Embed Size (px)
Citation preview

4
Chapter 2
Element Free Galerkin (EFG) method
2.1 Introduction
The element free Galerkin (EFG) method is a meshless method developed by Belytschko,
Lu and Gu (1994). This method only requires a set of nodes and a description of the
boundaries to construct an approximation solution. The connectivity between the data points
and the shape functions are constructed by the method without recourse to elements.
The EFG method employs the moving least square (MLS) approximations, which are
composed of three components: a weight function of compact support associated with each
node, a polynomial basis and a set of coefficients that depend on position. The support of the
weight function defines a node the domain of influence, which is the sub-domain over which
a particular node contributes to the approximation. The overlap of the nodal influence domain
defines the nodal connectivity.
One useful property of MLS approximations is that their continuity is equal to the
continuity of the weight function; highly continuous approximations can be generated by an
appropriate choice of the weight function. Although the EFG can be considered meshless with
respect to shape function construction or function approximation, a mesh will be required for
solving partial differential equations by the Galerkin approximation procedure. This is
because evaluation of the integrals in the weak form requires a subdivision of the domain
unless nodal quadrature is used.

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 5
This chapter describes the construction of MLS approximations and the resulting EFG
shape functions in two types of support domains either circle or rectangle. In my work, the
second-derivatives of the shape function are required for equilibrium model in Chapter 3. So,
there are two cases to compute the second-order derivatives of the shape functions also
presented here. The first case is referred in the PhD thesis of Duflot (2004), Duflot (2005) and
Duflot and Nguyen-Dang (2001), (2004). And the other is in Belytschko, Lu and Gu (1994),
Dolbow and Belytschko (1998) and Liu (2003). In the course of this description, the effect of
different weight functions is illustrated.
Finally, the choice of the basic functions, the support and influence domain concepts are
defined on that. The determination of the dimension of a support domain and the detail
algorithm to compute the shape function and their derivatives are also presents in this chapter
as follows.
2.2 Moving least square (MLS) approximation
In this section, I would like to present the MLS approximation, which was introduced by
Lancaster and Salkauskas (1981) for smoothing and interpolating data. Currently the MLS
method is a widely used alternative for constructing meshless shape functions for
approximation. The first, Nayroles et al (1992) were used MLS approximation to construct
shape functions for their diffuse element method (DEM), after Belytschko, Lu and Gu (1994),
who named it the EFG method, where the MLS approximation is also employed.
This method employs MLS approximants to approximate the function with as
in Liu (2003), Fries and Matthies (2004), and Belytschko, Lu and Gu (1994). We consider a
sub-domain , the neighbourhood of a point
)(xu )(xu h
xΩ x and denoted as the domain of definition of
the MLS approximation for the trial function x , which is located in the problem domain Ω .
Let be the function of the field variable defined in the domain )(xu xΩ . The approximation of
at point )(xu x is denoted . The MLS approximation first writes the field function in
the form
)(xu h
(2.1) ∑ Τ==m
iii
h apu )()()()()( xaxpxxx
where is the number of terms of monomials, is a vector of basis functions that
consists most often of monomials of the lowest orders to ensure minimum completeness.
m )(xp

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 6
The coefficient are also functions of )(xia x , in the equation (2.1) is obtained at
any point
)(xia
x by performing a weighted least square fit for the local approximation, which is
obtained by minimizing the difference between the local approximation and the function. The
discrete norm as follows: 2L
∑=
−−=n
II
hI xuuxxwJ
1
2))()()(( x
(2.2) 2
1])()([)( II
n
II uxxxw −−= Τ
=∑ xap
where is a weight function with compact support and n is the number of points in
the neighbourhood of
)( Ixxw −
x , for which the weight function xΩ 0)( ≠− Ixxw , and is the
nodal value of at .
Iu
u Ixx =
iu
ix
)( ih xu
)(xu hu
x 0
• ••
••
•
Figure 2.1: The approximation function and the nodal parameters in the MLS approximation )(xu hiu
Equation (2.2) can be rewritten in the form
(2.3) ))(()( uPaxWuPa −−= ΤJ
there
(2.4) ),,,( 21 nuuu K=Τu
(2.5)
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
)()()(
)()()()()()(
21
22221
11211
nmnn
m
m
xpxpxp
xpxpxpxpxpxp
L
MOMM
L
L
P

