Embed Size (px)
Citation preview

An Enhanced Framework for Link and Mode Identifications for GPS-Based Personal Travel Surveys
Amy Tsui and Amer Shalaby
University of TorontoJune 13, 2005
For PROCESSUS COLLOQUIUM
Presentation Outline
Background Objectives Tools and Methods Structure of Analysis System
Version 1: GPS-Alone System Version 2: GPS/GIS Integrated System
Results of Test Summary and Conclusion

Background Transportation planning models
Forecast and evaluate transportation scenarios Require good quality of travel survey data
Conventional self-reporting survey method The most popular survey method Lack of reporting short trips and actual routes traveled Poor data quality due to depending on participant’s report The amount of detail that it is feasible to ask individuals and
households to report is restricted
BackgroundA Vision for New Technology in Travel
Survey GPS technology:
Accuracy in collecting travel survey information
Less burden on survey participants Large amount of GPS data requires
processing tools & analysis methods to maximize benefits

Application scenario of the GPS-based Survey
Analysis Tools automatically extract trip data of interest from GPS trace data, such as traveled link, used mode and activity
However, there are limitations to identify all trip data only from GPS trace
We need additional prompted recall survey.
Trip data is collected by participants using GPS
GPS data is processed
by analysis
tools
Prompted recall survey
to verify results from
analysis tools
GPS data is sent to central
server at the end of day

Objectives
Develop an integrated GPS-GIS analysis tool to automate GPS-based personal travel survey.
The developed tool can automatically identify traveled road links and used modes based on GPS data.
Two versions GPS-alone framework GPS/GIS integrated framework
