Embed Size (px)
Citation preview

140
CHAPTER 4 ENERGY AND DELAY AWARE MULTIPATH ROUTING
USING BAT ALGORITHM
4.1 INTRODUCTION
Most of the on-demand routing protocols of MANET uses the
shortest path method during the path establishment process for data
transmission and stick to the path till it break. The incessant usage of a single
path will deplete the battery power. The power failure of a mobile node not
only affects the node itself but also the overall network lifetime.The mobile
nodes in the MANET are typically powered by limited energy reservoir.
Reducing the number of hops will not be the aim of a routing algorithm,
instead the optimization of multiple parameters such as energy consumption,
delay, packet delivery ratio, bandwidth, routing overhead, multipath
establishment etc. Among these issues, decisive issue is constrained energy
which raises the need of energy efficient routing protocol for MANET. For
this reason, many research efforts have been devoted to developing energy
aware routing protocols.
The delay is the total latency experienced by a packet to traverse the
network from the source to the destination. At the network layer, the end-to-
end packet latency is the sum of processing delay, packetization delay,
transmission delay, queuing delay and propagation delay. The end-to-end
delay of a path is the summation of the node delay at each node, plus the link
delay at each link on the path. The end-to-end delay is an additive metric,
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

141 because it is the accumulation of all delays of the links along the path. To find
a QoS feasible path for a concave metric, the available resource on each link
should be atleast equal to the required value of the metric.
The high mobility of nodes in MANET causes frequent topological
changes in the network which may make routes invalid. This in turn leads to
the frequent route discovery process and high overhead. The multipath routing
addresses this problem by providing more than one route to a destination node.
Multipath routing appears to be a promising technique for ad hoc routing
protocols. The source and intermediate nodes can use these routes as primary
and backup routes. Alternatively, traffic can be distributed among multiple
routes to enhance transmission reliability, provide load balancing, and secure
data transmission. The multipath routing reduces the frequency of route
discovery effectively and therefore the latency for discovering another route is
reduced when currently used route is broken. Multiple paths can be useful in
improving the effective bandwidth of communication, responding to
congestion and heavy traffic, and in increasing delivery ratio. The
establishment of multiple paths between source and destination in a single
route discovery will drastically reduce the frequency of route establishment
process which in turn increases the overall network performance.
In addition, metaheuristic algorithms start to emerge as major
thespians for multi objective global optimization; they often mimic the best
characteristics in nature, especially biological systems. Many new algorithms
are emerging with many important applications [25, 29, 39]. Recently, a new
meta heuristic search algorithm, called BAT algorithm (BA), has been
developed by Xin-She Yang [56]. Initial studies reveal that the Bat algorithm
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

142 is very potential and could outperform existing algorithms. This optimization
algorithm is applied with the traditional AODV routing protocol for finding
effective energy and delay aware routing in MANET.
In this chapter, a novel Energy and Delay aware Dynamic Multipath
Routing Algorithm using BAT algorithm (BAT-EDMR) is proposed. This
algorithm modifies and extends AODV to establish dynamic multiple energy
and delay aware node-disjoint routing paths with the usage of BAT
optimization technique that provides better packet delivery ratio, minimum
end-to-end delay and reduced energy consumption and ensures load balancing
and improved network throughput.
The remainder of this chapter is organized as follows: Section 4.2
describes the characteristics of the Bat optimization algorithm. In Section 4.3,
the mechanism of the proposed novel Energy and Delay Aware Dynamic
Multipath Routing using BAT Algorithm (BAT-EDMR) is discussed in detail.
In Section 4.4, the performance of the algorithm BAT-EDMR is analyzed and
compared with the existing unipath routing protocol AODV and with the
existing multipath protocol ENDMR. The results are summarised in Section
4.5.
4.2 BAT ALGORITHM – AN OVERVIEW
BAT algorithm is a recently developed metaheuristic algorithm by
Xin-She Yang that adopts the behaviour of the natural bats for solving
optimization problems [56, 57].
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

