Embed Size (px)
Citation preview

Approximation Techniques bounded inference
COMPSCI 276Fall 2007

SP2 2
Approximate Inference Metrics of evaluation Absolute error: give e>0 and a query
p= P(x|e), an estimate r has absolute error e iff |p-r|<e
Relative error: the ratio r/p in [1-e,1+e].
Dagum and Luby 1993: approximation up to a relative error is NP-hard.
Absolute error is also NP-hard if error is less than .5

SP2 3
Mini-buckets: “local inference”
Computation in a bucket is time and space exponential in the number of variables involved
Therefore, partition functions in a bucket into “mini-buckets” on smaller number of variables
(The idea is similar to i-consistency: bound the size of recorded dependencies, Dechter 2003)

SP2 4
Mini-bucket approximation: MPE task
Split a bucket into mini-buckets =>bound complexity
XX gh )()()O(e :decrease complexity lExponentia n rnr eOeO

SP2 55
Mini-Bucket Elimination
bucket A:
bucket E:
bucket D:
bucket C:
bucket B:
minBΣ
F(a,b)
F(a,d)
hE(a)
hB(a,c)
hB(d,e)
F(b,d) F(b,e)
F(c,e) F(a,c)
hC(e,a)
L = lower bound
Mini-buckets
A
B C
D E
F(b,c)
e = 0 hD(e,a)
minBΣ

SP2 66
Semantics of Mini-Bucket: Splitting a Node
U UÛ
Before Splitting:Network N
After Splitting:Network N'
Variables in different buckets are renamed and duplicated (Kask et. al., 2001), (Geffner et. al., 2007), (Choi, Chavira, Darwiche , 2007)

SP2 7
Approx-mpe(i) Input: i – max number of variables allowed in a mini-bucket Output: [lower bound (P of a sub-optimal solution), upper bound]
Example: approx-mpe(3) versus elim-mpe
2* w 4* w

SP2 8
MBE(i,m), (MBE(i) (also, approx-mpe)
Input: Belief network (P1,…Pn) Output: upper and lower bounds Initialize: (put functions in buckets) Process each bucket from p=n to 1
Create (i,m)-mini-buckets Process each mini-bucket
(For mpe): assign values in ordering d Return: mpe-tuple, upper and lower
bounds

SP2 9
Properties of approx-mpe(i) Complexity: O(exp(2i)) time and O(exp(i)) space.
Accuracy: determined by upper/lower (U/L) bound.
As i increases, both accuracy and complexity increase.
Possible use of mini-bucket approximations: As anytime algorithms (Dechter and Rish, 1997) As heuristics in best-first search (Kask and Dechter,
1999)
Other tasks: similar mini-bucket approximations for: belief updating, MAP and MEU (Dechter and Rish, 1997)

SP2 10
Anytime Approximation
UL
L
U
mpe(i)-approxL mpe(i)-approxU
iii
ii
step
smallest theand largest the
solution return ,11
far so found solutionbest thekeepby computed boundlower by computed boundupper
available are resources space and time
0
returnend
if
While :Initialize
)mpe(-anytime
SP2 11
Bounded Inference for belief updating Idea mini-bucket is the same:
So we can apply a sum in each mini-bucket, or better, one sum and the rest max, or min (for lower-bound)
Approx-bel-max(i,m) generating upper and lower-bound on beliefs approximates elim-bel
Approx-map(i,m): max buckets will be maximized, sum buckets will be sum-max. Approximates elim-map.
)(max)()()(
)()()()(
Xgxfxgxf
xgxfxgxf
XX X
X X X

SP2 12
Empirical Evaluation(Dechter and Rish, 1997; Rish thesis, 1999)
Randomly generated networks Uniform random probabilities Random noisy-OR
CPCS networks Probabilistic decoding
Comparing approx-mpe and anytime-mpe
versus elim-mpe
SP2 13
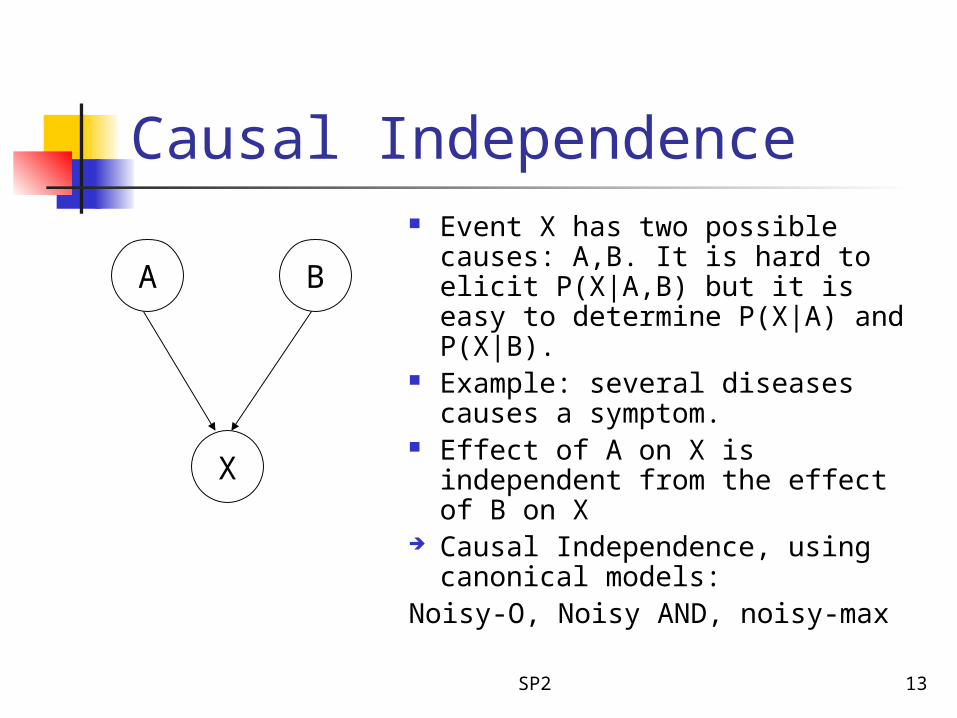
Causal Independence Event X has two possible
causes: A,B. It is hard to elicit P(X|A,B) but it is easy to determine P(X|A) and P(X|B).
Example: several diseases causes a symptom.
Effect of A on X is independent from the effect of B on X
Causal Independence, using canonical models:
Noisy-O, Noisy AND, noisy-max
A B
X

