Embed Size (px)
Citation preview

Analiza kinematyczna i dynamiczna mechanizmów za pomocą
MSC.visualNastran

Spis treści
Omówienie programu MSC.visualNastran
Analiza mechanizmu korbowo – wodzikowego
Analiza mechanizmu drgającego
Analiza mechanizmu młotkowiertarki
Wnioski

MSC.visualNastran 4D
MSC.visualNastran 4D (nV4D) jest oprogramowaniem służącym do łączenia symulacji ruchu i obciążeń w jeden działający model. Pozwala na wykonanie zintegrowanych symulacji ruchów dynamicznych i obciążeń w jednym programie bez potrzeby użycia pośrednich plików lub łączenia się z innymi programami.
Za pomocą nV4D można prowadzić symulację ruchu zamodelowanej konstrukcji, zrozumieć warunki obciążenia dynamicznego, zakładać warunki brzegowe w analiziewytrzymałościowej w funkcji czasu i przedstawiać wyniki tej analizy.
Ruch – używając symulacji ruchu możemy konstruować proste modele ze skomplikowanymi elementami takimi jak siłowniki, tłumiki, przekładnie i sprężyny. Istnieje również możliwość wczytywania danych modelu geometrycznego z większości środowisk CAD.

Analiza wytrzymałościowa – w vN4D można przedstawić symulację naprężeń, odkształceń lub drgań elementów modelu i wykonać analizę strukturalną.
Wizualizacja – szybki dostęp do prawie każdego pliku CAD. Możliwość zmiany widoku, wymiarów, oznakowań elementów i własności modelu.
Fizyczna animacja – użycie realistycznej animacji, łącznie z kierowaną kamerą, możliwością ustawienia świateł i rozdzieleniem elementówmodelu.

Analiza mechanizmu korbowo – wodzikowego
Rozpatrzymy symetryczny mechanizm korbowo –wodzikowy (zwykły mechanizm korbowy) składający się z korby OB = r, obracającej się w płaszczyźnie pionowej względem punktu O, i korbowodu AW = l połączonego przegubowo z korbą. Na końcu W korbowodu umieszczony jest wodzik poruszający się po torze poziomym.
W obliczeniach porównamy wyniki przemieszczenia, prędkości i przyspieszenia wodzika, prędkości i przyspieszenia kątowe korbowodu. Wyniki otrzymane analitycznie porównamy z wynikami numerycznymi otrzymanymi za pomocą systemu visualNastran. Rozpatrywany mechanizm korbowo – wodzikowy przedstawiony został na rysunku.
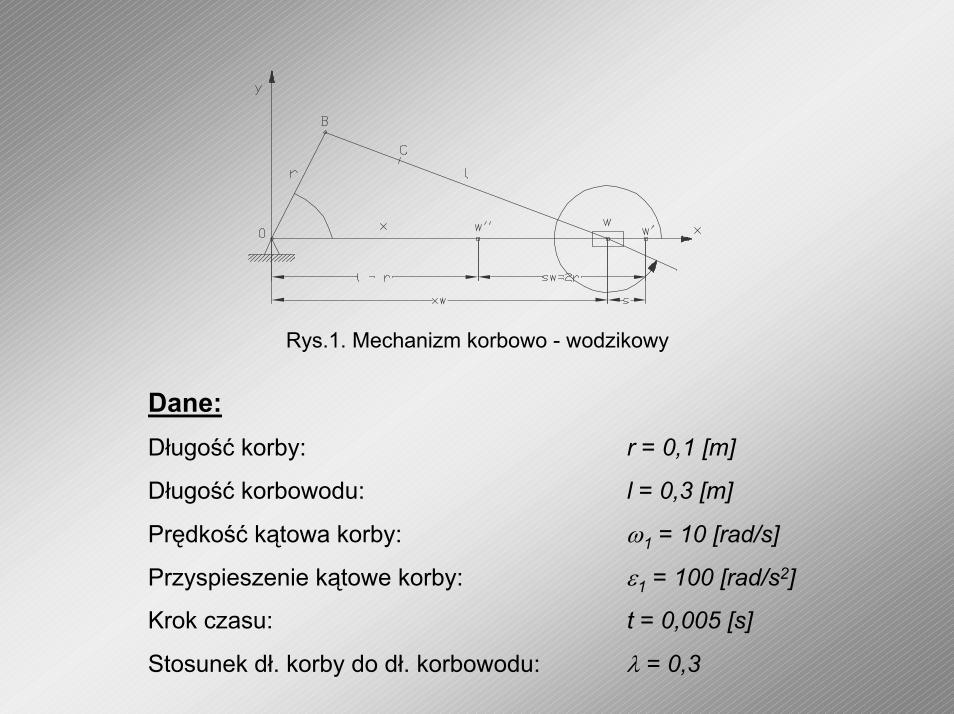
Rys.1. Mechanizm korbowo - wodzikowy
Dane:Długość korby: r = 0,1 [m]
Długość korbowodu: l = 0,3 [m]
Prędkość kątowa korby: ω1 = 10 [rad/s]
Przyspieszenie kątowe korby: ε1 = 100 [rad/s2]
Krok czasu: t = 0,005 [s]
Stosunek dł. korby do dł. korbowodu: λ = 0,3