143 4.2.1 Echolocation of Microbats
Bats are fascinating animals. They are the only mammals with
wings and they also have advanced capability of echolocation. It is estimated
that there are about 1000 different species which account for up to about one
fifth of all mammal species [2]. Their size ranges from the tiny bumblebee bat
(of about 1.5 to 2 g) to the giant bats with wingspan of about 2 m and weight
up to about 1 kg. Microbats typically have forearm length of about 2.2 to 11
cm. Most bats uses echolocation to a certain degree; among all the species,
microbats are a famous example as microbats use echolocation extensively
while megabats do not.
Most microbats are insectivores. Microbats use a type of sonar,
called, echolocation, to detect prey, avoid obstacles, and locate their roosting
crevices in the dark. These bats emit a very loud sound pulse and listen for the
echo that bounces back from the surrounding objects. Their pulses vary in
properties and can be correlated with their hunting strategies, depending on the
species.
Most bats use short, frequency-modulated signals to sweep through
about an octave, while others more often use constant-frequency signals for
echolocation. Their signal bandwidth varies depends on the species, and often
increased by using more harmonics.
Though each pulse only lasts a few thousandths of a second (up to
about 8 to 10 ms); however, it has a constant frequency which is usually in the
region of 25 kHz to 150 kHz. The typical range of frequencies for most bat
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

144 species are in the region between 25 kHz and 100 kHz, though some species
can emit higher frequencies up to 150 kHz. Each ultrasonic burst may last
typically 5 to 20 ms, and microbats emit about 10 to 20 such sound bursts
every second. When hunting for prey, the rate of pulse emission can be sped
up to about 200 pulses per second when they fly near their prey. Such short
sound bursts imply the fantastic ability of the signal processing power of bats.
In fact, studies show the integration time of the bat ear is typically about 300
to 400 μs.
As the speed of sound in air is typically v = 340 m/s, the
wavelength λ of the ultrasonic sound bursts with a constant frequency f is
given by λ = v/f, which is in the range of 2 mm to 14 mm for the typical
frequency range from 25 kHz to 150 kHz. Such wavelengths are in the same
order of their prey sizes.
Amazingly, the emitted pulse could be as loud as 110 dB, and,
fortunately, they are in the ultrasonic region. The loudness also varies from the
loudest when searching for prey and to a quieter base when homing towards
the prey. The travelling range of such short pulses is typically a few meters,
depending on the actual frequencies. Microbats can manage to avoid obstacles
as small as thin human hairs.
Studies show that microbats use the time delay from the emission
and detection of the echo, the time difference between their two ears, and the
loudness variations of the echoes to build up three dimensional scenario of the
surrounding. They can detect the distance and orientation of the target, the
type of prey, and even the moving speed of the prey such as small insects.
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

145 Indeed, studies suggested that bats seem to be able to discriminate targets by
the variations of the Doppler Effect induced by the wing-flutter rates of the
target insects [2].
Obviously, some bats have good eyesight, and most bats also have
very sensitive smell sense. In reality, they will use all the senses as a
combination to maximize the efficient detection of prey and smooth
navigation. Here, the echolocation and the associated behavior are considered.
Such echolocation behavior of microbats can be formulated in such
a way that it can be associated with the objective function to be optimized, and
this makes it possible to formulate new optimization algorithms. The basic
formulation of the Bat Algorithm (BA) followed by the implementation details
are outlined in the forth coming sections.
4.2.2 Bat Algorithm
If some of the echolocation characteristics of microbats are
idealized, various bat inspired algorithms or bat algorithms can be developed. Some of the approximate or idealized rules: 1. All bats use echolocation to sense distance, and they also `know' the
difference between food/prey and background barriers in some magical way; 2. Bats fly randomly with velocity vi at position xi with a fixed frequency fmin,
varying wavelength λ and loudness A0 to search for prey. They can
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

