Embed Size (px)
Citation preview
Analiza metod SIS i koncepcja ich wykorzystania podczas podejścia do
lądowania według GNSS.
Krzysztof Banaszek
Chełm, 15.02.2005

2
Zakres prezentacji
• Wymagania ICAO dla systemów GNSS• Wymagania ICAO dla poszczególnych
kategorii podejścia do lądowania• Szczególne wymagania odnośnie
integralności/wiarygodności• Systemy wspomagające GNSS• Projekty SBAS na świecie• Sprawdzenie SIS dla SBAS i GBAS

3
ICAO – wymagania na system
• Państwa – Sygnatariusze Konwencji ICAO (Międzynarodowej Organizacji Lotnictwa Cywilnego) zobowiązane są zgodnie z Art. 37 i 38 stosować SARPs (Standardy i Zalecane Praktyki) lub powiadomić o odstępstwach w zakresie SARPs.
• W chwili obecnej w SARPs (Załącznik 10 Tom 1 do Konwencji ICAO) zdefiniowano wymagania dla systemów GLONASS i GPS wykorzystujących częstotliwość L1. Sygnał GPS L1 z z kodem C/A – Coarse Acquisition.
• Ponadto ICAO zdefiniowała wymagania dla systemów ABAS (aircraft-based augmentation system) i SBAS (satellite-based augmentation system) oraz GBAS (ground-based augmentation system).
• Przyszłe wymagania jakie definiowane będą dla zastosowań w lotnictwie cywilnym planuje się na podstawie spodziewanego rozwoju infrastruktury:
• b) GPS/L5: Wstępne możliwości operacyjne - 2012, Pełna funkcjonalność - 2015;• d) GLONASS/L3: zgłoszona dostępność od 2008;• e) Galileo/L1: zgłoszona dostępność od 2008 ;• f) Galileo/E5a: zgłoszona dostępność od 2008;• g) Galileo/E5b: zgłoszona dostępność od 2008.
• Należy założyć, że w przypadku pojawienia się każdego nowego sygnału w przestrzeni niezbędny jest okres od jednego do dwóch lat na ocenę i certyfikację sygnału do zastosowań w lotnictwie cywilnym w ramach zastosowań specjalnych (tzw. safety-of-life applications).

4
ICAO – zastosowania
• W zakresie faz lotu rozróżnia się: lot po trasie, lot w terminalu, podejścia początkowego, podejście do lądowania oraz odlot po starcie.
• Przez kilka ostatnich dziesięcioleci funkcjonowały zdefiniowane przez ICAO podejścia nieprecyzyjne-NPA oraz podejścia precyzyjne-PA w kategoriach (CAT) I, II, III (a,b,c).
• Podejścia nieprecyzyjne bazują na wykorzystaniu pomocy nawigacyjnych typu NDB, VOR i DME. Podejścia precyzyjne bazują na wykorzystaniu systemów ILS, a ostatnio na części lotnisk instalowane są systemy MLS.
• W związku z pojawieniem się możliwości wykorzystania systemów GNSS (GPS, GLONASS, SBAS, GBAS) w Zał. 6 ICAO zdefiniowano dwa dodatkowe typy podejść z prowadzeniem pionowym APV (podejścia o wymaganiach „między” NPS i PA):
• a) Baro-VNAV - podejścia wykorzystujące prowadzenie pionowe z wysokościomierza barometrycznego wchodzącego w skład FMS (flight management system) samolotu (rozwiązania wymaga zastosowania odpowiedniego komputera pokładowego)
• b) APV I, APV II - podejścia wykorzystujące prowadzenie pionowe z systemu SBAS GNSS.W obu przypadkach pozycja w płaszczyźnie poziomej wyznaczana jest przez odb. GNSS.
• Ponadto zdefiniowano podeście precyzyjne CAT I GBAS z wykorzystaniem systemu GNSS z naziemnym systemem wspomagającym – trwają prace nad certyfikacją tego typu systemów (np. LAAS w USA).
• W latach 90-tych XX wieku całość wymagań nawigacyjnych oparto o koncepcję RNP (Required Navigation Performance) definiowanych dla różnych faz lotu, która „uniezależnia” nawigację od fizycznej lokalizacji urządzeń/systemów.

