Embed Size (px)
Citation preview

Analysis of DC/DC Boost Converters Design Methods
with Filter Application
by
Madelyn Bailey Ulferts, BS. EE
A Thesis
In
Electrical Engineering
Submitted to the Graduate Faculty
of Texas Tech University in
Partial Fulfillment of
the Requirements for
the Degree of
MASTER OF SCIENCE
Approved
Dr. Stephan Bayne
Chair of Committee
Dr. Changzhi Li
Mark Sheridan
Dean of the Graduate School
December, 2015

Copyright 2015, Madelyn Bailey Ulferts

Texas Tech University, Madelyn Bailey Ulferts, December 2015
ii
ACKNOWLEDGMENTS
I would like to express strong appreciation for my thesis committee chair, Dr.
Stephan Bayne, who helped in the decision of the scope of this thesis. I would also
like to thank my committee member, Dr. Changzhi Li, who inspired my interest in
EMI creation, control, and effect by attending his Microwave Solid State Circuits and
Modern Radar Circuits and System classes. The outstanding professors and curriculum
at Texas Tech University’s Electrical Engineering department were curtail in
providing me with the knowledge and resources to create this thesis. It was the
departments’ professors’ and their passion for educating as well as their willingness to
give time to students that allowed me to expand my knowledge on the topics covered
in this thesis.
I also would like to take this opportunity to thank my parents, Mark and Karen
Ulferts and my older sister Katelyn. It was their work in the engineering field that
inspired me to become and engineer from an early age. My dad created in me the drive
and perseverance to complete this thesis as well as the Masters program at Texas Tech
University. My mom always set a leading example to which I followed. I am grateful
to have a sister one year ahead of me in the Electrical Engineering program and was
willing to guide me through the program.
Texas Tech University, Madelyn Bailey Ulferts, December 2015
iii
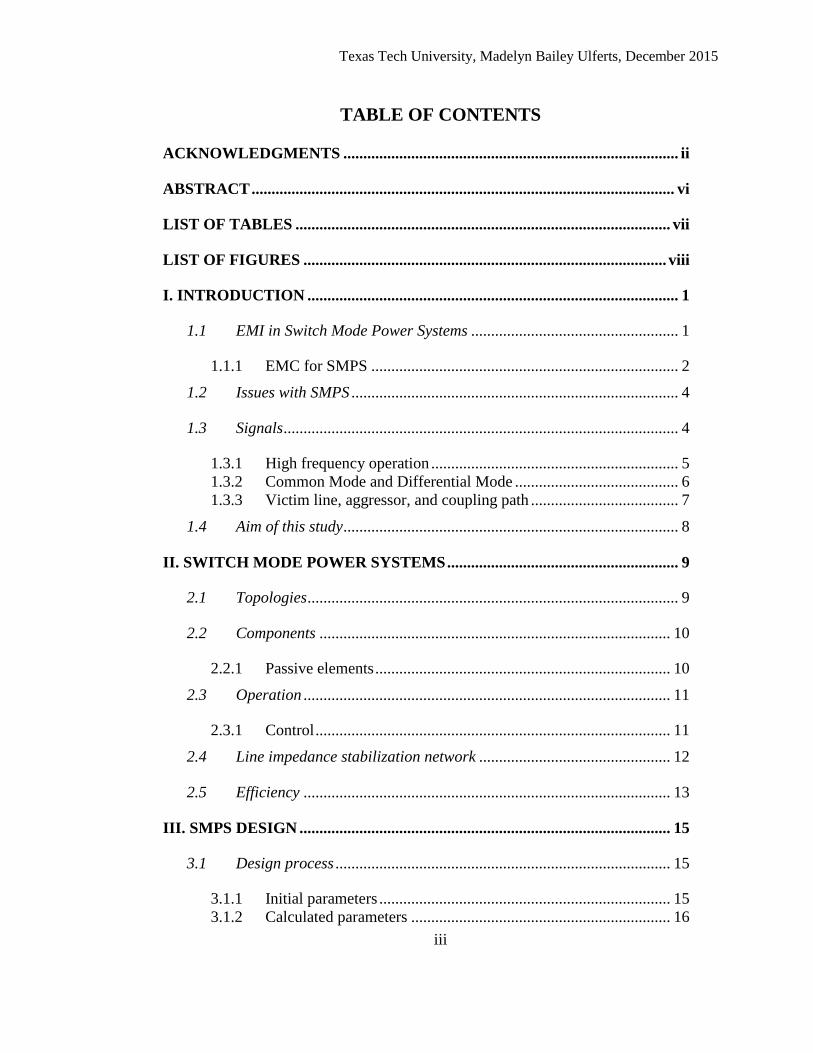
TABLE OF CONTENTS
ACKNOWLEDGMENTS .................................................................................... ii
ABSTRACT .......................................................................................................... vi
LIST OF TABLES .............................................................................................. vii
LIST OF FIGURES ........................................................................................... viii
I. INTRODUCTION ............................................................................................. 1
1.1 EMI in Switch Mode Power Systems .................................................... 1
1.1.1 EMC for SMPS ............................................................................. 2
1.2 Issues with SMPS .................................................................................. 4
1.3 Signals ................................................................................................... 4
1.3.1 High frequency operation .............................................................. 5
1.3.2 Common Mode and Differential Mode ......................................... 6 1.3.3 Victim line, aggressor, and coupling path ..................................... 7
1.4 Aim of this study .................................................................................... 8
II. SWITCH MODE POWER SYSTEMS .......................................................... 9
2.1 Topologies ............................................................................................. 9
2.2 Components ........................................................................................ 10
2.2.1 Passive elements .......................................................................... 10
2.3 Operation ............................................................................................ 11
2.3.1 Control ......................................................................................... 11
2.4 Line impedance stabilization network ................................................ 12
2.5 Efficiency ............................................................................................ 13
III. SMPS DESIGN ............................................................................................. 15
3.1 Design process .................................................................................... 15
3.1.1 Initial parameters ......................................................................... 15 3.1.2 Calculated parameters ................................................................. 16

Texas Tech University, Madelyn Bailey Ulferts, December 2015
iv
3.1.3 Component calculation ................................................................ 18
IV. ANALYSIS I OF SMPS DESIGN ............................................................... 23
4.1 Design Values ..................................................................................... 23
4.2 Output response .................................................................................. 23
4.3 Component Values .............................................................................. 24
4.4 Results ................................................................................................. 32
V. MODIFYED DESIGN OF SMPS ................................................................. 36
5.1 Component calculation and selection ................................................. 36
5.2 Results ................................................................................................. 40
VI. FILTER APLLICATION FOR MODIFIED SMPS DESIGN ................. 45
6.1 Input filter topologies.......................................................................... 45
6.2 Design process .................................................................................... 46
6.2.1 Applied filter process .................................................................. 48
6.3 Results ................................................................................................. 49
VII. RESULTS .................................................................................................... 64
7.1 Comparison of converter A and B test results .................................... 65
7.1.1 Converter A ................................................................................. 65
7.1.2 Converter B ................................................................................. 66
7.2 Comparison of converter C and D test results ................................... 66
7.2.1 Converter C ................................................................................. 66 7.2.2 Converter D ................................................................................. 67
7.3 Comparison of converter E and F test results .................................... 67
7.3.1 Converter E .................................................................................. 67 7.3.2 Converter F .................................................................................. 68
7.4 Comparison of converter G and H test results ................................... 68
7.4.1 Converter G ................................................................................. 68 7.4.2 Converter H ................................................................................. 69

Texas Tech University, Madelyn Bailey Ulferts, December 2015
v
7.5 Conclusion .......................................................................................... 69
BIBLIOGRAPHY ............................................................................................... 71
APPENDIX
A MAGNIFIED SIMULATION RESULTS OF CONVERTERS BEFORE FILTER ......... 73
B MAGNIFIED SIMULATION RESULTS OF CONVERTERS WITH FILTERS ............ 77

Texas Tech University, Madelyn Bailey Ulferts, December 2015
vi
ABSTRACT
The research conducted in this paper is focused on DC/DC boost switch mode
power sources, also called DC/DC converters. SMPS are common issues in systems
due to their ability to create high EMI levels and prevent a system from meeting EMC
standards. EMI of a SMPS can be reduced in the designing stages of the converter.
After the initial design of the SMPS, input filters can be applied to further reduce EMI
in the system and allow the converter to be EMC compliant.
The research conducted in this thesis analyzes SMPS with switching
frequencies of 200kHz, 800kHz, 1.4MHz, and 2MHz with duty cycles of 80% and
92%. The set of SMPS under test are then designed and analyzed to determine the
effect of variables such as switching frequency, duty cycle, and load resistance have
on EMI levels SMPS. This new method for designing SMPS begins by designing the
set of SMPS on a discrete level to allow initial analyzation of how converters are
effected by the variable in question. This initial method is then modified to determine
a finite set of component values that are appropriate across the set of SMPS under test.
After analyzing the results of the modified method, a set of input filters are applied to
each SMPS under study to determine which filter will result in a passing level of EMI
for each SMPS.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
vii
LIST OF TABLES
1.1 CISPR22/EN55022 Class B Conducted EMI LIMIT …………………………3
3.1 User Defined Input and Output Parameters………………………………..…16
3.2 Initial Parameter Calculations…………………………………………..….…17
3.3 Initial and Calculated Design Parameters…………………………………….18
3.4 Converts for Testing…………………………………………………………..19
3.5 Calculated Switching Periods…………………………………………….…..20
4.1 Effect of Load Resistance on Converter Output……………………………...24
4.2 Switch and MOSFET Operating Values………………………………...……25
4.3 Si4416DY MOSFET Data………………………………………………...….28
4.4 Component Calculations……………………………………………………...28
4.5 Statistical Component Variables ………………………………………….….31
4.7 EMI Result of Simulated Converter…………………………………….…….32
4.8 Statistical Results of EMI Levels………………………………………....…..34
5.1 Modified Component Calculation Equations…………………...…………….36
5.2 Applied Modified Calculations……………………………………………….38
5.3 EMI Results Before Filter…………………………………………………….44
6.1 Filter Parameters…………………………………….…………………..……47
6.2 Filter Component Equations………………………………………………….47
6.3 Filter Component Calculations…………………………………………….…48
6.4 Resulting EMI Range for Filter Application……………………………….…62

Texas Tech University, Madelyn Bailey Ulferts, December 2015
viii
LIST OF FIGURES
2.1 DC/DC Boost Converter Schematic………………………………..………….9
2.2 LISN Topology…………………..…………………………………………..13
2.3 On and Off Losses of the Boost Switching Converter………………………..14
5.1 Simulation Results of Converter A before Filter………………………….…40
5.2 Simulation Results of Converter B before Filter…………….………………41
5.3 Simulation Results of Converter C before Filter……………………….…….41
5.4 Simulation Results of Converter D before Filter……………………………..42
5.5 Simulation Results of Converter E before Filter…………………………….42
5.6 Simulation Results of Converter F before Filter……….……………………43
5.7 Simulation Results of Converter G before Filter………………………….….43
5.8 Simulation Results of Converter H before Filter…………………….………44
6.1 Pi Filter Schematic……………………………………...……………….…..46
6.2 L Filter Schematic…………………………………………..…..……………46
6.3 T Filter Schematic………………………………………………………...…..46
6.4 Simulation Results of Converter A with Pi Filter……………….………...…50
6.5 Simulation Results of Converter A with L Filter……………….………..…..50
6.6 Simulation Results of Converter A with T Filter…………….…………....…51
6.7 Simulation Results of Converter B with Pi Filter………………………........51
6.8 Simulation Results of Converter B with L Filter……………………………..52
6.9 Simulation Results of Converter B with T Filter………………………….....52
6.10 Simulation Results of Converter C with Pi Filter……………………….....…53
6.11 Simulation Results of Converter C with L Filter………………………...…..53
6.12 Simulation Results of Converter C with T Filter………………………….…54
6.13 Simulation Results of Converter D with Pi Filter………………………...…54
6.14 Simulation Results of Converter D with L Filter………………………….….55
6.15 Simulation Results of Converter D with T Filter………………………...….55
6.16 Simulation Results of Converter E with Pi Filter…………………………….56
6.17 Simulation Results of Converter E with L Filter…………………………..…56

Texas Tech University, Madelyn Bailey Ulferts, December 2015
ix
6.18 Simulation Results of Converter E with T Filter…………………………..…57
6.19 Simulation Results of Converter F with Pi Filter………………………..…...57
6.20 Simulation Results of Converter F with L Filter……………………………...58
6.21 Simulation Results of Converter F with T Filter…………………………..…58
6.22 Simulation Results of Converter G with Pi Filter………………………….…59
6.23 Simulation Results of Converter G with L Filter………………………….…59
6.24 Simulation Results of Converter G with T Filter………………………..........60
6.25 Simulation Results of Converter H with Pi Filter………………………….…60
6.26 Simulation Results of Converter H with L Filter…………………………..…61
6.27 Simulation Results of Converter H with T Filter…………………………..…61
A.1 Magnified Simulation Results of Converter A before Filter……………….....73
A.2 Magnified Simulation Results of Converter B before Filter……………….....73
A.3 Magnified Simulation Results of Converter C before Filter………………….74
A.4 Magnified Simulation Results of Converter D before Filter……………….....74
A.5 Magnified Simulation Results of Converter E before Filter……………….....75
A.6 Magnified Simulation Results of Converter F before Filter……………….....75
A.7 Magnified Simulation Results of Converter G before Filter……………….....76
A.8 Magnified Simulation Results of Converter H before Filter…………...……..76
B.1 Magnified Simulation Results of Converter A with Pi Filter………...……..77
B.2 Magnified Simulation Results of Converter A with L Filter……………..…78
B.3 Magnified Simulation Results of Converter A with T Filter…………….….78
B.4 Magnified Simulation Results of Converter B with Pi Filter………………..79
B.5 Magnified Simulation Results of Converter B with L Filter……………..….79
B.6 Magnified Simulation Results of Converter B with T Filter……………...….80
B.7 Magnified Simulation Results of Converter C with Pi Filter…………………80
B.8 Magnified Simulation Results of Converter C with L Filter……………....…81
B.9 Magnified Simulation Results of Converter C with T Filter…………….…..81
B.10 Magnified Simulation Results of Converter D with Pi Filter…………….….82
B.11 Magnified Simulation Results of Converter D with L Filter…………….…..82
B.12 Magnified Simulation Results of Converter D with T Filter…………….…..83

Texas Tech University, Madelyn Bailey Ulferts, December 2015
x
B.13 Magnified Simulation Results of Converter E with Pi Filter……………....…83
B.14 Magnified Simulation Results of Converter E with L Filter………………….84
B.15 Magnified Simulation Results of Converter E with T Filter………………...84
B.16 Magnified Simulation Results of Converter F with Pi Filter……………..….85
B.17 Magnified Simulation Results of Converter F with L Filter……………..…..85
B.18 Magnified Simulation Results of Converter F with T Filter……………..…..86
B.19 Magnified Simulation Results of Converter G with Pi Filter…………..……86
B.20 Magnified Simulation Results of Converter G with L Filter………….….…..87
B.21 Magnified Simulation Results of Converter G with T Filter………….……..87
B.22 Magnified Simulation Results of Converter H with Pi Filter………….…….88
B.23 Magnified Simulation Results of Converter H with L Filter……………...…88
B.24 Magnified Simulation Results of Converter H with T Filter…………………89

