Embed Size (px)
Citation preview

1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Pada era pembangunan dewasa ini, kebutuhan akan informasi mengenai posisi
suatu obyek di muka bumi semakin diperlukan. Posisi suatu obyek terkait langsung
dengan kualitas penyajian informasi spasial yang umumnya dipresentasikan dalam
bentuk peta. Sebagaimana kemajuan di bidang ilmu dan teknologi yang semakin
pesat, teknologi pemetaan pun sudah sedemikian berkembang, baik dalam teknik
akuisisi data maupun proses pengolahan dan penyajiannya. Alat serta metode akuisisi
data dapat dipilih dengan mempertimbangkan berbagai aspek, salah satunya terkait
dengan obyek atau daerah yang akan dipetakan.
Fotogrametri merupakan salah satu metode akuisisi data untuk mendapatkan
informasi ukuran dan bentuk obyek melalui analisis terhadap rekaman gambar pada
film atau media elektronik. Metode fotogrametri telah diaplikasikan dan
dikembangkan setelah ditemukannya fotografi pada abad ke-18.
Aerial photogrammetry atau fotogrametri udara adalah metode fotogrametri
yang dilakukan melalui pemotretan udara dan berkembang seiring dengan
ditemukannya pesawat yang digunakan sebagai wahana pemotretan. Pada saat itu
close range photogrammetry atau fotogrametri jarak dekat mengadaptasi
perkembangan fotogrametri udara dengan menggunakan kamera yang sama agar
didapat hasil yang sama baiknya. Metode fotogrametri udara menggunakan kamera
metrik yang memiliki fixed focus sehingga memiliki fokus yang sama pula jika
seandainya akan digunakan untuk kasus non-topografi. Kelebihan yang dimiliki oleh
metode fotogrametri jarak dekat terutama adalah tidak memerlukan biaya besar
dalam pelaksanaan pengukuran, akuisisi data dapat dilakukan dengan cepat, dapat
diaplikasikan untuk mengukur obyek yang tidak dapat dijangkau dan obyek dengan
dimensi kecil, serta visualisasi obyek disajikan dalam bentuk foto. Di samping
kelebihan yang telah disebutkan, teknik fotogrametri jarak dekat juga tidak lepas dari
kekurangan yang dimiliki, antara lain hasil ukuran yang tidak dapat diperoleh secara
langsung serta kesalahan yang terjadi pada saat pengambilan dan pemrosesan foto

2
dapat menyulitkan pekerjaan. Selain itu pengukuran untuk obyek kecil dan sulit
dijangkau tidak dapat dilakukan dengan metode fotogrametri udara. Kendala tersebut
menjadi keterbatasan bidang fotogrametri untuk aplikasi jarak dekat pada saat itu.
Seiring berkembangnya teknologi dan komputerisasi, penggunaan kamera nonmetrik
yang relatif murah dapat diterapkan pada metode fotogrametri jarak dekat.
Fotogrametri jarak dekat merupakan teknologi fotogrametri untuk memperoleh
informasi terpercaya tentang obyek fisik dan lingkungan melalui proses perekaman,
pengukuran, dan interpretasi gambaran fotografik dan pola radiasi tenaga
elektromagnetik yang terekam dengan kamera. Dalam perekaman tersebut, kamera
diletakkan di permukaan bumi (terestris) dengan jarak antara obyek yang diukur
dengan kamera tidak lebih dari 100 meter. Hasil dari penelitian sebelumnya dapat
diketahui bahwa ketelitian yang didapat dari metode fotogrametri jarak dekat
mencapai 1:2000 (Hanifa 2007). Aguilar M.A.,dkk (2004) menyatakan bahwa salah
satu aspek yang perlu diperhatikan dalam penerapan metode fotogrametri jarak dekat
adalah jarak pengambilan foto dari obyek ke kamera yang akan berpengaruh pada
ketelitian data yang dihasilkan.
Jarak pengambilan foto dari obyek ke kamera berkaitan dengan resolusi spasial
yang akan berpengaruh terhadap ketelitian yang dihasilkan. Selain itu juga
memengaruhi besar cakupan obyek dalam foto sehingga jarak menjadi pertimbangan
untuk menghasilkan data yang akurat dengan cakupan foto yang optimal. Penelitian
ini dilakukan untuk mengetahui pengaruh jarak terhadap ketelitian hasil pengukuran
dengan fotogrametri jarak dekat untuk obyek berdimensi kecil. Penelitian ini
diharapkan dapat memberi pertimbangan pada penerapan metode fotogrametri jarak
dekat khusunya dalam pemilihan jarak pemotretan sehingga efektivitas hasil dari
metode ini dapat ditingkatkan.
I.2. Rumusan Masalah
Berdasarkan uraian di atas, rumusan masalah yang perlu diketahui adalah
seberapa besar pengaruh perubahan jarak pemotretan terhadap ketelitian koordinat
hasil pengukuran pada teknik fotogrametri jarak dekat.
3
I.3. Tujuan Penelitian
Jarak pengambilan foto dari obyek ke kamera akan berpengaruh terhadap
cakupan foto. Selain itu Jjarak pengambilan foto juga berkaitan dengan resolusi
spasial yang akan berpengaruh terhadap ketelitian yang dihasilkan. Berdasarkan
rumusan masalah yang telah dikemukakan, maka penelitian ini bertujuan untuk
mengetahui ketelitian koordinat hasil pengukuran fotogrametri jarak dekat terhadap
perubahan jarak pemotretan.
I.4. Manfaat Penelitian
Penelitian ini diharapkan dapat memberikan pertimbangan dalam penerapan
teknik fotogrametri jarak dekat. Ketelitian koordinat dipengaruhi oleh jarak
pengambilan foto. Jarak pengambilan foto serta cakupan foto yang optimal
diharapkan dapat menghasilkan koordinat titik dengan ketelitian yang tinggi
sehingga teknik fotogrametri jarak dekat dapat diterapkan lebih lanjut terkait dengan
pengukuran obyek dengan dimensi yang relatif kecil.
I.5. Batasan Masalah
Ruang lingkup pelaksanaan penelitian ini dibatasi oleh :
1. Pemotretan obyek studi dilakukan dengan menggunakan kamera digital
dengan panjang fokus yang sama untuk setiap perubahan jarak
pengambilan foto.
2. Target yang digunakan untuk proses kalibrasi merupakan target yang
diperoleh dari cetakan calibration grid dari perangkat lunak PhotoModeler
Scanner versi 6.2.
3. Pengambilan foto dilakukan dengan tiga variasi jarak, yaitu 6 meter, 9
meter, dan 12 meter.
4. Pemotretan dilakukan pada keadaan basis yang sama untuk setiap jarak
yang berbeda.
5. Pengambilan foto hanya dilakukan pada dua stasiun pemotretan dengan
arah pemotretan yang konvergen.

