Embed Size (px)
Citation preview

Universita degli Studi di Padovafacolta di scienze matematiche, fisiche e naturali
corso di laurea in fisica
Caratterizzazione di un amplificatore meccanicoper rivelatori
di onde gravitazionali
Relatore: Prof. Massimo Cerdonio ChiaromonteCorrelatore: Dott. Jean-Pierre Zendri
Laureando: Alessandro Venturini
Anno Accademico 2004/2005

This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike License.To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-sa/2.0/it/ or senda letter to Creative Commons, 559 Nathan Abbott Way, Stanford, California 94305, USA.If you are looking for an electronic copy of this work search aleph.fisica.indivia.net website. Pleaseuse open-source software and recycled paper.

Indice
1 Onde gravitazionali e rivelatori 71.1 La radiazione gravitazionale . . . . . . . . . . . . . . . . . . . . . . . . . 71.2 Strumenti per la rivelazione . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Dual e l’amplificatore meccanico 102.1 Il rivelatore Dual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2 Amplificatore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3 Riscontro sperimentale 143.1 Apparato sperimentale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.2 Misure e analisi dei risultati . . . . . . . . . . . . . . . . . . . . . . . . . 163.3 Discussione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4 Conclusioni 22

Alle mie nonne
Riassunto
Questo testo rende conto del lavoro svolto nei mesi di maggio e giugno 2005 nell’am-bito dell’esperimento Auriga presso i Laboratori Nazionali di Legnaro (Padova) del-l’INFN. L’attivita cui ho collaborato rientra in una linea di ricerca sviluppata dal gruppoAuriga volta alla progettazione di un nuovo tipo di rivelatore massivo di onde gravita-zionali, denominato Dual. Un passo preliminare nello studio di fattibilita di tale generedi rivelatore consiste nella realizzazione di un amplificatore meccanico di spostamento:tale macchina rappresenta infatti il primo anello della catena di trasduzione del segnalenel progetto di rivelatore Dual. La misura della funzione di trasferimento diretta e in-versa di questo amplificatore e l’oggetto di questa tesi.
Il primo capitolo introduce brevemente la teoria della radiazione gravitazionale ei tentativi della sua verifica sperimentale, delineando i principi di funzionamento deirivelatori di tipo massivo —di cui Auriga fa parte— e interferometrico.
Nel capitolo secondo si espone l’idea alla base del rivelatore a due masse e la necessitadell’amplificazione meccanica del segnale. Viene descritto l’amplificatore realizzato el’oscillatore di test necessario alla sua caratterizzazione; vengono presentate le funzionidi trasferimento teoriche.
Il terzo capitolo descrive l’apparato sperimentale nei suoi dettagli e le operazioni dimisura eseguite; vengono analizzati i dati e confrontati con il modello, per trarre quindinella quarta e ultima parte le conclusioni dell’esperienza.
Io stimo piu il trovar un verobenche di cosa leggiera
che disputar lungamentedelle massime questioni
senza conseguir verita nissuna
Galileo


Capitolo 1
Onde gravitazionali e rivelatori
1.1 La radiazione gravitazionale
La teoria della gravitazione di Newton, il gioiello della fisica classica che descriveva massetra loro interagenti in modo istantaneo, e libere di muoversi in uno spazio euclideo dotatodi tempo assoluto ed uniforme, resistette per due secoli fino all’avvento di Einstein.Con la formulazione della relativita generale (1916) il paesaggio newtoniano mutavaradicalmente: tempo e spazio assoluti perdevano le loro identita separate, per formareun’unica varieta a quattro dimensioni, tutt’altro che omogenea e immutabile, bensı curvae mobile. Uno scenario in cui la massa informa lo spazio, il quale a sua volta detta allaprima le regole del moto, secondo una catena di cause ed effetti altamente non-lineare.
Tale complessita si riduce tuttavia al semplice modello classico quando consideria-mo un campo gravitazione debole e statico, nel quale le particelle si muovono a bassevelocita: al limite in cui il campo e nullo, lo spaziotempo e piatto ed e descritto dallametrica di Minkowski η = diag(−1, 1, 1, 1). Una buona approssimazione, meno esigen-te, dello spaziotempo vicino si puo ottenere anche rinunciando alla staticita del campogravitazionale, introducendo una piccola perturbazione h alla metrica di Minkowski:gµν = ηµν + hµν . In questo ambito (approssimazione di campo debole) le equazioni diEinstein si linearizzano e ammettono come soluzioni una base di onde piane. Tali funzio-ni presentano le caratteristiche classiche delle onde: vige il principio di sovrapposizione,trasportano energia e momento. Esse si manifestano geometricamente come una pertur-bazione della curvatura dello spaziotempo, ovvero —in un’interpretazione significativaai fini della rivelazione, come si spiega piu sotto— come una variazione momentaneadelle distanze mutue tra le curve geodetiche di tale varieta.
Analogamente alla radiazione elettromagnetica, la radiazione gravitazionale e pro-dotta dall’accelerazione delle cariche (masse); tuttavia tale genere di emissione non pre-senta componenti mono– o dipolari, ma solo quadrupolari e successive. Questo significache solo sistemi di masse accelerate in modo non simmetrico emettono onde gravita-zionali: tipico esempio e il caso di un sistema binario di stelle orbitanti intorno al lorocentro di massa. Il sistema PSR 1913+16 e in effetti la piu importante prova indirettadell’esistenza della radiazione gravitazionale: Hulse e Taylor ne hanno misurato per annila diminuzione del periodo, mostrando con grande precisione come la perdita di energiadel sistema sia pari a quella prevista dalle equazioni di Einstein nel caso di emissionegravitazionale. Tale prova e valsa a questi due ricercatori il premio Nobel per la Fisicadel 1993.
7