Texas Tech University, Madelyn Bailey Ulferts, December 2015
1
CHAPTER I
INTRODUCTION
Switched mode power supplies (SMPS) are systems that convert one voltage
level to another and are commonly called Converters. SMPS are able to step-up, step-
down, or invert a voltage. For the purpose of this paper, the DC/DC SMPS, or DC/DC
Converter, will be evaluated. Before SMPS were used, linear regulators made up the
market for power conversion. Although linear regulators are cost efficient, they have
the drawback of generating high amounts of heat which then requires an undesired
bulky heat sink to be added to the circuits. SMPS offer a reasonable solution but
comes with its own set of drawbacks. SMPS are valuable in systems where various
sub-circuits or components require different levels of voltage from one another. SMPS
are well desired in today’s industry because of their increased efficiency, smaller and
lighter size, reduced cost, and ability to operate over large input voltage ranges. The
flexibility in input voltage ranges have increased the number of applications and
topologies that SMPS are being used in for today’s modern electronics.
1.1 EMI in Switch Mode Power Systems
Electromagnetic interference (EMI) is defined as “the disruption of operation
of an electronic device when it is in vicinity of an electromagnetic field (EM field) in
the radio frequency (RF) spectrum that is caused by another electronic device.” [1]
EMI can appear in many forms, caused by many factors, and can affect circuits in
many ways. EMI has the ability to prevent circuits and components from operating the
way they were designed and intended to operate. This disturbance can interrupt
systems, lead to proximity effect, create voltage drops, eddy current losses, degrade or
limit performance, block transmissions, create hysteresis losses, create harmonic
distortion, effect permeability of materials, or even damage components or other
systems. Ideally, EMI would not exist. In reality, EMI is a growing issue with the
increasing demand for technology to increase in performance and speeds.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
2
For power supply applications, there are three things that can occur to cause
EMI issues. First, a signal source can create noise. The second cause is the presence of
a transmission path for the noise to travel on. The third cause is the presence of a
receiver that is too sensitive to noise that it allows for easy distortion. The typical
method for reducing EMI is to address and remove the issue at the source of the
system, which in this case is the SMPS. For power supplies, there are two forms of
EMI that are present; conducted and radiated. Conductive EMI appears from physical
contact of the conductor components while radiated EMI appears without the need for
contact. It is agreed that 30MHz is the frequency at which conducted EMI turns into
radiated EMI. Assuming this agreement, this paper will focus on conducted EMI.
Conducted EMI occurs for frequencies below 30MHz and is driven by current.
Radiated EMI will not be addressed in this testing due to the complications of
measuring magnetic fields in free space.
There are two goals that designers wish to meet in order to find their design
acceptable. The first goal for EMI reduction is to reduce it to a level that it passes EMI
testing standards. These standards are also called electromagnetic compliance (EMC)
standards. The second goal for reducing EMI is to reduce it to a level where the design
will work reliable, efficient, and without disturbing other equipment nearby. When a
product meets these goals, it is considered to be “EMC-compliant”.
1.1.1 EMC for SMPS
Electromagnetic Compatibility (EMC) is defined as the “ability of a device, unit of
equipment, or system to function satisfactorily in its electromagnetic environment without
introducing intolerable electromagnetic disturbances to anything in that environment.” [2]
This means that EMC is in absence of EMI. EMC standards came about when the consumer
market started to demand for faster, lighter, and more efficient technology. With these
demands in SMPS designs, it created growing EMI issues. EMC standards are
designed to address two major concerns. First, the amount of radiated and/or
conducted emissions generated by a system must be limited. Second, the minimum
immunity tolerance of a system to radiated and/or conducted emissions must be set.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
3
Standards typically define a systems allowable limits, setup and process for testing
EMI, equations and documentation for analyzing a system, and various measurement
methods. EMC standards are evaluated with test methods conducted in certified labs.
In order to determine if a design is EMC-compliant, the design is evaluated through all
design stages. This evaluation consists of looking for places where poor EMI designs
cause problems at other stages.
The Federal Communication Commission (FCC) is an organization that sets
rules and standards to regulate conducted emissions occurring in the frequency range
of 450 kHz to 30 MHz. CISPR is a leading organization with the same purposes as the
FCC except with focus on the 150 kHz to 30 MHz frequency range. For the purpose of
this paper, we will be focusing on the standard CISPR22/EN55022 set by FCC and
CISPR for the frequency range of 150 kHz to 30 MHz. This standard document is
focused on information technology equipment. The supply voltage of these
equipment’s must be less than 600V.
When evaluating performance at various stages in simulation, the designer my
consider component variations. In reality, a component properties and behavior can
vary from the predicted properties and behavior of simulation. This is not to say that
simulation is not needed. The conducted EMI limits are summed up in Table 1.1.
Table 1.1 CISPR22/EN55022 Class B Conducted EMI LIMIT
Emission Frequency Conducted Limit
dBµV V 9kHz – 50kHz 100 316mV
50kHz – 150kHz 90-80 32mV-10mV
150kHz – 500kHz 56-46 .63mV-.2mV
.5MHz-5MHz 46 200µV
5MHz – 30MHz 50 319µV

Texas Tech University, Madelyn Bailey Ulferts, December 2015
4
1.2 Issues with SMPS
SMPS come with increased complexity of designing systems in which they are
used. This is due to several key disadvantages of their operation. The main
disadvantage of SMPS is the noise, which they bring to a system. The switching
operation, which will be discussed and evaluated in Chapters IV and V, causes
transient spikes that require proper filtration or they will come with the consequence
of creating EMI noise. For SMPS design, external components are needed. Adding in
external components comes with the drawback of increasing the cost to design the
SMPS and space to place the components. SMPS are a complicated system to design,
therefore they need designers that are experts in SMPS which can be difficult to find.
The difficulty of design SMPS lies in the tricky aspect of reducing and ensuring the
reduction of ripple components to a level set by a standards organization. This
difficulty comes with the promise of extra time requirement to design a properly
operating system. Increasing the components, time to market, and level of expertise of
the designer all contribute to increasing the cost of SMPS. These disadvantages are
often over looked when they are compared to the benefits that SMPS offer.
1.3 Signals
Signals are the root method for communication and EMI travel in SMPS.
Signal Integrity is a field designed to ensure the proper operation and design of
systems carrying signals. Signals can be broken up into many categories based on the
characteristics that comprise them. High frequency signals relate to the speed of
frequency in which they operate. Common mode and differential mode signals are
signals that appear in systems without always being with intent. These signals relate
back to EMI and must be controlled to ensure that a system is operating in the EMI
limit set for them.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
5
1.3.1 High frequency operation
For lower frequencies, EMI is caused by conduction and is simpler to control.
As frequencies increase, the ability to control EMI becomes more complicated. This
complication occurs from the effect of high frequencies ability to create radiate EMI.
Modern Switch Mode Power Supplies switching mechanisms have reduced in
switching time which has led to increased voltage and current rise and fall times. The
fast edges now present in the system and increasing frequency speeds have created an
issue of increased energy in the system. This energy is the source of EMI problems.
EMI occurring at high frequencies can turn every conductor in a system into an
antenna.
Operating SMPS at high frequencies does offer some advantages. For designs
with transformers, the transformer type will be high frequency which will be smaller
in size than those for lower speeds. When the switch operates at increasing speeds, the
ripple frequency will also increase. This will allow for a smaller size capacitor to be
used to smooth out the ripple. For designs with a square wave driving the switching
transistor, the dissipation of power will be less than those with a series regulator
transistor. This aids in the cost effectiveness and architecture of the design by allowing
lower cost and smaller size transistors to be selected. The improved architecture
allows for SMPS to be lighter and smaller which is more appealing for the architecture
of large systems needing power sources.
As frequencies increase it created ringing in all resonant tanks of these power
systems that have become more apparent and problematic. Ringing is defined as
unwanted oscillation in a signal that occurs when the fast edges cause the parasitic
inductances and capacitances to resonate at their characteristic frequency. The source
of concern with ringing present in a system is the effect it has on the power supplies
working reliability and ability to pass standards and tests. It is proposed that by
increasing switching speeds will lead to reduced losses and increased efficiency in
power supplies. It is expected that increased switching speeds should be accompanied
with increased frequency that leads to improved transient response and smaller passive
components. This promise has yet to be realized due to the cost of components

Texas Tech University, Madelyn Bailey Ulferts, December 2015
6
suitable for high frequencies such as transformers and the issues of EMI problems
accompanying high frequencies.
1.3.2 Common Mode and Differential Mode
Differential mode signals have key characteristics that aid against Signal
Integrity (SI) issues such as robust propagation on signal paths. A Differential pair is
made up of two transmission lines. Differential pairs offer key features that help
optimize transmission of high bandwidth signals. Reflections and distortions are
minimized by their uniform cross section and constant impedance. Both lines of a
differential pair must be the same length to ensure constant time delay. The edges of
the differential signals are sharp and well defined as result of the matched time delay
on the pairs. Differential signal can be converted into common mode when the time
delays between the pairs become skewed due to lack of symmetry in a pair. Coupling
between the two lines of a differential pair offer some level of noise immunity from
neighboring noise sources. If differential signals are not properly balanced or filtered
and common signals are present then the potential for EMI problems arise.
Unwanted differential noise is sourced from the current on the dc power line
that carries pulsating current from the dc power line. The coupling that occurs between
the power line and the ground is the root cause of differential noise. The input
impedance of the DM noise source is dependent on the converter topology selected
and the components that compose it. Differential noise affects circuits by dissipating
its energy into the line to neutral paths of the system. On an electrical level,
differential noise can affect a circuit by over biasing the P-N junction of diodes
leading to the rectifying diode circuit to fail to operate at intended. Capacitors are
affected by differential noise by the ability of the noise to degrade capacitors with
opposite polarity to the noise. If the differential noise level in the system is too high
then it will cause transformers isolation to breakdown.
Common mode signals propagate on both lines of a transmission line pair.
Common mode signals are equal in amplitude and phase. In ideal situations, common
signals are not problematic and serve no purpose. In reality, common mode signals

Texas Tech University, Madelyn Bailey Ulferts, December 2015
7
have the potential of causing server EMC problems. Common mode signals have
potential to cause saturation in the differential receiver input amplifier resulting in
inaccurate reading of the differential signals. If a common mode signal leaves the
board, it will exit in the form of radiation, which causes EMC issues.
Common mode noise occurs over the parasitic capacitors to ground affected by
the switching action of the system. The impedance of the common mode noise source
is dependent on the selected SMPS topology and its parasitic elements. When stray
capacitance occurs in the system, it will lead to common mode noise. Coupling of
common mode noise occurs along the coupling path of high frequency transformers
that contain parasitic capacitance. At high frequency, the noise will view the
transformers in the system as coupling capacitors. Inductors that are in series with one
another on the power line of the system typically suppress common mode noise. Y-
capacitors can also be used to suppress common mode noise that are connected form
power to ground.
1.3.3 Victim line, aggressor, and coupling path
Commonly, when analyzing a network with greater than 4 ports you must
select a victim line and the remaining lines become the aggressor lines. Simulation on
the selected victim line means that all neighboring lines (aggressors) are simulated as
active in order to create a “worst case” scenario of the victim line. This method is for
the purpose of analyzing crosstalk-coupling effects between the selected victim line
and aggressor lines of a network. The designed software tool will take into account
victim lines and aggressors and allow the user to select which line will be the victim
line in a greater than 4 port network.
Coupling path interference can exist in two forms, conductive or radiation,
which commonly co-exist together at the same time. If the path between the victim
line and the aggressor is connected then the interference is said to be conductive. If no
physical connection between the paths exists then the interference will appear in the
form of radiation. Each system paths and sources are separated into power plane (ie.
Power supply, power and ground traces, or components), signal paths, or package

Texas Tech University, Madelyn Bailey Ulferts, December 2015
8
radiation categories. Common-impedance is interference due to conduction. Near-field
interference will appear from capacitive or inductive coupling. Far-field interference is
equivalent to electromagnetic radiation.
1.4 Aim of this study
The aim of this study is to create a new method for calculating components for
Boost DC/DC Converter. Four switching frequencies will be analyzed as well as two
duty cycles for each switching frequency. The basic method for calculating
components for a Boost DC/DC Converter is introduced in Chapter III. This method is
then analyzed at the highest depth level conducted in this research for each switching
frequency, duty cycle, and load resistance step. The results of this operation is then
compared to determine how switching frequency, duty cycle, and load resistance will
affect the minimum required component values and how this effects the EMI input of
the converter. The method is then reevaluated in Chapter IV to determine component
values that are constant across all switching frequencies, duty cycles, and load
resistance. These constant component values are then analyzed with each previously
tested SMPS designs. The improved method for DC/DC converter design has larger
application by use of constant components. Input filters are then added to the modified
design to create DC/DC boost converters that pass the required EMI and EMC
standards. Three different input filters are tested with each switching frequency and
duty cycle design to determine which filter will serve the best application for the
various converters.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
9
CHAPTER II
SWITCH MODE POWER SYSTEMS
2.1 Topologies
The industry most common DC/DC topologies are the buck, boost, and fly
back converter. Each topologies is used for a different purpose. The buck converter
steps down the voltage from the input to the output of the SMPS. The boost converter
steps up the input voltage to lead to a high output voltage. The fly back converter is an
inverting converter. For the purpose of this study, the DC/DC boost SMPS will be
analyze in design process. The basic design of the boost converter is shown in Figure
2.1.
Figure 2.1 DC/DC Boost Converter Schematic
Boost converters are considered indirect energy transfer converters. The
converter transfers energy by use of an energy storing phase and an energy
discharging phase. When the switch is open the energy is stored in the inductor while
the output capacitor delivers power to the load. When the switch is closed, the
inductor transfers energy to the capacitor to recharge the capacitor. The boost
converter will naturally have an offset current due to the charge time for the inductor.
The drawback to the boost converter inductive charging portion of operation is that it
is not effective when there is a sudden change in demand for increased output power.
The design of the boost converter does not allow for the inductor to rapidly reach a
higher peak voltage without causing the output voltage to drop. Therefore, boost
converters are commonly used in application where there is a need for slower charging
time phase. The benefit of the boost converter design is that the inductor is able to

