Embed Size (px)
DESCRIPTION
Augmenting Data Structures. Advanced Algorithms & Data Structures Lecture Theme 07 – Part II Prof. Dr. Th. Ottmann Summer Semester 2006. Examples for Augmenting DS. Dynamic order statistics: Augmenting binary search trees by size information - PowerPoint PPT Presentation
Citation preview

Augmenting Data Structures
Advanced Algorithms & Data Structures
Lecture Theme 07 – Part II
Prof. Dr. Th. Ottmann
Summer Semester 2006

2
Examples for Augmenting DS
• Dynamic order statistics: Augmenting binary search trees by size information
• D-dimensional range trees: Recursive construction of (static) d-dim range trees
• Min-augmented dynamic range trees: Augmenting 1-dim range trees by min-
information
• Interval trees
• Priority search trees

3
Interval Trees (CLR-Version)
Problem: Given a set R of intervals that changes under insertions and deletions,
construct a data structure to store R that can be updated in O(log n) time and that can
find for any given query interval i an interval in R that overlaps i, and returns nil if there
is no such interval, in O(log n) time.
Idea: Store the set of intervals in an appropriately augmented balanced binary search
tree and design an algorithm for the new operation.
Interval-search(T, i): Report an interval stored in T that overlaps the query interval i, if
such an interval exists, and Nil otherwise.

4
Observation
Let i = [low(i), high(i)] and i‘ = [low(i‘), high(i‘)] be two intervals.
Then i and i‘ overlap if and only if
low(i) ≤ high(i‘) and low(i‘) ≤ high(i)
Any two intervals satisfy the interval trichotomy:
a) i and i‘ overlap
b) high(i) ≤ low(i‘)
c) high(i‘) ≤ low(i)

5
Interval
Trichotomy
The cases when intervals I1 and I
2 overlap:
The cases when intervals I1 and I
2 do not overlap:
x1
y1
x2
y2
x1
y1
x2
y2
x1
y1
x2
y2
x1
y1
x2
y2
x2
y2
x1
y1 x
1y
1
x2
y2

6
Interval tree (CLR Version)
[0,3]
[6,10]
[8,9]
[15,23]
[16,21]
[17,19]
[25,30]
[27,33]
[26,26]
[5,8]
[29,30]
3
9 21
30
26
30
8 33
10 33
33
[19,20]
20
Each node v stores an interval int(v) and the maximumupper endponit of all intervals storedin the subtree rooted at v;The interval tree is a search treeon the lower endpoints of intervals.
Max(v) is the maximum valueof all right endpoints in the subtreerooted at v.
7
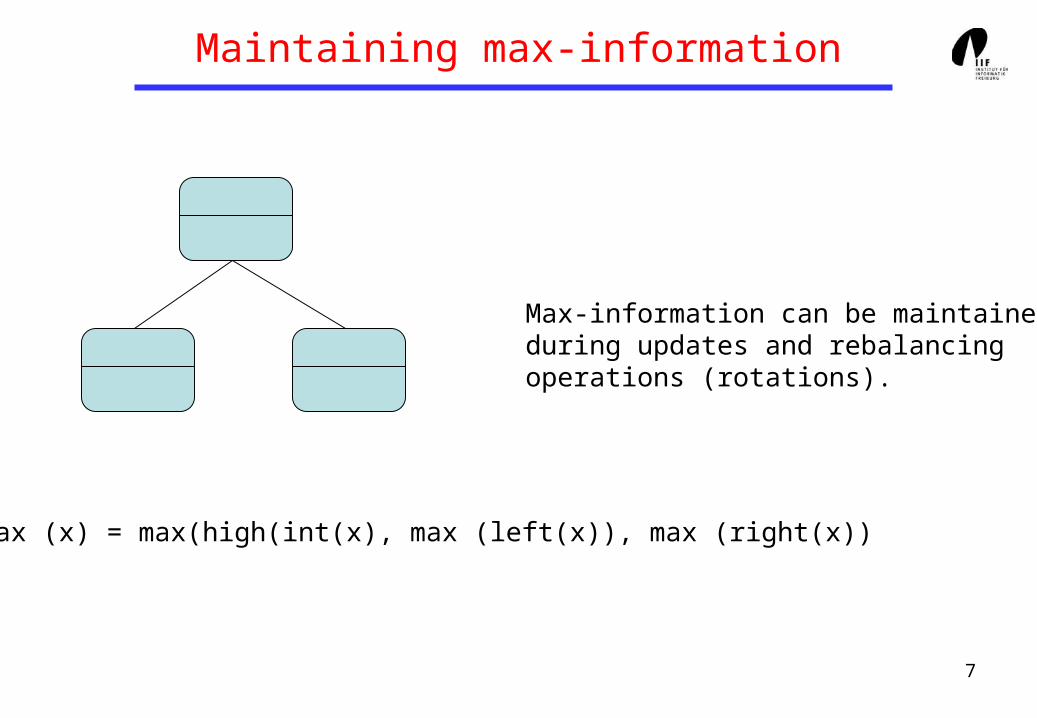
Maintaining max-information
Max (x) = max(high(int(x), max (left(x)), max (right(x))
Max-information can be maintainedduring updates and rebalancingoperations (rotations).

