Embed Size (px)
Citation preview

Přednáška č. 11
ÚVOD DO MODELOVÁNÍ V MECHANICE
Ing. Lud ěk Hyn čík, Ph.D.
BIOMECHANICKÉ MODELY ČLOVĚKA

OBSAHOBSAH
•• Modely na bModely na b áázi tuhých tzi tuhých t ěěles (multiles (multi --body)body)
•• Jednoduchý 1D modelJednoduchý 1D model
•• 2D model v 2D model v ččasovasov éé oblastioblasti
•• KomplexnKomplexn íí 3D model3D model
•• AktivnAktivn íí modelymodely
•• DeformovatelnDeformovateln éé modelymodely
•• Vývoj geometrickVývoj geometrick éého modeluho modelu
•• VýpoVýpo ččetnetn íí ssííťť
•• MateriMateri áálovlov éé parametryparametry
•• ŠŠkkáálovlov áánníí modelu modelu ččlovlov ěěkaka
•• Aplikace v dopravAplikace v doprav ěě

MOTIVACEMOTIVACE
ModernModern íí matematickmatematick éé metody umometody umo žňžňujuj íí rozsrozs ááhlouhlouanalýzu technických problanalýzu technických probl éémmůů numerickou cestounumerickou cestou
Kombinace výpoKombinace výpo ččtu a experimentu tu a experimentu ššetetřříí nnááklady aklady avytvvytv áářříí optimoptim áálnln íí cestu pcestu p řři vývoji nových výrobki vývoji nových výrobk ůů ––virtuvirtu áálnln íí prototypingprototyping
HMI = Human Machine Interaction HMI = Human Machine Interaction –– nutnost adekvnutnost adekv áátntn ííhohobiomechanickbiomechanick éého modelu ho modelu ččlovlov ěěkaka
RRůůznznéé stupnstupn ěě zjednoduzjednodu ššeneníí pro rpro r ůůznznéé aplikace aplikace –– ne vne v žždydyje tje t řřeba meba m íít t ččasovasov ěě nnáároroččný modelný model

Vývoj a validace s dVývoj a validace s d ůůrazem na aplikacerazem na aplikace
Metody mechaniky vMetody mechaniky v áázaných systzaných syst éémmůů
Metoda koneMetoda kone ččných prvkných prvk ůů
Jednoduchý model na bJednoduchý model na b áázi tuhých tzi tuhých t ěělesles
Deformovatelný model vybraných Deformovatelný model vybraných ččáástst íí
AktivnAktivn íí a pasivna pasivn íí modelmodel
ÚÚzkzkáá spoluprspolupr ááce s ESI Groupce s ESI Group
VyuVyu žžitit íí komerkomer ččnníího výpoho výpo ččtovtov éého prostho prost řřededíí PAMPAM

VERTIKVERTIKÁÁLNLNÍÍ 1D MODEL1D MODEL
AbsolutnAbsolutn íí a relativna relativn íívýchylkavýchylka
Energetický pEnergetický p řříístupstup
Lagrangeovy rovniceLagrangeovy rovnice
FrekvenFrekven ččnníí oblast;oblast;
∑=
=n
iiip zmE
12
1∑
=
=n
iiik zmE
1
2
2
1ɺ
rst
a z zzz += 0
( )tttt fKqqBqM =++ )()()( ɺɺɺ
)()()( 0404 tzbtzkt ɺ+=f
( ) )()(2 ωωωω iii FQBMK =+−
Boileau P.E., Rakheja S.: WholeBoileau P.E., Rakheja S.: Whole --body verticalbody verticalbiodynamic response characteristics of thebiodynamic response characteristics of the
seated vehicle driver: Measurement andseated vehicle driver: Measurement andModelModel development, International Journaldevelopment, International Journal
ooff Industrial Ergonomics 22 (1998) 449Industrial Ergonomics 22 (1998) 449 --472 472

