for a two values of adjusted air gap length in pot core rotatable transformer with separating cores and overlapping coaxial windings.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 39 -
4. Power Converters Used in Contactless Energy Transmission (CET) Systems 4.1 Introduction
Recently, various kinds of soft-switching techniques for switching power converters
have been proposed in order to satisfy the ever-increasing requirements for smaller size,
lighter weight, and higher efficiency [35]. Soft-switching techniques reduce the switching
losses, enabling high-frequency operation and, consequently, reduce the overall system size
(inverter sink, transformer cores). Generally, the soft-switching techniques can be classified
into two groups: zero voltage switching (ZVS) and zero current switching (ZCS). In the
metal-oxide-semiconductor-field-effect-transistors (MOSFET’s) large turn-on losses are
caused by the large output capacitance. For these devices ZVS technique is desirable. In the
IGBT’s transistors the main part of switching loses occurs by turn-off due to the current tail
characteristics and, consequently, the ZCS approaches are desirable for these devices.
Comparing the power transistors IGBT to MOSFET they have higher voltage rating, higher
power density a and lower production cost. Nowadays, the MOSSFET power transistors are
replacing by IGBT for high power application.
In conventional applications transformer is used for galvanic isolation between source
and load, and its operation is based on high magnetic coupling coefficient between primary
and secondary windings. Assumed that two half cores are used, the CET transformers operate
under much lower magnetic coupling factor.
Fig. 4.1. Rotatable transformer with adjustable air gap (lg).
As a result the main inductance L12 is very small whereas leakage inductances (L11, L22) are
large, comparing them with conventional transformers. Consequently, the increasing
magnetization current causes higher conduction losses. Also, winding losses increase because

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 40 -
of large leakage inductances. Another disadvantage of transformers with relatively large gap
is EMC problem (strong radiation). To minimize the above disadvantages of CET
transformers several power converter topologies have been proposed which can be classified
in following categories: the flyback, resonant, quasi-resonant and self-resonant [9]. The
common for all these topologies is that they all utilize the energy stored in the transformer. In
this work resonant soft switching technique has been used. From Fig.4.2 is clearly to see that
inductive coupled CET system is based on resonant converters and large air gap transformer.
Energy is transmitted without galvanic contact via inductive coupling between windings
placed on separated rotatable parts of a core of a single phase transformer.
Switch mode DC/DC converters with galvanic insulation are widespread used for
power supplies in different applications. The various kinds of soft-switching techniques for
switching power DC/DC converters have been developed in order to satisfy the ever-
increasing requirements for reduction size, volume and weight compared to systems with a
low frequency transformer. Additionally they offer much more flexibility by applying of such
a critical system as electric vehicles battery chargers, in aerospace, biomedical and robotics
applications etc. [11, 12, 15, 17, 23-26, 28-29, 33-35, 40, 43, 48, 56].
Fig.4.2. Block diagram of contactless energy transmission system
Hence, the next Section is devoted to resonant conversion technique.
4.2 Basic Principles of Resonant Converters
4.2.1 Resonant Converters Topologies
Resonant power converters contain resonant L–C networks, called also resonant
circuit – RC or resonant tank network, whose voltage and current waveforms vary
sinusoidally during one or more subintervals of each switching period (1). These converters

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 41 -
contain low total harmonic distortion because switching frequency is equal to first harmonic
frequency.
Resonantcircuit
Cs
Cp
L
L
)(2 tu
)(2 ti)(1 ti
)(1 tu
DCsource
Ez
SNRC
S1
S2Re
Switchnetwork
Fig.4.3 a) The basic structure of resonant inverter SN - switch network and RC - resonant circuit.
zE−
zEπ4
)(1 tu
Fundamentalcomponent
zE
1ϕ
tsω)(1 ti
)()1(1 tu
Fig.4.3 b) Basic waveforms in resonant inverter of Fig.4.4c,
u1(t) - square wave output voltage of switch network and it’s fundamental component i1(t) - fundamental primary current.
A switching network (Fig.4.3a) produces a square wave voltage u1(t) (Fig.4.3b), which
spectrum contains fundamental plus odd harmonics and feed the resonant circuit RC.
Depending on the used converter topology (Fig. 4.4) square wave voltage u1(t) can be
expressed in Furrier series as:
-for Fig. 4.4 a) and b) topologies:
( )tnn
Etu sn
z ωπ
sin12
4)(...5,3,1
1 ∑=
⋅= (4.1)
-for Fig. 4.4 c) topology:
( )tnn
Etu sn
z ωπ
sin14)(...5,3,1
1 ∑=
⋅= (4.2)

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 42 -
a) )(1 tu)(1 ti
)(2 tu
)(2 ti)(1 ti
tsω
1U
ST
zE
b)
DCsource
Ez
)(1 tu)(1 ti
Resonant circuit
Cs
Cp
L
L
)(2 tu
)(2 ti)(1 tiRC
Re
SN
Switch network
T1
T2
2zE
tsω
1U
ST
2zE
c) )(1 tu)(1 ti
)(2 tu
)(2 ti)(1 ti
tsω
1U
ST
zE
Fig.4.4 Basic topologies of series resonant converter and resonant circuit voltage u1(t) waveforms.
a) half-bridge uni-polar converter, b) half-bridge bi-polar converter, c) full-bridge converter.
The full bridge (Fig. 4.4c) inverter composed by four switches and the resonant circuit are
commonly used in high power application. The half bridge inverter (Fig. 4.4a) has only two
switches and two others can be replaced by capacitors (Fig. 4.4b).
The RC resonant frequency f0 is tuned to the fundamental component of u1(t) and is equal to
the inverter switching frequency fs. Therefore, it can be defined as follows:
πω2
ssf = (4.3)

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 43 -
rr CLf
⋅==
ππω
21
20
0 (4.4)
where Lr and Cr - resonance inductance and capacitance of the RC circuit.
The fundamental component of the primary voltage u1(t) is expressed as:
( ) ( )tUtEtu ssz ωω
πsinsin4)( )1(1)1(1 =
⋅= (4.5)
If the switch network SN operates with the resonant frequency f0, the primary current i1(t) is
well approximated by a sinusoidal waveform of amplitude I1 and phase ϕ1. Value of the
primary side RC current i1(t) is equal to the source input dc current Is.
By changing the switching frequency fs in respect to the resonant frequency f0, the magnitude
of voltage u0(t), currents i1(t) and i0(t) can be controlled continuously. Such a phase shift
control of resonant circuit RC can also be used for control of voltage and current magnitude.
The DC/DC resonant converter shown in Fig.4.4 consists of three main components: switch
network (SN), resonant circuit (RC) and rectifier network (RN) with low-pass filter (FN).
RN
Rectifiernetwork
Low-passfilter network
FN
Ro)(0 tu
+
-
)(0 ti
Rectifier withfiltering part
Resonant circuitand
magnetic system
Cs
Cp
L
L
)(2 tu
)(2 ti)(1 ti
)(1 tu
DCsource
Ez
SN
RC
S1
S2
Switchnetwork
)(tiR
)(tiR
Co
Co
Lf
Fig.4.5 The DC/DC full bridge resonant converter circuit model build on fundamental components.
The sinusoidal tank output current iR(t) is rectified by a diode bridge rectifier, and next
is filtered by a low-pass filter with large capacitor C0. Filtered dc voltage and current fed dc
load R0. Harmonics of the switching frequency are neglected, and the thank waveforms are
assumed to be purely sinusoidal. This allows simple equivalent circuits to be derived for the
bridge inverter, thank, rectifier, and output filter parts of the converter, whose operation can
be understood and solved using standard linear AC analysis. This intuitive approach is quite
accurate for operation in continuous conduction mode with high Q-factor response, but

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 44 -
becomes less accurate when the resonant circuit RC is operated with a low Q-factor or for
operation of DC/DC resonant converters in or near discontinuous conduction mode (1).
The main advantage of resonant technique is reduction of switching losses, via
mechanism known as Zero Current Switching (ZCS), and Zero Voltage Switching (ZVS) (1,
2). The switch-on and/or switch-off converter semiconductor components can occur at zero
crossing of the resonant quasi-sinusoidal waveforms. This eliminates some of the switching
loss mechanism. Hence, switching losses are reduced, and resonant converters can operate at
switching frequencies that are considerably higher than in comparable PWM hard switching
converters. ZVS can also eliminate or reduce some of the electromagnetic emission sources
called also as Electromagnetic Interference (EMI) (1). Another advantage is that both ZVS
and ZCS converters can utilize transformer leakage inductance and diode junction capacitors
as well as the output parasitic capacitor of the power switch (2).
However, resonant converters exhibit several disadvantages. Although, the
components of resonant circuit RC can be chosen such that good performance with high
efficiency is obtained at a single operating point, typically it is difficult to optimize the
resonant components in such way that good performance is obtained over a wide range of
load currents and input voltages variations. Significant currents may circulate through the tank
components, even when the load is removed, leading to poor efficiency at light loads. Also, a
quasi-sinusoidal waveforms of resonant converters exhibit greater peak values than in the
rectangular waveforms of PWM converters, under assumption that the PWM current spikes
due to diode stored charge are ignored. For these reasons, resonant converters exhibit
increased conduction losses, which can offset their reduced switching losses. Moreover,
the ZVS and ZCS techniques require variable frequency control to regulate the output power.
This is undesirable since it complicates the control circuit and generates EMI harmonics,
especially under large load variations.
4.2.2 The Compensation Leakage Inductances in CET System
The CET system shown in Fig. 4.2 assures electrical energy transmission from a
power supply via an air gap towards a load. The primary transformer side is fed by a high
frequency inverter while a secondary feeds the DC load via a rectifier. By the use of the air
gap leads to a safe electrical energy transfer without any electrical or physical contact
between the power supply and the load. Because of the separation transformer cores, the

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 45 -
leakage inductances increase. Additionally, a large air gap causes a low magnetizing
inductance. In consequence there are significant winding losses due to strong magnetizing
current. The most suitable converter for this type of contactless energy transmission are
resonant converters. In the resonant converter the, RC drives a resistive load as in Fig. 4.3a.
The reactive component of the load impedance, if any, can be effectively incorporated into the
resonant circuit RC. Figure 4.5 shows resonant dc-dc converter. The resonant circuit is
connected to an uncontrolled rectifier network RN, filter network FN and load R0. The
resonant capacitance Cr (in the Fig. 4.5 shows as Cs, Cp) inserted to the system circuit causes,
those leakage inductances of the CET transformer winding becomes resonant inductances Lr.
To form resonant circuits, two methods of leakage inductances compensation can be
used: S-series or P-parallel giving four basic topologies [56]: SS, SP, PS, and PP (first letter
denotes primary and second a secondary compensation respectively).
Series – Series (SS)
Series – Parallel (SP)
Parallel – Series (PS)
Parallel – Parallel (PP)
L12
L22L11
N2
Cr1 Cr2N1
k
Fig. 4.6. SS – compensation topologies.
L12
L22L11
N2
Cr1
Cr2
N1
k
Fig. 4.7. SP – compensation topologies.
L12
L22L11
N2
N1
kCr1
Cr2
Fig. 4.8. PS – compensation topologies.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 46 -
L12
L22L11
N2
Cr2
N1
kCr1
Fig. 4.9. PP– compensation topologies.
The parallel compensated primary transformer winding is required to generate large primary
current. This causes that PS and PP topologies require an additional series inductor to regulate
the inverter current flowing into the parallel resonant circuit. This additional inductor increase
EMC distortion and total cost of CET system. Therefore, only SS and SP topology has been
considered in this work.
)(1 ti )(2 ti
αZ
)(1 tu
)(sH
)(tiR
Fig. 4.10. Resonant converter circuit model build on fundamental components.
For transfer electric energy through the air gap transformer in CET system with high
efficiency, a high voltage gain with small variation and small circulating current through
magnetizing inductance is preferred. The important variable for the circuit analysis are:
total impedance of considered circuit Zα ( Fig. 4.10),
the normalized angular frequency ω, describing the ratio between operating frequency
ωs and the circuit resonance frequency ω0; ω = ωs / ω0,
the circuit quality factor Q.
In order to study analytically the contactless energy transmission system presented in this
work, the first harmonic method is used.
4.2.3 Analysis of Series-Series Resonant Converter
The series resonant DC/DC converter with series – series SS compensated resonant
circuit is presented in Fig.4.11. The sinusoidal tank output current feeds the rectifier network
RN. Next the current iR(t) is filtered by a large capacitor C0.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 47 -
Filtered dc current i0(t) and voltage u0(t), which contains negligible numbers
harmonics of switching frequency, fed connected dc load (R0). Therefore, by approximation
we can write u0(t) ≈ U0 and i0(t) = I0. Figure 4.12 shown the behavior of voltage u2(t) and
current i2(t) of the secondary side transformer.
)(0 tu
)(0 ti
)(2 tu
)(1 ti
)(1 tu
)(tiR
)(tiR
)(2 ti
αZ βZ γZ
Fig. 4.11. Equivalent circuit of SS resonant converter shown in Fig.4.4
0U
0U−
)(2 tu
)(2 ti2ϕ
tsω
04 Uπ
Fig. 4.12. Waveforms in circuit of Fig.4.11.
Square wave voltage u2(t) and current i2(t) of secondary transformer side.
The secondary side voltage u2(t) change the sign when the secondary side current i2(t) passes
through zero. Hence, the rectifier input voltage is a square wave, equal to +U0 for positive
and –U0 for negative current i2(t) appropriately.
If the current i2(t) is sinusoidal with peak amplitude and phase shift ϕ2, then the fundamental
component is expressed as:
( )2)1(2)1(2 sin)( ϕω −= tIti s (4.6)
Expending the secondary side voltage u2(t) in Fourier series yields:

