Embed Size (px)
Citation preview
1
Bayesian image modeling by
generalized sparse Markov random
fields and loopy belief propagation Kazuyuki Tanaka
Graduate School of Information Sciences (GSIS),
Tohoku University, Sendai, Japan
http://www.smapip.is.tohoku.ac.jp/~kazu/
Collaborators
Muneki Yasuda (GSIS, Tohoku University, Japan)
D. Michael Titterington (University of Glasgow, UK)
12 June, 2012 Interdisciplinary Workshop on Inference 2012
(Paris)
2
Outline
1. Introduction
2. Bayesian Image Modeling by Generalized Sparse Prior
3. Noise Reductions by Generalized Sparse Prior
4. Expansions to Segmentations
5. Concluding Remarks
12 June, 2012 Interdisciplinary Workshop on Inference 2012
(Paris)
3
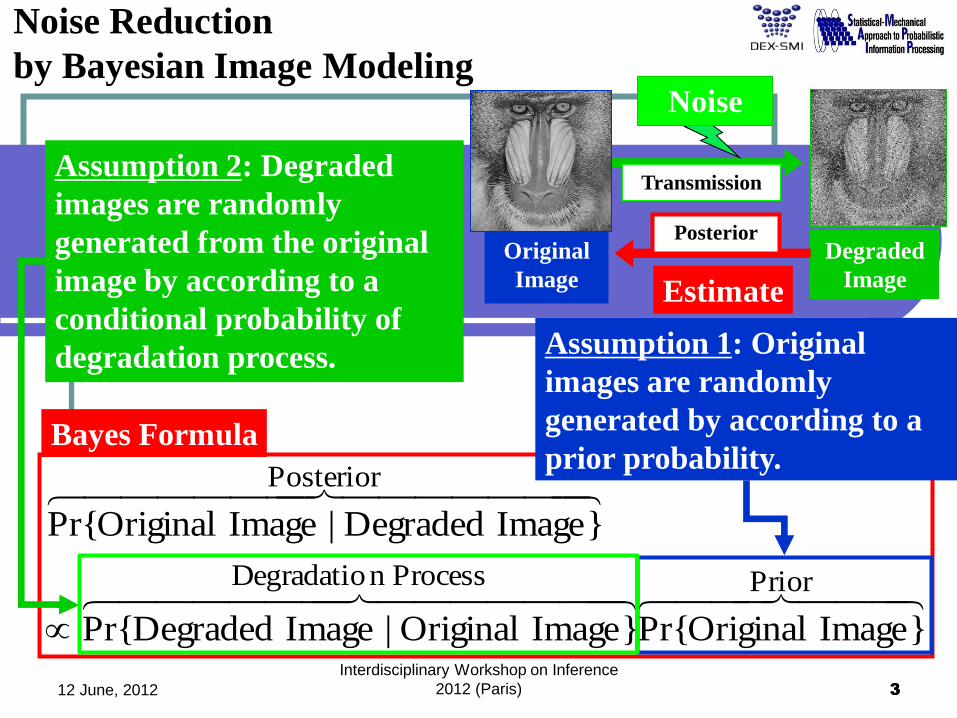
Noise Reduction
by Bayesian Image Modeling
PriorProcessn Degradatio
Posterior
}Image OriginalPr{}Image Original|Image DegradedPr{
}Image Degraded|Image OriginalPr{
Assumption 1: Original
images are randomly
generated by according to a
prior probability. Bayes Formula
Original
Image
Degraded
Image
Transmission
Noise
Estimate
Posterior
3
Assumption 2: Degraded
images are randomly
generated from the original
image by according to a
conditional probability of
degradation process.
12 June, 2012
Interdisciplinary Workshop on Inference
2012 (Paris)
4
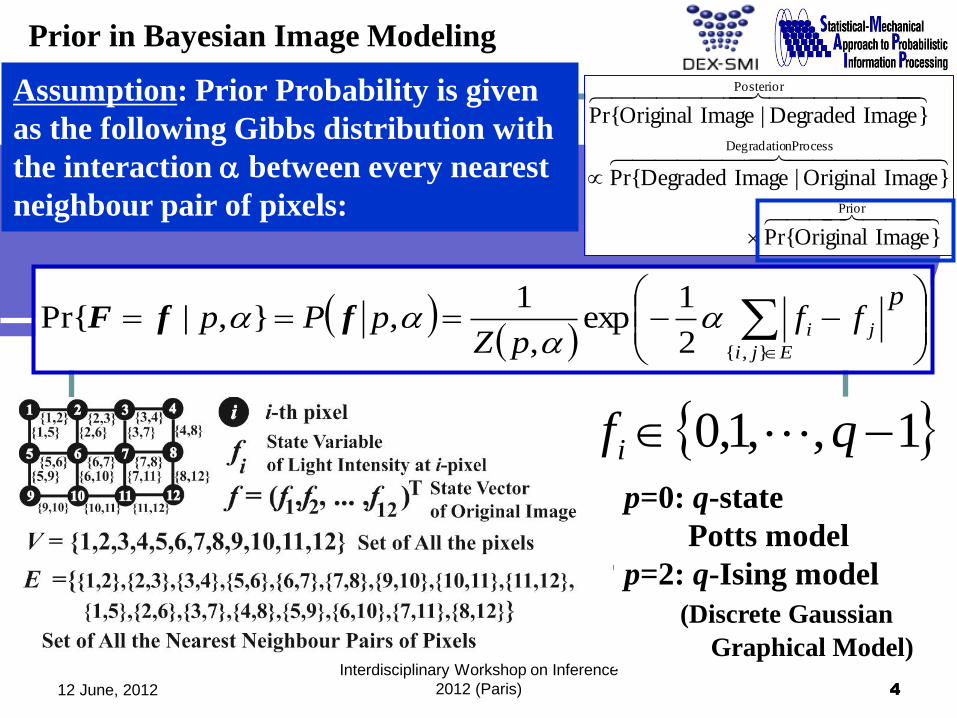
Prior in Bayesian Image Modeling
Assumption: Prior Probability is given
as the following Gibbs distribution with
the interaction a between every nearest