PPřřevod do frekvenevod do frekven ččnníí oblastioblasti
Impedance = pomImpedance = pom ěěr sr s ííly a rychlostily a rychlosti
PPřřenosenos
Identifikace parametrIdentifikace parametr ůů
( ) )()( 2 ωωωω iii PBMKQ +−=
( ) ( ) ( )( )( )ωω
ωωωω0
4044)(zi
izzbibiZ
−+=
( )( )ωωω
0
1)(z
iziT =
MNsbmkNkkgm
MNsbmkNkkgm
MNsbmkNkkgm
MNsbmkNkkgm
/2064,/90,78.12
/4585,/8.162,62.8
/4750,/183,49.28
/400,/310,31.5
444
333
222
111
===
===
===
===
Boileau P.E., Rakheja S.: WholeBoileau P.E., Rakheja S.: Whole --bodybodyvertical biodynamic responsevertical biodynamic response
characteristics of the seated vehiclecharacteristics of the seated vehicledriver: Measurement and Modeldriver: Measurement and Model
development, Internationaldevelopment, InternationalJournal Journal ooff IndustrialIndustrial
ErgonomicsErgonomics22 (1998) 44922 (1998) 449--472 472

MODEL NA BMODEL NA B ÁÁZI TUHÝCH TZI TUHÝCH TĚĚLESLES
ÚÚroverove ňň zjednoduzjednodu ššeneníí na korektnna korektn íí popis globpopis glob áálnln ííartikulaceartikulace
Z hlediska mechaniky se jednZ hlediska mechaniky se jedn áá o vo v áázaný mechanickýzaný mechanickýsystsyst éém a vyum a vyu žžíívváá poznatkpoznatk ůů o dynamice tuhých to dynamice tuhých t ěěleslesa kloubových spojena kloubových spojen íí
TuhTuh éé ttěělesoleso = hmotnost, st= hmotnost, st řředed hmotnostihmotnostia matice setrvaa matice setrva ččnostinosti
Kloubový prvekKloubový prvek = sf= sf éérický,rický,posuvný,posuvný,rotarota ččnníí,,……

JEDNODUCHÝ 2D MODELJEDNODUCHÝ 2D MODEL
VývojovVývojov éé prostprost řřededíí MATLABMATLAB
NNíízkzkáá ččasovasov áá nnáároroččnostnost výpovýpo ččtutu
ZZáákladnkladn íí kinematika a dynamika pohybu ve 2Dkinematika a dynamika pohybu ve 2D
⋮
332223
221112
111
sinsin
sinsin
sin
ϕϕϕϕ
ϕ
aaxx
aaxx
ax
−−=−−=
−=
⋮
332223
221112
111
coscos
coscos
cos
ϕϕϕϕ
ϕ
aayy
aayy
ay
++=++=
=
OtevOtev řřený ený řřetetěězec elipszec elipsUniverzUniverz áálnost algoritmulnost algoritmu

VALIDACE MODELUVALIDACE MODELU
PPáád z výd z vý ššky a jeho pky a jeho p řřííččinyiny
ZtrZtr ááta kontaktuta kontaktu
ZZáákladnkladn íí kinematika a dynamika lidskkinematika a dynamika lidsk éého tho t ěělala
PodmPodm íínky dopadunky dopadu
Experimenty na policejnExperimenty na policejn íí akademii v Prazeakademii v Praze

Model tModel t ěělalajako jednohojako jednoho
ttěělesalesa
VVáázanýzanýMechanickýMechanický
systsyst éémm
ExperimentExperiment áálnln íídatadata
(dobrovoln(dobrovoln ííci)ci)SrovnSrovn áánníí
s experimentems experimentem

KOMPLEXNKOMPLEXN ÍÍ 3D 3D MODELMODELNA BNA B ÁÁZI TUHÝCH TZI TUHÝCH TĚĚLESLES
KomerKomer ččnníí software PAMsoftware PAM
Realistický tvar (povrchRealistický tvar (povrchvvytvoytvo řřenen na zna záákladklad ěětriangulace,triangulace, databdatab áázezeViewPointViewPoint DataLabs)DataLabs)
VVššechna tuhechna tuh áá ttěělesalesaspojena pomocspojena pomoc íí vazebvazeb(kloub(kloub ůů) do glob) do glob áálnln ííhohomodelu a pmodelu a p řřidid áány vzny vz áájemnjemn éékontaktykontakty

SYSTSYSTÉÉM HYPERMESHM HYPERMESH
GrafickGrafick éé prostprost řřededíí pro pro „„ PrePre--““ i i „„ PostPost --ProcessingProcessing ““
GeometrickGeometrick éé úúpravy dat a definice vlastnostpravy dat a definice vlastnost íí