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 48 -
( )2...5,3,1
02 sin14)( ϕω
π−
⋅= ∑
=tn
nUtu s
n (4.7)
The fundamental secondary voltage component u2(1)(t) could by written as:
( ) ( )2)1(220
)1(2 sinsin4)( ϕωϕωπ
−=−⋅
= tnUtnUtu ss (4.8)
The sinusoidal tank output current i2(t) is rectified by a diode bridge rectifier, and next is
filtered by a large capacitor C0. Hence, the dc component of |i2(t)| is equal to load current I0.
( ) )1(222
0 )1(22sin2 IdttI
TI s
T
so
s
πϕω =−= ∫ (4.9)
Therefore, the load current I0 and the secondary side current i2(t) in steady state conditions are
directly related. Substitution of (4.8) into (4.7) gives expression for the effective load
resistance yields as:
02
0
)1(2
)1(2 8)()(
IU
titu
Res π== (4.10)
oI)(tiR
)(2 tuRI
π2
Fig. 4.13. An effective load resistance of SS compensated converter.
A simplified equivalent circuit for the SS compensated resonant converter given in Fig.4.14 is
similar to the model for SS compensation topology presented in Fig.4.11. However, in the
equivalent model the rectifier network with low pass filter is replaced by an effective
resistance Res equal to 81% of the actual load resistance R0 = U0 / I0.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 49 -
Impedances of SS – Compensated Resonant Converter
αZ βZ γZ
)(1 tu
)(1 ti
)(2 ti
)(tiR
)(
2t
u
Fig. 4.14. Simplified equivalent circuit for SS – compensated resonant converter.
The circuit impedances shows on Fig.4.14 can be written as fallowing equations if
transformer inductances can be obtain from Eq. (3.18):
-impedance of secondary side in case of chosen series compensation
( )⎩⎨⎧
+⋅
+⋅−⋅= esr
RCj
LkjZ2
211
ωω (4.11)
-reflected secondary impedance seen from primary side can be fund by dividing reflected
voltage by primary current:
2
2
1
2'2 Z
ZI
IZZ MM =
⋅= (4.12)
with LkjZM ⋅⋅= ω (4.13)
tsω
tsω
tsω
tsω
Fig. 4.15. Simulation results: primary voltage source (u1), secondary voltage (u2), primary current (i1)
and secondary current (i2) for zero primary current switching mode and two load resistance values R1, R2.
Thus the reflected secondary side impedance for SS compensation can be expressed as:
⎪⎪⎩
⎪⎪⎨
⎧
⋅⋅+−−⋅⋅⋅−−⋅⋅⋅⋅⋅⋅⋅
−
⋅⋅+−−⋅⋅⋅⋅⋅⋅⋅
=
222
222
22
2222
3
222
222
2
2222
4
'2
)1)1(()1)1((
)1)1((
esrr
rr
esrr
esr
RCkLCkLCLkCj
RCkLCRLkC
Z
ωωωω
ωωω
(4.14)

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 50 -
In the Fig. 4.15 are shown the simulation result waveforms of primary source voltage (u1),
primary current (i1) and secondary current (i2) for zero primary current switching mode. The
oscilograms were simulated for the same resonant circuit parameters and different loads
resistances R02 > R01. The loading effect of the secondary on primary circuit is corresponding
to reflected impedance '2Z .
a)
b)
Fig. 4.16.1. Real and imaginary component of reflected secondary impedance '
2Z for SS -compensation mode, as a function of operating frequency and load resistance. k = 0.247
a) Reflected resistance )Re( '2Z , b) Reflected reactance )Im( '
2Z
The power transfer from primary side trough the air gap to secondary side can be expressed
as a function of reflected resistance multiplied by the square of primary current: 2
1'2 )Re( IZP ⋅= (4.15)
Therefore, even with low coupling coefficient – k of CET transformer, the high electric power
can be transferred, if the circuit is working with the secondary current resonant frequency and
primary winding resonant frequency is equal to secondary. In order to ensure that condition
primary resonant capacitor should be chosen depending on the compensation topology.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 51 -
a)
b)
Fig. 4.16.2. Real and imaginary component of reflected secondary impedance '
2Z for SS - compensation mode, as a function of operating frequency and load resistance. k = 0.526
a) Reflected resistance )Re( '2Z , b) Reflected reactance )Im( '
2Z
The required resonant capacitors values, for desired resonant frequency, can be expressed as
follows:
- for series secondary compensation - SS
22112211
221 LLrrr CC
LLC === (4.16)
- for parallel secondary compensation - SP
( ) 222211222112211
2222
1 11
rLLr
r CkLLkLL
CLC−
==⋅⋅−⋅
⋅= = (4.17)
The above equations are illustrated in Fig. 4.17. The normalized value of the primary capacitance should to be unity:
11
222
11
LLC
CCr
rnr ⋅= (4.18)
Therefore, by combining the primary and secondary tank networks, the total impedance seen
by the power supply for a series compensated primary system can be written as:

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 52 -
( )⎩⎨⎧
+⋅
+⋅−⋅= '2
1
11 ZCj
LkjZrω
ωα (4.19)
123456789
10
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Magnetic coupling coefficient - k
SP
SS
21 rr CresultC ⋅=
21 2 rr CC ≈example: for k = 0.7
Fig. 4.17. Primary capacitance for SS and SP compensation versus coupling coefficient.
The phase angle of the total impedance seen by the power supply for the SS - compensation
topology versus normalized frequency fs/fo, for a different values of load resistance R0 are
shown in Fig. 4.18. a)
b)
Fig. 4.18. Phase angle of the total impedance seen by the power supply for a SS - compensation versus
normalized frequency fs/fo, for a different values of load resistance R0. Computing circuit parameters:
a) k = 0.247, Cr1 = Cr2=63 nF, L=296 uH b) k = 0.52, Cr1 = Cr2=63 nF, L=372 uH

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 53 -
Summing up, operation at the secondary resonant frequency depends on selected
compensation topology, the coupling coefficient between primary and secondary, and the
quality factor of secondary circuit.
4.2.4 Analysis of Series-Parallel Resonant Converter
The series - parallel (SP) compensated resonant circuit is shown in Figure 4.19. The
main deferens between SP and SS compensation topology is that resonant capacitor Cr2 is
parallel connected to the output rectifier. Moreover, the output low-pass filter consists of
additional inductor Lf. In SP resonant converter the output rectifier is supplied by nearly
sinusoidal voltage resonant capacitor uCr2(t). The diode rectifier is switching (Fig.4.20) when
the voltage uCr2(t) passes through zero.
)(0 tu
)(0 ti
)(2 tuCr
)(1 ti
)(1 tu
)(tiR
)(tiR
)(2 ti
αZ βZ γZ
Fig. 4.19. An equivalent circuit of SP resonant converter
In steady-state conditions the filter inductor current |iR(t)| is equal to the dc load current I0.
The input current of the rectifier iR(t) is therefore a square wave of amplitude I0 (Fig.4.19) and
is in phase with the resonant capacitor voltage uCr2(t). The iR(t) current can be expressed in
Furrier series as:
( )Rsn
R tnn
Iti ϕωπ
−⋅
= ∑=
sin14)(...5,3,1
0 (4.20)
where ϕR is the phase shift of voltage uCr2(t) (Fig.4.19).
The fundamental component of rectifier input current is:
( )RsR tIti ϕωπ
−⋅
= sin4)( 0 (4.21)
The effective load resistance representing the output rectifier yields as:

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 54 -
)1(
)1(2
)1(
)1(2
4)()(
R
Cr
R
Crep I
Utitu
Rπ
== (4.22)
The AC components of the rectifier resonant capacitor voltage |uCr2(t)| are removed by the
output low pass filter. In steady state, the output voltage Uo is equal to the DC component of
voltage |uCr2(t)|:
( ) )1(2
2
0)1(2
2sin2CrRs
T
Crs
o UdttUT
Us
πϕω =−= ∫ (4.23)
Fundamentalcomponent
tsω
0I
0I−
04 Iπ
)(2 tuCr
)(tiRRϕ
Fig. 4.20. Waveforms in SP resonant converter of Fig. 4.19. Fundamental components voltage uCr2(t) and current iR(t).
oI)(tiR
)(2 tuCr
22
CrUπ
Fig. 4.21. Equivalent circuit of the output rectifier of SP compensated converter.
Therefore, the load voltage Uo and the resonant capacitor voltage uCr2(t) in steady state
conditions are directly related.
Substitution of (4.23) into (4.22) yields expression for the effective load resistance:
ooep RRR ⋅== 23,18
2π (4.24)
An equivalent circuit for the SP compensated resonant converter shown in Fig.4.22 is similar
to the model for SS compensation topology presented in Fig.4.14. However, the roles of the

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 55 -
rectifier input voltage and current are interchanged and therefore the effective resistances Res
and Rep values are different.
Impedances of SP – Compensated Resonant Converter
ReL12
L22L11
N2
Cr1N1
k
jX1 jX2
jXm
αZ βZ γZ
Cr2
δZ
)(tiR)(2 ti)(1 ti
)(1 tu
Fig. 4.22. Simplified equivalent circuit of SP resonant converter from Fig.4.19.
From Fig. 4.20 the circuit impedances can be written as follows:
-impedance of secondary side in case of chosen series compensation
( )⎪⎩
⎪⎨
⎧
+⋅+⋅−⋅=
epr RCj
LkjZ 111
22 ω
ω (4.25)
tsω
tsω
tsω
tsω
Fig. 4.23. Simulation results: primary voltage source (u1), secondary voltage (u2), primary current (i1)
and secondary current (i2) for zero primary current switching mode and two load resistance values.
-reflected secondary impedance seen from primary side can be fund by dividing reflected
voltage by primary current:
2
2
1
2'2 Z
ZI
IZZ MM =
⋅= (4.26)
with LkjLjZM ⋅⋅=⋅= ωω 12 (4.27)
Thus, the reflected secondary side impedance for parallel compensation can be stated as:

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 56 -
⎪⎪
⎩
⎪⎪
⎨
⎧
−⋅⋅+−−⋅⋅⋅⋅−⋅+−−⋅⋅⋅⋅⋅⋅⋅⋅
−
−⋅⋅+−−⋅⋅⋅⋅⋅⋅⋅
=
22222
222
222
223
22222
22
222
'2
)1()1)1(())1()1)1(((
)1()1)1((
kLkLCRkLkLCRCLk
j
kLkLCRRLk
Z
rep
repr
rep
ep
ωωωω
ωωω
(4.28)
a) b)
Fig. 4.24. Real and imaginary component of reflected secondary impedance '
2Z for SP compensation mode, as a function of operating frequency and load resistance. k = 0.247
a) Reflected resistance )Re( '2Z , b) Reflected reactance )Im( '
2Z
The total impedance Zα seen from the power supply is close to zero when the circuit is in
resonance and voltage gain is almost constant and independent of the load variety.
( )⎩⎨⎧
+⋅
+⋅−⋅= '2
1
11 ZCj
LkjZrω
ωα (4.29)