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 7
and
(2.6)
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
−−
=
)(00
0)(000)(
)( 2
1
nxxw
xxwxxw
L
MOM
L
L
xW
The functional can be minimized by setting the derivative of with respect to equal
to zero i.e.,
J J a
0=∂∂
aJ . The following system of equation results: m
0])()()[(2)(0
0])()()[(2)(0
0])()()[(2)(0
1
12
2
11
1
∑
∑
∑
=
Τ
=
Τ
=
Τ
=−−⇔=∂∂
=−−⇔=∂∂
=−−⇔=∂∂
n
IIIImI
m
n
IIIII
n
IIIII
uxxxpxxwaJ
uxxxpxxwaJ
uxxxpxxwaJ
ap
ap
ap
MMM
(2.7)
This is in vector notation
∑ (2.8) =
Τ =−−n
IIIII uxxxxxw
10])()()[(2)( app
(2.9) 0)()()()()()(21
=−−−∑=
ΤIIII
n
III uxxxwxxxxxw papp
Eliminating the constant factor and separating the right hand side given
(2.10) ∑∑==
Τ −=−n
IIIII
n
III uxxxwxxxxxw
11)()()()()()( papp
or
(2.11) PuxWxaPPxW )()()( =Τ
So, we have
(2.12) uxBxAxa )()()( 1−=
with (2.13a) ∑=
ΤΤ −==n
IIII xxxxw
1)()()()()( ppPPxWxA
is often called moment matrix, and
])()()()()()([)()( 2211 nn xxxwxxxwxxxw pppPxWxB −−−== L (2.13b)

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 8
Finally, we substitute the equations (2.12), (2.13a) and (2.13b) into (2.1) and obtaining an
approximation of the form
(2.14) uxBxApx )()()()( 1−Τ= xu h
or more detail
(2.15) I
n
III
n
IIII
h uxxxwxxxxwxu ∑∑=
−
=
ΤΤ −⎥⎦
⎤⎢⎣
⎡−=
1
1
1)()()()()()()( ppppx
This can be written shortly as
(2.16) uxxx )()()(1
Τ
=
Φ== ∑n
III
h uu φ
where the shape function is defined by )(xΦ
(2.17) )()]()[()( 1 xBxAxpx −ΤΤ =Φ
and thus for one certain shape function Iφ at a point x
(2.18) )()()]()[()( 1III xxxw pxAxpx −= −Τφ
or (2.19) )()()()( xpxcx III wxΤ=φ
with (2.20) )()()( 1 xpxAxc −=
To compute the shape functions from (2.17) it is necessary to invert the A matrix. In one
dimension, this operation is not computationally expensive, but here we need to compute in
two or three dimensions it becomes burdensome. In this section, we present two cases to
compute the shape functions and their derivatives as following.
Case one: According to the PhD thesis of Duflot (2004), Duflot (2005), and Duflot
and Nguyen-Dang (2001), (2004). We have the first-order derivatives of the MLS shape
functions
(2.21) )()()()()()()( ,,, xpxcxpxcx kIIIIkkI wxwx ΤΤ +=φ
with
)()()()()()( ,1
,1
, xpxAxpxAxc kkk−− +=
)()()()()()( ,11
,1 xpxAxpxAxAxA kk
−−− +−=