neighbour pair of pixels:
Prior
ProcessnDegradatio
Posterior
}Image OriginalPr{
}Image Original|Image DegradedPr{
}Image Degraded|Image OriginalPr{
4
Eji
ji
pff
pZpPp
},{2
1exp
,
1,},|Pr{ a
aaa ffF
12 June, 2012
Interdisciplinary Workshop on Inference
2012 (Paris)
p=0: q-state
Potts model
p=2: q-Ising model
(Discrete Gaussian
Graphical Model)
1,,1,0 qfi
5
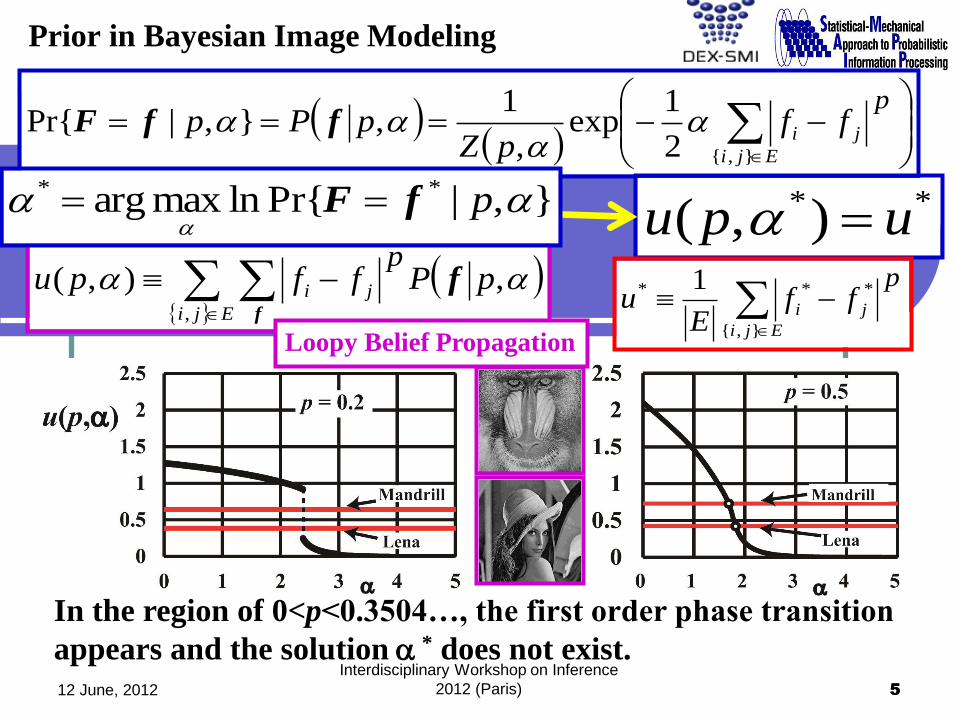
Prior in Bayesian Image Modeling
5
Eji
ji
pff
pZpPp
},{2
1exp
,
1,},|Pr{ a
aaa ffF
**),( upu a
Eji
ji
pff
Eu
},{
*** 1
In the region of 0<p<0.3504…, the first order phase transition
appears and the solution a * does not exist.
Eji
ji pPffpup
,
,),(f
f aa
12 June, 2012
Interdisciplinary Workshop on Inference
2012 (Paris)
Loopy Belief Propagation
},|Pr{lnmaxarg ** aaa
pfF
6
Outline
1. Introduction
2. Bayesian Image Modeling by Generalized Sparse Prior in Noise Reductions
3. Noise Reduction Procedure by Generalized Sparse Prior
4. Expansions to Segmentations
5. Concluding Remarks
12 June, 2012 Interdisciplinary Workshop on Inference 2012
(Paris)
7
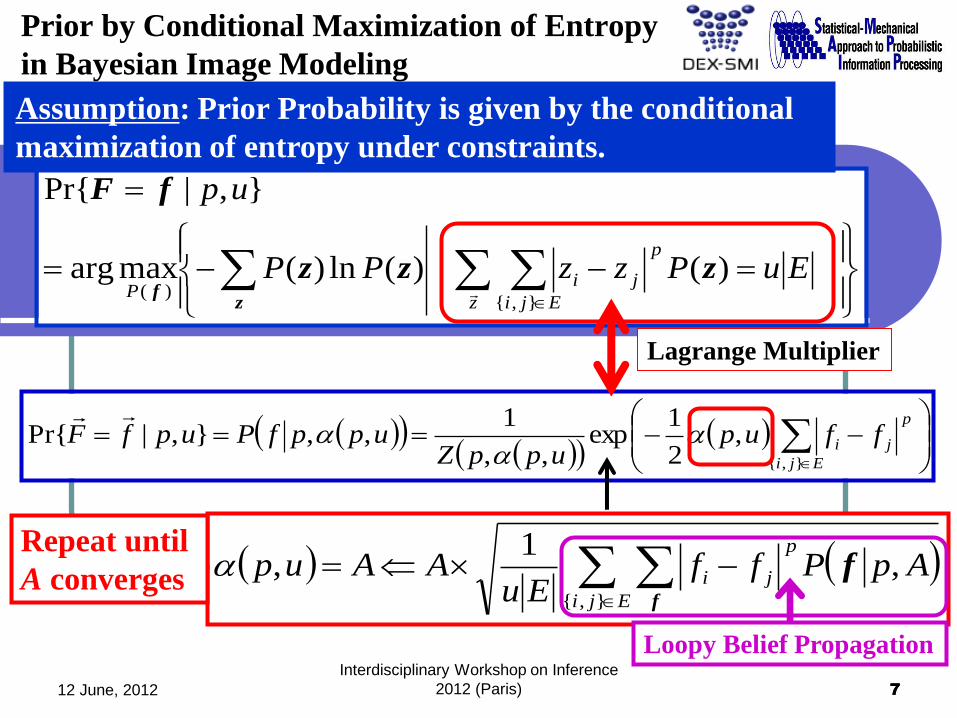
Prior by Conditional Maximization of Entropy
in Bayesian Image Modeling
)( )(ln)(maxarg
},|Pr{
},{)(
z Eji
p
jiP
EuPzzPP
up
zzz
fF
zf
7
Eji
p
ji ffupuppZ
uppfPupfF},{
,2
1exp
,,
1,,},|Pr{ a
aa
Lagrange Multiplier
Eji
p
ji ApPffEu
AAup},{
,1
,f
faRepeat until
A converges
Loopy Belief Propagation
Assumption: Prior Probability is given by the conditional
maximization of entropy under constraints.
