Embed Size (px)
Citation preview
Architectures and Applications for Architectures and Applications for Wireless Sensor Networks Wireless Sensor Networks
(01204525)(01204525)
Sensor Node Programming IISensor Node Programming II(UART and Radio)(UART and Radio)
Chaiporn [email protected]
Department of Computer EngineeringKasetsart University
2
OutlineOutline UART communicationUART communication Single-hop radio communicationSingle-hop radio communication
3
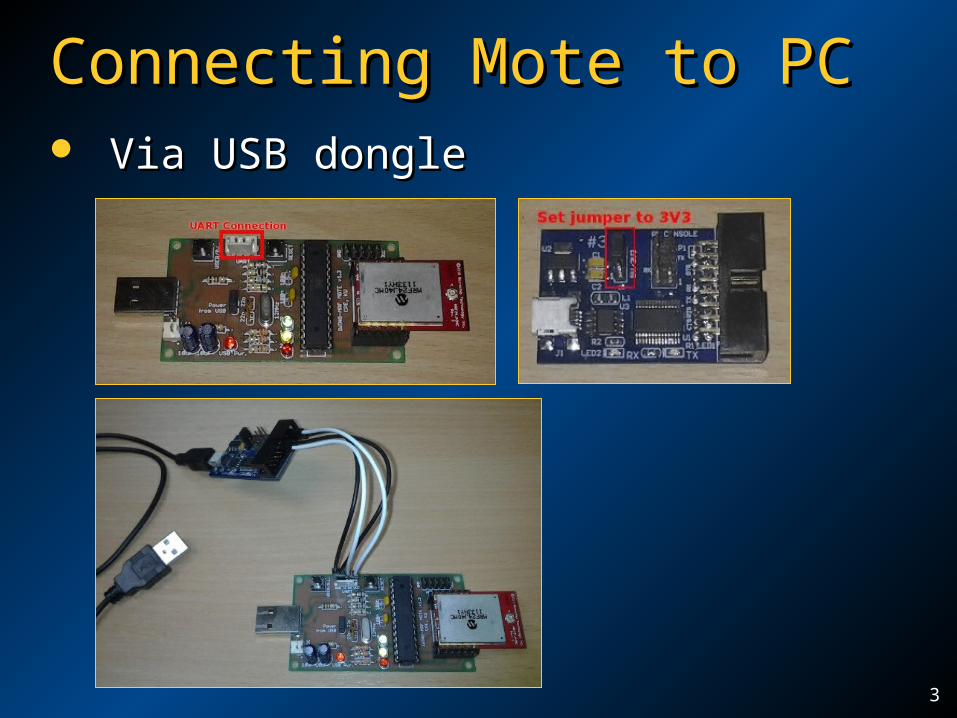
Connecting Mote to PCConnecting Mote to PC Via USB dongleVia USB dongle
4
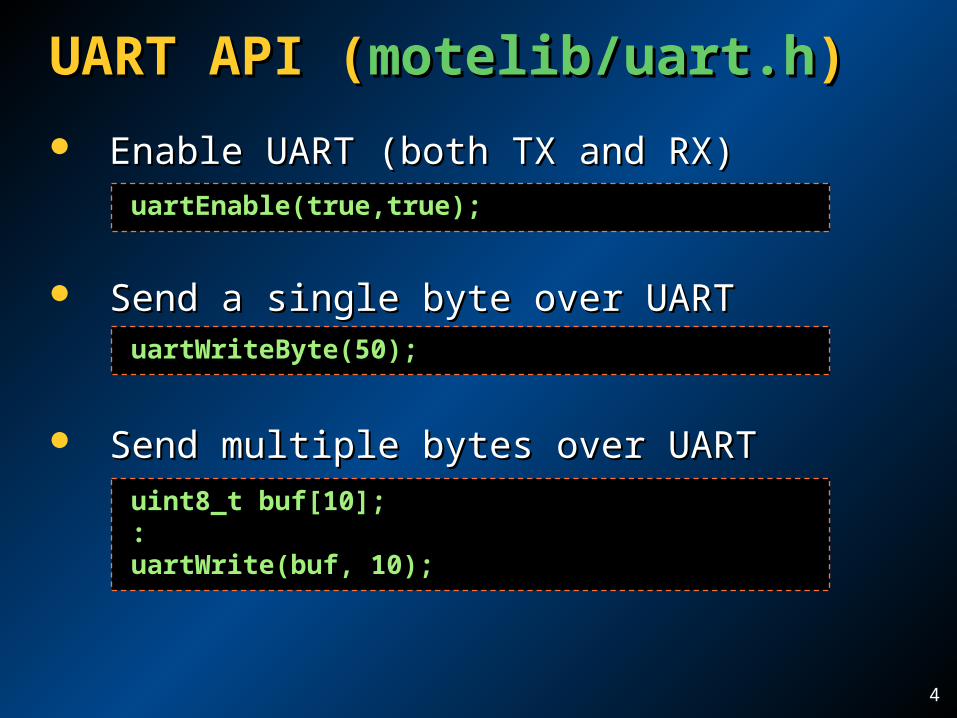
UART API (UART API (motelib/uart.hmotelib/uart.h))
Enable UART (both TX and RX)Enable UART (both TX and RX)
Send a single byte over UARTSend a single byte over UART
Send multiple bytes over UARTSend multiple bytes over UART
uartEnable(true,true);
uint8_t buf[10];:uartWrite(buf, 10);
uartWriteByte(50);
5
UART API (cont'd)UART API (cont'd) Check whether there is any data Check whether there is any data
received from UARTreceived from UART
Read a single byte from UART input Read a single byte from UART input bufferbuffer
Send formatted string over UART Send formatted string over UART using Standard I/O libraryusing Standard I/O library
uint8_t byte = uartReadByte();
#include <stdio.h>::printf("Hello, world\n");printf("i = %d\n", i);