Trip data is collected by participants using GPS
GPS data is processed
by analysis
tools
Prompted recall survey
to verify results from
analysis tools
GPS data is sent to central
server at the end of day

Tools and Methods GPS unit:
GeoStats Wearable Geologger Stores one-day GPS trace data of a survey participant
Software: Visual Basics 6.0 ArcGIS: ArcMap, ArcObject NEFCLASS-J: a neuro-fuzzy classifying software
Methodological Approach: Fuzzy Logic
[GeoStats, 2003]
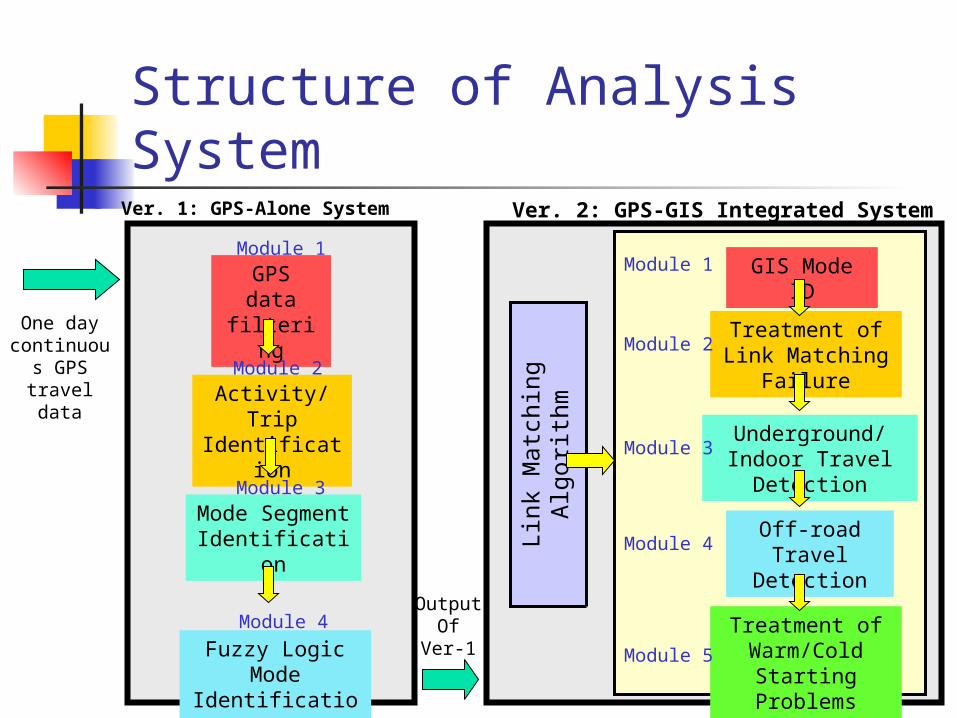
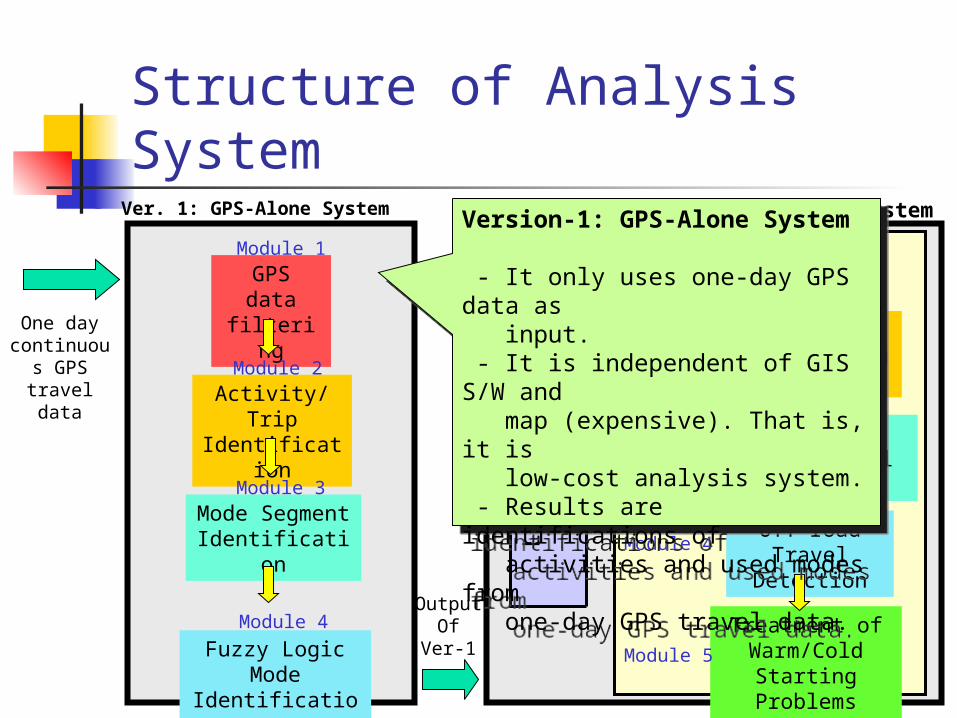
Structure of Analysis System
GPS data filtering
Activity/Trip Identification
Mode Segment
Identification
Fuzzy Logic Mode
Identification
One day continuou
s GPS travel data
Ver. 1: GPS-Alone System
Module 1
Module 2
Module 4
Module 3
GIS Mode ID
Treatment of Link Matching
Failure
Underground/Indoor Travel
Detection
Off-road Travel
Detection
Ver. 2: GPS-GIS Integrated System
Module 1
Module 2
Module 4
Module 3
Treatment of Warm/Cold
Starting Problems
Module 5
Lin
k M
atc
hin
g
Alg
ori
thm
OutputOf
Ver-1
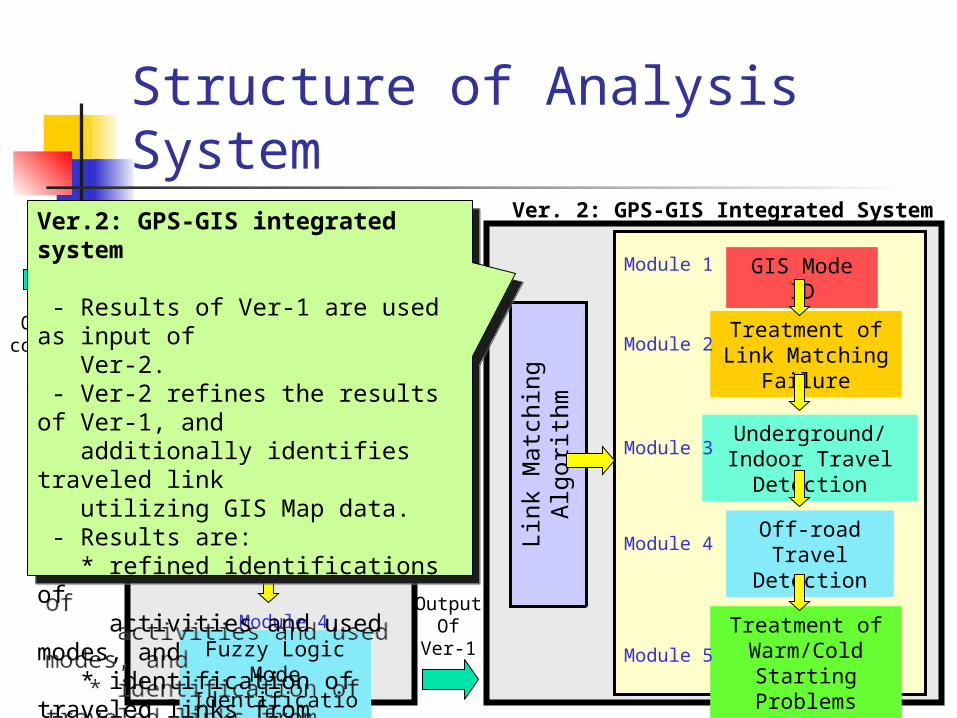
Structure of Analysis System
GPS data filtering
Activity/Trip Identification
Mode Segment
Identification
Fuzzy Logic Mode
Identification
One day continuou
s GPS travel data
Ver. 1: GPS-Alone System
Module 1
Module 2
Module 4
Module 3
GIS Mode ID
Treatment of Link Matching
Failure
Underground/Indoor Travel
Detection
Off-road Travel
Detection
Ver. 2: GPS-GIS Integrated System
Module 1
Module 2
Module 4
Module 3
Treatment of Warm/Cold
Starting Problems
Module 5
Lin
k M
atc
hin
g
Alg
ori
thm
Version-1: GPS-Alone System
- It only uses one-day GPS data as input. - It is independent of GIS S/W and map (expensive). That is, it is low-cost analysis system. - Results are identifications of activities and used modes from one-day GPS travel data.
