Embed Size (px)
Citation preview

Computer-automated synthesis of building frameworks
DONALD E. GRIEKSON A N D GORDON E. CAMERON Solid Mechnr~ic.~ Divisiot~. Del~cirrtrrerzr of' Civil Etzgir~eer-irzg, Ur~iver-sit\) of Wrirerloo. Wrtrer-loo, Otit., Crrr~rrrl(i N 2 L 3C/
Rcccivcd February 6, 1984 Rcviscd manuscript accepted June 14. 1984
Thc paper surveys recent work carried out at the University of Waterloo concerning the computer-automated synthcsis of minimum-weight planar stcel frameworks. For any number of applicd loading schemes, the dcsign of the structurc may be constrained by a varicty of service and (or) ultimate 'limit-states' performance criteria concerning stresses, displaccmcnts. and (or) plastic collapse loads. Fabrication conditions can be imposcd to ensurc member-continuity and structure-symmetry requirements. Member sizes can be taken as either continuous or discrete variables to the synthcsis proccss, depending on whether custom or commercial-standard scctions arc available for the, dcsign. In the latter case, the structure may be automatically sized using the standard sections specified by a variety of different stcel dcsign codes (to datc, Canadian Institute of Steel Construction (CISC) and American Institute of Stecl Construction (AISC) scctions havc bccn invcstigatcd).
The computer-based design mcthod is iterative in nature and is remarkably effective and efficient. Commencing with an arbitrarily chosen initial 'trial' design, the synthcsis process determines the 'minimum-weight' structurc satisfying all of thc imposcd performancc and fabrication conditions without further designer intervention. The number of iterations required to achieve the optimal dcsign is generally small and almost totally independent of the complexity of the structurc.
Three different designs of a building framework are presented to illustrate the scope of the mcthod: limit-states dcsign using CISC sections; working-stress dcsign using AlSC scctions: and dcsign under elastic and plastic pcrformancc criteria using custom sections.
Key w0rri.s: steel. frameworks, standard scctions, custom sections. synthcsis, minimum weight, limit states, computers, automated.
Cet article donne un appcry sur I'optimalisation par ordinatcur de portiqucs plans en acicr. travail realist i I'Univcrsitk de Waterloo. Pour tout nombrc dc miscs en charge. Ic calcul de la structurc peut tcnir comptc dcs critkres dc rupturc Clastique et (OU) plastique conccrnant Ics contraintcs, dCplaccmcnts ct (ou) charges ultimcs. Dcs conditions peuvent etrc imposCcs lors dc la fabrication afin d'obtenir dcs klCmcnts continus et une structurc symCtriquc. Lcs dimensions dcs ClCmcnts pcuvcnt Ctrc constantes ou variables compte tcnu dc I'cxistence des scctions usucllcs. En dcrnier lieu. Ic calcul peut utiliser Ics sections standards spCcifiCcs par differentcs normes de calcul ( h datc, Ics sections dc catalogues CISC ("Canadian Institute of Stccl Construction") et AlSC ("American Institute of Stecl Construction") ont CtC utilisCes).
La mCthode de calcul utilisec par I'ordinateur est itCrativc ct particulikrcmcnt cfficacc ct rapidc. A partir d'un calcul approximatif, la mCthode de synthksc determine la structurc la plus ICgkre satisfaisant B toutes les cxigcnccs concernant la rksistance et la fabrication sans autres interventions du calculatcur. Lc nombrc nbcessaire d'itkration pour obtenir la solution optimale cst gCnCralemcnt petit ct Ic plus souvent indtpcndant de la complcxitC de la structurc.
Lcs calculs dc la structure de trois bitimcnts sont donnCs en cxcrnplc afin d'illustrcr la thCoric du calcul aux Ctats limites en utilisant les scctions du CISC; la thkorie du calcul dcs contraintes en utilisant Ics scctions dc I'AISC; Ics critkrcs dc rupturc des thCories Clastique ct plastique en utilisant des sections pcrsonncllcs.
Mots c1P.s: acier, structures, scctions usuclles, scctions pcrsonncllcs, synthksc. poids minimal. Ctats limitcs, ordinatcurs, automatisation.
[Traduit par la rcvuc]
Can. J. Civ. Ens. 11. 863-874 (1984)
Introduction The paper addresses the task faced by designers of
structures for which limit-states criteria must be satis- fied at one or more distinct loading levels. For example, the specified limit states may concern acceptable elastic displacements under service loads, acceptable elastic stresses under factored service loads, and adequate postelastic strength reserve of the structure under ulti- mate loads. Ideally, while satisfying the various per- formance criteria, the most economical design of the structure is sought.
The conventional approach to such design is to sepa-
rately proportion the structure to satisfy one set of per- formance criteria (e.g., stress limits), and to then mod- ify the structure to satisfy the one or more other sets of criteria that are of concern to the design (e.g., displace- ment limits, failure limits, etc.). A drawback of this approach, however, is that decisions taken at any one time to satisfy some of the performance criteria are usually made in the absence of explicit information as to their consequences for the other criteria. As such, they may result in the violation of criteria that were otherwise satisfied at a previous design stage. More- over, such an approach makes it difficult to have explic-
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y G
RA
NT
MA
CE
WA
N U
NIV
on
11/2
0/14
For
pers
onal
use
onl
y.