5
ICAO – obowiązki państwa
• Zgodnie z zapisami Załącznika 10 Tom 1 do Konwencji ICAO:
• Każde Państwo jest odpowiedzialne za definiowanie obszaru usługi i zatwierdzanie operacji opartych na GNSS wewnątrz tej przestrzeni i ponosi odpowiedzialność za to, aby SBAS spełniał wymagania Zał. 10 wewnątrz własnej przestrzeni powietrznej, a także, aby zapewniane było odpowiednie zgłaszanie operacyjne stanu systemu nawigacyjnego (depesze NOTAM dla danej przestrzeni).
• Przed zatwierdzeniem operacji SBAS, Państwo musi ustalić, czy proponowane operacje są w dostatecznym stopniu wspierane przez jeden, lub więcej SBAS-ów. To wyznaczenie powinno skupić się na praktycznych i używanych sygnałach SBAS, pod względem odniesionego położenia naziemnej sieci SBAS.
• Zgodnie z zapisami Załącznika 10 Rozdział 2:
• Pokładowe systemy ABAS powinny stosować w odbiornikach funkcje/algorytmy RAIM (Receiver autonomous integrity monitoring) zgodnie z wymaganiami międzynarodowymi i w oparciu o certyfikację typu wydaną przez Państwo operatora statku powietrznego.
• W przypadku nawigacji trasowej pilot zobowiązany jest przeanalizować dostępność SIS (pokrycie satelitami) na trasie lotu w planowanym czasie lotu. Funkcje te należy wspomagać systemami skojarzonymi z systemem planowania lotów (np. w służbach AIS na lotniskach).

6
ICAO - GNSS
GNSS
GPS
GLONASS
Satellite Based Augmentation System
(SBAS)
Aircraft Based Augmentation System
(ABAS)Ground Based
Augmentation System(GBAS)
RAIMReceiver AutonomousIntegrity Monitoring
Autonomiczne monitorowanie integralności odbiornika
AAIMAircraft AutonomousIntegrity Monitoring
Autonomiczne monitorowanie integralności statku powietrznego
GALILEO(TBD)

7
droga startowa
Dokładność
Limit alarmu
PoziomaPionowaPoziomaPionowa
CAT I APV II APV II NPA16 m
4 à 6 m 8 m 40 m
10 à 15 m 20 m
16 m 220 m20 m ---
--- 40 m
50 m
DH/MDH (min.)
Wid. Poz. (mini.)
Strefy ochronne
Ścieżka
200 ft 250 ft 250 ft
550 m 550 m T.B.D 1200 m
zreduk. (ILS)
bliska ILS
Minima zależą od przeszkód
5.2% (3°) zniżanie + stabilizacja
Kategorie podejść
Pionowa
5.2%(3°) 5.2% (3°)
200 ft
1000 m 1000 m T.B.D 1800 m
Z światłami ląd.
Bez świateł ląd.
Wiarygodność / ciągłość SIS tak tak tak nie
Ścieżka 5.2% (3°) Płaszczyzna pozioma MDH ( 250 ft)
220 m16 m
20m
16 m8 m
MAPT250 ft
200 ft
bliska ILS

8
Tabela z wymaganiami ICAO

9
Definicje ICAO (Zał. 10)
Dokładność - błąd pozycji w GNSS jest różnicą pomiędzy oszacowaną pozycją a pozycją aktualną. Dla pozycji oszacowanej prawdopodobieństwo powinno wynosić przynajmniej 95 %, że błąd pozycji jest wewnątrz wymaganej dokładności. Stacjonarne naziemne systemy takie jak VOR i ILS mają względną wielokrotną charakterystykę błędu, więc pozwalają zmierzyć funkcjonalność w krótkim okresie czasu (np. podczas lotniczej inspekcji), przyjęto że dokładność systemu nie ulega zmianom po teście. Jakkolwiek błędy w systemie GNSS zmieniają się wraz z upływem czasu. Przemieszczające się satelity i charakterystyka błędów GNSS to rezultat powstawania błędów pozycyjnych, zmieniających się w nawet okresie godzin. W dodatku, dokładność (błąd ograniczony z prawdopodobieństwem 95 %) ulega zmianie w wyniku zróżnicowanej geometrii satelitarnej.
Wiarygodność i czas do alarmu - jest miarą zaufania w poprawność informacji dostarczanych przez system. Wiarygodność obejmuje zdolność systemu do dostarczania użytkownikowi na czas odpowiednich ostrzeżeń (alarmów), kiedy system nie powinien być używany w danej operacji (lub fazie lotu). W celu określenia, czy dany błąd położenia jest akceptowalny, ustalana jest granica alarmu, która definiuje reprezentowany największy, dopuszczalny błąd pozycji dla bezpieczeństwa operacji. Błąd pozycji nie może przekroczyć alarmu granicznego bez zapowiedzenia. Typowe Wymagania wiarygodności nawigacyjnego systemu dla pojedynczego statku powietrznego do wspierania wszystkich faz lotu poza podejściem precyzyjnym ustalono jako 1 – 1 x 10-5 na godzinę. W przypadku systemu GNSS, biorąc pod uwagę fakt, że system obsługuje w danej chwili dużą liczbę statków powietrznych wymagania wiarygodności ustalono jako 1 – 1 x 10-7 na godzinę a dla podejść APV-I, II i CAT-I jako 1 – 1 x 10-7 na podejście. Czas do alarmu ustalono od 5min (dla trasy) do 6s dla podejścia precyzyjnego CAT-I.