Version-1: GPS-Alone System
- It only uses one-day GPS data as input. - It is independent of GIS S/W and map (expensive). That is, it is low-cost analysis system. - Results are identifications of activities and used modes from one-day GPS travel data.
OutputOf
Ver-1
Structure of Analysis System
GPS data filtering
Activity/Trip Identification
Mode Segment
Identification
Fuzzy Logic Mode
Identification
One day continuou
s GPS travel data
Ver. 1: GPS-Alone System
Module 1
Module 2
Module 4
Module 3
GIS Mode ID
Treatment of Link Matching
Failure
Underground/Indoor Travel
Detection
Off-road Travel
Detection
Ver. 2: GPS-GIS Integrated System
Module 1
Module 2
Module 4
Module 3
Treatment of Warm/Cold
Starting Problems
Module 5
Lin
k M
atc
hin
g
Alg
ori
thm
OutputOf
Ver-1
Ver.2: GPS-GIS integrated system
- Results of Ver-1 are used as input of Ver-2. - Ver-2 refines the results of Ver-1, and additionally identifies traveled link utilizing GIS Map data. - Results are: * refined identifications of activities and used modes, and * identification of traveled links from one-day GPS trace data.
Ver.2: GPS-GIS integrated system
- Results of Ver-1 are used as input of Ver-2. - Ver-2 refines the results of Ver-1, and additionally identifies traveled link utilizing GIS Map data. - Results are: * refined identifications of activities and used modes, and * identification of traveled links from one-day GPS trace data.
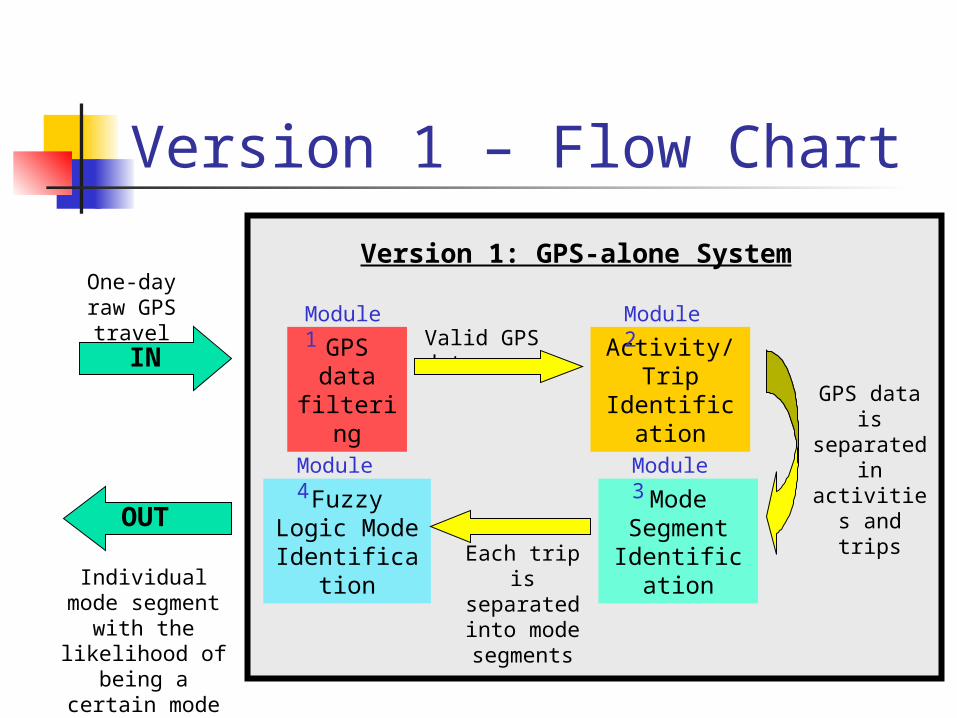
Version 1 – Flow Chart
GPS data
filtering
Activity/Trip
Identification
Mode Segment
Identification
Fuzzy Logic Mode
Identification
One-day raw GPS
travel data Valid GPS data
Each trip is
separated into mode segments
Individual mode segment with the
likelihood of being a certain
mode
Version 1: GPS-alone System
GPS data is separated
in activities and trips
OUT
IN
Module 1
Module 2
Module 4
Module 3
Module 1: Data Filtering Eliminate invalid GPS data
Based on GPS data filters provided by Laval University (project partner of this research)
Additional filtering rules to eliminate possible noised GPS points, such as:
Low no. of Satellites (<= 3) High HDOP (> 5) Sudden jump points (Typical noised output of GPS data in urban canyon area)
Module 2: Activity Identification By identifying activities of a GPS trace data, we can
separate the GPS data into trip and activity segments.
Definition of activity Activity is basically defined by dwell time (120 sec). Two categories of activities according to GPS signal
availability: Outdoor activity and Indoor activity
Outdoor Activity (No signal loss during Activity) If Zero speed GPS trace (dwell time) > 120sec, the set of points
are considered as activities. * The rule may also capture “waiting bus” or “delay by traffic
congestion” as outdoor activities.

Module 2: Activity Identification Definition of activity
Outdoor activity and Indoor activity
Indoor Activity (Signal loss during Activity) Indoor activity is sub-divided into: Short duration indoor activity Underground/indoor activity** Long duration indoor activity These three sub-activities are re-categorized by the duration time of
the signal loss (dwell time), and distance of the gap by the signal loss. ** Feature of Underground/indoor activity is very similar to that of
subway trip. Underground/indoor activities can include subway trip.