SP2 14
Binary ORA B
X
A B P(X=0|A,B)0 0 1
P(X=1|A,B)0
0 1 0 11 0 0 11 1 0 1

SP2 15
Noisy-OR“noise” is associated with each
edgedescribed by noise parameter
[0,1] :Let q b=0.2, qa =0.1
P(x=0|a,b)= (1-a) (1-b)
P(x=1|a,b)=1-(1-a) (1-b)
A B
X
A B P(X=0|A,B)0 0 1
P(X=1|A,B)0
a b
0 1 0.1 0.91 0 0.2 0.81 1 0.02 0.98
qi=P(X=0|A_i=1,…else =0)

SP2 16
Closed Form Bel(X) - 1
u
u
Tii
Tii
xifq
xifq
xP11
0
)u|(
Given: noisy-or CPT P(x|u)
noise parameters i
Tu = {i: Ui = 1}Define:
qi = 1 - I
Then:

SP2 17
Closed Form Bel(X) - 2Using Iterative Belief Propagation:
k
kxu i
i uqxxBEL )()()()u|(
u
u
Ti kkxi
u
Ti kkxi
u
xifuq
xifuq
xBEL1)()1(
0)(
)u|(1
0
Set piix = pix (uk=1). Then we can show that:
1)1(1
0)1(
)u|(1
0
xif
xif
xBEL
iixi
iixi
SP2 18
Methodology for Empirical Evakuation (for mpe) U/L –accuracy Better (U/mpe) or mpe/L Benchmarks: Random networks
Given n,e,v generate a random DAG For xi and parents generate table from
uniform [0,1], or noisy-or Create k instances. For each generate
random evidence, likely evidence Measure averages
SP2 19
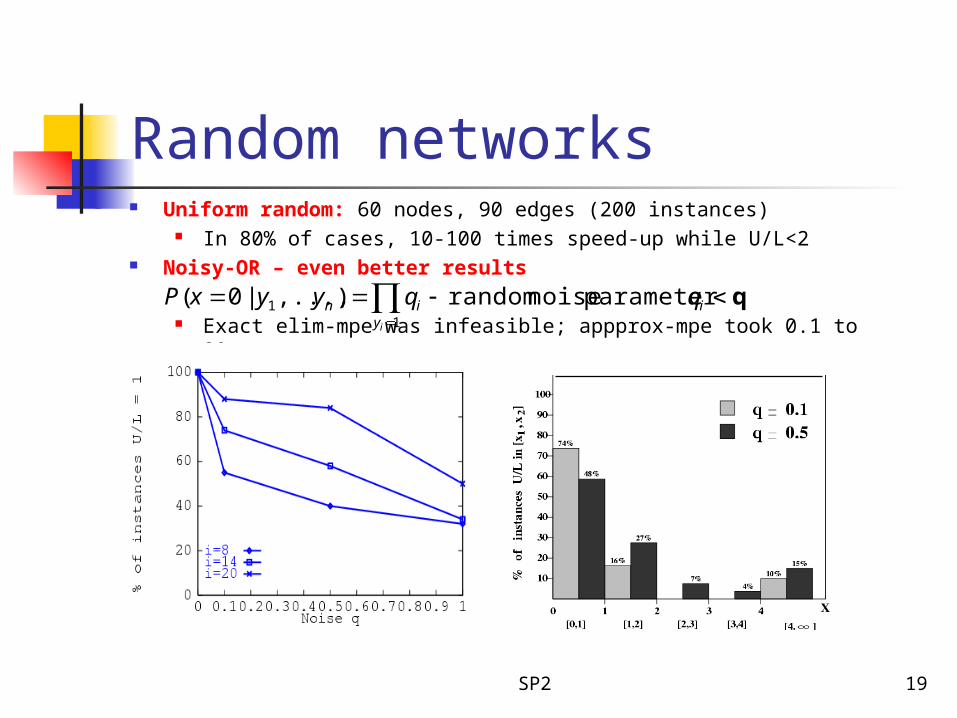
Random networks Uniform random: 60 nodes, 90 edges (200 instances)
In 80% of cases, 10-100 times speed-up while U/L<2 Noisy-OR – even better results
Exact elim-mpe was infeasible; appprox-mpe took 0.1 to 80 sec.
q
iy
in qqyyxPi
parameter noise random),...,|0(1
1

SP2 20
Anytime-mpe(0.0001) U/L error vs time
Time and parameter i
1 10 100 1000
Up
pe
r/L
ow
er
0.6
1.0
1.4
1.8
2.2
2.6
3.0
3.4
3.8 cpcs422b cpcs360b
i=1 i=21
CPCS networks – medical diagnosis(noisy-OR model)
Test case: no evidence
505.2 70.3anytime-mpe( ),
110.5 70.3anytime-mpe( ),
1697.6 115.8elim-mpe
cpcs422 cpcs360 AlgorithmTime (sec)
410 110

SP2 21
log(U/L)
0 2 4 6 8 10 12 0
100
200
300
400
500
600
700
800
900
1000
Freq
uenc
y
log(U/L) histogram for i=10 on 1000 instances of random evidence
log(U/L) histogram for i=10 on 1000 instances of likely evidence
log(U/L)
0 1 2 3 4 5 6 7 8 9 10 11 12 0
100
200
300
400
500
600
700
800
900
1000
Freq
uenc
y
The effect of evidence
More likely evidence=>higher MPE => higher accuracy (why?)
Likely evidence versus random (unlikely) evidence

SP2 22
Probabilistic decodingError-correcting linear block code
State-of-the-art: approximate algorithm – iterative belief propagation (IBP) (Pearl’s poly-tree algorithm applied to loopy networks)

SP2 23
Iterative Belief Proapagation
Belief propagation is exact for poly-trees IBP - applying BP iteratively to cyclic
networks
No guarantees for convergence Works well for many coding networks
)( 11uX
1U 2U 3U
2X1X
)( 12xU
)( 12uX
)( 13xU
) BEL(U update :step One
1

SP2 24
approx-mpe vs. IBPcodes *w-low onbetter is mpe-approx
codes w*)-(high generatedrandomly onbetter is IBP
Bit error rate (BER) as a function of noise (sigma):

SP2 25
Mini-buckets: summary Mini-buckets – local inference approximation
Idea: bound size of recorded functions
Approx-mpe(i) - mini-bucket algorithm for MPE Better results for noisy-OR than for random
problems Accuracy increases with decreasing noise in
coding Accuracy increases for likely evidence Sparser graphs -> higher accuracy Coding networks: approx-mpe outperfroms IBP on
low-induced width codes