Obliczenia:Przemieszczenie wodzika
Prędkość wodzika
Przyspieszenie wodzika
Prędkość kątowa korbowodu
Przyspieszenie kątowe korbowodu
( ) ( )αλα 2cos14
cos1 −−−= rrs
αλωαω 2sin2
sin1 rrv −=
αλωαω 2cossin 21
21 rp −=
βαωλω
coscos
2 =
ββωαλεαλωε
cossincossin 2
112
12
+−=

Wartości przemieszczeń, prędkości, przyspieszeń, prędkości kątowych i przyspieszeń kątowych zostały obliczone za pomocąsystemu visualNastran i odczytane z wyeksportowanego pliku.
Obliczenia analityczne zostały wykonane co 0,005 sekundy i zestawione w programie Microsoft Excel.
Rys.2. Widok mechanizmu korbowo – wodzikowego w systemie visualNastran.

Prze mie s zcze nia wodzika
0,00
0,05
0,10
0,15
0,20
0,25
0 0,07 0,14 0,21 0,28 0,35 0,42 0,49 0,56 0,63
Czas [s ]
Prz
emie
szcz
enie
[m]
Ana litycznie
vis ua lNa s tra n
Błąd vis ua lNa s tra n
Rys.3. Wykres przemieszczeń wodzika.
Przys pie s ze nia wodzika
-15
-10
-5
0
5
10
0 0,07 0,13 0,2 0,26 0,33 0,39 0,46 0,52 0,58
Czas [s ]
Przy
spie
szen
ie [m
/s2]
Analitycznievis ualNas tranBłąd vis ualNas tran
Prędkoś ci wodzika
-1,5
-1
-0,5
0
0,5
1
1,5
0 0,07 0,13 0,2 0,26 0,33 0,39 0,46 0,52 0,58
Czas [s ]
Pręd
kość
[m/s
]
Ana litycznie
vis ua lNa s tra n
Błąd vis ua lNa s tra n
Rys.4. Wykres prędkości wodzika. Rys.5. Wykres przyspieszeń wodzika.

Prędkoś ci kątowe korbowodu
-4
-3
-2
-1
0
1
2
3
4
0 0,06 0,12 0,18 0,24 0,3 0,36 0,42 0,48 0,54 0,6
Czas [s]
pręd
kość
kąt
owa
[rad
/s]
Analitycznievis ualNas tranBłąd vis ualNas tran
Rys.6. Wykres prędkości kątowych korbowodu.
Przys pie s ze nia kątowe korbowodu
-40
-30
-20
-10
0
10
20
30
40
0 0,07 0,14 0,21 0,28 0,35 0,42 0,49 0,56 0,63
Czas [s ]
Przy
spie
szen
ie kąt
owe
[rad
/s2] Analitycznie
vis ualNas tranBłąd vis ualNas tran
Rys.7. Wykres przyśpieszeń kątowych korbowodu.