Possible errors to detect activities: the activities are defined based on movement patterns of GPS trace

Module 3:Mode Segment Identification Multi-modal trip combines properties of different travel modes
in one GPS trip segment Goal: Divide a trip segment into mode segment such that each
segment travel on one mode Mode segments will be separated by points called “Mode
Transfer Point” (MTP)
Two-Step Procedure to detect MTP (Rule based)
Step 1) Search All Potential
MTP’s
Step 2) MTP Selection
MTP
MTP
GPS data in Trip
Segment
GPS data in Mode
Segment
Trip seg.
Mode seg.
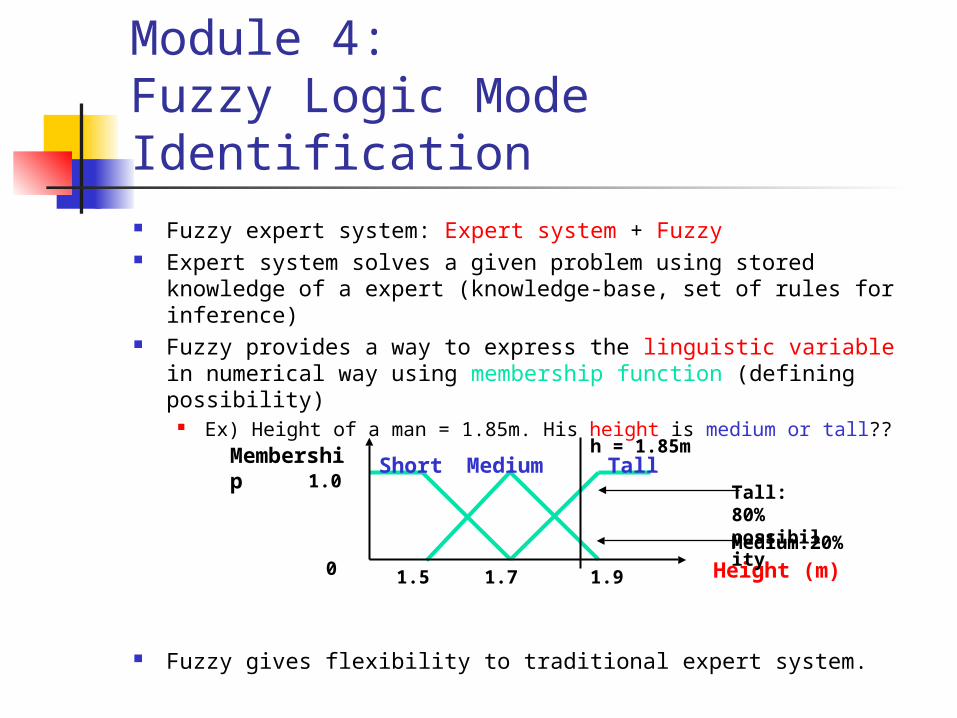
Module 4:Fuzzy Logic Mode Identification Fuzzy expert system: Expert system + Fuzzy Expert system solves a given problem using stored knowledge
of a expert (knowledge-base, set of rules for inference) Fuzzy provides a way to express the linguistic variable in
numerical way using membership function (defining possibility)
Ex) Height of a man = 1.85m. His height is medium or tall??
Fuzzy gives flexibility to traditional expert system.
Short Medium Tall
1.91.5 1.7 Height (m)
Membership1.0
0
h = 1.85m
Tall: 80% possibility
Medium:20%

Module 4:Fuzzy Logic Mode Identification Estimate used mode for each mode segment using
fuzzy logic Input variables:
95 percentile value of GPS speed data Mean value of GPS speed data Median value of acceleration profile from GPS speed data Data quality (Total Valid Records / Total Records)
Mode classifications (output) walk, cycle, bus, auto
Membership functions (fuzzifying the input variables) Triangular membership functions Calibrate the membership functions using NEFCLASS-J S/W
Inference Rule: 14 decision rules
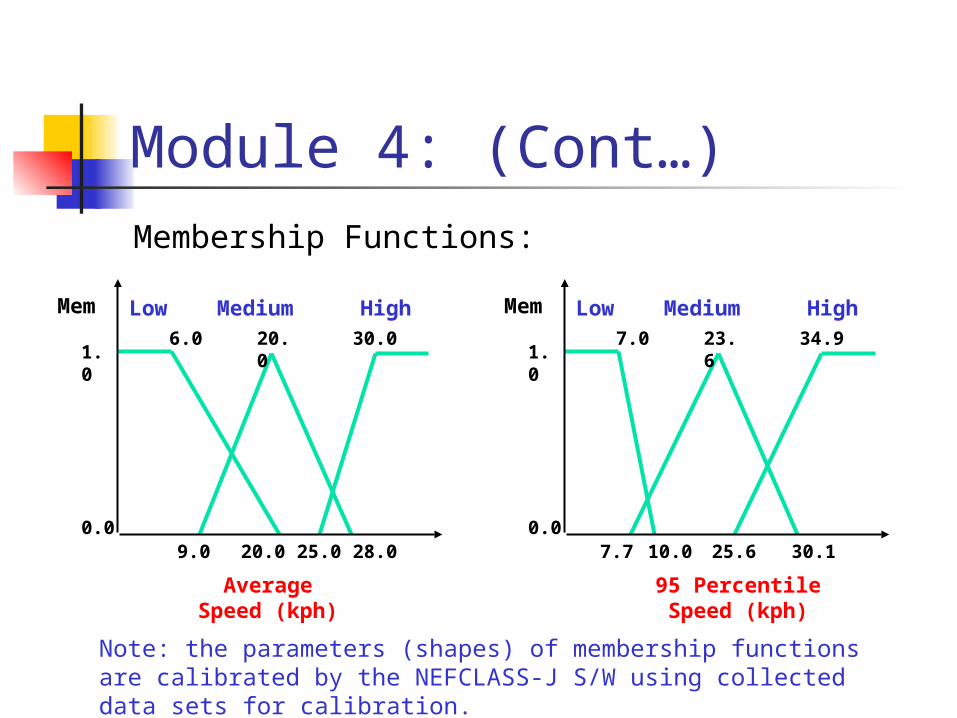
Module 4: (Cont…)Membership Functions:
Low Medium High
28.09.0 20.0
Average Speed (kph)
Mem
1.0
0.0
6.0 20.0 30.0
25.0
Low Medium High
30.17.7 10.0
95 Percentile Speed (kph)
Mem
1.0
0.0
7.0 23.6 34.9
25.6
Note: the parameters (shapes) of membership functions are calibrated by the NEFCLASS-J S/W using collected data sets for calibration.