1.2 Strumenti per la rivelazione
I primi tentativi di rivelazione diretta delle onde gravitazionali risalgono ormai a piu diquaranta anni fa, da quando cioe Joseph Weber all’Universita del Maryland, all’iniziodegli anni 1960, costruı una barra risonante in alluminio della massa di 2 tonnellate.Da allora sono stati fatti significativi passi in avanti, ripensando le tecnologie esistentie inventandone di nuove, sempre perseguendo l’obiettivo della massima sensibilita deglistrumenti: da Weber ad oggi essa e migliorata di cinque ordini di grandezza [2].
Si espongono qui i princıpi su cui sono basati i moderni rivelatori.
Rivelatori massivi
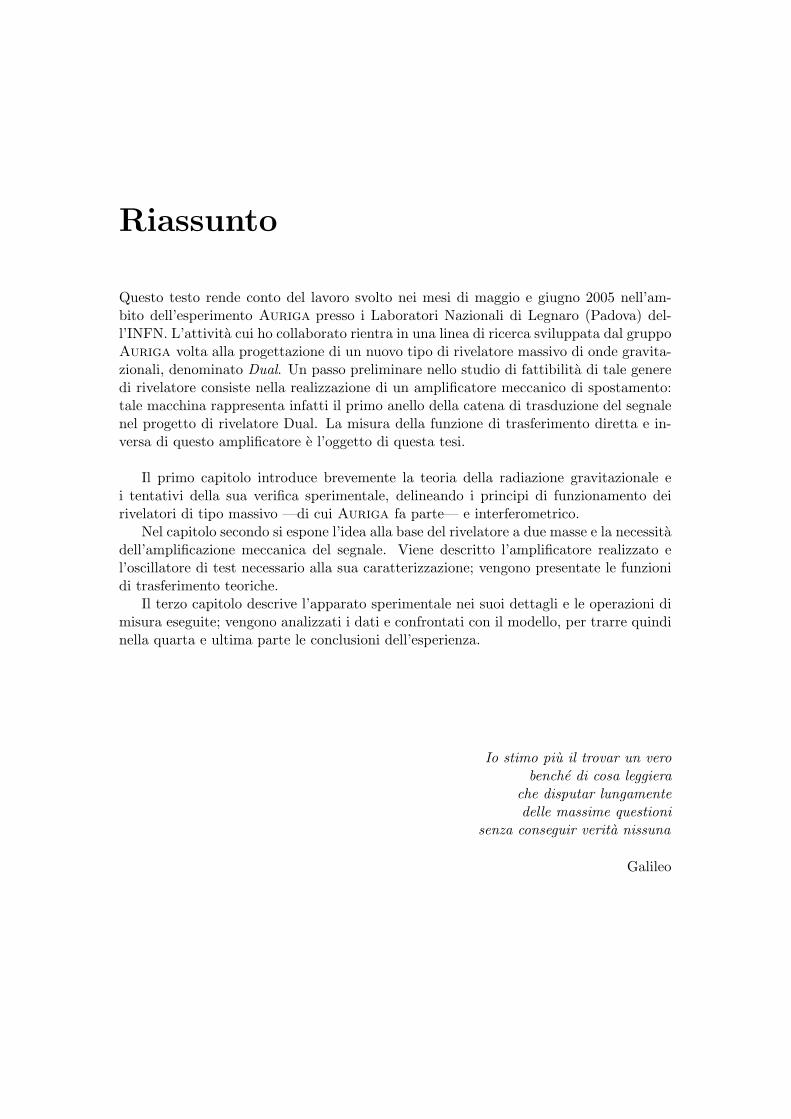
Auriga (Antenna Ultracriogenica Risonante per l’Indagine Gravitazionale Astronomi-ca), cosı come tutti gli altri rivelatori di tipo risonante, e nella sostanza un accelerometrodifferenziale atto a misurare gli effetti prodotti sulla materia dal passaggio di un’ondagravitazionale. Questa, come si e accennato sopra, e una perturbazione dello spazio-tempo, varieta le cui geodetiche la materia tende naturalmente a seguire. La lega dialluminio di cui e costituita la barra, tuttavia, e materia aggregata, i cui atomi sonolegati da mutue interazioni che si oppongono alle variazioni di distanza reciproca pro-dotte dal passaggio dell’onda: l’effetto che si produce e percio una vibrazione d’insiemedi tutta l’antenna. La misura di tali vibrazioni, unita alla conoscenza della funzio-ne di trasferimento del sistema, permette in linea di principio di ricostruire il segnalegravitazionale in ingresso.
La barra e costruita in modo da risuonare meccanicamente vicino a 1 kHz, frequenzaintorno alla quale, si ipotizza, potrebbero trovarsi le emissioni gravitazionali di impor-tanti eventi astronomici. Il fenomeno della risonanza permetterebbe in questo caso diaumentare l’ampiezza dell’oscillazione e percio renderla piu facilmente misurabile. Il se-gnale meccanico, per essere registrato e analizzato, deve essere convertito in un segnaleelettrico. Non avendo tuttavia a disposizione apparati di trasduzione abbastanza efficacida convertire tale piccola oscillazione in un segnale distinguibile dal proprio stesso ru-more elettronico, si e realizzato un trasduttore capacitivo risonante alla stessa frequenzadella barra, e ad esso accoppiato. In questo sistema di due oscillatori accoppiati, antennae capacitore, si osserva che entro un tempo di battimento τ tutta l’energia della barraviene trasferita al piu leggero trasduttore, fornendo cosı un’amplificazione dell’ampiezzadello spostamento proporzionale alla radice quadrata del rapporto delle due masse. Que-sta soluzione ha purtroppo il difetto di limitare notevolmente l’intervallo di frequenzein cui il rivelatore e sensibile, restringendo la banda a ∆ν ∼ τ−1. Per Auriga si trovaattualmente una zona sensibile di circa 50 Hz attorno alla risonanza a 920 Hz [3]; unapossibile realizzazione di rivelatore massivo wide-band e tracciata al capitolo seguente.
L’antenna dei Laboratori Nazionali di Legnaro collabora con altri quattro rivelatorisimili in un consorzio denominato IGEC (International Gravitational Event Collabora-tion) a cui partecipano, oltre ad Auriga , anche Allegro (Lousiana, USA), Explorer(Ginevra, Svizzera), Nautilus (Laboratori Nazionali di Frascati, Roma) e Niobe (Per-th, Australia). Scopo della collaborazione e quello di poter fare analisi di coincidenzatra i cinque rivelatori; purtroppo difficolta tecniche hanno permesso fino ad oggi di ot-tenere che al massimo tre antenne fossero in presa dati contemporaneamente, e solo perbrevi periodi di tempo (pochi mesi) [4]; la loro attivita congiunta ha comunque permes-so di porre dei limiti superiori all’intensita di emissione gravitazionale di alcuni eventiastronomici.
8
Interferometri
Un secondo genere di rivelatori, su cui tuttavia non ci soffermeremo a lungo, e quello degliinterferometri laser. Sorti piu recentemente rispetto alle barre risonanti, essi si basanosul principio dell’esperimento di Michelson e Morley, con la differenza che in questo casolo sfasamento tra i due raggi luminosi dovrebbe essere prodotto dalla variazione relativadella lunghezza dei due bracci ortogonali. Piu precisamente, la lunghezza di un braccioe definita dalla posizione di uno specchio riflettente, sospeso e libero di oscillare, cioe diseguire le geodetiche dello spaziotempo; una perturbazione di queste si traduce in unavariazione del cammino ottico dei fotoni, che si ritrovano sfasati all’incrocio dei bracci,producendo una figura di interferenza.
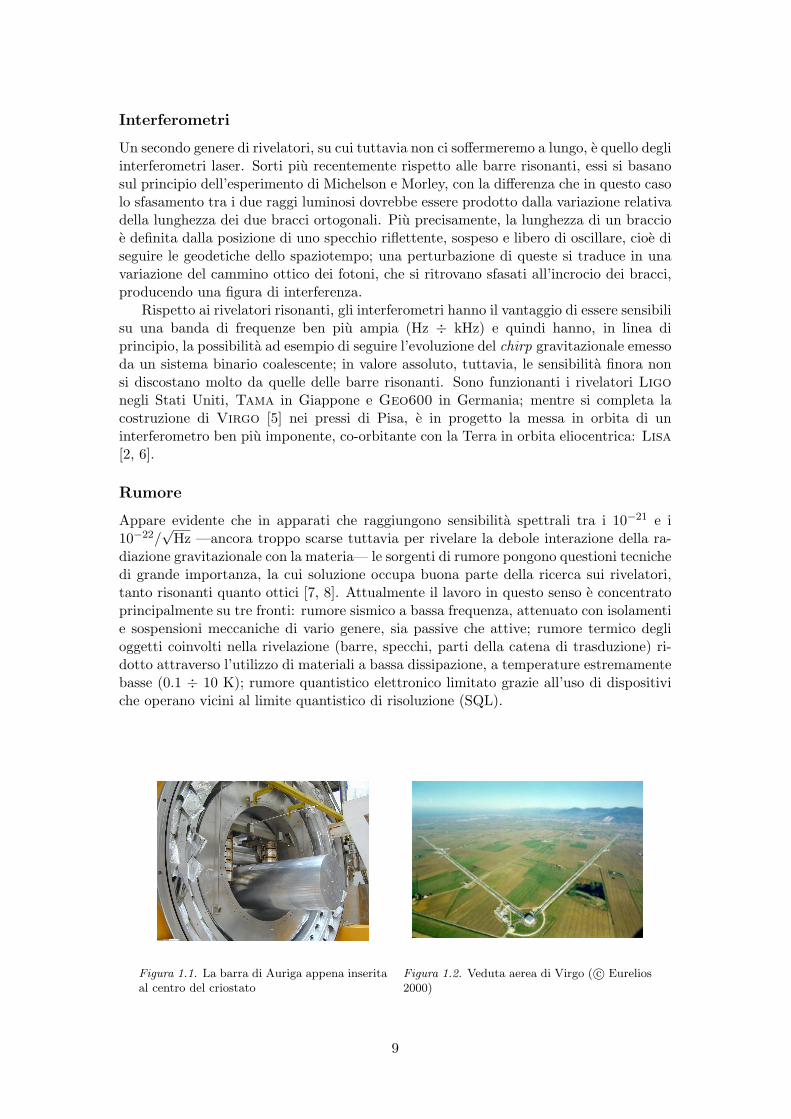
Rispetto ai rivelatori risonanti, gli interferometri hanno il vantaggio di essere sensibilisu una banda di frequenze ben piu ampia (Hz ÷ kHz) e quindi hanno, in linea diprincipio, la possibilita ad esempio di seguire l’evoluzione del chirp gravitazionale emessoda un sistema binario coalescente; in valore assoluto, tuttavia, le sensibilita finora nonsi discostano molto da quelle delle barre risonanti. Sono funzionanti i rivelatori Ligonegli Stati Uniti, Tama in Giappone e Geo600 in Germania; mentre si completa lacostruzione di Virgo [5] nei pressi di Pisa, e in progetto la messa in orbita di uninterferometro ben piu imponente, co-orbitante con la Terra in orbita eliocentrica: Lisa[2, 6].
Rumore
Appare evidente che in apparati che raggiungono sensibilita spettrali tra i 10−21 e i10−22/
√Hz —ancora troppo scarse tuttavia per rivelare la debole interazione della ra-
diazione gravitazionale con la materia— le sorgenti di rumore pongono questioni tecnichedi grande importanza, la cui soluzione occupa buona parte della ricerca sui rivelatori,tanto risonanti quanto ottici [7, 8]. Attualmente il lavoro in questo senso e concentratoprincipalmente su tre fronti: rumore sismico a bassa frequenza, attenuato con isolamentie sospensioni meccaniche di vario genere, sia passive che attive; rumore termico deglioggetti coinvolti nella rivelazione (barre, specchi, parti della catena di trasduzione) ri-dotto attraverso l’utilizzo di materiali a bassa dissipazione, a temperature estremamentebasse (0.1 ÷ 10 K); rumore quantistico elettronico limitato grazie all’uso di dispositiviche operano vicini al limite quantistico di risoluzione (SQL).
Figura 1.1. La barra di Auriga appena inseritaal centro del criostato
Figura 1.2. Veduta aerea di Virgo ( c© Eurelios2000)
9