SP2 26
Cluster Tree Elimination - properties Correctness and completeness: Algorithm CTE is
correct, i.e. it computes the exact joint probability of a single variable and the evidence.
Time complexity: O ( deg (n+N) d w*+1 )
Space complexity: O ( N d sep)where deg = the maximum degree of a node
n = number of variables (= number of CPTs)N = number of nodes in the tree
decompositiond = the maximum domain size of a variablew* = the induced widthsep = the separator size

SP2 27
Cluster Tree Elimination - the messages
),|()|()(),()2,1( bacpabpapcbha
A B C p(a), p(b|a), p(c|a,b)
B C D Fp(d|b), p(f|c,d)
h(1,2)(b,c)
B E Fp(e|b,f), h(2,3)(b,f)
E F Gp(g|e,f)
),(),|()|(),( )2,1(,
)3,2( cbhdcfpbdpfbhdc
2
4
1
3
EF
BC
BFsep(2,3)={B,F}
elim(2,3)={C,D}

SP2 28
Mini-Clustering for belief updating Motivation:
Time and space complexity of Cluster Tree Elimination depend on the induced width w* of the problem
When the induced width w* is big, CTE algorithm becomes infeasible
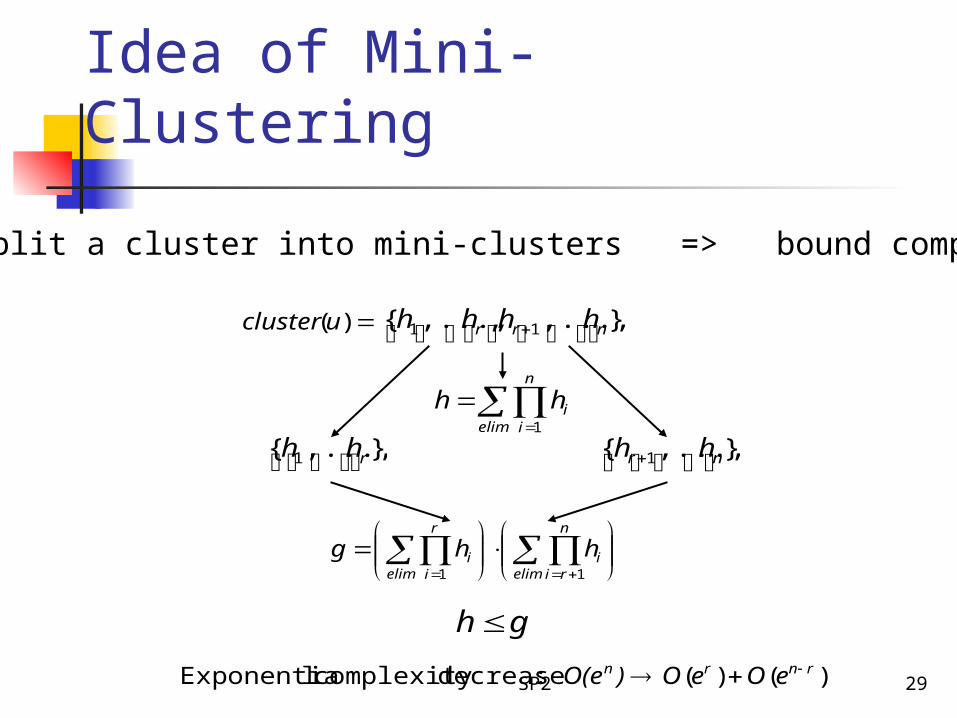
The basic idea: Try to reduce the size of the cluster (the exponent);
partition each cluster into mini-clusters with less variables Accuracy parameter i = maximum number of variables in a
mini-cluster The idea was explored for variable elimination (Mini-
Bucket)
SP2 29
Idea of Mini-Clustering
Split a cluster into mini-clusters => bound complexity
)()( :decrease complexity lExponentia rnrn eOeO)O(e
},...,,,...,{ 11 nrr hhhh )(ucluster
elim
n
iihh
1
},...,{ 1 rhh },...,{ 1 nr hh
elim
n
rii
elim
r
ii hhg
11
gh

SP2 30
Mini-Clustering - MC
),|()|()(),(1)2,1( bacpabpapcbh
a
A B C p(a), p(b|a), p(c|a,b)
B E Fp(e|b,f)
E F Gp(g|e,f)
2
4
1
3
EF
BC
BF
dc
dcfpfh,
2)3,2( ),|()(
),()|()( 1)2,1(
,
1)3,2( cbhbdpbh
dc
dc
dcfpcbhbdpfbh,
1)2,1()3,2( ),|(),()|(),(
),|()|()(),()2,1( bacpabpapcbha
Cluster Tree Elimination Mini-Clustering, i=3
G
E
F
C D
B
A
B C D Fp(d|b), p(f|c,d)2
B C D Fp(d|b), h(1,2)(b,c), p(f|c,d)
sep(2,3) = {B,F}elim(2,3) = {C,D}
B C D C D FC D F p(d|b), h(1,2)(b,c) p(f|c,d)p(f|c,d)

SP2 31
Mini-Clustering - the messages, i=3
),|()|()(),(1)2,1( bacpabpapcbh
a
A B C p(a), p(b|a), p(c|a,b)
B C D p(d|b), h(1,2)(b,c)
C D F p(f|c,d)
B E Fp(e|b,f),
h1(2,3)(b), h2
(2,3)(f)
E F Gp(g|e,f)
2
4
1
3
EF
BC
BFsep(2,3)={B,F}
elim(2,3)={C,D} ),|(max)(,
2)3,2( dcfpfh
dc
),()|()( 1)2,1(
,
1)3,2( cbhbdpbh
dc

SP2 32
EF
BF
BC
),|()|()(:),(1)2,1( bacpabpapcbh
a
)2,1(H
),|(max:)(
),()|(:)(
,
2)1,2(
1)2,3(
,
1)1,2(
dcfpch
fbhbdpbh
fd
fd
)1,2(H
),|(max:)(
),()|(:)(
,
2)3,2(
1)2,1(
,
1)3,2(
dcfpfh
cbhbdpbh
dc
dc
)3,2(H
),(),|(:),( 1)3,4(
1)2,3( fehfbepfbh
e
)2,3(H
)()(),|(:),( 2)3,2(
1)3,2(
1)4,3( fhbhfbepfeh
b
)4,3(H
),|(:),(1)3,4( fegGpfeh e)3,4(H
ABC
2
4
1
3 BEF
EFG
BCDF
Mini-Clustering - example