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 9
)]()()()[( ,,1 xpxcxAxA kk +−= −
(2.22) ])[(1kbxA −=
and
(2.23) ∑=
Τ=n
IIIkIk xxw
1,, )()()()( ppxxA
The second-order derivatives are
++= ΤΤ )()()()()()()( ,,,, xpcxpxcx lIIkIIklklI wxxwxφ
(2.24) )()()()()()( ,,, xpxcxpxc klIIkIIl wxwx ΤΤ ++
with
)]()()()()()()()[()( ,,,,,,1
, xcxAxcxAxcxAxpxAxc klkllkklkl −−−= −
(2.25) ])[(1klbxA −=
and
(2.26) ∑=
Τ=n
IIIklIkl xxw
1,, )()()()( ppxxA
Case two: According to Belytschko, Lu and Gu (1994), Dolbow and Belytschko
(1998) and Liu (2003). This method involves the LU decomposition of the A matrix. The
shape function in (2.17) can be written as
(2.27) )()()()]()[()( 1 xBxxBxAxpx Τ−ΤΤ ==Φ γ
which leads to the relationship
)()()( xpxxA =γ (2.28)
the vector )(xγ can be determined using an LU decomposition of the A matrix and followed
by back substitution. The derivatives of )(xγ can be compute similarly, which leads to a
computationally efficient procedure for computing the derivatives of . We have )(xhu
γγ kkk ,,, ApA −= (2.29)
CHAPTER 2: ELEMENT FREE GALERKIN METHOD 10
)( ,,,,,,, γγγγ klkllkklkl AAApA ++−= (2.30)
This leads to a simple relationship for the first derivatives of the shape function in (2.27)
given by
kkk ,,, BB γγ +=Φ (2.31)
and second-derivative is
klkllkklkl ,,,,,,, BBBB γγγγ +++=Φ (2.32)
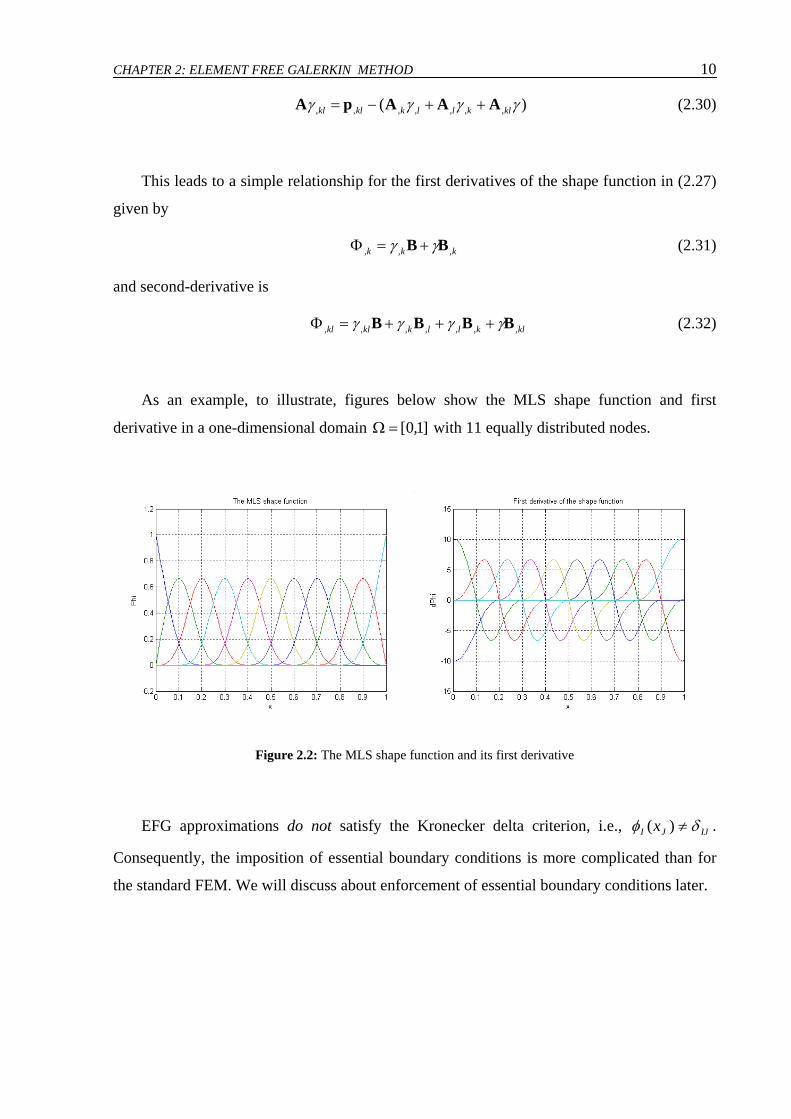
As an example, to illustrate, figures below show the MLS shape function and first
derivative in a one-dimensional domain ]1,0[=Ω with 11 equally distributed nodes.
Figure 2.2: The MLS shape function and its first derivative
EFG approximations do not satisfy the Kronecker delta criterion, i.e., IJJI x δφ ≠)( .
Consequently, the imposition of essential boundary conditions is more complicated than for
the standard FEM. We will discuss about enforcement of essential boundary conditions later.