if (uartInputLen() > 0) ...
6
Processing UART Data on Processing UART Data on PCPC Locate UART device fileLocate UART device file
Run Run dmesgdmesg to find out to find out Usually Usually /dev/ttyUSB0 /dev/ttyUSB0 oror /dev/ttyACM0 /dev/ttyACM0
For textual dataFor textual data Run terminal program such as Run terminal program such as screenscreen, ,
gtk-termgtk-term, , puttyputty on UART device on UART device For binary dataFor binary data
Any UART library can be usedAny UART library can be used E.g., Python's E.g., Python's serialserial package package
$ dmesg :[70063.712091] usb 4-1: new low speed USB device using uhci_hcd and ..[70063.871042] usb 4-1: config 1 interface 1 altsetting ..[70063.871056] usb 4-1: config 1 interface 1 altsetting ..[70063.895220] cdc_acm 4-1:1.0: ttyACM0: USB ACM device
7
USB-UART ImplementationUSB-UART Implementation MoteLib provides UART-via-USB MoteLib provides UART-via-USB
implementation (>= rev. 388)implementation (>= rev. 388) Emulated using V-USB library by Emulated using V-USB library by
Objective DevelopmentObjective Development Based on AVR-CDC project (Based on AVR-CDC project (
http://www.recursion.jp/avrcdc/http://www.recursion.jp/avrcdc/) ) Requires no USB dongleRequires no USB dongle Build your app with Build your app with UART_VIA_USB=1UART_VIA_USB=1
$ make UART_VIA_USB=1 ...