4
6. Koordinat yang diperoleh dari pengukuran menggunakan Total Station
(TS) tipe reflectorless merupakan ukuran yang diasumsikan benar serta
digunakan sebagai titik kontrol dan titik cek (check point) yang akan
dibandingkan dengan hasil ukuran pemotretan.
I.6. Tinjauan Pustaka
Penelitian dengan metode fotogrametri jarak dekat ini dilakukan untuk
mengetahui seberapa besar ketelitian koordinat yang dapat dihasilkan. Hasil dari
beberapa penelitian sebelumnya menunjukkan ketelitian yang dapat dicapai dari
metode ini.
Cardenal, dkk (2004) melakukan evaluasi terhadap kamera digital nonmetrik
Canon D30 untuk pemodelan bangunan bersejarah. Pemodelan dilakukan dengan
memotret bagian atap dan muka bangunan dengan kombinasi konfigurasi kamera
yang sejajar (paralel) dan konvergen. Hasil dari penelitian ini menunjukkan bahwa
terjadi kesalahan sebesar 5-10 mm untuk pemotretan pada jarak obyek ke kamera
sebesar 15 m.
Hanke (2006) membandingkan tingkat akurasi penentuan posisi tiga dimensi
antara kamera metrik WILD P32 dan kamera nonmetrik Ashai Pentax yang diolah
dengan menggunakan software Photomodeler 2.1. Penelitian dilakukan dengan
membandingkan ketelitian hasil pemotretan dari konfigurasi posisi kamera yang
berbeda untuk kamera metrik dan nonmetrik. Hasil penelitian menunjukkan bahwa
kamera metrik memiliki ketelitian yang lebih tinggi daripada kamera nonmetrik.
Ketelitian kamera metrik dan nonmetrik dipengaruhi oleh konfigurasi posisi kamera
tetapi tidak mengakibatkan perubahan ketelitian yang terlalu signifikan untuk kamera
nonmetrik, dalam hal ini konfigurasi perbedaan ketinggian pengambilan gambar
pada jarak yang sama. Kamera metrik menghasilkan ketelitian rata-rata sebesar
1:6500, sedangkan untuk kamera nonmetrik menghasilkan ketelitian rata-rata sebesar
1:1700.
Hanifa (2007) melakukan penelitian dengan menggunakan kamera digital
nonmetrik Nikon Coolpix 2200 resolusi 2 megapiksel autofokus untuk melakukan
pemantauan deformasi. Sifat kamera autofocus menyebabkan perubahan yang cukup

5
signifikan untuk parameter internal kamera terutama pada nilai jarak utama. Oleh
karena sifat kamera autofocus, maka penentuan parameter internal kamera dilakukan
pada waktu yang sedekat mungkin pada saat pemakaian kamera (self calibration).
Hasil dari penelitian tersebut menyatakan bahwa kamera Nikon Coolpix 2200
resolusi 2 megapiksel mampu mendeteksi deformasi sampai 3mm atau 1:2000 dari
jarak obyek.
Harintaka, dkk (2008) melakukan pemodelan virtual bangunan arkeologi Candi
Kelir menggunakan kamera amatir digital dengan panjang fokus 6 mm. Untuk
menghasilkan kualitas geometrik, maka dilakukan perbandingan antara jarak titik
marking antara model virtual dengan hasil pengukuran langsung. Selisih nilai ukuran
terbesar mencapai 0,717 cm dengan nilai rata-rata selisih ukuran sebesar 0,3994 cm.
Leitch dan Coon (2012) melakukan pemodelan terhadap tiga struktur yaitu
bangunan First United Bank Center, tangga penahan erosi, dan patung koboi Tex
Randall menggunakan perangkat lunak Photomodeler. Hasil dari penelitian ini
menunjukkan perbedaan ukuran di lapangan dengan hasil pengolahan menggunakan
perangkat lunak Photomodeler sebesar 0-2% dari besar ukuran. Perangkat lunak
Photomodeler sangat bermanfaat untuk obyek dengan kumpulan titik, garis, dan
lekukan yang jelas/ tajam.
Jarak merupakan salah satu aspek yang berpengaruh pada tingkat ketelitian
yang dihasilkan dengan metode fotogrametri jarak dekat. Penelitian kali ini
dilakukan dengan variasi jarak kamera ke obyek untuk membandingkan perbedaan
ketelitian yang dihasilkan dengan jarak pemotretan yang berbeda.
I.7. Landasan Teori
I.7.1. Fotogrametri jarak dekat
Fotogrametri dapat diartikan sebagai seni, ilmu, dan teknologi untuk
memperoleh informasi yang dapat dipercaya tentang suatu obyek fisik dan keadaan
di sekitarnya melalui proses perekaman, pengukuran, dan interpretasi citra fotografis
atau rekaman pola radiasi elektromagnetik. Fotogrametri pada dasarnya
diklasifikasikan menjadi dua yaitu fotogrametri terestrial dan fotogrametri udara.
Fotogrametri terestrial menggunakan kamera yang diletakkan secara terestris,