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 11
2.3 . The basic functions In meshless methods, the shape functions depended on the basis functions, which play an
important role with respect to the accuracy of results in computational. So, in this thesis, we
approached the problems by both displacement and equilibrium models. Therein equilibrium
model needs the second-order derivatives of shape functions, so we need to choose the basis
function and also need the second order. Here, we discuss the use of the pure basic
polynomial in 1D and 2D according to the PhD thesis of Duflot (2004), Duflot (2005) as
follows.
1D 2D Constant ]1[ ]1[ Linear ],1[ x ],,1[ yx
Quadratic ],,1[ 2xx ],,,,,1[ 22 xyyxyx
Table 2.1: Basic polynomial in 1D and 2D
k,,AA and matrices and vector in the equation (2.1), (2.20) and (2.23) do not
depend on the evaluation point. So, if the size of the problem permits it, it is efficient to store
once for all these values at each node, together with the coordinates of the node and a pointer
to the weight function. Furthermore, we can benefit from the fact that the first basis function
is always the unit function and that the next basis functions are the coordinates if the basis is
at least linear. So, we can cleverly store only and find inside it the basis
and the coordinates . For example, for linear and quadratic functions, the dyadic products
of linear function are
kl,A )( Ixp
)()( II xx Τpp )( Ixp
Ix
(2.33) ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=Τ
2
2
1)()(
IIII
IIII
II
II
yyxyyxxx
yxxx pp
and quadratic function
(2.34)
⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
=Τ
22
34
3224
2322
2232
221
)()(
II
III
IIIII
IIIIII
IIIIIIII
IIIIII
II
yxyxySYMyxyxxyxyyxyyxyxxyxxyxyxyx
xx pp

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 12
2.4 Concept of the support domain
In the solid body of the structure, we use the sets of nodes scattered in the problem
domain and its boundary. The density of the nodes depends on the accuracy requirement of
the analysis and the resources available.
The nodal distribution is usually not uniform and a denser distribution of nodes is often
used in the area where the displacement gradient is larger. To interpolate the value at a point
within the problem domain, we used the concept of the support domain at that points, this
domain included the number of nodes in a “small local domain”. This small local domain is
often called the support domain. A support domain of a point x determines the number of
nodes to be used to support or approximate the function value at x . It can have different
shapes and its dimension and shape can be different for different points of interest x , as
shown in figure 2.3 below.
The shapes most often used are circular or rectangular. We always use the concept of
support domain to select the nodes for constructing shape functions. These choices relate to
determine the dimension of the support domain. We can see in Liu (2003), Fleming (1997)
and Krongauz (1996).
Figure 2.3: The rectangular and circle support domains

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 13
2.5 Concept of the influence domain
We should understand and distinguish clearly between support and influence domains in
meshless methods. According to Liu (2003), and the PhD thesis of Fleming (1997) the
influence domain is defined as a domain that a node exerts an influence upon. It goes with a
node, in contrast to the support domain, which goes with a point of interest x that can be, but
does not necessarily have to be, at the node.
Use of an influence domain is an alternative way to select nodes for interpolation, and it
works well for domains with highly non-regularly distributed nodes. The influence domain is
defined for each node in the problem domain, and it can be different from node to node
represent the area of influence of the node, as shown in figure 3.5 below. Node 1 has an
influence radius of , node 2 has and node 3 has , etc. 3r1r 2r
xQ *Ωο 1
r1 ο 3
r3
ο 2r2
Γt
uΓ
tΓ
Figure 2.4: Influence domain of nodes
The node will be involved in the shape function construction for any point that is within
its influence domain. As above figure, in constructing the shape functions for the point ,
nodes 1 and 2 will be used, but node 3 will not be used. The fact that the dimension of the
influence domain can be different from node to node allows some nodes to have further
influence than others and prevents unbalanced nodal distribution for constructing shape
functions. Also in above figure, nodes 1, 2 are included for constructing shape functions for
the point , but node 3 is not included, even though node 3 is closer to compared with
node 1.
Qx
Qx Qx

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 14
2.6 Determination of the dimension of a support domain
In meshless methods, currently there are many methods to determine the dimension of a
support domain in problems depending on each of type difference problems. In fact, none
of methods can be totally suitable to all types of nodal distributions. In this thesis, we present
some relative methods to determine the dimension of a support domain.
dm
The accuracy of interpolation depends on the nodes in the support domain of the point of
interest, which is often a quadrature point or the center of integration cells. Therefore, a
suitable support domain should be chosen to ensure a proper area of coverage for
interpolation.
cs ddm α= (2.35)
with is a characteristic length that relates to the nodal spacing near the point of interest. If
the nodes are uniformly distributed, is simply the distance between two neighbouring
nodes. In the opposite case non-uniformly distributed, can be defined as a value average
nodal spacing in the support domain by computational the minimum, the maximum nodal
spacing for a given node. And
cd
cd
cd
sα is a coefficient that according to computed experience,
generally, a 4.1=sα to lead to good results. We can see this problem clearly in Liu
(2003), Liu and Gu (2003).
0.4
Moreover, we can use the method fixed minimum number of supporting points in the
domain of interpolation. This method may be suitable to cases the domain of problem such as
crack, plasticity or complex problem domain and currently, this method is used almost.
In my opinion, there are some remarks for this determination: we note that the accuracy
of interpolation depends on the nodes in the support domain of the point of interest. The first
it ensures that there are enough particles inside the support. The second, it makes sure that
there should not have too many particles inside a support. Because, if there are not enough
particles inside the support, when we calculate meshless shape function, we will encounter
singularity problem. If it has too many particles in a support, the bandwidth of stiffness matrix
will be large, so computationally it is not efficient. The third, with respect to above average
computation, we should take care the difference between the minimum and maximum support
size is not too large.