Texas Tech University, Madelyn Bailey Ulferts, December 2015
10
draw current during the on and off cycles of operation which allows for a lower input
ripple design.
2.2 Components
For DC/DC SMPS a power switch, controller, diodes, and passive components
are needed. The power switch regulates voltage with the use of passive elements such
as resistors, capacitors, and inductors. Power switches are a higher efficient option for
transferring energy in a system. The control of a switch can either be voltage or
current control. The component chosen for the power switching can be either a jfets or
a MOSFETS. Diodes are also used in SMPS design for transferring of energy. SMPS
can use more than one switch to transform dc power levels.
2.2.1 Passive elements
It is known that passive components have the ability to reduce externally
induced interference. Passive components are resistors, capacitors, and inductors.
Basic RC networks are used for creating cost effective monopole low pass filters.
Resistors are useful for absorbing heat from incoming noise with the side effect of
producing thermal noise. Resistors are also ideal for creating input bias current when
places at the input of an op amp. This method creates offset voltage for minimizing dc
offset but does not affect the noise in the circuit.
Capacitors are used for switching applications in need of their ability to store
and transfer energy. Capacitors are also not able to change their voltage abruptly.
These qualities make capacitors the selected component for charge pumps in DC/DC
converters. Inductors are another element commonly chosen for application in switch
mode regulation. Inductors have the ability to transfer energy more efficiently than
other passive components such as resistors. Another key reason for using inductors is
their ability to transfer energy from one source to another regardless of their polarities.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
11
2.3 Operation
Operation of SMPs is dependent on the charging and discharging abilities of
inductors and capacitors. The ability to control the capacitors and inductors voltage is
accomplished by use of a switching device. The capacitor charging property at use in
the SMPS is the current equation. For a capacitor with C capacitance and V voltage
applied over time t, the current equation will yield to be: I = CdV
dt. To review inductor
charging properties, the readier must be reminded of the inductor voltage equation. To
increase the voltage (V) across an inductor with inductance L, a current (i) is applied
over time (t). This yields to the inductor voltage equation: VL = Ldi
dt.
The charging phase of the boost converter occurs when the switch is in the
open state. If the switch has been open for a long period of time, the voltage drop of
the diode will reduce to a negative value and the capacitor will have a charge that is
equal to the input voltage of the converter. Once the switch is closed, the input voltage
passes through the inductor at a linear rate in DC/DC operation. The purpose of the
diode is to prevent the capacitor from discharging the output voltage to ground. For
common SMPS designs, a Schottky diode is used for this purpose. Once the switch
opens again, the current in the inductor must follow a circulating path by reversing
voltage. The inductor voltage will now be in series with the input voltage. The diode
has application in the off time event by passing the inductor current to the output
capacitor and transfer the inductor stored energy into the capacitor and load resistor.
2.3.1 Control
Converters commonly use components such as a power switch for the purpose
of a switching regulator that controls the transfer of energy between input and output
sources. Switching regulators are at the heart of the SMPS technology. In the
switching circuit, a voltage or current can be used to control the charge on the
capacitor or the inductor. The regulator relies on the stored energy properties of
capacitors or inductors. Switching regulators are picked over linear regulators because
Texas Tech University, Madelyn Bailey Ulferts, December 2015
12
of their higher efficiency, ability to maintain more energy during the convention
process, are operable with smaller components, and require less thermal management.
2.4 Line impedance stabilization network
Line impedance stabilization networks (LISN) are required components in
systems where EMI emission and susceptibility is present or potential and needs to be
measured. LISN creates a known impedance that allows noise measurements to be
conducted and isolated unwanted signals from the power source. In order for a device
to be tested for FCC and CISPR standards, a LISN must be placed between the AC or
DC power source and the device under test (DUT). For the purpose of this paper, the
DUT is a SMPS. Typically, LISN are composed of a low pass filter that measures
noise current on the AC or DC power line. The current on the AC or DC line is
dependent on the load or impedance of the SMPS. The impedance seen by the SMPS
on the power line will change over the frequency range of the system. LISN provides a
constant known impedance seen by the SMPS. A second benefit to LISN is the
isolation it creates between the power line and the SMPS that prevents noise on the
power line from entering the system.
For the purpose of this paper, two LISN are used for single phase conducted
emission measurements. This is because both the line and neutral lines must meet
EMC standards to be EMC compatible. Figure 2.2 shows the topology for the LISN
used in the research conducted in this paper which is sourced from standards
document CISPR 16. This LISN topology contains two 50𝜇H inductors, two 250nF
capacitors, two 8𝜇𝐹 capacitors, two 5Ω resistors, and two 50Ω resistors.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
13
Figure 2.2 LISN Topology
This topology operates where the inductors appear shorted while the
capacitors are open to allow power to pass through them to the SMPS. When EMI
frequency level noise appears is the system, the inductors will appear open while
the capacitors are shorted causing the noise to only see the 50Ω resistors of the
LISN. Sense the DM noise travels from the power line, it will then flow through
the two series 50Ω resistors creating a 100Ω load for the DM noise. The CM noise
flows to ground resulting in a load of two 50Ω resistors in parallel with a total
resistance of 25Ω.
2.5 Efficiency
Efficiency is a large concern for designing SMPS. Efficiency is the ratio of
useful output power to total input power of a system and is directly proportional to
power dissipation in the system. If high losses appear in the system, the temperature of
the system will increase causing the need for a thermal management component will
arise. The main locations for power dissipation in DC/DC converters are the inductor
and MOSFET conduction loss, MOSFET switching loss, and rectifying diode loss.
Losses appear in both the on and off state of the converter. Figure 2.3 shows the losses
for on and off switching modes of the boost converter.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
14
Figure 2.3 On and Off Losses of the Boost Switching Converter
For typical converters, the largest power loss risk element is the diode. The
power dissipation is calculated as the forward voltage drop multiplied by the current
passing through it. The reverse recovery of the diode can also effect the loss in the
system. Schottky diodes are selected for the purpose of power loss management.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
15
CHAPTER II
SMPS DESIGN
For analysis of variables effect on boost DC/DC converter operation EMI
results, a standard detailed method will be introduced. This method was constructed to
design at the most detailed level. The method will use the process of having initial
user defined inputs, then proceed to use equations to determine remaining initial
parameters, and finish with calculating each aspect of all components used in the boost
DC/DC converter. The goal of using equations to determine remaining initial design
variables is to constrain these variables in ranges that will have the strongest EMI and
efficiency results. This proposed design method will be analyzed for four switching
frequencies, 200kHz, 800kHz, 1.4MHz, and 2MHz. After the design method has been
analyzed at the highest detail, changed will be made to allow for a design operable in a
larger application range.
3.1 Design process
The design process of the introduced method is one that varies from other
methods by the use of narrowing the allowable user defined inputs. The user is able to
enter in basic parameters for the converter. Once the basic parameters are inputted, the
next step in the design process is to calculate the remaining parameters that will yield
the most desirable efficiency and EMI level. Common with other design processes,
equations for minimum inductor and capacitor values are used. The minimum
component values are effected by the switching frequency, duty cycle, and load
resistance of the converter. After the design process is completed, the results are then
simulated to determine the effect of the various design variables of switching
frequency, duty cycle, and load resistance on the EMI level in the system.
3.1.1 Initial parameters
The boost converter design method that will be evaluated offers the user a
range of values for selecting capacitor size, inductor size, duty cycle, and switching

Texas Tech University, Madelyn Bailey Ulferts, December 2015
16
methods. For this method the user must first define the desired output voltage (𝑉𝑜𝑢𝑡),
the desired switching frequency (𝑓𝑠), output power (𝑃𝑜), and the desired voltage ripple
percent (𝑉𝑟𝑖𝑝). Using these initial parameters and the following steps outlining the
proposed method for designing a SMPS helps user’s better design high efficient and
lower EMI results of SMPS. For this evaluation, the table below shows the first list of
input parameters to be evaluated.
Table 3.1 User Defined Input and Output Parameters
𝑉𝑜𝑢𝑡 24 V
𝑉𝑟𝑖𝑝 .48V (2%)
𝑓𝑠 200kHz
800kHz
1.4MHz
2MHz
𝑃𝑜𝑢𝑡 24 W
3.1.2 Calculated parameters
The first step in this new method is to determine maximum and minimum
values for output current (𝐼𝑜), load resistor (𝑅𝐿) , and output power. The minimum
output current is assumed to be 5% of the maximum output current. The maximum
and minimum load resistors are determined by applying Ohms law. The power
maximums and minimums are calculated with max values for typical power equations.
The set of equations to calculate these values and their resulting values are shown in
the table below.
Table 3.2 Initial Parameter Calculations
Variable Equation Calculation
𝐼𝑜(max) 𝑃𝑜𝑢𝑡
𝑉𝑜𝑢𝑡
24
24= 1 𝐴
𝐼0(min) . 05 × 𝐼𝑚𝑎𝑥 . 05 × 1 = .05 𝐴
𝑅𝐿(min) 𝑉𝑜𝑢𝑡
𝐼𝑜𝑢𝑡_𝑚𝑎𝑥
24
1= 24Ω
𝑅𝐿(max) 𝑉𝑜𝑢𝑡
𝐼𝑜𝑢𝑡_𝑚𝑖𝑛
24
. 05= 430
𝑃𝑜(min) 𝑉𝑜𝑢𝑡 × 𝐼𝑜_𝑚𝑖𝑛 24 × .05 = 1.2

Texas Tech University, Madelyn Bailey Ulferts, December 2015
17
𝑃𝑜(max) 𝑉𝑜𝑢𝑡 × 𝐼𝑜_𝑚𝑎𝑥 24 × 1 = 24
The next step for this method determines the input voltage range and duty cycle
range for the system. This design method aid in designing parameters that will lead to
a lower EMI level design. It is recommended for systems to be at least above 80%
duty cycle to yield the highest desired EMI results. Duty cycle is the ratio of input
voltage over output voltage as shown in equation 3.1 for CCM operation.
𝐷𝐶𝐶𝑀 = 1 −𝑉𝑖𝑛(max)
𝑉𝑜𝑢𝑡 (3.1)
A second determining factor to keep in mind when designing a SMPS is the efficiency
of the system. Efficiency (𝜂) in SMPS designs is generally the ratio of output power to
dissipated power. Efficiency plays a key role in determining duty cycle as well. For
calculating duty cycle in respect to efficacy (𝐷𝑒𝑓𝑓), the following equation is used.
𝐷𝑒𝑓𝑓 = 1 −𝑉𝑖𝑛(max)×𝜂𝐷
𝑉𝑜𝑢𝑡 (3.2)
The efficiently used in this equation (𝜂𝐷) is not assumed to be equal to the efficiency
of the resulting system. Taking efficiency into account at the duty cycle stage helps
better create a higher efficiency design in early stages. In respect to the above
equation, as the efficiency (𝜂𝐷) increases, the duty cycle decreases. The newly
suggested method aims to determine values that meet a compromise in efficiency
versus duty cycle. To accomplish this, the allowable duty cycle efficiency is in the
range of 40% to 100%. The minimum duty cycle for this method as stated above is
80%. It can then be stated that the system is at the highest allowable duty cycle
efficiency (100%) at the minimum allowable duty cycle (80%). Rearranging equation
3.2, the highest allowable input voltage can be calculated as shown below.
𝑉𝑖𝑛_𝑚𝑎𝑥 =𝑉𝑜𝑢𝑡−𝐷𝑒𝑓𝑓_𝑚𝑖𝑛×𝑉𝑜𝑢𝑡
𝜂=
24−.8×24
1= 4.8 𝑉 (3.3)
The maximum duty cycle is determined by the maximum allowable input voltage and
minimum allowable duty cycle efficiency (40%). The minimum input voltage is
determined by the maximum allowable duty cycle and output voltage. Efficiency was
used to calculate the maximum duty cycle and therefore is not needed to calculate the

Texas Tech University, Madelyn Bailey Ulferts, December 2015
18
minimum input voltage. These equations are determined and calculated as shown
below.
𝐷𝑚𝑎𝑥 = 1 −𝑉𝑖𝑛(max)×𝜂𝐷
𝑉𝑜𝑢𝑡= 1 −
4.8×.4
24= .92 (3.4)
𝑉𝑖𝑛(min) = 𝑉𝑜𝑢𝑡 − 𝐷𝑚𝑎𝑥 × 𝑉𝑜𝑢𝑡 = 24 − .92 × 24 = 1.92 𝑉 (3.5)
The initial set of parameters defined by the designer allows the designer to
determine the second set of parameters with ranging values. Values at their maximum
and minimum are interchanged and allow for various tradeoffs in the performance of
the SMPS. These tradeoff are evaluated in later on in this section of this research. The
resulting full set of parameters are applicable to all evaluated frequencies in this
testing and are summed up in Table 3.3 below.
Table 3.3 Initial and Calculated Design Parameters
Initial Parameters
𝑉𝑜𝑢𝑡 24 V
𝑉𝑟𝑖𝑝 .48V (2%)
𝑓𝑠 200kHz
800kHz
1.4MHz
2MHz
𝑃𝑜𝑢𝑡 24 W
Calculated Parameters
𝐼𝑜 .05 A – 1 A
𝑅𝐿 24Ω – 430Ω
𝑃𝑜 1.2W – 24W
𝑉𝑖𝑛 1.92 V – 4.8 V
𝐷 .8 – .92
𝜂𝐷 40% - 100%
3.1.3 Component calculation
The next step in the design method is to determine the time parameters of the
system. The time parameters are dependent on the switching frequency of the system.
For the purpose of all testing conducting in this thesis, the following set of DC/DC
boost converter operation variables are analyzed.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
19
Table 3.4 Converts for Testing
Converter A
𝑓𝑠 200kHz
Duty Cycle 80%
Converter B
𝑓𝑠 200kHz
Duty Cycle 92%
Converter C
𝑓𝑠 800kHz
Duty Cycle 80%
Converter D
𝑓𝑠 800kHz
Duty Cycle 92%
Converter E
𝑓𝑠 1.4MHz
Duty Cycle 80%
Converter F
𝑓𝑠 1.4MHz
Duty Cycle 92%
Converter G
𝑓𝑠 2MHz
Duty Cycle 80%
Converter H
𝑓𝑠 2MHz
Duty Cycle 92%
The variable 𝑇𝑠 represents the period of the switching frequency and is
calculated with equation; 𝑇𝑠 =1
𝑓𝑠. The on and off period (𝑇𝑜𝑛/𝑜𝑓𝑓) of the switch in the
SMPS is determined by the duty cycle of the system and the switching period. The
resulting switching periods and on and off periods are calculated for each frequency
and shown below.
Table 3.5 Calculated Switching Periods
Switching Period Equations
Switching Period 𝑇𝑠 =
1
𝑓𝑠
On Period of Switch 𝑇𝑜𝑛 = 𝐷 × 𝑇𝑠
Off Period of Switch 𝑇𝑜𝑓𝑓 = (1 − 𝐷) × 𝑇𝑠

Texas Tech University, Madelyn Bailey Ulferts, December 2015
20
Switching Period Calculations Switching Frequency 200kHz 800kHz 1.4MHz 2MHz
Duty Cycle 80% 92% 80% 92% 80% 92% 80% 92%
𝑇𝑠 5µs 1.25µs .714µs .5µs
𝑇𝑜𝑛 4µs 4.6µs 1µs 1.15µs .571µs .657µs .4µs .46µs
𝑇𝑜𝑓𝑓 1µs .4µs .25µs .1µs .143µs .54µs .1µs .04µs
There are many proposed methods for calculating the required inductance for a
boost DC/DC SMPS. All methods have their own tradeoffs that are dependent on
factors such as load percent or efficiency needed. For testing in this thesis, the
minimum inductor values will be calculated with equation 3.6.
𝐿𝑚𝑖𝑛 =(1−𝐷)2×𝐷×𝑅𝐿
2×𝑓𝑠 (3.6)
When examining the inductor equation, it is concluded that as the 𝑅𝐿 increases, the
minimum inductor size will also increase. The effect of the inductance value size will
be examined in this chapter as well as in Chapter IV.
The peak to peak ripple current will determine which MOSFET, inductor, and
capacitor peak current values are acceptable for use in the calculated duty cycle, input
voltage, and minimum inductor ranges. The peak to peak ripple current (∆𝐼𝐿) is
calculated with equation 3.7.
∆𝐼𝐿 =𝑉𝑖𝑛×𝐷
𝑓𝑠×𝐿 (3.7)
The peak to peak ripple current calculated, will now allow for the inductor RMS
current to be calculated. When selecting an inductor, the inductor maximum RMS
current is crucial. The inductor maximum RMS current is dependent on the duty cycle
of the system, input voltage, and peak to peak ripple current as shown in equation 3.8.
𝐼𝐿,𝑅𝑀𝑆 = √(𝑃𝑜
𝑉𝑖𝑛)
2
+∆𝐼𝐿
2
12 (3.8)

