Embed Size (px)
Citation preview

28
CHAPTER 3
MATHEMATICAL MODELING OF HYDEL AND STEAM
POWER SYSTEMS CONSIDERING GT DYNAMICS
3.1 INTRODUCTION
This chapter focuses on the mathematical state space modeling of
all configurations involved in both single machine and multimachine hydel
and steam power systems considering the effect of respective governor -
turbine dynamics. Based on the state variables selected, the state matrices are
developed for all the models considered. The damping controller model is
also explained in this chapter.
3.2 POWER SYSTEM MODEL INVESTIGATED
A classical model for synchronous generator is developed with the
following assumptions (Prabha Kundur 2008).
1. The mechanical power input is taken as constant.
2. Natural damping (D) in the system is included in modeling.
3. The generator is modeled as a constant voltage source behind a
transient reactance.
A worst case analysis with the following modified assumptions is
incorporated in the modeling of the system and in the simulation experiments
conducted in this research work.

29
1. The mechanical power input (GT dynamics effect) variations
are included in the modeling.
2. Natural damping (D) in the system is assumed to be very
negligible.
The third assumption is incorporated in this work, as considered in
the classical model.
Figure 3.1 Single machine infinite bus power system model
Figure 3.1 represents the single machine infinite bus power system
model.
This model is developed by assuming the generator with constant
voltage source behind a transient reactance Xd’. Xd’ represents the direct axis
transient reactance of the synchronous generator. Here the generator (hydel or
steam) supply power to the infinite bus through an external impedance Z.The
generator terminal voltage is represented by VT.
Figure 3.2 represents the three machine nine bus power system
model taken for analysis in this work.

30
Figure 3.2 Three machine nine bus power system model
For all the mathematical modeling and simulation, the Heffron-
Phillips block diagram that describes the complete system dynamics of
synchronous generator has been implemented in this work. Figure 3.3
represents the Heffron-Phillips block diagram of the synchronous generator.
Figure 3.3 Heffron-Phillips generator model with PSDC

31
Here the model is equipped with PSDC in the excitation feedback
loop to provide supplementary signal to the system. The block EXC(s)
represent the excitation system model provided in the system. The IEEE Type
1 excitation and IEEE ST1A type excitation system models are used in this
work (IEEE Standards 2005).The detailed explanations of these two types are
explained in section (3.4) of this chapter.
All the data used for simulation of test power systems are listed in
Appendix 2 of this work (Anderson and Fouad 2008).
3.3 DAMPING CONTROLLER MODEL
The basic function of a power system damping controller is to
provide required damping to the electromechanical oscillations by controlling
its excitation using auxiliary stabilizing signal. The damping controller model
is represented in Figure 3.4. It consists of the washout block, gain block and
the cascaded identical phase compensation block(Bikash Pal and Balarko
Chaudhuri 2005).The Gain (Ks) and the time constants of the phase
compensation block are tuned effectively, so that the damping controller
provide the required damping torque to damp the power oscillations. The
input to the controller is the rotor speed deviation and output is the
damping control signal ( UE) given to generator- excitation system feedback
loop.
Figure 3.4 Power system damping controller model

32
The transfer function of the damping controller model is given by
w 31s
w 2 4
U sT 1 sT1 sTE K1 sT 1 sT 1 sT
(3.1)
where Ks = Damping controller gain
Tw = Washout time constant
T1, T2, T3, T4 = Time constants of the damping controller
The washout block functions as a high pass filter, which prevents
steady changes in speed from modifying the field voltage. The washout time
constant may be anywhere in the range of 1 to 20 seconds (Prabha Kundur
2008,Abido 2002, Shayeghi et al 2008).Tw is taken as 20 seconds in this
work.
3.4 STATE SPACE MODELING OF SINGLE MACHINE
HYDEL AND STEAM POWER SYSTEMS
The state space representation of power system provide an effective
and compact way to model and analyze the small signal stability of the system
models considered.
The dynamic linearized state space equation used for modeling the
power systems is given by
x Ax Bu (3.2)
where x = State variable vector
A, B = State matrix and Input matrix respectively.