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 15
2.7 The weight functions
The weight functions play an important role in meshless methods. The weight function
should be non-zero only over a small neighbourhood of , called the domain of influence of
node
IxthI . This domain of influence will be defined latter. The various weight functions that
greatly affect the accuracy of the numerical results need to satisfy the following conditions
− , inside a sub-domain 0)( >xwi , xΩ− , outside the sub-domain 0)( =xwi , xΩ− is a monotonically decreasing function )(xwi
To understand more clearly and detail about the above conditions we can be refer to Liu
G.R. (2003), Belytschko, Lu and Gu (1994) and Shuyao and De’an (2003).
According to the PhD thesis of Organ (1996), the choice of the weight function
affects the resulting approximate function . As the illustration, consider the
three cases be shown in figure 2.5, figure 2.6 and figure 2.7 where the function is
approximated by using the nodal values at eleven spaced nodes, and using together a
linear polynomial basis . In each case, a representative weight function
corresponding to node 6 is plotted along with the resulting MLS approximation for the entire
domain.
)(xu h)( Ixxw −
)(xu
)(xu h
],1[ x=Τp
If we use the weight function unsuitable, it won’t get well for approximate solution. As a
result, we can scan to the plots below. For example, we consider the domain scattered by 11
nodes. The constant and cubic spline weight functions and resulting MLS approximations,
together with FEM approximation also shows follows
In figure 2.5, we used the constant weight function and the solution of MLS
approximation is linear. So in this case, the result is not good because of error between exact
and approximate solution is too large. Let’s look at in figure 2.6, when we used the cubic
spline weight function, it had given a better result. Together the FEM approximation is given
good result as figure 2.7.

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 16
Figure 2.5: Constant weight function and corresponding approximation result
Figure 2.6: Cubic spline weight function and corresponding approximation result