8 64 CAN. 1. CIV. ENG. VOL. l I . 1981
CONTINUOUS VARIATION c.1 (custom sections]
ciated with it. First, as it is generally impossible to uniformly scale the member sizes to achieve a standard- section design, stress redistributions will occur that may result in the violation of one or more of the ~erformance criteria. Second, there is no guarantee that the scaled
b l ~ ~ ~ ~ - 1 ~ 1 ;::~;;,R:ISCRETE design defines the minimum-weight standard-section structure.
lcustorn sections 1 Further studies by Lee (1983) and by Grierson and Lee (1983, 1984) extended the design &hod such that the sizes of the cross sections for the members of planar
( c l 1 TL [ ~ ; ; ; ~ ~ - O I S C R E T E frameworks can be taken as discrete variables to the
is londord s e c t i o n s ~ design. This capability allows the synthesis technique to be applied for two different design situations, de-
FIG. 1. Different types of member-sizing variables for pending on the nature of the prevailing limit-states cri- design. teria. First, for the case in which both elastic and plastic
performance criteria must be satisfied, the design cross it concern for design economy. At best, a somewhat section for each member is automatically selected from cumbersome trial-and-error process is required to among a specified set of regular-discrete sections (spe- achieve a reasonably efficient design. cifically, a set of discrete cross sections of different
An initial study by Grierson and Schmit, Jr. (1982) sizes but of the same shape; see Fig. I b ) . Second, for considered thin-walled structures comprised of bar, the case in which elastic stress and (or) displacement membrane, and (or) shear-panel elements under uni- axial stress, and developed a computer-automated synthesis capability whereby a minimum-weight struc- ture is found while satisfying all specified limit-states criteria simultaneously. For first-order behaviour (small-deformation theory) and proportional static loading, the limit states may involve ;ny combination of performance criteria concerning acceptable elastic stresses and displacements under service loads and ade- quate postelast~c strength reserve of the structure under ultimate loads. As well, fabrication conditions can be imposed to ensure member-continuity and structure- symmetry requirements. Commencing with an arbi- trarily chosen initial 'trial' design, the synthesis process determines the 'minimum-weight' structure without further designer intervention.
Further studies by Chiu (1982) and by Grierson and Chiu (1982, 1984) extended the design method to planar frameworks comprised of beam and column members under combined axial and bending stresses. These studies took simultaneous account of service and ultimate performance criteria, but considered the sizes of the cross sections for the members of the structure as continuous variables to the synthesis process (see Fig. 1, where the different types of member-sizing vari- ables considered herein are graphically illustrated). In theory, this design approach tacitly assumes the availability of custom-fabricated sections that have the exact size, stiffness, and strength properties required for the members of the minimum-weight structure.
criteria alone are to be satisfied, the design cross section for each member is automatically selected from among available commercial-standard sections (which do not obey a constant-shape rule as their size varies; see Fig. I L . ) . In the latter regard, the initial applications of the design method considered the wide-flange, tee, and double-angle steel sections specified by the Canadian Institute of Steel Construction (CISC 1980).
The strategy employed by the synthesis technique to classify the data bank of standard steel sections is quite general and independent of the units of measurement adopted for the design (Grierson and Lee 1984). This implies, then, that the design method may be directly applied for a variety of different steel codes (Canadian, American, British, etc.). To date, an ongoing study by Cameron (1984) has extended the synthesis capability to allow computer-automated design accounting for the standard steel sections specified by both ClSC (1980) and the American lnstitute of Steel Construction (AISC 1980).
The design method involves an iterative process having the following essential features: ( I ) for a given design (e.g., the initial 'trial' design), sensitivity analysis techniques are employed to approximate the performance constraints as linear functions of the member-sizing variables; (2) optimization techniques are applied to find an improved (i.e., lower weight) design; (3) sensitivity analysis is en~ployed again to update the performance constraints for the next weight optimization; and (4) the process is repeated until
Alternatively, the designer can scale up the continuous- weight convergence occurs hfter a number of design variable values found for the design to arrive at stages. commercial-standard sections for the members. This The design method is remarkably effective and effi- latter approach, however, has several difficulties asso- cient. The use of sensitivity analysis techniques permits
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y G
RA
NT
MA
CE
WA
N U
NIV
on
11/2
0/14
For
pers
onal
use
onl
y.

GRIERSON A N D CAMERON 865
the performance criteria for even the most complicated structure to be directly expressed explicitly in terms of the sizing variables for the design. The use of first-order Taylor's series approximations of the performance criteria to reduce them to linear functions of the sizing variables results in minimal computational effort for the algorithm applied to conduct the weight optimization for each design stage. The number of iterations required to achieve the optimal design is generally small and almost totally independent of the complexity of the structure. The first-order representations of the per- formance criteria are 'exact' at the optimal design stage and, therefore, an 'accurate' final design is rendered.
The essential details of the design method are described first, and then three example designs of a building framework are presented to illustrate the method.
The design problem All loads are static, and the distinct loading levels
associated with the various limit states of concern to the design are proportionally related to each other. The framework is discretized into an assemblage of tz pris- matic members, which may be of a variety of types (wide-flange beams, hollow-box columns, double- angle bracing struts, etc.). The design variable for each member i is its cross section area a,. In its general form, the minimum-weight design problem is
I ,
[ l a ] C w , n , I - I
Subject to:
[ Ib] 6 , s 6 , s 6 , ( j = I . 2. .... (1)
[ I d ] q,,,Sa,,,S&,,, (tn = I , 2, ..., p )
[ l e ] a , E A, ( i = I, 2, .... t ~ )
Equation [I a] defines the weight of the structure (wi is the weight coefficient for member i = material density x member length); [ I b] defines the d constraints on elastic displacements 6, due to service loads (the 'hat' symbol A denotes the specified limited values); [I c ] defines the s constraints on elastic stresses a, due to service loads (or due to factored service loads if yield- stress limit states are of concern to the design); [I clj defines the p ultimate-load constraints on the plastic- collapse load factors a,,,; [I e] specifies that the design cross-section area a , for each member i is to be selected from among a predetermined set of discrete cross- section areas A, = {a , , a? , . . .Ii. If the design is to be conducted for continuously varying rather than discrete
section sizes, [ l el is replaced by the size constraints
[ I f ] c;ri 5 a , 5 i; ( i = I , 2, ,.., t7)
where p, and ii are specified bounds on member cross- section areas.