6
sedangkan fotogrametri udara menggunakan wahana berupa pesawat untuk
melakukan pemotretan melalui udara (Wolf 2000). Fotogrametri udara pada dasarnya
digunakan untuk memetakan daerah topografi, sedangkan fotogrametri terestrial
biasa diaplikasikan untuk kasus di luar pemetaan topografi. Fotogrametri
nontopografi, fotogrametri jarak dekat, dan spesial fotogrametri dipakai untuk
mendeskripsikan aplikasi fotogrametri di luar area pemetaan topografi (ASPRS
1989). Fotogrametri jarak dekat adalah teknologi fotogrametri untuk memperoleh
informasi terpercaya tentang obyek fisik dan lingkungan melalui proses perekaman,
pengukuran, dan intrepetasi gambaran fotografik dan pola radiasi tenaga
elektromagnetik yang terekam dengan kamera yang terletak di permukaan bumi
(terestris). Istilah fotogrametri jarak dekat diperkenalkan sebagai suatu teknik
fotogrametri dengan jarak antara kamera dengan obyek kurang dari 100 m.
(Atkinson 1996 ).
Dalam bidang geodesi, metode fotogrametri jarak dekat ini banyak
dimanfaatkan karena dapat memberikan informasi jarak, luas, volume. Dari hasil
pengukuran dengan metode fotogrametri jarak dekat dapat diperoleh koordinat tiga
dimensi dalam sistem foto. Untuk itu agar dapat dibandingkan dengan koordinat
yang sebenarnya maka harus dilakukan transformasi ke sistem koordinat tanah.
Fotogrametri jarak dekat banyak diaplikasikan dalam berbagai bidang non
topografi karena memiliki banyak keunggulan. Aplikasi yang berkembang antara lain
dalam bidang arsitektur, arkeologi, forensik, medis, deformasi, industri dan lainnya.
Beberapa kelebihan dari fotogrametri jarak dekat adalah:
1. Tidak melakukan kontak langsung terhadap obyek selama pengukuran
sehingga dapat digunakan untuk mengukur obyek yang sulit diakses
(Thompson 1962 dalam Atkinson 1996).
2. Akuisisi data dapat dilakukan dengan cepat dan dapat digunakan untuk
memroses terkait dengan ukuran obyek (Atkinson 1996).
3. Dapat digunakan untuk mengukur obyek yang relatif kecil dan atau tidak
beraturan (Thompson 1962 dalam Atkinson 1996).
4. Memiliki nilai yang ekonomis terutama untuk pengukuran obyek yang
sifatnya kompleks.
7
5. Foto adalah dokumen yang terkait dengan waktu dan dapat disimpan
dalam format digital sehingga dapat dipakai jika sewaktu-waktu
dibutuhkan.
6. Evaluasi dari foto dapat dilakukan kapanpun di laboratorium.
Pengulangan pemotretan dan penambahan selalu bisa dilakukan dan bisa
dioptimalkan menurut permintaan pengguna (Trieb,dkk 2004).
Namun di samping kelebihan, juga ada beberapa kelemahan dari fotogrametri
jarak dekat, yaitu (Leitch 2002 dalam Hanifa 2007):
1. Hasil ukuran tidak dapat diperoleh secara langsung.
2. Membutuhkan teknik yang kompleks dan kurang praktis jika
diaplikasikan untuk analisis yang relatif kecil (Trieb, dkk 2004).
3. Teknik fotogrametri akan terbatas pada area cakupannya, sehingga ada
kemungkinan tidak mencakup seluruh area yang akan difoto (Trieb, dkk
2004).
4. Kebutuhan akan spesialisasi dan peralatan pendukung yang mahal dapat
membuat harga operasionalnya menjadi tinggi dalam implementasi
(Trieb, dkk 2004).
5. Kesalahan yang terjadi pada saat pengambilan dan pemrosesan foto dapat
mempengaruhi ketelitian hasil.
Pada prinsipnya metode fotogrametri dilakukan dengan melakukan
pengambilan gambar di sekitar/ sekeliling obyek yang akan dipotret dengan posisi
kamera yang konvergen (Atkinson 1996). Terdapat empat langkah utama pada proses
fotogrametri, yaitu (1) pemasangan titik kontrol sebagai koordinat referensi, (2)
perencanaan dan pelaksanaan pemotretan, (3) pemrosesan foto, (4) pendefinisian titik
koordinat meggunakan foto (Hilton 1985 dalam ASCE 2003). Sebelum dilakukan
pengambilan gambar, perlu pemasangan premark. Premark ini menyebar pada
permukaan obyek yang akan dipotret sehingga dapat terlihat di foto yang satu dan
lainnya. Titik-titik ini akan dipakai untuk proses referencing. Titik premark diukur
koordinatnya dengan menggunakan TS yang akan digunakan sebagai titik kontrol
dan sebagai data koordinat pembanding dari koordinat hasil pengolahan foto.

8
Gambar I.1 Posisi pengambilan gambar obyek dengan teknik fotogrametri
jarak dekat.
I.7.2. Fotogrametri digital
Era digital semakin meluas sejak teknologi komputerisasi mengalami
perkembangan yang cepat. Teknologi telah mengubah sistem analog menjadi digital
dalam banyak bidang terutama untuk aplikasi fotogrametri jarak dekat dan satelit
fotogrametri. Pekerjaan yang fleksibel dan ekonomis menjadi unsur utama
keterlibatan sistem digital dalam aplikasi fotogrametri jarak dekat. Beberapa
keuntungan menggunakan foto digital (Atkinson 1996):
1. Foto digital dapat ditampilkan dan diolah menggunakan komputer (tidak
perlu alat optis ataupun mekanis).
2. Sistem pengolahannya stabil dan tidak memerlukan kalibrasi.
3. Penajaman gambar dapat dilakukan.
4. Automatisasi dapat dilakukan.
Penggunaan kamera digital erat kaitannya dalam perkembangan era digital dan
keekonomisannya untuk aplikasi fotogrametri jarak dekat. Kamera digital merupakan
salah satu jenis kamera non-metrik yang sering digunakan untuk berbagai
kepentingan. Kamera digital mamiliki komponen utama yang terdiri atas lensa,
sensor, dan media penyimpanan. Kamera ini memiliki karakteristik desain yang
berbeda dengan kamera analog. Perbedaan utamanya ialah pada media film seluloid
yang diganti oleh sensor optik elektrik seperti Charge–Couple Device (CCD) atau
Complementary Metal Oxide Semiconductor (CMOS). CCD berfungsi mengubah
SISI 8
SISI 4
SISI 5 SISI 1
SISI 6
SISI 2
SISI 7 SISI 3