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 17
Figure 2.7: FEM approximation result
For more details, the size of support of weight function associated with node
should be chosen such that should be large enough to have a sufficiently large number of
nodes to cover the domain of definition of the MLS approximation for the trial function at
every sample point to ensure the regularity of A. A very small may result in a relatively
large numerical error in using Gauss numerical quadrature to calculate the elements in the
system matrix.
iiwIdm
Idm
Idm
On the other hand, should be also small enough to maintain the local character for
the MLS approximation. As above mentioned, we can see that the weight function affects the
resulting approximation, if the weight function is continuous then the shape functions are also
continuous.
Idm
In this thesis, we used the weight functions according to the thesis PhD of Dufot (2004),
Duflot (2005), Duflot and Nguyen-Dang (2001), (2004), Dolbow and Belytschko (1998) and
Liu (2003) as follows
a. Cubic spline weight function
⎪⎩
⎪⎨
⎧
>≤<−+−
≤+−=
1|s|if01||if44
||if44)( 2
13342
34
2132
32
1 sssssss
sw (2.36)
CHAPTER 2: ELEMENT FREE GALERKIN METHOD 18
b. Quartic spline weight function
(2.37) ⎩⎨⎧
>≤−+−
=1|s|if01|s|if3861
)(432
2sss
sw
I
I
dmxx
s−
= is a radius of influence; and is a size of the domain of influence of the Idmwith
thI node. The size of the domain of influence at a node and is computed as section 2.6
above. Now, we consider two case of the support domain in two-dimension
Idm
error
Ω
xΩ.
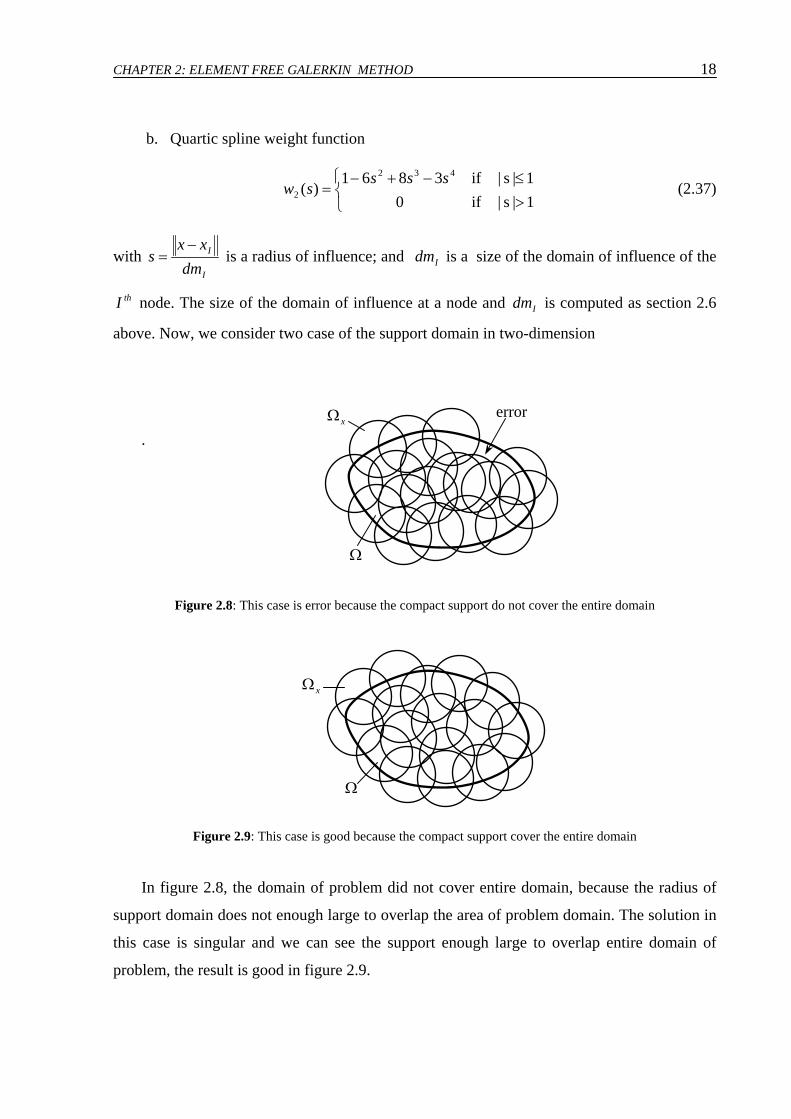
Figure 2.8: This case is error because the compact support do not cover the entire domain
xΩ
Ω
Figure 2.9: This case is good because the compact support cover the entire domain
In figure 2.8, the domain of problem did not cover entire domain, because the radius of
support domain does not enough large to overlap the area of problem domain. The solution in
this case is singular and we can see the support enough large to overlap entire domain of
problem, the result is good in figure 2.9.

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 19
Figure 2.10: Cubic spline weight functions and first derivative in one-dimension
In two-dimension, the weight function corresponding to circle domain
⎟⎟⎠
⎞⎜⎜⎝
⎛ −=
i
iai dm
xxww )(x (2.39)
and rectangular domain
⎟⎟⎠
⎞⎜⎜⎝
⎛ −⎟⎟⎠
⎞⎜⎜⎝
⎛ −= y
i
iax
i
iai dm
yywdm
xxww ||||)(x (2.40)
Referring to the equations of derivative of the shape functions, it can be seen that the
spatial derivative of the weight function is necessary to compute the spatial derivative of the
A and B matrices. For circle domains in two-dimension is i
idm
xxs −= , for example with the
quartic spline weight function )(2 sw
2,2, )(i
ikkkki sdm
xxww −=x (2.41)