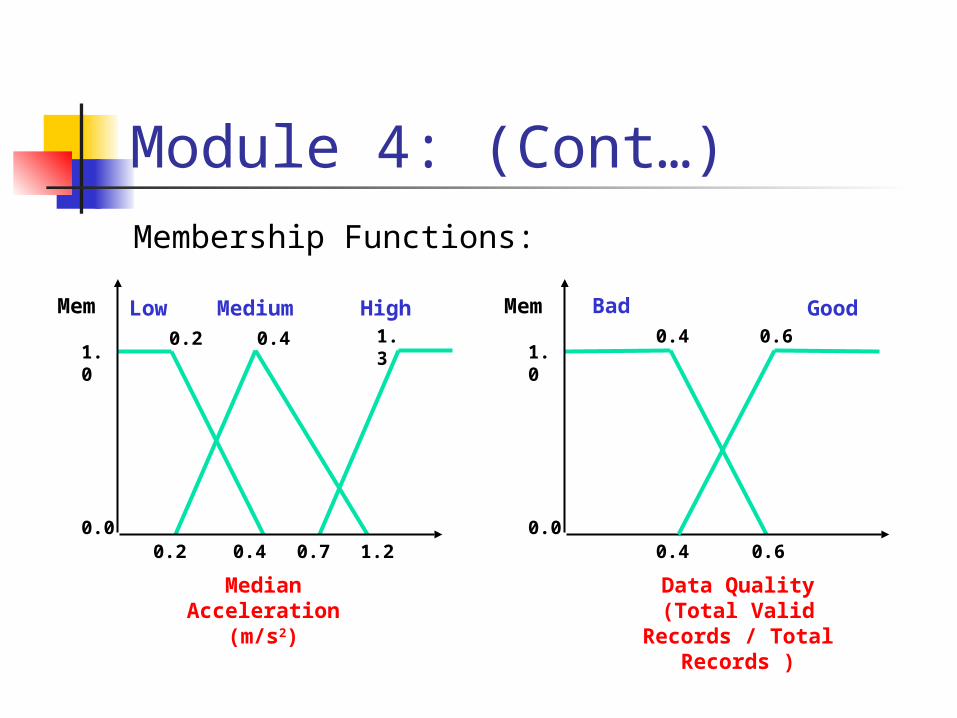
Module 4: (Cont…)Membership Functions:
Low Medium High
1.20.2 0.4
Median Acceleration (m/s2)
Mem
1.0
0.0
0.2 0.4 1.3
0.7
Bad Good
0.4
Data Quality(Total Valid Records /
Total Records )
Mem
1.0
0.0
0.4 0.6
0.6
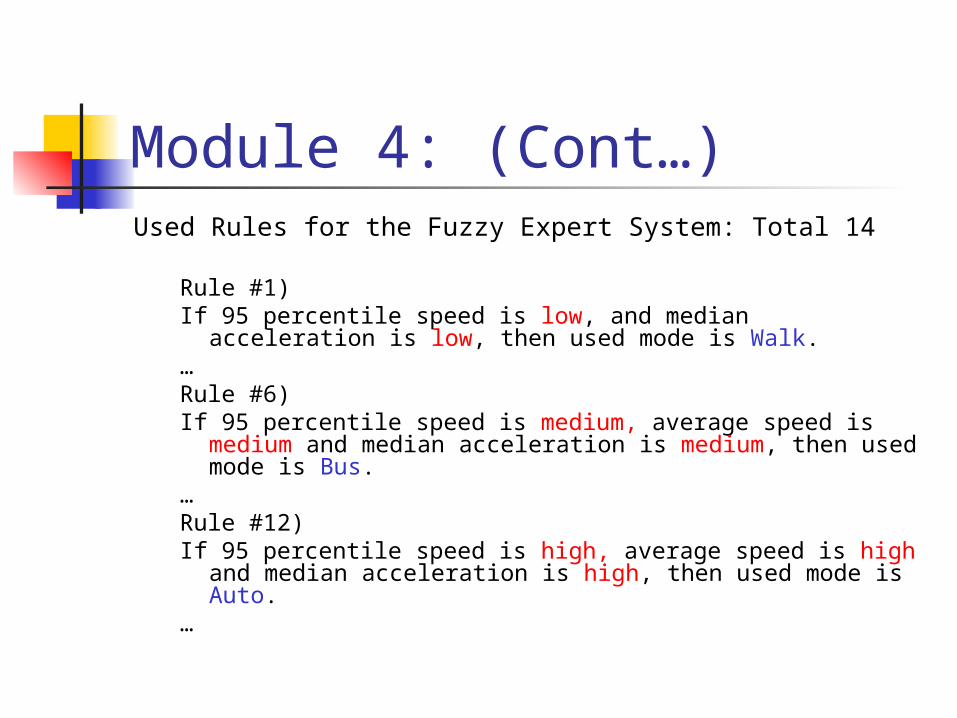
Module 4: (Cont…)Used Rules for the Fuzzy Expert System: Total 14
Rule #1)If 95 percentile speed is low, and median acceleration is low,
then used mode is Walk.…Rule #6)If 95 percentile speed is medium, average speed is medium
and median acceleration is medium, then used mode is Bus.