146 automatically adjust the wavelength (or frequency) of their emitted pulses and
adjust the rate of pulse emission r in the range of [0, 1], depending on the
proximity of their target; 3. Although the loudness can vary in many ways, it is assumed that the
loudness varies from a large (positive) A0 to a minimum constant value Amin.
Another obvious simplification is that no ray tracing is used in
estimating the time delay and three dimensional topography.
In addition to these simplified assumptions, the following
approximations are used for simplicity. In general the frequency f in a range
[fmin, fmax] corresponds to a range of wavelengths [λmin, λmax]. For example a
frequency range of [20 kHz, 500 kHz] corresponds to a range of wavelengths
from 0.7 mm to 17 mm. The ranges can be chosen freely to suit different
applications. The pseudo code of Bat Algorithm (BA) is as follows.
1. define objective function
2. initialize the population of the bats
3. define and initialize parameters
4. while(Termination criterion not met)
{
generate the new solutions randomly
if (Pulse rate (rand) >current)
select a solution among the best solution
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

147
generate the local solution around the selected
best ones.
end if
generate a new solution by flying randomly
if (Pulse rate (rand) >current)
select a solution among the best solution
generate the local solution around the selected best ones
end if
generate a new solution by flying randomly
if ( loudness & pulse frequency (rand) < current )
accept the new solutions
increase pulse rate and reduce
loudness end if
rank the bats and find the current best
} 5. Results and visualization 4.2.3 Bat Motion
For the bats in simulations, the rules have to be defined about their
positions xi and velocities vi in a d-dimensional search space are updated. The new solutions xt
i and velocities vti at time step t are given by
, (1)
(2)
(3)
where [ ] is a random vector drawn from a uniform distribution. Here x*
is the current global best location (solution) which is located after comparing
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

148 all the solutions among all the n bats at each iteration t. As the product f
i is
i
the velocity increment, f i
(or can be used to adjust the velocity change while
i)
fixing the other factor (or f ), depending on the type of the problem of
i i
interest. The values and can be taken as initial
assumptions, depending on the domain size of the problem of interest.
Initially, each bat is randomly assigned a frequency which is drawn uniformly from [ , ].
For the local search part, once a solution is selected among the
current best solutions, a new solution for each bat is generated locally using
random walk
(4) where is a random number vector drawn from [−1, 1], while ⟨ ⟩is the average loudness of all the bats at this time step.
The update of the velocities and positions of bats have some
similarity to the procedure in the standard particle swarm optimization, as fi
essentially controls the pace and range of the movement of the swarming
particles. To a degree, BA can be considered as a balanced combination of the
standard particle swarm optimization and the intensive local search controlled
by the loudness and pulse rate.
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

149 4.2.4 Loudness and Pulse Emission
Furthermore, the loudness Ai and the rate ri of pulse emission have
to be updated accordingly as the iterations proceed. As the loudness usually
decreases once a bat has found its prey, while the rate of pulse emission
increases, the loudness can be chosen as any value of convenience. For
example, the values A0 = 100 and Amin = 1 can be used. For simplicity, the
values A0 = 1 and Amin = 0 can also be used, with the assumption that Amin = 0 means that a bat has just found the prey and temporarily stop
emitting any sound. Now we have
[ ] (5) where and are constants. In fact, is similar to the cooling factor of a
cooling schedule in the simulated annealing. For any 0 < < 1 and > 0,
Now
(6)
In the simplest case, it can be used as = , and also = = 0.9 in the
simulations.
Preliminary studies by [57] suggested that bat algorithm is very
promising for solving nonlinear global optimization problems. Here it is used
for establishing effective routing for MANET.
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