Texas Tech University, Madelyn Bailey Ulferts, December 2015
21
The next component to be calculated and characterized is the MOSFET for
switching purpose in the system. The inductor leads into the junction for the
MOSFET, therefore the key current equation for selecting the MOSFET is the
maximum inductor peak to peak ripple current (∆𝐼𝐿(max)). This equation allows the
inductor switching peak ripple current (𝐼𝑠𝑤(𝑝𝑘)) to be calculated from equation X.
These equations help determine the needed resistance from drain to source in the on
state (𝑅𝐷𝑆(𝑜𝑛)) of the MOSFET.
𝐼𝑠𝑤(𝑝2𝑘) = √𝐷 (𝑃𝑜
𝑉𝑖𝑛)
2
+∆𝐼𝐿
2
12 (3.9)
The switching peak current is critical. The inductor, MOSFET, and diode must
be able to withstand this current. Once the switching peak to peak current has been
determined, the desired 𝑅𝐷𝑆(𝑜𝑛) of the MOSFET can be calculated. Equation X is used
to calculate 𝑅𝐷𝑆(𝑜𝑛). When determining the 𝑅𝐷𝑆(𝑂𝑁) value of the MOSFET, the
designer should chose a value that causes the conduction power dissipation to be 1%
of the total output power of the system. This ensures that the maximum MOSFET
drain current that is acceptable is highly greater than the drain current that will occur
in reality. For the purpose of this simulation, arbitrary conduction losses are assumed
to be 1%.
𝑅𝐷𝑆(𝑜𝑛) =𝑃𝑜𝑢𝑡×.01
𝐼𝐿,𝑅𝑀𝑆 (3.10)
After the inductor and MOSFET junction, the current in the system must pass
through a diode. The needed diode RMS current is critical for selecting the diode. The
diode RMS current is calculated in equation 3.11.
𝐼𝑑,𝑅𝑀𝑆 = √(1 − 𝐷) (𝑃𝑜
𝑉𝑖𝑛)
2
+∆𝐼𝐿
2
12 (3.11)
For selecting the capacitor, the capacitance value and the ESR value must be
determined. Equation 3.12 calculates the minimum capacitance value which is

Texas Tech University, Madelyn Bailey Ulferts, December 2015
22
dependent on the duty cycle and the voltage ripple of the system (𝑉𝑟). The voltage
ripple has previously been defined by the designer to be .48V.
𝐶𝑚𝑖𝑛 =𝐷
𝑅𝐿×𝑓𝑠×𝑉𝑟=
𝐷
𝑅𝐿×𝑓𝑠×.48 (3.12)
Once the capacitor minimum value is determined, the needed ESR value and
RMS current for the capacitors are calculated. The ESR of the capacitor is determined
by the switch peak to peak ripple current and ripple voltage in the system. The RMS
current of the capacitor is dependent on the output current and the diode RMS current.
These equations are shown below.
𝐸𝑆𝑅 =𝑉𝑟
𝐼𝑠𝑤(𝑝𝑘) (3.13)
𝐶𝑅𝑀𝑆 = √𝐼𝑑,𝑅𝑀𝑆2 − 𝐼𝑜(max)
2 (3.14)

Texas Tech University, Madelyn Bailey Ulferts, December 2015
23
CHAPTER IV
ANALYSIS I OF SMPS DESIGN
The first test will analyze the recommended inductor and output capacitor at
the minimum recommended values and the output capacitor ESR at the maximum
recommended value. For each switching frequency, the duty cycles will be tested at
80% and 92%. This will allow comparison of the effect of duty cycle and switching
frequency on component selections and their result EMI effect.
4.1 Design Values
The four switching frequencies are selected in the range of 200kHz to 2MHz
with 600kHz step between each switching frequency. This resulted in switching
frequencies of 200kHz, 800MHz, 1.4MHz, and 2MHz. Each switching frequency will
be evaluated at the maximum and minimum duty cycles of 80% and 92%. The
selected duty cycle will affect the input voltage in the system. For operation at 80%
duty cycle, the input voltage will be 4.8V with the output voltage remaining at 24V.
When the duty cycle in increased to 92%, the input voltage will decrease to 1.92V in
order for the output voltage to remain 24V. Increasing the duty cycle also effects the
component minimum values in the system.
4.2 Output response
The output voltage is to remain a constant of 24V. In order for the output
voltage to be 24V, the output power divided by the output current must always equal
24V. The equation for output power is broken down to; 𝑃𝑜𝑢𝑡 = 𝑉𝑜𝑢𝑡 × 𝐼𝑜𝑢𝑡 = (𝑅𝐿 ×
𝐼𝑜𝑢𝑡) × 𝐼𝑜𝑢𝑡. Therefore, the output power and output current will change as the load
resistance changes. The output power, current, and load are not dependent on
switching frequency or duty cycle. This allows the effect of load resistance on the
output current and power to be constant over all switching frequencies and duty cycle.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
24
Table 4.1 sums up the resulting effect of load resistance on output current and power
for all switching frequencies and duty cycles.
Table 4.1 Effect of Load Resistance on Converter Output
𝑹𝑳(𝛀) 𝑰𝒐𝒖𝒕(𝑨) 𝑷𝒐𝒖𝒕(𝑾)
24 1 24
50 .48 11.52
75 .32 7.68
100 .24 5.76
125 .192 4.6
150 .16 3.84
175 .137 3.29
200 .12 2.88
225 .1 2.56
250 .096 2.3
275 .087 2.09
300 .08 1.92
325 .07 1.77
350 .068 1.64
375 .064 1.53
400 .06 1.44
430 .055 1.34
4.3 Component Values
For a selected duty cycle, the load resistance will affect the minimum
component values and current values occurring in the system. The first components to
be selected are the MOSFET and diode. It is the goal to select these components to be
able to operate for all testing of the changing switching frequency, duty cycle, and
load resistance. This allows for more appropriate real world application where the
DC/DC Converter will be operational in a large application rage. Selection of the
MOSFET and diode is dependent on the ∆𝐼𝐿, 𝑅𝐷𝑆(𝑜𝑛), 𝐼𝑠𝑤(𝑝2𝑝), and 𝐼𝑑,𝑅𝑀𝑆 of the
system operating under the various operation variables of the system. Table 4.2 sums
up these values for each switching frequency, duty cycle, and load resistance.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
25
Table 4.2 Switch and MOSFET Operating Values
200kHz Switching Frequency
80% Duty Cycle 92% Duty Cycle
𝑹𝑳(𝛀) ∆𝑰𝑳(A) 𝑰𝒔𝒘(𝒑𝟐𝒑)(𝑨) 𝑹𝑫𝑺(𝒐𝒏)(𝛀) 𝑰𝒅,𝑹𝑴𝑺(𝑨) ∆𝑰𝑳(A) 𝑰𝒔𝒘(𝒑𝟐𝒑)(𝑨) 𝑹𝑫𝑺(𝒐𝒏)(𝛀) 𝑰𝒅,𝑹𝑴𝑺(𝑨)
24 10 5.32 41.57 3.65 14.43 13.4 18 8.04
50 4.8 2.55 86.6 1.75 6.92 6.71 34.64 3.85
75 3.2 1.7 129.9 1.16 4.61 4.47 51.96 2.57
100 1.38 1.27 173.2 .87 3.46 3.35 69.28 1.92
125 1.1 1.02 216.5 .7 2.77 2.68 86.6 1.54
150 .92 .85 259.8 .58 2.3 2.23 103 1.28
175 .79 .72 303 .5 1.97 1.91 121.2 1.1
200 .69 .63 346 .43 1.73 1.67 138.6 .96
225 .61 .56 389 .38 1.54 1.49 155.9 .857
250 .55 .51 433 .35 1.38 1.34 173.2 .77
275 .5 .46 476 .31 1.25 1.22 190.5 .7
300 .46 .42 519 .29 1.15 1.12 207 .64
325 .426 .39 562.9 .26 1.06 1.03 225 .59
350 .39 .36 606 .25 .98 .95 242 .55
375 .36 .34 649 .23 .92 .89 259 .51
400 .34 .31 692 .21 .866 .84 277 .48
430 .32 .29 744 .2 .8 .78 297 .44
800kHz Switching Frequency
80% Duty Cycle 92% Duty Cycle
𝑹𝑳(𝛀) ∆𝑰𝑳(A) 𝑰𝒔𝒘(𝒑𝟐𝒑)(𝑨) 𝑹𝑫𝑺(𝒐𝒏)(𝛀) 𝑰𝒅,𝑹𝑴𝑺(𝑨) ∆𝑰𝑳(A) 𝑰𝒔𝒘(𝒑𝟐𝒑)(𝑨) 𝑹𝑫𝑺(𝒐𝒏)(𝛀) 𝑰𝒅,𝑹𝑴𝑺(𝑨)
24 5.77 5.3 41.57 3.65 14.4 13.9 18 8.03
50 2.77 2.55 86.6 1.75 6.9 6.7 34.64 3.85
75 1.84 1.7 129.9 1.16 4.6 4.47 51.96 2.57
100 1.38 1.27 173 .87 3.46 3.35 69.28 1.92
125 1.1 1.02 216.5 .7 2.77 2.68 86.6 1.54
150 .92 .85 259 .58 2.3 2.23 103 1.28
175 .79 .72 303 .5 1.97 1.91 121 1.1
200 .69 .63 346 .43 1.73 1.67 138 .96
225 .61 .56 389 .38 1.54 1.49 155 .857
250 .55 .51 433 .35 1.38 1.34 173 .77
275 .5 .46 476 .31 1.25 1.22 190 .7
300 .46 .42 519 .29 1.15 1.12 207 .64
325 .42 .39 562 .26 1.06 1.03 225 .59
350 .39 .36 606 .25 .98 .95 242 .55
375 .37 .34 649 .233 .92 .89 259 .51
400 .34 .31 692 .21 .866 .83 277 .48
430 .32 .29 744 .2 .8 .78 297 .44

Texas Tech University, Madelyn Bailey Ulferts, December 2015
26
1.4MHz Switching Frequency
80% Duty Cycle 92% Duty Cycle
𝑹𝑳(𝛀) ∆𝑰𝑳(A) 𝑰𝒔𝒘(𝒑𝟐𝒑)(𝑨) 𝑹𝑫𝑺(𝒐𝒏)(𝛀) 𝑰𝒅,𝑹𝑴𝑺(𝑨) ∆𝑰𝑳(A) 𝑰𝒔𝒘(𝒑𝟐𝒑)(𝑨) 𝑹𝑫𝑺(𝒐𝒏)(𝛀) 𝑰𝒅,𝑹𝑴𝑺(𝑨)
24 5.77 5.3 41.57 3.6 14.4 13.9 18 8.0
50 2.77 2.55 86.6 1.75 6.9 6.7 34.6 3.8
75 1.85 1.7 129.9 1.16 4.6 4.47 51.9 2.57
100 1.38 1.27 173.2 .87 3.46 3.35 69.3 1.92
125 1.1 1.0 216.5 .7 2.77 2.68 86.6 1.54
150 .92 .85 259.8 .58 2.3 2.23 103.9 1.28
175 .79 .72 303.1 .5 1.97 1.91 121.2 1.1
200 .69 .63 346 .43 1.73 1.67 138.6 .96
225 .61 .56 389 .38 1.5 1.49 155.9 .85
250 .55 .51 433 .35 1.38 1.34 173.2 .77
275 .5 .46 476 .31 1.25 1.22 190.5 .7
300 .46 .42 519 .29 1.15 1.2 207 .64
325 .42 .39 562 .26 1.06 1.03 225 .59
350 .39 .36 606 .25 .98 .95 242 .55
375 .36 .34 649.5 .23 .92 .89 259 .51
400 .34 .31 692 .21 .86 .83 277 .48
430 .32 .29 744 .2 .8 .78 297 .44
2MHz Switching Frequency
80% Duty Cycle 92% Duty Cycle
𝑹𝑳(𝛀) ∆𝑰𝑳(A) 𝑰𝒔𝒘(𝒑𝟐𝒑)(𝑨) 𝑹𝑫𝑺(𝒐𝒏)(𝛀) 𝑰𝒅,𝑹𝑴𝑺(𝑨) ∆𝑰𝑳(A) 𝑰𝒔𝒘(𝒑𝟐𝒑)(𝑨) 𝑹𝑫𝑺(𝒐𝒏)(𝛀) 𝑰𝒅,𝑹𝑴𝑺(𝑨)
24 5.77 5.32 41.57 3.65 14.43 13.9 16.63 8.03
50 2.77 2.55 86.6 1.75 6.9 6.7 34.64 3.85
75 1.85 1.7 129.9 1.17 4.6 4.47 51.96 2.57
100 1.38 1.27 173.2 .87 3.46 3.35 69.3 1.93
125 1.1 1.0 216.5 .7 2.77 2.68 86.6 1.54
150 .92 .85 259 .58 2.3 2.23 103.9 1.28
175 .79 .72 303 .5 1.97 1.9 121.2 1.1
200 .69 .63 346 .43 1.7 1.67 138.6 .96
225 .61 .56 389 .38 1.53 1.49 155.9 .85
250 .55 .51 433 .35 1.38 1.34 173.2 .77
275 .5 .46 476 .31 1.26 1.22 190.5 .7
300 .46 .42 519 .29 1.15 1.12 207 .64
325 .42 .39 562 .26 1 1 225 .59
350 .39 .36 606 .25 .98 .95 242 .55
375 .36 .34 649 .23 .92 .89 259 .51
400 .34 .31 692 .21 .86 .83 277 .48
430 .32 .29 744 .2 .8 .78 297 .44
For each switching frequency and duty cycle in the above table, the highest
value for the ∆𝐼𝐿, 𝑅𝐷𝑆(𝑜𝑛), 𝐼𝑠𝑤(𝑝2𝑝), and 𝐼𝑑,𝑅𝑀𝑆 are highlighted in turquoise. For all
switching frequencies and duty cycles, the maximum ∆𝐼𝐿, 𝐼𝑠𝑤(𝑝2𝑝), and 𝐼𝑑,𝑅𝑀𝑆 occur at