VIRTUVIRTUÁÁLNLNÍÍ VÝVOJOVVÝVOJOVÉÉ PROSTPROSTŘŘEDEDÍÍ PAMPAM
GrafickGrafick éé prostprost řřededíí zahrnujzahrnuj ííccíí zzáákladnkladn íí „„ PrePre--ProcessingProcessing ““ ,,„„ŘŘeeššiičč““ i i „„ PostPost --ProcessingProcessing ““
DrobnDrobn éé geometrickgeometrick éé úúpravy, definice materipravy, definice materi áálovýchlovýchvlastnostvlastnost íí, po, poččááteteččnníích i okrajových podmch i okrajových podm íínekneka vna vněějjšíšího zatho zat íížženeníí
KomplexnKomplexn íí virtuvirtu áálnln ííprostprost řřededíí proprovirtuvirtu áálnln ííprototypingprototyping

MODEL NA BMODEL NA B ÁÁZI TUHÝCH TZI TUHÝCH TĚĚLESLES
Reakce modelu na vnReakce modelu na vn ěějjšíší zatzatíížženeníí
SSííla (nla (n ááraz), zpomalenraz), zpomalen íí, , ……
KontaktyKontakty
ModelModelkkontaktuontaktu
ČČasovasov áánnáároroččnostnost
Definice kontaktnDefinice kontaktn íích plochch ploch

MODEL NA BMODEL NA B ÁÁZI TUHÝCH TZI TUHÝCH TĚĚLES LES –– SHRNUTSHRNUTÍÍ
PasivnPasivn íí chovchov áánníí
Kostra a kKostra a k ůžůžeePouhý povrchový popisPouhý povrchový popis„„ Nulový model materiNulový model materi áálulu ““44 tuhých t44 tuhých t ěělesles
AnatomickAnatomick éé kloubyklouby13 ohybov13 ohybov ěě--torzntorzn ííchch14 posuvných14 posuvných18 sf18 sf éérickýchrických
FyziologickFyziologick éé kloubykloubyKlouzKlouz áánníí lopatky po hrudnlopatky po hrudn íím kom ko šši i –– kontaktkontakt
KluznKluzn éé kontaktykontakty„„ NulovNulov é“é“ prouprou žžky kky k ůžůže pro artikulacie pro artikulaci

MODEL NA BMODEL NA B ÁÁZI TUHÝCH TZI TUHÝCH TĚĚLES LES –– KOLENOKOLENO
Validace samotnValidace samotn éého kolennho kolenn íího kloubuho kloubu

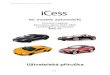
VALIDACE MODELU S HLEDISKA VALIDACE MODELU S HLEDISKA ČČELNELNÍÍHO NHO NÁÁRAZURAZU
DefinovanDefinovan éé testy zmapovantesty zmapovan éé experimentyexperimenty
ZjednoduZjednodu ššeneníí externextern íích prvkch prvk ůů
SSááňňovov áá zkouzkou šška, poka, po ččááteteččnníí rychlost, definovanrychlost, definovan éé zpomalenzpomalen íí
33--bodový pbodový p áás a 2s a 2--komorový airbagkomorový airbag
Akcelerometry v hlavAkcelerometry v hlav ěě, hrudn, hrudn ííku, pku, p áánvi, nvi, ……
0 20 40 60 80 100 120 140 160 180 2000
10
20
30
40
50
60
t [ms]
a [
g]
Head Acceleration Compared to Experiment
simulationexperiment
SrovnSrovn áánníís experimentems experimentem

VALIDACE MODELU S HLEDISKA CHODCEVALIDACE MODELU S HLEDISKA CHODCE
StStřřet s dodet s dod áávkou, srovnvkou, srovn áánníí s experimentems experimentem

∫∫∫∫∫Ω∂Ω
=Ω∂∂
dAfndx
fi
i
VNITVNITŘŘNNÍÍ ORGORGÁÁNYNY
DynamickDynamick éé vlastnosti vypovlastnosti vypo ččtenten ééna zna záákladklad ěě hustotyhustoty
GaussGauss --OstrogradskOstrogradsk éého vho v ěětata
KontaktyKontakty