The lower and upper bounds on displacements and stresses have negative and positive signs, respectively, to account for the two possible senses of response action (e.g., left or right sway, compressive or tensile stress). The compressive-stress bounds serve to guard against the local buckling of members and of the flange and web elements of cross sections. For the synthesis tech- nique to date, and herein, these limiting stress values are a priori calculated using assumed slenderness ratios and thereafter remain constant throughout the design history (Chiu 1982). An ongoing study is introducing the capability to progressively update the compressive- stress-bounds fk to reflect the actual melnber and section properties that prevail at each stage of the design history (Cameron 1984).
The positive-valued lower bounds on plastic-collapse load factors are typically taken to be the same limiting value $,,, = 9 (117 = 1, 2, ..., p ) for all ultimate-load constraints (e.g., 9 = 1.8 requires that the structure be capable of withstanding an 80% overload beyond the service-load level without failure occurring in any plas- tic mechanism mode). The corresponding upper bounds &,,, are somewhat superfluous to the design and may be taken arbitrarily large or omitted altogether (although it is possible to conceive of limiting the strength of a structure in certain failure modes).
If the structure is to be sized accounting for elastic limit states alone, [ 1 dl is omitted from the design for- mulation. Conversely, [ I b] and [ 1 c ] are omitted if only plastic limit states are of concern to the design. In fact, any combination of the performance constraints may be considered depending on the ci~.cumstances of the design.
Whenever only elastic limit states are of concern to the design, [ le] may involve either commercial- standard sections or regular-discrete sections (in the latter case, for each member i, the set A , refers to a range of cross sections of different sizes but of the same shape). However, to date for the synthesis technique, [ l e ] may involve only regular-discrete sections when- ever plastic limit states are of concern to the design. The exclusion of commercial-standard sections for this design situation occurs because of difficulties in classi- fying their stiffness and strength properties together in a common data bank (Lee 1983); future work is in- tended in this area. For the case in which section sizes are considered as continuous variables to the design, [ I f ] may be applied for any combination of performance constraints (Chiu 1982).
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y G
RA
NT
MA
CE
WA
N U
NIV
on
11/2
0/14
For
pers
onal
use
onl
y.

866 CAN. J . CIV. ENG. VOL. I I . 1984
Formulation of the explicit design problem In their present form, the performance constraints
[ I b], [ I c], and [ I 6] are only implicit functions of the sizing variables for the design. To facilitate the numerical implementation of the synthesis process, these constraints are formulated as explicit functions of the sizing variables through the use of sensitivity anal- ysis techniques. To this end, the stiffness-size, stress- size, and strength-size relationships for the members of the structure are first established. These relationships are developed in the following for a planar member under combined axial and flexural stresses.
Member stianess-size and stress-size relationships The (global-axis) stiffness matrix for a planar
member i can be expressed as
Setting a = 2 in (41 and substituting into 121 and 131, the stiffness matrix for mernber i is
and the corresponding stress matrix is
I61 s; = s:' + ~ p ~ ~ ~ ' ~ : ' ~ To facilitate the use of sensitivity analysis to formulate the explicit elastic performance constraints for the de- sign, instantaneous-linear forms of 151 and 16) are adopted at each stage of the synthesis process. From 151, for a known value of '1; = clp(e.g., pertaining to the initial 'trial' design). the stiffness-size relationship for member i is expressed as the linear function
[71 K, = (K:\ + ~ f k , ( l p ) ~ l ; = K , L ~ ;
[21 K , = K f a , + K41i where K ,is a constant matrix that is exact when o , = LIP, but only approximate otherwise (the exception being
and the corresponding stress matrix can be expressed as for an axial truss member, in which case K , = K:\ is
[3 1 S i = sf + s ~ ~ , always exact). Similarly, from [6], the stress-size re- lationship for member i is expressed as the linear
where K:, S: and K:, S: are constant matrices that function correspond to the axial and bending stiffness and stress properties for the member, respectively; n i and Ii are the 181 S; = S; + ~ P ~ ~ ~ ( L l ; ) - ~ ~ . 5 ~ l ~ = sf + s,!!~; - -
cross-section area and moment of inenia. respectively; where S , i s a constant matrix that is exact when = and y, defines the position of the neutral axis (the max- but only approximate otherwise. Note that [8] is a zero- imum distance to the extreme fibres of the cross sec- order function of (1; for an axial truss member, i.e., S i tion). In general, 1; and y; are related to ni as
= s ? .
where the coefficients ki and n, depend on the shape of the cross section (hollow-box, wide-flange, etc.), and the exponent parameter x depends on the way the cross- section shape varies with changes in section size. When x = 1 , [4] refers to thin-walled members of fixed over- all cross-section dimension (hollow tubes of fixed out- side radius, open channels of fixed height and width, etc.). When x = 2, the cross section maintains a con- stant shape as the section size varies (hollow-box, wide- flange, etc., sections that are custom fabricated in ac- cordance with a constant-shape rule). When x = 3, the height of the cross section varies whereas all other dimensions remain fixed (plates, etc.).
It is convenient to set x = 2 in [4] since, then, the coefficients k, and n; are dimensionless and funda- mental stiffness and stress properties for each member i can be established without concern for the units of measurement adopted for the structural design (metric, imperial, etc.). In fact, even though commercial- standard sections do not obey exactly a constant-shape rule as their size varies, Lee (1983) and Grierson and Lee (1984) have shown that this choice for the value of x leads to a simple and effective classification scheme for standard steel sections that is independent of the governing design code (Canadian, American, etc.).
Metnber stt.etrgth-size relatiotlskil~ To formulate postelastic strength as a function of
cross-section area for a planar member i under com- bined axial and flexural stresses, a piecewise-linear yield condition is adopted to govern plastic behaviourat the two mernber end sections j and k (in keeping with simple plastic theory, plastic behaviour is assumed con- centrated at the end sections of members). The vector of plastic capacities defining the strength of the member can then be expressed as
where the component entries of the subvectors R , = R I are functions of the 'principal' axial and (or) flexural plastic capacities N, and M, for the member. For a member under axial stress alone R: = (N,, N,; N,,, N,], while R,' = [M,, M,; M,, M,] for a mernber under flexural stress alone. (The duplication of the principal plastic capacity quantity at each member end section reflects the fact that there are two yield-point states there, depending on the sense of action of the stress resultant, e.g., tension or compression.) For a member under combined axial and flexural stresses R: = R: = [ r , , r ? , . . . , r,,, . . .], where each entry r-,, is the orthogonal distance from the origin of the stress space for the cross section to the qth linear yield surface of the piecewise-
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y G
RA
NT
MA
CE
WA
N U
NIV
on
11/2
0/14
For
pers
onal
use
onl
y.