Texas Tech University, Madelyn Bailey Ulferts, December 2015
27
the minimum 𝑅𝐿of 24Ω while the maximum 𝑅𝐷𝑆(𝑜𝑛) occurs at the maximum 𝑅𝐿of
430Ω. For each switching frequency with 80% duty cycle, the maximum 𝑅𝐷𝑆(𝑜𝑛) is
744Ω. When the duty cycle is 92%, all switching frequencies maximum 𝑅𝐷𝑆(𝑜𝑛) is
297Ω. The values occurring before these common 𝑅𝐷𝑆(𝑜𝑛) are not equal for all
switching frequencies operating in the same duty cycle. This pattern occurs again for
minimum 𝑅𝐷𝑆(𝑜𝑛). For all switching frequencies with a duty cycle of 80%, the
minimum 𝑅𝐷𝑆(𝑜𝑛) is 41.57 for a load resistance of 24Ω. When the duty cycle increased
to 92%, the minimum 𝑅𝐷𝑆(𝑜𝑛) is 18 for a load resistance of 24Ω. This tells us that for
all switching frequency and duty cycle cases, when the load is at the minimum or
maximum, the 𝑅𝐷𝑆(𝑜𝑛) will become equal for all switching frequencies across a
common duty cycle with the used designer inputs.
When selecting a MOSFET, the designer must take into account the
breakdown voltage, power dissipation, and 𝑅𝐷𝑆(𝑜𝑛) of the component and if it will be
the best values for the converter. A desirable breakdown voltage should be 1.5 times
the level of output voltage. In operation mode, it must be verified that the spikes from
the voltage drain are below the MOSFET breakdown voltage. For MOSFET
capacitance, the lower the capacitance value then the lower amount of switching loss
that will occur. The best method for selecting a MOSFET is to select one where during
maximum load, the switching losses will be approximately equal to the conduction
losses. When selecting a single MOSFET for use in all applications, the 𝑅𝐷𝑆(𝑜𝑛) must
be less than the minimum 𝑅𝐷𝑆(𝑜𝑛) that will occur in the system. For this testing, the
minimum 𝑅𝐷𝑆(𝑜𝑛) for an 80% duty cycle will be 41.57, while the minimum 𝑅𝐷𝑆(𝑜𝑛) for
a 92% duty cycle will be 18. The 𝑅𝐷𝑆(𝑜𝑛) of a MOSFET is controlled by the gate
voltage. This allows the user to select a MOSFET suitable for all applications and
dependent on the gate voltage. For this testing, the Si4416DY MOSFET is selected.
The Si4416DY MOSFET is an N-Channel 30-V (D-S) MOSFET. Table 4.3 sums up
the key 𝑅𝐷𝑆(𝑜𝑛) characteristics of the selected MOSFET.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
28
Table 4.3 Si4416DY MOSFET Data
𝑽𝑫𝑺(𝑽) 𝑹𝑫𝑺(𝒐𝒏)(Ω) 𝑰𝑫(𝑨)
30V 18m @ 𝑉𝐺𝑆 = 10𝑉 9
28m @ 𝑉𝐺𝑆 = 4.5𝑉 7.3
The diodes selected for SMPS used in this study are Schottky diodes with low
output voltage and capacitance. The selected diode must be able to withstand the peak
input current of the capacitor and be able to dissipate its voltage drop multiplied by the
load current. When deciding on the voltage breakdown of the diode, a value must be
selected that is greater than the output voltage. EMI is minimized in CCM operation
with diodes with soft recovery characteristics. The forward current of the diode must
be greater than the output current appearing in the system. The maximum output
current to occur in the system is 1A. The breakdown voltage must be greater than the
output voltage of the system. Therefore, the diode must have a breakdown voltage
greater than 24V and a forward current greater than 1A. The selected diode for all
applications is the B530C Schottky diode. This diode is from Diodes Inc. and has an
average forward current of 5A and a breakdown voltage of 30V.
The inductor, capacitor, and ESR values are determined using the equations in
Chapter III. For initial testing, the inductor, capacitor, and ESR values will be selected
as the minimum values for a certain switching frequency, duty cycle, and load
resistance. For quick calculations, Excel was used to determine each minimum value
for the set determinants. The resulting minimum values is summed up in Table 4.4.
Table 4.4 Component Calculations
200kHz Switching Frequency
80% Duty Cycle 92% Duty Cycle
𝑹𝑳(𝛀) 𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) 𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) 24 1.92 3.5 .09 .35 4 .034
50 4 1.67 .18 .74 1.9 .07
75 6 1.2 .28 1.2 1.28 .1
100 8 .83 .375 1.5 .96 .14
125 10 .67 .46 1.9 .77 .18
150 12 .56 .56 2.3 .7 .22

Texas Tech University, Madelyn Bailey Ulferts, December 2015
29
175 14 .48 .657 2.6 .55 .25
200 16 .42 .75 3 .48 .28
225 18 .37 .84 3.4 .43 .3
250 20 .34 .93 3.7 .38 .38
275 22 .31 1 4.05 .35 .43
300 24 .28 1.12 4.5 .32 .5
325 26 .26 1.2 5 .28 .52
350 28 .24 1.3 5.2 .26 .55
375 30 .23 1.4 5.5 .25 .56
400 32 .21 1.5 5.9 .21 .58
430 34.4 .2 1.6 6.4 .22 .6
800kHz Switching Frequency 80% Duty Cycle 92% Duty Cycle
𝑹𝑳(𝛀) 𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) 𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) 24 .48 .9 .09 .089 1 .034
50 1 .42 .18 .184 .48 .07
75 1.5 .28 .28 .28 .32 .1
100 2 .21 .375 .37 .24 .14
125 2.5 .17 .46 .46 .2 .18
150 3 .14 .56 .56 .16 .22
175 3.5 .12 .657 .65 .14 .25
200 4 .11 .75 .74 .12 .28
225 4.5 .1 .84 .83 .11 .3
250 5 .09 .93 .92 .096 .38
275 5.5 .08 1 1 .09 .43
300 6 .06 1.12 1.2 .08 .5
325 6.5 .055 1.2 1.25 .075 .52
350 7 .054 1.3 1.3 .07 .55
375 7.5 .052 1.4 1.4 .065 .56
400 8 .05 1.5 1.5 .06 .58
430 8.6 .049 1.6 1.6 .057 .6
1.4MHz Switching Frequency 80% Duty Cycle 92% Duty Cycle
𝑹𝑳(𝛀) 𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) 𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) 24 0.28 0.5 .09 0.05 0.57 .034
50 0.58 0.24 .18 0.11 0.28 .07
75 0.86 0.16 .28 0.16 0.185 .1
100 1.15 0.12 .375 0.21 0.13 .14
125 1.5 0.096 .46 0.27 0.11 .18
150 1.72 0.08 .56 0.32 0.095 .22
175 2 0.07 .657 0.37 0.08 .25
200 2.3 0.06 .75 0.43 0.07 .28
225 2.6 0.055 .84 0.48 0.065 .3
250 2.86 0.05 .93 0.53 0.055 .38
275 3.15 0.045 1 0.58 0.05 .43
300 3.45 0.04 1.12 0.64 0.046 .5
325 3.8 0.39 1.2 0.7 0.042 .52

Texas Tech University, Madelyn Bailey Ulferts, December 2015
30
350 4 0.035 1.3 0.74 0.04 .55
375 4.4 0.032 1.4 0.8 0.038 .56
400 4.6 0.03 1.5 0.85 0.034 .58
430 4.92 0.028 1.6 0.91 0.032 .6
2MHz Switching Frequency 80% Duty Cycle 92% Duty Cycle
𝑹𝑳(𝛀) 𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) 𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) 24 0.195 0.35 .09 0.035 0.4 .034
50 0.4 0.17 .18 0.075 0.195 .07
75 0.6 0.12 .28 0.12 0.13 .1
100 0.8 0.085 .375 0.15 0.097 .14
125 1 0.07 .46 0.185 0.08 .18
150 1.2 0.06 .56 0.23 0.065 .22
175 1.4 0.05 .657 0.26 0.055 .25
200 1.6 0.045 .75 0.3 0.05 .28
225 1.8 0.04 .84 0.35 0.045 .3
250 2 0.035 .93 0.37 0.04 .38
275 2.2 0.03 1 0.41 0.036 .43
300 2.4 0.028 1.12 0.45 0.033 .5
325 2.6 0.026 1.2 0.5 0.032 .52
350 2.8 0.025 1.3 0.52 0.03 .55
375 3 0.022 1.4 0.58 0.028 .56
400 3.2 0.021 1.5 0.6 0.025 .58
430 3.5 0.019 1.6 0.65 0.023 .6
For the table above, the maximum values for each switching frequency and
duty cycle minimum inductor, capacitor, and maximum capacitor ESR values are
highlighted in turquoise. When examining these recommended values, there are
several conclusions that can be determined. For the particular design under test, the
ESR values will remain constant for all switching frequencies with the same duty
cycle. The highest minimum inductor and maximum capacitor ESR values will occur
at maximum load of 430Ω. The highest minimum capacitor value will occur at the
minimum load of 24Ω. Table 4.5 shows statistical analysis of each switching
frequency and duty cycle inductor, capacitor, and capacitor ESR values.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
31
Table 4.5 Statistical Component Variables
200kHz Switching Frequency
80% Duty Cycle 92% Duty Cycle
𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) 𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) Average 18.01882 0.692353 0.837765 3.367059 0.784706 0.319412 Median 18 0.37 0.84 3.4 0.43 0.31
Standard
Deviation 9.844438 0.799901 0.458407 1.819052 0.913076 0.179328
800kHz Switching Frequency
80% Duty Cycle 92% Duty Cycle
𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) 𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) Average 4.504706 0.174118 0.837765 0.843118 0.197824 0.319412 Median 4.5 0.1 0.84 0.83 0.11 0.31
Standard
Deviation 2.46111 0.204818 0.458407 0.464364 0.227794 0.179328
1.4MHz Switching Frequency
80% Duty Cycle 92% Duty Cycle
𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) 𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) Average 2.598235 0.119471 0.837765 0.479412 0.113059 0.319412 Median 2.6 0.06 0.84 0.48 0.065 0.31
Standard
Deviation 1.417169 0.131564 0.458407 0.261184 0.13025 0.179328
2MHz Switching Frequency
80% Duty Cycle 92% Duty Cycle
𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) 𝑳(𝝁𝑯) 𝑪(𝝁𝑭) 𝑪𝑬𝑺𝑹(𝛀) Average 1.805588 0.070353 0.837765 0.340294 0.080235 0.319412 Median 1.8 0.04 0.84 0.35 0.045 0.31
Standard
Deviation 0.990113 0.080075 0.458407 0.186165 0.091045 0.179328
It is concluded form the tables 4.4 and 4.5 that there are common appearing
patters among the statistical analysis of the minimum inductor, capacitor, and
maximum capacitor ESR for each switching frequency and duty cycle. As the
switching frequency is increased, the highest minimum inductor value will decrease.
Along with this conclusion, the average, median, and standard deviation of all
minimum inductor values will decrease as the switching frequency decreased. When
viewing across common switching frequencies, it is apparent that as the duty cycle
increases, the average, median, and standard deviation of the inductor will decrease.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
32
When examining the patterns with the minimum capacitor values, it is noticeable that
as the switching frequency increases, the average, median, and standard deviation of
the capacitor values will decrease. As the duty cycle across a single switching
frequency is increased, the average, median, and standard deviation capacitor values
will increase. For all switching frequencies operating with an equal duty cycle, the
average, median, and standard deviation capacitor ESR maximum values will be
equal.
4.4 Results
After reviewing the pattern for recommended minimum inductor and capacitor
values and maximum capacitor ESR values, it is time to test each switching frequency
and duty cycle recommended minimum design values. Each case for switching
frequency and duty cycle was examined to see the EMI effect on the input to the
DC/DC boost converter. The results of these cases are summed up in Table 4.7.
Table 4.7 EMI Result of Simulated Converter
200kHz Switching Frequency Duty Cycle 80% 92%
𝑹𝑳(𝛀) Emission Level(dB)
24 9.2 -2.6
50 9.6 -1.98
75 9.65 0.87
100 9.56 1.13
125 9.45 1.58
150 9.59 1.64
175 9.68 1.79
200 9.86 1.84
225 9.65 1.89
250 9.54 1.9
275 9.53 2
300 9.5 2.002
325 9.42 2.006
350 9.35 2.01
375 9.33 1.99
400 9.29 1.98
430 9.28 1.97
800kHz Switching Frequency
Duty Cycle 80% 92%
𝑹𝑳(𝛀) Emission Level(dB)
24 9.1 -3.4

Texas Tech University, Madelyn Bailey Ulferts, December 2015
33
50 9.5 -1.93
75 9.6 -0.46
100 9.63 0.77
125 9.6 -0.24
150 9.55 -1.25
175 9.5 1.42
200 9.45 -0.2
225 9.38 -1.82
250 9.29 1.69
275 9.2 1.72
300 9.13 1.75
325 9 1.8
350 8.95 1.84
375 8.8 1.86
400 8.76 1.89
430 8.64 1.91
1.4MHz Switching Frequency
Duty Cycle 80% 92%
𝑹𝑳(𝛀) Emission Level(dB)
24 6.74 -5.97
50 7.1 -1.47
75 7.15 -1.53
100 7.18 -1.66
125 7.2 -1.01
150 7.14 -0.36
175 7.2 -1
200 9 -1.62
225 9.5 -2.24
250 9.6 -0.758
275 9.2 -1.718
300 9.3 -2.678
325 9.35 -3.638
350 9.4 -0.6
375 9.35 -0.58
400 9.3 -0.56
430 9 -0.54
2MHz Switching Frequency
Duty Cycle 80% 92%
𝑹𝑳(𝛀) Emission Level(dB)
24 8.5 -5.16
50 8.99 -4.5
75 9.12 -2.9
100 9.2 -0.33
125 9.17 -0.65
150 9.16 0.25
175 9.14 0.528
200 9.12 0.62

Texas Tech University, Madelyn Bailey Ulferts, December 2015
34
225 9.07 0.76
250 9.02 0.894
275 8.99 0.96
300 8.9 1.06
325 8.8 1.1
350 8.77 1.145
375 8.7 1.2
400 8.6 1.24
430 8.48 1.26
When viewing the effect of each load increase in the emission level, it is seen
that the emission level will increase until a pivot load point, at which the emission
level will start to decrease for each load change. For 200kHz and 800kHz switching
frequencies operating at an 80% duty cycle, the pivot point will occur for a load of
200Ω which is a 43% load. For switching frequencies of 1.4MHz and 2MHz operating
with a duty cycle of 80%, the pivot point will occur at a 250Ω load which is a 55%
load. When the duty cycle is increased to 92%, the pivot point for 200kHz, 800kHz,
and 1.4MHz will occur when the load is 350Ω or 80% load. When the switching
frequency is 2MHz and the duty cycle is 92%, no pivot point occurs in the changing
load. Statistical methods are now used to better analyze the resulted EMI level for the
evaluated duty cycle and switching frequency cases. Table 4.8 shows the statistical
results of the changing switching frequencies, duty cycle, and load resistance.
Table 4.8 Statistical Results of EMI Levels
200kHz Switching Frequency
Duty Cycle 80% 92%
Emission Level(dB)
Average 9.49 1.29
Median 9.53 1.89
Standard Deviation .16 1.35
200kHz Switching Frequency
Duty Cycle 80% 92%
Emission Level(dB)
Average 9.24 .43
Median 9.29 1.42
Standard Deviation .313 1.64
1.4MHz Switching Frequency
Duty Cycle 80% 92%
Emission Level(dB)

Texas Tech University, Madelyn Bailey Ulferts, December 2015
35
Average 8.39 -1.37
Median 9 -1.01
Standard Deviation 1.09 1.75
2MHz Switching Frequency
Duty Cycle 80% 92%
Emission Level(dB)
Average 8.92 -.15
Median 8.99 .76
Standard Deviation .23 1.98
When inspecting the results of Table 4.8, several conclusions can be made. The
average emission level and median emission level for megahertz switching
frequencies is less than those for kilohertz switching frequencies. Increasing the duty
cycle of the system will further decrease the EMI average and median value for all
switching frequencies. Of the cases studied, the best result for EMC regulation was
when the switching frequency was 1.4MHz and the duty cycle was 92%. This shows
that there is a set range with maximum and minimum switching frequency values that
will result in the strongest EMC compliance of the system.
The goal of the test conducted in this chapter was to evaluate DC/DC boost
converter EMI results at the most detailed level. Application for converters that will
only operate for a certain load, switching frequency, and duty cycle is not common in
todays engineering practice. It is desired for any system to be operable with a range of
conditions. This helps further increase the confidence of a system to meet EMC
standards when placed in interference with other system. Now that the detailed effect
of changing operation variables will effect a system, the next step is to design a system
that will operate as desired with changing variables.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
36
CHAPTER V
MODIFYED DESIGN OF SMPS
The second analysis of the Chapter III design method will focus on making a
broader application SMPS circuit. The new SMPS circuits will have the same
inductor, capacitor, and capacitor ESR value for all switching frequencies, duty cycles,
and load resistance. It is higher desired for a SMPS to be designed for more than one
load resistance, duty cycle, and switching frequency application. To achieve common
component values, the component calculation equations from Chapter III will be
changed.
5.1 Component calculation and selection
In order to determine the best component value for use in all switching
frequencies and duty cycles, common equations have to determined that will yield an
equal value for all cases. When observing the results of Chapter IV analysis, it is seen
that the switching frequency has a large effect on the EMI results of a converter. Due
to this observation, a set of equations was created to create a common variable among
all switching frequencies. This set of equations are summed up in Table 5.1.
Table 5.1 Modified Component Calculation Equations
Initial Calculations
𝑝𝑘 𝑓𝑠
1𝑘
𝐿min (𝑅𝐿max) (1 − 𝐷𝑚𝑖𝑛)2 × 𝐷𝑚𝑖𝑛 × 𝑅𝐿(max)
2 × 𝑓𝑠
∆𝐼𝐿𝑚𝑎𝑥 𝑉𝑖𝑛(max) × 𝐷𝑚𝑎𝑥
𝑓𝑠 × 𝐿min (𝑅𝐿max)
𝐼𝑠𝑤(𝑝2𝑘)𝑚𝑎𝑥
𝐼𝑠𝑤(𝑝2𝑘) = √𝐷𝑚𝑖𝑛 (𝑃𝑜
𝑉𝑖𝑛(max))
2
+∆𝐼𝐿𝑚𝑎𝑥
2
12
𝐶min (𝑅𝐿min) 𝐷𝑚𝑎𝑥
𝑅𝐿(min) × 𝑓𝑠 × .48
Components Calculations
Inductor 𝐿min (𝑅𝐿max)
100× 𝑝𝑘