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 20
2,242,2
,2,))((
)(i
klk
i
illikkkklkli sdm
wdms
xxxxs
www
δ+
−−⎟⎟⎠
⎞⎜⎜⎝
⎛−=x (2.42)
with
(2.43) ⎩⎨⎧
>≤−+−
=1|s|if01|s|if122412
)(32
,2sss
sw k
(2.44) ⎩⎨⎧
>≤−+−
=1|s|if01|s|if364812
)(2
,2ss
sw kl
i
klikli dm
xw δ12)(,−
=if we have ; ixx = 1)( =ixw 0)(, =iki xw and
Similarly, for rectangular domain we used the tensor product weights follows
yxyxi wwswswxxw .)().()( ==− (2.45)
where and is given by (2.36) and (2.37) with replaced by and
respectively
)( xsw )( ysw xs yss
x
ix dm
xxs
−= (2.46)
y
iy dm
yys
−= (2.47)
xIx cdm α= yIy cdm α=with ; (2.48)
Thus derivatives of the weight function in (2.45) is calculated by
yx
x wdx
dww ., = (2.49)
xy
y wdy
dww ., = (2.50)
yx
xx wdx
wdw .2
2
, = (2.51)
xy
yy wdy
wdw .2
2
, = (2.52)
CHAPTER 2: ELEMENT FREE GALERKIN METHOD 21
dydw
dxdww yx
xy ., = (2.53)
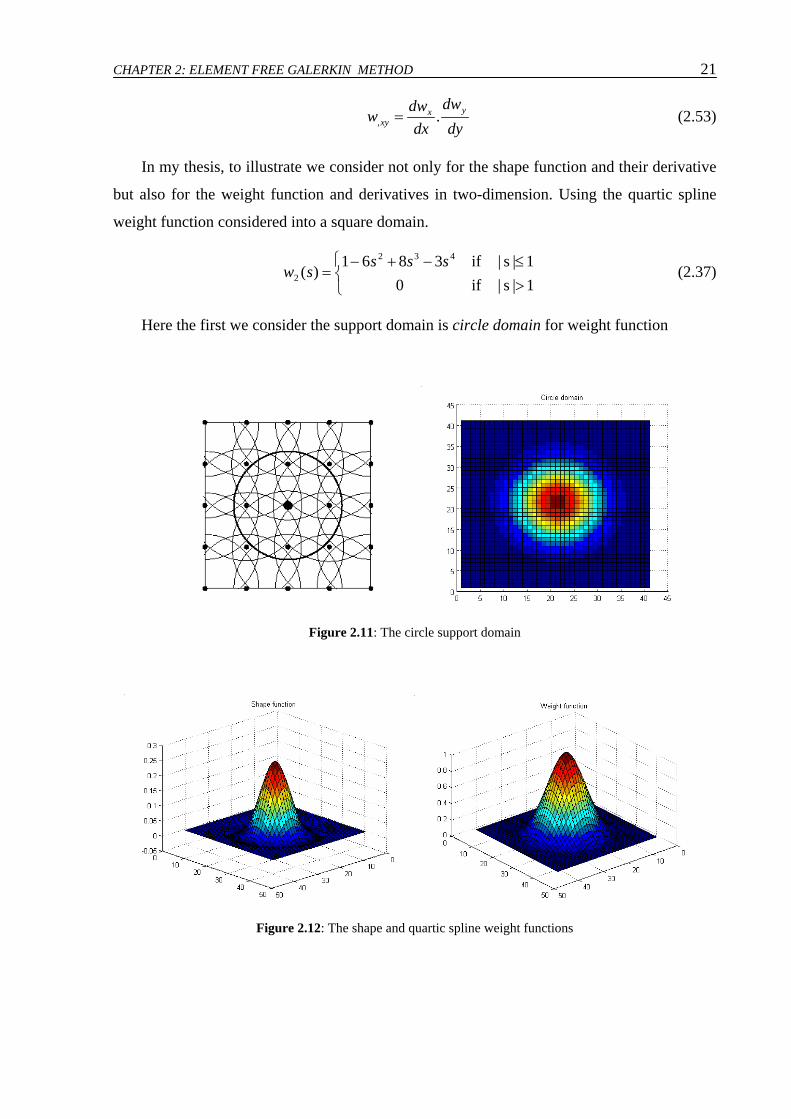
In my thesis, to illustrate we consider not only for the shape function and their derivative
but also for the weight function and derivatives in two-dimension. Using the quartic spline
weight function considered into a square domain.
(2.37) ⎩⎨⎧
>≤−+−
=1|s|if01|s|if3861
)(432
2sss
sw
Here the first we consider the support domain is circle domain for weight function
Figure 2.11: The circle support domain
Figure 2.12: The shape and quartic spline weight functions

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 22
Figure 2.13: The x- derivatives of shape and weight functions
Figure 2.14: The y- derivatives of shape and weight functions
Figure 2.15: The xx- derivatives of shape and weight functions

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 23
Figure 2.16: The yy- derivatives of shape and weight functions
Figure 2.17: The yy- derivatives of shape and weight functions
In the derivatives of the shape and weight functions, the first- and second-derivatives are
must be symmetric.