JEDNODUCHÝ MODEL SVALUJEDNODUCHÝ MODEL SVALU
Deformovatelný prutový prvekDeformovatelný prutový prvekKPKP
PPPP
TPTP
PPPP
TPTP
PPPP
TPTP
ššlachalacha svalsval ššlachalacha
KPKP kontraktilnkontraktilníí prvekprvek
PPPP pasivnpasivníí prvekprvek
TPTP tlumtlumííccíí prvekprvek
length Llength Lššlacha sval lacha sval ššlachalacha
kontraktilnkontraktilníí prvekprvek KPKP
=> => aktivnaktivníí ssíílalaFFKPKP(L,v,t) = N(L,v,t) = Naa(t) F(t) Fvv(v) F(v) FLL(L)(L)
viskovisko--elastický prvekelastický prvek PPPP//TPTP=> => pasivnpasivníí ssíílalaPPP nelineP nelineáárnrníí prupružžina ina FFPPPP = = k(dL) dLk(dL) dLTPTP linelineáárnrníí tlumitlumičč FFTPTP = = b vb v
KPKP
PPPP
TPTP

0
1,5
0 2
1.51.5
1.01.0úúroveroveňň aktivace aktivace 100%100%
50%50%
25%25%
FFKPKP
FFKPKP+F+FPPPP
FFPPPP
aktivnaktivn ííččáástst
FFsvalsval /F/Fmaxmax
L/LL/L optopt
11
JEDNODUCHÝ MODEL SVALUJEDNODUCHÝ MODEL SVALU
NNááhrada prutovým prvkem hrada prutovým prvkem –– metoda konemetoda kone ččných prvkných prvk ůů
ššlachalacha
svalsval
ššlachalacha
zkrzkráácenýcený optimum optimum natanatažženýený
FFmaxmax = = σσAAststřřednedníí σσ = 0.001 GPa= 0.001 GPa
paspasivnivnííččáástst

JEDNODUCHÝ MODEL SVALU JEDNODUCHÝ MODEL SVALU –– AKTIVNAKTIVN ÍÍ MODELMODEL
VVššechny významnechny významn éé svalovsvalov éé skupinyskupiny
KaKažždý svalový snopec nahrazen prutovým prvkemdý svalový snopec nahrazen prutovým prvkem
( ) min2
1
2 →
−= ∑i
ii cf αγ
ERGONOMIEERGONOMIE –– komfortkomfort
OptimOptim áálnln íí poloha z hlediskapoloha z hlediskaminimminim áálnln íí napjatostinapjatosti
CCíílovlov ááfunkcefunkce

METODA KONEMETODA KONEČČNÝCH PRVKNÝCH PRVKŮŮ (MKP, (MKP, an.an. FEM)FEM)
MModernodern íí, vysoce efektivn, vysoce efektivn íí numericknumerick áá metodametodapro pro řřeeššeneníí technických a vtechnických a v ěědeckých deckých úúlohloh
Kontinuum rozdKontinuum rozd ěěll ííme na koneme na kone ččný poný po ččet jednotlivých et jednotlivých ččáástst íí(prvk(prvk ůů, , elementelementůů), ), ččíímmžž vznikne svznikne s ííťť ((meshmesh).).
PPosuv libovolnosuv libovoln éého vnitho vnit řřnníího bodu prvku vyjho bodu prvku vyj ááddřřííme pomocme pomoc íínnááhradnhradn íích funkcch funkc íí (apro(apro xximaimaččnníí, tvarov, tvarov éé funkce,funkce,s kompaktns kompaktn íím nosim nosi ččem) a zobecnem) a zobecn ěěných posuvných posuv ůů uzluzlůů prvkprvk ůů

PROSTOROVPROSTOROVÁÁ DISKRETIZACEDISKRETIZACE
Ve vVe vššech konfiguracech konfigurac íích kontinua, resp. u konech kontinua, resp. u kone ččných prvkných prvk ůůttěěchto konfiguracchto konfigurac íí, se aplikuj, se aplikuj íí stejnstejn éé interpolainterpola ččnníí(izoparametrick(izoparametrick éé) funkce pro vyj) funkce pro vyj ááddřřeneníí polohovpolohov éého vektoruho vektorui posuvu bodui posuvu bodu
1D, 2D a 3D prvky1D, 2D a 3D prvky
TransformaTransforma ččnníí vztahy pro pvztahy pro p řřevod funkcevod funkc íí a jejicha jejichderivacderivac íí na izoparametrický prvekna izoparametrický prvek
RovnicRovnic ee popisujpopisuj ííccíí rovnovrovnov ááhu kontinua v maticovhu kontinua v maticov éé formform ěě
pruty,pruty,nosnnosn ííkyky
trojtroj úúhelnheln ííky,ky,ččtyty řřúúhelnheln ííkyky
membrmembr áány,ny,skosko řřepinyepiny
ččtyty řřststěěny,ny,dorty, cihlydorty, cihly
úúseseččkaka