150 4.3 BAT INSPIRED ENERGY AND DELAY AWARE
DYNAMIC ROUTING ALGORITHM (BAT-EDMR)
The new proposed algorithm BAT-EDMR is an Energy and Delay
Aware Dynamic Multipath Routing scheme that uses the behavior of the real
Bats to find dynamic multiple optimal paths between source and destination
nodes.
4.3.1 Route Discovery Phase
The steps involved in the new BAT-EDMR algorithm to establish
paths on-request using a reliable reverse path establishment method as follows.
1. Whenever the source node S wants to send data to the destination node
D, it floods the RREQ bats in the network. The bats which are small
control packets carrying the D-id, travel in all available paths to D, and
use their behaviours echolocation and loudness to collect details about
the path they travel to reach the D.
a) Echolocation behaviour calculates the time delay taken by the
bats to reach the destination.
b) Loudness behaviour measures the total energy level of all the
nodes in the path it travelled to reach D.
2. Upon receiving the RREQ Bats, the destination D inturn rebroadcasts
the Reverse RREQ Bats in all available paths to source S.
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

151 3. The Reverse RREQ (R-RREQ) Bats while travelling from D to S,
collect the time delay taken by each node to reach the source and the
total average residual energy of all nodes in the path they travelled. 4. In the BAT-EDMR, the intermediate node stores the incoming R-
RREQ bats during a particular time interval along with their energy and
delay taken to reach this node. The R-RREQ bat which has the
maximum energy level and minimum time delay is selected and
forwarded to the neighbours.
5. In order to reduce the number of R-RREQ bats flooding and to select
the best next hop node among the existing next hop nodes, the bat uses
its loudness and echo property. A hello packet which carries the D-id
will be sent to all the next neighbouring nodes for checking the
availability of paths to the destination D through them. The R-RREQ
bats will be forwarded to the neighbouring nodes that have paths to D
and responded for the hello messages within the stipulated time period.
6. Upon receiving multiple Reverse RREQ Bats from D, the source filters
only the node disjoint paths represented by the bats and discards the
other paths. 7. The selected paths(N) are ranked based on the higher residual energy
and minimum delay values.
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

152
8. The number of required paths which also satisfies the QoS
requirements of the application are selected as the best paths in the list
and data transmission is distributed among them. 4.3.2 Route Updation Process
As the loudness Ai (Energy level) of each bat usually decreases
when a bat(path) is involved in data transmission, it has to be updated as the
data transmission proceeds. In order to maintain an updated path list, the
source node floods RREQ Bats at regular intervals through the selected paths (N) to collect the current Energy level and time delay. Then the paths are again
ranked with the new collected values and the number of required best paths are
selected for data transmission.
4.3.3 Route Maintenance
In BAT-EDMR algorithm, the routes are maintained as follows: If a
node along a path moves or a route fails due to irregular circumstances, a link
failure message will be sent to the source through the intermediate nodes to
inform the erasure of the route. Upon receiving the link failure message, the
source node removes the broken route from the existing path list and redirects
the data packets in the remaining available paths in the path list. Thus the
overhead is drastically reduced due to the avoidance of frequent route
discoveries and uninterrupted data transmission.
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

153 4.4 PERFORMANCE EVALUATION 4.4.1 Analysis of Performance between AODV and BAT-
EDMR
The Network simulator (NS-2) is used to evaluate the performance
of the proposed algorithm [63]. In the simulation, the Distributed Coordination
Function (DCF) of IEEE 802.11 for wireless LANs is used as the MAC layer
protocol. It has the functionality to notify the network layer about link
breakage.
The simulation is carried out for 50 mobile nodes which move in a
1000 meter x 1000 meter rectangular region for 300 seconds simulation time.
It is assumed that each node in the network moves independently with the
same average speed. All nodes have the same transmission range of 250
meters. The simulated traffic is Constant Bit Rate (CBR).
The random waypoint model is used to simulate nodes movement.
The motion is characterized by two factors: the maximum speed and the pause
time. The pause time is defined as the period of time a node stays stationary
before heading for a new random location. Each node starts moving from its
initial position to a random target position selected inside the simulation area.
The node speed is uniformly distributed between zero and the maximum
speed. Table 4.1 lists the simulation parameters and environments used.
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