12 June, 2012
Interdisciplinary Workshop on Inference
2012 (Paris)
8
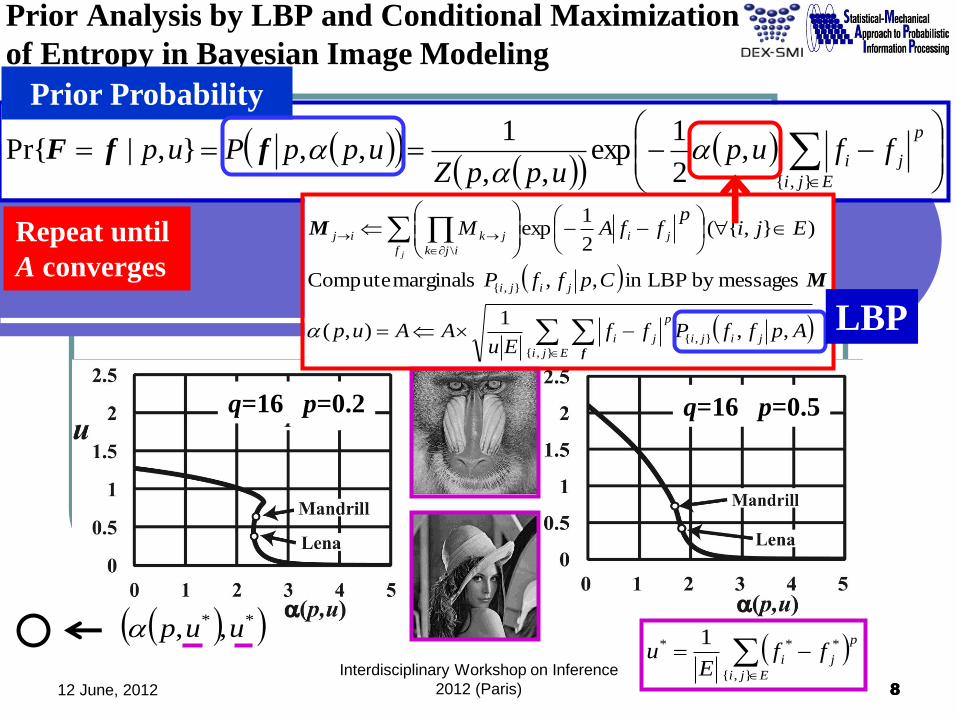
Prior Analysis by LBP and Conditional Maximization
of Entropy in Bayesian Image Modeling
8
Eji
p
ji ffupuppZ
uppPup},{
,2
1exp
,,
1,,},|Pr{ a
aaffF
** ,, uupa
Eji
jiji
p
ji
jiji
f
ji
ijk
jkij
ApffPffEu
AAup
CpffP
EjiffAMj
p
},{
},{
},{
\
,,1
),(
messagesby LBPin ,, marginals Compute
)},{( 2
1exp
f
M
M
a
Prior Probability
q=16 p=0.2 q=16 p=0.5
Eji
p
ji ffE
u},{
*** 1
Repeat until
A converges
12 June, 2012
Interdisciplinary Workshop on Inference
2012 (Paris)
LBP
9
Prior in Bayesian Image Modeling
9
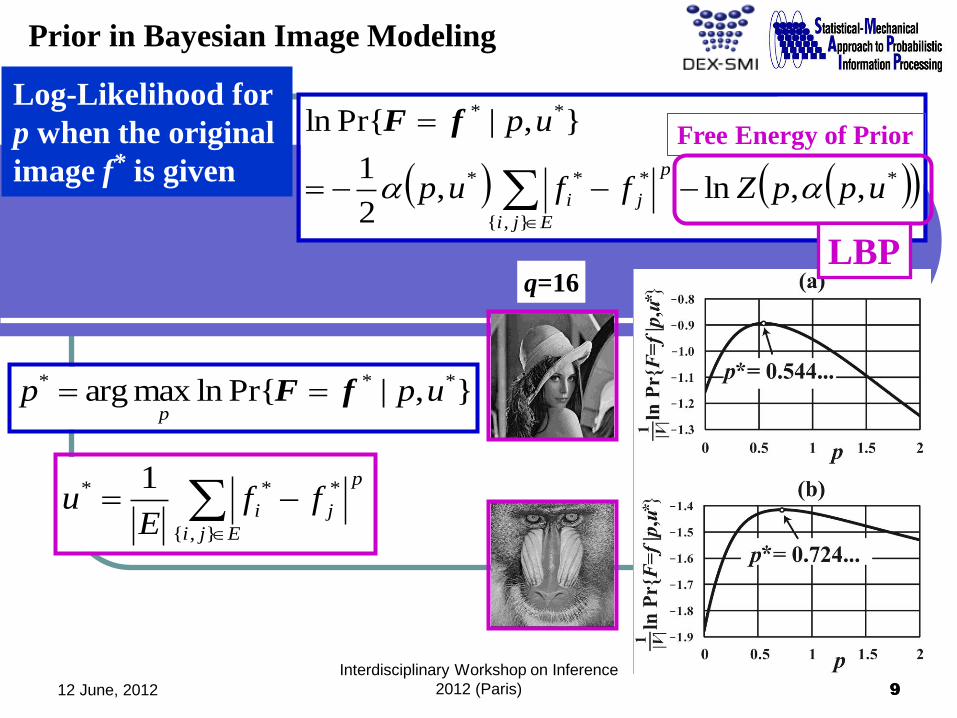
Log-Likelihood for
p when the original
image f* is given
Eji
p
ji ffE
u},{
*** 1
*
},{
***
**
,,ln,2
1
},|Pr{ln
uppZffup
up
Eji
p
ji aa
fF
q=16
},|Pr{lnmaxarg *** uppp
fF
12 June, 2012
Interdisciplinary Workshop on Inference
2012 (Paris)
LBP
Free Energy of Prior
10
Outline
1. Introduction
2. Bayesian Image Modeling by Generalized Sparse Prior
3. Noise Reductions by Generalized Sparse Prior
4. Expansions to Segmentations
5. Concluding Remarks
12 June, 2012 Interdisciplinary Workshop on Inference 2012
(Paris)
11
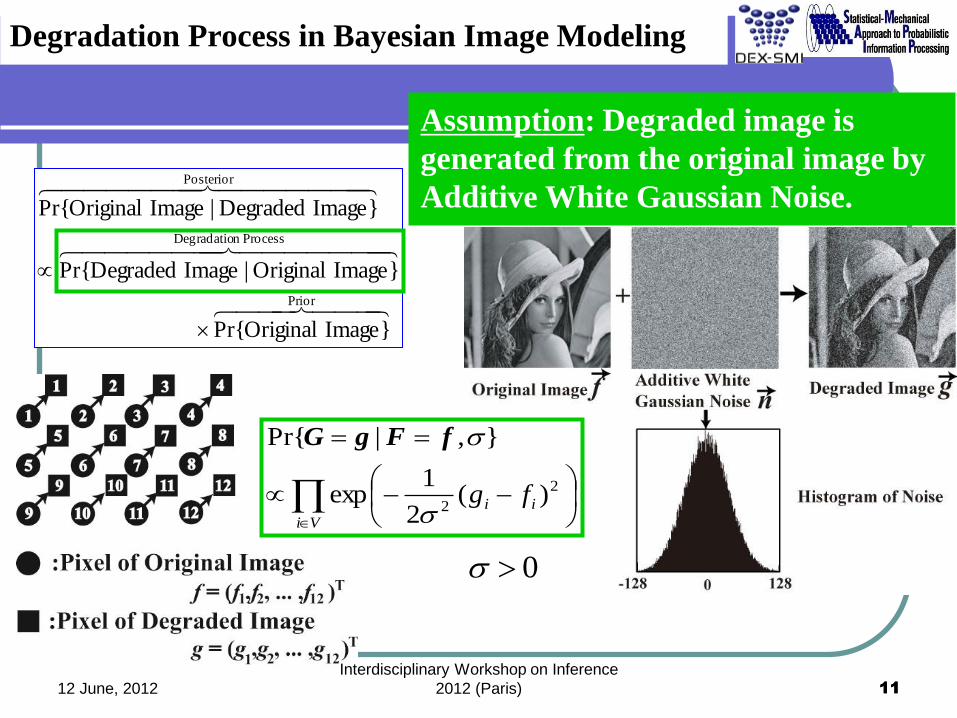
Degradation Process in Bayesian Image Modeling