Capitolo 2
Dual e l’amplificatore meccanico
2.1 Il rivelatore Dual
Come si e detto i rivelatori acustici contengono, intrinseco nel principio di funzionamento(la risonanza) del loro apparato di trasduzione, un limite alla banda di frequenze cuisono sensibili. Questo difetto potrebbe essere superato con la realizzazione un sistemain cui l’elemento elastico sensibile al segnale gravitazionale sia accoppiato ad un readoutnon risonante.
Il rivelatore di tipo Dual, ancora in fase di progettazione, segue questo principio.Esso e composto da due corpi elastici coassiali o concentrici —nel seguito viene trattatoil caso di un toro esterno e un cilindro interno [9], sebbene sia stato proposto ancheun apparato sferico [10, 11]— e liberi di vibrare, posti naturalmente a temperatureinferiori o dell’ordine del grado Kelvin. Le due masse sono costruite in modo che la piuesterna abbia bassa frequenza del modo fondamentale di quadrupolo (ωL), alta inveceper la massa interna (ωH). L’arrivo di un’onda gravitazionale (nel caso ideale, lungol’asse di simmetria del cilindro) di frequenza ω, con ωL < ω < ωH , eccita l’oscillazionedelle due parti; poiche tuttavia il corpo esterno oscilla sopra risonanza, mentre il corpointerno oscilla sotto risonanza, lo spostamento delle due masse avviene in controfase.L’opposizione di fase si traduce nel fatto che, nell’espressione della distanza relativa trale due superfici affacciate, gli spostamenti dei due singoli corpi relativamente al centrodi massa —non perturbato— si sommano in modulo: risulta percio conveniente leggerecome risposta del rivelatore lo spostamento differenziale delle due masse. La bandasensibile del rivelatore Dual risulterebbe in tal modo essere l’intervallo (ωL, ωH) ovveroapprossimativamente da 2 a 6 kHz: un sostanziale miglioramento rispetto alle pochedecine di Hz della barra attuale.
I primi calcoli fatti su un ipotetico doppio toro in molibdeno con readout allo Stan-dard Quantum Limit portano ad una sensibilita in spostamento di 3÷5×10−23 m/
√Hz,
confrontabile con quella dei grandi interferometri nella loro versione avanzata. La rea-lizzazione di un’amplificazione allo SQL non e verosimilmente cosı distante nel tempo,dato che Auriga monta attualmente uno SQUID a 200~, le cui prestazioni potrebberoulteriormente migliorare a temperature sotto il grado Kelvin (i primi test indicano 30~a 100 mK). Per quanto riguarda l’apparato di trasduzione, la strada per raggiungerela sensibilita richiesta passa attraverso diverse tappe. Innanzitutto una “buona” sceltadella geometria della zona di lettura del segnale porterebbe all’amplificazione dei modidi oscillazione quadrupolari, cioe i soli che portano l’informazione gravitazionale, e aduna corrispondente depressione dei modi ad alta frequenza nonche del rumore introdot-to dall’apparato di trasduzione stesso (forza di back-action), in quanto esso agirebbein fase sulle due masse. Un risultato di questo tipo si potrebbe ottenere misurando
10