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 57 -
a) b)
Fig. 4.25. Real and imaginary component of reflected secondary impedance '
2Z for SP compensation mode, as a function of operating frequency and load resistance. k = 0.52
a) Reflected resistance )Re( '2Z , b) Reflected reactance )Im( '
2Z
4.2.5. Summary and Conclusions In this subsection basic topologies of CET transformer leakage inductances compensation
methods have been analyzed. The contactless power supply system essentially is comprised of
two magnetically coupled electrical systems, as shown in Fig. 4.4, driven by a high-frequency
switching power supply. A significant problem of CET system is the large secondary leakage
inductance, which causes a voltage drop and limitation of the transfer power range.
Consequently, the secondary winding (rotatable - movable pickup) compensation is required
to enhance the power transfer capability. The leakage inductance of primary winding is
normally compensated in order to minimize the VA rating of the supply. The compensation
can be realized either by series resonance capacitor or by parallel resonance capacitor
connected at the secondary transformer winding (see basic compensation circuits at Fig. 4.6-
9). Depending on the selected compensation topology the impedance of secondary network is
changing (Table 4.1). The performed analysis shows the main differences between the two
commonly used resonant topologies.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 58 -
a)
b)
Fig. 4.26. Phase angle of the total impedance seen by the power supply for SP compensation versus normalized frequency fs/fo for a different values of load resistance R0.
Computing circuit parameters: a) k = 0.247, Cr1 = Cr2=63 nF, L=296 uH
b) k = 0.52, L=372 uH
Resonant frequency is increasing at parallel compensation and decreasing at series
compensation when the load resistance increases. Changes of the load resistance have an
influence on resonant frequency primary current. Moreover, the values of reflected
impedances are strongly depended on coupling coefficient for both compensation topologies,
and decreasing when the coupling coefficient is lower. By comparing the phase shift
characteristic of the total impedance for the both compensation topologies, we can see that
the SS compensation circuit is more sensitive to the load resistance changes at the same
circumstances. While the SS compensation is very sensitive to the coupling factor changes
and need a different resonance capacitances by the coupling changing. In both presented
topologies with increasing load resistance the phase shift between primary and secondary
currents increase as well as output voltage. It can be summarized as fallows: series – parallel
(SP) compensated converter exhibits some advantages to the series – series (SS) resonant
converter only for application when coupling factor is constant.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 59 -
Table 4.1 Secondary Circuit Properties as a Function of Compensation Topology.
Compensation topology Series Parallel
Secondary impedance
( ) esr
RCj
Lkj +⋅
+⋅−⋅2
11ω
ω ( )ep
r RCjLkj 1
112 +⋅
+⋅−⋅ω
ω
Reflected resistance 22
222
22
2222
4
)1)1(( esrr
esr
RCkLCRLkC
⋅⋅+−−⋅⋅⋅⋅⋅⋅⋅ωω
ω 22222
22
222
)1()1)1(( kLkLCRRLk
rep
ep
−⋅⋅+−−⋅⋅⋅⋅
⋅⋅⋅
ωωω
Reflected resistance at the secondary
resonant frequency esRLk 222 ⋅⋅ω
222
22
)1( kLRLk ep
−⋅⋅
⋅⋅
ω
Reflected reactance 22
222
22
2222
23
)1)1(()1)1((
esrr
rr
RCkLCkLCLkCj⋅⋅+−−⋅⋅⋅−−⋅⋅⋅⋅⋅⋅⋅
−ωω
ωω2222
222
222
2223
)1()1)1(())1()1)1(((
kLkLCRkLkLCRCLk
jrep
repr
−⋅⋅+−−⋅⋅⋅⋅
−⋅+−−⋅⋅⋅⋅⋅⋅⋅⋅−
ωωωω
Reflected reactance at the secondary
resonant frequency 0
)1(
22
kLLk
−⋅⋅⋅
−ω
Secondary circuit quality factor
esRLk ⋅−⋅ )1(ω
LkRep
⋅−⋅ )1(ω
Load resistance oes RR 28π
= oep RR8
2π=
The advantages of a series compensated secondary is that there is no reflected reactance
when the secondary operates at the resonant frequency, while the parallel compensated
secondary reflects a capacitive reactance at the secondary resonant frequency. The favorably
characteristic of parallel compensated secondary is mainly because it is independent of the
connected load. Parallel secondary compensation, which gives a current source output, is
well suited for the applications such as a battery charging (electric vehicles). However, series
secondary compensation topology, is better for systems with intermediate DC voltage bus,
such as PWM-controlled converter feds variable speed AC drives (robotics). In this case
compensation topology should be selected suitable according to outputs requirements.
Theoretically, SS is the best topology, as the primary capacitance is then independent of either
the magnetic coupling or the converter load. The other three topologies (Table 4.2) are all
dependent on the magnetic coupling. In this work, however, we assume that magnetic
coupling factor between CET transformer windings will be changed in case of operation with
different air gap length. Therefore, in the next Subsection 4.4 only variants of SS
compensation circuits will be considered.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 60 -
Table 4.2. Variations of Circuits Leakage Inductance Compensation
/ Simplified circuits Abbreviation Comments Sensitivity for coupling and load changes
1 L12
L22L11
N2
Cr1 Cr2N1
k
Series - Series SS
systems with intermediate
DC voltage bus
sensitive for load changes
2 L12
L22L11
N2
Cr1
Cr2
N1
k
Series - Parallel SP
(current source output) battery
charging
sensitive for coupling changes
3 L12
L22L11
N2
N1
kCr1
Cr2
Parallel - Series PS
systems with intermediate
DC voltage bus
sensitive for coupling changes
4 L12
L22L11
N2
Cr2
N1
kCr1 Parallel - Parallel PP
(current source output) battery
charging
sensitive for coupling changes

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 61 -
4.3. CET System with Series Topology Compensation
In previous chapter the analytical analysis of series-series (SS) and series-parallel (SP)
compensated resonant converter used in CET systems have been presented. It was proven
that for contactless power supply system with variable coupling factor series compensation
topology is preferable.
The series compensation topology of the CET system can by divided on three types
(Table 4.3.):
the series resonant circuit made by connection resonant capacitor to the primary
transformer winding,
the series resonant circuit made by connection resonant capacitor to the secondary
transformer winding,
the series resonant circuit made by connection resonant capacitors to the primary
and secondary transformer windings.
The SS compensation circuit can be divided in three variants (Tab. 4.1.)
Table 4.3. Variations of Series Circuits Leakage Inductance Compensation
/ Simplified circuits Abbreviation
1
Series - Series S1
2
Series - Series S2
3
Series - Series SS

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 62 -
4.3.1. CET System with Secondary Compensation
The concept of leakage inductances compensation of the CET transformer by adding
series resonant capacitor on secondary side is discussed in following literature, e.g. [2, 3, 4].
)(0 tu
)(0 ti
)(2 tu
)(1 ti
)(1 tu
)(tiR
)(tiR
)(2 ti
Fig. 4.27. CET system with secondary series compensation S2
The resonant circuit RC with S2 compensation topology of contactless energy transmission
system shown in Fig.4.27 is feed by U1 square voltage source. The primary winding of
transformer is directly connected to the output of converter. In this case the transformer is not
protected by the DC-component of primary current flow. The secondary winding is connected
with series resonant capacitor and rectifying circuit RN with capacitance filter C0 and dc load
R0. The operating frequency sf of the resonance converter should be equal or close to
resonance frequency of secondary circuit. However, to increase system efficiency, operating
frequency of supply converter is adjusted to ensure zero current switching. The phase shift
(phase error) between square wave voltage u1(t) and primary current i1(t), is a parameter
which can be detected by a control circuit on primary side.
Assuming the same numbers of primary and secondary winding N1 = N2, the leakage
inductances can be described as:
LkLL )1(2211 −== (4.30)
Resonance frequency of circuit shown in Fig.4.27 including rectifying circuit with
capacitance filter can be express as:
( ) ( ) 020 12
112
121
LCkLCkf
r −+
−=
π (4.31)
However 20 rCC >> , and the resonance frequency can be written as:

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 63 -
( ) 20 12
121
rLCkf
−≈
π (4.32)
The frequency of supply voltage u1(t) can be lower, equal or higher then resonant frequency
fo. The values of resonance converter output voltage and rectifier input voltage can be
calculated from following equations:
( )
( )⎪⎩
⎪⎨
⎧
−−−=−
+−=
22
22
11
121
21
IC
jIkLjILkjU
IkLjILkjU
rm
m
ωωω
ωω (4.33)
The magnetizing inductance current is equal to:
21 IIIm −= (4.34)
From the equations (4.33) and (4.34) it follows that, value rectifier input voltage can be
written as:
( ) ( ) mrr
IC
LkjIC
LkjUU ⎟⎟⎠
⎞⎜⎜⎝
⎛−−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−−−=
ωω
ωω 1211212 112 (4.35)
The waveform of magnetizing current mi has triangular shape and is phase shifted to the
primary voltage u1(t) by an angle πϕ21
−= . The magnetizing current frequency is equal to
operating frequency of resonant converter. The value of the voltage drop on the reactance XLC
as a result of first harmonic magnetizing current flow 2)1()1(
πj
mm eII−
= are defined as:
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−−−==
−−
rm
j
LC
j
mI CLkIeXeIU
m ωω
ππ 121)1(22
)1()1( (4.36)
Depending on the operating frequency changes above or below resonance frequency, the
series reactance XS2 of tank network character is volatile.
( )r
S CLkX
ωω 12122 −−=
⎪⎩
⎪⎨
⎧
>=<
0
0
0
ffffff
S
S
S
- capacitive character
0 (4.37)
- inductive character

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 64 -
a) 0ffs =
tsω
tsω
b) 0ffs >
tsω
tsω
c) 0ffs <
tsω
tsω
Fig. 4.28. Simulated basic waveforms of currents and voltages in contactless energy transmission system S2 - compensation.
The values of the voltage drop on the reactance XS2 as a result of flow first harmonic primary
current are defined as:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
=
=
⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ −−
22)1(1
22)1(1
22)1(1
22)1(1
)1(1 0π
ϕπϕ
πϕπ
ϕ
j
S
j
Sj
j
S
j
Sj
I
eXIeXeI
eXIeXeI
U
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
>
=
<
0
0
0
ff
ff
ff
S
S
S
(4.38)
From (4.34) and (4.38) it follows that, value of secondary side voltage can be approximated
by the following expression:
( ) ( ) ( ) ( )
( ) ( )
( ) ( ) ( ) ( )⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛−−−⎟⎟
⎠
⎞⎜⎜⎝
⎛−−+−
⎟⎟⎠
⎞⎜⎜⎝
⎛−−−
⎟⎟⎠
⎞⎜⎜⎝
⎛−−−⎟⎟
⎠
⎞⎜⎜⎝
⎛−−++
=
rm
r
rm
rm
r
CLktI
CLktIu
CLktIu
CLktI
CLktIu
u
111)1(
111)1(11
111)1(1
11)1(1
11)1(11
2
121sin1212cos
121sin
121sin1212cos
ωωω
ωωϕω
ωωω
ωωω
ωωϕω
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
>
=
<
0
0
0
ff
ff
ff
S
S
S
(4.39)

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 65 -
From presented simulation results Fig.4.28 and equation (4.39) follows that independent of
the operating converter frequency, the value of the output voltage is reduced by the voltage
drop caused by magnetizing current. If we assume the same numbers of primary and
secondary winding coils, the value of rectifying output voltage U0 is lower than feeding
voltage Ez for any values of load resistance.
4.3.2 CET System with Primary Compensation
The concepts of leakage inductances compensation of the CET transformer by adding series
resonant capacitor on primary side are possible to find in literature e.g. [25, 57, 58].
)(0 tu
)(0 ti
)(2 tu
)(1 ti
)(1 tu
)(tiR
)(tiR
)(2 ti
Fig. 4.29. CET system with primary series compensation S1
The resonant circuit RC with S1 compensation topology of contactless energy transmission
system shown in Fig.4.29 is feed by U1 square voltage source. The primary winding of
transformer is connected in series with resonant capacitor to the output of switch network SN.
Series connected capacitor Cr1, protects the transformer winding against the DC-component of
primary current. To the secondary winding is connected to rectifying network (RN) with
capacitance filter C0 and dc load R0. The operating frequency sf of the SN should be adjusted
to ensure zero current switching. The phase shift (phase error) between square wave voltage
u1(t) and primary current i1(t), is a parameter which can be detected by a control circuit on
primary side. Assuming the same numbers of primary and secondary winding N1 = N2, the
leakage inductances can be written as:
LkLL )1(2211 −== (4.40)
Resonance frequency of circuit shown in Fig.4.29 can be express as:

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 66 -
( ) 10 12
121
rLCkf
−≈
π (4.41)
The values of resonance converter output voltage and rectifier input voltage can be calculated
from following equations:
( )
( )⎪⎩
⎪⎨
⎧
−−=−
−+−=
m
rm
IkLjILkjU
IC
jIkLjILkjU
ωωω
ωω
22
11
11
21
121 (4.42)
From the equations (4.34) and (4.42) it follows that, value of rectifier input voltage can be
written as:
( ) ( ) mr
ILkjIC
LkjUU 211212 112 −+⎟⎟⎠
⎞⎜⎜⎝
⎛−−−= ωω
ω (4.43)
a) 0ffs =
tsω
tsω
b) 0ffs >
tsω
tsω
c) 0ffs <
tsω
tsω
Fig. 4.30. Simulated basic waveforms of currents and voltages in contactless energy transmission system S1 - compensation.
The waveform of magnetizing inductance current mi , if the influence of voltage drop on the
leakage inductance is negligible, has triangular shape. The angle of phase shift mi to the
primary voltage u1(t) is equal πϕ21
−= . The magnetizing current frequency is equal to
operating frequency of resonant converter.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 67 -
2)1()1(
πj
mm eII−
= (4.44)
From the equation (4.45) follows that the voltage drop in case of magnetizing current flow is
combined with its amplitude and leakage inductance of the CET transformer. The sign of this
voltage drop is independent of the operating frequency.
( ) ( )LkILkjjIU mmIm2121 )1()1()1(
−=−⋅−= ωω (4.45)
Depending on the operating frequency changes above and below resonance frequency the
reactance of tank network character is volatile.
( )r
S CLkX
ωω 12121 −−=
⎪⎩
⎪⎨
⎧
>=<
0
0
0
ffffff
S
S
S - capacitive character
0 (4.46)
- inductive character
The value of the voltage drop on the reactance XS1 as a result of first harmonic primary
current flow are defined as:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
=
=
⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ −−
21)1(1
21)1(1
21)1(1
21)1(1
)1(1 0π
ϕπϕ
πϕπ
ϕ
j
S
j
Sj
j
S
j
Sj
I
eXIeXeI
eXIeXeI
U
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
>
=
<
0
0
0
ff
ff
ff
S
S
S
(4.47)
By using equation (4.42 – 47) the value rectifier input voltage can be written as:
( ) ( ) ( ) ( )
( ) ( )
( ) ( ) ( ) ( )⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
−+⎟⎟⎠
⎞⎜⎜⎝
⎛−−+−
−+
−+⎟⎟⎠
⎞⎜⎜⎝
⎛−−++
=
LktIC
LktIu
LktIu
LktIC
LktIu
u
mr
m
mr
21sin1212cos
21sin
21sin1212cos
11)1(1
11)1(11
11)1(1
11)1(1
11)1(11
2
ωωω
ωϕω
ωω
ωωω
ωϕω
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
>
=
<
0
0
0
ff
ff
ff
S
S
S
(4.48)
From the presented simulation results and equation (4.48) follows that independent of the
converter operating frequency, the value of the output voltage increases because of the
voltage drop on leakage reactance caused by magnetizing current. As is shown in Fig. 4.30 for
all operating frequencies the amplitude of output voltage u2 can be higher then amplitude of
the source voltage u1. Therefore, there is no possible to maintain a fixed level of output
voltage, by adjustment of voltage source frequency only. Voltage gain may exceed the
nominal value GV > 1 what is very danger for the load (over voltage).

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 68 -
4.3.3. CET System with Compensation Capacitors
on Both Side of the Transformer
The CET system with resonant circuit created due to connection in series capacitor to
primary or secondary winding of the transformer (Fig.4.27, 4.29) gives very poor possibility
of keeping voltage gain on the constant level during CET operation, with variable coupling
factor and load resistance. In this Subsection CET system solution with compensation
voltages dropping on leakage inductances by adding series resonant capacitors to primary and
secondary windings of transformer is presented. This concept is described literature e.g. [8,
10, 34, 35, 46, 59-66].
)(0 tu
)(0 ti
)(2 tu
)(1 ti
)(1 tu
)(tiR
)(tiR
)(2 ti
Fig. 4.31. CET system with primary and secondary series compensation mode SS.
Resonance frequency which ensures zero current switching conditions for switch network of
the circuit shown in Fig. 4.31 is:
( ) ( ) 00 12
11
121
LCkLCkf
r −+
−=
π (4.49)
If we assume that rCC >>0 , where Cr = (Cr1 + Cr2) is resonant capacitance, the resonance
frequency of the circuit shown in Fig. 4.31 is follows:
( ) rLCkf
−≈
11
21
0 π (4.50)
The output voltage of resonant converter and rectifier input voltage can be express by
following equations:

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 69 -
( )
( )⎪⎪⎩
⎪⎪⎨
⎧
−−−=−
−+−=
21
22
11
11
121
121
IC
jIkLjILkjU
IC
jIkLjILkjU
rm
rm
ωωω
ωωω
(4.51)
Finally the secondary side voltage equation by using Eq.(4.51) can be rewritten as:
( ) ( ) mrr
IC
LkjIC
LkjUU ⎟⎟⎠
⎞⎜⎜⎝
⎛−−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−−−=
ωω
ωω 1211212 112 (4.52)
0ff s =
tsω
tsω
0ff s >
Ts <To
u1 u2
i1
i2
im
Gv < 1tsω
tsω
0ffs <
tsω
tsω
Fig. 4.32. Simulated basic waveforms of currents and voltages
in CET system with SS - compensation.
If the influence of voltage on the leakage inductance is negligible, the waveform of
magnetizing inductance current mi has triangular shape. The angle of phase shifted mi to the
primary voltage u1(t) is equal πϕ21
−= . The magnetizing current frequency is equal to
operating frequency of resonant converter.
2)1()1(
πj
mm eII−
= (4.53)
The value of series reactance for primary current 1I is a function of operating frequency and
is two times larger than reactance seen by the magnetizing current mI .

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 70 -
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−−=
rSS C
LkXω
ω 1212 ⎪⎩
⎪⎨
⎧
>=<
0
0
0
ffffff
S
S
S -capacitive character
0 (4.54)
-inductive character
The value of the voltage drop on the reactance XSS caused by first harmonic primary current is
defined as:
⎪⎪
⎩
⎪⎪
⎨
⎧
=
=
=
⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ −−
2)1(1
2)1(1
2)1(1
2)1(1
)1(1 0π
ϕπϕ
πϕπ
ϕ
j
SS
j
SSj
j
SS
j
SSj
I
eXIeXeI
eXIeXeI
U
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
>
=
<
0
0
0
ff
ff
ff
S
S
S
(4.55)
I this case using equation (4.51 – 4.55) the value of the input rectifier voltage can be written
as:
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛−−−⎟⎟
⎠
⎞⎜⎜⎝
⎛−−+−
⎟⎟⎠
⎞⎜⎜⎝
⎛−−−⎟⎟
⎠
⎞⎜⎜⎝
⎛−−++
=
rm
r
rm
r
CLktI
CLktIu
uC
LktIC
LktIu
u
111)1(
111)1(11
1
11)1(1
11)1(11
2
121sin1212cos
121sin1212cos
ωωω
ωωϕω
ωωω
ωωϕω
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
>
=
<
0
0
0
ff
ff
ff
S
S
S
(4.56)
From the equation (4.56) and simulated results from Fig.4.32 follows that, when primary
voltage source operating frequency 0ff S = , the secondary side output voltage has the same
value and the circuit voltage gain is unity GV = 1. The compensation of the voltage drop on
the leakage reactances is possible only for operation with resonant frequency 0ff S = . The
output voltage can be controlled without measurement and adjustment of supply voltage
amplitude Ez, just by keeping converter voltage in resonance. It is a very favorable case
because control may be very precise and input inverter configuration may be simple (full
bridge or half bridge inverter).
4.3.4. Voltage Gain Behavior of the SS – Compensated Circuit
It was proven that for SS-compensated resonant circuit in CET system, the voltage gain Gv
is unity. It is necessary to explore closer SS compensation topologies by means of voltages
gain expression for variable CET system parameters.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 71 -
To calculate the voltage gain Gv of the SS-compensated circuit, the value of impedance and
reactance (shown at various points in Fig. 4.14) should be derived. For effective transfer
electric energy through the CET transformer, a high-voltage gain with small variation as well
as small circulating current through the magnetizing inductance is important. To achieve these
requirements, the SS-compensated circuit is applied.
The higher turn ratio requires more windings of the secondary side for a given converter
operating frequency, and the lower turn ratio requires high voltage of the input side.
Therefore, the turn ratio of the transformer is considered to unity.
The SS - compensated circuit inductances are expressed as (see Fig. 4.14):
-the inductance seen at the secondary side
esRjXZ +=
2γ (4.57)
above equation can be rewritten as follows:
( )⎪⎩
⎪⎨⎧
+⋅
+⋅−⋅= esRrCj
LkjZS
S
2
11ω
ωγ (4.58)
γ
γβ ZmjX
ZmjXZ
+
⋅= (4.59)
-the inductance seen at the primary side:
βZjXαZ += 1 (4.60)
The reactances X1, X2, Xm are equal to:
1
1111
rCsLsX
ωω −= (4.61)
2
1222
rC
sL
sX
ωω −= (4.62)
MsmX ω= (4.63)
ωs = 2πfs – inverter operation frequency.
The transfer voltage gain of CET system with SS compensation topology from Fig.4.14 is:
γα
βZesR
Z
ZVG = (4.64)
From equations (4.57) to (4.64), the resulting equation for the voltage gain GV can be
expressed as:

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 72 -
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛ ⋅++
+⎟⎟⎠
⎞⎜⎜⎝
⎛+=−
es
m
mV R
XXXXX
jXXG
2121
11 1 (4.65)
21
221
212
11
−
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛ ⋅++
+⎟⎟⎠
⎞⎜⎜⎝
⎛+=
es
m
mV R
XXXXX
XXG (4.66)
It follows from equation (4.66) that GV is unity at resonant frequency, even though the
leakage inductances of the CET transformer are very large. In order to analyze the voltage
gain for frequency variations, Eq. (4.66) should be expressed as a function of frequency. The
compensation frequency ω0 = 2πf0 – (resonance frequency) is calculated for condition X1 =
X2 = 0 as a fallow:
222/1111/1/1 rCLrCLrCrLo ===ω (4.67)
Based on equations (4.61 -67) the expressions for X1 and X2 can be rewritten as follows:
⎟⎟⎠
⎞⎜⎜⎝
⎛−= 2
11111ω
ω LsX (4.68)
⎟⎟⎠
⎞⎜⎜⎝
⎛−= 2
11222ω
ω LsX (4.69)
Where normalized frequency ω is defined as:
os ωωω /= (4.70)
As result of used two halves cores and large air gap, the CET transformer operates under
lower and variable magnetic coupling factor k. It is desirable to express the voltage gain GV in
terms of coupling factor. For simplification we assuming that the configurations of primary
and secondary transformer cores are the same, and Eq. (3.18) is fulfill. Then, by comparing
equations (4.68-69) to (4.66), the voltage gain can be written as function of operating
frequency:
( )22
22211222112
211
/1111111
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛⎟⎠⎞
⎜⎝⎛ −+⎟
⎠⎞
⎜⎝⎛ −+
+⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ −+=
eV R
MLLLL
MLG ω
ωω
ωω
ω (4.71)
By the use Eq. (4.68-69), the voltage gain (4.71) can be rewritten as function of operating

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 73 -
frequency and coupling coefficient:
2
2
2
211
21111111 ⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ −
−+⎟
⎠⎞
⎜⎝⎛ −+⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ −
−+=
ωωω
ω kkQ
kkG acV (4.72)
Where the circuit quality factor for SS compensation topology is:
( )es
r
esac R
LR
LLQ ωω=
+= 2211 (4.73)
The transfer gain of voltage CET system for SP compensation topology is:
γ
δ
α
βZZ
ZZ
VG = (4.74)
where, the equations for component impedance above equation (shown at various points in
Fig. 4.22) can be written as:
esr RCj
Z 11
2 +⋅=
ωδ (4.75)
( ) 21 ZZLkjZ =+⋅−⋅= δωγ (4.76)
The equation (4.74) can by used to compare voltage gain SS and SP compensated CET
system for the same values of the circuit parameters.
The choice of quality factor is an important design parameter. Larger secondary
quality factor increased power transfer capability. The value of primary side quality factor
depends on the geometry primary transformer winding, and the required primary current.
The voltage gain Gv characteristics calculated from equation (4.72) are shown in Fig.4.33
These analytical results are presented for the varying frequency ω, various acQ , and two
different cases of the coupling coefficient. Results show that the curves of voltage gain GV for
the two cases are almost identical except for a small deviation in low circuit quality factor
acQ . Thus, the analytic curves can be used for design and control of the system. From these
curves, the points at unity of the normalized frequency keep a unity gain because the
impedance of the leakage inductances is canceled by the additional capacitors at this
frequency. For this operating frequency the current and the voltage of the resonant converter
are in phase, consequently, reactive power is minimize. As long as the converter operates at
this frequency, the voltage gain GV keeps unity gain, and circulating current through the
magnetizing inductance is suppressed. Furthermore, these characteristics do not depend on
load as well as coupling coefficient.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 74 -
a)
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0.5
1
0→acQ
32=acQ16=acQ8=acQ4=acQ2=acQ1=acQ
ω
vG k=0.2A B C
b)
k=0.6
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0.5
1
0→acQ
32=acQ16=acQ8=acQ4=acQ2=acQ1=acQ
ω
vG
A B C
Fig. 4.33. The dc voltage gain of inductive CET system versus frequency for SS topology compensation.
a) k = 0.2, b) k = 0.6
This frequency, however, varies as the coupling coefficient varies. For the output-voltage
regulation, the feedback control of output voltage should be applied by selecting the desirable
region from three different regions of the voltage gain GV in Fig. 4.33. Range A is the lowest
frequency region. The voltage gain GV increases up to the unity as the switching (operating)
frequency increases. The unity gain frequency ω depends on coupling coefficient k. Range B
is the middle frequency region. The gain largely depends on load variations and switching