Assumption: Degraded image is
generated from the original image by
Additive White Gaussian Noise.
Prior
Processn Degradatio
Posterior
}Image OriginalPr{
}Image Original|Image DegradedPr{
}Image Degraded|Image OriginalPr{
0
11
Vi
ii fg 2
2)(
2
1exp
},|Pr{
fFgG
12 June, 2012
Interdisciplinary Workshop on Inference
2012 (Paris)
12
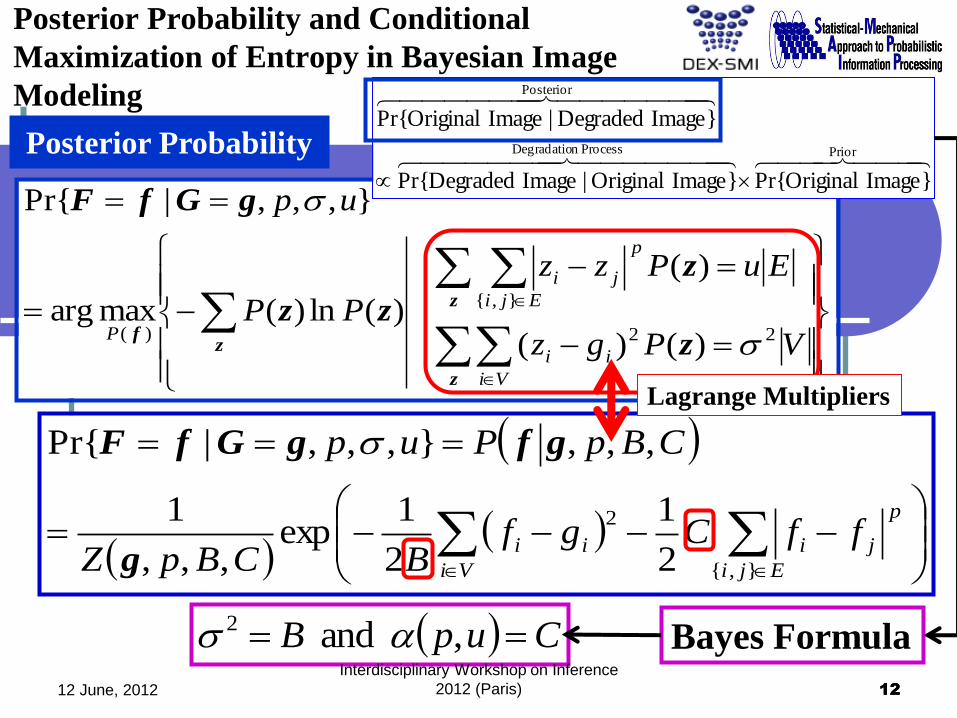
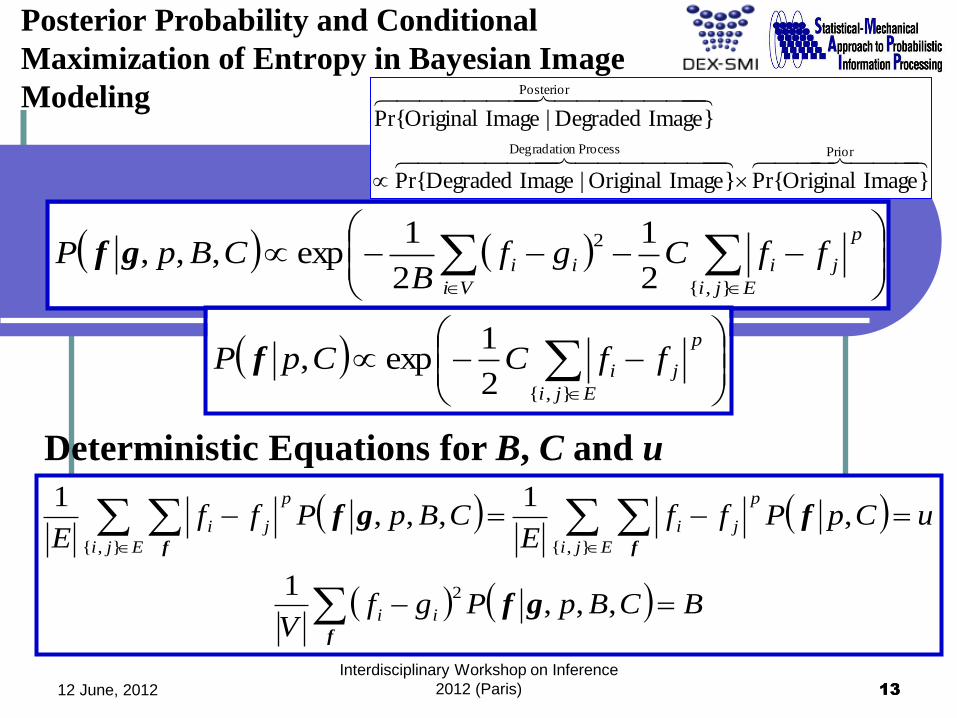
Posterior Probability and Conditional
Maximization of Entropy in Bayesian Image
Modeling
z
z
zf
z
z
zz
gGfF
Vi
ii
Eji
p
ji
PVPgz
EuPzz
PP
up
22
},{
)()()(
)(
)(ln)(maxarg
},,,|Pr{
Posterior Probability
PriorProcessn Degradatio
Posterior
}Image OriginalPr{}Image Original|Image DegradedPr{
}Image Degraded|Image OriginalPr{
12
Eji
p
ji
Vi
ii ffCgfBCBpZ
CBpPup
},{
2
2
1
2
1exp
,,,
1
,,,},,,|Pr{
g
gfgGfF
Lagrange Multipliers
CupB , and 2 a Bayes Formula
12 June, 2012
Interdisciplinary Workshop on Inference
2012 (Paris)
13
Posterior Probability and Conditional
Maximization of Entropy in Bayesian Image
Modeling
PriorProcessn Degradatio
Posterior
}Image OriginalPr{}Image Original|Image DegradedPr{
}Image Degraded|Image OriginalPr{
13
Eji
p
ji
Vi
ii ffCgfB
CBpP},{
2
2
1
2
1exp,,,gf
Eji
p
ji ffCCpP},{2
1exp,f
BCBpPgfV