lo spostamento relativo delle due superfici cilindriche su quattro aree disposte a crocecome in figura. Una misura su una superficie ampia riesce intrinsecamente a mediare azero i contributi al rumore dei modi di oscillazione spurii ad alta frequenza; inoltre duesistemi di lettura posti a 45◦ permetterebbero di risolvere le polarizzazioni ortogonali+ e × dell’onda gravitazionale [12]. La realizzazione pratica della trasduzione si av-varra di una delle due tecnologie sviluppate e continuamente raffinate nell’ambito dellaricerca sulla radiazione gravitazionale specialmente dal gruppo Auriga , ovvero la tra-sduzione opto-meccanica (interferometria laser) e quella di tipo capacitivo. Entramberichiederebbero tuttavia miglioramenti in sensibilita di circa un ordine di grandezza persoddisfare la richiesta di 10−23 m/
√Hz.
Nell’attesa che questi risultati vengano raggiunti un’altra via viene investigata. Unapre-amplificazione meccanica (' 10×) dello spostamento differenziale da misurare, ot-tenuta attraverso la deformazione di un meccanismo elastico —compliant— che non siauna sorgente significativa di rumore, potrebbe venire incontro agli sforzi per perfezionarela trasduzione ottica o capacitiva. Queste le caratteristiche richieste all’oggetto studiatoin questa tesi, descritto in dettaglio nel paragrafo seguente.
Figura 2.1. Schema del rivelatore Dual. Sono evidenziate in nero le quattro aree di letturadello spostamento differenziale dei due tori, esagerato nella visione in pianta
2.2 Amplificatore
La progettazione di un amplificatore meccanico a leverismo per un rivelatore di tipo Dualha costituito il lavoro di tesi del dott. Michele Bignotto —riportata in bibliografia con ilriferimento [13]—, lavoro confluito nella costruzione presso la ditta CINEL dell’oggetto infigura 2.3. La misura della funzione di trasferimento diretta e inversa di tale amplificatoree precisamente il fine di questa tesi.
Figura 2.2. Profilo dell’amplificatore. Sonoevidenziate le cerniere
Figura 2.3. L’amplificatore realizzato in legaAl-Mg (360 g, 90× 38× 60 mm)
11

L’obiettivo con cui si e progettato l’amplificatore e stato quello di ottenere un le-verismo capace di produrre una moltiplicazione in spostamento di un fattore 10 al disotto della prima frequenza di risonanza dell’oggetto (almeno 5 kHz), e i cui movimen-ti fossero localizzati prevalentemente in cerniere soffici (indicate nel disegno 2.2; C eC ′ nello schema 2.4) piuttosto che nelle aste (L), in modo da non influire sul mecca-nismo di amplificazione. In altre parole, si e cercato di progettare un leverismo il cuifattore di guadagno dipendesse esclusivamente dalle sue proprieta geometriche e nondi altro tipo, secondo il seguente modello a rombo: se le aste sono rigide, si avra cheL2 = a2 + b2 in condizioni di equilibrio, mentre per un piccolo spostamento (∆x,∆y)sara L2 = (a − ∆x)2 + (b + ∆y)2. Confrontando le due espressioni e tralasciando gliinfinitesimi di second’ordine si ottiene facilmente 2a∆x = 2b∆y ovvero
G =∆y
∆x=
a
b=
1tanα
' 1α
ove l’ultimo passaggio vale se α � 1; nel nostro caso per avere G ' 10 sceglieremoα = 0.1 rad ' 5.7◦.
b
x1 x2
y1
y2
L
C C
C’
C’
a
α ∆x
∆y
Figura 2.4. Schema geometrico dell’amplificatore. La posizione di equilibrio e espressa dallecoordinate x1 = x2 = y1 = y2 = 0
Una volta realizzato l’amplificatore, e stato progettato, al fine di caratterizzarlo, unapparato che simulasse il rivelatore Dual. Si puo mostrare che un oscillatore armonicocapace di ospitare l’amplificatore e il sistema che risponde allo scopo: percio e statocostruito un solido dello stesso materiale dell’amplificatore (lega alluminio-magnesioAlumold 1-600; circa 11 kg; 280 × 150 × 150 mm) il cui comportamento —riprodottoagli elementi finiti— dovrebbe essere assimilabile a quello di una coppia di masse ugualiche sollecitano l’amplificatore lungo l’asse x. La geometria di tale oscillatore e statastudiata in modo da avere frequenza di risonanza longitudinale inferiore a quella propriadell’amplificatore.
Figura 2.5. Schema di oscillatore (blu) eamplificatore (giallo, all’interno)
Figura 2.6. L’oscillatore realizzato. All’internoe visibile l’amplificatore meccanico
12