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 75 -
frequency in this region. Range C is the highest frequency range. The voltage gain GV
decreases from the unity as the switching frequency of the converter increases. Range B, also
called the double-turned circuit, provides the maximum transfer gain of the voltage. However,
the GV in Range B is very sensitive to load changes as well as coupling coefficient k.
Furthermore, it has nonlinear characteristics versus switching frequency. Thus, it is difficult to
control the output voltage. Regions A or C are able to control the output voltage because the
gain is a monotonic function of switching frequency. Range C is more desirable because the
gain voltage for each load conditions is much less sensitive than in the Range A. In this work,
Range C is suggested as a reliable region to control the output voltage in CET system with
variable air gap length and the load (Fig. 4.35). Moreover, when increasing switching
frequency, the changes in output voltage are very fast. This is important in control system, for
example when danger state is detecting (fs < f0).
0.5
1
0.2 0.4 0.6 0.8 1
14=ρ
2.22=ρ
4.44=ρ
6.66=ρ111=ρ
5.155=ρ
200=ρ
max00 / II
ω0ω
30ω
Fig. 4.34. The output current characteristics in CET system with SS compensation topology versus
operating frequency, for a different values wave impedance by R0 = const.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 76 -
sω
Fig. 4.35. The basic output power characteristics of CET system versus operating frequency.
4.4 Conclusions
In this Chapter the series resonant converter used in Contactless Energy Transmission
(CET) system operated at resonance has been described. This means, that primary and
secondary leakage inductances of the CET transformer are compensated by series resonance
capacitors. By the use of these capacitors, the connected load to the CET system is seen as an
ohmic load by power supply converter. Therefore, switching instance could occur at zero
current of power transistors. The full bridge inverter topology composed by four switches is
preferred because of better utilization of voltage supply. With a unity transformer turns ratio,
the dc output voltage is ideally equal to the dc input voltage only when the transistor
switching frequency is equal to the tank resonance frequency. The output voltage is reduced if
the switching frequency increase or decrease away from the resonance frequency. Thanks to
secondary circuit compensation the power transfer capability from primary to secondary
circuit though the air gap significantly increase. The series resonant converters are the most
commonly used because of simplicity in realization and are preferable for systems in which
the parameters like coupling factor and circuit quality factor change in wide range. Therefore,
in this work the SS compensation circuit will be used.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 77 -
5. Control and Protection System
5.1 Introduction
Control and protection of resonant converter is the critical part of CET system and should
meet following requirements:
very fast operation (switching frequency fs ≥ 20 kHz),
fully digital implementation,
no need to parameter adjustment,
stable operation,
flexibility to main circuits parameter changes,
reduced number of sensors (sensorless operation),
low cost,
high reliability.
Several control strategies has been proposed in the literature. Most of the methods are based
on a Phase Lock Loop (PLL) approach, see works e.g. (5), (8) and [37]. However, in this
Thesis another strategy based on extreme regulator has been proposed. This strategy is very
flexible and meets all above formulated requirements. The control system with extreme
regulator adjusts operating frequency and guaranties zero current switching of converter’s
IGBT power transistors.
5.2 Control System Operation and Behavior
The block diagram of CET Main Control and Protection System (MCPS) implemented in
FPGA Stratix II is shown in Fig.5.1. The significant assumption which determines the
behavior and control strategy of the CET system, is that the control circuit does not use
measurement signals from the secondary side of the CET transformer. Note that the secondary
transformer side and load another Secondary Side Protection Circuit (SSPC) is implemented.
The FPGA’s clock frequency is 100 MHz and the resonant switching frequency is 60 kHz.
The primary capacitor voltage Ucr1 and inverter output current i1 are sensed and sent to A/D
converters via operation amplifiers. A 12-b A/D converter, (AD9433) is used in the designed
system. The typical analog input signal is 5V (VDD), hence maximum of amplitude
corresponds to 2.5V. The FPGA device is Stratix II EP2S60F1020C3ES Fig. 5.2.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 78 -
Fig.5.1 Block diagram of the CET control and protection system.
Fig. 5.2. Stratix II EP2S60 DSP Development Board Components & Interfaces

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 79 -
a)
b)
Execution of
the algorithm
Execution of
the algorithm
Execution of
the algorithm
Execution of
the algorithm
Fig. 5.3. Control algorithm of extreme primary current regulator a) block diagram, b) basic waveforms primary voltage u1 (red line) and current i1 (green line).

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 80 -
To attenuate noise in input signals (i1’, uc
’) a digital recursive filtering algorithm has been
applied. These filtering signals i1f and ucf are used in extreme regulator (ER) based on
reversed counter which determinates converter switching frequency fref. Signal fref is delivered
to signal generator (SG) which generates gate pulses for MOSFET power transistors T1…T4.
Also, death time compensation is implemented in this block (SG).
To guarantee stabile operations, the regulator ER in every N-period sequence searches for
highest current amplitude i1fm and, after comparison with previous data, adjusts reference
value of switching frequency fref. Additionally, the filtered input signals i1f and ucf are
delivered to protection block (PR) which continuously watch up and in case when limit values
i1f(lim) and ucf(lim) are achieved, blocks gate pulses T1 …T4. To limit current during the
converter start-up, the regulator (ER) sets the switching frequency higher as resonance
frequency fref > fo and then in every N-period sequence reduces fref to fallow the maximum of
current amplitude. If the amplitude of current or voltage reaches nominal value i1f(N) < i1f(lim),
ucf(N) < ucf(lim), the regulator (ER) increases converter switching frequency. The period N of
regulator operation has been selected experimentally N=7. Control algorithm and registered
signals of extreme primary current regulator are presented on Fig. 5.3-4. Simulation results of
this control mode are shown in Fig. 5.5.
i1f
ucf
sg1 sg2
per_ch
per_ref
measure.
Over_voltage ucf
Over_current i1f
Fig. 5.4. Measured and control signals in FPGA device, observed by Altera Quartus software.
Another control algorithm realized by the control block of Fig. 5.1, is shown in Fig. 5.6. In
this case the phase angle between primary voltage and primary current is controlled. The
control algorithm behaves very similar to the previous mode.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 81 -
a)
b)
c)
Fig. 5.5. Simulated results of control signals behaviors when control algorithm work as extreme
regulator of primary current. a) output voltage, maximum pick value of primary current, reference period (operating frequency) ,
b) period sign and primary current, c) Steady-state waveforms of the voltages u1, u2, and currents i1, i2, iin

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 82 -
However, in this case the extreme regulator follows the minimum difference of actual phase
angle between primary voltage and current and its referenced values. By the change of sign
and value of the reference phase angle, the reference operating frequency is also changed.
Finally, the system can operate below, above or with resonant circuit frequency. The
significant advantage of this control mode is stabile operation in safe working area (see Fig.
4.35) close to resonant frequency. This feature is very important when circuit quality factor is
low. Simulated results are shown in Fig. 5.7-8.
MEASUREMENTAND SIGNALINTERFACE
RECURSIVEFILTER
IS PRESENT VALUE OF PHASE ERROR
GRATER THENPREVIOUS
Did frequencyincrease in previous
algorithm cycle
YES NO
YES YESNO NO
Increaseoperating frequency
Decreaseoperatingfrequency
Increaseoperating frequency
Changeoperating frequency
Data save
IMPULS SIGNALS GENERATOR
NO CHANGES
Did frequencyincrease in previous
algorithm cycle
PHASE ERRORDETECTION
REFERENCEVALUE OF
PHASE ERROR
Fig. 5.6. Extreme regulator algorithm for phase angle ϕ - mode.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 83 -
a)
b)
Fig. 5.7. Simulated result of control signals behaviors when control algorithm operates in the ϕ - mode for two values of load resistance (6, 16 Ohm).
a) reference period (operating frequency) and output voltage b) phase angle between primary voltage and primary current as a clk_impulse value.
Note, that the DC output voltage changes depending on the value of load resistance (Fig.
5.7a bottom). The regulator adjusts switching frequency for new load conditions (Fig. 5.7a –
upper). This is typical behavior of series compensated resonant converter.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 84 -
a)
b)
Fig. 5.8. Steady-state waveforms of the voltages u1, u2, and currents i1, i2, iin, io a) Ro = 6Ω, a) Ro = 16Ω

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 85 -
6. Design and Description of Laboratory Prototype
6.1 Introduction
Based on the discussion presented in previous Chapters 3-5, the methodology of CET
system design will be given in this Chapter. Further, the description of laboratory prototype
constructed in the Department of Electrical Drives, Electrotechnical Institute is provided.
6.2 Design Procedure of CET System
The block diagram design procedure of a CET system is presented in Fig. 6.1.
Fig. 6.1. Block diagram of design procedure of a CET system

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 86 -
A short description of the blocks included in design procedure is as follows:
1. The specification of CET system mainly depending on the three cases:
desired shape, power range and application destination.
2. The power transfer capability and efficiency is directly dependent upon the coil design.
So, the transformer design plays the most important role in the development of the CET
system.
3. Power transfer simulations and calculations enables to calculate theoretically whether
CET system with will be viable and able to reach the specification.
4. Advanced issues such as communications, shielding, heating problems and stability also
needs to be taken into consideration. Important issues such as human safety and regulation
issues regarding magnetic fields.
5. Optimization of the coil geometries and the circuit analyze allows to develop the
most efficient solution for the CET system.
6. Choice of primary and secondary leakage inductances of the CET transformer
compensation by resonance capacitors. By the use of these capacitors, the connected load
to the CET system is seen by power supply converter as an ohmic load. Selected
compensation topology determines system behavior and sensitivity for variable load and
magnetic coupling factor.
7. Finally the development, building and testing of the CET system prototype
6.3 Description of the Laboratory Prototype
In this Subsection a 3kW laboratory set-up of CET system is presented. The view of
the laboratory setup is depicted in Fig. 6.3-4. The primary winding of CET system is fed
through a high frequency full (Fig. 6.2) (or half) bridge converter while secondary winding
placed on different part of core is an integral part of the load. The resonant converter consists
of a frequency controlled insulated gate bipolar transistor (IGBT) bridge and converts the
rectified DC link voltage into an AC high resonant frequency voltage.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 87 -
230
V 5
0 H
z )(1 ti
)(2 ti)(1 tu
0U
)(2 tu
0I
)(2 tizE
)(tim
Fig. 6.2. Configuration of contactless energy transmission (CET) system
To compensate high leakage inductance of the rotatable transformer with large air gap and
reduce converter switching losses, the series resonant capacitive circuit SS has been used. The
resonance frequency is adjusted by extreme regulator which follows the instantaneous value
of primary peak current and guaranties zero current switching of converter’s IGBT power
transistors.
Resonant converter is build on high power switching Mitsubishi IGBT modules CM200DU-
24NFH. The CET rotatable transformer is build on two PM 114/93 – B65733 Epcos ferrite
core (Fig.6.5-6). Coupling between the transformer windings changes in a wide range and it is
not known when the system start-up. Hence, leakage inductances of the windings may change
in a wide range as it was shown in Fig. 3.23.
Fig. 6.3. View of laboratory setup

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 88 -
Fig. 6.4. View of 3kW contactless power supply system with rotatable transformer and series resonant inverter
Fig. 6.5. Ferrite pot cores dimensions used in laboratory setup CET system.
(PM 114/93 – B65733)

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 89 -
a)
b)
Fig. 6.6. Ferrite pot cores,
a) before put into resin, b) in resin prepared to use in CET system prototype.
The basic work parameters of the CET system, operating with about 60 kHz resonance
frequency are given in Table 6.1. Measured self inductances of primary and secondary
rotating transformer winding in laboratory model are shown in Fig. 6.7. The measured
coupling factor and magnetizing inductance are shown in Fig. 3.23 and Fig. 3.24 respectively
and measured leakage factor σ is shown in Fig. 6.8.
Table 6.1 Basic Parameters of Rotatable Transformer and Resonant Circuit
Parameter Value Unit N1 32 coils N2 32 coils CR1 63 nF CR2 63 nF C1 1000 μF C0 100 μF
Adjustable air gap 0 - 30 mm