uCpPffE
CBpPffE
ii
Eji
p
ji
Eji
p
ji
f
ff
gf
fgf
,,,1
,1
,,,1
2
},{},{
Deterministic Equations for B, C and u
12 June, 2012
Interdisciplinary Workshop on Inference
2012 (Paris)
14
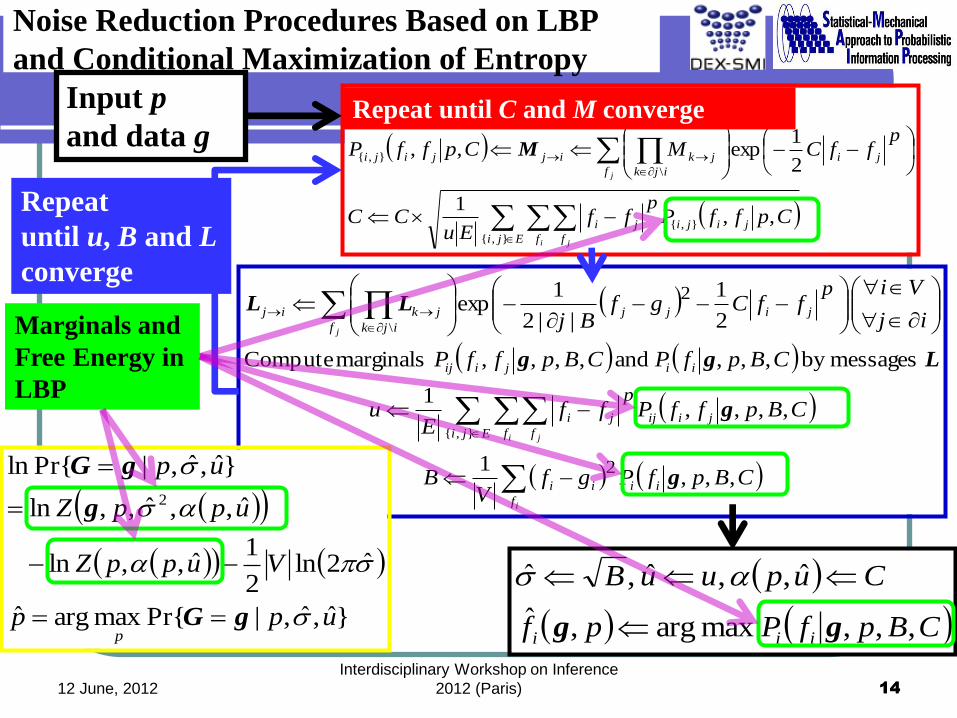
Noise Reduction Procedures Based on LBP
and Conditional Maximization of Entropy
14
Repeat until C converge
Eji f f
jijiji
f
ji
ijk
jkijjiji
i j
j
CpffPffEu
CC
ffCMCpffP
C
p
p
},{
},{
\
},{
,,1
2
1exp,,
converges untilRepeat
M
i
i j
j
f
iiii
Eji f f
jiijji
iijiij
f
jijj
ijk
jkij
CBpfPgfV
B
CBpffPffE
u
CBpfPCBpffP
ij
ViffCgf
Bj
p
p
,,,1
,,,,1
messagesby ,,, and ,,,, marginals Compute
2
1
||2
1exp
2
2
},{
\
g
g
Lgg
LL
Repeat
until u, B and L
converge
CBpfPpf
CupuuB
iii ,,,maxarg,ˆ
ˆ, ,ˆ ,ˆ
gg
a
12 June, 2012
Interdisciplinary Workshop on Inference
2012 (Paris)
}ˆ,ˆ,|Pr{maxargˆ
ˆ2ln2
1ˆ,,ln
ˆ,,ˆ,,ln
}ˆ,ˆ,|Pr{ln
2
upp
VuppZ
uppZ
up
p
a
a
gG
g
gG
Marginals and
Free Energy in
LBP
Repeat until C and M converge Input p
and data g
15
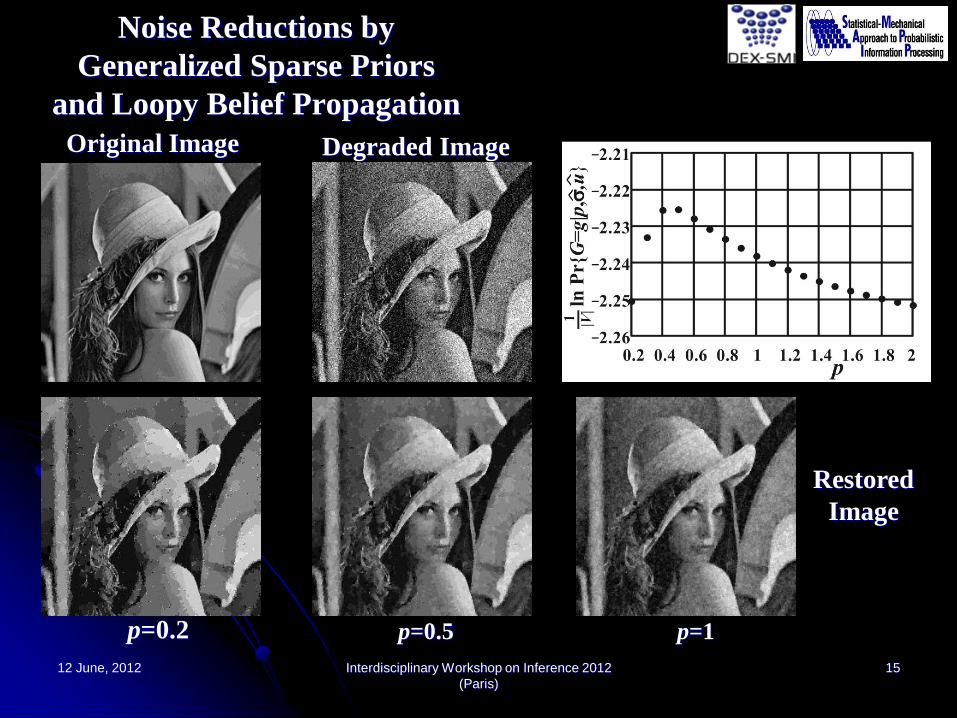
Noise Reductions by
Generalized Sparse Priors
and Loopy Belief Propagation
p=0.5 p=0.2
Original Image Degraded Image
Restored
Image
p=1
12 June, 2012 Interdisciplinary Workshop on Inference 2012
(Paris)
16
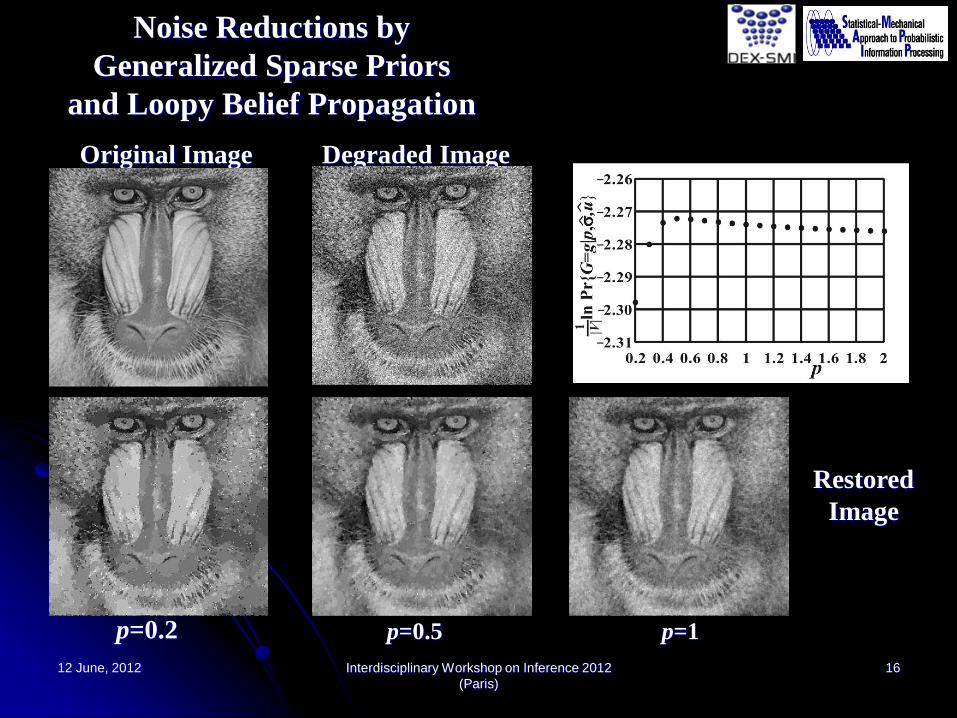