Un modello a elementi concentrati del sistema oscillatore+amplificatore piu detta-gliato di quello, elementare, tratteggiato in figura 2.5, si trova ben descritto e risoltoin [13]. Esso tuttavia non ha ragione di comparire qui, in quanto l’andamento teoricodel guadagno, cui ci si e riferiti in sede di analisi delle misure, non e ricavato da talecomplessa schematizzazione, bensı dalla piu realistica simulazione FEM. In particolareil dott. Bignotto ci ha gentilmente fornito le previsioni per la funzione di trasferimentodiretta (spostamento sull’asse y dovuto a sollecitazione lungo x) e inversa (spostamentolungo x con sollecitazione parallela a y).
-200 0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200
4
6
8
10
20
40
60
80
100
200Funzioni di trasferimento
simulazioni agli elementi finiti
Direct Gain
Inverse Gain
Gain
frequenza (Hz)
Figura 2.7. Predizioni del guadagno diretto e inverso del sistema oscillatore+amplificatore,in funzione della frequenza
Si nota come nella previsione teorica il guadagno diretto sia circa costante attornoa 10 fino a circa 1 kHz, per poi presentare una risonanza a 1580 Hz, indi diminuirebruscamente. Regolare e monotono e invece l’andamento del guadagno inverso.
13

Capitolo 3
Riscontro sperimentale
3.1 Apparato sperimentale
Metodo di misura
In riferimento alla figura 2.4 si puo vedere che, nelle approssimazioni fatte, per un’oscil-lazione del leverismo attorno alla sua posizione di equilibrio si puo adottare il sistemadi assi (x1,2, y1,2) e scrivere ∆x = −(x1 + x2) e ∆y = y1 + y2. Se ora si definiscono lequattro coordinate spostamenti comuni xc, yc e spostamenti differenziali xd, yd come
xc =x1 − x2
2yc =
y1 − y2
2; xd =
x1 + x2
2yd =
y1 + y2
2
si puo esprimere il guadagno come G = −yd/xd. Lo strumento ideale per misurare glispostamenti relativi xd, yd sarebbe un sistema di lettura puramente differenziale rife-rito al centro di massa del sistema, quale ad esempio un trasduttore ottico basato sucavita Fabry-Perot —il quale peraltro sia l’oscillatore che l’amplificatore sono predispo-sti ad alloggiare— tuttavia non ancora realizzato. L’alternativa che abbiamo seguito estata percio quella di misurare il guadagno1 non come rapporto di spostamenti, ma diaccelerazioni:
G = − yd
xd
Per produrre le accelerazioni sul sistema oscillatore+amplificatore ci siamo servitidi attuatori piezoelettrici della Matrox, piccoli dispositivi ceramici la cui vibrazionee proporzionale alla differenza di potenziale elettrico applicata sulle due facce. Taled.d.p., in forma di segnale sinusoidale, e fornita dal generatore di forme d’onda a duecanali indipendenti HP 3326A, talvolta amplificato 200 volte da un Piezoelectric DeviceHigh Voltage Driver (PDHVD) costruito dal Dipartimento di Fisica dell’Universita diPadova. Per leggere le oscillazioni indotte dagli attuatori sulle parti del sistema abbiamoutilizzato accelerometri piezoelettrici (PCB Piezotronics, modelli 351B11, 351B41,353B33) la cui uscita, amplificata 10 o 100 volte da due amplificatori (PCB 482A16),viene analizzata da una coppia di lock-in (EG&G 5210) riferiti al segnale prodotto dalgeneratore di forme d’onda. Sia quest’ultimo che i lock-in sono controllati via PC da unsoftware che permette di acquisire una serie di misure in un intervallo di frequenze.
L’insieme di oscillatore, amplificatore, piezo-attuatori e accelerometri e stato sospeso,con lo scopo di isolare meccanicamente il sistema, alla test facility esistente ai Laboratori,la quale consiste in un sistema di sospensioni attenuanti circa 140 dB a 500 Hz inserite inuna camera da vuoto (10−3 ÷ 10−2 mbar). L’accorgimento di eliminare l’aria intorno al
1Si chiama funzione di trasferimento il guadagno in funzione della frequenza.
14

sistema si e reso necessario per evitare scariche da parte di elementi scoperti, allorquandoil segnale era ad alta tensione (fino a 400 Vpp), e per ridurre il rumore acustico riversatosull’apparato.
Dei quattro attuatori utilizzati, due (shaker pesanti) erano caricati con un cilindrettodi circa 150 g di ottone ciascuno, fissati ad una vite e da questa isolati da 1 mm di ma-cor; la seconda coppia, di dimensioni minori (shaker leggeri) era caricata con massettefilettate di 2.63 e 2.65 grammi. Si puo dimostrare [15] che, usando shaker piezoelettrici,la forza indotta da questi e proporzionale alla tensione e alla quarta potenza della fre-quenza: nel nostro caso abbiamo ottenuto valori tipici di 10−4÷10−2 N con una tensionein ingresso dell’ordine di 100 Vpp, nel range fra 300 e 800 Hz.
Setup I
In una prima configurazione dell’apparato, volta alla misura della funzione di trasferi-mento diretta, gli shaker pesanti SP vengono avvitati al centro delle facce esterne dell’o-scillatore (asse x), alle quali sono attaccati anche due accelerometri f che serviranno allalettura di x1, x2. Sull’amplificatore, bloccato con quattro viti all’interno dell’oscillatore,sono alloggiati altri due piccoli accelerometri a che misurano l’accelerazione lungo y.
oscillatore
f
SP
f
SP
y
x
a
aamplificatore
Figura 3.1. Disposizione di shaker e accelerometri nel setup IFigura 3.2. Particolare di uno shaker pesante (in alto, freccia rossa) e di un accelerometro f(freccia blu)
oscillatore
s
f
y
xa
L
amplificatore
s
af
Figura 3.3. Disposizione di shaker e accelerometri nel setup IIFigura 3.4. Particolare di uno shaker leggero applicato all’amplificatore
Setup II
Per la misura della funzione di trasferimento inversa si richiedeva che l’amplificatorefosse sollecitato lungo l’asse y. Percio la seconda configurazione sperimentale e stata
15