SP2 34
Mini-Clustering
Correctness and completeness: Algorithm MC(i) computes a bound (or an approximation) on the joint probability P(Xi,e) of each variable and each of its values.
Time & space complexity: O(n hw* d i)
where hw* = maxu | {f | f (u) } |

SP2 35
We can replace max operator by
min => lower bound on the joint
mean => approximation of the joint
Lower bounds and mean approximations

SP2 36
MC can compute an (upper) bound on the joint P(Xi,e)
Deriving a bound on the conditional P(Xi|e) is not easy when the exact P(e) is not available
If a lower bound would be available, we could use:
as an upper bound on the posterior
In our experiments we normalized the results and regarded them as approximations of the posterior P(Xi|e)
),( eXP i
)(eP
)(/),( ePeXP i
Normalization

SP2 37
Experimental results
Algorithms: Exact IBP Gibbs sampling (GS) MC with normalization
(approximate)
Networks (all variables are binary):
Coding networks CPCS 54, 360, 422 Grid networks (MxM) Random noisy-OR networks Random networks
Measures: Normalized Hamming
Distance (NHD) BER (Bit Error Rate) Absolute error Relative error Time

SP2 38
Random networks - Absolute error
evidence=0 evidence=10
Random networks, N=50, P=2, k=2, evid=0, w*=10, 50 instances
i-bound
0 2 4 6 8 10
Abs
olut
e er
ror
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.16
MCGibbs SamplingIBP
Random networks, N=50, P=2, k=2, evid=10, w*=10, 50 instances
i-bound
0 2 4 6 8 10
Abs
olut
e er
ror
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.16
MCGibbs SamplingIBP

SP2 39
Noisy-OR networks - Absolute error
Noisy-OR networks, N=50, P=3, evid=10, w*=16, 25 instances
i-bound
0 2 4 6 8 10 12 14 16
Abs
olut
e er
ror
1e-5
1e-4
1e-3
1e-2
1e-1
1e+0
MCIBPGibbs Sampling
Noisy-OR networks, N=50, P=3, evid=20, w*=16, 25 instances
i-bound
0 2 4 6 8 10 12 14 16A
bsol
ute
erro
r1e-5
1e-4
1e-3
1e-2
1e-1
1e+0
MCIBPGibbs Sampling
evidence=10 evidence=20

SP2 40
Grid 15x15 - 10 evidenceGrid 15x15, evid=10, w*=22, 10 instances
i-bound
0 2 4 6 8 10 12 14 16 18
NH
D
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
MCIBP
Grid 15x15, evid=10, w*=22, 10 instances
i-bound
0 2 4 6 8 10 12 14 16 18
Abs
olut
e er
ror
0.00
0.01
0.02
0.03
0.04
0.05
0.06
MCIBP
Grid 15x15, evid=10, w*=22, 10 instances
i-bound
0 2 4 6 8 10 12 14 16 18
Rel
ativ
e er
ror
0.00
0.02
0.04
0.06
0.08
0.10
0.12
MCIBP
Grid 15x15, evid=10, w*=22, 10 instances
i-bound
0 2 4 6 8 10 12 14 16 18
Tim
e (
seco
nd
s)
0
2
4
6
8
10
12
MCIBP
SP2 41
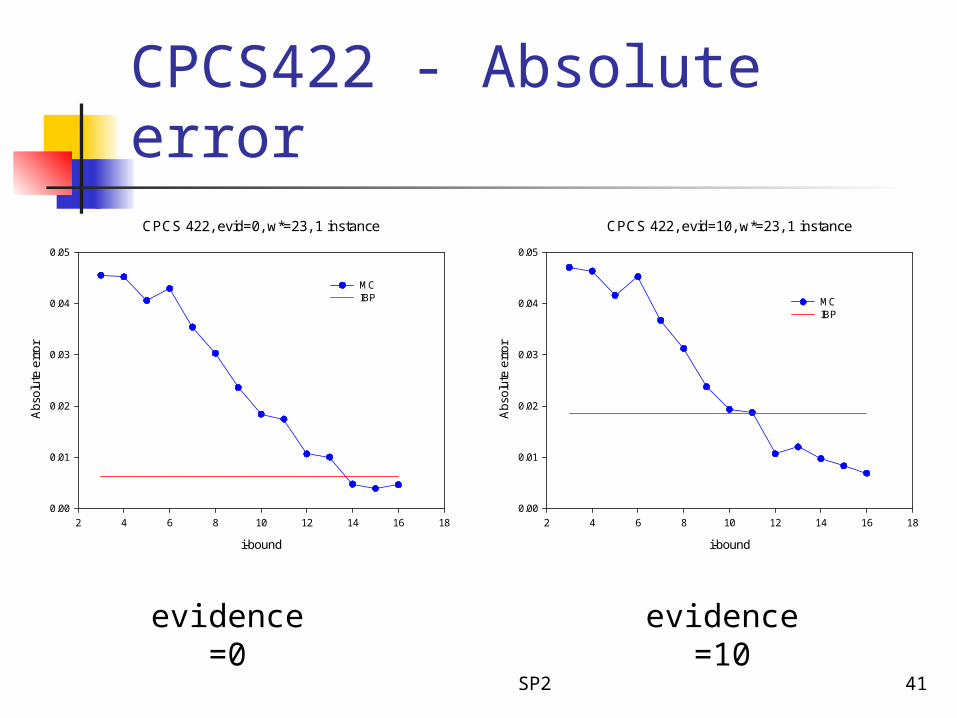
CPCS422 - Absolute error
evidence=0 evidence=10
CPCS 422, evid=0, w*=23, 1 instance
i-bound
2 4 6 8 10 12 14 16 18
Abs
olut
e er
ror
0.00
0.01
0.02
0.03
0.04
0.05
MCIBP
CPCS 422, evid=10, w*=23, 1 instance
i-bound
2 4 6 8 10 12 14 16 18
Abs
olut
e er
ror
0.00
0.01
0.02
0.03
0.04
0.05
MCIBP

SP2 42
Coding networks - Bit Error Rate
sigma=0.22 sigma=.51
Coding networks, N=100, P=4, sigma=.51, w*=12, 50 instances
i-bound
0 2 4 6 8 10 12
Bit
Err
or R
ate
0.06
0.08
0.10
0.12
0.14
0.16
0.18
MCIBP
Coding networks, N=100, P=4, sigma=.22, w*=12, 50 instances
i-bound
0 2 4 6 8 10 12
Bit
Err
or R
ate
0.000
0.001
0.002
0.003
0.004
0.005
0.006
0.007
MCIBP