GRIERSON A N D CAMERON 867
linear yield condition (see, e . g . , Fig. 611). Moreover. each entry r,, is a fixed function of the principal plastic capacities N,, and MI, for all cross sections having the same shape, i .e. ,
[ I01 r'/ = F<, (NI>, MI>) ((1 = 1 , 2, ... )
Chiu (1982) gives the actual formulae [ l o ] for a range of cross-section types and piecewise-linear yield conditions.
T o facilitate the use of sensitivity analysis to formu- late the explicit plastic perfor~nance constraints for the design, [9] is formulated as an instantaneous-linear function of (li at each stage of the synthesis process, as follows. The axial plastic capacity N,,i for member i is the exact linear function of the cross-section area (ri.
1 1 1 1 N , , = u , a i
where a, is the material yield stress. For a constant- shape section, the tlexural plastic capacity M,, is related to (li as
and the stress constraints [ I c ] as
where the superscript " indicates known quantities eval- uated for the current design stage (e.g., the initial 'trial' design), and the s, are the sizing variables to the next weight optimization.
The displacement and stress gradients in 1161 and [I71 are evaluated using 'virtual-load' sensitivity anal- ysis techniques in conjunction with elastic structural analysis (Fleury and Sander 1978). For each vector P of applied loads, finite-element elastic analysis of the cur- rent structure is conducted to find the vector of nodal displacements
where, from [7] and [15] ,
where the coefficient rrr, is dimensionless and depends is the elastic stiffness matrix for the structure. only on the shape of the cross section. For a known Each displacenlent 6, and stress cr, is related to the value of cr, = a?, [13] is expressed as a linear function nodal displacelnents u from 1\81 as of cli as
[ 2 0 ~ , b ] 6, = b r u u A = t r u [I31 M,,; = ~ , r r r ~ ( c ~ P ) " ~ ~ z , = uvnzj'bi
where the coefficient m :is exact when cli = UP, but only approximate otherwise. Then. from 191, [ 1 1 I . and [ 13 1 . the strength-size relationship for member i is expressed as a linear function of (1, as
For a member under axial stress alone R:' = u , [ l , I ; l , l ] , whi leRTT- - u,m j': [ I , I; I , I ] for a member under flexural stress alone. For a member under combined axial and flexural stresses R:' = R*: ' = [ r , , r:, . . . , ri:, . . . I I where, from [ l o ] , each entry = F,[u,, nz,:"].
where b, is a specified vector that identifies the particu- lar displacement 6; of concern to the design (e .g. , from [ ~ O U ] , if b,! = 10. I , 0 , ..., 01 then 6, = 1 1 2 , the displace- ment corresponding to degree-of-freedom 2). and tA is row k of the (global-axis) stress matrix for the member associated with the stress uA (i.e. , if member i is asso- ciated with cr,, t , is row k of the stress rnatrix S i defined by [8] ) . Once specified. the vector b, remains constant for the design. As well, the vector tA is invariant for trusses comprised of axial members alone (in this case, tA is row k of the topological matrix for the truss multi- plied by Young's modulus for the material and divided -
Explicit elastic perfor-rrrance cor~.strr~irzt.s by the length of member k, i.e., for i = k in 181, tA is Recognizing that elastic displacenlents and stresses row k of the constant stress matrix S: ). For a flexural
vary inversely with the member cross-section areas (I,. structure, however, the vector t~ is a function of the corresponding 'good' quality performance constraints neutral-axis position for the member cross section asso- are achieved by formulating them as explicit-linear ciated with the stress a,. and therefore it varies as the functions of the 'reciprocal' sizing variables. design changes over the synthesis history.
From [ 18 1 -[20], each displacement gradient in 1161 11.51 x r = l / ~ l i ( i = 1, 2 , . . . , 1 ) is found as
T o this end, first-order Taylor's series expansions are all
employed to formulate the displacement constraints [21] 1 1 h] as
($I0 = b; (=I -
dK 1 , " a6 o - -~:(K-'-U)O d , ~ , = -o(~t, K,u)"
[I61 6 , < 61 + C (2) (1, - ,I-:) r 8, X,
1 - 1
J = I , 2 . 1 ) and each stress gradient in [I71 is found as
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y G
RA
NT
MA
CE
WA
N U
NIV
on
11/2
0/14
For
pers
onal
use
onl
y.

868 CAN. J . CIV. ENG. VOL. I I . 1984
du O of 12.51 and [26] improves over the synthesis history. (They are 'exact' constraints at the final design stage
, dK 1 when weight convergence occurs since there is no = -t, (K- ' - ax, 11)' = O ( U : K , U ) O change thereafter in the sizing variables x, .)
-1 , where u, and u, are vectors of 'virtual' nodal displace- ments associated with vectors b j and t, of 'virtual' loads, i.e.,
Equations 1211 and 122) are based on the assumption that the vectors P , b,, and t, are all invariant with changes in the design; i.e., dP/dx, = db,/ifx, = dt,/dx, = 0. This recognizes that the applied load vec- tor P excludes structure self-weight, that b, is always a constant vector, and that t, is a constant vector for truss structures; the error inherent in this assumption for a vector t, associated with a flexural structure is negli- gible, particularly at the final stage of the synthesis history (Chiu 1982). Note that the evaluation of the gradients through the right-hand sides of 121 1 and 1221 involves minimal computational effort beyond the basic analysis [18] conducted to find the displacements u, since each member stiffness matrix K, is already estab- lished and the inverse (or factorized) form of the structure stiffness matrix K-I required to find the 'virtual' displacements u, and 11, through 1231 is already available from [ 181.