messa a punto avvitando gli shaker leggeri s sulle facce dell’amplificatore predisposteper alloggiare gli specchi del sistema di lettura ottico (y1, y2), e gli accelerometri asono stati posti invece sulle facce interne dell’amplificatore per la lettura di y1, y2. Unaccelerometro L e stato fissato sul lato dell’oscillatore per misurare il suo moto lungo y;sono rimaste infine immutate le posizioni degli altri due accelerometri f, f .
3.2 Misure e analisi dei risultati
Operazioni di misura
Poiche, come si e visto, solo gli spostamenti (le accelerazioni) differenziali delle partidell’amplificatore sono significative ai fini della misura del guadagno, si e resa neces-saria, preliminarmente ad ogni operazione di misura, una fase di bilanciamento delleforze con lo scopo di ridurre al minimo gli spostamenti comuni, ossia le oscillazioni infase di tutte le componenti del sistema; tali moti, oltre che inutili, rischiano di avereun’ampiezza confrontabile o maggiore dei moti differenziali, aumentando dunque l’in-certezza sperimentale di questi ultimi. Nella pratica, tale calibrazione e stata eseguitamodificando leggermente i valori di tensione forniti dal generatore ai due shaker, i qualiidealmente dovrebbero essere identici, mentre invece rispondono in modo differente aparita di sollecitazione. Con una serie di veloci misure preliminari abbiamo trovato cheuno sbilanciamento del 5% ÷ 10% tra le tensioni dei due canali riduceva al minimo leaccelerazioni comuni (tipicamente a 1/10 delle accelerazioni differenziali).
L’operazione di misura vera e propria consiste in questo processo:
• il generatore di forme d’onda produce due tensioni sinusoidali di ampiezza legger-mente diversa, ma con la stessa frequenza e fase; la tensione viene eventualmenteamplificata 200 volte dal PDHVD;
• tali segnali vanno a sollecitare gli shaker sull’oscillatore (asse x, setup I) o sull’am-plificatore (asse y, setup II), i quali vibrano con accelerazione proporzionale allatensione applicata;
• gli accelerometri disposti sul sistema leggono la vibrazione locale, producendo comeoutput una tensione proporzionale all’accelerazione subita; tale uscita e amplificata10 o 100 volte dal PCB;
• i due lock-in analizzano il segnale di una coppia di accelerometri, dando l’ampiezzadella componente di Fourier alla frequenza del segnale d’ingresso;
• il PC legge l’output dei due lock-in.
Il software di controllo permette di eseguire automaticamente una serie di misure im-postando gli estremi e il passo dell’intervallo di frequenze da esplorare, e il numerodi misure (“numero di medie”) da compiere su una stessa frequenza. Il file prodottocontiene per ogni frequenza le ampiezze medie misurate e le corrispondenti deviazionistandard.
Si e deciso di compiere le misure nella regione compresa tra 200 e 1200 Hz, in quantol’amplificatore e progettato per avere un guadagno significativo in questa banda; inoltrele sospensioni della test facility sono ivi prive di risonanze. Nell’intorno della risonanza(800 ÷ 1200 Hz) la tensione in ingresso agli shaker e stata ridotta per non avere unsegnale in uscita troppo ampio, che avrebbe portato i lock-in in overload e avrebbepotuto instaurare comportamenti non-lineari. In fase di analisi i campioni cosı raccolti
16

sono stati normalizzati alla tensione fornita durante le misure a frequenze minori di 800Hz: si e pertanto implicitamente riscontrata una discreta linearita del sistema al variaredella tensione in ingresso.
Analisi
Ipotizziamo, in tutta generalita, che il segnale s(t) prodotto da un accelerometro sipossa esprimere come s(t) =
∫∞0 sνdν =
∫∞0 [A(ν) sin(νt) + B(ν) cos(νt)]dν. Il lock-in
allora individua la componente di Fourier sω con ν = ω, frequenza in ingresso aglishaker, e produce come output i valori, mediati su nmedie misure, A(ω), B(ω) e le ri-spettive deviazioni standard σA, σB. La grandezza importante per l’analisi e l’ampiezzadi tale componente del segnale in tensione, |sω| =
√A2 + B2, proporzionale all’am-
piezza dell’accelerazione subita dall’accelerometro: ad esempio per quello posto in x1,|sx1
ω | = px1|x1|, e analogamente per gli altri. Le costanti p, espresse in unita di mV/g,sono fornite dal costruttore.
In queste ipotesi, e tenendo conto degli stadi di amplificazione della tensione tanto iningresso quanto in uscita, abbiamo ricostruito le ampiezze delle accelerazioni x1, x2, y1, y2
e quelle degli accelerometri ausiliari2. Ricaviamo quindi facilmente
xd =x1 + x2
2xc =
x1 − x2
2; yd =
y1 + y2
2yc =
y1 − y2
2
in funzione della frequenza.
200 400 600 800 1000 1200
1E-6
1E-4
0,01
1
100
accele
razio
ne (
m/s
2)
frequenza (Hz)
SETUP I
acc. diff. amp. 16 maggio
acc. diff. osc. 16 maggio
acc. diff. amp. 24 maggio
acc. diff. osc. 24 maggio
996 Hz
1122 Hz
Figura 3.5. Sono riportate due diverse misure degli andamenti delle accelerazioni differenzialidi amplificatore e oscillatore, effettuate con il setup I. Non si riportano per chiarezza le acce-lerazioni comuni, comunque circa un ordine di grandezza inferiori alle rispettive accelerazionidifferenziali
2D’ora in poi sara omesso il simbolo | · |, sottintendendo che trattiamo sempre le ampiezze dei segnalie mai il loro andamento in funzione del tempo.
17

200 400 600 800 1000 1200
1E-6
1E-3
1
818 Hz
1086 Hz
SETUP II
acc. diff. osc.
acc. diff. amp.
acc. com. osc.
acc. com. amp.
acc. laterale
accele
razio
ne (
m/s
2)
frequenza (Hz)
956 Hz
Figura 3.6. Sono rappresentate le accelerazioni differenziali e comuni di oscillatore eamplificatore nel setup II. Sono visibili le due risonanze di moto comune
Otteniamo ora facilmente le funzioni di trasferimento che caratterizzano il sistema—l’amplificatore alloggiato nell’oscillatore di test— preso in considerazione. Premettia-mo pero un’osservazione: ove prima si era trovato G = −yd/xd, il segno meno comparivain conseguenza dell’aver tenuto conto del verso degli spostamenti in x e y; poiche tut-tavia, a causa del metodo di misura utilizzato, trattiamo ora ampiezze di spostamenti(e accelerazioni) sinusoidali, e non l’andamento di queste nel tempo, intendiamo qui ilguadagno come rapporto di tali ampiezze, positive, G = |yd|/| − xd|.
Definiamo quindi le grandezze guadagno diretto (Direct Gain) e guadagno inverso(Inverse Gain), entrambe funzione della frequenza di sollecitazione:
DG(ω) =(
yd
xd
)I
IG(ω) =(
yd
xd
)II
ove gli indici I,II evidenziano che la misura del guadagno diretto e stata ottenuta sol-lecitando il sistema lungo l’asse x dell’oscillatore, e quindi dell’amplificatore (setup I),mentre il guadagno inverso e stato misurato sollecitando l’amplificatore sull’asse y (setupII).
Gli andamenti di queste grandezze sono riportate in grafico, sovrapposte all’anda-mento teorico dato al paragrafo 2.2.
18