8
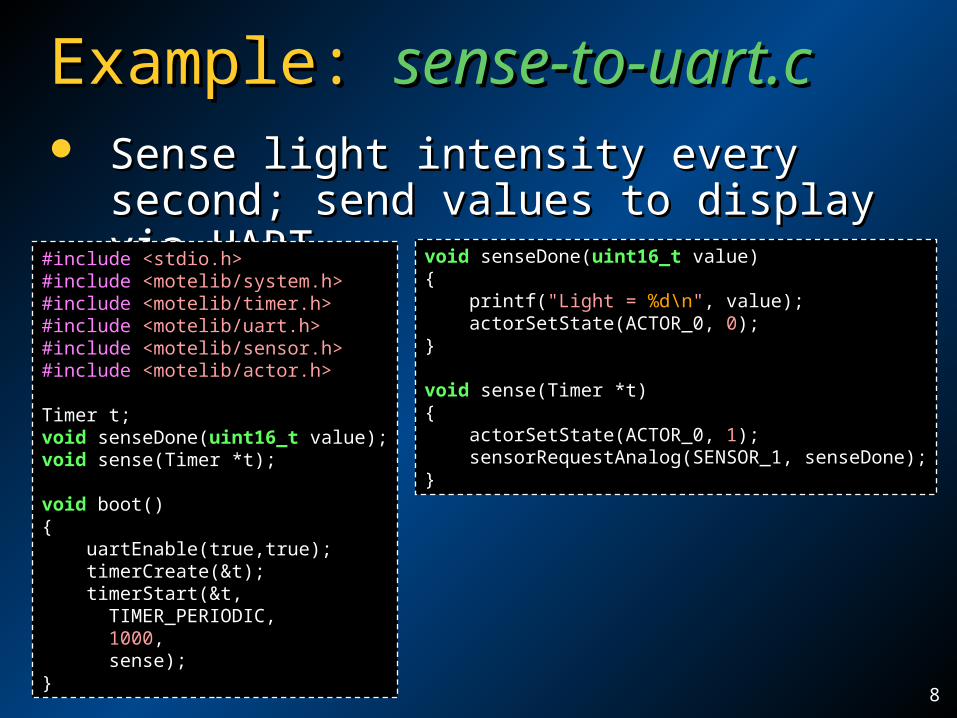
Example: Example: sense-to-uart.csense-to-uart.c Sense light intensity every second; Sense light intensity every second;
send values to display via UARTsend values to display via UART#include <stdio.h>#include <motelib/system.h>#include <motelib/timer.h>#include <motelib/uart.h>#include <motelib/sensor.h>#include <motelib/actor.h>
Timer t;void senseDone(uint16_t value);void sense(Timer *t);
void boot(){ uartEnable(true,true); timerCreate(&t); timerStart(&t, TIMER_PERIODIC, 1000, sense);}
void senseDone(uint16_t value){ printf("Light = %d\n", value); actorSetState(ACTOR_0, 0);}
void sense(Timer *t){ actorSetState(ACTOR_0, 1); sensorRequestAnalog(SENSOR_1, senseDone);}
9
Testing Testing sense-to-uartsense-to-uart Build with UART_VIA_USB optionBuild with UART_VIA_USB option
Capture UART output using Capture UART output using screenscreen (or (or gtk-termgtk-term or or puttyputty))
$ make UART_VIA_USB=1 flash
$ screen /dev/ttyACM0
10
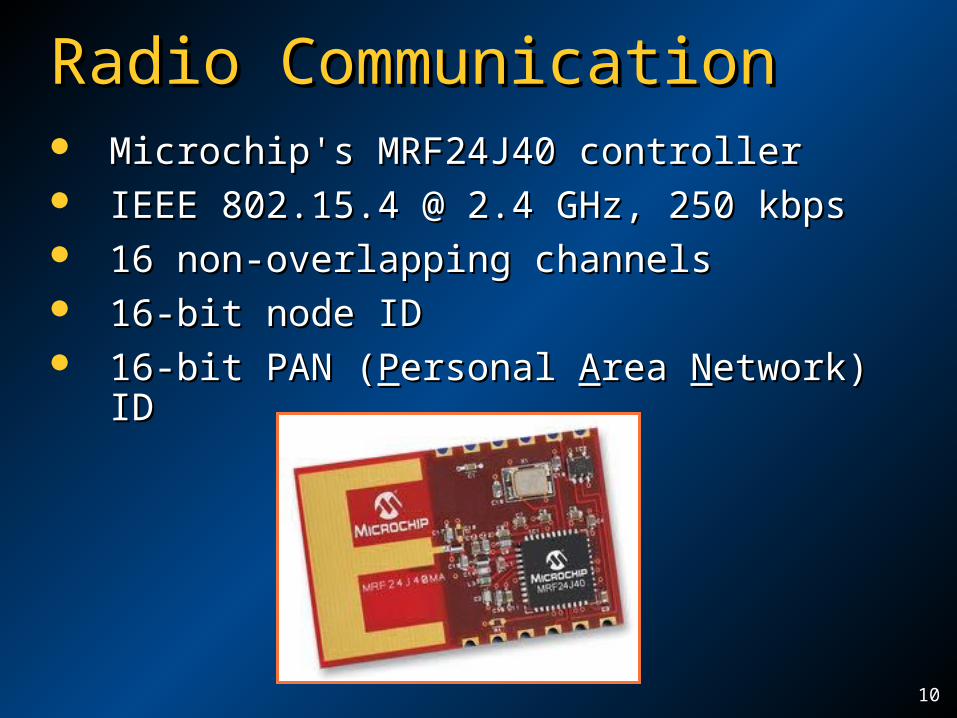