9
photon yang jatuh mengenai permukaan sensor menjadi elektron yang selanjutnya
elektron ini diakumulasikan ke dalam kapasitor dan diubah menjadi bentuk sinyal
elektronik. CCD memiliki keunggulan di mana sensor lebih peka terhadap cahaya
sehingga pada kondisi redup tanpa bantuan flash masih bisa menangkap obyek
dengan baik. Semakin banyak piksel yang terdapat di dalam sensor, maka
resolusinya semakin tinggi. Konsekuensi yang ditimbulkan ialah media
penyimpanannya memerlukan kapasitas yang lebih besar (Suharsana 1997).
Kamera digital juga dilengkapi dengan Liquid Crystal Display (LCD), yaitu
layar monitor mini yang digunakan untuk melihat secara langsung hasil pemotretan
yang dilakukan. Adanya LCD ini dapat membantu pengguna untuk memilih dan
mengatur menu secara interaktif, serta apabila hasil pemotretan kualitasnya kurang
baik, maka dapat langsung dihapus, kemudian dilakukan pemotretan ulang. Terdapat
sebuah istilah yang dikenal dengan nama ppi (pixel per inch) pada kamera digital.
Ppi menunjukkan jumlah piksel per inchi linear dalam sebuah foto. Resolusi foto
tidak dapat dipisahkan dengan ppi. Semakin besar ppi maka jumlah piksel per satuan
inchinya semakin banyak, sehingga obyek pada foto akan semakin jelas atau resolusi
fotonya baik (Ikawati 2012).
I.7.3. Geometri kamera
1.7.3.1. Geometri foto tunggal. Pemotretan pada pekerjaan fotogrametri
dilakukan dengan merekam bayangan obyek yang terbentuk di bidang bayangan
dalam suatu media. Media yang dipergunakan dalam pemotretan adalah film
fotografik yang terbuat dari bahan kaca atau film. Pada kamera digital, lembar film
atau film digantikan oleh plat sensor fotosensitif seperti sensor tipe solid state seperti
CCD (Charge Couple Device). Ketika pengambilan foto dilakukan, berkas sinar dari
obyek akan merambat menyerupai garis lurus menuju ke pusat lensa kamera hingga
berkas sinar ini mencapai bidang proyeksi. Keadaan dimana titik obyek pada dunia
nyata (real world), titik pusat (fokus), dan titik obyek pada bidang foto terletak satu
garis dalam suatu ruang dinamakan kondisi kesegarisan berkas sinar atau kondisi
kolinearitas (collinearity condition). Proyeksi sentral digunakan pada saat
perekaman, di mana garis-garis proyeksi dari obyek dengan koordinat ruang P (Xp,
Yp, Zp) ke bidang proyeksi melalui suatu titik pusat proyeksi Xo, Yo, Zo sehingga

10
terbentuk posisi obyek pada sistem koordinat foto (xp, yp, -c) seperti yang
ditunjukkan pada Gambar I.2 berikut.
Gambar I.2. Kondisi kolinear atau prinsip kesegarisan (Sumber: Atkinson, 1996)
Keterangan:
Xo, Yo, Zo = titik pusat kamera
xp, yp, -c = koordinat titik P pada sistem koordinat foto
XP, YP, ZP = koordinat titik P pada sistem koordinat tanah
Di dalam ASPRS (1989) dijelaskan bahwa proyeksi sentral pada fotografi
berbeda dengan proyeksi ortografi di mana proyeksi ortografi menunjukkan skala
yang konstan di sepanjang garis proyeksinya, sedangkan pada fotografi menunjukkan
skala yang berbeda pada setiap titik yang diproyeksikan. Skala suatu titik yang
mendekati pusat proyeksi pada proyeksi sentral akan lebih besar daripada skala suatu
titik yang jauh dari pusat proyeksi. Variasi skala pada foto menyebabkan
kekurangtelitian pengukuran pada satu foto. Semakin besar variasi jarak obyek ke
lensa kamera, semakin besar pula variasi skala yang disajikan. Hal tersebut
menyebabkan kemungkinan terjadinya relief displacement atau pergeseran relief.
Besarnya pergeseran relief bergantung pada jarak titik pada foto ke pusat proyeksi.
Semakin jauh dari pusat proyeksi, semakain besar kemungkinan terjadinya
pergeseran relief..
1.7.3.2. Geometri dua buah foto. Menurut Leitch (2000) dalam Hanifa (2007),
untuk mendapatkan posisi obyek pada dunia nyata, diperlukan berkas sinar obyek
dari foto lainnya, dimana kedua berkas tersebut akan berpotongan pada obyek yang
Y X
Z
Pusat kamera ( Xo, Yo, Zo)
Sistem koordinat ruang
Bidang proyeksi
y
x
z P (XP, YP, ZP )
p (xo, yo)
(xp, yp,-c) c
y
x Sistem koordinat foto

