Embed Size (px)
Citation preview

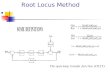
Chapter 7 Control Systems Design by Root-Locus Method
7.1 Introduction- The primary objective of this chapter is to present procedures
for the design and compensation of single-input-single-output linear time-invariant control systems.
- Compensation is the modification of the system dynamics to satisfy the given specifications.
Performance Specifications
- Transient response requirements such as the maximum overshoot and settling time in step response.
- Steady-state requirements such as steady-state error in following ramp input.

- The adjustment of the gain: increasing the gain value will improve the steady-state behavior but will result in poor stability or even instability.
- Compensation: to redesign the system by modifying the structure or by incorporating additional devices or components to alter the overall behavior so that the system.

- Compensator: A device inserted into the system for the purpose of satisfying the specifications.
Figure 7-1 (a) Series compensation; (b) parallel or feedback compensation.



Figure 7-2 (a) Root-locus plot of a single-pole system; (b) root-locus plot of a two-pole system; (c) root-locus plot of a three-pole system.

Figure 7-3 (a) Root-locus plot of a three-pole system; (b), (c), and (d) root-locus plots showing effects of addition of a zero to the three-pole system.

Figure 7-4 Electronic circuit that is a lead network if R1 C1 > R2 C2 and a lag network if R1 C1 < R2 C2 .


Figure 7-5 Pole-zero configurations: (a) lead network; (b) lag network.

- Specification: damping ratio and undamped natural frequency of the desired dominant closed-loop poles, maximum overshoot, rise time, and settling time.
- Problem: unstable for all val- ues of gain or is stable but has undesirable transient-response characteristics.


- If a large static error constant is required, cascade a lag network or alter the lead compensator to a lag-lead compensator.









- If we choose R2C2 > RIC1 in the circuit shown in Figure 7-4, it becomes a lag compensator.







Figure 7-14 Compensated system.
Figure 6-50 (a) Root-locus plots of the compensated system and uncompensated system; (b) root-locus plot of compensated system near the origin.






Figure 7-16 Unit-ramp responses of compensated and uncompensated systems. [The compensator is given by Equation (6–20).]


Figure 7-17 Unit-step responses of compensated and uncompensated systems. [The compensator is given by Equation (6–20).]


Figure 7-18 Lag–lead compensator.








Figure 7-21 (a) Root-locus plot of the compensated system; (b) root-locus plot near the origin.

Figure 7-22 Transient-response curves for the compensated system and uncompensated system. (a) Unit-step response curves; (b) unit-ramp response curves.





Figure 7-23 Determination of the desired pole-zero location.


Figure 7-24 (a) Unit-step response curves for the compensated and uncompensated systems; (b) unit-ramp response curves for both systems.