Texas Tech University, Madelyn Bailey Ulferts, December 2015
37
Capacitor 𝐶min (𝑅𝐿min) × 𝑓𝑠 × 100
𝐶𝐸𝑆𝑅 𝑉𝑟𝑖𝑝
𝐼𝑠𝑤(𝑝2𝑘)𝑚𝑎𝑥
The common variable for switching frequencies was set at 1 kHz because that
is the lowest prefix multiplier of all used switching frequencies. The variable, 𝑝𝑘
represents the ratio of the switching frequency being used to the 1 kHz base frequency.
The maximum inductor peak to peak current (∆𝐼𝐿𝑚𝑎𝑥) is the maximum ∆𝐼𝐿 that will
appear in the system for all duty cycles of a single switching frequency. This values is
constant for changing duty cycles and load resistance in a single switching frequency
and will change value only if the switching frequency is changed. The maximum
switching current (𝐼𝑠𝑤(𝑝2𝑘)𝑚𝑎𝑥) is the highest switching current that will appear in a
converter for a constant switching frequency. The maximum switching current will
only change when the switching frequency is changed and will not depend on any
other variables of the converter. The inductor component value is calculated using the
maximum 𝐿𝑚𝑖𝑛 to be required in the system, which occurs at the load resistance of
430Ω. The inductor switching frequency is then related to the common switching
variable by use of the calculated variable, 𝑝𝑘. It was noticed in past experiments that
as the inductor increases, the EMI level will decrease. The inductor is therefore
multiplied by a factor to further minimize the EMI appearing in the system. The factor
of 100 was selected because it is the approximate ratio between the minimum
inductance at a duty cycle of 50% and the minimum inductance at duty cycles of 80%-
92%. The capacitor for the modified DC/DC Converter is calculated by using the
minimum required capacitance for all load resistance application. The capacitor is then
multiplied by 100 to equate to the inductor value increasing by a multiplication of 100.
The capacitor ESR value is calculated to be the minimum maximum ESR value
allowed. The minimum ESR max occurs when the load resistance is at its minimum of
24Ω. Using the maximum switching current (𝐼𝑠𝑤(𝑝2𝑘)𝑚𝑎𝑥) that will appear in the
system. By using the process of equations from Table 5.1, the effect of duty cycle and
load resistance on component values is depleted. Component values are then only

Texas Tech University, Madelyn Bailey Ulferts, December 2015
38
depended on switching frequency and then made common across all switching
frequencies by use of a common variable. This is proven in Table 5.2.
Table 5.2 Applied Modified Calculations
200kHz Switching Frequency Duty Cycle 80% 92%
𝑝𝑘 200𝑘
1𝑘= 200
200𝑘
1𝑘= 200
𝐿min(𝑅𝐿max)(𝐴) (1 − .8)2 × .8 × 430
2 × 200𝑘= 34.4
(1 − .8)2 × .8 × 𝑅𝐿(max)
2 × 200𝑘= 34.4
∆𝐼𝐿𝑚𝑎𝑥(𝐴) 4.8 × .92
200𝑘 × 34.4= .64
4.8 × .92
200𝑘 × 34.4= .64
𝐼𝑠𝑤(𝑝2𝑘)𝑚𝑎𝑥(𝐴)
√. 8 (24
4.8)
2
+. 642
12= 4.475 √. 8 (
24
4.8)
2
+. 642
12= 4.475
𝐶min(𝑅𝐿min)(µ𝐹) . 92
24 × 200𝑘 × .48= 4
. 92
24 × 200𝑘 × .48= .399
Inductor(𝝁𝑯) 34.4
100× 200 = 68.8
34.4
100× 200 = 68.8
Capacitor(𝝁𝑭) 4µ × 200𝑘 × 100 = 79.8 . 399µ × 2𝑘 × 100 = 79.8
𝑪𝑬𝑺𝑹(𝛀) . 48
4.475= .1
. 48
4.475= .1
800kHz Switching Frequency
Duty Cycle 80% 92%
𝑝𝑘 800𝑘
1𝑘= 800
800𝑘
1𝑘= 800
𝐿min(𝑅𝐿max)(𝐴) (1 − .8)2 × .8 × 430
2 × 800𝑘= 8.6
(1 − .8)2 × .8 × 430
2 × 800𝑘= 8.6
∆𝐼𝐿𝑚𝑎𝑥(𝐴) 4.8 × .92
800𝑘 × 8.6= .64
4.8 × .92
800𝑘 × 8.6= .64
𝐼𝑠𝑤(𝑝2𝑘)𝑚𝑎𝑥(𝐴)
√. 8 (24
4.8)
2
+. 642
12= 4.475 √. 8 (
24
4.8)
2
+. 642
12= 4.475
𝐶min(𝑅𝐿min)(µ𝐹) . 92
24 × 800𝑘 × .48= 1
. 92
24 × 800𝑘 × .48= 1
Inductor(𝝁𝑯) 8.6
100× 800 = 68.8
8.6
100× 800 = 68.8
Capacitor(𝝁𝑭) 1µ × 800𝑘 × 100 = 79.8 1µ × 800𝑘 × 100 = 79.8
𝑪𝑬𝑺𝑹(𝛀) . 48
4.475= .1
. 48
4.475= .1
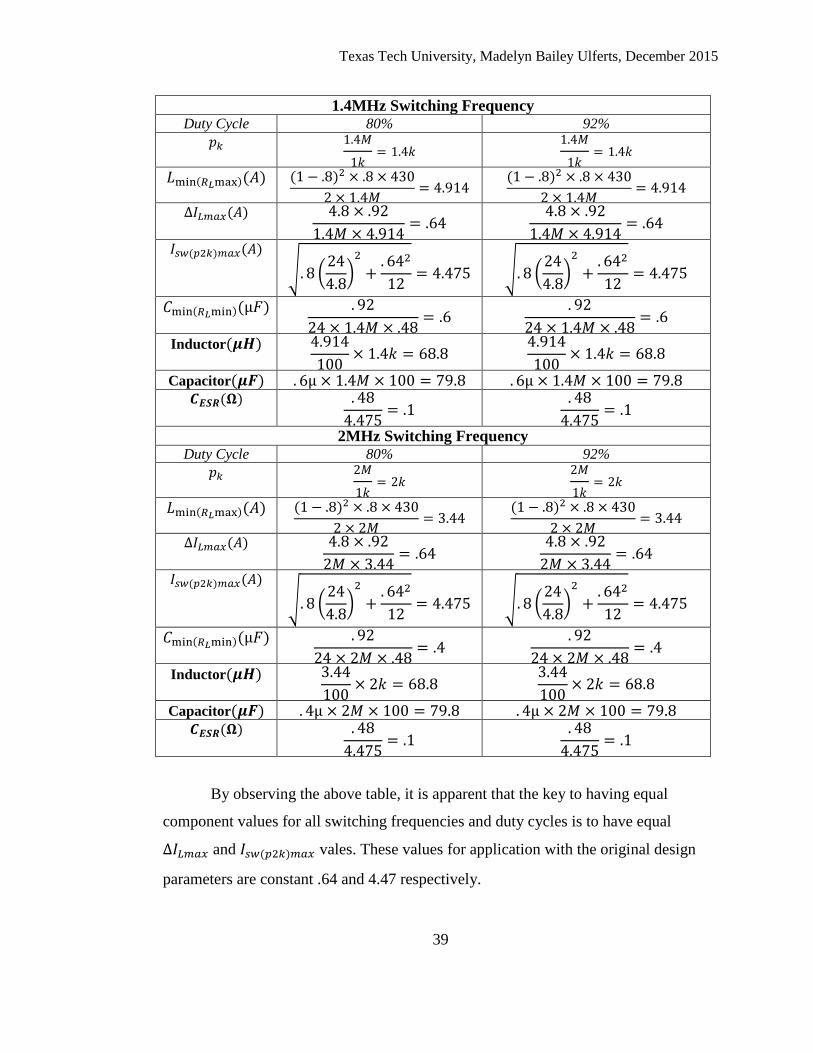
Texas Tech University, Madelyn Bailey Ulferts, December 2015
39
1.4MHz Switching Frequency Duty Cycle 80% 92%
𝑝𝑘 1.4𝑀
1𝑘= 1.4𝑘
1.4𝑀
1𝑘= 1.4𝑘
𝐿min(𝑅𝐿max)(𝐴) (1 − .8)2 × .8 × 430
2 × 1.4𝑀= 4.914
(1 − .8)2 × .8 × 430
2 × 1.4𝑀= 4.914
∆𝐼𝐿𝑚𝑎𝑥(𝐴) 4.8 × .92
1.4𝑀 × 4.914= .64
4.8 × .92
1.4𝑀 × 4.914= .64
𝐼𝑠𝑤(𝑝2𝑘)𝑚𝑎𝑥(𝐴)
√. 8 (24
4.8)
2
+. 642
12= 4.475 √. 8 (
24
4.8)
2
+. 642
12= 4.475
𝐶min(𝑅𝐿min)(µ𝐹) . 92
24 × 1.4𝑀 × .48= .6
. 92
24 × 1.4𝑀 × .48= .6
Inductor(𝝁𝑯) 4.914
100× 1.4𝑘 = 68.8
4.914
100× 1.4𝑘 = 68.8
Capacitor(𝝁𝑭) . 6µ × 1.4𝑀 × 100 = 79.8 . 6µ × 1.4𝑀 × 100 = 79.8 𝑪𝑬𝑺𝑹(𝛀) . 48
4.475= .1
. 48
4.475= .1
2MHz Switching Frequency Duty Cycle 80% 92%
𝑝𝑘 2𝑀
1𝑘= 2𝑘
2𝑀
1𝑘= 2𝑘
𝐿min(𝑅𝐿max)(𝐴) (1 − .8)2 × .8 × 430
2 × 2𝑀= 3.44
(1 − .8)2 × .8 × 430
2 × 2𝑀= 3.44
∆𝐼𝐿𝑚𝑎𝑥(𝐴) 4.8 × .92
2𝑀 × 3.44= .64
4.8 × .92
2𝑀 × 3.44= .64
𝐼𝑠𝑤(𝑝2𝑘)𝑚𝑎𝑥(𝐴)
√. 8 (24
4.8)
2
+. 642
12= 4.475 √. 8 (
24
4.8)
2
+. 642
12= 4.475
𝐶min(𝑅𝐿min)(µ𝐹) . 92
24 × 2𝑀 × .48= .4
. 92
24 × 2𝑀 × .48= .4
Inductor(𝝁𝑯) 3.44
100× 2𝑘 = 68.8
3.44
100× 2𝑘 = 68.8
Capacitor(𝝁𝑭) . 4µ × 2𝑀 × 100 = 79.8 . 4µ × 2𝑀 × 100 = 79.8 𝑪𝑬𝑺𝑹(𝛀) . 48
4.475= .1
. 48
4.475= .1
By observing the above table, it is apparent that the key to having equal
component values for all switching frequencies and duty cycles is to have equal
∆𝐼𝐿𝑚𝑎𝑥 and 𝐼𝑠𝑤(𝑝2𝑘)𝑚𝑎𝑥 vales. These values for application with the original design
parameters are constant .64 and 4.47 respectively.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
40
5.2 Results
The result of the design method for this chapter is a DC/DC converter with a
constant 68.8µH inductor, 79.86µF capacitor, and a .1Ω capacitor ESR. The goal of
designing a DC/DC Converter in the manor shown in this chapter is to increase the
application range for the DC/DC Converter by having a constant components for a
converter with alternate inputs and loads. The result of this method is shown in
Figures 5.1 – 5.8.
Figure 5.1 Simulation Results of Converter A before Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
41
Figure 5.2 Simulation Results of Converter B before Filter
Figure 5.3 Simulation Results of Converter C before Filter
Figure 5.4 Simulation Results of Converter D before Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
42
Figure 5.5 Simulation Results of Converter E before Filter
Figure 5.6 Simulation Results of Converter F before Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
43
Figure 5.7 Simulation Results of Converter G before Filter
Figure 5.8 Simulation Results of Converter H before Filter
The magnified results of Figures 5.1 – 5.8 around the switching frequency is
found in Appendix A. Table 5.3 shows the range of EMI levels around the used
switching frequency for each simulation

Texas Tech University, Madelyn Bailey Ulferts, December 2015
44
Table 5.3 EMI Results Before Filter
Switching
Frequency
200kHz 800kHz 1.4MHz 2MHz
Duty Cycle 80% 92% 80% 92% 80% 92% 80% 92% Max EMI(dB) 4.4 -4.4 -1.8 -11 -8.3 -17 -9.5 -20 Min EMI(dB) 3.35 -5.25 -2.85 -14 -9.8 -23 -10.6 -23.1
Concluding from the table above, the modified converter design method yields
a positive EMI result. It can be observed that as the duty cycle increased, the range
between the maximum EMI level and the minimum EMI level will increase as well.
This can affect the design of a system operating with multiple load resistance by the
inability to confidently know the EMI result from between maximum and minimum
load values. The EMI results are well improved but do not meet the standards for
CISPR22. In order to pass the CISPR22 requirements, an input filter must be applied
to the circuit.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
45
CHAPTER VI
FILTER APLLICATION FOR MODIFIED SMPS DESIGN
There are many types of input filters for SMPS. Each input filter design has its
own set of tradeoffs. These tradeoffs can be evaluated to determine which type of
input filter will be most beneficial for various applications. The basic filter topologies
are pi, T, and L.
When deciding the filter layout, the designer must consider the power and
signal flow of the system. The best filter designs are typically balanced by making the
filter thin and long to reduce the coupling capacitance and increase the impedance
occurring between input and output. The attenuation ability of the system decreases
when the SMPS is operating are the self-resonant frequency of the components. When
designing EMI filters, it is common not to focus on the line and load impedance of the
system being the same as the impedances for the designed filter, creating an
unmatched setup. These various basic principles for designing a SMPS input filter are
evaluated throughout this chapter.
6.1 Input filter topologies
The common input filters for use in DM suppression are the pi, T, and L filters.
The input filter is placed between the LISN and SMPS. Pi filters offer the advantage
of coupling with the LISN and increasing the order of the filter and are commonly
used in designs where there is a large bus cap connected to the output of the filter. The
T filter features an inductive input and output which benefits the input overshoot
voltage protection ability. Without the input capacitor, like the one used in a pi filter,
there is not a time delay in the charging which allows the voltage of the T filter to rise
faster. T filters are best used in situations where there are difficult lines present. The
key disadvantage of the T filter is the output connection to the SMPS. The capacitor
facing the SMPS in this topology can block some of the current and voltage flowing to
the SMPS when not properly designed. The L filter is a good compromise between the
pi and T filters. In typical L filter application, a double L may be needed. The