3D REKONSTRUKCE3D REKONSTRUKCE
VychVych áázzíí z z řřezezůů (CT, MRI)(CT, MRI)
Hranice jednotlivých orgHranice jednotlivých org áánnůů
Poloautomatický procesPoloautomatický proces

MKP MODELMKP MODEL
SpojenSpojen íí mměěkkých a tvrdých tkkkých a tvrdých tk áánníí
VhodnVhodn éé elementy pro MKPelementy pro MKP
Definice materiDefinice materi áálových vlastnostlových vlastnost íí
Definice vzDefinice vz áájemných vazebjemných vazeb
FyziologickFyziologick éé podmpodm íínkynky

DEFORMOVATELNÝ MODELDEFORMOVATELNÝ MODEL
TvrdTvrd éé tktk áánněě –– kostikosti•• TuhTuh áá ttěělesles•• SkoSko řřepinovepinov áá kompakta a 3D spongikompakta a 3D spongi óózaza
MMěěkkkk éé tktk áánněě•• NelineNeline áárnrn íí viskoelastický materiviskoelastický materi ááll•• Hyperelastický materiHyperelastický materi ááll•• Elastický materiElastický materi ááll
Ligamenty Ligamenty –– vváázaný kontaktzaný kontakt
VzVzáájemnjemn éé kontaktkontakt yy
PPřředpedpěětt íí svalsval ůů (aktivn(aktivn íí model)model)
Tlak v cTlak v c éévvááchch
elastickelastick áá neelastickneelastick áá ppěěnana

EXPERIMENTEXPERIMENTÁÁLLÍÍ MMĚŘĚŘENENÍÍ
EtikaEtika
ViskoelastickViskoelastick éé vlastnostivlastnosti
Ep [kPa] Es [kPa] Ŋ [kPa s]
Liver (n=7) 124.1 ± 11.9 3459.9 ± 1566.9 779.4 ± 199.6
Spleen (n=2) 5476.1 3029796.9 16969.7
Critical tension [kPa]
Liver 175.9
Spleen 119

BIOBAGBIOBAG
PPřřevod stavovevod stavov éé rovnice plynu na kapalinurovnice plynu na kapalinu
HookeHooke ůův zv záákon pro pevnkon pro pevn éé lláátkytky
KapalinyKapaliny
0RTp ρ=
0000
00000 1
ρρρ
ρρρρ ∆+=
−+= RTpRTRTp
0000 ρ
ρρ ∆=− RTpp ⇒0
00 ρρρ ∆=∆ RTp
⇒
( ) 00213 V
VK
V
VEp
∆−=∆−
−=ν
00 V
VKpp
∆−=0
0 V
VKpp
∆−=−⇒ ⇒0V
VKp
∆−=∆

VVmVVVVm ρρρρρρ ∆+∆+≈∆∆+∆+∆+= 00000
( )( )VVVVm ∆+∆+=== 000 ρρρρ
⇒ 000 =∆+∆ VV ρρ ⇒ ρρ∆−=∆
0V
V
0ρρ∆=∆ Kp
000 ρ
ρρ ∆=∆ RTp
00T
KR
ρ=
V
p
c
c=κ
BIOBAGBIOBAG
ZZáákon zachovkon zachov áánníí hmotyhmoty
PlynPlyn KapalinaKapalina

VALIDACE MODELUVALIDACE MODELU
StandardnStandardn íí testytesty
NNíízkzkéé zzááttěžěže e –– dobrovolndobrovoln íícici
VysokVysok éé zzááttěžěže e –– mrtvmrtv áá ttěělala
EtikaEtika
ExperimentExperiment áálnln íí koridorykoridory
KroellKroell ůův test v test –– impaktorimpaktordandan éé hmotnosti a rychlostihmotnosti a rychlosti(energie) nar(energie) nar áážžíí do dando dan ééoblasti lidskoblasti lidsk éého tho t ěěla, mla, měřěřííse deformace, sse deformace, s ííla, la, ……
ČČelneln íí testtest