Radio CommunicationRadio Communication Microchip's MRF24J40 controllerMicrochip's MRF24J40 controller IEEE 802.15.4 @ 2.4 GHz, 250 kbpsIEEE 802.15.4 @ 2.4 GHz, 250 kbps 16 non-overlapping channels16 non-overlapping channels 16-bit node ID16-bit node ID 16-bit PAN (16-bit PAN (PPersonal ersonal AArea rea NNetwork) IDetwork) ID
11
Configuring RadioConfiguring Radio Use Use config-mote.pyconfig-mote.py script located script located
in in $MOTELIB_DIR/platforms/iwing-$MOTELIB_DIR/platforms/iwing-mrf/toolsmrf/tools
Have mote enter bootloader, then Have mote enter bootloader, then run:run:
E.g., set address to 234 and PAN ID E.g., set address to 234 and PAN ID to 555to 555
Set channel to 0x1ASet channel to 0x1A
$ cd $MOTELIB_DIR/platforms/iwing-mrf/tools$ ./config-mote.py
$ ./config-mote.py --address 234 --panid 555
$ ./config-mote.py --channel 0x1A
12
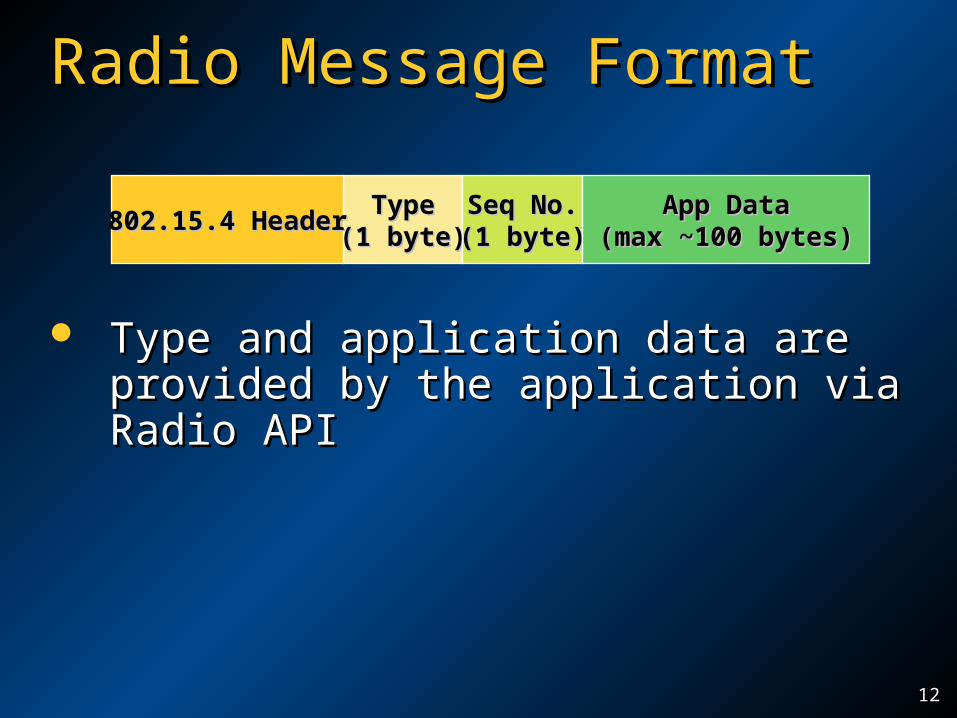
Radio Message FormatRadio Message Format
Type and application data are Type and application data are provided by the application via Radio provided by the application via Radio APIAPI
TypeType(1 byte)(1 byte)802.15.4 Header802.15.4 Header Seq No.Seq No.