8
Finding an interval in T that overlaps interval i
[0,3]
[6,10]
[8,9]
[15,23]
[16,21]
[17,19]
[25,30]
[27,33]
[26,26]
[5,8]
[29,30]
3
9 21
30
26
30
8 33
10 33
33
[19,20]
20
Interval-search(T, i)
x root(T)while x ≠ Nil and i does not overlap int(x) do if left(x) ≠ Nil and max(left(x))≥ low(i) then x left(x) else x right(x)return x
Interval-search can be carried out in time O(height T).
Observation: if int(x) does notoverlap i, the search alwaysproceeds in a safe direction!

9
Interval Trees: Point-set Variant
Problem: Given a set R of intervals that changes under insertions and deletions,
construct a data structure to store R that can be updated in O(log n) time and that can
find for any given query interval i an interval in R that overlaps i, and returns nil if there
is no such interval, in O(log n) time.
Solution: Map intervals to points and store points in appropriately augmented tree.
i
l = low[i] r = high[i]
(l, r)

10
Max-augmented
Range
Tree
(2, 5) (3, 4) (4, 5)
(8, 13) (10, 15)
(11, 12)
(14, 17)
(21, 28)(15, 22) (17, 18)
2 4
3
11
10
8
14
17
15 21
28
28
28
15
5 15
15
15
Store intervals as points in sortedx-order in a leaf search tree.Store max y-coordinates at internalnodes.
Leaf-search tree on x-coordinates of points
Max-tournament tree on y-coordinates of points
2822

11
Interval Search
Interval-Search(T, i)
/* Find an interval in tree T that overlaps i */
1 P = root[T]
2 while p is not a leaf do
3 if max-y[left[p]] low[i]
4 then p = left[p]
5 else p = right[p]
/* Now p is a leaf storing interval i’ */
6 If (i and i’ overlap) then return “found” else return “not found”

12
Correctness Proof
Case 1: We go right, low[i] > max-y[left[p]]
i
Intervals in left subtree of p
None of them can overlap with i.

13
Correctness Proof
Case 2: We go left, low[i] ≤ max-y[left[p]]
If T[left[p]] does not contain an interval i‘ that overlaps i, then T[right[p]] cannot contain
such an interval as well!
ii‘
max-y[left[p]]
(Here we utilize the fact that the intervals are sorted according to their x-coordinates!)

14
Interval Tree-Summary
A interval tree for a set of n intervals [l1, r1], …, [ln, rn] on the line is a daynamic max-
augmented range tree for the set of points P = {(l1, r1), …, (ln, rn)}.
Interval trees can be used to carry out the following operations:
Interval-Insert(T, i) inserts the interval i into the tree T
Interval-Delete(T, i) removes the interval i from the tree T
Interval-Search(T, i) returns a pointer to a node storing an interval i‘ that overlaps i, or
NIL if no such interval is stored in T.

15
Examples for Augmenting DS
• Dynamic order statistics: Augmenting binary search trees by size information
• D-dimensional range trees: Recursive construction of (static) d-dim range trees
• Min-augmented dynamic range trees: Augmenting 1-dim range trees by min-
information
• Interval trees
• Priority search trees

16
3-Sided
Range
Queries
Goal: Report all k points in the query range in O(log n + k) time.