10
Definicje ICAO (Zał. 10)
Ciągłość usługi - jest zdolnością systemu do wykonywania swoich funkcji bez nieplanowanych przerw podczas zamierzonej operacji. Dla lotu po trasie jest to zdolność systemu do dostarczenia wyjściowych danych nawigacyjnych z określoną dokładnością i wiarygodnością w czasie zamierzonej operacji (przy założeniu, że były one dostępne na początku operacji). Typowe wymagania ciągłości nawigacyjnego systemu dla pojedynczego statku powietrznego do wspierania wszystkich faz lotu ustalono jako 1 – 1 x 10-4 na godzinę. Jednakże dla systemów satelitarnych, biorąc pod uwagę fakt, że system obsługuje w danej chwili dużą liczbę statków powietrznych a parametry zależą od rodzaju przestrzeni powietrznej i „gęstości” ruchu lotniczego - wymagania ciągłości ustalono jako przedział od 1 – 1 x 10-4 do 1 – 1 x 10-8 na godzinę a dla podejść APV-I, II i CAT-I jako 1 – 1 x 10-6 w każdych 15 s.
Dostępność – dla GNSS jest scharakteryzowana przez przedział czasu, w którym system będzie używany dla nawigacji, podczas którego niezawodność nawigacyjnej informacji jest przedstawiana załodze, autopilotowi lub innym systemom zarządzającym lotem statku powietrznego. Zakłada się, że jeżeli usługa satelitarnej nawigacji ma zastąpić istniejącą trasową infrastrukturę pomocy nawigacyjnych, dostępność GNSS powinna być współmierna z dostępnością dostarczaną przez istniejącą infrastrukturę.Dostępność GNSS ustalono w przedziale od 0,99 do 0,99999. Stosowanie określonego poziomu dostępności zależy od potrzeb operacyjnych (częstość operacji, warunki pogodowe, dostępność alternatywnych pomocy nawigacyjnych, itp..). W przypadku zastosowania wartości 0,99 konieczne jest zachowanie tradycyjnych pomocy nawigacyjnych. W przypadku nawigacji trasowej osiągnięcie poziomu 0,99999 pozwoli na wycofanie tradycyjnych pomocy nawigacyjnych i traktowanie GNSS jako jedynego sytemu nawigacji.Wyznaczenie dostępności – ze względu na specyfikę systemu GNSS jest praktycznie niemożliwe przez pomiar, konieczne jest określenie dostępności w wyniku działań projektowych, oraz analizę i modelowanie parametrów MTBF, MTBO.

11
Wiarygodność / Integralność (ILS)• Integralność systemu ILS - Jakość odnosząca się do zaufania w prawidłowość informacji dostarczonych przez
urządzenie naziemne. Poziom integralności radiolatarni kierunku lub ścieżki schodzenia, wyraża się jako prawdopodobieństwo nie wypromieniowania błędnych sygnałów prowadzących.
• Przyjęto ogólnie, że bez względu na wymagania operacyjne, średni współczynnik występowania wypadków śmiertelnych podczas lądowania, wynikających z awarii lub mankamentów całego systemu obejmującego sprzęt naziemny, statek powietrzny i pilota, nie powinien przekraczać 1 x 10-7
-kryterium to określane jest często jako współczynnik całkowitego ryzyka .
Poziom
Radiolatarnia kierunku lub ścieżki schodzenia
Integralność Ciągłość usługi MTBO (godziny)
1 Nie wykazana lub mniejsza niż wymagana dla poziomu 2
2 1- 10-7 w każdym lądowaniu
1- 4 x 10-6
w każdym 15-sekundowym okresie1 000
3 1- 0.5 x 10-9
w każdym lądowaniu1- 2 x 10-6
w każdym 15-sekundowym okresie2 000
4 1- 0.5 x 10-9
w każdym lądowaniu1- 2 x 10-6
w każdym 30-sekundowym okresie (nadajnik kierunku)
15-sekundowym okresie (nadajnik ścieżki schodzenia)
4 000 (nadajnik kierunku)2 000 (nadajnik ścieżki schodzenia)
Uwaga. – Jeśli, w przypadku systemów już zainstalowanych, niedostępna jest wartość integralność poziomu 2, bądź też niemożliwejest jej obliczenie, niezbędne jest dokonanie przynajmniej szczegółowej analizy integralności w celu zagwarantowania poprawnej i bezawaryjnej pracy monitora.