154
Table 4.1 Simulation Scenario
Simulation Terrain Dimension 1000 X 1000 meters
Transmission Range 250 m
Mobility model Random way point
Number of Nodes 50
Node Speed 0-30 m/s
Routing protocols AODV, BAT-EDMR
Traffic Source Model Constant Bit Rate
Channel Data Rate 2 Mbps
Initial energy 20 Joules
Performance Metrics
The following metrics are used to evaluate the performance of
BAT-EDMR: Packet Delivery Ratio: It represents the ratio of the number of data packets
delivered to the destination and the number of data packets sent by the source. End-to-End delay: It depicts the delay experienced by packets from source to
destination. This delay also includes processing and queuing delays in each
intermediate node. Remaining Energy: It is measured as the total amount (in Joules) of remaining
battery energy of the nodes at the end of the simulation period.
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

155 Normalized Routing Load: It can be measured by the number of routing
control packets transmitted per data packet delivered at the destination. Throughput: Throughput or network throughput is the average rate of
successful message delivery over a communication channel. This data may be
delivered over a physical or logical link, or pass through a certain network
node. The throughput is usually measured in bits per second (bit/s or bps), and
sometimes in data packets per second or data packets per time slot.
The system throughput or aggregate throughput is the sum of the
data rates that are delivered to all terminals in a network. Network Life Time: The lifetime of a network is defined as the duration of
time until the first node failure due to battery depletion. 4.4.1.1 Packet Delivery Ratio (a) Varying Number of Nodes
Table 4.2 shows the effect of Number of Nodes over Packet
Delivery Ratio of two protocols. BAT-EDMR shows a margin of 11.6 % to
22% improvement in Packet Delivery Ratio than AODV.
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

156
Table 4.2 Effect of Number of Nodes on Packet Delivery Ratio
Number of Packet Delivery Ratio (%)
Nodes
AODV BAT-EDMR
5 88.2 99.81
10 87.6 99.4
15 84.4 99.2
20 83.6 98.89
25 81 98.71
30 79.2 98.58
35 76.4 96.04
40 72.1 94.54
45 71.4 91.2
50 67.5 89.3
(b) Varying Velocity
Figure 4.1 portrays the performance of the proposed protocol BAT-
EDMR in terms of Packet Delivery Ratio over Velocity. The Packet Delivery
Ratio of BAT-EDMR is higher with a hike of 10% to 23% when compared to
the traditional AODV.
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

157
PACKET DELIVERY RATIO 100
(%)
90
RATI
O
80
70
DEL
IVER
Y
60
50
PACK
ET
40
30
20
0 5 10 15 20 25 30
MAXIMUM VELOCITY (m/s)
AODV
BAT-EDMR
Figure 4.1 Effect of Velocity on Packet Delivery Ratio 4.4.1.2 End-To-End Delay (a) Varying Number of Nodes
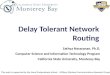
Figure 4.2 divulges the effect of Varying Number of Nodes over
End-to-End Delay of two protocols. The proposed algorithm BAT-EDMR
shows very minimum delay (up to 60%) when compared to that of AODV.
END TO END DELAY 600
(ms)
500
400
DEL
AY
300
AVER
AGE
200
100
0
5 10 15 20 25 30 35 40 45 50
NUMBER OF NODES
AODV BAT-EDMR
Figure 4.2 Effect of Number of Nodes over End-to-End Delay
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

158 (b) Varying Node Velocity
The effect of Varying Node Velocity over End-to-End Delay of
AODV and BAT-EDMR is shown in the figure 4.3 which proves that the
proposed algorithm BAT-EDMR shows minimum delay when compared to
that of AODV with a marginal decrease of 58% to 74%.
END-TO -END DELAY 600
(ms)
500
DEL
AY 400
300
AVER
AGE
200
100
0
0 5 10 15 20 25 30
MAXIMUM VELOCITY (m/s)
AODV
BAT-EDMR
Figure 4.3 Effect of Node Velocity on End-to-End Delay 4.4.1.3 Average Remaining Energy
Figure 4.4 expounds the effect of number of nodes on average
remaining energy of nodes under two protocols. The remaining energy of the
nodes at the end of simulation is much higher for BAT-EDMR than AODV. In
BAT-EDMR, the reduction in energy consumption is about 44% to 66% than
the traditional AODV. This is because the nodes which have higher energy are
taken for data transmission.
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