11
sama di dunia nyata. Perpotongan dari kedua berkas sinar inilah yang dinamakan
dengan interseksi spasial. Jika elemen orientasi luar dari dua buah kamera dengan
pusat perspektif di O1 dan O2 diketahui, maka perpotongan sinar garis dari foto satu
dan foto dua akan dapat menentukan posisi koordinat suatu obyek A yang terekam
dalam kedua foto tersebut (Atkinson 1996) (Gambar 1.3).
Gambar I.3. Ilustrasi interseksi dua buah foto (Sumber: Harintaka, 2012)
Pusat perspektif kamera dari setiap foto harus diketahui untuk dapat
menentukan posisi dari titik obyek relatif terhadap sistem koordinat kamera.
I.7.4. Kalibrasi kamera
Kamera fotogrametri tidak mempunyai lensa yang sempurna, sehingga proses
perekaman yang dilakukan akan memiliki kesalahan. Oleh karena itu perlu dilakukan
pengkalibrasian kamera untuk dapat menentukan besarnya penyimpangan-
penyimpangan yang terjadi. Kalibrasi adalah kegiatan untuk memastikan hubungan
antara harga-harga yang ditunjukkan oleh suatu alat ukur dengan harga yang
sebenarnya dari besaran yang diukur. Kalibrasi kamera dilakukan untuk menentukan
parameter distorsi, meliputi distorsi radial dan distorsi tangensial, serta parameter-
parameter lensa lainnya, termasuk juga panjang titik utama (c), serta titik pusat
fidusial foto. Model kalibrasi terdiri dari element interior orientasi (xo, yo, c),
koefisien distorsi lensa (K1, K2, K3, P1, and P2). Distorsi lensa dapat menyebabkan
bergesernya titik pada foto dari posisi yang sebenarnya, sehingga memberikan

12
ketelitian pengukuran yang tidak baik, namun tidak mempengaruhi kualitas
ketajaman citra yang dihasilkan (Fraser 1997 dalam Hanifa 2007).
Ilustrasi akibat adanya distorsi lensa dapat dilihat seperti pada Gambar I.4.
Gambar I.4. Ilustrasi akibat adanya distorsi lensa dan tidak ortogonalnya sumbu (affine deformation) (Sumber: Hanifa, 2007)
Kalibrasi kamera dilakukan untuk menentukan besarnya distorsi pada lensa.
Kalibrasi kamera dapat dilakukan dengan beberapa metode, yaitu (Stensaas 2007
dalam Ikawati 2012) :
1. Laboratory calibration
Merupakan kalibrasi yang dilakukan di laboratorium dan terpisah dengan
pemotretan obyek. Metode ini cocok digunakan untuk kalibrasi kamera
metrik. Metode ini terbagi menjadi dua jenis, yaitu optical laboratory
calibration dan test range calibration.
2. In field calibration
Metode kalibrasi in field calibration menggunakan target dan parameter
kalibrasi kamera dihitung menggunakan prinsip bundle adjustment, plumb
line, atau Direct Linear transform (DLT)
3. Self calbration
Kalibrasi pada saat pemotretan dikenal dengan self calibration, yakni
mengkalibrasi kamera sekaligus pada obyek amat dan data diambil
bersamaan dengan data observasi. Pada self calibration pengukuran titik-

13
titik target pada obyek pengamatan digunakan sebagai data untuk
penentuan titik obyek sekaligus untuk menentukan parameter kalibrasi
kamera.
Kalibrasi kamera yang dilakukan pada penelitian ini menggunakan metode in field
calibration dengan menggunakan target cetakan calibration grid berupa titik-titik
target dengan empat buah titik kontrol.
I.7.5. Perangkat lunak PhotoModeler Scanner
PhotoModeler Scanner adalah aplikasi perangkat lunak (software) yang dibuat
oleh Eos System Inc yang tergabung dalam Windows Corporation (Setyadi 1998).
Perangkat lunak ini digunakan untuk menghasilkan ukuran dan model 3D yang
akurat dari pengukuran dengan fotografi yang telah diubah menjadi format digital.
Proses tersebut dinamakan dengan photo-based 3D scanning. Proses ini
menghasilkan titik-titik pada model permukaan/ dense surface modelling (DSM)
yang disebut dengan point cloud.
Untuk dapat membentuk model 3D pada PhotoModeler Scanner perlu
dilakukan beberapa langkah pekerjaan di mulai dari orientasi dalam, marking
(penandaan), referencing dan processing (PhotoModeler Scanner Help).
1.7.5.1. Orientasi dalam. Photomodeler mencakup fungsi kalibrasi kamera
untuk memberi informasi tentang parameter internal kamera. Parameter internal
kamera tersebut meliputi panjang titik utama, distorsi lensa, aspek format rasio, dan
posisi titik utama. Principal distance atau panjang titik utama merupakan jarak dari
titik proyeksi perspektif sentral ke bidang proyeksi foto (Atkinson 1996). Panjang
fokus sering diartikan sama dengan principal distance. Kalibrasi panjang fokus
merupakan hasil dari distribusi rata-rata distorsi radial (ASP 1989). Distorsi lensa
pada PhotoModeler mencakup distorsi radial dan distorsi tangensial. Distorsi radial
adalah pergeseran linier titik foto dalam arah radial terhadap titik utama dari posisi
idealnya ( ASP 1980 dalam Hanifa 2007). Distorsi radial diekspresikan sebagai
fungsi polinomial dari jarak radial terhadap titik utama foto (Atkinson 1996) sebagai
berikut :
δr = K1r3 + K2r
5 + K3r7 .................................................................... (I.1)