12
Wiarygodność w systemach GNSS
Alert Limit Box:Rozmiar określony
dla danego typu operacji
Protection Level Box:Rozmiar zależy od dokładnościGNSS, geometrii satelitów, itp..
HPL(Horizontal Protection Level) – poziomy poziom ochronny VPL(Vertical Protection Level) – pionowy poziom ochronny HAL(Horizontal Alert Limit) – wartość graniczna alarmu poziomegoVAL(Vertical Alert Limit) – wartość graniczna alarmu pionowego
VPL
HPL
HAL
VALV P L

13
Różne wartości alarmu (ALB) dla poszczególnych typów operacji
556 m40 m
50 m20 m
10 m
50 m
NPA i APV Baro-VNAV(brak VAL w przepisach ICAO)
APV IAPV II Cat I
x
Uwaga: rysunek nie w skali
14
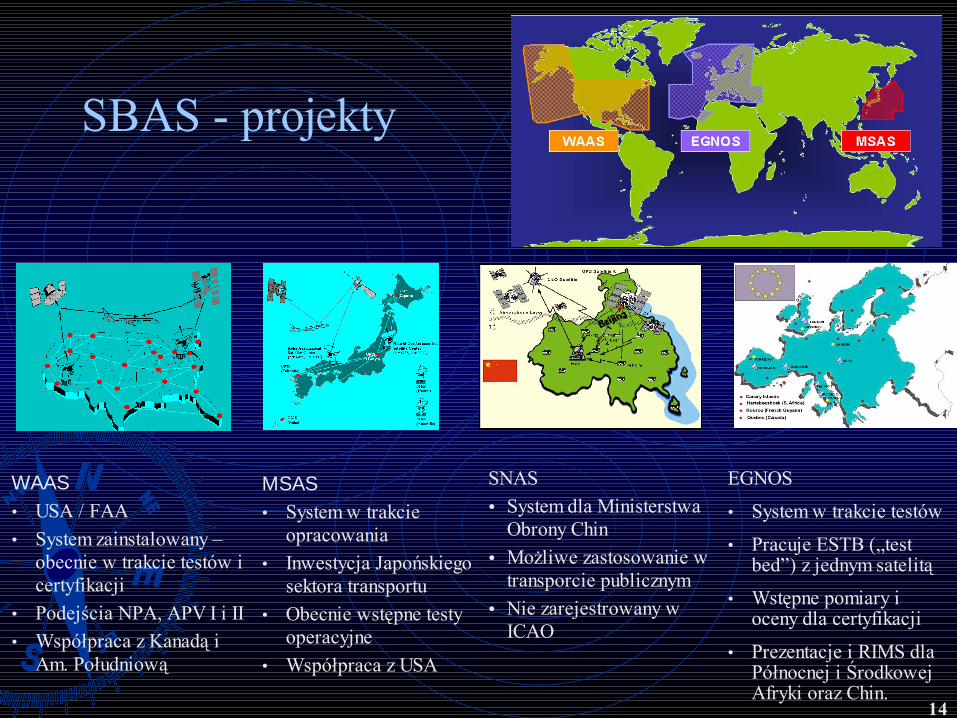
SBAS - projekty
MSAS• System w trakcie
opracowania• Inwestycja Japońskiego
sektora transportu• Obecnie wstępne testy
operacyjne• Współpraca z USA
EGNOS
• System w trakcie testów
• Pracuje ESTB („test bed”) z jednym satelitą
• Wstępne pomiary i oceny dla certyfikacji
• Prezentacje i RIMS dla Północnej i Środkowej Afryki oraz Chin.
SNAS• System dla Ministerstwa
Obrony Chin• Możliwe zastosowanie w
transporcie publicznym• Nie zarejestrowany w
ICAO
WAAS• USA / FAA• System zainstalowany –
obecnie w trakcie testów i certyfikacji
• Podejścia NPA, APV I i II• Współpraca z Kanadą i
Am. Południową