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 90 -
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
1,1
0 2 4 6 8 10 12 14 16 18 20 22 24
Air gap [mm]
Self inductance[mH] primary
winding
secondarywinding
Fig. 6.7. Measured self inductance primary and secondary winding of rotating transformer in laboratory model.
0,000
0,100
0,200
0,300
0,400
0,500
0,600
0,700
0,800
0 5 10 15 20 25 30
Fig. 6.8. Measured leakage factor σ of the pot core transformer in the laboratory model.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 91 -
7. Simulation and Experimental Results 7.1 Introduction
In this Chapter simulation and experimental results of developed CET system are
presented. The research has been carried out in two main directions:
Performance characterization of different compensation circuits (SS, SP) used in
CET systems,
Explaining and presenting the performance of the developed CET system with
proposed extreme regulator and protection circuit.
7.2 Performance Characterization of SS and SP Compensation Circuits
Simulation model of control and power structures of CET system were implemented in
SABER and OrCAD-PSpice packages (see Appendix 3). These packages provide analysis and
behavior of the complete analog and mixed-signal systems including electrical subsystem.
Simulated output voltage characteristics of CET system for SS and SP compensation
topologies are shown in Fig.7.1-4, respectively.
0
20
40
60
80
100
120
140
160
180
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
fr/fs
Uo
5101520253035404550
0
20
40
60
80
100
120
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
fs/fr
Uo
5101520253035404550
Fig. 7.1. Simulated output voltage characteristics for SS circuit compensation Cr1 = Cr2,versus different load resistances and converter operating frequency.
Simulated circuit parameters: a) L1 = L2 = 296 μH, Cr1 = Cr2 = 63 nF, k = 0,247, b) L1 = L2 = 775 μH, Cr1 = Cr2 = 63 nF, k = 0,8

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 92 -
020406080
100120140160180200
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
fr/fs
Uo
5101520253035404550
020406080
100120140160180200
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
fr/fs
Uo
5101520253035404550
Fig. 7.2. Fig. Simulated output voltage characteristics for SP circuit compensation Cr1 > Cr2,versus different load resistances and converter operating frequency.
Simulated circuit parameters: a)L1 = L2 = 296 μH, Cr1 = 67 nF, Cr2 = 63 nF, k = 0,247
b) L1 = L2 = 296 μH, Cr1 = 63 nF, Cr2 = 59.2 nF, k = 0.247
0
20
40
60
80
100
120
140
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2fr/fs
Uo
5101520253035404550
0
20
40
60
80
100
120
140
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
Uo
5101520253035404550
Fig. 7.3. Simulated output voltage characteristics for SP circuit compensation Cr1 > Cr2,versus different load resistances and converter operating frequency.
Simulated circuit parameters: a) L1 = L2 = 775 μH, Cr1 = 175 nF, Cr2 = 63 nF, k = 0,8
b) L1 = L2 = 775 μH, Cr1 = 63 nF, Cr2 = 22,7 nF, k = 0,8
020406080
100120140160180200
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
fr/fs
Uo
5101520253035404550
0
20
40
60
80
100
120
140
160
180
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2fs/fr
Uo
5101520253035404550
Fig. 7.4. Simulated output voltage characteristics for SP circuit compensation Cr1 = Cr2,versus different load resistances and converter operating frequency.
Simulated circuit parameters: a) L1 = L2 = 296 μH, Cr1 = Cr2 = 63 nF, k = 0,247 b) L1 = L2 = 775 μH, Cr1 = Cr2 = 63 nF, k = 0,8

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 93 -
The simulated results are in good agreement with analytically calculated
characteristics presented in Subsection 4.3. Also, it can be seen that, SP compensation is more
sensitive to operating frequency and circuit parameter changes. Therefore, in the CET systems
where the coupling factor changes in wide range, the SS compensation is recommended.
In Fig. 7.5 the per unit output power versus operating (switching) frequency are
shown. As parameter the value of circuit wave impedance ρ is given. It can be seen that,
independent of wave impedance value, the highest transferred power is achieved when
converter switch with resonance frequency fs/f0 =1.
maxo
o
PP
o
s
ff
1ρ
12 4ρρ =
51
0ρρ =
Ω== 47/1 rr CLρ
Fig. 7.5. CET system Per unit output power versus operating frequency
for a different values of circuit wave impedance ρ.
7.3 Investigation Results of Developed CET System
Two variants of converter topologies have been investigated: full bridge and half
bridge. Also in experimental setup two types of transistor gate drivers were used. The first one
was Semikron-SKHI26W and the other has been designed and constructed by author. Because
of 3μs minimal dead time in the Semikron drivers, only 25 kHz switching frequency could be
achieved. The simulated and experimental results for this case are given in Appendix 5.
The steady-state and transient waveforms of the voltage and current in CET system with
rotating transformer and full bridge resonant converter operating at 60 kHz switching
frequency and 1μs dead time are shown in Figures 7.6-8

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 94 -
Simulated
Experimental
a)
CH2 – primary current - i1CH1 – primary voltage - u1
CH4 – secondary voltage - u2CH3 – secondary current - i2
u1
i2 i1u2
P1
3mm - air gap, 10 – resistance load
b)
CH2 – primary current - i1CH1 – primary voltage - u1
CH4 – secondary voltage - u2CH3 – secondary current - i2
u1
i2
i1
u2
P1
3mm - air gap, 10 – resistance load
c)
CH2 – primary current - i1CH1 – primary voltage - u1
CH4 – secondary voltage - u2CH3 – secondary current - i2
u1
i2
i1
u2
P1
3mm - air gap, 10 – resistance load
Fig. 7.6. Steady-state waveforms of the voltages u1, u2, currents i1, i2 and primary side power P1. Air gap length 3mm, load resistance 10Ω.
a) Converter operation with resonance frequency , b) Converter operation below resonance frequency, c) Converter operation above resonance frequency.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 95 -
Experimental results (full bridge)
a)
CH2 – primary current - i1CH1 – primary voltage - u1
CH4 – secondary voltage - u2CH3 – secondary current - i2
u1
i1i2u2
P1
10mm - air gap, 10 – resistance load
b)
CH2 – primary current - i1CH1 – primary voltage - u1
CH4 – secondary voltage - u2CH3 – secondary current - i2
u1
i1
i2
u2
P1
10mm - air gap, 10 – resistance load
c)
CH2 – primary current - i1CH1 – primary voltage - u1
CH4 – secondary voltage - u2CH3 – secondary current - i2
u1 i1
i2u2
P1
10mm - air gap, 10 – resistance load
Fig. 7.7. Steady-state waveforms of the voltages u1, u2, currents i1, i2 and primary side power P1. Air gap length 10mm, load resistance 10Ω.
a) Converter operation with resonance frequency , b) Converter operation below resonance frequency, c) Converter operation above resonance frequency.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 96 -
Experimental results (full bridge)
Air gap length 25.5mm, load resistance 10Ω. Air gap length 25.5mm, load resistance 20Ω. a)
2.52kW
1kVA10.0A
10.0A
CH2 – primary current - i1CH1 – primary voltage - u1
CH4 – secondary voltage - u2CH3 – secondary current - i2
u1
i1i2
u2
P1
25.5 mm - air gap, 10 – resistance load
CH2 – primary current - i1CH1 – primary voltage - u1
CH4 – secondary voltage - u2CH3 – secondary current - i2
u1i1
i2
u2
P1
25.5 mm - air gap, 20 – resistance load
b)
CH2 – primary current - i1CH1 – primary voltage - u1
CH4 – secondary voltage - u2CH3 – secondary current - i2
u1i1
i2
u2
P125.5 mm - air gap,
10 – resistance load
CH2 – primary current - i1CH1 – primary voltage - u1
CH4 – secondary voltage - u2CH3 – secondary current - i2
u1
i1
i2u2
P1
25.5 mm - air gap, 20 – resistance load
c)
CH2 – primary current - i1CH1 – primary voltage - u1
CH4 – secondary voltage - u2CH3 – secondary current - i2
u1
i1i2
u2
P125.5 mm - air gap,
10 – resistance load
CH2 – primary current - i1CH1 – primary voltage - u1
CH4 – secondary voltage - u2CH3 – secondary current - i2
u1i1
i2
u2
P1
25.5 mm - air gap, 20 – resistance load
Fig. 7.8. Steady-state waveforms of the voltages u1, u2, currents i1, i2 and primary side power P1.
a) Converter operation with resonance frequency , b) Converter operation below resonance frequency, c) Converter operation above resonance frequency.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 97 -
Table 7.1 Basic parameters of rotating transformer and resonant circuit for results present on Fig.7.5-10
Parameter Value Unit
N1 32 coils N2 32 coils L11 166,5 μH L12 203,5 μH L22 166,5 μH M 203,5 μH k See Fig. 3.23. -
CR1 63 nF CR2 63 nF
Adjustable air gap 0 - 30 mm
Please note that very good agreement between simulated and experimental results are
achieved (Fig. 7.6). Further, experimental results for different air gap length and load
resistance are shown (Fig. 7.7-8). It can be seen that operation of the converter is stable for all
presented values of air gap length and load conditions. As expected the highest transferred
power occurs for operation with resonant frequency (see waveforms in Fig. 7.6a, 7.7a, 7.8a).
Experimental results (half bridge)
Fig. 7.9. Experimental waveforms of the voltages u1, u2, currents i1, i2, and primary side power P1 at start-up CET system.
The steady-state and transient waveforms of the voltage and current in CET system with
rotating transformer and half bridge (see Fig. 4.4a) resonant converter operating at 60 kHz
switching frequency and 1μs dead time are shown in Figures 7.9-11. Also in this case CET
system with extreme regulator operates stable and adjusts the converter switching frequency
for different air gap length and load conditions. However, to achieve in the half bridge

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 98 -
converter the same output power as in full bridge topology the supply DC voltage Ez has to be
doubled.
Experimental results (half bridge)
a)
b)
c)
Fig. 7.10. Steady-state waveforms of the voltages u1, u2, uCr1, uL1
currents i1, i2 and primary side power P1. Air gap length 3mm, load resistance 20Ω. a) Converter operation with resonance frequency , b) Converter operation below resonance frequency,
c) Converter operation above resonance frequency.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 99 -
Experimental results (half bridge)
Air gap length 9mm, load resistance 20Ω. Air gap length 22.5mm, load resistance 20Ω. a)
b)
u1
u2
i1i2
CH2 – primary current - i1CH1 – primary voltage - u1
CH4 – secondary voltage - u2CH3 – secondary current - i2
P1
22.5mm - air gap, 20 – resistance load
c)
u1
u2
i1
i2
CH2 – primary current - i1CH1 – primary voltage - u1
CH4 – secondary voltage - u2CH3 – secondary current - i2
9mm - air gap, 20 – resistance load
Fig. 7.11. Steady-state waveforms of the voltages u1, u2, currents i1, i2 and primary side power P1. a) Converter operation with resonance frequency , b) Converter operation below resonance frequency,
c) Converter operation above resonance frequency.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 100 -
Very important is safe start-up of the CET system. Normally, the control circuit has no
information about the load value. Therefore, the regulator starts with frequency above
resonance (with high impedance Zα of the resonant tank) to protect converter against
overload. As it is shown in Fig. 7.9 after several periods (about 125 ms) the switching
frequency is adjusted to resonance frequency. This guarantees safe start-up even when the air
gap length changes in the range limited by max and min operation frequency set in the
extreme regulator.
Fig. 7.12. Total efficiency versus air gap width and load resistance for SS compensation method,
(simulated results- dashed/dotted line, experimental results – continuous line).
Fig. 7.12 shows the total DC input-output efficiency of the CET system versus transformer air
gap length and the load (for laboratory and simulation model). The efficiency curves show
(Fig. 7.12) a slight difference between simulation and experimental values. This is result of
different transistor models (in simulation were used available in PSpice library International-
Rectifier transistors model - IRGPC50S), whereas in the laboratory prototype Mitsubishi
IGBT power transistors CM200DU-24NFH) have been mounted). Note that for higher load
resistances higher efficiency can be achieved, but the circuit becomes more sensitive for
magnetic coupling coefficient changes. The total efficiency achieves 0,93 – 0,85 for rotating
transformer air gap 0.1 up to 3 cm, respectively.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 101 -
8. Summary and Closing Conclusions
The thesis has been devoted to modeling, analyze and design of modern inductive
coupled Contactless Energy Transmission (CET) system with rotatable transformer.
Various problems were addressed and discussed as follows:
• Rotatable transformer model developed in step-by-step manner: starting from
constructions, geometrical and material data through reluctance model till ∏ -
equivalent circuits with inductances as parameters (Chapter 3);
• Analyze and discussion of resonant circuits characteristic used for transformer leakage
inductance compensation SS: series-series compensation and SP: series-parallel
compensation (Chapter 4);
• Analyze and modeling of resonant converter operation modes: below, at resonance
and above resonance frequency;
• Development of control and protection methods: with detection of phase angle
between primary current and voltage (primary power factor), or extreme primary
current regulator (Chapter 5);
• Power circuit design and construction (Chapter 6).
To analyze and comparative study several simulation and calculation CET models were
developed using SABER, Matlab and OrCad- PSpice software packages.
For experimental validation a laboratory set-up based on 3 kW H-Bridge converter with
rotatable coupling transformer (ferrite core) and FPGA based extreme regulator has been
constructed.
Among important results of the thesis are:
• Application of high-switching frequency IGBT converter operating at resonance
frequency provides more efficient CET system with reduced transformer size and
weight;
• Theoretically, there is no power transfer limit, even with low coupling coefficient, if
the circuit operates with the resonance frequency of secondary current, in condition
that the primary winding is compensated and resonant frequency of primary current is
equal to secondary fp = fs;

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 102 -
• Application of control method which guarantees Zero Current Switching (ZCS)
conditions in the resonant converter allows to reduce the switching losses, hence
improves total efficiency;
• As shown, the use of FPGA-based digital controller allows implementing very fast
and flexible extreme regulator and protection algorithm.
• The developed CET system has following features and advantages: high total
efficiency up to 93% (depending on air gap length), operating frequency 60 kHz, the
extreme regulator system is self adjusted for actual resonance frequency and variable
load as well as variable magnetic coupling factor.
In the author opinion the results of this thesis can be used in design and development of
modern inductive coupled CET systems with rotatable transformers for robots and
manipulators. The presented methodology can also be easy expanded for design power supply
systems for other mobile or special loads (battery chargers, transport systems, etc.).