WnioskiImport danych z systemu visualNastran umożliwił obliczenie przemieszczeń, prędkości i przyspieszeń wodzika, a także prędkości i przyspieszeń kątowych korbowodu dla każdego kroku czasu. Obliczenia analityczne i numeryczne były przeprowadzone dla tych samych kroków czasu.
Jak widać na wykresach obliczenia analityczne i numeryczne w większości przypadków pokrywają się. Błędy możemy zaobserwować w miejscach, w których mechanizm zmieniał kierunek ruchu. Największy błąd wystąpił w obliczeniach przyspieszenia wodzika i wyniósł średnio 8%.
Średnie błędy wartości obliczonych numerycznie w stosunku do obliczeńanalitycznych wynoszą:
Przemieszczenia wodzika 7,5%
Prędkości wodzika 7%
Prędkości kątowych korbowodu 6,7%
Przyspieszeń kątowych korbowodu 6,8%

Analiza mechanizmu drgającego.Będziemy rozpatrywać walec o wysokości h, promieniu podstawy r i masie m zawieszony na sprężynie o sztywności k. Porównamy wyniki przemieszczenia i przyspieszenia masy, otrzymane za pomocą obliczeń analitycznych z wynikami obliczeń dokonanych w programie visualNastran.
Mechanizm przedstawiono na rysunku 8.
x
Rys.8. Mechanizm drgający

Dane:Promień walca: r = 0,03 [m]
Wysokość walca: h = 0,1 [m]
Masa walca: m = 2 [kg]
Stała sprężyny: k = 100 [N/m]
Krok czasu: t = 0,02 [s]
Obliczenia:Przemieszczenie
Przyspieszenie
tmkx ⋅= cos
xmkp ⋅=

Wartości przemieszczeń i przyspieszeń zostały obliczone za pomocąsystemu visualNastran i odczytane z wyeksportowanego pliku.
Obliczenia analityczne zostały wykonane co 0,02 sekundy i zestawione w programie Microsoft Excel.
Rys.9. Widok mechanizmu w systemie visualNastran

Przemies zczenia
-0,2
-0,15
-0,1
-0,05
0
0,05
0,1
0,15
0,2
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2 2,2 2,4
Czas [s ]
Prze
mie
szcz
enie
[m]
visua lNas tranAna litycznieBłąd visua lNas tran
Rys.9. Wykres przemieszczeń mechanizmu drgającego
P rzys pie s ze nia
-1 0
-8
-6
-4
-2
0
2
4
6
8
1 0
0 0 ,2 0 ,4 0 ,6 0 ,8 1 1 ,2 1 ,4 1 ,6 1 ,8 2 2 ,2 2 ,4
Cz as [s ]
Przy
spie
szen
ie [N
/m2]
vis ua lNa s tra nAna litycznieB łą d vis ua lNa s tra n
Rys.10. Wykres przyspieszeń mechanizmu drgającego

Wnioski
Import danych z systemu visualNastran umożliwił obliczenie przemieszczeń i przyspieszeń dla każdego kroku czasu. Daje nam to pewność, że otrzymane wyniki metodą analityczną i numeryczną będąporównywane dla tych samych kroków czasu.
Jak widać na wykresie przemieszczeń, wyniki obliczone analitycznie i numerycznie różnią się tylko nieznacznie. Największa różnica występują w miejscu maksymalnego wychylenia walca w kierunku osi x. Jest to spowodowane niedokładnościami zamocowania i zdefiniowania własności sprężyny w systemie visualNastran. Pomijając te dane, średni błąd wartości przemieszczeń obliczonych numerycznie w stosunku do obliczeń analitycznych wynosi 8,5 %.
W przypadku obliczonych przyspieszeń występują mniejsze błędy, które mają średnią wartość 3 %.