From [ 191 -[23], the displacement and stress values 6Pand u r for the current design that appear in 1161 and [ 171 can be expressed as
Therefore, from [ 161, [ 171, and 1241, and adopting the concise notation d: = (d6,/dx,)O and s$ = (ifuL/dx,)O, the 'explicit-linear' performance constraints on elastic displacements are
I
12.5) $, 5 C d:x, 5 6, ( j = I , 2, ..., d ) 1 - 1
and on elastic stresses,
in view of the formulation in terms of reciprocal sizing variables x,, 12.51 and 1261 are 'good' quality approxi- mations of the actual performance constraints [ I b] and [ I c]. lil fact, the quality of the approximation varies inversely with the degree of statical redundancy of the structure ([25] and 1261 are 'exact' and 'invariant' con- straints for statically determinate structures). More- over, for statically indeterminate structures, the quality
Explicit plastic perfortn~~nce con.strvlint.s Consistent with the elastic performance constraints,
the constraints on plastic-collapse load factors are also formulated as linear functions of the reciprocal sizing variables x, by employing first-order Taylor's series to express [ 1 d] as
where, again, the superscript " denotes known quan- tities evaluated for the current design stage, and the xi are the sizing variables to the next weight optimization.
The load-factor gradients in 1271 are evaluated using sensitivity analysis techniques in conjunction with plastic-collapse load analysis. For each load case P , finite-incremental plastic analysis (Franchi 1977) of the current structure is conducted to find the collapse-load factor
1281 a,,, = RTA, , , = C R;'A,, , 1 - 1
where A,,, is the vector of rnember plastic deforrnation rates characterizing the 'critical' collapse mechanisnl tn
that forms under factored loads c-u,,,P (the subvector A,,,, corresponds to member i ) , and R is the vector of plastic capacities for the members of the structure (the sub- vector R , corresponds to member i; see 191).
From [ 141, [ 1.51, and 1281, each load-factor gradient in 1271 is found as
which r+ecognizes !hat for fixed structure topology the vector A,,, (hence A,,,,) is iqvariant with changes in the design, i.e., dA,,,/dx, = dA ,,,, /ax, = 0.
From 1281 and [29], the collapse-load factor value a:, for the current design that appears in 1271 can be expressed as
Therefore, from 1271 and 1301, and adopting the concise notation p:,, = ( d a , , , / d ~ , ) ~ , the 'explicit-linear' per- formance constraints on plastic collapse load factors are
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y G
RA
NT
MA
CE
WA
N U
NIV
on
11/2
0/14
For
pers
onal
use
onl
y.

Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y G
RA
NT
MA
CE
WA
N U
NIV
on
11/2
0/14
For
pers
onal
use
onl
y.

870 C A N . J . CIV. ENG. VOL. I I . 1 9 8 4
I 2 1 9 0 m m 1480 in.) ELEMENT 0 MEMBER GROUP
I b l
I : DEAD + L I V E XI: DEAD+ WIND I L E F T I m : DEAD + WIND (RIGHT]
2Pc 2Pr 2Pc
D E A D LOAD D = 4 . 4 4 8 k N ( 1000 I b l
L I V E L O A D L = 17.792 k N ( 4 0 0 0 1b1
W l N D ( T O P I WT:15.880 kN I 3 5 7 0 I b l
IP : DEAD+LIVE+ WlND (L I W l N D I B O T T O M I Wg: 3 9 . 6 8 0 k N I 8 9 2 0 I b I
T: DEAD+LIVE+WIND I R I
FIG. 3. Two-storey frame: ( a ) geometry: ( b ) loading.
and member section properties) plus the performance and fabrication conditions for the design. For the case of design using commercially available standard sec- tions, the standard-section category for each member is specified (i.e., wide-flange or tee, etc.). Finally, an arbitrarily chosen initial 'trial' design of the structure is specified.
For each current design stage (e.g., the initial 'trial' design), the weight optimization problem 1321 is formu- lated using the previously described sensitivity analysis techniques. To ensure the fabrication requirements re- lating to member continuity and structure symmetry, the formulation is done in terms of a corresponding reduced set of independent sizing variables through the use of a 'design-variable-linking' technique (Schmit and Miura 1978). Recognizing, with a view to numer- ical efficiency, that only a limited number of the per- formance conditions will actually control the design, a 'constraint-selection' technique (Lee 1983) is applied to retain only those conditions in [32] that are potentially 'active' for the current design stage (the deleted con- ditions are continuously monitored throughout the syn- thesis history and added to the constraint set if and when they become active for a subsequent design stage).
The weight optimization problem [32] is solved for each design stage using a 'generalized optimality criteria' technique due to Fleury (1979). The resulting design solution is then evaluated to determine if con- vergence of the synthesis process has occurred. This involves checking two different conditions. First, the
feasibility of the design is checked (as a consequence of the approximate nature of the performance conditions in [32], it is quite possible for constraint infeasibilities to occur at intermediate stages of the synthesis history). Second, the weight of the current structure is compared with that for previous design stages (this involves com- paring the design weights for a number, e.g., three, of successive stages). If there are no appreciable constraint infeasibilities and weight convergence has occurred, the svnthesis Drocess terminates with the member sizes corresponding to the minimum-weight structure. The final design output of the STRUSY program includes the activity of the performance conditions, the cross- section moment of inertia and area for each member and, for the case of design using standard steel sections, the corresponding standard-section designation accord- ing to the prevailing steel design code (e.g., CISC W460 x 61 or AISC W18 x 40, etc.). If design con- vergence has not occurred. then. as described in the " following, the synthesis p;ocess' continues on to the next design stage.