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 103 -
References
Books and PhD Thesis
1. W. Erickson and D. Maksimovic: “Fundamentals of Power Electronics” (Second Edition), Kluwer
Academic Publisher, 2001.
2. I. Batarseh: “Power Electronic Circuits”, University of Central Florida 2004.
3. M. P. Kazmierkowski, R. Krishnan, F. Blaabjerg: “Control in Power Electronics”, Academic Press,
2002.
4. M. P. Kazmierkowski, J. T. Matysik: „Introduction into Signal and Power Electronics”, Oficyna
Wydawnicza, Warsaw University of Technology, 2005 (In Polish).
5. J. T. Matysik: “Integration Control Method for Class D Transistor Source Inverters with a Series
Resonant Circuit”, Habilitation Thesis, Warsaw University of Technology, 2001 (in Polish).
6. N. Mohan, T. M. Undeland, W. P. Robbins: “Power Electronics. Converter, Applications and Design”,
Second Edition, J. Wiley & Sons Inc., 1995.
7. L. Østergaard: “Modelling and Simulation of the Diode Split Transformer”, the Danish Academy of
Technical Sciences 1999.
8. R. Stala „Układ bezstykowego przekazu energii elektrycznej” PhD Thesis, Kraków AGH 2003
9. J. G. Kassakian, M. F. Schlecht, G. C. Verghese: „Principles of Power Electronics“, Massachusetts
Institute of Technology 1991.
10. A. van den Bossche, V. C. Valchev: „Inductors and Transformers for Power electronics“, CRC Press,
Boca Raton, USA 2005.
11. T. Citko: “Energoelektronika, Układy Wysokiej Częstotliwości ”, Wyd. Politechniki Białostockiej,
Białystok 2007.
12. Unitrode Magnetics Design Handbook, Unitrode Corporation, Merrimack, NH, 2001.
Papers [1] Ch. Apneseth, D. Dzung, S. Kjesbu, G. Scheible, and W. Zimmermann: Introduction wireless proximity
switches. ABB Review, 4/2002, pp. 42-49.
[2] J. M. Barnard, J. A. Ferreira, J. D. van Wyk: “Sliding Transformer for Linear Contactless Power Delivery”,
IEEE Trans. on Ind. Electronics, vol. 44, No. 6, 1997, pp.774-779.
[3] T. Bieler, M. Perrottek, V. Nguyer, Y. Perriard:”Contactless Power and Information Transmission”, IEEE
Trans. on Ind. Applications, vol. 38, No.5, 2002, pp. 1266-1272.
[4] J. de Boeij, E. Lomonova, J. Duarte, A. Vandenput: “Contactless Energy Transfer to a Moving Actuator”, in
Proc. IEEE-ISIE 2006, Montreal (CD).
[5] J. T. Boys, G. A. J. Elliot: “An Appropriate Magnetic Coupling Co-Efficient for the Design and Comparison
of ICPT Pickups”, IEEE Trans. on Power Electronics, Vol. 22, No. 1, Jan., 2007, pp. 333-335.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 104 -
[6] D. Bess: “Fuel Cells and Wireless Power Transfer at the 2008 International Consumer Electronics Show”,
Bodo’s Power, February 2008, pp. 16-17.
[7] K.W.E. Cheng and Y. Lu: “Development of a Contactless Power Converter”, in Proc. IEEE ICIT'02,
Bangkok, THAILAND, 2002, (CD).
[8] G. A. Covic, G. Elliot, O. H. Stielau, R. M. Green, J. T. Boys: “The Design of a contact-less energy transfer
system for a people mover system”, in Proc. of IEEE, 2000.
[9] G. A. Covic, J. T. Boys, M. L. G. Kisin, H. G. Lu: “A Three-Phase Inductive Power Transfer System for
Roadway-Powered Vehicles”, IEEE Trans. on Industrial Electronics, Vol. 54, No. 6, 2007, pp. 3370-3378.
[10] A. Ecklebe, A. Lindemann: “Analysis and Design of a Contactless Energy Transmission System with
Flexible Inductor Positioning for Automated Guided Vehicles”, in Proc. IEEE Industrial Electronics,
IECON 2006 - 32nd Annual Conference on . Nov. 2006, pp. 1721 – 1726.
[11] A. Esser, H. Ch. Skudelny: "A New Approach to Power Supply for Robots“, IEEE Trans. on Ind.
Applications, vol. 27, No. 5, 1991, pp. 872-875.
[12] A. Esser: “Contactless Charging and Communication for Electric Vehicles”, IEEE Industry Applications
Magazine, Nov. /Dec., 1995, pp. 4-11.
[13] Fredrik F. A. Van der Pijl, P. Bauer, J. A. Ferreira, H. Polinder: “Design of an Inductive Contactless Power
System for Multiple Users”, in Proc. IEEE IAS Ann. Mtg., 2006, pp. 343-349.
[14] Fredrik F. A. Van der Pijl, P. Bauer, J. A. Ferreira, H. Polinder: „Quantum Control for an Experimental
Contactless Energy Transfer System for Multiple Users“, in Proc. IEEE IAS Ann. Mtg., 2007, pp. 1876-
1883.
[15] Y. Fujita, A. Hirotsune, Y. Amano: “Contactless Power Supply for Layer-Selection Type Recordable Multi-
Layer Optical Disk”, IEEE Optical Data Storage Topical Meeting, 2006 (CD).
[16] J. G. Hayes, M. G. Egan: “A Comparative Study of Phase-Shift, frequency, and Hybrid Control of the
Series Resonant Converter Supplying the Electric Vehicle Inductive Charging Interface”, in Conf. IEEE-IAS
Ann. Mtg., 1999, pp. 450-457.
[17] J. G. Hayes, M. G. Egan, J. M. Murphy, S. E. Schulz, and J. T. Hall, “Wide-load-range resonant converter
supplying the SAE J- 1773 electric vehicle inductive charging interface,” IEEE Transactions on Industry
Applications, Vol. 35, no. 4, pp. 884–895, 1999.
[18] J. Hirai, T. W. Kim, and A. Kawamura: “Practical Study on Wireless Transmission of Power and
Information for Autonomous Decentralized Manufacturing System” IEEE Trans. on Power Electronics, vol.
46, no. 2, 1999, pp. 349-359.
[19] J. Hirai, T. W. Kim, and A. Kawamura: “Wireless Transmission of Power and Information and Information
for Cable less Linear Motor Drive” IEEE Trans. on Power Electronics, vol. 15, no. 1, 2000, pp. 21-27.
[20] J. Hirai, T. W. Kim, and A. Kawamura: “Study on intelligent battery charging using inductive transmission
of power and information”. IEEE Trans. on Power Electronics, vol. 15, no. 2, 2000, pp. 335-344.
[21] S. Jalbrzykowski, T. Citko: „Mostkowa konfiguracja przekształtnika podwyższającego napięcie z
dwugałęziowym rezonansem równoległym” In Proc. of Conf. SENE2007, Łódź 21-23 XI 2007, vol. I,
pp.175-180 (In Polish).

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 105 -
[22] S. Jalbrzykowski, T. Citko: “Current-Fed Resonant Full-Bridge Boost DC/AC/DC Converter”, IEEE
Transactions on Industrial Electronics, Vol. 55, No. 3, March 2008, pp. 1198-30.
[23] Y. Jang and M. M. Jovanovic, “A new soft-switched contact-less battery charger with robust local
controller,” IEICE/IEEE INTELEC 03, pp. 473–479, 2003.
[24] Y. Jang and M. M. Jovanovic, “A Contactless electrical energy transmission system for portable-telephone
battery chargers,” IEEE Transactions on Industrial Electronics, Vol. 50, no. 3, pp. 520–527, 2003.
[25] C.-G. Kim, D.-H. Seo, J.-S. You, J.-H. Park, and B. H. Cho, “Design of a Contactless battery charger for
cellular phone,” IEEE Transactions on Industrial Electronics, Vol. 48, no. 6, pp. 1238– 1247, 2001.
[26] K.W. Klontz et. Al.: “An Electric Vehicle Charging System with Universal Inductive Interface”, In Proc.
Of the PCC-Yokohama, 1993, pp. 227-232.
[27] A. Kurs et. Al.: “Wireless Power Transfer via Strongly Couplet Magnetic Resonances”, Sciencexpress,
www.sciencexpress.org, Published online 7 June 2007; 10.1126/science.114354
[28] R. Laouamer, M. Brunello, J. P.Ferrieux, O. Normand, N. Buchheit:” A multi-resonant converter for non-
contact charging with electromagnetic coupling” in Proc. Industrial Electronics, Control and
Instrumentation, 1997. IECON 97. 23rd International Conference on Volume 2, 9-14 Nov. 1997 Page(s):792
- 797 vol.2.
[29] R. Laouamer, J.-P. Ferrieux, and H. Benqassmi, “A comparison of resonant converter topologies with three
and four energy storage elements for automatic inductive charging applications,” Electric Machines and
Power Systems, Vol. 27, pp. 221–236, 1999.
[30] J. Lastowiecki and P. Staszewski: Sliding Transformer With Long Magnetic Circuit For Contactless
Electrical Energy Delivery To Mobile Receivers, IEEE Trans. on Industrial Electronics, vol. 53, No 6,
2006, pp. 1943-1948.
[31] J. T. Matysik: “A New Method of Integration Control with Instantaneous Current Monitoring for Class D
Series-Resonant Converter”, IEEE Trans. on Industrial Electronics, vol. 53, No 5, 2006, pp. 1561-1576.
[32] J. T. Matysik: “The Current and Voltage Phase Shift Regulation in Resonant Converters With Integration
Control”, IEEE Trans. on Industrial Electronics, vol. 54, No 2, 2007, pp. 1240-1242.
[33] R. Mecke, C. Rathage: “High frequency resonant converter for contactless energy transmission over large
air gap”, In Proc. of IEEE-PESC, Aachen 2004, pp.1737-1743.
[34] R. Mecke, Ch. Rathge: “Analysis of inductive energy transmission systems with large air gap at high
frequencies”, in Proc. of EPE 2003 – Toulouse (CD).
[35] R. Mecke: “Contactless Inductive Energy Transmission Systems with Large Air Gap”, in Proc. EPE 2001,
Graz, (CD).
[36] J. Meins, R. Czainski, F. Turki: „Phase characteristics of resonant contactless high power supplies“,
Przeglad Elektrotechniczny, Nr 11/2007, pp. 10-13
[37] H. Miura et al.: “A Synchronous Rectification Using a Digital PLL Technique for Contactless Power
Supplies”, IEEE Trans. on Magnetics, Vol. 41, No. 10, 2005, pp. 3997-3999.
[38] J. Mucko: “Series Resonant Inverter with Series Load – Compensation of Characters for Different
Presumption and Different Load”, In Proc. of Conf. MiS-4, Kościelisko, Poland, 19-23 czerwca 2006, vol.
I, pp.81-88 (In Polish).