Texas Tech University, Madelyn Bailey Ulferts, December 2015
46
disadvantage of the L filter is the fact that it only has two elements which only allows
it to offer 12dB loss per octave. The design of these three filters are shown in Figures
6.1 through 6.3.
Figure 6.1 Pi Filter Schematic
Figure 6.2 L Filter Schematic
Figure 6.3 T Filter Schematic
6.2 Design process
There are many recommended methods for calculating the components for
input filter topologies. The common denominator for all filter design methods is to
determine the required level of attenuation needed for the system. This is
accomplished by first determining the initial level of EMI present in the system before
a filter is added. The method for determining the needed level of attenuation will vary
from method to method. After the common principle of first determining required
attenuation is completed, the remaining steps for the input filter design will change
from method to method. The used design process for this study is based off an
approach by Alfred Hesener in his research paper titled “Electromagnetic Interference
(EMI) in Power Supplies.” This design method uses the approach of adding multiple

Texas Tech University, Madelyn Bailey Ulferts, December 2015
47
filter stages until the design is at or below the required attenuation. For the purpose of
this research, only one filter stage will be used for evaluation. Heseners design method
will also simultaneously design a pi, T, and L filter.
The steps for design are summed up below.
1. Determine the parameters summed up in Table 6.1
Table 6.1 Filter Parameters
Minimum input voltage 𝑉𝑚𝑖𝑛 = 1.92𝑉
Max output current 𝐼𝑜𝑢𝑡(max) = 1𝐴
Switching frequency 𝑓𝑠𝑤
2. Calculate the design impedance (𝑍𝑑)
𝑍𝑑 =𝑉𝑖𝑛𝑚𝑖𝑛
∆𝐼𝐿𝑚𝑎𝑥=
1.92
1= 1.92 (6.1)
3. Select cut off frequency (𝑓𝑐𝑢𝑡) in the range of 𝑓𝑠(.01 𝑡𝑜 .1)
4. Calculate the capacitor and inductor vales using the equations below
𝐿𝑓 =𝑍𝑑
2𝜋𝑓𝑐𝑢𝑡 (6.2)
𝐶𝑓 =1
2𝜋𝑓𝑐𝑢𝑡𝑍𝑑 (6.3)
5. Use the table below to calculate the inductor and capacitor values for each input filter
topology
Table 6.2 Filter Component Equations
Pi Filter
Inductor 𝐿𝑓
Capacitors 𝐶𝑓1 = 𝐶𝑓2 =
𝐶𝑓
2
T Filter
Inductors 𝐿𝑓1 = 𝐿𝑓2 =
𝐿𝑓
2
Capacitor 𝐶𝑓
L Filter
Inductor 𝐿𝑓
Capacitor 𝐶𝑓
6. Apply calculated components to the appropriate input filter design and test results to
determine if another stage needs to be added.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
48
6.2.1 Applied filter process
Components need to be large enough to be able to handle the peak currents
occurring in the system and provide sufficient damping. However, the components
should not be so large that it would lower the self-resonant frequency, which is
dependent on the parasitic capacitance and inductance. This must be taken into
consideration when viewing the resulting component recommended values. The steps
stated in the section above are now to be applied to the various switching frequency
and duty cycle designs as shown below.
Table 6.3 Filter Component Calculations
Minimum input voltage 𝑉𝑚𝑖𝑛 = 1.92𝑉
Max output current 𝐼𝑜𝑢𝑡(max) = 1𝐴
Switching frequency 𝑓𝑠𝑤
𝑍𝑑 𝑉𝑖𝑛𝑚𝑖𝑛
∆𝐼𝐿𝑚𝑎𝑥=
1.92
1= 1.92
200kHz Switching Frequency
𝑓𝑐𝑢𝑡 200𝑘(. 05) = 10𝑘
𝐿𝑓 𝐿𝑓 =
1.92
2𝜋10𝑘= 30.5𝜇𝐻
𝐿𝑓1, 𝐿𝑓2 𝐿𝑓1 = 𝐿𝑓2 =
30.5𝜇𝐻
2= 15.25𝜇𝐻
𝐶𝑓 𝐶𝑓 =
1
2𝜋10𝑘(1.92)= 8.29𝜇𝐹
𝐶𝑓1, 𝐶𝑓2 𝐶𝑓1 = 𝐶𝑓2 =
8.29𝜇
2= 4.14𝜇𝐹
800kHz Switching Frequency
𝑓𝑐𝑢𝑡 800𝑘(. 05) = 40𝑘
𝐿𝑓 𝐿𝑓 =
1.92
2𝜋40𝑘= 7.6𝜇𝐻
𝐿𝑓1, 𝐿𝑓2 𝐿𝑓1 = 𝐿𝑓2 =
7.6𝜇𝐻
2= 3.8𝜇𝐻
𝐶𝑓 𝐶𝑓 =
1
2𝜋40𝑘(1.92)= 2.07𝜇𝐹
𝐶𝑓1, 𝐶𝑓2 𝐶𝑓1 = 𝐶𝑓2 =
2.07𝜇
2= 1.03𝜇𝐹
1.4MHz Switching Frequency
𝑓𝑐𝑢𝑡 1.4𝑀(. 05) = 70𝑘
𝐿𝑓 𝐿𝑓 =
1.92
2𝜋70𝑘= 4.36𝜇𝐻

Texas Tech University, Madelyn Bailey Ulferts, December 2015
49
𝐿𝑓1, 𝐿𝑓2 𝐿𝑓1 = 𝐿𝑓2 =
4.36𝜇𝐻
2= 2.18𝜇𝐻
𝐶𝑓 𝐶𝑓 =
1
2𝜋70𝑘(1.92)= 1.18𝜇𝐹
𝐶𝑓1, 𝐶𝑓2 𝐶𝑓1 = 𝐶𝑓2 =
1.18𝜇
2= .59𝜇𝐹
2MHz Switching Frequency
𝑓𝑐𝑢𝑡 2𝑀(. 05) = 100𝑘
𝐿𝑓 𝐿𝑓 =
1.92
2𝜋100𝑘= 3.05𝜇𝐻
𝐿𝑓1, 𝐿𝑓2 𝐿𝑓1 = 𝐿𝑓2 =
3.05𝜇𝐻
2= 1.52𝜇𝐻
𝐶𝑓 𝐶𝑓 =
1
2𝜋100𝑘(1.92)= .83𝜇𝐹
𝐶𝑓1, 𝐶𝑓2 𝐶𝑓1 = 𝐶𝑓2 =
. 83𝜇
2= .41𝜇𝐹
6.3 Results
Out of the past two tests, the best results occurred when the common
component values were applied to the various switching frequency and duty cycle
converters. The Pi, T, and L filters are now applied to those circuits to further improve
the EMI level and help determine which filter is best for various switching frequency
and duty cycles converters designed with the method presented in this thesis. The
simulation results of the filters application to each converter design tested is shown in
the figures below.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
50
Figure 6.4 Simulation Results of Converter A with Pi Filter
Figure 6.5 Simulation Results of Converter A with L Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
51
Figure 6.6 Simulation Results of Converter A with T Filter
Figure 6.7 Simulation Results of Converter B with Pi Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
52
Figure 6.8 Simulation Results of Converter B with L Filter
Figure 6.9 Simulation Results of Converter B with T Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
53
Figure 6.10 Simulation Results of Converter C with Pi Filter
Figure 6.11 Simulation Results of Converter C with L Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
54
Figure 6.12 Simulation Results of Converter C with T Filter
Figure 6.13 Simulation Results of Converter D with Pi Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
55
Figure 6.14 Simulation Results of Converter D with L Filter
Figure 6.15 Simulation Results of Converter D with T Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
56
Figure 6.16 Simulation Results of Converter E with Pi Filter
Figure 6.17 Simulation Results of Converter E with L Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
57
Figure 6.18 Simulation Results of Converter E with T Filter
Figure 6.19 Simulation Results of Converter F with Pi Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
58
Figure 6.20 Simulation Results of Converter F with L Filter
Figure 6.21 Simulation Results of Converter F with T Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
59
Figure 6.22 Simulation Results of Converter G with Pi Filter
Figure 2.23 Simulation Results of Converter G with L Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
60
Figure 6.24 Simulation Results of Converter G with T Filter
Figure 6.25 Simulation Results of Converter H with Pi Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
61
Figure 6.26 Simulation Results of Converter H with L Filter
Figure 6.27 Simulation Results of Converter H with T Filter
When comparing all three filter applications for 200kHz and 80% duty cycle
simulation, it is determined that the Pi and L filter will yield a passing EMI level while
the T filter will not pass CISPR22s standards. When the duty cycle was increased to
92%, all three filter designs passed standards with the best result being when the Pi
filter was used. For an 800kHz switching frequency and 80% duty cycle, all three
filters passed standards but a higher margarine then the 200kHz switching frequency

Texas Tech University, Madelyn Bailey Ulferts, December 2015
62
application. The Best result for the 800kHz and 80% duty cycle was when the Pi filter
was used. As the duty cycle of the 800kHz simulation increased to 92%, the EMI
levels further decreased and the Pi filter had the best results. The switching frequency
was then further increased to 1.4MHz with an 80% duty cycle. This simulation
resulted only the Pi and L filters to pass the standards for all frequency ranges. The Pi
filter started showing a spike around the 200kHz frequency but was below standards
requirement. The T filter pass standards for 600kHz and above, but failed standards
around the 200kHz frequency. The duty cycle was then increased to 92% which
resulted in the passing of all filters by standards requirements. The strongest result was
with the Pi filter. For 2MHz switching frequency, all duty cycles and filters passed
CISPR22 standards. The best results was when the duty cycle was at 92%. This
concluded in a lower amount of spikes along the frequency range. The magnified
switching frequency results for the simulations above are found in Appendix B. Table
6.4 shows the resulting EMI range for all switching frequencies, duty cycles, and filter
applications simulated in this chapter.
Table 6.4 Resulting EMI Range for Filter Application
200kHz Switching Frequency
Duty Cycle 80% 92%
EMI Range (dB)
Pi Filter -89…-92 -99.2…-102.4
L Filter -51…-53 -61.5…-63.5
T Filter -11…-14 -61.8…-65
800kHz Switching Frequency
Duty Cycle 80% 92%
EMI Range (dB)
Pi Filter -109.6…-111.2 -122…-130
L Filter -70.5…-72 -89.6…-90.7
T Filter -70.4…-71.5 -88…-93.5
1.4MHz Switching Frequency
Duty Cycle 80% 92%
EMI Range (dB)
Pi Filter -109…-110 -111…-114
L Filter -69.7…-71 -71.3…-72.7
T Filter -69…-70.5 -71…-76.7
2MHz Switching Frequency

Texas Tech University, Madelyn Bailey Ulferts, December 2015
63
Duty Cycle 80% 92%
EMI Range (dB)
Pi Filter -110…-112 -135.7…-138
L Filter -70.5…-72 -113.5…-117
T Filter -70.9…-72.5 -100…-112.5

Texas Tech University, Madelyn Bailey Ulferts, December 2015
64
CHAPTER VII
RESULTS
The research conducted in this thesis started with analysis of a proposed
method for designing DC/DC boost converters with components values influenced by
multiple variables. This analysis was conducted in Chapter IV and concluded with a
stronger understanding of how design and output variables can affect the selection of a
converters components values and how it will affect the EMI resulting from the
converter. It was observed that when increasing the duty cycle of a converter, the EMI
in the system will decrease, and increasing the switching frequency will further
decrease the EMI in the system up to a certain point. This test was the first time that
this patter appear and it remained a reoccurring pattern for all tests conducted in this
research.
The first design method from Chapter IV, focused on allowing load resistance,
duty cycle, and switching frequency to effect the component values. The second
design method found in Chapter V, used maximum and minimum values for duty
cycles and load resistance to determine component values and then used a common
variable to relate all switching frequencies to one another and calculated component
values. The goal of this was to decrease the amount of variables that affect the
component value in the system to only the variables defined by the user at initial
design. As a result, a constant set of component values were recommended for all 8
converters under test. This yielded a positive effect on all tested converters from the
previous study.
Chapter V showed an improved method for designing DC/DC boost
converters. This method was then further improved in Chapter VI when filters were
applied. Three filter types were analyzed for each converter. These filter types were
the Pi, L, and T filter. The effect that each filter made on the 8 converter types varied
from converter to converter. This resulted in the ability to determine the assignment of
filter types to converter types. The analysis and assignment of components and filters
for each converter type is conducted below.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
65
7.1 Comparison of converter A and B test results
To recall, the converter A had a switching frequency of 200kHz and a duty
cycle of 80% while the converter B had the same switching frequency but operated
with a 92% duty cycle. For all three test methods conducted, this pair constantly had
the highest resulting level of EMI out of all other converter pairs. The converter A
continually had a higher EMI level than the second, making this converter the least
desired converter for applications requiring EMC CISPR22 standards to be meet. The
required maximum EMI level for this switching frequency to meet CISPR22 standards
is -40 dB.
7.1.1 Converter A
When the method for converter design in Chapter IV was applied to converter
1, the EMI level was in the range of 9.2 dB - 9.86 dB. This range improved when the
modified method from Chapter V was applied. The resulting range decreased to 4.4
dB - 3.35 dB. With a required maximum allowable EMI level of -40, converter A from
the Chapter V test method was 44.4 dB - 43.35dB above the standard line. Chapter VI
then applied a Pi filter to the modified converter A. This resulted in an EMI range of -
92 dB to -89 dB. The Pi filter was then removed and an L filter was applied to the
converter. As a result, the EMI range values were increased to -53 dB to -51 dB. This
was still a passing result yet had a lower desired EMI level then with the Pi filter. The
final filter applied to converter A was the T filter. This further increased the values for
the EMI range to a level that would not pass CISPR22 standards. This resulting EMI
range was -11 dB to -14dB. It is noticed that all filters when applied to converter A
resulted in a 3 dB range interval. The strongest application for converter A is when
method two is used for component selection and a Pi input filter designed in Chapter
VI is used.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
66
7.1.2Converter B
For Chapter IV analysis of converter 2, the EMI range was shown to be -2.6
dB to 2.01 dB. This range is an improvement from the initial range resulting from
converter 1. When the modified method from Chapter V was applied to converter 1,
the EMI range resulted in -5.25 dB to -4.4 dB. The interval for this range was slightly
increased then the previous converter 2 range. In order to comply with EMC
standards, the EMI level must decrease by at least 35.6 dB. This requirement was meet
by use of any of the three tested input filters. When use of a Pi filter applied to the
modified converter 1, the EMI level decreases to a range of -99.2 to -102.4. This range
is well within the CISPR22 requirements. The L and T filter resulted in EMI ranges of
-61.5 dB to -63.5 dB and -61.8 dB to -65 dB respectively. This is a slightly unexpected
result when comparing to the results of the L and T filter with converter 1. The change
between the L and T filter range in converter 1 was much larger than what is observed
when the L and T filter are applied to converter 2. For applications with converter 2,
there is not a strong case for picking the L filter as opposed to the T filter because their
resulting range values are within 3 dB of one another. The Pi filter far surpassed the
results of the L and T filter for converter 2. Making the Pi filter the most
recommended filter for the modified converter 2 design, yet the L and T filters are
appropriate substitutes for the Pi filter.
7.2 Comparison of converter C and D test results
Converters C and D both operate with a switching frequency of 800kHz.
Converter C uses a duty cycle of 80% and converter D uses a duty cycle of 92%. Both
of these converter had lower EMI results when comparing to its equivalent duty cycle
converter A or B. The CISPR22 maximum allowable EMI level for 800kHz is -65 dB.
Both converter C and D were able to meet this requirement.
7.2.1 Converter C
Converter C did not pass the EMC requirements until an input filter was
applied to the converter. For initial testing in Chapter IV, converter C had and EMI