Noise Reductions by
Generalized Sparse Priors
and Loopy Belief Propagation
p=0.5 p=0.2
Original Image Degraded Image
Restored
Image
p=1
12 June, 2012 Interdisciplinary Workshop on Inference 2012
(Paris)
17
Outline
1. Introduction
2. Bayesian Image Modeling by Generalized Sparse Prior
3. Noise Reductions by Generalized Sparse Prior
4. Expansions to Segmentations
5. Concluding Remarks
12 June, 2012 Interdisciplinary Workshop on Inference 2012
(Paris)
18
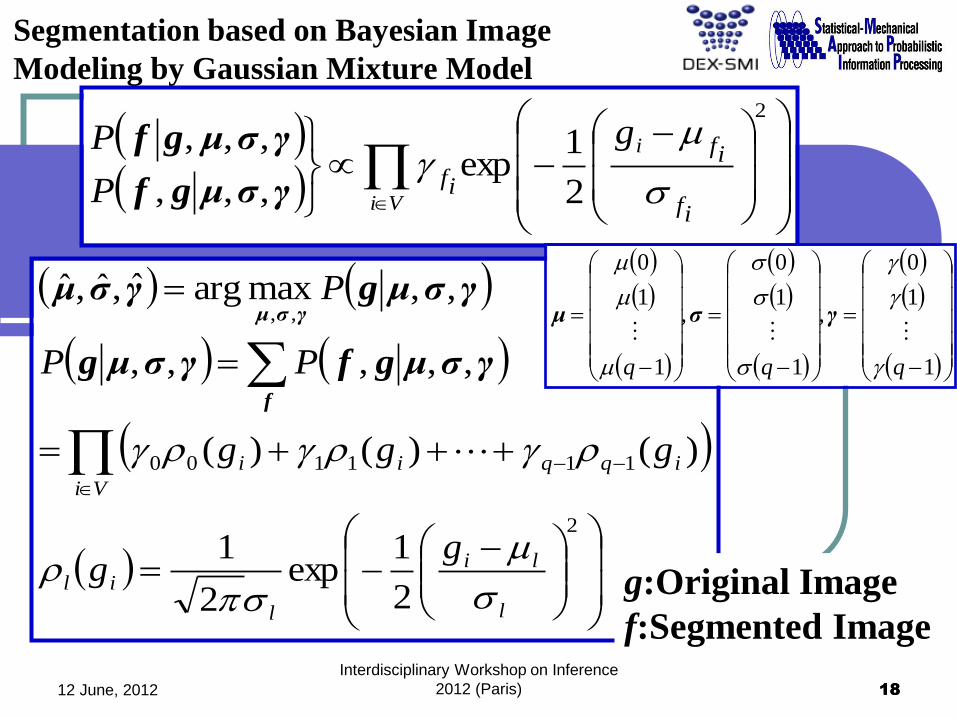
Segmentation based on Bayesian Image
Modeling by Gaussian Mixture Model
18
Vi
i
if
if
if
g
P
P2
2
1exp
,,,
,,,
γσμgf
γσμgf
12 June, 2012
Interdisciplinary Workshop on Inference
2012 (Paris)
2
111100
,,
2
1exp
2
1
)()()(
,,,,,
,,maxargˆ,ˆ,ˆ
l
li
l
il
Vi
iqqii
gg
ggg
PP
P
f
γσμ
γσμgfγσμg
γσμgγσμ
1
1
0
,
1
1
0
,
1
1
0
qqq
γσμ
g:Original Image
f:Segmented Image
19
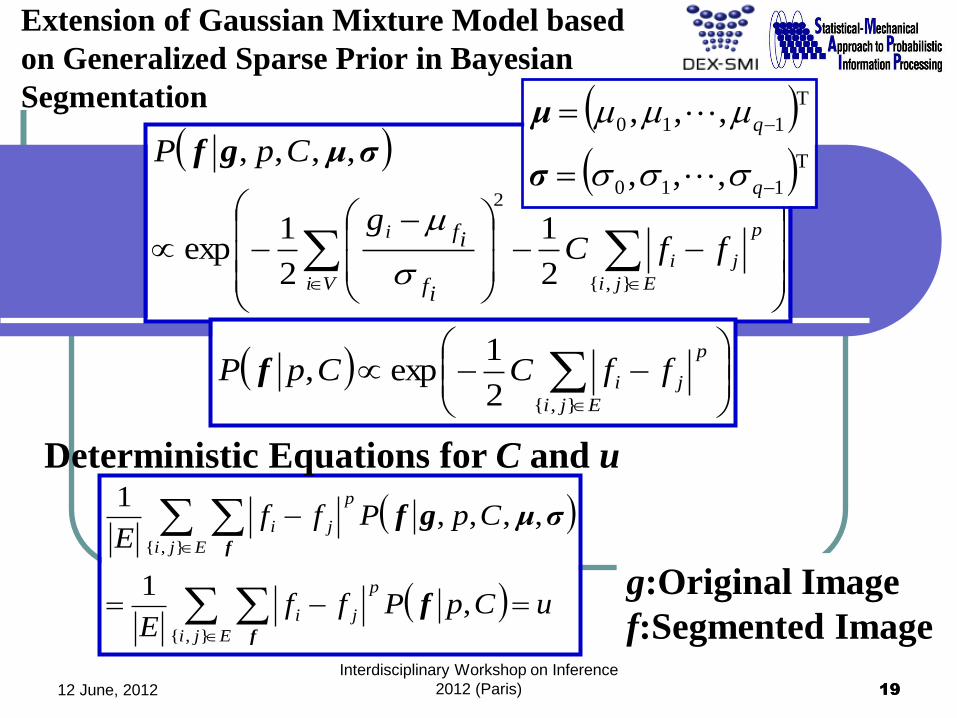
Extension of Gaussian Mixture Model based
on Generalized Sparse Prior in Bayesian
Segmentation
19
Eji
p
ji
Vi
iffC
g
CpP
if
if
},{
2
2
1
2
1exp
,,,,
σμgf
uCpPffE
CpPffE
Eji
p
ji
Eji
p
ji
},{
},{
,1
,,,,1
f
f
f
σμgf
Deterministic Equations for C and u
12 June, 2012
Interdisciplinary Workshop on Inference
2012 (Paris)
Eji
p
ji ffCCpP},{2