33
3.4.1 Modeling of Single Machine Hydel Power System
In all the classical model analysis of single and multimachine
systems, the mechanical input power is assumed as constant. But in this work,
hydel governor and turbine model (mechanical power input) is included along
with the hydel generator model for mathematical modeling, simulation and
analysis.
In case of single machine hydel power system modeling, a 247.5
MVA, 16 KV, 180 rev/min hydel generator equipped with governor and
turbine is taken as the test system. In this work, the following two hydel
models are taken for analysis.
1. Hydel model (H1)
2. Hydel model (H2)
In H1 model, hydel generator is equipped with hydel governor and
turbine. The transient droop compensation block is not included in the hydel
governor model. The IEEE Type 1 excitation (rotating exciter type) is taken
in this model.
In H2 model, hydel generator is equipped with hydel governor and
turbine. The transient droop compensation block is included in the hydel
governor model. The IEEE ST1A excitation (static exciter type) is taken in
this model.
3.4.1.1 Hydel system H1 model
Figure 3.5 represents the hydel governor and turbine used in hydel
H1 model.TGH and TWH are the time constants of hydel governor and turbine
respectively. Here, the output Tm of hydel GT model is given as input to the

34
Heffron-Phillips generator model, as in Figure 3.3. RP represent the steady
state speed droop. The transfer function for hydel governor and turbine are
shown in Figure 3.5.
Figure 3.5 Hydel governor and turbine (for H1 model)
Figure 3.6 IEEE Type 1 Excitation system model
For this model, the generator is equipped with IEEE Type 1
excitation system shown in Figure 3.6. This excitation model represents
rotating exciter configuration and it consists of exciter, amplifier and
Excitation system stabilizer(ESS).The ESS is used to increase the stable
region of operation of excitation system.KA and TA represent the gain and
time constant of the amplifier. KE and TE represent the gain and time constant
of the exciter. KF and TF represent the gain and time constant of ESS.
The state space equation of model (H1) is given by

35
H1 H1 H1 H1 H1m mx A x B u (3.3)
where m = Number of hydel generators, here m=1.
AH1,BH1 = State matrix & input matrix of hydel H1 model.
xH1 = State variable vector of hydel H1model.
Equation (3.4) and (3.5) indicate the state variables selected for this
model for open loop and closed loop analysis.
[xH1]OPEN = [ Eq’, EFD VR VE Xe, Tm]T
(3.4)
[xH1]CLOSED = [ Eq’, EFD VR VE Xe, Tm, P1 P2 UE]T
(3.5)
where = Incremental change in Rotor speed
= Incremental change in power angle
Eq’ = Incremental change in generator voltage
EFD = Incremental change in field voltage
VR = Incremental change in amplified voltage
VE = Incremental change in output of excitation system stabilizer
Xe = Incremental change in output of hydel governor
Tm = Incremental change in mechanical power input.
In Equation (3.5), P1 P2 UE represent the state variables
involved in the closed loop PSDC model, also presented in Figure 3.4.
3.4.1.2 Hydel system H2 model
Figure 3.7 represents the hydel governor and turbine model
connected to the Heffron generator model. In this H2 model, the transient
droop compensation block is added between hydel governor and turbine

36
block. This block with a long resetting time is added to have stable control
performance of the system. The resetting time constant (TR) is typically 5
seconds (Prabha Kundur 2008).RT represents the transient state speed
droop. Xe’ represents the incremental change in output of Transient droop
compensation block.
The hydel generator in this model is equipped with IEEE ST1A
type excitation system. Figure 3.8 represents the IEEE ST1A type excitation
system model.
Figure 3.7 Hydel governor and turbine (for H2 model)
This model represents the static potential source controlled rectifier
excitation system. By considering KE=1 and TE=0 in the exciter block of
IEEE Type 1 excitation system model, the IEEE ST1A model is developed.
The main advantages of this model compared to the Type 1 excitation system
are: Instantaneous response, inexpensive, easily maintainable and reduction of
state variables in the modeling.

37
Figure 3.8 IEEE ST1A type Excitation system model
Figure 3.9 represents the complete state space model of the hydel
power system with hydel generator, governor- turbine and PSDC. Pd in
Figure 3.9 indicate the load change disturbance given to the system for
simulation and analysis.
The state space equation of model (H2) is given by
H2 H2 H2 H2 H2m mx A x B u (3.6)
where m = Number of hydel generators, here m=1.
AH2 = State matrix of hydel system H2 model.
xH2 and BH2 = State variable vector and input matrix involved.
Equation (3.7) and (3.8) indicate the state variables selected for this
model.
[xH2]OPEN = [ Eq’, EFD VE Xe, Xe’, Tm]T
(3.7)
[xH2]CLOSED = [ Eq’, EFD VE Xe, Xe’, Tm, P1 P2 UE]T
(3.8)