SP2 43
Mini-Clustering summary
MC extends the partition based approximation from mini-buckets to general tree decompositions for the problem of belief updating
Empirical evaluation demonstrates its effectiveness and superiority (for certain types of problems, with respect to the measures considered) relative to other existing algorithms

SP2 44
What is IJGP?
IJGP is an approximate algorithm for belief updating in Bayesian networks
IJGP is a version of join-tree clustering which is both anytime and iterative
IJGP applies message passing along a join-graph, rather than a join-tree
Empirical evaluation shows that IJGP is almost always superior to other approximate schemes (IBP, MC)
SP2 45
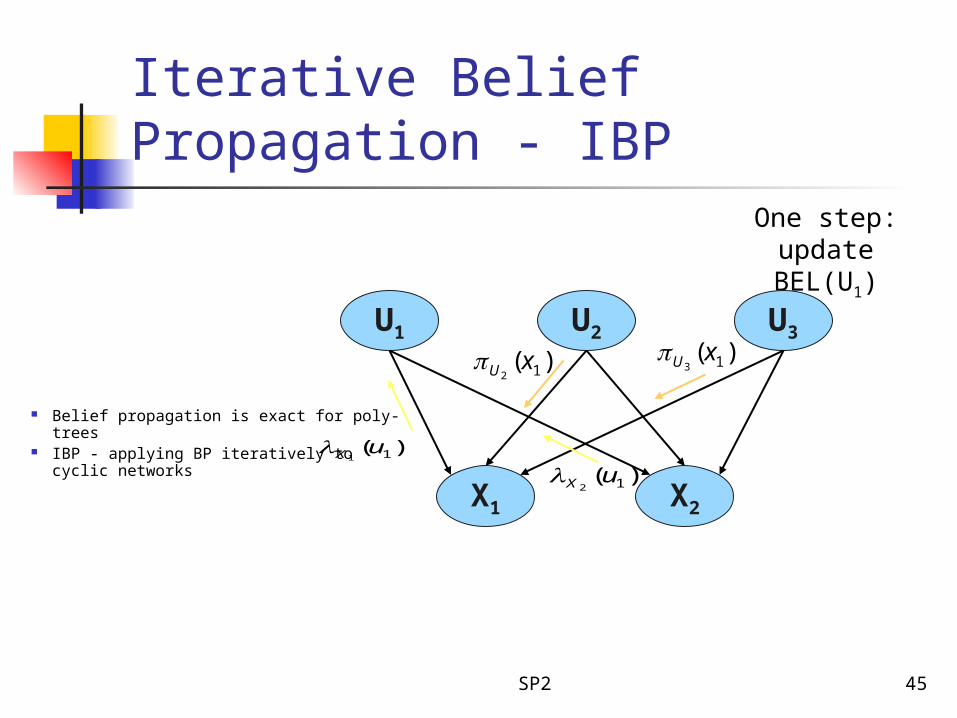
Iterative Belief Propagation - IBP
Belief propagation is exact for poly-trees IBP - applying BP iteratively to cyclic
networks
No guarantees for convergence
Works well for many coding networks
One step:update BEL(U1)
)( 11uX
U1
)( 12xU
)( 12uX
)( 13xU
U2 U3
X2X1

SP2 46
IJGP - Motivation IBP is applied to a loopy network iteratively
not an anytime algorithm when it converges, it converges very fast
MC applies bounded inference along a tree decomposition
MC is an anytime algorithm controlled by i-bound MC converges in two passes up and down the tree
IJGP combines: the iterative feature of IBP the anytime feature of MC

SP2 47
IJGP - The basic idea Apply Cluster Tree Elimination to any join-
graph
We commit to graphs that are minimal I-maps
Avoid cycles as long as I-mapness is not violated
Result: use minimal arc-labeled join-graphs

SP2 48
IJGP - ExampleA
D
I
B
E
J
F
G
C
H
A
ABDE
FGI
ABC
BCE
GHIJ
CDEF
FGH
C
H
A C
A AB BC
BE
C
CDE CE
FH
FFG GH H
GI
a) Belief network a) The graph IBP works on

SP2 49
Arc-minimal join-graphA
ABDE
FGI
ABC
BCE
GHIJ
CDEF
FGH
C
H
A C
A AB BC
BE
C
CDE CE
FH
FFG GH H
GI
A
ABDE
FGI
ABC
BCE
GHIJ
CDEF
FGH
C
H
A
AB BC
CDE CE
H
FFG GH
GI
SP2 50
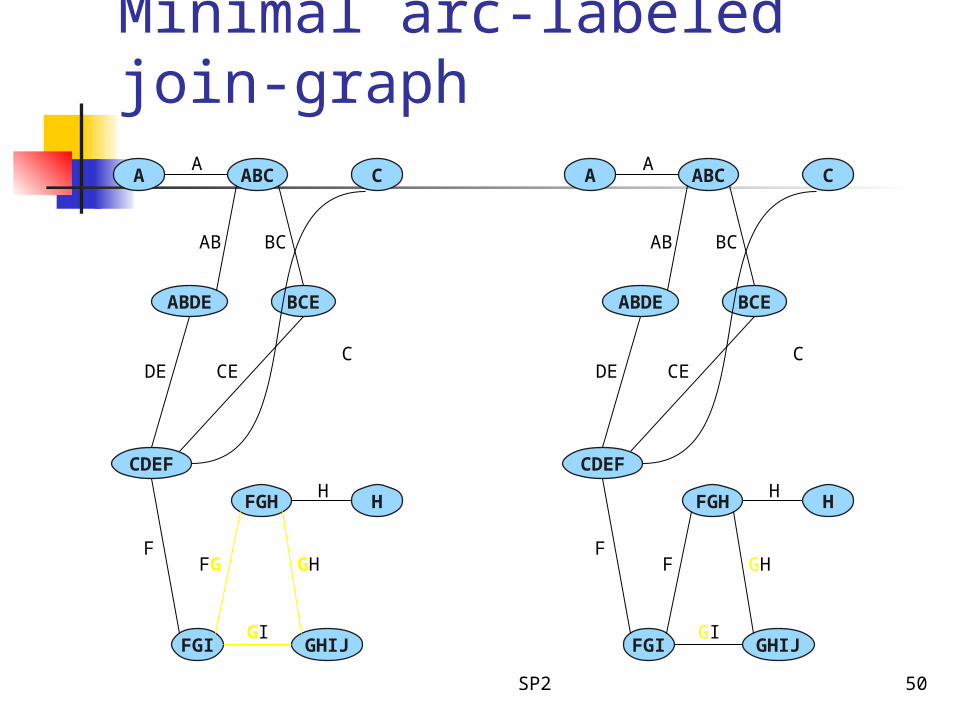
Minimal arc-labeled join-graph
A
ABDE
FGI
ABC
BCE
GHIJ
CDEF
FGH
C
H
A
AB BC
CDE CE
H
FFG GH
GI
A
ABDE
FGI
ABC
BCE
GHIJ
CDEF
FGH
C
H
A
AB BC
CDE CE
H
FF GH
GI