17
3-Sided
Range
Queries
Goal: Report all k points in the query range in O(log n + k) time.
Age
Salary
18
Priority
Search
Trees
2 3 4
5 8
11
14
2115 17 33
2 4
3
11
8
5
14
17
15 21
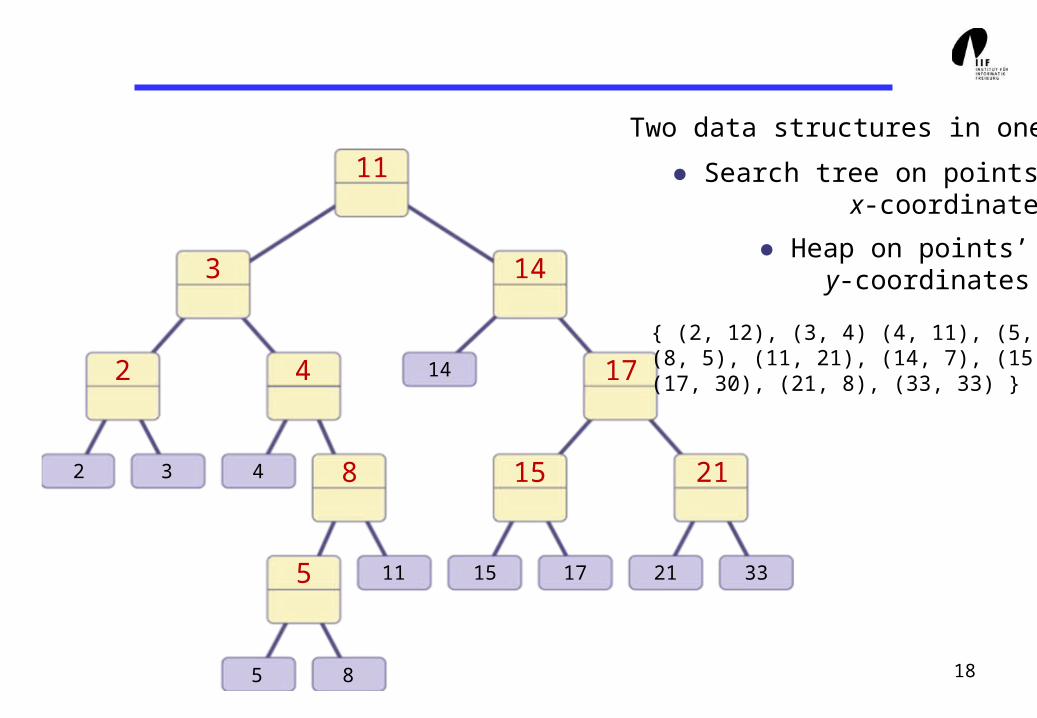
Two data structures in one:
● Search tree on points’x-coordinates
● Heap on points’y-coordinates
{ (2, 12), (3, 4) (4, 11), (5, 3), (8, 5), (11, 21), (14, 7), (15, 2), (17, 30), (21, 8), (33, 33) }

19
Priority
Search
Trees
2 4
5 8
11 2115 17
2 4
3
11
8
5
14
17
15 21
(33, 33)
(17, 30)
(21, 8)
(15, 2)
(11, 21)
(2, 12) (4, 11)
(5, 3)
Two data structures in one:● Search tree on points’
x-coordinates● Heap on points’
y-coordinates
33
3
14
(8, 5)
(14, 7)
(3, 4)

20
• Query procedure:
Inspect all nodes on the two bounding paths and report the points that match the query.
For every tree between the two bounding paths, apply the following strategy:
• Inspect the root.
• If this reports a point, recursively visit the children of the root.
3-Sided
Range
Queries
on
a
Priority
Search
Tree
O(log n) time to query red pathsO(log n + k) time to query blue subtrees

21
• O
b
s
e
r
v
a
t
i
o
n
s
:
• W
e
n
e
v
e
r
r
e
p
o
r
t
a
p
o
i
n
t
t
h
a
t
i
s
n
o
t
i
n
t
h
e
q
u
e
r
y
r
a
n
g
e
.
• P
o
i
n
t
s
i
n
t
h
e
y
e
l
l
o
w
s
u
b
t
r
e
e
s
c
a
n
n
o
t
m
a
t
c
h
t
h
e
q
u
e
r
y
.
• P
o
i
n
t
s
i
n
t
h
e
b
l
u
e
s
u
b
t
r
e
e
s
t
h
a
t
a
r
e
n
o
t
r
e
p
o
r
t
e
d
c
a
n
n
o
t
m
a
t
c
h
t
h
e
q
u
e
r
y
.
Correctness of the
Query
Procedure