14
Di mana δr merupakan radial displacement dengan K adalah konstanta dan r2 = (x-
xo)2 + (y-yo)
2
Distorsi tangensial adalah pergeseran linier titik di foto pada arah normal (tegak
lurus) garis radial melalui titik foto tersebut (ASP 1980 dalam Hanifa 2007). Distorsi
tangensial disebabkan karena kesalahan sentering elemen lensa dalam satu gabungan
di mana titik pusat elemen lensa dalam gabungan lensa tersebut tidak terletak dalam
satu garis lurus (Atkinson 1996). Pergeseran ini dideskripsikan dengan 2 persamaan
yaitu untuk pergeseran ke arah x dan ke arah y :
�� = P1 [r2 + 2 ( x – xo )
2 ] + 2 P2 ( x – xo ) (y – yo ) ...................... (I.2)
�� = P1 [r2 + 2 ( y – yo )
2 ] + 2 P2 ( x – xo ) (y – yo ) ...................... (I.3)
Kalibrasi kamera pada PhotoModeler Scanner dilakukan untuk memberikan
hasil ukuran yang akurat. Kamera kalibrator dalam PhotoModeler Scanner mampu
menyimpan informasi tambahan untuk membantu mengukur kualitas hasil kalibrasi.
Keseluruhan RMS Residual dan Maksimum Residual memberikan umpan balik yang
berguna tentang keberhasilan kalibrasi dan sangat berguna ketika membandingkan
dua kalibrasi dari kamera yang sama. Semakin kecil nilai RMS Residual maka
semakin baik pula kualitas hasil kalibrasi.
Langkah yang harus dilakukan untuk memulai proses kalibrasi kamera adalah
dengan memasukkan minimal 6 foto hasil pemotretan terhadap calibration grid yang
dilakukan pada sisi pemotretan yang berbeda. Proses kalibrasi kamera pada
penelitian ini menggunakan Automatic Camera Calibration. Kalibrasi akan berjalan
secara otomatis di mana software akan mengidentifikasi dan menandai empat coded
targets 8 bit pada masing-masing foto. Setelah itu software akan mengestimasi
panjang fokus kamera, menentukan orientasi dan melakukan referencing secara
otomatis. Hasil dari proses kalibrasi kamera akan menghasilkan parameter internal
kamera.
1.7.5.2. Marking. Marking merupakan proses penandaan obyek pada foto.
Penandaan obyek pada foto dapat berupa titik, kurva, silinder, maupun penandaan
bagian tepi obyek. Penelitian ini menggunakan penandaan obyek berupa titik
terhadap titik target yang tampak pada foto. Proses marking dimaksudkan untuk
memudahkan melakukan proses selanjutnya yaitu referencing.

15
Penandaan titik pada PhotoModeler Scanner dapat dilakukan secara otomatis
yaitu dengan Automatic Target Marking. Penandaan titik dengan Automatic Target
Marking dapat memberikan ketelitian yang tinggi berupa sub-piksel.
1.7.5.3. Referencing. Referencing adalah proses untuk menghubungkan titik
yang sama pada sepasang foto atau lebih. Dalam project yang melibatkan beberapa
titik dan foto, referencing adalah langkah yang diperlukan untuk memastikan project
akan memproses dengan benar dan untuk memastikan obyek akan menampilkan
posisi 3D. Proses referencing dilakukan minimal pada 6 titik agar foto dapat
terorientasi dengan baik.
1.7.5.4. Processing. Processing dilakukan untuk mengolah foto agar
menghasilkan model 3D. Tahap processing pada PhotoModeler Scanner melalui dua
tahap yaitu audit dan adjustment. Audit digunakan untuk memeriksa kualitas dari
keseluruhan foto agar terbentuk model 3D yang baik. Pada tahap adjustment,
PhotoModeler Scanner akan menjalankan sejumlah algoritma untuk menghasilkan
model 3D dan meminimalisasi kesalahan agar terbentuk model 3D yang teliti.
Koordinat foto dari suatu obyek diperoleh dari persamaan kolinear seperti yang
ditunjukkan pada Persamaan 1.4 dan Persamaan 1.5 dengan 6 parameter orientasi
luar yaitu parameter rotasi ω, φ, κ dan koordinat Xo, Yo, Zo serta parameter orientasi
dalam c, xo, yo dan minimal 3 titik koordinat tanah X, Y, Z diketahui (Atkinson
1996). Persamaan ini merupakan persamaan dasar yang digunakan untuk proses
adjustment.
��= −�[���(�����)����(�����)����(�����)]
[���(�����)����(�����)����(�����)] ................................ (I.4)
��= −�[���(�����)����(�����)����(�����)]
[���(�����)����(�����)����(�����)] ............................... (I.5)
Dengan c merupakan principal distance/ panjang titik utama, dan ��� merupakan
elemen dari matriks rotasi [R]. Adapun bentuk matriks rotasi ditunjukkan pada
persamaan (I.6):
������
cos� cos � sin� sin� cos � + cos� sin � − cos� sin � cos � + sin� sin �= − cos � cos � − sin� sin� cos � + cos� sin � cos� sin � cos � + sin� sin �
sin� − sin� cos� cos� cos�
(I.6)