38
Figure 3.9 Complete state space model of hydel generator with GT dynamics and PSDC
39
3.4.2 Modeling of Single Machine Steam Power System
In case of single machine steam power system modeling, a 192
MVA, 18 KV, 3600 rev/min steam generator equipped with steam governor
and turbine is taken as the test system. In this work, the following
configurations are modeled and analyzed.
1. Steam Model (S1)
2. Steam Model (S2)
In S1model, steam generator is equipped with steam governor,
reheat steam turbine and IEEE Type 1 excitation system.
In S2 model, steam generator is equipped with steam governor,
non- reheat steam turbine and IEEE ST1A excitation system.
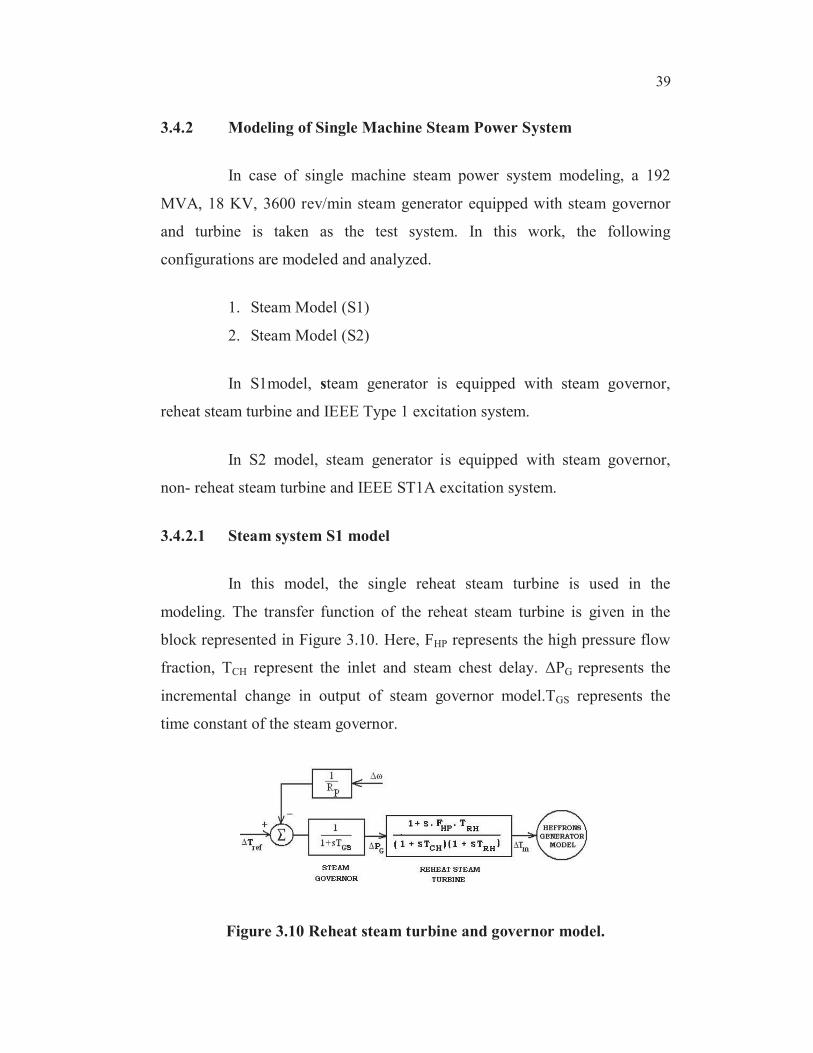
3.4.2.1 Steam system S1 model
In this model, the single reheat steam turbine is used in the
modeling. The transfer function of the reheat steam turbine is given in the
block represented in Figure 3.10. Here, FHP represents the high pressure flow
fraction, TCH represent the inlet and steam chest delay. PG represents the
incremental change in output of steam governor model.TGS represents the
time constant of the steam governor.
Figure 3.10 Reheat steam turbine and governor model.