Texas Tech University, Madelyn Bailey Ulferts, December 2015
67
range of 8.64 dB to 9.63 dB. When the modified approach for determining component
values was used, the EMI level ranged from -1.8 dB to -2.85 dB. This required the
input filter to attenuate the EMI level down by at least 63.2 dB. When the Pi input
filter was used on the modified converter, the EMI level meet the requirement and
resulted in a maximum EMI level of -109.6 dB. For L filter application, the EMI
level was in the range of -70.5 dB to -72 dB. Lastly, when the T filter was inputted on
the converter, the EMI level was in the range of
-70.4 dB to -71.5 dB.
7.2.2 Converter D
For application with converter D, the design must feature one of the input
filters with the modified converter in order to pass CISRP22 standards. For initial
testing, the maximum level of EMI appearing is the system was 1.91 dB. After
modified testing, the EMI level decreased to a maximum value of -11 dB. When the
Pi, T and L input filters were applied to converter D, the maximum EMI levels were -
122 dB, -89.6 dB, and -88 dB respectively.
7.3 Comparison of converter E and F test results
Converters E and F were the converters assigned to operate with a 1.4MHz
switching frequency. Converter E operated with an 80% duty cycle and converter F
operated with a 92% duty cycle. The maximum allowable EMI level for these two
converter at 1.4MHz was -65 dB.
7.3.1 Converter E
Converter E had a maximum 9.6 dB EMI level when operating in the initial
test method of Chapter IV and had a resistive load of 250 Ω. When designed with the
modified method of Chapter V, the resulting EMI level was in the range of -8.3 dB to -
9.8 dB. When using a Pi input filter, the EMI ranged from -109 dB to -110 dB. The
EMI range increased when use of a L or T filter was applied. The ranges for the L and
T filter were close with the L filter having a range of -69.7 dB to -71 dB and the T
filter having a range of -69 dB to

Texas Tech University, Madelyn Bailey Ulferts, December 2015
68
-70.5 dB. All tested filters are appropriate for applications requiring converter E.
7.3.2 Converter F
The average EMI level of converter F test conducted in Chapter IV was -1.37
dB. This was a strong EMI level when compared to the other converters in this initial
testing. After reanalyzing converter F with the modified method from Chapter V, the
EMI level ranged from -17 dB to -23 dB. This EMI range is so far the lowest out of all
other compared converters for this stage of design. Using the Pi filter with the
modified converter F, the EMI level was in the range of -122 dB to -130 dB. This
range is the lowest determined for all tested converters and all tested filters with each
converter. When the L and T filter are placed at the input of converter F, the resulting
maximum EMI level was
-89.6 dB for the L filter and -88 dB for the T filter.
7.4 Comparison of converter G and H test results
Converter G and H operated at the highest switching frequency tested in this
thesis of 2MHz. Converter G operated with a 80% duty cycle and converter H
operated with a 92% duty cycle. The maximum allowable EMI level at 2MHz is -65
dB.
7.4.1 Converter G
Initial analysis of converter G resulted in a maximum EMI level of 9.2 dB and
a minimum level of 8.48 dB. When the modified converter was used, the EMI level
ranged from -9.5 dB to -10.6 dB. With application of the Pi, L, and T filter, the
maximum EMI levels resulted in -110 dB, -70.2 dB, and -70.9 dB respectively. With
the use of the Pi filter, a spike around 200kHz appeared with an EMI level of -70 dB.
The spike was low enough to not be an issue for use of this converter with the Pi filter
but this effect should be taken into consideration for applications requiring converter
G with a Pi filter.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
69
7.4.2 Converter H
Chapter IV analysis of converter H resulted in an EMI range from -5.16 dB to
1.26 dB. After the modified design was applied, the EMI level decreased to a range of
-20 dB to -23.1 dB. When filters were applied to the modified converter G, the EMI
results of frequencies outside the switching frequency had a different result than any
other converter with filter applications. Figure 6.26 shows the simulation result for
converter G across all frequencies. The spikes at all locations are attenuated at a much
higher level than seen in any other Pi filter test. The maximum EMI level at the 2MHz
switching frequency was
-111 dB and the minimum level was -114 dB. The L filter resulted in a maximum EMI
level of -71.3 dB and a minimum level of -72.7 dB. This result is shown in Figures
6.27 and C.23. For T filter application, the EMI level ranged from -100 dB to -112.5
dB. When looking at the results of this filter in Figure 6.28, it is noticed that there is a
dipping spike accruing around 300kHz.
7.5 Conclusion
The initial method for designing SMPS is introduced in Chapter IV. In this
initial approach, all initial variables of switching frequency, duty cycle, and load
resistance were taken into account when selecting the components for each SMPS
under test. The result of this initial step was an insight on how the variables of the
system effect the recommended component values. This also showed how selecting
components based on a single duty cycle will result with higher duty cycles having
components with higher EMI suppression. This same pattern occurred when
increasing the switching frequency. The modified method allowed only the converters
initial operating values summed up in Table 3.3 to determine component values. This
proved to be beneficial for all converters under test. The EMI was now at a level that
is in a range to allow suppression to EMC standards to be accomplished with a single
input filter. This theory was proven in Chapter VI where the Pi, T, and L filters were
calculated and applied to each converter. All results except converter A with a T filter
passed standards set by CISRP22.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
70
In conclusion, the results of the testing conducted on the SMPS showed
improvement in EMI results with each modification of the initial method. By focusing
on the initial design conditions of various SMPS, a converter can be designed that will
meet CISRP22 standards for multiple operating variables.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
71
BIBLIOGRAPHY
Rouse, Margraret. "What Is Electromagnetic Interference (EMI)? - Definition from
WhatIs.com." SearchMobileComputing. TechTarget, Mar. 2010. Web. 1 Feb.
2015.
<http://searchmobilecomputing.techtarget.com/definition/electromagnetic-
interference>
Perez, Reinaldo. Handbook of Electromagnetic Compatibility. San Diego: Academic,
1995. 501. Print
Christophe Basso: Switch-Mode Power Supplies SPICE Simulations and Practical
Designs“, McGraw-Hill, 2008
Tarateeraseth, Vuttipon, Kye Yak See, Flavio G. Canavero, and Richard Weng-Yew
Chang. "Systematic Electromagnetic Interference Filter Design Based on
Information From In-Circuit Impedance Measurements." IEEE Transactions on
Electromagnetic Compatibility IEEE Trans. Electromagn. Compat. 52.3
(2010): 588-98. Web.
Tihanyi, Laszlo. “Electromagnetic compatibility in power electronics”, IEEE Press ;
Sarasota, Fla., U.S.A, 1995
Nussbaumer, T., M.l. Heldwein, and J.w. Kolar. "Differential Mode Input Filter
Design for a Three-Phase Buck-Type PWM Rectifier Based on Modeling of
the EMC Test Receiver." IEEE Trans. Ind. Electron. IEEE Transactions on
Industrial Electronics 53.5 (2006): 1649-661. Web.
Krause, B. "Practical Feedback [switched Mode Power Supplies]." Power Engineer
Power Eng. 19.1 (2005): 42. Web.
Zhang, Dongbing, D.y. Chen, M.j. Nave, and D. Sable. "Measurement of Noise
Source Impedance of Off-line Converters." APEC '98 Thirteenth Annual
Applied Power Electronics Conference and Exposition (1998): n. pag. Web.
Hunter, R.d. "Regulatory and Technological Trends in Power Supplies." 1993
International Symposium on Electromagnetic Compatibility (1993): n. pag.
Web.
Beltrame, Fernando, Leandro Roggia, and Jose Renes Pinheiro. "Comparative
Analysis of Electromagnetic Interference Produced by High Power Single-
phase Power Factor Correction Pre-regulators." 2009 Brazilian Power
Electronics Conference (2009): n. pag. Web.

Texas Tech University, Madelyn Bailey Ulferts, December 2015
72
Lu, Bing, Wei Dong, Shuo Wang, and F.c. Lee. "High Frequency Investigation of
Single-switch CCM Power Factor Correction Converter." Nineteenth Annual
IEEE Applied Power Electronics Conference and Exposition, 2004. APEC '04.
(2004): n. pag. Web.
Redl, Richard, and Istvan Novak. "Instabilities in Current-mode Controlled Switching
Voltage Regulators." 1981 IEEE Power Electronics Specialists Conference
(1981): n. pag. Web.
Pagano, D. J., and E. Ponce. "On the Robustness of the DC-DC Boost Converter under
Washout SMC." 2009 Brazilian Power Electronics Conference (2009): n. pag.
Web.
Petrosyants, K.o., and I.a. Kharitonov. "Account for Radiation Effects in Signal
Integrity Analysis of PCB Digital Systems." 2013 Euromicro Conference on
Digital System Design (2013): n. pag. Web.
"High Input Voltage Step-Down DC-DC Converters." Kursun/Multi-Voltage CMOS
Circuit Design Multi-Voltage CMOS Circuit Design (2006): 127-38. Web.
Borges, Altamir Ronsani, and Ivo Barbi. "Three-phase Single Stage AC-DC Buck-
Boost Converter Operating in Buck and Boost Modes." XI Brazilian Power
Electronics Conference (2011): n. pag. Web.
Qiao, C., and J. Zhang. "Control of Boost Type Converter at Discontinuous
Conduction Mode by Controlling the Product of Inductor Voltage-Second."
IEEE 36th Conference on Power Electronics Specialists, 2005. (2005): n. pag.
Web.
Muller, Nicolas, Samir Kouro, Jaime Glaria, and Mariusz Malinowski. "Medium-
voltage Power Converter Interface for Wave Dragon Wave Energy Conversion
System." 2013 IEEE Energy Conversion Congress and Exposition (2013): n.
pag. Web.
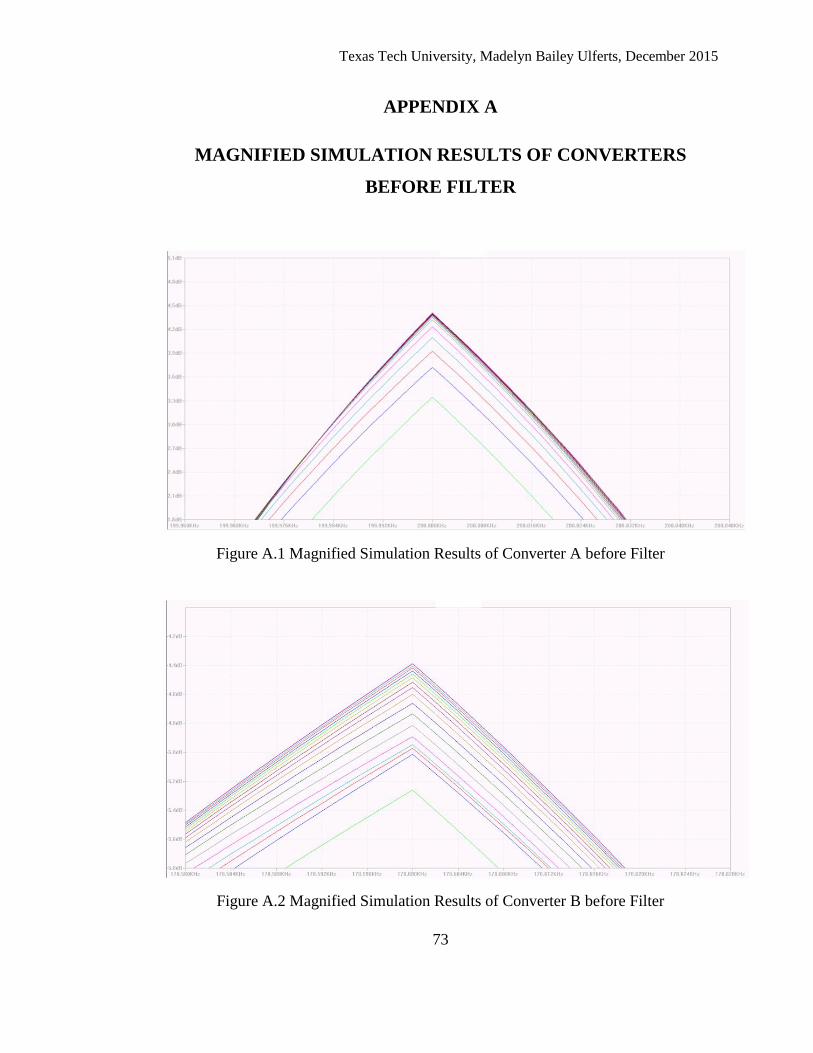
Texas Tech University, Madelyn Bailey Ulferts, December 2015
73
APPENDIX A
MAGNIFIED SIMULATION RESULTS OF CONVERTERS
BEFORE FILTER
Figure A.1 Magnified Simulation Results of Converter A before Filter
Figure A.2 Magnified Simulation Results of Converter B before Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
74
Figure A.3 Magnified Simulation Results of Converter C before Filter
Figure A.4 Magnified Simulation Results of Converter D before Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
75
Figure A.5 Magnified Simulation Results of Converter E before Filter
Figure A.6 Magnified Simulation Results of Converter F before Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
76
Figure A.7 Magnified Simulation Results of Converter G before Filter
Figure A.8 Magnified Simulation Results of Converter H before Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
77
APPENDIX B
MAGNIFIED SIMULATION RESULTS OF CONVERTERS WITH
FILTERS
Figure B.1 Magnified Simulation Results of Converter A with Pi Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
78
Figure B.2 Magnified Simulation Results of Converter A with L Filter
Figure B.3 Magnified Simulation Results of Converter A with T Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
79
Figure B.4 Magnified Simulation Results of Converter B with Pi Filter
Figure B.5 Magnified Simulation Results of Converter B with L Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
80
Figure B.6 Magnified Simulation Results of Converter B with T Filter
Figure B.7 Magnified Simulation Results of Converter C with Pi Filter
Texas Tech University, Madelyn Bailey Ulferts, December 2015
81
Figure B.8 Magnified Simulation Results of Converter C with L Filter
Figure B.9 Magnified Simulation Results of Converter C with T Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
82
Figure B.10 Magnified Simulation Results of Converter D with Pi Filter
Figure B.11 Magnified Simulation Results of Converter D with L Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
83
Figure B.12 Magnified Simulation Results of Converter D with T Filter
Figure B.13 Magnified Simulation Results of Converter E with Pi Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
84
Figure B.14 Magnified Simulation Results of Converter E with L Filter
Figure B.15 Magnified Simulation Results of Converter E with T Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
85
Figure B.16 Magnified Simulation Results of Converter F with Pi Filter
Figure B.17 Magnified Simulation Results of Converter F with L Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
86
Figure B.18 Magnified Simulation Results of Converter F with T Filter
Figure B.19 Magnified Simulation Results of Converter G with Pi Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
87
Figure B.20 Magnified Simulation Results of Converter G with L Filter
Figure B.21 Magnified Simulation Results of Converter G with T Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
88
Figure B.22 Magnified Simulation Results of Converter H with Pi Filter
Figure B.23 Magnified Simulation Results of Converter H with L Filter

Texas Tech University, Madelyn Bailey Ulferts, December 2015
89
Figure B.24 Magnified Simulation Results of Converter H with T Filter





