SP2 51
Join-graph decompositions
a) Minimal arc-labeled join graph
b) Join-graph obtained by collapsing nodes of graph a)
c) Minimal arc-labeled join graph
A
ABDE
FGI
ABC
BCE
GHIJ
CDEF
FGH
C
H
A
AB BC
CDE CE
H
FF GH
GI
ABCDE
FGI
BCE
GHIJ
CDEF
FGH
BC
CDE CE
FF GH
GI
ABCDE
FGI
BCE
GHIJ
CDEF
FGH
BC
DE CE
FF GH
GI

SP2 52
Tree decompositionABCDE
FGHI GHIJ
CDEF
CDE
F
GHI
a) Minimal arc-labeled join graph
a) Tree decomposition
ABCDE
FGI
BCE
GHIJ
CDEF
FGH
BC
DE CE
FF GH
GI

SP2 53
Join-graphsA
ABDE
FGI
ABC
BCE
GHIJ
CDEF
FGH
C
H
A C
A AB BC
BE
C
CDE CE
FH
FFG GH H
GI
A
ABDE
FGI
ABC
BCE
GHIJ
CDEF
FGH
C
H
A
AB BC
CDE CE
H
FF GH
GI
ABCDE
FGI
BCE
GHIJ
CDEF
FGH
BC
DE CE
FF GH
GI
ABCDE
FGHI GHIJ
CDEF
CDE
F
GHI
more accuracy
less complexity
SP2 54
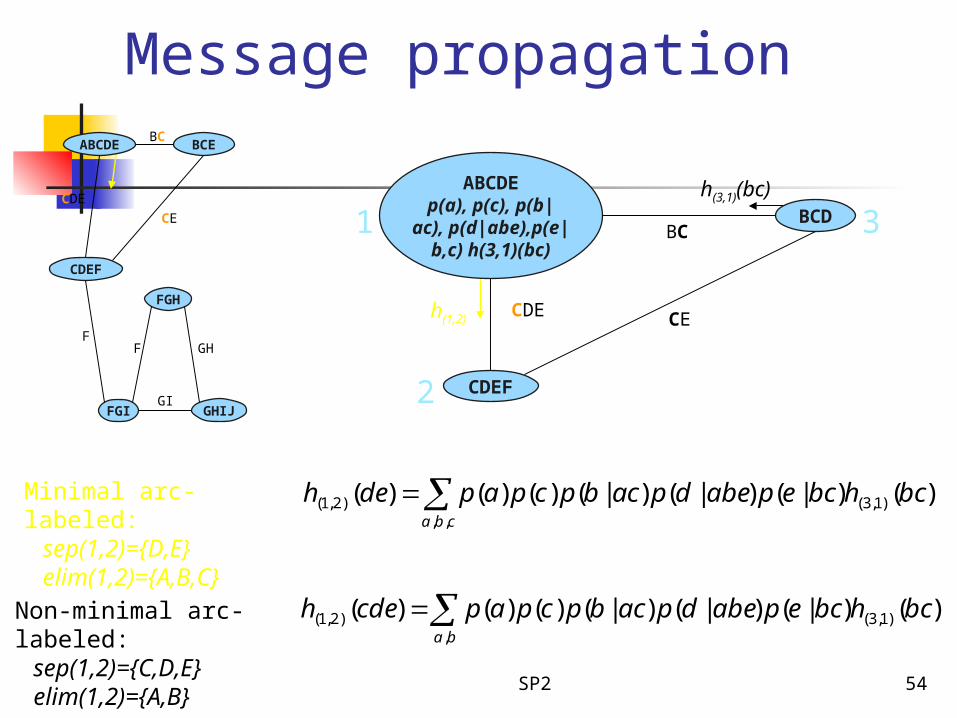
Message propagationABCDE
FGI
BCE
GHIJ
CDEF
FGH
BC
CDE
CE
FF GH
GI
ABCDEp(a), p(c), p(b|ac), p(d|abe),p(e|b,c)
h(3,1)(bc)
BCD
CDEF
BC
CDE CE
1 3
2
h(3,1)(bc)
h(1,2)
Minimal arc-labeled: sep(1,2)={D,E} elim(1,2)={A,B,C}
Non-minimal arc-labeled: sep(1,2)={C,D,E} elim(1,2)={A,B}
cba
bchbcepabedpacbpcpapdeh,,
)1,3()2,1( )()|()|()|()()()(
ba
bchbcepabedpacbpcpapcdeh,
)1,3()2,1( )()|()|()|()()()(

SP2 55
Bounded decompositions We want arc-labeled decompositions such
that: the cluster size (internal width) is bounded by i (the
accuracy parameter) the width of the decomposition as a graph (external
width) is as small as possible
Possible approaches to build decompositions: partition-based algorithms - inspired by the mini-
bucket decomposition grouping-based algorithms

SP2 56
Partition-based algorithms
G
E
F
C D
B
A
a) schematic mini-bucket(i), i=3 b) arc-labeled join-graph decomposition
CDB
CAB
BA
A
CBP(D|B)
P(C|A,B)
P(A)
BA
P(B|A)
FCD
P(F|C,D)
GFE
EBF
BF
EFP(E|B,F)
P(G|F,E)
B
CD
BF
A
F
G: (GFE)
E: (EBF) (EF)
F: (FCD) (BF)
D: (DB) (CD)
C: (CAB) (CB)
B: (BA) (AB) (B)
A: (A)

SP2 57
IJGP properties IJGP(i) applies BP to min arc-labeled join-
graph, whose cluster size is bounded by i
On join-trees IJGP finds exact beliefs
IJGP is a Generalized Belief Propagation algorithm (Yedidia, Freeman, Weiss 2001)
Complexity of one iteration: time: O(deg•(n+N) •d i+1) space: O(N•d)

SP2 58
Empirical evaluation
Algorithms: Exact IBP MC IJGP
Measures: Absolute error Relative error Kulbach-Leibler (KL) distance Bit Error Rate Time
Networks (all variables are binary): Random networks Grid networks (MxM) CPCS 54, 360, 422 Coding networks