200 400 600 800 1000 1200 1400 1600
1
10
100
1000
10000
1580 Hz
Funzione di trasferimento
diretta (Setup I)
misure 16 maggio
misure 24 maggio
simulazione agli elementi finiti
Direct
Gain
frequenza (Hz)
1122 Hz
Figura 3.7. Misure della funzione di trasferimento diretta, a confronto con la predizione FEM
200 400 600 800 1000 1200
30
40
50
60
70
80Funzione di trasferimento
inversa (Setup II)
misure
simulazione agli elementi finiti
Invers
e G
ain
frequenza (Hz)
Figura 3.8. Misura della funzione di trasferimento inversa, a confronto con la predizione FEM
19

3.3 Discussione
Accelerazioni
Nell’analisi delle accelerazioni differenziali e comuni, tanto nel setup I che nel setup IIla prima caratteristica evidente e una risonanza poco sotto i 1000 Hz, corrispondenteal primo modo di vibrazione longitudinale dell’oscillatore di test. La discrepanza (40Hz) tra le due configurazioni e da imputarsi con buona probabilita all’aver cambiato glishaker pesanti con quelli leggeri, e ad una diversa disposizione degli accelerometri sul-l’amplificatore, con una conseguente modifica delle masse efficaci coinvolte. Nella primaconfigurazione sperimentale, inoltre, si trova a 1122 Hz uno zero del moto differenzialedell’oscillatore. Questa peculiarita e spiegabile considerando che la vibrazione del si-stema puo essere espressa come la somma di modi normali; i primi due, schematizzatiin figura 3.9, alla frequenza considerata diventano confrontabili e la loro combinazioneproduce quindi il fenomeno osservato. Secondariamente e da sottolineare la presenzadi due risonanze di moto comune, riscontrate in entrambi i setup (riportiamo in graficosolo i moti comuni del setup II per motivi di leggibilita) a circa 818 e 1086 Hz. Per avereun riscontro di questo moto abbiamo applicato l’accelerometro laterale sull’oscillatore(L nello schema 3.3), la cui risposta e rappresentata dal punto-linea blu nel grafico 3.6.Essa certifica come moto comune il picco trovato a 1086 Hz, mentre resta non chiaro ilcomportamento del sistema vicino a 800 Hz. La causa di questi fenomeni, indesiderati,e da ricercarsi nell’imperfetto bilanciamento degli shaker, nonche nell’accoppiamentodell’oscillatore con qualche parte delle sospensioni. Ricordiamo comunque che i modi divibrazione lungo l’asse y non erano stati modellati in fase FEM.
Figura 3.9. Simulazione agli elementi finiti: i primi due modi normali di vibrazione del sistemaanalizzato, responsabili dell’andamento del grafico 3.5.
Funzioni di trasferimento
Osservando ora le misure della funzione di trasferimento diretta, si nota come i campionisi distribuiscano lungo una curva piu ripida della simulazione, di modo che il guadagnovaria molto (da 10 a 50 in 600 Hz), e inoltre la risonanza e a frequenza piu bassa di quellaprevista. La presenza della risonanza e conseguenza dello zero nel moto dell’oscillatore,il quale a sua volta e effetto della non-rigidita del sistema —al paragrafo 2.2 l’ipotesi diaste rigide aveva condotto alla previsione di guadagno costante. Lo shift rispetto allaprevisione e un fenomeno da chiarire, le cui ragioni potrebbero essere tuttavia cercatenelle tolleranze meccaniche tenute in fase di realizzazione dell’oggetto (ad esempio im-precisioni sul valore del raggio r o dell’angolo γ di figura 2.2) o in stress eccessivi subiti
20

dall’amplificatore, che l’abbiano incrudito modificandone il modulo di Young rispetto aquello intrinseco del materiale utilizzato. Relativamente alla funzione di trasferimentoinversa, la curva sperimentale ha un andamento abbastanza simile a quella teorica, an-che se le due non corrispondono quantitativamente, per le ragioni appena esposte; si hainoltre uno scostamento significativo tra 800 e 900 Hz, effetto di quel fenomeno osservatoprecedentemente nel moto comune.
Errori
Per quanto riguarda le incertezze, segnaliamo che i dati raccolti a bassa frequenza (200÷ 400 Hz) sono molto dispersi e affetti da un’alta deviazione standard, poiche in taleregione il segnale in tensione (µV) prodotto dagli accelerometri si confondeva con ilrumore della catena elettronica di acquisizione. A frequenze maggiori invece la varianzadelle misure diventa trascurabile (tipicamente dell’ordine dello 0.1%): alla componentestatistica dell’errore va comunque aggiunto il contributo sistematico del lock-in, stimabiletra l’1% e il 2%.
21