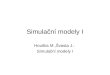
VALIDACE MODELUVALIDACE MODELU
INRETS test INRETS test –– impaktorem je 23.4 kg timpaktorem je 23.4 kg t ěžěžkkáá deskadeskao rozmo rozm ěěrech 200 x 100 mm prech 200 x 100 mm p řředepsanou rychlostedepsanou rychlost íí
0 2 4 6 8 10 12 14 16 18 20-120
-100
-80
-60
-40
-20
0Sacrum Acceleration - High Speed
t [ms]
a [
g]
lower corridorupper corridorvariant 1 variant 2 variant 3 variant 4
0 2 4 6 8 10 12 14 16 18 200
5
10
15Contact Force - High Speed
t [ms]
F [
kN
]
lower corridorupper corridorvariant 1 variant 2 variant 3 variant 4

VALIDACE MODELUVALIDACE MODELU
Test podle VianaTest podle Viana
BoBoččnníí testtest
Impaktorem je tuhýImpaktorem je tuhývváálec hmotnostilec hmotnosti23.4 kg a polom23.4 kg a polom ěěruruprprůřůřezu 150 mmezu 150 mm 0 2 4 6 8 10 12 14 16 18 20
0
1
2
3
4
5
6
7
8Contact Force - Low Speed
t [ms]
F [
kN
]
lower corridorupper corridorsimulation

VALIDACE MODELUVALIDACE MODELU
Test podle CavanaughaTest podle Cavanaugha
ČČelneln íí test test –– volantvolant
Impaktorem je tuhImpaktorem je tuh áá tytyčč o hmotnostio hmotnosti48 kg a polom48 kg a polom ěěruru prprůřůřezu 25 mmezu 25 mm
0 ms0 ms 20 ms20 ms 40 ms40 ms 60 ms60 ms

TTĚĚHOTNHOTNÁÁ ŽŽENAENA
Zranitelný Zranitelný úúččastnastn íík dopravyk dopravy30. 30. týden ttýden t ěěhotenstvhotenstv íí
Analýza Analýza úúččinku stinku st áávajvaj ííccíích bezpech bezpe ččnostnnostn íích prvkch prvk ůůVývoj a optimalizaceVývoj a optimalizace

VALIDACE MODELUVALIDACE MODELU
ČČelneln íí test podle Cavanaughatest podle Cavanaugha
BoBoččnníí test podle INRETStest podle INRETS

ŠŠKKÁÁLOVLOVÁÁNNÍÍ MODELMODELŮŮ LIDSKLIDSK ÉÉHO THO TĚĚLALA
TuhTuh éé nebo deformovatelnnebo deformovateln éé
CelCeléé modely nebo modely modely nebo modely ččáástst íí
Modely pro speciModely pro speci áálnln íí úúččelyely
PasivnPasivn íí a aktivna aktivn íí modelymodely
Modely pro legislativuModely pro legislativu

MOTIVACEMOTIVACE
5%5%--nníí, 50%, 50%--nníí a 95%a 95%--nníí velikostivelikosti
KaKažždý jsme jinýdý jsme jiný
BiologickBiologick áá rozmanitost lidskrozmanitost lidsk éého tho t ěělala
PohlavPohlav íí, rasa, geografick, rasa, geografick éé podmpodm íínky, posilovnky, posilov áánníí atd.atd.
ŠŠkkáálovlov áánníí a morfova morfov áánníí referenreferen ččnníího modeluho modelu
•• ŠŠkkáálovlov áánníí = glob= glob áálnln íí rozmrozm ěěry a matry a mat eeriri áálovlov éé vlastnosti apod.vlastnosti apod.
•• MorfovMorfov áánníí = detaily (nap= detaily (nap řř. rysy nebo patologick. rysy nebo patologick éé zmzměěny apod.ny apod.