If design convergence does not occur after solving [32], the weight optimization problem is updated for the next design stage (see Fig. 2). To avoid oscillating or divergent behaviour of the synthesis history, which may occur at intermediate design stages as a consequence of the approximate nature of the performance conditions, a 'move-limit' technique (Lee 1983) is applied that takes a weighted average of the design points existing before and after solving [32] as the basis for the up- dating. Having the corresponding cross-section areas a;, the stiffness, stress, and strength properties of the members are first updated through [7], [8], and [14], respectively. Then, the previously described sensitivity analysis techniques are used again to update the per- formance gradients d;, si, and p:,, in [32]. The pre- viously noted 'constraint-selection' technique is applied again to retain only potentially active performance con- straints. For the case of design for standard sections, the previously noted 'section-selection' technique is ap- plied to identify the new sets of sections X i in [32c]. Finally, the updated weight optimization problem [32] is solved and the design convergence conditions are checked for the resulting solution to determine whether to terminate or continue the synthesis process.
Example applications A variety of different designs of the pin-support
frame in Fig. 3a is presented in this section to illustrate the synthesis technique and associated computer system STRUSY. Specifically, for the five independent load- ing schemes indicated in Fig. 3b, the following three design cases are considered: case 1 : limit-states design using CISC standard sections; case 2: working-stress design using AISC standard sections; case 3: design
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y G
RA
NT
MA
CE
WA
N U
NIV
on
11/2
0/14
For
pers
onal
use
onl
y.

under elastic and plastic performance conditions using regular-discrete sections. Moreover, for each case, a corresponding design for which member sizes are taken as continuous variables is also presented for comparison purposes.
The dead-, live-, and wind-load values given in Fig. 3b define the specified service-load level for the frame. (The coefficients y, ( i = 1 , 2, 3, 4) character- izing the five loading schemes take on different values depending on the design case; see corresponding subsections in the following.)
A number of assuniptions common to all three design cases are made, namely: shcar stress and P-h effects are negligible: bending niembers are braced against lateral buckling: axial nienibers are braced against buckling due to slenderness effects; and local buckling of member cross sections does not occur. Research to explicitly incorporate these various dcsign aspects in the synthesis technique is either presently ilnderway (Cameron 1984) or is anticipated in the futurc.
The frame is discretized into 12 elements (denoted by in Fig. 3 a ) which have end sections that correspond
to joint connections and load points. Then. to satisfy conventional fabrication requirements concerning member continuity and structure symmetry. the 12 ele- ments are linked together into four independent member groups (denoted by 0 in Fig. 3rr); i.e., the girder for each storey is required to be a prismatic member (having a common cross section throughoi~t its length), and the two colulnns for each storey are required to be identical prismatic members.
Stress and displacement performance conditions are imposed for all three design cases. Member stresses under the five loading scheliles are constrained at all joint connections and load points, for a total of 80 stress conditions (the stress limits take on different values depending on the design case; see corresponding sub- sections in the following). The mid-span vertical de- flection of each girder under loading scheme 1 is limited to 11360 of its span length. i.e., 34 mm (1.33 in.). The lateral deflection of each storey under loading schemes 11 and 111 is liniited to 11400 of the height of the frame at that level, i.e.. 11.5 mm (0.45 in.) for the bottom storey and 19 mm (0.75 in . ) for the top storey. For design case 3. load-factor performance conditions are additionally imposed. Namely, under loading schemes 1, IV, and V, the collapse-load factor for the frame is specified to be not less than 2.35 (i.e.. the frame is required to be capable of withstanding a 135% overload beyond the specified service-load level without failure occurring in any plastic mechanism mode).
Case I : ClSC litnit-str~tes clesigtz In keeping with the limit-states design philosophy
advocated by the Canadian Standard CAN3-S 16.1 -M78
.ND CAMERON 87 1
for steel structures (CISC 1980). the stress and dis- placement performance conditions are imposed at two distinct loading levels. Namely. stresses arc liniited under Factored service loads while displaccmcnts are limited under unfactored scrvice loads. For thc stress conditions, the design loads are defined by setting y, = y, = 1.25, yl = 1.50. and y, = 0.7 X 1.5 = 1.05 for the five loading schemes in Fig. 3h. For the displace- ment conditions. the design loads are defined by setting y, = y2 = I .O for loading schemes 1 . 11, and 111 in Fig. 3b.
All niembers of the frame are specified to be of the samc steel grade: density = 7.85 X lo-" kg/nini' (0.284 Ib/in3); Young's modulus E = 2 X IOT MPa (29 x 10" psi); yield stress F , = 300 MPa (43.5 X 10' psi). Allowable stresses for the members are limited to 90% of the steel yield stress, i.c.. 270 MPa(39.2 x lO' psi).
The design cross section for each member is to be selected from among the standard wide-flange (W or WWF) sections specified by ClSC (1980). The corre- sponding data bank of sections, and the means by which it is referenced during the synthesis process. is presented in detail by Lee (1983) and by Grierson and Lee ( 1984).
Upon applying the STKUSY program to conduct the synthesis process (Fig. 2). the niininium-weight structure is found after seven design stages requiring a total CPU time of 12.1 s on an IBM 4341 coniputer (University of Waterloo). The ClSC design standard sections found for the ~nelnbers are given in Table 1. The history of the synthesis process is illustrated in Fig. 4. The convergence to the minimum-weight structure is nionotonic, except at the transition between the first design phase involving contini~ous sizing variables and the second design phase involving discrete standard sections as sizing variables (note from Fig. 4 that niono- tonic convergence behaviour of the synthesis process is restored immediately after the transition).
For the final minimum-weight structure, the stress constraints at nodes 3 and l l of elements 5 and 6. respectively. are active under loading scheme 1. Also, the vertical displacement constraint at node 7 of the top-storey girder is active under loading scheme I . as is the horizontal displacement constraint at node 2 of the bottom-storey girder under loading scheme 11. A number of other stress and displacement conditions are potentially active for the final design.