Capitolo 4
Conclusioni
I dati ottenuti dalle operazioni di misura e dalla loro analisi permettono di elaborareuna visione complessiva del sistema studiato e delle sue prospettive future.
• L’apparato di misura nella sua configurazione attuale ha permesso di ricavarele curve di guadagno mostrato, le quali danno un’idea abbastanza precisa del compor-tamento dell’amplificatore, sollecitato dall’oscillatore di test. Alcune modifiche a taleconfigurazione potrebbero tuttavia aumentare significativamente la qualita delle misure,in particolare: un bilanciamento in forza piu preciso, che eviti il comparire delle risonanzedi moto comune, oppure l’implementazione del citato sistema di lettura ottico.
• Dal lato teorico, le simulazioni agli elementi finiti potrebbero essere raffinate, ana-lizzando i moti del sistema appeso alle sospensioni, alla ricerca di un modello di funzionedi trasferimento piu somigliante a quella trovata sperimentalmente. A questo sforzo po-trebbe essere coniugata una nuova realizzazione dell’amplificatore, piu attenta ai dettaglidi elasticita, affinche l’oggetto reale non si discosti troppo da quello progettato.
• La presenza della risonanza nell’andamento del guadagno dell’amplificatore afrequenza piu bassa di quella prevista, dati i motivi indicati indica chiaramente che ilmodello ad aste rigide e molto grezzo e che l’elasticita del leverismo —o un difetto diessa— gioca un ruolo fondamentale nella sua risposta alle sollecitazioni. Si puo direcomunque che l’obiettivo di realizzare un amplificatore che guadagnasse almeno 10 suuna banda larga di frequenze e stato raggiunto.
• Per quanto riguarda il possibile utilizzo di questo leverismo come amplificatoredel segnale di Dual, si presentano ancora alcune questioni irrisolte. Innanzitutto, giaoggetto di studio, e il rumore termico prodotto dall’amplificatore, che verrebbe iniettatocome forza di back-action nel rivelatore, e che si vorrebbe fosse trascurabile rispettoalle altre sorgenti di rumore; in secondo luogo, nella sua forma attuale, il leverismo nonrisponde a quella richiesta di “lettura su grande area” che dovrebbe intrinsecamentemediare a zero i modi di vibrazione ad alta frequenza del rivelatore. Infine resta daindagare il comportamento dell’oggetto a basse temperature.
In conclusione possiamo dire che il lavoro svolto e servito a dare una prima, basilarecaratterizzazione dell’amplificatore. Nella prospettiva di un suo effettivo utilizzo in unrivelatore di onde gravitazionali, questo studio si colloca come un punto di partenza,lasciando aperte ampie possibilita per ulteriori indagini.
22

23

Bibliografia
[1] I. Chakrabarty, Gravitational Waves: An Introduction, arXiv:physics/9908041(1999)
[2] H.-P. Nollert, Gravitational Wave Astronomy, Annalen Der Physik, 9, 3–5 (2000)
[3] Sito web di Auriga , http://www.auriga.lnl.infn.it
[4] Sito web di IGEC, http://igec.lnl.infn.it
[5] Sito web di Virgo, http://www.virgo.infn.it
[6] Sito web di Lisa, http://lisa.jpl.nasa.gov
[7] Jim Hough e Sheila Rowan, Gravitational Radiation Detectors on Earth and in Spa-ce, in Encyclopedia of Astronomy and Astrophysics, Institute of Physics Publishing,Bristol, and Macmillan Publishers, London, 2000
[8] Tito Dal Canton, Studio di eventi del rivelatore AURIGA per l’analisi in coincidenzacon i rivelatori IGEC, tesi di Laurea in Fisica, Universita di Padova, 2005
[9] Michele Bonaldi et al., A broad band detector of Gravitational Waves: The dualtorus, in Gravitational Waves and Experimental Gravity, proceedings of the XXX-VIIIth Moriond Workshop (Les Arcs, France, 22–29 March 2003), eds. Dumarchezand J. Tran Thanh Van, The Gioi Publishers, Vietnam (2003) p. 227-232
[10] Massimo Cerdonio et al., Wideband dual sphere detector of gravitational waves,Phys. Rev. Lett. 87, 031101 (2001), anche in arXiv:gr-qc/0011002
[11] T. Briant et al., Thermal and back-action noises in dual sphere gravitational wavedetectors, Phys. Rev. D, 67, 102005 (2003)
[12] Michele Bonaldi et al., Wide bandwidth dual acoustic gravitational wave detectors,Class. Quant. Grav. 21 (2004) S1155-S1159, proceedings of the 5th Edoardo AmaldiConference on Gravitational Waves, July 6–11, 2003, Tirrenia (Pisa), Italy.
[13] Michele Bignotto, Progettazione e caratterizzazione di un amplificatore meccanicoper rivelatori massivi di onde gravitazionali, tesi di Dottorato di Ricerca in Fisica,Universita di Padova, 2004
[14] Michele Bignotto et al., Dual Detectors of Gravitational Waves, Proceedings ofAstronomical Telescopes and Instrumentation, 21-25 June 2004, Glasgow, Scotland,Proceedings of SPIE – Volume 5500 Gravitational Wave and Particle AstrophysicsDetectors, J. Hough, G. H. Sanders, Editors, September 2004, pp. 105-112
[15] Nicola Liguori e Jean-Pierre Zendri, Misura della massa efficace della barra e tuningTrasduttore-Barra, 2003, comunicazione privata
24

[16] Michele Bignotto, Study and characterization of the Bernarda’s working principle,comunicazione privata
[17] Jean-Pierre Zendri, Considerazioni sulle misure di amplificazione meccanica, 2005,comunicazione privata
[18] Bernard F. Schutz, Gravitational Radiation, in Encyclopedia of Astronomy andAstrophysics, Institute of Physics Publishing, Bristol, and Macmillan Publishers,London, 2000, anche in arXiv:gr-qc/0003069
[19] Rainer Weiss, Gravitational radiation, Rev. of Modern Physics, Vol. 71, No. 2(1999)
[20] Livia Conti et al., Dual detector of gravitational waves, Proceedings of the 28thInternational Cosmic Ray Conference (Tsukuba, Japan, July 31–August 7, 2003)edited by Kajita, Asaoka, Kawachi, Matsubara and Sasaki, Univ. Ac. Press, Tokyo(2003), p. 3123-3126
[21] Michele Bonaldi et al., Selective readout and back-action reduction for widebandacoustic gravitational wave detectors, Phys. Rev. D 68, 102004 (2003), anche inarXiv:gr-qc/0302012
Ringraziamenti
L’attivita descritta in questa tesi e stata finanziata in parte da Ego (European Gra-vitational Observatory) nell’ambito del progetto di R&D “Wideband transducers for aDUAL cylinder detector”.
Sono grato a Luca, Antonello, Massimo, Francesco, Stefano, Antonella, Gabriele e atutto lo staff di Auriga per avermi supportato e guidato durante la mia esperienza; aJean-Pierre in particolare per la pazienza e la fiducia dimostratami e per cio che mi hainsegnato; a Tito per essermi stato compagno nell’entusiasmo con cui ci siamo lanciatiin questa che e iniziata come un’avventura. Infine un ringraziamento speciale a Michele,il quale
• incalzato da Jean, ha smanettato a lungo per trovare un modello FEM dellafunzione di trasferimento che si adattasse alle mie misure
• ha scritto [16]
• ha tenuto alto il morale con i racconti delle sue lezioni di tango e le profezie sugliuomini e le donne giapponesi
ma soprattutto perche e il padre biologico di Bernarda e Fisarmonica, le malvage sorelle,e in quanto tale e stato il destinatario delle mie incazzature e anatemi contro un sistemadotato di beffarda ironia.
25





