15
EGNOS

16
MSAS – Japonia• Wykonano: koncepcję i opracowanie systemu oraz analizy odnośnie certyfikacji systemu.• MTSAT-1R – planowane wyniesienie satelity –2004.• MTSAT-2 – planowane wyniesienie 2005• Operacyjne uruchomienie satelity MTSAT-1R – od 2005 • Wspólna praca MTSAT-1R i MTSAT-2 poczynając od 2006 • Niezawodne usługi SBAS dzięki redundantnej konfiguracji.

17
Awionika GNSS• ABAS wykorzystuje techniki poprawy charakterystyk RAIM lub AAIM albo integruje GNSS
z innymi sensorami.• Podstawowy odbiornik GNSS musi spełniać wymagania Zał. 10 T 1 oraz specyfikacje
RTCA DO-208 lub EUROCAE ED-72A jak podano w wymaganiach FAA TSO-C129A lub JAA TSO C129 (uwaga: w przyszłości w Europie będą TGL a nie TSO).
• Do lotów po trasie, nawigacji terminalowej oraz NPA dopuszczone są więc systemy opisane wyżej, korzystające z GPS i/lub GLONASS na warunkach zgodnych w wymaganiami operacyjnymi tzn.:
• wcześniejsze potwierdzenie dostępności GNSS na czas lotu (NOTAM, RAIM),• wspomaganie przez system inercyjny lub inne sensory kiedy RAIM jest niedostępna ale
informacja pozycji GPS jest ważna,• Dla podejść APV I i II oraz CAT-I wymagane jest wyposażenie zgodnie z
wymaganiami ICAO oraz technicznymi i operacyjnymi dla SBAS i GBAS.
Odpowiednikami TSO-C145/146 będą TGL XY/XZ
18
Ocena SIS EGNOS/ESTB - założenia
• Zagadnienie: Czy SIS GNSS może spełnić wymagania RNP w zakresie Dokładności, Wiarygodności, Dostępności i Ciągłości usługi i zostać zatwierdzony i certyfikowany jako bezpieczny system nawigacji w lotnictwie cywilnym dla procedur podejścia do lądowania APV I, II, CAT-I?
• Prowadzone w ciągu ostatnich 2-3 lat testy w locie (również podejścia nieprecyzyjne), z wykorzystaniem systemów GNSS z jednej strony potwierdzają dokładność nawigacyjną GPS a z drugiej wskazują, że system nie zachowuje się tak jak wynika z przeprowadzonych symulacji i nie spełnia wymaganych parametrów RNP.
• Zbierane dane i wyniki testów prowadzonych w Polsce będą porównywane z wynikami uzyskanymi w sieci EUROCONTROL, korzystającej z takich samych odbiorników, oprogramowania do analizy i stosującej te same metody oceny SIS.
• Testy statyczne oraz testy w locie powinny być prowadzone odbiornikiem pozwalającym na analizę danych zgodnie z RTCA MOPS DO-229C.
• W ramach sprawdzenia należy wykonać testy porównawcze i ocenę wpływu różnych odbiorników oraz systemów antenowych na zbierane dane.

19
Założenia do analizy SIS
Wiarygodność
Dokładność
Ciągłość
Dostępność
•ależności pomiędzy poszczególnymi charakterystykami systemu GNSS można przedstawić w postaci „piramidy”.
•okładność nawigacji określana jest niezależnie od wiarygodności, ciągłości i dostępności.
•iarygodność oznacza zawsze wiarygodność dokładności nawigacji.
•iągłość oznacza zarówno ciągłość dokładności jak i ciągłość wiarygodności.
•ostępność oznacza równoczesną dostępność zarówno dokładności jak i wiarygodności. Czasami uwzględnia się również dostępność ciągłości.
20
EGNOS – SIS w przestrzeni nad Polską
• Stacja RIMS (2 kanały) w CBK Warszawa.• Stan wdrożenia:
• ESTB• EGNOS: faza SIS-1 i faza SIS-2,
• ORR (gotowość do testów operacyjnych) –przewidywana w roku 2005• Pokrycie terenu Polski satelitami GEO:
• AOR-E (PRN 120) - w trakcie testów SIS-2• IOR (PRN 131) - ESTB• Artemis (PRN 124) - w trakcie testów SIS-2• IOR-W (PRN 126) - w trakcie testów SIS-1 następnie SIS-2
• Zakłada się, że Sygnał w SIS-1 będzie mniej stabilny niż w ESTB z powodu prac inżynierskich i uruchamiania poszczególnych funkcji systemu.
• W trakcie fazy SIS-2 mogą występować przerwy w pracy systemu.• W fazie ORR system zapewniał będzie parametry przewidywane dla EGNOS.