A corresponding synthesis history for which member sizes were considered as continuous variables to the design is also illustrated in Fig. 4. In this instance. the fundamental shape and stiffness properties of the indi- vidual member cross sections remain the salile for all design stages. To provide a basis for comparison, these properties were taken to be those of the mininium- weight ClSC standard section design. Compared to the
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y G
RA
NT
MA
CE
WA
N U
NIV
on
11/2
0/14
For
pers
onal
use
onl
y.

C A N J CIV ENG V O L I I. 1'184
TABLE 1 . Design cross sections for minimum-weight frame
Design Design case 1 Design case 2 case 3
Member Designation Area Designation Area Area group Element No. (CISC, metric) (mm') (AISC. imperial) (mm') (rnrn')
Y CONTINUOUS SECTIONS + CISC SECTIONS
W TO DISCRETE SIZING VARIABLES
3
s 5 0 0 0 u 3
L 3
4 0 0 0 FINAL WEIGHT
---x FINAL WEIGHT
3 0 0 0 3 3 1 0 5 kq 17316 I b l
IIIIIIIIIII 0 1 2 3 4 5 6 7 8 9 1 0
DESIGN STAGE
FIG. 4. Synthesis history for design case 1
final design using standard sections, the active stress and displacement constraints for this design are the same but. as expected, the structure weight is less.
Case 2: AlSC war-kirlg-stress clesigrl For this design case, the stress and displacement per-
formance conditions are both imposed at the specified service-load level in keeping with the working-stress design philosophy advocated by AlSC (1980). For the stress conditions. the design loads are defined by setting y , = y2 = I .0 and y, = y, = 0.75 for the five loading schemes in Fig. 3b. The corresponding loading schemes I . 11, and 111 also define the design loads for the displacement conditions.
For the steel grade adopted for the design, the clensity and Young's modulus arc the same as for clesign case 1 but the yield stress F , = 248 MPa (36 x 10' psi). Allowable stresses are limited to 60% of the steel yield stress, i.e., 149 MPa (21.6 X 10"si).
The design cross section for each member is to be
selected from among the standard wide-flange (W) sections specified by AlSC ( 1980). The corresponding section data bank and section-selection technique are presented in detail by Cameron (1984).
Upon applying the STRUSY program. the rninimum- weight structure is found after seven design stages re- quiring a total CPU time of 14.4 s on an IBM 4341 computer. The AlSC design standard sections found for the members are given in Table 1 . The history of the synthesis process is illustrated in Fig. 5. As for design case I , the convergence to the minimum-weight structure is essentially monotonic.
For the final minimum-weight structure, the stress constraints at node 3 for elements 1, 5 and nodc I I for elements 4, 6 are active under loading scheme 1. As well, the horizontal displacement constraint at node 2 of the bottom storey is active under loading scheme 11. A number of other stress and displacement conditions are potentially active.
The synthesis history for a corresponding contin- uous-variable design is also illustrated in Fig. 5. The fundamental shape and stiffness properties of the member cross sections Ihr this design remained con- stant throughout the synthesis history and were taken to be those of the minimum-weight AlSC standard section design. Compared to the design using standard sec- tions, this design has the sanle active performance conditions but, as expected. lower structure weight.
Case 3: el~~.stic.-plnstic desigtl For this design case, the stress and displacement
performance conditions are imposed at the same two loading levels as were specified for design case I. In addition, plastic-collapse load-factor performance con- ditions are also imposed. For these conditions. the design loads are defined by settiilg y , = y2 = y, = 2.35 and y, = 0.7 x 2.35 = 1.65 for loading schemes 1 , IV, and V in Fig. 3b.
The steel grade and the allowable stress limit for the members are the same as those specified for design case I .
The members of the frame are each specified to have a wide-flange cross section having the 'constant-shape'
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y G
RA
NT
MA
CE
WA
N U
NIV
on
11/2
0/14
For
pers
onal
use
onl
y.

GRIERSON A N D CAMERON
t +- CONTINUOUS SECTIONS 8 0 0 0 +- AlSC SECTIONS
+- CONTINUOUS SECTIONS
-+ REGULAR- DISCRETE SECTIONS INITIAL WEIGHT
7465.2 kg 116458 1b) I INITIAL WEIGHT
7465.2 k~ U 6 4 5 8 l b l
- FINAL WEIGHT ,<,a ,&",7rn\,&,
FINAL WEIGHT .,.,L..L"*,I lU,,",
3414.4 kg 17527 Ib)
- 6 0 0 0 I- I
4 n 3
TRANSITION FROM CONTIHUOUS TO DISCRETE SIZING VARIABLES
U
2 4 0 0 0 - FINAL WEIGHT I- 3694.1 kg (8144 I b l V)
FINAL WEIGHT
2 0 0 0
I I I I I I I I I I 0 1 2 3 4 5 6 7 8 9 1 0 )
DESIGN S T A G E
3 0 0 0
~ ~ l l l l l I I l I I I 1 I ~ 0 I 2 3 4 5 6 7 8 9 1 0 1 1 I 2 1 3 1 4
DESIGN S T A G E
3592.5 kg 119201 -
FIG. 7. Synthesis history for design case 3. FIG. 5. Synthesis history for design case 2.
weight structure found for design case 1. They remain constant throughout the synthesis history for this design case 3.
For the plastic analyses that are conducted over the synthesis history to establish the load-factor per- formance conditions governing the design, ideal plastic behaviour is assumed confined to the element end sec- tions defined by joint connections and load points. The eight-sided piecewise-linear yield surface in Fig. 6b is adopted to govern plastic behaviour at each such section (Chiu 1982); the orthogonal distances r., , r 2 , . . . , r8 from the origin of the stress space to the linear yield modes are fixed functions of the principal flexural and axial plastic capacities M, and N, for any section that maintains a constant shape regardless of its size (see [ lo]) .
The design cross-section areas of the members are to be selected from amone an available set of 180 discrete
u
area values; commencing with a lower-bound area of 2000 mm', the discrete area values increase in in- crements of 500 mm' up to an upper-bound area of 92 000 m m v t h e smallest and largest area values are consistent with the range of wide-flange sections specified by CISC (1980)).