Analiza mechanizmu młotkowiertarki
Przeanalizujemy elementy młotkowiertarki, której schemat przedstawiono na rys.11. Rozpatrywane będą takie elementy jak: bijak, tłok pływający, tłok, korbowód.
Moment obrotowy z silnika przekazywany jest na korbowód, który wprawia tłok znajdujący się w cylindrze w ruch posuwisto –zwrotny. Między tłokiem a tłokiem pływającym znajduje się gaz. Ruch posuwisto – zwrotny tłoka powoduje ściśnięcie gazu, który oddziałuje ciśnieniem na tłok pływający. Tłok pływający uderza w bijak, zaś ten w wiertło, powodując udar. Z powodu trudności zamodelowania, w systemie visualNastran, ciśnienia gazu zastąpiono je sprężyną pomiędzy tłokiem a tłokiem pływającym.

Rys.11. Mechanizm młotkowiertarki

Obliczenia sztywności sprężynyCiśnienie pomiędzy tłokami zastępujemy sprężyną o sztywności k. W tym celu musimy obliczyć maksymalne ciśnienie pomiędzy tłokami. Początkowe ciśnienie jest znane i wynosi 1 atmosferę.
Położenie początkowe
V1,p1Tłok pływający Tłok
h1
Położenie końcowe
V2,p2Tłok pływający
Tłok
h2

Dane:Ciśnienie początkowe p1 = 1 atm. = 98066,5 [N/m2]
Promień tłoków r = 0,009 [m]
Przemieszczenie tłoka pływającego u = 0,005 [m]
Pole powierzchni czoła tłoka A = 0,000254 [m2]
Wys. przestrzeni pomiędzy tłokami
- położenie początkowe h1 = 0,0378 [m]
- położenie końcowe h2 = 0,0241 [m]
Obliczenia:
2211 pVpV =
Objętość przestrzeni pomiędzy tłokami w położeniu początkowym
][00000962,0 31
21 mhrV ==π
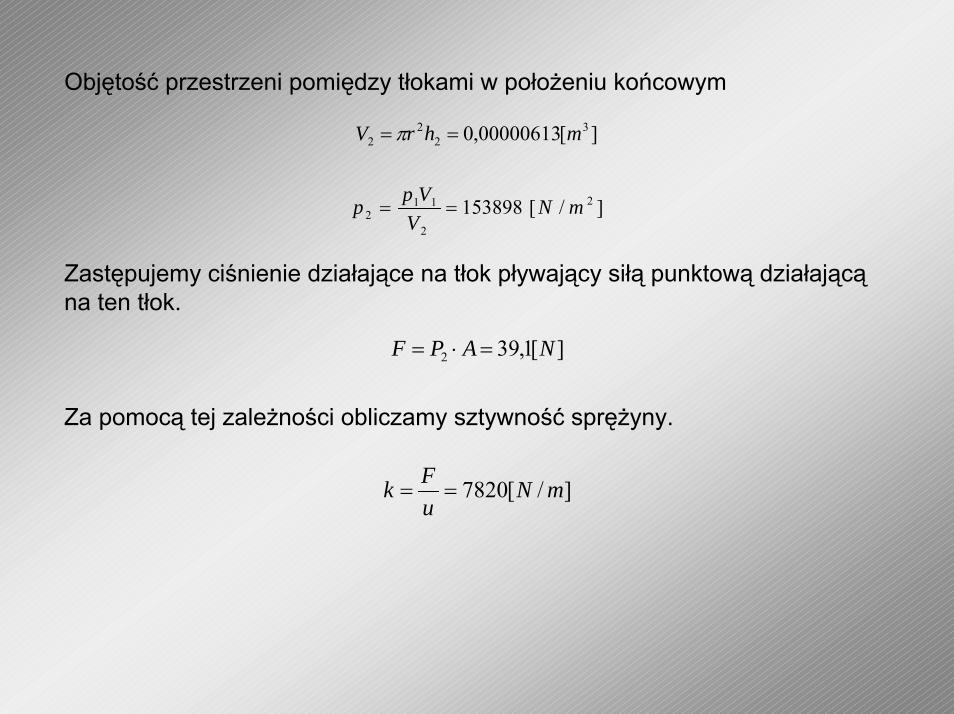
Objętość przestrzeni pomiędzy tłokami w położeniu końcowym
][00000613,0 32
22 mhrV ==π
]/[153898 2
2
112 mN
VVpp ==
Zastępujemy ciśnienie działające na tłok pływający siłą punktową działającąna ten tłok.
][1,392 NAPF =⋅=
Za pomocą tej zależności obliczamy sztywność sprężyny.
]/[7820 mNuFk ==