SP2 59
Random networks - KL at convergence
evidence=0
Random networks, N=50, K=2, P=3, evid=0, w*=16, 100 instances
i-bound1 2 3 4 5 6 7 8 9 10 11
KL
dist
ance
1e-5
1e-4
1e-3
1e-2
IJGPMCIBP
Random networks, N=50, K=2, P=3, evid=5, w*=16, 100 instances
i-bound
1 2 3 4 5 6 7 8 9 10 11K
L di
stan
ce1e-5
1e-4
1e-3
1e-2
IJGPMCIBP
evidence=5
SP2 60
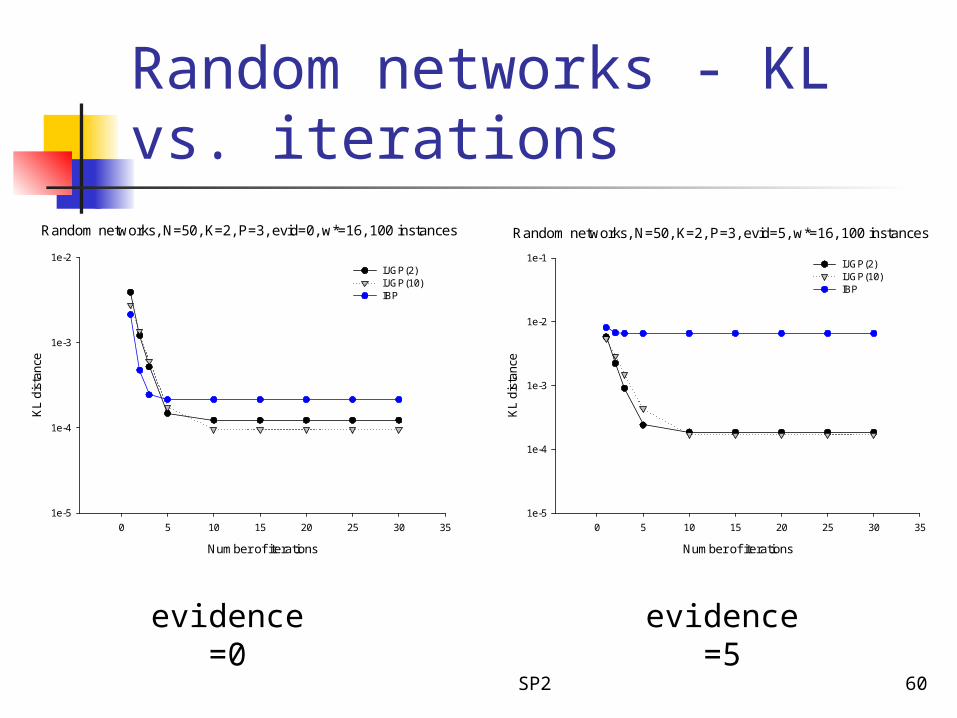
Random networks - KL vs. iterations
evidence=0 evidence=5
Random networks, N=50, K=2, P=3, evid=0, w*=16, 100 instances
Number of iterations
0 5 10 15 20 25 30 35
KL
dist
ance
1e-5
1e-4
1e-3
1e-2IJGP(2)IJGP(10)IBP
Number of iterations
0 5 10 15 20 25 30 35
KL
dist
ance
1e-5
1e-4
1e-3
1e-2
1e-1IJGP(2)IJGP(10)IBP
Random networks, N=50, K=2, P=3, evid=5, w*=16, 100 instances

SP2 61
Random networks - TimeRandom networks, N=50, K=2, P=3, evid=5, w*=16, 100 instances
i-bound
1 2 3 4 5 6 7 8 9 10 11
Tim
e (
seco
nds
)
0.0
0.2
0.4
0.6
0.8
1.0
IJGP 20 itMCIBP 10 it

SP2 62
Coding networks - BERCoding, N=400, 500 instances, 30 it, w*=43, sigma=.32
i-bound
0 2 4 6 8 10 12
BE
R
0.00237
0.00238
0.00239
0.00240
0.00241
0.00242
0.00243
IBPIJGP
Coding, N=400, 500 instances, 30 it, w*=43, sigma=.51
i-bound
0 2 4 6 8 10 12
BE
R
0.0745
0.0750
0.0755
0.0760
0.0765
0.0770
0.0775
0.0780
0.0785
IBPIJGP
Coding, N=400, 500 instances, 30 it, w*=43, sigma=.65
i-bound
0 2 4 6 8 10 12
BE
R
0.1900
0.1902
0.1904
0.1906
0.1908
0.1910
0.1912
0.1914
IBPIJGP
sigma=.22 sigma=.32
sigma=.51 sigma=.65
Coding, N=400, 1000 instances, 30 it, w*=43, sigma=.22
i-bound
0 2 4 6 8 10 12
BE
R
1e-5
1e-4
1e-3
1e-2
1e-1
IJGPMCIBP

SP2 63
Coding networks - TimeCoding, N=400, 500 instances, 30 iterations, w*=43
i-bound
0 2 4 6 8 10 12
Tim
e (s
econ
ds)
0
2
4
6
8
10
IJGP 30 iterationsMCIBP 30 iterations