1exp,f
T110
T
110
,,,
,,,
q
q
σ
μ
g:Original Image
f:Segmented Image
20
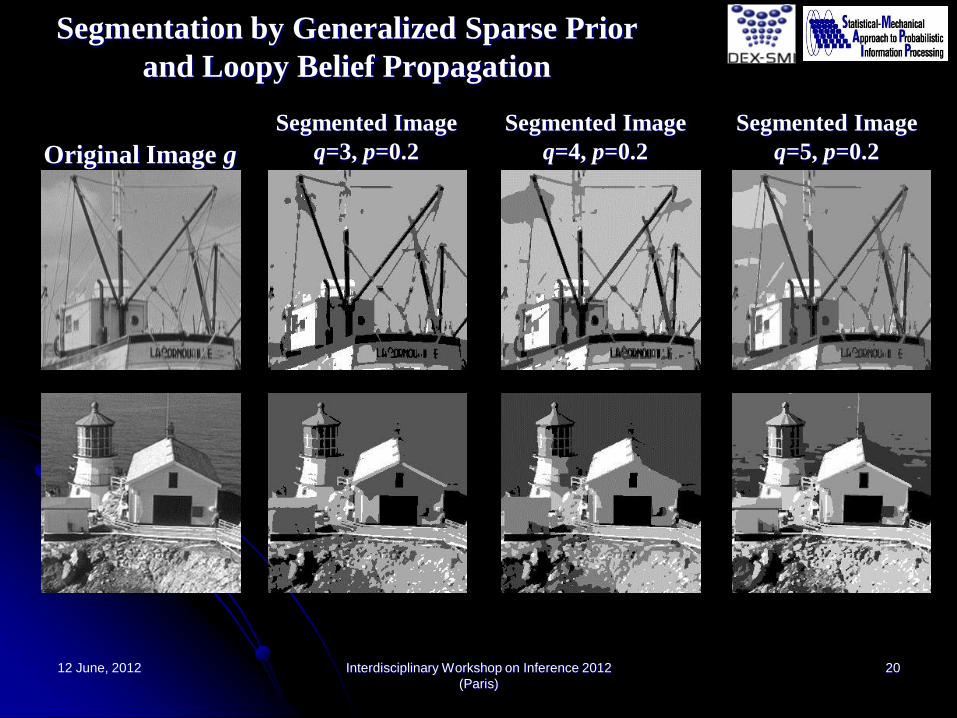
Segmentation by Generalized Sparse Prior
and Loopy Belief Propagation
Segmented Image
q=3, p=0.2 Original Image g
Segmented Image
q=5, p=0.2
12 June, 2012 Interdisciplinary Workshop on Inference 2012
(Paris)
Segmented Image
q=4, p=0.2
21
Outline
1. Introduction
2. Bayesian Image Modeling by Generalized Sparse Prior
3. Noise Reductions by Generalized Sparse Prior
4. Expansions to Segmentations
5. Concluding Remarks
12 June, 2012 Interdisciplinary Workshop on Inference 2012
(Paris)
22
Summary
Formulation of Bayesian image modeling for image processing by means of generalized sparse priors and loopy belief propagation are proposed.
Our formulation is based on the conditional maximization of entropy with some constraints.
In our sparse priors, although the first order phase transitions often appear, our algorithm works well also in such cases.
Numerical experimental results in noise reductions and segmentations have been shown.
12 June, 2012 Interdisciplinary Workshop on Inference 2012
(Paris)
23
References 1. J. Inoue and K. Tanaka: Mean Field Theory of EM Algorithm for Bayesian Gray