Wyniki analizy bijaka i tłoka pływającego młotkowiertarkiPorównamy wyniki analizy przeprowadzonej w stanie bez obciążenia z
wynikami analizy w stanie obciążenia. Obciążenie symulowane będzie poprzez siłępunktową o wartości równej 100 [N] przyłożonej do bijaka, w sposób jaki przedstawiono na rys.12. Za pomocą systemu visualNastran obliczone zostanąprzemieszczenia, prędkości i przyspieszenia bijaka i tłoka pływającego.
Rys.12. Mechanizm młotkowiertarki z obciążeniem

Prze mie s zc ze nia bijaka
0
0
0
0
0
0
0
0
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Czas [s ]
Prze
mie
szcz
enie
[m]
Be z obcią że nia
Z obcią że nie m
Prę dko ś c i bijaka
-5-4-3-2-1012345
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Czas [s ]
Pręd
kość
[m/s
]
Bez obciążenia
Z obciążeniem
Przys pie s ze nia bijaka
-5000-4000-3000-2000-1000
010002000
0 0,1 0,3 0,4 0,6 0,7 0,9
Czas [s ]
przy
spie
szen
ie [m
/s2]
Be z obcią że nia
Z obcią że nie m
Wykresy obliczeń przemieszczenia, prędkości i przyspieszenia bijaka młotkowiertarki w stanie z i bez obciążenia.
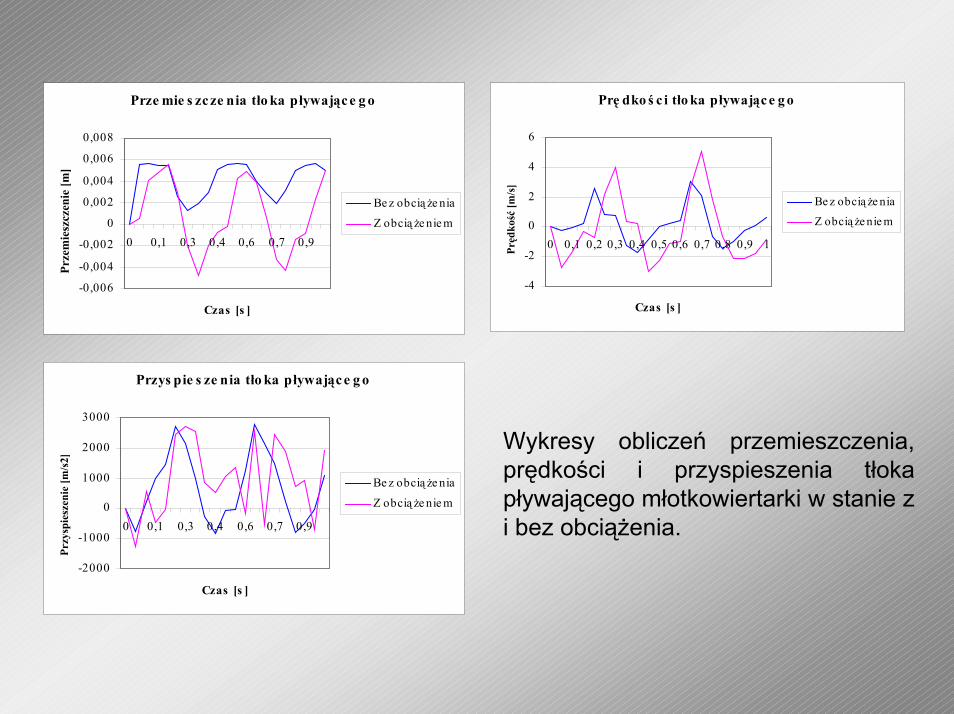
Prze mie s zc ze nia tło ka p ływając e g o
-0,006
-0,004
-0,002
0
0,002
0,004
0,006
0,008
0 0,1 0,3 0,4 0,6 0,7 0,9
Czas [s ]
Prze
mie
szcz
enie
[m]
Be z obcią że nia
Z obcią że nie m
Prę dko ś c i tło ka p ływając e g o
-4
-2
0
2
4
6
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Czas [s ]
Pręd
kość
[m/s
]
Be z obcią że nia
Z obcią że nie m
Przys pie s ze nia tło ka p ływające g o
-2000
-1000
0
1000
2000
3000
0 0,1 0,3 0,4 0,6 0,7 0,9
Czas [s ]
Przy
spie
szen
ie [m
/s2]
Be z obcią że nia
Z obcią że nie m
Wykresy obliczeń przemieszczenia, prędkości i przyspieszenia tłoka pływającego młotkowiertarki w stanie z i bez obciążenia.