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 106 -
[39] J. Mucko: “Series Resonant Inverter with Parallel Load – Compensation of Characters for Different
Presumption and Different Load”, In Proc. of Conf. MiS-4, Kościelisko, Poland, 19-23 czerwca 2006, vol.
I, pp.89-96 (In Polish).
[40] F. Nakao, Y. Matsuo, M. Kiatoka, H. Sakamoto: „Ferrite Core Couplers for Inductive Chargers”, PCC
Osaka, 2002, pp. 850-854.
[41] K. O’Brien, G. Scheible, H. Gueldner: “Analysis of Wireless Power Supplies for Industrial Automation
Systems”. In Proc. of IEEE-IECON’03, (CD).
[42] K. O’Brien, G. Scheible, H. Gueldner: “Design of large air-gap transformers for wireless power supplies”.
In Proc of PESC 2003 IEEE 34th Annual Power Electronics Specialist Conference, vol. 4, pp. 1557-1562.
[43] K. Onizuka et al.: “Chip-to-Chip Inductive Wireless Power Transmission System for SiP Applications” in
Proc. IEEE-CICC, 2006, pp. 15-1-1 – 15-1-4.
[44] K. D. Papastergiou, D. E. Macpherson: “An Airborne Radar Power Supply With Contactless Transfer of
Energy—Part I: Rotating Transformer”, IEEE Trans. on Industrial Electronics, vol. 54, no. 5, October
2007, pp. 2874-2884.
[45] K. D. Papastergiou, D. E. Macpherson: “An Airborne Radar Power Supply With Contactless Transfer of
Energy—Part II: Converter Design”, IEEE Trans. on Industrial Electronics, vol. 54, no. 5, October 2007
pp. 2885-2893.
[46] A. G. Pedder, A. D. Brown, J. A. Skinner: “A Contactless Electrical Energy Transmission System”, IEEE
Transactions on Industrial Electronics, vol. 46, no. 1, 1999, pp. 23-30.
[47] M. Ryu, Y. Park, J. Baek, H. Cha: “Comparison and Analysis of the Contactless Power Transfer Systems
Using the Parameters of the Contactless Transformer”, in Proc. IEEE Power Electronics Specialists
Conference, 2006 (CD).
[48] N. Samad, et. al.: “Design of a Wireless Power Supply Receiver for Biomedical Applications”, In Proc.
IEEE-APCCAS, 2006, pp. 674-677.
[49] G. Scheible, J. Endersen, D. Dzung, J. E. Frey: “Unplugged but Connected: Design and Implementation of a
Truly-Wireless Real-Time Sensor/Actuator Interface”, ABB Review, No. 3 and 4, 2005, pp. 70-73 and 65-68
[50] J. Schutz, G. Scheible, C. Willems: „Load Adaptive Medium Frequency Resonant Power Supply“, in Conf.
Proc. IEEE-IECON, 2002.
[51] G. Scheible, J. Schutz, C. Apneseth: “Novel Wireless Power Supply System for Wireless Communication
Devices in Industrial Automation Systems”, in Proc. IEEE-IECON, 2002.
[52] C. L. Sonntag, E. A. Lomonova, J. L. Duarte, A. J. A. Vandenput: „Specialized Receivers for Three-Phase
Contactless Energy Transfer Desktop Applications“, in Proc. EPE 2007, (CD).
[53] R. L. Steigerwald and J. S. Glaser: “A Soft-Switched Secondary-Side Post Regulator”, IEEE Transactions
on Industrial Electronics, 2004, pp. 1055-1059.
[54] J. Voelcker: “Lithium Batteries Take the Road”, IEEE Spectrum, Sept. 2007, pp. 27-31.
[55] S. Valtchev, B. V. Borges, and J. Klaassens, “Series resonant converter applied to contactless energy
transmission,” in Proc. of 3rd Conference on Telecommunications, 2001.
[56] Ch-S. Wang, O. H. Stielau, and G. A. Covic: “Design considerations for contactless electric vehicle battery
charger”, IEEE Trans. on Industrial Electronics, vol. 52, No 5, 2005, pp. 1308-1313.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 107 -
[57] W. Lim, J. Nho, B. Choi, T. Ahn : “Low-Profile Contactless Battery Charger Using Planar Printed Circuit
Board. Windings as Energy Transfer Device” , IEEE Trans. on Industrial Electronics, 2002 pp. 579-584
[58] H. J. Jiang, G. Maggetto, P. Lataire: “Steady-State Analysis of the Series Resonant DC–DC Converter in
Conjunction with Loosely Coupled Transformer - Above Resonance Operation”, IEEE Trans. on Industrial
Electronics, vol. 14, No 3, 1999, pp. 469-480.
Papers written during work on this Thesis [59] A. Moradewicz: “Study of Wireless Energy Transmission Systems Using Inductive Coupling”, In Proc. of
International Conf. PELINCEC, 2005, Warsaw, Poland (CD)
[60] A. Moradewicz: “Transformers in Wireless Energy Transmission System – Simulation study, In Proc. of
Arch. Electrotechnical Institute 2005, Vol. 226, Warsaw, Poland (In Polish).
[61] A. Moradewicz: “Wireless Energy Transmission System with Rotating Transformer – Simulation study”,
VII International Workshop for Candidates for a Doctor's Degree OWD’2005 – 22-25 October 2005 Wisla,
Poland, pp.191-196 (In Polish).
[62] A. Moradewicz: “Series Resonant Converter in Wireless Energy Transmission System – Simulation
Study”, In Proc. of Conf. MiS-4, Kościelisko, Poland, 19-23 czerwca 2006, Vol. I, pp.145-152 (In Polish).
[63] A. Moradewicz: “Wireless Energy Transmission system With Series Resonant Converter”, In Proc. of
Conf. Elektrotechnika 2006, 12-13 December, Warsaw, Poland (In Polish).
[64] A. Moradewicz, M. P. Kazmierkowski: “Novel FPGA Based Control of Series Resonant Converter for
Contactless Power Supply”, In Proc. IEEE EUROCON’07, Warsaw, 2007, (CD)
[65] A. Moradewicz: “Contactless Energy Transmission System”, Nowa Elektrotechnika, Vol. 38, No. 10,
pp.8-11, 2007, (In Polish).
[66] A. Moradewicz, M. P. Kazmierkowski: “Resonant Converter Based Contactless Power Supply for Robots
and Manipulators”, Journal of Automation, Mobile Robotics & Intelligent Systems, Vol. 2, No. 3, pp.20-25,
2008
[67] A. Moradewicz, M. P. Kazmierkowski: “FPGA Based Control of Series Resonant Converter for
Contactless Power Supply”, In Proc. of IEEE-ISIE Conf., Cambridge, 2008 (on CD).

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 108 -
Appendix 1
Remarks
The references in the text are given as follows:
books and PhD Theses are cited in round parenthesis for example (1), (2,3),
journal papers and conferences contributions are cited in square parenthesis for
example [1], [2,3].
List of basic symbols
Lr– leakage inductance
Cr– resonant capacitor
C – Capacitance
I – root mean square value of current
L – Inductance
R – Resistance or reluctance
T – time period
P – active power or permeance
Q – quality circuit factor
Z – Impedance
Z ‘– Reflected Impedance
X– reactance
Ez– Input voltage source
Uo– Output voltage
U1– Converter output voltage
U2– Rectifier input voltage
I1, I2 - Primary and secondary current
ϕ - phase shift angle between primary voltage and primary current
f – frequency
ω - Normalized operating angular frequency

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 109 -
k– coupling factor of the transformer
σ - leakage inductance factor
li– length of the magnetic path in the section
Ai– active core section area
μri– relative permeability of the section

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 110 -
Appendix 2
Basic Definitions
Wave impedance
r
r
CL
=ρ
Self resonant angular frequency of RLC circuit
( )21 αω −=rrCLr ;
r
r
LR
2=α - damper factor
Rr – summarized circuit resistance
rrCL1
0 =ω -resonant angular frequency when assuming, resistance of RLC circuit Rr =0
Quality circuit factor
rRrCrL
rRrRrCrRrL
Q ====ρ
ω
ω
0
10
Harmonic Distortion
%1001MnM
HD =
M1 – RMS value of first harmonic of voltage or current
Mn – RMS value of n harmonic of voltage or current
Total Harmonic Distortion
%1001
21
M
nMnTHD >Σ
=
M1 – RMS value of first harmonic of voltage or current
Mn – RMS value of n harmonic of voltage or current

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 111 -
Power Factor
1 cosIPFI
ϕ=
Partial Weighted Harmonic Distortion
2
14
1
100%h
h
hIPWHD
I
∞
==∑
Harmonic Constant
2 2
2
1
100%h
h
h IHC
I
∞
==∑

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 112 -
Appendix 3
Simulation models
SABER model scheme is presented in Fig. A.3.1. OrCAD-PSpice scheme is presented
in Fig. A.3.2.
a)
b)
c)
Fig. A.3.1. Scheme of SABER model, a) CET system structure, b) h-bridge inverter, c) output diode rectifier

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 113 -
+-
+
-Sbreak
S1
d4
d4
Lf1 2
D4D4t
z
D3t
ip
Dd4
D3
0
D1
AMP1
0
Ui200
d1GEN
L2
1
2
0
D1t
0
C2
63n
K K1
+-
+
-Sbreak
S4
+-
H1
H
d1
D2
0
D2t
zas2
U4
SYG_MINUS
0 1XG1 YG1
d3
Dd3
Dd2
ip
C1
63n
Rg
d2
AMP2
Ro
0
U1
SYG_PLUS
0 1XG1 YG1
+-
+
-Sbreak
S2
U2
SYG_MINUS
0 1XG1 YG1
SRC
d3
0
DT
U5
VPULSE_DT
01
231
DTOUTAMP
0
L1
1
2
zas
zas2
control circuit
BFUN2
0
1
2
3SDC
SRC
SV
AMP
Co
d2
+-
+
-Sbreak
S3
0
Dd1
U3
SYG_PLUS
0 1XG1 YG1
Fig. A.3.2. Scheme of OrCad - PSpice model.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 114 -
Appendix 4
Switching Losses
Most converter switches need to turn-on or turn-off the full load current at a high voltage,
resulting in what is known as hard switching. Figure. A.4.1. shows typical hard-switching
during power transistors commutation in full bridge converter operating with below and
above resonant frequency. In small time scale the switching loci for a hard-switching
converter are depicted in Fig. A.4.2. As the frequency of operation increases, the switching
losses also increase.
a) fs < fo
b) fs > fo
Fig. A.4.1. Time waveforms of power transistors and antiparallel diodes in H-bridge converter.
Operating frequency a) below resonance, b) above resonance.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 115 -
There are two types of switching losses:
• Turn-on, when the power transformer leakage inductance produces high di/dt, which
results in a high voltage spike across it.
• Turn-off, when the switching loss in mainly caused by the dissipation of energy stored
in the output parasitic capacitor of the power switch.
In a soft-switching circuit converter topology, an LC resonant network is added to shape the
switching device’s voltage or current waveform into a quasi-sinewave in such a way that a
zero voltage (ZVS) or current (ZCS) condition is created. This eliminates the turn-on or turn-
off loss associated with charging or discharging of the energy stored in the transistor’s
parasitic junction capacitors.
Fig. A.4.2. Typical switching loci for a hard-switching converter.
Simulation in OrCAD-Pspice used IRGPC50S – spice transistor model.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 116 -
Appendix 5
Investigation Results of Developed CET System Operating at 25 kHz
In Figures A.5.1-2 steady-state waveforms of the voltage and current of CET system with
rotating transformer and full bridge resonant converter operating at 25 kHz switching
frequency and 3μs dead time are shown.
Simulation
Experimental
a)
b)
c)
Fig. A.5.1. Steady-state waveforms of the voltages u1, u2, uCR1 and primary current i1 ,
system works as a battery charger. a) converter operation with resonance frequency, b) converter operation above resonance frequency,
c) converter operation below resonance frequency. SS - method of leakage inductances compensation applied.

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 117 -
Simulation Experimental a)
b)
c)
d)
e)
Fig. A.5.2. Steady-state waveforms of the voltages u1, u2, uCR1 and primary current i1 (at 0,95 rated load -
18Ω, dead time of power transistors gate drivers -3μs), a) converter operation with resonance frequency, b) converter operation above resonance frequency,c) converter operation below resonance frequency,
d,e) start-up laboratory model with 0.95 rated load of the converter .

Contactless Energy Transmission System with Rotatable Transformer – Modeling, Analyze and Design
- 118 -
Basic Parameters of Rotatable Transformer and Resonant Circuit for results presented
in Fig. A.5.1-2.
Parameter Value
Unit
N1 32 coils N2 32 coils L11 166,5 μH L12 203,5 μH L22 166,5 μH M 203,5 μH k 0,55 -
CR1 250 nF CR2 250 nF
Adjustable air gap 10,5 mm