Upon applying the STRUSY program, the minimum- weight structure is found after 14 design stages re- quiring a total CPU time of 42.6 s on an 1BM 4341
FIG. 6. Wide-flange cross sections for design case 3: (a) constant-shape parameters; (6) piecewise-linear yield condition.
characteristics indicated in Fig. 6a ; for the given values of the three constants CI, C7, and Cj, and any cross- section area a , the parameters k, m, and n directly define the stiffness, strength, and neutral-axis position of the corresponding section. These section properties were chosen to correspond to those of the minimum-
computer. The discrete design cross-section areas found for the members are given in Table I . The history of the synthesis process is illustrated in Fig. 7 (the nonmonotonic convergence behaviour at intermediate design stages occurs as a consequence of new plastic- collapse load-factor constraints becoming active in the
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y G
RA
NT
MA
CE
WA
N U
NIV
on
11/2
0/14
For
pers
onal
use
onl
y.

874 CAN. J . CIV. ENG. VOL. I I . 1984
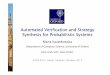
MODE I ILOAD CASE 11 MODE 2 l LOAD CASE 21
i a ~ = 2 ~ 3 0 a C = 2.54) 1 1 : : ~ ~ : w ~ MODE 3 ILOADCASE I 1 MODE 4 ILOAD CASE 1 1
a,: COLLAPSE-LOAD FACTOR FOR DISCRETE SECTIONS
a D = 2 . 5 2 2 a, - COLLAPSE-LOAD FACTOR ac = 2.350 FOR CONTINUOUS SECTIONS
MODE 5 ILOAD CASE I )
FIG. 8. Critical plastic collapse modes for design case 3
design). The five mechanisms shown in Fig. 8 were identified as the most 'critical' failure modes for the frame at various stages of the synthesis history (see Fig. 7 ) ; the collapse-load factors indicated in Fig. 8 are those prevailing for the various rnechanis~n modes at the final stage.
There are no stress constraints active for the final minimum-weight structure. The horizontal displace- ment constraint at node 2 of the bottom storey is active under loading scheme 11. As well, plastic collapse mode 5 in Fig. 8 is active under loading scheme I (the corresponding load factor is not exactly equal to the limit value of 2.35 because of the discrete nature of the member-sizing variables). A number of other per- formance conditions are potentially active for the final design.
The synthesis history for a corresponding contin- uous-variable design is also illustrated in Fig. 7. The fundamental section properties for this design were taken to be the same as those specified for the discrete section design (Fig. 6). Compared to the design using discrete sections, this design has the same active per- formance conditions but, as expected, lower structure weight.
Concluding remark Through the coordinated use of elastic and plastic
analysis, first-order sensitivity analysis, and continuous or discrete optimization techniques, the described de- sign method provides an effective and efficient means to optimally size building frameworks under multilevel performance conditions using custom or standard mem- ber sections.
Acknowledgements The work reported in this study was sponsored by the
Natural Sciences and Engineering Research Council of Canada under Grant A5306. The authors gratefully acknowledge the contributions to the study made by Jack Celej, Research Assistant, Department of Civil Engineering, University of Waterloo.
AISC. 1980. Manual of steel construction. 8th ed. American Institute of Steel Construction, New York, NY.
CAMERON, G. E. 1984. Optimal structural synthesis of planar trusses subject to Canadian and American dcsign standards using commercially available standard steel sections. M.A.Sc. thesis, University of Waterloo. Waterloo, Ont., Canada.
CHIU, T. C. W. 1982. Structural synthesis of skeletal frame- works under scrvicc and ultimate performance constraints. M.A.Sc. thesis, University of Waterloo, Waterloo. Ont., Canada.
CISC. 1980. Handbook of steel construction. 3rd ed. Canadi- an Institute of Stccl Construction. Willowdale. Ont.
FLEURY, C. 1979. Structural weight optimization by dual methods of convex programnling. lntcrnational Journal of Numerical Methods in Engineering, 14, pp. 1761-1783.
FLEURY. C., and SANDER. G. 1978. Structural optimization by finite clcments. LTAS Report SA-58. University of Liege. Liege. Belgium.
FRANCHI. A. 1977. STRUPL-ANALYSIS: Fundamentals for a general software system. Ph.D. thesis, University of Waterloo. Waterloo, Ont., Canada.
GRIERSON, D. E.. and CHIU. T. C. W. 1982. Synthesis of frameworks under multilevel performance constraints. NASA Conference Proceeding 2245.
GRIERSON, D. E.. and CHIU, T. C. W. 1984. Optimal synthesis of frameworks under multilcvcl performance constraints. Journal of Conlputers and Structures, 18(5), pp. 889-898.
GRIERSON, D. E., and LEE. W. H. 1983. Discrctc optimi- zation of frameworks under elastic and plastic performance constraints. Proceedings of the Michael R. Horne Confer- ence on Instability and Plastic Collapse of Steel Structures, University of Manchestcr. England. pp. 130- 139.
GRIERSON, D. E.. and LEE, W. H. 1984. Optimal synthesis of steel frameworks using standard sections. Journal of Structural Mechanics. 12(3), in press.
GRIERSON, D. E.. and SCHMIT, L. A., JR. 1982. Synthcsis under service and ultimate performance constraints. Journal of Computers and Structures, 15(4). pp. 405-417.
LEE, W. H. 1983. Optimal structural synthesisof frameworks using discrete and commercially available standard sec- tions. M.A.Sc. thesis, University of Watcrloo, Waterloo, Ont., Canada.
SCHMIT, L. A, , JR.. and MIURA, H. 1978. An advanccd structural analysis/synthesis capability-ACCESS 2. In- ternational Journal of Numerical Methods in Engineering, 12, pp. 353-377.
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y G
RA
NT
MA
CE
WA
N U
NIV
on
11/2
0/14
For
pers
onal
use
onl
y.