16
Adjustment merupakan suatu bagian penting dalam fotogrametri jarak dekat
yang digunakan sebagai proses penentuan atau perhitungan parameter orientasi
dalam/ interior orientation (IO), orientasi luar/ exterior orientation (EO) yaitu ω, φ,
κ, Xo, Yo, Zo, dan koordinat obyek yang dihitung secara bersamaan dengan
menggunakan teknik hitung kuadrat terkecil (Tjahjadi 2008 dalam Pantimena 2011).
Proses perhitungan bundle adjustment akan menghasilkan tingkat pengukuran
dengan akurasi tinggi (Shirkhani et al. 2006 dalam Pantimena 2011).
1.7.5.5. Ketelitian PhotoModeler Scanner. PhotoModeler Scanner dapat
menghasilkan model 3D yang akurat dalam waktu yang relatif singkat. Keakuratan
tersebut juga dipengaruhi oleh faktor terkait pengukuran yang dilakukan. Perangkat
lunak ini mensyaratkan beberapa hal agar diperoleh hasil pengolahan yang akurat,
yaitu :
1. Sudut pemotretan diusahakan mendekati besar sudut 90° agar kesalahan
posisi titik relatif lebih kecil.
Gambar 1.5. Lokasi kesalahan titik pada posisi kamera yang baik.
Stasiun 1 Stasiun 2
Lokasi titik yang benar Lokasi titik yang salah
Sinar yang benar dari stasiun 2 Sinar yang benar dari stasiun1
Sinar yang salah dari stasiun 1
17
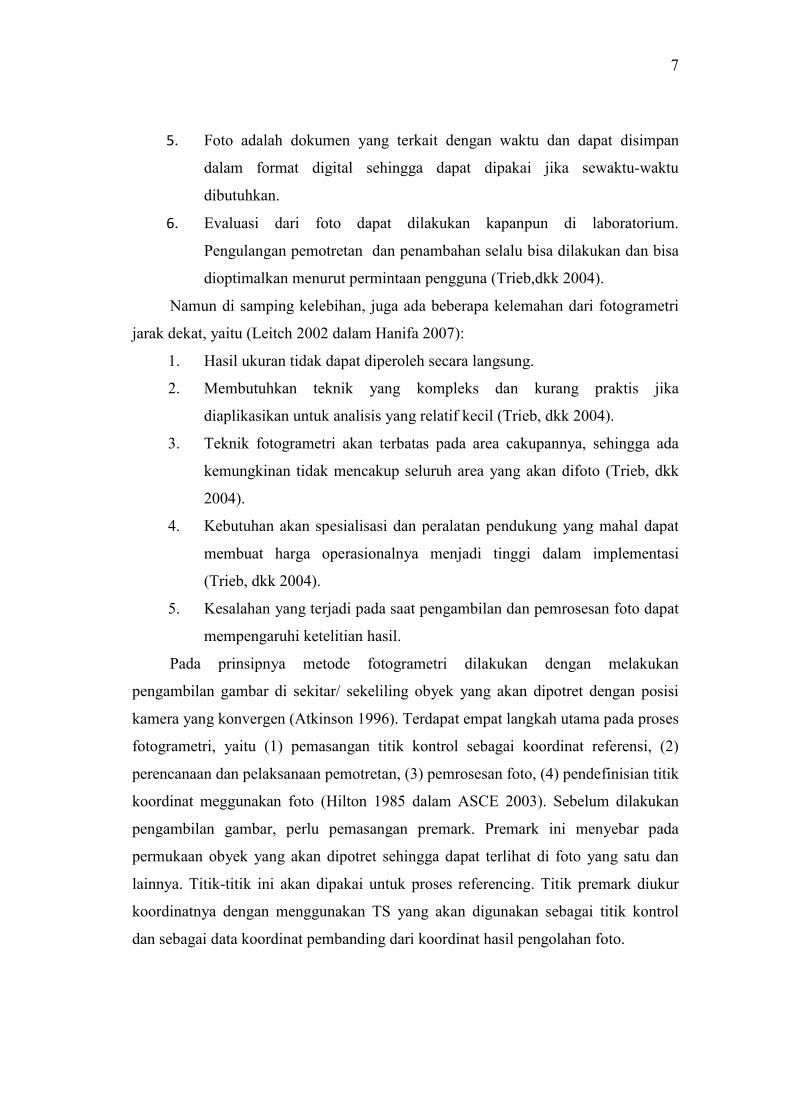
Gambar 1.6. Lokasi kesalahan titik pada posisi kamera yang kurang baik.
Gambar 1.5 dan Gambar 1.6 menunjukkan bahwa kesalahan titik yang
terjadi pada posisi kamera yang mendekati 90° lebih kecil daripada
kesalahan titik pada posisi kamera dengan sudut pemotretan yang kecil.
2. Usahakan mengambil minimal 3 foto dari suatu obyek pada tiga stasiun
pemotretan yang berbeda. Hal ini dimaksudkan agar seluruh bagian obyek
dapat tercakup dan apabila posisi titik pada salah satu foto salah, maka dua
foto lain dapat mengkompensasi posisi yang benar.
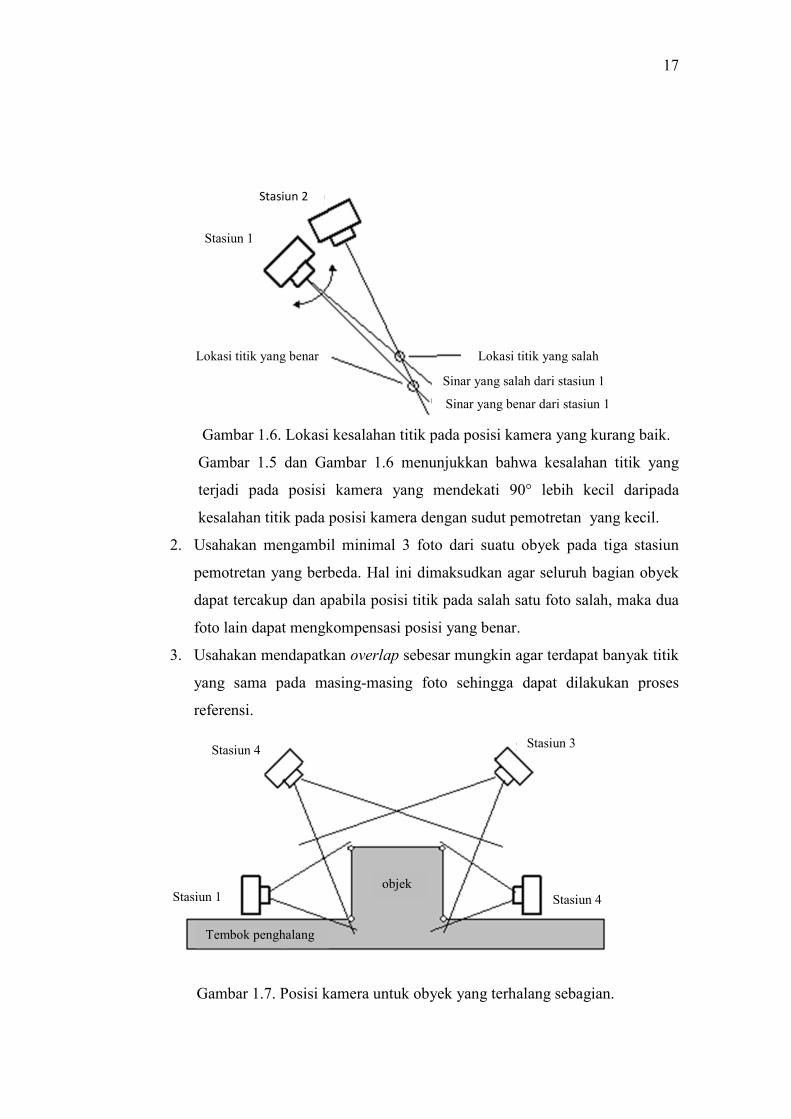
3. Usahakan mendapatkan overlap sebesar mungkin agar terdapat banyak titik
yang sama pada masing-masing foto sehingga dapat dilakukan proses
referensi.
Gambar 1.7. Posisi kamera untuk obyek yang terhalang sebagian.
Sinar yang salah dari stasiun 1
Sinar yang benar dari stasiun 1
Lokasi titik yang salah Lokasi titik yang benar
Stasiun 1
Stasiun 2
Stasiun 3
Stasiun 4
Stasiun 4
Stasiun 1 objek
Tembok penghalang
18
Beberapa langkah harus dilakukan untuk menyelesaikan project menggunakan
perangkat lunak PhotoModeler Scanner, yaitu kamera yang digunakan untuk
memotret harus dikalibrasi terlebih dahulu agar parameter internal kamera dapat
ditentukan. Kemudian pemotretan terhadap obyek dilakukan dengan memastikan tiap
foto memperoleh cakupan obyek yang cukup dan banyak overlap. Photomodeler
kemudian akan mengorientasikan dan mereferensikan setiap foto sebelum model 3D
dibuat. Penyekalaan dapat dilakukan terhadap model dan dapat diekspor ke
AutoCAD, Google earth, 3D studio, dan aplikasi berbasis 3D yang lainnya (Eos
system 2010 dalam Leitch 2012).
Kualitas akurasi project dalam PhotoModeler Scanner ditentukan oleh
beberapa hal (PhotoModeler 6 Help), yaitu :
1. Kualitas kalibrasi kamera.
Kalibrasi digunakan untuk menentukan parameter orientasi dalam kamera
sehingga pemrosesan foto yang melibatkan kalibrasi kamera akan
memberikan akurasi hasil yang lebih tinggi.
2. Resolusi kamera.
Semakin besar resolusi piksel kamera, semakin tinggi akurasi yang akan
diperoleh. Hal tersebut berhubungan dengan resolusi spasial yang akan
dihasilkan, karena semakin tinggi resolusi spasial maka semakin presisi
pula proses penandaan titik pada foto.
3. Geometri posisi kamera.
Selama melakukan proses, PhotoModeler Scanner akan memperhitungkan
posisi dan sudut kamera pada setiap foto atau disebut dengan orientasi.
Kualitas orientasi akan menentukan ketelitian dari posisi titik pada foto.
4. Presisi penandaan titik.
Presisi penandaan titik juga menjadi salah satu indikator dalam penentuan
kualitas project. Kesalahan dalam penandaan titik akan memengaruhi
keseluruhan akurasi titik sehingga perlu dilakukan eliminasi terhadap
kesalahan penandaan titik yang terlalu besar. PhotoModeler Scanner
merekomendasikan keseluruhan project memiliki nilai kesalahan
penandaan titik di bawah 10 piksel serta 3 piksel untuk project yang
disertai dengan proses kalibrasi kamera.