(1 byte)(1 byte)App DataApp Data
(max ~100 bytes)(max ~100 bytes)
13
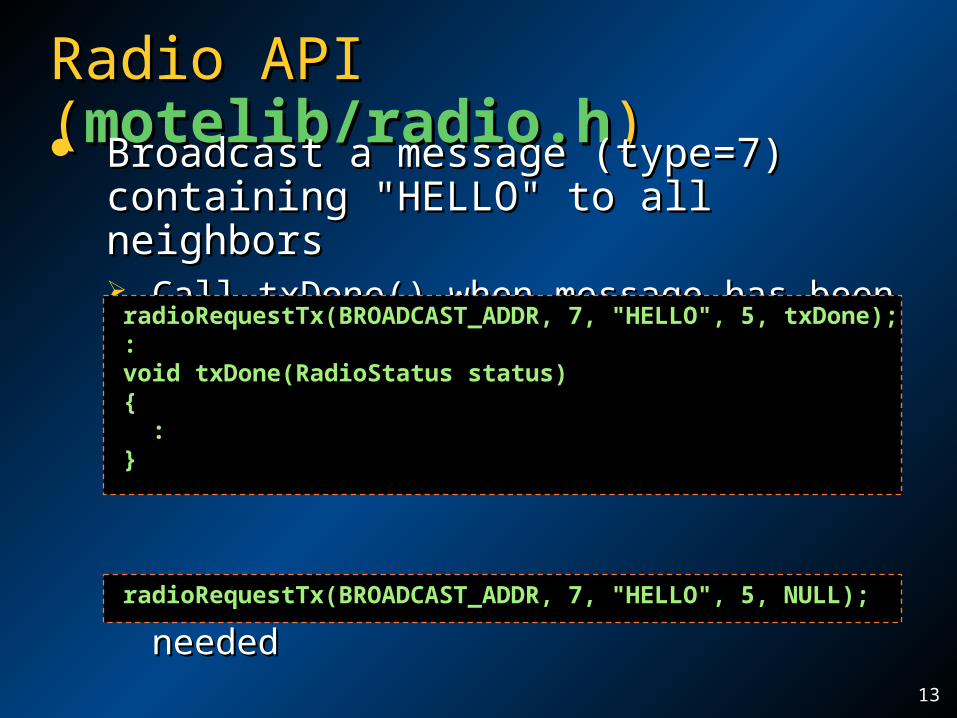
Radio API Radio API ((motelib/radio.hmotelib/radio.h)) Broadcast a message (type=7) Broadcast a message (type=7)
containing "HELLO" to all neighborscontaining "HELLO" to all neighbors Call txDone() when message has been Call txDone() when message has been
sentsent
Use NULL when callback is not neededUse NULL when callback is not needed
radioRequestTx(BROADCAST_ADDR, 7, "HELLO", 5, txDone);:void txDone(RadioStatus status){ :}
radioRequestTx(BROADCAST_ADDR, 7, "HELLO", 5, NULL);
14
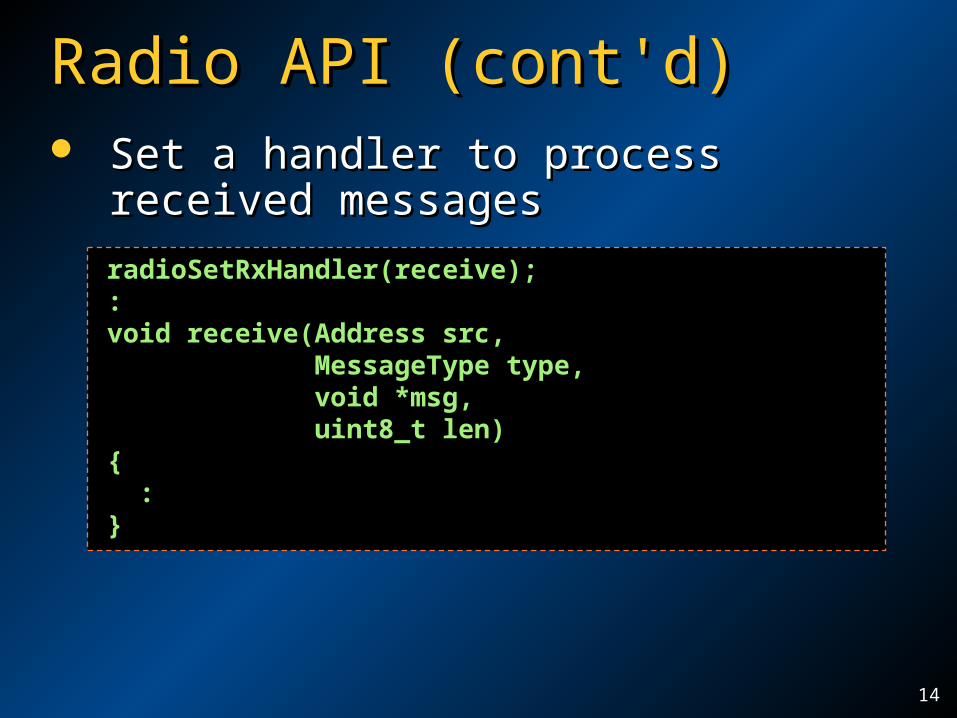
Radio API (cont'd)Radio API (cont'd) Set a handler to process received Set a handler to process received