21
Metody zbierania i przetwarzanie danych SIS w fazie podejścia do lądowania
• Określenie wymagań na instalację anteny, obornika i systemu przetwarzania.• Określenie wymagań ustawienia odbiornika (dla kilku typów).• Określenie metod zbierania i wstępnego przetwarzania danych, zgodnych z
DO 229C.• Określenie ustawień odbiornika, w szczególności:
• trybu pozycjonowania,• ustawienie filtru wyrównującego,• ustawienie kąta maski,• maksymalnej przerwy w pozyskiwaniu danych,• ustawień wynikających z testowania SIS dla trybu testowego EGNOS.
• Określenie częstotliwości oraz przedziałów dla zbierania i oceny danych.• Określenie zakresu odbieranych i analizowanych depesz EGNOS.• Określenie pozyskiwania danych efemeryd oraz almanachu.

22
Metody oceny i analizy danych
• Określenie zasad postępowania w przypadku przerw w pozyskiwaniu danych spowodowanych (np. wpływem odbiornika) lub pozyskania danych niepełnych (np. dla danej epoki).
• Określenie metod wyznaczenia dokładności z uwzględnieniem:• wielkości próbki danych,• 95 % rozkładu błędu,• skalowania dokładności dla najgorszej geometrii i liczby satelitów.
• Określenie metod wyznaczenia dostępności z uwzględnieniem:• wielkości próbki danych,• wymagań dla różnych procedur podejścia,
• Określenie metod wyznaczenia ciągłości z uwzględnieniem:• częstotliwości próbkowania i wielkości próbki danych,• liczby nieciągłości która powoduje konieczność szczegółowej analizy
• Określenie metod wyznaczenia wiarygodności z uwzględnieniem:• wartości limitów alarmu poziomego i pionowego,• maksymalnych czasów do alarmu dla poszczególnych faz lotu,
• Podział na parametry i metody postępowania dla:• testów statycznych w określonej lokalizacji,• wyznaczenia charakterystyk SIS dla innych lokalizacji,• testów w locie.

23
Metody oceny i analizy danych
• Dobranie sposobów wizualizacji wyników zapewniających w szczególności:• stan satelitów w czasie oraz poziom sygnał/szum,• charakterystyki określania pozycji poziomej,• charakterystyki określania pozycji pionowej,• rozkład błędów (dla błędów pozycji poziomej i pionowej).
• Zdefiniowanie metod postępowania w przypadku wystąpienia anomalii z uwzględnieniem:• wpływu lokalizacji (wielościeżkowość, interferencje),• błędów zapisu i przetwarzania danych,• anomalii EGNOS dla których możliwe jest udowodnienie, że wystąpiły one
z akceptowalnym prawdopodobieństwem,• anomalii poszczególnych charakterystyk: wiarygodność, ciągłość.
• Metody końcowej i ostatecznej oceny charakterystyk SIS.
24
Zastosowanie metod oceny SIS
• Wyniki analiz poszczególnych charakterystyk systemu oraz szczegółowe dane odnośnie testowanego poziomu jakości usług powinny być przedstawione w sposób ułatwiający ich analizę i ocenę.
• Opracowane metody będą spełniały wymagania ICAO pozwalając na przeprowadzenie procedur certyfikacji SIS do zastosowań w poszczególnych typach podejść do lądowania.
• Spodziewanym efektem końcowym prowadzonych badań oraz wykonanych opracowań będzie dopuszczenie wykorzystania GNSS w nawigacji trasowej, terminalowej i przede wszystkim dla podejść do lądowania na lotniskach w Polsce.

Dziękuję
Krzysztof Banaszek - [email protected]
Uwaga: Przedstawione opinie nie są oficjalnym stanowiskiem ULC ani PPL/ARL.© Wykorzystanie całości lub części niniejszej prezentacji – wyłącznie za zgodą autora.

