RREEŠŠERERŠŠEE
PopulaPopula ččnníí skupinyskupiny
Vliv chovVliv chov áánníí ččlovlov ěěka a pka a p řříírodnrodn íí vlivyvlivy
Izolace a adaptace k urIzolace a adaptace k ur ččitit éému mu úúzemzemíí
OvlivnOvlivn íí i vývoj populace do budoucnai vývoj populace do budoucna
MMííry lidskry lidsk éé rozmanitostirozmanitosti
Statistika, interpretace Statistika, interpretace ”” prprůůmměěrnrn éého ho ččlovlov ěěkaka””
VýVýšška, hmotnost, formaka, hmotnost, forma

AANTROPOMETRIENTROPOMETRIE
VýVýšškaka•• NormNorm áálnln íí mezi 1.4 m a 2 mmezi 1.4 m a 2 m•• Výjimky existujVýjimky existuj íí•• VyVyššíšší lidlid éé ddáále od rovnle od rovn ííkuku
HmotnostHmotnost•• NormNorm áálnln íí mezi 30 kg a 100 kgmezi 30 kg a 100 kg
EtnickEtnick éé rozdrozd íílyly•• ŽŽeny kmene Khoi a San nebo !Kung v jieny kmene Khoi a San nebo !Kung v ji žžnníí AfriceAfrice•• TTěžěžšíší lidlid éé v chladnv chladn ěějjšíším klimatum klimatu
FormaForma•• PomPoměěr stojr stoj ííccíí a seda sed ííccíí vývý ššky (cormic index)ky (cormic index)•• PomPoměěr dr d éélky trupu k dlky trupu k d éélce tlce t ěělala•• KratKrat šíší ttěělo + dello + del šíší nohy < 50nohy < 50

DDEFINICE ROZMEFINICE ROZMĚĚRRŮŮ
BODY MASS INDEXBODY MASS INDEX
heightbodyheightbody
massbodyBMI
⋅=

SSHRNUTHRNUTÍÍ
Vybrat mnoVybrat mno žžinu antropometrických parametrinu antropometrických parametr ůů
Definovat cDefinovat c íílovou skupinu lidlovou skupinu lid íí
NajNajíít vhodnt vhodn áá antropometrickantropometrick áá data jako funkcidata jako funkcinněějakjak éého parametruho parametru
Vyvinout algoritmus Vyvinout algoritmus šškkáálovlov áánníí antropometrickýchantropometrickýchdat jako funkci parametrudat jako funkci parametru

CCÍÍLOVLOVÁÁ SKUPINASKUPINA
ČČeskoslovenskeskoslovensk áá spartakispartaki ááda 1985da 1985 + dal+ dal šíší mměřěřeneníí
13000 mu13000 mu žůžů a a žženen
JedineJedine ččnnáá mnomno žžina lidina lid íí od od 00 do do 775 let5 let
InterpolaceInterpolace
Parametry Parametry –– vvěěk a pohlavk a pohlav íí
DDěěti ti –– nutnnutn éé morfovmorfov áánníí

REFGERENREFGERENČČNNÍÍ MODELYMODELY
Na zNa záákladklad ěě spoluprspolupr ááce sce s
Rodina modelRodina model ůů ROBBYROBBY
ROBBY2 50% male HARB modelROBBY2 50% male HARB model
ROBINA 5% female HARB modelROBINA 5% female HARB model
Výhody a nevýhodyVýhody a nevýhody
Segmentace tSegmentace t ěělala
DeformovatelnDeformovateln éé modelymodely

ROBBY2ROBBY2
Hmotnost = 76.59 kgHmotnost = 76.59 kg
StojStoj ííccíí vývý šška = 178.72 cmka = 178.72 cm
SedSedííccíí vývý šška 98.44 cmka 98.44 cm
BMI = 24BMI = 24

ROBINAROBINA
Hmotnost = 48.22 kgHmotnost = 48.22 kg
StojStoj ííccíí vývý šška = 141.71 cmka = 141.71 cm
SedSedííccíí vývý šška 76.75 cmka 76.75 cm
BMI = 24BMI = 24

BOBBYBOBBY
Hmotnost = Hmotnost = 2424 kgkg
StojStoj ííccíí vývý šška = 1ka = 11212..8787 cmcm
SedSedííccíí vývý šška ka 6464..665 cm5 cm
BMI = BMI = 1919

SEGMENTACESEGMENTACE
Hlava a krkHlava a krk
HrudnHrudn ííkk
AbdomenAbdomen
PPáánevnev
PaPažžee
PPřředloktedlokt íí
DlaDlaňň
StehnoStehno
LýtkoLýtko
ChodidloChodidlo