Literatura
1. Zdzisław Parszewski: „Teoria maszyn i mechanizmów”, Wydawnictwa Naukowo -Techniczne, Warszawa, 1965.
2. Jerzy Leyko :„Mechanika ogólna tom 1 Statyka i kinematyka”, PWN, Warszawa, 1999.
3. Jerzy Leyko: „Mechanika ogólna tom 2 Dynamika”, PWN, Warszawa, 1999.
4. Jan Misiak: „Zadania z mechaniki ogólnej, część II Kinematyka”, Wydawnictwa Naukowo - Techniczne, Warszawa, 1994.
5. Jan Misiak: „Zadania z mechaniki ogólnej, część III Dynamika”, Wydawnictwa Naukowo - Techniczne, Warszawa, 1994.
6. Ewa Majchrzak, Bohdan Mochnacki: „Metody numeryczne. Podstawy teoretyczne, aspekty praktyczne i algorytmy”, Wydawnictwo Politechniki Śląskiej, Gliwice, 1998.
7. Strona programu visualNastran http://www.vndesktop.com.
8. Help Topics programu MSC.visualNastran 4D 2001.












![Serię siłowników P1S ze stali nierdzewnej skonstruowano ... · x =ghu]dnl dpruw\]xmÇfh ]zlÛnv]dmÇfh wuzd r É X 'RVWÛSQH Z ZHUVML ] UHJXORZDQÇ DPRUW\]DFMÇ Siłowniki ISO](https://img.dokumen.tips/doc/110x75/5c01ea7e09d3f20f068d7a50/serie-silownikow-p1s-ze-stali-nierdzewnej-skonstruowano-x-ghudnl-dpruwxmcfh.jpg)


![Siłowniki pneumatycznedownload.pneumatig.eu/pg-silowniki.pdf · p - ciśnienie powietrza [bar] 2S - czynna powierzchnia tłoka tzn. [cm] - do obliczania siły pchającej - do obliczania](https://img.dokumen.tips/doc/110x75/60c51ade074ef012ba428b98/siowniki-p-cinienie-powietrza-bar-2s-czynna-powierzchnia-toka-tzn-cm.jpg)