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 24
The second we consider the support domain is rectangular domain for weight function
Figure 2.18: The rectangular support domain
Figure 2.19: The x- and y- derivatives of shape functions
Figure 2.20: The xx- and yy- derivatives of shape functions

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 25
2.8 Algorithm to compute the shape function and their derivatives , kI ,φIφ and klI ,φ
List of candidate nodes
of problem domain
Set up initial symmetric matrices A , k,A , kl,A
and )()( II xx Τpp are equal zero for 2,1, =lk .
Loop on all the candidate nodes and compute the weight function )(xIw and their derivatives )(, xkIw and )(, xklIw . If the weight
function of the candidates is non-zero, it is an influencing node
Determine the influence domain at point Ix
Store the weight function )(xIw and its derivatives )(, xkIw and )(, xklIw .
Add the contribution of this candidate to A by equation (2.13a), k,A by equation (2.23) and
kl,A by equation (2.26) for 2,1, =lk with the help of the pre-computed dyadic product
)()( II xx Τpp by equations (2.33) or (2.34).
Compute the Cholesky factorisation of A . We can use the computationally more efficient Cholesky factorisation instead of
the LU factorisation since A is symmetric definite positive.
Compute p
Compute pAc 1−= also by equation (2.20) with the help of the factorisation of A .
1

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 26
1
Compute k,p , kl,p . For 2,1, =lk
Compute k,c and kl,c by equations (2.22) and (2.25) with the help of the factorisation of A . For 2,1, =lk
Loop on all the influencing nodes ),2,1( nI L= for 2,1, =lk
Compute )()( IxpxcΤ , )()(, Ik xpxcΤ and )()(, Ikl xpxcΤ with the help of the pre-computed )( Ixp
Compute the shape function )(xIφ by equation (2.19) knowing )()( IxpxcΤ and the stored )(xIw
Compute kI ,φ and klI ,φ by equations (2.21) and (2.24)
knowing )()(, Ik xpxcΤ ; )()(, Ikl xpxcΤ ; k,c and kl,c , the pre-computed )( Ixp and the stored )(xIw , )(, xkIw and )(, xklIw .
End
Figure 2.21: Flowchart of algorithm to compute the shape function and their derivatives
This algorithm based on the PhD thesis of Duflot (2004) and Duflot (2005). Currently
there are many other methods to compute the MLS shape functions and their derivatives.

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 27
2.9 Weak form or variational formulation
The weak forms to be used in meshless methods are the same as those used in FEM. In
FEM, one seldom uses the constrained principles and weak forms. The procedures used in
applying these weak forms in meshless methods will be slightly different from those in FEM,
because of the difference in the forms of the shape functions. The integration domain may no
longer be the union of the element, and it may overlap depending on the meshless method
used.
The EFG method employed the Galerkin weak form to derive the discretize system
equations from strong form system equations. We will present in detail the Galerkin
variational principle or weak form of equilibrium equations are posed in the chapter three for
both models. Besides we will use the Lagrange multipliers to impose the essential boundary
conditions.
2.10 Conclusions
In the EFG method, the shape function does not satisfy the Kronecker delta criterion, i.e.,
IJJI x δφ ≠)( . Consequently, the imposition of essential boundary conditions is more
complicated than for the standard EFM. Currently, there are several methods have been
developed, including Lagrange multipliers Belytschko, Lu and Gu (1994), modified
variational principles Lu, Belytschko, and Gu (1994), and in the FE-EFG coupled method as
in Belytschko, Organ and Krongauz (1995), etc. These issues can be avoided if the essential
boundaries are along finite element domains, where the essential boundary conditions can be
prescribed directly as nodal values.
Properly choosing the domain of influence or nodal support is an important aspect of
meshless methods. The size of the support should be sufficiently large so that the moment
matrix is regular and well conditioned. So, the spatial distribution of neighbors is fairly even.
On the other hand, choosing domains of influence that are too large leads to a great deal of
computational expense in forming the approximations as well as assembling the stiffness
matrix. Support sizes that are too large also detract from the local character of the
approximation, for problems involving sharp gradients; some loss of accuracy is typically
noted as the effect of the gradient is smeared.

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 28
66 ×Figure 2.22: The example for the integration of Gauss quadrature point

CHAPTER 2: ELEMENT FREE GALERKIN METHOD 29
In Chapter 3, to compute the stiffness and flexibility matrices, force vectors, etc requires
integration over the domain Ω or a part Γ . Which in two-dimensions corresponds to an area
integration. Currently there are many techniques to compute the numerical integration such as
cell quadrature, element quadrature or the technique of nodal integration was proposed by
Beissel and Belytschko (1996), Dolbow (1998), Dolbow and Belytschko (1999), etc. But in
this thesis, element quadrature is used with Gauss quadrature points in each cell by numerical
integration, for example as in figure 2.22.





