…Rule #12)If 95 percentile speed is high, average speed is high and
median acceleration is high, then used mode is Auto.…

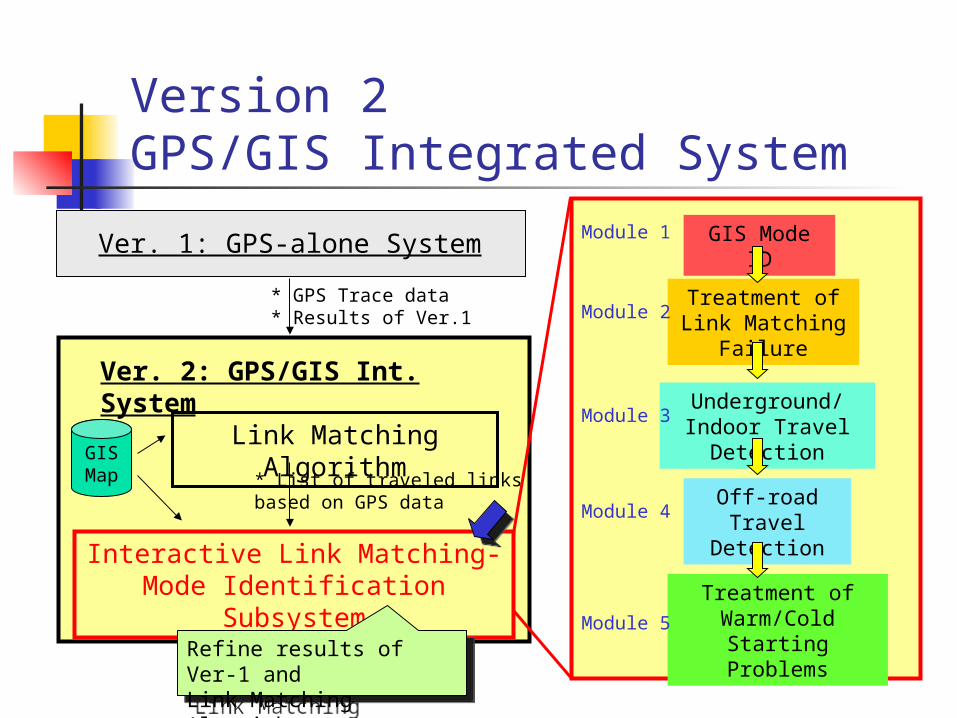
Version 2GPS/GIS Integrated System
Ver. 1: GPS-alone System
Link Matching Algorithm
Interactive Link Matching-Mode Identification Subsystem
Ver. 2: GPS/GIS Int. System
GIS Mode ID
Treatment of Link Matching
Failure
Underground/Indoor Travel
Detection
Off-road Travel
Detection
Module 1
Module 2
Module 4
Module 3
Treatment of Warm/Cold
Starting ProblemsModule 5
* List of traveled linksbased on GPS data
GISMap
* GPS Trace data* Results of Ver.1
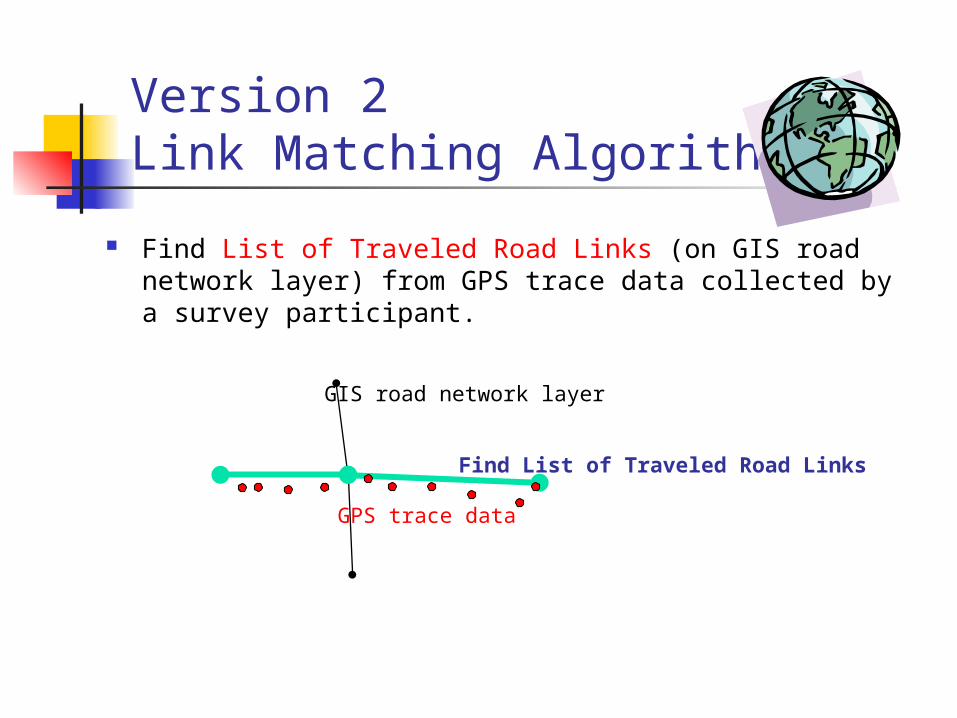
Version 2Link Matching Algorithm
Find List of Traveled Road Links (on GIS road network layer) from GPS trace data collected by a survey participant.
GIS road network layer
GPS trace data
Find List of Traveled Road Links

Version 2Link Matching Algorithm
Find List of Traveled Road Links (on GIS road network layer) from GPS trace data collected by a survey participant.
Developed by Chung in 2003 at U of T
It strictly depends on GPS trace data. Good Quality of GPS data Good Results Poor Quality of GPS data No results It will produce a lots of gaps for poor quality GPS data,
because it does not have estimation logic for the gaps.