Scale Image Restoration, Journal of Physics A: Mathematical and General,
Vol.36, No.43, pp.10997-11010,2003.
2. K. Tanaka, J. Inoue and D. M. Titterington: Probabilistic Image Processing by
Means of Bethe Approximation for Q-Ising Model, Journal of Physics A:
Mathematical and General, Vol. 36, No. 43 (October 2003), pp.11023-11036, 2003.
3. K. Tanaka: Mathematical Structures of Loopy Belief Propagation and Cluster
Variation Method, Journal of Physics: Conference Series, vol.143, article
no.012023, pp.1-18, 2009
4. S. Kataoka, M. Yasuda and K. Tanaka: Statistical Performance Analysis in
Probabilistic Image Processing, Journal of the Physical Society of Japan, vol.79,
no.2, article no.025001, 2010.
5. S. Kataoka, M. Yasuda, K. Tanaka and D. M. Titterington: Statistical Analysis of
the Expectation-Maximization Algorithm with Loopy Belief Propagation in
Bayesian Image Modeling, Philosophical Magazine: The Study of Condensed
Matter, Vol.92, Nos.1-3, pp.50-63,2012.
6. S. Kataoka, M. Yasuda and K. Tanaka: Statistical Analysis of Gaussian Image
Inpainting Problems, Journal of the Physical Society of Japan, Vol.81, No.2
(February 2012), Article No.025001, pp.1-2, 2012.
12 June, 2012 Interdisciplinary Workshop on Inference 2012
(Paris)




