SP2 64
IJGP summary IJGP borrows the iterative feature from IBP and the
anytime virtues of bounded inference from MC
Empirical evaluation showed the potential of IJGP, which improves with iteration and most of the time with i-bound, and scales up to large networks
IJGP is almost always superior, often by a high margin, to IBP and MC
Based on all our experiments, we think that IJGP provides a practical breakthrough to the task of belief updating
SP2 65
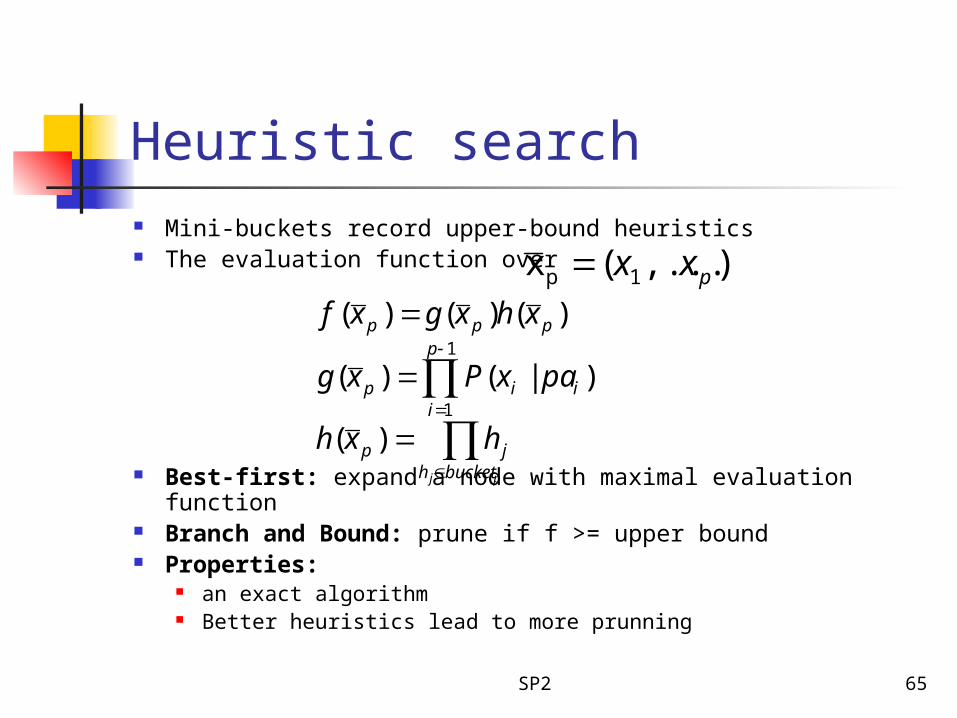
Heuristic search Mini-buckets record upper-bound heuristics The evaluation function over
Best-first: expand a node with maximal evaluation function Branch and Bound: prune if f >= upper bound Properties:
an exact algorithm Better heuristics lead to more prunning
),...(x 1p pxx
pj buckethjp
p
iiip
ppp
hxh
paxPxg
xhxgxf
)(
)|()(
)()()(1
1

SP2 66
Heuristic Function
Given a cost functionP(a,b,c,d,e) = P(a) • P(b|a) • P(c|a) • P(e|b,c) • P(d|b,a)
Define an evaluation function over a partial assignment as theprobability of it’s best extension
f*(a,e,d) = maxb,c P(a,b,c,d,e) = = P(a) • maxb,c P)b|a) • P(c|a) • P(e|b,c) • P(d|a,b)
= g(a,e,d) • H*(a,e,d)
E
E
DA
D
B
D
D
B0
1
1
0
1
0
SP2 67
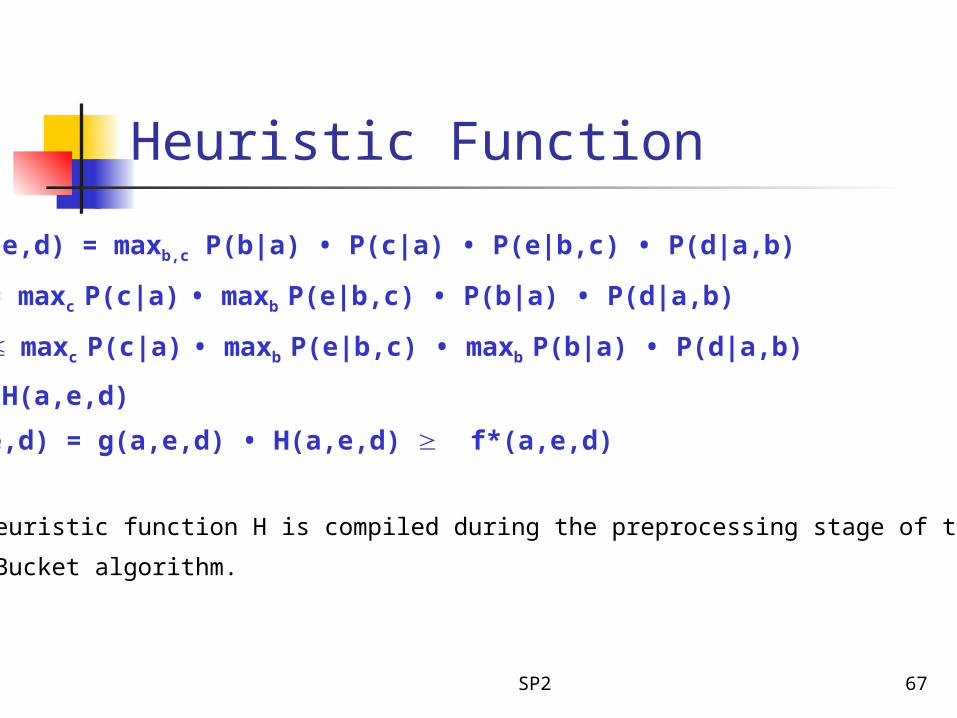
Heuristic Function
H*(a,e,d) = maxb,c P(b|a) • P(c|a) • P(e|b,c) • P(d|a,b)
= maxc P(c|a) • maxb P(e|b,c) • P(b|a) • P(d|a,b)
maxc P(c|a) • maxb P(e|b,c) • maxb P(b|a) • P(d|a,b)
= H(a,e,d)
f(a,e,d) = g(a,e,d) • H(a,e,d) f*(a,e,d)
The heuristic function H is compiled during the preprocessing stage of the
Mini-Bucket algorithm.

SP2 68
maxB P(e|b,c) P(d|a,b) P(b|a)
maxC P(c|a) hB(e,c)
maxD hB(d,a)
maxE hC(e,a)
maxA P(a) hE(a) hD (a)
Heuristic Function
The evaluation function f(xp) can be computed using function
recorded by the Mini-Bucket scheme and can be used to estimate
the probability of the best extension of partial assignment xp={x1, …, xp},
f(xp)=g(xp) H(xp )
For example,
H(a,e,d) = hB(d,a) hC (e,a)
g(a,e,d) = P(a)

SP2 69
Properties
Heuristic is monotone Heuristic is admissible Heuristic is computed in linear time IMPORTANT:
Mini-buckets generate heuristics of varying strength using control parameter – bound I
Higher bound -> more preprocessing -> stronger heuristics -> less search Allows controlled trade-off between
preprocessing and search

SP2 70
Empirical Evaluation of mini-bucket heuristics
Time [sec]
0 10 20 30
% S
olve
d E
xact
ly
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
BBMB i=2
BFMB i=2
BBMB i=6
BFMB i=6
BBMB i=10
BFMB i=10
BBMB i=14
BFMB i=14
Random Coding, K=100, noise 0.32
Time [sec]
0 10 20 30
% S
olve
d E
xact
ly
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
BBMB i=6 BFMB i=6 BBMB i=10 BFMB i=10 BBMB i=14 BFMB i=14





