messagesmessages
radioSetRxHandler(receive);:void receive(Address src, MessageType type, void *msg, uint8_t len){ :}
15
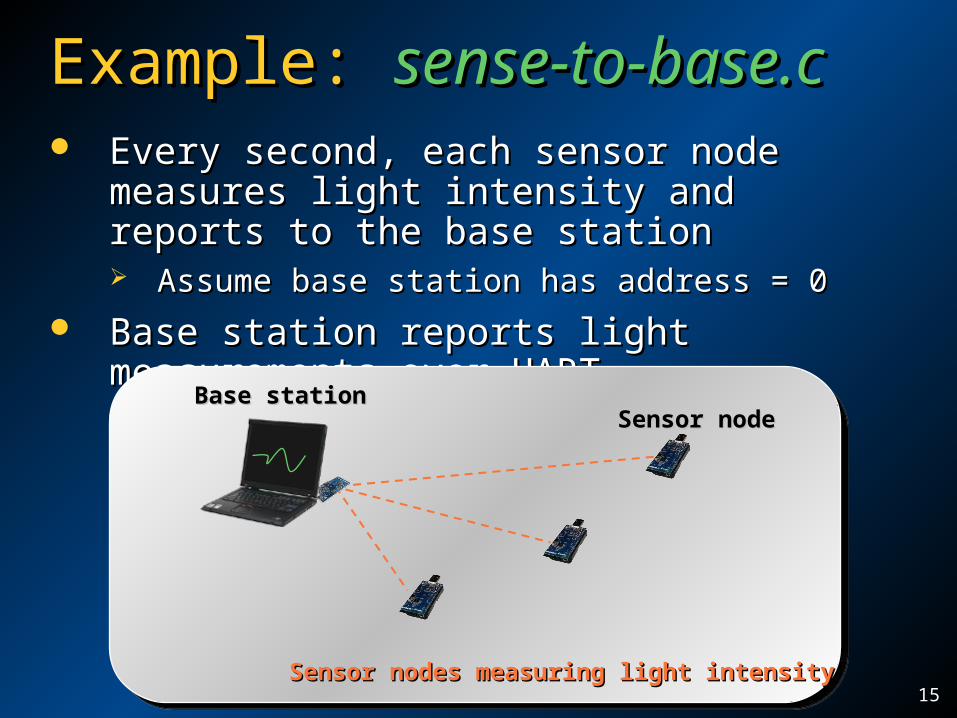
Example: Example: sense-to-base.csense-to-base.c Every second, each sensor node measures Every second, each sensor node measures
light intensity and reports to the base light intensity and reports to the base stationstation Assume base station has address = 0Assume base station has address = 0
Base station reports light measurements Base station reports light measurements over UARTover UART
Base stationBase station
Sensor nodes measuring light intensitySensor nodes measuring light intensity
Sensor nodeSensor node
16
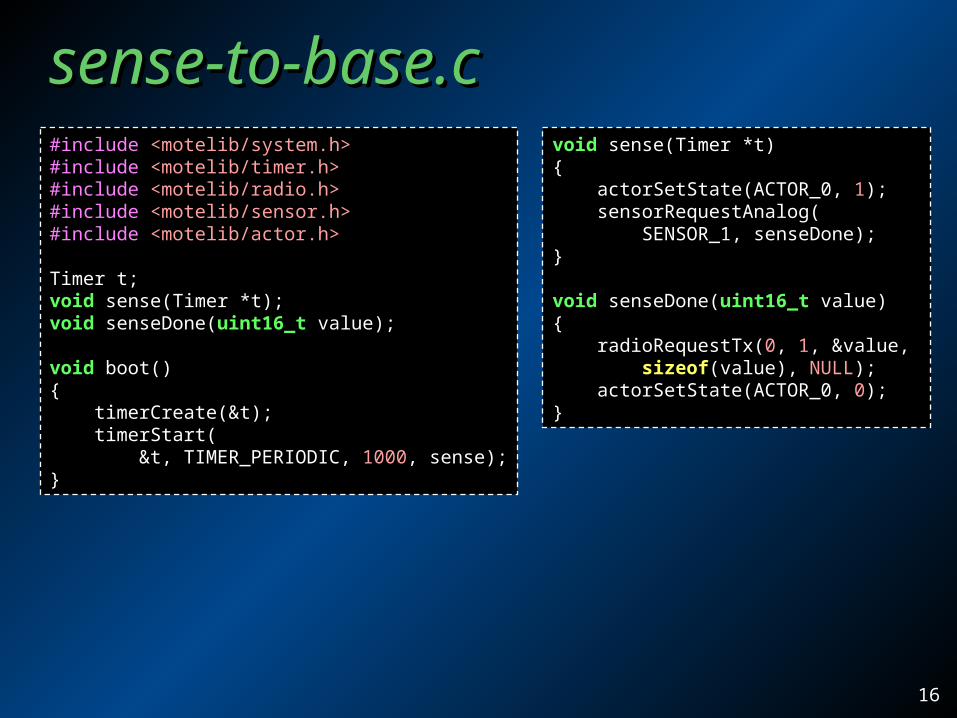