The Module2 of the Version 2 will provide treatments to fill the gaps.
Version 2GPS/GIS Integrated System
Ver. 1: GPS-alone System
Link Matching Algorithm
Interactive Link Matching-Mode Identification Subsystem
Ver. 2: GPS/GIS Int. System
GIS Mode ID
Treatment of Link Matching
Failure
Underground/Indoor Travel
Detection
Off-road Travel
Detection
Module 1
Module 2
Module 4
Module 3
Treatment of Warm/Cold
Starting ProblemsModule 5
* List of traveled linksbased on GPS data
GISMap
* GPS Trace data* Results of Ver.1
Refine results of Ver-1 and Link Matching Algorithm
Refine results of Ver-1 and Link Matching Algorithm
Module 1: GIS Mode Identification Revise the identified mode of version-1 using transit
route information on GIS data Differentiate transit modes from others based on
availability of transit routes
Rule-based (total 4 rules)
Example of one rule used in the moduleResult of Ver-1 for a mode segment: “Used mode = Bus”
“Module 1” check transit route availability, andIf route is found, keep the result of V1. Used Mode=BusIf route is not found, revise the result of V1. Used Mode=Auto
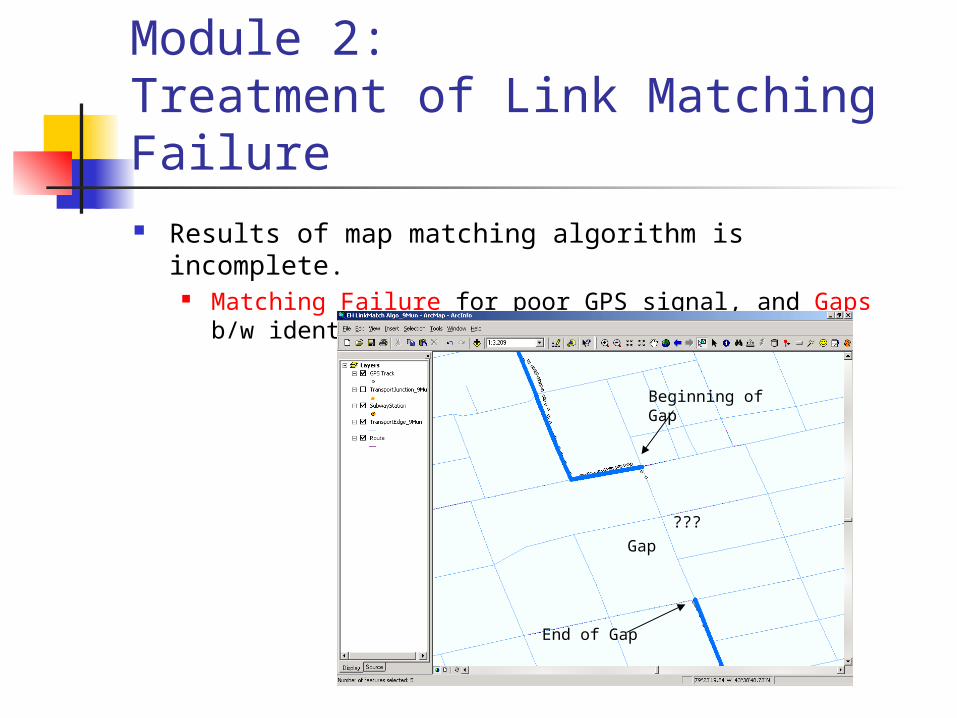
Module 2:Treatment of Link Matching Failure Results of map matching algorithm is incomplete.