159
REMAINING ENERGY
(J) 14
ENER
GY 12
10
REM
AIN
NG 8
6
4
AVER
AGE
2
0
5 10 15 20 25 30 35 40 45 50
NUMBER OF NODES
AODV
BAT-EDMR
Figure 4.4 Effect of Number of Nodes on Average Remaining Energy 4.4.1.4 Normalized Routing Load
Figure 4.5 shows the effect of node velocity on normalized routing
load under two protocols. The normalized routing load is much higher for
AODV because of the frequent re-route discoveries. In BAT-EDMR, the
energy and delay aware multipath routing mechanism avoids the frequent re-
route discoveries thus in turn reduces normalized routing load from 44% to
68% when compared to the traditional AODV.
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

160
NORMALIZED ROUTING LOAD
LOAD
8
7
6
ROU
TING
5
4
NO
RMA
LIZE
D
3
2
1
0
0 5 10 15 20 25 30
MAXIMUM VELOCITY (m/s)
AODV BAT-
EDMR
Figure 4.5 Effect of Node Velocity on Normalized Routing Load 4.4.1.5 Throughput
The throughput over the varying number of nodes for the two protocols AODV and BAT-EDMR is depicted in the figure 4.6.
THROUGHPUT
4600
(bits
/sec
) 4400
4200
4000
THRO
UGHP
UT
3800
3600
3400
3200
5 10 15 20 25 30 35 40 45 50
NUMBER OF NODES
AODV
BAT-EDMR
Figure 4.6 Effect of Number of Nodes on Throughput
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

161
The multipath mechanism with energy and delay considerations provides the better throughput for BAT-EDMR up to 17.33 % over the protocol AODV. 4.4.2 Performance Analysis between BAT-EDMR and ENDMR
The evaluation of the performance between the protocols BAT-
EDMR and ENDMR is carried out using the simulation environment and
assumptions made in [6].
4.4.2.1 Total Residual Energy
Figure 4.7shows that the total residual energy of nodes in BAT-
EDMR is high with the marginal of 38% when compared to the protocol
ENDMR. Since BAT-EDMR selects nodes with higher residual energy and
minimum delay at each and every step of the routing process, the total residual
energy is high.
TOTAL RESIDUAL ENERGY Vs. TIME 4500
4000
(J) 3500
ENER
GY
3000
2500
RESI
DU
AL 2000
1500
1000
500
0
0 10 20 30 40 50 60 70 80 90 100
TIME(SEC)
ENDMR
BAT-EDMR
Figure 4.7 Effect of Simulation time on Residual Energy
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)

162 4.4.2.2 Network Life Time
From the figure 4.8, it is found that the network life time is increased in BAT-EDMR than ENDMR.
SIMULATION TIME Vs. NUMBER OF DEAD NODES 8
EXPI
RED
7
6
NO
DE 5
4
OF
3
NUM
BER
2
1
0
0 10 20 30 40 50 60 70 80 90 100
TIME (SEC)
ENDMR
BAT-EDMR
Figure 4.8 Effect of Simulation time on No. of nodes expired 4.5 SUMMARY
The Energy and Delay aware multipath on-demand routing
algorithm using BAT optimization (BAT-EDMR) proposed in this chapter
improves the QoS parameters delay and energy. The proposed algorithm
selects the paths with the minimum delay and the maximum residual energy at
nodes. The BAT-EDMR produces better results than the existing AODV in
terms of packet delivery ratio, end-to-end delay, and residual energy at nodes
and normalized routing load. The performance of BAT-EDMR is also
compared with the existing multipath protocol ENDMR and it is observed that
BAT-EDMR outperforms ENDMR.
Print to PDF without this message by purchasing novaPDF (http://www.novapdf.com/)