sense-to-base.csense-to-base.cvoid sense(Timer *t){ actorSetState(ACTOR_0, 1); sensorRequestAnalog( SENSOR_1, senseDone);}
void senseDone(uint16_t value){ radioRequestTx(0, 1, &value, sizeof(value), NULL); actorSetState(ACTOR_0, 0);}
#include <motelib/system.h>#include <motelib/timer.h>#include <motelib/radio.h>#include <motelib/sensor.h>#include <motelib/actor.h>
Timer t;void sense(Timer *t);void senseDone(uint16_t value);
void boot(){ timerCreate(&t); timerStart( &t, TIMER_PERIODIC, 1000, sense);}
17
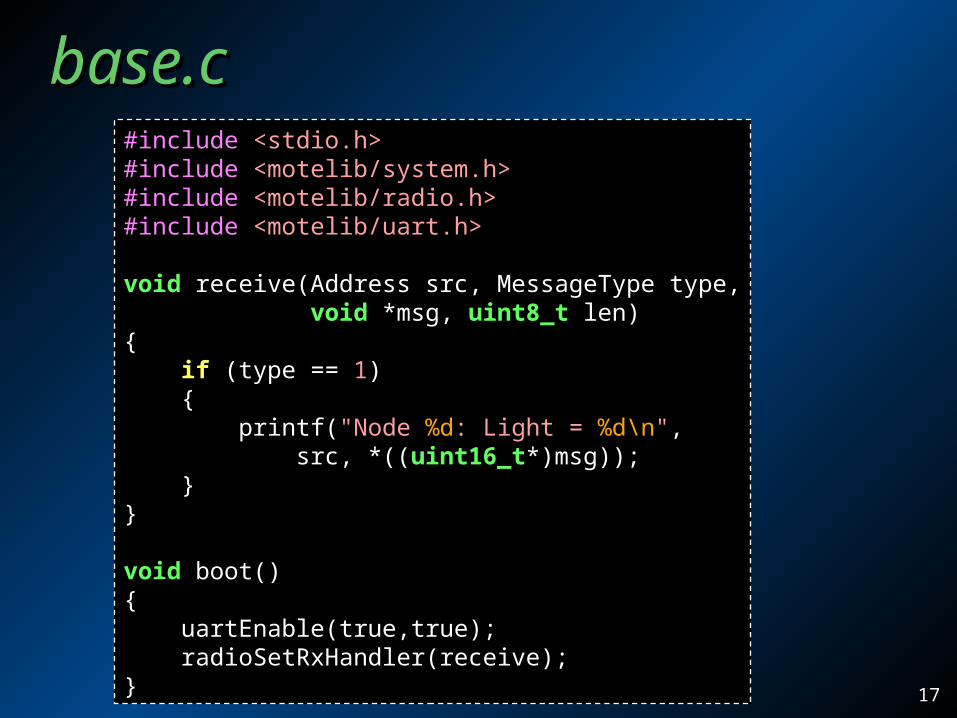
base.cbase.c#include <stdio.h>#include <motelib/system.h>#include <motelib/radio.h>#include <motelib/uart.h>
void receive(Address src, MessageType type, void *msg, uint8_t len){ if (type == 1) { printf("Node %d: Light = %d\n", src, *((uint16_t*)msg)); }}
void boot(){ uartEnable(true,true); radioSetRxHandler(receive);}
18
Exercise: Exercise: Voting MachineVoting Machine Create an application for wireless Create an application for wireless
voting machinevoting machine Allow user to cast a vote using the USER Allow user to cast a vote using the USER
buttonbutton Voting choices are: Voting choices are: Red (1)Red (1), , Yellow (2)Yellow (2), ,
Green (3)Green (3), or No Vote (0), or No Vote (0) When the USER button is pressed, When the USER button is pressed,
Set LED status accordinglySet LED status accordingly Report current vote to the base station (#1) Report current vote to the base station (#1)
with message type 50with message type 50





