AALGLGOORITMUSRITMUS
1. 1. ŠŠkkáálovlov áánníí vvššechechsegmentsegment ůů v globv glob áálnln íímmsousou řřadnicovadnicov éémmsystsyst éémumu
2. P2. Přřepoepoččet hmotnosti aet hmotnosti amatice setrvamatice setrva ččnostinosti
3. Spojen3. Spojen íí modelumodelu
4. Pozice modelu4. Pozice modelu

EVOLUCEEVOLUCE
Algoritmus Algoritmus šškkáálovlov áánníímmuužžee a a žženyenyČČeskoslovenskeskoslovensk éépopulace z roku 1985populace z roku 1985v rozmezv rozmez ííod 5 do 55 letod 5 do 55 let
Software proSoftware prošškkáálovlov áánníízzáákladnkladn ííhohomodelumodelu

VVALIDACEALIDACE
UniverzitaUniverzita v Heidelberguv Heidelbergu
1313--ti letý chlapecti letý chlapec
SSááňňovov áá zkouzkou šškaka
33--bodový pbodový p áás a airbags a airbag
PoPoččááteteččnníí rychlostrychlost = = 41 km/h41 km/h
PPřředepsanedepsan éé zpomalenzpomalen íí
Akcelerometry aAkcelerometry a silovsilov éé senzorysenzory

ANALANAL ÝZA VÝSLEDKÝZA VÝSLEDKŮŮ

ReReáálnln éé ppřříípadypadyzzaloalo žženenéé nanadatabdatab áázzííchch
ATD ATD sedsed ííccíív kokpitu letadlav kokpitu letadla
POPIS PORANPOPIS PORANĚĚNNÍÍ
KritKrit éérium poranrium poran ěěnníí aorty (saorty (s ííla, tlak, prodloula, tlak, prodlou žženeníí))
Studium poranStudium poran ěěnníí aorty baorty b ěěhem kritickhem kritick éého pho p řřistist áánníí nebonebo„„ ppáádudu ““ letadla (vrtulnletadla (vrtuln ííku)ku)
VyuVyu žžitit íí normovannormovan éého ATD mho ATD m íísto modelu sto modelu ččlovlov ěěkaka
SpoluprSpolupr ááce s AMSAFE (USA)ce s AMSAFE (USA)

PODPORA VÝVOJE SEDAPODPORA VÝVOJE SEDAČČKY KLUZKY KLUZ ÁÁKUKU
KritickKritick éé ppřřistist áánníí kluzkluz áákuku –– pravidlapravidla FARFAR
„„ Nosnost sedaNosnost seda ččkyky ““ bběěhem nhem n áárazurazu

OCHRANA CHODCOCHRANA CHODCŮŮ
Optimalizace kapoty automobilu, pasivnOptimalizace kapoty automobilu, pasivn íí a aktivna aktivn íí prvkyprvky
KorektnKorektn íí biomechanický model kolenebiomechanický model kolene
ČČas = 0 msas = 0 ms 50 ms50 ms 100 ms100 ms 250 ms250 ms

OCHRANA CHODCE VOCHRANA CHODCE VŮČŮČI TRAMVAJII TRAMVAJI
CDV identifikovalo 3 scCDV identifikovalo 3 sc éénnáářře nehodye nehody
Chodec pChodec p řřechech áázejzejííccíí (p(přřebebííhajhaj ííccíí))ppřřed tramvajed tramvaj íí
AktivnAktivn íí chodecchodec
Analýza rizika poranAnalýza rizika poran ěěnníí ppřři i primprim áárnrn íím nm n áárazurazu

POPIS NEHODY AUTOMOBILUPOPIS NEHODY AUTOMOBILU
PPřříímý popis poranmý popis poran ěěnníí jako demonstrjako demonstr áátortor

OCHRANA OCHRANA ŘŘIDIIDIČČE A CESTUJE A CESTUJ ÍÍCCÍÍCH V TRAMVAJICH V TRAMVAJIOsazenOsazen íí modelu kolejovmodelu kolejov éého vozidla ho vozidla řřidiidi ččem a pasaem a pasa žžééryry
Analýza vlivu nAnalýza vlivu n ááraznrazn ííku (geometrie, materiku (geometrie, materi áál)l)
VyhodnocenVyhodnocen íí zrychlenzrychlen íí na sedadlena sedadle
VyhodnocenVyhodnocen íí kritkrit éériri íí poranporan ěěnníí
NNáávrhy na zlepvrhy na zlep ššeneníí bezpebezpeččnostinosti