19
I.7.6. Hasil pemodelan tiga dimensi
Secara teoritis, perhitungan ketelitian dari pengukuran tiga dimensi pada foto
stereo berkaitan dengan skala dan panjang basis foto (Cramer 2006 dalam Lee 2008)
dirumuskan sebagai berikut :
Sx = Sy = m x Sp x �
�............................................................................ (I.7)
Sz = m x �
� x Sp x
�
� ............................................................................ (I.8)
Penjelasan persamaan di atas adalah :
Sx, Sy, Sz = ketelitian x, y, z
Sp = ketelitian pengukuran dalam koordinat foto
m = faktor skala
b = panjang basis
H = jarak kamera ke obyek
Persamaan di atas secara teoritis hanya dipertimbangkan untuk ketelitian foto
stereo dari dua buah foto. Untuk saat ini perhitungan dengan menggunakan bundle
adjustment lebih dipertimbangkan karena memberikan ketelitian yang lebih baik.
Ketelitian perhitungan bundle adjustment tidak hanya tergantung dari skala dan
panjang basis sehingga secara teoritis ketelitian dari persamaan di atas merupakan
sebagian kecil dari penentuan ketelitian hasil pengukuran.
I.7.7. Ketelitian koordinat tiga dimensi
Selisih koordinat hasil pengukuran total station (TS) yang diasumsikan sebagai
koordinat sebenarnya dengan hasil pengolahan foto dapat dihitung dengan
menggunakan persamaan matematis sebagai berikut:
dXi = XTSi – Xfotoi
dYi = YTSi – Yfotoi
dZi = ZTSi – Zfotoi ............................................................................ (I.9)
Ketelitian koordinat titik target dapat dihitung dengan menggunakan persamaan
seperti berikut:
RMSe X = �∑(���������)�
�

20
RMSe Y = �∑(���������)�
�
RMSe Z = �∑(���������)�
� ........................................................................ (I.10)
1.8. Hipotesis
Ketelitian koordinat titik hasil pengolahan foto akan berbanding terbalik
terhadap jarak pengambilan foto. Semakin dekat jarak pengambilan foto maka
ketelitian koordinat titik akan semakin bertambah.





