40
The responses of the reheat turbines are significantly slower than
those that of non-reheat turbines. The main reason is that, the reheater time
constant will have more time delay compared to non-reheat type turbines. The
reheater time constant (TRH) used in this modeling is 6 seconds (IEEE
Standards 2005).This steam system S1 model is equipped with IEEE Type 1
Excitation system.
The state space equation of model (S1) is given by
S1 S1 S1 S1 S1n nx A x B u (3.9)
where n = Number of steam generators, here n=1.
AS1 = State matrix of steam system S1 model.
xS1 and BS1 = State variable vector and input matrix involved.
Equation (3.10) and (3.11) indicate the state variables selected for
this model.
[xS1]OPEN = [ Eq’, EFD VR VE PG Tm]T
(3.10)
[xS1]CLOSED = [ Eq’, EFD VR VE PG Tm, P1 P2 UE]T
(3.11)
3.4.2.2 Steam system S2 model
In this model, the single non-reheat steam turbine has been used in
the modeling. The transfer function of the non-reheat steam turbine is given in
the block given in Figure 3.11. By substituting, the time constant TRH =0 in
the reheat turbine transfer function (Figure 3.10), the transfer function for the
non-reheat turbine has been obtained. Here, the non-reheat time constant is
represented by TTS.

41
Figure 3.11 Non-Reheat Steam turbine and governor model
The state space equation of model (S2) is given by
S2 S2 S2 S2 S2n nx A x B u (3.12)
where n = Number of steam generators, here n=1.
AS2 = State matrix of this steam system model (S2).
XS2 and BS2 = State variable vector and input matrix involved.
Equation (3.13) and (3.14) indicate the state variables selected for
this model.
[xS2]OPEN = [ Eq’, EFD VE PG Tm]T
(3.13)
[xS2]CLOSED = [ Eq’, EFD VE PG Tm, P1 P2 UE]T
(3.14)

42
Table 3.1 Consolidated state variables and state order of hydel and steam
power systems
S.
NoSystem
State variables for various system models
H1
Model
H2
model
S1
model
S2
model
1 Generator , , , ,
2 Excitation
system
Eq’, EFD,
VR VE
Eq’, EFD,
VE
Eq’, EFD,
VR VE
Eq’, EFD,
VE
3 GT Xe, Tm Xe,
Xe’, Tm
PG,
Tm
PG,
Tm
4 PSDC P1 P2,
UE
P1 P2,
UE
P1 P2,
UE
P1 P2,
UE
5 Open loop
State order
8x8 8x8 8x8 7x7
6 Closed loop
State order
11x11 11x11 11x11 10x10
Table 3.1 represents the consolidated view of the various state
variables involved in generator, excitation system, Governor-Turbine and
damping controller of all the models involved in hydel and steam power
systems.
Figure 3.12 represents the complete state space model of the steam
generator equipped with governor-turbine model and PSDC. The state
matrices are developed for all the models involved in both hydel and steam
power systems. The state matrices are given in Appendix 1.

43
Figure 3.12 Complete state space model of steam generator with GT dynamics and PSDC

44
3.5 STATE SPACE MODELING OF MULTIMACHINE HYDEL
AND STEAM POWER SYSTEMS
In this work, three machine nine bus power system model
(Figure 3.2) is taken as the test system for modeling, simulation and analysis.
The single machine Heffron-Phillips generator model (Figure 3.3) is extended
to perform the modeling of multimachine system. Because of the interaction
among various generators in the multimachine system, the branches and loops
of the single machine generator model become multiplied.
For instance, the constant K1 in the single machine model becomes
K1ij,i=1,2…n; j=1,2….n in the multimachine modeling. In this work, n will be
equal to 3, representing the number of generators in the multimachine system
considered. Similarly all the K constants (K1 to K6), damping factor D,inertia
M and the state variables used in the single machine model are generalized for
n-machine notation. Figure 3.13 represents the state space model of
multimachine power system.
Figure 3.13 State space model of multimachine power system
45
For the linearized state space modeling of three machine nine bus
system, the same state space Equations (3.3, 3.6, 3.9 and 3.12) used for
various single machine hydel and steam configurations are implemented for
the multimachine system modeling.
3.6 SUMMARY
In this chapter, a detailed mathematical state space modeling of all
the configurations involved in both single machine and multimachine hydel
and steam power systems considering the effect of governor and turbine
dynamics has been presented. Also, the modeling of damping controller has
been presented. These various hydel and steam power system models form the
basis for all the simulation experiments carried out in this work.







![Mathematical Structures for CS [Chapter3]456](https://img.dokumen.tips/doc/110x75/55a26b121a28ab264a8b46a6/mathematical-structures-for-cs-chapter3456.jpg)