22
Insertion into a
Priority
Search
Tree
Insertion procedure:
1. Insert new leaf based onpoint’s x-coordinate.
2. Insert point downthe tree, based on
its y-coordinate.
2 4
5 8
11 2115 17
2 4
3
11
8
5
14
17
15 21
(33, 33)
(17, 30)
(21, 8)
(15, 2)
(11, 21)
(2, 12) (4, 11)
(5, 3)
33
3
14
(8, 5)
(14, 7)
(3, 4)
23
Deletion from a
Priority
Search
Tree
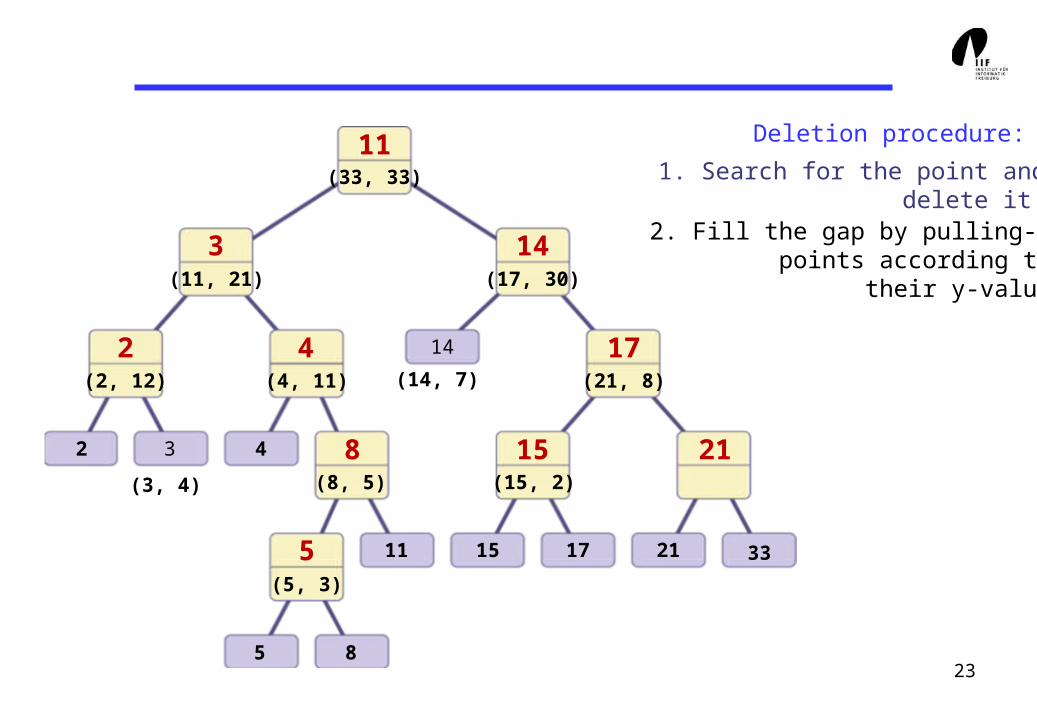
Deletion procedure:
1. Search for the point anddelete it.
2. Fill the gap by pulling-uppoints according to
their y-values
2 4
5 8
11 2115 17
2 4
3
11
8
5
14
17
15 21
(33, 33)
(17, 30)
(21, 8)
(15, 2)
(11, 21)
(2, 12) (4, 11)
(5, 3)
33
3
14
(8, 5)
(14, 7)
(3, 4)

24
Priority Search Tress: Observations
Insertion and deletion of point in a priority search tree T of n nodes can be carried out
in time O(height(T)).
Priority search trees support north-grounded range reporting, if the heap-structure is a
max-heap, and they support south-grounded range reporting, if the heap-structure
is a min-heap.
Maintaining the height of the leaf search tree underlying a priority search tree such
that the height is always of order O(log n) for a priority search tree storing n nodes
requires rebalancing!
In order to obtain O(log n) algorithms for insertion and deletion of points one must use
a rebalancing scheme with constant restructuring cost per update!
A PST storing n points requires space O(N).

25
Rotations in a
Priority
Search
Tree
p1
p2
p1
?
• Push p2 to the appropriate child of y.
• Store p1 at y.
• Propagate the point with maximal y-coordinate from the appropriate child of x.
x
y
y
x

26
Priority
Search
Trees
—
Summary
Theorem: There exists a data structure to represent a dynamically changing set S of points in two dimensions with the following properties:
• The data structure can be updated in O (log n) time after every insertion or deletion into or from S.
• The data structure allows us to answer 3-sided range queries in O (log n + k) time.
• The data structure occupies O (n) space.





