Matching Failure for poor GPS signal, and Gaps b/w identified links.
Beginning of Gap
End of Gap
Gap
???

Module 2:Treatment of Link Matching Failure Find (estimate or guess) set of links connecting
beginning and end of gap which were most likely traveled by a survey participant.
Beginning of Gap
End of Gap

Module 2:Treatment of Link Matching Failure Find (estimate or guess) set of links connecting beginning and
end of gap which were most likely traveled by a survey participant.
Define various rules to fill the gaps i.e., The rules define how to fill the gap according to pre-defined
gap patterns.
This treatment may not estimate perfectly correct set of links connecting gap.
We don’t have perfect GPS data for the gaps. This treatment is estimation, even though it tries to utilize the all
given possible clues for better estimation.
Module 3: Underground/Indoors Travel Detection
Underground/indoor activity in activity identification of Version-1
Although the underground/indoor activity is defined as activity in Ver-1, it can be subway trip.
This Module of Version-2 tries to check if the activity is subway trip.
This module is applied to segments categorized as undergrd/indoor activity in Ver-1.
How?: check if there are subway stations around starting and ending points of this activity
Yes Update this activity to Subway trip
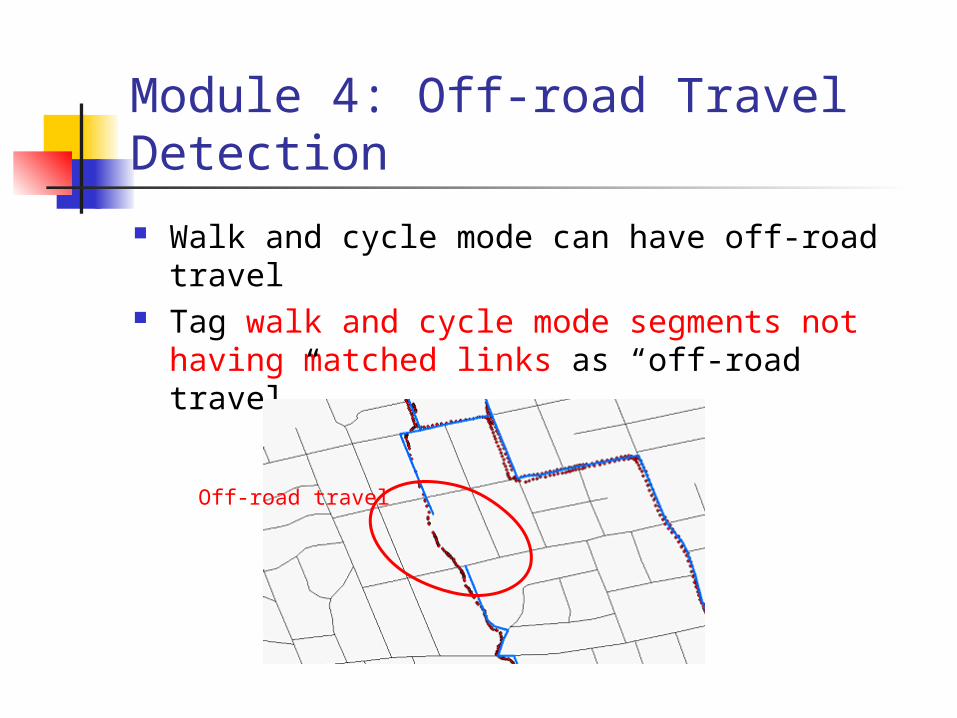
Module 4: Off-road Travel Detection
Walk and cycle mode can have off-road travel Tag walk and cycle mode segments not having
matched links as “off-road travel”
Off-road travel

Module 5: Treatment of Warm/Cold Starting Problems
GPS unit needs some time of satellite acquisition.
No GPS data during the satellite acquisition
Treatment by the Gap filling rules of Module 2 (Treatment of Link Matching Failure)
Test and Results Collected Data: Total 58 one-day trips in Toronto Area
For Version1: 28 trips are used to calibrate the Fuzzy model
Activity identification (Version1) All activities are detected. Results show some overestimation of activities for traffic
congestion, long traffic signal… Mode identification (Version1 & Version2)
Good detection rates Version1 (91%) and Version2 (94%): 3% Improvement
Good detection rates for Auto and Walk Lowest detection rate for Bus
Link identification (Version2) Good detection rate (94%) for link identification

Summary and Conclusion Develop two versions of GPS data analysis tools Version 1:
Low cost, simple, location non-specified For user w/o GIS software & network
Version 2: Visualization (e.g. travel routes on GIS map) For user w/ GIS software & transportation networks
ALL activities were detected Over 90% detection rates for the two versions of
mode identification 94% average detection rate for link
identification
Summary and Conclusion
Delivers a package for GPS multi-modal travel survey data analysis
Provides usage flexibility and consistent results when combining the two versions of system
Benefits Cost, time reduction Detailed and accurate travel info
~ Thank You ~
Questions & Comments